CORPO RIGIDO
ESERCIZIO 1
˜ di raggio
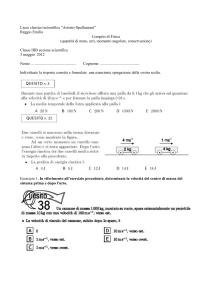
Un profilo rigido è costituito da un tratto rettilineo AB e da una semicirconferenza BC
= 20 cm come in figura. Dal punto A viene lanciata una moneta, di raggio r = 2 cm, che rotola
senza strisciare lungo il profilo. Calcolare qual è il valore minimo della velocità iniziale v A della
moneta che le permette di giungere nel punto più alto C (suggerimento: mostrare che il modulo
della reazione vincolare decresce all’aumentare altezza dal suolo).
ESERCIZIO 2
Un cilindro omogeneo di massa M e raggio r è vincolato a ruotare senza attrito attorno al suo asse.
Una corda inestensibile di massa trascurabile è avvolta attorno al cilindro e al suo estremo libero
sono appesi due corpi di ugual massa m uniti da una fune. Si lasciano i due corpi liberi di cadere.
Calcolare: a) il modulo dell’accelerazione angolare del cilindro; b) la tensione della fune che lega
le due masse.
ESERCIZIO 3
Una sbarra lineare omogenea di massa M e lunghezza posta verticalmente è vincolata a ruotare
attorno a un asse orizzontale passante per il centro. Un proiettile di massa m p = M/3 si muove
orizzontalmente a velocità costante v con direzione perpendicolare all’asse di rotazione. Dopo
aver colpito la sbarra all’estremo inferiore, il proiettile rimane agganciato ad essa. a) Calcolare la
velocità angolare con cui si mette in rotazione il sistema in assenza di attrito statico. b) Dimostrare
che l’urto è anelastico e calcolare l’energia cinetica dissipata durante l’urto. Subito dopo l’urto
viene esercitato dell’attrito sul giunto, frenando il sistema e portandolo a fermarsi dopo aver compiuto 3.5 giri. c) Calcolare il lavoro compiuto dalla forza di attrito e d) determinare quali valori
1
del modulo della velocità v del proiettile rendono possibile questa configurazione (suggerimento:
considerare le caratteristiche del lavoro della forza d’attrito). Infine, e) calcolare il momento assiale della forza d’attrito rispetto all’asse di rotazione, nell’ipotesi che esso sia costante.
ESERCIZIO 4
Un sistema è composto da una sbarra omogenea di lunghezza l = 1 m, massa m s = 1 kg e sezione
traversa trascurabile e un disco omogeneo di raggio r = 0.2 m, massa m d = 1 kg incollato al centro
ad una estremità della sbarra. Il sistema può ruotare senza attrito in un piano verticale attorno a
un asse fisso passante per l’altro estremo della sbarra. Il sistema inizialmente tenuto fermo orizzontalmente viene lasciato libero. Determinare: a) l’accelerazione angolare del sistema quando la
sbarra ha effettuato una rotazione di 60◦ ; b) il momento angolare del sistema quando la sbarra ha
effettuato una rotazione di 60◦ ; c) in quale posizione si ha la velocità angolare massima e il suo
valore; d) la velocità angolare quando il sistema ha effettuato una rotazione di 180 ◦ .
ESERCIZIO 5
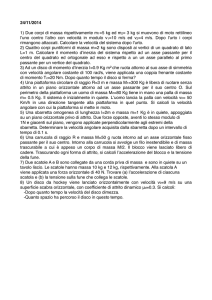
Due punti materiali di ugual massa m = 0.5 kg sono fissati agli estremi di un’asta rigida di
lunghezza l = 50 cm e massa trascurabile collocata su un piano orizzontale (indicato in figura
2
con xy) privo di attrito. L’asta è soggetta a un vincolo ideale nel punto O, distante d = 20 cm da
un’estremità, che le consente di ruotare solo attorno all’asse perpendicolare al piano e passante per
O. Il punto materiale fissato all’estremo più prossimo ad O subisce un urto elastico da parte di un
proiettile di massa m0 = 2m: prima dell’urto il proiettile si muove con velocità v = 2 m/s diretta
ortogonalmente verso l’asta e dopo l’urto esso rimbalza in direzione opposta. Calcolare: a) il momento d’inerzia del sistema composto dall’asta e dalle due masse rispetto all’asse di rotazione; b)
la velocità del proiettile dopo l’urto; c) la velocità angolare dell’asta dopo l’urto.
