- M. Poli e S. Rocchi – diapositiva 1
Elettronica digitale, analogica e di potenza
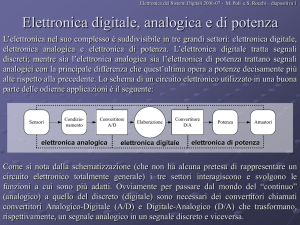
L’elettronica nel suo complesso è suddivisibile in tre grandi settori: elettronica digitale,
elettronica analogica e elettronica di potenza. L’elettronica digitale tratta segnali
discreti; mentre sia l’elettronica analogica sia l’elettronica di potenza trattano segnali
analogici con la principale differenza che quest’ultima opera a potenze decisamente più
alte rispetto alla precedente. Lo schema di un circuito elettronico utilizzato in una buona
parte delle odierne applicazioni è il seguente:
elettronica analogica
elettronica digitale
elettronica di potenza
Come si nota dalla schematizzazione (che non ha alcuna pretesa di rappresentare un
circuito elettronico totalmente generale) i tre settori interagiscono e svolgono le
funzioni a cui sono più adatti. Ovviamente per passare dal mondo del “continuo”
(analogico) a quello del discreto (digitale) sono necessari dei convertitori chiamati
convertitori Analogico-Digitale (A/D) e Digitale-Analogico (D/A) che trasformano,
rispettivamente, un segnale analogico in un segnale discreto e viceversa.
M. Poli e S. Rocchi – diapositiva 2
Alcune caratteristiche importanti dei settori
dell’elettronica
Settore
Digitale
Potenza istantanea ●
Analogico
Potenza
●●
●●●
●●
●●●
Corrente di picco ripetitiva ●
●
●●●
Corrente di picco non ripetitiva ●
●
●●●
●●
●
●
●
Rumore ●
●●●
●
Sensibilità alle condizioni operative ●
●●●
●●
●●
●●●
Tolleranze di processo ●
●●●
●
Linearità ●
●●●
●
●●
●●
Potenza media ● ●
Frequenza ● ● ●
Scala di integrazione ● ● ●
Rendimento di conversione ●
Limiti operativi in corrente e tensione ●
M. Poli e S. Rocchi – diapositiva 3
Convertitore analogico-digitale
Il convertitore analogico-digitale (abbreviato come ADC, A/D) è un circuito elettronico
il cui scopo è quello di convertire segnali analogici (tensione, corrente, carica elettrica)
in segnali discreti (digitali). La conversione analogico-digitale si compone di due passi:
campionamento e quantizzazione.
Il campionamento è l’operazione mediante la quale si estraggono campioni del segnale
ad intervalli di tempo regolari
Segnale continuo
Segnale campionato
Detta fH la massima frequenza del segnale [s(t)] da campionare, dal segnale campionato
[sc(t)] è ricostruibile il segnale originario se e solo se la frequenza di campionamento
(fS=1/∆T) è maggiore di 2 fH (teorema di Nyquist-Shannon): fS > 2fH.
M. Poli e S. Rocchi – diapositiva 4
Convertitore analogico-digitale
Dall’operazione di campionamento vengono restituiti campioni “continui” del segnale;
tali valori non possono essere rappresentati in un dominio discreto, dunque devono
essere discretizzati. La quantizzazione è l’operazione che associa ad un insieme
continuo (contenente infiniti elementi) un insieme discreto (contenente un numero finito
di valori) secondo una determinata funzione di quantizzazione.
Segnale campionato
Segnale quantizzato
Nella figura precedente si sono usati 16 livelli di quantizzazione (4 bit=24 livelli) e si è
usata una funzione di quantizzazione che associa ad ogni livello continuo il livello
discreto più prossimo. Più è alto il numero di bit utilizzati nella quantizzazione e minore
è l’errore che si commette nella quantizzazione (errore di quantizzazione), cioè si riduce
la distanza media tra il valore campionato e il corrispondente valore quantizzato.
