MICROELETTRONICA
Prof. Mario Bertolaccini
AMPLIFICATORI
CMOS
A.A. 2006/07
I
AMPLIFICATORI CMOS
INDICE
1 GENERALITA’
1.1 CATEGORIE DI AMPLIFICATORI CMOS
1.2 RELAZIONI E PARAMETRI FONDAMENTALI DEI TRANSISTORI
MOSFET A CONFRONTO CON I TRANSISTORI BJT
2 TECNICHE DI POLARIZZAZIONE NEGLI AMPLIFICATORI CMOS
2.1 CIRCUITI DI POLARIZZAZIONE DIRETTAMENTE DERIVATI DALLE
TENSIONI DI ALIMENTAZIONE.
2.2 CIRCUITI DI POLARIZZAZIONE CON PICCOLA DIPENDENZA DALLE
TENSIONI DI ALIMENTAZIONE.
2.3 GENERATORI DI CORRENTE
3 AMPLIFICATORI CMOS A TRANSCONDUTTANZA (OTA) “ON CHIP”
3.1 AMPLIFICATORI MONOSTADIO
3.2 AMPLIFICATORI A DUE STADI
3.3 LA COMPENSAZIONE IN FREQUENZA
4 AMPLIFICATORI OPERAZIONALI CMOS (OPA) “STAND ALONE”
5 AMPLIFICATORI OPERAZIONALI CMOS COMPLETAMENTE
DIFFERENZIALI (“FULLY DIFFERENTIAL”
5.1 CARATTERISTICHE GENERALI DEGLI AMPLIFICATORI
COMPLETAMENTE DIFFERENZIALI
5.2 UN ESEMPIO MOLTO SEMPLICE DI AMPLIFICATORE
5.3 RETI CMF A TEMPO CONTINUO
5.4 RETI CMF A TEMPO DISCRETO (A CAPACITA’ COMMUTATE)
5.5 ESEMPI DI AMPLIFICATORI COMPLETAMENTE DIFFERENZIALI
BIBLIOGRAFIA
II
AMPLIFICATORI CMOS
Cap.1
GENERALITA’
1.1 CATEGORIE di AMPLIFICATORI CMOS
Si possono distinguere due categorie di amplificatori CMOS:
a) amplificatori singoli “general purpose” (amplificatori “stand-alone”);
o sorgenti e carichi non definiti (ad esempio carichi capacitivi sino a qualche centinaio
di pF e resistivi sino a meno di 1 k)
b) amplificatori all’interno di sistemi di maggiori dimensioni e con funzioni assai più ampie,
solitamente in grande prevalenza digitali
o sorgenti e carichi definiti, salvo, a volte, quando un amplificatore deve ricevere
dall’esterno o inviare all’esterno (“off-chip”) un segnale; quest’ultima situazione è
comunque poco frequente e si tratta in genere di “buffer” di uscita
Ci occupiamo qui quasi esclusivamente della seconda categoria, trattandosi di quella assai
più ampiamente rappresentata. In questo caso sono usualmente rilassate alcune specifiche proprie
degli amplificatori della categoria a). Ad esempio: guadagno in continua, che può essere spesso
anche assai minore; offset, che può essere a volte significativamente maggiore; CMRR; level shift
accurato; ecc.
Si tratta quasi esclusivamente di amplificatori a transconduttanza (OTA) in quanto destinati
a pilotare carichi capacitivi e cioè capacità (ad esempio sistemi a capacità commutate) o altre
strutture CMOS.
Le categorie più utilizzate sono semplici amplificatori a transconduttanza con uscita single
ended e amplificatori completamente differenziali, cioè con uscita differenziale.
Essendo tali strutture condizionate, per quanto riguarda l’alimentazione, dal sistema digitale
in cui sono inserite esse sono prevalentemente a singola alimentazione, anche se possono darsi casi
di doppia alimentazione. Per lo stesso motivo è inoltre di particolare interesse il caso di basse
tensioni di alimentazione, dell’ordine di 3 V (3,3 V) o inferiori.
1
GENERALITA’
1.2 MOSFET A CONFRONTO CON BJT
BJT
Funzione di trasferimento
esponenziale
I C I S eVBE /VT (1 VCE )
Cattiva
Transconduttanza di piccolo segnale
complementarità
I
gm C
proporzionale alla corrente di lavoro
nella tecnologia
VT
base
Conduttanza di collettore (“di uscita”) di piccolo segnale
circa proporzionale alla corrente di lavoro
1
I
VA
I
go
IC C
IC C
ro 1 VCE
VA VA VCE
VA
1
VA
Fattore di guadagno, in continua, (guadagno a vuoto) dell’ordine delle migliaia
(in genere assai maggiore del guadagno sotto carico)
indipendente dalla corrente di lavoro e dalla fondamentale caratteristica
geometrica del dispositivo controllabile in fase di progetto (area di emettitore)
g
1 VCE VA VCE VA
A g m ro m
go
VT
VT
VT
Tensione termica
kT
k=1,38 10-23 J/K costante di Boltzmann
VT
q
q=1,6 10-19 C carica dell’elettrone
per T=300 K
VT=26 mV
VA tensione di Early dell’ordine del centinaio di volt
MOS
Buona
complementarità
VGS Vt
VDS VGS Vt
funzione di trasferimento quadratica:
1
W
W
I D k (VGS Vt )2 (1 VDS )
k Cox
k'
2
L
L
Regione ohmica:
VGS Vt
VDS VGS Vt
funzione di trasferimento:
W
1
I D 2k ' (VGS Vt VDS )VDS
L
2
quasi lineare per
VDS VGS Vt
Regione di saturazione:
Transconduttanza di piccolo segnale.
Proporzionale alla radice della corrente di lavoro o alla corrente di lavoro a
seconda del parametro di controllo utilizzato (rapporto di forma o tensione di
overdrive)
W
ID
gm 2k (VGS VT )(1 VDS ) 2 k ' I D
1 VDS
V
L
GS V
2
2
AMPLIFICATORI CMOS
Conduttanza di collettore (“di uscita”) di piccolo segnale
circa proporzionale alla corrente di lavoro
I
VA
I
1
go
ID D
ID D
ro 1 VDS
VA VA VDS
VA
tensione di Early VA dell’ordine delle decine di volt; cresce al crescere del
drogaggio del substrato e di L
dX L
1
dVDS
Leff L X L
VA
Leff
XL lunghezza di modulazione del canale
Fattore di guadagno (guadagno a vuoto, in continua) compreso tra le decine e
le centinaia
inversamente proporzionale alla radice della corrente di lavoro
proporzionale alla radice del prodotto WL (dimensioni del dispositivo)
Uno scaling a campo costante, cioè variando proporzionalmente allo stesso
modo le dimensioni del dispositivo e le tensioni applicate non varia . Uno
scaling a tensione costante, cioè variando solo le dimensioni del dispositivo,
varia .
W 1 1 VDS
VA
1
A g m ro 2 k '
VGS Vt
V V
L ID
GS t
2
2
1
1
L
1
A 2 k ' WL
dX
V
V
dX
ID
L
GS
t
L
dVDS
dVDS
2
Effetto bulk
Tensione di soglia in funzione della tensione VS (source-bulk) per MOS a
canale n e a canale p rispettivamente
2
Vt Vt 0
2 VSB 2
Vt Vt 0
2 VSB
2 SI qN sub
Cox
kT N sub
ln
q
ni
Transconduttanza di bulk (canale n)
1
gm
gmb
2 2 VSB
Controllo della corrente di drain in regime di piccolo segnale
id g m vgs go vds g mbvsb
L’effetto body si riduce al diminuire del drogaggio Nsub del substrato, ma cresce il parametro
di modulazione della lunghezza di canale e quindi si riduce il guadagno massimo ottenibile.
Inoltre una eccessiva riduzione della concentrazione di ioni droganti (circa < 1013 cm-3) un NMOS
può comportarsi come un dispositivo a svuotamento e cioè come un JFET.
Nel caso di debole inversione (funzionamento sottosoglia, cioè per tensioni di overdrive inferiori
a qualche decina di mV per un NMOS), la caratteristica di trasferimento diviene esponenziale come
in un transistore bipolare:
W V / nV
V /V
I D I Dx e GS T 1 e DS T
L
dove IDx dipende dal processo tecnologico e n è compreso tra 1 e 2. Le correnti ottenibili sono
molto piccole essendo IDx dell’ordine di qualche decina di nA; il dispositivo risulta quindi dotato di
fT molto bassa. Può essere usato in applicazioni a potenza molto bassa e a frequenze modeste.
3
TECNICHE DI POLARIZZAZIONE NEGLI AMPLIFICATORI CMOS
Cap. 2
TECNICHE DI POLARIZZAZIONE NEGLI
AMPLIFICATORI CMOS
2.1 CIRCUITI DI POLARIZZAZIONE
2.1.1 CIRCUITI DIRETTAMENTE DERIVATI DALLE TENSIONI DI ALIMENTAZIONE.
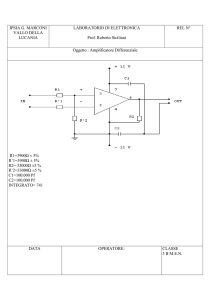
Nella figura 2.1 è rappresentato lo schema circuitale di un amplificatore a transconduttanza
(OTA) particolarmente semplice. Si tratta di una struttura monostadio, differenziale, con carico a
specchio, destinata a pilotare direttamente un carico capacitivo e quindi di una soluzione applicabile
on-chip ogni qual volta non siano richieste caratteristiche migliori, quali guadagno e slew rate più
elevati.
Tale soluzione verrà discussa dettagliatamente più avanti.
VDD
IN
M3
M4
I1
I1
M2
M1
OUT
IN
CL
2I1
Vbias
M5
VSS
Figura 2.1
Semplice amplificatore a transconduttanza CMOS a singolo stadio
Si noti che, ovviamente, è richiesto un circuito di polarizzazione atto a fissare la corrente di
lavoro dello stadio, circuito che non è rappresentato nella figura, mentre è indicata la tensione di
polarizzazione Vbias da esso fornita.
Nell’ambito della tecnologia CMOS spesso le polarizzazioni si possono considerare in
termini di tensioni anziché direttamente di correnti e i circuiti di polarizzazione possono essere
considerati, spesso indifferentemente, quali generatori di tensione o di corrente. Con le strutture
CMOS è infatti possibile generare facilmente delle tensioni ricorrendo solamente ai transistori senza
utilizzare necessariamente resistori
Nella figura 2.2 è rappresentato un singolo transistore MOS nella connessione bipolare detta
“a diodo”, che genera ai suoi capi una tensione
1
I
Vov tensione di overdrive
VDS VGS Vt
Vt Vov
k' W
L
4
AMPLIFICATORI CMOS
(si è trascurato l’effetto Early, in questo caso di peso assai modesto, e si è considerato
assente l’effetto body)
E’ importante osservare che il transistore si trova sempre a lavorare in regione di saturazione
essendo rispettata la relazione VDS>VGS-Vt.
La relazione precedente può essere scritta nella forma equivalente
VDS Vt V
dove V risulta controllabile attraverso il rapporto di forma
I
M1
VDS= VGS = Vt +
1
k'
I
W/L
Figura 2.2
MOS in connessione a diodo
Quindi una disposizione in serie di MOS opportunamente dimensionati consente di ottenere
un partitore di tensione a partire da una tensione di alimentazione.
VDD
Mn+1
I
Vn
Mn
I
V2
M2
I
V1
M1
Figura 2.3
5
TECNICHE DI POLARIZZAZIONE NEGLI AMPLIFICATORI CMOS
Partitore di tensione MOS
Un esempio generalizzato è riportato nella figura 2.3, dove si mette anche in evidenza come
strutture di questo tipo siano fortemente influenzate dall’effetto body: pur utilizzando transistori
nominalmente identici essi risultano caratterizzati da tensioni di soglia effettive diverse.
La relazione caratterizzante il partitore si basa ovviamente sulla disposizione in serie e
quindi sulla condizione di eguaglianza delle correnti che percorrono i MOS:
2
2
2
W
W
W
k ' V1 Vt1 k ' V2 V1 Vt 2 k ' VDD Vn Vtn 1
L 1
L 2
L n1
Nota la sequenza V1 – Vn che si vuole realizzare e fissata la corrente di lavoro (in base a
criteri quali dissipazione e occupazione di area), si determinano le varie tensioni di soglia e quindi i
rapporti di forma necessari. La dipendenza delle tensioni di soglia di tutti i transistori al di sopra
del primo dall’effetto body aggiunge notevole dispersione nel risultato.
Ovviamente la stessa struttura può essere realizzata ricorrendo a dispositivi a canale P e,
parimenti, tutte le strutture mostrate nel seguito possono essere tradotte nella loro forma
complementare.
Le strutture del tipo considerato, utilizzate per produrre tensioni di polarizzazione, sono
realizzabili con numerose varianti, soprattutto in dipendenza dalle configurazioni degli amplificatori
a cui devono essere associate. Nella figura 2.4 è rappresentata una soluzione atta a produrre una
tensione determinata in base alle relazioni
2
2
W
W
I ref k N' Vbias VtN k P' VDD Vbias VtP
L N
L P
Vbias VSS VtN
1
k N'
I ref
W
L
N
VDD
M2
I ref
Vbias
M1
VSS
Figura 2.4
Altro esempio di partitore di tensione MOS
Questo semplice circuito di generazione di una tensione di polarizzazione può essere
associato con vantaggio ad esempio all’amplificatore della figura 2.1. Tale associazione è riportata
nella figura 2.5 che quindi mostra una struttura elementare OTA completa.
6
AMPLIFICATORI CMOS
I transistori M5 e M6 verranno necessariamente dimensionati in base alla condizione
W
L 5 2 I1
W
I ref
L 6
e, nel caso di buon matching dei parametri tecnologici di M6 e M5 (tra cui anche , peraltro
solitamente caratterizzato da dispersione non trascurabile)
VDS 5 VDS 6 VGS 6 VGS 5
Quindi M5 rimane in saturazione anche al variare (entro limiti ragionevoli) delle tensioni di
alimentazione e le condizioni di lavoro del circuito risultano sostanzialmente stabili anche se
correnti e tensioni sono sensibili alle tensioni di alimentazione. Inoltre l’effetto Early non
interviene, almeno in prima approssimazione, nel dimensionamento di M5 e M6.
VDD
M7
Iref
M3
M4
I1
I1
M1
IN
M2
OUT
IN
2I1
M6
V bias
M5
VSS
Figura 2.5
Esempio di polarizzazione di un OTA tramite un partitore di tensione MOS
Nel circuito considerato, se realizzato in p-well, non interviene l’effetto body. Il circuito di
polarizzazione considerato è peraltro utilizzabile senza dover ricorrere a transistori di dimensioni
eccessive (M7, la cui VGS è pari alla totale tensione di alimentazione -VGS5) purché le tensioni di
alimentazione non siano troppo elevate e può quindi presentare problemi di dimensionamento.
Alcune soluzioni circuitali per realizzare generatori di tensioni di polarizzazione non
escludono l’uso di veri e propri resistori.2.1 Un esempio è mostrato nella figura 2.6.
2. 1
In tecnologia CMOS si possono realizzare resistori per diffusione, in polisilicio e in well. Resistori diffusi si ottengono
utilizzando le diffusioni utilizzate per realizzare le regioni di source e di drain; si ottengono così resistori con proprietà simili a
quelle dei resistori in tecnologia bipolare, ma di basso valore considerata la bassa resistenza di strato (qualche decina di
/quadro). Resistori in polisilicio si possono derivare dallo strato utilizzato nelle tecnologie con gate in polisilicio e anche in
questo caso la resistenza di strato risulta bassa (qualche decina di /quadro) e piuttosto dispersa. Le regioni di well possono essere
utilizzate per realizzare resistori; la resistenza di strato risulta assai elevata, ma è caratterizzata da forte dispersione, elevato
coefficiente di temperatura e spiccata dipendenza dalla tensione.
7
TECNICHE DI POLARIZZAZIONE NEGLI AMPLIFICATORI CMOS
Anche in questo caso ambedue i dispositivi utilizzati si trovano necessariamente in
saturazione e non vi è effetto body. Ovviamente
V1 VGS1
V2 VDD VGS 2
e in virtù della disposizione in serie si può scrivere la relazione
V V
2
2
W
W
I ref k N' V1 VtN 1 NV1 k P' V2 VtP 1 PV2 2 1
R
L 1
L 2
Noti i valori V1 e V2 desiderati si fissa un valore ragionevole di Iref (sostanzialmente in base
a considerazioni di dissipazione e di occupazione di area) e si deducono i valori di W/L dei
dispositivi e di R, utilizzando eventualmente una procedura “cut and trial”.
