Appunti di
Geometria 1
Universitesto
D.L. Ferrario
© D.L. Ferrario, -
Appunti del corso di Geometria I (A.A. 2013/2014)
D.L. Ferrario
Dipartimento di Matematica e Applicazioni
Università di Milano-Bicocca
[Versione preliminare del 2014-05-30]
PREMESSA
Queste sono le note per il corso di Geometria I (primo anno del CdL
in Matematica), tenuto nel secondo semestre dell’A.A. 2013/2014 presso
il Dipartimento di Matematica e Applicazioni dell’Università di MilanoBicocca. Gli argomenti presentati a lezione sono riassunti in modo molto
schematico (e approssimativo nonché non esente da errori di varia natura* );
approssimativamente ogni settimana viene presentato un elenco di esercizi
assegnati (facoltativi ma fortemente consigliati). Tra questi ce ne saranno
alcuni da risolvere in gruppi di studio e da consegnare per ottenere un
bonus di punti all’esame. La parte teorica di queste note non può essere
considerata un testo su cui studiare, ma solo un compendio abbastanza dettagliato degli argomenti affrontati. Lo studio deve essere necessariamente
svolto sui libri consigliati (o sui numerosi volumi presenti in letteratura
e in biblioteca dedicati a questi argomenti) e sui propri appunti, possibilmente confrontando quanto si legge con quanto presentato in queste note.
Gli esercizi proposti settimanalmente possono essere semplici, di media
difficoltà, oppure presentare difficoltà significative (questi esercizi sono
segnalati in genere con uno o più asterischi). A volte l’asterisco segnala
semplicemente l’importanza dell’argomento affrontato nell’esercizio. Nel
tempo le note sono state e saranno modificate, corrette e integrate, per
cui si consiglia verso la fine del corso di ristampare o di controllare la
nuova versione.
Milano, 2014-05-30
D.L. Ferrario
*A
proposito di errori: la segnalazione di errori (a lezione, ricevimento, esercitazione o tutoraggio) è ben accetta. Sia di quelli che potrebbero essere stati inseriti
involontariamente che quelli volontari.
i
ii
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
INDICE
1 Richiami, aperti di spazi metrici
§ 1 Richiami . . . . . . . . . . . . . . . . . . . . . . . . .
§ 1.1 Richiami di logica matematica . . . . . . . . .
§ 1.2 Richiami di teoria degli insiemi . . . . . . . .
§ 2 Spazi metrici e continuità: topologia degli spazi metrici
§ 2.1 Proprietà dei sottoinsiemi aperti . . . . . . . .
Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
1
3
5
7
10
2 Chiusi e topologie
§ 3 Sottoinsiemi chiusi di uno spazio metrico . . . . . . . . . . . . . . . . .
§ 4 Spazi topologici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
§ 4.1 Base di una topologia . . . . . . . . . . . . . . . . . . . . . . . .
§ 4.2 Topologia indotta (topologia dei sottospazi, sottospazi topologici)
§ 4.3 Opzionale: Contare le topologie finite . . . . . . . . . . . . . . .
Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
13
13
18
19
20
20
22
3 Omeomorfismi, topologia prodotto e topologia quoziente
§ 5 Funzioni continue . . . . . . . . . . . . . . . . . . . .
§ 6 Topologia prodotto . . . . . . . . . . . . . . . . . . .
§ 7 Spazi di identificazione e topologie quoziente . . . . .
Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
25
25
30
31
38
4 Compattezza
§ 8 Compattezza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
§ 8.1 Spazi di funzioni e convergenza puntuale (opzionale) . . . . . . . . . . . . . . . . . .
Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
41
48
52
5 Compattezza negli spazi euclidei
§ 9 Compattezza in spazi metrici ed euclidei . . .
§ 10 Spazi metrici completi . . . . . . . . . . . .
§ 10.1 Opzionale: costruzione di R (Cantor)
Esercizi . . . . . . . . . . . . . . . . . . . . . . .
57
57
64
67
69
iii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
iv
INDICE
6 Connessione
§ 11 Spazi connessi . . . . . . . . . . . . . . . . . . .
§ 11.1 Spazi connessi per archi . . . . . . . . .
§ 11.2 Opzionale: construzione di R (Dedekind)
Esercizi . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
73
73
81
85
87
7 Gruppi di trasformazioni
93
§ 12 Gruppi di matrici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
§ 13 Gruppi di trasformazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
8 Spazi affini
§ 14 Spazi affini . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
§ 15 Sottospazi affini . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
§ 15.1 Opzionale: piani affini finiti e quadrati latini, greco-latini e magici
Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
117
117
123
127
135
9 Trasformazioni affini, incidenza e parallelismo
§ 16 Mappe affini . . . . . . . . . . . . . . . . . . . . . . . .
§ 17 Incidenza e parallelismo . . . . . . . . . . . . . . . . . .
§ 17.1 Proiezioni parallele e non dello spazio su un piano
Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
139
139
144
148
150
.
.
.
.
155
155
162
166
171
.
.
.
.
179
179
185
187
193
A Alcuni esercizi svolti
§ 1 Esercizi svolti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
§ 2 Seconda parte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
§ 3 Alcuni œrrori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
195
195
213
240
B Temi d’esame
§ 4 A.A. 2012-13
§ 5 A.A. 2011-12
§ 6 A.A. 2010-11
§ 7 A.A. 2009-10
243
243
251
259
266
10 Spazi euclidei e isometrie
§ 18 Spazi affini euclidei e isometrie . . . .
§ 19 Angoli e proiezioni ortogonali . . . . .
§ 19.1 Area e volume negli spazi affini
Esercizi . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
11 Spazi proiettivi e proiettività
§ 20 Spazi proiettivi . . . . . . . . . . . . . . .
§ 20.1 Isomorfismi proiettivi e proiettività
§ 20.2 Incidenza di sottospazi . . . . . . .
Esercizi . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
v
INDICE
Bibliografia
275
Indice analitico
277
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
vi
INDICE
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
Settimana N° 1
RICHIAMI, APERTI DI SPAZI METRICI
§ 1.
RICHIAMI
§ 1.1.
RICHIAMI DI LOGICA MATEMATICA
(Cfr.)*
Definire cos’è un enunciato, una proposizione (elemento primitivo della logica delle proposizioni). La
definizione è data in termini di una proprietà dell’enunciato: l’essere vero o falso (logica bivalente). Dunque
si assume che ogni proposizione abbia un solo valore di verità scelto tra i due: vero oppure falso. Sistemi logici
più completi possono averne altri (indeterminato, per esempio).
Variabili: Lettere dell’alfabeto (maiuscole o minuscole), se serve con sottoscritte (con apici o pedici): A,
x, B1 , j, …Assegnamento di valore alle variabili.
Connettivi logici: : (Operazioni binarie, unarie tra proposizioni). Si formano nuove proposizioni a partire
da proposizioni date.
- negazione: ¬p.
- congiunzione (AND): p ∧ q.
- disgiunzione (OR, p vel q): p ∨ q.
- disgiunzione esclusiva (p XOR q, aut p aut q) : p ⊕ q.
- implicazione (materiale) (se p allora q, p implica q):
p =⇒ q.
- doppia implicazione (se e solo se): p ⇐⇒ q.
Valori di verità: Vero (1) e Falso (0). Dato che gli enunciati p, q, …assumo valori di verità 0/1, è possibile
definire i connettivi logici scrivendo le corrispondenti tabelle di verità.
* Cfr:
M. Conti, D.L. Ferrario, S. Terracini, G. Verzini: Analisi matematica, Vol I, dal calcolo all’analisi, Apogeo, 2006. Cap. ℵ.
1
2
#1. RICHIAMI, APERTI DI SPAZI METRICI
p
1
0
¬p
0
1
p
1
0
1
0
q
1
1
0
0
p
1
0
1
0
p =⇒ q
1
1
0
1
q
1
1
0
0
p∧q
1
0
0
0
p
1
0
1
0
q
1
1
0
0
p q p∨q
1 1
1
0 1
1
1
1 0
0 0
0
p ⇐⇒ q
1
0
0
1
p
1
0
1
0
q
1
1
0
0
p XOR q
0
1
1
0
Simboli primitivi ed espressioni logiche: A partire da proposizioni date p, q, r, …si costruiscono espressioni composte (dette anche forme o espressioni, nel calcolo delle proposizioni), utilizzando le parentesi per
esplicitare la precedenza tra le operazioni. Alcune espressioni sono sempre vere (cioè assumono valore di verità
1 per ogni possibile scelta dei valori delle variabili), e si chiamano tautologie. Altre, invece, sono sempre false
(cioè assumono valore di verità 0 per ogni possibile scelta dei valori delle variabili): si chiamano contraddizioni.
Quando due espressioni hanno le medesime tavole di verità si dicono equivalenti. A e B sono equivalenti se e
solo se A ⇐⇒ B è una tautologia.
Le seguenti sono tautologie:
(i) A ∨ ¬A (terzo escluso);
(ii) ¬( A ∧ ¬A) (non contraddizione);
(iii) ¬(¬A) ⇐⇒ A (doppia negazione);
(iv) A ∧ A ⇐⇒ A, A ∨ A ⇐⇒ A;
(v) A ∨ B ⇐⇒ B ∨ A, A ∧ B ⇐⇒ B ∧ A (commutatività);
(vi) associatività:
( A ∨ B) ∨ C ⇐⇒ A ∨ ( B ∨ C );
( A ∧ B) ∧ C ⇐⇒ A ∧ ( B ∧ C );
(vii) Leggi distributive:
A ∧ ( B ∨ C ) ⇐⇒ ( A ∧ B) ∨ ( A ∧ C );
A ∨ ( B ∧ C ) ⇐⇒ ( A ∨ B) ∧ ( A ∨ C );
(viii) Leggi di de Morgan:
¬( A ∧ B) ⇐⇒ ¬A ∨ ¬B;
¬( A ∨ B) ⇐⇒ ¬B ∧ ¬A;
Le seguenti tautologie sono uno schema del ragionamento logico formale. Sono esempi di sillogismi,
riscritti nei termini della logica matematica delle proposizioni.
(i) ( A ∧ B) =⇒ A;
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
3
§ 1. RICHIAMI
(ii) ( A =⇒ B) ⇐⇒ (¬B =⇒ ¬A) (contronominale, contrapposizione, per assurdo);
(iii) ( A =⇒ B) ∧ A =⇒ B (modus ponens);
(iv) ( A =⇒ B) ∧ ¬B =⇒ ¬A (modus tollens);
(v) ( A =⇒ B) ∧ ( B =⇒ C ) =⇒ ( A =⇒ C ) (modus barbara, sillogismo ipotetico);
(vi) (( A ∨ B) ∧ ¬A) =⇒ B (sillogismo disgiuntivo).
Predicati: Quando una espressione p( x ) contiene delle variabili (x) che non sono state assegnate (variabili
libere) si dice predicato, proprietà, funzione proposizionale o anche enunciato aperto.
Quantificatori: I quantificatori trasformano enunciati aperti in proposizioni (vere o false). Se ci sono più
variabili libere, si possono usare più quantificatori. Le variabili con un valore assegnate oppure quantificate
da un quantificatore si dicono vincolate.
- Quantificatore universale: ∀ (per ogni, per tutti).
Uso: ∀x, p( x ).
Significato: Per ogni x (nell’universo U), la proprietà p( x ) è vera (cioè x gode della proprietà p).
Anche: ∀x ∈ U, p( x ).
- Quantificatore esistenziale: ∃ (esiste, esiste almeno un x).
Uso: ∃x : p( x ).
Significato: Esiste almeno un x (nell’universo U) per cui la proprietà p( x ) è vera (cioè x gode della
proprietà p). Anche: ∃x ∈ U : p( x ).
- ¬(∀x, p( x )) ⇐⇒ ∃x : ¬p( x ) (principio di negazione).
- ¬(∃x : p( x )) ⇐⇒ ∀x, ¬p( x ) (principio di negazione).
- ∀x, ∀y, p( x, y) ⇐⇒ ∀y, ∀, x p( x, y) (principio di scambio).
- ∃x : ∃y : p( x, y) ⇐⇒ ∃y : ∃ : x p( x, y) (principio di scambio).
- ∃x : ∀y, p( x, y) =⇒ ∀y, ∃x : p( x, y) (principio di scambio).
§ 1.2.
RICHIAMI DI TEORIA DEGLI INSIEMI
(Cfr.)*
Concetti primitivi (non definiti):
- Insieme di oggetti/elementi (anche: collezione, famiglia).
- Relazione di appartenenza: x ∈ X, x ̸∈ X.
* Cfr:
Stoll, Robert R.: Set theory and logic, (1961).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
4
#1. RICHIAMI, APERTI DI SPAZI METRICI
In altri termini, in questa teoria intuitiva (naive) degli insiemi* si definisce un insieme come collezione di
oggetti definiti e distinguibili (cioè si deve essere in grado di stabilire se x = y oppure x ̸= y). Si assumono
anche i seguenti principi:
(i) Principio di estensione: Due insiemi sono uguali se e solo se hanno gli stessi elementi.
(ii) Principio di astrazione: Una proprietà p( x ) definisce un insieme A con la convenzione che gli elementi
di A sono esattamente gli “oggetti” x per cui P ( x ) è vera:
A = {x : p( x )}.
(iii) Assioma della …
Estensioni di questa notazione:
{x ∈ A : p( x )} Esempio: {x ∈ R : x ≥ 4}
{ f ( x ) : p( x )} Esempio: {x 2 : x ∈ Z}
{1, 2, 3}, {1, 2}
Insieme
∅.
Relazioni tra insiemi:
vuoto† :
- (Inclusione) A ⊂ B (anche A ⊆ B): se x ∈ A implica x ∈ B. A è un sottoinsieme di B.
- A ⊃ B: se B ⊂ A.
- A = B se e solo se ( A ⊂ B) e ( B ⊂ A).
Operazioni con gli insiemi:
- Unione A ∪ B = {x : x ∈ A ∨ x ∈ B}.
- Intersezione A ∩ B = {x : x ∈ A ∧ x ∈ B} (due insiemi sono disgiunti quando A ∩ B = ∅).
- Prodotto cartesiano (insieme delle coppie ordinate) A × B = {(a, b) : a ∈ A, b ∈ B} = {(a, b) : a ∈
A ∧ b ∈ B}.
- Complemento di A in B ⊃ A (differenza tra insiemi): A′ (= Ac = B ∖ A) = {x ∈ B : x ̸∈ A}.
- Insieme delle parti: P( X ) = 2X = l’insieme dei sottoinsiemi di X (cioè l’insieme delle funzioni f : X →
{0, 1}).
∑
Operazioni per collezioni/famiglie di insiemi: come il simbolo di sommatoria può essere usato per
definire la somma di una serie di numeri, così i simboli di unione e intersezione possono essere usati per
famiglie di insiemi. Siano J e U due insiemi non vuoti e f : J → 2U una funzione. Per ogni i ∈ J, il sottoinsieme
f (i ) ∈ 2U può anche essere denotato con Xi , per esempio (cf. successioni xi vs. funzioni x = f (i )).
∪
Xi := {x ∈ U : (∃i ∈ I : x ∈ Xi )}, o equivalentemente‡
i∈J
* G.
Cantor (1845–1918). Il termine intuitiva è usato anche poiché la sola intuizione dovrebbe essere il criterio per stabilire cosa è
un insieme e cosa no; conseguenze di questo approccio sono famosi paradossi (contraddizioni), come il paradosso di Russell (1901):
sia X l’insieme di tutti gli insiemi che non appartengono a se stessi, cioè che non hanno se stessi come elementi (x ̸∈ x); se X appartiene
a se stesso, X ∈ X, allora per definizione X ̸∈ X, cioè X non appartiene a se stesso. Viceversa…
† Il concetto complementare di insieme vuoto è quello di insieme universo. S’intende che questo viene scelto – e sottinteso – in
dipendenza dal contesto. Per esempio: numeri naturali, numeri reali, …
‡ Si noti l’uso del simbolo “:=” usato per le definizioni o gli assegnamenti.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
§ 2. SPAZI METRICI E CONTINUITÀ: TOPOLOGIA DEGLI SPAZI METRICI
∪
i∈J
-
∩
i∈J
5
Xi := {x ∈ U : x ∈ Xi per qualche i ∈ I}.
Xi := {x ∈ U : (∀i ∈ J, x ∈ Xi )}, o equivalentemente
∩
i∈J
Xi := {x ∈ U : x ∈ Xi per tutti gli i ∈ J}.
In ultimo, si ricordi che una funzione f : X → Y si dice iniettiva se ∀x ∈ X, ∀y ∈ Y , ( x ̸= y =⇒ f ( x ) ̸=
f (q)), suriettiva se ∀y ∈ Y , ∃x ∈ X : f ( x ) = y, bijettiva (biunivoca) se è sia iniettiva sia suriettiva.
(1.1) Definizione. Sia f : X → Y una funzione. Se B ⊂ Y è un sottoinsieme di Y , la controimmagine di B è
f −1 ( B) = {x ∈ X : f ( x ) ∈ B}.
§ 2.
SPAZI METRICI E CONTINUITÀ: TOPOLOGIA DEGLI SPAZI METRICI
(Cfr.)*
Ricordiamo alcuni fatti elementari sugli spazi metrici.
(2.1) Definizione. Uno spazio metrico è un insieme X munito di una funzione d : X × X → R tale che per
ogni x1 , x2 , x3 ∈ X:
(i) ∀x1 , ∀x2 , d ( x1 , x2 ) ≥ 0 e d ( x1 , x2 ) = 0 se e solo se x1 = x2 .
(ii) Simmetria: d ( x1 , x2 ) = d ( x2 , x1 ).
(iii) Disuguaglianza triangolare: d ( x1 , x3 ) ≤ d ( x1 , x2 ) + d ( x2 , x3 ).
La funzione d viene chiamata metrica su X. Gli elementi di X vengono anche chiamati punti.
(2.2) Esempio. Metrica su R: d : R × R → R, d ( x, y) = |x − y|, ha le proprietà che per ogni x, y ∈ R
(i) |x − y| ≥ 0 e |x − y| = 0 ⇐⇒ x = y.
(ii) |x − y| = |y − x|.
(iii) |x − z| ≤ |x − y| + |y − z|.
Importante concetto associato al concetto di metrica e di distanza:
(2.3) Definizione. Palla aperta (intorno circolare) di raggio r e centro in x0 ∈ X (X spazio metrico):
Br ( x0 ) = {x ∈ X : d ( x, x0 ) < r}.
(Anche più esplicitamente Br ( x0 , X ))
* Cfr:
Cap I, §1; Sernesi Vol II [1].
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
6
#1. RICHIAMI, APERTI DI SPAZI METRICI
(2.4) Nota. Una funzione f : A ⊂ R → R è continua nel punto x ∈ A se per ogni ϵ > 0 esiste un δ > 0 tale
che |x − y| < δ =⇒ | f ( x ) − f (y)| < ϵ . Cioè, equivalentemente, f è continua in x ∈ R se per ogni ϵ > 0 esiste
δ > 0 tale che y ∈ Bδ ( x ) =⇒ f (y) ∈ Bϵ ( f ( x )), cioè
f ( Bδ ( x )) ⊂ Bϵ ( f ( x )).
In generale, f : A → R è continua in A ⊂ R se è continua per ogni x ∈ A, cioè se per ogni ϵ > 0 e per ogni
x ∈ A esiste δ (dipendente da ϵ e x) tale che f ( Bδ ( x )) ⊂ Bϵ ( f ( x )).
Dal momento che f (U ) ⊂ V ⇐⇒ U ⊂ f −1V (esercizio (1.7) a pagina 11), la funzione f è continua in
x ∈ A se e solo se per ogni ϵ > 0 esiste δ (dipendente da ϵ) tale che Bδ ( x ) ⊂ f −1 ( Bϵ ( f ( x ))).
(2.5) Definizione. Un sottoinsieme* U di uno spazio metrico X si dice intorno di un punto x ∈ U se contiene
un intorno circolare di x, cioè se esiste δ > 0 tale che
Bδ ( x ) ⊂ U
Se U è un intorno di x, si dice che x è interno ad U.
(2.6) Nota. Se U è un intorno di x e U ⊂ V , allora V è un intorno di x.
Con questo linguaggio, la definizione di continuità in x diventa: la controimmagine f −1 ( Bϵ ( f ( x ))) di ogni
intorno circolare di f ( x ) è un intorno di x. Notiamo anche il fatto importante che una palla è intorno di ogni
suo punto (esercizio (1.10) a pagina 11).
(2.7) Se f : A ⊂ X → Y è continua in A, allora la controimmagine di ogni palla Br (y) in Y (intervallo!) è
intorno di ogni suo punto.
Dim. Se x ∈ f −1 Bϵ (y), cioè f ( x ) ∈ Bϵ (y), allora esiste r abbastanza piccolo per cui Br ( f ( x )) ⊂ Bϵ (y). Dal
momento che f è continua in x, f −1 ( Br ( f ( x ))) è intorno di x. Ma
Br ( f ( x )) ⊂ Bϵ (y) =⇒ f −1 ( Br ( f ( x ))) ⊂ f −1 ( Bϵ (y))
e quindi f −1 ( Bϵ (y)) è un intorno di x.
⨳
(2.8) Definizione. Un sottoinsieme A ⊂ X di uno spazio metrico si dice aperto se è intorno di ogni suo punto
(equivalentemente, ogni punto di A ha un intorno circolare tutto contenuto in A, o, equivalentemente, ogni
punto di A ha un intorno tutto contenuto in A).
(2.9) Una palla aperta Br ( x ) è un aperto.
Dim. (Esercizio (1.10) di pagina 11)
⨳
(2.10) Una funzione f : X → Y è continua in X se e soltanto se la controimmagine in X di ogni palla Br (y)
di Y è un aperto.
Dim. Per la proposizione precedente se una funzione è continua allora la controimmagine di ogni palla è un
aperto. Viceversa, assumiamo che la controimmagine di ogni palla Br (y) è un aperto. Allora, per ogni x ∈ X
e per ogni ϵ > 0
f −1 ( Bϵ ( f ( x )))
è un aperto, ed in particolare è un intorno di x; per definizione di intorno, quindi per ogni x e ϵ esiste δ > 0
tale che Bδ ( x ) ⊂ f −1 ( Bϵ ( f ( x ))), cioè f è continua.
⨳
*U
può non essere aperto…
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
§ 2. SPAZI METRICI E CONTINUITÀ: TOPOLOGIA DEGLI SPAZI METRICI
§ 2.1.
7
PROPRIETÀ DEI SOTTOINSIEMI APERTI
Se A ⊂ X è aperto, allora per ogni x ∈ A esiste r = r ( x ) > 0 tale che Br ( x ) ⊂ A, e quindi A è unione di
(anche infinite) palle aperte
∪
A=
Br ( x ) ( x ).
x∈A
Viceversa, si può mostrare che l’unione di una famiglia di palle aperte è un aperto. Quindi vale:
(2.11) Un sottoinsieme A ⊂ X è aperto se e solo se è unione di intorni circolari (palle).
(2.12) Corollario. L’unione di una famiglia qualsiasi di aperti è un aperto.
(2.13) Nota. Osserviamo che le dimostrazioni appena viste per funzioni reali non utilizzano null’altro che proprietà degli intorni circolari in R. Dato che queste proprietà valgono in generale per spazi metrici, le medesime
proposizioni valgono per spazi metrici.
(2.14) Sia X uno spazio metrico. Allora l’insieme vuoto e X sono aperti.
(2.15) Siano A e B due aperti di X spazio metrico. Allora l’intersezione A ∩ B è un aperto.
Dim. Sia x ∈ A ∩ B. Dato che A e B sono aperti, esistono r A e r B > 0 tali che
Br A ( x ) ⊂ A e Br B ( x ) ⊂ B.
Sia r il minimo tra r A e r B : Br ⊂ Br A , Br ⊂ Br B , e quindi Br ⊂ A ∧ Br ⊂ B( ⇐⇒ Br ⊂ A ∩ B). Quindi A ∩ B è
intorno di x e la tesi segue dall’arbitrarietà di x.
⨳
Riassumiamo le proprietà degli aperti: consideriamo il sottoinsieme dell’insieme delle parti A ⊂ 2X che
consiste di tutti i sottoinsiemi aperti di X.
(2.16) L’insieme A di tutti gli aperti (secondo la definizione (2.8) di pagina 6) di uno spazio metrico X verifica
le seguenti proprietà:
(i) ∅ ∈ A, X ∈ A,
∪
(ii) B ⊂ A =⇒ B∈B B ∈ A,
∩
(iii) B ⊂ A, B è finito, allora B∈B B ∈ A.
(2.17) Possiamo riassumere le proprietà degli intorni circolari di uno spazio metrico X:
(i) Ogni elemento x ∈ X ha almeno un intorno (aperto) B ∋ x.
(ii) L’intersezione di due intorni circolari B1 ∩ B2 è un aperto, e quindi per ogni x ∈ B1 ∩ B2 esiste un terzo
intorno circolare B di x per cui x ∈ B ⊂ B1 ∩ B2 .
(2.18) Definizione. La topologia di uno spazio metrico X è la famiglia A di tutti i sottoinsiemi aperti definita
poco sopra. Si dice anche che A è la topologia di X generata dagli intorni circolari (definiti a partire dalla
metrica).
( X, d ) 7→ ( X, d, A)
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
8
#1. RICHIAMI, APERTI DI SPAZI METRICI
Si possono riassumere tutti i fatti visti sulle funzioni continue nel seguente teorema.
(2.19) Teorema. Una funzione f : X → Y (spazi metrici) è continua se e solo se la controimmagine di ogni
aperto di Y è un aperto di X.
Dim. Sia V un aperto di Y . Allora è unione di intorni circolari B j := Br j (y j )
∪
Bj
V=
j∈J
e dunque la sua controimmagine
∪ ∪
f −1V = f −1 B j =
f −1 B j
j∈J
j∈J
è unione di aperti, e quindi è un aperto. Viceversa, se la controimmagine di ogni aperto in Y è un aperto di X,
allora in particolare la controimmagine di ogni intorno circolare di Y è un aperto di X, e quindi f è continua. ⨳
La continuità di una funzione quindi dipende solo dal comportamento di f sulle famiglie di aperti degli
spazi in considerazione, e non dal valore della metrica.
Dal momento che per determinare la continuità di una funzione è sufficiente conoscere le famiglie di
aperti (nel dominio e codominio) e le controimmagini degli stessi, diciamo che due metriche sono equivalenti
se inducono la stessa topologia.
(2.20) Definizione. Si dice che due metriche sullo stesso insieme X sono equivalenti se inducono la stessa
topologia su X.
(2.21) Due metriche d e d ′ su X sono equivalenti se e solo se la seguente proprietà è vera: per ogni x ∈ X
′
′
e per ogni palla Brd ( x ) (nella metrica d) esiste r ′ > 0 tale che Brd′ ( x ) ⊂ Brd ( x ) (dove Brd′ ( x ) è la palla nella
′
metrica d ′ ) e, viceversa, per ogni r ′ e x esiste r tale che Brd ( x ) ⊂ Brd′ ( x ).
Dim. Supponiamo che le due metriche d e d ′ siano equivalenti e siano x e r > 0 dati. Per (2.9) la palla Brd ( x )
è aperta nella topologia indotta da d e quindi anche nella topologia indotta da d ′ : pertanto esiste r ′ tale che
′
Brd′ ( x ) ⊂ Brd ( x ). Analogamente se si scambia il ruolo di d e d ′ . Viceversa, supponiamo A aperto secondo la
topologia indotta da d. Per ogni x ∈ A esiste, per definizione, r = r ( x ) > 0 tale che
Brd ( x ) ⊂ A,
ed un corrispondente r ′ > 0 tale che
′
Brd′ ( x ) ⊂ Brd ( x ).
Cioè, per ogni x esiste r ′ = r ′ ( x ) > 0 tale che
′
Brd′ ( x ) ⊂ A,
e quindi A è aperto nella topologia indotta da d ′ . Analogamente, ogni aperto nella topologia indotta da d ′ è
anche aperto nella topologia indotta da d e quindi le due topologie coincidono.
⨳
(2.22) Esempio. Esempi di metriche su R2 :
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
§ 2. SPAZI METRICI E CONTINUITÀ: TOPOLOGIA DEGLI SPAZI METRICI
(i) d ( x, y) =
√
9
( x1 − y1 )2 + ( x2 − y2 )2 = |x − y| (metrica euclidea).
0
(ii) d ( x, y) =
1
se x = y
(metrica discreta).
altrimenti
(iii) d ( x, y) = |x1 − y1 | + |x2 − y2 |.
(iv) d ( x, y) = max |xi − yi |.
i=1,2
(v) d ( x, y) = min |xi − yi | (?).
i=1,2
(vi) d ( x, y) = ( x1 − y1 )2 + ( x2 − y2 )2 (?).
(2.23) Esempio. Sia p ∈ N un primo ≥ 2. Sappiamo che ogni intero n ∈ Z ha una decomposizione in fattori
primi, per cui esiste unico l’esponente α per cui n = pα k, dove l’intero k non contiene il fattore primo p. Si
consideri in Z la funzione | · | p definita da
|pα k| p = p−α
ogni volta che k è primo con p, e |n| p = 0 quando n = 0. Sia quindi d : Z × Z → Q ⊂ R la funzione definita
da d ( x, y) = |x − y| p . Si può vedere che è una metrica su Z (perché?).
(2.24) Esempio. Consideriamo la funzione f : R2 → R, definita da
x|y|
se ( x, y) ̸= (0, 0);
2
x + y2
f ( x, y) =
0
se ( x, y) = (0, 0).
Osserviamo che per ogni x0 ∈ R la funzione
f ( x0 , −) : R → R
è continua, e che per ogni y0 ∈ R la funzione
f (−, y0 ) : R → R
è continua. Si può dedurre che la funzione f è continua, quindi? Se f fosse continua, dovrebbe essere continua
anche la funzione
t|t|
t
φ(t ) = f (t, t ) = 2 =
,
2|t|
2t
che continua non è, malgrado le apparenze.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
10
#1. RICHIAMI, APERTI DI SPAZI METRICI
ESERCIZI
(1.1) Dimostrare che:
(i) L’insieme vuoto ∅ è unico.
(ii) per ogni insieme A, ∅ ⊂ A.
(iii) per ogni insieme A, A ⊂ A.
(iv) per ogni insieme A, A = A ∪ ∅.
(1.2) Dimostrare che se A, B, C e X sono insiemi arbitrari:
(i) A ∪ B = B ∪ A.
(ii) A ∩ B = B ∩ A.
(iii) ( A ∪ B) ∪ C = A ∪ ( B ∪ C ).
(iv) ( A ∩ B) ∩ C = A ∩ ( B ∩ C ).
(v) A ∪ ( B ∩ C ) = ( A ∪ B) ∩ ( A ∪ C ).
(vi) A ∩ ( B ∪ C ) = ( A ∩ B) ∪ ( A ∩ C ).
(vii) Se A ⊂ X, allora X ∖ ( X ∖ A) = A.
(viii) Se A, B ⊂ X, allora X ∖ ( A ∪ B) = ( X ∖ A) ∩ ( X ∖ B).
(ix) Se A, B ⊂ X, allora X ∖ ( A ∩ B) = ( X ∖ A) ∪ ( X ∖ B).
(1.3) Dimostrare che le seguenti proposizioni sono equivalenti:
(i) A ⊂ B;
(ii) A ∩ B = A;
(iii) A ∪ B = B.
(1.4) Costruire una bijezione tra l’insieme delle parti P( X ) di un insieme X e l’insieme delle funzioni f : X →
{0, 1}.
*(1.5) Siano A e B due insiemi e X l’insieme definito da X = {{{a}, {a, b}} : a ∈ A, b ∈ B}. Mostrare che
{{a}, {a, b}} = {{b}, {b, a}} se e solo se a = b e costruire una bijezione X → A × B.
*(1.6) Sia f : X → Y una funzione tra insiemi. Dimostrare che, se A ⊂ X e B ⊂ Y sono sottoinsiemi di X e Y :
(
)
(i) f f −1 ( B) ⊂ B.
(ii) f è suriettiva se e solo se per ogni B ⊂ Y , f f −1 ( B) = B.
(iii) A ⊂ f −1 f ( A).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
11
Esercizi
(1.7) Sia f : X → Y una funzione tra insiemi, A ⊂ X e B ⊂ Y sottoinsiemi di X e Y . Dimostrare che:
f ( A) ⊂ B ⇐⇒ A ⊂ f −1 B.
(1.8) Sia X un insieme e f : X × X → R una funzione tale che:
(i) f ( x, y) = 0 se e solo se x = y.
(ii) ∀x, y, z ∈ X, f ( x, z ) ≤ f ( x, y) + f (z, y).
Dimostrare che f è una metrica su X.
(1.9) Dimostrare che ogni intervallo aperto di R è intorno di ogni suo punto.
*(1.10) Dimostrare che in uno spazio metrico ogni palla è intorno di ogni suo punto (cioè è un aperto).
(1.11) Dimostrare che l’unione di una famiglia qualsiasi di palle aperte di uno spazio metrico è un aperto.
*(1.12) Sia {B j } j∈J una famiglia di insiemi in Y e f : X → Y una funzione. Dimostrare che
∪ ∪
f −1 B j
f −1 B j =
j∈J
j∈J
(1.13) Quali tra questi sottoinsiemi di R2 (con la metrica euclidea) sono aperti?
(i) {( x, y) ∈ R2 : x 2 + y2 < 1} ∪ {(1, 0)}.
(ii) {( x, y) ∈ R2 : x 2 + y2 ≤ 1}.
(iii) {( x, y) ∈ R2 : x 2 + y2 > 1}.
(iv) {( x, y) ∈ R2 : x 4 + y4 ≤ −1}.
(v) {( x, y) ∈ R2 : x 4 + y4 ≥ 1}.
*(1.14) È vero che l’intersezione di una famiglia qualsiasi di intorni aperti di R è un aperto? Se la famiglia è
finita?
*(1.15) Dimostrare che, dato uno spazio metrico X e un punto x0 ∈ X, la funzione f ( x ) = d ( x, x0 ) è continua.
(1.16) Dimostrare che una metrica d e la metrica 2d sono equivalenti. Quali delle metriche dell’esempio (2.22)
sono equivalenti?
(1.17) Trovare gli errori inseriti nelle lezioni (valido anche nelle prossime lezioni).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
12
#1. RICHIAMI, APERTI DI SPAZI METRICI
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
Settimana N° 2
CHIUSI E TOPOLOGIE
§ 3.
SOTTOINSIEMI CHIUSI DI UNO SPAZIO METRICO
(3.1) Definizione. Sia A ⊂ X un sottoinsieme di uno spazio metrico X. Un punto x ∈ X si dice di accumulazione (anche: punto limite) per A in X se per ogni r > 0 l’intersezione Br ( x ) ∩ A contiene almeno un punto
oltre al centro x.
Idea: i punti di accumulazione di A dovrebbero essere i punti limite di successioni in A. Se A = {xn }n∈N ⊂ X
è una successione convergente, allora il limite della successione è punto limite di A. È davvero cosí?
(3.2) Se x ∈ X è di accumulazione per A ⊂ X in X, e A ⊂ B ⊂ X, allora x è di accumulazione per B in X.
Dim. Per ogni r > 0 l’intersezione Br ( x ) ∩ A contiene almeno un punto oltre al centro x, e dato che A ⊂ B si
ha
Br ( x ) ∩ A ⊂ Br ( x ) ∩ B,
quindi Br ( x ) ∩ B contiene almeno un punto oltre a x, cioè x è di accumulazione per B.
⨳
(3.3) Definizione. Sia X uno spazio metrico. Un sottoinsieme C ⊂ X si dice chiuso se contiene tutti i suoi
punti di accumulazione.
(3.4) Il complementare in X di un chiuso è aperto. Il complementare in X di un aperto è chiuso. Quindi C ⊂ X
è chiuso se e solo se X ∖ C è aperto.
Dim. Sia C ⊂ X un chiuso e x ∈ X ∖ C. Dato che C è chiuso, x non può essere un punto di accumulazione,
e quindi esiste r > 0 per cui Br ( x ) ∩ C = ∅. Ma allora Br ( x ) ⊂ ( X ∖ C ) e quindi X ∖ C è intorno di x. Per
l’arbitrarietà di x in X ∖ C si ha che X ∖ C è aperto.
Viceversa, sia A ⊂ X un aperto e sia C il complementare X ∖ A. Se x è un punto di accumulazione di C
allora non è un punto di A: infatti, A sarebbe intorno di x, per cui ci sarebbe r > 0 tale che Br ( x ) ⊂ A, ma allora
Br ( x ) ∩ C ⊂ A ∩ C = ∅, cioè x non sarebbe di accumulazione per C. In altre parole, i punti di accumulazione
di C sono contenuti in C e dunque C è chiuso.
⨳
(3.5) L’insieme C di tutti i chiusi di uno spazio metrico X verifica le seguenti proprietà:
(i) ∅ ∈ C, X ∈ C,
13
14
#2. CHIUSI E TOPOLOGIE
(ii) B ⊂ C =⇒
∩
∈ C,
∪
(iii) B ⊂ C, B è finito, allora C∈B C ∈ C.
C∈B C
Dim. Basta considerare la proposizione (2.16) e il fatto che i chiusi sono i complementari degli aperti (dualità),
oppure applicare direttamente la definizione (esercizio).
⨳
(3.6) Definizione. Sia A ⊂ X. L’unione di A con l’insieme di tutti i suoi punti di accumulazione si dice chiusura
di A in X e si indica con A.
(3.7) Nota. La chiusura A di A contiene A. Inoltre, se A ⊂ B, si ha che A ⊂ B (esercizio (2.6)).
(3.8) Proposizione. Un sottoinsieme A ⊂ X è chiuso se e soltanto se A = A.
Dim. Se A è chiuso, allora contiene i suoi punti di accumulazione, e quindi A = A. Viceversa, se A = A, allora
A contiene i suoi punti di accumulazione, e quindi è chiuso.
⨳
(3.9) La chiusura A di A è uguale all’intersezione di tutti i chiusi che contengono A, ed è un chiuso. È il più
piccolo insieme chiuso che contiene A.
Dim. Consideriamo un insieme chiuso C che contiene A. Dato che A ⊂ C, si ha che A ⊂ C, ed essendo C
chiuso si ha: C = C. Ma allora A ⊂ C, cioè A è contenuto in tutti i chiusi che contengono A. Sia K l’intersezione
di tutti i chiusi che contengono A. Allora K è chiuso (perché intersezione di chiusi) e A ⊂ K, da cui A ⊂ K. Se
x ̸∈ A, allora x non è né punto di A né punto di accumulazione, e dunque esiste r > 0 per cui Br ( x ) ∩ A = ∅;
dato che Br ( x ) è aperto, il suo complementare C = X ∖ Br ( x ) è un chiuso che non contiene x e che contiene
A. Ma questo implica che K ⊂ C (dato che C è un chiuso che contiene A) e che quindi nemmeno K contiene x
(dato che C non contiene x). Quindi K non contiene nessun x ̸∈ A, cioè K ⊂ A. Dunque K = A, A è chiuso ed
è uguale all’intersezione di tutti i chiusi che contengono A.
⨳
(3.10) Sia f una funzione f : X → Y tra spazi metrici. Le tre proposizioni seguenti sono equivalenti:
(i) f è continua
(ii) ∀A ⊂ X, f ( A) ⊂ f ( A).
(iii) per ogni C ⊂ Y chiuso, la sua controimmagine f −1 (C ) ⊂ X è chiuso.
Dim. Supponiamo che la funzione f sia continua. Mostriamo che 1 =⇒ 2. Sia x ∈ A. Se x ∈ A, allora
f ( x ) ∈ f ( A) ⊂ f ( A), e quindi f ( x ) ∈ f ( A). Se x ∈ A ∖ A, allora x deve essere di accumulazione per A.
