Università degli studi di Perugia
Facoltà di Ingegneria
Corso di Laurea Specialistica in Ingegneria
Elettronica
Analisi di modelli avanzati di
generazione ottica per simulazione 3D
di sensori CMOS a matrice di pixel
attivi
Laureando
Relatore
Gabriele Giannoni
Ing. Daniele Passeri
Anno accademico 2009-2010
Indice
Ringraziamenti
3
Introduzione
4
1 Sensori a pixel attivi (APS)
1.1 I semiconduttori . . . . . .
1.1.1 Il drogaggio . . . .
1.2 Il fotodiodo . . . . . . . .
1.3 I sensori a pixel attivi . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2 Strumenti di simulazione
2.1 Il pacchetto Sentaurus . . . . . . .
2.2 Sentaurus Structure Editor . . . . .
2.3 Sentaurus Process . . . . . . . . . .
2.4 SDevice . . . . . . . . . . . . . . .
2.5 Inspect . . . . . . . . . . . . . . . .
2.6 Tecplot . . . . . . . . . . . . . . . .
2.7 Il modello Optical Beam Absorption
2.8 Il cluster di calcolo dell’INFN . . .
3 Preparazione alle simulazioni
3.1 Costruzione della struttura .
3.2 Simulazione quasistazionaria
3.3 Simulazione tempo-variante
3.4 Visualizzazione dei risultati
.
.
.
.
4 Analisi dei risultati
4.1 Struttura “small” . . . . . . .
4.2 Struttura “small” completa .
4.3 Struttura “large” . . . . . . .
4.4 Variazione dello stimolo ottico
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6
6
8
11
15
.
.
.
.
.
.
.
.
20
20
21
24
25
31
32
32
35
.
.
.
.
37
37
42
45
48
.
.
.
.
55
55
66
72
81
4.4.1
4.4.2
4.4.3
4.4.4
4.4.5
Prima serie (λ1 = 783 nm) . . . .
Seconda serie (λ2 = 407 nm) . . .
Terza serie (λ3 = 573 nm) . . . .
Quarta serie (λ4 = 1058 nm) . . .
Confronto tra le diverse lunghezze
. . . . .
. . . . .
. . . . .
. . . . .
d’onda .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
82
83
84
85
87
Conclusioni
89
Bibliografia
91
2
Ringraziamenti
Vorrei innanzitutto ringraziare il Prof. Daniele Passeri per la sua disponibilità e per
il suo aiuto durante tutto il percorso della tesi, vorrei poi ringraziare anche il Prof.
Leonello Servoli, l’Ing. Stefano Meroli dell’INFN di Perugia e Andrea Mencaroni che
mi hanno aiutato nell’utilizzo del cluster di calcolo.
Un ringraziamento particolare va alla mia famiglia, soprattutto i miei genitori che,
con tanti sacrifici economici e di tempo, mi hanno permesso di studiare e di poter
arrivare a questa laurea.
Voglio poi salutare tutti i miei amici (non faccio l’elenco dei nomi perchè altrimenti ne dimenticherei qualcuno) che mi hanno sostenuto e alleviato l’onere di questo
percorso di studi negli ultimi anni. Grazie davvero.
3
Introduzione
Negli ultimi anni si è assistito ad un progressivo impiego di sensori di immagine integrati
in tecnologia CMOS a scapito dei sensori CCD dati gli innegabili vantaggi, quali la
possibilità ad esempio di poter implementare uno stadio di amplificazione subito a
valle dell’elemento sensibile all’interno del singolo pixel che consente di ottenere una
sensibilità complessiva maggiore; tra gli altri motivi c’è sicuramente una ormai matura e
avanzata conoscenza della tecnologia di integrazione del silicio e la scalabilità dell’intera
architettura all’arrivo del nodo tecnologico successivo, cosa che semplifica di molto la
fase progettuale.
Questo lavoro di tesi si inquadra in un progetto che mira a realizzare dei sensori
di radiazione a pixel attivi integrati in tecnologia CMOS; tale progetto è figlio di
una collaborazione tra il Dipartimento di Ingegneria Elettronica e dell’Informazione
(DIEI) dell’Università di Perugia e l’Istituto Nazionale di Fisica Nucleare (INFN) del
Dipartimento di Fisica di Perugia.
Nel complesso del progetto possiamo individuare due aspetti prominenti nel lavoro:
le simulazioni al calcolatore (oggetto di questa tesi) e le prove sperimentali al banco
ottico. L’utilizzo di software di simulazione è diventato oramai un ausilio irrinunciabile
in un progetto di circuiti integrati; esso offre la possibilità di ridurre al minimo gli eventuali problemi in fase di realizzativa del sensore abbassando quindi i costi, nonché una
maggiore possibilità di ottimizzazione e quindi il raggiungimento di migliori prestazioni
finali.
L’utilizzo di tali strumenti di simulazione è figlio della sorprendente evoluzione che
i calcolatori hanno avuto negli ultimi decenni; con le potenze di calcolo attualmente
disponibile è possibile effettuare simulazioni sempre più accurate e vicine a quello che
è il comportamento reale. Nello specifico possiamo portare l’esempio del pacchetto
Sentaurus di Synopsys che consente di effettuare simulazioni di dispositivo di strutture
complesse sia in 2D che in 3D.
L’obiettivo di questa tesi sta è l’analisi e l’applicazione di un modello di generazione ottica per la caratterizzazione del comportamento dei sensori in risposta ad una
radiazione luminosa che li investe; a tale proposito è stato utilizzato un modello che
permette di simulare l’interazione di un (o più) fotodiodo e il fascio di fotoni che lo
4
(li) colpisce. Nell’utilizzo del modello di generazione è stato però fondamentale un preliminare studio del comportamento del simulatore al variare dello stimolo ottico, della
discretizzazione spaziale (mesh) e della discretizzazione temporale; parametri, questi,
cruciali nello sviluppo di un set di simulazioni che voglia studiare in maniera appropriata il funzionamento del sensore. Per fare ciò è stata quindi focalizzata l’attenzione
sull’elemento che si occupa di trasdurre il segnale ottico in segnale elettrico, ovvero il
fotodiodo che non è altro che una giunzione pn polarizzata inversamente.
Una volta raggiunta una sufficiente padronanza del modello di generazione è stata
poi effettuata una vasta serie di simulazioni. Questo ha richiesto ingenti risorse di
calcolo, a tal proposito è stato fondamentale lo sfruttamento del cluster di calcolo
dell’INFN, una rete di calcolatori che può gestire molteplici processi di simulazione in
parallelo.
Per presentare tale lavoro si è scelto strutturare la stesura in questo modo: nel
primo capitolo, dopo una breve introduzione sui semiconduttori, verranno illustrati
i principi di funzionamento dei sensori a pixel attivi, mettendo in evidenza il comportamento del fotodiodo in relazione alla radiazione luminosa; nel secondo capitolo
parleremo degli strumenti utilizzati nell’abito della tesi, ovvero il pacchetto software
Sentaurus; nel terzo vedremo come è stata condotta la preparazione per il set di simulazioni con la definizione della struttura e la scelta dei parametri fondamentali del
modello di generazione ottica; nel quarto capitolo andremo a parlare di serie di simulazioni effettuate su una struttura che comprende nove pixel del sensore ottico; infine,
nelle conclusioni, faremo un resoconto del lavoro per vedere in quale misura siano stati
raggiunti gli obiettivi preposti, anche alla luce del lavoro effettuato in modo parallelo
al banco ottico.
5
Capitolo 1
Sensori a pixel attivi (APS)
In questo capitolo verranno illustrati i principi di funzionamento dei rivelatori di radiazione integrati in tecnologia CMOS a pixel attivi, denominati anche APS (Active
Pixel Sensors). Dopo una breve introduzione sui semiconduttori e il modello a bande,
verrà focalizzata l’attenzione sull’elemento principale del sensore ovvero il fotodiodo,
che permette la trasduzione del segnale ottico in segnale elettrico; in particolare andremo in dettaglio sul funzionamento di una giunzione pn polarizzata inversamente.
Infine mostreremo l’architettura del generico pixel che si trova all’interno di un sensore
APS.
1.1
I semiconduttori
I semiconduttori sono materiali che presentano una resistività ρ compresa tra quelle
tipiche degli isolanti (alta) e dei conduttori (bassa). La loro importanza nell’elettronica è dovuta essenzialmente al fatto che è possibile modificarne la loro conducibilità
attraverso il drogaggio (par 1.1.1).
Per capire meglio il comportamento dei semiconduttori a livello elettronico è necessario illustrare il modello a bande di energia introdotto dalla meccanica quantistica.
La teoria ci dice che ogni elettrone ha un certo livello di energia associata permessa; in
un reticolo cristallino come quello del silicio, i livelli energetici degli elettroni formano
delle bande1 : banda di valenza e banda di conduzione (vedi fig 1.1).
Definiamo con EC il livello minimo di energia che delimita la banda di conduzione,
mentre con EV il livello massimo della banda di valenza. La distanza tra le due bande,
ovvero la quantità EC − EV , è detta bandgap (EG ) o gap energetico; in questa zona
non ci sono livelli di energia permessi, per questo è anche detta “banda proibita”. Ogni
1
in realtà si ha un insieme discreto di livelli energetici molto vicini tra loro che nel complesso può
essere assimilato ad una banda continua.
6
semiconduttore ha un valore di bandgap caratteristico, ad esempio per il silicio è pari
a 1, 12eV @T = 300K.
Figura 1.1: Disposizione delle bande di energia per un semiconduttore.
Una grandezza fondamentale nell’elttronica dello stato solido è sicuramente la mobilità µ dei portatori di carica che è direttamente collegata alla conducibilità del materiale. La mobilità non è altro che un parametro che descrive la capacità di un portatore
di muoversi all’interno del materiale, nel caso del silicio all’interno del reticolo cristallino; si intuisce come più alta sarà la mobilità e più grande sarà la conducibilità (σ),
basti vedere l’eq. 1.1 che indica una proporzionalità diretta tra le due grandezze2 .
σ = qnµ
(1.1)
dove:
q è la carica dell’elettrone (1, 602 · 10−19 C);
n è la concentrazione dei portatori all’interno del mezzo in cm−3 .
Per capire meglio l’importanza della mobilità dobbiamo avere ben in mente un’altra
equazione fondamentale: la legge di Ohm in forma locale (vedi eq. 1.2); essa regola la
conduzione elettrica in un generico mezzo.
J =σ·E
dove:
2
vedi [1]
7
(1.2)
J è la densità di corrente in A/cm2 ;
E è il campo elettrico in V /cm.
1.1.1
Il drogaggio
Come abbiamo già detto il modo con cui si varia la conducibilità di un semiconduttore è
il drogaggio. Drogare un semiconduttore significa introdurre delle impurità all’interno
di esso; queste non sono altro che atomi di specie differente dal materiale intrinseco.
Possiamo avere due tipi di drogaggio: di tipo n o di tipo p.
Se teniamo sempre come esempio il silicio, otterremo un drogaggio di tipo n introducendo elementi che appartengono al V gruppo della tavola periodica, mentre per
l’altro tipo dovremo utilizzare elementi del III gruppo. Vediamo perchè. Sappiamo che
il silicio, come elemento del IV gruppo ha 4 elettroni di valenza; se leghiamo un atomo
di silicio con uno di fosforo (5 elettroni di valenza) il risultato sarà che un elettrone (del
fosforo) rimarrà non legato (vedi fig 1.2) e sarà quindi disponibile per la conduzione
elettrica e l’atomo di fosforo sarà quindi ionizzato (positivamente). Se studiamo il diagramma a bande del silicio di tipo n (vedi fig 1.3) vediamo che si formano dei livelli di
energia permessi (pieni), all’interno della banda proibita, prossimi a EC ; ciò significa
che basterà un piccolo contributo di energia affinchè gli elettroni associati a tali livelli
possano “saltare” in banda di conduzione.
Figura 1.2: Reticolo cristallino del silicio in presenza di specie droganti di tipo n (fosforo
a sinistra) e di tipo p (boro a destra)
Per ottenere del silicio drogato di tipo p dovremo utilizzare degli atomi di boro
ad esempio; come elemento del III gruppo, il boro possiede 3 elettroni di valenza.
Sostituendo un atomo di silicio nel reticolo cristallino, il boro avrà un legame in meno
(dato l’elettrone di valenza in meno); questa “mancanza” è detta lacuna. Un elettrone
impegnato in un legame covalente in un atomo adiacente a quello di boro potrà prendere
8
il posto nel legame con il boro ma lasciando a sua volta una lacuna nell’atomo coinvolto
in precedenza; si innesca quindi un fenomeno in cui si ha lo spostamento di elettroni
verso una direzione, o equivalentemente una lacuna che si muove in senso opposto, ecco
perchè può essere assimilabile ad una carica positiva.
Figura 1.3: Struttra delle bande di energia del silicio in presenza di drogante di tipo
donatore (n).
Figura 1.4: Struttra delle bande di energia del silicio in presenza di drogante di tipo
accettore (p).
Definiamo ora la densità di portatori all’interno di un semiconduttore come numero
di portatori per unità di volume (cm−3 ): n per gli elettroni e p per le lacune. Nel silicio
intrinseco (non drogato) avremo che:
n=p
(1.3)
Se facciamo il prodotto tra queste due quantità otteniamo:
np = ni 2
(1.4)
È importante sottolineare come la grandezza ni 2 rimanga costante se supponiamo
di essere all’equilibrio termodinamico. Se invece abbiamo un semiconduttore drogato
avremo che l’eq 1.3 sarà sbilanciata (ma non la 1.4) e quindi perderà la sua validità:
in un semiconduttore di tipo n avremo che n > p mentre in un semiconduttore di
tipo p avremo che n < p. Vediamo ora cosa succede alla mobilità nel caso di un
semiconduttore estrinseco per vedere come il processo del drogaggio sia direttamente
collegato alla conducibilità del mezzo.
9
Possiamo innanzitutto distinguere tra due mobilità, date dai due diversi portatori
di cariche: µn (per gli elettroni) e µp per le lacune; riscriviamo quindi l’eq 1.1 in questo
modo:
σ = q(nµn + pµp )
(1.5)
Definiamo inoltre con ND e NA le concentrazioni di atomi droganti all’interno del
semiconduttore di tipo n e p rispetivamente3 . La carica complessiva all’interno del semiconduttore deve essere pari a 0, ovvero la quantità di cariche positive deve eguagliare
la quantità di cariche negative (neutralità della carica), perciò avremo che:
q(p + ND − n − NA ) = 0
(1.6)
Essendo in un semiconduttore drogato però possiamo dire di più. Sappiamo che
concentrazione tipiche di atomi droganti che vengono utilizzate nei processi odierni
possono oscillare tra 1013 cm−3 e 1019 cm−3 , ciò significa quindi che in un semiconduttore
di tipo n, avremo che µn n µp p, o viceversa, in un semiconduttore di tipo p µn n µp p; questo porta ad operare alcune approssimazioni all’eq 1.5:
σ ≈ qnµn ≈ qµn (ND − NA )
(1.7)
σ ≈ qP µP ≈ qµP (NA − ND )
(1.8)
Le eq 1.7 e 1.8 legano quindi direttamente la concentrazione di specie drogante
con la conducibilità del semiconduttore. Questo ci porterebbe a pensare come sia,
in teoria, possibile aumentare la conducibilità senza limiti, ma nella pratica questo
non è vero. Dobbiamo infatti tenere conto di come la mobilità, all’aumentare della
concentrazione di specie drogante, diminuisca; questo è intuibile anche considerando
come, all’aumentare di impurità nel reticolo cristallino l’elettrone abbia più difficoltà
nel muoversi all’interno di esso, determinando quindi un calo della sua mobilità.
Altro fenomeno che si ha nel caso di semiconduttori drogati è quello della corrente
di diffusione. Nello studio del comportamento elettronico a livello microscopico a volte
è utile e facile pensare di avere una materiale drogato uniformemente ma nella maggior
parte dei casi questo non si verifica; ci si trova quindi con delle zone che risultano più
drogate di altre. In questo caso succede che i portatori liberi che stanno nelle zone a
maggiore concentrazione di drogante si muovono verso le zone a minore concentrazione
creando una corrente di diffusione. Supponendo, per semplicità, di muoverci lungo una
sola coordinata spaziale avremo che:
3
“D” sta per atomi donatori e “A” sta per atomi accettori.
10
Jn = qDn
∂n
∂x
(1.9)
∂p
(1.10)
∂x
nel caso di semiconduttore di tipo n e tipo p rispettivamente.