VDD
M2
V2
Iref
R
V1
M1
VSS
Figura 2.6
Altro esempio di partitore di tensione MOS utilizzante un resistore
Tutte le strutture sinora considerate producono riferimenti di polarizzazione più o meno
fortemente dipendenti dalla tensione di alimentazione. Gli amplificatori on-chip sono destinati,
salvo casi molto particolari, ad operare con tensioni di alimentazione nominalmente prefissate, ma
la reiezione dei disturbi associati alle alimentazioni (PSR) richiede in primo luogo che tali disturbi
non possano sensibilmente alterare, in transitorio,le condizioni di polarizzazione; inoltre, in caso di
dispersione non trascurabile delle tensioni di alimentazione, si richiede spesso una buona
riproducibilità e stabilità delle condizioni di polarizzazione. E’ quindi importante poter ricorrere a
circuiti di polarizzazione che forniscano tensioni e correnti il più possibile indipendenti dalle
alimentazioni utilizzate.
2.1.2 CIRCUITI CON PICCOLA DIPENDENZA DALLE TENSIONI DI
ALIMENTAZIONE.
Una particolare categoria di circuiti di polarizzazione, generatori di corrente e/o di tensione
è costituita dalle strutture cosiddette “autoalimentate” il cui funzionamento, come è noto, si basa
sulla presenza di una retroazione positiva interna che consente lo stabilirsi a regime di una
condizione di polarizzazione in linea di principio indipendente dalle tensioni di alimentazione
utilizzate. La corrente di lavoro viene prodotta utilizzando un opportuno riferimento di tensione
In genere si cerca peraltro di evitare l’uso di resistori veri e propri in quanto la struttura MOS può fungere da transistore (elemento
attivo), da condensatore e, in regione ohmica, da resistore. Un MOS polarizzato in regione ohmica consente di ottenere resistori
con resistenza controllabile tramite la polarizzazione gate-source e di valore anche elevato, ma è caratterizzato da scarsa linearità.
8
AMPLIFICATORI CMOS
interno: in genere si tratta della VGS di un MOS,oppure della VBE di un BJT oppure della VBE di
una coppia di BJT (cioè della tensione termica VT).
Nella figura 2.7 è riportato un circuito che utilizza la VGS di un MOS per produrre la
corrente di polarizzazione tramite un resistore di opportuno valore.
I transistori M1 e M2 costituiscono uno specchio che impone un determinato rapporto di
correnti nei due rami, ad esempio 1:
I bias I ref
I transistori M3 e M4 possono essere accoppiati in modo da avere la medesima VGS, ad
esempio, nel caso di fattore di specchio M1, M2 unitario, imponendo
W W
L 3 L 4
In questa maniera si impone al resistore R la tensione VGS del transistore M5 e si ottiene
quindi la corrente
I ref
Vt
' W
k
P
V
L5
I bias GS 5
R
R
VDD
M5
R
Iref
Ibias
M3
M4
Ibias
M6
M1
M2
R I bias = VGS= Vt +
I ref = Ibias
1
k'
Iref
W/L
Figura 2.7
Circuito di polarizzazione autoalimentato utilizzante come riferimento la tensione VGS di un MOS
Tale corrente viene prelevata tramite il transistore M6 pilotato da M2.
Se nella relazione precedente, lavorando a bassa corrente e dimensionando il transistore M5
con W/L grande, si rende trascurabile rispetto a Vt il termine sotto radice (cioè la tensione di
overdrive), si ottiene un circuito riferito alla tensione di soglia. Ciò è peraltro possibile solamente in
9
TECNICHE DI POLARIZZAZIONE NEGLI AMPLIFICATORI CMOS
prima approssimazione in quanto una diminuzione eccessiva della tensione di overdrive porterebbe
M5 sottosoglia.
Le relazioni precedenti – uguaglianza delle correnti imposta dallo specchio e legame
quadratico tra le correnti stesse determinato dalla conversione della tensione VGS5 – evidenziano
l’intervento di una retroazione positiva (non divergente) e mostrano che il sistema è caratterizzato
da due possibili punti di lavoro di cui il primo corrispondente a Ibias=0 instabile in linea di principio,
ma solitamente non di fatto. Infatti in fase di avvio (applicazione dell’alimentazione) il guadagno
interno della struttura è troppo piccolo, causa lo stato di non conduzione o insufficiente
polarizzazione dei dispositivi, e non consente di raggiungere il punto di lavoro corrispondente a Ibias
diverso da zero. E’ dunque a volte necessario un circuito di “startup” che conduca inizialmente il
circuito a raggiungere la condizione stabile di regime, ma risulti escluso in tale condizione.
Nell’analisi è stato trascurato l’effetto Early che istituisce un “collegamento diretto” con la
tensione di alimentazione e quindi introduce una certa dipendenza dall’alimentazione stessa della
corrente prodotta.
Il circuito soffre inoltre di dipendenza dalla temperatura spesso non trascurabile. Il
coefficiente di temperatura della corrente prodotta si può esprimere come
1 I bias
1 VGS 5 1 R
T
I bias T
VGS 5 T
R T
e, dato che il coefficiente di temperatura di VGS è negativo (compreso tipicamente tra -1 e -2
mV/°C) mentre quello del resistore è solitamente positivo2.2, di fatto i due termini non si possono
compensare, ma si sommano.
Del circuito riportato nella figura 2.7 sono possibili diverse varianti, ad esempio quella
riportata nella figura 2.8
VDD
R
M3
M4
Ibias
Iref
Ibias
M6
M1
M2
Figura 2.8
Variante del circuito della figura 2.7
2.2
Possono avere coefficiente di temperatura negativo resistori ad impiantazione ionica o a film sottile.
10
AMPLIFICATORI CMOS
Lo specchio M1, M2 impone anche in questo caso un certo rapporto, ad esempio 1, tra le
correnti nei due rami e lo specchio Widlar M3, M4, R legge la tensione VGS3 in termini di corrente
attraverso il convertitore resistivo R. La struttura si comporta come la precedente, ma il matching
tra M1 e M2 è peggiorato in quanto la caduta di tensione ai capi dei due transistori è diversa e
quindi la relazione tra le correnti nei due rami imposta dallo specchio risulta influenzata dall’effetto
Early e maggiormente dispersa.
Come riferimento di tensione interno al circuito autoalimentato può essere utilizzata la
caduta ai capi della giunzione base-emettitore di un transistore bipolare.2.3
VDD
J1
R
Iref
Ibias
M3
M4
Ibias
M5
M1
M2
R I bias = VBE =
I
kT
ln ref
IS
q
I ref = Ibias
Figura 2.9
Circuito di polarizzazione autoalimentato utilizzante come riferimento la tensione VBE di un BJT
Il circuito si comporta come quello della figura 2.7, ma la corrente risulta proporzionale alla
VBE del transistore bipolare J1
I ref
V
V
I bias BE1 T ln
R
R I S1
2 .3
Nell’ambito della normale tecnologia CMOS possono essere realizzati transistori bipolari verticali sfruttando uno well, il
substrato e la giunzione tra la diffusione di source (o di drain) o lo well: a partire da uno p-well si ottiene un transistore n-p-n; a
partire da uno n-well si ottiene un transistore p-n-p. Il substrato costituisce il collettore che quindi risulta sempre collegato a una
delle alimentazioni (l’alimentazione negativa nel caso di substrato p e quindi di transistore p-n-p; l’alimentazione positiva nel caso
di substrato n e quindi di transistore n-p-n); la base è costituita dallo well, l’emettitore dalla diffusione source/drain. Il transistore
si comporta quindi come un p-n-p di substrato della tecnologia bipolare di base: buona capacità di corrente, basso guadagno,
cattiva risposta in frequenza.
Naturalmente tecnologie CMOS più avanzate sono in grado di produrre BJT di entrambe le polarità senza utilizzare il substrato
come collettore e quindi fornendo dispositivi bipolari liberamente utilizzabili. Si tratta delle tecnologie BiCMOS. I transistori
bipolari sono realizzati in un processo a bassa tensione con drogaggio di collettore un ordine di grandezza più elevato che nei
processi bipolari ad alta tensione, isolamento dielettrico, dimensioni, soprattutto verticali, assai ridotte, impiantazione ionica,
caratteristiche tutte che bene si sposano con quelle di un processo CMOS avanzato.
11
TECNICHE DI POLARIZZAZIONE NEGLI AMPLIFICATORI CMOS
Anche dal punto di vista della dipendenza dalla temperatura il comportamento risulta del
tutto analogo a quello del circuito in cui viene utilizzata la VGS di un MOS: il coefficiente di
temperatura infatti è dato da
1 I bias
1 VBE1 1 R
T
I bias T
VBE1 T
R T
e, dato che il coefficiente di temperatura di VGS è negativo (attorno a -2 mV/°C) mentre
quello del resistore è solitamente positivo, di fatto i due termini si sommano.
Una soluzione circuitale che utilizza come riferimento di tensione la tensione termica
VT=kT/q è riportata nella figura 2.10.
VDD
J1
J2
mx
R
Iref
Ibias
M3
M4
Ibias
M5
M1
M2
R I bias = VBE =
kT
ln m
q
I ref = Ibias
Figura 2.10
Circuito di polarizzazione autoalimentato utilizzante come riferimento la tensione termica VT
La parte inferiore della struttura è identica in termini di architettura e dimensionamento a
quella dei circuiti delle figure 2.7 e 2.9 e quindi
I bias I ref
VGS 3 VGS 4
e
I transistori J1 e J2 confrontano le loro VBE ed, essendo l’area di emettitore di J2 pari a m
volte quella dell’emettitore di J1 si ottiene
VBE VBE1 VBE 2 VT ln m
e quindi
V ln m kT 1
I bias T
ln m
R
q R
Il coefficiente di temperatura è
1 I bias
1 VT 1 R 1 1 R
T
I bias T
VT T R T T R T
12
AMPLIFICATORI CMOS
I due coefficienti sono ora dello stesso segno (positivi) e quindi si sottraggono per cui una
scelta opportuna del tipo di resistore produce una corrente molto meno dipendente dalla temperatura
che non quella prodotta dai circuiti precedenti. In realtà la scelta del valore e della natura di R, in
connessione con la scelta di m, è spesso condizionata anche da un criterio di minimizzazione
dell’area occupata da R stesso, da J1 e da J2.
In tutti i circuiti del tipo di quelli esaminati le principali fonti di errore e dispersione sono
costituite da:
- l’imperfetto accoppiamento dei dispositivi; nel caso delle strutture considerate nelle figure
2.7, 2.9, 2.10 l’accoppiamento tra M1 e M2, e tra M3 e M4
- l’effetto Early che può influenzare la relazione tra le correnti nei due rami e che comunque,
come già notato, determina accoppiamento con l’alimentazione
- l’eventuale effetto body
Per quanto riguarda il primo punto, particolare cura deve essere usata per ottenere un buon
accoppiamento; dal punto di vista geometrico producono migliori risultati dispositivi di dimensioni
non troppo piccole ed è importante utilizzare opportune tecniche di layout (ad esempio disposizioni
a centroide comune).
L’effetto Early può essere sensibilmente ridotto utilizzando strutture cascode. Ad esempio il
circuito della figura 2.10 può essere modificato come nella figura 2.11, sostituendo i transistori M1,
M2, M3, M4 con le relative configurazioni cascode. Questa soluzione consente di ottenere una
VDD
J1
J2
mx
R
Iref
Ibias
M3 2
M4 2
M31
M4 1
Ibias
M5 2
M1 2
M22
M5 1
M11
M21
Figura 2.11
Il circuito della figura 2.10 modificato tramite l’introduzione di strutture cascode.
13
TECNICHE DI POLARIZZAZIONE NEGLI AMPLIFICATORI CMOS
dipendenza di Ibias dalla tensione di alimentazione molto piccola, ma presenta una dinamica
di uscita in tensione considerevolmente ridotta causa le ulteriori cadute di tensione introdotte dai
trasferitori di corrente e non è quindi utilizzabile in sistemi a bassa tensione di alimentazione (ad
esempio VDD=3,3 V). Inoltre l’aggiunta di dispositivi “floating” rispetto a well e substrato introduce
inevitabilmente effetto body.
2.1.3 GENERATORI DI CORRENTE
La più semplice realizzazione di un generatore di corrente pilotato a specchio è
rappresentata nella figura 2.12.
La relazione tra la corrente Ibias e la corrente di riferimento Iref, cioè il fattore di specchio, si
può ovviamente scrivere
W
I bias
L 1 1 VDS1
W
I ref
1 VDS 2
L 2
VDD
Iref
Ibias
M1
M2
Figura 2.12
Semplice generatore di corrente a specchio
La dinamica di tensione in uscita è determinata dal limite di saturazione Vsat del transistore
M2 e quindi, trascurando l’effetto Early
I bias
VDD Vout Vsat 2
Vov 2
' W
k
L 2
Il transistore M2 andrebbe quindi dimensionato in modo da ridurre il più possibile la sua
tensione di overdrive.
La resistenza di uscita è semplicemente ro, cioè quella di drain di un MOS e non risulta
quindi particolarmente elevata.
L’accoppiamento tra i transistori risulta evidentemente critico per ottenere buona precisione
e riproducibilità e l’effetto Early contribuisce negativamente da questo punto di vista in quanto in
generale la tensione ai capi dei due transistori risulta diversa.
La resistenza di uscita può essere aumentata utilizzando una struttura retroazionata o
configurazioni cascode. Il primo approccio conduce alla ben nota configurazione Wilson
14
AMPLIFICATORI CMOS
ampiamente utilizzata in tecnologia bipolare. Va peraltro notato che nel caso dei transistori bipolari
la struttura Wilson è utilizzata anche, e spesso, soprattutto per ridurre l’errore sistematico di
specchio connesso con la presenza delle correnti di base; non è ovviamente questo il caso in
tecnologia CMOS. Essendo lo specchio Wilson retroazionato la resistenza di uscita viene
modificata in termini del guadagno d’anello che, purché il fattore di guadagno A dei transistori sia
grande rispetto ad 1, in prima e buona approssimazione vale appunto A (si è fatta l’ipotesi che i
transistori abbiano tutti lo stesso rapporto di forma e che il generatore Iref non carichi
apprezzabilmente la struttura). Perciò la resistenza di uscita è sostanzialmente data da
rout gm ro ro3 Aro3
VDD
Iref
Ibias
M3
M1
M2
Figura 2.13
Specchio Wilson
Essendo A compreso tipicamente tra qualche decina e qualche centinaio la resistenza di
uscita risulta considerevolmente più elevata che nel caso dello specchio semplice.
Peraltro lo specchio Wilson soffre principalmente di due inconvenienti: la dinamica di uscita
risulta considerevolmente ridotta rispetto a quella dello specchio semplice e la precisione e
riproducibilità sono alquanto modeste in quanto i transistori M1 e M2 hanno diversa tensione ai
capi e gioca quindi l’effetto Early. Questi inconvenienti sono assai più gravi che in tecnologia
bipolare in quanto le cadute residue nei MOS (tensione di saturazione) sono significativamente
maggiori di quelle dei bipolari 2.4 e le tensioni di Early possono essere anche molto minori. Inoltre
le tensioni di alimentazione sono normalmente sensibilmente più basse.
Ovviamente il significato di “saturazione” è completamente diverso nei due casi. Qui e nel seguito con Vsat si indica
la tensione che nominalmente separa la regione ohmica da quella di saturazione, cioè la tensione minima che deve
essere presente ai capi del dispositivo MOS perché esso operi nella regione di saturazione. Tale tensione coincide con la
tensione di overdrive Vov=VGS-Vt e costituisce un limite da cui è in pratica necessario discostarsi alquanto per garantire
il funzionamento in saturazione: infatti la transizione tra le due regioni non è netto, ma piuttosto graduale. Per canale
“ultracorto” l’effetto della saturazione della velocità dei portatori comporta uno scostamento dalla caratteristica
quadratica che tende ad essere linearizzata.
2.4
15
TECNICHE DI POLARIZZAZIONE NEGLI AMPLIFICATORI CMOS
La dinamica della tensione di uscita è limitata (inferiormente, nella figura) dall’entrata in
regione ohmica di M3 per cui la caduta residua risulta data da
VGS 2 Vsat 3
cioè, nel caso che i transistori abbiano tutti lo stesso rapporto di forma
2Vsat Vt
da confrontare con quella dello specchio semplice pari soltanto a Vsat. Ad esempio per una
tensione di overdrive di 180 mV e Vt =0,9 V nello specchio semplice la caduta residua risulta pari a
0,18 V, mentre nello specchio Wilson è 1,26 V e quindi scarsamente compatibile con basse
alimentazioni.