ESERCIZIO 6
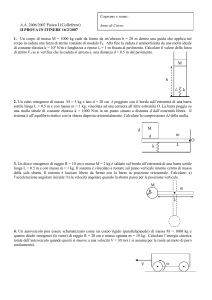
Un sistema è formato da un disco di raggio r e massa M D = M sulla cui superficie è incollata una
sbarra di lunghezza r e massa MS = MD /3. Attorno al disco è arrotolata una corda inestensibile
di massa trascurabile al cui estremo è appesa una massa puntiforme M 3 . Il disco è fissato ad un
piano verticale mediante un chiodo passante per il suo centro ed è libero di ruotare attorno ad
esso. Nell’ipotesi che il sistema sia in condizioni statiche con la sbarra in posizione orizzontale
(vedi figura) determinare: a) la massa M3 , b) il momento d’inerzia del sistema composto da disco
e sbarra rispetto all’asse di rotazione. c) Ad un certo istante la corda viene tagliata: determinare
l’accelerazione angolare del disco. Risolvere per r = 1 m, M = 6 kg.
3
SOLUZIONI
Una precisazione sulla notazione di questi esercizi. Per coerenza con le figure, si indica il peso
con P, il lavoro con L (grandezza scalare), il momento angolare con L (grandezza vettoriale) e
l’energia cinetica con K. Si tenga presente che la notazione del libro è diversa per il peso, indi , e per il momento angolare, indicato con P.
cato con W
ESERCIZIO 1
Le forze che agiscono sulla moneta sono la forza peso P, la reazione vincolare R e l’attrito statico
Fs , necessario affinché il corpo rotoli senza strisciare. Tuttavia, le ultime due forze non compiono
lavoro: infatti R è sempre perpendicolare allo spostamento, mentre Fs ha associato uno spostamento elementare nullo in ogni punto (ds = 0, non c’è strisciamento). Poiché il peso è una forza
conservativa, avremo che l’energia meccanica (EM = K +U ) della moneta si conserva lungo tutto
il percorso. Cerchiamo un’espressione generale per descriverla. Per quanto riguarda l’energia cinetica K, essa sarà composta da un termine traslazionale e da uno rotazionale (teorema di König
per l’energia cinetica):
1 2
1
+ Iω2
K = Ktr + Krot = mvCM
2
2
dove il momento d’inerzia della moneta è pari a quello di un disco rispetto un asse ad esso per2
pendicolare, passante per il suo CM (I = mr2 ); essendo il moto di rotolamento senza strisciamento, la velocità angolare di rotazione attorno al centro di massa (CM) può essere espressa come
ω = vCM /r. Avremo quindi che:
4
1 2
1 mr2 Å vCM ã2 1 2
1 2
3 2
K = mvCM +
= mvCM + mvCM
= mvCM
.
2
2 2
r
2
4
4
Per l’energia potenziale U , fissando come suo punto di zero (U = 0) la quota che corrisponde al
profilo nel tratto AB, avremo:
U = mgy
dove y indica l’altezza del centro di massa dal suolo (vedere SdR segnato in figura). In generale
l’energia meccanica sarà quindi data da:
3 2
EM = mvCM
+ mgy
4
()
espressa in funzione della velocità e della quota del CM della moneta.