Vogliamo mostrare che o f ( x ) appartiene a f ( A) oppure ne è punto di accumulazione. Se f ( x ) ∈ f ( A), allora
non c’è altro da dimostrare. Supponiamo altrimenti che f ( x ) ̸∈ f ( A). Ora, dato che f è continua, per ogni
r > 0 la controimmagine dell’intorno circolare f −1 ( Br ( f ( x ))) è un intorno di x, e quindi esiste ϵ > 0 (che
dipende da r e x) per cui Bϵ ( x ) ⊂ f −1 ( Br ( f ( x ))). Ma x è di accumulazione per A, e quindi Bϵ ( x ) ∩ A ̸= {x},
cioè esiste un punto z ∈ Bϵ ( x ) ∩ A, z ̸= x, ed in particolare
f (z ) ⊂ Br ( f ( x ))
Dato che stiamo supponendo f ( x ) ̸∈ f ( A) e che z ∈ A, si ha che f (z ) ∈ f ( A) e quindi f (z ) ̸= f ( x ). Cioè, per
ogni r > 0 l’intorno Br ( f ( x )) contiene punti di f ( A) diversi da f ( x ), e quindi f ( x ) è di accumulazione per
f ( A).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
15
§ 3. SOTTOINSIEMI CHIUSI DI UNO SPAZIO METRICO
Ora dimostriamo che (ii) =⇒ (iii). Sia C ⊂ Y un chiuso e A = f −1C la sua controimmagine in X. Dal
momento che f ( A) ⊂ f ( A), e che f ( A) ⊂ C, f ( A) ⊂ C = C, e quindi A ⊂ f −1C. Ne segue che A ⊂ A, da cui
A = A, visto che anche A ⊂ A.
Ora dimostriamo che (iii) =⇒ (i). Se A ⊂ Y è aperto, allora C = Y ∖ A è chiuso in Y , e quindi f −1C è
chiuso in X, il che implica che X ∖ f −1C è aperto. Ma
X ∖ f −1C = {x ∈ X : f ( x ) ̸∈ C} = f −1 ( X ∖ C ) = f −1 ( A),
quindi f −1 ( A) è aperto.
⨳
(3.11) Nota. Continuità: f (lim ) = lim ( f ) …
Ancora: Tutti i punti di uno spazio metrico sono chiusi. Infatti, se y ̸= x ∈ X e r = d ( x, y), allora r > 0 e
y ∈ Br/2 (y) ̸∋ x, cioè X ∖ {x} è aperto.
(3.12) Esempio. Si consideri la funzione f : X = R → Y = R definita da f ( x ) = ex . Se A = X, allora A è
chiuso e A = A = R, mentre
f ( A) = {ex : x ∈ R} = (0, +∞)
f ( A) = [0, +∞).
Quindi si ha
f ( A) ⊂ f ( A),
ma f ( A) ̸= f ( A).
(3.13) Esempio. Se A = Z ⊂ R, allora A non ha punti di accumulazione, dato che se ϵ < 1 e n ∈ Z, allora
Bϵ (n) ∩ Z = {n}. I punti di accumulazione dell’insieme
{
}
1
: n ∈ Z, n > 0
n
sono dati dall’insieme {0}. Perché (esercizio).
(3.14) Esempio. Quali sono i punti di accumulazione dell’insieme X ⊂ Q costituito da tutti i numeri che si
possono scrivere come somme
l
∑
1
k
j=1 j
per certi interi k j ≥ 2 tutti distinti k j ∈ N, j = 1, . . . , l (cioè tali che i ̸= j =⇒ ki ̸= k j )? Esercizio (2.3),
google: egyptian fractions.
Opzionale: alcuni passi delle soluzione di questo esempio/esercizio.
(Passo 1) Se x è di accumulazione per X, allora x ≥ 0.
Dim. Basta mostrare che se x < 0, allora x non è di accumulazione per X. Se x < 0, allora esiste ϵ > 0 tale che
Bϵ ( x ) è composto da soli numeri < 0; quindi Bϵ ( x ) non contiene punti di X e x non è di accumulazione. ⨳
Sia ora x ≥ 0. Se x = 0, allora la successione {1/n} converge a x, e quindi 0 è di accumulazione per X.
Sia invece x > 0. Per ogni n ∈ N, n ≥ 2 e per ogni x ∈ R, x > 0, sia
f (n, x ) = min{k ∈ N : k ≥ n ∧
1
≤ x},
k
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
16
#2. CHIUSI E TOPOLOGIE
cioè
⌈ ⌉
1
f (n, x ) = max(n,
),
x
dove la funzione ceiling ⌈x⌉ è definita da
⌈x⌉ = min{k ∈ N : k ≥ x}.
Quindi si ha che
n
se 1/(n − 1) ≤ x
⌈ ⌉
f (n, x ) =
1
altrimenti .
x
Definiamo una successione n1 , n2 , . . . , nl , . . . di interi e una corrispondente successione x0 = x, x1 , …, xl
di reali nel modo seguente. Ricordiamo che f non è definita per x ≤ 0.
1
n1
1
n2 = f (n1 + 1, x1 ),
x2 = x1 −
n2
1
n3 = f (n2 + 1, x2 ),
x3 = x2 −
n3
..
..
.
.
1
nl = f (nl−1 + 1, xl−1 ) xl = xl−1 −
nl
n1 = f (2, x ),
x1 = x −
Per definizione si ha
nk > nk−1 ,
(3.15)
1
≤ xk−1 .
nk
Se per un certo k si ha xk = 0, la successione termina. Si tratta certamente di x ∈ Q, quindi se x ̸∈ Q, la
successione non può terminare. *
(Passo 2) La successione nk è strettamente crescente. La successione xk è strettamente decrescente e positiva.
Dim. Dato che f (n, x ) ≥ n, si ha nk = f (nk−1 + 1, xk−1 ) ≥ nk−1 + 1, per ogni k. Inoltre nk > 0, e quindi
1
xk = xk−1 −
< xk−1 , quindi xk è strettamente decrescente. Per la (3.15), xk ≥ 0 per ogni k (ed è 0 solo
nk
quando termina la successione).
⨳
Osserviamo che se x > 1/2, i primi n termini della successione saranno k1 = 2, k2 = 3, …, kn = n + 1, ed
esiste certamente un n tale che
1 1
1
1 1
1
1
+ +···+
≤ x < + +···+
+
,
2 3
n+1
2 3
n+1 n+2
dato che la serie armonica diverge.
* Ma
quando questa successione termina? Su ogni x razionale positivo o solo su alcuni?
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
17
§ 3. SOTTOINSIEMI CHIUSI DI UNO SPAZIO METRICO
(Passo 3) Sia x > 0, x ̸∈ Q, e nk , xk le successioni corrispondenti. Allora
∞
∑
1
= x,
n
k
k=1
e quindi x è di accumulazione per X.
Dim. Le somme parziali
Sn =
n
∑
1
n
k=1 k
verificano per ogni n
x = Sn + xn .
Basta quindi mostrare che xn → 0. Osserviamo che non può essere definitivamente nk = k + 1, perché la serie
(armonica) diverge. Quindi devono esserci infiniti k per cui risulta
nk+1 = f (nk + 1, xk ) ̸= nk + 1,
cioè infiniti k per cui
xk <
Ma
1
.
nk
1
è una successione monotona decrescente che tende a zero, e 0 < xk , quindi xk → 0.
nk
⨳
(Passo 4) Ogni reale x ≥ 0 è di accumulazione per X.
Dim. Se x ∈ R, x ≥ 0, in ogni intorno Bϵ ( x ) cadono certamente infiniti punti irrazionali positivi, e quindi
almeno uno diverso da x, che chiamiamo z. Dato che Bϵ ( x ) è intorno aperto di z, che è di accumulazione per X,
in Bϵ ( x ) ci sono altri punti di X, e quindi x è di accumulazione per X.
⨳
Risultato: i punti di accumulazione di X sono
{x ∈ R : x ≥ 0}.
(3.16) Nota. Quanti termini servono per scrivere
1 1
1
1 1
1
1
+ + . . . + ≤ 100 < + + . . . + +
?
2 3
n
2 3
n n+1
Osserviamo che
∫
n+1
ln(n + 1) − ln 2 =
2
dx 1 1
1
< + +...+ <
x
2 3
n
∫
n
1
quindi dovrà essere
ln(n + 1) − ln 2 < 100 < ln(n + 1),
cioè più o meno dieci septillioni di termini
n ∈ (e100 − 1, 2e100 − 1).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
dx
= ln n,
x
18
#2. CHIUSI E TOPOLOGIE
§ 4.
SPAZI TOPOLOGICI
(Cfr.)*
Se si analizzano le dimostrazioni delle proprietà finora vista degli aperti, chiusi e funzioni continue di
spazi metrici, ci si rende conto che la metrica serve solo per definire la famiglia degli intorni circolari e alcune
proprietà caratterizzanti.
Sia X un insieme. Una famiglia di sottoinsiemi A ⊂ 2X che verifica le proprietà di (2.16) consente di fatto
di introdurre una definizione non solo metrica di continuità.
(4.1) Definizione. Una famiglia A ⊂ 2X di sottoinsiemi di un insieme X si dice topologia se verifica le seguenti
proprietà:
(i) ∅ ∈ A, X ∈ A,
∪
(ii) B ⊂ A =⇒ B∈B B ∈ A,
∩
(iii) B ⊂ A, B è finito, allora B∈B B ∈ A.
Uno spazio X munito di una topologia A ⊂ 2X (spesso indicata con la lettera τ) viene detto spazio topologico†
e gli elementi di A si dicono gli aperti di X.
È banale verificare che la definizione di aperto di uno spazio metrico consente di associare ad ogni spazio
metrico una topologia come nella definizione (2.18), che è detta anche topologia metrica. Sappiamo già che
spazi metrici diversi possono avere la stessa topologia metrica (se le metriche sono equivalenti). Non tutti
gli spazi topologici però ammettono l’esistenza di una metrica che genera la topologia (cioè, non tutti sono
metrizzabili).
(4.2) Esempio. Consideriamo le due topologie estreme, cioè quella con più aperti possibile e quella con meno
aperti possibile.
(i) Topologia banale: ha solo i due aperti A = {∅, X} ⊂ 2X (che devono esistere per poter soddisfare tutti
gli assiomi della definizione (4.1)).
(ii) Topologia discreta: tutti i sottoinsiemi sono aperti A = 2X .
(iii) Topologia metrica: in uno spazio metrico, la topologia generata dalla metrica si chiama topologia
metrica.
(4.3) Esempio. Su Z sia A la famiglia di tutte le unioni di progressioni aritmetiche (Ua,b = {a + kb : k ∈ Z} ⊂
Z). Allora la famiglia A è una topologia di Z, e in questa topologia, le progressioni Ua,n sono sia aperti che
chiusi. Perché?
Questo serve a rilassare il concetto di “vicinanza” che è intrinseco per gli spazi metrici.
(4.4) Definizione. Se X è uno spazio topologico, A ⊂ X è un sottoinsieme e x ∈ A, si dice che A è un intorno
di x se contiene un aperto B tale che x ∈ B ⊂ A.‡ Allora x si dice punto interno di A.
* Cfr:
Cap I § 2-3, Sernesi Vol II [1].
come uno spazio metrico X è più propriamente una coppia ( X, d ), anche uno spazio topologico dovrebbe essere indicato
come coppia ( X, τ ) con τ ⊂ 2X , ma per brevità la topologia non viene espressamente indicata, se non quando necessario.
‡ Alcuni definiscono intorni solo gli aperti che contengono x.
† Così
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
19
§ 4. SPAZI TOPOLOGICI
Possiamo anche definire funzioni continue usando la caratterizzazione del teorema (2.19).
(4.5) Definizione. Siano X e Y spazi topologici. Una funzione f : X → Y si dice continua se per ogni aperto
A ⊂ Y la controimmagine f −1 A è aperto di X.
Anche il concetto di sottoinsieme chiuso, di punto di accumulazione e di chiusura può essere esteso agli
spazi topologici, utilizzando il fatto che gli aperto sono per definizione intorni dei propri punti.
(4.6) Definizione. Sia A ⊂ X un sottoinsieme di uno spazio topologico X. Un punto x ∈ X si dice di accumulazione (anche: punto limite) per A in X se per ogni intorno B di x l’intersezione B ∩ A contiene almeno un
altro punto oltre a x. La chiusura A di A è definita come l’unione di A con tutti i suoi punti di accumulazione.
(4.7) Sia X uno spazio topologico e C ⊂ X un suo sottoinsieme. Le seguenti proposizioni sono equivalenti.
(i) X ∖ C è aperto.
(ii) C contiene tutti i suoi punti di accumulazione.
Dim. Basta ripetere la dimostrazione di (3.4) sostituendo ovunque intorni aperti invece che intorni circolari.
⨳
(4.8) Definizione. Un sottoinsieme C ⊂ X di uno spazio topologico si dice chiuso se una delle due proposizioni
equivalenti di (4.7) è verificata.
Ancora, cambiando di poco la dimostrazione di (3.9) si può dimostrare che (vedi esercizio (2.9)):
(4.9) La chiusura A di un sottoinsieme A ⊂ X è il più piccolo sottoinsieme chiuso di X che contiene A (in altre
parole: l’intersezione di tutti i chiusi che contengono A). In particolare, è un chiuso.
(4.10) Definizione. Se A ⊂ X è un sottoinsieme tale che A = X, allora si dice che A è denso in X.
§ 4.1.
BASE DI UNA TOPOLOGIA
La topologia metrica è generata dalla famiglia di tutti gli intorni circolari, nel senso che gli aperti sono tutti
e soli le unioni di intorni circolari. Ci si può chiedere quando una famiglia di insiemi genera una topologia in
questo modo. Basta prendere le proprietà degli intorni circolari di spazi metrici di (2.17).
(4.11) Definizione. Una famiglia di sottoinsiemi B ⊂ 2X di un insieme X si dice base se le seguenti proprietà
sono soddisfatte:
(i) per ogni x ∈ X esiste almeno un elemento della base B ∈ B che contiene x (equivalentemente, X =
∪
B∈B B).
(ii) Se B1 , B2 ∈ B e x ∈ B1 ∩ B2 , allora esiste Bx ∈ B tale che x ∈ Bx ⊂ B1 ∩ B2 (equivalentemente, B1 ∩ B2
è unione di elementi della base).
Possiamo riscrivere (2.17) dicendo: gli intorni circolari costituiscono una base. Il modo di generare una
topologia a partire da una base procede dall’osservazione che gli aperti sono le unioni di intorni circolari.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
20
#2. CHIUSI E TOPOLOGIE
(4.12) Sia X un insieme. Data una base B ⊂ 2X , sia A ⊂ 2X la famiglia di tutte le unioni di elementi di B
unita a ∅. Allora A è una topologia per X ed è la più piccola topologia in cui gli elementi della base B sono
aperti.
Dim. Esercizio.
⨳
(4.13) Definizione. La topologia generata come in (4.12) si dice topologia generata dalla base B.
(4.14) Esempio. In X = N = {1, 2, 3, . . .} siano Bi = {ki : k ∈ N} = {n ∈ N : n ≡ 0 mod i}. Sono una
base? La topologia in N è quella metrica? È quella discreta? È metrizzabile (cioè può essere generata da una
metrica)?
§ 4.2.
TOPOLOGIA INDOTTA (TOPOLOGIA DEI SOTTOSPAZI, SOTTOSPAZI TOPOLOGICI)
(Cfr.)*
Se X è uno spazio topologico, la topologia τ di X induce una topologia, detta topologia indotta per restrizione sui sottospazi Y ⊂ X. Cioè, per definizione A ⊂ Y è aperto se e solo se esiste U ⊂ X aperto la cui
intersezione con Y è A: gli aperti di Y sono tutte e sole le intersezioni
A= Y ∩U
di aperti di X con Y . Quando si considerano sottoinsiemi di uno spazio topologico, si assume che abbiano la
topologia indotta, se non esplicitamente indicato in altro modo.
(4.15) Nota. Tutti gli intervalli del tipo [a, b), con a < b costituiscono una base per la retta reale R. La topologia
che ne risulta ha piú aperti di quella generata dalla metrica euclidea. Gli intervalli del tipo (−∞, b), con b ∈ R
sono una base? Se sí, essa genera una topologia con piú o meno aperti di quella euclidea? Esiste una metrica
che genera questa topologia? Quando una funzione è semicontinua superiormente?
(4.16) Esempio. Se X = R con la topologia metrica (euclidea), Y = [0, 1] ⊂ X, allora l’intervallo [0, 1/2) è
un aperto di Y (perché [0, 1/2) = (−1/2, 1/2) ∩ Y ), ma non è un aperto di X (dato che 0 non è interno a [0, 1/2)
in X, ma lo è in Y ).
(4.17) Esempio. La topologia indotta da R (con la topologia metrica standard) su Z ⊂ R è uguale alla
topologia discreta su Z. Basta osservare che i punti di Z sono tutti aperti nella topologia indotta da R in Z.
Ma non sono aperti della topologia di R!
§ 4.3.
OPZIONALE: CONTARE LE TOPOLOGIE FINITE
Sia X un insieme: ricordiamo che R una relazione (binaria) su X è una forma proposizionale su X × X,
cioè una funzione R : X × X → {0, 1} (o Vero/Falso), indicata nei due modi R( x, y) = xRy. La relazione
è riflessiva se per ogni x ∈ X si ha che xRx = 1 (è vero), e transitiva se per ogni x, y, z ∈ X si ha che
xRy = yRz = 1 =⇒ xRz = 1. Una relazione binaria riflessiva e transitiva è detta relazione di preordine
parziale.
* Cfr:
Sernesi, Vol II, Cap II §5 [1].
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
21
§ 4. SPAZI TOPOLOGICI
(4.18) Nota. Sia X un insieme finito, con una topologia A. Allora A definisce una relazione di preordine
parziale R su X (che possiamo indicare con RA ) nel modo seguente: se x, y ∈ X, si definisce
(
)
“ogni aperto U di X che contiene x contiene
xRy ⇐⇒
anche y”
che è una relazione riflessiva e transitiva (perché?).
(4.19) Nota. Se R è una relazione di preordine parziale su X, allora definiamo una topologia A su X nel modo
seguente: sia, per ogni x ∈ X, U x l’insieme definito da
U x = {y ∈ X : xRy}.
Se x1 e x2 sono due elementi di X e z ∈ U x1 ∩ U x2 , allora x1 Rz e x2 Rz, e quindi
Uz = {y ∈ X : zRy} ⊂ U x1 ∩ U x2 = {y ∈ X : x1 Ry ∧ x2 Ry},
dato che zRy ∧ x1 Rz =⇒ x1 Ry, zRy ∧ x2 Rz =⇒ x2 Ry. Inoltre x ∈ U x (perché riflessiva), e dunque gli U x
costituiscono una base per una topologia di X, la topologia associata alla relazione R.
Utilizzando (4.18) e (4.19), si può mostrare che le topologie su X sono in corrispondenza biunivoca con
le relazioni riflessive e transitive su X. Problema: come elencare tutte le relazioni riflessive e transitive su un
insieme finito X? È possibile scrivere un algoritmo che le elenca? Vediamo per X = {1, 2} si hanno le seguenti
topologie.
[
]
1 0
(i) Matrice (relazione binaria):
0 1
A = {{} , {1} , {2} , {1, 2}} ⊂ 2X
[
1 0
(ii) Matrice (relazione binaria):
1 1
]
A = {{} , {1} , {1, 2}} ⊂ 2X
[
1 1
(iii) Matrice (relazione binaria):
0 1
]
A = {{} , {2} , {1, 2}} ⊂ 2X
[
1 1
(iv) Matrice (relazione binaria):
1 1
]
A = {{} , {1, 2}} ⊂ 2X
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
22
#2. CHIUSI E TOPOLOGIE
ESERCIZI
(2.1) Dimostrare che, se A, B ⊂ X sono sottoinsiemi di uno spazio metrico:
(i) A ∪ B = A ∪ B.
(ii) A ∩ B ⊂ A ∩ B.
(2.2) Trovare i punti di accumulazione dei seguenti sottoinsiemi di R:
(i) { n1 : n ∈ N, n > 0}.
(ii) { nk : k, n ∈ N, n > 0}.
(iii) { 2kn : k, n ∈ N} (razionali diadici positivi).
(iv) { 1k +
1
n
: k, n ∈ N, k, n > 0}.
**(2.3) Quali sono i punti di accumulazione in R dell’insieme X ⊂ Q ⊂ R costituito da tutti i numeri che si
possono scrivere come somme
l
∑
1
j=1
kj
per certi interi positivi tutti distinti k j ∈ N, j = 1, . . . , l (cioè tali che i ̸= j =⇒ ki ̸= k j )? google: egyptian
fractions
*(2.4) Dimostrare che se A e B sono sottoinsiemi di uno spazio metrico X allora
(i) A ∪ B = A ∪ B;
(ii) A ⊆ A;
(iii) ( A) = A;
(iv) ∅ = ∅.
Viceversa, si consideri un operatore C : 2X → 2X con le seguenti proprietà:
(i) C A ∪ CB = C ( A ∪ B);
(ii) A ⊆ C A;
(iii) CC A = C A;
(iv) C∅ = ∅.
Dimostrare che, definendo chiusi tutti i sottoinsiemi fissati dall’operatore C (C A = A) si ottiene una topologia su X (cioè valgono gli assiomi della definizione (4.1)). Questi assiomi alternativi si chiamano assiomi di
Kuratowski ).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
23
Esercizi
1
(2.5) Quali sono i punti di accumulazione per la successione { } (per n > 0) nella retta reale R munita della
n
0
se
x
=
y
?
metrica discreta d ( x, y) =
1 altrimenti
(2.6) Dimostrare che se A ⊂ B, allora A ⊂ B.
*(2.7) Dimostrare che uno spazio topologico con più di due punti con la topologia banale non è metrizzabile,
mentre ogni spazio topologico discreto (con topologia discreta) è metrizzabile.
*(2.8) Sia X uno spazio topologico e C ⊂ X un suo sottoinsieme. Dimostrare che le seguenti proposizioni sono
equivalenti.
(i) X ∖ C è aperto.
(ii) C contiene tutti i suoi punti di accumulazione.
*(2.9) Dimostrare che la chiusura A di un sottoinsieme A ⊂ X di uno spazio topologico X è il più piccolo
sottoinsieme chiuso di X che contiene A.
(2.10) Sia X un insieme e Y ⊂ X un suo sottoinsieme. Dimostrare che se τ ⊂ 2X è una topologia per X, allora
τY = {U ∩ Y : U ∈ τ} è una topologia per Y , e che l’inclusione i : Y → X è una funzione continua.
(2.11) Sia X un insieme di tre elementi X = {a, b, c}. Le seguenti sono topologie per X:
(i) {{}, {b}, {a, b}, {b, c}, {a, b, c}}.
(ii) {{}, {a}, {a, b, c}}.
(iii) {{}, {a, b, c}}.
Le seguenti non sono topologie
(i) {{}, {a, b}, {b, c}, {a, b, c}}.
(ii) {{a}, {a, b, c}}.
Quante topologie ci sono su X in tutto? Quanti sono i sottoinsiemi di 2X ?
*(2.12) (Topologia dei complementi finiti) Sia X un insieme e τ ⊂ 2X la famiglia di tutti i sottoinsiemi A di X
con complemento finito, cioè tali che X ∖ A ha un numero finito di elementi, unita all’insieme X (si vuole che
∅ sia aperto). Si dimostri che τ è una topologia.
(2.13) Consideriamo le seguenti famiglie di sottoinsiemi della retta reale R.
(i) Tutti gli intervalli aperti: (a, b) = {x ∈ R : a < x < b}.
(ii) Tutti gli intervalli semiaperti: [a, b) = {x ∈ R : a ≤ x < b} (Sorgenfrey line).
(iii) Tutti gli intervalli del tipo: (−∞, a) = {x ∈ R : x < a}.
(iv) Tutti gli intervalli del tipo: (−∞, a] = {x ∈ R : x ≤ a}.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
24
#2. CHIUSI E TOPOLOGIE
Quali sono basi? Come sono relazionate le topologie che generano (Cioè quando le topologie sono contenute
una nell’altra)?
(2.14) Dimostrare che se f : R → R è una funzione continua, allora l’insieme {x ∈ R : f ( x ) = 0} è chiuso in
R mentre l’insieme {x ∈ R : f ( x ) > 0} è aperto in R.
*(2.15) Sia A ⊂ R un insieme e χ A la funzione (detta funzione caratteristica di A) definita da
se x ∈ A;
1
χA(x ) =
0
se x ̸∈ A;
In quali punti di R la funzione χ A è continua?
*(2.16) Quale topologia deve avere R affinché tutte le funzioni f : R → R siano continue?
*(2.17) Dimostrare che una funzione f : R → R è continua se e solo se per ogni successione convergente {xn }
(cioè per cui esiste x̄ tale che limn→∞ |xn − x̄| = 0) vale l’uguaglianza
lim | f ( xn ) − f ( x̄ )| = 0.
n→∞
(2.18) Dimostrare che un insieme finito di punti di uno spazio metrico non ha punti limite.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
Settimana N° 3
OMEOMORFISMI DI SPAZI TOPOLOGICI, TOPOLOGIA
PRODOTTO E TOPOLOGIA QUOZIENTE
§ 5.
FUNZIONI CONTINUE
(Cfr.)*
Le funzioni continue tra spazi topologici si dicono anche mappe. Si può dimostrare, esattamente come in
(3.10) e in (2.10), che vale la seguente proposizione.
(5.1) Sia f una funzione f : X → Y tra spazi topologici. Le quattro proposizioni seguenti sono equivalenti:
(i) f è continua
(ii) ∀A ⊂ X, f ( A) ⊂ f ( A).
(iii) per ogni C ⊂ Y chiuso, la sua controimmagine f −1 (C ) ⊂ X è chiuso in X.
(iv) Se B è una base per Y , allora per ogni elemento della base B ∈ B la controimmagine f −1 B è aperto in
X.
(5.2) Teorema. La composizione di funzioni continue è continua.
Dim. Sia f : X → Y una funzione continua e g: Y → Z una funzione continua. La composizione gf : X → Z
è continua se e solo se ( gf )−1 ( A) è aperto in X ogni volta che A è aperto in Z. Ora,
( gf )−1 ( A) = {x ∈ X : g( f ( x )) ∈ A}
= {x ∈ X : f ( x ) ∈ g−1 ( A)}
= f −1 ( g−1 ( A))
e dunque se A è aperto anche g−1 ( A) è aperto in Y (dato che g è continua), e poiché f è continua f −1 ( g−1 ( A))
è aperto in X.
⨳
* Cfr:
Sernesi vol II, cap I, §4 [1].
25
26
#3. OMEOMORFISMI, TOPOLOGIA PRODOTTO E TOPOLOGIA QUOZIENTE
(5.3) Teorema. Sia f : X → Y una funzione continua. Se A ⊂ X ha la topologia indotta, allora la restrizione
f | A è continua.
Dim. Sia B ⊂ Y un aperto. La controimmagine f −1 ( B) è aperta in X, dato che f è continua. La controimmagine
di B mediante la funzione ristretta f | A è data dall’insieme
{x ∈ A : f ( x ) ∈ B},
e quindi da A ∩ f −1 ( B). Per definizione di topologia indotta, questo è un aperto di A.
⨳
(5.4) Definizione. Una funzione f : X → Y tra spazi topologici è un omeomorfismo se è biunivoca e sia f che
la funzione inversa f −1 sono continue. Si dice allora che X e Y sono omeomorfi (e si indica con X ≈ Y ).
La topologia studia gli spazi a meno di omeomorfismo. Infatti, una biiezione non è altro che un “cambiamento di coordinate” in uno spazio, e l’essere omeomorfismo significa che la famiglia degli aperti viene
conservata.
(5.5) Esempio. Sia X l’insieme delle matrici 2 × 2 a coefficienti reali. Sia d la metrica munito della metrica
d ((ai j ), (bi j )) = max(|ai j − bi j |) .
ij
X è omeomorfo a R4 con la metrica euclidea
v
u
t
d (( xi ), (yi )) =
4
∑
( xi − yi )2
i=1
tramite l’omeomorfismo
(
a1,1 a1,2
a2,1 a2,2
)
a1,1
a
7→ 2,1
a1,2
a2,2
Dimostrazione: esercizio.
(5.6) Esempio. La circonferenza meno un punto è omeomorfa alla retta reale (proiezione stereografica). La
sfera meno un punto è omeomorfa al piano, analogamente. Esercizio: in coordinate.
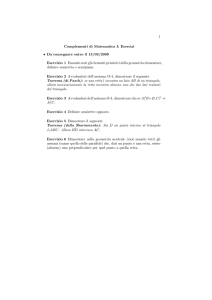
(5.7) Esempio. La retta reale è omeomorfa ad un segmento aperto: R ≈ (a, b) per ogni a < b. Definiax
mo f : (−1, 1) → R f ( x ) =
. La funzione è continua perché composizione di funzioni continue.
1 − x2
Osserviamo poi che f ( x ) = f (y) se e soltanto se
x (1 − y2 ) = y(1 − x 2 ) ⇐⇒ xy2 − x 2 y + y − x = 0
⇐⇒ xy(y − x ) + (y − x ) = 0
⇐⇒ ( xy + 1)(y − x ) = 0,
e quindi se x, y ∈ (−1, 1) e f ( x ) = f (y), allora x = y, dato che certamente xy + 1 ̸= 0 (perché?). Quindi f
è iniettiva* . Mostrare che è suriettiva equivale a mostrare che per ogni y ∈ R esiste un x ∈ (−1, 1) tale che
f ( x ) = y, cioè che l’equazione
yx 2 + x − y = 0
* La
funzione è iniettiva, anche perché è differenziabile e monotona crescente f ′ ( x ) =
x2 + 1
.
(1 − x 2 )2
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
27
§ 5. FUNZIONI CONTINUE
z, ζ
N
a
β
P
φ
S
y, η
P̂
x, ξ
Figura 3.1: Proiezione stereografica
ha una soluzione in x compresa tra −1 e 1. Se y = 0, allora è vero. Se y ̸= 0, dato che ∆ = 1 + 4y2 , delle due
soluzioni dell’equazione almeno una deve avere norma minore di 1, visto che il loro prodotto è uguale a −1,
( x − x1 )( x − x2 ) = x 2 +
Quindi f è suriettiva. Le due soluzioni sono
√
−1 + 1 + 4y2
x1 =
,
2y
x
− 1.
y
√
−1 − 1 + 4y2
x2 =
.
2y
Per ogni y > 0 si ha −x2 > 1+2y
2y > 1, e di conseguenza per ogni y < 0 x2 > 1: quindi necessariamente
x1 ∈ (−1, 1). In altre parole, la funzione inversa di f è
√
1 + 4y2 − 1
g(y) =
2y
(1 + 4y2 ) − 1
=
√
2y( 1 + 4y2 + 1)
2y
=√
,
1 + 4y2 + 1
e anch’essa è continua, dato che è composizione di funzioni continue. Per finire: omeomorfismo lineare
(a, b) ≈ (−1, 1) ≈ R.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
28
#3. OMEOMORFISMI, TOPOLOGIA PRODOTTO E TOPOLOGIA QUOZIENTE
Figura 3.2: Curva di Peano
(5.8) Esempio. La funzione f : [0, 2π ) ⊂ R → S 1 ⊂ C definita ponendo f (t ) = eit ∈ S 1 per ogni t è continua
e biunivoca. Ma non è aperta: f ([0, 1)) non è aperto in S 1 , ma [0, 1) ⊂ [0, 2π ) è aperto in [0, 2π ). Quindi non
è un omeomorfismo. Vedremo in seguito che non possono esistere omeomorfismi tra [0, 2π ) e S 1 (cioè i due
spazi non sono omeomorfi).
(5.9) Esempio. Quali tra i seguenti spazi sono omeomorfi tra di loro?
ABCDEFGHIJKLMNOPQRS
TUVWXYZ
(5.10) Esempio (Curva di Peano). Curva continua e suriettiva f : I = [0, 1] → I 2 ⊂ R2 . Figura 3.2.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
29
§ 5. FUNZIONI CONTINUE
Figura 3.3: I sette ponti di Königsberg (figura originale di Euler)
Figura 3.4: I (sette?) ponti di Kaliningrad
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
30
#3. OMEOMORFISMI, TOPOLOGIA PRODOTTO E TOPOLOGIA QUOZIENTE
(5.11) Esempio (I sette ponti di Königsberg). Il grande matematico Leonhard Euler (1707–1783) nel 1735
si trovò ad affrontare il seguente problema: trovare una passeggiata (cammino) nella città di Königsberg (o
Regiomontium il latino; ora è chiamata Kaliningrad) che attraversi una e una sola volta tutti i sette ponti (si
veda la figura 3.3). La sua soluzione (negativa) fu data nel 1736 e pubblicata nel 1741 in Solutio problematis
ad geometriam situs pertinentis (Commentarii academiae scientiarum Petropolitanae 8, 1741, pp. 128-140)* .
Si parla di questo lavoro come la nascita della topologia. Nella foto da satellite 3.4 è possibile notare che negli
anni un certo numero di ponti sono stati distrutti. È possibile ai giorni nostri risolvere in modo positivo il
problema dei ponti superstiti di Kaliningrad?
(5.12) Definizione. Una funzione f : X → Y è
(i) aperta se l’immagine f ( A) di ogni aperto A di X è aperta in Y .
(ii) chiusa se l’immagine f (C ) di ogni chiuso C di X è chiusa in Y .
(5.13) Una funzione f : X → Y è un omeomorfismo se e solo se almeno una delle due proprietà è vera:
(i) f è biunivoca, continua e aperta.
(ii) f è biunivoca, continua e chiusa.
§ 6.
TOPOLOGIA PRODOTTO
(Cfr.)†
(6.1) Definizione. Siano X e Y spazi topologici. Il prodotto cartesiano X × Y ammette una topologia, chiamata
topologia prodotto definita a partire dalla base
base = {U × V ⊂ X × Y :
U è aperto in X e
V è aperto in Y
}.
Affinché la definizione sia ben posta dobbiamo verificare che effettivamente l’insieme di aperti sopra
descritto costituisca una base per X × Y : esercizio (3.1).
Le funzione p1 : X × Y → X e p2 : X × Y → Y definite da p1 ( x, y) = x e p2 ( x, y) = y si dicono le
proiezioni.
(6.2) Se X × Y ha la topologia prodotto, allora X × Y ≈ Y × X (sono omeomorfi), e le proiezioni p1 : X × Y →
X, p2 : X × Y → Y sono continue e aperte.
Iterando il procedimento, si può definire la topologia prodotto di un insieme finito di spazi topologici
˙ n ⊂ X1 × X2 × · · · × Xn .
X1 ,X2 ,…, Xn , che ha come base la famiglia di sottoinsiemi del tipo U1 × U2 × ×U
(6.3) Proposizione. Una funzione f : X → Y1 × Y2 (che si può scrivere quindi come f ( x ) = ( f1 ( x ), f2 ( x ))) è
continua se e solo se le sue due componenti ( f1 = p1 ◦ f e f2 = p2 ◦ f ) sono continue.
* http://www.math.dartmouth.edu/{~{}}euler/pages/E053.html
† Cfr:
Sernesi, Vol II, Cap II, §6 [1].
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
§ 7. SPAZI DI IDENTIFICAZIONE E TOPOLOGIE QUOZIENTE
31
Dim. Se f è continua, allora f1 e f2 sono continue perché composizioni di f con le funzioni continue p1 e
p2 . Viceversa, se f1 e f2 sono continue, allora se V1 × V2 ⊂ Y1 × Y2 è un aperto della base per la topologia
(prodotto) di Y1 × Y2 , si ha
f −1 (V1 × V2 ) = {x ∈ X : ( f1 ( x ), f2 ( x )) ∈ V1 × V2 }
= {x ∈ X : f1 ( x ) ∈ V1 e f2 ( x ) ∈ V2 }
= f1−1 (V1 ) ∩ f2−1 (V2 ),
che è aperto perché intersezione di due aperti.
⨳
(6.4) Esempio. La topologia di Rn indotta dalla metrica euclidea (topologia metrica) è uguale alla topologia
prodotto.
(6.5) Esempio. I × I è il quadrato (pieno) di R2 . Analogamente, I n è il cubo di dimensione n.
(6.6) Esempio. Le proiezioni p1 : X × Y → X e p2 : X × Y → Y sono aperte ma possono non essere chiuse.
Per esempio, se X = Y = R,
C = {( x, y) ∈ R2 : xy = 1}
è chiuso, ma
p1 (C ) = {x ∈ R : x ̸= 0} = R ∖ {0}
non è chiuso.
(6.7) Nota. Nell’esercizio precedente C è chiuso perché, se si pone f : R2 → R definita da f ( x, y) = xy, si
ha che f è continua e
C = f −1 ({1}),
che è chiuso in R2 , dato che {1} è chiuso in R (con la topologia metrica).
(6.8) Nota. In generale non è detto che f : X → Y continua e biunivoca sia un omeomorfismo (potrebbe non
essere una mappa aperta e/o chiusa, cioè l’inversa di f potrebbe non essere continua). Per gli spazi euclidei,
però, vale il seguente teorema dimostrato da Brouwer nel 1912 (di cui non possiamo dare la dimostrazione –
Hanc marginis exiguitas non caperet).
(6.9) Teorema (Invarianza del dominio). Se X ⊂ Rn è un aperto e f : X → Rn (lo spazio Rn è inteso con la
topologia metrica) è una funzione continua e iniettiva, allora f è anche una mappa aperta.
(6.10) Corollario. Se f : Rn → Rn è continua e biunivoca, allora è un omeomorfismo.
§ 7.
SPAZI DI IDENTIFICAZIONE E TOPOLOGIE QUOZIENTE
(Cfr.)*
Abbiamo visto la definizione di funzioni continue, proprietà di composizione e restrizione di funzioni
continue. Vediamo ora come costruire spazi topologici a partire da spazi dati.
* Cfr:
Sernesi, Vol II, Cap II, §7 [1].
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
32
#3. OMEOMORFISMI, TOPOLOGIA PRODOTTO E TOPOLOGIA QUOZIENTE
Ricordiamo che una relazione su un insieme X è detta relazione di equivalenza se è riflessiva, simmetrica
e transitiva. In genere una relazione di equivalenza su X viene indicata con il simbolo “∼”. Quindi x ∼ x,
( x ∼ y ⇐⇒ y ∼ x ) e ( x ∼ y ∧ y ∼ z =⇒ x ∼ z ) Il fatto fondamentale è questo: ad una relazione di
equivalenza si associa naturalmente una partizione di X in classi di equivalenza. Cioè, per ogni x si definisce
il sottoinsieme di X
[ x ] = {y ∈ X : y ∼ x} ⊂ X,
e risulta che x ∼ y ⇐⇒ [ x ] = [y]. Le classi di equivalenza distinte sono a due a due disgiunte
[ x ] ∩ [y] ̸= ∅ =⇒ [ x ] = [y]
e X è l’unione delle sue classi di equivalenza. L’insieme di tutte le classi di equivalenza in X viene indicato
con X/∼ , ed è detto anche insieme quoziente. La funzione p : X → X/∼ che associa ad ogni x ∈ X la sua classe
di equivalnza [ x ] ∈ X/∼ è chiamata la proiezione sul quoziente. Quindi una relazione di equivalenza determina
una funzione suriettiva p : X → X/∼ sull’insieme delle classi di equivalenza.
Viceversa, data una funzione suriettiva f : X → Y , Y è in corrispondenza biunivoca con l’insieme delle
classi di equivalenza date dalla relazione
∀x, y ∈ X, x ∼ y ⇐⇒ f ( x ) = f (y).
Quindi le relazioni di equivalenza su X e le funzioni suriettive con dominio X si corrispondono.
Problema: sia ∼ una relazione di equivalenza su uno spazio topologico, e f : X → X/∼ = Y la proiezione
sull’insieme quoziente. Come dare ad X/∼ una topologia?
Le relazioni di equivalenza in un certo senso corrispondono con l’operazione di “incollamento” di punti
diversi di uno spazio topologico, cioè “identificando” tra loro punti diversi (che quando appartengono alla
stessa classe di equivalenza, saranno identificati ad un punto dell’insieme quoziente).
(7.1) Esempio.
(i) I0∼1 : incollare tra di loro gli estremi di un segmento.
(ii) R con x ∼ y ⇐⇒ x − y ∈ Z. Cos’è l’insieme quoziente? La classe di equivalenza di x ∈ R è per
definizione
= {y ∈ R : y − x ∈ Z}
= {y ∈ R : ∃k ∈ Z, y − x = k}
= {y ∈ R : ∃k ∈ Z, y = x + k}
= {x + k : k ∈ Z}
= x + Z.
Qui usiamo la notazione x + Z = {x + z : z ∈ Z}, se Z è un insieme di elementi che si possono sommare
a x.
(iii) R2 con x = ( x1 , x2 ) ∼ y = (y1 , y2 ) ⇐⇒ x − y ∈ Z2 .