M. Poli e S. Rocchi – diapositiva 5
Caratteristiche statiche invertitore
vi
vo
►Caratteristica di trasferimento vo/vi
►Soglia logica
►Swing logico di ingresso
►Swing logico di uscita
►Margine di rumore
M. Poli e S. Rocchi – diapositiva 6
Caratteristica di trasferimento Vo/Vi
La caratteristica di trasferimento (f.d.t.) in tensione di un invertitore è la relazione che
lega la tensione di uscita vo con la tensione di ingresso vi
vo = f (vi )
La f.d.t. si costruisce a tratti facendo riferimento ad una catena di invertitori uguali
vo,k-2
K-2
vi,k-2
v i , k +1 = v o , k
K-1
vi,k-1
vo,k
vo,k-1
K
vi,k
v o , k = f k (v i , k − 1 )
vo,k+1
K+1
vi,k+1
v o , k + 1 = f k + 1 (v i , k + 1 ) = f k + 1 (v o , k ) = f k + 1 ( f k (v i , k − 1 ))
M. Poli e S. Rocchi – diapositiva 7
vo,k = vi,k+1
Caratteristica di trasferimento vo/vi
vo ,k = f k (vi , k )
vo ,k = f k (vi ,k )
Le curve
B
vo ,k +1 = f k +1 (vi , k +1 )
vo ,k +1 = f k +1 (vi , k +1 )
hanno 3 punti di intersezione: A, B, C. Le
coordinate di A e B vengono definite valori
di ingresso nominali
A = {viHnom , voLnom }
B = {viLnom , voHnom }
C
Le coordinate del punto C, vengono definite
soglia logica (SL), cioè il punto della
caratteristica di un invertitore in cui Vo=Vi
45°
A
vi,k = vo,k-1
C = {viSL , voSL }
M. Poli e S. Rocchi – diapositiva 8
Swing logico
Si individuano inoltre i punti D e E tali che
dvo
= −1
dvi
vo
voHmin
D
vo = f (vi )
di coordinate
D = {viL max ,voH min }
E = {viH min , voL max }
Si definiscono swing logico di ingresso (ILS) e
di uscita (OLS) le seguenti grandezze
E
voLmax
viLmax
viHmin
I LS = viH min − viL max
vi
OLS = voH min − voL max
M. Poli e S. Rocchi – diapositiva 9
Zone operative dell’invertitore
La derivata dvo/dvi può essere vista come il limite per ∆vi che tende a zero del guadagno differenziale di
tensione, in altri termini
dvo
∆vo
= lim
dvi ∆vi →0 ∆vi
Da un punto di vista geometrico, quindi, dvo/dvi=-1 rappresenta quei punti in cui si ha un guadagno in
tensione unitario e invertente, ovvero quei punti in cui ad una variazione positiva/negativa dell’ingresso
corrisponde una uguale variazione negativa/positiva dell’uscita. Da queste considerazioni derivano le
seguenti:
Se vi≤viLmax oppure vi≥viHmin allora:
dvo
≤1
dvi
in tale zona l’invertitore sopprime i
disturbi (rumore) della tensione di
ingresso (proprietà rigenerativa)
Se viLmax ≤ vi≤viHmin allora:
dvo
≥1
dvi
in tale zona l’invertitore amplifica la
tensione di ingresso, l’uscita
dell’invertitore è instabile e tende ad
andare o verso voLnom, o verso voHnom.
M. Poli e S. Rocchi – diapositiva 10
Margini di rumore
Il rumore nel dominio digitale rappresenta variazioni indesiderate del valore logico di un nodo. Si definisce
margine di rumore di un invertitore il massimo livello di rumore che può essere sostenuto dall’invertitore (un
livello maggiore porta ad un malfunzionamento dell’invertitore e quindi ad un valore indeterminato del nodo
di uscita) quando è messo in cascata con un altro invertitore uguale.
vi1
vo1= vi2
I1
vo2
vi2 = vo1
I2
voHmin
viHmin2
Si definisce margine di rumore
alto (NMH) la differenza
NM H = voH min − viH min 2
viLmax2
analogamente si definisce
margine di rumore basso
(NML) la differenza
NM L = viL max 2 − voL max
NMH
NML
voLmax
vo2
viLmax
viHmin
Dal momento che i due invertitori sono uguali si ha: viHmin2 = viHmin e viLmax2 = viLmax dunque
NM H = voH min − viH min
NM L = viL max − voL max
vi1
M. Poli e S. Rocchi – diapositiva 11
Significato fisico dei margini di rumore
Supponiamo che vi1 sia basso (vi1≤viLmax), di conseguenza vo1= vi2 è alto (vo1≥voHmin, vi2 ≥viHmin) e vo2 è basso
(vo2≤voLmax). Adesso ipotizziamo che per qualche ragione (rumore) il nodo vo1 subisca una variazione di
tensione superiore a NMH+δ e che dunque si posizioni ad un livello pari a voE. Quale sarà il valore di tensione
di uscita vo2? Inizialmente vo2 avrà un valore vo2E, ma tale valore, come discusso in precedenza, si trova in una
zona di instabilità della caratteristica, quindi dopo un certo transitorio, vo2 tenderà o a voLnom oppure a voHnom.
Il problema risiede nel fatto che a priori non è possibile stabilire a quale valore tende, dando così una
indeterminazione funzionale non voluta in un circuito digitale.