Affinchè la moneta arrivi in C, occorre che rimanga sempre aderente al profilo, occorre cioè avere
una reazione vincolare non nulla (di modulo R > 0) per tutto il tratto. Seguendo il suggerimento del
testo, dimostriamo che R raggiunge il valore minimo nel punto di massima altezza. Nel tratto AB si
˜ avremo un moto circolare del CM. Applichiamo
ha che R è costante ed opposta a P. Nel tratto BC
la prima equazione cardinale (oppure il secondo teorema del CM) per cui maCM = F EST , per
cui cioè il moto del CM della moneta è il moto di un punto sottoposto al risultante delle forze
esterne. Questo risultante comprende un componente centripeto, se il moto del CM è circolare, il
cui modulo vale:
mv2
Fc = CM
(•)
−r
dove si è considerato che il raggio della traiettoria del CM è pari a − r. Questa forza sarà il
risultante delle componenti normali alla traiettoria delle tre forze in gioco: l’attrito Fs , sempre
diretto tangenzialmente, quindi con componente normale alla traiettoria nulla; R, sempre diretta
verso il centro della traiettoria; il peso P che ha componente normale dipendente dalla posizione.
In sintesi avremo:
Fc = R + Pn = R − mg cos θ
(♦)
ove θ è indicato in figura. Quindi eguagliando la (•) e la (♦) ricaviamo R:
v2
R = m CM + g cos θ
−r
(◦)
dove vCM e θ sono termini variabili. All’aumentare dell’altezza della moneta entrambi gli addendi
dentro parentesi diminuiscono. Infatti dalla () si ha che all’aumentare di y deve corrispondere
2 (conservazione dell’energia meccanica), mentre cos θ passa da +1 a −1
una diminuzione di vCM
all’aumentare di θ. Quindi R diminuisce continuamente all’aumentare della quota, e affinchè la
5
moneta rimanga sempre aderente al profilo fino a raggiungere il punto C sarà sufficiente porre la
condizione R > 0 in C. Imponendo R > 0 nella (◦) nel punto C (ove θ = π ⇒ cos θ = −1), avremo:
vC2 > g( − r)
ove vC è la velocità del CM in C. Serve ora una relazione fra vC e la velocità del CM in A (vA ).
Imponendo la conservazione dell’energia meccanica fra A e C, ed usando l’equazione (), abbiamo:
A
C
EM
= EM
⇒
3 2
3
8
mvA + mgr = mvC2 + mg(2 − r) ⇒ vC2 = v2A − g( − r).
4
4
3
Sostituendo questa espressione per vC nella condizione vC2 > g( − r) ottenuta sopra, abbiamo la
condizione su vA richiesta dal testo:
v2A −
8
g( − r) > g( − r) ⇒ vA >
3
11
g( − r) 2.54 m/s.
3
ESERCIZIO 2
In figura sono mostrate le forze che agiscono sui diversi corpi. Essendo il cilindro un corpo rigido
P e R vanno considerate come applicate al suo centro di massa. Fissiamo un SdR con asse x coincidente con l’asse del cilindro e y passante per il suo centro di massa.
ext = L˙ che lega il moa) Per trovare l’accelerazione angolare utilizzo la II equazione cardinale M
mento delle forze esterne alla derivata del momento angolare totale che comprende sia il momento
della quantità di moto dovuto alla traslazione sia il momento angolare dovuto a rotazione. Le forze
agenti sul sistema sono il peso P, la reazione vincolare R e i pesi delle masse P1 e P2 . Le tensioni
6
possono essere considerate forze interne. Scelgo come centro di riduzione per il calcolo dei momenti il centro di massa del cilindro. In questo modo sia il peso P che la reazione vincolare R del
cilindro hanno braccio nullo. Le uniche forze che contribuiscono al momento sono quindi i pesi
degli oggetti 1 e 2:
ext =rR × R +rc × Pc +r1 × P1 +r2 × P2 =
M
= 0 × R + 0 × P + (rk̂) × (−mg ĵ) + (rk̂) × (−mg ĵ) = 2mgr î