(iv) Nastro di Möbius: è possibile costruirlo incollando in modo opportuno gli estremi di un nastro.
(7.2) Definizione. Se X è un insieme e A ⊂ X un sottoinsieme, si scrive X/A (quoziente di X su A) per indicare
l’insieme ottenuto identificando A ad un punto, che è l’insieme ottenuto dalla relazione di equivalenza in cui
le classi di equivalenza sono tutti i singoli punti di X ∖ A e l’intero A.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
33
§ 7. SPAZI DI IDENTIFICAZIONE E TOPOLOGIE QUOZIENTE
(7.3) Definizione. Sia F : X → Z una funzione tra insiemi, e ∼ una relazione di equivalenza su X, con proiezione sul quoziente p : X → X/∼ , p( x ) = [ x ] ∈ X/∼ . Si dice che la funzione F passa al quoziente se è possibile
definire una funzione sul quoziente f : X∼ → Z con la proprietà che per ogni x ∈ X
F ( x ) = f ( p( x )).
(7.4) Sia X come sopra un insieme con una relazione di equivalenza ∼, e F : X → Z una funzione qualsiasi.
Allora F passa al quoziente se e soltanto se è costante sulle classi di equivalenza in X.
Dim. Supponiamo che F passi al quoziente. Allora esiste f : X/∼ → Z tale che per ogni x ∈ X si ha F ( x ) =
f ([ x ]). Ma allora per ogni y ∈ [ x ] vale p(y) = [y] = [ x ], e quindi
F (y) = f ( p(y)) = f ([ x ]) = F ( x ),
cioè F è costante sulla classe di equivalenza [ x ].
Viceversa, se F è costante sulle classi di equivalenza, definiamo f : X/∼ → Z ponendo
f ([ x ]) = F ( x ).
La definizione di f è ben posta, perché se [ x ] = [y], allora F ( x ) = F (y) per ipotesi, e quindi f ([ x ]) = f ([y]).
E per ogni x si ha F ( x ) = f ( p( x )), per cui F passa al quoziente.
⨳
(7.5) Esempio. Consideriamo i due esempi I0∼1 e X = R/∼ definiti nell’esempio (7.1). Se indichiamo con
∂I = {0, 1} il bordo di I, allora 0∼1 è l’insieme ottenuto identificando ∂I ⊂ I = [0, 1] ⊂ R ad un punto, secondo
la definizione (7.2).
Osserviamo che I0∼1 e X sono in corrispondenza biunivoca. Infatti, la funzione
F: I → X
definita ponendo F (t ) = [t ] = t + Z ∈ X passa al quoziente. Per (7.4), basta verificare che F è costante sulle
classi di equivalenza in I. Ma visto che c’è una sola classe in I con più di un elemento (cioè ∂I = {0, 1}), basta
verificare che F (0) = F (1). Infatti, F (0) = Z ⊂ R, mentre F (1) = 1 + Z = Z ⊂ R.
Dimostriamo anche che la funzione indotta f : I/0∼1 → X è biunivoca. Infatti, siano [s] e [t ] due punti
distinti di I0∼1 , cioè due classi di equivalenza. Dato che sono distinti, almeno uno dei due è diverso dalla classe
∂I. Supponiamo che quindi s ∈ (0, 1). Se fosse vero che f ([s]) = f ([t ]), allora per definizione dovrebbe
essere che s + Z = t + Z, cioè esiste k ∈ Z tale che s − t = k. Osserviamo che s ∈ (0, 1) e t ∈ [0, 1], quindi
−t ∈ [−1, 0] e
s−t < 1−t ≤ 1−0 = 1
s − t > 0 − t ≥ 0 − 1 = −1,
e quindi k = s − t è un intero compreso nell’intervallo −1 < k < 1. Ma l’unico intero possibile è k = 0, e
quindi s = t contro l’ipotesi che [s] ̸= [t ]. Quindi f è iniettiva.
Verifichiamo che è suriettiva: per ogni x ∈ R esistono un intero n (la parte intera di x) e un δ ∈ R tali che
x = n + δ,
n ∈ Z,
0 ≤ δ < 1.
Quindi per ogni x ∈ R si ha che esiste δ ∈ [0, 1) tale che x − δ ∈ Z, cioè [ x ] = [δ ]. Ma questo implica che f è
suriettiva, dato che esiste t = δ per cui l’elemento [t ] ∈ I0∼1 ha immagine mediante f uguale a [ x ].
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
34
#3. OMEOMORFISMI, TOPOLOGIA PRODOTTO E TOPOLOGIA QUOZIENTE
(7.6) Definizione. Se X è uno spazio topologico e f : X → Y una funzione suriettiva, allora si definisce
la topologia quoziente su Y come la topologia i cui aperti sono tutti e soli i sottoinsiemi A ⊂ Y per cui la
controimmagine f −1 ( A) ⊂ X è aperto. Lo spazio Y si dice spazio quoziente di X rispetto alla proiezione f .
(7.7) La definizione (7.6) è ben posta: la classe di aperti descritta è in effetti una topologia su Y .
Dim. Sia f : X → Y come nella definizione (7.6).
f −1 (∅) = ∅ ⊂ X =⇒ ∅ aperto di Y .
f −1 (Y ) = X =⇒ Y aperto di Y ;
∀i, Ai ⊂ Y aperto , f −1 (∪i Ai ) = ∪i f −1 Ai
=⇒ ∪i Ai aperto di Y .
A1 , A2 ⊂ Y aperti , f
−1
( A1 ∩ A2 ) = f −1 A1 ∩ f −1 A2
=⇒ A1 ∩ A2 aperto di Y .
⨳
(7.8) Se f : X → Y è continua e suriettiva, allora la topologia di Y è contenuta nella topologia quoziente (cioè
ogni aperto di Y è aperto nella topologia quoziente di X).
Dim. Per definizione di continuità, se f : X → Y è continua e A ⊂ Y è aperto nella topologia di Y , allora
f −1 ( A) è aperto in X, e quindi per definizione di topologia quoziente è aperto nella topologia quoziente. ⨳
(7.9) Teorema. Sia X uno spazio topologico, e p : X → X/∼ = Y la proiezione sullo spazio quoziente Y . Se
una funzione F : X → Z è continua e passa al quoziente, allora la funzione indotta sul quoziente f : X/∼ → Z
è continua.
Dim. La funzione indotta f : Y = X/∼ → Z è continua se e soltanto se per ogni aperto A ⊂ Z, la controimmagine f −1 A ⊂ Y è un aperto di Y . Ma gli aperti di Y sono tutti e soli i sottoinsiemi B ⊂ Y le cui controimmagini
p−1 B sono aperti di X. Quindi f −1 A è aperto se e soltanto se p−1 f −1 A ⊂ X è aperto in X. Ma p−1 f −1 A = F −1 A,
dato che F = f ◦ p per ipotesi, e dal momento che F è continua F −1 A è un aperto di X.
⨳
(7.10) Esempio. Il toro (superficie di una ciambella)* : [0, 1] × [0, 1] con le identificazioni (i.e. relazione di
equivalenza…)
(i) (0, 0) ∼ (1, 0) ∼ (1, 1) ∼ (0, 1).
(ii) ( x, 0) ∼ ( x, 1) per 0 < x < 1.
(iii) (0, y) ∼ (1, y) per 0 < y < 1.
È omeomorfo a S 1 × S 1 ?
(7.11) Esempio. Il disco: D1 (0, R2 ) = D2 = {( x, y) ∈ R2 : x 2 + y2 ≤ 1}, quozientato rispetto alla relazione
di equivalenza:
x ∈ ∂D2 ∧ y ∈ ∂D2 (x e y stanno sul bordo)
x ∼ y ⇐⇒
x = y
altrimenti
Il quoziente risulta essere omeomorfo ad una sfera. Perché?
* Si
veda http://it.wikipedia.org/wiki/Toro_(geometria) per approfondimenti.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
35
§ 7. SPAZI DI IDENTIFICAZIONE E TOPOLOGIE QUOZIENTE
Figura 3.5: Toro, ≈ S 1 × S 1
x
−x
Figura 3.6: Identificazione antipodale dei punti sul bordo del disco
(7.12) Esempio. Il piano proiettivo* : D2 quozientato rispetto alla relazione:
se x ∈ ∂D2 ∧ y ∈ ∂D2
x = −y
x ∼ y ⇐⇒
x = y
altrimenti
Analogo: S 2 /∼ dove x ∼ y ⇐⇒ x = ±y (antipodale). Perché le due definizioni sono equivalenti? Lo vedremo
meglio più avanti.
(7.13) Esempio. Nastro di Möbius: si prenda un nastro sufficientemente lungo, e si incollino i due estremi,
dopo aver fatto fare mezzo giro al nastro. Lo spazio che risulta deve avere una faccia sola† . Cosa succede se si
taglia un nastro di Möbius esattamente a metà, lungo la sua linea mediana? Si ottengono due nastri di Möbius?
Due cilindri? Un nastro di Möbius? Un cilindro? E se il taglio inizia a 1/4 dalla linea mediana?
* Si veda http://it.wikipedia.org/wiki/Piano_proiettivo per approfondimenti. Comunque ritorneremo più avanti sul
piano proiettivo.
† Si veda http://it.wikipedia.org/wiki/Nastro_di_M%C3%B6bius e http://areeweb.polito.it/didattica/
polymath/htmlS/argoment/Matematicae/Aprile_07/AnelliMobius.htm per approfondimenti.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
36
#3. OMEOMORFISMI, TOPOLOGIA PRODOTTO E TOPOLOGIA QUOZIENTE
Figura 3.7: Il nastro di Möbius
(7.14) Esempio. La bottiglia di Klein si può ottenere come somma di due nastri di Möbius, incollati lungo i
bordi, oppure identificando opportunamente i lati opposti di un quadrato, a due a due, in modo che due siano
identificati per il medesimo verso, e due per il verso opposto* .
* Si
veda http://it.wikipedia.org/wiki/Bottiglia_di_Klein per approfondimenti.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
§ 7. SPAZI DI IDENTIFICAZIONE E TOPOLOGIE QUOZIENTE
Figura 3.8: Bottiglia di Klein: somma di due nastri di Möbius, incollati lungo i bordi
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
37
38
#3. OMEOMORFISMI, TOPOLOGIA PRODOTTO E TOPOLOGIA QUOZIENTE
ESERCIZI
(3.1) Verificare che la famiglia di sottoinsiemi U × V , con U aperto in X e V aperto in Y è una base di intorni
nello spazio prodotto (cartesiano) X × Y .
(3.2) Dimostrare che se X × Y ha la topologia prodotto e A ⊂ X, B ⊂ Y sono sottospazi, allora A × B = A × B,
e che A × B è aperto in X × Y se e solo se A è aperto in X e B è aperto in Y .
*(3.3) Dimostrare che [0, 1) × [0, 1) è omeomorfo a [0, 1] × [0, 1).
(3.4) Dimostrare che se f : X → Y è una funzione, A è un sottospazio di Y con la topologia indotta tale che
f X ⊂ A ⊂ Y , allora la funzione f : X → Y è continua se e solo se lo è la funzione f A : X → A, dove f A indica
la funzione definita da f A ( x ) = f ( x ) ∈ A ⊂ X per ogni x ∈ X.
(3.5) Dimostrare che Q = R (dove Q denota il campo dei razionali) ma che Q non ha punti interni in R.
(3.6) Dimostrare che il quadrato
{( x, y) ∈ R2 : max(|x|, |y|) = 1}
è omeomorfo alla circonferenza {( x, y) ∈ R2 : x 2 + y2 = 1}.
(3.7) Dimostrare che la mappa diagonale ∆ : X → X × X definita da x 7→ ( x, x ) è continua.
*(3.8) Dimostrare che una mappa suriettiva, continua e chiusa è una mappa quoziente.
*(3.9) È vero che la mappa di proiezione p1 : X × Y → X è sempre una mappa chiusa?
(3.10) Sia p1 : R2 = R × R → R la proiezione sulla prima coordinata. Sia
A = {( x, y) ∈ R2 : x ≥ 0 ∨ y = 0},
e f : A → R la restrizione di p1 a A. La mappa f è aperta/chiusa?
(3.11) Dimostrare che se f : X → Y è una funzione tra insiemi allora la relazione x ∼ y ⇐⇒ f ( x ) = f (y)
è una relazione di equivalenza, e la funzione f induce una funzione biunivoca tra l’insieme delle classi di
equivalenza e f ( X ) ⊂ Y .
*(3.12) Che spazio si ottiene identificando ad un punto il bordo di un nastro di Möbius?
(3.13) Classificare in modo intuitivo (a meno di omeomorfismo) i seguenti spazi:
(i) Cilindro = {( x, y, z ) ∈ R3 : x 2 + y2 = 1 ∧ z2 ≤ 1}.
(ii) Cono = {( x, y, z ) ∈ R3 : z2 = x 2 + y2 ∧ 0 ≤ z ≤ 1}.
(iii) Toro (≈ S 1 × S 1 ≈ . . . ).
(iv) Cilindro (vedi sopra) con ognuna delle due circonferenze (date da z = 1 e z = −1) di bordo identificate
ad un punto.
(v) La sfera {( x, y, z ) ∈ R3 : x 2 + y2 + z2 = 1}.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
39
Esercizi
(vi) La sfera (vedi sopra) meno un punto.
(vii) Il piano R2 .
*(3.14) Dimostrare che la somma, il prodotto e la sottrazione sono operazioni continue su R.
(3.15) Dimostrare che i seguenti insiemi sono insiemi chiusi di R2 :
(i) {( x, y) : xy = 1}.
(ii) ( x, y) : x 2 + y2 = 1}.
(iii) {( x, y) : x 2 + y2 ≤ 1}.
(iv) {( x, y) : x 3 + y3 = 1} (e in generale, {( x, y) : x n + yn = 1}).
*(3.16) Sia f : X → Y una funzione continua (mappa). Dimostrare che se esiste una funzione continua g: Y →
X (inversa destra) tale che f ◦ g è l’identità di Y , allora f è una mappa quoziente. Se g = i è l’inclusione di
un sottospazio i : Y = A ⊂ X (dove A ha la topologia indotta da X), allora il fatto che i sia inversa destra di f
si legge f ◦ i = 1Y , e cioè ∀x ∈ A, f ( x ) = x, cioè la restrizione f | A è uguale all’identità 1 A. In questo caso la
mappa f si dice retrazione.
*(3.17) Consideriamo in R la relazione di equivalenza x ∼ y ⇐⇒ x − y ∈ Q (se la differenza è razionale);
Qual è la topologia dello spazio quoziente R/∼ ? (Dimostrare che è la topologia banale.)
(3.18) Dimostrare che la composizione di mappe quoziente è una mappa quoziente.
(3.19) Dimostrare che una funzione quoziente è iniettiva se e solo se è un omeomorfismo.
*(3.20) Siano X e Y due spazi metrici con metriche d X e dY . Dimostrare che la funzione d : X × Y → R definita
da
√
d (( x1 , y1 ), ( x2 , y2 )) = d X ( x1 , x2 )2 + dY (y1 , y2 )2
è una metrica sul prodotto X × Y . Dimostrare anche che la topologia indotta da d coincide con la topologia
prodotto.
*(3.21) (Orecchini delle Hawaii) Sia X l’unione delle circonferenze {( x, y) ∈ R2 : ( x − 1n )2 + y2 = ( n1 )2 }, per
n = 1, 2, 3 . . . con la topologia indotta da R2 , e sia Y lo spazio ottenuto identificando tutti gli interi Z ⊂ R ad
un punto. Determinare (in modo intuitivo) se X e Y sono omeomorfi o meno.
(3.22) Dimostrare che le due funzioni s : R2 → R e p : R2 → R definite da
s( x, y) = x + y, p( x, y) = xy
sono continue.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
40
#3. OMEOMORFISMI, TOPOLOGIA PRODOTTO E TOPOLOGIA QUOZIENTE
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
Settimana N° 4
COMPATTEZZA
§ 8.
COMPATTEZZA
(Cfr.)*
Alcune importanti proprietà di R (dove un sottoinsieme viene detto compatto se è chiuso e limitato):
(i) L’immagine di un compatto mediante una funzione continua è compatta.
(ii) L’immagine di un intervallo chiuso e limitato mediante una funzione continua è un intervallo chiuso e
limitato (teorema del valore intermedio). (È vero anche se l’intervallo è chiuso ma non è limitato?)
(iii) Una funzione continua ammette massimo e minimo in ogni intervallo chiuso e limitato.
(iv) Ogni successione di Cauchy converge.
(v) Se A ⊂ R è compatto, allora ogni successione in A ammette una sottosuccessione convergente.
Vedremo in che modo che queste proprietà derivino da certe proprietà topologiche della retta reale. Richiamiamo gli assiomi della retta reale R (un campo ordinato con due ulteriori assiomi):
(8.1) Valgono i seguenti assiomi del campo ordinato dei numeri reali R:
(i) Assiomi di campo:
(a) ∀x, y, z ∈ R, ( x + y) + z = x + (y + z ), ( xy)z = x (yz ).
(b) ∀x, y ∈ R, x + y = y + x, xy = yx.
(c) ∃0 ∈ R : ∀x ∈ Rx + 0 = x; ∃1 ∈ R : ∀x ∈ R, x ̸= 0 =⇒ 1x = x.
(d) ∀x ∈ R, ∃ unico y ∈ R : x + y = 0. ∀x ∈ R, x ̸= 0, ∃ unico y ∈ R : xy = 1.
(e) ∀x, y, z ∈ R, x (y + z ) = xy + xz.
(ii) Assiomi di campo ordinato: la relazione > induce un ordine† totale su R in modo tale che
* Cfr:
† Una
Sernesi Vol II, Cap III, §9 [1].
relazione R su X si dice relazione d’ordine (stretto) se
41
42
#4. COMPATTEZZA
(a) x > y =⇒ x + z > y + z.
(b) x > y, z > 0 =⇒ xz > yz.
(iii) Proprietà dell’ordinamento (continuo lineare):
(a) (Completezza di Dedekind) La relazione d’ordine < ha la proprietà dell’estremo superiore (cioè
ogni insieme non vuoto superiormente limitato ha l’estremo superiore).
(b) Se x < y, allora esiste un numero z ∈ R tale che x < z < y.
(8.2) Teorema. Esiste una unica retta reale, cioè: Esiste uno e un solo campo (R) che soddisfa tutti gli assiomi
di (8.1).
Dim. In seguito, per esercizio (opzionale).
⨳
(8.3) Nota. Σημεῖόν ἐστιν, οὗ μέρος οὐέν, “un punto è ciò che non ha parti”, Γραμμὴ δὲ μῆκος ἀπλατές,
“una linea è una lunghezza senza larghezza”, Γραμμῆς δὲ πέρατα σημεῖα,e “gli estremi di una linea sono
punti”. Ma cosa è una linea retta? Εὐεῖα γραμμή ἐστιν, ἥτις ἐξ ἴσου τοῖς ἐφ' ἑαυτῆς σημείοις κεῖται, “una
linea retta è una linea che giace ugualmente rispetto ai punti su di essa”. Elementi di Euclide, pubblicato per
la prima volta intorno al III secolo BCE ad Alessandria.*
Αἰτήματα
α'. Ἠιτήσω ἀπὸ παντὸς σημείου ἐπὶ πᾶν σημεῖον εὐεῖαν γραμμὴν ἀγαγεῖν.
β'. Καὶ πεπερασμένην εὐεῖαν κατὰ τὸ συνεχὲς ἐπ' εὐείας ἐκϐαλεῖν.
γ'. Καὶ παντὶ κέντρῳ καὶ διαστήματι κύκλον γράφεσαι.
δ'. Καὶ πάσας τὰς ὀρὰς γωνίας ἴσας ἀλλήλαις εἶναι.
(a) ∀x ∈ X, ¬( xRx ) ( x ̸< x);
(b) ∀x, y ∈ X, xRy =⇒ ¬(yRx ) (x < y =⇒ y ̸< x);
(c) ∀x, y, z ∈ X, xRy ∧ yRz =⇒ xRz (x < y ∧ y < z =⇒ x < z);
L’ordine è totale se è anche tricotomico, cioè ∀x ̸= y ∈ X, allora ( x < y) ∨ (y < x ).
* La citazione in greco è presa da Euclid. Euclidis Elementa J. L. Heiberg. Leipzig. Teubner. 1883-1888. Il testo degli Elementi di
Euclide è il libro più famoso dell’antichità classica, anche perché è stato usato come libro di testo ininterrottamente dal III secolo BCE
fino ai giorni nostri. Curiosamente, fino a non molto tempo fa il testo originale (in greco) era disponibile a stampa solo con l’edizione
di Heiberg e Menge (1883-1888), con testo latino a fronte. Una versione interessante con il testo a fronte in inglese si può trovare a:
http://farside.ph.utexas.edu/euclid/Elements.pdf , basata sull’edizione di Heiberg.
Il filologo danese Heiberg aveva ricostruito il testo originale dei 13 (non 15, come si credeva anticamente) libri degli Elementi, a
partire dai manoscritti disponibili. I due principali erano il D’Orville 301, ora nella Biblioteca Bodleiana di Oxford (scritto nel 888 CE
dal copista Stefano, a Costantinopoli – consultabile on-line su http://rarebookroom.org/Control/eucmsd/index.html o nel
sito della Bodleian Library), e il Manoscritto 190 della Biblioteca Vaticana (il Vaticanus graecus 190, che risale al decimo secolo; dal
Vaticano Napoleone lo portò a Parigi nel 1810, e lo fece esaminare da F. Peyrard che ne comprese l’importanza e lo usò per pubblicare
la sua edizione in francese e latino dei primi 12 capitoli degli Elementi, così come fece successivamente Heiberg; il manoscritto fu
poi riportato a Roma nel 1815, con la restaurazionei dell’Ancien Régime, e non sembra essere consultabile on-line). L’importanza del
Vaticanus graecus 190 sta nel fatto che il copista aveva avuto a disposizione sia la copia di Teone di Alessandria (IV secolo CE, padre
della famosa Ipazia di Alessandria; purtroppo la copia di Teone aveva molto semplificato e alterato il testo di Euclide) che altre versioni
precedenti più fedeli all’originale.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 30 Μαΐου 2014
43
§ 8. COMPATTEZZA
ε'. Καὶ ἐὰν εἰς δύο εὐείας εὐεῖα ἐμπίπτουσα τὰς ἐντὸς καὶ ἐπὶ τὰ αὐτὰ μέρη γωνίας δύο ὀρῶν
ἐλάσσονας ποιῇ, ἐκϐαλλομένας τὰς δύο εὐείας ἐπ'ἄπειρον συμπίπτειν, ἐφ' ἃ μέρη εἰσὶν αἱ τῶν
δύο ὀρῶν ἐλάσσονες.
Traduzione:
Assiomi
1. Per ogni coppia di punti è possibile tracciare un segmento che ha i due punti per estremi.
2. Ogni segmento di retta si può prolungare dai due lati.
3. Dati un punto (centro) e un raggio arbitrari, è possibile tracciare la circonferenza con centro e raggio
dati.
4. Tutti gli angoli retti sono uguali tra di loro.
5. Se una linea retta che incontra altre due linee rette ha angoli interni dallo stesso lato minori di due angoli
retti, allora le due linee rette si incontreranno (prolungandole indefinitamente) dalla parte dei due angoli
citati.
Perché la nota (8.3) è stata giustapposta agli assiomi della retta reale R (8.1)? Si tratta di due espressioni
molto importanti della presentazione assiomatica della matematica. Gli Elementi di Euclide sono stati la prima
e più importante opera matematica in cui una teoria matematica è stata presentata a partire da un insieme di
postulati (o assiomi), oltre che certe nozioni comuni e schemi di deduzione (la logica). I risultati (Teoremi,
Proposizioni, Lemmi, Corollari) vengono quindi dedotti con il massimo rigore, attraverso un lungo processo
di dimostrazione delle affermazioni. È interessante però osservare che proprio l’evidenziare quali assiomi si
seguono permette poi di creare e confrontare diverse teorie, e di valutare le conseguenze delle scelte. Per esempio, i cinque assiomi di Euclide non sono gli unici, per la geometria del piano: i tredici assiomi per il piano di
Hilbert, per esempio, presentati nel Grundlagen der Geometrie, 1899, sono una alternativa più rigorosa. Anche
la retta dei numeri reali può essere presentata in modi diversi da (8.1): per esempio con la teoria delle proporzioni di Eudosso, oppure con la versione predicativa di Herman Weyl (che riteneva che la definizione stessa di
estremo superiore fosse inaccettabile nella forma attuale, e provò a ragionare su presentazioni più intuitive del
continuum), o anche con la versione costruttiva di Errett Bishop, che segue l’intuizionismo di L.E.J. Brouwer*
e la versione non costruttiva di Abraham Robinson† dei numeri reali non standard o iperreali. Non solo gli
oggetti matematici possono essere presentati con sistemi di assiomi diversi e non sempre equivalenti: anche il
modo di ragionare, cioè la logica stessa, e il linguaggio usato per comunicare sono oggetto di riflessioni. In
queste note cercheremo di non toccare mai queste quesioni delicate, ma si tenga conto che questo è un modo
di presentare questi argomenti, e non il modo.
(8.4) Definizione. Uno spazio topologico X viene detto di Hausdorff se per ogni x, y ∈ X, x ̸= y, esistono due
intorni U x e U y di x e y rispettivamente tali che
U x ∩ U y = ∅.
(8.5) Nota. Ogni spazio metrizzabile è di Hausdorff (vedi esercizio (4.4)).
* John
Myhill, What is a Real Number? Amer. Math. Monthly 79 (1972), 748-754.
A. H. Infinitesimals. Amer. Math. Monthly 79 (1972), 242–251.
† Lightstone,
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
44
#4. COMPATTEZZA
Abbiamo già accennato alla definizione di successione convergente (in spazi metrici). Definiamo ora la
convergenza di successioni in spazi topologici.
(8.6) Definizione. Si dice che una successione {xn } in X converge ad un punto x̄ ∈ X se per ogni intorno U x̄
di x̄ esiste un intero n (che dipende da U x̄ ) tale che
j ≥ n =⇒ x j ∈ U x̄ .
In tal caso si scrive
lim xn = x̄
n
e si dice che xn converge a x̄.
Se una successione in uno spazio topologico X non è altro che una funzione x : N → X, allora una
sottosuccessione è la composizione x ◦ n : N 7→ N → X di x con una funzione n : N → N monotona
(strettamente) crescente (cioè tale che k < k ′ =⇒ nk < nk ′ ).
(8.7) Se xnk è una sottosuccessione di una successione convergente xn (con limite limn xn = x̄), allora la
sottosuccessione converge al medesimo limite limk xnk = x̄.
Dim. Vedi esercizio (4.6).
⨳
(8.8) (Unicità del limite) Sia X uno spazio di Hausdorff e {xn } una successione in X. Se limn xn = x̄ e limn xn =
ȳ, allora x̄ = ȳ.
Dim. Esercizio (4.7).
⨳
(8.9) Definizione. Uno spazio topologico X si dice compatto se ogni ricoprimento aperto {Ui }i di X (cioè una
famiglia di aperti {Ui }i∈J tale che X = ∪i∈J Ui ) ha un sottoricoprimento finito, cioè esiste un sottoinsieme finito
di indici J0 ⊂ J tale che
∪
Ui
X=
i∈J0
(8.10) Nota. Uno spazio metrico si dice compatto quando lo spazio topologico associato (con la topologia
metrica) è compatto.
Se Y ⊂ X è un sottospazio di uno spazio topologico X, con la topologia indotta da quella di X, allora un
ricoprimento di Y può essere inteso come una famiglia di aperti {Ui }, con Ui ⊂ X, tali che
∪
Ui .
Y⊂
i
Le intersezioni Ui ∩ Y sono gli aperti di Y (nella topologia indotta) della definizione (8.9).
(8.11) Esempio. Sia X = {x ∈ Q : 0 ≤ x ≤ 1}. L’insieme di tutti gli aperti Vk,n della forma
Vk,n = (
k k
, ),
n+1 n
con k, n ∈ N, k ≤ n non è un ricoprimento di X. Perché? È un ricoprimento di
Y = {x ∈ Q :
2
1
≤ x ≤ }?
3
3
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
45
§ 8. COMPATTEZZA
(8.12) Esempio. L’insieme di tutti gli aperti Vn della forma Vn = (
aperto di (0, 1) ⊂ R.
(8.13) Esempio. L’insieme di intervalli aperti
{x ∈ Q :
se n ≥ 1:
Vn =
se n ≤ −1: {x ∈ Q :
√
2
√2
2
2
+
−
1 1
, ), per n ∈ N è un ricoprimento
n+2 n
√
√
√
2
2
2
<
x
<
+
}
n+1
√
√2
√n
2
2
2
|n| < x < 2 − |n|+1 , }
con n ∈ Z ∖ {0} è un ricoprimento dell’insieme X = {x ∈ Q : 0 < x < 1}.
(8.14) Esempio. Sia Vn l’insieme
√
1 √
1
Vn = {x ∈ Q : x ̸∈ [ 2 − , 2 + ]},
n
n
definito per ogni intero n ≥ 1. La famiglia {Vn } è un ricoprimento aperto di X = {x ∈ Q : 0 < x < 2}, che non
ammette sottoricoprimenti finiti.
(8.15) Se X è compatto e C ⊂ X è un sottoinsieme chiuso, allora C è compatto (con la topologia indotta).
Dim. Se {Ui }i∈J è un ricoprimento mediante aperti di C, allora, con un abuso di notazione, possiamo considerare un ricoprimento di C mediante aperti dato da {C ∩ Ui }i∈J , dove Ui sono aperti di X. Dato che C è chiuso
X ∖ C è aperto, e quindi
{X ∖ C} ∪ {Ui }i∈J
è un ricoprimento aperto di tutto X (dato che C ⊂ ∪i Ui ), e quindi esiste un sottoricoprimento finito, che sarà
della forma
{X ∖ C} ∪ {Ui }i∈J0
oppure {Ui }i∈J0 . In entrambi i casi, risulta
C⊂
∪
Ui ,
i∈J0
e quindi la tesi.
⨳
(8.16) Un sottospazio compatto di uno spazio di Hausforff è chiuso.
Dim. Sia C ⊂ X sottospazio compatto di uno spazio di Hausdorff X. Dimostriamo che C è chiuso. Sia x ∈
X ∖ C. Per ogni c ∈ C, dato che X è di Hausdorff, esistono due intorni disgiunti Uc e Vc tali che Uc ∩ Vc = ∅,
c ∈ Uc , x ∈ Vc . Ora, {Uc }c∈C è un ricoprimento di C di aperti, quindi esiste un sottoricoprimento finito, cioè
C ⊂ U c1 ∪ U c2 ∪ · · · ∪ U c N .
L’intersezione di un numero finito di aperti è aperto, quindi
V = V c1 ∩ V c2 ∩ · · · ∩ V c N
è un aperto che contiene x. Dato inoltre che per ogni i = 1 . . . N, l’intersezione Vci ∩ Uci = ∅,
V ∩ C = ∅,
cioè V ⊂ X ∖ C e quindi X ∖ C è aperto per l’arbitrarietà di x, cioè C è chiuso.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
⨳
46
#4. COMPATTEZZA
(8.17) L’immagine di un compatto mediante una funzione continua è compatta.
Dim. Sia X compatto e f : X → Y una funzione continua. Dobbiamo dimostrare che f ( X ) è compatto con la
topologia indotta da Y . Ogni ricoprimento aperto {Ui }i di f ( X ) in Y induce un ricoprimento aperto
{ f −1 (Ui )}i
di X, che ha un sottoricoprimento finito dal momento che X è compatto. La tesi segue dal fatto che per ogni i
f ( f −1 (Ui )) ⊂ Ui ,
e quindi gli {Ui } corrispondenti al sottoricoprimento finito { f −1 Ui } coprono f ( X ).
⨳
(8.18) Corollario. Se X e Y sono due spazi topologici omeomorfi, allora X è compatto se e solo se Y è
compatto.
Dim. Sia f : X → Y un omeomorfismo. Se X è compatto, allora f ( X ) = Y è compatto. Viceversa, se Y è
compatto, allora X = f −1 (Y ) è compatto dato che f −1 è continua.
⨳
(8.19) Teorema. Una funzione f : X → Y continua tra X compatto e Y Hausdorff è sempre chiusa.
Dim. Se C ⊂ X è un chiuso di X, allora per (8.15) C è compatto. Ma per (8.17) f (C ) è compatto di Y , ed un
compatto di uno spazio di Hausdorff è chiuso per (8.16), quindi f (C ) è chiuso.
⨳
(8.20) Una funzione continua, suriettiva e chiusa è una mappa quoziente
Dim. Esercizio (3.8).
⨳
(8.21) Corollario. Una funzione continua f : X → Y , biunivoca da un compatto X a un Hausdorff Y è un
omeomorfismo.
Dim. È continua, biunivoca e chiusa, dunque un omeomorfismo.
⨳
(8.22) Esempio. Mostriamo che I0∼1 (l’intervallo [0, 1] con gli estremi identificati ad un punto) è omeomorfo
alla circonferenza S 1 = {z ∈ C : |z|2 = 1}. Sia p : I → I0∼1 la proiezione sul quoziente. La funzione f : I → S 1
definita da
f (t ) = e2πit = cos 2πt + i sin 2πt = (cos 2πt, sin 2πt )
è continua se e soltanto se lo sono le sue componenti, per la proposizione (6.3) a pagina 30; ma queste lo sono
in quanto composizioni di funzioni continue* . Osserviamo il seguente diagramma:
I
p
f
/ S1
=
f¯
I0∼1
La funzione f¯ è indotta dalla funzione f sul quoziente, nel seguente modo:
f¯([ x ]) = f ( x )
* Per
poter dimostrare la continuità delle funzioni sin x, cos x occorrerebbe prima definirle: come sono definite?
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
47
§ 8. COMPATTEZZA
per ogni [ x ] ∈ I0∼1 , cioè per ogni x ∈ I. Essa è ben posta semplicemente perché f (0) = f (1). Ora, osserviamo
che f è biunivoca, dal momento che è iniettiva in (0, 1) e
f¯−1 (1) = {0, 1} = [0] ∈ I0∼1 .
Mostriamo che la funzione indotta f¯ è continua: se U ⊂ S 1 è un aperto, allora f¯−1 (U ) è aperto nella
topologia indotta se e soltanto se la sua controimmagine mediante p in I è aperto, cioè se e soltanto se p−1 f¯−1 U
è aperto in I. Ma
p−1 f¯−1 U = {x ∈ I : p( x ) ∈ f¯−1 U}
= {x ∈ I : f¯( p( x )) ∈ U
= {x ∈ I : f ( x ) ∈ U} = f −1 U ,
che è aperto dato che f è continua.
Per poter usare il Corollario (8.21) occorre mostrare che I0∼1 è compatto e che S 1 è Hausdorff. Ma I0∼1
è l’immagine di dell’intervallo I mediante la proiezione (continua) p, e quindi, visto che I ⊂ R è compatto
(lo dimostreremo direttamente, con il Teorema di Heine-Borel (9.11) a pagina 60), per la proposizione (8.17)
anch’esso è compatto. Infine, S 1 ha la topologia metrica di C ∼
= R2 , e quindi è di Hausdorff (cfr. Esercizio
(4.4) a pagina 52). Possiamo quindi usare il Corollario (8.21), e dedurre che f¯ è un omeomorfismo.
Rivedremo questo ragionamento nell’esempio (13.16).
(8.23) Nota (Opzionale). Uno spazio X è compatto se ogni famiglia di chiusi {Ci } di X con intersezione vuota
ammette una sottofamiglia finita con intersezione vuota (infatti…).
Questo consente di esprimere la compattezza nel seguente modo: diciamo che un famiglia J di chiusi di
uno spazio topologico X ha la FIP (finite intersection property) se
∩
Ci ̸= ∅
∀J0 ⊂ J, |J0 | < ∞ =⇒
i∈J0
(l’intersezione di ogni sottofamiglia finita di chiusi è non vuota). Si può dimostrare che X è compatto se e solo
se ogni famiglia di chiusi con la FIP ha intersezione non vuota (vedi esercizio (4.8)).
(8.24) Nota. Se B è una base di intorni per la topologia di X, e X è compatto, allora, in particolare, ogni
ricoprimento di X mediante intorni (che sono aperti) di B ammette un ricoprimento finito. Viceversa, se ogni
ricoprimento mediante intorni di B ammette un sotto-ricoprimento finito, allora X è compatto (cioè ogni ricoprimento di aperti ammette un sottoricoprimento finito, non solo ogni ricoprimento mediante intorni della
base). Infatti, se {Ui } è un generico ricoprimento di X, allora (visto che ogni Ui è aperto) Ui = ∪ j Bi, j dove i
Bi, j sono una famiglia di intorni della base B (ogni aperto è unione di intorni aperti della base B). Ma allora
∪
∪∪
∪
X=
Ui =
Bi, j =
Bi, j ,
i
i
j
i, j
e quindi {Bi, j }i, j è un ricoprimento di X mediante aperti della base, che ammette l’esistenza di un sottoricoprimento finito
X = Bi1 , j1 ∪ Bi2 , j2 ∪ · · · ∪ BiN , jN .
∪
Dal momento che Ui = j Bi, j , per ogni i, j si ha Bi, j ⊂ Ui , e quindi
X = U i1 ∪ U i2 ∪ · · · ∪ U i N ,
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
48
#4. COMPATTEZZA
cioè {Ui }i ammette sottoricoprimento finito. In altre parole, se H è l’insieme dei Bi, j e J l’insieme degli Ui ,
∪
allora si può definire una funzione g: H → J tale che Bh ⊂ U g(h) per ogni h ∈ H. Dato che X ⊂ h∈H0 Bh per
un certo sottoinsieme finito H0 ⊂ H, dovrà essere anche
∪
∪
Bh ⊂
Bi ,
X⊂
h∈H0
i∈g(H0 )
dove g(H0 ) ⊂ J è l’insieme finito di indici cercato.
(8.25) Teorema (Tychonoff – fin(i)to). Se X e Y sono due spazi topologici compatti, allora il prodotto cartesiano X × Y (con la topologia prodotto) è compatto.
Dim. Per la nota (8.24), è sufficiente dimostrare che ogni ricoprimento di X × Y dato da aperti della base
{U × V } (con U aperto di X e V aperto di Y ) ammette un sottoricoprimento finito. Passo 1: supponiamo che
Y sia compatto, x0 ∈ X un punto e N ⊂ X × Y un intorno di {x0 } × Y in X × Y . Allora esiste un intorno W di
x0 in X tale che N ⊃ W × Y (l’intorno W × Y è detto il tubo attorno a {x0 } × Y ). Dato che {x0 } × Y è compatto
(è omeomorfo a Y !) è possibile estrarre sottoricoprimenti finiti da tutti i ricoprimenti dati dagli elementi della
base di intorni (per la topologia prodotto) U × V (quelli che generano N con la loro unione…). A meno di
scartare qualche intorno della base, si può supporre che
U1 × V1 , . . . , Un × Vn
ricoprono {x0 } × Y . Sia W = U1 ∩ U2 ∩ · · · ∩ Un , che è un intorno aperto di x0 con la proprietà cercata:
W × Y ⊂ N.
Passo 2: Sia {Ui × Vi } un ricoprimento mediante aperti della base Ui × Vi . Dato che {x} × Y è compatto, è
contenuto in un sottoricoprimento finito, e l’unione degli aperti di tale ricoprimento per quanto visto sopra
contiene un aperto del tipo W x × Y che contiene {x} × Y . Quindi per ogni x ∈ X si può trovare un aperto
W x di X tale che W x × Y è contenuto nell’unione di un numero finito di aperti del ricoprimento. Ma dato
che X è compatto, esiste una famiglia finita di Wi che ricopre X, e quindi il prodotto cartesiano X × Y è
uguale all’unione dei tubi W xi × Y , ognuno dei quali è coperto dall’unione di un numero finito di aperti del
ricoprimento {Ui × Vi }.
⨳
§ 8.1.
SPAZI DI FUNZIONI E CONVERGENZA PUNTUALE (OPZIONALE)
Nella prossima nota introduciamo alcuni esempi di spazi di funzioni, cioè spazi costituiti da tutte le funzioni (non necessariamente continue) da un certo insieme A a un certo spazio topologico X. La topologia che
prenderemo in considerazione per questo spazio sarà quella della convergenza puntuale, cioè la topologia per
cui una successione fn di funzioni fn : A → X converge ad un limite f¯ se e solo se per ogni α ∈ A la successione
di punti di X definita da fn (α ) converge a f¯(α ). Faremo vedere in seguito nella nota (9.16) a pagina 62 che il
cubo di Hilbert (cubo di dimensione infinita, che è uno spazio di questo tipo) è compatto rispetto alla topologia
della convergenza puntuale ma non è vero che ogni successione di suoi punti ha sottosuccessioni convergenti.