I parametri Dn,p sono i coefficienti di diffusione che sono legati alla mobilità tramite
la relazione di Einstein4 Riprendendo le considerazioni fatte in precedenza possiamo
scrivere le equazioni che descrivono la corrente complessiva che attraversa il mezzo,
ovvero le equazioni di drift-diffusion:
Jp = −qDp
1.2
Jn = qµn nE + qDn
∂n
∂x
(1.11)
Jp = qµp pE − qDp
∂p
∂x
(1.12)
Il fotodiodo
L’elemento fondamentale in un sensore integrato a pixel attvi è il fotodiodo, che è in
grado di trasformare l’energia luminosa in energia elettrica. La realizzazione di tale
elemento è possibile creando una giunzione pn; ciò è possbile farlo semplicemente affiancando due regioni di materiale drogate in modo opposto. Nel fare questa operazione
si ha un fenomeno di diffusione dei portatori da un parte all’altra: gli elettroni si
sposteranno dalla zona n alla zona p, viceversa per le lacune. Questo spostamento lascia, nella zona della giunzione, un certo numero di cariche fisse; dalla parte della zona
p avremo una regione di carica negativa mentre dall’altra parte avremo una regione di
carica postiva (vedi fig 1.5).
Figura 1.5: Schematizzazione semplificata di una giunzione pn (con l’ipotesi di
giunzione brusca).
4
Dn,p =
kT
q
µn,p dove k è la costante di Boltzmann.
11
Tale situazione determina una differenza di potenziale e quindi l’instaurarsi di un
campo elettostatico5 di built-in; è importante sottolineare che questo campo ha un
massimo posto proprio nel punto di giunzione tra le due differenti zone di drogaggio.
La regione di spazio che comprende le due zone che sono popolate da cariche fisse
prende il nome di “regione svuotata”, data l’assenza di cariche mobili.
Figura 1.6: Andamenti lungo la coordinata spaziale x della densità di carica ρ, del
campo elettrico E e del potenziale elttrostatico V . Nel semiasse negativo delle x
abbiamo la regione di tipo p mentre nel semiasse positivo la regione di tipo n; le linee
tratteggiate delimitano le estremità della regione svuotata all’interno delle due zone.
Per comprendere meglio il funzionamento di un diodo a giunzione pn è necessario
soffermarsi su alcuni aspetti; vediamo di risalire al potenziale elettrostatico partendo
dalla densità spaziale di carica presente nel semiconduttore.
Se vediamo la fig 1.6 notiamo come, nella parte di regione svuotata che sta nella
zona p, si ha una densità di carica (negativa) pari a −qNA mentre dall’altra parte
(nella zona di tipo n) avremo una densità di carica positiva pari a +qND . Sappiamo,
dall’equazione di continuità dela carica, che il campo elettrico è legato alla densità di
carica ρ tramite una relazione di questo tipo:
5
il campo elettrico è diretto dalla zona n verso la zona di tipo p
12
∇·E=
ρ
0
(1.13)
dove 0 è la costante dielettrica.
Ricaviamo quindi il campo elettrico dall’eq 1.13 supponendo di lavorare in una sola
dimensione (x); avremo quindi che E è pari all’integrale di ρ a meno di un fattore
0 . Integrando quindi otteniamo un andamento a triangolo con un picco verso il basso
localizzato nell’origine, ovvero al punto di giunzione tra le due zone. Rimane ora da
ricavare il potenziale elettrostatico; ciò è possibile farlo partendo dal campo elettrico6
tramite un’altra operazione di integrazione e un cambiamento di segno, otteniamo cosı̀
l’andamento (qualitativo) del potenziale all’interno del diodo.
Tutto quello che è stato detto finora è vaildo nel caso in cui non venga applicata
nessuna differenza di potenziale ai capi della giunzione, ma se immaginiamo di montare
due contatti ohmici alle estremità delle due zone di opposto drogaggio possiamo vedere
cosa succede se imponiamo una tensione al nostro diodo. Chiamiamo anodo il contatto
della zona p e catodo il contatto della zona n.
Nel caso di una tensione v positiva (condizione di polarizzazione diretta) avremo che
la barriera di potenziale sarà abbassata permettendo quindi agli elettroni e alle lacune di
condurre; mentre una tensione v negativa (polarizzazione inversa) aumenterebbe questa
barriera di potenziale rendendo più difficile la conduzione all’interno della giunzione pn.
L’imposizione di una differenza di potenziale, non solo ha ripercussioni sulla corrente
che scorre nel diodo ma influisce anche sulla larghezza della regione svuotata (vedi eq.
1.14).
wn,p =
v
1 u
u 2Si (ψB0 + | v |)
ND,A
t
q
1
ND
+
⇒ w = wn + wp
1
NA
[m]
(1.14)
(1.15)
dove:
w è proprio la larghezza totale della regione svuotata [m]
wn è la larghezza della regione svuotata dalla parte della zona drogata n [m]
wp è la larghezza della regione svuotata dalla parte della zona drogata p [m]
è la costante dielettrica relativa del silicio (che vale 11,8)
ψB0 è il potenziale di built-in della giunzione [V]
Come vediamo dalla formula, se siamo in polarizzazione inversa avremo che la regione svuotata si allargherà, mentre nel caso opposto essà verrà ristretta; inoltre è
6
sappiamo che E = −∇V
13
possibile notare come le larghezze wn e wp dipendano fortemente da ND e NA rispettivamente, avremo quindi che la regione svuotata sarà più piccola dalla parte in cui il
drogaggio è più alto.
Entrando ora nel vivo della trattazione che riguarda il fotodiodo, o fotorivelatore che
dir si voglia, vediamo innanzitutto qual’è il meccanismo di interazione tra la radiazione
luminosa e un semiconduttore e come è possibile quindi legare uno stimolo ottico al
passaggio di corrente. Dalla meccanica quantistica sappiamo che un fotone di frequenza
ν ha un energia associata pari a E = hν (Legge di Planck); ricordando anche che ν = λc
dove c è la velocità della luce e λ è la lunghezza d’onda.
Quando un fotone colpisce il fotodiodo, se ha abbstanza energia può far si che
un elettrone passi dalla banda di valenza alla banda di conduzione, generando quindi
una coppia elettrone-lacuna. Ovviamente nel caso generale avremo un certa quatità di
fotoni che può quindi generare un certo numero di coppie, facendo rilevare un passaggio
di corrente al’interno del fotodiodo e una conseguente diminuzione della tensione ai capi
dello stesso.
L’energia minima che serve al fotone affinchè ci sia generazione di coppie elettrone
lacuna è quella pari all’energy gap EG del materiale che stiamo utilizzando per rivelare
la radiazione luminosa.
La scelta di polarizzare la giunzione in inversa ha diversi motivi, tra i quali c’è quello
di attutire il fenomeno della ricombinazione delle cariche. Nei semiconduttori le coppie
elettrone-lacuna possono subire una effetto per cui esse non sono più disponibili per la
conduzione elettrica; nel caso specifico di un dispositivo fotorivelatore è certamamente
fondamentale raccogliere quante più carcihe possibili dalla generazione di coppie dovuta
all’incidenza di una radiazione luminosa, è chiaro quindi come sia importante cercare
di contrastare, quanto possibile, la ricombinazione.
Per fare ciò occorre avere una forza che sia in grado di raccogliere le cariche e
trasportarle verso i contatti per poter avere poi una lettura all’uscita degli stadi di
amplificazione e indirizzamento del sensore; la forza in questione può essere applicata
tramite il campo elettrostatico della giunzione pn. Applicando una tensione negativa
tra anodo e catodo del diodo si fa in modo che innanzitutto scorra la minima quantità
di corrente7 nel periodo in cui non si ha radiazione luminosa incidente; si ha poi un
aumento del campo elettrico nella giunzione che consente di raccogliere più velocemente
le cariche prima che esse ricombinino.
Si può quindi già intuire come la regione svuotata, zona in cui risiede il massimo del
campo elettrico, sia il luogo più adatto alla raccolta di cariche; allontanandoci infatti
da tale zona la capacità di raccoltà diminuirà costantemente fino ad azzerarsi se siamo
molto distanti.
7
questa corrente è chiamata “corrente di buio”
14
Solitamente i fotodiodi utilizzati nei sensori APS intergati in tecnologia CMOS
vengono realizzati utilizzando un substrato di tipo p consentendo poi l’utilizzo di soli
transistori nMOS; ciò cosituisce un grande vantaggio in quanto si ha una minore occupazione di area nel wafer di silicio e una maggiore semplicità realizzativa in fase di
processo.
1.3
I sensori a pixel attivi
Negli ultimi anni, nel settore dei sensori di immagine, si è assistito ad un grande cambiamento, dovuto in gran parte alla straordinaria evoluzione nell’ambito delle tecniche
di integrazione elettronica, che hanno visto il silicio come materiale protagonista.
Mano a mano i sensori a pixel attivi integrati in tecnologia CMOS hanno rimpiazzato i vecchi predecessori CCD (Charge Coupled Device) apportando numerevoli vantaggi. L’idea che sta alla base di un sensore con questa architettura è quella di avere una
sruttura ripetitiva, ovvero un grande numero di celle microscopiche, ognuna delle quali
ha al suo interno un dispositivo fotorivelatore e un circuito intorno ad esso che può essere in grado di amplificare localmente il segnale luminoso trasdotto e indirizzarlo verso
un circuito di elaborazione che sarà responsabile poi di raccogliere tutte le informazioni
provenienti da tutti i pixel del sensore. L’importanza di avere una preamplificazione
praticamente subito a valle della fotorivelazione è cruciale in quanto minimizza gli effetti di rumore che andrebbero a degradare il segnale utile e comprometterebbero in
modo significativo le prestazioni del sensore.
Figura 1.7: Architettura di base di un sensore di radiazione a pixe attivi (APS); notare
la disposizione dei pixel secondo il metodo di Bayer.
In fig 1.7 è raffigurata l’architettura, in modo semplificato, attraverso un diagramma
a blocchi che contiene le parti principali di un generico sensore a matrice di pixel;
come si può notare è presente un pattern ovvero una trama precisa di celle sensibili
15
ad un certo tipo di colore. In generale ogni sensore ottico, o quantomeno la grande
maggioranza, trasduce il segnale ottico suddividendolo in 3 componenti colore: rosso
(R), verde (G) e blu (B); le soluzioni che si possono adottare a questo punto sono
due. La prima prevede di ricevere con ogni pixel le tre componenti del segnale; questo
prevede l’utilizzo di 3 strati di filtraggio ottico nella parte superiore di ogni pixel della
matrice, rendendo la realizzazione piuttosto costosa8 .
Figura 1.8: Confronto tra le due implementazioni di un sensore di immagine
L’altra soluzione prevede che ogni pixel sia dedicato a convertire il segnale ottico
in una singola componente secondo una trama che è stata proposta da Bayer (vedi
fig.) la quale prevede una predominanza nella presenza di celle dedicate al verde, ciò
è giustificato dal fatto che l’occhio umano è più sensibile a percepire dettagli di tale
colore. Per poter sopperire alla mancanza delle altre due componenti si utilizza uno
stratagemma che consiste nello stimare, tramite interpolazione dalle celle adiacente,
i valori ipotetici che si avrebbero. Tale soluzione, che è poi quella più utilizzata, ha
ovviamente tra i suoi vantaggi il fatto di avere una minore complessità per quanto
riguarda la costruzione del singolo pixel dato che sarà necessario avere un singolo filtro
per ogni cella; con la prima soluzione è inoltre necessario avere tre uscite per il segnale
da ogni pixel mentre nel caso del metodo proposto da Bayer ne servirà soltanto una, a
fronte di una corretta implementazione dell’interpolazione nel circuito di elaborazione
a valle della matrice attiva.
Per semplicità pensiamo di avere un singolo pixel che gestisca solo un segnale
(un sensore di immagini in bianco e nero ad esempio), andiamo all’interno di esso
e focalizziamoci sulla sua architettura.
Come si può vedere dall fig 1.9, il circuito che circonda il fotodiodo è composto
semplicemente da tre transistor. Il transistor Mrst , che ha in ingresso il segnale di
RESET, ha il compito di portare il nodo a cui è connesso il catodo del fotodiodo
8
Questi tipi di sensori sono chiamati sensori Foveon
16
Figura 1.9: Schematico elettrico del circuito del singolo pixel
ad un valore prestabilito di tensione che può essere dell’ordine dei 1,7 V. Il segnale di
RESET, solitamente, ha un andamento peeriodico; ciò è necessario in quanto altrimenti
la tensione del catodo, al variare del tempo, si abbasserebbe a causa delle capacità
parassite dei MOSFET del circuito. Nel momento in cui il segnale di RESET è alto
il nodo si caricherà al valore di tensione desiderato, quando è basso il fotodiodo sarà
pronto a rivelare una possibile incidenza di radiazione luminosa.
Il transistor Msf , in configurazione source follower, opera da buffer in tensione per
presentare il segnale al selettore di riga (il transistorMsel ) disaccoppiando l’uscita dal
fotodiodo stesso.
In fig 1.10 è possibile osservare l’andamento della tensione del catodo del fotodiodo
in funzione del tempo; nel primo tratto vediamo come la tensione scenda lentamente e
poi come sia riportata al valore iniziale dal segnale di reset, ciò significa che non è stata
rilevata alcuna presenza di radiazione luminosa. Nel secondo tratto invece abbiamo la
presenza di un’interazione con una radiazione incidente che fa si che la tensione subisca
una brusca discesa, l’entità di tale caduta è naturalmente legata all’intensità della
radiazione stessa. Le oscillazioni aleatorie nel grafico della tensione sono imputabili alla
presenza del rumore termico, presente in ogni apparato elettronico; altra considerazione
molto importante da fare è riguardo alla corrente di buio ovvero la corrente che scorre
nella giunzione pn del fotodiodo quando non c’è rivelazione di radiazione. Tale corrente,
naturalmente indesiderata, è dovuta alla polarizzazione inversa della giunzione che ne
fa passare, seppur in modo molto contenuto, un certo quantitativo; questa può essere
interpretata dal sensore come un flebile segnale di radiazione incidente, degradando
lievemente le prestazioni finali.
17
Figura 1.10: Andamento della tensione del catodo del fotodiodo in funzione del tempo
in presenza di un incidenza di radiazione sul sensore. CORREGGI L’IMMAGINE!!!!!
Per concludere riassumiamo i vantaggi della scelta di realizzare dei sesnsori di immagine a matrice di pixel attivi integrati in tecnologia CMOS. Il primo è certamente
la possibiltà di riutilizzare processi di fabbricazione ormai standardizzati dedicati alla
realizzazione di qualsiasi altro circuito elettronica, cosa che fa diminuire sensibilmente
i costi di produzione.
Altro vantaggio è il basso consumo di potenza che grazie anche allo scaling9 dei
processi CMOS che permette a sua volta di migliorare, ad ogni step tecnologico,
notevolmente la risoluzione10 del sensore.
Un inconveniente che abbiamo invece utilizzando un sensore a pixel attivi è quello
dovuto alla riduzione del cosiddetto Fill Factor, tale grandezza esprime la frazione di
area del pixel dedicata alla fotorivelazione. Nel caso di APS (vedi fig 1.11) sappiamo che
all’interno del pixel, oltre ad avere il fotodiodo, abbiamo un certo numero di transistor
dedicati al trattamento del segnale; nonostante gran parte dell’area sia riservata alla
rivelazione di radiazione avremo che il Fill Factor non sarà mai pari ad uno11 , questo
può, in qualche modo, ridurre la sensibilità del sensore.
9
Lo scaling del processo di fabbricazione CMOS consiste nella riscalamento delle strutture all’avanzare del nodo tecnologico che ha come riferimento la lunghezza del gate di un transistor MOSFET. Questa tendenza ad andare verso lunghezze di canale sempre più basse comporta un notevole
miglioramento dal punto di vista del consumo di potenza.
10
La risoluzione di un sensore di immagine non è altro che la quantità di celle presenti, solitamente
indicata come numero di pixel alla base del rettangolo della matrice per il numero di quelli che stanno
nell’altezza
11
Nel caso di sensori CCD l’intera area del pixel è usata per la fotorivelazione e quindi il Fill Factor
può essere uguale all’unità.
18
Figura 1.11: Layout di un sensore a matrice di pixel attivi e focalizzazione sulla singola
cella.
19
Capitolo 2
Strumenti di simulazione
L’utilizzo di software di simulazione nel progetto di sensori integrati riveste una grande
importanza. Nella realizzazione di un circuito elettronico integrato è oramai fondamentale in quanto consente di dimuire sensibimente i tempi di sviluppo, diminuendo i
costi, permettendo anche di valutare in anticipo, prima di una realizzazione fisica, le
potenzialità e i possibili difetti dell’oggetto finale. Nel far uso di tali software è inoltre
necessario apprendere e conseguire una certa manualità per poterli utilizzare nel modo
più corretto affinché il modello che sta nel simulatore sia consistente con la realtà che
si vuole rappresentare e per comprenderne i limiti che esso presenta.
2.1
Il pacchetto Sentaurus
Il software TCAD Sentaurus distribuito da Synopsys è un insieme di applicazioni che
assistono il progettista nella realizzazione di circuiti integrati. In particolare il software
utilizzato per il lavoro di questa tesi dispone di applicativi per la simulazione di processo
(SP rocess) e di dispositivo (SDevice) oltre ad avere programmi di visualizazione dei
risultati delle simulazione. Questo software è l’evoluzione di ISE T CAD che consentiva
di effettuare simulazioni di dispositivo di strutture bidimensionali, dove lungo la terza
coordinata spaziale veniva, per default, considarata una lunghezza pari a 1µm.