Si noti che una buona dinamica di tensione in uscita è importante soprattutto nel caso che i
generatori di corrente vengano utilizzati come carichi attivi.
Il peso dell’effetto Early nel condizionare l’accoppiamenti tra i transistori M1 e M2 può
essere ridotto aggiungendo alla struttura un transistore di level shift per simmetrizzarla, come
mostrato nella figura 2.14.
In ogni caso deve essere attentamente curato l’accoppiamento tra gli elementi attivi, in
particolare tra M1 e M2, M3 e M4
VDD
Iref
Ibias
M3
M4
M1
M2
Figura 2.14
Specchio Wilson simmetrizzato
Una struttura molto usata in tecnologia CMOS è quella del generatore di corrente cascode
che può essere derivato direttamente dallo specchio semplice M1-M2 aggiungendo due transistori
M3 e M4 a costituire strutture cascode su ciascun ramo. La configurazione che così si ottiene è
rappresentata nella figura 2.15.
Tale configurazione è intrinsecamente simmetrica nel caso di buon accoppiamento delle
coppie M1-M2 e M3-M4, presenta una resistenza di uscita elevata - dello stesso ordine di quella
dello specchio Wilson e cioè Aro – ma è caratterizzata da una caduta residua in uscita anch’essa
pari a quella dello specchio Wilson 2Vsat+Vt.
16
AMPLIFICATORI CMOS
VDD
Iref
Ibias
M3
M4
M1
M2
Figura 2.15
Specchio cascode
L’andamento della corrente in funzione della tensione all’uscita dello specchio cascode è
mostrato nella figura 2.16. Nelle valutazione fatte e nella figura è stato trascurato l’effetto Early.
Ibias
M2 e M4 ambedue in saturazione
M2 in saturazione e M4 in regione ohmica
M2 e M4 ambedue in regione ohmica
2Vsat
2Vsat +Vt
Vout
Figura 2.16
Corrente in funzione della tensione all’uscita dello specchio cascode
E’ possibile ridurre tale caduta e quindi migliorare nettamente la dinamica di uscita del
circuito modificando in modo semplice la struttura tramite l’introduzione di una traslazione di
livello che costringa il transistore M2 ad avere ai suoi capi una tensione pari a Vsat invece che VGS.
La soluzione usualmente utilizzata è riportata nella figura 2.17.
Nella figura si riconoscono i transistori M1-M4 della configurazione cascode originaria. Tra
i transitori M3 e M4 è ora interposto il transistore M5 (alimentato dal transistore M6 e quindi in
17
TECNICHE DI POLARIZZAZIONE NEGLI AMPLIFICATORI CMOS
configurazione follower) che introduce una traslazione di livello pari alla sua VGS5. Tra il suo gate e
il drain del transistore M2 si ha quindi una caduta pari a
2VGS
e quindi per portare la tensione ai capi di M2 ad essere pari a
Vsat VGS Vt
è necessario portare il gate di M3 e M5 a
2VGS Vsat 3VGS Vt 3Vsat 2Vt
Dunque il transistore M3 deve essere dimensionato in modo che la sua tensione VGS3 sia pari
a
VGS 3 2VGS Vt 2Vsat Vt
cioè in modo che abbia una tensione di overdrive
VGS 3 Vt 2(VGS Vt )
doppia della tensione di overdrive degli altri transistori.
Ciò, considerata la relazione quadratica tra corrente e tensione di overdrive, si ottiene
riducendo il rapporto di forma di M3, rispetto a quello degli altri transistori, di un fattore 22=4.
VDD
Iref
1
4
M3
W/L
Iref
M5
3Vsat+2Vt
W/L
2Vsat+Vt
Ibias= Iref
M4
W/L
Vsat
M1
W/L
M2
Vsat+Vt
W/L
M6
W/L
Figura 2.17
Specchio cascode con dinamica di uscita migliorata
La struttura considerata riduce quindi considerevolmente la caduta residua in uscita in
quanto, rispetto alla struttura cascode precedente, cancella il contributo corrispondente a Vt, cioè il
contributo decisamente più alto, e presenta una dinamica limitata solamente da 2Vsat.2.5
Riprendendo l’esempio quantitativo considerato nel caso dello specchio Wilson, si passa da 1,26 V
a 0,36 V.
2.5
Con VGS e Vsat sono state indicate le tensioni,rispettivamente gate-source e di saturazione, dei dispositivi con
rapporto di forma pari a W/L
18
AMPLIFICATORI CMOS
La modifica introdotta ha peraltro reso asimmetrico lo specchio in quanto la caduta ai capi
di M3 è ora forzatamente diversa da quella ai capi di M4 per effetto della traslazione di livello
introdotta da M5, la differenza essendo pari a VGS; una differenza di VDS è stata introdotta anche per
la coppia di transistori M1-M2 e vale Vt. Ciò peggiora l’accoppiamento tra i transistori in quanto
interviene il diverso effetto Early.
E’ possibile realizzare una struttura, sempre del tipo cascode, che ripristina la simmetria pur
conservando una caduta residua in uscita contenuta ed eventualmente pari a quella del circuito della
figura 2.17. Si tratta di portare ambedue i transistori M1 e M2 ad avere ai capi Vsat.
La nuova struttura è rappresentata nella figura 2.18 e nella figura 2.19 in una forma
“generalizzata” che evidenzia, attraverso il parametro di dimensionamento relativo m (scaling del
rapporto di forma), l’approccio utilizzato.
Facciamo dapprima riferimento alla figura 2.18.
Anche qui si riconoscono i transistori M1-M4 della configurazione cascode originaria alla
quale si aggiunge il transistore M5 e nella quale si modifica la connessione a diodo di M1.
VDD
Iref
Iref
Ibias
2Vsat+Vt
M4
M3
W/L
W/L
Vsat
1
4
M5
M1
W/L
W/L
Vsat+Vt
Vsat
M2
W/L
Figura 2.18
Specchio cascode con dinamica di uscita migliorata e simmetrizzato
Affinché sia M1 che M2 risultino polarizzati con tensione ai capi VDS pari a Vsat i gate di
M3 e M4 devono essere posti al livello
Vsat VGS 2Vsat Vt
A ciò provvede il transistore M5 opportunamente dimensionato.
Deve essere
VGS 5 VDS 5 2Vsat Vt 2VGS Vt
e cioè
VGS 5 Vt 2(VGS Vt )
Ciò, considerata la relazione quadratica tra corrente e tensione di overdrive, si ottiene
riducendo il rapporto di forma di M5, rispetto a quello degli altri transistori, di un fattore 22=4.
19
TECNICHE DI POLARIZZAZIONE NEGLI AMPLIFICATORI CMOS
Evidentemente la connessione originaria, a diodo, dei singoli transistori M1 e M3 non risulta
compatibile con il voler porre M1 al limite di saturazione e con il dimensionamento di M5 rispetto
agli altri transistori: la connessione va cambiata e l’unica soluzione semplice adottabile è quella
riportata nella figura.
Nella successiva figura 2.19 si aggiunge un grado di flessibilità in base alla considerazione
che non è a rigore necessario che tutti i quattro transistori M1-M4 abbiano il medesimo rapporto di
forma: ciò è necessario separatamente per le coppie M1-M2 e M3-M4, anche se, dal punto di vista
di un buon matching generale, avere dispositivi uguali costituisce un vantaggio. Introducendo un
fattore di scaling m, i transistori M3 e M4 potrebbero essere dimensionati sulla base di m2 e cioè
con un fattore di forma
1 W
m2 L
dove m è un numero intero uguale o maggiore di 1
E’ immediato mostrare che, in questo caso, per ottenere il risultato desiderato, cioè sia M1
che M2 polarizzati al limite di saturazione, è necessario dimensionare M5 in base a uno scaling
(1+m)2. 2.6
VDD
Iref
Iref
Ibias
(m+1)Vsat+Vt
M4
1 M3
W/L
2
m
Vsat
1
(m+1)2
M5
M1
W/L
W/L
1
2
m
Vsat+Vt
W/L
Vsat
M2
W/L
Figura 2.19
Specchio cascode della figura precedente con dimensionamento “generalizzato”
Il limite inferiore della tensione di uscita si raggiunge quando ai capi di M4 si ha
VDS 4 mVsat
e quindi la caduta residua in uscita risulta pari a
2.6
L’elevazione al quadrato discende, come già fatto notare, dalla dipendenza quadratica della corrente dalla tensione di
overdrive.
20
AMPLIFICATORI CMOS
(m 1)Vsat
E’ evidente che da questo punto di vista è conveniente porre m=1. Inoltre m di valore
sensibilmente discosto da 1 condurrebbe a difficoltà di dimensionamento causa problemi di
occupazione di area e di accoppiamento.
Nella trattazione precedente relativa ai generatori rappresentati nelle figure 2.15 – 2.19 sono
state considerate valide alcune approssimazioni che in un progetto reale non possono essere
rigorosamente mantenute. Ad esempio è sempre stato trascurato l’effetto body, in particolare per
quanto riguarda i transistori “floating” M3 e M4. Inoltre la transizione tra la regione ohmica e
quella di saturazione non è netta, ma piuttosto graduale e quindi i transistori devono essere
polarizzati con una tensione ai capi maggiore della Vsat nominale, onde garantire buone
caratteristiche quali, ad esempio, la resistenza di uscita.
Il problema del buon accoppiamento tra più dispositivi è particolarmente grave in tecnologia
CMOS e i risultati ottenibili sono in generale inferiori a quelli raggiungibili in tecnologia bipolare;
ciò a causa del maggior numero di parametri che controllano il funzionamento di un MOS e del
fatto che alcuni di essi, come ad esempio la tensione di soglia, risultano piuttosto dispersi.
Consideriamo ad esempio il caso dello specchio semplice di corrente, riportato nuovamente
nella figura 2.19
Definiamo il valor medio e la deviazione della corrente, del fattore di forma e della tensione
di soglia
1
I I1 I 2
I I1 I 2
2
W 1 W W
W W W
L 2 L 1 L 2
L L 1 L 2
1
Vt Vt1 Vt 2
Vt Vt1 Vt 2
2
I1
I2
M1
M2
( W/L) 1
( W/L) 2
Figura 2.19
Accoppiamento degli elementi di uno specchio semplice
Utilizzando le espressioni precedenti entro la relazione caratteristica del MOS
W
I D k ' (VGS Vt ) 2 (1 VDS )
L
trascurando l’effetto di modulazione della lunghezza del canale nonché i termini di ordine
superiore si ottiene
W
W
V
V
I
t
L
L 2 t
W
VGS Vt
W
I
Vov
L
L
2
21
TECNICHE DI POLARIZZAZIONE NEGLI AMPLIFICATORI CMOS
Al posto delle deviazioni vanno poi introdotte le varianze o dispersioni statistiche e si ha la
somma di due termini di cui uno dipendente dal dimensionamento geometrico e l’altro dipendente
dalla dispersione della tensione di soglia e quindi di origine tecnologica. Il primo termine è
indipendente dalle condizioni di lavoro ed è controllato tecnologicamente dal sistema litografico e
in sede di realizzazione da opportune e accurate tecniche di layout. Il secondo termine dipende
inversamente dalla tensione di overdrive (come è del tutto intuitivo in quanto più piccola è tale
tensione e maggiore, nel controllo del dispositivo, diviene il peso della variazione della tensione di
soglia) e può quindi diventare dominante per piccoli valori di tale grandezza. Pertanto un buon
accoppiamento è favorito dall’utilizzo di dimensioni geometriche non troppo prossime al limite
inferiore imposto dalla tecnologia e da polarizzazioni corrispondenti a tensioni di overdrive non
troppo piccole. D’altro canto queste scelte progettuali influenzano negativamente caratteristiche e
parametri quali la risposta in frequenza, l’offset di tensione, le dinamiche di tensione, ecc. e le
soluzioni da adottare sono quindi, come sempre, il frutto di un compromesso.
22
AMPLIFICATORI CMOS
Cap. 3
AMPLIFICATORI CMOS A TRANSCONDUTTANZA
(OTA) “ON CHIP”
3.1 AMPLIFICATORI MONOSTADIO
La più semplice struttura di amplificatore CMOS differenziale a transconduttanza è quella
già mostrata nella figura 2.1 e riportata nuovamente nella figura 3.1.
Il guadagno differenziale è dato da
g mi
Ad g mi roi // rol
g oi g ol
dove
gmi transconduttanza dei transistori di ingresso
goi conduttanza di drain (di Early) dei transistori di ingresso
gol conduttanza di drain (di Early) dei transistori di carico
VDD
M3
M4
I
IN
I
M2
M1
OUT
IN
CL
2I
Vbias
M5
VSS
Figura 3.1
Semplice amplificatore a transconduttanza CMOS a singolo stadio
La resistenza di uscita è
1
g oi g ol
Introducendo la tensione di overdrive e il parametro della tecnologia, le espressioni
precedenti si possono scrivere
1
1
Ad gmi roi // rol
1 V V i l
2 GSi ti
1 1
rout
i l I
rout
23
AMPLIFICATORI CMOS OTA” ON CHIP”
La prima delle due mostra che il guadagno può essere controllato tramite la tensione di
overdrive dei transistori di ingresso e la seconda mostra che, fissata la corrente di lavoro, la
resistenza di uscita è, in prima approssimazione, determinata dalla tecnologia. Dal punto di vista
progettuale la tensione di overdrive viene controllata attraverso il dimensionamento geometrico dei
transistori di ingresso, cioè attraverso il rapporto di forma
1
I
VGSi Vti '
ki W
Li
Piccola tensione di overdrive, e quindi elevato guadagno, significa elevato rapporto di
forma, condizione questa che risulta in accordo con i requisiti di rumore che richiedono
transconduttanza degli elementi di ingresso sufficientemente elevata onde contenere il loro rumore
termico e ridurre il peso relativo del rumore introdotto dal carico. D’altro canto la tensione di
overdrive non può essere ridotta al di sotto di un certo valore pena l’instaurarsi del meccanismo di
funzionamento della conduzione sottosoglia. Si vedrà poi, più avanti, discutendo il comportamento
in frequenza, che, sino ad un valore massimo, il prodotto guadagno banda cresce in una struttura
come quella esaminata, al crescere del rapporto di forma dei transistori di ingresso.
In una seconda approssimazione si può anche notare che il parametro dipende dalla
lunghezza di canale e diminuisce al crescere di essa il che indurrebbe, in relazione al guadagno
ottenibile, a utilizzare dispositivi di ingresso a canale relativamente lungo, peraltro, a parità di W/L,
con aumento dell’occupazione d’area.
Va ricordato anche che l’aumento delle dimensioni dei dispositivi influisce negativamente
sulla loro risposta in frequenza, ma, entro certi limiti, non necessariamente su quella dell’intero
sistema.
La corrente di lavoro deve primariamente essere determinata con riferimento allo slew rate
(esterno) necessario per caricare su grande segnale, a velocità sufficiente, la capacità di carico che si
desidera pilotare. Essendo lo stadio evidentemente in classe A vale la relazione
2I
SRe
CL
e quindi
SR
I e CL
2
Il guadagno si può quindi esprimere nella forma
W
W
2 ki'
2 ki'
2
1
L i 1
L i 1
Ad g mi rout
VGSi Vti i l
i l
I
SReCL i l
2
Si noti che il guadagno, in prima e accettabile approssimazione, non dipende dal
dimensionamento geometrico dei dispositivi di carico, il quale interviene per quanto riguarda la
risposta in frequenza e il rumore, sia termico che 1/f.
A titolo di esempio consideriamo una capacità di carico di 10 pF e uno slew rate richiesto di
10 V/s
La tecnologia utilizzata sia p-well
Lmin = 3
3.1
i = 0,035
l = 0,05
3.1
In realtà il parametro da utilizzare sarebbe il coefficiente di modulazione della lunghezza di canale dXL/dVDS da cui
= (dXL/dVDS)/Leff e i valori di andrebbero correlati con la lunghezza di canale. Ciò da un lato costituisce un
elemento di un certo peso da utilizzare nel progetto, ma nell’esempio qui riportato complicherebbe notevolmente il
procedimento da utilizzare. D’altro canto nel seguito vengono ammesse altre semplificazioni (quale, ad esempio, il
trascurare l’effetto Early nei dispositivi di ingresso allo scopo di consentire un dimensionamentodi prima
approssimazioneella versione più utilizzata del programma di simulazione numerica Spice si considera
costante).