Il momento angolare totale è dato da due contributi: il momento della quantità di moto Ltrasl =
r × 2mv, dato dalle due masse 1 e 2 con velocità v e braccio r, e il momento angolare del cilindro
Lrot = Iω, con momento d’inerzia I = Mr2 e che ruota con velocità angolare ω. Velocità angolare
2
del cilindro e velocità di discesa delle masse sono legate dalla relazione del moto circolare v = ωr,
quindi il momento angolare totale diventa:
2
2
L = Lrot +Ltrasl = Iω +r × 2mv = Mr ω + (rk̂) × (−2mωr j)
ˆ = Mr ωî + 2mr2 ωî
2
2
Unendo le due espressioni del momento delle forze esterne e del momento angolare totale nella II
equazione cardinale e proiettandola lungo l’asse x si ottiene:
d
2mgr =
dt
Mr2
ω + 2mr2 ω
2
⇒ 2mgr =
4mg = (M + 4m)rω̇ ⇒ ω̇ =
Mr2
ω̇ + 2mr2 ω̇ ⇒
2
4mg
(M + 4m)r
b) Per trovare la tensione T2 che lega i due corpi si scrive l’equazione della dinamica sui due corpi
separatamente e poi la si proietta lungo l’asse verticale. L’accelerazione delle masse è legata alla
velocità angolare di rotazione del cilindro: a = ω̇r. Quindi si ha:
1) T1 + T2 + P1 = ma
⇒
2) T2 + P2 = ma
®
T1 − T2 − P1 = −mω̇r
T2 − P2 = −mω̇r
⇒ T2 − mg = −mω̇r
Sostituendo il valore trovato di ω̇ si ottiene il risultato
T2 = mg − mr
4mg
Mm
=
g
(M + 4m)r (M + 4m)
7
ESERCIZIO 3
In figura sono mostrate le forze che agiscono sul sistema: P e R (uguali ed opposte prima dell’urto)
che agiscono sul giunto della sbarra, e Pp che agisce sulla pallina. Ad esse, dopo l’urto, si aggiunge
l’attrito sul giunto. La sbarra è vincolata a ruotare attorno all’asse z.
a) Occorre notare che durante l’urto col proiettile la reazione vincolare R varia per compensare
l’impatto della pallina. In questo caso, quindi, R è una forza esterna impulsiva: essa dà luogo a
non si conserva. Però, se fissiamo come
un impulso non nullo, quindi la quantità di moto totale Q
centro di riduzione il punto O, R ha braccio nullo quindi è nullo anche il suo momento. Sono inoltre
nulli anche il momento di P e di Pp rispetto ad O, quest’ultimo perchè il vettore di applicazione è
parallelo alla forza stessa. Questo fa sı̀ che si conservi il momento angolare rispetto a O. Infatti,
calcolando il momento totale delle forze esterne otteniamo
ext =rO × P +rO × R +r p × Pp = 0
M
˙ avremo
ext = L,
Ricordando la II equazione cardinale M
ext = L˙ = 0 ⇒ L = cost
M
quindi il momento angolare totale L calcolato rispetto al punto O si conserva. Posso quindi imporre
la conservazione del momento angolare prima e dopo l’urto Li = L f , dove prima dell’urto si ha
solo il momento della quantità di moto del proiettile, mentre dopo l’urto si ha il momento angolare
dell’asta che ruota, col proiettile attaccato. Calcoliamo i due momenti separatamente, sempre
considerando O come centro di riduzione
Ç
å Ç
å
M
Li =r p × (m pv) = − jˆ × − v î = − Mv k̂
2
3
6
8
2
L f = Itotω = (Is + I p )ω = M + M
12
3
Ç å2 2
ω =
M2
ω
6
dove, con riferimento alla figura, k̂ è orientato nel verso uscente dal piano del foglio, e dove si è
tenuto conto che il momento d’inerzia totale (calcolato rispetto all’asse z) Itot = M2 /6 dopo l’urto
è la somma di quello della sbarra, Is , e quello del proiettile, I p. Eguagliando i due termini si ottiene
la velocità angolare
Ç
å
6
Mv
v
ω =
k̂ = − k̂
−
2
M
6
Il vettore ω è quindi diretto con il verso entrante, il che corrisponde a una rotazione in senso orario.
b) Un urto è anelastico se e solo se si ha una diminuzione dell’energia cinetica totale del sistema.