(8.26) Nota. Il teorema appena visto non è il teorema di Tychonoff (Ти́хонов): il vero teorema stabilisce che
il prodotto di una famiglia qualsiasi di compatti è compatto (nella topologia prodotto); se infatti la famiglia è
infinita non si può ripetere il ragionamento sopra esposto.
La cosa importante, in generale, però è la definizione stessa di topologia prodotto per una famiglia infinita
di spazi. Per semplicità, consideriamo il prodotto di infinite copie dello stesso spazio Y , che indichiamo con Y A,
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
49
§ 8. COMPATTEZZA
con A insieme infinito. La notazione Y A è scelta per l’analogia con gli interi, dato che Y × Y = Y 2 , Y × Y × Y =
Y 3 , etc. Osserviamo che gli elementi di Y 2 sono le coppie (y1 , y2 ) con yi ∈ Y , e quindi sono le funzioni
{1, 2} → Y dall’insieme con due elementi ad Y (basta porre y1 = f (1) e y2 = f (2)). Gli elementi di Y 3 sono
le 3-uple (y1 , y2 , y3 ), cioè le funzioni {1, 2, 3} → Y ; gli elementi di Y n sono le funzioni {1, 2, 3, . . . , n} → Y .
Gli elementi di Y A sono quindi le funzioni, non necessariamente continue, A → Y (anche l’insieme delle parti
2X dell’insieme X non è altro che l’insieme di tutte le funzioni X → {0, 1} da X all’insieme con due elementi
{0, 1}). Un altro simbolo usato è
∏
YA =
Y
α∈A
(con questa notazione potremmo definire il prodotto di infiniti spazi arbitrari, non necessariamente copie dello
stesso Y ). Se x ∈ X = Y A è un elemento di X, indicheremo anche con xα = x (α ) ∈ Y l’immagine di α in Y (la
componente α-esima di x).
Per ogni insieme finito di indici α1 , α2 , . . . , αn ∈ A si possono scegliere n aperti Uα1 , Uα2 , …, Uαn di Y . La
topologia prodotto per X = Y A (detta anche topologia di Tychonoff ) è quella che ha per base tutti i sottoinsiemi
del tipo
{
}
x ∈ X : x (α ) ∈ Uα per ogni α ∈ {α1 , α2 , . . . , αn }
al variare di n ∈ N, degli indici αi e delle n-uple Uαi . Si tratta cioè degli insiemi del tipo
∏
Uα
α∈A
dove gli Uα sono tutti uguali a Y , tranne per un numero finito di indici α per cui sono aperti di Y .
Una successione xn di elementi di X converge a x̄ ∈ X se per ogni intorno U di x̄ esiste N tale che n ≥
N =⇒ xn ∈ U. Se quindi xn converge a x, in particolare per un α ∈ A arbitrario fissato accade che per ogni
aperto Uα ⊂ Y che contiene x̄ (α ) l’aperto di X
{
x ∈ X : x (α ) ∈ U α
}
è un intorno di x̄, e quindi si ha che per n abbastanza grande
{
}
xn ∈ x ∈ X : x (α ) ∈ U α
e dunque xn (α ) ∈ Uα , cioè xn (α ) converge a x̄ (α ). Cioè, se xn converge a x in Y A con la topologia prodotto,
allora per ogni α ∈ A la successione xn (α ) converge a x̄ (α ) in Y . Viceversa, supponiamo che per ogni α la
successione xn (α ) converge ad un certo x̄ (α ) ∈ Y . Questo definisce un elemento x̄ ∈ X. Mostriamo che allora
xn converge a x̄ in X con la topologia prodotto. Infatti, sia
{
}
U = x ∈ X : x (α ) ∈ Uα per ogni α ∈ {α1 , α2 , . . . , αk }
un intorno (della base) di x̄, con k ≥ 1 qualsiasi. Dato che per ipotesi xn (α1 ) converge a x̄ (α1 ), esiste N1 tale
che n ≥ N1 =⇒ xn (α1 ) ∈ Uα1 . Dato che per ipotesi xn (α2 ) converge a x̄ (α2 ), esiste N2 tale che n ≥ N2 =⇒
xn (α2 ) ∈ Uα2 . Dato che per ipotesi xn (α3 ) converge a x̄ (α3 ), esiste N3 tale che n ≥ N3 =⇒ xn (α3 ) ∈ Uα3
…Dato che per ipotesi xn (αk ) converge a x̄ (αk ), esiste Nk tale che n ≥ Nk =⇒ xn (αk ) ∈ Uαk . Ma allora esiste
certamente N (il massimo di tutti gli Ni ) per cui vale che n ≥ N =⇒ xn (αi ) ∈ Uαi per ogni i = 1, . . . , k, cioè
n ≥ N =⇒ xn ∈ U.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
50
#4. COMPATTEZZA
Possiamo quindi concludere che xn converge a x̄ in X. Per questa ragione la topologia prodotto si chiama anche
la topologia della convergenza puntuale.
È con questa topologia, che vale il teorema di Tychonoff.
Sul prodotto Y A si può definire anche un’altra topologia (che coincide con quella prodotto se A è finito):
la topologia box. Questa ha per base di aperti la famiglia di tutti i prodotti
∏
Uα
α∈A
di aperti Uα ⊂ Y , senza la restrizione di finitezza. Al variare delle famiglie di aperti {Uα } (le famiglie di aperti
di Y sono le funzioni A → 2Y che hanno per immagini degli elementi α di A gli aperti Uα ∈ 2Y ), gli insiemi
{
}
x ∈ X : x (α ) ∈ Uα per ogni α ∈ A
sono quindi una base per la topologia box. Ogni aperto nella topologia box è pertanto anche un aperto nella
topologia prodotto di Y A, ma in generale può non essere vero il viceversa.
Prendiamo infatti A = N e Y = R. Lo spazio X = RN (= Rω ) è lo spazio di tutte le successioni di
punti sulla retta reale R. Si può far vedere che la topologia prodotto è metrizzabile (cioè indotta da una certa
metrica): si veda l’esercizio (4.18). Osserviamo che se x̄ ∈ X è una successione limitata in R, allora x̄ è
contenuto nell’intorno
(8.27)
{
}
x ∈ X : xα ∈ Bϵ ( x̄α ) per ogni α ∈ A
per ϵ > 0 arbitrario, cioè l’insieme delle successioni limitate di R costituisce un aperto di X (nella topologia
box). Analogamente, se la successione x̄ ∈ X non è limitata in R, allora x̄ è contenuto nell’intorno
(8.28)
{
}
x ∈ X : xα ∈ Bϵ ( x̄α ) per ogni α ∈ A ,
per ϵ > 0 arbitrario. Allora anche il complementare dell’insieme delle successioni limitate è un aperto nella
topologia box.
D’altro canto, nella topologia prodotto, ogni intorno ha solo un numero finito di vincoli del tipo x (α ) ∈ Uα ,
per cui ogni intorno di una successione convergente x ∈ RN con la topologia prodotto contiene certamente
successioni non convergenti, e quindi l’insieme delle successioni convergenti non è un aperto di RN nella topologia della convergenza puntuale (topologia prodotto). (Non è un aperto nemmeno l’insieme delle successioni
non convergenti, e quindi l’insieme delle successioni convergenti non è nemmeno un chiuso).
Il cubo di Hilbert = [0, 1]N ⊂ RN è compatto nella topologia prodotto (per il teorema di Tychonoff),
mentre non lo è nella topologia box. Infatti, se [0, 1]N fosse compatto nella topologia box, allora lo sarebbe
anche il sottoinsieme {0, 1}N , che sarebbe un chiuso di un compatto. Infatti, se x̄ ∈ [0, 1]N è nel complementare
di {0, 1}N , cioè esiste un ᾱ ∈ N tale che x̄ᾱ ̸∈ {0, 1}, cioè 0 < x̄ᾱ < 1, allora esiste certamente ϵ > 0 per cui
Bϵ ( x̄ᾱ ) ⊂ (0, 1), e quindi l’aperto
{x ∈ [0, 1]N : ∀α, x (α ) ∈ Bϵ ( x̄α )}
è un intorno di x̄ contenuto nel complementare di {0, 1}N . In altre parole, {0, 1}N è un chiuso di [0, 1]N , e
quindi compatto per ipotesi (d’assurdo). Ma basta ora osservare che
(i) {0, 1}N ha infiniti elementi distinti (sono numerabili?).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
51
§ 8. COMPATTEZZA
(ii) Per ogni x̄ ∈ {0, 1}N , se ϵ < 1 allora
{x ∈ {0, 1}N : ∀α, x (α ) ∈ Bϵ ( x̄α )} = { x̄},
cioè x̄ ha un intorno aperto che contiene solo x̄, tra i punti di {0, 1}N . Quindi la topologia indotta dalla
topologia box su {0, 1}N è la topologia discreta.
I punti stessi di {0, 1}N costituiscono quindi un ricoprimento aperto, che non ammette sottoricoprimento finito:
non può essere compatto.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
52
#4. COMPATTEZZA
ESERCIZI
*(4.1) Sia A ⊂ R un sottoinsieme non vuoto. Un numero m ∈ R è un maggiorante se ∀a ∈ A, a ≤ m (per
definizione, un insieme limitato superiormente è un insieme con almeno un maggiorante). L’insieme di tutti i
maggioranti di A è chiuso? È limitato inferiormente (nota: l’estremo superiore sup A è il minimo dell’insieme
dei maggioranti)?
*(4.2) Dimostrare che se A ⊂ R è un sottoinsieme di R (con la metrica euclidea), allora sup A e inf A appartengono alla chiusura A.
(4.3) Sia C ⊂ [a, b] ⊂ R un sottoinsieme chiuso di [a, b] (chiuso nella topologia indotta su [a, b] da R).
Dimostrare che C è chiuso in R. Dimostrare che la stessa proprietà è falsa per gli aperti: trovare un sottoinsieme
A ⊂ [a, b] ⊂ R aperto nella topologia di [a, b] ma non in quella di R.
(4.4) Dimostrare che uno spazio X metrizzabile è di Hausdorff.
(4.5) Sia A ⊂ X un sottoinsieme di X spazio topologico. Dimostrare che x ∈ X è un punto di accumulazione
di A se e solo se
x ∈ A ∖ {x}.
(4.6) Dimostrare che ogni sottosuccessione di una successione convergente converge.
(4.7) Dimostrare l’unicità del limite di successioni in spazi di Hausdorff: Se X è uno spazio di Hausdorff e
{xn } una successione in X, allora limn xn = x̄ e limn xn = ȳ implica x̄ = ȳ.
*(4.8) Diciamo che un famiglia di chiusi di uno spazio topologico X ha la FIP (finite intersection property) se
∩
Ci ̸= ∅
∀J0 ⊂ J, |J0 | < ∞ =⇒
i∈J0
(l’intersezione di ogni sottofamiglia finita di chiusi è non vuota). Diciamo che X ha la FIP se ogni sua famiglia
di chiusi con la FIP ha intersezione non vuota:
∩
Ci ̸= ∅.
i∈J
Dimostrare che X è compatto se e solo se ha la FIP. (Suggerimento: X ∖ Ci è aperto, e quindi…).
*(4.9) Dimostrare che l’ultimo assioma della lista di assiomi di R è ridondante (si può dedurre dai primi 7).
(4.10) È vero che se un insieme X è finito allora è compatto per ogni topologia che si considera? E il viceversa
(cioè è vero che se un insieme è compatto rispetto ad ogni possibile topologia, allora ha un numero finito di
punti)?
(4.11) Si consideri la famiglia τ di tutti i sottoinsiemi di N = {1, 2, . . . } costitutita dall’insieme vuoto, da N
e da tutti i sottoinsiemi del tipo
{1}, {1, 2}, {1, 2, 3}, {1, 2, 3, 4}, {1, 2, 3, 4, 5} . . .
È vero che τ è una topologia? Se sì, allora, rispetto a questa topologia, N è compatto?
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
53
Esercizi
(4.12) Determinare se l’intervallo I = {x, ∈ R : 0 ≤ x ≤ 1} meno un punto x0 ∈ I è compatto, al variare di x0 .
(I ∖ x0 = {x ∈ I : x ̸= x0 } ).
(4.13) Si consideri il sottoinsieme di R definito da
{
}
p
100
X = x ∈ R : x = , p, q ∈ Z, |pq| ≤ 10
.
q
Determinare quali delle seguenti affermazioni è vera (nella topologia euclidea di R):
(i) X è chiuso;
(ii) X è aperto;
(iii) X è compatto.
(4.14) Sia an la successione di numeri razionali (n ≥ 1) definita come segue:
an =
p
se n = 2 p q con q dispari.
q
Se n è dispari risulta quindi an = 0 (dato che l’unico modo di scrivere un numero dispari nella forma 2 p q è
con p = 0). Quali sono i suoi punti di accumulazione, cioè i punti di accumulazione dell’insieme
X = {an : n ∈ N, n ≥ 1}?
Quali sono i punti limite di sottosuccessioni convergenti di an ?
(4.15) Sia X ⊂ R2 l’insieme definito da
X = {( x, y) ∈ R2 : y2 = x 3 − x}.
Quali delle seguenti sono vere?
(i) X è un chiuso di R2 .
(ii) La parte X ∩ {( x, y) ∈ R2 : x ≤ 0} è compatta.
(iii) L’interno di X in R2 è vuoto.
(4.16) Determinare quali dei seguenti spazi sono tra loro omeomorfi (esibendo gli omeomorfismi, altrimenti
dimostrando in modo un po’ intuitivo – non rigoroso – quando e se non ne esistono).
(i) L’intervallo chiuso [0, 1];
(ii) La circonferenza S 1 = {( x, y) ∈ R2 : x 2 + y2 = 1}.
(iii) Il quadrato: Q = {( x, y) ∈ R2 : ( x 2 − 1)(y2 − 1) = 0, x 2 ≤ 1 ≥ y2 }.
(iv) L’intervallo aperto (0, 1).
(4.17) Si consideri nello spazio R la relazione: x ∼ y ⇐⇒ sin2 x = sin2 y.
(i) È una relazione di equivalenza?
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
54
#4. COMPATTEZZA
(ii) Se sì, si dia a X = R/∼ la topologia quoziente. Lo spazio così ottenuto è compatto?
**(4.18) Sia X = [0, 1]N lo spazio di tutte le successioni di punti dell’intervallo unitario della retta reale, cioè
lo spazio definito come X = [0, 1]N l’insieme di tutte le funzioni x : N → [0, 1]. Per ogni famiglia finita di
aperti di [0, 1]
U0 , U1 , U2 , . . . , U N ⊂ [0, 1]
(con Ui ⊂ [0, 1] aperto per i = 0, 1, . . . , N) si consideri in X l’insieme
}
{
Φ(U0 , U1 , . . . , U N ) := x ∈ X : ∀i ∈ {0, 1, . . . , N}, x (i ) ∈ Ui ⊂ X.
Sia A la famiglia di tutti i possibili insiemi Φ(U0 , U1 , . . . , U N ) al variare di N ∈ N e degli Ui .
(i) Dimostrare che ∅ ∈ A e X ∈ A.
(ii) Dimostrare che A1 , A2 ∈ A =⇒ A1 ∩ A2 ∈ A.
(iii) Dimostrare che esistono A1 , A2 ∈ A tali che A1 ∪ A2 ̸∈ A.
(iv) Per ogni N ∈ N, sia AN l’insieme definito da
{
}
AN = x ∈ X : x ( N ) ∈ [0, 1/2) .
Dimostrare che AN ∈ A. Descrivere l’insieme
A=
∪
AN
N∈N
e determinare se A è una topologia per X.
(v) Dimostrare che A è una base per una topologia su X.
(vi) Si consideri la funzione d : X × X → R definita da d ( x, y) =
ben definita e che è una metrica su X.
∑
n∈N
|x (n) − y(n)|
. Dimostrare che d è
2n
(vii) Dimostrare che gli intorni sferici in X
{
}
Br (z ) = x ∈ X : d ( x, z ) < r
sono aperti di X rispetto alla topologia generata da A (suggerimento: se y ∈ Br (z ), allora esiste δ > 0
∑∞
−n
tale
(∑ che d (z,
) y) = r − δ. Esistono allora certamente N > 0 e ϵ > 0 tali che n=N+1 2 < δ/2 e
N
ϵ n=0 2−n < δ/2, da cui, con la disuguaglianza triangolare, possiamo costruire un elemento della
base A contentente y tale che ... ).
(viii) Fissati U0 , U1 , . . . , U N aperti di [0, 1], sia y ∈ X tale che y(n) ∈ Un per ogni n = 0, . . . , N. Mostrare che
esiste ϵ > 0 tale che per ogni n = 0, . . . , N si ha per t ∈ [0, 1]
|t − y(n)| < 2n ϵ =⇒ t ∈ Un .
Dedurre che l’intorno sferico in X con centro in y e raggio ϵ è contenuto nell’aperto
{
}
Φ(U0 , U1 , . . . , U N ) = x ∈ X : ∀n ∈ {0, 1, . . . , N}, x (n) ∈ Un ⊂ X.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
55
Esercizi
(suggerimento si osservi che se an ≥ 0 sono termini positivi o nulli allora
∞
∑
an
n=0
2n
< ϵ =⇒ ∀N, aN < 2N ϵ
). Dedurre che X ha la topologia metrica indotta da d.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
56
#4. COMPATTEZZA
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
Settimana N° 5
COMPATTEZZA NEGLI SPAZI EUCLIDEI
§ 9.
COMPATTEZZA IN SPAZI METRICI ED EUCLIDEI
(Cfr.)*
(9.1) Teorema. Sia X uno spazio metrico e C ⊂ X un sottoinsieme, con la topologia indotta† . Le seguenti
proposizioni sono equivalenti:
(i) C è compatto (Heine-Borel).
(ii) Ogni insieme infinito di punti di C ha un punto di accumulazione in C (Bolzano-Weierstrass).
(iii) Ogni successione in C ammette una sottosuccessione che converge in C (i.e. C è compatto per successioni).
Dim. Cominciamo a dimostrare che (i ) =⇒ (ii ), cioè che ¬(ii ) =⇒ ¬(i ). Se è vero ¬(ii ), esiste un
insieme infinito A ⊂ C di punti di C che non ha nessun punto di accumulazione in C (cioè nessun punto di C è
di accumulazione per A, e quindi in particolare nessun punto di A è di accumulazione per A). Questo significa
che ogni a ∈ A non è di accumulazione, e quindi per ogni a ∈ A esiste un intorno aperto Ua di a tale che Ua ∩ A
non contiene altri punti oltre ad a, cioè
Ua ∩ A = {a}
(9.2)
Si consideri ora il ricoprimento aperto di A:
A⊂
∪
Ua .
a∈A
Per la (9.2), il ricoprimento {Ua } di A non ammette nessun sottoricoprimento, e dato che se A è infinito anche
il ricoprimento è infinito, risulta che A non è compatto. Per mostrare che C non è compatto, basta osservare
che A è chiuso in C (dal momento che nessun punto di C è di accumulazione per A, la chiusura di A in C è
uguale a A): se C fosse compatto anche A dovrebbe essere compatto, per (8.15). Quindi C non è compatto.
* Cfr:
Sernesi Vol II, Cap III, §9 [1].
sia C uno spazio metrico, quindi.
† Equivalentemente:
57
58
#5. COMPATTEZZA NEGLI SPAZI EUCLIDEI
Ora mostriamo che (ii ) =⇒ (iii ). Sia {xi }i∈J una successione di punti di C e A ⊂ C l’insieme dei punti
di {xi }i∈J . Se A è un insieme finito, allora c’è (in modo banale) una sottosuccessione {xi }i∈J0 con J0 ⊂ J che
converge in C: basta prendere una successione costante. Altrimenti, A è un insieme infinito, e dunque per (ii )
esiste un punto x̄ ∈ C che è di accumulazione per A. Per definizione, questo vuol dire che per ogni ϵ > 0
l’intersezione
Bϵ ( x̄ ) ∩ ( A ∖ { x̄}) ̸= ∅.
Cioè, per ogni ϵ > 0 esiste y ∈ A, y ̸= x̄ per cui
y ∈ Bϵ ( x̄ )
(ricordiamo anche che y ∈ A ⇐⇒ y = xn per qualche n). Dato che X è uno spazio metrico, segue che
per ogni ϵ > 0 Bϵ ( x̄ ) ∩ A ha infiniti punti (vedi anche esercizio (5.2)). Ora, definiamo la successione {nk }
per induzione: si scelga y ∈ B1 ( x̄ ) ∩ A. Allora esiste n1 tale che xn1 = y. Supponiamo di aver definito nk .
1
Definiamo ϵ k+1 =
, ed allora esistono infinite scelte per y ∈ Bϵk+1 ( x̄ ) ∩ A, dunque infinite soluzioni
k+1
(intere) dell’equazione
xn ∈ Bϵk+1 ( x̄ ).
Dato che sono infinite, ne esiste una per n > nk , che chiamiamo nk+1 . È facile vedere che la sottosuccessione
{xnk } converge a x̄ ∈ C.
Infine mostriamo che (iii ) =⇒ (i ). Questa è la parte più difficile della dimostrazione. Per prima cosa,
supponiamo di avere un ricoprimento {Uα } di C costituito esclusivamente da intorni circolari Uα = Brα (cα ) e
mostriamo che
(9.3) esiste δ > 0 per cui per ogni x ∈ C l’intorno Bδ ( x ) è contenuto in qualche Uα .
Dimostrazione del lemma (9.3). Dobbiamo mostrare che per ogni x ∈ C esiste Uα = Brα (cα ) tale che Bδ ( x ) ⊂
Brα (cα ). Se ciò non fosse vero, dovrebbe essere vero che per ogni δ > 0 esiste x = x (δ ) ∈ C tale che per ogni
α Bδ ( x ) ̸⊂ Bα . Consideriamo la successione δn = n1 . Allora, per ogni n ≥ 1 si può definire un elemento xn ∈ C
per cui
(9.4)
∀α, Bδn ( xn ) ̸⊂ Uα .
Di nuovo, consideriamo che per ipotesi (iii ) è vera, e quindi la successione {xn } ammette una sottosuccessione
{xnk } che converge ad un certo y ∈ C. Dal momento che C è ricoperto dagli aperti Ui , esiste un aperto Uαy del
ricoprimento che contiene y, cioè tale che
lim xnk = y ∈ Uαy .
k
Ma per ipotesi Uαy è aperto, quindi esiste un raggio r > 0 tale che Br (y) ⊂ Uαy , e se k è grande abbastanza si
ha che xnk ∈ Br/2 (y) (dalla convergenza della sottosuccessione) e quindi per la disuguaglianza triangolare che
Br/2 ( xnk ) ⊂ Br (y) ⊂ Uαy .
Dato che per k abbastanza grande δnk < 2r , si può trovare un k per cui
Bδnk ( xnk ) ⊂ Br (y) ⊂ Uαy .
Ma questo contraddice la definizione degli {xn } (equazione (9.4)), per cui l’ipotesi è falsa. Abbiamo mostrato
che esiste δ > 0 per cui per ogni x ∈ C l’intorno Bδ ( x ) è contenuto in qualche Ui del ricoprimento aperto. ⨳
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
59
§ 9. COMPATTEZZA IN SPAZI METRICI ED EUCLIDEI
Ora, mostriamo che
(9.5) per ogni ϵ > 0 l’insieme C può essere ricoperto da un numero finito di intorni circolari di raggio ϵ .*
Dimostrazione del lemma (9.5). Se ciò non fosse vero, per un certo ϵ > 0, si scelga x1 ∈ C; dato che Bϵ ( x1 )
non può ricoprire C (per ipotesi), esiste x2 ∈ C tale che x2 ̸∈ Bϵ ( x1 ). Analogamente, si scelga x3 ∈ C ∖
( Bϵ ( x1 ) ∪ Bϵ ( x2 )), e per induzione
n
∪
xn+1 ∈ C ∖ Bϵ ( xi ) .
i=1
La successione (di infiniti punti distinti) esiste perché
n
∪
Bϵ ( xi )
i=1
non può mai coprire C. Inoltre, se h ̸= k si ha
d ( xh , xk ) ≥ ϵ ,
e quindi la successione {xi }i non può avere sottosuccessioni convergenti. Ma dato che stiamo assumendo (iii )
vera, ogni successione in C deve avere almeno una sottosuccessione convergente, e questa proprità è contraddetta dall’esistenza della successione {xi }. Quindi l’ipotesi era falsa, e per ogni ϵ > 0 l’insieme C è ricoperto
da un numero finito di intorni circolari di raggio ϵ .
⨳
Sia quindi C ricoperto da un numero finito di intorni circolari Bϵ (c j ) di raggio ϵ e {Uα } il ricoprimento
di C di intorni circolari definito sopra, con ϵ < δ. Dato che ϵ < δ, per ogni intorno Bϵ (c j ) (nell’insieme
finito di intorni che ricopre C) esiste un intorno Uα = Uα( j ) tale che Bϵ (c j ) ⊂ Uα( j ) . L’insieme finito di
intorni {Uα( j ) } j ricopre C, dato che Bϵ (c j ) ricopre C, ed è quindi un sottoricoprimento finito di {Uα }. Per
concludere la dimostrazione, bisogna trovare sottoricoprimenti finiti per ricoprimenti aperti generici, e non
⨳
solo per ricoprimenti di intorni della base di intorni circolari. Ma questo segue da (8.24).
(9.6) Nota. Osserviamo che abbiamo di fatto dimostrato il seguente lemma (chiamato lemma del numero di
Lebesgue):
(9.7) Sia X uno spazio metrico compatto, e {Uα } un ricoprimento aperto di X. Allora esiste δ > 0 (chiamato
numero di Lebesgue del ricoprimento {Uα }) tale che per ogni x ∈ X esiste α tale che x ∈ Bδ ( x ) ⊂ Uα .
Dim. Se Uα è composto da intorni sferici (palle), allora si tratta esattamente di (9.3). Altrimenti, gli Uα sono
unioni di intorni circolari perché aperti, e quindi possiamo sostituire ad ogni Uα = ∪i Bα,i l’insieme di Bα,i
di cui è unione, ed ottenere un ricoprimento per cui vale (9.3). Quindi per ogni x ∈ X esiste α, i tale che
x ∈ Bδ ( x ) ⊂ Bα,i , e quindi esiste α tale che x ∈ Bδ ( x ) ⊂ Uα , dato che Bα,i ⊂ Uα .
⨳
(9.8) Nota. Se X non è uno spazio metrico (o metrizzabile), le tre proprietà non sono necessariamente equivalenti. Ci sono esempi di spazi per cui vale (i ) ma non vale (iii ) (nella nota (9.16) a pagina 62: si dice che
è compatto ma non compatto per successioni). Ma ci sono anche spazi per cui vale (iii ) ma non (i ) (cioè
X = ω1 è compatto per successioni ma non lo è per ricoprimenti; ω1 è semplicemente un certo insieme con
* La
proprietà che per ogni ϵ > 0 l’insieme C può essere ricoperto da un numero finito di intorni sferici di raggio ϵ ha un nome: si
dice che C è totalmente limitato. È chiaro che se C è totalmente limitato, allora è limitato. Purtroppo in generale non è vero il viceversa.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
60
#5. COMPATTEZZA NEGLI SPAZI EUCLIDEI
la topologia degli intervalli, rispetto ad un ordine totale, che però non riusciamo a definire in questo corso;
un esempio –opzionale– si può trovare nella nota (9.17) a pagina 63). In generale, però vale (i ) =⇒ (ii )
(guardare la dimostrazione…), e (iii ) =⇒ (ii ).
(9.9) Nota. L’intervallo [0, 1] di Q non è compatto. Per (9.1), basta trovare una successione in [0, 1] che converge a un numero irrazionale. Un esempio è quello delle troncate n-esime delle cifre decimali di un irrazionale
di [0, 1]. Esempi costruttivi di successioni di questo tipo sono molto interessanti: una cosa è dire che esiste una
successione di razionali che converge a q, un’altra cosa è definire una funzione
√ (ricorsiva, per esempio) o un
algoritmo che genera tali razionali. In altre parole, fissato per esempio q = 2/2 dovrebbe essere possibile
scrivere un programma che per k assegnato calcola in modo esatto tutte le prime k cifre decimali di q. È
possibile in questo modo scrivere un programma che calcola in modo esatto tutte le prime k cifre decimali
anche di π? È vero che per ogni x ∈ R esiste un programma che per k assegnato calcola in modo esatto tutte
le prime k cifre decimali di x (di qualsiasi irrazionale)? Stiamo parlando naturalmente di programmi in senso
astratto. Nei casi concreti, programmi che impiegano 10100 anni per terminare non sono di grande utilità (si
veda più avanti anche (11.18) a pagina 78).
A Spigot Algorithm* for the Digits of π
import sys
def main():
k, a, b, a1, b1 = 2L, 4L, 1L, 12L, 4L
while 1:
p, q, k = k*k, 2L*k+1L, k+1L
a, b, a1, b1 = a1, b1, p*a+q*a1, p*b+q*b1
d, d1 = a/b, a1/b1
while d == d1:
output(d)
a, a1 = 10L*(a%b), 10L*(a1%b1)
d, d1 = a/b, a1/b1
def output(d):
sys.stdout.write(str(d))
sys.stdout.flush()
if __name__ == "__main__":
main()
(9.10) Sia X uno spazio metrico e C ⊂ X un sottoinsieme. Se C è compatto, allora C è chiuso e limitato.
Dim. Ogni spazio metrico è di Hausdorff (vedi esercizio (4.4)), e ogni compatto di uno spazio di Hausdorff è
chiuso (vedi (8.16)), per cui se C è compatto di X allora C è chiuso. Dobbiamo quindi mostrare che C è limitato.
Sia x0 un punto di X e Bn ( x0 ) la successione crescente di intorni circolari di raggio n ∈ N. Dato che {Bn ( x0 )}n
è un ricoprimento aperto di C, deve ammettere un sottoricoprimento finito, cioè deve esistere n0 ∈ N per cui
C ⊂ Bn0 ( x0 ), cioè C è limitato.
⨳
(9.11) Teorema (Heine-Borel). L’intervallo unitario [0, 1] ⊂ R è compatto.
Prima dimostrazione. Sia {Ui }i∈J un ricoprimento di [0, 1] e definiamo
{
F = t ∈ I : [0, t ] è coperto da una famiglia finita
}
di aperti di {Ui }i∈J }
*A
Spigot Algorithm for the Digits of π, S. Rabinowitz, S. Wagon (The American Mathematical Monthly, Vol. 102, No. 3 (Mar.,
1995), pp. 195-203 ).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
61
§ 9. COMPATTEZZA IN SPAZI METRICI ED EUCLIDEI
Si vede che 0 ∈ F (e quindi F non è vuoto) e che t ∈ F, 0 ≤ s < t =⇒ s ∈ F. Si consideri m = sup F
(l’estremo superiore di F, che esiste per gli assiomi (8.1)). Allora t < m =⇒ t ∈ F e t > m =⇒ t ̸∈ F.
Vediamo se m ∈ F oppure no. Dato che m ∈ [0, 1] e {Ui } ricopre [0, 1], esiste im ∈ J per cui m ∈ Uim . Ma Uim è
aperto, e dunque esiste un intorno circolare di raggio ϵ tale che Bϵ (m) ⊂ Uim . Visto che m − ϵ ∈ F, l’intervallo
[0, m − ϵ ] è ricoperto da un numero finito di aperti Ui , che uniti ad Uim costituiscono un numero finito di aperti
che copre [0, m], e dunque m ∈ F, cioè
F = [0, m].
Ora, se m < 1, allora un ricoprimento finito di [0, m] sarebbe anche ricoprimento finito di [0, m + ϵ ] per un
certo ϵ abbastanza piccolo, per cui deve essere m = 1, cioè F = [0, 1] (in altre parole, abbiamo trovato il
ricoprimento finito di [0, 1]).
⨳
Seconda dimostrazione. Sia {Ui }i∈J un ricoprimento aperto di I0 = [0, 1]. Supponiamo per assurdo che non
1
ammetta sottoricoprimenti finiti. Dividiamo I0 nelle due metà di lunghezza :
2
1
1
[0, 1] = [0, ] ∪ [ , 1].
2
2
Se entrambe le metà fossero ricoperte da un numero finito di Ui , cadremmo in contraddizione, per cui almeno
una delle due non lo è, e la chiamiamo I1 . Dividendo I1 in due metà, possiamo di nuovo applicare lo stesso
argomento per definire I2 , e così via una successione In di intervalli chiusi non ricopribili da un numero finito
di aperti Ui , di lunghezza 2−n , e con la proprietà In ⊂ In−1 per ogni n ≥ 1.
I0 ⊇ I1 ⊇ I2 ⊇ · · · ⊇ In ⊇ . . . .
Ora, se definiamo
I∞ =
∞
∩
In ,
i=0
osserviamo che I∞ non può avere più di un punto (infatti, x, y ∈ I∞ =⇒ ∀n ≥ 0, x, y ∈ In =⇒ ∀n ≥
0, |x − y| ≤ 2−n , che implica |x − y| = 0). Come conseguenza dell’esistenza dell’estremo superiore in R, si può
mostrare (vedi esercizio (5.3)) che I∞ non è vuoto, e che
I∞ = {inf (max In ) = sup(min In )}.
Sia p ∈ I∞ . Dato che p ∈ I, esiste i p ∈ J per cui p ∈ Ui p , e quindi esiste un ϵ > 0 tale che
Bϵ ( p) ⊂ Ui p .
Ma se n è abbastanza grande, In ⊂ Bϵ ( p), e dunque esiste un n per cui
In ⊂ Bϵ ( p) ⊂ Ui p :
ciò contraddice l’ipotesi che ogni In non si può coprire con un insieme finito di Ui (un solo Ui p è sufficiente!).
⨳
La seconda dimostrazione (bisezione) può essere modificata in questo modo, dato che grazie al Teorema
(9.1) basta mostrare che ogni sottoinsieme infinito A di [0, 1] ha un punto di accumulazione in [0, 1]: in I0 =
[0, 1] ci sono infiniti punti di A, e quindi in una delle due metà [0, 1/2], [1/2, 1] ce ne devono essere infiniti. E
così per induzione, si ottiene una catena I0 ⊃ I1 ⊃ . . . ⊃ In ⊃ . . . di intervalli di ampiezza 2−n che converge al
punto di accumulazione di A (esercizio!).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
62
#5. COMPATTEZZA NEGLI SPAZI EUCLIDEI
(9.12) Corollario. Per ogni a<b ∈ R, l’intervallo [a, b] è compatto.
Dim. Dato che l’intervallo [a, b] è omeomorfo all’intervallo [0, 1], segue immediatamente da (9.11).
⨳
(9.13) Teorema (Heine-Borel II). Se X = Rn con la metrica euclidea, allora C ⊂ X è compatto se e solo se
chiuso e limitato.
Dim. La proposizione (9.10) è la parte “solo se”. Viceversa, se C ⊂ Rn è limitato, allora è contenuto nel
parallelepipedo del tipo
C ⊂ [a, b]n ⊂ Rn ,
che è compatto per il corollario (9.12) unito al teorema (8.25). Quindi, se C è chiuso in X, è chiuso anche
in [a, b]n e quindi è un sottoinsieme chiuso di uno spazio compatto, e quindi è compatto per la proposizione
(8.15).
⨳
(9.14) Corollario (Bolzano-Weierstrass). Ogni insieme infinito e limitato in Rn ha almeno un punto di accumulazione.
Dim. Un insieme infinito e limitato in Rn è anche, come sopra, un sottoinsieme infinito del compatto [a, b]n
per qualche a, b. Per (9.1), (ii ), esiste quindi un punto di accumulazione.
⨳
(9.15) Teorema. Una funzione continua f : X → R definita su un dominio compatto X ha massimo e minimo.
Dim. Dato che X è compatto, f ( X ) è compatto e quindi chiuso e limitato in R. Dato che è limitato, sia l’estremo superiore M = sup( f ( X )) che l’estremo inferiore m = inf ( f ( X )) esistono finiti. Gli estremi m e M
appartengono alla chiusura f ( X ) (vedi esercizio (4.2)), che coincide con f ( X ) dato che f ( X ) è chiuso, quindi
m ∈ f ( X ), M ∈ f ( X ), e quindi sia m che M sono assunti in X, cioè m = min x∈X f ( x ), M = max x∈X f ( x ). ⨳
(9.16) Nota (Opzionale). Consideriamo, come nella nota (8.26) a pagina 48, la topologia prodotto di una
famiglia qualsiasi di spazi. Per esempio, l’insieme delle parti X = 2[0,1] dell’intervallo [0, 1], che possiamo
identificare con l’insieme di tutte le funzioni f : [0, 1] → {0, 1}. Nella topologia (prodotto) di X una successione
{ fn } converge a f¯ se e soltanto se per ogni α ∈ [0, 1] fn (α ) converge a f¯(α ). Con la topologia prodotto e il
teorema di Tychonoff, dato che {0, 1} è compatto, allora anche X è compatto. Ora costruiamo una successione
fn in X che non converge puntualmente, e per cui nessuna sottosuccessione converge puntualmente. Per ogni
t ∈ [0, 1] sia
t = a0 , a1 a2 a3 . . . an . . .
la rappresentazione in cifre binarie di t, cioè
t=
∞
∑
a j 2− j .
j=0
Poniamo
f n ( t ) = an ,
cioè fn (t ) è uguale all’n-esima cifra nella rappresentazione binaria di t. Ora, se fnk è una sottosuccessione
qualsiasi, sia α ∈ [0, 1] un numero qualsiasi le cui cifre binarie α = a0 , a1 a2 . . . soddisfano
ank = k
mod 2.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
§ 9. COMPATTEZZA IN SPAZI METRICI ED EUCLIDEI
63
Allora fnk (α ) = k mod 2, e la sottosuccessione fnk non converge puntualmente. Quindi X è compatto, ma
non è vero che ogni successione in X ammette almeno una sottosuccessione convergente. Segue qundi dal
Teorema (9.1) che sullo spazio X di tutte le funzioni [0, 1] → {0, 1} non è possibile definire una metrica che
induca la topologia della convergenza puntuale (non è metrizzabile nella topologia prodotto/della convergenza
puntuale).
Consideriamo ora in X l’insieme D ⊂ X delle funzioni f : [0, 1] → {0, 1} che sono uguali a 1 solo in un
numero finito di punti di [0, 1]. Sia x ∈ X un punto arbitrario di X; se U ⊂ X è un aperto della base della
topologia prodotto di X, allora esistono k punti α1 , . . . , αk ∈ [0, 1] e k valori y1 , . . . , yk ∈ {0, 1} tali che
U = { f ∈ X : ∀i = 1 . . . k, f (αi ) = yi },
e quindi gli intorni U di x ∈ X sono gli insiemi di funzioni f : [0, 1] → {0, 1} che coincidono con x su
un insieme finito di punti α1 , . . . , αk . In ogni intorno quindi cadono sempre punti di D oltre ad x, cioè ogni
x è di accumulazione per D (D è denso in X). Però le successioni di punti in D non possono convergere
(puntualmente!) che a funzioni x : [0, 1] → {0, 1} che sono uguali a 1 al massimo in un insieme numerabile di
punti. Quindi ci sono punti di accumulazione per D che non sono limiti di successioni di punti in D.
(9.17) Nota (Opzionale). Modifichiamo l’esempio della nota (9.16), per ottenere uno spazio che è compatto
per successioni ma non compatto. Sia {0, 1}I l’insieme di tutte le funzioni (non necessariamente continue)
I → {0, 1}, dove I = [0, 1] ⊂ R ha la topologia metrica e {0, 1}I ha la topologia della convergenza puntuale
(cioè quella prodotto di una infinità non numerabile (I) di copie di {0, 1}, analogamente alla nota precedente).
Per ogni f : I → {0, 1}, il supporto di f è definito da
S ( f ) = {t ∈ [0, 1] : f (t ) = 1}.
Sia ora X ⊂ {0, 1}I il sottospazio definito da
{
}
X = f ∈ {0, 1}I : S ( f ) è numerabile. ⊂ {0, 1}I ,
con la topologia indotta.