24
AMPLIFICATORI CMOS
ki’ = 30 A/V2
Vti = Vtl = 0,7 V
ki’ = 12 A/V2
Il guadagno è quindi dato da
23,5
VGSi Vti
ed è controllato dalla tensione di overdrive. Per ottenere circa 150 si deve porre
VGSi Vti 157mV
valore piuttosto basso e che sarebbe quindi favorevole anche per quanto riguarda l’offset di
tensione. Tale valore va confrontato con quello che corrisponde, nominalmente, alla transizione tra
sopra e sotto soglia. Tale transizione corrisponde a
kT
VGS Vt sub 2nVT 2n
q
W
I sub k ' 4n 2VT2
L
con n compreso tipicamente tra 1 e 1,5 in dipendenza dalla tecnologia (funzione crescente
del drogaggio del body); di fatto n è un parametro il cui valore deve essere desunto da una
caratterizzazione sperimentale dei dispositivi. Assumiamo ad esempio n=1,2
VGS Vt sub 62, 4mV
Un parametro significativo, in quanto rappresenta una misura dell’efficienza della
polarizzazione nel produrre transconduttanza, è il rapporto tra la transconduttanza e la corrente di
lavoro
k 'W
gm
2
L
2
I
I
VGS Vt
che risulta proporzionale all’inverso della tensione di overdrive.
Al limite di sottosoglia
1
gm
I sub nVT
e per n=1,2
gm
1
32 V
I sub
La transizione tra sotto e sopra soglia è molto graduale e, se si desidera un funzionamento
dei dispositivi descrivibile tramite le classiche relazioni sopra soglia, una regola semiempirica
richiede
gm
2
10
I
VGS Vt
VGS Vt 200mV
cioè
Nel caso di tensioni di alimentazione basse si utilizzano a volte valori più bassi della
tensione di overdrive, sino ad essere poco superiori a 100 mV, ma il dimensionamento, utilizzando
le relazioni caratteristiche del transistore sopra soglia, risulta poco accurato.
In ogni caso valori molto bassi non sono comunque consigliabili anche perché, a parità di
altre condizioni, la dispersione della tensione di soglia viene a giocare maggiormente nel
determinare l’accoppiamento tra i dispositivi di ingresso.
Poniamo quindi ad esempio
VGSi Vti 235mV
che conduce ad un guadagno
Ad 100
Ad
25
AMPLIFICATORI CMOS OTA” ON CHIP”
La corrente di lavoro risulta
1
SRe CL 50 A
2
Il fattore di forma dei dispositivi di ingresso risulta
I
W
'
30
2
L i
k V V
I
i
GSi
ti
valore abbastanza elevato, corrispondente a una transconduttanza
gmi 424 A
V
E’ evidente che la semplice struttura monostadio considerata è utilizzabile solamente
quando sono richiesti guadagni modesti e quando devono essere pilotate capacità di basso valore
con slew rate non troppo elevati. Nel caso di CL = 5 pF, SRe = 5 V/s e per un guadagno di circa
100 si otterrebbe
W
I 12,5 A
VGSi Vti 235mV
7,5
L i
Il dimensionamento dei dispositivi di carico può essere effettuato, in un primo approccio,
sulla base delle caratteristiche di rumore desiderate. Per ridurre il peso del rumore introdotto dal
carico rispetto a quello dovuto ai dispositivi di ingresso la transconduttanza dei transistori M3 e M4
deve risultare convenientemente inferiore a quella di M1 e M2
W
W
kl' ki'
L l
L i
'
W ki W
W
2, 4
'
L l kl L i
L i
e, per ottenere un peso relativo del rumore in regione bianca (termico) pari a circa il 50%
utilizzando le condizioni e il dimensionamento che conducono a un guadagno pari a 100 e a un
fattore di forma dei dispositivi di ingresso pari a 30
W
W
0,626 18,75
L l
L i
corrispondente a una transconduttanza
gml 212 A
V
(pari alla metà di quella dei dispositivi di ingresso, considerate le condizioni poste sul
rumore)
e a una tensione di overdrive
VGS 4 Vtl 471mV
valore elevato che influenza negativamente la dinamica di tensione in uscita; d’altro canto
un valore significativamente inferiore comporterebbe un peso importante del rumore dovuto al
carico.
Utilizzando per i transistori di ingresso la lunghezza di canale minima si ottiene
Li = 3
Wi = 90
Per i dispositivi di carico, onde ridurre il loro contributo al rumore flicker, conviene
utilizzare una lunghezza di canale maggiore, ad esempio 5 ; si ha allora
Ll = 5
Wl = 93,75
Il transistore M5 deve essere dimensionato in modo che la sua tensione di overdrive, che
interviene nel determinare il limite inferiore della dinamica del modo comune in ingresso, non sia
troppo elevata in relazione alla tensione di alimentazione utilizzata. Essendo esso polarizzato
tramite il doppio della corrente di lavoro degli altri transistori ciò comporta sicuramente un elevato
26
AMPLIFICATORI CMOS
rapporto di forma e quindi notevole occupazione di area ed elevata capacità parassita del nodo
corrispondente al suo drain e ai source dei transistori di ingresso. Ponendo ad esempio VGS-Vt = 250
mV si ottiene
W
53
L 5
e quindi
L5 = 3
W5 = 159
Si ottengono quindi dispositivi tutti di notevoli dimensioni, risultato questo connesso con
l’estrema semplicità della struttura che solo in queste condizioni può ragionevolmente soddisfare le
specifiche imposte. Per ottenere un dimensionamento più contenuto dal punto di vista geometrico
devono essere rilassate tali specifiche: in particolare capacità di carico e slew rate.
Il dimensionamento sinora progettato costituisce un primo approccio e va verificato e
ripreso per iterazioni successive anche in relazione ad altri aspetti di rilievo connessi con
caratteristiche desiderabili dell’amplificatore risultante: la tensione di polarizzazione in uscita (cioè
la traslazione di livello introdotta), la dinamica di uscita, la dinamica del modo comune in ingresso,
la risposta in frequenza e il margine di fase, l’offset di tensione riferito all’ingresso, la reiezione del
modo comune. Inoltre il dimensionamento deve essere considerato, per quanto riguarda alcuni
aspetti, anche tenendo conto del sistema di polarizzazione utilizzato. In una struttura così semplice
utilizzante un numero assai ridotto di elementi circuitali (transistori), l’utilizzo di una tecnologia
adeguata (nell’esempio considerato p-well) consente di evitare l’effetto body.
La dinamica di uscita dipende ovviamente dal livello di riferimento assunto per gli ingressi
(i gate di M1 e M2). Considerando tale livello pari a 0 V e facendo riferimento a una utilizzazione
retroazionata dell’amplificatore e assenza di modo comune, si può in prima approssimazione
ritenere nullo il segnale sui due ingressi. Quindi il limite inferiore della dinamica di uscita si ha
quando M2 raggiunge il limite della regione ohmica cioè Vsat2 = VGS2-Vti ai capi e perciò con il
drain a –Vti rispetto al gate; il limite superiore corrisponde all’entrata di M4 nella regione ohmica ,
cioè a VDD-Vsat4 ed è quindi limitato dalla tensione di overdrive di M4. Dunque l’escursione
dinamica massima nominale consentita risulta pari a
VDD Vsat 4 Vti
e nell’esempio risulta circa poco discosto da VDD. Va notato che la dinamica effettiva
utilizzabile va determinata in considerazione della massima distorsione accettabile, per cui è
necessario mantenere un certo margine rispetto al limite di transizione saturazione ↔ regione
ohmica.
La dinamica di uscita condiziona la scelta del livello di polarizzazione in tensione dei drain
di M2 e M4 che andrebbe posto al centro della dinamica. Ovviamente tale livello dipende
dall’effetto Early di cui quindi si deve tenere conto per tutti i transistori del sistema e di
conseguenza condiziona il dimensionamento dei vari dispositivi. Come già detto la procedura di
dimensionamento va ripresa e comunque si presenta notevolmente più complessa e difficilmente
effettuabile sulla carta. Anche il comportamento in frequenza e il conseguente margine di fase
devono essere tenuti in conto producendo ulteriore complessità nell’approccio progettuale e la
necessità di procedere comunque per iterazioni e quindi approssimazioni successive sfruttando
adeguate tecniche di simulazione numerica.
Per quanto riguarda la dinamica del modo comune in ingresso 3.2 evidentemente essa è
limitata inferiormente dal limite di saturazione Vsat5 di M5 pur rimanendo inalterata la VGS di M1 e
M2 ed è quindi, in valore assoluto
VSS Vsat 5 VGS 1 VSS Vsat 5 Vsat1 Vti
mentre è limitata superiormente dal limite di saturazione di M1 e M2 che si verifica quando
il drain di tali transistori scende sotto il gate di una tensione pari a quella di soglia
3.2
La dinamica del modo comune in ingresso si può definire come l’escursione del segnale di modo comune entro la
quale rimane sostanzialmente costante il guadagno di modo differenziale.
27
AMPLIFICATORI CMOS OTA” ON CHIP”
VDD VDG1 VGS 3 VDD Vsat 3 Vtl Vti
E’ evidente che la struttura considerata presenta una dinamica del modo comune in ingresso
asimmetrica: è cioè migliore quella positiva rispetto a quella negativa. Nell’esempio sopra riportato
lo scostamento dall’alimentazione negativa è pari a
1,185 V
mentre quello dall’alimentazione positiva è pari a
0,471 V
Tale asimmetria è ovviamente tanto più gravosa quanto più basse sono le tensioni di
alimentazione e risulta sostanzialmente inaccettabile quando la tensione totale di alimentazione
ammonta a pochi volt.
Ovviamente, a parità di altre condizioni, i risultati ottenuti si invertono nel caso della
struttura complementare rispetto a quella della figura 3.1, rappresentata nella figura 3.2.
VDD
M5
Vbias
2I
M1
IN
M2
I
IN
I
M3
M4
OUT
VSS
Figura 3.2
L’amplificatore della figura 3.1 nella versione n-well
In questo caso è favorita la dinamica negativa rispetto a quella positiva e ciò suggerisce una
soluzione di carattere generale e cioè l’utilizzo contemporaneo, cioè in parallelo, di ambedue le
strutture. Tale soluzione viene implementata in strutture più efficienti di quella particolarmente
semplice qui considerata e cioè strutture cascode (folded) o strutture a più stadi (due più un
eventuale stadio di uscita) oppure, più frequentemente in amplificatori completamente differenziali
che comportano una retroazione sul modo comune. E’ evidente che una elevata dinamica del modo
comune in ingresso è particolarmente importante quando l’amplificatore viene retroazionato nella
configurazione a guadagno unitario (buffer).
Si può infine notare che lo stadio considerato presenta potenzialmente migliori
caratteristiche di rumore nella regione 1/f , cioè a bassa frequenza, se realizzato nella versione nwell invece che p-well: ciò perché le attuali tecnologie producono dispositivi a canale p affetti da
minor rumore flicker che non i dispositivi a canale n. Peraltro in n-well le caratteristiche dei
dispositivi a canale n e a canale p differiscono maggiormente, e quindi è peggiore la
complementarità, in quanto il dispositivo n è intrinsecamente superiore a ragione della maggior
mobilità dei portatori e, in generale, i dispositivi realizzati nel substrato hanno migliori
caratteristiche di quelli realizzati in well.
28
AMPLIFICATORI CMOS
Tra le limitazioni della struttura sinora considerata evide in particolare il guadagno
decisamente modesto, tipicamente inferiore al centinaio o, al più, di poco superiore. Il guadagno è
ovviamente condizionato dal valore della capacità da pilotare in connessione con lo slew rate
richiesto. Esso risulta proporzionale all’inverso della radice del prodotto di tali grandezze:
1
Ad
SReCL
Una riduzione di tali specifiche non conduce a un sensibile aumento del guadagno anche se
accompagnata da un aumento (entro i limiti del possibile e comunque opinabile) del fattore di forma
dei dispositivi di ingresso.
Una soluzione alternativa per una struttura monostadio è quella di utilizzare una architettura
cascode, il che equivale a ridurre considerevolmente (tipicamente di diverse decine di volte) i valori
di , ottenendo così, a parità di altre condizioni guadagni superiori di circa due ordini di grandezza,
cioè nel campo delle migliaia.
VDD
Vbias2
M11
M7
M8
M5
M6
Vbias3
M3
M4
I
IN
OUT
I 10
I
M10
M2
M1
CL
IN
2I + I9
M9
Vbias1
VSS
Figura 3.3
Amplificatore monostadio cascode
La figura 3.3 mostra un amplificatore monostadio che utilizza in ingresso una
configurazione cascode e un carico attivo costituito da uno specchio Wilson simmetrizzato.
29
AMPLIFICATORI CMOS OTA” ON CHIP”
L’evidente svantaggio della soluzione considerata è costituito dalla utilizzazione di un
numero di dispositivi in serie doppio rispetto a quello della semplice struttura di partenza e quindi di
dinamica di uscita e di modo comune in ingresso assai ridotte.
La struttura di ingresso è polarizzata, per quanto riguarda la caduta di tensione relativa ai
transistori M1 (di ingresso) e M3 (trasferitore di corrente) e, corrispondentemente, M2 e M4,
tramite il transistore M10 che può essere dimensionato geometricamente e attraverso la corrente I10
che lo attraversa in modo da mantenere M1 e M2 al limite della saturazione al variare del livello di
modo comune in ingresso: i gate di M3, M4 risultano così agganciati al modo comune in ingresso.
Ricordiamo che lo specchio Wilson è intrinsecamente caratterizzato da una cattiva dinamica
di uscita; a questo è possibile rimediare sostituendolo con una struttura cascode come quella
riportata nella figura 2.17 o quella della figura 2.18.
VDD
Vbias2
M11
M7
M8
M5
M6
OUT
I 10
M3
M4
I
IN
I
M10
M2
M1
CL
IN
2I + I9
M9
Vbias1
VSS
Figura 3.4
Amplificatore monostadio cascode con migliori caratteristiche di dinamica
30
AMPLIFICATORI CMOS
Un possibile amplificatore così modificato (con carico del tipo di quello della figura 2.18) è
rappresentato nella figura 3.4. Malgrado siano stati introdotti significativi miglioramenti rispetto
alla struttura cascode più semplice, l’amplificatore risulta inadatto all’utilizzazione nel caso di
tensioni di alimentazione non sufficientemente elevate. Inoltre risultano necessarie tre tensioni di
polarizzazione.
Una soluzione più efficiente è quella riportata nella figura 3.5. Si tratta evidentemente
sempre di una struttura cascode con i relativi vantaggi, ma la tensione totale utilizzata risulta
significativamente inferiore a quella della struttura precedente. E’ peraltro necessario introdurre,
ovviamente, una addizionale coppia di generatori di corrente (M9 e M10 nella figura) il che, tra
l’altro comporta problemi di rumore. La rete di polarizzazione deve fornire 4 tensioni e, soprattutto
nel caso sia richiesta limitata dipendenza dalle tensioni di alimentazione, può risultare complessa, al
punto da richiedere un numero di componenti comparabile o addirittura superiore a quelli
dell’amplificatore vero e proprio.
DD
M9
M10
Vbias4
I1
IN
I2
I2
M3
M4
I1
M1
M2
IN
OUT
2I1
M5
M6
M7
M8
M11
Vbias1
Vbias3
Vbias2
CL
Figura 3.5
Amplificatore monostadio folded cascode
Nella figura 3.6 è riportato un amplificatore di questo tipo completo
A sinistra è rappresentata un struttura di polarizzazione autoalimentata basata su VBE,
costituita dai transistori M11-M14, J1-J2 e dal resistore R. Tale struttura fornisce direttamente la
tensione di gate del generatore M5 di polarizzazione degli elementi di ingresso del folded cascode e
alimenta a specchio i generatori M15 e M16 che a loro volta alimentano M17 e M18. La caduta ai
capi di M17 è utilizzata per polarizzare in tensione i gate dei trasferitori di corrente M3-M4. La
caduta ai capi di M18 polarizza i gate dei transistori M9-M10 che alimentano il carico del folded
cascode. M18 funge anche da specchio insieme a M19 il quale alimenta M20 che polarizza i gate
dei transistori M5 e M6 del cascode di carico. M20 è dimensionato in con (W/L)20 pari a ¼ dei
fattori di forma di M5-M8 in modo da portare M7 e M8 al limite di saturazione e minimizzare così
la caduta residua in uscita dovuta al carico.
31
M8
M7
M6
M5
M11
2I1
M1
M12
M14
M11
M13
R
J1
xm
I3
J2
Vbias
M15
M17
M16
M18
M20
M19
IN
VDD
I1
M9
I2
M2
I1
M10
I2
IN
M3
M4
OUT
CL
AMPLIFICATORI CMOS OTA” ON CHIP”
Figura 3.6
Amplificatore monostadio folded cascode completo
32
AMPLIFICATORI CMOS
3.2 AMPLIFICATORI A DUE STADI
La più semplice struttura di amplificatore CMOS differenziale a transconduttanza a due
stadi è quella riportata nella figura 3.7. L’amplificatore richiede l’introduzione di una rete di
compensazione in frequenza che nella figura non è inserita; le tecniche di compensazione verranno
descritte più avanti.