Il grande passo avanti che si è ottenuto con Sentaurus è di certo il fatto di poter
operare simulazioni su strutture sia bidimensionali che tridimensionali, aumentando di
molto il grado di accuratezza dei risultati e di approssimazione con la realtà. È chiaro
come fino a pochi anni fa non fosse possibile fare ciò in quanto le potenze di calcolo
disponibili non erano sufficienti ad elaborare strutture di tale complessità; con il grande
sviluppo che si è avuto negli ultimi anni, i calcolatori possono ora gestire questo tipo
di simulazioni.
Il pacchetto Sentaurus ha al suo interno una vasta gamma di strumenti che possono
essere utilizzati, in fase di sviluppo e ottimizzazione, in molteplici tipi di progetti: ad
20
esempio memorie, circuiti integrati CMOS, celle solari, dispositivi analogici, dispositivi
a radiofrequenza. Naturalmente, nell’ambito specifico di questo lavoro di tesi, è stato
sufficiente utilizzare solo un certo numero di tool applicativi.
2.2
Sentaurus Structure Editor
Il programma che permette la creazione di strutture 2D/3D da poter simulare è Sentaurus Structure Editor 1 . Esso dispone di un’interfaccia grafica (vedi fig 2.1) ma è
possibile anche definire le azioni anche tramite la linea di comando che è situata nell
parte inferiore della finestra.
Figura 2.1: Interfaccia grafica di Sentaurus Structure Editor
Nella barra in alto è possibile notare la presenza di un menù a tendina che permette
di scegliere tra un vasto numero di materiali tra cui troviamo ad esempio anche il silicio
e il metallo, abbiamo inoltre i comandi relativi alla definizione di forme geometriche
bidimensionali e tridimensionali. Una volta definita la geometria della struttura, può
essere necessario definire dei profili di drogaggio; questi possono essere principalmente
di due tipi: un profilo costante oppure un profilo analitico che segua ad esempio un
1
vedi [2]
21
andamento gaussiano; all’interno di Senturus Structure Editor è comunque prevista la
possibilità di emulare una simulazione di processo che può fornire quindi un modello
dei profili di drogaggio un po più accurato.
Per poter effettuare poi delle simulazioni di dispositivo che prevedano quindi l’analisi delle risposte in tensione e corrente, è necessario definire dei contatti; per fare ciò
basta andare nel menù Contact Set e definirli, tramite dei label a propria scelta.
Una volta realizzata la struttura che si vuole poi sottoporre a studio tramite le
simulazioni, è necessario definire la mesh ovvero la discretizzazione spaziale. Tale
processo è indispensabile perchè il software di simulazione andrà a risolvere nei punti
di questa griglia le equazioni che governano la fisica del nostro dispositivo; ecco perchè
questo è un passo molto importante che il progettista deve accuratamente considerare
in quanto si ripercuote direttamente sull’accuratezza dei risultati e sul tempo necessario
per completare le simulazioni.
Figura 2.2: Confronto fra due possibili mesh di una struttura tridimensionale creata
tramite Sentaurus Structure Editor.
Se ad esempio abbiamo una mesh rada (vedi fig 2.2 a sinistra), con pochi punti
per unità di lunghezza, otterremo velocemente dei risultati ma questi saranno poco
accurati; viceversa avendo una mesh molto fitta, oltre ad avere una migliore definizione
dei profili di drogaggio, otterremo dei risultati sicuramente più validi a scapito però di
un tempo di simulazione sensibilmente maggiore.
Il compito di colui che utilizza il software è quindi fare una scelta di compromesso
tra due esigenze evidentemente contrastanti l’un l’altra.
All’interno di Sentuarus Structure Editor è possibile far ricorso a diversi tipi di
motori2 che costruiscono automaticamente la mesh, senza nulla togliere al fatto che
è sempre possibile manualmente aggiungere delle zone in cui infittire ulteriormente la
discretizzazione. Per aver una migliore definizione dei profili di drogaggio, è opportuno
sfruttare la possibilità che ci viene offerta dal software, ovvero quella di imoprre una
regola per la realizzazione della mesh che prevede un infittimento della griglia nei i
2
Tra questi abbiamo ad esempio SnM esh e M esh
22
punti in cui la concentrazione di materiale drogante varia di più. Ciò è possible farlo
tramite la finestra Refinement Placement del menù mesh (vedi fig 2.3).
Figura 2.3: Finestra di “Refinement Placement” che permette la definizione di regole
per la creazione della mesh spaziale.
In questa finestra, tra gli altri parametri è possibile impostare i valori massimi e
minimi del passo per ognuna delle tre direzioni spaziali; naturalmente più questi valori
saranno piccoli e più la mesh sarà fitta.
Una volta completata la definizione della struttura, il progetto può essere salvato
in due formati differenti: DF-ISE o Sentaurus Device; il primo deriva dalla vecchia
versione del software ISE TCAD mentre il secondo è stato introdotto con il nuovo
software. Entrambi i formati però prevedono di avere a disposizione in input due file:
un file ∗.bnd3 (di boundary) che ha al suo interno tutte le informazioni relative ai comandi per la definizione della geometria della struttura e anche ai materiali costituenti
la stessa; un file ∗.cmd (di command) che racchiude tutte le definizioni di profili di
drogaggio, sia analitici che non, e i comandi per la definizione della mesh.
Utilizzando l’interfaccia grafica (GUI) la redazione di questi due file di input è
realizzata automaticamente dal programma, il quale ne effettua l’aggiornamento ad
ogni azione compiuta. Nel momento in cui salviamo avremo, in output, un file ∗.dat
(drogaggio) e un file ∗.grd (griglia) nel caso di salvataggio in formato DF-ISE; nel caso
di salvataggio nel formato Sentaurus Device avremo soltanto un file ∗ msh.tdr che
racchiude al suo interno sia le informazioni di mesh che di profili di drogaggio.
3
Nel caso di salvataggio in formato Senturus device avremo anche un file ∗.tdr.
23
2.3
Sentaurus Process
Sentaurus Process (SProcess) costituisce la parte del pacchetto dedicata alla simulazione di processo, ovvero un software che è in grado di modellare i passi del processo
industriale necessari alla realizzazione di circuiti integrati.
SP rocess non ha a disposizione un’interfaccia grafica, per poterlo utilizzare è necessario utilizzare la riga di comando e impartire le istruzioni una per una oppure è
possibile dare in ingresso un file ∗.cmd contenente la lista intera dei comandi necessari
alla simulazione del processo4 .
In questo senso è possibile definire innanzitutto una struttura geometrica tramite
coordinate spaziali e assegnare alle regioni definite un materiale specifico della lista
messa a disposizione da Sentaurus. Una volta inizializzata la struttra è possibile
simulare (se consideriamo ad esempio il silicio) la crescita dell’ossido all’interfaccia
della superficie; è possibile inoltre definire profili costanti di drogaggio e creare una
maschera per poter poi effettuare l’impiantazione ionica e quindi ottenere delle zone
attive che seguano il pattern individuato dalla maschera stessa.
SP rocess ha anche a disposizione un modello per l’annealing, il passo successivo all’impiantazione ionica, che consiste nel portare il semiconduttore a temperature elevate
per un periodo di tempo precisato per far si che il reticolo cristallino, in parte danneggiato dal processo di impiantazione, possa recuperare la sua integrità. Per evitare poi
il problema del channeling che può provocare una mancata interazione tra il materiale
che si vuol drogare e la specie drogante, è possibile simulare il tilt ovvero un’inclinazione della struttura rispetto alla direzione in cui avviene l’impiantazione ionica;
tale soluzione si ripercuote direttamente nel profilo di drogaggio ottenuto rendendolo
asimmetrico.
Possiamo dire quindi con certezza che, rispetto alle strutture realizzate tramite Sentaurus Structure Editor, con SP rocess abbiamo sicuramente una maggiore accuratezza
e una migliore approssimazione della realtà, soprattutto per quanto riguarda i profili
di drogaggio dove, nel primo caso abbiamo una semplice funzione analitica che descrive
l’andamento della concentrazione di drogante non tenendo conto dei vari parametri di
processo che incidono direttamente nel risultato finale.
Una volta definita la struttura, SP rocess ci da la possibilità di definire i contatti
che saranno poi necessari alla simulazione di dispositivo (effettuata tramite SDevice),
consentendo quindi di fare a meno dell’utilizzo di Sentaurus Structure Editor almeno
per la realizzazione di sempici strutture.
È importante in questo senso rimarcare il vantaggio che si ha nel mantenere la
griglia (discretizzazione spaziale) utlizzata nelle simulazioni di processo per effettuare
4
vedi [3]
24
poi le simulazioni di dispositivo, in quanto ci permette di riutilizzare i raffinamenti
che sono stati definiti accuratamente nella prima fase nelle zone in cui si aveva più
necessità.
Per poter fare ciò è necessario, come vedremo nel prossimo paragrafo, dare in ingresso ad SDevice o un file ∗.tdr (formato Sentaurus) o due file se utilizziamo il
formato DF-ISE: un ∗.dat (file con i profili di drogaggio) e un ∗.grd (file di griglia e
della struttura geometrica).
Per consentire comunque una visualizzazione, o se è necessario, una modifica della
sruttura tramite Sentaurus Structure Editor è possibile importare tali file prima della
simulazione di dispositivo; quello però che è emerso dall’esperienza diretta nell’utilizzao
del software è che, importando la struttura finale realizzata con SP rocess tramite il
solo file ∗.tdr, si ha un impuntamento del programma che carica molto lentamente la
geometria della struttura stessa.
Per ovviare a questo problema si è effettuata una conversione al formato DF-ISE
tramite il comando:
tdx --tdr2dfise -M 0 -S 0 ‘‘nomefile input.tdr’’ ‘‘nomefile output’’
In questo modo è stato possibile visualizzare correttamente la struttura che può poi
essere utilizzata nella simulazione di dispositivo.
2.4
SDevice
SDevice5 costituisce certamente il cuore del pacchetto applicativo, rappresenta infatti
il motore di simulazione vero e proprio. Esso (non dispone di un’interfaccia grafica ma)
è attivabile tramite riga di comando; attraverso un file ∗.cmd, che non è altro che una
lista di comandi, è possibile far partire la simulazione necessaria all’utente, lasciando
la libertà di definire un vasto numero di parametri.
Nel flusso di progetto, i file che sono interessati a questo punto sono innanzitutto
quelli che abbiamo in uscita da Sentaurus Structure Editor (a seconda del formato
scelto); sarà poi necessario avere in input ad SDevice il file ∗.cmd e, quando necessario,
un file ∗.par di parametri (vedi fig 2.5). Una volta completate le simulazioni avremo
in uscita due differenti tipi di estensione di file: i ∗.plt che riguardano le grandezze
macroscopiche6 e i ∗.tdr che riguardano invece le grandezze microscopiche7 . I file di
output di estensione ∗.log non sono altro che dei resoconti in cui sono presenti tutti i
5
vedi [?]e
Queste sono visualizzabili tramite Inspect
7
Visualizzabili con Tecplot.
6
25
Figura 2.4: File del flusso di progetto nel formato DF-ISE.
Figura 2.5: File del flusso di progetto nel formato Sentaurus Device.
dettagli relativi all’esecuzione delle simulazioni, quali i tempi di esecuzione ed eventuali
errori o problemi riscontrati.
Con Sentaurus Device è possibile fare diversi tipi di simulazione (vedi fig 2.6), è
possibile ad esempio avere un singolo dispositivo oppure in generale più dispositivi
definiti tramite Sentaurus Structure Editor connessi ad un circuito che può essere
definito con una netlist Spice.
Possiamo poi distinguere tra due diverse modalità di simulazione: quasistazionaria
e tempo-variante.
Una simulazione quasistazionaria (vedi fig 2.7) consiste nel portare la struttura da
uno stato ad un altro secondo uno step che può essere impostato; ad esempio può essere
necessario portare la tensione di un dato nodo da un valore di tensione V0 ad un valore
finale V1 (vedi eq 2.1). Ad ogni step il motore di simulazione risolve tutte le equazioni
necessarie; queste informazioni saranno poi sfruttate per effettuare una simulazione
tempo-variante.
V = V0 + t(V1 − V0 )
(2.1)
La variabile t rappresenta una variabile temporale fittizia che serve a far variare
la tensione statica dal valore di partenza al valore finale; è possibile decidere lo step
26
Figura 2.6: Sentaurus Device consente di fare simulazioni di singolo dispositivo (a
sinistra), di singolo dispositivo con circuito annesso (al centro) o di più dispositivi con
un circuito a cui sono collegati (a destra).
“temporale” in modo da avere un maggior numero di punti nella caratterizzazione
statica della struttura considerata.
Figura 2.7: Diagramma della simulazione quasistazionaria.
Figura 2.8: Diagramma della simulazione tempo-variante
La simulazione tempo-variante (vedi fig 2.8) invece prevede uno studio dinamico del
dispositivo in questione consentendo quindi un’analisi dell’evoluzione delle grandezze
macroscopiche e microscopiche di interesse al variare del tempo. Vediamo ora come è
composto un file ∗.cmd nelle sue diverse sezioni.
Device {
File {
Grid = ‘‘diodo msh.tdr’’
*Doping = ‘‘diodo.dat’’
27
*Parameter = ‘‘parameter.par’’
Plot = ‘‘staz sensore mdr.dat’’
Current = ‘‘staz sensore mdr.plt’’
}
}
Electrode {
{Name = ‘‘top’’ Voltage = 0.0}
{Name = ‘‘substrato’’ Voltage = 0.0}
}
Physics {
Fermi
Mobility(DopingDep)
Recombination(SRH (DopingDep))
}
System {
Cap cap (‘‘substrato’’=n0 ‘‘top’’=n1 )
Set (n0 = 0.0) *bottom
Set (n1 = 0.0) *n-cont
Capacitor pset Condensatore (n1 n0) capacitance=1e-15
Plot ‘‘nodes.plt’’ ( time() v(n1))
}
File {
Current = ‘‘tot current’’
Output = ‘‘tot output’’
}
Plot {
eDensity hDensity
eCurrent/Vector hCurrent/Vector Current/Vector
28
Doping
ElectricField/Vector
SpaceCharge HeavyIonChargeDensity
Potential
SRHRecombination
}
Math {
Extrapolate
Derivates
RelErrControl
RecBoxIntegr
}
Solve {
Poisson
Coupled (Iterations= 75 NotDamped = 30)
{ Poisson Electron Hole Circuit Contact }
Quasistationary (MaxStep=0.1 MinStep=1e-9 InitialStep=0.1
Goal { Node= ‘‘n1’’ Voltage=1.7 })
{ Coupled (Iterations=20 NotDamped=7)
{ Poisson Electron Hole } }
Save(FilePrefix= ‘‘staz’’)
}
Nella prima parte del file possiamo avere, in generale, il comando Device che viene
impiegato nelle simulazioni di tipo mixed-mode, ovvero quelle che prevedono la presenza
di più dispositivi connessi ad un circuito. Subito dopo abbiamo la sezione File che
consente di richiamare i file della struttura necessari per la simulazione oltre ad avere la
possibilità di richiamare dei file di parametri che pssono essere utili in casi particolari.
Nel caso del nostro esempio abbiamo solamente un file in ingresso dato che stiamo
utilizzando il formato Sdevice.
Oltre ad avere i file di input è possibile scegliere una nomenclatura per i file che
avremo in uscita una volta terminata la simulazione; è possibile inoltre commentare
29
il file ∗.cmd inserendo un asterisco (*) prima della stringa. Nella sezione seguente, la
Electrode, è presente una lista di tutti i contatti che sono stati creati in Sentaurus
Structure Editor8 ; per ciascuno è possibile assegnare un valore di tensione iniziale.
La sezione Physics è quella che richiama i modelli fisici fondamentali per la risoluzione
delle equazioni che consentono la simulazione; tra questi è possibile richiamare ad esempio il modello del trasporto, il modello di mobilità, il modello di ricombinazione e
generazione, le equazioni del trasporto, la statistica di Fermi-Dirac, ecc... In particolare
tra tutti questi modelli è possibile richiamare anche quelli riguardanti la generazione
ottica, come ad esmepio OptBeam che vedremo nel prosieguo della trattazione.
Nella parte successiva del listato abbiamo il comando System che viene utilizzato
solo in caso di simulazioni mixed-mode e serve per definire il circuito a cui vengono
connessi i dispositivi utilizzando i comandi tipici di Spice; nell’esempio abbiamo definito
un condensatore connesso tra il nodo n1 e il nodo n0. Sempre in questa sezione è
possibile dare dei valori di tensione, assegnare quindi lo stato iniziale, ad alcuni nodi
del circuito tramite il comando Set.
Nella sezione Plot abbiamo la possibilità di scegliere le grandezze di interesse su
cui abbiamo bisogno di indagare una volta terminate le simulazioni; ad esempio è
possibile avere a disposizione la densità di elettroni e lacune, la densità di corrente
totale, l’intensità di generazione ottica, l’intensità del campo elettrico o del potenziale
elttrostatico, ecc... Tutte queste grandezze saranno poi graficabili tramite T ecplot.
