")
Capitolo 6 (ultimo aggiornamento 31/05/04)
6.1 Macchine sincrone generalità
La macchina sincrona è un particolare tipo di macchina elettrica rotante che ha
velocità di rotazione strettamente correlata alla frequenza delle grandezze elettriche
sinusoidali ai suoi morsetti.
Viene chiamata ALTERNATORE, se funziona da generatore, MOTORE
SINCRONO se funziona da motore; la sua applicazione più diffusa è come
alternatore perchè come motore presenta problemi di avviamento.
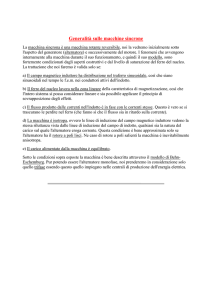
Fig.6.1 Schema di una macchina a poli salienti
La macchina sincrona è composta da un rotore e da uno statore. Il rotore può essere:
1) a Poli salienti cioè costituito da un albero di acciaio massiccio su cui sono
calettati i poli (vedi figure 6.1 e 6.2);
2) Liscio, cioè da un "fucinato" solcato da cave longitudinali alloggianti i conduttori
di induttore, come mostrato nella figura 6.3a e 6.3b.
Lo statore ha la stessa forma dello statore della macchina asincrona ed è laminato.
1
Fig.6.2
I conduttori di indotto e di induttore sono in rame, isolati tra loro e rispetto alle parti
in ferro.
Fig.6.3a: Spaccato di un tubo alternatore
2
Fig.6.3b
6.2 Valori nominali
Esistono valori nominali di funzionamento delle macchine sincrone per cui si hanno
livelli ottimali di operatività:
Pn
potenza nominale kVA, kW (*)
E n , U n tensione nominale di indotto in ac V
E n :tensione di fase; U n :tensione concatenata
In
corrente nominale di indotto in ac A
fn
frequenza nominale Hz
Ie
corrente di eccitazione in dc A
Ue
tensione di eccitazione in dc V
n
velocità nominale di rotazione giri/minuto primo
Cn
coppia nominale all’albero Nm
(*) Nel caso degli alternatori la potenza nominale indica la potenza elettrica
apparente erogata ed è espressa in kVA, nel caso dei motori indica la potenza resa
all’albero, ed è espressa in kW.
3
Per un alternatore valgono le seguenti relazioni;
– monofase
– trifase
Pn EnIn
Pn 3 UnIn
6. 1
6. 2
Per i motori sincroni:
P n C n 2 n
60
6. 3
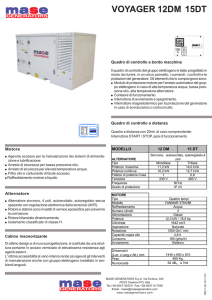
6.3 Forza elettromotrice indotta
Fig.6.4
Induzione al traferro nelle macchine a poli salienti
Con riferimento alla figura 6.4, nell’ alternatore trifase con induttore a poli salienti,
ciascuna delle 2p bobine di eccitazione di N e spire è percorsa da una corrente
continua (eccitazione) I e e produce una forza magnetomotrice pari a N e I e .
Ovviamente essendo le bobine uguali tra loro, le 2p* f.m.m. sono uguali in modulo e
di segno opposto e producono pertanto 2p tubi di flusso di induzione disposti
simmetricamente. In un tubo di flusso, il percorso chiuso di ciascuna linea di flusso è
caratterizzato da due tratti nel traferro e da due tratti nel ferro ( uno nel ferro di
rotore e l’altro nel ferro di statore).
(*) nota p numero di coppie polari e 2pnumero di poli
Considerando che la permeabilità del ferro è molto maggiore di quella del traferro, si
può ipotizzare, in prima approssimazione, che la caduta di potenziale magnetico nel
ferro sia trascurabile e vale perciò la relazione:
4
Bd r
NeIe
6. 4
0
con 0 permeabilità magnetica dell’aria e d r spessore del traferro in
corrispondenza della scarpa polare (variabile con l’ascissa angolare r ).
Hd
Dalla relazione 6.4 si ottiene la componente radiale dell’induzione al traferro:
B r B M sinp r
6. 5
ove B M è il valore massimo che si presenta in corrispondenza della parte centrale di
ciascun polo saliente, detto asse di simmetria (asse polare in figura 6.4).
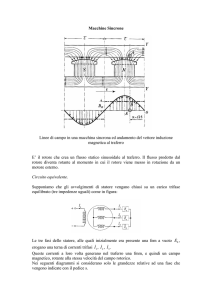
Induzione al traferro nelle macchine a rotore liscio
Con riferimento alla figura 6.5, si assume anche in questo caso che la permeabilità
del ferro sia molto grande, quindi la tensione magnetica risulta dalla somma dei
contributi relativi ai due tratti in aria uguali tra loro (la lunghezza dei due tratti del
traferro non varia con r ), essendo il rotore in questo caso liscio:
2Hd 2Bd
6. 6
0
ma i contributi delle varie bobine (vedi figura 6.3b) portano ad una distribuzione
spaziale B( r analoga a quella precedente ( vedi relazione 6.5).