La variazione di energia cinetica associata all’urto corrisponde a ∆K = K f −Ki , cioè alla differenza
tra l’energia cinetica finale e iniziale. Calcoliamo i due termini
1
1M 2 1 2
v = Mv
Ki = m p v2 =
2
23
6
2 Å v ã2
1
1
1
M
K f = Itot ω2 =
= Mv2
2
2
6
12
Si ha quindi che ∆K = K f − Ki = −1/12 Mv2 , con il segno “–” che indica una dissipazione di
energia cinetica.
c) Essendo in presenza di attrito non vale la conservazione dell’energia meccanica. Si può usare il
teorema delle forze vive, Ltot = ∆K, che lega il lavoro totale compiuto dalle forze alla differenza
di energia cinetica. Nel caso in questione l’energia cinetica finale è nulla, poiché il sistema si
ferma, mentre quella di partenza è l’energia cinetica dopo l’urto, K f , che abbiamo già calcolato al
punto precedente, quindi ∆K = 0 − K f = −1/12 Mv2 . Trascurando la reazione vincolare che non
compie lavoro, le forze in gioco sul sistema sono la forza peso e la forza frenante. La forza peso è
conservativa quindi il lavoro compiuto sul sistema può essere calcolato dalla variazione di energia
potenziale. Il centro di massa della sbarra non si muove, quindi la sua energia potenziale gravitazionale sarà invariata (∆Us = 0). Al contrario, considerando il proiettile, se il sistema compie
3.5 giri si troverà capovolto rispetto alla posizione iniziale quindi, col proiettile in alto si avrà un
aumento dell’energia potenziale gravitazionale. Avremo quindi
∆U = U f −Ui = ∆Us + ∆U p = 0 + m p g∆y p =
e quindi
LP = −∆U = −
9
Mg
3
Mg
3
Inserendo i termini nell’equazione del teorema delle forze vive e chiamando L a il lavoro della forza
d’attrito si ottiene
Ltot
Mg
1
Mg
M
v2
1
= LP + La = ∆K ⇒ −
g −
+ La = − Mv2 ⇒ La =
− Mv2 =
3
12
3
12
3
4
d) Il lavoro compiuto dalla forza d’attrito è sempre negativo, o nullo nel caso limite. Ciò rende
possibile questa configurazione solo per alcuni valori della velocità v:
M
v2
La ≤ 0 ⇒
g −
3
4
≤ 0 ⇒ g −
»
v2
≤ 0 ⇒ v ≥ 4g
4
Il
√ sistema può raggiungere questa configurazione solo se la velocità del proiettile è maggiore di
4g. Per valori inferiori l’energia cinetica del sistema non è sufficiente a far compiere 0.5 giri al
sistema, per portare il proiettile nel punto più alto.
e) La forza d’attrito agisce sul giunto e avrà quindi braccio molto piccolo. Non essendo nota la
dimensione di questo giunto, e nemmeno il modulo della forza d’attrito, non è possibile calcolare
il suo momento assiale m a,z con la formula della definizione, ma,z = (ra × Fa ) · k̂. È invece noto
il tratto angolare su cui l’attrito agisce: ∆θ = 3.5 giri = 7π rad. Abbiamo inoltre calcolato il
lavoro La svolto dall’attrito nel punto precedente. Possiamo quindi utilizzare la relazione che lega
il momento assiale di una forza al lavoro in un moto rotatorio (cfr. formula 8-17 del libro di testo):
La = ma,z ∆θ
ed ottenere ma,z grazie al fatto che è costante. Avremo quindi
La
v2
M
ma,z =
g −
=
∆θ 21π
4
10
ESERCIZIO 4
In figura sono segnate le forze agenti sul sistema che sono il peso della sbarra, Ps , e quello del disco
Pd : i due pesi si considerano applicati al centro di massa dei rispettivi corpi. L’asse z è orientato
con verso uscente al piano del foglio (î, jˆ e k̂ sono una terna ortonormale destra).