La sezione Math è dedicata al solutore matematico che sta all’interno di SDevice e
consente di impostare alcuni parametri, quali l’errore massimo ammesso e il numero di
iterazioni, che può influire sensibilmente sulla velocità di convergenza dell’algoritmo e
sulla possibilità stessa di convergenza dato che questa non è sempre garantita.
Focalizziamo ora l’attenzione nella sezione Solve che è sicuramente una delle più
importanti, è in questa infatti che devono essere dichiarati i comandi fondamentali per
la simulazione di interesse; qui è molto importante l’ordine e la gerarchia delle stringhe
presenti. Con il comando Poisson imponiamo al motore di simulazione di risolvere al
primo passo l’equazione di Poisson per poterne utilizzare i risultati ai passi successivi; il
comando Coupled richiama il metodo di Newton e consente di agire su alcuni parametri
che si ripercuotono direttamente nella velocità di convergenza.
Nel caso del nostro esempio abbiamo a che fare con una simulazione stazionaria che
viene eseguita tramite il comando Quasistationary; all’interno dobbiamo innanzitutto
definire il traguardo tramite il comando Goal che in questo caso non è altro che il
raggiungimento per il nodo n1 della tensione di 1, 7V . Con il parametro MaxStep
si definisce lo step temporale massimo che può essere utilizzato dal risolutore, con
8
I nomi dei contatti devono naturalmente corrispondere.
30
MinStep si definisce quello minimo mentre con InitialStep si può definire lo step di
partenza.
Nel caso volessimo fare una simulazione tempo-variante dobbiamo utilizzare la
parola chiave Transient9 .
2.5
Inspect
Una volta terminate le simulazioni, per analizzare i risultati, può essere utile visualizzare le grandezze macroscopiche coinvolte come corrente e tensione; Inspect10 consente
di definire grafici cartesiani e visualizare più curve nello stesso frame.
Figura 2.9: Interfaccia grafica di Inspect
Come abbiamo già accennato in precedenza i file che riguardano le grandezze macroscopiche sono quelli con estensione ∗.plt, e sono proprio questi che possono essere aperti
con Inspect. In fig. 2.9 ad esempio abbiamo una simulazione di un dispositivo a due
contatti (“top” e “substrato”), selezionando uno di questi è poi possibile accedere alle
grandezze di interesse oltre ovviamente ad avere a disposizione la variabile temporale.
9
10
Approfondiremo questo argomento nel capitolo 3.
vedi [5]
31
2.6
Tecplot
Oltre a grandezze come corrente e tensione potrebbe essere necessario visualizzare
altri parametri fondamentali in una simulazione di dispositivo, quali ad esempio il
campo elettrico o la densità di corrente. Lo strumento che permette di visualizzare tali
grandezze, ed altre di tipo microscopico, è Tecplot 360 11 (vedi fig.2.10).
Figura 2.10: Interfaccia grafica di Tecplot 360
Esso può aprire i file di tipo ∗.tdr o i file ∗.dat se stiamo utilizzando il formato DF-ISE e consente una visione tridimensionale della struttura permettendo anche
un’indagine al suo interno tramite gli opportuni strumenti che mette a disposizione.
2.7
Il modello Optical Beam Absorption
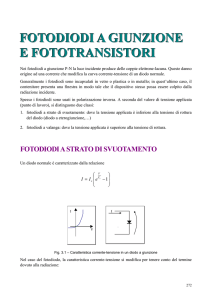
Il modello Optical Beam Absorption, che chiameremo per comodità OptBeam, riproduce l’effetto che hanno i fotoni che colpiscono un certo materiale e può quindi simulare
il fenomeno dell’assorbimento e la generazione di coppie elelttrone-lacuna all’interno
del silicio. Nel complesso il modello si basa sulla relazione empirica che viene fornita
dalla legge di Beer che lega l’assorbimento di fotoni con le proprietà del materiale, quali
lo spessore la natura chimica e la concentrazione.
Vediamo quali sono i parametri fondamentali di questo modello (vedi fig. 2.11).
Con J0 si vuol indicare l’intensità del fascio ottico espresso in numero di fotoni che
11
vedi [6]
32
Figura 2.11: Schema del modello di generazione ottica OptBeam
attraversa un’area di 1cm2 per 1s al centro della “finestra” sul semiconduttore; questa
finestra è definita da due coppie di coordinate (xmin , ymin ) e (xmax , ymax ). Sebbene
venga definita una regione ben delimitata in cui avviene l’interazione dei raggi incidenti
con la superficie del semiconduttore il modello prevede un profilo di decadimento al
di fuori della finestra di tipo gaussiano che può essere modulato intervenendo sulla
deviazione standard σxy ; più sarà grande questo parametro e più avremo un effetto di
dispersione. Altro grado di libertà è dato dalla possibilità di avere un raggio incidente
→
−
che si muove a velocità V . Le equazioni di riferimento del modello fisico di OptBeam
sono le seguenti:
hc
λ
(2.2)
P0
Eph
(2.3)
Eph =
J0 =
dove oltre alle grandezze già note abbiamo P0 che è la potenza incidente per unità
1,24
di area (espressa in W/cm2 ) e Eph espressa in eV (pari all’incirca a λ[µm]
). Il modello
di default calcola il tasso di generazione ottica lungo l’asse z tramite questa formula:
Gopt (z, t) = J0 Ft (t)Fxyv · α(λ, z) · exp(−α | z − z0 |)
dove:
• t è il tempo
33
(2.4)
• Ft (t) è la funzione che esprime l’andamento temporale; è pari ad 1 se t ∈
[tmin , tmax ] e assume un andamento gaussiano con deviazione standard σt al di
fuori dell’intervallo
• z0 è la coordinata lungo l’asse z in cui è posizionata la superficie del semiconduttore
• α(λ, z) è il coefficiente di assorbimento (non uniforme) lungo l’asse z
Una formula più avanzata, adatta a dispositivi in cui può variare il coefficiente di
assorbimento è:
opt
G (z, t) = J0 Ft (t)Fxyv · α(λ, z) · exp(− |
Z z
α(λ, z 0 )dz 0 |)
(2.5)
z0
Per implementare il modello OptBeam nel file ∗.cmd occorre innanzitutto attivarlo tramite la parola chiave OptBeam nella sezione Physics; di seguito è necessario
definire un elenco di parametri racchiuso in due parantesi tonde. Vediamo quali sono
i principali:
• WavePower: indica la potenza del raggio incidente in W/cm2 , può essere utilizzato
al suo posto il comando WaveInt
• WaveLength: permette di definire la lunghezza d’onda espressa in cm
• SemAbs: è una parola chiave che permette di richiamare i modelli di assorbimento,
ad esempio quello del silicio si attiva tramite l’opzione Model=RSS
• SemSurf: indica la coordinata z in cui si ha l’intefaccia della superficie del
semiconduttore in cui avviene l’incidenza del raggio
• SemWindow: permette di scegliere le due coppie di coordinate (xmin , ymin ) e
(xmax , ymax ) che delimitano la finestra
• WaveTime: riceve come parametri una coppia di istanti temporali che indicano
l’intervallo [tmin , tmax ] in cui l’intensità del fascio rimane costante
• WaveTsigma: non è altro che la deviazione standard σt della gaussiana che modella
il decadimento temporale dell’intensità
• WaveXYsigma: è la deviazione standard σxy della gaussiana che descrive il decadimento spaziale della generazione ottica
→
−
• SemVelocity: indica l’intensità del vettore V che rappresenta la velocità con cui
la finestra di generazione si sposta lungo la direzione perpendicolare a quella di
incidenza
34
Figura 2.12: Metodo RecBoxIntegr
Per poter attivare il calcolo della generazione ottica è inoltre necessario inserire nella sezione Math la parola chiave RecBoxIntegr; questo comando migliora l’accuratezza
soprattutto nei casi in cui si ha a che fare con mesh non troppo fitte. Il metodo suddivide il volume di controllo (fig. 2.12), un poligono, in diversi rettangolini ed effettua
un’integrazione per ognuno di questi restituendo alla fine una stima migliore della generazione ottica nel vertice della mesh di riferimento. Per ottenere una visualizzazione
grafica della generazione ottica una volta terminate le simulazioni è necessario inserire
la medesima parola chiave OptBeam all’interno della sezione Plot cosicchè essa sarà
accessibile nel menù di T ecplot.
2.8
Il cluster di calcolo dell’INFN
Nell’affrontare l’argomento oggetto di questa tesi è facilmente comprensibile come sia
stato necessario, nell’analisi del modello di generazione, operare un gran numero di
simulazioni date le tante variabili in gioco e i tanti gradi di libertà che il pacchetto
simulativo ha messo a disposizione.
Una volta che è stata raggiunta una sufficiente conoscenza del modello di generazione ottica sono stati eseguiti numerosi set di simulazioni con lo scopo di caratterizzare, in modo qualitativo, la risposta dei pixel della matrice del sensore al variare della
posizione dello spot in cui il fascio di fotoni incide.
Dato l’elevato carico per le complessità delle strutture sotto esame è stato fondamentale accedere alle risorse di calcolo messe a disposizione dal cluster di calcolo
dell’INFN chiamato anche GRID.
La rete di computer fa parte di una rete a livello internazionale12 , la LCG (LHC13
Computing Grid) che ha come scopo quello di mettere a disposizione le risorse di
12
vedi [7]
è il Large Hadron Collider, il più importante acceleratore di particelle a livello mondiale situato a
Ginevra.
13
35
Figura 2.13: Schema della struttura del cluster di calcolo dell’INFN di Perugia.
calcolo di molteplici istituti di ricerca per lo studio e l’analisi dei dati derivanti dagli
esperimenti effettuati con l’LHC a Ginevra.
Dell’intera LCG la sezione italiana è appunto denominata INFN-Grid, dentro la
quale troviamo la rete di Perugia che mette a disposizione 100 CPU.
Nella figura 2.13 vediamo, in modo schematizzato, l’architettura del cluster con le
sue componenti; possiamo principalmente distinguere tra due tipi di nodi che compongono la rete: i nodi di frontiera e quelli interni. I primi sono quelli che possono
essere accessibili dall’esterno e che quindi svolgono una funzione di interfacciamento
tra l’utente e il cluster mentre i nodi interni non sono invece raggiungibili.
Tra i nodi di frontiera possiamo citare ad esempio l’User Interface che è quello con
cui l’utente interagisce direttamente ed è in grado di avviare e controllare i processi e
inotltre accedere ai dati archiviati nello storage messo a disposizione (nodo di frontiera
Storage Element).
Un’altra tipologia di nodo è l’Install Server che è adibito al repository del software,
ovvero alla gestione delle immagini del sistema operativo in uso nei nodi, consentendo
un agevole manutenzione (installazione e aggiornamento) dei sistemi utilizzati.
Tra i nodi interni al cluster invece abbiamo i Worker Node che sono quelli che
eseguono fisicamente i processi richiesti dall’utenza; questi possono variare a seconda
della potenza di calcolo della singola macchina relativa al nodo determinando direttamente le prestazioni offerte in termini di velocità di esecuzione. Altri nodi sono i File
Server che sono addetti all’archiviazione dei dati di tutto il cluster tramite un array di
dischi per un capacità di oltre 30 TB.
36
Capitolo 3
Preparazione alle simulazioni
Dato il nostro obiettivo di caratterizzare la risposta di sensori integrati dobbiamo innanzitutto avere il controllo degli strumenti di simulazione che dobbiamo utilizzare.
Conviene quindi iniziare a lavorare su una struttura semplice che consenta di ridurre
al minimo i tempi di simulazione e che permetta alla fine di padroneggiare il modello
di generazione OptBeam utilizzato.
La struttura più semplice che possiamo immaginare è un singolo fotodiodo di
dimensioni contenute (10 x 10 x 10 µm).
I passi descritti in questo capitolo seguono questo schema di massima:
• definizione della struttura geometrica, profili di drogaggio, contatti ohmici e mesh
tramite Sentaurus Structure Editor
• simulazione di dispositivo operata tramite SDevice
• lettura dei risultati delle simulazione tramite Inspect e T ecplot
3.1
Costruzione della struttura
Per definire la struttura tramite Sentaurus Structure Editor dobbiamo innanzitutto
assicurarci di aver attivato la funzione Exact Coordinates che ci consente di creare
forme geometriche in 3 dimensioni inserendo le coordinate esatte dei punti che le delimitano1 . Scegliamo “Silicio” dal menù dei materiali e andiamo quindi nel menù Draw
→ 3D Create Tools → Create Cuboid ed inseriamo le coordinate di due punti che
staranno all’opposto, rispetto al centro, nel cubo finale (vedi fig 3.1).
Definiamo ora i contatti che ci serviranno poi per le simulazioni; abbiamo bisogno
in questo caso di definirne due: il contatto di substrato e quello della zona di tipo n.
Andiamo nel menù Contacts → Contact Set e definiamo, assegnando dei nomi, i due
1
vedi [8]
37
Figura 3.1: Finestra per la definizione del solido in silicio.
contatti (vedi fig 3.2); dobbiamo ora associare a questi nomi le regioni della struttura a
cui fanno riferimento. Per quanto riguarda il substrato basta semplicemente selezionare
la faccia inferiore del cubo di silicio, selezionare il contatto “substrato” nel menù a
tendina e cliccare su Set Faces nel menù Contacts. Per quanto riguarda invece il
contatto della zona attiva dobbiamo invece seguire un percorso diverso dato che esso
non occuperà la totalità di una delle facce del cubo.
Figura 3.2: Finestra per la definizione dei contatti della struttura.
Per ottenere un contatto di dimensioni a piacere dobbiamo prima creare un parallelepipedo di metallo che intersechi la struttura e poi cancellarlo, in questo modo
rimarrà una “finestra” nel punto di intersezione che potrà in seguito essere definita
come contatto di top. Scegliamo quindi dal menù a tendina dei materiali “Metal” e poi
creiamo un parallelepipedo inserendo questa coppia di coordinate: (-1,-1,10) (1,1,11).
Cancelliamo ora il solido appena creato per ottenere il nostro contatto (vedi fig
3.3) che verrà associato allo stesso modo di quello di substrato, in questo caso il nome
assegnato è “top”. Dobbiamo ora definire il profilo di drogaggio del silicio tramite il
menù Device; iniziamo definendo un profilo costante di drogaggio di tipo p tramite
boro con concentrazione pari a 1015 cm−3 (vedi fig 3.4).
Prima di definire il profilo di drogaggio della zona attiva dobbiamo creare una “finestra” che sarà utilizzata come riferimento: andiamo su Mesh → Define Rev/Eval
Window → Rectangle e immettiamo le coordinate di due punti appartenenti al piano xy in modo da ottenere un quadrato di 2x2 µm centrato nella faccia superiore
38
Figura 3.3: Contatto per il catodo del fotodiodo.
Figura 3.4: Finestra per la definizione di profili costanti di drogaggio.
39
del nostro fotodiodo (vedi fig 3.5). Una volta definita tale finestra andiamo nel menù
Mesh → Analytical Profile Placement per scegliere i parametri (vedi fig 3.6).
Figura 3.5: Creazione di una finestra da usare come riferimento per la definizione del
profilo analitico di tipo n.
Figura 3.6: Finestra per la definizione di profili analitici di drogaggio.
L’ultimo passo che ci rimane da fare è costruire la mesh, ovvero la discretizzazione
spaziale, della struttura che verrà poi utilizzata per fare le simulazioni; questa è una
parte molto importante in quanto determina sia la consistenza e l’affidabilità dei risultati sia i tempi di simulazione richiesti, è chiaro quindi che dovremo fare una scelta di
compromesso tra due interessi contrastanti. Per definire meglio la mesh andiamo nel
menù omonimo e selezioniamo Refinement Placement (vedi fig 3.7).
Questa finestra ci permette di operare sui parametri della mesh che verrà creata
poi in automatico dal motore SnM esh; definiamo una regola per cui la mesh sarà più
40
Figura 3.7: Finestra di dialogo per la definizione di regole per il raffinamento della
mesh.
41
fitta nelle zone in cui il drogaggio varia di più, mentre sarà più rada nelle zone in cui
il drogaggio sarà pressochè costante. Impostiamo il valore massimo della cella spaziale
a 2µm e un valore minimo pari a 0, 5µm per ogni direzione (secondo x, y e z).
Figura 3.8: Costruzione della mesh della struttura.
Per visualizzare la mesh diamo il comando Build Mesh (vedi fig 3.8); notiamo qua
come in effetti nella parte inferiore della struttura abbiamo una mesh uniforme mentre
nella zona attiva abbiamo un infittimento, soprattutto nella giunzione tra le 2 zone di
differente drogaggio.