Da questa breve considerazione si deduce che i margini di rumore sono delle variazioni di tensione superate
le quali non è più garantito il funzionamento del circuito digitale.
vi1
vo1= vi2
I1
vo2
I2
vi2 = vo1
δ
voHmin
NMH
viHmin2
voE
viLmax2
NML
voLmax
vo2
vo2E
viLmax
viHmin
vi1
M. Poli e S. Rocchi – diapositiva 12
Potenza media statica
Siano IoL e IoH rispettivamente le correnti (statiche) erogate dalla tensione di alimentazione VDD in
corrispondenza delle tensioni nominali di uscita voLnom e voHnom. Si definisce potenza media statica la quantità
PST = VDD
I oL + I oH
2
VDD
vo
IoH
voHnom
INV
voHnom
VDD
IoL
INV
voLnom
voLnom
vi
M. Poli e S. Rocchi – diapositiva 13
Fan-in e fan-out
►Si definisce fan-in il numero massimo di ingressi ad una
porta logica che ne garantiscono il funzionamento
►Si definisce fan-out il numero massimo di porte logiche che
una data porta può pilotare garantendo il suo funzionamento
fan-in
Con riferimento allo specifico caso riportato in figura,
entrambe le definizioni sono associate all’invertitore INV;
in tal caso il fan-in e il fan-out sono, rispettivamente, il
numero massimo di invertitori che possono pilotare e
essere pilotati da INV mantenendo il suo funzionamento
logico corretto. Ciascun invertitore (così come tutte le
porte logiche) ha una capacità di ingresso e una capacità
di uscita. Le capacità di uscita degli invertitori Ii1…Iim
contribuisco ad aumentare la capacità in ingresso a INV,
mentre quelle di ingresso di Io1…Ion aumentano la sua
capacità di uscita. Si comprende quindi come
all’aumentare di m e n si possa raggiungere un carico
capacitivo di ingresso/uscita non più sostenibile da INV:
in altri termini trattandosi di un invertitore questo
significa che INV non effettuerebbe più correttamente
l’inversione dell’ingresso.
fan-out
Ii1
Io1
Ii2
Io2
Iim
INV
Ion
M. Poli e S. Rocchi – diapositiva 14
Caratteristiche dinamiche invertitore
vi
vo
►Tempo di salita
►Tempo di discesa
►Ritardo di salita (tempo di propagazione basso-alto)
►Ritardo di discesa (tempo di propagazione alto-basso)
►Ritardo di propagazione (tempo di propagazione)
M. Poli e S. Rocchi – diapositiva 15
Caratteristiche dinamiche invertitore
Si consideri un invertitore k inserito in una catena di invertitori come riportato in figura. Siano note CI e CO,
rispettivamente la capacità di ingresso e di uscita di tale invertitore, allora è possibile trovare un circuito
equivalente al precedente sostituendo all’ingresso e all’uscita di k i carichi capacitivi equivalenti (CT e CL):
vi
k+1
k-1
vi
k
vo
k+2
CO + C I = CT
k
vo
C L = CO + n ⋅ C I
vi
vo
t
k+n
t
Ovviamente la presenza di capacità di ingresso e di uscita altera il funzionamento del circuito portando a
delle distorsioni delle forme d’onda di ingresso e uscita. La capacità CT è la somma di due capacità
solitamente sufficientemente piccole da non causare distorsioni in vi, mentre la capacità CL è tale da causare
distorsioni nella forma d’onda di uscita (vo). Chiaramente questo è solo un esempio, a seconda dell’entità dei
carichi capacitivi equivalenti si hanno più o meno distorsioni.
M. Poli e S. Rocchi – diapositiva 16
Tempi di salita e di discesa
Con riferimento alla figura, si individuino i punti in cui vo è pari al 90% e al 10% della massima escursione in
tensione di uscita (vOH - vOL); vo raggiunge i suddetti valori rispettivamente nei tempi tf90, tf10 per la transizione
alto-basso e tr90, tr10 per quella basso-alto.
vi
vo
vOH
tir
tif
t
vO90%=vOL+0.9(vOH-vOL)
vO10%=vOL+0.1(vOH-vOL)
vOL
tf90
tf10 tr10
tr90
t
Si definisce tempo di salita tr la differenza tr90-tr10
t r = t r 90 − t r10
Si definisce tempo di discesa tf la differenza tf10-tf90
t f = t f 10 − t f 90
M. Poli e S. Rocchi – diapositiva 17
Esempio di calcolo del tempo di salita/discesa
In un modello semplificato dell’invertitore, per il teorema di Thevenin, l’uscita dell’invertitore può essere
vista come un generatore di tensione con in serie una resistenza. Quanto l’uscita dell’invertitore transita da
basso (vOL ) a alto (vOH) il generatore di tensione equivalente di Thevenin è pari a vOH, quanto transita da alto
(vOH) a basso (vOL ) il suo valore è nullo. Dunque si ha
R
k
CL
vEQ
cL
Supponendo per semplicità che vOH = VDD e vOL = 0, il tempo di salita/discesa si calcola come segue.