˙ Es ext = L.
a) Per trovare l’accelerazione angolare si deve utilizzare la II equazione cardinale, M
sendoci solo un moto rotatorio attorno all’asse z, il momento angolare è dato da L = Itotω, dove Itot
˙ , da cui
è il momento d’inerzia del sistema rispetto all’asse di rotazione. Quindi avremo L˙ = Itotω
˙ . In questo caso il momento d’inerzia si trova sommando il momento d’inerzia
possiamo ricavare ω
della sbarra e quello del disco, Itot = Is + Id , entrambi calcolati rispetto all’asse di rotazione: abbiamo quindi due momenti d’inerzia calcolati per un asse non passante per il centro di massa di
nessuno dei due oggetti. Per calcolarli usiamo il teorema di Huygens-Steiner:
Itot
Ç å2 ms l 2
l
+ ms
= Is + Id =
12
2
md r 2
+ md l 2 =
+
2
ms l 2 md r 2
2ms l 2 + 3md r2 + 6md l 2
+
+ md l 2 =
3
2
6
Calcoliamo ora il momento delle forze usando come centro di riduzione l’origine del SdR:
ext =rs × Ps +rd × Pd
M
=
dove rs e rd indicano i vettori posizione dei centri
separatamente le espressioni per i vari termini
rs = 2l cos α î − 2l sin α jˆ
Ps = −ms g jˆ
11
di massa della sbarra e del disco. Scriviamo
rd = l cos α î − l sin α jˆ
Pd = −md g ĵ
Svolgendo i calcoli si ottiene
Å
ã
ext = −lg cos α ms + md k̂
M
2
Possiamo ora calcolare l’accelerazione angolare:
ext
˙ ⇒ ω
˙ = M = − 3lg cos α(ms + 2md ) k̂
ext = L˙ = Itotω
M
Itot
2ms l 2 + 3md r2 + 6md l 2
da cui si deduce che, con riferimento alla figura, l’accelerazione angolare è diretta lungo l’asse z
in direzione entrante, il che corrisponde al senso orario. Svolgendo il calcolo otteniamo:
˙ −5.43 k̂ rad/s2
ω
b) Avendo a che fare con un moto puramente rotatorio il momento angolare è dato da L = Itotω.
Avendo già calcolato il momento d’inerzia Itot del sistema, per calcolare il momento angolare è
sufficiente calcolare il valore della velocità angolare ω del sistema. Non essendoci forze dissipative l’energia meccanica si conserva. Per trovare ω impongo quindi la conservazione dell’energia
meccanica totale tra il punto iniziale in cui il sistema è in quiete orizzontalmente e il punto in cui
il sistema ha compiuto una rotazione di angolo α
f
i
f
Emecc
= Emecc
⇒ K i +Usi +Udi = K f +Usf +Ud
dove abbiamo indicato con K l’energia cinetica del sistema (che in questo caso sarà di tipo rotatorio) e con Us e Ud le energie potenziali gravitazionali del disco e della sbarra. Il sistema è
inizialmente in quiete, quindi K i = 0. Possiamo fissare la quota di riferimento per il calcolo di U
coincidente con l’asse x, quindi avremo anche che Usi = Udi = 0, perché entrambi i centri di massa
i
= 0. Nel punto finale avremo
dei due oggetti giacciono sull’asse x all’inizio: questo fa sı̀ che E mecc
f
f
f
invece K positiva e Us e Ud negative:
1
l
0 = Itot ω2 − ms g sin α − md gl sin α ⇒
2
2
Å
ã
ms
(ms + 2md )gl sin α
2
+ md gl sin α ∗
ω2 =
⇒ ω=−
2
Itot
Itot
dove, con riferimento alla figura, k̂ è orientato nel verso uscente dal piano del foglio, e dove si è
scelto il segno “–” per indicare una velocità angolare negativa, coerentemente col SdR considerato.