VDD
IN
M3
M4
I1
I1
M1
M2
M6
OUT
IN
I2
CL
2I1
M5
M7
Vbias
VSS
Figura 3.7
Semplice amplificatore a due stadi
Il secondo stadio è un semplice stadio source comune polarizzato in classe A,
configurazione atta a pilotare un carico capacitivo (pilotaggio di corrente).
Il guadagno differenziale, a bassa frequenza, dell’amplificatore è
gmi
gm 6
Ad 0 ;
goi + gol go 6 + go 7
e la resistenza di uscita
1
1
1
ro ;
=
go 6 + go 7
I2 l 6 + l 7
(il pedice i indica i dispositivi di ingresso, l quelli di carico, go indica la conduttanza di drain)
Nella struttura riportata nella figura 3.7 la dinamica di uscita e la capacità di corrente sono
limitate dalla configurazione del secondo stadio che opera in classe A; in particolare la corrente
erogabile in fase di source è limitata dalla polarizzazione del carico M7.
Una struttura più efficiente da questo punto di vista è riportata nella figura 3.8.
Il secondo stadio, costituito dai transistori M6-M9, è una struttura del tipo push-pull
polarizzata in classe A-B: i due transistori di uscita M8 e M9 sono dimensionati in modo da avere
polarizzazioni gate-source circa uguali e il più possibile limitate e quindi massimizzazione della
dinamica (simmetrica) di uscita. Il follower M6-M7 opera come traslatore di livello il che comporta
un dimensionamento di M6 tale da accordarsi con una elevata tensione di overdrive.
Il guadagno del secondo stadio è dato da
g + gm 9
(a parte il segno)
A2 ; m 8
go 8 + go 9
per cui il guadagno totale risulta dato da
33
AMPLIFICATORI CMOS OTA” ON CHIP”
gmi gm 8 + gm 9
goi + gol go 8 + go 9
Si noti che nel caso di ambedue le soluzioni presentate il guadagno in continua può essere
anche piuttosto elevato, da qualche migliaio a qualche decina di migliaia, in dipendenza peraltro
dalle caratteristiche tecnologiche dei dispositivi.
Le soluzioni considerate sono utilizzabili per il pilotaggio di capacità di valore relativamente
modesto, cioè capacità (integrate) sino a poche decine di pF. Capacità più elevate presenterebbero
problemi di compensazione in frequenza in quanto introdurrebbero un polo a frequenza anche
inferiore al prodotto guadagno-banda (si veda quanto discusso nel paragrafo 3.3).
A0 ;
VDD
M3
M4
M6
I1
IN
I1
M1
M8
M2
IN
OUT
M9
2I1
M5
CL
M7
Vbias
VSS
Figura 3.8
Amplificatore a due stadi con dinamica di uscita e capacità di corrente migliorate.
Qualora sia necessario ottenere guadagni particolarmente elevati si può, ovviamente,
ricorrere allo stesso approccio considerato nel caso degli amplificatori monostadio: l’utilizzazione
di configurazioni cascode, come mostrato nelle figure 3.9 e 3.10.
La figura 3.9 mostra una struttura derivata direttamente da quella della figura 3.8 tramite
l’utilizzazione di una architettura cascode “telescopica” per il primo stadio (si veda la figura 3.3).
Sono evidenti
- maggiore complessità
- ridotta dinamica in uscita dal primo stadio e quindi da tutto l’amplificatore
- ridotta dinamica del modo comune in ingresso anche se migliorata rispetto a quella di un
cascode privo del tracking introdotto dal transistore M10
L’amplificatore risulta quindi inadatto all’utilizzazione nel caso di tensioni di alimentazione
non sufficientemente elevate
Nella figura 3.10 è riportata una soluzione che consente di ottenere maggiore dinamica in
uscita. Essa è ovviamente derivata dalla struttura monostadio della figura 3.5 utilizzante la ben nota
configurazione folded cascode. Tale configurazione è quella più spesso utilizzata nell’ambito degli
amplificatori CMOS on-chip per ottenere elevati guadagni e buona risposta in frequenza
compatibilmente con le ridotte tensioni di alimentazione utilizzate.
34
AMPLIFICATORI CMOS
VDD
Vbias2
M11
M7
M8
M5
M6
I 10
M3
M14
M4
I
IN
M12
I
M10
M2
M1
IN
OUT
M15
2I + I10
CL
M13
M9
Vbias1
VSS
Figura 3.9
Amplificatore cascode a due stadi.
VDD
M9
M10
Vbias4
I1
IN
I2
I2
M3
M4
I1
M1
M2
IN
M14
Vbias2
2I1
M12
M5
OUT
M6
M15
Vbias3
M13
M11
Vbias1
M7
M8
Figura 3.10
Amplificatore folded cascode a due stadi.
35
CL
AMPLIFICATORI CMOS OTA” ON CHIP”
3.3 LA COMPENSAZIONE IN FREQUENZA
Gli esempi di amplificatori OTA mostrati nei paragrafi precedenti non riportano le reti
utilizzate per ottenere, ad anello chiuso, un margine di fase adeguato. Consideriamo dunque ora le
possibili, più semplici e più frequenti soluzioni del problema della compensazione in frequenza.
Iniziamo col considerare la più semplice struttura monostadio della figura 3.1 riportata
nuovamente nella figura 3.11. In questo caso non si tratta propriamente di un compensazione in
frequenza, ma piuttosto della semplice progettazione dal punto di vista della risposta in frequenza,
senza l’aggiunta di reti addizionali.
p-well
+VDD
M4
M3
M1
2
1
M2
IN -
IN +
M5
CL
2I 0
V bias
-VSS
Figura 3.11
Semplice amplificatore OTA monostadio. Sono evidenziati i nodi a cui sono associate le
singolarità principali.
Il nodo 2 a cui sono associate la capacità di carico CL e una capacità intrinseca (“parassita”)
C2 dà luogo al polo dominante.
Il nodo 1, cui è associata la capacità intrinseca C1, dà luogo a una coppia polo-zero
(“doppietto”) distanti una ottava, le cui pulsazioni sono
g
wp 2 = m l
polo
C1
g
wz = 2 m l
zero
C1
Il prodotto guadagno-banda è dato da
gmi
wT =
CL + C2
Diamo di seguito un esempio di dimensionamento dell’amplificatore che conduca ad
ottenere un margine di fase accettabile. Dall’esempio si deduce che, nel caso della tecnologia
CMOS, il prodotto guadagno-banda non è solitamente noto a priori, come invece accade
sostanzialmente in tecnologia BJT, ma è dipendente da parametri almeno in qualche misura
controllabili dal progettista.
Una condizione che è ragionevole porre in partenza appare quella relativa alla posizione del
doppietto che, per le note ragioni di settling time, è bene non si trovi al di sotto di T. Qualora il
36
AMPLIFICATORI CMOS
polo p2 del doppietto sia posto in coincidenza con T il margine di fase risulta di circa 70° e si può
quindi solitamente considerare sufficiente (>60°).
Possiamo quindi utilizzare la coppia di relazioni
gml
gmi
=
C1
CL + C2
gmi
wT =
CL + C2
a fronte peraltro di tre incognite relative alla polarizzazione e al dimensionamento
geometrico degli elementi della struttura:
æW ö
æW ö
çç ÷
çç ÷
I0
÷
÷
èL ÷
øi
èL ÷
øl
E’ dunque necessario introdurre un ulteriore vincolo operando una scelta per il
dimensionamento dei transistori di ingresso o ponendo una condizione relativa alla polarizzazione
degli stessi. Il guadagno dell’amplificatore è determinato dalla tensione di overdrive dei transistori
di ingresso Vovi
2
1
Ad
Vovi i l
Per ottenere un guadagno non troppo basso è quindi opportuno lavorare con bassa tensione
di overdrive (pur mantenendo i transistori sufficientemente sopra soglia). La condizione da
introdurre può perciò consistere nella scelta di Vovi e ne discende ovviamente una proporzionalità di
æW ö
T sia alla radice di I0 che a quella del fattore di forma dei transistori di ingresso çç ÷
.
÷
èL ÷
øi
æW ö
k 'I 0 çç ÷
èL ÷
øi
gmi
wT =
= 2
CL + C2
CL + C2
Tale andamento è riportato indicativamente nella figura 3.12 in un diagramma
bilogaritmico.
log T
I0
log ( W/ ) i
L
Figura 3.12
Andamento di T in funzione di I0 e del fattore di forma dei transistori di ingresso
37
AMPLIFICATORI CMOS OTA” ON CHIP”
Il risultato ottenuto indicherebbe una crescita indefinita di T in funzione del rapporto di
æW ö
forma çç ÷
dei dispositivi di ingresso, il che ovviamente non può avvenire. Il motivo è che le
÷
èL ÷
øi
considerazioni precedenti non hanno tenuto conto del fatto che le capacità parassite C1 e C2
considerate non sono indipendenti dal dimensionamento dei transistori.
Le capacità che abbiamo chiamato intrinseche o parassite si possono genericamente
esprimere nella forma
W
C n = C n 0 + gn
L
relazione questa semiempirica, in generale di buona validità; i parametri C0 e vengono forniti dalla
tecnologia.
In particolare C2 dipende dal fattore di forma dei transistori che fanno capo al nodo 2 e
cresce con esso. E’ evidente che ciò modifica l’andamento riportato nella figura 3.12 in quanto la
dipendenza crescente di C2 dal fattore di forma introduce un limite all’aumento di T con (W/L)i.
Indicando per comodità con x i rapporti di forma di interesse si ottengono le relazioni
xi
wT = a k N' I 0 '
C L + g (x i + x l )
C + g (x i + x l )
xl
= 02'
2x i
C L + g (x i + x l )
dove C L' = C L + C 02 e è un parametro che contiene il rapporto tra i k dei PMOS e degli NMOS
Per piccoli valori di xi (e quindi di xl)
x
wT ; a k N' I 0 ' i
CL
proporzionale a
I0 e a
æW
çç
èL
ö÷
÷
ø÷
i
log T
I0
I0
(W/ L)i'
log ( W/ ) i
L
Figura 3.13
Andamento di T in funzione di I0 e del fattore di forma dei transistori di ingresso avendo
tenuto conto della dipendenza delle capacità parassite dal fattore di forma.
38
AMPLIFICATORI CMOS
Per elevati valori di xi
wT =
a k N' I 0
1
c g xi
æW ö÷
çç ÷
è L ø÷i
Per ogni valore di I0 esiste quindi un massimo di T in funzione di (W/L)i e cioè un suo
valore ottimale. Eguagliando le espressioni limite precedentemente ottenute si ottiene il valore di
(W/L)i per cui T è massimo
'
æW ö
C L'
çç ÷
=
÷
÷
èL ø
cg
i
L’andamento di T in funzione di W/L è riportato nella figura 3.13 in un diagramma
bilogaritmico.
proporzionale a
I 0 e inversamente a
Consideriamo ora un semplice amplificatore OTA a due stadi come quello della figura 3.7.
E’ ora necessario introdurre una apposita rete di compensazione onde garantire nel sistema
retroazionato un adeguato margine di fase. Faccciamo riferimento a quanto già discusso nel capitolo
5 della parte dedicata agli amplificatori operazionali in tecnologia BJT dove è stato considerato
come principale approccio quello della compensazione “alla Miller”. Discutiamo quindi il caso
rappresentato nella figura 3.14 dove si ipotizza una compensazione ottenuta tramite una semplice
capacità Cc posta a cavallo del secondo stadio.
VDD
M3
M4
I1
IN
M6
I1
M1
M2
IN
OUT
Cc
I2
CL
2I1
M5
M7
Vbias
VSS
Figura 3.14
Compensazione in frequenza di un OTA a due stadi mediante una semplice capacità alla Miller
Nel caso qui considerato l’amplificatore è destinato a pilotare un carico capacitivo tramite il
secondo stadio configurato come generatore di corrente. Non è presente, come accadrebbe in un
amplificatore stand alone, uno stadio di uscita del tipo follower. Si richiede il pilotaggio di capacità
39
AMPLIFICATORI CMOS OTA” ON CHIP”
non troppo piccole, tipicamente dello stesso ordine di grandezza della capacità di compensazione: è
anzi pratica comune progettare l’amplificatore perché possa pilotare, con sufficiente margine di
fase, una capacità di valore massimo proprio uguale a quello di Cc.
In questa situazione un secondo polo è presente approssimativamente a
gm6
p2
CL
dove CL è la capacità di carico.
E’ poi presente uno zero nel semipiano destro
gm6
z
Cc
Per CL prossimo a Cc il secondo polo e lo zero destro risultano praticamente sovrapposti e sono
quindi ambedue da considerare per quanto riguarda l’ottenimento di un adeguato margine di fase.
Il prodotto guadagno-banda è dato al solito da
g mi
T
Cc
In linea di principio lo zero e il secondo polo potrebbero essere trasferiti a frequenze
sufficientemente alte rispetto al prodotto guadagno-banda dimensionando il secondo stadio per una
transconduttanza sufficientemente grande rispetto a quella dello stadio di ingresso: è questa la
tecnica normalmente utilizzata in tecnologia bipolare.
Di fatto nel caso degli amplificatori OTA MOS ciò, tranne casi particolari (ad esempio
capacità di carico molto più piccola della capacità di compensazione), non risulta possibile perchè:
- come già detto, le due singolarità – secondo polo e zero destro – sono sostanzialmente
sovrapposte e quindi lo sfasamento da recuperare è molto alto
- in molti casi, per ragioni di risposta in frequenza, la corrente di lavoro del primo stadio è
assai più alta (tipicamente un ordine di grandezza) di quella utilizzata in tecnologia bipolare; la
transconduttanza dipende dalla radice della corrente di lavoro e dalla radice del fattore di forma e
quindi sarebbero richiesti correnti e fattori di forma eccessivamente elevati per il secondo stadio.
Dunque la semplice capacità utilizzata nella struttura della figura 3.14 non è solitamente
utilizzabile.
VDD
M3
M4
I1
IN
M6
I1
M1
M2
M8
IN
Rc
OUT
Cc
I2
2I1
M5
M7
Vbias
VSS
Figura 3.15
Compensazione in frequenza mediante una rete resistenza-capacità
40
CL
AMPLIFICATORI CMOS
E’ facile mostrare che l’introduzione di una resistenza Rc di valore opportuno in serie alla
capacità di compensazione Cc può risolvere il problema. Questa soluzione è presentata nella figura
3.15 dove il resistore in serie alla capacità di compensazione è realizzato attraverso il MOS M8
polarizzato nella regione ohmica (nell’origine) e dimensionato in modo da ottenere il valore
desiderato della resistenza.
Infatti, in prima approssimazione,nella funzione di trasferimento lo zero si posiziona ora alla
pulsazione
1
z
1
Cc
Rc
gm6
e può quindi venir traslato verso le alte frequenze sino a portarsi all’infinito (eliminazione) per
Rc =
1
gm 6
Per valori ancora maggiori di Rc lo zero si porta nel semipiano sinistro e può quindi essere
utilizzato per ridurre lo sfasamento dovuto ai poli: in questo caso lo zero verrà posizionato in
prossimità del prodotto guadagno-banda (in genere un poco prima) e si realizza una configurazione
di singolarità del tipo “cancellazione polo-zero”.
La resistenza ottenuta tramite il MOS M8 risulta poco lineare e tende quindi, per grandi
segnali, a introdurre distorsione, per cui può convenire una soluzione del tipo mostrato nella figura
3.16 dove due MOS complementari M8 e M9 sono posti in parallelo: questa configurazione tende a
sopprimere le armoniche pari ed è quindi caratterizzata da linearità sensibilmente migliore.
VDD
M3
M4
I1
IN
I1
M1
M2
M6
M9
IN
Rc
M8
OUT
Cc
I2
CL
2I1
M5
M7
Vbias
VSS
Figura 3.16
Linearizzazione della resistenza di compensazione tramite la struttura complementare M8-M9
Le soluzioni sopra considerate, con l’inserimento di una resistenza in serie alla capacità di
compensazione, presentano il vantaggio di poter trasferire lo zero nel semipiano sinistro, ma sono
inefficienti dal punto di vista della reiezione dei disturbi presenti sulle alimentazioni. In particolare
un segnale (disturbo) presente sull’alimentazione positiva (in una soluzione complementare:
sull’alimentazione negativa) ad alta frequenza, in prima approssimazione, si accoppia direttamente
con l’uscita. Infatti nell’ipotesi, alquanto grossolana, ma significativa, che il carico M7 del secondo
41
AMPLIFICATORI CMOS OTA” ON CHIP”
stadio sia un generatore ideale di corrente, lo stesso segnale che si presenta sul source di M6 deve
presentarsi anche sul gate e, ad alta frequenza, quando Cc può essere assimilato a un corto circuito,
viene trasmesso in uscita. L’analisi, come detto è molto grossolana e non considera il fatto che M7
ad alta frequenza si discosta significativamente dall’essere un generatore ideale, che vi è partizione
tra Cc e CL, ecc. ma fornisce una indicazione, come già detto, abbastanza significativa.