Rr
0
VDD
Rf
VDD
cL
cL
t −tif
−
tr 90% − tif = − ln(0.1) ⋅ Rr CL ≅ 2.3Rr CL
Rr CL
⇒
⇒ vO = VDD 1 − e
tr10% − tif = − ln(0.9) ⋅ Rr CL ≅ 0.1Rr CL
⇒ vO = VDDe
−
t −tir
R f CL
⇒
⇒ tr ≅ 2.2Rr CL
t f 90% − tir = − ln(0.9) ⋅ R f CL ≅ 0.1R f CL
⇒ t f ≅ 2.2R f CL
t f 10% − tir = − ln(0.1) ⋅ R f CL ≅ 2.3R f CL
Si noti che l’invertitore è stato modellato con due diverse resistenze equivalenti per la transizione basso-alto
(Rr) e per quella alto-basso (Rf) dato che, in generale, non è detto che l’invertitore abbia un comportamento
“simmetrico” nelle due transizioni. Nel caso in cui l’invertitore sia simmetrico e quindi Rr = Rf = R si ha
t r = t f ≅ 2.2 RC L
M. Poli e S. Rocchi – diapositiva 18
Ritardi di salita e di discesa
Analogamente a quanto fatto prima, si individuino i punti in cui vo è pari al 50% della massima escursione in
tensione di uscita (vOH - vOL); vo raggiunge i suddetti valori rispettivamente nei tempi tof50 per la transizione
alto-basso e tor50 per quella basso-alto. Si individuino inoltre i punti in cui vi è pari al 50% della massima
escursione in tensione di ingresso (vIH - vIL); vi raggiunge i suddetti valori rispettivamente nei tempi tif50 per la
transizione basso-alto e tir50 per quella alto-basso (vi è un’onda quadra quindi tali valori coincidono con
l’inizio delle transizioni).
vi
Si definisce ritardo di salita τpLH o
tempo di propagazione basso-alto
vIH
τ pLH = tor 50 − tif 50
vIL
vo
tir50
tif50
t
vOH
vO50%=vOL+0.5(vOH-vOL)
Si definisce ritardo di discesa τpHL
o tempo di propagazione altobasso
τ pHL = tof 50 − tir 50
vOL
τpLH
tof50
τpHL
tor50
t
Si definisce inoltre ritardo di propagazione τpd o tempo di propagazione la quantità
τ pd =
τ pLH + τ pHL
Nel caso di invertitore simmetrico si parla solo di tempo di propagazione e si ha τpLH = τpHL = τpd.
2
M. Poli e S. Rocchi – diapositiva 19
Esempio di calcolo del tempo di propagazione
Come fatto in precedenza si usa il seguente modello semplificato dell’invertitore
R
k
CL
vEQ
cL
e per semplicità si suppone che vOH = VDD e vOL = 0, quindi
Rr
0
VDD
Rf
VDD
cL
cL
t − tif 50
−
Rr C L
⇒ vO = VDD 1 − e
⇒ τ pLH = − ln (0.5) ⋅ Rr CL ≅ 0.69 Rr C L
⇒ vO = VDD e
−
t − tir 50
R f CL
⇒ τ pHL = − ln (0.5) ⋅ R f C L ≅ 0.69 R f CL
Come nel caso precedente, l’invertitore è stato modellato con due diverse resistenze equivalenti per la
transizione basso-alto (Rr) e per quella alto-basso (Rf).
Nel caso in cui l’invertitore sia simmetrico e quindi Rr = Rf = R si ha
1
1
τ pd = τ pLH = τ pHL ≅ 0.69 RC L ≅ t r = t f
3
3
M. Poli e S. Rocchi – diapositiva 20
Stima della massima frequenza operativa
Sia T il periodo (f = 1/T la frequenza) dell’onda quadra in ingresso all’invertitore, quale è il minimo periodo
consentito (la massima frequenza consentita) affinché il funzionamento dell’invertitore sia garantito?
Il funzionamento dell’invertitore è garantito quando è possibile ricostruire il segnale digitale di uscita, in altri
termini quando è possibile discernere lo stato alto dell’uscita da quello basso. Dunque è sufficiente garantire
che una transizione basso-alto dell’ingresso porti l’uscita al di sotto della soglia logica vSL e che una
transizione alto-basso dell’ingresso porti l’uscita al di sopra della soglia logica: da questi punti in poi,
trovandosi l’uscita in una zona di instabilità, tenderà a convergere verso i punti stabili (voHnom, voLnom) più
vicini al valore di tensione iniziale. In realtà, come si è discusso in precedenza, la zona di instabilità non dà
assoluta garanzia del funzionamento dell’invertitore, quindi il metodo precedente offre una stima per eccesso
della massima frequenza operativa.