3.2
Simulazione quasistazionaria
Dobbiamo ora prepararci alla simulazione di dispositivo; innanzitutto è necessario effettuare una simulazione di tipo quasistazionario che porti gradualmente la tensione
del contatto di “top” al valore di polarizzazione desiderato. Il listato utilizzato è il
seguente:
Device TUTTO {
File {
Grid = ‘‘diodo msh.tdr’’
*Doping = ‘‘diodo.dat’’
*Parameter = ‘‘parameter.par’’
Plot = ‘‘staz sensore mdr.dat’’
42
Current = ‘‘staz sensore mdr.plt’’
}
}
Electrode {
{Name = ‘‘top’’ Voltage = 0.0}
{Name = ‘‘substrato’’ Voltage = 0.0}
}
Physics {
Fermi
Mobility(DopingDep)
Recombination(SRH (DopingDep))
}
System {
TUTTO tutto (substrato=n0 top=n1c )
Set (n0 = 0.0) *bottom
Set (n2 = 1.8) *Vdd
Set (nresetsignal = 0.0) *n-cont
Set (n1c = 0.0) *n-cont
Hint (ntobereadc = 0.0)
Capacitor pset Condensatore (n1 n0) capacitance=1.12e-15
nmos lowVth umc mos emitterfolowerc (n2 n1c ntobereadc n0) {
l= 0.26e-6
w= 0.46e-6
ad= 211.6e-15
as= 211.6e-15
pd= 1.38e-6
ps= 1.38e-6
}
43
nmos lowVth umc mos resetterc (n2 nresetsignal n1c n0) {
l= 0.26e-6
w= 0.46e-6
ad= 211.6e-15
as= 211.6e-15
pd= 1.38e-6
ps= 1.38e-6
}
nmos lowVth umc mos readerc (ntobereadc n2 n0 n0) {
l= 0.26e-6
w= 0.46e-6
ad= 211.6e-15
as= 211.6e-15
pd= 1.38e-6
ps= 1.38e-6
}
Plot ‘‘nodes.plt’’ (time() v(n1c) v(nresetsignal) v(ntobereadc)
v(ntobereadsx) v(ntobereaddx) v(ntobereadsxsx) v(ntobereaddxdx))
}
File {
SPICEPath= ‘‘../parameter/’’
Current = ‘‘tot current’’
Output = ‘‘tot output’’
}
Plot {
eDensity hDensity
eCurrent/Vector hCurrent/Vector Current/Vector
Doping
ElectricField/Vector
SpaceCharge HeavyIonChargeDensity
Potential
SRHRecombination
}
44
Math {
Extrapolate
Derivates
RelErrControl
RecBoxIntegr
}
Solve {
Poisson
Coupled (Iterations= 75 NotDamped = 30)
{ Poisson Electron Hole Circuit Contact }
Quasistationary (MaxStep=0.1 MinStep=1e-9 InitialStep=0.1
Goal { Node= ‘‘n1c’’ Voltage=1.7 })
{ Coupled (Iterations=20 NotDamped=7)
{ Poisson Electron Hole } }
Save(FilePrefix=‘‘staz’’)
}
In questo file des.cmd è stato inserito il circuito di fig 1.9 utilizzando i comandi Spice;
da notare la sezione System a tal proposito dove è stata anche aggiunta una capacità
di 1.12pF che tiene conto degli effetti parassiti presenti; la tensione di alimentazione
(nodo n2) è stata posta a 1.8V . Si è reso necessario inoltre richiamare nella seconda
sezione File il file mos.scf nella cartella /parameter/ che contiene al suo interno tutti
i parametri caratteristici dei transistori MOSFET che fanno parte della netlist.
Nella parte finale del listato, all’interno del comando Quasistationary inseriamo
il comando Save(FilePrefix=‘‘staz’’) per fare in modo che i risultati ottenuti con
la simulazione quasistazionaria siano caricabili dalla simulazione tempo-variante.
3.3
Simulazione tempo-variante
Eseguita la simulazione stazionaria dobbiamo ora preparare il listato per la simulazione
tempo-variante creando un nuovo file chiamato des T V.cmd; da tale file richiamiamo,
oltre ai file della struttura anche quelli ottenuti con la simulazione stazionaria.
45
La scrittura di questo file è il punto più delicato e importante del setup di simulazione, in quanto all’interno di des T V.cmd andremo a definire il profilo di generazione
ottica tramite il modello OptBeam e parametri come il tempo di simulazione e lo step
temporale con cui il motore risolutivo andrà ad operare.
Innanziutto è necessario definire l’andamento temporale del segnale di RESET
del circuito; avendo come riferimento il listato per la simulazione quasistazionaria
aggiungiamo questa riga all’interno della sezione System:
Vsource pset resetsignal (nresetsignal n0) pulse = (0 1.8 0.1e-6 5e-9
5e-9 5e-6 20e-6)
L’andamento che viene rappresentato non è altro che un periodo di onda quadra:
da 0.1 · 10−6 s fino a 5 · 10−6 s il segnale è alto e quindi permette la carica del nodo
del catodo del fotodiodo mentre dopo l’istante 5 · 10−6 è basso. Supponiamo di fissare
l’intero intervallo temporale di simulazione tra 0s e 8.4 · 10−6 s, all’interno di questa
finestra avremo l’interazione del semiconduttore con la radiazione incidente.
Per poter utilizzare il modello ottico modifichiamo la sezione Physics aggiungendo
il comando OptBeam in questo modo:
OptBeam (
WaveLength = 783e-7
WavePower = 4e+3
SemAbs (model = RSS)
SemSurf = 10e-4
SemWindow=((-0.2e-4 -0.2e-4)(0.2e-4 0.2e-4))
WaveTime = (8e-6 , 8.000050e-6)
WaveTsigma = 1e-12
WaveXYsigma = 0.1e-4
)
Stiamo quindi parlando di un fascio di fotoni di lunghezza d’onda pari a 783nm per
una potenza incidente pari a 4 · 103 W/cm2 che colpisce la superficie del semiconduttore
attraverso una finestra di 0, 4X0, 4µm2 ; il fascio è definito costante per un intervallo
2
In realtà lo spot di generazione ottica che avremo sulla superficie sarà più grande data la presenza
di una funzione di decadimento di tipo gaussiano di deviazione standard pari a WaveXYsigma.
46
di tempo pari a 50ps a partire dall’istante t = 8µs e decade secondo un andamento
gaussiano di deviazione standard WaveTsigma pari a 1ps.
Andiamo ora a vedere come impostare la sezione Solve per eseguire una simulazione
tempo-variante. Dobbiamo richiamare i file della stazionaria con questi comandi:
Load (FilePrefix= ‘‘..’’)
Newcurrent = ‘‘sensore trans’’
Dobbiamo poi “staccare” il nodo del catodo del fotodiodo affinchè possiamo studiarne l’evoluzione temporale, questo è possibile tramite il comando Unset(n1c), anch’esso posto nella sezione Solve.
Siamo pronti quindi per richiamare il comando per la simulazione tempo-variante
tramite la parola chiave Transient; all’interno è necessario definire i due istanti che
delimitano l’intervallo temporale. È opportuno suddividere l’intero periodo di simulazione in più parti in modo da gestire meglio lo step temporale, tenendolo grande negli
intervalli in cui non ci si aspettano grandi variazioni e invece diminuendolo laddove le
grandezze di interesse, quali corrente e tensione, evolvono con più velocità.
Possiamo concettualmente dividere il tempo di simulazione in tre parti principali:
1. pre-carica del nodo del catodo del fotodiodo → grandi variazioni
2. attesa dell’incidenza del fascio di fotoni → piccole variazioni
3. incidenza della radiazione luminosa → grandi variazioni
Nella prima fase abbiamo il segnale di reset alto che carica il nodo del catodo
portandolo alla tensione di polarizzazione, dobbiamo quindi mantenere sufficientemente
basso lo step temporale per avere, in fase di analisi dei risultati, una curva abbastanza
liscia. Nel file des T V.cmd ad esempio possiamo mettere:
Transient (
InitialTime= 0.11e-6 Finaltime= 4.6e-6
MaxStep=1e-7 MinStep=1e-9 InitialStep= 1e-9
)
{ Coupled (Iterations= 10 NotDamped = 7)
{ Poisson Electron Hole Circuit Contact }
}
47
Dove InitialTime e Finaltime castituiscono gli estremi dell’intervallo temporale;
MaxStep, MinStep e InitialStep sono rispettivamente step massimo, minimo e iniziale che il motore di simulazione utilizzerà a seconda delle condizioni di convergenza.
I restanti comandi sono relativi all’algoritmo di risoluzione e ai modelli fisici che sono
coinvolti nella simulazione. Questa parte del listato è in realtà relativa ad un sottointervallo del primo periodo, dove lo step temporale è stato diminuito leggermente
assegnando a MaxStep il valore di 1 · 10−7 . Per il periodo in cui stiamo aspettando che
ci sia l’incidenza del fascio di fotoni possiamo pensare di tenere il MaxStep nell’ordine
di 10−5 ÷ 10−7 s in modo da non sprecare le risorse di calcolo e allungare i tempi di
simulazione dove non è necessario.
È molto importante invece infittire la griglia temporale nel periodo subito precedente e subito successivo all’incidenza del raggio che ricordiamo essere stata fissata a
8µs:
Transient (
InitialTime= 7.95e-6 Finaltime= 8.4e-6
MaxStep=5e-9 InitialStep= 1e-11
)
{ Coupled (Iterations= 10 NotDamped = 7)
{ Poisson Electron Hole Circuit Contact }
}
Plot ( Time= (7.9999e-6; 8.001e-6; 8.003e-6; 8.005e-6; 8.01e-6; 8.02e-6;
8.03e-6; 8.05e-6) NoOverwrite)
In questo caso si può notare come si è fatto arrivare lo step massimo ad un valore di
5ns e non si è specificato nessun step minimo cosı̀ da lasciare al simulatore una scelta.
Nella sezione Transient in questo caso è stato aggiunto anche il comando Plot in
cui è possibile definire una serie di istanti temporali in cui è possibile salvare lo stato
del dispositivo, una sorta di istantanea, in modo da poter effettuare un’analisi tramite
la visualizzazione delle grandezza microscopiche con T ecplot; in questo caso abbiamo
fissato alcuni istanti prima, durante e dopo l’incidenza dei fotoni.
3.4
Visualizzazione dei risultati
La simulazione effettuata con il file des T V.cmd descritto nel paragrafo precedente
ha prodotto dei file ∗.plt visualizzabili tramite Inspect e dei file ∗.tdr visualizzabili
con T ecplot. Iniziamo innanzitutto col vedere la generazione di carica che abbiamo
48
all’interno della struttra; in fig 3.9 è possibile vedere come la generazione, all’istante
t = 8.001µs, riesca ad attraversare l’intero fotodiodo e come l’intensità, nella direzione
perpendicolare alla direzione di incidenza, diminuisca in modo molto rapido.
Figura 3.9: Generazione ottica all’interno del fotodiodo all’istantet = 8.001µs.
Il risultato che ci aspettiamo è che dentro la struttura ci sia generazione di coppie
elettrone-lacuna le quali possono essere raccolte dal campo elettrico della giunzione;
per avere un’idea di questo fenomeno vediamo la densità di corrente totale attraverso
T ecplot in quattro istanti di tempo diversi (vedi fig 3.10).
Nella figura abbiamo una sezione che taglia il fotodiodo al centro; si può vedere,
guardando le scale dei colori, come la corrente sia differente nei quattro casi. Prima
dell’interazione con la radiazione abbiamo una corrente pressochè nulla3 (denotata da
colori freddi) mentre nel secondo istante di tempo preso in esame abbiamo dei colori
più caldi indice di una corrente più elevata; nello specifico abbiamo una regione di
massimo che si trova proprio nei pressi della zona di giunzione tra le due diverse zone
di drogaggio dove abbiamo quindi la regione svuotata e il massimo del campo elettrico.
Nelle due restanti istantanee abbiamo un affievolimento della densità di corrente dato
che oramai la generazione è del tutto passata e la raccolta delle cariche è quasi del
tutto ultimata.
Vediamo ora le risposte del fotodiodo in termini di tensione del catodo; in fig 3.11
vediamo come nella prima parte della simulazione abbiamo la precarica del nodo fino
alla tensione di 1, 8V .
3
Considerare che è la corrente che attraversa un diodo in polarizzazione inversa
49
Figura 3.10: Densità di corrente totale in quattro istanti di tempo, partendo da sinistra
in alto in senso orario: t = 7.9999µs , t = 8.001µs, t = 8.003µs e t = 8.005µs.
Figura 3.11: Andamento della tensione del catodo del fotodiodo al variare del tempo.
50
Arrivati a t = 5µs, quando il segnale di RESET va basso, la tensione del catodo va
lentamente diminuendo analogamente allo scaricamento di un condensatore; quando
siamo in prossimità dell’inizio della generazione ottica (a t = 8µs), vediamo come la
tensione cali bruscamente da un valore di 1, 753V fino a 1, 465V per un ∆V = 288mV .
Per poter indagare meglio sul comportamento del modello fisico implementato da
OptBeam abbiamo provato a variare la posizione della finestra di incidenza della radiazione modificando i parametri in SemWindow; quello che è emerso è stato che per
particolari posizioni si riscontrava un comportamento anomalo.
L’anomalia consisteva nell’avere una generazione molto piccola, praticamente nulla, che si rispecchiava in un caduta di tensione del catodo molto limitata. Questa
particolarità è stato oggetto di un approfondimento soprattutto per quanto riguarda i
diversi parametri del modello OptBeam, la discretizzazione spaziale operata in fase di
creazione della mesh e in questo senso sono state fatte molteplici prove.
Ma quello che si è rivelato fondamentale alla fine è stato lo studio del comportamento in termini di corrente che attraversa il fotodiodo.
Figura 3.12: Andamento della corrente che attraversa il fotodiodo, zoom nell’intervallo
in cui avviene la generazione ottica. La finestra dello spot è stata fissata al centro del
fotodiodo.
In fig 3.12 abbiamo focalizzato l’attenzione sull’intervallo temporale in cui ci aspettiamo l’incidenza della radiazione luminosa; quello che si può prevedere è che nell’istante
in cui si è fissata la generazione si dovrebbe avere un impulso di corrente che poi decada
in maniera esponenziale secondo i parametri scelti nel modello OptBeam.
51
Nella figura sono contrassegnati con dei quadratini i punti relativi agli step di
simulazione, ed è possibile notare come sono presenti pochi punti nella zona dell’impulso
producendo quindi dei risultati molto scarsi in termini di accuratezza. La sagomatura
di quest’impulso è infatti molto importante in quanto meglio è riprodotto e meglio
l’intensità di generazione ottica viene calcolata dal simulatore.
Dobbiamo quindi riottimizzare la discretizzazione temporale andando a variare i
parametri delle sezioni Transient del file des T V.cmd per le simulazioni:
Transient (
InitialTime= 7.9999e-6 Finaltime= 8.015e-6
MaxStep=5e-11 InitialStep= 1e-11 )
In questo modo abbassiamo considerevolmente (di due ordini di grandezza) lo step
massimo nell’intervallo di tempo più importante per poi riportarlo a valori dell’ordine
di 10−9 s nell’ultimo periodo della simulazione dove le variazioni saranno meno marcate.
Figura 3.13: Sagomatura dell’impulso di corrente.
In fig 3.13 vediamo come sia stato possibile ottenere una definizione dell’impulso
di corrente migliore rispetto a prima; c’è però da notare come nel periodo di tempo
seguente all’incidenza della radiazione si ha un comportamento simile ad un effetto
di rumore con fluttuazioni di corrente molto rapide forse dovute alla presenza del
circuito con i tre transistori. Per poter semplificare ulteriormente ed evitare questi
effetti non voluti ipotizziamo di schematizzare il circuito di carico del fotodiodo con
un semplice condensatore di capacità pari a 1f F . In questo caso quindi non è più
necessario utilizzare un segnale di RESET ma basta solo precaricare il nodo di catodo
alla tensione che scegliamo pari a 1, 7V .
Dato che il circuito a cui è connesso il fotodiodo è cambiato dobbiamo ovviamente
ripetere la simulazione stazionaria per avere una caratterizzazione statica del dispos52
itivo; portiamo in questo modo la tensione del catodo da 0V a 1, 7V . Conviene ora
modificare anche il file des T V.cmd per la simulazione tempo-variante e fissiamo l’istante in cui abbiamo la generazione a 1 µs. Infittiamo ulteriormente la griglia temporale
portando, nell’intervallo chiave, il MaxStep a 2 ps:
Transient (
InitialTime= 0.9999e-6 Finaltime= 1.0002e-6
MaxStep=2e-12 InitialStep= 2e-12 )
Figura 3.14: Impulso di corrente sagomato in maniera corretta
Vedendo la risposta in corrente (fig 3.14) possiamo affermare ora che la sagomatura
dell’impulso viene effettuata in modo corretto; in questo senso non abbiamo riscontrato
l’anomalia di cui avevamo parlato in precedenza, inoltre non abbiamo più gli effetti
dovuti ai transistor. Vediamo ora il comportamento del fotodiodo in termini di tensione
(fig 3.15); abbiamo un valore costante di tensione di 1, 7V fino a t = 1µs quando avviene
la generazione ottica e abbiamo quindi una caduta di tensione fino a 1, 648V .