Fig.6.5
Se il rotore, una volta eccitato, è messo in rotazione alla velocità angolare costante
2f 2n
60
indurrà una f.e.m. negli avvolgimenti di statore, che in un primo momento saranno
considerati aperti.
f.e.m. indotta in un conduttore di statore
e ci t E cM sint
6. 7
5
Valore efficace delle f.e.m. indotta in una fase
Ec kff
6. 8
Frequenza delle tensioni indotte in funzione della velocità di rotazione
pn
f
6. 9
60
f.e.m. degli avvolgimenti di indotto
Con riferimento alle figure 6.4 e 6.5 la f.e.m. indotta nelle tre fasi di statore è
indicata dalle espressioni che seguono e dal diagramma di figura 6.6.
Ē iA Ē m 17 Ē m 28
Ē iB Ē m 511 Ē m 612
6. 10
Ē iC Ē m 93 Ē m 104
Fig.6.6
e iA t
2 E i sint
e iB t 2 E i sint 2
3
e iC t 2 E i sint 4
3
6. 11
6.4 Funzionamento a vuoto
Il funzionamento a vuoto si realizza quando le correnti di indotto sono nulle, cioè
quando si presentano i seguenti casi:
1) morsetti dello statore aperti;
2 la macchina è eccitata e ruota alla velocità costante :
U0
3E
i0
6. 12
Osservando la figura 6.7 si nota che per I e 0 la f.e.m. indotta nello statore è
6
diversa da zero; infatti la E r è prodotta dal magnetismo residuo del rotore. La 6.7 è
detta caratteristica a vuoto della macchina sincrona (sia alternatore che motore).
All’aumentare della corrente di eccitazione oltre il valore I sat , l’incremento di f.e.m.
indotta è contenuto a causa della saturazione del ferro.
Fig.6.7
6.5 Funzionamento a carico dell’alternatore
Il funzionamento a carico si ottiene connettendo i morsetti di indotto (statore) o ad
una rete in regime sinusoidale o ad un carico isolato.
Nel caso in cui la macchina sia chiusa su un carico trifase isolato dalla rete,
circoleranno tre correnti sostenute dalle tre tensioni a vuoto ( sistema trifase
simmetrico):
2 E 0 sint
2
7
e 20 t 2 E 0 sint
6. 13
6
e 30 t 2 E 0 sint 11
6
i 1 t 2 I sint
2
i 2 t 2 I sint 7
6. 14
6
i 3 t 2 I sint 11
6
La fase è riferita allo sfasamento temporale tra flusso induttore e f.e.m.
2
indotta.
e 10 t
In funzione del valore di (sfasamento dovuto al carico) si verificherà che il campo
magnetico rotante prodotto dalle tre correnti circolanti nello statore (isofrequenziale
con quello di rotore), genererà al traferro: una distorsione, un rinforzo o una
7
smagnetizzazione; in figura 6.8 sono riportati tre casi limite: il carico puramente
resistivo, puramente capacitivo e puramente induttivo.
Fig.6.8
Se il funzionamento è in parallelo su una rete in tensione, allora la macchina produce
energia per integrare il fabbisogno elettrico. L’inserimento in parallelo su una rete in
tensione non è così immediato come l’allaccio ad un carico isolato. Per questo
motivo i gruppi di soccorso (Gruppo Elettrogeno) intervengono sempre dopo che è
avvenuto il black out e vengono disinseriti prima del ripristino del carico alla rete, al
ritorno della tensione.
8
6.6 Schemi equivalenti
La presenza all’interno della macchina di due campi magnetici rotanti alla stessa
velocità (fermi l’uno rispetto all’altro, sia pure con un certo sfasamento può
essere tenuta in conto dal circuito equivalente di figura 6.9, nel quale R è la
resistenza degli avvolgimenti di statore e X s è la reattanza "sincrona".
Fig.6.9
Fig.6.10
Nella figura 6.9 è rappresentato lo schema equivalente della macchina trifase, mentre
nella figura 6.10 è rappresentato lo schema equivalente monofase, avendo ipotizzato
un comportamento simmetrico ed equilibrato della macchina.
La reattanza sincrona tiene conto di diversi effetti; essa può essere misurata con la
seguente prova a vuoto e in corto circuito.
Fig.6.11
Dalla prova a vuoto, con valori discreti di corrente di eccitazione I ei , si ricava una
serie di valori di f.e.m. indotta E 0i ; chiudendo in corto, nelle stesse condizioni, si
legge un set di valori di corrente I icc per cui si può costruire, per punti, la curva
9
riportata nella figura 6.12, che fornisce il valore del modulo di Ż s R jX s in
funzione della corrente di eccitazione.