vo
voHnom
45°
voLnom
vSL
vi
M. Poli e S. Rocchi – diapositiva 21
Stima della massima frequenza operativa
Una stima più conservativa (per vi
difetto) si può ottenere garantendo
per l’uscita dell’invertitore un tempo
maggiore della somma del tempo di
salita e del tempo di discesa (tr + tf);
in tal caso infatti ci si troverebbe
nella condizione limite in cui
l’uscita è molto simile ad un’onda vo
triangolare. Dunque
Tmin
Tmin ≥ tr + t f ≅ 2.2 ⋅ C L (Rr + R f )
tf90 tf10
Garantendo un ulteriore 20% di margine la stima di Tmin risulta
tr10
t
tr90
Tmin = 1.2 ⋅ 2.2 ⋅ CL (Rr + R f ) = 2.64 ⋅ C L (Rr + R f )
Che nell’ipotesi di invertitore simmetrico diviene
Tmin = 5.28 ⋅ RCL
t
M. Poli e S. Rocchi – diapositiva 22
Dissipazione di potenza
In un circuito digitale (e non solo) la dissipazione di potenza è strettamente legata la calore dissipato dal
circuito e all’energia richiesta da ciascuna operazione, quindi è legata a
►Numero di dispositivi integrabili per chip
►Tipo di package
►Tipologia di sistema di raffreddamento richiesta
►Massima tensione e massima corrente richieste
Mentre il “Numero di dispositivi integrabili per chip” è un problema che riguarda tutte le tipologie di circuiti
digitali perché, in genere, si vuole la più alta scala di integrazione possibile, per quanto riguarda gli altri punti
essi sono legati alle applicazioni specifiche. Ad esempio per un circuito digitale che viene utilizzato in un
dispositivo portatile sono di primaria importanza il package (più piccolo possibile per ridurre le dimensioni),
la tipologia di raffreddamento (sempre per evitare dimensioni e pesi troppo elevati) e la massima tensione e
corrente richieste (per consentire una maggiore durata della batteria); mentre per un sistema non portatile è di
primaria importanza la tipologia di raffreddamento (il package non è rilevante in quanto si presume si abbia
tutto lo spazio che si vuole per realizzare il circuito; la massima tensione e corrente non sono rilevanti perché
si suppone che l’alimentazione provenga dalla tensione di rete). In definitiva, dunque, la dissipazione di
potenza coinvolge la realizzabilità, il costo e l’affidabilità di un circuito digitale.
M. Poli e S. Rocchi – diapositiva 23
Contributi alla dissipazione di potenza
Dato un circuito digitale sia Va la tensione di alimentazione (costante) e ia(t) la corrente da
essa erogata. Si definisce potenza istantanea P(t) il prodotto
Va
P(t ) = Va ⋅ ia (t )
ia(t)
Circuito
digitale
tale potenza è la potenza erogata, istante per istante, dall’alimentazione. Si definisce potenza
di picco Ppeak il massimo della potenza istantanea o in altri termini il prodotto della massima
corrente (ipeak) erogata dall’alimentazione per la tensione di alimentazione stessa Va
Ppeak = max (P(t )) = i peak ⋅ Va
La potenza istantanea è dunque quella grandezza che determina la massima corrente richiesta dal circuito.
Quasi tutti i circuiti digitali (sono rare le eccezioni) posseggono un clock che ne scandisce le operazione.
Detto T il periodo (frequenza f = 1/T) di clock di un circuito digitale si definisce potenza media Pavg la
potenza dissipata dal circuito in un periodo di clock
Pavg
1
=
T
Va
∫0 Va ⋅ ia (t )dt = T
T
∫ i (t )dt
T
0
a
Com’è facile intuire, alla potenza media sono legati la “tipologia di sistema di raffreddamento“ e la massima
tensione di alimentazione richiesta e dunque la durata della batteria nei dispositivi portatili è strettamente
correlata ad essa.
M. Poli e S. Rocchi – diapositiva 24
Potenza dinamica
EH = ∫ VDD ⋅ ic (t )dt = VDD ∫ ic (t )dt
Durante una transizione basso-alto l’energia totale EH erogata dall’alimentazione è
VDD
∞
ic
INV
∞
= VDD ⋅ C L ∫
0
0
vOH
vOL
dV = VDD ⋅ C L ⋅ (vOH − vOL )
cL dove con vOH e vOL si è indicata, rispettivamente, la tensione di uscita massima e
minima. Solo metà dell’energia totale erogata viene immagazzinata (e quindi non
viene persa) in CL il resto viene dissipata (e quindi persa) dai dispositivi che
compongono l’invertitore.