L’altra alimentazione si comporta in maniera diversa e la reiezione può essere soddisfacente.
La reiezione dei disturbi dell’alimentazione è molto importante nei sistemi on-chip perchè
essi convivono con strutture a commutazione, digitali o a capacità commutate.
Un approccio alternativo a quello sopra considerato utilizzante una resistenza è quello
presentato nella figura 3.17. Esso consiste nell’impedire la trasmissione diretta del segnale tra
l’ingresso e l’uscita del secondo stadio attraverso la rete di retroazione e nel consentire quindi
solamente la trasmissione dall’uscita all’ingresso, cioè nel costituire una retroazione unidirezionale.
Fisicamente infatti è la bidirezionalità delle reti precedentemente considerate che genera lo zero nel
semipiano destro.
VDD
M3
M4
I1
IN
M6
I1
M1
M2
IN
Cc
2I1
M5
M8
OUT
I3
M9
Vbias
I2
CL
M7
VSS
Figura 3.17
Cammino unidirezionale di retroazione a cavallo del secondo stadio tramite l’inserzione di un
follower.
La capacità di compensazione viene pilotata unidirezionalmente dall’uscita all’ingresso del
secondo stadio tramite il follower M8-M9: in prima approssimazione lo zero scompare cioè è come
se fosse stato portato all’infinito. In realtà le capacità parassite trasmettono il segnale anche nel
verso opposto e lo zero non scompare, ma viene portato a frequenza molto alta.
Una soluzione alternativa è riportata nella figura 3.18 dove l’unidirezionalità è ottenuta
tramite l’inserzione di un MOS trasferitore, in configurazione gate comune; il problema è qui
costituito dalla necessità di accoppiare al meglio i generatori di corrente I3; inoltre sono ora
necessarie due tensioni di polarizzazione.
Come è facile constatare le soluzioni della figura 3.17 e della figura 3.18 presentano il
vantaggio di una migliore reiezione dei disturbi di alimentazione in quanto evitano un
accoppiamento diretto, verso l’uscita, da una qualsiasi delle alimentazioni. Ovviamente però non
consentono di spostare lo zero nel semipiano sinistro e di fruire dello sfasamento favorevole così da
esso introdotto.
accoppiamento con i disturbi di alimentazione.
42
AMPLIFICATORI CMOS
VDD
M3
I1
M6
I1
M1
IN
I3
M4
M8
M2
IN
Vbias2
I3
2I1
M5
OUT
Cc
I2
CL
M7
Vbias1
VSS
Figura 3.18
Cammino unidirezionale di retroazione a cavallo del secondo stadio tramite l’inserzione di un
gate comune.
Una ulteriore soluzione possibile è quella della figura 3.19 in cui è utilizzata una
compensazione Rc Cc, ma si evita, tramite l’interposizione del follower M10-M11 un forte
VDD
M3
M4
I1
IN
M6
M10
I1
M1
M2
IN
Rc
I3
M8
Cc
I2
OUT
2
M7
2I1
M5
M9
M11
Vbias
VSS
Figura 3.19
Soluzione circuitale utilizzante una rete di compensazione Rc Cc, ma che evita accoppiamento
diretto con l’alimentazione.
43
CL
AMPLIFICATORI CMOS COMPLETAMENTE DIFFERENZIALI
Cap. 5
AMPLIFICATORI OPERAZIONALI CMOS
COMPLETAMENTE DIFFERENZIALI (“FULLY
DIFFERENTIAL”)
5.1 CARATTERISTICHE GENERALI DEGLI AMPLIFICATORI
COMPLETAMENTE DIFFERENZIALI
Gli amplificatori sinora descritti sono, in generale, amplificatori differenziali in ingresso, ma
non in uscita. In un classico amplificatore operazionale, ad esempio, il primo stadio è differenziale
in ingresso e lo è, elettricamente, anche se solitamente non topologicamente, anche in uscita; a un
certo punto della struttura, solitamente già a partire dal secondo stadio, il segnale viene trattato
(amplificato) tramite configurazioni non differenziali e l’uscita dell’intero sistema risulta singola
(single ended). E’ ovviamente possibile realizzare amplificatori che siano completamente
differenziali, cioè che mantengano il trattamento differenziale del segnale sino all’uscita. D’altro
canto, in base a quanto detto sopra, un semplice stadio differenziale (usato “correttamente”, cioè
sfruttandone appieno la differenzialità ovvero la simmetria), usato singolarmente, costituisce un
semplice (anche se, per certi versi, primitivo) amplificatore completamente differenziale. Nella
figura 5.1 la stessa struttura viene utilizzata (a) single ended e (b) differenzialmente in uscita.
VDD
VDD
Vbias 2
Vbias
M3
M3
M4
OUT
IN1
M2
M1
OUT1
IN 2
IN1
Vbias 1
M5
M4
OUT2
M2
M1
Vcm f
M5
VSS
VSS
(a)
(b)
Figura 5.1
Semplice stadio differenziale
(a) con uscita single ended
(b) con uscita differenziale
44
IN 2
AMPLIFICATORI CMOS
Anzitutto il guadagno della configurazione (b) è doppio di quello della configurazione (a):
viene sfruttata appieno la transconduttanza dei transistori di ingresso.
La dinamica del segnale di uscita in (b) è doppia che in (a), il che è particolarmente
vantaggioso nel caso di basse tensioni di alimentazione: infatti se l’uscita 2 sale, l’uscita 1 scende
corrispondentemente.
Il rumore e i disturbi di modo comune vengono rigettati (ovviamente tanto più quanto più la
simmetria è effettivamente realizzata) nel caso (b), ma non nel caso (a); ad esempio il rumore
prodotto dalla “coda” M5 si ritrova in uscita nel caso (a), ma non nel caso (b); disturbi provenienti
dall’alimentazione negativa si comportano allo stesso modo; così pure il rumore di substrato che,
attraverso capacità parassite, risulta, in prima approssimazione, accoppiato come modo comune agli
ingressi e ad altri nodi del circuito. In molte applicazioni una struttura differenziale conduce, per
effetto del maggior segnale disponibile in uscita, ad un rapporto segnale/rumore più elevato che non
una struttura single ended. Ad esempio ponendo sull’ingresso 1 della struttura single ended un
resistore R (potrebbe derivare dalla rete di retroazione; l’altro terminale a massa) esso produce in
uscita una certa potenza di rumore; ponendo equivalentemente un resistore R su ambedue gli
ingressi della struttura differenziale la potenza di rumore raddoppia, ma quella di segnale
quadruplica.
In applicazioni temporizzate, ad esempio in sistemi a capacità commutate, attraverso
accoppiamenti capacitivi parassiti il segnale di clock produce disturbi di commutazione che, in un
sistema totalmente simmetrico, risultano essenzialmente di modo comune e vengono quindi rigettati
efficientemente.
Errori sistematici, ad esempio le componenti sistematiche della tensione di offset, in quanto
per loro natura uguali sui due percorsi simmetrici del segnale, vengono anch’essi cancellati
efficientemente.
In un sistema completamente differenziale la caratteristica di trasferimento è dispari e
quindi, idealmente, le componenti di distorsione risultano essere solo quelle dispari.
Gli ingressi e le uscite sono simmetrici rispettivamente rispetto al livello di modo comune in
ingresso e in uscita e quindi è possibile in sede di progetto scegliere indipendentemente tali livelli
adattandoli all’applicazione cui è destinato l’amplificatore differenziale.
Naturalmente le proprietà sopra elencate caratterizzano il sistema reale solo in misura
limitata fortemente dipendente dalla effettiva simmetria ottenuta anche in fase di realizzazione:
deve quindi essere attentamente curata la simmetria in termini di architettura e condizioni elettriche
di funzionamento (polarizzazioni), ma deve essere assai curato anche il layout di dettaglio. Ciò
nonostante nelle applicazioni reali la simmetria non risulta efficiente come previsto idealmente e ciò
perché molti disturbi, rumore, errori sistematici, ecc. non si presentano di fatto come segnali
puramente di modo comune, ma, attraverso asimmetrie di accoppiamento, dipendenza dal livello
delle tensioni in gioco sui due rami del sistema o delle alimentazioni, risultano parzialmente
convertiti in modo differenziale. In ogni caso un amplificatore completamente differenziale, per
quanto riguarda le proprietà sopra elencate, se ben progettato e realizzato risulta nettamente
superiore a un amplificatore single ended.
Gli amplificatori in discussione sono in ogni caso notevolmente più complessi degli
amplificatori single ended, sia in termini di architettura di base che in termini di circuiti di servizio
addizionali. Ciò comporta significative difficoltà di progetto e realizzazione e, tra l’altro, maggiore
occupazione di area. Vengono realizzati solitamente in tecnologia CMOS, ma può essere impiegata
anche una tecnologia bipolare.
Nella figura 5.1 il terminale corrispondente al gate del transistore di “coda” M5 è stato
indicato con Vcm, cioè come utilizzato per l’applicazione di un segnale di controllo del modo
comune. In un amplificatore single ended uno dei terminali di ingresso, quello invertente, è
utilizzato per la retroazione derivata dall’unico terminale di uscita e si comporta quindi come una
“terra virtuale” in “tracking” con l’altro terminale che provvede a fornire un livello di riferimento:
risultano così fissati i livelli di modo comune sia in ingresso che in uscita. In un amplificatore
completamente differenziale ciò non avviene in quanto i due rami sono retroazionati separatamente,
45
AMPLIFICATORI CMOS COMPLETAMENTE DIFFERENZIALI
anche se simmetricamente, e quindi il livello di modo comune in uscita non è imposto, con
riferimento a quello di ingresso, dalla retroazione che agisce sul segnale differenziale, ma deve
essere fissato internamente in relazione a un opportuno riferimento di tensione. Si consideri, quale
esempio elementare la figura 5.1 (b). Il livello in tensione delle due uscite è definito internamente
con precisione, riproducibilità e stabilità del tutto insoddisfacenti per cui è necessario introdurre una
retroazione, ovviamente sul solo modo comune, tramite una opportuna rete utilizzante un
riferimento adeguato. Ciò è mostrato nella figura 5.2 dove il gate di M5 è appunto utilizzato per
applicare alla struttura amplificatrice la retroazione anzidetta.
VDD
BIAS
M3
M4
VO2
VO1
Vi1
M2
M1
CMF
Rete di retroazione
sul modo comune
V i2
VCM
Vcm f
M5
Vcm f
VSS
Figura 5.2
Semplice struttura completamente differenziale con rete di retroazione sul modo comune
La retroazione sul modo comune, oltre a fissare il livello di tensione in uscita, ovviamente
contribuisce anche in misura essenziale a migliorare la reiezione dell’amplificatore al modo
comune, caratteristica questa che, come visto più sopra, è fondamentale per ottenere un
soddisfacente comportamento nei riguardi di disturbi, rumore, errori sistematici, ecc.
E’ evidente che la rete di retroazione sul modo comune costituisce una, anzi in generale la
principale, delle cause della complessità di questi amplificatori. Essa richiede area, dissipa potenza,
introduce rumore, limita in genere la dinamica di uscita e la risposta in frequenza. Il progetto di un
buon circuito di retroazione sul modo comune costituisce parte essenziale del progetto di tutto
l’amplificatore e ne è spesso la più complessa.
5.2 DIMENSIONAMENTO DELLA RETE DI RETROAZIONE SUL
MODO COMUNE NEL CASO DI UNA STRUTTURA MOLTO
SEMPLICE
Consideriamo la semplice struttura già rappresentata nella figura 5.2 e nuovamente riportata
nella figura 5.3 dove si evidenzia anche un carico capacitivo.
46
AMPLIFICATORI CMOS
VDD
BIAS
M3
CL
M4
VO2
VO1
Vi1
M2
M1
V i2
CMF
Rete di retroazione
sul modo comune
CL
VCM
Vcm f
M5
Vcm f
VSS
Figura 5.3
La struttura della figura precedente con carico capacitivo
Le specifiche di progetto siano:
tecnologia p-well
Leff= 1,5
tox = 250 Å
→
Cox = 14 10-4 pF/2
Canale N
Canale P
2
N = 650 cm /Vs
P = 300 cm2/Vs
k’N = 45,5 A/V2
k’P = 21 A/V2
VtN = 0,7 V
VtP = -0,7 V
-1
N = 0,04 V
P = 0,08 V-1
Tensione di alimentazione V DD = V SS = 2, 5V
Onde determinare il guadagno differenziale conviene utilizzare la relazione
2
1
Ad =
V ovi l N + l P
dove con Vovi si è indicata la tensione di overdrive dei transistori di ingresso, che, per motivi
di dinamica deve essere una frazione piccola della tensione di alimentazione, ad esempio il 10%.
Quindi con Vovi pari a 250 mV e utilizzando i valori di della tecnologia, si ottiene
Ad = 66,7
Il guadagno di modo comune, inteso come guadagno tra un ingresso di modo comune e la
singola uscita, si può ottenere spezzando la struttura in esame in due metà simmetriche di cui una è
rappresentata nella figura 5.4 in cui il transistore M5 diviene ½ M5, cioè un transistore percorso
dalla corrente I di un singolo ramo e con rapporto di forma pari a metà del transistore di partenza. Il
transistore M1 risulta quindi degenerato dal transistore ½ M5 e quindi la sua resistenza di drain
risulta moltiplicata per il fattore
1 + gm 1ro 5(1/ 2)
47
AMPLIFICATORI CMOS COMPLETAMENTE DIFFERENZIALI
dove ro5(1/2) è la resistenza di drain del transistore M5 dimezzato. Tale fattore risulta molto
maggiore di 1 e quindi la resistenza del nodo di uscita è approssimabile con quella ro3 di drain del
transistore di carico M3. Quindi il guadagno di modo comune nel caso di pilotaggio dall’ingresso
risulta dato da
l
Acm ; N = 0, 5
lP
Il guadagno nel caso di pilotaggio a partire dal gate di M5, il quale entra in gioco nel
determinare il guadagno dell’anello di retroazione sul modo comune, è dato da
2 1
Acmf ;
= 100
V ov 5 l P
avendo utilizzato anche per M5 una tensione di overdrive pari a 250 mV.
Il guadagno relativo al pilotaggio a partire dal gate di M5 è molto maggiore di quello
relativo al pilotaggio dall’ingresso per effetto delle transconduttanze equivalenti molto diverse.
VDD
BIAS
M3
VO1
CL
M1
Vi1
Vcm f
1/2 M5
VSS
Figura 5.4
Mezzo circuito
La struttura della rete di retroazione sul modo comune è mostrata nella figura 5.5. Essa è
costituita dalla rete di prelievo del modo comune in uscita all’amplificatore, cioè del valor medio
delle tensioni di uscita
V + VO 2
V Ocm = O 1
2
dal confronto tra tale tensione e la tensione di riferimento VCM
e dall’amplificatore di sense con guadagno Acms che legge e amplifica la differenza tra Vocm
e VCM e invia a un ingresso opportuno dell’amplificatore differenziale il segnale di retroazione sul
modo comune. Tale ingresso deve essere tale da consentire il controllo del modo comune senza
48
AMPLIFICATORI CMOS
interferire con l’amplificazione del modo differenziale, deve cioè essere un ingresso di modo
comune dell’amplificatore: nel semplice esempio in discussione l’ingresso naturale è costituito dalla
“coda” dello stadio differenziale.
CMF
RETE DI RETROAZIONE SUL MODO COMUNE
VO2
VO1
Rivelatore
del modo comune
in uscita
=
VOcm
VO1 + VO2
2
+
-
VCM
Vcm f
Amplificatore
di sense
A cm s
VOcm- VCM
Figura 5.5
Struttura della rete di retroazione sul modo comune CMF
Il guadagno d’anello della retroazione sul modo comune è dato quindi da
(Gloop )cm = Acmf ×Acms
Uno dei principali problemi che devono essere affrontati nel progetto della rete di
retroazione sul modo comune è costituito dalla necessità di ottenere un margine di stabilità
sufficiente e soddisfacentemente riproducibile.