ZS
E0
I cc
Fig.6.12
Negli alternatori generalmente R X s per cui, in prima approssimazione, lo
schema monofase equivalente è:
Fig.13
10
6.7 Funzionamento della macchina in parallelo ad una rete
(alternatore e/o motore)
L’inserimento di un alternatore in parallelo su una rete in tensione, non è
un’operazione immediata, anche se è facilitata da dispositivi automatici
(sincronoscopio). Il problema infatti consiste nel raggiungimento delle seguenti
caratteristiche:
– stesso valore efficace di tensione tra le fasi
– stessa pulsazione delle tensioni
– annullamento dello sfasamento angolare , (vedi figura6.15)tra i vettori Ē 0 e V
(rete) per evitare un pericoloso colpo di correnteall’atto della chiusura
dell’alternatore sulla rete.
Fig.6.14
Dalla figura 6.14, partendo dalle condizioni di parallelo, si potrà:
a) incrementare la potenza meccanica fornita all’albero dell’alternatore senza
modificare la corrente di eccitazione; in questo caso la potenza erogata
dall’alternatore sulla rete (vedi figura 6.15) sarà pari a:
P 3E 0 I cos /2
6. 15
ovvero inserire una coppia resistente (funzionamento come motore) (vedi figura
6.16) per cui la relazione 6.15 rappresenta la potenza elettrica assorbita dalla rete.
Fig.6.15
11
Fig.6.16
b) incrementare o ridurre la corrente di eccitazione, senza modificare la potenza
fornita o richiesta all’albero della macchina sincrona. Con riferimento alle figure
6.17 e 6.18, nel primo caso la macchina eroga potenza reattiva e nel secondo assorbe
potenza reattiva.
Nella pratica, in generale, si modifica sia la coppia che l’eccitazione, come riportato,
nel caso di un alternatore, nella figura 6.19.
Fig.6.19
La potenza erogata dall’alternatore è pari a:
12
P 3E 0 I cos
6. 16
Osservando la figura 6.19 la relazione 6.16 si può modificare come segue:
3E 0 V sin
6. 17
P
Xs
Nel caso di un motore, il diagramma 6.19, si modifica come indicato nella figura
6.20:
Fig.6.20
, nel generatore invece era
Il vettore Ē 0 è, ovviamente, in ritardo rispetto al vettore V
in anticipo. Poichè la potenza meccanica erogata dal motore rimane la stessa, le tre
configurazioni (I, I , I stanno a rappresentare la possibilità offerta dal motore
sincrono di non assorbire potenza reattiva dalla rete (I), di generare potenza reattiva
(I ) (condensatore rotante) o di assorbire potenza reattiva dalla rete (I ) come una
normale macchina asincrona.
Nel primo caso il motore è visto dalla rete come un carico resistivo (I), nel secondo
(I ) come un carico resistivo-capacitivo e nel terzo (I ) come un carico
resistivo-induttivo.
Quindi il motore sincrono può rifasare i carichi elettrici presenti nel nodo da cui trae
l’alimentazione, senza dover ricorrere a banchi di condensatori statici.
Un motore funzionante a vuoto sovraeccitato si chiama "compensatore sincrono o
condensatore rotante".
6.7.1 La stabilità della macchina sincrona
Dalla relazione 6.17 si nota subito che, con corrente di eccitazione costante, non si
può incrementare troppo la coppia motrice/resistente, altrimenti il sin tenderebbe ad
1, con conseguente andata in fuga della macchina se questa è un alternatore o perdita
di passo se è un motore.
13
6.8 Ulteriori notizie sulle macchine sincrone
6.8.1 Avviamento
Il motore sincrono sviluppa coppia solo se è al sincronismo, per cui deve essere
avviato:
1) ricorrendo ad un motore ausiliario di lancio;
2) trasformando la macchina in un motore asincrono a doppia gabbia.
Le due gabbie sono rappresentate rispettivamente dall’avvolgimento di eccitazione
(chiuso in corto o su una resistenza) e da una gabbia di scoiattolo (dumper winding)
posta nel rotore. Una volta raggiunta la velocità prossima al sincronismo, si lancia
corrente continua nell’avvolgimento di eccitazione, provocando la sincronizzazione
del rotore. La gabbia di scoiattolo non interagisce con la dinamica della macchina al
sincronismo, in quanto non sono indotte f.e.m. nelle sue sbarre. Durante eventuali
transitori (rallentamento o accelerazioni) la gabbia opera come elemento di
smorzamento delle pendolazioni, contribuendo alla stabilità della macchina stessa.
6.8.2 Motori lineari
Per comprendere come nasce un motore sincrono lineare si può pensare, idealmente,
di far tendere il raggio del rotore all’infinito: la macchina assumerebbe, allora, una
geometria lineare (non più cilindrica). I motori lineari trovano largo impiego nella
trazione ad alta velocità ( Maglev treni monorotaia) e nella movimentazione dei
"pezzi" nella fabbrica robotizzata.
14
")