VDD
Durante la transizione alto-basso CL perde la carica immagazzinata
precedentemente (e quindi l’energia ad essa associata) che viene dissipata nei
dispositivi usati per scaricare il condensatore: in questa fase l’alimentazione non
INV
fornisce energia. Quindi durante una transizione completa basso-alto-basso
cL
l’energia EL→H →L dissipata è
ic
E L→ H → L = VDD ⋅ C L ⋅ (vOH − vOL )
Dato il clock di periodo T (f = 1/T) si definisce potenza dinamica Pd =
Nel caso in cui vOH = VDD e vOL = 0 la potenza dinamica diviene
EL → H → L
= VDD ⋅ C L ⋅ (vOH − vOL ) ⋅ f
T
2
Pd = VDD
⋅ CL ⋅ f
La potenza dinamica dipende dalle capacità del circuito, dalla tensione di alimentazione e dalla frequenza
operativa: cresce linearmente con la frequenza e in modo quadratico con la tensione di alimentazione.
M. Poli e S. Rocchi – diapositiva 25
Potenza di cortocircuito
vi
vo
t
vOH
vOL
icc
icc1
t1
icc2
t2
t3 t4
t
Si definisce potenza di cortocircuito la potenza necessaria per far
commutare la tensione di uscita da vOL a vOH e viceversa attraverso
zone delle caratteristiche dei dispositivi corrispondenti a correnti
non nulle: spesso la commutazione dell’uscita passa attraverso zone
di funzionamento dei dispositivi in cui si crea un percorso diretto
(cortocircuito) tra l’alimentazione e massa, in tal caso
l’alimentazione eroga una corrente non nulla generando una
dissipazione di potenza. Dette icc1(t) e icc2(t) le correnti di
cortocircuito, rispettivamente per la transizione dell’uscita altobasso e basso-alto si definisce potenza di cortocircuito Pcc la
quantità
Pcc =
t
t4
VDD t 2
(
)
i
t
dt
+
icc1 (t )dt
cc
1
∫
∫
t3
T t1
Nell’ipotesi di comportamento simmetrico le correnti icc1(t) e icc2(t) hanno un andamento uguale e quindi
Pcc = 2
VDD
T
∫
t2
t1
icc1 (t )dt
In generale, nei comuni circuiti digitali, la potenza di cortocircuito è molto minore della potenza dinamica
Pcc << Pd
M. Poli e S. Rocchi – diapositiva 26
Circuiti ASIC
Un circuito integrato per applicazioni specifiche ASIC (Application Specific Integrated Circuit) è un circuito
integrato (IC) adattato alle esigenze di una particolare applicazione, piuttosto che progettato per un uso
generale. Ad esempio un chip progettato solamente per essere utilizzato in un telefono cellulare è un ASIC.
Un ASIC è progettato cercando di soddisfare prima di tutto le specifiche funzionali (il modo in cui dovrà
operare) e in secondo luogo cercando di ottimizzare simultaneamente vari vincoli di progetto (design
constraints). I seguenti sono vincoli di progetto comunemente tenuti in considerazione (ovviamente non sono
i soli):
► Vendibilità: un ASIC è progettato solo se esiste un mercato di vendita. Il
tipo di mercato determina la scelta della tipologia di progetto.
► Produttività: il prodotto deve essere producibile con un minimo scarto
(circuiti non funzionanti) e deve essere adatto a qualsiasi condizione
operativa prevista dal mercato di destinazione: consumer, militare, ecc.