Nel semplice esempio considerato l’anello di retroazione sul modo comune è caratterizzato,
così come in molti altri casi, da un polo dominante dovuto alla capacità di carico CL. E’ quindi
possibile, se non intervengono altre singolarità a frequenze più basse o comunque troppo vicine,
definire un prodotto guadagno banda per tale anello.
Peraltro sono sempre presenti altri poli che possono intervenire in misura significativa a
determinare il margine di fase ottenibile. Nel caso in esame ad esempio sono certamente presenti
poli derivanti dalla funzione di trasferimento dell’amplificatore di sense e la capacità associata al
nodo di drain di M5 introduce anch’essa un polo e perciò, al fine di ottenere un margine di fase
sufficiente, è spesso necessario ridurre opportunamente il prodotto guadagno banda. Queste
singolarità intervengono nel determinare la risposta in frequenza dell’anello di retroazione sul modo
comune, ma non compaiono nella risposta al modo differenziale e quindi è in generale necessario
mantenere il prodotto guadagno banda dell’anello di retroazione ad un valore inferiore a quello del
cammino differenziale.
Evidentemente un primo passo consiste nell’utilizzare un guadagno in continua non troppo
elevato ed è quindi pratica frequente porre il guadagno dell’amplificatore di sense pari a 1.
In questo caso, e per l’amplificatore considerato, il prodotto guadagno banda è dato
semplicemente da
1 gm 5
wGBcm =
2 CL
dove il fattore ½ deriva dall’aver utilizzato, come più sopra mostrato, il mezzo circuito.
49
AMPLIFICATORI CMOS COMPLETAMENTE DIFFERENZIALI
Qualora risultasse necessario ridurre ulteriormente il prodotto guadagno banda ciò può
essere evidentemente ottenuto o aumentando la capacità di carico CL o diminuendo la
transconduttanza gm5.
Intervenire sulla capacità di carico aumentandola significa intervenire parimenti sulla
risposta in regime differenziale aumentandone, solitamente in misura ingiustificata, il margine di
fase e riducendo la banda effettiva; inoltre CL è solitamente, almeno entro certi limiti, una specifica
di progetto.
Conviene quindi intervenire sulla transconduttanza in gioco, riducendola opportunamente.
Ciò è possibile molto semplicemente spezzando in due parti, da porre in parallelo, il transistore M5,
utilizzandone una soltanto per la retroazione. Ciò è mostrato nella figura 5.6.
VDD
BIAS 2
M3
M4
VO2
VO1
Vi1
BIAS 1
M2
M1
V i2
Vcm f
M51
M52
VSS
Figura 5.6
Riduzione della transconduttanza utilizzata nell’anello di retroazione sul modo comune per
pilotare la struttura differenziale
La transconduttanza che ora determina il prodotto guadagno banda in discussione è gm52 ed è
quindi determinata dal dimensionamento geometrico dei due transistori che, ovviamente, onde
mantenere inalterata la dinamica di ingresso dell’amplificatore, verranno polarizzati in maniera da
avere in comune la tensione di overdrive. La transconduttanza utilizzata è quindi una frazione di gm5
pari al rapporto tra la corrente di polarizzazione di M52 e la corrente totale I.
I 52
I
gm 52 =
gm 5 = 52 gm 5
I 51 + I 52
I
æW ÷
ö
æW ö
æW ö æW ö
I
I - I
÷
çç ÷ = ' 52 2
çç ÷
= ' 252 = çç ÷
÷
÷ - ççè ø
÷
÷
÷
÷
è L ø51
èL ø
è L ø52 k NV ov
kNV ov
L ÷52
5
e quindi, utilizzando, come naturale, la stessa lunghezza di canale
W 51 + W 52 = W 5
Aver diminuito la transconduttanza in gioco equivale evidentemente a ridurre il guadagno
dell’anello di retroazione e quindi lo svantaggio del procedimento risiede in una minore efficacia
del controllo del modo comune stesso.
50
AMPLIFICATORI CMOS
Sono possibili diverse soluzioni per quanto riguarda la realizzazione della rete di prelievo
del modo comune in uscita e dell’amplificatore di sense. Spesso tali circuiti non sono distinti, ma
sono integrati in una stessa struttura.
Una rete molto semplice per ottenere il valor medio delle tensioni in uscita è semplicemente
costituita da due resistori uguali (accuratamente accoppiati) che, per partizione consentono di
prelevare il modo comune in uscita, così come mostrato nella figura 5.7. Questa soluzione peraltro
comporta alcuni inconvenienti in quanto: carica resistivamente l’uscita dell’amplificatore,
riducendone il guadagno differenziale e quindi anche la reiezione del modo comune, ameno di
utilizzare resistori di elevato valore, grande rispetto alla resistenza di uscita propria
dell’amplificatore; introduce un ulteriore polo per effetto della capacità associata al nodo che
costituisce il punto di prelievo (centro del partitore).
Al primo inconveniente si può ovviare inserendo dei follower a pilotare i resistori, ma ciò
comporta l’introduzione di una traslazione di livello e quindi una riduzione della dinamica nonché
minor precisione e riproducibilità nel prelievo del valor medio a causa del non perfetto
accoppiamento tra le VGS dei transistori utilizzati.
Al secondo inconveniente si può porre parzialmente riparo inserendo in parallelo ai resistori
delle capacità che introducono uno zero (compensazione feedforward).
VDD
M10
M3
BIAS 2
M4
R
VO2
VO1
Vi1
BIAS 1
M1
M51
R
M2
VOcm
M6
M7
VCM
V i2
Vcm f
M52
M8
M9
VSS
Figura 5.7
Amplificatore completo della rete di prelievo del modo comune e dell’amplificatore di sense
Nella figura è rappresentato anche un possibile amplificatore di sense costituito dai MOS
M6-M10. Si tratta di una struttura differenziale tra gli ingressi della quale si confrontano il modo
comune prelevato e la tensione di riferimento VCM. Come è facilmente comprensibile gli
amplificatori di sense sono praticamente sempre costituiti da strutture differenziali.
Il guadagno del circuito di sense considerato è dato da
' W
1 gm 6
1 kP ( L )6
Acms =
=
2 gm 8
2 kN' (W )
L 8
Imponendo la condizione che tale guadagno sia pari a 1 si ha
51
AMPLIFICATORI CMOS COMPLETAMENTE DIFFERENZIALI
kP' (W L ) = 4kN' (W L )
6
8
e quindi
(W L )
6
= 8, 67 (W L )
8
ovvero, per uguali lunghezze di canale
W6 = 8,67 W8
La corrente di lavoro dell’amplificatore di sense va scelta in considerazione della
dissipazione di potenza accettabile per una struttura che, per certi versi, si può considerare
ausiliaria, e dell’occupazione di area accettabile.
Per quanto riguarda la dissipazione di potenza conviene evidentemente mantenere la
corrente nell’amplificatore di sense inferiore quanto possibile a quella dell’amplificatore principale
e quindi
1
IM8 < IM5
2
Avendo M5 e M8 la stessa tensione di overdrive è verificata l’uguaglianza
IM5
I
= M8
æW ö
æW ö
ç ÷
ç ÷
÷
÷
çè L ø
çL ø
è
5
8
e quindi la disuguaglianza precedente comporta minor rapporto di forma per M8 e, di
conseguenza, minore occupazione di area a pari lunghezza di canale.
Ponendo
1
con <1
IM8 = a IM5
2
si ha
æW ö
I M 8 æW ö
1 æW ö
çç ÷
ç ÷
ç ÷
÷
÷
÷
÷ = I èç L ø
÷ = 2 a èç L ø
÷
èL ø
8
5
5
M5
e utilizzando uguali lunghezze di canale
1
W 8 = aW 5
2
Peraltro il polo associato al nodo di gate di M8 e M5 si sposta progressivamente verso
frequenze più basse al diminuire della corrente IM8 . Infatti la pulsazione del polo si può scrivere
1
1
a gm 5
a gm 5
gm 8
2
2
w5- 8 ;
=
=
1
C GS 52 + C GS 8 C GS 52 + gC (gate - canale )8 C
ga C (gate - canale )5
GS 52 +
2
dove <1 rappresenta il rapporto tra la corrente IM8 e ½ IM5 e C(gate-canale)8 rappresenta la
frazione di capacità tra gate e canale di M8 da attribuire a gate-source (si sono trascurate le altre
componenti, non di canale, della capacità).
5-8 è quindi una funzione decrescente al decrescere di e il polo corrispondente, che
interviene nella funzione di trasferimento del guadagno di anello della retroazione sul modo
comune, riduce progressivamente il margine di fase. Perciò esiste un limite inferiore della corrente
di polarizzazione dell’amplificatore di sense.
La tensione di riferimento VCM che determina il livello del modo comune a riposo in uscita
deve essere scelta in modo da corrispondere al centro della dinamica di uscita dell’amplificatore
differenziale. Ipotizzando una alimentazione simmetrica gli ingressi possono essere considerati a
riposo a 0 V; in prima approssimazione, in presenza di retroazione, gli ingressi si scostano poco
dalla tensione di riposo.
Nelle condizioni sopra considerate il limite inferiore della dinamica di uscita è determinato
dall’entrata in regione ohmica del transistore M1 (M2) e cioè quando il drain di M1 (M2) scende
52
AMPLIFICATORI CMOS
sotto al gate, cioè 0 V, di una quantità pari alla tensione di soglia VtN; il limite superiore è
determinato dall’entrata in regione ohmica del transistore M3 (M4) e cioè VDD – Vov3. Nell’esempio
considerato
- 0, 7V < V o < 2, 25V
avendo sempre assunto una tensione di overdrive pari a 0,25 V.
Il centro della dinamica è dunque posto a 0,775 V e quindi
VCM = 0,775 V
Naturalmente questo livello di tensione deve essere compatibile con la dinamica di ingresso
dell’amplificatore di sense il cui limite inferiore è determinato dall’entrata in regione ohmica di M7
(M9), cioè - 2,25 V, e quello superiore dall’entrata in regione ohmica di M10 (con M6 e M7 in
funzionamento normale (piena VGS), cioè + 1,3 V. VCM risulta quindi compatibile.
Una soluzione alternativa è riportata nella figura 5.8.
VDD
M3
M10
BIAS
M4
M12
VO2
VO1
M6
M9
M7
M8
VCM
Vi1
M2
M1
M5
V i2
Vcm f
M11
VSS
Figura 5.8
Circuito alternativo di retroazione sul modo comune
L’amplificatore di sense qui svolge anche la funzione di prelievo del modo comune. Si tratta
sempre di una struttura differenziale costituita da due coppie differenziali M6, M7, M10 e M8, M9,
M12 che rispondono al modo comune inviando un segnale di correzione sul transistore M11 che lo
trasmette alla coda dello stadio di ingresso.
A riposo, nel caso il sistema sia perfettamente bilanciato, cioè il guadagno d’anello molto
grande e i transistori M6-M8 perfettamente accoppiati, la corrente che scorre in M11 e che viene
specchiata in M5 determina Voc = VCM e vale
I + I 12
I 11 = 10
= I 10
essendo I10 = I12
2
Nel caso gli ingressi a M6 e M8 (cioè le uscite dello stadio differenziale Vo1 e Vo2) abbiano
modo comune pari a VCM tale corrente non viene modificata. Ciò è vero non solo per piccoli
segnali, purché i transistori siano bene accoppiati, perché la struttura è simmetrica e riceve un
pilotaggio simmetrico (Vo1-VCM = VCM –Vo2) e quindi le non linearità di un ramo compensano
quelle dell’altro.
Nel caso gli ingressi a M6 e M8 (cioè le uscite dello stadio differenziale Vo1 e Vo2)
tendessero ad avere modo comune discosto da VCM tale corrente viene proporzionalmente
modificata attraverso la transconduttanza di M6 (M8) e l’anello interviene cancellando lo
53
AMPLIFICATORI CMOS COMPLETAMENTE DIFFERENZIALI
scostamento. La proporzionalità sussiste però solo per piccoli segnali e quindi solamente in questo
caso la cancellazione è del tutto efficiente.
Per grandi segnali, che possono essere presenti all’uscita dell’amplificatore differenziale, la
non linearità della caratteristica di trasferimento dei transistori della struttura di sense conduce alla
presenza nella corrente di retroazione Icms nel transistore M11 di termini di ordine superiore
derivanti dalla tensione differenziale Vod, con ovvia prevalenza del termine quadratico. Ciò ha come
conseguenza una interazione tra il modo differenziale e il modo comune e, per rettificazione, può
produrre uno spostamento del livello di modo comune in uscita.
Va anche osservato che la struttura di sense opera correttamente solo se i transistori che la
compongono rimangono attivi. Ciò si verifica solamente per ampiezze dei segnali di ingresso Vo1VCM e VCM –Vo2 che non superino una determinata soglia: altrimenti durante una porzione del
segnale differenziale di uscita la retroazione non interviene. Le caratteristiche della rete di
retroazione sul modo comune impongono quindi dei limiti alla dinamica differenziale
dell’amplificatore. Dato che la dinamica di ingresso di una coppia differenziale è determinata dalla
tensione di overdrive, ciò significa che i transistori M6-M9 devono essere progettati con elevata
tensione di overdrive.
Quanto sopra discende dal fatto che la struttura della figura 5.8 è pilotata direttamente dalle
tensioni in uscita dall’amplificatore differenziale e vede quindi sia il modo comune che le
componenti differenzial Vo1 e Vo2 e mostra come, in dipendenza dalle soluzioni circuitali utilizzate,
la rete di controllo del modo comune possa interagire con il trasferimento del segnale differenziale.
Si noti come la soluzione circuitale appena discussa abbia il pregio di non caricare
apprezzabilmente le uscite differenziali dell’amplificatore rispetto a quella utilizzante una rete
resistiva per il prelievo del segnale di modo comune. Peraltro tale rete pilota l’amplificatore di sense
tramite un segnale di modo comune Vocm e, salvo il non perfetto accoppiamento dei resistori, non
trasmette le componenti differenziali Vo1 e Vo2 che invece, come già detto, vengono viste dalla
struttura della figura 5.8.
Esistono varie soluzioni alternative a quelle sopra presentate.
Il circuito CMF può essere realizzato utilizzando transistori in regione ohmica come, ad
esempio, mostrato nella figura 5.9.
I transistori M6, M7 e M9, M10 sono polarizzati in regione ohmica: a ciò provvede il loro
dimensionamento geometrico essendo fissati VCM (= Vocm = Vo1 = Vo2, in assenza di segnale
differenziale) e la corrente di lavoro. Devono essere accuratamente accoppiati tra loro, cioè tutti
uguali. Anche M5 e M8 devono essere bene accoppiati.
In assenza di segnale differenziale in uscita sui gate di M6 e M7 compare Vocm = Vo1 = Vo2 .
Considerato l’accoppiamento tra i transistori ed avendo imposto correnti uguali nel ramo principale
e in quello di sense, il circuito di retroazione forza Vocm = VCM. Infatti se Vocm tendesse ad esempio
a salire aumenterebbe la tensione VGS di ambedue i transistori M6 e M7 e si ridurrebbe la loro
resistenza equivalente
1
1
rD ;
=
' W
' W
2kN ( L ) (VGS 6 - V tN ) 2kN ( L ) (VGS 7 - V tN )
6
7
e quindi la caduta VDS ai loro capi; aumenterebbe quindi la tensione VGS di M5, essendo la
sua tensione di gate fissata da M8, e la conseguente corrente richiamata attraverso M1 e M2 si
opporrebbe alla tendenza ipotizzata. Un altro modo, ovviamente del tutto equivalente, di descrivere
tale funzionamente consiste nel notare che le due strutture M5-M7 e M8-M10 formano uno
specchio (degenerato resistivamente) e quindi il pozzo M8-M10 si oppone a variazioni della
corrente in M5-M7.
54
AMPLIFICATORI CMOS
VDD
M11
M3
VO1
M4
I
Vi1
BIAS
VO2
I
M2
M1
2I
V i2
M5
M8
VCM
M6
M7
VCM
M9
M10
VSS
Figura 5.9
Circuito di retroazione sul modo comune utilizzante transistori M6-M9 polarizzati in regione
ohmica
Se in uscita all’amplificatore differenziale compare una tensione differenziale Vo2 - Vo1
diversa da zero, nell’ipotesi abbastanza bene verificata che per i transistori M6 e M7 VDS<<VGS e
cioè operino bene addentro alla regione ohmica e si comportino quindi effettivamente come dei
resistori (bene accoppiati), la rete di retroazione risulta lineare per quanto riguarda il prelievo del
segnale di uscita e quindi sensibile solo al modo comune e non a quello differenziale.