(9.18) Per ogni successione { fn } di elementi di X esiste una sottosuccessione fnk convergente in X: X è
compatto per successioni.
Dim. L’unione di tutti i supporti delle fn è unione numerabile di insiemi numerabili, e quindi anch’esso è
numerabile:
S = ∪n S ( fn ) ≈ N.
Ora, le funzioni fn |S, le restrizioni delle fn all’unione dei supporti S, costituiscono una successione in I S (lo
spazio di tutte le funzioni da S a {0, 1}). Ma si può mostrare che {0, 1}S ≈ {0, 1}N è metrico (è l’insieme di
Cantor dell’esercizio (6.22) a pagina 90) e compatto (nella topologia prodotto, per il teorema di Tychonoff o
per l’esercizio (6.22)), e quindi esiste una sottosuccessione fnk |S che converge in I S , cioè una sottosuccessione
per cui per ogni t ∈ S si ha che fnk (t ) converge. Ma se t ̸∈ S, fnk = 0 per definizione, e quindi fnk (t ) converge
per ogni t ∈ I, e dunque converge ad una funzione f¯. Il supporto di f¯ è per forza numerabile (contenuto in S),
e quindi f¯ ∈ X, dunque X è compatto per successioni.
⨳
D’altra parte vale il seguente lemma.
(9.19) X non è compatto (per ricoprimenti).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
64
#5. COMPATTEZZA NEGLI SPAZI EUCLIDEI
Dim. Per ogni t ∈ I, l’insieme
{
}
At = f ∈ X : f (t ) = 0
è un aperto di X (è un elemento della base di aperti nella topologia prodotto di {0, 1}I ∩ X). Per ogni f ∈ X
esiste certamente t ∈ I tale che f (t ) = 0, perché altrimenti il supporto S ( f ) sarebbe non numerabile. Quindi
X ⊂ ∪t∈[0,1] At
è un ricoprimento aperto. Ma X non può essere coperto da un numero finito di At : per ogni insieme finito
t1 , . . . , tn esiste certamente f ∈ X tale che
f (t1 ) = 1, . . . , f (tn ) = 1,
cioè f ̸∈ Ati per i = 1, . . . , n. Quindi X non è compatto.
§ 10.
⨳
SPAZI METRICI COMPLETI
(10.1) Definizione. Una successione {xn }n in uno spazio metrico si dice di Cauchy se per ogni ϵ > 0 esiste un
intero N = N (ϵ ) per cui
n, m > N =⇒ d ( xn , xm ) < ϵ .
(10.2) Una successione convergente in uno spazio metrico è di Cauchy.
Dim. Se limn xn = x̄, allora per ogni ϵ > 0 esiste n0 > 0 tale che n > n0 =⇒ d ( x̄, xn ) < ϵ. Quindi se
n, m > n0 si ha (per la disuguaglianza triangolare)
d ( xn , xm ) ≤ d ( xn , x̄ ) + d ( x̄, xm ) < 2ϵ ,
e quindi la successione è di Cauchy.
⨳
(10.3) Ogni successione di Cauchy è limitata.
Dim. Per definizione, esiste N ≥ 1 tale che m, n ≥ N =⇒ d ( xn , xm ) < 1. Ma allora in particolare per ogni
n ≥ N d ( xn , xN ) < 1 e quindi per ogni n ≥ 1
d ( xn , x1 ) ≤ M = max{d ( x1 , x2 ), d ( x1 , x3 ), . . . , d ( x1 , xN )} + 1,
e dunque {xn } ⊂ BM ( x1 ) è limitata.
⨳
(10.4) Definizione. Uno spazio metrico X si dice completo se ogni successione di Cauchy in X converge in X.
(10.5) Uno spazio metrico X è completo se e solo se ogni successione di Cauchy in X ammette una sottosuccessione convergente.
Dim. È ovvio che se è completo allora ogni successione di Cauchy converge, e dunque basta prendere la
successione stessa {xn }. Supponiamo invece che ogni successione di Cauchy ammetta una sottosuccessione
convergente. Sia {xn } una successione di Cauchy e {xnk } la sottosuccessione convergente a x̄ ∈ X. Per ogni
ϵ > 0 esiste N tale che
m, n > N =⇒ d ( xn , xm ) < ϵ /2,
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
65
§ 10. SPAZI METRICI COMPLETI
ed un K tale che k > K =⇒ nk > N e
d ( xnk , x̄ ) < ϵ /2.
Ma allora se n > N si ha per ogni k > K
d ( xn , x̄ ) ≤ d ( xn , xnk ) + d ( xnk , x̄ ) < ϵ ,
cioè {xn } converge a x̄.
⨳
(10.6) Corollario. Se X è uno spazio metrico compatto, allora X è completo.
Dim. Per (9.1), ogni successione in X ammette una sottosuccessione convergente. In particolare, quindi, ogni
successione di Cauchy in X ammette una sottosuccessione convergente. Ma allora per (10.5) lo spazio metrico
X è completo.
⨳
(10.7) Siano X e Y due spazi metrici con metriche d X e dY . Allora X × Y è uno spazio metrico con la metrica
prodotto definita da
√
d (( x1 , y1 ), ( x2 , y2 )) =
d X ( x1 , x2 )2 + dY (y1 , y2 )2
Dim. Esercizio (3.20).
⨳
(10.8) Se X e Y sono spazi metrici completi, allora X × Y con la metrica prodotto è uno spazio metrico
completo.
Dim. Esercizio (-1.1).
⨳
(10.9) Un sottospazio S ⊂ X di uno spazio metrico completo è completo se e solo se è chiuso in X.
Dim. Esercizio (-1.2).
⨳
(10.10) Teorema. La retta reale R è uno spazio metrico completo. Per ogni n ≥ 1 lo spazio euclideo Rn è
completo.
Dim. Cominciamo a mostrare che R è completo. Se {xn } è una successione di Cauchy, allora per (10.3) è una
successione limitata che per (9.14) ha una sottosuccessione convergente ad un limite in R (se non fosse infinita
sarebbe immediato trovare il limite…). Ma per (10.5) allora {xn } converge in R, e dunque R è completo. La
seconda parte dell’enunciato segue da (10.8).
⨳
(10.11) Nota. Il campo Q non è completo: come sopra, basta trovare successioni di razionali convergenti a
numeri irrazionali.
(10.12) Nota. Per gli spazi metrici, la compattezza e la completezza sono concetti vicini, ma non equivalenti.
Infatti, R è completo, ma non è certamente compatto. Esistono anche spazi metrici compatti che non sono
completi? Come visto in (10.6), uno spazio metrico compatto è anche completo. Il legame può essere dato in
modo più preciso, dato che vale una generalizzazione del Teorema di Heine-Borel (che si chiama anch’esso
Teorema di Heine-Borel): uno spazio metrico è compatto se e soltanto se esso è completo e totalmente limitato.
Ricordiamo che uno spazio metrico è totalmente limitato quando vale la proprietà della proposizione (9.5) a
pagina 59 (si veda la nota a pie’ di pagina). Comunque, anche se è vero che uno spazio metrico compatto è
certamente completo, in generale uno spazio compatto non è necessariamente metrizzabile, e quindi a fortiori
può non essere completo.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
66
#5. COMPATTEZZA NEGLI SPAZI EUCLIDEI
(10.13) Esempio. Sia X = N con la metrica discreta. È uno spazio metrico limitato (la distanza tra due punti
non è mai maggiore di 1), ma non è uno spazio metrico totalmente limitato. Infatti, se ϵ ≤ 1, X non può essere
coperto da un numero finito di intorni circolari di raggio ϵ (tali intorni contengono solo un punto, il centro, e
N ha infiniti elementi). Le successioni di Cauchy in X sono tutte e sole le successioni definitivamente costanti,
che sono convergenti. Pertanto X è uno spazio metrico completo. Ovviamente X non è compatto, dal momento
che non ha un numero finito di punti (uno spazio con la topologia discreta è compatto se e soltanto se ha un
numero finito di punti).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
67
§ 10. SPAZI METRICI COMPLETI
§ 10.1.
OPZIONALE: COSTRUZIONE DI R (CANTOR)
*(-1.1) Dimostrare che se X e Y sono spazi metrici completi, allora X × Y con la metrica prodotto è uno spazio
metrico completo.
*(-1.2) Un sottospazio S ⊂ X di uno spazio metrico completo è completo se e solo se è chiuso in X.
*(-1.3) Si consideri Q con la topologia generata dagli intervalli aperti (a, b), con a, b ∈ Q, a < b (generata
dalla metrica d ( x, y) = |x − y|, notiamo che è una metrica a valori razionali). Dimostrare che se {xn } e {yn } sono
due successioni di Cauchy in Q, allora la somma {xn + yn } e il prodotto {xn yn } sono successioni di Cauchy in
Q. (Suggerimento: per la moltiplicazione usare il fatto che ogni successione di Cauchy è limitata (10.3))
*(-1.4) Consideriamo l’insieme R di tutte le successioni di Cauchy su Q. Dimostrare che R è un anello commutativo con unità, cioè che valgono i seguenti assiomi:
(i) ∀x, y, z ∈ R, ( x + y) + z = x + (y + z ), ( xy)z = x (yz ).
(ii) ∀x, y ∈ R, x + y = y + x, xy = yx.
(iii) ∃0 ∈ R : ∀x ∈ Rx + 0 = x; ∃1 ∈ R : ∀x ∈ R, x ̸= 0 =⇒ 1x = x.
(iv) ∀x ∈ R, ∃ unico y ∈ R : x + y = 0.
(v) ∀x, y, z ∈ R, x (y + z ) = xy + xz.
*(-1.5) Sia R come nell’esercizio precedente l’anello delle successioni di Cauchy, e N ⊂ R il sottoinsieme
definito da
N = {{xn } ∈ R : lim xn = 0 ∈ Q}.
n
Mostrare che N è un ideale in R, cioè che N è un sottogruppo additivo e se {xn } è una successione di Cauchy e
{zn } una successione di Cauchy convergente a zero allora la successione {zn xn } converge a zero. Dedurre che il
quoziente (algebrico) R := R/N è un anello (cioè l’insieme di classi di equivalenza di successioni di Cauchy,
dove {xn } ≡ {yn } ⇐⇒ limn ( xn − yn ) = 0).
*(-1.6) Dimostrare che R, definito come quoziente nell’esercizio precedente, è un campo, che contiene il campo
dei razionali Q come sottocampo. (Suggerimento: basta far vedere che se {xn } ̸∈ N, allora esiste ϵ > 0 per cui
se n è abbastanza grande xn > ϵ (oppure xn < −ϵ ), e dunque…)
*(-1.7) Dimostrare che la relazione di ordine di Q può essere estesa a R ponendo x < y ⇐⇒ y − x > 0 (e
dunque è sufficiente descrivere l’insieme dei numeri reali positivi, cioè le classi di equivalenza di successioni
di Cauchy che sono definitivamente positive), e cioè che R è un campo ordinato.
*(-1.8) Dimostrare che R (definito sopra) è completo (cioè che ogni successione di Cauchy in R converge).
(Suggerimento: una successione in R è una successione di classi di equivalenza di successioni: possiamo
scrivere la successione {xn } come {[an,k ]}, dove xn è uguale alla classe di equivalenza [an,k ] della successione
di Cauchy (in k) {an,k }k )
*(-1.9) Dimostrare che R ha la proprietà dell’estremo superiore (cioè che ogni sottoinsieme limitato superiormente ha estremo superiore in R). (Suggerimento: utilizzare un argomento di tipo “bisezione di intervalli” per
associare ad un insieme limitato superiormente una successione decrescente di intervalli chiusi, e quindi la
successione di Cauchy degli estremi – razionali – di questi intervalli; vedi la seconda dimostrazione di (9.10))
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
68
#5. COMPATTEZZA NEGLI SPAZI EUCLIDEI
*(-1.10) Se invece della metrica euclidea in Q si ripete il procedimento degli esercizi precedenti partendo dalla
metrica discreta su Q, cosa si ottiene? Cosa sono le successioni di Cauchy? Il quoziente R/N è ancora una
estensione del campo dei razionali Q? Quale?
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
69
Esercizi
ESERCIZI
*(5.1) Si consideri su N la famiglia τ di insiemi formata dall’insieme vuoto ∅ e dagli tutti i sottoinsiemi di N
con complementare finito. Sia X uno spazio topologico e {xn } una successione in X (vista come una funzione
f : N → X, definita da ∀n ∈ N : f (n) := xn ).
(i) Dimostrare che τ è una topologia per N.
(ii) Dimostrare che se {xn } è una successione convergente, allora la corrispondente funzione f : N → X è
continua all’infinito, cioè la controimmagine di ogni intorno del limite x̄ = limn xn ∈ X è un aperto di
N (nella topologia dei complementari finiti).
(iii) È vero che f è continua?
(iv) La seguente famiglia di sottoinsiemi di N è una topologia per N? L’insieme vuoto, N, i sottoinsiemi
finiti, e i sottoinsiemi con complementare finito.
(5.2) Dimostrare che un punto di accumulazione a di un sottoinsieme A ⊂ X di uno spazio metrico X ha la
seguente proprietà: ogni intorno di a in X interseca A in infiniti punti.
*(5.3) Si consideri in un campo totalmente ordinato una famiglia di intervalli chiusi In = [an , bn ] decrescenti
In ⊃ In+1 , per n → ∞. Si dimostri che se X ha la proprietà dell’estremo superiore (cioè ogni insieme limitato
superiormente ammette estremo superiore), allora
∩
In ̸= ∅.
n
(5.4) Dimostrare che il cilindro {( x, y, z ) ∈ R3 : x 2 + y2 = 1 ∧ z2 ≤ 1} con il bordo su z = 1 identificato ad un
punto è omeomorfo al cono {( x, y, z ) ∈ R3 : z2 = x 2 + y2 ∧ 0 ≤ z ≤ 1}.
(5.5) Dimostrare che il toro, definito come nell’esempio (7.10), è omeomorfo a S 1 × S 1 (dove S 1 è la circonferenza di raggio 1).
(5.6) Dimostrare che lo spazio dell’esempio (7.11) è omeomorfo ad una sfera di dimensione 2.
*(5.7) Dimostrare che il piano proiettivo, definito come nell’esempio (7.12), è omeomorfo al quoziente S 2 /∼ ,
dove x ∼ y ⇐⇒ x = ±y (antipodale).
(5.8) Dimostrare che incollando lungo il bordo due nastri di Möbius si ottiene una bottiglia di Klein (che cos’è
una bottiglia di Klein?).
(5.9) Quali dei seguenti spazi è compatto?
(i) Q.
(ii) La sfera S 2 .
(iii) La sfera S 2 meno un numero finito di punti.
(iv) La sfera S 2 meno un disco chiuso.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
70
#5. COMPATTEZZA NEGLI SPAZI EUCLIDEI
(v) La striscia di Möbius.
(5.10) Dimostrare che ogni sottospazio di uno spazio di Hausdorff è di Hausdorff.
(5.11) Consideriamo il seguente sottoinsieme di R2 (munito della topologia euclidea):
X = {( x, y) ∈ R2 : xy ̸∈ Z}.
(i) È aperto? È chiuso?
(ii) Consideriamo la circonferenza C di raggio 1 e centro (0, 0) di equazione x 2 + y2 = 1. L’intersezione
C ∩ X è aperta nella topologia di C? È chiusa? E nella topologia di R2 ?
(iii) Discutere della compattezza di X e C ∩ X.
(5.12) Si consideri l’intervallo
√
√
[0, 2) = {x ∈ R : 0 ≤ x < 2} ⊂ R.
(i) È chiuso nella topologia Euclidea?
√ √
√
(ii) Sia X l’intervallo (− 2, 2) ⊂ R con la topologia indotta da quella di R. Dato che [0, 2) è anche un
sottoinsieme di X, esso è un chiuso della topologia di X?
√
(iii) Calcolare l’insieme di tutti i maggioranti di [0, 2) in R.
(iv) Trovare, se esiste, un sottoinsieme Y ⊂ R tale che l’insieme di tutti i maggioranti di Y in R non è un
chiuso di R.
(5.13) Si consideri il sottoinsieme X di Q definito da
X={
q
: q ∈ N}.
q+1
(i) Determinare i punti di accumulazione di X.
(ii) X è un chiuso di Q?
(iii) Sia {an } una successione di frazioni di Q che converge a
Y = {an : n ∈ N} ⊂ Q. In questo caso Y è un chiuso di Q?
√
2 (̸∈ Q!) e Y l’insieme dei suoi elementi
(5.14) Sia C ⊂ Q un sottospazio compatto di Q (campo dei numeri razionali con la topologia Euclidea).
(i) Dimostrare che C è chiuso in Q.
(ii) Dimostrare che C è limitato in Q.
(iii) Dimostrare che C è anche un chiuso di R. (Suggerimento: Dato che l’inclusione i : Q → R è una
funzione continua (rispetto alle topologie Euclidee di Q e R)…)
(iv) Dedurre che l’interno di C è vuoto.
**(5.15) Su Z sia B la famiglia di tutte le progressioni aritmetiche (Ua,n = {a + kn : k ∈ Z} ⊂ Z, con n ̸= 0).
Dimostrare che:
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
71
Esercizi
(i) La famiglia B è una base per una topologia di Z.
(ii) In questa topologia, le progressioni Ua,n sono sia aperti che chiusi.
(iii) L’unione di un numero finito di progressioni aritmetiche è un chiuso.
(iv) Se Ap = U0,p denota l’insieme dei multipli del numero p, si dimostri che
∪
A=
Ap
p primo
non può essere chiuso, visto che il suo complementare ha un numero finito di elementi.
(v) Dedurre che esistono infiniti numeri primi.
(Harry Furstenberg: è una topologia metrizzabile!)
(5.16) Mostrare che se K1 e K2 sono due sottospazi compatti di uno spazio topologico X, allora l’unione
K1 ∪ K2 ⊂ X è un sottospazio compatto di X.
*(5.17) Si consideri N̄ = N ∪ {∞}, con ∞ ̸∈ N.
(i) L’insieme vuoto, N̄, tutti i sottoinsiemi di N e i sottoinsiemi di N̄ con complementare finito e che
contengono ∞ costituiscono una topologia?
(ii) N̄ è compatto rispetto a questa topologia?
(iii) Quali sono le funzioni continue N̄ → X? È vero che sono le successioni convergenti, se si pone x∞ =
limn xn ? Cioè, data una successione xn convergente a x ∈ X, è vero che la funzione f : N̄ → X definita
da f (n) = xn , f (∞) = x è continua? Viceversa, data una f : N̄ → X continua, allora la successione
xn = f (n) converge a f (∞)?
(iv) Se X è uno spazio topologico di Hausdorff, si consideri l’insieme X̂ = X ∪ {∞} (dove ∞ ̸∈ X), e la
seguente famiglia di sottoinsiemi di X̂: l’insieme vuoto, X̂, gli aperti di X ⊂ X̂ e tutti i complementari
X̂ ∖ K, al variare di K ⊂ X sottospazio compatto di X ⊂ X̂. Mostrare che si tratta di una topologia. (X̂
è detto compattificazione ad un punto di X, o anche compattificazione di Alexandroff; nel caso in cui
X è anche localmente compatto – cioè quando ogni punto di X ha un intorno compatto – anche X̂ è
Hausdorff)
(v) Mostrare che la topologia del punto precedente rende X̂ compatto, e l’inclusione X 7→ X̂ una funzione
continua, iniettiva e aperta (omeomorfismo sull’immagine/embedding).
(5.18) Dimostrare in modo rigoroso l’esercizio (3.21) di pagina 39: Sia X l’unione delle circonferenze {( x, y) ∈
R2 : ( x − 1n )2 + y2 = ( 1n )2 }, per n = 1, 2, 3 . . . con la topologia indotta da R2 , e sia Y lo spazio ottenuto
identificando tutti gli interi Z ⊂ R ad un punto. Allora X e Y non sono omeomorfi.
Suggerimento: procedere come segue.
(i) Mostrare che ( x − 1n )2 + y2 =
X è limitato.
1
n2
⇐⇒ x 2 + y2 =
2x
n
=⇒ x 2 + y2 ≤ 2x ⇐⇒ ( x − 1)2 + y2 ≤ 1, e quindi
(ii) Mostrare che Z = {( x, y, t ) ∈ R2 × [0, 1] : x 2 + y2 = 2tx} è (chiuso e limitato in R3 , e quindi) compatto.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
72
#5. COMPATTEZZA NEGLI SPAZI EUCLIDEI
(iii) Usando la continuità della proiezione Z → [0, 1], definita da ( x, y, t ) 7→ t, mostrare che il sottospazio
X̂ = {( x, y, t ) ∈ Z : t = 0 ∨ t −1 ∈ N} è chiuso e limitato in R3 , e quindi compatto.
(iv) Dedurre che X è compatto.
1
}, e per ogni k ∈ Z, Uk ⊂ Y l’insieme
3
Uk = {[t ] ∈ Y : k < t < k + 1}. Mostrare che U e Uk sono aperti nella topologia quoziente di Y .
(v) Sia U ⊂ Y l’insieme definito da U = {[t ] ∈ Y : mink∈Z |t − k| <
(vi) Mostrare che {U} ∪ {Uk }k∈Z è un ricoprimento aperto di Y .
(vii) Mostrare che il ricoprimento aperto appena definito non ammette sottoricoprimenti finiti di Y , e quindi
Y non è compatto.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
Settimana N° 6
CONNESSIONE
§ 11.
(11.7) Definizione.
SPAZI CONNESSI
(Cfr.)*
Il teorema del valore intermedio si può esprimere in termini di connessione:
(11.1) Definizione. Uno spazio topologico X è detto connesso se gli unici sottoinsiemi di X simultaneamente
aperti e chiusi† sono ∅ e X.
Quando si considera un sottospazio Y ⊂ X, allora Y è connesso se è connesso nella topologia indotta da
X. Osserviamo che se A ⊂ X è un sottoinsieme sia chiuso che aperto, anche il suo complementare X ∖ A è sia
chiuso che aperto. Quindi X = A ∪ ( X ∖ A), cioè X è unione disgiunta di due aperti non vuoti.
(11.2) Teorema. Uno spazio topologico X è connesso se e solo se X non è unione di due aperti non vuoti e
disgiunti X = A1 ∪ A2 . (Equivalentemente: uno spazio topologico X non è connesso se e solo se X è unione di
due aperti non vuoti e disgiunti X = A1 ∪ A2 ).
(11.3) Esempio. Sia S 0 = {−1, +1} ⊂ R la sfera di dimensione 0 (soluzioni dell’equazione x 2 = 1). Entrambi
i punti sono chiusi in R, e quindi chiusi in S 0 (che è chiuso in R): S 0 non è connesso.
(11.4) Esempio. L’insieme vuoto e gli spazi con un solo punto sono connessi.
(11.5) Esempio. Uno spazio con la topologia discreta è connesso se e soltanto se ha un solo punto.
(11.6) Esempio. La retta razionale Q non è connessa. Infatti, consideriamo l’intervallo
√
A = ( 2, ∞) ⊂ Q.
Si tratta di un aperto, che però è anche chiuso, visto che
√
√
A = ( 2, ∞) = {x ∈ Q : 2 < x}
√
= {x ∈ Q : 2 ≤ x}
√
= [ 2, ∞)
* Cfr:
† In
Sernesi Vol II, Cap III, §11 [1].
inglese: clopen.
73
74
#6. CONNESSIONE
√
Quest’ultimo è chuso perché il suo complementare è l’intervallo aperto (−∞, 2). Ora, A non è vuoto, e non
è uguale a Q, è sia aperto che chiuso, e quindi Q non è connesso.
Un intervallo in R (più in generale: in un insieme ordinato) è un insieme I ⊂ R contenente più di un punto,
tale che x, y ∈ I, s ∈ R, x < s < y =⇒ s ∈ I.
Ricordiamo che m ∈ R è un minorante di un insieme di numeri X ⊂ R se ∀x ∈ X, m ≤ x (cioè se m ≤ X).
Analogamente, M ∈ R è un maggiorante di X se ∀x ∈ X, x ≤ M (cioè se X ≤ M). Si dice che X è limitato da
sotto se esiste un minorante di X. Si dice che X è limitato da sopra se esiste un maggiorante di X. L’insieme
di tutti i minoranti di X è quindi un insieme non vuoto se e solo se X è limitato da sotto. L’insieme di tutti i
maggioranti di X è un insieme non vuoto se e solo se X è limitato da sopra.
L’insieme dei minoranti di X si scrive come
minoranti = {m ∈ R : ∀x ∈ X, m ≤ x}
= {m ∈ R : ∀x ∈ X, m ∈ (−∞, x ]}
∩
= {m ∈ R : m ∈
(−∞, x ]}
=
∩
x∈X
(−∞, x ].
x∈X
Dato che è l’intersezione di una famiglia di chiusi, è un sottoinsieme chiuso di R. L’insieme dei maggioranti
di X si scrive come
maggioranti = {M ∈ R : ∀x ∈ X, M ≥ x}
= {M ∈ R : ∀x ∈ X, M ∈ [ x, +∞)}
∩
[ x, +∞)}
= {M ∈ R : M ∈
=
∩
x∈X
[ x, +∞).
x∈X
Dato che è l’intersezione di una famiglia di chiusi, è un sottoinsieme chiuso di R. L’estremo inferiore è il
massimo dei minoranti, l’estremo superiore è il minimo dei maggioranti.
Dato che R ha la proprietà dell’estremo superiore e dell’estremo inferiore, gli intervalli sono tutti gli
insiemi del tipo (−∞, b],(−∞, b),(a, b),(a, b], [a, b), [a, b], [a, +∞), (a, +∞), con a < b. Mostreremo che tutti
gli intervalli sono connessi. Cominciamo dall’intervallo chiuso (compatto) [a, b].
(11.8) Teorema. Ogni intervallo chiuso [a, b] ⊂ R è connesso.
Dim. Per assurdo, supponiamo che l’intervallo [a, b] sia unione di due aperti disgiunti non vuoti [a, b] =
A1 ∪ A2 (dove A1 , A2 ̸= ∅, A1 ∩ A2 = ∅, e quindi A1 e A2 sono chiusi nella topologia di [a, b]). Essendo
[a, b] chiuso in R, A1 e A2 sono anch’essi chiusi e non vuoti in R (nota: non sono necessariamente aperti!
Vedi esercizio (4.3)). Dato che gli estremi superiore e inferiore di un sottoinsieme chiuso di R sono contenuti
nell’insieme stesso (vedi esercizio (4.2)), risulta sup Ai ∈ Ai , inf Ai ∈ Ai per i = 1, 2. Consideriamo per ogni
y ∈ [a, b] l’insieme chiuso
By = {x ∈ A1 : x ≤ y} = [a, y] ∩ A1 ⊂ A1 .
L’intersezione
B=
∩
By = {x ∈ A1 : ∀y ∈ A2 , x ≤ y}.
y∈A2
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
75
§ 11. SPAZI CONNESSI
è dunque un chiuso contenuto in A1 (che consiste di tutti i minoranti di A2 in A1 ). Ora, a meno di cambiare
gli indici, possiamo supporre che a ∈ A1 (e quindi a ̸∈ A2 , poiché A1 ∩ A2 = ∅), e quindi a ∈ B. L’estremo
superiore s1 = sup B (che esiste perché B ̸= ∅ ed è limitato) appartiene al chiuso B (e quindi è un minorante di
A2 ), e dunque appartiene a A1 (che contiene B). D’altra parte, consideriamo l’estremo inferiore s2 di A2 , che
appartiene a A2 dato che A2 è chiuso: si ha che s2 ≤ t per ogni t ∈ A2 , e
t ∈ [a, b] ∧ t > s2 =⇒ ∃y ∈ A2 : t > y,
(cioè non esistono minoranti di A2 più grandi di s2 , s2 è il massimo dei minoranti). Quindi s1 ≤ s2 , dato che
gli elementi di B sono minoranti di A2 . In altre parole, B è contenuto nell’insieme di tutti i minoranti di A2 , e
quindi il massimo di B (cioè s1 ) non può essere piú grande del massimo dei minoranti (cioè s2 ).
Ora, se s1 = s2 , si ha
A1 ⊃ B ∋ s1 = s2 ∈ A2 =⇒ s1 = s2 ∈ A1 ∩ A2 ,
che è assurdo visto che A1 ∩ A2 = ∅. Dunque deve essere s1 < s2 .
Prendiamo dunque un s ∈ [a, b] compreso tra s1 e s2 :
sup B = s1 < s < s2 = inf A2 .
Dato che per definizione di s1 (estremo superiore di B)
t ∈ [a, b] ∧ t > s1 =⇒ t ̸∈ B,
il punto s non è in B. Inoltre s < s2 = inf A2 , e quindo s non può essere un elemento di A2 (e dunque sta in A1 ),
ed è un minorante di A2 . Ma questo significa che s ∈ B, il che è assurdo.
⨳
Un Corollario è il seguente Teorema.
(11.9) Teorema. Se J ⊂ R è un intervallo, allora J è connesso.
Dim. Supponiamo che J sia un intervallo, e che per assurdo non sia connesso (nella topologia metrica), cioè
che esista A ⊂ J sia aperto che chiuso, A ̸= ∅, A ̸= J. Dato che A ̸= ∅, esiste a ∈ A. Dato che A ̸= J, esiste
b ̸∈ A, b ∈ J. Possiamo supporre senza perdere in generalità che a < b. Per la definizione di intervallo, ogni s
tale che a < s < b è in J, e quindi [a, b] ⊂ J. Ora, osserviamo che A è un chiuso di J, e quindi l’intersezione
 = A ∩ [a, b] è un chiuso di [a, b]. Il suo complementare [a, b] ∖  è l’intersezione di J ∖ A con [a, b], e quindi
è un chiuso di [a, b]. Ma allora  è anche un aperto di [a, b]. Siccome a ∈ Â,  non è vuoto. Siccome b ̸∈ Â, Â
è diverso da [a, b]. Ma questo è assurdo, perché [a, b] è connesso per il Teorema (11.8).
⨳
Diamo un’altra dimostrazione del Teorema (11.9), in cui la prima parte è identica alla prima parte della
dimostrazione precedente, e che è indipendente dalla validità del Teorema (11.8).
Altra Dimostrazione. Supponiamo che J sia un intervallo, e che per assurdo non sia connesso (nella topologia
metrica), cioè che esista A ⊂ J sia aperto che chiuso, A ̸= ∅, A ̸= J. Dato che A ̸= ∅, esiste a ∈ A. Dato che
A ̸= J, esiste b ̸∈ A, b ∈ J. Possiamo supporre senza perdere in generalità che a < b. Per la definizione di
intervallo, ogni s tale che a < s < b è in J, e quindi [a, b] ⊂ J. Ora, osserviamo che A è un chiuso di J, e
quindi l’intersezione  = A ∩ [a, b] è un chiuso di [a, b], che è chiuso in R. Allora  è un chiuso di R, non
vuoto. Se poniamo m = sup Â, otteniamo m ∈  ⊂ A. Dato che  ⊂ A e b ̸∈ A, si ha m < b. L’intervallo
(m, b] ⊂ [a, b] ⊂ J non può contenere punti di Â, né di A, e quindi è contenuto nel complementare di A in J,
che è chiuso in J. Proprio perché J ∖ A è chiuso in J, l’estremo m di (m, b] ⊂ J ∖ A appartiene a J ∖ A, e
quindi m ̸∈ A, che contraddice il fatto che m ∈ Â ⊂ A.
⨳
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
76
#6. CONNESSIONE
(11.10) Nota. Vedremo che il teorema precedente può essere generalizzato nel modo seguente: Un sottoinsieme
A ⊂ R con almeno due punti è connesso se e solo se è un intervallo. Per la parte “solo se”, si cerchi di dimostrare
(esercizio (6.5)) che se un insieme ha almeno due punti e non è un intervallo, allora non è connesso (si veda
anche la prossima nota).
(11.11) Nota. Usando la stessa tecnica di dimostrazione di (11.8), si può dimostrare che A ⊂ R non è connesso
se e solo se esistono x, y ∈ A, s ̸∈ A tali che x < s < y (cioè A è connesso se e solo se x, y ∈ A, x < s < y =⇒
s ∈ A). Infatti, se A non fosse connesso, si definiscono A1 , A2 , B, s1 e s2 come sopra (s1 = sup B e s2 = inf A2 ),
e deve risultare s1 < s2 . Ma allora esiste s ̸∈ A tale che s1 < s < s2 – basta prendere s = 21 (s1 + s2 ). Questo
fa seguire dall’ultimo assioma di (8.1) la connessione di R. Viceversa, se esistono x, y ∈ A e s ̸∈ A tali che
x < s < y, allora si possono definire i seguenti sottoinsiemi (chiusi e aperti) di A:
A1 = {x ∈ A : x ≤ s} = {x ∈ A : x < s}
A2 = {x ∈ A : x ≥ s} = {x ∈ A : x > s}
la cui intersezione è vuota e la cui unione è A.
(11.12) Teorema. Se X è connesso e f : X → Y è una funzione continua, allora f ( X ) ⊂ Y è connesso (con la
topologia indotta da Y – si dice che l’immagine di un connesso è connessa).
Dim. Se f ( X ) fosse non connesso, esisterebbero A1 ⊂ f ( X ) e A2 ⊂ f ( X ) aperti disgiunti (nella topologia
indotta) e non vuoti tali che f ( X ) = A1 ∪ A2 . Le controimmagini f −1 A1 e f −1 A2 sarebbero aperti disgiunti
non vuoti in X tali che X = f −1 A1 ∪ f −1 A2 , e dunque X non sarebbe connesso.
⨳
(11.13) Corollario. Se X e Y sono due spazi topologici omeomorfi, allora X è connesso se e solo se Y è
connesso.
Dim. Come nella dimostrazione del corollario (8.18)
⨳
Ricordiamo che S 0 = {±1} è lo spazio con due punti e la topologia discreta.
(11.14) Uno spazio X è connesso se e solo se ogni funzione continua f : X → S 0 è costante.
Dim. Supponiamo che X sia connesso. Allora la sua immagine è un sottospazio connesso di S 0 . Dato che S 0
non è connesso, f X non può essere S 0 . Dato che f X ̸= ∅, f X ha esattamente un elemento, e quindi f è costante.
Viceversa, se X non è connesso allora esistono A1 , A2 aperti disgiunti non vuoti tali che X = A1 ∪ A2 . Si
definisca allora la funzione f : X → S 0 ponendo
+1 if x ∈ A1
f (x) =
−1 if x ∈ A2 .
La funzione è ben definita, dato che A1 ∩ A2 = ∅ e X = A1 ∪ A2 . È continua: basta osservare che gli aperti di
S 0 sono tutti i suoi sottoinsiemi ∅, {+1}, {−1}, S 0 , e la controimmagine di ognuno di essi è aperto in X:
f −1 (∅) = ∅
f −1 ({+1}) = A1
f −1 ({−1}) = A2
f −1 (S 0 ) = X.
E non è una funzione costante.
⨳
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
77
§ 11. SPAZI CONNESSI
(11.15) Esempio. La funzione f : Q → {−1, 1}, definita ponendo
√
se x < 2
1
√
f (x) =
−1 se x > 2
è continua su Q.
(11.16) (Teorema del valore intermedio) Sia f : [a, b] ⊂ R → R una funzione continua tale che f (a) < 0 e
f (b) > 0. Allora esiste x0 ∈ (a, b) tale che f ( x0 ) = 0.
Dim. L’intervallo [a, b] è connesso per (11.8), e quindi la sua immagine
f ([a, b]) = { f ( x ) : a ≤ x ≤ b}
è connessa, e dunque un intervallo (vedi anche (11.11)). Cioè, visto che f (a) ∈ f ([a, b]) e f (b) ∈ f ([a, b]), anche tutti i valori intermedi y ∈ [ f (a), f (b)] appartengono all’immagine f ([a, b]). In particolare, 0 ∈ [ f (a), f (b)],
e quindi 0 ∈ f ([a, b]), cioè esiste x ∈ [a, b] tale che f ( x ) = 0.
⨳
(11.17) Esempio (Bisezione). Applichiamo (11.16) ad un caso concreto: determinare in modo
costruttivo una
√
2
successione di razionali che converge a un irrazionale. Osserviamo per esempio che q = 2 ∈ [0, 1] risolve
l’equazione 2x 2 = 1, per cui non è un razionale (occorre che si sappia dimostrarlo!). Non solo, è anche l’unico
punto di [0, 1] che risolve l’equazione (perché?). Ora costruiamo per ricorsione una successione di intervalli
[an , bn ] di lunghezza 2−n con la proprietà che
2a2n − 1 < 0 < 2b2n − 1
nel modo seguente. Per n = 0, poniamo
a0
b0
Si ha 2 · 02 − 1 < 0 < 2 · 12 − 1, e
=0
= 1.
√
0 = a0 <
2
< b0 = 1
2
dato che
1
< 12 .
2
Supponiamo di avere definito [an−1 , bn−1 ], entrambi razionali tali che 2a2n−1 − 1 < 0 < 2b2n−1 − 1. Allora c =
√
an−1 + bn−1
2
è ancora razionale, e quindi non può essere uguale a
che è irrazionale. Ma allora 2c2 − 1 ̸= 0,
2
2
visto che in [0, 1] c’è un’unica soluzione di 2x 2 − 1 = 0. Si hanno quindi solo due casi, in cui si pone
[c, bn−1 ] se 2c2 − 1 < 0;
[an , bn ] =
[an−1 , c] se 2c2 − 1 > 0.
02 <
In entrambi i casi la lunghezza è la metà di quella di [an−1 , bn−1 ], cioè la metà di 2−(n−1) (ipotesi di induzione),
che è 21 2−n+1 = 2−n ; inoltre
c < 0 ⇒ 2a2n − 1 = 2c2 − 1 < 0 < 2b2n−1 − 1 = 2b2n − 1,
c > 0 ⇒ 2a2n − 1 = 2a2 − 1 < 0 < 2c2 − 1 = 2b2n − 1.
n−1
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
78
#6. CONNESSIONE
Quindi la successione è ben definita. Osserviamo che per ogni n ≥ 0 si ha [an , bn ] ⊂ [√
an−1 , bn−1 ]. Dato che per
ogni n si ha q ∈ [an , bn ], si ha quindi che sia an che bn sono numeri che approssimano 2/2 a meno di 2−n , cioè
√
√
2
2
−n
|
− an | < 2 , |
− bn | < 2−n .
2
2
√
Questo segue dal fatto che 2/2 ∈ [an , bn ] e che bn − an = 2−n .
(11.18) Nota. È possibile implementare facilmente questo algoritmo, per avere approssimazioni dell’ordine
2−n , per ogni n, in qualche linguaggio che possa fare operazioni su frazioni senza limiti sulla grandezza dei
numeratori/denominatori coinvolti (altrimenti prima o poi per il calcolatore 2−n = 0). Meglio sarebbe se fosse
direttamente in grado di eseguire operazioni tra frazioni. Ma anche supponendo di poter eseguire solo operazioni su interi di grandezza arbitraria, è possibile definire in modo semplice somme e prodotti di frazioni
(come?); risulta un po’ più efficiente se si sa come ridurre le frazioni ai minimi termini (dividendo
numeratore
√
e denominatore per il massimo comun divisore). In altre parole, fissato per esempio q = 2/2 dovrebbe essere
possibile scrivere un programma che per k assegnato calcola in modo esatto tutte le prime k cifre decimali di
q (si veda anche la nota (9.9) a pagina 60).*
(11.19) Definizione. Definiamo componenti connesse di uno spazio topologico X i sottospazi connessi massimali (cioè i sottospazi connessi di X che non sono contenuti in sottospazi connessi di X).
L’insieme dei sottospazi connessi di X è parzialmente ordinato, rispetto all’inclusione di sottoinsiemi. Un
elemento massimale è un sottospazio connesso Y che non è contenuto in nessun sottospazio connesso di X. Ogni
elemento x ∈ X è contenuto in un tale Y : infatti, {x} è connesso. Se {x} non è contenuto in nessun connesso
piú grande, allora {x} stesso è massimale e basta porre {x} = Y . Altrimenti, x appartiene ad un connesso piú
grande. È vero che un connesso massimale che contiene x esiste sempre? È vero che ne esiste uno solo? È vero
che quindi X si decompone in una unione disgiunta di componenti connesse?