► Tempo di ingresso sul mercato (time-to-market)
► Costo
► Flessibilità: la possibilità di cambiare le funzionalità del sistema senza
doverlo riprogettare completamente
► Prestazioni: densità di componenti integrati per IC, potenza dissipata,
velocità del sistema
M. Poli e S. Rocchi – diapositiva 27
Tempo di immissione sul mercato (time-to-market)
Guadagni
Previsione di guadagno
È il tempo necessario per portare un sistema ad uno sviluppo tale da
poter essere immesso sul mercato e quindi venduto (mediamente tale
tempo è fissato ad 8 mesi). La progettazione di un ASIC è preceduta da
un’analisi di mercato che fornisce la cosiddetta “finestra di mercato”
(market window), vale a dire il periodo durante il quale il sistema
Finestra di mercato
potrebbe avere le maggiori vendite: uno slittamento dei tempi di
Market window
immissione sul mercato potrebbe produrre un enorme perdita economica
da parte dell’industria che sta progettando il sistema. Si consideri il
modello triangolare semplificato dei guadagni in figura. In tale modello
Tempo in mesi
si suppone che il tempo di vita del prodotto (2V) sia in eguale misura
ripartito tra la fase di crescita e diminuzione delle vendite
Incasso massimo senza
Incasso massimo in
(entrambe di durata V) e i guadagni sono rappresentati
ritardo di immissione
caso di ritardo IMR
IM
dall’aria sottesa dal triangolo. In presenza di un ritardo R di
immissione dunque si avrebbe:
Guadagni senza ritardo = V ·IM
Guadagni con ritardo = (2V – R)·IMR /2
Fase di crescita
delle vendite
Nell’ulteriore ipotesi esemplificativa in cui il fattore di
crescita sia unitario si ha IM = V e IMR = V – R, per cui le
perdite percentuali P% risulterebbero pari a
P% = [V ·IM – (2V – R)·IMR /2] / (V ·IM) ·100% =
= R (3V – R) /(2V2)
(es. V = 12 mesi: R = 2 mesi → P% ≈ 24%; R = 4 mesi → P% ≈ 44%)
R
V
Immissione in tempo
Immissione in ritardo
Fase di
diminuzione
delle vendite
Tempo
2V
M. Poli e S. Rocchi – diapositiva 28
Costo
Il costo di mercato S di un prodotto (il prezzo di vendita) è dato da
S=
CTOT
(1 − m)N
dove CTOT è il costo totale sostenuto dall’industria per produrre quel prodotto, m è il margine di profitto
desiderato e N è il numero di pezzi prodotti. Il costo totale è a sua volta legato ai cosiddetti costi non
ricorrenti CNR (i costi di sviluppo e progettazione sostenuti prima dell’immissione sul mercato) e ai costi
ricorrenti CR (il costo necessario alla produzione di N unità) secondo la relazione
CTOT = C NR + C R = C NR + N ⋅ CU
con CU si è indicato il costo per unità, vale a dire il costo affrontato per la produzione di un singolo pezzo.
Come è facilmente intuibile tale costo è legato al processo tecnologico e quindi alla resa di processo, al tipo
di package usato, al test e al collaudo: ogni singolo chip viene testato e collaudato, e quindi, in fase di
progettazione, è necessario aggiungere dei sistemi che ne facilitano il test e collaudo come circuiti per il
Built-in Self Test (BIST), contatti aggiuntivi sul die, test patterns, ecc.
Contatti aggiuntivi sul die usati per il
test e collaudo. Le strisce nere in figura
sono le punte (molto piccole) di una
macchina per il collaudo appoggiate sui
contatti aggiuntivi.
M. Poli e S. Rocchi – diapositiva 29
Tecnologia
Il progetto di un ASIC è ovviamente fatto con strumenti software CAD che semplificano la progettazione e la
fase di test funzionale mediante strumenti di simulazione circuitale. Alla fine delle simulazioni software il
circuito che si trova in una fase descrittiva a livello di gate (gate-level) deve essere mappato in un circuito
integrato: il modo in cui questo avviene si chiama tecnologia. La tecnologia, in genere, differisce da industria
ad industria ma si possono individuare le seguenti tipologie principali
M. Poli e S. Rocchi – diapositiva 30
Full-custom
Il circuito è progettato in maniere completamente dedicata all’applicazione specifica: in tal caso i progettisti
si occupano della disposizione dei singoli componenti e delle interconnessioni fra essi ottimizzando area e
prestazioni dell’intero circuito integrato. Com’è facile intuire, tale approccio richiede un notevole impiego di
risorse umane e strumentali e un know-how adeguato dell’azienda produttrice. Inoltre i costi e i tempi di
progettazione risultano elevati e giustificati solo per produzioni relativamente grandi (più di 2000000 pezzi) o
per applicazioni particolari. Oggi vengono prodotti con tale tecnica principalmente microprocessori e
memorie da immettere nel mercato consumer.
Vantaggi:
► Elevate prestazioni: maggiore frequenza operativa, maggior numero di componenti integrati
per chip, minore potenza dissipata
► Minore costo per unità: questo è legato alla più alta scala di integrazione e quindi alla minore
area occupata dal chip (a parità di componenti).
► Minore ingombro
Svantaggi:
► Elevati costi non ricorrenti dato che il tempo di progettazione è solitamente molto più lungo e
sono necessari un più largo numero di prototipi rispetto ad altri approcci
► Elevati tempi time-to-market: prima che si arrivi ad una versione del circuito vendibile sul
mercato passano parecchi mesi
► È richiesta una elevata conoscenza specialistica delle tecniche di lavorazione del silicio
M. Poli e S. Rocchi – diapositiva 31
Semi-custom
L’approccio semi-custom fa uso di un numero molto elevato di blocchi funzionali elementari le cui
interconnessioni sono lasciate appositamente incomplete dal costruttore. Il progettista, avvalendosi di
strumenti CAD, definisce le interconnessioni in modo da comporre il circuito integrato adatto alle specifiche
esigenze.