Il momento angolare sarà quindi
»
L = Itotω = − (ms + 2md )Itot gl sin α k̂ =
12
Ã
Ç
å
ms l 2 md r 2
= − (ms + 2md )
+
+ md l 2 gl sin α k̂ −5.87 k̂ kg m2 /s
3
2
c) Nel punto precedente abbiamo ottenuto il valore della velocità angolare in funzione delle altre
variabili. Il suo modulo è pari a
|ω| =
(ms + 2md )gl sin α
Itot
()
L’unica variabile è l’angolo α, mentre gli altri fattori sono tutte costanti positive. Il valore massimo
del modulo della velocità si avrà quindi per sin α = 1 ⇒ α = 90 ◦ , cioè con l’asta in posizione
verticale. Il suo valore sarà quindi
ω=−
6(ms + 2md )gl
−4.66 rad/s
2ms l 2 + 3md r2 + 6md l 2
d) Sostituendo il valore α = 180◦ nella () si ottiene il risultato di |ω| = 0, poiché sin α = 0. Alternativamente, si può giungere allo stesso risultato da considerazioni sull’energia. Infatti, avendo
visto al punto b) che E mecc = 0, per la conservazione dell’energia meccanica avremo che quando
il sistema raggiunge la configurazione di α = 180 ◦ si ha
E mecc = K +Us +Ud = 0
Poichè per α = 180◦ la sbarra e il disco si trovano col centro di massa alla quota y = 0, si ha che
Us = Ud = 0, quindi
1
K = Itot ω2 = 0 ⇒ ω = 0
2
ESERCIZIO 5
a) Essendo la massa dell’asta trascurabile, per calcolare il momento d’inerzia rispetto all’asse di
rotazione si devono sommare due contributi, uno per ognuna delle masse situate alle estremità:
I = m(l − d)2 + md 2 = m(l 2 − 2ld + 2d 2 ) = 0.065 kg m2
b+c) È importante notare come la reazione vincolare esercitata dal giunto al momento dell’urto sia
una forza impulsiva (agisce con intensità molto elevata per un breve intervallo di tempo) esterna al
sistema. Per cui il sistema non è isolato e la quantità di moto non si conserva (impulso non nullo).
Tuttavia, scegliendo come polo di riduzione il punto O, i momenti delle forze esterne si annullano,
13
ext = 0 ⇒ L = cost.
quindi per la II equazione cardinale si conserva il momento angolare: L˙ = M
Inoltre, essendo l’urto di tipo elastico ed in assenza di forze dissipative, si conserva l’energia
meccanica totale: in particolare, essendo il sistema su un piano orizzontale (nessuna variazione di
energia potenziale gravitazionale) si conserva l’energia cinetica. Mettendo queste due condizioni
a sistema si ottengono due equazioni nelle due incognite che sono la velocità del proiettile v f dopo
l’urto e la velocità angolare ω dell’asta dopo l’urto. Indicando con i e f gli istanti precedente e
successivo all’urto, avremo un sistema di due equazioni che dipenderà dalle sole due incognite del
problema:
L) Li = L f
(♦)
K) K i = K f
Calcoliamo i vari termini separatamente. Il momento angolare iniziale totale sarà pari a:
Li = Lip +Lis =r p × m0v + 0 = −d jˆ × m0 v î = m0 dv k̂
dove si è tenuto conto che Lis = 0, perché la sbarra è inizialmente ferma (con riferimento alla figura,
k̂ è perpendicolare al piano del foglio, con verso uscente). Il momento angolare totale dopo l’urto
è
L f = L pf +Lsf =r p × m0v f + Iω = −d jˆ × (−m0 v f î) + Iω k̂ = (Iω − m0 dv f ) k̂
f
dove si è tenuto conto che Ls è diretto lungo z perché la sbarra è vincolata a ruotare nel piano xy e
chev f è diretta lungo x con verso negativo (v f è quindi un valore positivo). I due termini di energia
cinetica sono:
f
K i = K pi + Ksi = 12 m0 v2 + 0 = 12 m0 v2
f
K f = K p + Ks = 12 m0 v2f + 12 Iω2
Inserendo i termini nel sistema (♦) e proiettando la L) lungo z otteniamo
L) m0 dv = Iω − m0 dv f
K) 12 m0 v2 = 12 m0 v2f + 12 Iω2
L) v f =
−v
2
⇒
−
v
+ Iω2
K) m0 v2 = m0 mIω
0d
Iω
m0 d
Considerando la K) otteniamo un’equazione di secondo grado in ω
I 2ω2 2Ivω
K) m0 v =
+ m0 v2 + Iω2 ⇒
−
m0 d 2
d
2
Ç
å
I
2Iv
ω=0
1+
Iω2 −
2
m0 d
d
che ha due soluzioni: quella ovvia, ω = 0, che corrisponde alla configurazione prima dell’urto e
quella che cerchiamo
ω=
4dv
2v(m0 d 2 )
= 2
7.62 rad/s
2
d(I + m0 d ) l − 2ld + 4d 2
14
Inserendo il valore di ω nella K) e sostituendo i valori di m 0 = 2m e del momento d’inerzia I, si
ottiene
2(l 2 − 2ld + 2d 2 )
m(l 2 − 2ld + 2d 2 )(4d)v
l(l − 2d)v
−
v
=
−
1
v
=
0.48 m/s
K) v f =
2md(l 2 − 2ld + 4d 2 )
l 2 − 2ld + 4d 2
l 2 − 2ld + 4d 2
che è il risultato cercato.