(11.20) Esempio. Uno spazio X è connesso se e solo se ha una sola componente connessa. Le componenti
connesse di Q sono …
* Lo
studente interessato potrebbe provare a calcolare le prime 200 cifre di π utilizzando per esempio lo sviluppo (è solo uno dei
molti metodi possibili)
n
∑
x 2k+1
arctan x =
(−1)k
+ rn
2k + 1
k=0
con resto |rn | <
x 2n+3 /(2n + 3)
e l’identità
π
= arctan 1.
4
1
è minore di 10−200 quando 2n + 3 > 10200 , forse occorrono un po’ troppi termini. Roadrunner, il supercomputer più
2n + 3
potente del mondo, supera il petaflop/s, cioè è in grado di eseguire 1105 teraflop/s (cioè approssimativamente 1015 FLoating point
Operations Per Second). Ogni termine della somma richiede certamente più di una operazione (e non è detto che si usino float: a volte
bastano gli interi), ma in ogni caso con questa formula occorrerebbero a Roadrunner non meno di 10185 secondi per terminare, cioè
non meno di 3 · 10177 anni. Tenuto conto che l’età stimata dell’universo è intorno ai 14 · 109 anni, il metodo è destinato al fallimento.
Usando invece identità del tipo (formule di Machin)
Dato che
1
1
1
1
1
π
= arctan + arctan = arctan + arctan + arctan
4
2
3
2
5
8
è possibile sommare un numero ragionevole di termini. Lo studente interessato può provare a calcolare le prime 200 cifre di π con
questo metodo, e anche a dimostrare le identità usate.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
79
§ 11. SPAZI CONNESSI
(11.21) Teorema. Le componenti connesse di Q ⊂ R sono i suoi punti.
(11.22) Siano B ⊂ X e {Y∪
w }w∈W sottoinsiemi connessi di uno spazio topologico X tali che ∀w ∈ W , B ∩ Yw ̸= ∅.
Allora l’unione Y = B ∪
Yw è connesso.
w∈W
Dim. Basta dimostrare che ogni funzione continua f : Y → {±1} è costante. Dato che B è connesso, la restrizione f |B è continua e quindi per (11.14) è costante. Quindi esiste y ∈ S 0 tale che f (b) = y, per ogni b ∈ B.
Ora, per ogni w ∈ W lo spazio Yw è connesso, e quindi la restrizione f |Yw è una funzione costante dato che è
continua. Ma Yw ∩ B ̸= ∅, quindi esiste b ∈ Yw ∩ B, e deve essere f (Yw ) = { f (b)} = {y}. Quindi per ogni x ∈ Y
si ha f ( x ) = y, cioè f è costante.
Vediamo un’altra dimostrazione. Supponiamo che A1 e A2 siano aperti disgiunti tali che Y = A1 ∪ A2 . Per
ogni w ∈ W , A1 ∩ Yw e A2 ∩ Yw sono aperti disgiunti in Yw , e quindi non possono essere entrambi non vuoti,
visto che Yw è connesso: cioè, Yw ⊂ A1 oppure Yw ⊂ A2 . Lo stesso per A1 ∩ B e A2 ∩ B: supponiamo senza
perdere in generalità che B ⊂ A1 . Ma allora, poiché per ipotesi B ∩ Yw ̸= ∅, deve anche essere ∀w ∈ W , Yw ⊂ A1 ,
e cioè Y ⊂ A1 . Ma allora A2 = ∅.
⨳
∩
(11.23) Corollario. Siano Aw , per w ∈ W , sottospazi connessi di uno spazio X tali che w Aw ̸= ∅. Allora
∪
w Aw è connesso.
Dim. Basta prendere uno degli Aw e chiamarlo B: per ogni w′ ∈ W
∩
Aw ⊂ Aw′ ∩ B,
∅ ̸=
w
e quindi si può applicare il lemma precedente.
⨳
(11.24) Nota (Componenti connesse). Per ogni x ∈ X sia C x l’unione di tutti i sottospazi connessi di X che
contengono x
∪
Y
Cx =
Y connesso, x∈Y ⊂X
Dato che {x} è connesso e contiene x, l’insieme C x contiene x. Per (11.22), questa unione è un sottoinsieme
connesso di X che contiene x. Non può essere contenuto propriamente in un connesso piú grande, perché se cosí
fosse sarebbe contenuto propriamente in un connesso che contiene x, e dunque sarebbe contenuto propriamente
in sé stesso. Quindi C x è una componente connessa (secondo la definizione (11.19)). Osserviamo che se z ∈ C x ,
allora Cz = C x : infatti se Cz è un connesso massimale che contiene z, dato che anche C x ∪ Cz contiene z (ed
è connesso per (11.22)), deve essere C x ∪ Cz ⊂ Cz , cioè C x ⊂ Cz . Analogamente, Cz ∪ C x ⊂ C x , dato che è
un connesso e contiene x, e quindi Cz ⊂ C x . Due componenti connesse o sono disgiunte oppure coincidono:
infatti se si ha C x ∩ C y ̸= ∅, esiste z ∈ C x ∩ C y , e quindi Cz = C x e Cz = C y , da cui C x = C y . Quindi ogni
x ∈ X è contenuto in una e una sola componente connessa di X: X è l’unione disgiunta delle sue componenti
connesse.
Diamo una dimostrazione diversa del Teorema (11.9).
(11.25) Corollario. Se I ⊂ R è un intervallo, allora I è connesso.
Dim. Per definizione I ha più di un punto, e se x, y ∈ I, allora x < s < y =⇒ s ∈ I. Siano x1 e x2 due punti
di I, e x0 = 21 ( x1 + x2 ). Allora x1 < x0 < x2 e quindi x0 ∈ I, da cui segue che
∪
I=
[a, b],
a∈I, b∈I, a<x0 <b
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
80
#6. CONNESSIONE
visto che x ∈ I =⇒ x ∈ [ x, x2 ] (se x < x0 ) oppure x ∈ [ x1 , x ] (se x > x0 ), oppure x ∈ [ x1 , x2 ] (se x = x0 ). Ora,
se a ∈ I, b ∈ I e a < x0 < b, allora x0 ∈ [a, b], quindi la tesi segue da (11.22) ponendo B = {x0 } e Yw = [a, b]
con w ∈ W = {(a, b) ∈ I 2 : a < x0 < b}.
⨳
(11.26) Corollario. La retta reale R è connessa.
Dim. Basta osservare che si può scrivere R = {0} ∪
corollario (11.25).
∪
R>0 [−R, R]
e applicare (11.22), oppure direttamente il
⨳
(11.27) Teorema. I sottoinsiemi connessi di R sono tutti e soli gli insiemi con un elemento solo e gli intervalli.
Dim. Per (11.25) gli intervalli sono connessi, e i punti sono sempre connessi. Ora, un insieme X ⊂ R con più
di due punti che non sia un intervallo è tale che esistono x, y ∈ X e s ∈ R tali che x < s < y ma s ̸∈ X, e quindi
X = [ X ∩ (−∞, s)] ∪ [ X ∩ (s, +∞)] ,
cioè unione disgiunta di due aperti non vuoti, e quindi X non è connesso.
⨳
(11.28) Esempio. Rn è connesso: è unione di rette per l’origine. Rn ∖ {0} è connesso per n ≥ 2. Perché? Vedi
esercizio (6.2).
(11.29) Teorema. Due spazi topologici X e Y sono connessi se e solo se il prodotto X × Y è connesso.
Dim. Se X × Y è connesso, allora X e Y , in quanto immagini delle proiezioni canoniche p1 : X × Y → X e
p2 : X × Y → Y , sono connessi (vedi (11.12)). Viceversa, se X e Y sono connessi, allora si scelga y0 ∈ Y : per
ogni x ∈ X i sottospazi {x} × Y ⊂ X × Y e X × {y0 } ⊂ X × Y sono omeomorfi rispettivamente a Y e X, e quindi
entrambi connessi. Ma allora
∪
X × Y = X × {y0 } ∪ ({x} × Y ),
x∈X
e quindi possiamo applicare (11.22) con B = X × {y0 } e Y x = {x} × Y .
⨳
(11.30) Proposizione. Se A ⊂ X è connesso, allora la chiusura A di A in X è connesso.
Dim. Per (11.14), basta mostrare che ogni funzione continua f : A → {±1} è costante. Ma la restrizione di f
ad A è costante e quindi f ( A) è un solo punto: supponiamo che sia uguale a 1 (altrimenti sostituiamo f con
− f ). Per (3.10)-2 (pagina 14), f ( A) ⊂ f ( A), e quindi
f ( A) ⊂ f ( A) = {1} = {1},
cioè f è costante anche sulla chiusura A.
⨳
(11.31) Corollario. Ogni spazio topologico X è unione disgiunta delle sue componenti connesse. Ogni componente connessa è chiusa in X.
Dim. Abbiamo visto sopra che X è unione disgiunta delle sue componenti connesse. Se C x è una componente
connessa, allora C x non può essere più grande di C x , e quindi C x = C x .
⨳
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
81
§ 11. SPAZI CONNESSI
§ 11.1.
SPAZI CONNESSI PER ARCHI
(Cfr.)*
Un arco (oppure un cammino) in uno spazio X è una mappa (funzione continua) γ : [0, 1] → X. Si dice
che l’arco parte da γ (0) e arriva a γ (1).
(11.32) Definizione. Si dice che uno spazio X è connesso per archi se per ogni coppia di punti x0 , x1 ∈ X
esiste un arco γ tale che γ (0) = x0 e γ (1) = x1 .
(11.33) Se f : X → Y è una funzione continua suriettiva e X è connesso per archi, allora Y è connesso per
archi.
Dim. Siano y0 , y1 due punti di Y . La funzione è suriettiva, e dunque esistono x0 e x1 in X tali che f ( x0 ) = y0
e f ( x1 ) = y1 . Dato che X è connesso, esiste un cammino γ : [0, 1] → X tale che γ (0) = x0 e γ (1) = x1 .
Ma la composizione di funzioni continue è continua, e quindi il cammino ottenuto componendo γ con f :
f ◦ γ : [0, 1] → X → Y è un cammino continuo che parte da y0 e arriva a y1 .
⨳
(11.34) Corollario. Se due spazi X e Y sono omeomorfi, allora X è connesso per archi se e solo se Y è connesso
per archi.
Dim. Si dimostra come nel caso della connessione e della compattezza (8.18).
⨳
(11.35) Teorema. Uno spazio connesso per archi è connesso.
Dim. Sia X uno spazio connesso per archi. Supponiamo che non sia connesso, e dunque che esista A ⊂ X,
A ̸= ∅, A ̸= X sia aperto che chiuso. Dato che A ̸= ∅, possiamo scegliere un punto x0 ∈ A. Dato che A ̸= X,
possiamo scegliere un punto x1 ̸∈ A. Dato che X è connesso, esiste un cammino γ : [0, 1] → X che parte da x0
e arriva a x1 . La controimmagine γ −1 ( A) è un sottoinsieme chiuso di [0, 1] (dato che γ è continua e A è chiuso)
ed al tempo stesso un sottoinsieme aperto (dato che γ è continua e A aperto). Ma [0, 1] è connesso, quindi γ −1 A
può solo essere ∅ oppure tutto [0, 1]. Ma x0 ∈ A, e quindi γ −1 A ̸= ∅, e x1 ̸∈ A, e quindi γ −1 A ̸= [0, 1], e questo
ci porta ad una contraddizione.
⨳
(11.36) Teorema. Se X è un sottoinsieme aperto e connesso di Rn , allora X è connesso per archi.
Dim. Vedi esercizio (6.20)
⨳
(11.37) Proposizione. I sottoinsiemi connessi di R sono connessi per archi.
(11.38) Proposizione. Non è vero in generale che se X è connesso allora è connesso per archi.
La dimostrazione (opzionale) è data dal seguente esempio.
(11.39) Esempio (La pulce e il pettine). Sia A ⊂ R2 il seguente insieme (con la topologia euclidea di R2 ):
1
A = {( , y) : 0 ≤ y ≤ 1, n ≥ 1 intero} ∪ {( x, 0) : 0 < x ≤ 1}.
n
Applicando (11.22) si vede che A è connesso. È anche connesso per archi: per esempio c’è un cammino che
collega tutti i punti di A con (1, 0) ∈ A.
* Cfr:
Sernesi Vol II, Cap III, §12 [1].
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
82
#6. CONNESSIONE
(0, 12 )
Figura 6.1: La pulce e il pettine dell’esempio (11.39).
Se P denota il punto di coordinate (0, 21 ), allora anche lo spazio X = {P} ∪ A è connesso: infatti P è di
accumulazione per A in R2 , e quindi la chiusura di A in X coincide con X. Ma per (11.30) la chiusura di A in
X è connesso, visto che lo è A, e quindi X è connesso perché coincide con la chiusura di A in X.
Non è connesso per archi: sia γ : I → X una funzione continua tale che γ (0) = P e γ (1) ̸= P. Le
componenti di γ sono due funzioni continue ( x (t ), y(t )). Sia m = sup{t ∈ I : x (t ) = 0} (l’estremo superiore
esiste dato che x (0) = 0). Per continuità, si ha x (m) = 0 e y(m) = 21 (cioè γ (m) = P). Visto che γ (1) ̸= P
e P è il solo punto con ascissa nulla, si ha x (1) > 0 e quindi m < 1. Si prenda m′ tale che m < m′ ≤ 1. Se
m′ − m è abbastanza piccolo, si ha che y(t ) è abbastanza vicino a 21 per ogni t ∈ [m, m′ ]: supponiamo quindi
che m′ − m è cosí piccolo (ma positivo) da far sí che per ogni t ∈ [m, m′ ] si abbia y(t ) ≥ 14 . Osserviamo che
per costruzione comunque x (m′ ) > 0; l’insieme
B = {x (t ) : m ≤ t ≤ m′ }
è l’immagine dell’intervallo chiuso [m, m′ ] mediante la funzione continua x (t ), e quindi è un intervallo (perché
connesso) chiuso (perché compatto), cioè è della forma
B = {x (t ) : m ≤ t ≤ m′ } = [0, M ],
dove M è il massimo di x (t ) in [m, m′ ] e risulta M > 0.
Ma ogni punto di γ ([m, m′ ]) ha ordinata maggiore di 41 , e quindi deve avere ascissa uguale a un valore del
tipo 1n con n intero, e dunque B non può essere un intervallo del tipo [0, M ]. È quindi assurdo supporre che
γ (1) ̸= P, cioè tutti i cammini continui con γ (0) = P sono costanti in P: segue che X non è connesso per archi.
(11.40) Esempio. Il sottoinsieme X ⊂ R2 definito da
X = {( x, y) ∈ R2 : x + y + xy ̸= 1}
è un aperto di R2 , quindi è connesso per archi se e soltanto se è connesso. Non è connesso, dato che la sua
immagine in R mediante la funzione continua f ( x, y) = x + y + xy non è un intervallo (e quindi non è connesso)
perché contiene i due punti f (2, 0) = 2 e f (0, 0) = 0, ma non 1 che è intermedio. Osserviamo che X è l’unione
disgiunta dei due aperti A1 e A2 non vuoti definiti da
A1 = {( x, y) ∈ R2 : x + y + xy > 1}
A2 = {( x, y) ∈ R2 : x + y + xy < 1}.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
83
§ 11. SPAZI CONNESSI
10
5
-20
-15
-10
-5
0
5
10
15
20
-5
-10
Figura 6.2: Figura per l’esempio (11.40).
Verifichiamo che A2 è connesso per archi (e quindi connesso): se ( x1 , y1 ) ∈ A2 , allora il cammino γ (t ) definito
per t ∈ [0, 1] da
γ (t ) = (−1 + t ( x1 + 1), −1 + t (y1 + 1))
parte da γ (0) = (−1, −1) e arriva a γ (1) = ( x1 , y1 ). Per ogni t ∈ [0, 1] si ha
(−1 + t ( x1 + 1)) + (−1 + t (y1 + 1)) + (−1 + t ( x1 + 1))(−1 + t (y1 + 1))
= −1 + t 2 ( x1 + y1 + x1 y1 + 1)
< −1 + t 2 (1 + 1) = 2t 2 − 1
≤ 2 − 1 = 1,
e quindi γ (t ) ∈ A2 .
Invece A1 non è connesso: si può scrivere come unione di aperti disgiunti non vuoti A+1 e A−1 definiti da
A+1 = {( x, y) ∈ R2 : x + y + xy > 1 ∧ x + y > 0}
A−1 = {( x, y) ∈ R2 : x + y + xy > 1 ∧ x + y < 0}.
Sono ovviamente disgiunti, inoltre x + y + xy > 1 =⇒ x + y ̸= 0 (perché?), e quindi A1 = A+1 ∪ A−1 .
Verifichiamo che A+1 e A−1 sono connessi per archi, e quindi connessi. Cambiamo coordinate in R2 , e prendiamo
le nuove coordinate a = x + 1, b = y + 1 (è un omeomorfismo R2 ≈ R2 ). Allora nella coordinate (a, b) si ha
A+1 ≈ {(a, b) ∈ R2 : ab > 2 ∧ a + b > 2}.
Definiamo γ (t ) = (a1 + b1 − tb1 , a1 + b1 − ta1 ). Si ha
γ (0) = (a1 + b1 , a1 + b1 )
γ (1) = (a1 , b1 ).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
84
#6. CONNESSIONE
Inoltre per ogni t ∈ [0, 1] si ha a1 > 0, b1 > 0 e quindi
(a1 + b1 − tb1 )(a1 + b1 − ta1 )
≥ a1 b1 > 2,
a1 + b1 − tb1 + a1 + b1 − ta1 = (2 − t )(a1 + b1 )
≥ (a1 + b1 ) > 2,
quindi γ (t ) ∈ A+1 . Definiamo ora un’altro cammino η(t ) ponendo per t ∈ [0, 1]
η(t ) = (2 + t (a1 + b1 − 2), 2 + t (a1 + b1 − 2)).
Si ha
η(0) = (2, 2)
η(1) = (a1 + b1 , a1 + b1 ).
Dato che
(t, t ) ∈ {(a, b) ∈ R2 : ab > 2 ∧ a + b > 2}
se e soltanto se t 2 > 2, per mostrare che η(t ) ∈ A+1 occorre mostrare che
(2 + t (a1 + b1 − 2))2 > 2.
Ma questo segue dal fatto che a1 + b1 > 2, quindi 2 + t (a1 + b2 − 2) > 2, e quindi il suo quadrato è maggiore
di 2. Nelle coordinate a, b, quindi possiamo definire il cammino α (t ) in A+1 ponendo
η (2t )
α (t ) =
γ (2t − 1)
se t ∈ [0, 1/2]
se t ∈ [1/2, t ],
che collega (2, 2) con qualsiasi punto (a1 , b1 ) di A+1 . Per A−1 si procede allo stesso modo (esercizio). Concludiamo quindi dicendo che X ha tre componenti connesse: A2 , A+1 e A−1 (c’era una dimostrazione più veloce?).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
85
§ 11. SPAZI CONNESSI
§ 11.2.
OPZIONALE: CONSTRUZIONE DI R (DEDEKIND)
(-2.1) Consideriamo il sottoinsieme Q ⊂ Q dei numeri razionali positivi o nulli: Q = {x ∈ Q : x ≥ 0}. Lo
scopo di questo esercizio (e dei seguenti) è di rivisitare la costruzione delle sezioni di Dedekind in termini di
connessione (così come la costruzione di Cantor dei numeri reali come completamento di Q è fatta in termine
di convergenza di successioni di Cauchy).* Sappiamo che Q e Q non sono connessi (perché?): esistono quindi
due aperti-e-chiusi non vuoti A1 ,A2 ⊂ Q tali che A1 ∪ A2 = Q. Definiamo le sezioni di Q come segue: una
sezione α ⊂ Q è un intervallo aperto e limitato di Q contenente lo 0, cioè
(i) 0 ∈ Q;
(ii) p ∈ α =⇒ ∃ϵ > 0, Bϵ ( p) ⊂ α (α è aperto).
(iii) p ∈ α =⇒ [0, p) ⊂ α (α è un intervallo che contiene lo 0);
(iv) α è limitato (equivalentemente, α ̸= Q, dal momento che α è un intervallo che contiene 0).
Dimostrare che le sezioni (definite come sopra) soddisfano le seguenti proprietà:
(i) α non è vuoto e α ̸= Q;
(ii) Se p ∈ α e q ∈ Q e q < p allora q ∈ α;
(iii) Se p ∈ α allora p < r per qualche r ∈ α.
(-2.2) Sia S l’insieme di tutte le sezioni di Q. Consideriamo la funzione f : Q ∖ {0} → S definita da f (q) =
α = [0, q), per ogni q ∈ Q ∖ {0}. Dimostrare che è iniettiva (non è definita in 0).
*(-2.3) Dimostrare che la relazione di inclusione α < β ⇐⇒ α ⊂ β ∧ α ̸= β è una relazione di ordine totale
su Q, cioè:
(i) Se α e β sono sezioni in S, allora una sola delle relazioni seguenti è vera: α < β, β < α, β = α.
(ii) (proprietà transitiva): se α, β e γ sono in S, e α < β ∧ β < γ, allora α < γ.
*(-2.4) Dimostrare che l’insieme delle sezioni S ha la proprietà dell’estremo superiore: ogni insieme non vuoto
e limitato in S ammette estremo superiore. (Suggerimento: se A ⊂ S è un insieme limitato e non vuoto, allora
∪
si può definire l’unione U = α∈A α – le sezioni sono sì elementi di S, ma sono anche intervalli di numeri
razionali, e quindi è possibile definire l’unione…poi si dimostra che l’unione in effetti è una sezione, e quindi
U ∈ S …è un maggiorante di A, ed è poi possibile vedere che è il minimo dei maggioranti…)
*(-2.5) Ora dobbiamo mostrare che la somma e il prodotto, definite in Q, si estendono a S. Definiamo la somma
come
α + β = {a + b : a ∈ α, b ∈ β}
e il prodotto come
αβ = {ab : a ∈ α, b ∈ β}.
Dimostrare che la somma e il prodotto di sezioni sono ancora sezioni. Dimostrare che la funzione f dell’esercizio (-2.2) conserva le operazioni di somma, prodotto e la relazione d’ordine: f ( p + q) = f ( p) + f (q),
f ( pq) = f ( pq), p < q =⇒ f ( p) < f (q).
* Questa
non è la costruzione dei reali con le sezioni di Dedekind.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
86
#6. CONNESSIONE
*(-2.6) Dimostrare che se α, β ∈ S, e α < β, allora esiste un unico γ ∈ S tale che β = α + γ.
(-2.7) Dimostrare che se α ∈ S, allora esiste un unico β tale che αβ = 1 (dove identifichiamo 1 = [0, 1) = f (1).
*(-2.8) Ora siano S+ e S− due copie di S, e sia R = S− ∪ {0} ∪ S+ . Se α ∈ S, allora indicheremo con +α
(o anche semplicemente con α) l’elemento corrispondente in S+ , e con −α l’elemento corrispondente di S− .
Definire operazioni di addizione, moltiplicazione e la relazione d’ordine su R in modo che R risulti un campo
ordinato.
*(-2.9) Mostrare che la funzione f di (-2.2) si estende in modo naturale ad una inclusione di campi
Q ⊂ R.
(Vale la pena di concludere osservando che R = R…).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
87
Esercizi
{{}, {1}, {2}, {3}, {1, 2}, {1, 3}, {2, 3}, {1, 2, 3}}
{{}, {1}, {2}, {1, 2}, {1, 3}, {1, 2, 3}}
{{}, {3}, {1, 3}, {2, 3}, {1, 2, 3}}
{{}, {1}, {2}, {1, 2}, {1, 2, 3}}
{{}, {1}, {1, 2}, {1, 2, 3}}
{{}, {1}, {1, 2, 3}}
{{}, {1}, {2, 3}, {1, 2, 3}}
{{}, {1, 3}, {1, 2, 3}}
{{}, {1, 2, 3}}
Figura 6.3: Topologie con tre punti
ESERCIZI
*(6.1) Dimostrare (direttamente) che gli intervalli semiaperti [a, b) sono connessi, così come gli intervalli
(−∞, a), (−∞, a], (a, ∞) e [a, ∞) (vedi teorema (11.8) e (11.22)).
(6.2) Dimostrare che Rn ∖ {0} è connesso, per n ≥ 2.
(6.3) Dimostrare che i punti di uno spazio topologico sono connessi.
(6.4) Dimostrare che Q non è connesso. Quali sono le sue componenti connesse? (Nota: Q non ha la topologia
discreta!)
(6.5) Dimostrare che i sottoinsiemi connessi non vuoti di R sono tutti e soli i singoli punti e gli intervalli
(dove diciamo che un sottoinsieme A ⊂ R è un intervallo se contiene almeno due punti distinti e se x, y ∈ A,
x < s < z =⇒ s ∈ A).
(6.6) Sia X un insieme con almeno due elementi. Quali sono i sottoinsiemi connessi, se X ha la topologia
discreta? E se ha la topologia banale?
(6.7) Se X è connesso e Y ha meno aperti di X, allora è vero che anche Y è connesso? Utilizzare questo fatto per
determinare nel grafo (cfr. figure 6.3 e 6.4 a pagg. 87 e 88) delle classi di omoeomorfismo di spazi topologici
finiti su 3 e 4 punti quali sono quelli connessi. Tra tutti gli spazi topologici finiti (a meno di omeomorfismo)
con 3 o 4 punti, quanti sono quelli connessi?
(6.8) Determinare quali dei seguenti sottospazi di R2 sono connessi:
(i) {( x, y) ∈ R2 : x 2 + y2 < 1}.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
88
#6. CONNESSIONE
{{}, {1}, {2}, {3}, {4}, {1, 2}, {1, 3}, {2, 3}, {1, 4}, {2, 4}, {3, 4}, {1, 2, 3}, {1, 2, 4}, {1, 3, 4}, {2, 3, 4}, {1, 2, 3, 4}}
{{}, {1}, {2}, {3}, {1, 2}, {1, 3}, {2, 3}, {1, 4}, {1, 2, 3}, {1, 2, 4}, {1, 3, 4}, {1, 2, 3, 4}}
{{}, {1}, {4}, {1, 4}, {2, 4}, {3, 4}, {1, 2, 4}, {1, 3, 4}, {2, 3, 4}, {1, 2, 3, 4}}
{{}, {4}, {1, 4}, {2, 4}, {3, 4}, {1, 2, 4}, {1, 3, 4}, {2, 3, 4}, {1, 2, 3, 4}}
{{}, {1}, {2}, {1, 2}, {1, 3}, {1, 2, 3}, {1, 2, 4}, {1, 2, 3, 4}}
{{}, {1}, {2}, {1, 2}, {1, 2, 3}, {1, 2, 4}, {1, 2, 3, 4}}
{{}, {3}, {3, 4}, {1, 3, 4}, {2, 3, 4}, {1, 2, 3, 4}}
{{}, {4}, {1, 4}, {2, 4}, {1, 2, 4}, {1, 3, 4}, {1, 2, 3, 4}}
{{}, {1}, {2}, {3}, {1, 2}, {1, 3}, {2, 3}, {1, 2, 3}, {1, 2, 4}, {1, 2, 3, 4}}
{{}, {1}, {2}, {1, 2}, {1, 3}, {1, 2, 3}, {1, 3, 4}, {1, 2, 3, 4}}
{{}, {1}, {2}, {3}, {1, 2}, {1, 3}, {2, 3}, {1, 2, 3}, {1, 2, 3, 4}}
{{}, {1}, {2}, {1, 2}, {1, 3}, {1, 2, 3}, {1, 2, 3, 4}}
{{}, {1}, {2}, {1, 2}, {1, 2, 3}, {1, 2, 3, 4}}
{{}, {4}, {1, 4}, {2, 4}, {1, 2, 4}, {1, 2, 3, 4}}
{{}, {3, 4}, {1, 3, 4}, {2, 3, 4}, {1, 2, 3, 4}}
{{}, {1}, {1, 2}, {1, 2, 3}, {1, 2, 3, 4}}
{{}, {1, 4}, {1, 2, 4}, {1, 2, 3, 4}}
{{}, {1}, {2}, {1, 2}, {3, 4}, {1, 3, 4}, {2, 3, 4}, {1, 2, 3, 4}}
{{}, {2}, {1, 4}, {1, 2, 4}, {1, 3, 4}, {1, 2, 3, 4}}
{{}, {1}, {2, 4}, {1, 2, 4}, {1, 2, 3, 4}}
{{}, {1}, {1, 2, 4}, {1, 2, 3, 4}}
{{}, {1, 3, 4}, {1, 2, 3, 4}}
{{}, {1}, {2}, {1, 2}, {1, 3}, {2, 4}, {1, 2, 3}, {1, 2, 4}, {1, 2, 3, 4}}
{{}, {1}, {2}, {1, 2}, {1, 3, 4}, {1, 2, 3, 4}}
{{}, {1}, {2}, {1, 2}, {1, 2, 3, 4}}
{{}, {1}, {2, 3, 4}, {1, 2, 3, 4}}
{{}, {1}, {1, 2, 3, 4}}
{{}, {1}, {1, 3}, {2, 4}, {1, 2, 4}, {1, 2, 3, 4}}
{{}, {4}, {1, 4}, {2, 3, 4}, {1, 2, 3, 4}}
{{}, {1}, {1, 2}, {1, 2, 3, 4}}
{{}, {2, 3}, {1, 4}, {1, 2, 3, 4}}
{{}, {1, 4}, {1, 2, 3, 4}}
{{}, {1, 2, 3, 4}}
Figura 6.4: Topologie con quattro punti
(ii) {( x, y) ∈ R2 : x 2 + y2 = 1}.
(iii) {( x, y) ∈ R2 : x 2 + y2 ̸= 1}.
*(6.9) Supponiamo che f : X → Z sia una funzione continua (dove Z, con la topologia indotta da R, ha la
topologia discreta) e non costante. Dimostrare che X non è connesso.
*(6.10) Dimostrare che Rn ∖ {0} è connesso per n ≥ 2. Dedurne che la sfera di dimensione n S n e il piano
proiettivo P2 (R) sono connessi.
(6.11) In uno spazio topologico X si consideri la seguente relazione: x ∼ y ⇐⇒ ∃C ⊂ X connesso tale
che x ∈ C ∋ y. Mostrare che è una relazione di equivalenza. Mostrare poi che le classi di equivalenza sono le
componenti connesse di X. Dedurre che le componenti connesse (definite in (11.19)) di uno spazio topologico
sono ben definite e disgiunte (cfr. nota (11.24)).
*(6.12) Sia X l’unione dei sottospazi A e B di R2 definiti da A = {( x, y) ∈ R2 : x = 0 ∧ −1 ≤ y ≤ 1} e
B = {( x, y) ∈ R2 : y = cos 1x ∧ 0 < x ≤ 1}. Dimostrare che X è connesso. (Suggerimento: uno è nella chiusura
dell’altro)
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
89
Esercizi
1
y
0.5
0
0
0.2
0.4
0.6
0.8
x
1
-0.5
-1
*(6.13) Siano A = {( x, y) : 21 ≤ x ≤ 1, y = 0} e B = {( x, y) : y = nx , 0 ≤ x ≤ 1 per qualche n ∈ N}. Dimostrare
che X = A ∪ B è connesso.
1.2
y
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
x
1
-0.2
(6.14) Sia S n = {x ∈ Rn+1 : |x|2 = 1}. Dimostrare che S n è connesso. (Suggerimento: Rn ∖ {0} è connesso)
*(6.15) Dimostrare che S 1 non è omeomorfo ad un intervallo. (Suggerimento: S 1 meno un punto …)
*(6.16) Dimostrare che gli intervalli (0, 1) e [0, 1) non sono omeomorfi. Scrivere una corrispondenza biunivoca
tra (0, 1) e [0, 1), però.
(6.17) Dimostrare che uno spazio topologico X è connesso se e solo se ogni volta che si scrive come X = A ∪ B
con A ̸= ∅ e B ̸= ∅ allora A ∩ B ̸= ∅ oppure B ∩ A ̸= ∅.
(6.18) Dimostrare che se S ⊂ R non è un intervallo (cioè se esistono x, y, z con x < s < y, x, y ∈ S e s ̸∈ S )
allora S non è connesso.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
90
#6. CONNESSIONE
(6.19) Mostrare che se uno spazio topologico X è unione di aperti connessi disgiunti e non vuoti, allora questi
sono le componenti connesse di X. Dimostrare poi che se X ha un numero finito di componenti connesse allora
esse sono sia aperte che chiuse e disgiunte. Trovare un esempio di spazio con infinite componenti connesse
tutte chiuse ma mai aperte.
*(6.20) Dimostrare che se X ⊂ Rn è un sottoinsieme aperto e connesso di Rn , allora è anche connesso per
archi. (Suggerimento: osservare che i cammini si possono comporre nel seguente modo: se γ : [0, 1] → X è
un cammino che va da x0 ∈ X a x1 ∈ X, e γ ′ : [0, 1] → X un secondo cammino che va da x1 a x2 , allora γ ′
può essere riparametrizzato (utilizzando un omeomorfismo [0, 1] ≈ [1, 2]) come γ ′′ : [1, 2] → X. Ma allora è
possibile definire un nuovo cammino α : [0, 2] → X “incollando” i due cammini – e verificare che è ancora
continuo. Ora non rimane che dimostrare la seguente cosa: se si sceglie x0 ∈ X, lo spazio di tutti i punti
raggiungibili con un cammino che parte da x0 è un aperto (“incollando” al cammino un pezzettino di cammino
rettilineo…), ma è anche un chiuso (cioè lo spazio di tutti i punti non raggiungibili con un cammino che parte
da x0 è un aperto) …)
(6.21) Sia X uno spazio topologico, e ∼ la seguente relazione in X: x ∼ y se e solo se esiste cammino
γ : [0, 1] → X che parte da x e arriva a y. Dimostrare che la relazione “∼” è di equivalenza. Cosa sono le
classi di equivalenza?
Ricordiamo che nel sistema posizionale con base b all’allineamento
(an . . . a3 a2 a1 a0 .a−1 a−2 . . .)b
(finito a sinistra) corrisponde il numero reale
an bn + . . . + a3 b3 + a2 b2 + a1 b1 + a0 + a−1 b−1 + a−2 b−2 + . . . .
In generale si ha che 0 ≤ an < b, ma ci sono sistemi in cui questo non è richiesto (vedi l’esercizio (6.23)).
*(6.22) Sia C ⊂ [0, 1] ⊂ R l’insime di numeri reali compresi tra 0 e 1 che hanno uno sviluppo in base ternaria
(con cifre 0, 1, 2) in cui non compare mai la cifra 1 (quando la rappresentazione non è unica, come per esempio
quando l’ultima cifra è 2 periodica (0.2̄)3 = (1.0)3 oppure (0.12̄)3 = (0.2)3 , basta che per una delle due
rappresentazioni sia vero che non compare la cifra 1). L’insieme C si chiama insieme di Cantor. Mostrare che
(i) C è chiuso;
(ii) C è compatto;
(iii) se x ∈ C, allora x è di accumulazione per il complementare di C.
(iv) se x ∈ C, allora x è di accumulazione per C ma non è interno a C.
(v) se Y ⊂ C è un sottospazio connesso e Y ̸= ∅, allora Y ha un solo elemento (cioè l’insieme di Cantor è
totalmente sconnesso, come Q).
(vi) (opzionale) Mostrare che C è omeomorfo allo spazio 2N (con la topologia prodotto).
**(6.23) Nella notazione posizionale ternaria bilanciata invece degli allineamenti in base 3 (con i simboli 0,
1, 2) si considerano gli allineamenti dei tre simboli 1, 0, 1 (che corrispondono agli interi −1,0,1) in base 3.
Nel sistema ternario si ha che 0 ≤ an < 3, ma nel sistema ternario bilanciato si pone −1 ≤ an ≤ 1, e si
indica 1 = −1 per semplicità (negli anni 1950-1960, per un certo periodo il sistema ternario bilanciato è stato
preso seriamente in considerazione, insieme al sistema decimale e al sistema binario, per la costruzione di
calcolatori elettronici – per esempio dal gruppo di S.L. Sobolev a Mosca).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
91
Esercizi
(i) Quanto valgono (0.1̄)3 , (0.01̄)3 , (0.1̄)3 e (0.01̄)3 ?
(ii) È vero che ogni x ∈ R può essere scritto in notazione ternaria bilanciata?
(iii) La rappresentazione è unica? L’insime degli x che non hanno una rappresentazione unica è chiuso in
R? (osservare che se x non ha una rappresentazione unica, allora nemmeno x/3 e x ± 1 hanno una
rappresentazione unica e quindi h+1/2
…)
3k
(iv) Sia X l’insieme dei numeri reali in [− 21 , 21 ] che ha almeno una rappresentazione ternaria bilanciata in cui
non compare mai la cifra 1. Ha le stesse proprietà dell’insieme di Cantor (dell’esercizio precedente, cioè
è compatto, totalmente sconnesso e ogni punto è di accumulazione sia per X che per il complementare
di X)?
*(6.24) Sia f : X ⊂ R → R una funzione continua definita su un intervallo (connesso) X ⊂ R.
(i) Mostrare che se f non è (strettamente) monotona (né crescente né decrescente), allora non è iniettiva.
(ii) Dedurre che se f è continua e iniettiva, l’immagine di un intervallo aperto è un intervallo aperto (e quindi
che f è una mappa aperta).
(iii) Dimostrare che se f : X → R è continua e biunivoca, allora è un omeomorfismo.
(iv) Mostrare che non esistono funzioni continue e iniettive f : S 1 → R.
(6.25) Utilizzare l’esercizio (6.24) per mostrare che (utilizzando il fatto che le funzioni ( x, y) 7→ x + y e
( x, y) 7→ xy sono continue su R2 , e che x 7→ x −1 è continua R ∖ {0} → R):
(i) Per ogni n ∈ N, n ≥ 1, la funzione f : [0, ∞) → [0, ∞) ⊂ R definita da f ( x ) = x n è un omeomorfismo.
(ii) Per ogni n ∈ N, n ≥ 1, per ogni x ≥ 0, x ∈ R, esiste un unico y ∈ R tale che x n = y (la radice n-esima
√
√
di x, indicata con n x) e che la funzione x 7→ n x è continua.
√
(iii) La funzione x 7→ x p/q := q x p , definita per x ≥ 0, x ∈ R e p, q ∈ Z, q ̸= 0, è una funzione continua di x.
Nel prossimo esercizio, utilizzare il seguente fatto (provare a dimostrarlo): comunque si scelgano n numeri
positivi x1 , . . . , xn si ha
( x + x + · · · + x )n
1
2
n
x1 x2 . . . xn ≤
,
n
e l’uguaglianza è verificata solo quando i numeri sono tutti uguali fra loro. Ovvero: la media geometrica di n
numeri positivi è sempre minore o uguale alla loro media aritmetica, e le due medie sono uguali se e solo se i
numeri sono tutti uguali tra loro.
*(6.26) Per l’esercizio (6.25), per ogni numero razionale x = p/q e ogni reale b > 0 abbiamo visto che esiste
bx . Dimostrare i seguenti fatti.
(i) Per ogni x, y razionali e ogni b > 0 reale si ha bx+y = bx by e b0 = 1.
(ii) Per ogni numero razionale x = qp dell’intervallo (0, 1) e per ogni numero reale b > 0 diverso da 1 vale
la disuguaglianza bx < 1 + (b − 1) x (utilizzare il confronto tra media geometrica e media aritmetica per
n + m numeri, di cui n sono uguali a b e m uguali a 1.)
(iii) Se b > 1, funzione x 7→ bx è una funzione Q → R continua e strettamente monotona crescente.
(iv) Se b > 1, la funzione x 7→ bx := sup{by : y ∈ Q, y ≤ x}, definita R → R, è ben definita, monotona e
continua, ed estende la funzione x 7→ bx definita Q → R.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
92
#6. CONNESSIONE
(v) Esiste una funzione continua x 7→ logb x, che associa ad x > 0, x ∈ R, l’unico numero reale y tale che
by = x.
(vi) La funzione f : R>0 × R → R definita da f (b, x ) = bx è una funzione continua (rispetto alla topologia
prodotto del dominio). (suggerimento: si consideri l’omeomorfismo log2 : (0, ∞) ≈ R)
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
Settimana N° 7
GRUPPI DI TRASFORMAZIONI
§ 12.