Vantaggi (rispetto all’approccio full-custom):
► Costi non ricorrenti inferiori dato che il tempo di progettazione è solitamente più breve e sono
necessari un più basso numero di prototipi
► Minori tempi time-to-market: il progettista deve solo utilizzare dei blocchi funzionali già
realizzati e testati riducendo così i tempi di progettazione
► È richiesta una bassa conoscenza specialistica delle tecniche di lavorazione del silicio
Svantaggi (rispetto all’approccio full-custom):
► Minori prestazioni: minore frequenza operativa, minore numero di componenti integrati per
chip, maggiore potenza dissipata
► Maggiore costo per unità: l’area di silicio a disposizione non è interamente occupata, infatti
un blocco elementari occupa un’area di silicio sicuramente maggiore di quella effettivamente
richiesta dai componenti in esso contenuti
► Maggiore ingombro
M. Poli e S. Rocchi – diapositiva 32
Semi-custom: standard cells, gate array
►Standard cell (celle standard): Con l’approccio a standard cell, un
circuito integrato viene realizzato mediante il posizionamento e
l’interconnessione di blocchi di base, denominati appunto celle standard.
Con tale approccio la realizzazione di un circuito è effettuata usando
solamente dei blocchi funzionali (flip-flop, full-adder, ecc.) che si trovano
in una libreria software fornite dal costruttore. Ogni cella della libreria ha
quindi delle caratteristiche che non possono essere modificate dal
progettista che si occupa solamente del loro posizionamento e delle
interconnessioni (nemmeno quest’ultime sono totalmente libere dovendo il
progettista seguire determinate regole e percorsi).
►gate array (matrici di gate): la casa costruttrice fornisce via software dei
circuiti integrati formati da matrici di transistori o gate più complessi (ma
comunque tutti uguali) e il progettista stabilisce solamente le interconnessioni tra essi.
M. Poli e S. Rocchi – diapositiva 33
Programmabili
Con questo approccio il progettista acquista un circuito integrato già pronto all’uso. Il compito del progettista
è solo quello di stabilire, attraverso la programmazione del chip, quali interconnessioni attivare e quali
disattivare. La diversa procedura di programmazione (EPROM, E2PROM, SRAM, ecc.) e la tipologia di
tecnologia distingue diverse famiglie di dispositivi programmabili nelle principali tipologie: Complex
Programmable Logic Device (CPLD), Field Programmable Gate-Array (FPGA), Memorie.
Vantaggi (rispetto ai precedenti):
► Costi non ricorrenti bassi dato che la progettazione è molto più breve e non sono richiesti
prototipi (la maggior parte di tali dispositivi si possono programmare più volte)
► Bassi tempi time-to-market: il progettista deve solo utilizzare dei blocchi funzionali già
realizzati e testati riducendo così i tempi di progettazione
► Non è richiesta alcuna conoscenza specialistica delle tecniche di lavorazione del silicio
Svantaggi (rispetto ai precedenti):
► Basse prestazioni: minore frequenza operativa, numero di componenti integrati per chip
fissato, maggiore potenza dissipata
► Costo per unità approssimativamente1 fisso: il dispositivo programmabile ha un costo fisso a
prescindere dal numero di pezzi prodotti (questo rende i dispositivi programmabili adatti a
piccoli numeri di pezzi)
► Alto ingombro
1
Molte ditte fanno prezzi di vendita diversi a seconda del numero di chip acquistati.
M. Poli e S. Rocchi – diapositiva 34
Field Programmable Gate-Array (FPGA)
Un Field Programmable Gate-Array (FPGA) è un chip che contiene blocchi logici e interconnessioni
programmabili. I blocchi di logica programmabile (logic blocks) possono essere configurati per agire da
blocchi logici di base (AND, OR, XOR, NOT, flip-flop, multiplexer) oppure da funzioni combinatorie più
complesse, ad esempio decoder o funzioni matematiche elementari. I blocchi di logica programmabile
conservano la programmazione in elementi di memoria come flip-flop oppure, nei modelli più complessi, in
memorie statiche (SRAM): interconnessioni gerarchiche tra blocchi logici consentono al progettista di
effettuare qualunque funzione logica richiesta.
{
matrici di
interruttori
interconnessioni
A
logic
cell
logic
cell
B
interruttori
controllati da
SRAM
{
logic
cell
logic
cell
cella
SRAM
SRAM
A
B
M. Poli e S. Rocchi – diapositiva 35
Tabella sinottica ASICs
Unità prodotte
CNR
CR
TM
Prestazioni
Full-custom
>2.000.000
Alto
Basso
Alto
Elevate
Semi-custom
Standard cell
Da 200.000
a 2.000.000
↓
↑
↓
↓
Semi-custom
Gate array
Da 20.000
a 200.000
↓
↑
↓
↓
Programmabili
<20.000
↓
↑
↓
↓
Basso
Alto
Basso
Minori