Le diverse prove effettuate fin qui hanno portato ad una sufficiente padronanza degli
strumenti di simulazione per poter passare alla simulazione per la caratterizzazione di
strutture più complesse con un ragionevole grado di affidabilità.
53
Figura 3.15: Andamento della tensione del catodo del fotodiodo.
54
Capitolo 4
Analisi dei risultati
Nel capitolo 3 abbiamo visto come poter realizzare simulazioni su una semplice struttura tridimensionale di un fotodiodo, in particolare ci siamo soffermati nella configurazione del file des T V.cmd e nell’importanza che esso riveste nella corretta implementazione del modello di generazione ottica OptBeam utilizzato.
Il passo successivo che ci aspetta è quello di caratterizzare il funzionamento di
strutture tridimensionali di maggiore complessità che prevedano la presenza di più
pixel, quindi di più fotodiodi, variando alcuni parametri quali la posizione di incidenza
del fascio luminoso, la lunghezza d’onda dei fotoni e la potenza associata alla radiazione.
Nell’ambito specifico di questa tesi possiamo distinguere principalmente due tipi di
strutture: la “small” e la “large”. Vedremo, nel seguito della trattazione, quali sono le
caratteristiche dell’una e dell’altra e quali dati emergono nel confronto effettuato tra
le due soluzioni prese in esame.
4.1
Struttura “small”
La prima delle strutture che considereremo è quella che chiameremo small ; l’aspetto
sostanziale che differenzia questa dalla large risiede nella forma geometrica del singolo
fotodiodo del pixel attivo.
Per poter meglio simulare il comportamento reale della risposta del sensore conviene
considerare non un singolo pixel ma un gruppo di pixel, ipotizziamo quindi di avere un
sottoinsieme della matrice attiva composto da nove fotodiodi disposti su una superficie
quadrata.
Considerato l’aumento non indifferente delle risolse di calcolo necessarie per poter
gestire una struttura del genere si può pensare di effettuare una semplficazione per
poter accorciare i tempi di simulazione: ci limitiamo a considerare un pixel (centrale)
con intorno delle sezioni degli altri pixel ottenute “tagliando” la struttura lungo i punti
centrali di ogni zona attiva dei fotodiodi.
55
Figura 4.1: Geometria della struttura usata nelle simulazioni per la caratterizzazione
dei pixel “small”.
Otteniamo in questo modo la struttura in fig 4.1 che non è altro che un parallelepipedo di base quadrata (20 x 20 µm) e di altezza pari a 50 µm. Nella figura a
destra abbiamo un particolare della faccia superiore in cui vediamo in dettaglio la geometria del fotodiodo, ovvero la forma della zona attiva di tipo n che in questo caso è un
quadrato di lato 5 µm1 ; vediamo inoltre un altro parametro importante che è la distanza reciproca tra i pixel, tale grandezza può influenzare sensibilmente il funzionamento
e le prestazioni del sensore.
Naturalmente nel realizzare questa struttura è stato necessario, in aggiunta a quello
che abbiamo visto nella procedura che abbiamo visto nel capitolo 3, definire altri otto
contatti; il nome di ogni contatto rispecchia la sua posizione rispetto a quello centrale,
avermo quindi partendo da quello in alto a sinistra e andando in senso orario: “upsx”,
“up”, “updx”, “dx”, “downdx”, “down”, “downsx” e “sx” oltre a “centrale”.
Per quanto riguarda i profili di drogaggio possiamo dire che sono del tutto analoghi
a quelli utilizzati nella struttura del capitolo 3 considerando quindi un profilo costante
di tipo p (boro con concentrazione pari a 1015 ) e nove profili gaussiani di tipo n (fosforo
con concentrazione di picco pari a 1019 ).
Nell’operare la discretizzazione spaziale in questa struttura si è scelto di impostare
i parametri in modo da avere circa 4500 punti cosı̀ da avere tempi brevi nell’esecuzione
delle simulazioni. Abbiamo mantenuto invariati invece i valori relativi ai parametri che
definiscono la discretizzazione temporale nella sezione Transient del file des T V.cmd
anche se si è deciso di portare a 1, 8 µs l’intervallo complessivo della simulazione cosı̀
1
in realtà la finestra di definizione della zona attiva è un quadrato di lato 2 che si espande a causa
della diffusione laterale.
56
da avere una migliore lettura degli andamenti in tensione e corrente dei fotodiodi.
Ricordiamo inoltre che le zone attive di tipo n sono tutte collegate a condensatori di
capacità pari a 1 f F .
Lo stimolo ottico utilizzato è un fascio di fotoni di lunghezza d’onda pari a 783 nm
come è possibile vedere dal listato seguente che è stato estratto dal file des T V.cmd:
OptBeam (
WaveLength = 783e-7
WavePower = 4e+3
SemAbs (model = RSS)
SemSurf = 0
SemWindow=((-0.2e-4 -0.2e-4)(0.2e-4 0.2e-4))
WaveTime = (1e-6 , 1.000050e-6)
WaveTsigma = 1e-12
WaveXYsigma = 0.1e-4
)
Nel caratterizzare la struttura pensiamo ora di variare il punto di incidenza del
fascio di fotoni agendo sul parametro SemWindow2 della sezione OptBeam. Variando il
punto di impatto lungo il piano xy cerchiamo di vedere come rispondono i fotodiodi,
ovvero quanta carica riescono a raccogliere e quindi quale ∆V riescono a fornire.
Nell’eseguire questo tipo di simulazioni si può fare un considerazione preliminare
che riguarda la natura simmetrica della struttura. È ragionevole infatti pensare che
sia sufficiente eseguire simulazioni in un solo quarto della superficie superiore per avere
una caratterizzazione completa per tutti e nove i pixel.
Spostiamo quindi lo spot lungo l’asse positivo delle x e lungo l’asse positivo delle
y fino a coprire un quadrato di lato pari a 5 µm con passo di 0, 5 µm partendo dalla
posizione centrale (vedi fig 4.2), cioè con il fascio centrato nel pixel centrale3 .
Cominciamo innanzitutto a vedere il comportamento per questo tipo di posizione.
In fig 4.3 vediamo gli andamenti della tensione dei catodi dei fotodiodi al variare del
tempo; possiamo dire che il comportamento mostrato era quello che ci aspettavamo,
anche alla luce di quanto detto nel capitolo 3. La tensione del pixel centrale, direttamente colpito, subisce una brusca caduta (da 1,7 V a 1,652 V per un ∆V = 48 mV )
2
i valori presi in ingresso dal parametro SemWindow devono essere espressi in cm, nel seguito della
trattazione faremo riferimento a valori in µm per semplicità. Ricordiamo che questi sono le coordinate
di due punti che definiscono la finestra di generazione.
3
in questo caso la finestra è centrata in (0,0).
57
Figura 4.2: Il quadrato in nero rappresenta la zona presa in considerazione per far
variare la posizione dello spot.
Figura 4.3: Andamenti della tensione per spot posizionato al centro.
58
mentre si può notare come gli altri otto pixel subiscano una caduta molto più lieve,
indice del fatto che quasi la totalità delle cariche viene raccolta dal fotodiodo centrale.
Figura 4.4: Andamenti della tensione dei pixel laterali per lo spot posizionato al centro.
Basta vedere fig 4.4 per rendersi conto di come i pixel laterali siano interessati in
maniera marginale dalla radiazione luminosa; il valore più alto di ∆V è raggiunto dal
pixel “up” che raggiunge circa i 7 mV di caduta.
È inoltre possibile notare come si abbiano due gruppi di curve; rifacendoci alla
fig 4.2 è infatti logico pensare che i pixel “up”, “down”, “sx”, “dx” ovvero quelli
disposti sopra, sotto, a sinistra e a destra del “centrale” rispettivamente, abbiano la
capacità di raccogliere più cariche rispetto ai pixel restanti (“upsx”, “updx”, “downdx”
e “downsx”) disposti agli angoli della struttura. Questo è dovuto semplicemente al fatto
che il primo gruppo ha una minore distanza dalla zona in cui avviene la generazione
delle coppie elettrone-lacuna.
Andando ad indagare le grandezze microscopiche e in particolare la densità di corrente totale all’interno della struttura simulata (vedi fig 4.5), possiamo vedere come la
gran parte della corrente sia localizzata nella zona del pixel centrale dove abbiamo i
colori più caldi.
Consideriamo ora un’altra posizione dello spot, portiamo i valori della finestra
SemWindow da ((-0.2 -0.2) (0.2 0.2)) a ((2.3 -0.2)(2.7 0.2)) che equivale a
spostarsi di 2,5 µm lungo l’asse x.
L’andamento della tensione (vedi fig 4.6) è del tutto analogo a quello che abbiamo
visto in precedenza ma dobbiamo fare alcune distinzioni. Innanzitutto vediamo che c’è
59
Figura 4.5: Densità di corrente all’interno della struttura in 4 istanti di tempo: in senso
orario dalla sinistra in alto t = 0.9999 µs, t = 1.00005 µs, t = 1.0001 µs e t = 1.05 µs.
Figura 4.6: Andamenti della tensione dei pixel laterali per lo spot posizionato a +2,5
µm lungo x.
60
una curva che comincia a spiccare tra quelle dei pixel laterali, ed è quella relativa al
pixel che sta a destra del centrale ovvero quello a cui ci stiamo avvicinando con lo spot;
il ∆V registrato da questo fotodiodo è pari a 11 mV . Le curve dei contatti “upsx” e
“downdx” denotano invece una caduta di tensione minore data che sono dei pixel da
cui lo spot si sta allontanando di più.
L’altro aspetto da considerare è il fatto che contrariamente a quanto ci saremmo
aspettati il pixel centrale presenta una caduta di tensione maggiore (∆V = 56 mV )
del caso precedente.
Questo fatto può essere spiegato considerando la presenza di effetti di bordo che
sono presenti in questo tipo di simulazione; ciò significa che, considerando una struttura
limitata come quella presa in esame, le cariche che vengono generate al suo interno
dal modello ottico, una volta che arrivano al bordo della struttura, invece di uscire
tornano dentro contribuendo ad una raccolta di cariche maggiore e quindi ad un ∆V più
grande. Questo fenomeno è intrinseco al modello che il simulatore adotta ed è quindi
una limitazione che esso ci impone deteriorando in parte l’accuratezza dei risultati
ottenuti. Tuttavia, tenendo conto di questo problema, possiamo comunque continuare
a fare un’analisi comparativa dei risultati su questa struttura prima di pensare di
modificare la struttura per minimizzare (in parte) questi effetti indesiderati.
Spostiamo ora lo spot di altri 2,5 µm lungo l’asse x e andiamo quindi nel punto
medio tra il pixel “centrale” e il “dx”.
Figura 4.7: Andamenti della tensione dei pixel per lo spot posizionato a +5 µm lungo
x.
In fig 4.7 vediamo come ora il grafico della tensione del pixel “dx” stia sotto a quello
61
relativo al centrale; i pixel che stanno sul lato sinistro (“upsx”, “sx” e “downsx”) sono
invece quelli che riportano una caduta di tensione più bassa data la loro distanza dal
punto in cui avviene la generazione ottica.
Figura 4.8: Andamenti della corrente dei pixel “dx” e “centrale” a +5 µm lungo x.
È interessante vedere in questo caso gli andamenti della corrente relativa ai pixel
“dx” e “centrale” (vedi fig 4.8), è possibile infatti notare come l’impulso di corrente che
attraversa il fotodiodo a destra sia più grande presentando un’area sottesa maggiore e
quindi una raccolta di carica più elevata rispetto al fotodiodo centrale.
Per capire meglio come varia la raccolta di carica, e quindi il ∆V , del fotodiodo
centrale al variare dello spostamento dello spot lungo l’asse x osserviamo il grafico di fig
4.9; vediamo come dopo una prima parte in cui la caduta di tensione rimane pressoché
costante (eccezion fatta per ∆x = 0) la curva vada decrescendo fino al valore minimo
per uno spostamento di 5 µm dal centro della struttura.
Fino ad ora abbiamo considerato spostamenti della finestra di generazione solamente nella direzione x, ripetendo le stesse simulazioni con spostamenti lungo l’asse y
otteniamo dei risultati del tutto analoghi.
In fig 4.10 vediamo infatti come la caduta di tensione del pixel centrale abbia un
andamento del tutto simile a quello di fig 4.9. Per quanto riguarda invece i pixel
laterali (vedi fig 4.11) vediamo come questa volta spicchi l’andamento del fotodiodo
“down” (come succedeva prima con “dx”) in quanto all’aumentare del ∆x aumenta
considerevolmente il ∆V partendo da un minimo di 6 mV (∆x = 0 µm) ad un massimo
di 41 mV (∆x = 5 µm).
62
Figura 4.9: Andamento del ∆V del pixel centrale in funzione dello spostamento delo
spot lungo x
Figura 4.10: Andamento del ∆V del pixel centrale in funzione dello spostamento dello
spot lungo l’asse y
63
Figura 4.11: Andamenti del ∆V dei pixel laterali in funzione dello spostamento dello
spot lungo l’asse y
Figura 4.12: A sinistra abbiamo la generazione ottica all’interno della struttura. A
destra abbiamo degli istogrammi relativi ai ∆V (in V) dei nove pixel per uno spot
posizionato a (+5,+5). Partendo dal primo in basso a destra e andando in senso orario
abbiamo: “downsx”, “sx”, “upsx”, “up”, “updx”, “dx”, “downdx” e “down” oltre al
“centrale”.
64
Vediamo ora che comportamento abbiamo se ci mettiamo nel punto (+5 µm,+5
µm) cioè nel punto che sta nel mezzo tra i pixel “centrale”, “dx”, “downdx” e “down”
(vedi fig 4.12).
Si intuisce bene guardando gli istogrammi che questi quattro pixel sono naturalmente i maggiori interessati nella raccolta di cariche e si può vedere inoltre come il pixel
“upsx” sia quello che registri la caduta di tensione più bassa. I pixel “dx” e “down” si
attestano all’incirca sullo stesso valore di ∆V (∼ 28 mV ), il centrale rimane a 20 mV
mentre quello che raccoglie di più è il “downdx”, ovvero il fotodiodo in basso a destra,
che raggiunge i 37 mV .
Sebbene quindi la finestra di generazione sia localizzata in un punto equidistante a
quattro differenti pixel abbiamo delle differenze tra le risposte; tale comportamento può
essere sicuramente imputato al problema già citato degli effetti di bordo, soprattutto
se pensiamo al pixel che sta nell’angolo della struttura (“downdx”).
Figura 4.13: Mappatura completa della struttura al variare della posizione della finestra
di generazione.
Per completare la mappatura, e quindi avere una caratterizzazione più esaustiva
della struttura considerata, facciamo variare lo spot all’interno del quadrato di fig 4.2
per coprirne l’intera area.
65
Coma abbiamo già accennato la struttura gode di proprietà di simmetria che consentono di eseguire le simulazioni su un quarto dell’area totale; in fig. 4.13 abbiamo
un grafico in 3 dimensioni che riporta la caduta di tensione del pixel centrale al variare
dello spot su un quadrato di lato 10 µm con i ∆x e ∆y che variano tra -5 e 5 µm.
Questo grafico è stato ottenuto sfruttando i soli risultati ottenuti facendo variare lo
spot nel quadrante in cui x > 0 e y > 0.
4.2
Struttura “small” completa
Per poter contrastare il problema degli effetti di bordo la prima soluzione che può
venire in mente è quelle di considerare una struttura più grande in cui le pareti che
la delimitano stanno il più lontano possibile dalla regione spaziale in cui avviene la
generazione ottica.
Per fare questo occorre puntualizzare il grande svantaggio che questo comporta.
Avendo a che fare infatti con una struttura di dimensioni maggiori, avremo sicuramente
una mesh con un numero di punti maggiore a parità di parametri di configurazione;
questo si riflette direttamente sul tempo necessario per completare le simulazioni.
Figura 4.14: Struttura small completa.
La struttura presa in considerazione d’ora in poi sarà quella di fig 4.14. Come
vediamo la geometria dei pixel è la stessa di prima, essendo sempre una struttura small,
ma ora abbiamo i nove fotodiodi nella loro interezza. Per quanto riguarda i profili di
66
drogaggio possiamo dire che sono consistenti con quelli utilizzati in precedenza, le
dimensioni del parallelepiedo ovviamente variano passando a 30 x 30 x 50 µm per una
mesh di circa 9700 punti.
L’elevato numero di punti attribuiti alla discretizzazione spaziale e l’impossibilità
di agire sui parametri di discretizzazione temporale, dati i motivi esposti nel capitolo
3, ci porta a considerare la possibilità di effettuare un numero minore di simulazioni
rispetto a quanto fatto con la struttura precedente.
Considerando sempre il quadrante in cui x e y sono positive, facciamo degli spostamenti della finestra di generazione di 1 µm per volta (non 0.5 µm come prima) fino ad
un massimo di 5. Stiamo ovviamente considerando lo stesso tipo di stimolo e quindi
sarà utilizzata la stessa sezione OptBeam fin qui considerata.