GRUPPI DI MATRICI
(Cfr.)*
Ricordiamo gli assiomi di gruppo (astratto): un gruppo è un insieme G, munito di operazione binaria (di
solito indicata con la moltiplicazione) G × G → G che sia associativa, in cui esista l’elemento neutro 1 ∈ G,
e per cui ogni g ∈ G abbia un inverso g−1 (cioè un elemento g−1 tale che gg−1 = g−1 g = 1). Nella realtà
considereremo sempre sottogruppi del gruppo di funzioni biunivoche X → X definite su un certo insieme X
(permutazioni, se X è finito, oppure …).
(12.1) Definizione. Un gruppo topologico è sia un gruppo sia uno spazio topologico di Hausdorff, con in più
le seguenti proprietà di continuità:
(i) Il prodotto G × G → G, definito da ( g, h) 7→ gh è una funzione continua.
(ii) L’inversione G → G definita da g 7→ g−1 è una funzione continua.
(12.2) Esempio. I campi Q e R (visti come gruppi additivi) sono gruppi topologici rispetto alla somma. I
gruppi moltiplicativi Q ∖ {0}, R ∖ {0} sono gruppi topologici rispetto al prodotto. Per (12.5) sotto, basta dimostralo per R. La funzione f : R2 → R definita da ( x, y) 7→ x + y è continua: se ( x0 , y0 ) ∈ R2 , per ogni ϵ > 0
esiste δ = ϵ/2 tale che
max{|s|, |t|} < δ =⇒ |s + t| < ϵ
⇐⇒ | f ( x0 + s, y0 + t ) − f ( x0 , y0 )| < ϵ .
Quindi f è continua nella topologia prodotto (che è equivalente a quella euclidea). Analogamente (facile) la
funzione x 7→ −x è continua. Per il prodotto, la funzione definita da f ( x, y) = xy è continua: se ( x0 , y0 ) ∈ R2 ,
per ogni ϵ > 0
∃δx > 0 : |s| < δx =⇒ |sy0 | < ϵ /3
∃δy > 0 : |t| < δy =⇒ |tx0 | < ϵ /3.
Se si pone quindi
* Cfr:
√
δ = min{δx , δy , ϵ /3}
Nacinovich, Cap I [2].
93
94
si ha
#7. GRUPPI DI TRASFORMAZIONI
max{|s|, |t|} < δ =⇒ |( x0 + s)(y0 + t ) − x0 y0 | ≤
≤ |tx0 | + |sy0 | + |st| < ϵ /3 + ϵ /3 + ϵ/3 = ϵ .
Per quanto riguarda la funzione x 7→ x −1 , sia x0 ̸= 0. Allora esiste δ1 > 0 tale che |t| < δ1 =⇒ |x0 + t| >
|x0 |
2
=⇒ |x0 + t|−1 <
. Se poniamo quindi
2
|x0 |
δ = min{δ1 ,
otteniamo un δ > 0 per cui
ϵ |x0 |2
}
2
1
1 |t|
|t| < δ =⇒ − =
x0 + t x0 |x0 + t||x0 |
2|δ|
<
≤ ϵ,
|x0 |2
e quindi x 7→ x −1 è una funzione continua.
(12.3) Nota. Ogni gruppo, munito della topologia discreta, può essere visto come gruppo topologico. Per
esempio, l’anello degli interi Z (in cui si considera solo la struttura di somma) è un gruppo discreto infinito.
(12.4) Esempio. Z/nZ è gruppo topologico (con la topologia discreta).
(12.5) Sia G un gruppo topologico. Allora: Se H ⊂ G è un sottogruppo di G allora (con la topologia indotta
da G) è un gruppo topologico.
Dim. Se H ⊂ G è un sottogruppo, allora la moltiplicazione e l’inversa sono mappe ottenute per restrizione:
m : H × H ⊂ G → G, i : H ⊂ G → H,
e quindi sono continue. Questo dimostra (12.5) (insieme al fatto che un sottospazio di uno spazio di Hausdorff
è di Hausdorff).
⨳
(12.6) Siano dati N spazi topologici X1 , X2 , X3 , …, XN . Consideriamo il prodotto X = X1 × X2 × · · · × XN
e le proiezioni sulle componenti p1 : X → X1 , p2 : X → X2 , …, pN : X → XN . Allora una funzione f : Y →
X1 × X2 × · · · × XN è continua se e solo se lo sono tutte le composizioni pi ◦ f : Y → Xi . (Di solito si scrive,
per semplificare, fi = pi ◦ f )
Dim. Basta applicare un numero finito di volte (6.3) di pagina 30.
⨳
(12.7) Lo spazio euclideo Rn è gruppo topologico rispetto alla somma
( x1 , . . . , xn ) + (y1 , . . . , yn ) = ( x1 + y1 , . . . , xn + yn ).
Dim. È una conseguenza del fatto che la somma è una funzione continua (come anche il prodotto), e del lemma
(12.6).
⨳
(12.8) Sia GL(n) = GL(n, R) il gruppo (chiamato gruppo lineare) di tutte le matrici invertibili n × n a coefficienti reali (gruppo rispetto alla moltiplicazione di matrici), munito della topologia metrica – indotta dalla
2
inclusione GL(n) ⊂ Rn . Allora GL(n) è un gruppo topologico. Lo stesso vale per il gruppo lineare complesso
GL(n, C).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
95
§ 12. GRUPPI DI MATRICI
Dim. Osserviamo che lo spazio di tutte le matrici n × n è isomorfo (come spazio vettoriale, per esempio)
2
2
a Rn , per cui in questa lezione denoteremo con il simbolo Rn lo spazio delle matrici n × n. L’inclusione
2
2
GL(n) ⊂ Rn è indotta dall’inclusione di GL(n) nello spazio di tutte le matrici n × n. Dal momento che Rn è
metrico, GL(n) è di Hausdorff. Dobbiamo mostrare che la moltiplicazione di matrici e l’inversione inducono
funzioni continue m : GL(n) × GL(n) → GL(n) e i : GL(n) → GL(n). Osserviamo che, dato che GL(n) ha
2
la topologia indotta da Rn , le funzioni m e i sono continue se e solo se lo sono le corrispondenti funzioni
2
2
m : GL(n) × GL(n) → Rn e i : GL(n) → Rn , e quindi, per (12.6) se tutte le composizioni con le proiezioni
pi sono continue (cioè, se ogni componente è continua). Ma il prodotto di matrici (righe per colonne) si scrive
come
N
∑
((ai, j ), (bi, j )) 7→ ( ai,k bk, j ),
k=1
cioè è un polinomio nei coefficienti delle matrici (ai, j ) e (bi, j ). Dal momento che ogni polinomio è funzione
continua, la moltiplicazione è continua. Analogamente, il determinante di una matrice è espressione polinomiale dei suoi coefficienti ed è sempre diverso da zero in GL(n), ed anche i cofattori (che compaiono nella
definizione di matrice inversa) si esprimono come polinomi dei coefficienti, per cui la funzione di inversione
i è continua. Per le matrici con coefficienti complessi vale esattamente lo stesso ragionamento.
⨳
(12.9) Il gruppo lineare GL(n, R) non è compatto.
2
Dim. Per il teorema (9.13) un sottoinsieme di Rn è compatto se e solo se chiuso e limitato, e quindi GL(n, R)
non è compatto perché non è limitato: contiene tutte le matrici diagonali λIn , con λ ∈ R. Non è nemmeno
2
chiuso: infatti, nella dimostrazione di (12.8) abbiamo usato il fatto che la funzione determinante det : Rn → R
è continua. Per definizione si ha
GL(n, R) = {M : det ( M ) ̸= 0},
2
cioè GL(n, R) è la controimmagine del sottospazio aperto R ∖ {0} ⊂ R, ed è quindi un aperto di Rn . Ma
quest’ultimo spazio è connesso, e quindi un aperto non vuoto con complementare non vuoto non può essere
chiuso.
⨳
Descriviamo ora due sottogruppi importanti di GL(n, R):
Gruppo ortogonale: O(n) = {A ∈ GL(n, R) : At A = AAt = In }.
Gruppo speciale ortogonale: SO(n) = {A ∈ O(n) : det ( A) = 1}.
(12.10) Sia O(n) il gruppo ortogonale, costituito da tutte le matrici ortogonali n × n a coefficienti reali, e
SO(n) il gruppo speciale ortogonale, costituito da tutte le matrici di O(n) con determinante +1. Allora O(n)
e SO(n) sono gruppi topologici compatti.
Dim. Ricordiamo che O(n) è formato da tutte le matrici A (invertibili) di GL(n) tali che AAt = At A = In
2
(dove At indica la trasposta di A e In la matrice identica n × n). Dato che O(n) ⊂ GL(n) ⊂ Rn , per (9.13)
dobbiamo mostrare che è chiuso e limitato. La moltiplicazione di matrici è continua, e chiaramente l’operazione
2
2
di trasposizione induce un omeomorfismo Rn → Rn , per cui la funzione
2
2
f : Rn → Rn
definita da
A 7→ AAt
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
96
#7. GRUPPI DI TRASFORMAZIONI
2
si può scrivere come composizione di funzioni continue. Gli insiemi costituiti da singoli punti di Rn sono tutti
2
2
chiusi, ed in particolare l’insieme {In } ⊂ Rn è chiuso. Dunque f −1 (In ) è un sottospazio chiuso di Rn ; ma
f −1 (In ) = {A ∈ Rn : f ( A) = In }
2
2
= {A ∈ Rn : AAt = In }
= O (n)
e dunque O(n) è chiuso. Ora, si indichino con a:,1 , a:,2 , …a:,n i vettori colonna di A ∈ O(n). La condizione
AAt = In si può riscrivere come
1 se i = j
a:,i · a:, j =
0 se i ̸= j
dove v · w indica il prodotto scalare standard in Rn , e dunque, considerando la prima equazione, si ha per ogni
i
a:,i · a:,i = a21,i + a22,i + · · · + a2n,i = 1,
e quindi ai, j ≤ 1 per ogni i, j = 1, . . . , n. Ne segue che
∑
a2i, j = n ≤ n,
i, j
2
e dunque O(n) è limitato nella metrica euclidea di Rn .
Non rimane che dimostrare che SO(n) è compatto. Ma, dato che si può scrivere come la controimmagine di
1 mediante la funzione (continua) determinante det : O(n) → R, esso è un sottospazio chiuso di O(n). Allora
⨳
segue da (8.15) che esso è compatto.
(12.11)[ (Rotazioni
e riflessioni) Mostriamo che SO(2) ≈ S 1 .
]
a c
Se
∈ SO(2), allora valgono le uguaglianze
b d
(*)
ad − cb = 1 (il determinante)
2
2
a +b = 1
c2 + d 2 = 1
ac + bd = 0.
Osserviamo che se (a, b) ̸= 0, allora l’uguaglianza ac + bd = 0 vale se e solo se esiste λ ∈ R tale che d = λa
e c = −λb. Infatti,
a(−λb) + b(λa) = 0 .
Viceversa, può essere che b ̸= 0 oppure che b = 0. Nel primo caso, si ha ac/b + d = 0 e ponendo λ = −c/b
risulta
−λa + d = 0, −λb = c.
Se b = 0, allora deve necessariamente essere a ̸= 0 (per l’ipotesi (a, b) ̸= (0, 0)), e si può porre λ = d/a per
avere le uguaglianze
c + bd/a = c + λb = 0, d = λa.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
97
§ 12. GRUPPI DI MATRICI
Dato che a2 + b2 = 1 =⇒ (a, b) ̸= (0, 0), il sistema (*) è dunque equivalente al sistema nelle tre variabili
a, b, λ
a(λa) − (−λb)b = 1
2
2
λ(a + b ) = 1
2
2
a
+
b
=
1
⇐⇒
(**)
a2 + b2 = 1
(−λb)2 + (λb)2 = 1
λ=1
⇐⇒
a2 + b2 = 1.
Quindi c = −b e d = a, e la matrice deve avere la forma
[
] [
]
a c
a −b
=
b d
b a
con a2 + b2 = 1.
La proiezione sulle due componenti del primo vettore-colonna della matrice
[
]
a c
7→ (a, b) ∈ R2
b d
è una funzione continua p : SO(2) → R2 , e per quanto visto sopra è iniettiva, ed ha per immagine S 1 ⊂ R2 ,
dato che la circonferenza S 1 ⊂ R2 è definita dall’equazione a2 + b2 = 1. Visto che SO(2) è compatto e R2 è
Hausdorff, la funzione p è un omeomorfismo sull’immagine S 1 ⊂ R2 .
La mappa f : S 1 ⊂ R2 → R4 definita ponendo
[
]
a −b
(a, b) 7→
b a
per ogni (a, b) ∈ S 1 è l’inversa di p (ed è quindi a sua volta un omeomorfismo).
Finiamo osservando che O(2) è suddiviso in due classi: le matrici con determinante 1 e quelle con determinante −1. Le prime, che indichiamo con SO(2)+ = SO(2) e chiamiamo rotazioni, sono esattamente gli
elementi di SO(2). Le seconde, che indichiamo con SO(2)− e chiamiamo riflessioni, sono in corrispondenza
biunivoca con gli elementi di SO(2): se h ∈ SO(2)− è una riflessione fissata, allora per ogni r in SO(2) il
prodotto hr è una riflessione (ha determinante uguale a det (r ) det (h) = det (h) = −1); la mappa r 7→ hr è
iniettiva (hr1 = hr2 =⇒ r1 = r2 ) e suriettiva (h′ ∈ SO(2)− =⇒ h′ = h(hh′ ) = hr con r = hh′ ∈ SO(2)).
Come sopra, si può vedere facilmente che è una funzione continua da un compatto ad un Hausdorff, e quindi
anche SO(2)− ≈ SO(2) ≈ S 1 . L’unione è disgiunta, e possiamo scrivere O(2) = SO(2)+ ∪ SO(2)− ≈ S 1 ∪ S 1 .
(12.12) Esempio. Gruppo delle rotazioni di R3 che fissano l’origine: SO(3). È compatto, connesso e connesso
per archi. Ogni rotazione non banale fissa una e una sola retta.
Dim. Mostriamo prima che esiste una retta fissata. Supponiamo per assurdo che questo non sia vero. Se A ∈
SO(3), allora il polinomio caratteristico p A (λ) ha grado 3, e quindi ha un autovalore reale λ1 con relativo
autovettore v1 . Dato che A ∈ O(3), si ha |Av1 | = |v1 | e dunque |λ1 v1 | = |v1 | =⇒ |λ1 | = 1, cioè λ1 ∈ ±1.
Dato che per ipotesi d’assurdo A non ha autovalore 1, deve essere λ1 = −1. Gli altri due autovalori λ2 e
λ3 sono radici (evantualmente coincidenti) di p A (λ), e non possono essere entrambi uguali a λ1 (altrimenti
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
98
#7. GRUPPI DI TRASFORMAZIONI
det ( A) = (λ1 )3 = −1 ̸= 1). Ci sono due casi: o sono due radici reali, oppure due radici complesse coniugate.
Se sono reali, per lo stesso ragionamento di prima dovrebbero essere uguali a −1, e quindi det ( A) = −1 ̸= 1.
Quindi sono complesse coniugate λ3 = λ2 . Ma allora det A = λ1 λ2 λ2 = −|λ2 |2 ≤ 0 < 1, il che è assurdo.
Quindi almeno un autovalore deve essere uguale a 1.
Il sottospazio vettoriale ortogonale alla retta fissata è un piano, che rimane invariante: è possibile far vedere
che la restrizione di A a questo piano è una rotazione (esercizio), che quindi non fissa altre direzioni.
Per vedere che è connesso e connesso per archi, basta trovare una funzione continua e suriettiva X → SO(3)
β
con X spazio topologico connesso. Questo sarà fatto nell’esercizio (7.31), con X = S 3 . Oppure, se Rαx , Ry e
γ
Rz denotano le rotazioni di angolo α, β e γ attorno ai tre assi di R3 , si può definire la funzione continua
X = S 1 × S 1 × S 1 → SO(3) definita ponendo
(eiα , eiβ , eiγ ) 7→ Rαx Rβy Rzγ .
È continua perché composizione di funzioni continue, ed è suriettiva (si veda il Teorema (12.16) poco sotto).
Oppure, per vedere che è connesso per archi, osserviamo che le rotazioni attorno all’asse z si scrivono come
cos θ − sin θ 0
Rzθ = sin θ cos θ 0
0
0
1
e la funzione θ ∈ R 7→ Rzθ ∈ SO(3) è continua. Se A ∈ SO(3) è una rotazione qualsiasi e x ∈ S 2 tale che
Ax = x, allora esiste certamente una rotazione Q tale che Qe3 = x (perché?), e quindi la rotazione Q−1 AQ
fissa e3 (e3 = (0, 0, 1)), e dunque Q−1 AQ = Rzθ , da cui
A = QRzθ Q−1 .
Ma allora la funzione γ : [0, 1] → SO(3) definita ponendo
γ (t ) = QRztθ Q−1
è continua ed è tale che γ (1) = QRzθ Q−1 = A, e γ (0) = QRz0 Q−1 = I3 . Quindi SO(3) è connesso per archi. ⨳
È vero che O(3) = SO(3)+ ∪ SO(3)− (quelle con det 1 e −1)?
(12.13) Esempio. Gruppo di simmetrie di un triangolo equilatero: è isomorfo al gruppo di permutazioni sui
tre vertici?
(12.14) Esempio. Gruppo ciclico {z ∈ C : zn = 1}: è il gruppo di simmetrie di un poligono regolare? Perché
si chiama ciclico? Perché l’equazione zn = 1 si chiama ciclotomica? Per esempio, il gruppo di simmetrie di un
quadrato? Un esagono?
(12.15) Esempio. Gruppo generato dalle rotazioni di angolo π attorno ai (due) tre assi ortogonali di R3 .
β
γ
(12.16) Teorema. Siano Rαx , Ry e Rz le rotazioni attorno agli assi coordinati di R3 di angolo α, β e γ
rispettivamente. Allora per ogni rotazione R ∈ SO(3) esistono α, β e γ tali che
β γ
R = Rαx Ry Rz ,
cioè R si scrive come prodotto di tre rotazioni attorno agli assi cartesiani.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
§ 12. GRUPPI DI MATRICI
99
Dim. Esercizio (7.29).
⨳
(12.17) Nota. I tre parametri α, β e γ (non esattamente questi) sono anche chiamati gli angoli di Eulero della
rotazione A. Una convenzione abbastanza comune è A = BCD, dove D è una rotazione di angolo ϕ attorno
all’asse z, C una rotazione di angolo θ attorno all’asse x, e B una rotazione di angolo ψ attorno all’asse z
(bastano quindi rotazioni attorno a due assi ortogonali per generare SO(3)).
(12.18) Nota. Una norma è una funzione Rn → R che verifica le seguenti proprietà:
(i) x ̸= 0 =⇒ ∥x∥ > 0, ∥x∥ = 0 ⇐⇒ x = 0.
(ii) ∥cx∥ = |c| ∥x∥.
(iii) ∥x + y∥ ≤ ∥x∥ + ∥y∥.
Una norma su Rn induce una metrica (d ( x, y) = ∥x − y∥), la quale induce a sua volta una topologia.
Diciamo che due norme sono equivalenti se inducono metriche equivalenti, cioè se le topologie ottenute dalla
metriche coincidono (oppure se …). Accade che due norme qualsiasi (che indichiamo con ∥·∥ A e ∥·∥B ) su Rn
sono sempre equivalenti tra di loro:
(12.19) Tutte le norme su Rn sono tra loro equivalenti.
Dimostrazione (opzionale). È sufficiente mostrare che se ∥·∥ A è una norma, allora ∥·∥ A è equivalente alla norma
euclidea ∥·∥.
Infatti, la funzione N : Rn → R definita da N ( x) = ∥x∥ A è continua (rispetto alla norma euclidea): se gli ei
sono i vettori della base standard e xi le componenti di x, si ha per l’omogeneità e la disuguaglianza triangolare
n
n
n
∑
∑
∑
|xi |,
|xi |N ( ei ) ≤ M
N ( x) = N
xi ei ≤
i=1
i=1
i=1
dove M è il massimo degli N ( ei ). Ma |xi |2 ≤ ∥x∥2 per ogni i, e quindi
M
n
∑
|xi | ≤ Mn∥x∥.
i=1
Allora per ogni x e y in Rn si ha che N ( x) = N ( y + ( x − y)) ≤ N ( y) + N ( x − y) =⇒ N ( x) − N ( y) ≤ N ( x − y).
Analogamente N ( y) − N ( x) ≤ N ( x − y), e quindi |N ( x) − N ( y)| ≤ N ( x − y). Dunque
|N ( x) − N ( y)| ≤ N ( x − y) ≤ Mn∥x − y∥,
e quindi N è una funzione continua Rn → R. Consideriamo la sfera
{
}
S = x ∈ Rn : ∥x∥ = 1 ,
che è uno spazio chiuso (controimmagine di {1} chiuso in R) e limitato, e quindi compatto. Ma allora la funzione
N assume un massimo m2 e un minimo m1 su S: per ogni x ∈ S si ha
m1 ≤ N ( x ) ≤ m2 .
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
100
#7. GRUPPI DI TRASFORMAZIONI
Se x1 ∈ S è il punto tale che m1 = N ( x1 ), si ha m1 ̸= 0 dato che x1 ̸= 0, e quindi 0 < m1 ≤ m2 . Ma allora se
x
x ∈ Rn , x ̸= 0, si ha
∈ S, e quindi per ogni x ̸= 0 per l’omogeneità di N
∥x∥
(
)
N ( x)
x
m1 ≤ N
≤ m2 =⇒ m1 ∥x∥ ≤ N ( x) ≤ m2 ∥x∥.
≤ m2 =⇒ m1 ≤
∥x∥
∥x∥
Quindi le due norme sono equivalenti.
⨳
Alcune norme (tutte tra loro equivalenti) sullo spazio delle matrici Matn×n (R) sono per esempio:
∑
(i) (norma di Frobenius) ∥A∥2 = i, j a2i j = Tr (tAA), dove Tr è la traccia della matrice;
(ii) (norma MAX) ∥A∥ = maxi, j |ai j |, dove ai j sono i coefficienti di A;
n
(iii) (norma operatore) ∥A∥ = max{ |Ax|
|x| : x ∈ R ∖ {0}} (quest’ultima a sua volta dipende da una scelta di
n
norma su R ).
(12.20) Nota. Sia A una matrice n × n tale che tAA = I. Se a1 , a2 ,…, an sono i vettori colonna di A, abbiamo
visto nella dimostrazione di (12.10) che
AA = I ⇐⇒ ai · a j = δi j
t
per ogni i, j = 1, . . . , n, dove
1
δi j =
0
se i = j
se i ̸= j
e il prodotto scalare è quello standard ai · a j = tai a j . A cosa corrisponde invece l’equazione AtA = I? Si può
dire che tAA = I =⇒ A(tA) = I?
Osserviamo che se B è l’inversa sinistra di una matrice quadrata A, allora essa ne è anche l’inversa destra,
cioè per matrici quadrate si ha
BA = I ⇐⇒ AB = I.
Ma allora se tA è l’inversa sinistra di A, cioè se la trasposta soddisfa l’equazione tAA = I, è anche l’inversa
destra di A, per cui
t
AA = I =⇒ A(tA) = I.
§ 13.
GRUPPI DI TRASFORMAZIONI
(Cfr.)*
Le matrici, con la moltiplicazione matrice × vettore, inducono trasformazioni lineari (cioè funzioni lineari)
tra spazi vettoriali. Cioè, se L è una matrice n × d con n righe e d colonne, allora la funzione lineare v 7→ Lv è
una funzione
L : Rd → Rn .
* Cfr:
Sernesi, Vol I, Cap 1, §14 [1].
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
101
§ 13. GRUPPI DI TRASFORMAZIONI
Quando n = d, cioè quando la matrice è quadrata, e quando la matrice è invertibile, si tratta quindi di una
trasformazione invertibile
L : Rn → Rn .
Il prodotto di matrici corrisponde alla composizione di funzioni biunivoche. Si può cioè far corrispondere ad
ogni elemento L del gruppo GL(n, R) una funzione biunivoca Rn → Rn , in modo che il prodotto (nel gruppo)
corrisponda alla composizione di funzioni. L’identità del gruppo finisce nella funzione identità.
Vogliamo fare questo in generale: associare ad ogni elemento g di un gruppo astratto G una trasformazione
X → X, cioè una funzione biunivoca su un insieme X, con le due proprietà: 1) l’elemento neutro di G è associato
alla funzione identità 1X : X → X; 2) l’operazione di prodotto nel gruppo corrisponde alla composizione di
funzioni. Osserviamo che se f : X → X è una funzione e x ∈ X, allora è possibile definire la valutazione della
funzione f in x, definita come f ( x ) = f x (era il prodotto matrice per vettore prima). In generale, possiamo
associare ad ogni funzione f : X → X e a ogni elemento x ∈ X la valutazione f ( x ), cioè c’è una funzione
( f , x ) 7→ f ( x ).
Partiamo da qui per definire l’azione di un gruppo su un insieme, cioè una corrispondenza tra gli elementi di
G e le trasformazioni di X in sé.
(13.1) Definizione. Sia G un gruppo e X un insieme. Si dice che G agisce (da sinistra) su X se esiste una
funzione ϕ : G × X → X (la valutazione), denotata da ( g, x ) 7→ g · x = gx, per cui
(i) ∀x ∈ X, 1 · x = x (1 ∈ G è l’elemento neutro).
(ii) ∀x ∈ X, ∀g, h ∈ G, g · (h · x ) = ( gh) · x.
L’insieme X si dice anche G-insieme.
elemento del gruppo g ∈ G
elemento neutro 1 ∈ G
prodotto g1 g2
∼
∼
∼
trasformazione g: X → X
identità 1X : X → X
composizione g1 ◦ g2 : X → X.
Per esercizio verificare che con questa definizione ogni g ∈ G ha associata la funzione x 7→ gx, che è
biunivoca con inversa x 7→ g−1 x. All’elemento neutro 1 ∈ G corridponderà la funzione identità 1X : x 7→ 1x =
x. In questo modo il gruppo non è più astratto, ma è un gruppo di trasformazioni.
(13.2) Esempio.
(i) GL(n, R), GL(n, C).
(ii) Gruppi di permutazioni.
(iii) Gruppi di isometrie (simmetrie di oggetti).
(iv) Ogni gruppo astratto agisce su sé stesso per moltiplicazione/addizione a sinistra.
(v) Ogni sottogruppo H ⊂ G agisce su G per moltiplicazione/addizione (a sinistra).
(13.3) Definizione. Se G agisce su X, allora per ogni x ∈ X si definiscono:
(i) lo stabilizzatore di x: G x = {g ∈ G : g · x = x}.
(ii) L’orbita di x: G · x = {gx : g ∈ G}.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
102
#7. GRUPPI DI TRASFORMAZIONI
(13.4) Sia G un gruppo e X un insieme su cui G agisce. Allora la relazione x ∼ y ⇐⇒ ∃g ∈ G : gx = y è
una relazione di equivalenza, che partiziona X in classi di equivalenza. Le classi di equivalenza sono le orbite
di G in X.
Dim. Per mostrare che la relazione è di equivalenza, bisogna mostrare che è riflessiva, simmetrica e transitiva.
Dato che 1x = x, si ha che x ∼ x, per cui è riflessiva. Inoltre, se gx = y (cioè x ∼ y) allora g−1 ( gx ) = g−1 y, e
quindi x = g−1 y, cioè y ∼ x. Quindi è simmetrica. Infine, è transitiva: se x ∼ y e y ∼ z, si ha che esistono g1 e
g2 per cui g1 x = y e g2 y = z. Quindi ( g1 g2 ) x = g2 ( g1 x ) = g2 y = z, cioè x ∼ z. Ora, è facile vedere che due
punti stanno nella stessa classe di equivalenza se e solo se appertengono alla medesima orbita.
⨳
(13.5) Definizione. L’insieme di tutte le orbite (classi di equivalenza) di X secondo per l’azione di un gruppo
G su X si indica con X/G e si chiama spazio delle orbite.
(13.6) Esempio. Il gruppo (additivo) Z degli interi agisce sulla retta reale R (vedi sotto). Lo spazio quoziente
è omeomorfo alla circonferenza S 1 .
(13.7) Definizione. L’azione di G su X si dice fedele se per ogni g ∈ G, g ̸= 1 ∈ G, la mappa indotta g: X → X
(da x 7→ g · x) non è l’identità 1X : X → X.
(13.8) Definizione. L’azione di G su X viene detta transitiva se per ogni x, y ∈ X esiste g ∈ G per cui g · x = y.
In questo caso si dice che X è uno spazio omogeneo.
(13.9) Esempio. L’azione di Z su R (traslazioni intere) è fedele ma non è transitiva. L’azione di R su R è
fedele e transitiva.
(13.10) L’azione è transitiva se e solo se esiste solo una G-orbita in X.
Dim. Supponiamo l’azione transitiva. Sia x ∈ X un punto fissato. Allora per ogni y esiste g ∈ G per cui
g · x = y, cioè ogni y in X sta nella stessa G-orbita di x, che quindi è unica. Viceversa, supponiamo che esista
una sola orbita: allora esiste x ∈ X per cui {g · x|g ∈ G} = X, e quindi per ogni y ∈ X esiste g ∈ G tale che
g · x = y. Allora, se y1 , y2 ∈ X, esistono g1 , g2 ∈ G tali che g1 x = y1 , g2 x = y2 , e quindi
(
)
y2 = g2 x = g2 g1−1 g1 x = g2 g1−1 y1 ,
cioè y2 = gy1 con g = g2 g1−1 , cioè l’azione è transitiva.
⨳
(13.11) Nota. Se G è un gruppo, G agisce su se stesso X = G semplicemente per moltiplicazione a sinistra.
L’azione è transitiva e fedele. Se H è un sottogruppo di G, anche H agisce su G per moltiplicazione da sinistra.
Le orbite sono i laterali (sinistri) di H in G. La notazione G/H quindi è consistente: da un lato indica l’insieme
(algebrico) dei laterali sinistri di H in G, dall’altro l’insieme delle orbite dell’azione di H su G.
(13.12) Definizione. Se G è un gruppo topologico, allora si dice che G agisce su uno spazio topologico X
se esiste una funzione ϕ : G × X → X che induca una azione di G su X (come nella definizione (13.1)) con
l’ulteriore proprietà che la funzione
G×X → X
è continua. Allora X si chiama G-spazio.
(13.13) Esempio. È facile vedere che R2 agisce su R2 come gruppo (additivo) di traslazioni
( x, y) · (u, v) = ( x + u, y + v).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
103
§ 13. GRUPPI DI TRASFORMAZIONI
(13.14) Esempio. I gruppi GL(n, R), O(n) e SO(n) agiscono su Rn in modo canonico. Come visto sopra, si
può vedere facilmente che l’azione è continua, cioè che agiscono come gruppi topologici su Rn .
(13.15) Definizione. Se G è un gruppo topologico che agisce su uno spazio topologico X, lo spazio delle orbite
X/G è uno spazio topologico con la topologia quoziente.
(13.16) Esempio. In questo esempio, fondamentalmente, ripetiamo parola per parola il ragionamento dell’esempio (8.22), tranne alcune piccole differenze (quali?). Sia G = Z (con la topologia discreta) e X = R. Allora
G agisce su R mediante la somma ( g, t ) 7→ g + t per ogni g ∈ Z e ogni t ∈ R. Lo spazio delle orbite è uguale
allo spazio R/ ∼ dell’esempio (7.1). Mostriamo che è omeomorfo a S 1 = {( x, y) ∈ R2 : x 2 + y2 = 1}. Sia
f : R → R2 la funzione definita da
f (t ) = (cos(2πt ), sin(2πt )).
Si vede subito che induce una funzione f (t ) : R → S 1 ⊂ R2 , e che è continua (le funzioni trigonometriche
sono continue, poi si usa (12.6)). Dal momento che
f ( g + t ) = (cos(2πt + 2gπ ), sin(2πt + 2gπ ))
= (cos(2πt ), sin(2πt ))
= f (t ),
la funzione f induce una funzione sullo spazio delle orbite f¯ : R/Z → S 1 . La funzione indotta f¯ è continua:
infatti, se U ⊂ S 1 è un aperto di S 1 , la sua controimmagine f¯−1 (U ) in R/Z è continua se e soltanto se (per
definizione di topologia quoziente) il sottoinsieme
(
)
p−1 f¯−1 (U ) ⊂ R
è aperto in R, dove p indica la proiezione sul quoziente p : R → R/Z. Ma
(
)
p−1 f¯−1 (U ) = {t ∈ R : f¯ ( p(t )) ∈ U}
= {t ∈ R : f (t ) ∈ U}
= f −1 (U ),
che è aperto, visto che f è continua.
Ora, la funzione indotta f¯ : R/Z → S 1 è iniettiva: se f¯(t1 ) = f¯(t2 ) si ha che cos(2πt1 ) = cos(2πt2 ) e
sin(2πt1 ) = sin(2πt2 ), e quindi t2 = 2kπ + t1 per un certo k ∈ Z, cioè esiste g ∈ Z tale che g · t1 = t2 : i due
punti t1 e t2 appartengono alla stessa G-orbita. È facile vedere che f¯ è suriettiva. Osserviamo che l’inclusione
[0, 1] ⊂ R è una funzione continua, e quindi la composizione [0, 1] → R → R/Z è anch’essa una funzione
continua, e suriettiva. Quindi la sua immagine R/Z, per (8.17), è un compatto. Ora, f¯ è una funzione continua
e biunivoca da un compatto ad uno spazio di Hausdorff (S 1 ), e quindi un omeomorfismo per (8.19).
(13.17) Esempio. Sia G = Z2 ⊂ R2 il reticolo degli interi (h, k ) ∈ R2 . Allora R2 /G è omeomorfo a S 1 × S 1 .
Sappiamo dall’esempio precedente che R/Z ≈ S 1 . Per prima cosa mostriamo che la funzione
f : R2 /Z2 → R/Z × R/Z ≈ S 1 × S 1
definita da
( x, y) + Z2 7→ ( x + Z, y + Z)
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
104
#7. GRUPPI DI TRASFORMAZIONI
è ben posta. Se ( x ′ , y′ ) + Z2 = ( x, y) + Z2 ∈ R2 /Z2 , allora per definizione x ′ − x ∈ Z e y′ − y ∈ Z, e quindi
x + Z = x ′ + Z e y + Z = y′ + Z. È iniettiva: se ( x + Z, y + Z) = ( x ′ + Z, y′ + Z), allora x − x ′ ∈ Z e
y − y′ ∈ Z, e quindi ( x ′ , y′ ) + Z2 = ( x, y) + Z2 ∈ R2 /Z2 . Analogamente si può mostrare che è suriettiva.
Dimostriamo che è continua: denotiamo con P : R2 → R2 /Z2 la proiezione sul quoziente e con p × p la
mappa p × p : R × R → R/Z × R/Z (che è continua). Se U ⊂ R/Z × R/Z è un aperto, allora ( p × p)−1 (U )
è aperto in R × R, e quindi è aperto in R2 (che è identificato con R × R tramite la mappa f˜ : R2 → R × R
che induce f ). Ma il sottoinsieme di R2 dato da f˜−1 ( p × p)−1 (U ) coincide con P−1 ( f −1 (U )), che quindi è
aperto. Ora, per definizione di topologia quoziente f −1 (U ) è aperto se e solo se P−1 (U ) è aperto in R2 , e
quindi f −1 (U ) è aperto. Di nuovo, una funzione biunivoca da uno spazio compatto ad uno spazio di Hausdorff
è un omeomorfismo. Lo spazio S 1 × S 1 è chiamato toro.
(13.18) Esempio. Si consideri l’azione di SO(2) sulla circonferenza unitaria S 1 . Ogni elemento di SO(2)
agisce ruotando la circonferenza su se stessa: ogni punto ha stabilizzatore banale e l’azione è transitiva e
fedele. Fissiamo e0 = (1, 0) ∈ S 1 . L’orbita di e0 è tutto S 1 , e quindi c’è una funzione continua
f : SO(2) → S 1
definita da f ( g) = g · e0 . L’azione è transitiva, e quindi f è suriettiva. Inoltre lo stabilizzatore è banale, e quindi
f è iniettiva. Dato che SO(2) è compatto e S 1 di Hausdorff, f è un omeomorfismo tra SO(2) e S 1 .
(13.19) Esempio. Consideriamo ora l’azione di SO(3) su S 2 (la sfera di dimensione 2, centro nell’origine e
raggio 1, contenuta in R3 ). L’azione è ancora transitiva (perché?), fedele, ma ogni punto ha uno stabilizzatore
non banale (cosa sono le rotazioni di R3 che fissano un punto?). Si veda l’esercizio (7.29).
(13.20) Esempio. Il gruppo Z/2Z agisce su S 2 ponendo g · x = −x.
(13.21) Esempio. Le isometrie di uno spazio metrico X costituiscono un gruppo topologico che agisce su X.
Quali sono le isometrie di R? Le isometrie di C ∼
= R2 ? Di R3 ?
(13.22) Esempio. Ogni numero complesso a + ib non nullo può essere interpretato come vettore di R2 con
coordinate (a, b) (piano di Argand–Gauss), ma anche come elemento di GL(2, R), come segue. Definiamo
l’azione, per G = C ∖ {0} e X = C,
( g, w) 7→ gw
con g ∈ G = C ∖ {0} e w ∈ C ∼
= R2 . Per ogni g ∈ G, l’applicazione indotta g: X → X è R-lineare, e quindi c’è
una funzione f : G → GL(2, R). Osserviamo che f ( g1 + g2 ) = f ( g1 ) + f ( g2 ) e f ( g1 g2 ) = f ( g1 ) f ( g2 ) e che
se c ∈ R e g ∈ C si ha f (cg) = c f ( g) (qui teniamo conto anche degli elementi non invertibili). La funzione f
è anche iniettiva: f ( g1 ) = f ( g2 ) =⇒ g1 = g2 . Se g1 = 1 ∈ R ⊂ C, allora
[
]
1 0
f ( g1 ) = f (1) =
.
0 1
Se g2 = i ∈ C, allora per ogni w = w1 + iw2 ∈ C si ha
][ ]
0 −1 w1
,
g2 w = i (w1 + iw2 ) = iw1 − w2 = −w2 + iw1 =
1 0 w2
cioè
[
]
0 −1
.
f ( g2 ) = f (i ) =
1 0
[
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
105
§ 13. GRUPPI DI TRASFORMAZIONI
Dunque, per l’additività se z = a + ib ∈ C, si ha
]
] [
]
[
1 0
0 −1
a −b
f (z ) = f (a + ib) = a f (1) + b f (i ) = a
+b
=
.
0 1
1 0
b a
[
]
a −b
In questo modo, le rotazioni (che si scrivono come
con a2 + b2 = 1) corrispondono mediante la f ai
b a
numeri complessi di norma 1. Il prodotto di numeri complessi corrisponde al prodotto di matrici, la somma di
numeri complessi, alla somma di matrici.
Il coniugato del numero complesso z = a + ib è z = a − ib, dunque
[
[
]
a b
f (z ) =
= [ f (z )]t ,
−b a
cioè la trasposta di
[
]
a −b
f (z ) =
.
b a
La norma di un numero complesso z = a + ib è data da |z|2 = a2 + b2 , che è anche
zz = (a + ib)(a − ib) = a2 − (ib)2 = a2 + b2 .
Tra matrici, si ha
[
][
]
[
]
a −b a b
2
2 1 0
f (z ) f (z ) = f (z ) f (z ) =
= (a + b )
.
b a −b a
0 1
t
Per ogni numero complesso z ∈ C, sia
ez =
∞ n
∑
z
n=0
n!
.
Dato che |zn | = |z|n , è una serie in C convergente (le serie parziali delle norme convergono e quindi …).
Osserviamo che
∞
∞
∑ zn ∑
wm
z w
e e =
n! m=0 m!
n=0
∞ ∑
∑
zn wm
=
n!m!
k=0 n+m=k
k
∞
j wk− j
∑
∑
k!
z
=
k!
j!
(
k
−
j
)
!
k=0 j=0
( )
k
∞
∑
1 ∑ k j k− j
z w
=
k! j=0 j
k=0
=
∞
∑
1
(z + w)k
k!
k=0
= ez+w
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
106
#7. GRUPPI DI TRASFORMAZIONI
e che
ez = (ez )
e0 = 1.