ESERCIZIO 6
In figura sono segnate tutte le forze agenti sui vari oggetti del sistema, con R che indica la reazione
vincolare esercitata dal chiodo sul disco. Consideriamo un SdR cartesiano con x orizzontale, y
verticale e origine nel centro del disco.
a) Per trovare la massa M3 occorrono entrambe le equazioni della statica: infatti, non solo deve
annullarsi il risultante delle forze, ma poiché le forze hanno punti di applicazione diversi deve
essere nullo anche il momento totale. Utilizzando la I equazione della statica applicata a M 3
otteniamo
I) P3 + T = 0 ⇒ |T | = M3 g
Conoscendo il modulo della tensione, possiamo scrivere la II equazione della statica per il sistema
composto da disco e sbarra. Scegliamo il centro del disco come polo per il calcolo dei momenti
delle forze (in questo modo Pd e R hanno braccio nullo) ed imponiamo che il momento risultante
sia nullo:
Ç
å
r
M
II)rT × T +0 × Pd +0 × R +rs × Ps = 0 ⇒ (−r î) × (−M3 g ĵ) + î × − g jˆ = 0
2
3
15
1
M
⇒ M3 gr k̂ − Mgr k̂ = 0 ⇒ M3 =
= 1 kg
6
6
Si noti come questo risultato non dipenda dalle dimensioni del sistema, cioè dal valore di r.
b) Il momento d’inerzia Itot del sistema composto da disco e sbarra è dato dalla somma dei momenti
d’inerzia dei due elementi:
Ç
Itot
å
Å ã2
1
1
r
1
Md r 2 Ms r 2
11 2
+
+ Ms
+ +
Mr 3.67 kg m2
= Id + Is =
=
Mr2 =
2
12
2
2 36 12
18
dove per il calcolo di Is si è utilizzato il teorema di Huygens-Steiner.
c) Quando la corda viene tagliata il momento delle forze agenti sul sistema (composto da disco e
sbarra) non è più nullo come in precedenza, poiché sparisce il termine associato alla corda tesa,
rT × T : il sistema si mette quindi a ruotare. Per trovare l’accelerazione angolare α del disco
utilizziamo la II equazione cardinale della dinamica:
ext = L˙ = Itotα
M
dove i momenti sono calcolati rispetto al centro del disco. In questo caso il momento delle forze
esterne sarà dato dal solo contributo del peso della sbarra:
ext =rs × Ps = − Mrg k̂
M
6
Avendo già calcolato Itot , possiamo ricavare l’accelerazione angolare α:
ext
ext = Itotα ⇒ α = M = − Mrg ∗ 18 k̂ = − 3g k̂ −2.67 k̂ rad/s2
M
Itot
6
11Mr2
11r
Con riferimento alla figura, l’accelerazione angolare ha verso entrante, che corrisponde al senso
orario. Il suo valore non dipende dal valore delle masse del disco e della sbarra, ma unicamente
dal loro rapporto.
16