Vediamo innanzitutto qual’è la risposta per lo spot che colpisce il centro della
superficie superiore della struttura e quindi il fotodiodo centrale.
Figura 4.15: Grafici della tensione dei pixel al variare del tempo per una finestra di
generazione centrata in (0,0). A destra abbiamo un particolare degli andamenti dei
pixel laterali.
In fig 4.15 vediamo come gli andamenti, in termini di tensione, siano del tutto simili
a quelli già visti per la struttura del paragrafo precedente; in particolare notiamo anche
qua la massima caduta di tensione per il pixel che viene colpito in pieno mentre i restanti
fotodiodi registrano piccole cadute: i pixel “up”, “down”, “dx” ed “sx” restituiscono
un ∆V di circa 3 mV mentre i restanti di circa 2 mV .
Possiamo però registrare una differenza in termini quantitativi soprattutto per
quanto concerne la caduta di tensione del fotodiodo centrale; nella struttura più piccola
esso restituiva un ∆V di 48 mV mentre ora abbiamo un valore di 38 mV . Questo denota
una raccolta di carica minore che può essere direttamente imputabile ad una riduzione
degli effetti di bordo rispetto al caso precedente ed è quindi possibile aspettarsi dei
risultati un pò più accurati utilizzando la struttura completa.
Vediamo ora come varia la risposta del pixel centrale per degli spostamenti effettuati
lungo l’asse delle x; l’andamento di fig 4.16 è anche in questo caso analogo a quello che
67
Figura 4.16: Andamento del ∆V del pixel centrale in funzione dello spostamento della
finestra lungo l’asse x.
abbiamo visto nel paragrafo precedente ed è possibile notare come, sebbene siano stati
attenuati, siano comunque presenti dei piccoli effetti di bordo che fanno aumentare,
anche se in modo lieve, la caduta di tensione per alcuni valori di ∆x diversi da 0.
Se facciamo variare la posizione della finestra lungo l’asse y otteniamo un andamento
del tutto corrispondente a quello di fig 4.16, ma questo ce lo potevamo aspettare data
la natura simmetrica della struttura che stiamo ora considerando.
Vediamo in particolare cosa succede quando posizioniamo la finestra di generazione
nella posizione (0,5), ovvero nel punto medio tra il pixel centrale e il pixel “down”.
Figura 4.17: Andamento della tensione dei fotodiodi per una finestra posizionata in
(0,5).
68
È interessante soprattutto confrontare questo grafico con quello di fig 4.7 dove, in
condizioni analoghe per posizione della finestra (a metà tra due pixel), avevamo che la
caduta di tensione del pixel laterale superava quella del pixel centrale. In questo caso
invece abbiamo che il pixel centrale e il pixel “down” forniscono un ∆V quasi identico,
abbiamo infatti 22 mV per quanto riguarda il primo e 20 mV per il secondo.
Questo fatto può anche in questo caso essere interpretato come risultato della modifica effettuata alla struttura che, essendo più grande, consente di allontanare le pareti
di contorno dal punto in cui avviene la generazione ottica rendendo poco influenti gli
effetti di bordo.
Dopo esserci mossi lungo le direzioni degli assi x e y vediamo ora come rispondono
i pixel a stimoli ottici che colpiscono in punti qualsiasi del quadrante del piano in cui
x e y sono positivi.
Figura 4.18: Andamenti della tensione dei fotodiodi “centrale”, “down”, “dx” e
“downdx” per una finestra di generazione posizionata in (3,3).
In fig 4.18 abbiamo il particolare degli andamenti della tensione dei quattro pixel
che sono più prossimi alla zona in cui avviene la generazione ottica e che quindi sono
maggiormente interessati alla raccolta di cariche. Possiamo vedere come sia sempre il
pixel centrale ad effettuare la gran parte della raccolta fornendo un ∆V di circa 40
mV ; abbiamo poi un gruppo di due pixel (“down” e “dx”) che ci danno all’incirca 8
mV ciascuno mentre per ultimo abbiamo il pixel “downdx”, il più lontano dei quattro
dal punto della generazione, il quale fa registrare un ∆V di soli 5 mV .
Spostiamoci ancora e posizioniamoci nel punto equidistante da questi quattro pixel,
centriamo quindi la finestra nel punto (5,5). In fig 4.19 abbiamo i grafici della tensione
di tutti e nove i pixel della struttura e risulta facile vedere come effettivamente abbiamo
69
Figura 4.19: Andamenti della tensione dei fotodiodi in funzione del tempo per una
finestra di generazione posizionata in (5,5).
quattro curve che si staccano dalle altre che fanno registrare cadute di tensione che
vanno da 1 mV ad un massimo di 3.
Le cadute di tensione dei quattro pixel adiacenti alla finestra di generazione fanno
invece registrare dei valori più alti: 16 mV il centrale, 13 mV il “dx”, 14 mV il “down”
e 12 mV il “downdx”. Ciò denota una andamento molto vicino delle curve, molto
prossimo quindi a quello che dovrebbe essere l’andamento reale.
Una prova ulteriore è l’andamento della corrente di questi quattro pixel che è riportata in fig 4.20; in questi grafici è possibile apprezzare la corrispondenza con quelli
di fig 4.19 in termini di ampiezza dell’impulso registrato dai fotodiodi.
Le piccole differenze in termini quantitativi dei vari ∆V possono essere causa (in
parte) della discretizzazione spaziale scelta per questa struttura che, come abbiamo già
detto, richiede un gran numero di punti; in questo senso, pur sapendo che è sicuramente
possibile ottenere dei risultati più accurati con una mesh più fitta, possiamo ritenerci
soddisfatti del setup utilizzato per questa serie di simulazioni.
Per vedere meglio l’interessamento dei quattro pixel di quest’ultima simulazione
presa in considerazione è utile osservare l’andamento della densità di corrente all’interno della struttura mostrato in fig 4.21 per quattro istanti di tempo di simulazione
differenti4 ; la figura in realtà mostrà la densità della corrente nella sola superficie della
struttura per una più semplice visualizzazione.
Come al solito i colori più caldi sono un indice di maggiore intensità di densità di
corrente che fluisce e in questo senso saltano subito all’attenzione i quattro fotodiodi
4
ricordiamo che l’istante in cui avviene la generazione ottica è sempre t = 1 µs.
70
Figura 4.20: Andamenti della corrente dei fotodiodi “centrale”, “dx”, “down” e
“downdx” per una finestra di generazione posizionata in (5,5).
Figura 4.21: Densità di corrente all’interno della struttura in 4 istanti di tempo: in
senso orario dalla sinistra in alto t = 0.9999 µs, t = 1.00005 µs, t = 1.0001 µs e
t = 1.05 µs.
71
in basso a destra delle immagini.
Figura 4.22: Mappatura completa della struttura al variare della posizione della finestra
di generazione.
In fig 4.22 infine abbiamo una rappresentazione grafica in tre dimensioni dell’andamento del ∆V in funzione della posizione della fiestra di generazione nella sezione del
piano xy presa in considerazione in questa serie di simulazioni. Anche in questo caso è
stato possibile sfruttare la simmetria della struttura per estrapolare i valori nelle zone
in cui non sono state effettivamente eseguite le simulazioni.
4.3
Struttura “large”
Dopo aver studiato la struttura small passiamo ora all’analisi della large partendo
innanzitutto da una descrizione della sua costruzione.
La caratteristica che è peculiare di questa seconda soluzione realizzativa è la geometria particolare dei singoli fotodiodi (vedi fig 4.23); essi hanno a disposizione un’area
attiva (zona n) più estesa rispetto ai pixel della small e hanno quindi una distanza
ridotta tra celle adiacenti (1 µm invece di 5 µm).
Le dimensioni del parallelepipedo rimangono quelle di prima (30 x 30 x 50 µm) ma
per quanto riguarda i profili di drogaggio è stato necessario effettuare una modifica.
Essendo infatti i fotodiodi molto vicini, se utilizziamo gli stessi parametri utilizzati
nella struttura small avremo che non sarà possibile distinguere le nove zone attive in
72
Figura 4.23: Geometria del singolo pixel della struttura “large” (i valori delle misure
sono in µm).
quanto la funzione analitica che viene utilizzata dal software ha un certo coefficiente che
descrive la diffusione laterale; questo coefficiente non è altro che la deviazione standard
di una funzione gaussiana.
Figura 4.24: Struttura large.
Più questo parametro è grande e più avremo una diffusione laterale, più invece
sarà piccolo e meno dispersione avremo. Nel caso della small era stato utilizzato una
deviazione standard pari a 0,8, ma se usiamo questo valore per la large non saremo
in grado di distinguere i pixel in quanto avremo che la zona attiva di un cella andrà a
sovrapporsi a quelle adiacenti. Utilizzando un fattore molto più piccolo (ad es. 0,01)
otteniamo una buona definizione della geometria desiderata (vedi fig 4.24).
Dopo aver eseguito la simulazione quasistazionaria abbiamo eseguito una serie di
simulazioni tempo-varianti utilizzando sempre lo stesso stimolo e quindi sempre gli stessi parametri di OptBeam ad eccezione di SemWindow che abbiamo variato per spostare
la finestra di generazione ottica.
73
I risultati ottenuti hanno mostrato che, con la struttura realizzata in questo modo, i
fotodiodi risultano praticamente cortocircuitati in quanto gli andamenti della tensione
risultano tutti identici e sovrapposti; i ∆V registrati si attestano ad un valore di circa
6 mV .
Questo problema è dovuto al fatto che, pur avendo agito sul fattore di diffusione
laterale, le zone attive vanno comunque a sovrapporsi in parte realizzando quindi un
collegamento elettrico che cortocircuita tutti e nove i fotodiodi.
Per poter ovviare a questo inconveniente possiamo pensare di inserire delle p − well
aggiuntive per dividere in maniera netta i nove pixel (vedi fig 4.25).
Figura 4.25: Struttura large corretta con l’aggiunta di p − well per l’isolamento delle
zone attive.
Queste zone p supplementari sono state realizzate usando gli stessi parametri dei
profili analitici utilizzati per le zone attive di tipo n comprese le concentrazioni di picco
(1019 atomi/cm3 ) e il fattore di diffusione laterale.
Considerata la grandezza della struttura e la necessità di vedere nel dettaglio le
forme delle particolari zone attive, la mesh utilizzata in questa serie di simulazioni è
composta da quasi 13000 punti rendendo ancora più lungo il tempo di esecuzione.
Vediamo la prima simulazione che riguarda un finestra di generazione centrata in
(0,0) (vedi fig 4.26).
La prima cosa che si può notare da queste curve, soprattutto confrontandole con
quelle viste finora con le simulazioni effettuate con la struttura small, è che la tensione
tende a scendere blandamente col tempo dal momento in cui stacchiamo i nodi dei
catodi dei fotodiodi.
Questo effetto è singolare dato il fatto che dalla conformazione geometrica delle
giunzioni ci si potrebbe aspettare una capacità del diodo più grande rispetto alla struttura small e quindi una relativa tensione di uscita che sia in grado di mantenere un
valore pressoché costante. L’effetto contrario invece potrebbe essere una conseguenza
74
Figura 4.26: Grafico della tensione dei pixel in funzione del tempo. Spot in posizione
(0,0).
Figura 4.27: Grafico della tensione dei pixel laterali in funzione del tempo. Spot in
posizione (0,0).
75
dell’inserimento delle p − well di isolamento nella parte superiore della struttura che
potrebbero far circolare delle correnti inverse parassite aggiuntive.
Per poter quindi calcolare il ∆V occorre prima fissare un valore di tensione preso
subito prima dell’istante di generazione, questo valore è pari a 1,698 V ; occorre però
anche decidere in che istante di tempo prendere il secondo valore di tensione per poter
fare la differenza, in questo senso scegliamo di prendere la tensione @ t = 1, 3 µs, che è
anche l’istante a cui erano stati presi i valori per le strutture dei paragrafi precedenti.
Detto questo il ∆V registrato dal pixel centrale è di circa 19 mV mentre gli altri
pixel presentano valori che sono compresi tra 1 e 2 mV ; dobbiamo notare come in
questo caso si ha una caduta di tensione sul pixel principale che è circa la metà di
quella che avevamo con la struttura small, evidente quindi la differenza in termini
quantitativi.
Figura 4.28: Grafici della tensione del pixel centrale al variare del tempo per una
finestra di generazione centrata in (0,0). A sinistra abbiamo spostamenti lungo l’asse
x mentre a destra abbiamo spostamenti lungo l’asse y.
Proviamo ora a vedere, come abbiamo fatto in precedenza, qual’è la risposta del
pixel centrale se ci spostiamo di 5 µm prima lungo l’asse x e poi lungo l’asse y (vedi
fig 4.28).
Osservando le curve la prima cosa che possiamo dire è che emerge subito il fatto
che non sono simili come invece lo erano nelle strutture considerate in precedenza;
naturalmente questo comportamento deriva direttamente dal fatto che la struttura che
stiamo ora considerando non gode più di proprietà di simmetria.
Altro dato da appuntare è che la caduta di tensione registrata rimane costante (o
addirittura aumenta nel caso di spostamenti lungo l’asse y) per poi crollare improvvisamente quando arriviamo a 5 µm di distanza dal centro, ovvero nel punto medio tra
due pixel adiacenti.
76
Posizioniamo adesso la finestra di generazione sul pixel a destra (il “dx”) del centrale
(vedi fig 4.29) per vedere se questo riporta una caduta di tensione simile a quella che
avevamo avuto con il fotodiodo centrale con lo spot in (0,0).
Figura 4.29: Generazione ottica all’interno della struttura. Finestra posizionata a
(10,0)
Figura 4.30: Andamenti della tensione dei nove pixel con finestra posizionata a (10,0)
In fig 4.30 è possibile avere la conferma di questo fatto, l’andamento della tensione
del pixel “dx” è infatti del tutto analogo a quello di fig 4.26 e il valore di ∆V che
registriamo è proprio pari a 19 mV .
Proviamo ora a vedere (vedi fig 4.31) cosa succede se variamo gradualmente la
posizione dello spot dal centro (0,0) fino al pixel che sta in alto (il pixel “up”) arrivando
al punto (0,-10) e a conforntare questi risultati con quelli che otteniamo spostandoci
verso il pixel “sx” fino al punto (-10,0).
77
Figura 4.31: A sinistra grafici della caduta tensione del pixel centrale e dell’“up” in
funzione dello spostamento lungo l’asse negativo delle y. A destra invece gli andamenti
del ∆V del pixel centrale e dell’ “sx” al variare dello spostamento lungo l’asse negativo
delle x.
Figura 4.32: Andamenti della tensione dei nove pixel con finestra posizionata a (-5,0)
78
Si può notare in queste figure come ci siano delle piccole differenze degne di nota; osservando gli spostamenti verso il pixel “up” vediamo come nel punto medio tra
quest’ultimo e il fotodiodo centrale si abbia un valore più alto di ∆V per il pixel in
alto. Ciò può essere dovuto alla particolare geometria dei fotodiodi utilizzati in questa
struttura; comunque per uno spot posizionato al centro del pixel “up” otteniamo gli
stessi valori dell centrale alla posizione (0,0).
Se andiamo a vedere invece gli spostamenti verso il pixel “sx” notiamo come il punto
di intersezione delle due curve cada proprio dove abbiamo un valore di ∆x (in modulo)
pari a 5 µm; una conferma di ciò la troviamo osservando gli andamenti della tensione
dei pixel in funzione del tempo (vedi fig 4.32) dove le due curve vanno a sovrapporsi
diventando praticamente indistinguibili.
Dopo aver considerato spostamenti lungo le direzioni degli assi coordinati cerchiamo
ora di vedere come rispondono i pixel a spostamenti in diagonale. Proviamo ad esempio
a vedere cosa succede se ci spostiamo dal centro verso il pixel “downsx” lungo la
bisettrice del quadrante del piano dove x < 0 e y > 0.
Figura 4.33: Grafici della caduta di tensione dei pixel “centrale”, “down”, “sx” e
“downsx” al variare dello spostamento lungo la bisettrice del quadrante del piano xy.
In fig 4.33 vediamo, come ci aspettavamo, un primo tratto dove la gran parte della
raccolta di cariche viene operata dal pixel centrale e man mano che ci allontaniamo da
esso cominciano ad essere coinvolti sempre di più gli altri tre pixel. Nel punto in cui
la finestra è centrata in (-5,5) abbiamo che tutte e quattro le curve si ritrovano nello
stesso valore di ∆V (pari a circa 7 mV ).
Nel grafico di fig 4.34 ne abbiamo un’ulteriore conferma dagli andamenti temporali
della tensione dei fotodiodi e in fig 4.35 possiamo vedere come la densità di corrente
interessi esclusivamente i quattro pixel in prossimità della zona di generazione ottica.
79
Figura 4.34: Grafici della caduta di tensione dei pixel al variare del tempo per una
finestra di generazione centrata in (-5,5).