L’utilizzo di transistori polarizzati in regione ohmica consente quindi di ottenere maggiore
linearità e quindi minore interazione tra il cammino del segnale differenziale e quello del modo
comune. Peraltro anche in questo caso la dinamica di uscita è condizionata dalla necessità che tutti i
transistori rimangano attivi: evidentemente i transistori interessati dall’escursione del segnale
differenziale in uscita sono M6 e M7: l’ampiezza di picco negativa di ciascuna uscita non deve
superare in valore assoluto |VSS| – VtN. Inoltre il guadagno dell’anello di retroazione risulta limitato
dal fatto che in regione ohmica i transistori hanno transconduttanza equivalente inferiore che in
saturazione e per questa stessa ragione anche la sua banda viene ridotta.
La retroazione sul modo comune non deve essere necessariamente applicata alla coda dello
stadio differenziale, nemmeno in un amplificatore monostadio. Può anzi essere conveniente
utilizzare evitare di inserire tale nodo entro l’anello in quanto, come visto più addietro, esso
introduce un polo secondario che può intervenire nel determinare il margine di fase e può quindi
richiedere interventi correttivi. Una soluzione frequentemente adottata è riportata nella figura 5.10.
55
AMPLIFICATORI CMOS COMPLETAMENTE DIFFERENZIALI
VDD
M9
M3
BIAS 2
M4
I1
M8
VCM
I1
R
VO1
Vi1
M7
M6
R
VO2
M2
M1
M5
I2
2
I2
2
I2
V i2
BIAS 1
VSS
Figura 5.10
CMF che inietta direttamente la retroazione sui terminali di uscita
I due transistori M6 e M7 devono essere accuratamente accoppiati e il transistore M8 deve
essere dimensionato in modo da portare il doppio della loro corrente. La terna M6-M8 può essere
vista come una coppia differenziale costituita dal transistore M8 e da un transistore sdoppiato in
M6-M7. Si confrontano quindi attraverso tale coppia differenziale il modo comune Vocm e il suo
riferimento VCM: il segnale errore amplificato produce, attraverso i drain del transistore sdoppiato,
le correnti di correzione che vengono direttamente iniettate nelle uscite dell’amplificatore
differenziale.
L’evidente difetto di questa soluzione così come presentata nella figura 5.10 è costituito dal
fatto che i transistori M6 e M7 caricano direttamente i terminali di uscita. Ciò peraltro è dovuto al
fatto che è stata utilizzata una struttura dell’amplificatore differenziale particolarmente semplice:
strutture più complesse (ad esempio cascole) consentono di evitare in larga misura questo
inconveniente.
5.4 RETI CMF A TEMPO DISCRETO (A CAPACITA’
COMMUTATE)
Ricordiamo che un resistore può essere realizzato, in un sistema a commutazione
temporizzato, attraverso la tecnica delle capacità commutate secondo lo schema riportato nella
figura 5.11.
Gli interruttori 1 e 2 operano in controfase con periodo T e la resistenza equivalente per
1
T
pulsazioni di lavoro w < <
è data da R =
T
C
I resistori utilizzati in alcuni dei circuiti CMF discussi nel paragrafo precedente per
prelevare il modo comune, possono essere sostituiti da equivalenti resistori a capacità commutate.
56
AMPLIFICATORI CMOS
Tale approccio consente di evitare il carico resistivo altrimenti applicato ai terminali di
uscita dell’amplificatore e di migliorare le prestazioni dal punto di vista della dinamica di uscita.
1
1
V1
V2
C
2
2
R = T/C
Figura 5.11
Schema di principio di un resistore a capacità commutate. T è il periodo del clock
Nella figura 5.12 una rete CMF a capacità commutate è utilizzata per controllare il modo
comune nel semplice amplificatore monostadio sinora considerato (figura 5.2).
Le capacità commutate sono indicate con CR e i resistori equivalenti sono ottenuti tramite la
rete a commutazione costituita dai condensatori stessi e dagli interruttori 1 e 2.
Le capacità indicate con C0 sono poste tra gli ingressi Vo1 e Vo2 e l’uscita Vcmf della rete
CMF e sono quindi posti in retroazione: insieme ai resistori R posti in serie agli ingressi
costituiscono quindi un (doppio) integratore a capacità commutate.
Trattandosi di una rete capacitiva è necessario un riferimento di tensione Vbias che permetta
di caricare e scaricare i condensatori CR e che, nella struttura considerata, fornisce anche la
polarizzazione di M5, cioè dell’amplificatore differenziale.
Tale tensione è ottenuta replicando la struttura dell’amplificatore differenziale per quanto
riguarda i transistori M3, M4 e M5 attraverso i transistori M31, M41 e M51 ad essi bene
accoppiati: il gate di M51 fornisce la tensione di polarizzazione richiesta in quanto M31 e M41 sono
polarizzati esattamente come M3 e M4.
La struttura a capacità commutate ha il vantaggio di non limitare la dinamica
dell’amplificatore differenziale in quanto la rete di prelievo del modo comune è costituita
unicamente da elementi passivi e da interruttori; è quindi anche, equivalentemente, una rete lineare.
Se gli interruttori sono realizzati tramite transistori a canale n e a canale p posti in parallelo e
pilotati dal segnale di clock e dal suo complemento (transmission gate), il segnale trasmissibile
risulta limitato in ampiezza solamente dalle alimentazioni
Ciò è vero ovviamente nel caso di interruttori ideali. Negli interruttori MOS reali all’atto
della commutazione on-off una certa quantità di carica associata al canale e alla capacità di overlap
tra gate e source e gate e drain viene trasferita ai terminali di source e di drain e quindi nella
struttura considerata sulla capacità commutata CR. Tale carica è proporzionale all’area del
transistore (più esattamente alla larghezza W) e quindi questo effetto non risulta del tutto
trascurabile in quanto un interruttore MOS, per avere bassa resistenza in chiusura, deve avere
elevato rapporto di forma W/L.
Il trasferimento di carica sopra considerato equivale ad una iniezione spuria di carica che si
sovrappone a quella dovuta al pilotaggio da parte del modo comune Vocm e quindi produce un offset
di tensione che ha come effetto un certo scostamento di Vocm da VREF.
57
AMPLIFICATORI CMOS COMPLETAMENTE DIFFERENZIALI
VDD
BIAS
M3
1
M4
2
M31
M41
VO2
C0
1
CR
2
Vbias
C0
1
CR
2
VO1
Vi1
M2
M1
V i2
VCM
M5
Vcm f
M51
VSS
Figura 5.12
Rete CMF a capacità commutate applicata al semplice amplificatore della figura 5.2
Ciò equivale anche ad una riduzione dell’effettiva dinamica di uscita dell’amplificatore.
Va infine ricordato che la banda utilizzabile dell’amplificatore è determinata dalla frequenza
di clock in quanto deve essere rispettata la condizione già riportata
1
w<<
T
5.5 ESEMPI DI AMPLIFICATORI COMPLETAMENTE
DIFFERENZIALI
Nei precedenti paragrafi abbiamo utilizzato, a titolo di esempio, un amplificatore
differenziale molto semplice, costituito da un solo stadio.
Una limitazione di tale struttura è il guadagno differenziale assai modesto che consente di
ottenere. Da questo punto di vista il problema può essere risolto adottando una struttura cascode
oppure una struttura a due stadi.
Nella figura 5.13 è rappresentato un amplificatore con struttura folded cascode: la
configurazione folded viene praticamente sempre utilizzata al posto di quella “telescopica” allo
scopo di minimizzare le cadute residue messe in gioco e quindi ottenere una dinamica
soddisfacente; inoltre non richiede addizionali circuiti di traslazione di livello.
La struttura cascode è inerentemente una struttura a larga banda in quanto gli unici nodi ad
alta resistenza sono quelli di uscita che in connessione con la capacità di carico (non rappresentata
nella figura) determinano il polo dominante su ciascun ramo, mentre gli altri nodi contribuiscono
poli a frequenza molto più alta e quindi, solitamente, sufficientemente al di sopra del prodotto
guadagno banda.
Nella struttura riportata nella figura 5.13 la rete CMF è quella già rappresentata nella figura
5.10. La corrente di retroazione derivante attraverso i transistori M12 e M13 dal confronto tra il
modo comune in uscita (prelevato tramite un partitore resistivo) e il riferimento VCM viene in questo
caso iniettata in un nodo a bassa resistenza e quindi il circuito di retroazione sul modo comune
58
AMPLIFICATORI CMOS
carica l’uscita dell’amplificatore solamente tramite i resistori R; questi ultimi potrebbero essere
sostituiti da una equivalente rete a capacità commutate.
VDD
M15
M14
VCM
M13
M11
M10
M16
M3
M4
M17
M12
I3
2
I3
2
I3
I1
I1
M18
VO1
R
M2
M1
Vi1
V i2
M7
M6
I2
M5
VO2
R
M9
M19
I2
M8
M20
VSS
Figura 5.13
Esempio di amplificatore completamente differenziale utilizzante una architettura folded
cascode.
Purché i resistori R siano di valore sufficientemente elevato il guadagno differenziale che si
ottiene è assai maggiore di quello caratterizzante la semplice struttura monostadio precedentemente
considerata: tipicamente esso risulta compreso tra qualche centinaio e qualche migliaio.
La rete di polarizzazione qui utilizzata è costituita da un partitore di tensione MOS, ma può,
ovviamente, essere sostituita con strutture più efficienti, in particolare con strutture che garantiscano
buona indipendenza dalle tensioni di alimentazione e dalla temperatura.
Si noti che le strutture “di servizio” tendono ad occupare in termini di numero di
componenti impiegato e quindi di area occupata uno spazio considerevole e spesso addirittura
prevalente rispetto alla struttura differenziale vera e propria.
Nella figura 5.14 è rappresentato un altro esempio di amplificatore con struttura folded
cascode.
Sono stati introdotti i transistori M12 e M13 che risultano polarizzati in regione ohmica.
Infatti i loro gate sono collegati con le uscite dell’amplificatore mentre i drain si trovano in
prossimità della tensione di alimentazione positiva ad una tensione imposta dalla corrente di lavoro
fissata I1+I2 , dalla tensione imposta ai gate di M10 e M11 dalla rete di polarizzazione (partitore di
tensione MOS) e dal loro dimensionamento geometrico. M12 e M13 fissano quindi il livello della
tensione in uscita dell’amplificatore.
Immaginiamo che tale livello tenda a variare, ad esempio a salire. La tensione VGS dei
transistori M12 e M13 diminuisce e quindi cresce, a corrente invariata, la loro resistenza
equivalente; perciò diminuisce la tensione VGS dei transistori M10 e M12 e, dato che ciò avviene a
corrente costante, deve aumentare, per effetto Early, la tensione ai loro capi e i loro drain scendono;
59
AMPLIFICATORI CMOS COMPLETAMENTE DIFFERENZIALI
i transistori M3 e M4 si comportano evidentemente allo stesso modo e i loro drain scendono
contrastando la variazione di livello ipotizzata in partenza.
VDD
M13
M12
VCM
I1 + I2
I1 + I2
M11
M10
M3
I1
M14
M4
M15
M16
I1
VO1
VO2
M17
M2
M1
Vi1
V i2
M6
M7
M18
I2
I2
M9
M8
M5
M19
VSS
Figura 5.14
Altro esempio di amplificatore completamente differenziale utilizzante una architettura
folded cascode.
Il guadagno d’anello di questa retroazione risulta assai elevato: è facile mostrare che esso
vale
gm 13ro13 ×gm 11ro11 ×gm 3ro 3 = mA 13 ×mA 11 ×mA 3
(per il ramo di sinistra; equivalentemente per il ramo di destra)
e risulta quindi in accordo con il guadagno differenziale pure esso elevato.
E’ questo un esempio di utilizzo nella rete di retroazione sul modo comune di transistori
MOS polarizzati in regione ohmica. La rete risulta così essere lineare almeno per segnali di ingresso
Vo1 e Vo2 non troppo ampi e quindi risponde al solo modo comune e non introduce effetti di
distorsione. Ovviamente è necessario curare attentamente l’accoppiamento dei vari transistori.
Il partitore di polarizzazione può essere dimensionato come segue.
Imponiamo ad esempio l’uguaglianza
I1 = I2
Si ha allora
æW ö
æW ö
1 æW ö
1 æW ö
÷
÷
÷
ç ÷
÷ = èçç ø
÷ = èçç ø
÷ = èçç ø
÷
÷
÷
÷
÷
çè L ø
L
2
L
2
L
8
9
5
19
æW ö
æ
ö
æ
ö
W
W
÷
çç ÷
÷ = èçç ø
÷ = ç ÷
÷
÷
÷
èL ø
L ÷13 èç L ø
12
14
60
AMPLIFICATORI CMOS
æW ö
æW ö
æW ö÷
çç ÷
çç ÷
ç
=
=
÷
÷
÷
÷
÷
èL ø
èL ø
èç L ø÷
10
11
15
æW ö
æW ö
1 æW ö
ç ÷
ç ÷
ç ÷
÷
÷
÷
÷ = èç L ø
÷ = 2 èç L ø
÷
çè L ø
3
4
16
æW ö
æ
ö
æ
ö
W
1
W
ç ÷
ç ÷
ç ÷
÷
÷
÷
÷ = èç L ø
÷ = 2 èç L ø
÷
çè L ø
6
7
18
Il rapporto di forma di M17 va poi scelto in maniera da determinare la corrente con cui si
vuole polarizzare il partitore di tensione di polarizzazione. Per ragioni di dissipazione tale corrente
va scelta sufficientemente piccola, compatibilmente con problemi di occupazione di area e risposta
in frequenza.
Le strutture a due stadi comunemente utilizzate si possono facilmente derivare dalle
analoghe strutture single ended trasformandole in maniera sostanzialmente ovvia. Ad esempio a un
primo stadio come quello considerato all’inizio della nostra trattazione (figura 5.2) si possono
aggiungere due stadi (uno per ciascuna sua uscita) in configurazione source comune. La stessa
configurazione si può utilizzare, per ottenere un guadagno ancora più elevato, con un primo stadio
cascode.
Seguono alcune considerazione applicabili in generale agli amplificatori completamente
differenziali.
Il guadagno dell’amplificatore differenziale e la sua banda (espressa usualmente in termini
di prodotto guadagno banda) sono chiaramente definiti in relazione all’applicazione cui
l’amplificatore è destinato. L’amplificatore viene solitamente utilizzato in configurazione
retroazionata e quindi la sua banda coincide in prima approssimazione con la frequenza di guadagno
unitario dell’anello di retroazione. L’amplificatore va quindi progettato in modo che tale frequenza
sia congruente con la destinazione d’uso. Anche il guadagno richiesto dipende dall’applicazione
prevista.
La situazione è, da questo punto di vista, assai meno bene definita per quanto riguarda
l’anello di retroazione sul modo comune. In un sistema perfettamente bilanciato il modo comune
non dovrebbe possedere componenti in alternata e pertanto la banda della rete di retroazione CMF
avrebbe poca importanza, mentre importante ne sarebbe pur sempre il guadagno. Nella realtà sono
invece presenti componenti in alternata del modo comune per vari motivi: componenti già
contenute nel segnale di ingresso; disturbi e rumore introdotti dalle alimentazioni, dal substrato,
ecc; sbilanciamenti interni del sistema (accoppiamento non perfetto tra determinati componenti) che
determinano una parziale conversione da modo comune a modo differenziale; e così via. Tali
componenti causano limitazioni della dinamica differenziale (che deve lasciare spazio a quella,
sovrapposta, di modo comune), inquinano la risposta dell’amplificatore, si propagano a strutture
successive e vanno quindi rigettate il più possibile entro tutta la banda del segnale utile cioè la
banda del percorso differenziale. Una regola spesso adottata, ma difficile di fatto da osservare, è
quella di progettare il sistema in modo che la frequenza di guadagno unitario dell’anello di
retroazione sul modo comune e quella dell’anello di retroazione sul modo differenziale siano il più
possibile vicine. Ciò risulta difficile in quanto solitamente la retroazione sul modo comune, a causa
delle strutture circuitali che utilizza e il numero di componenti impiegati, presenta poli secondari in
numero maggiore e di peso maggiore in termini di margine di fase.
Per ottimizzare la compatibilità tra la rete CMF e l’amplificatore differenziale è quindi
generalmente da considerarsi un buon approccio quello di utilizzare il più possibile le stesse
strutture circuitali per il percorso di modo comune e quello di modo differenziale. Tale approccio
riduce anche il numero totale dei componenti impiegati.
Nei sistemi a due stadi ambedue gli anelli vanno compensati in frequenza, generalmente alla
Miller. Nella trattazione precedente tali compensazioni non sono state considerate.
61
AMPLIFICATORI CMOS COMPLETAMENTE DIFFERENZIALI
62