Figura 4.35: Densità di corrente all’interno della struttura in 4 istanti di tempo: in
senso orario dalla sinistra in alto t = 0.9999 µs, t = 1.00005 µs, t = 1.0001 µs e
t = 1.05 µs. Finestra di generazione centrata a (-5,5).
80
In particolare in quest’ultimo grafico è possibile apprezzare l’effetto delle correnti
in inversa parassite; nella figura relativa all’istante precedente alla generazione ottica
abbiamo infatti delle zone con colori caldi che denotano un passaggio di corrente di
perdita, questa comporta un deacadimento della tensione al variare del tempo.
4.4
Variazione dello stimolo ottico
Dopo aver studiato il comportamento dei pixel al variare della posizione della finestra
nel piano xy passiamo ora a vedere in che modo varia la generazione e la raccolta di
cariche al variare della lunghezza d’onda e della potenza della radiazione incidente.
La lunghezza d’onda fin qui utilizzata è stata λ1 = 783 nm che corrisponde ad
un colore rosso; nel corso della trattazione considereremo altre 3 differenti lunghezze
d’onda: 407 nm (viola), 573 nm (verde) e 1058 nm che sta nell’infrarosso.
Figura 4.36: Risposta spettrale del silicio al variare della lunghezza d’onda della
radiazione incidente.
Come ben sappiamo, grazie alla Legge di Planck, un fotone ad una certa frequenza
ha una certa energia che dipende proprio dalla frequenza del fotone stesso; nel nostro
caso stiamo considerando il caso più semplice, ovvero un fascio monocromatico di
fotoni, cioè tutti fotoni ad una sola frequenza. In generale questo non è vero dato che
si parlerà di uno spettro ma dato che il lavoro al banco ottico prevede l’utilizzo di laser,
questa approssimazione si può certamente accettare.
Fatta questa considerazione possiamo dire che più sarà bassa la lunghezza d’onda
considerata e più sarà alta l’energia del singolo fotone; ci sono però da considerare altri
fattori quali la profondità di penetrazione della radiazione all’interno della struttura e
la risposta spettrale del silicio che non è uniforme nella banda considerata ma ha un
suo andamento che, qualitativamente, è raffigurato in fig 4.36.
Nell’effettuare queste simulazioni si è fatto uso della struttura small completa e il
posizionamento della finestra al centro del pixel centrale, nelle coordinate (0,0).
81
4.4.1
Prima serie (λ1 = 783 nm)
Consideriamo la lunghezza d’onda utilizzata finora e proviamo innanzitutto a variare l’intensità della generazione ottica agendo sul parametro WavePower nella sezione
OptBeam del file des T V.cmd; chiamiamo con P la potenza di riferimento utilizzata
finora che è pari a 4 · 103 W/cm2 e fissiamo altri 4 valori rispettivamente a 0,1P, 0,5P,
2P e 10P per vedere il comportamento, in termini di dinamica del segnale di uscita,
del fotodiodo centrale.
Figura 4.37: Generazione ottica all’interno della struttura (a sinistra) e andamento del
∆V in funzione della potenza (a destra).
Nella figura 4.37 di destra è possibile vedere la caduta di tensione del fotodiodo
centrale in funzione dell’intensità della generazione ottica. La prima osservazione che
possiamo fare è relativa all’andamento lineare che emerge; è inoltre possibile notare
come la retta passi giustamente per l’origine in quanto in assenza di radiazione non
dovremmo rilevare cadute di tensione.
Figura 4.38: Andamento della tensione del pixel centrale al variare del tempo e della
potenza.
82
Per apprezzare meglio la differenza degli andamenti alle diverse potenze è possibile
notare la spaziatura tra le curve di fig 4.38 dalle quali è possibile ricavare i ∆V : 4, 19,
38, 77 e 376 mV rispettivamente per 0,1P, 0,5P, P, 2P, 10P.
4.4.2
Seconda serie (λ2 = 407 nm)
Variamo ora la lunghezza d’onda agendo sul parametro Wavelength del modello OptBeam
portandolo al valore di 407 nm, frequenza che sta al confine tra il visibile e l’ultravioletto.
In generale ci aspettiamo di avere una caduta di tensione diversa dal caso precedente, per far si di avere un ∆V simile a quello che avevamo per λ1 con la potenza P,
scegliamo un nuovo valore P di riferimento; fissiamo tale valore a circa 113·103 W/cm2 .
Figura 4.39: Generazione ottica all’interno della struttura (a sinistra) e andamento del
∆V in funzione della potenza (a destra).
In fig 4.39 possiamo vedere la grande differenza che c’è nella generazione ottica
che avviene all’interno della struttura soprattutto per quanto riguarda la profondià di
penetrazione che in questo caso non riesce a coprire tutta la profondità ma si ferma
nei primi 15-16 µm.
La diretta conseguenza di questo fatto è che il fotodiodo centrale riesce a raccogliere
più velocemente le cariche che vengono generate e i pixel laterali sono completamente
incapacitati a partecipare a questo processo facendo registrare una caduta di tensione
praticamente nulla.
Se guardiamo infatti il grafico di fig 4.40 vediamo come passi pochissimo tempo
dall’istante in cui avviene la generazione ottica e l’istante in cui la curva diventa piatta
assestandosi sul valore finale di tensione.
Per ottenere gli stessi valori di ∆V ottenuti con λ1 abbiamo visto che è stato
necessario utilizzare un valore di potenza P, di riferimento per questa serie, molto più
83
Figura 4.40: Andamento della tensione del pixel centrale al variare del tempo a potenza
P.
alto; nonostante quindi si abbia un fascio di fotoni che presenta un’energia intrinseca
più alta abbiamo una minore sensibilità, basti guardare il grafico di fig 4.36.
Approfondiremo meglio il confronto nel paragrafo 4.4.5.
4.4.3
Terza serie (λ3 = 573 nm)
La prossima lunghezza d’onda che andremo a considerare è quella relativa al verde
ovvero 573 nm; la potenza di riferimento P utilizzata in questo caso è 4, 538 · 103
W/cm2 che ci fornisce gli stessi valori di ∆V dei casi precedenti (vedi fig 4.41). Tale
valore è molto vicino a quello utilizzato per λ1 evidenziando il fatto che il coefficiente
di assorbimento del silicio per queste due frequenze è molto simile.
Figura 4.41: Generazione ottica all’interno della struttura (a sinistra) e andamento del
∆V in funzione della potenza (a destra).
84
Per quanto riguarda la profondità di penetrazione nella struttura possiamo dire che
è analoga a quella registrata per λ1 anche se si può notare una piccola decadenza nella
parte più profonda della struttura.
L’andamento della caduta di tensione in funzione della potenza di generazione è
lineare anche in questo caso, questo ci porta a pensare che siamo ancora lontani dalla
zona di saturazione, ovvero la regione di funzionamento del dispositivo in cui le curve
dovrebbero iniziare ad appiattirsi deviando dall’andamento lineare (ideale).
Figura 4.42: Andamento della tensione del pixel centrale al variare del tempo a potenza
2P.
Anche in questo caso abbiamo un’ottima velocità di raccolta e abbiamo anche qui,
come per λ2 , una prevalente maggioranza di raccolta per il pixel centrale mentre i pixel
laterali non riescono a superare 1 mV di caduta di tensione.
4.4.4
Quarta serie (λ4 = 1058 nm)
La lunghezza d’onda che prendiamo in esame ora rientra nello spettro relativo all’infrarosso; essendo più grande di tutte le altre λ considerate possiamo dire che questa
attraverserà tutta la struttura e ci aspettiamo che interagisca in modo minore rispetto
ad esempio a λ1 . Dobbiamo infatti impostare in questo caso un valore di potenza di
riferimento P pari a 97,291 ·103 W/cm2 .
La generazione, come possiamo vedere da fig 4.43, effettivamente intressa la struttra
per l’intera profondità facendo rilevare all’interno dei valori pressoché costanti.
È molto interssante in questo caso analizzare le curve della tensione in funzione
del tempo dei nove pixel (vedi fig 4.44) che mostrano innanzitutto una velocità di
raccolta minore in quanto la tensione, prima di raggiungere un valore costante impiega
un intervallo di tempo molto elevato rispetto ai casi precedenti; ciò è dovuto al fatto
85
Figura 4.43: Generazione ottica all’interno della struttura (a sinistra) e andamento del
∆V in funzione della potenza (a destra).
Figura 4.44: Andamento della tensione dei pixel in funzione del tempo per un potenza
pari a P.
86
che la generazione di coppie elettrone-lacuna avviene anche a profondità molto elevate,
e queste cariche impiegano naturalmente più tempo per essere raccolte dal campo
elettrico generato dalla giunzione.
Altra conseguenza di questo è che i pixel laterali riescono a raccogliere un numero
maggiore di cariche facendo registrare una caduta di tensione massima di 11 mV , molto
più elevata di quella che avevamo ottenuto con λ1 .
4.4.5
Confronto tra le diverse lunghezze d’onda
Le diverse simulazioni effettuate per le varie lunghezze d’onda considerate hanno evidenziato delle diversità di comportamento della struttura in termini di tensione.
Abbiamo visto come per ottenere lo stesso valore di ∆V (di circa 38 mV ) è stato necessario modulare l’intensità della radiazione incidente; questo mette alla luce
il comportamento selettivo in frequenza del silicio che come sappiamo ha una sua
caratteristica peculiare.
Figura 4.45: Grafici del ∆V al variare della potenza a diverse lunghezza d’onda.
Per poter confrontare i diversi gradi di risposta possiamo calcolare innanzitutto le
pendenze (coefficienti angolari) delle rette ∆V -Potenza mostrate nei paragrafi precedenti per ogni λ presa in considerazione; questa grandezza, che andremo a ricavare,
rappresenta in qualche modo la sensibilità del fotodiodo del sensore alla frequenza in
esame e quindi la capacità di fornire una dinamica del segnale in uscita ampia (alta
sensibilità) o ristretta (bassa sensibilità).
• λ1 = 783 nm → 9, 34 · 10−6
V
W/cm2
• λ2 = 407 nm → 3, 28 · 10−7
V
W/cm2
87
• λ3 = 573 nm → 8, 22 · 10−6
V
W/cm2
• λ4 = 1058 nm → 3, 78 · 10−7
V
W/cm2
Ecco che emerge come la sensibilità maggiore, per le frequenze utilizzati in questo
lavoro, sia raggiunta con una lunghezza d’onda di 783 nm; guardando infatti il grafico
della risposta del silicio di fig 4.36 vediamo che il picco sta proprio intorno ai quei valori
di λ.
In fig 4.45 possiamo vedere il confronto diretto tra gli andamenti a diverse lunghezze
d’onda per i seguenti valori di potenza di generazione: 2 ·103 , 3 ·103 , 4 ·103 , 8 ·103 e
12 ·103 W/cm2 .
È lampante come le curve relative a λ4 = 1058 nm e λ2 = 407 nm stiano molto più
in basso rispetto alle altre dato che hanno un coefficiente angolare di oltre un ordine di
grandezza inferiore; le curve invece per λ1 = 783 nm e λ3 = 573 nm sono molto vicine
e presentano cadute di tensione comparabili.
Altro dato che è emerso dalle simulazioni effettuate è che la velocità di raccolta del
fotodiodo centrale è maggiore se consideriamo uno stimolo con λ1 , leggermente minore
per λ2 e λ3 , e molto bassa se stiamo utilizzando λ4 che ricordiamo essere nell’infrarosso.
88
Conclusioni
In questo lavoro di tesi è stato trattato lo studio e l’analisi di modelli di generazione ottica per simulazioni di strutture tridimensionali, rappresentanti dei sensori di radiazione
a matrice di pixel attivi integrati in tecnologia CMOS.
La prima parte del lavoro è stata molto importante per la comprensione del modello utilizzato ed è stato fondamentale per poter avere sotto controllo gran parte dei
parametri in gioco in questo tipo di simulazioni.
In particolare il lavoro svolto sulla struttura “di prova” con un singolo fotodiodo e
il gran numero di simulazioni effettuate, variando mano a mano i parametri, ha permesso di evidenziare il ruolo fondamentale della discretizzazione temporale nel corretto
calcolo della generazione ottica all’interno della struttura da parte del software di simulazione. In questo senso è emerso un non corretto funzionamento che è stato oggetto
di analisi approfondita e ha portato poi alla conclusione che l’impulso di corrente, che
viene a crearsi subito dopo l’istante della generazione, deve essere sagomato in maniera
corretta, scegliendo accuratamente il valore dello step temporale massimo ammesso per
la risoluzione delle equazioni.
Una volta che è stato ben definito il setup di simulazione è stato possibile procedere
all’analisi del comportamento di strutture complesse che prevedono la presenza di più
pixel fotorivelatori. La prima variabile di studio presa in considerazione è stata la
posizione della finestra di generazione sulla superficie superiore della struttura che
abbiamo fatto variare per poter capire il diverso comportamento dei fotodiodi.
Questo tipo di indagine è stata effettuata su 3 strutture diverse; la prima e la
seconda (small ) presentano un forma dei pixel uguale (quadrata) mentre nella terza
(large) abbiamo una forma particolare della zona attiva di tipo n. La prima struttura
rispetto alla secondo è stata realizzata tagliando e quindi riducendo la seconda per
poter utilizzare una mesh con un numero minore di punti e quindi risparmiare risorse
di calcolo.
Dai risultati effettuati sulla struttura ridotta è emerso però un comportamento lievemente anomalo in quanto spostandoci dalla posizione centrale si ottiene un ∆V maggiore, cosa che può essere in parte dovuta ad effetti di bordo che degradano l’accuratezza
dei risultati.
89
Per poter quindi minimizzare, quanto possibile, questi effetti si è passato all’analisi
della struttura small completa per poter allargare la struttura ed allontanare le pareti
di confine dalla zona in cui avviene la generazione ottica. Questa scelta ha portato
ad un inevitabile incremento dei punti della mesh, aumentando quindi sensibilmente i
tempi necessari all’esecuzione delle simulazioni.
Per quanto concerne la struttura large è stato invece fondamentale l’inserimento di
p − well di isolamento intorno ai fotodiodi in quanto la distanza tra i pixel in questo
tipo di geometria è molto ridotto rispetto alla small.
Confrontando poi i risultati ottenuti con le due tipologie di struttura è emerso che
i ∆V più alti sono stati raggiunti utilizzando la soluzione small che, in alcuni casi, ha
fatto registrare cadute di tensione anche del doppio rispetto alla soluzione large.
Dopo aver lavorato sullo spostamento della posizione della finestra di generazione
siamo poi passati alla variazione di altri parametri tipici dello stimolo ottico quali la
lunghezza d’onda e la potenza. Abbiamo visto in questo caso il differente comportamento del fotodiodo al variare della frequenza dei fotoni, soprattutto a causa della
differente profondità di penetrazione che incide direttamente sul tempo necessario alla
raccolta delle cariche e influisce sul ∆V che riescono a fornire i pixel laterali (non colpiti
direttamente dalla radiazione luminosa).
Variando la potenza abbiamo poi compreso come il fotodiodo abbia una diversa
sensibilità, dovuta alle proprietà intrinseche del silicio, al variare della lunghezza d’onda
utilizzata, facendo vedere come, a parità di intensità di generazione, abbiamo una
caduta di tensione maggiore a λ = 783 nm.
Per quanto riguarda gli sviluppi futuri di questo lavoro, possiamo innanzitutto dire
che il pacchetto software Sentaurus ha a disposizione altri modelli di generazione, di
maggiore complessità implementativa ma che probabilmente permetteranno di meglio
riprodurre la realtà, ad esempio tenendo conto degli effetti di riflessione della radiazione.
Sarà poi importante poter confrontare i risultati ottenuti al simulatore con le prove
effettuate al banco ottico con le sorgenti laser in modo da avere un feedback con i dati
sperimentali e quindi avere un’ulteriore aiuto nella giusta definizione dei parametri del
modello ottico utilizzato.
90
Bibliografia
[1] Richard C. Jaeger, “Microelettronica” McGraw-Hill, 1998.
[2] Synopsys, “TCAD Sentaurus Manual, Sentaurus Structure Editor User Guide”.
[3] L. Piperku, “Simulazione 3D dei passi del processo di fabbricazione per sensori
attivi CMOS”, tesi di laurea in Ingegneria Informatica ed Elettronica, Università
degli Studi di Perugia, a.a. 2009-2010.
[4] Synopsys, “TCAD Sentaurus Manual, Sentaurus Device User Guide”.
[5] Synopsys, “TCAD Sentaurus Manual, Inspect User Guide”.
[6] Synopsys, “TCAD Sentaurus Manual, Tecplot User Guide”.
[7] R. Sbirrazzuoli, “Sviluppo di un sistema di management di ambienti di esecuzione
virtualizzati per sistemi batch”, tesi di laurea in Informatica, Università degli Studi
di Perugia, a.a. 2007-2008.
[8] K. Kanxheri, “Analisi numerica 3D di dispositivi fotosensibili per rivelatori di radiazione”, tesi di laurea in Ingegneria Informatica ed Elettronica, Università degli
Studi di Perugia, a.a. 2009-2010.
91