Quindi
|eiθ |2 = eiθ e−iθ = e0 = 1,
cioè eiθ è un punto della circonferenza unitaria in C. In altre parole, la mappa
R 7→ {a + ib ∈ C : a2 + b2 = 1} ⊂ C,
definita da θ 7→ eiθ è ben definita. Ricordiamo che*
eiθ = cos θ + i sin θ,
quindi
cos θ = ℜ(eiθ ) =
∞
∑
(−1)k
k=0
sin θ = ℑ(eiθ ) =
∞
∑
(−1)k
k=0
dato che
eiθ =
θ 2k+1
(2k + 1)!
∞
∑
(iθ )n
n=0
=
θ 2k
(2k )!
n!
∞
∑
∞
∑
(iθ )n
(iθ )n
+
n!
n!
n=0, n pari
n=1, n dispari
∞
∑
∑
θ 2k
θ 2k+1
=
+
(i )
(i )2k+1
(2k )! k=0
(2k + 1)!
k=0
∞
∑
∞
2k
∞
∑
θ 2k
θ 2k+1
=
(−1)
+i
(−1)k
(2k )!
(2k + 1)!
k=0
k=0
k
= cos θ + i sin θ.
Cioè, con un abuso di notazione,
]
cos θ − sin θ
.
e = cos θ + i sin θ =
sin θ cos θ
[
iθ
Moltiplicare per eiθ un punto del piano complesso significa ruotarlo attorno all’origine in senso antiorario di
un angolo θ.
(13.23) La funzione esponenziale z 7→ ez , C → C è continua.
* Questa
potrebbe essere una definizione delle funzioni trigonometriche cos e sin.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
107
§ 13. GRUPPI DI TRASFORMAZIONI
Dimostrazione (opzionale). Se z ∈ C, allora*
e −1 =
z
=
∞ n
∑
z
n!
−1
n=0
∞ n
∑
z
=z+
n!
n=1
∞
∑
= z(
n=0
z2 z3
+ +...
2! 3!
zn
)
(n + 1) !
=⇒ ez − 1 = zr (z )
dove se |z| < 1 il resto r (z ) verifica
r (z ) =
∞
∑
n=0
zn
(n + 1) !
=⇒ |r (z )| ≤
∞
∑
n=0
=⇒ |ez − 1| ≤
∑
1
|z|n
≤
|z|n =
.
1 − |z|
(n + 1)! n=0
∞
|z|
.
1 − |z|
In conseguenza dell’ultima disuguaglianza, la funzione C → C definita da z 7→ ez è continua: se z0 ∈ C e
ϵ > 0, definiamo
ϵ
> 0.
δ := z
|e 0 | + ϵ
Segue che per ogni h ∈ C con |h| < δ si ha
|h|
1−|h|
<
δ
1−δ
e quindi
|ez0 +h − ez0 | = |ez0 eh − ez0 | = |ez0 ||eh − 1| ≤
δ
|h|
< |ez0 |
=
≤ |ez0 |
1 − |h|
1−δ
|ez0 |ϵ
ϵ
|ez0 | + ϵ
|ez0 | + ϵ
=
= |ez0 |
= ϵ.
z
ϵ
|e 0 | + ϵ − ϵ
1− z
|e 0 | + ϵ
|ez0 | + ϵ
e quindi z 7→ ez è continua in z0 ∈ C.
⨳
Di conseguenza anche cos θ e sin θ sono funzioni continue di θ.
(13.24) Nota (Opzionale). A questo punto dovremmo essere però finalmente in grado di dimostrare che le
funzioni trigonometriche cos e sin, definite a partire da eit , sono periodiche di periodo 2π. Procediamo nel
modo seguente. Sia X ⊂ R definito da
X = {t ∈ R : eit = 1}.
* Si
può usare la proprietà distributiva di C anche per somme infinite?
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
108
#7. GRUPPI DI TRASFORMAZIONI
Si ha e0 = 1 =⇒ 0 ∈ X, e t1 , t2 ∈ X =⇒ t1 + t2 ∈ X, −t1 ∈ X, cioè X è un sottogruppo (additivo) di R,
nonché un sottospazio chiuso di R (perché controimmagine del chiuso {1} ⊂ C mediante la funzione continua
z 7→ ez ). Ci sono altri elementi in X oltre a 0? Ora, osserviamo che cos 0 = 1, mentre, dato che la successione
4k
converge a zero monotonamente (dimostrarlo per induzione!), risulta
(2k )!
cos 2 =
∞
∑
(−1)k
k=0
4k
(2k )!
4 42 43
+
−
+...
2 4! 6!
1
42
= − < 0.
< 1−2+
4!
3
= 1−
Per il teorema degli zeri esiste quindi almeno un t0 ∈ (0, 2) tale che cos t0 = 0. In modo analogo,
cos 1 =
∞
∑
(−1)k
k=0
1
(2k )!
1 1 1
+ − +...
2 4 6
1 1
> 1 − = > 0,
2 2
= 1−
e quindi esiste t0 ∈ (1, 2) tale che cos t0 = 0. Ora, se cos t0 = 0, allora sin2 t0 = 1. Ma, sempre per la monotonia,
si può mostrare che per t ∈ (0, 2) si ha
t3
sin t > t − ,
6
2
t
e quindi sin t0 > 0, dato che t (1 − ) è positiva per t ∈ (0, 2), cioè non può essere sin t0 = −1, e dunque
6
sin t0 = 1.
Abbiamo dimostrato che eit0 = i, da cui segue che
e4t0 i = i 4 = 1.
cioè che 4t0 ∈ X, e che perciò X non è il sottogruppo banale di R. Sia quindi
t1 = inf{t > 0 : t ∈ X}.
Questo numero esiste certamente, perché è l’estremo inferiore di un insieme non vuoto (4t0 verifica e4it0 = 1)
e limitato dal basso. Può essere uguale a zero, t1 = 0? Supponiamo che lo sia. Allora per ogni ϵ > 0 esiste
t > 0, tale che t ∈ X e t < ϵ . Ma X è sottogruppo, e quindi per ogni k ∈ Z si ha kt ∈ X, cioè per ogni x ∈ R ci
sono elementi di X ad una distanza al più ϵ . In altre parole,
X = R.
Ma dato che X è chiuso, si avrebbe X = X = R, cioè per ogni t ∈ R
eit = 1.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
109
§ 13. GRUPPI DI TRASFORMAZIONI
Ma questo è falso: basta prendere t0 e usare le identità di sopra.
Quindi t1 non può essere uguale a 0: definiamo una costante π > 0 dalla relazione
2π = t1 .
In altre parole, 2π è il più piccolo numero reale positivo per cui eit = 1, e ovviamente risulta per ogni k ∈ Z
e2kπi = (e2πi )k = 1k = 1.
Da cioè segue che le funzioni cos t e sin t sono periodiche di periodo almeno 2π (potrebbe essere un sottomultiplo di 2π, a priori):
ei (t+2kπ ) = eit e2kπi = eit .
Non solo, vale anche il viceversa: se t ∈ X, allora t = 2kπ. Infatti, se così non fosse esisterebbe t ∈ X, tale che
2kπ < t < 2(k + 1)π
per un certo k ∈ Z, ma allora se si pone s = t − 2kπ si ha s > 0, s < 2π e
eis = ei (t−skπ ) = eit = 1,
cioè non è vero che 2π è il minimo, e questo è assurdo. Deve quindi essere
X = {t ∈ R : eit = 1} = {2kπ : k ∈ Z}.
Ancora: osserviamo che i due insiemi
A = {t ∈ R : t > 0, eit = 1},
B = {t ∈ R : t > 0, eit = i}
sono legati da
4B ⊂ A =⇒ inf A ≤ 4 inf B.
Inoltre, (1, 2) ∋ t0 ∈ B =⇒ B ̸= ∅ e inf B > 0 dato che e0 ̸= i, e inf B < 2 per quanto visto sopra. Poniamo
quindi b = inf B, che quindi deve verificare
(13.25)
2π ≤ 4b.
Per come abbiamo definito b poco sopra, però, è anche il più piccolo reale positivo tale che cos b = 0, da cui
segue (senza assumerlo) che sin b = 1. Ora, per definizione se t ∈ (0, b) allora cos t > 0 (dato che cos 0 > 0 e
t3
la funzione non può cambiare di segno nell’intervallo), e sin t > 0 dato che sin t > t − 3!
, da cui segue che se
t ∈ (0, b] allora cos t ̸= 1. Ma
cos(t + b) + i sin(t + b) = ei (t+b) = eit eib = ieit = i cos t − sin t,
e dunque
cos(t + b) = − sin t = sin(−t )
sin(t + b) = cos t = cos(−t ).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
110
#7. GRUPPI DI TRASFORMAZIONI
Segue che
cos(t + 2b) = − sin(t + b) = − cos t
sin(t + 2b) = cos(t + b) = − sin t
cos(t + 3b) = − cos(t + b) = sin(t )
sin(t + 3b) = − sin(t + b) = − cos t.
Quindi nell’intervallo [0, 4b] può accadere che cos t = 1 e sin t = 0 solo se t = 0 oppure t = 4b: cos t è negativo
in [b, 3b], sin t è non nullo in (0, b] e [3b, 4b). Ma allora non può essere 2π < 4b nella formula (13.25), perché
per definizione cos 2π = 1 e sin 2π = 0: deve essere 2π = 4b, cioè b = π2 , e dunque
π
ei 2 = i.
Prendiamo i quadrati di entrambi i membri e li sommiamo: otteniamo l’identità di Eulero*
eiπ + 1 = 0.
* (Dalla
pagina di wikipedia sull’identità di Eulero)
A reader poll conducted by Mathematical Intelligencer named the identity as the most beautiful theorem in mathematics. Another
reader poll conducted by Physics World in 2004 named Euler’s identity the ”greatest equation ever”, together with Maxwell’s equations.
The book Dr. Euler’s Fabulous Formula [2006], by Paul Nahin (Professor Emeritus at the University of New Hampshire), is devoted
to Euler’s identity; it is 400 pages long. The book states that the identity sets ”the gold standard for mathematical beauty.”
Constance Reid claimed that Euler’s identity was ”the most famous formula in all mathematics.”
Gauss is reported to have commented that if this formula was not immediately apparent to a student on being told it, the student
would never be a first-class mathematician.
After proving the identity in a lecture, Benjamin Peirce, a noted nineteenth century mathematician and Harvard professor, said, ”It
is absolutely paradoxical; we cannot understand it, and we don’t know what it means, but we have proved it, and therefore we know it
must be the truth.”
Stanford mathematics professor Keith Devlin says, ”Like a Shakespearean sonnet that captures the very essence of love, or a painting
that brings out the beauty of the human form that is far more than just skin deep, Euler’s equation reaches down into the very depths
of existence.”
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
111
Esercizi
ESERCIZI
(7.1) Sia G un gruppo e H ⊂ G un sottogruppo. L’insieme G/H è definito come l’insieme di tutti i laterali,
cioè di tutti gli insiemi del tipo {gh : h ∈ H} per qualche g (fissato) in G. Equivalentemente, sia ∼H la relazione
in G definita da: x ∼H y ⇐⇒ x −1 y ∈ H. Dimostrare che la relazione ∼H è di equivalenza, e che le classi di
equivalenza sono proprio i laterali di H in G.
(7.2) Dimostrare che GL(n, R) non è limitato.
2
(7.3) Si scriva la funzione GL(n) → GL(n) ⊂ Rn definita da A 7→ AAt (dove At indica la trasposta di A)
come composizione di funzioni continue.
(7.4) Sia G un gruppo topologico e H ⊂ G un sottogruppo. Dimostrare che la chiusura H di H in G è anch’esso
un sottogruppo.
(7.5) Dimostrare che Z è un sottogruppo topologico (rispetto alla somma) di R.
(7.6) È vero che Q è un sottogruppo topologico (rispetto alla somma) di R?
(7.7) Dimostrare che GL(n) e O(n) non sono connessi. (Suggerimento: utilizzare il teorema (11.12) con la
mappa determinante)
*(7.8) Dimostrare che se S ⊂ R è un sottogruppo discreto (nel senso che ha la topologia discreta), allora è
isomorfo a Z (cioè è un gruppo ciclico infinito).
(7.9) Sia nZ ⊂ Z il sottogruppo (additivo) di tutti i multipli di un intero n ∈ N. L’azione da sinistra g · x =
g + x fa agire G = nZ su Z. L’azione è fedele? È transitiva? Cosa è l’insieme delle classi di equivalenza?
(7.10) Mostrare che il quoziente R2 /Z2 è compatto.
*(7.11) Trovare un gruppo G che agisca sulla striscia X = {( x, y) : y2 ≤ 1} ⊂ R2 tale che X/G sia omeomorfo
al cilindro S 1 × [0, 1].
*(7.12) Trovare un gruppo G che agisca sulla striscia X = {( x, y) : y2 ≤ 1} ⊂ R2 tale che X/G sia omeomorfo
al nastro di Möbius.
*(7.13) Si consideri S 2 con l’azione antipodale di G = Z2 (gruppo di due elementi) data da g · x = −x se g ̸= 1.
Che cosa è S 2 /G? È compatto? È connesso?
(7.14) Trovare un’azione sul toro che abbia come spazio quoziente un cilindro.
(7.15) Dimostrare che lo stabilizzatore di un punto x ∈ X rispetto ad un’azione di un gruppo topologico G è
un sottogruppo chiuso di G.
(7.16) Si consideri il gruppo G generato da una rotazione nel piano di angolo θ, che agisce sulla circonferenza
S 1 = {( x, y) : x 2 + y2 = 1} ⊂ R2 . Studiare, al variare di θ, la topologia dello spazio quoziente S 1 /G.
(7.17) Siano r1 e r2 riflessioni lungo due rette passanti per l’origine in R2 . Mostrare che la composizione r1r2
è una rotazione.
*(7.18) Sia G = Q e X = R, con azione data da g · x = g + x per ogni g ∈ Q e x ∈ R. Dimostrare che è
un’azione di gruppo topologico. È transitiva? Lo spazio quoziente X/G è di Hausdorff?
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
112
#7. GRUPPI DI TRASFORMAZIONI
(7.19) Si consideri l’azione di GL(1) = R ∖ {0} su R data dalla moltiplicazione g · x = gx. Quali sono le
orbite?
(7.20) Sia G = R (gruppo additivo) e X = R2 , con azione data da g · ( x, y) = ( g + x, g + y) per ogni g ∈ G e
ogni ( x, y) ∈ X. Che cosa è lo spazio delle orbite?
(7.21) Consideriamo la stessa azione dell’esercizio precedente. Che cosa è lo spazio delle orbite per l’azione
di Z ⊂ G = R su X? È compatto? È connesso? È Hausdorff?
(7.22) Quanti elementi ha il gruppo di simmetrie G di un quadrato Q in R2 ? Che cosa è (cioè, descriverlo
esplicitamente) lo spazio quoziente Q/G.
(7.23) Sia X uno spazio su cui un gruppo topologico X agisca in modo transitivo. Dimostrare che lo spazio
è “omogeneo”, cioè per ogni coppia di punti c’è un omeomorfismo f : X → X che manda x in y (cioè un
“cambio di coordinate” che manda x in y). Rispetto a quale gruppo R è omogeneo? E Rn ?
(7.24) Trovare un gruppo topologico che agisca in modo transitivo su O(n). Più in generale, se G è un gruppo
topologico e H ⊂ G un sottogruppo, determinare un gruppo che agisce transitivamente sullo spazio quoziente
G/H.
*(7.25) Dimostrare che se G è un gruppo topologico che agisce su uno spazio X, allora la proiezione sullo
spazio delle orbite X → X/G è una mappa aperta. Se G è finito, è anche chiusa. (Suggerimento: se U ⊂ X è
un aperto, allora p(U ) è aperto (chiuso) se e solo se GU = {g · x : g ∈ G, u ∈ U} è aperto (chiuso) in X.)
(7.26) Dimostrare che se G (gruppo topologico) agisce su X, allora per ogni g ∈ G la mappa x 7→ g · x è un
omeomorfismo.
**(7.27) Sia G un gruppo topologico d N ◁ G un suo sottogruppo normale (dal punto di vista algebrico) e chiuso
(dal punto di vista topologico) in G. Sia G/N il quoziente (quoziente dal punto di vista algebrico, insieme dei
laterali), con la topologia quoziente.
(i) Dimostrare che la proiezione p × p : G × G → G/N × G/N è una mappa quoziente.
(ii) Dimostrare che la moltiplicazione G × G → G induce una moltiplicazione m̄ : G/N × G/N → G/N, che
è continua.
(iii) Dimostrare che G/N è un gruppo topologico.
(7.28) Sia l ≥ 2 un intero. Sia Zl ⊂ C l’insieme delle radici l-esime dell’unità Zl = {z ∈ C : zl = 1}. Dimostrare
che Zl è un gruppo topologico, che agisce su C per moltiplicazione a sinistra g · z = gz (g ∈ Zl , z ∈ C). Al
variare di l, determinare lo spazio quoziente C/Zl .
(7.29) (La sfera di Rubik) Sia G = SO(3) che agisce su S 2 ⊂ R3 (sfera di raggio uno in R3 e centro in 0 ∈ R3 ).
Dimostrare le seguenti affermazioni.
(i) L’azione di G su S 2 è transitiva.
−−→
(ii) Per ogni x ∈ S 2 e ogni g ∈ G tale che gx = x, g ruota il piano ortogonale al vettore Ox in sé.
(iii) Per ogni x ∈ S 2 , lo stabilizzatore G x ∼
= SO(2).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
113
Esercizi
(iv) Per ogni x, y ∈ S 2 , il sottospazio G x,y = {g ∈ G : gx = y} ⊂ G è non vuoto ed è omeomorfo a G x
mediante la mappa g ∈ G x,y 7→ g1−1 g ∈ G x , dove g1 ∈ G x,y è un elemento fissato.
(v) Lo spazio di tutti gli assi di rotazione degli elementi di G x,y , per x ̸= y, descrive un cerchio massimo in
S2 .
−−→ −→
(vi) Se x, y ∈ S 2 e Ox · Oy = 0 (sono ortogonali), allora per ogni P ∈ S 2 esiste una rotazione g ∈ G che fissa
−−−→ −→
−−→ −→
x (gx = x) e tale che OgP e Oy sono ortogonali (è vero anche se Ox e Oy non sono ortogonali?).
−−→ −→
(vii) Se x e y sono due punti di S 2 tali che Ox e Oy sono ortogonali, allora per ogni P ∈ S 2 esistono due
−−→ −→
rotazioni Rx e Ry attorno a x e y rispettivamente tali che Ry Rx P è ortogonale ad entrambi Ox e Oy.
(viii) Se vettori ei sono i tre vettori della base standard di R3 e e′i = Rei le rispettive immagini mediante una
rotazione R ∈ SO(3), allora esistono tre rotazioni Ri attorno a ei tali che:
R3 R2 R1 e′3 = e3
R3 R2 R1 e′2 = e2
R3 R2 R1 e′1 = e1 .
(ix) Dimostrare il teorema (12.16) (pagina 98): ogni rotazione in SO(3) si può scrivere come prodotto R =
β γ
Rαx Ry Rz di tre rotazioni attorno agli assi coordinati di R3 .
Ricordiamo che se A è una matrice n × n a coefficienti complessi, allora la trasposta coniugata (aggiunta
Hermitiana) di A si indica con A∗ ed è la matrice con coefficienti ā ji , se ai j sono i coefficienti di A. Per ogni
intero n ≥ 1 siano U (n) (gruppo delle matrici unitarie/gruppo unitario) e SU (n) (gruppo speciale uniterio) i
gruppi di matrici definiti da
U (n) = {A ∈ GL(n, C) : AA∗ = A∗ A = In },
SU (n) = {A ∈ U (n) : det A = 1}.
*(7.30) Siano U (n) e SU (n) il gruppo unitario e il gruppo speciale unitario. Dimostrare i seguenti fatti.
(i) Per ogni intero n ≥ 1 i gruppi U (n) e SU (n) sono compatti.
(ii) U (1) ≈ S 1 ≈ SO(2).
[
]
z −w̄
(iii) Gli elementi di SU (2) sono tutte e sole le matrici del tipo A =
con (z, w) ∈ C2 , |z|2 + |w2 | = 1.
w z̄
[
]
[
]
[
]
[
]
1 0
i 0
0 1
0 i
(iv) Siano 1 =
,i=
,j=
, k = ij =
∈ SU (2). Allora se z = a + ib, w = c + id
0 1
0 −i
−1 0
i 0
si ha
]
[
z w
= a1 + bi + c j + d k.
−w̄ z̄
(Per a, b, c, d ∈ R, i numeri che si scrivono come a1 + bi + c j + d k, che corrispondono a coppie di
numeri complessi (z, w), costituiscono l’algebra H dei quaternioni — di Hamilton. In un certo senso
sono la “complessificazione” dei numeri complessi: così come i numeri complessi sono coppie di numeri
reali con somma e prodotto, i quaternioni sono coppie di numeri complessi con somma e prodotto. In
questo caso il prodotto non è commutativo, però. Gli elementi i, j e k di H sono un po’ come le unità
immaginarie.)
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
114
#7. GRUPPI DI TRASFORMAZIONI
(v) SU (2) ≈ S 3 (rivedere la dimostrazione SO(2) ≈ S 1 ).
*(7.31) Continuando dall’esercizio precedente, mostrare le seguenti proposizioni.
(i) i j = k = − ji, j k = i = −k j, ki = j = −i k, i 2 = j 2 = k2 = −1.
(ii) Se per ogni matrice del tipo X = a1 + bi + c j + d k si pone X̄ = a1 − bi − c j − d k, allora ( XY ) = (Ȳ )( X̄ ),
e
X X̄ = a2 + b2 + c2 + d 2 =: |X|2
(quest’ultima uguaglianza è una definizione).
Segue che |XY |2 = |X|2 |Y |2 .
(iii) Per ogni (a, b, c, d ) ̸= (0, 0, 0, 0) ∈ R4 la matrice inversa di X = a1 + bi + c j + d k è uguale a X̄/|X|2 =
(a1 − bi − c j − d k)/(a2 + b2 + c2 + d 2 ).
(iv) Si consideri la funzione M : R3 → Mat2×2 (C) definita ponendo
M ( v) = M v = v1 i + v2 j + v3 k.
per ogni vettore v ∈ R3 di componenti vi , e H ⊂ Mat2×2 (C) la sua immagine. Si mostri che H è il
sottospazio di Mat2×2 (C) di tutte le matrici Hermitiane a traccia nulla.
(v) Per ogni A ∈ SU (2) la funzione L A : H → H definita ponendo
L A ( X ) = AX A−1
è ben definita e lineare in X rispetto alla somma di matrici (osservare che X ∈ H se e solo se la traccia
della matrice X è nulla e la traccia …).
(vi) Per ogni A ∈ SU (2) la funzione L A : H → H, tramite la corrispondenza M, è una funzione lineare
invertibile R3 → R3 , cioè induce un elemento ρ A ∈ GL(3, R).
(vii) Per ogni A ∈ SU (2), l’elemento ρ A del punto precedente è un elemento di O(3) (basta mostrare che ρ A
conserva la norma).
(viii) La funzione A 7→ det (ρ A ) è una funzione continua SU (2) ≈ S 3 → {−1, 1} = S 0 . Dedurre che per ogni
A ∈ SU (2), si ha ρ A ∈ SO(3).
(ix) La funzione continua A 7→ ρ A è anche un omomorfismo di gruppi π : SU (2) → SO(3).
(x) Il nucleo di π è uguale all’insieme di tutti gli elementi A = a1 + bi + c j + d k ∈ SU (2) tali che
Ai = iA, A j = jA, Ak = kA,
e quindi ker π = {−1, 1}.
(xi) Le immagini mediante π in SO(3) dei tre sottogruppi
G i = {A ∈ SU (2) : Ai = iA} = {a + bi}
G j = {A ∈ SU (2) : A j = jA} = {a + c j}
G k = {A ∈ SU (2) : Ak = kA} = {a + d k}
sono i gruppi di rotazioni di SO(3) che fissano uno degli assi cartesiani di R3 (osservare per esempio
che se A = 1 cos θ + i sin θ ∈ SU (2), allora ρ A è la rotazione attorno al primo asse di R3 di angolo 2θ).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
115
Esercizi
(xii) Se B ∈ SU (2) è a traccia nulla B = b1 i + b2 j + b3 k, allora B2 = −1;
(xiii) Se B, C ∈ SU (2) sono come sopra a traccia nulla, allora BC + CB = 0 se e soltanto se i due vettori
corrispondenti in H sono ortogonali (rispetto al prodotto scalare standard di R3 , con l’identificazione
mediante M).
(xiv) Se B ∈ SU (2) è come sopra a traccia nulla, allora esistono esistono C, D ∈ SU (2) a traccia nulla tali che
BC = D, CD = B, DB = C, C 2 = D2 = −1, BC + BC = 0, BD + DB = 0, CD + DC = 0 (si scelgano due
vettori unitari in H che costituiscano, insieme a B, una base ortonormale in H, coerentemente orientata).
(xv) Se A = 1 cos θ + B sin θ, con B ∈ SU (2) del tipo B = bi + c j + d k, allora ρ A è una rotazione che fissa
(b, c, d ) ∈ R3 , di angolo 2θ (si consideri una base come nel punto precedente …).
(xvi) L’omomorfismo π : S 3 ≈ SU (2) → SO(3) è suriettivo ed è una mappa quoziente, dunque
SU (2)/ ker π = SU (2)/{±1} ≈ SO(3),
e SO(3) è connesso.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
116
#7. GRUPPI DI TRASFORMAZIONI
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
Settimana N° 8
SPAZI AFFINI
§ 14.
SPAZI AFFINI
(Cfr.)*
Sappiamo come è definita l’azione di un gruppo G su un insieme e l’azione di un gruppo topologico su uno
spazio topologico. Ricordiamo anche che cosa è uno spazio vettoriale su un campo K (per esempio, K = R,
K = C).
(14.1) Definizione. Uno spazio vettoriale V è un gruppo abeliano (additivo) su cui il campo degli scalari
K “agisce”; l’azione di un campo K su un gruppo abeliano è data in termini di una legge di composizione
(“prodotto per uno scalare”)
(k, v) ∈ K × V 7→ kv ∈ V
con le proprietà seguenti.
(i) Per ogni k ∈ K la funzione indotta v ∈ V 7→ kv ∈ V è un omomorfismo del gruppo additivo V (cioè è
additiva, manda lo zero nello zero, …)
(ii) Per ogni k1 , k2 ∈ K, v ∈ V :
(a) (k1 + k2 ) v = k1 v + k2 v,
(b) (k1 k2 ) v = k1 (k2 v)
(iii) 1v = v.
(14.2) Esempio. Sia Rn il prodotto diretto di n copie di R. Ha per elementi le n-uple di numeri reali, ed è un
gruppo additivo rispetto alla somma componente per componente. Il prodotto di uno scalare per una n-upla è il
modello di prodotto di scalare per vettore più in generale. Infatti, in molti contesti non si distingue il concetto
di vettore (riga o colonna) dal concetto di n-upla.
* Cfr:
Nacinovich, Cap V, §1 [2].
117
118
#8. SPAZI AFFINI
L’idea di spazio affine è l’applicazione della omogeneità degli spazi vettoriali (vedi definizione (13.8))
rispetto al gruppo delle traslazioni: a meno di traslazioni, gli intorni dei punti Rn sono gli stessi.* Si può dire
che uno spazio affine è uno spazio che localmente è come uno spazio vettoriale, e dati due punti c’è ben definita
una unica trasformazione (traslazione) che manda un punto nell’altro (trasporto parallelo). Vedremo poi come
da questa idea si deducono i concetti di parallelismo e incidenza.
(14.3) Definizione. Uno spazio affine X su un campo K è un insieme X (insieme di punti) su cui agisce in
→
−
modo fedele e transitivo uno spazio vettoriale X su K (considerato solo come gruppo additivo – cioè come
→
−
il gruppo delle traslazioni). Gli elementi di X si chiamano punti, gli elementi di X si dicono vettori affini o
traslazioni, e il campo K viene detto campo dei coefficienti.
→
−
(14.4) Sia X uno spazio affine e X lo spazio vettoriale (su campo K) associato. Allora esiste (unica) una
→
−
−−→
−−→
funzione X × X → X , indicata da ( A, B) 7→ AB (indicato anche come AB = B − A), con le seguenti proprità:
→
−
−−→
(i) ∀A ∈ X, ∀v ∈ X , ∃ unico B ∈ X : AB = v.
−−→ −−→ −−→
(ii) ∀A, B, C ∈ X, AB + BC = AC.
→
−
→
−
Dim. L’azione di X su X è per definizione transitiva: dunque per ogni scelta di A e B in X esiste v ∈ X tale che
→
−
→
−
v + A = B. Ora, se v, w ∈ X sono due vettori di X tali che v + A = B e w + A = B, allora si ha v + A = w + A,
cioè il vettore v − w fissa il punto A (( v − w) + A = A). Ma se v − w fissa il punto A allora, dal momento che
→
−
(essendo l’azione transitiva) ogni punto P di X si può scrivere come P = z + A per qualche z ∈ X , per ogni
P ∈ X si ha
( v − w) + P = ( v − w) + ( z + A)
= ( v − w + z) + A
= ( z + ( v − w)) + A
= z + ( v − w + A)
= z+A
=P
e dunque v − w fissa ogni punto P di X. Ma l’azione è fedele, e quindi deve essere v = w (cioè per ogni A, B
→
−
−−→
in X esiste unico v ∈ X per cui B = v + A). Si può dunque indicare con AB = v.
−−→ −−→ −−→
Ora mostriamo che ∀A, B, C ∈ X, AB + BC = AC. Infatti, per definizione risulta
−−→
AB + A = B
−−→
BC + B = C
* La parola affine fu usata per la prima volta da Eulero, ma la geometria affine fu riconosciuta come disciplina soltanto dopo
l’avvio del programma di Erlangen di Felix Klein (1849–1925) – cioè il famoso discorso tenuto nel 1872 da Klein nell’Università di
Erlangen, in cui Klein propone una unificazione delle geometrie note al tempo (euclidea piana e dello spazio, non-euclidea, proiettiva,
affine,…) con una interpretazione in termini di gruppi di simmetria – o meglio gruppi di trasformazioni: gli spazi tradizionali sono
“spazi omogenei” rispetto ad una opportuna scelta del gruppo di trasformazioni (le similitudini e le rototraslazioni per la geometria
euclidea, le trasformazioni lineari per la geometria affine, …) e le proprietà che si studiano sono quelle invarianti rispetto all’azione
di tale gruppo (angoli, lunghezze, …). Questo approccio ha avuto una significativa influenza sul modo in cui la geometria è stata
insegnata e divulgata nei successivi (≥ 50) anni.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
119
§ 14. SPAZI AFFINI
e quindi
−−→
−−→ −−→
C = BC + B = ( BC + AB) + A
che per definizione (e commutatività) si legge come
−−→ −−→ −−→
AC = AB + BC.
⨳
→
−
(14.5) Supponiamo di avere un insieme non vuoto X e uno spazio vettoriale X , insieme con una funzione
→
−
−−→
X × X → X , indicata da ( A, B) 7→ AB che soddisfa i due assiomi:
→
−
−−→
(i) ∀A ∈ X, ∀v ∈ X , ∃ unico B ∈ X : AB = v.
−−→ −−→ −−→
(ii) ∀A, B, C ∈ X, AB + BC = AC (assioma di Chasles* )
Allora X è spazio affine rispetto all’azione
→
−
( v, A) ∈ X × X 7→ A + v,
−−→
dove si definisce A + v l’unico punto B ∈ X tale che AB = v (primo assioma).
Dim. Vedi esercizio (8.1).
⨳
→
−
(14.6) Esempio. X = X = Rn . Allora lo spazio affine si indica con An (R). Analogamente, per K = C, lo
spazio affine n-dimensionale si indica con An (C).
(14.7) Definizione. Una retta nello spazio affine X è un sottoinsieme di X che si può scrivere come
r = {x0 + tv : t ∈ K}
→
−
per un certo x0 ∈ X e v ∈ X ∖ {0}.† Si dice che la retta passa per un punto se il punto appartiene alla retta. Lo
→
−
spazio vettoriale ⟨v⟩ ⊂ X di dimensione uno generato da v è la giacitura della retta.
(14.8) Definizione. Tre punti A, B, C di uno spazio affine X sono allineati se stanno su una stessa retta.
−−→ −−→
(14.9) Tre punti distinti A, B, C di uno spazio affine X sono allineati se e soltanto se i vettori AB e AC sono
−−→ −−→
−−→ −−→
linearmente dipendenti (equivalentemente, se BC e BA sono linearmente dipendenti, oppure se C A e CB sono
linearmente dipendenti).
Dim. Esercizio (8.2).
⨳
(14.10) Due rette r = {A + tv : t ∈ K} e s = {B + tw : t ∈ K} coincidono se e solo se i vettori v e w sono
linearmente dipendenti (cioè se le giaciture coincidono) e A ∈ s ∧ B ∈ r.
* Michel
Chasles, matematico francese (1793–1880).
altre parole, una retta è l’orbita del punto x0 ∈ X mediante l’azione di un sottogruppo 1-dimensionale (∼
= K) dello spazio di
→
−
traslazioni X
† In
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
120
#8. SPAZI AFFINI
Dim. Supponiamo che r = s. Allora è ovvio che A ∈ s ∧ B ∈ r. Ora, dato che A ∈ s, esiste t A ∈ K tale che
A = B + t A w; analogamente, esiste tB ∈ K tale che B = A + tB v. Segue che
B − A = −t A w = tB v,
cioè t A w + tB v = 0. Se t A ̸= 0 oppure tB ̸= 0, allora abbiamo dimostrato che v e w sono linearmente dipendenti.
Altrimenti, t A = 0 = tB cioè A = B. Ma allora, dato che A + v ∈ r = s , esiste t ′ ∈ K tale che A + v = A + t ′ w, e
quindi v − t ′ w = 0 (ancora, v e w sono linearmente dipendenti).
Viceversa, supponiamo che A ∈ s e B ∈ r e che v e w siano linearmente dipendenti. Segue che A = B + t A w
per un certo t A ∈ K e che esiste t ′ ∈ K, t ′ ̸= 0, tale che v = t ′ w; quindi
r = {A + tv : t ∈ K}
= {B + t A w + tv : t ∈ K}
= {B + t A w + tt ′ w : t ∈ K}
= {B + (t A + tt ′ ) w : t ∈ K}
= {B + tw : t ∈ K}
=s
⨳
(14.11) Corollario. Per due punti distinti A ̸= B di uno spazio affine X passa una e una sola retta.
−−→
Dim. Sia K il campo dei coefficienti. Dato che A ̸= B, il vettore AB = B − A non è nullo, e quindi è ben
definita la retta
−−→
r = {A + t AB : t ∈ K} ⊂ X .
Dato che A ∈ r (per t = 0 ∈ K) e B ∈ r (per t = 1 ∈ K), la retta r passa per due punti. Se ce ne fosse un’altra
s = {x0 + tv} ⊂ X,
dovrebbero esistere t A, tB ∈ K tali che
A = x0 + t A v,
e quindi
B = x0 + tB v,
−−→
AB = B − A = (tB − t A ) v,
−−→
cioè v e AB sarebbero linearmente dipendenti. Inoltre, sostituendo si otterrebbe
x0 = A − t A v = A −
t A −−→
AB,
tB − t A
dunque x0 ∈ r. Dalla (14.10) segue quindi che r = s.
⨳
Vedremo più avanti come generalizzare (14.11) a insiemi di più di due punti. Un altro importante teorema
di geometria affine è il seguente.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
121
§ 14. SPAZI AFFINI
(14.12) Teorema. Consideriamo il piano affine. Se A ∈ A2 (K ) è un punto e r una retta che non passa per
A, allora esiste unica la retta per A che non interseca r (che chiamiamo la parallela a r passante per A). Tale
retta ha la stessa giacitura di r.*
Dim. Per definizione esistono un punto x0 e un vettore v ̸= 0 per cui
r = {x0 + tv : t ∈ K},
e non esiste t ∈ K per cui x0 + tv = A (dato che r non passa per A). La retta
r ′ = {A + tv : t ∈ K}
passa certamente per A. Supponiamo che r ∩ r ′ ̸= ∅. Allora esistono t1 , t2 ∈ K tali che
A + t1 v = x0 + t2 v ∈ r ∩ r ′ ,
e quindi
A = x0 + (t2 − t1 ) v =⇒ A ∈ r
che è assurdo. Abbiamo mostrato che esiste una retta che non interseca r.
Supponiamo di avere due rette s e s′ tali che s ∩ r = ∅ e s′ ∩ r = ∅ e passanti per A. Allora si possono
scrivere con le equazioni s = {A + tw} e s′ = {A + tw′ }. Per la proposizione (14.10) le due rette coincidono se
e solo se w e w′ sono linearmente dipendenti. Analogamente a quanto visto sopra, s ∩ r = ∅ se e solo se non
esistono t1 e t2 ∈ K tali che A + t1 w = x0 + t2 v, cioè se e solo se l’equazione vettoriale (nelle incognite t1 e t2 )
t1 w − t2 v = x0 − A
non ha soluzioni, il che avviene se e solo se il vettore x0 − A non appartiene al sottospazio di K 2 generato da w
e v. Ora, se v e w sono linearmente indipendenti allora tale sottospazio coincide con K 2 , per cui la soluzione
c’è. Affinché la soluzione non esista è necessario che v e w siano dipendenti. Abbiamo quindi mostrato che w
è necessariamente multiplo di v. Dato che lo stesso vale per w′ , risulta che w e w′ sono linearmente dipendenti
e quindi s = s′ .
⨳
(14.13) Nota. Osserviamo che valgono le seguenti proprietà: Se X è un piano affine, allora
(i) Per ogni due punti distinti passa una unica retta ((14.11)).
(ii) Per ogni retta r e punto A ̸∈ r, esiste una unica retta per A che non interseca r (detta parallela).
(iii) Esistono almeno 4 punti che non contengono terne di punti allineate.
(Osserviamo che le prime due proprietà (ma non la terza) valgono anche per una retta affine.)
(14.14) Esempio. Sia F un campo finito di ordine pk (prossimo anno, algebra?). Primo p. Allora, A2 (F) è
un piano affine sul campo F. Per p = 2, k = 1, F2 , A2 (F2 ) quanti punti ha? Quante rette? Che legame ha con
un tetraedro? Per p = 3, k = 1, con F3 = Z3 (si veda l’esercizio (8.22))? In generale, se F è un campo finito
di ordine n, allora A2 (F) ha n2 punti, una retta affine ha n punti, e per un punto passano n + 1 rette (perché?
considerare il fascio di rette per un punto e le intersezioni delle rette del fascio con una retta che non passa per
il centro del fascio). Per ognuna delle n2 (n2 − 1) coppie (ordinate) di punti distinti di A2 (F) c’è una sola retta,
e in una retta ci sono n(n − 1) coppie (ordinate) di punti distinti. Quindi in totale le rette sono
n2 ( n2 − 1 )
= n2 + n.
n(n − 1)
* Due
rette sono quindi parallele se e solo se hanno la stessa giacitura?
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
122
#8. SPAZI AFFINI
(14.15) Nota. Segue che esiste una relazione di equivalenza tra rette (relazione di parallelismo: r ∥ s ⇐⇒
r = s ∨ r ∩ s = ∅). In particolare, un piano affine ha una struttura di incidenza, nel senso che si ha un insieme
P di punti, un insieme R di rette, e una relazione di appartenenza ∈ : P × R → {0, 1}.
−−→ −−→
È possibile definire il rapporto (ratio) AC : AB di tre punti allineati in uno spazio affine A, B, C come
quell’unico ρ tale che
−−→
−−→
AC = ρ AB.
(14.16) Il rapporto di tre punti allineati in uno spazio affine su campo K esiste ed è unico in K.
Dim. Esercizio (8.14).
⨳
(14.17) Dati tre punti A, B, C di uno spazio affine, il rapporto ρ sopra definito si indica come
−−→
AC
−−→ −−→ AC
ρ = AC : AB = −−→ =
,
AB
AB
e con un abuso di notazione si pone
AC C A
CA
AC
=
=−
=−
BA AB
BA
AB
(14.18) Teorema (Talete (∼624–546)). Siano li , i = 1, 2, 3 tre rette parallele distinte di un piano affine X, e
r1 , r2 altre due rette non parallele a li , con intersezioni Pi, j = ri ∩ l j . Allora
−−−−−−→ −−−−−−→ −−−−−−→ −−−−−−→
P1,1 P1,3 : P1,1 P1,2 = P2,1 P2,3 : P2,1 P2,2 .
Viceversa, se B è un punto di r1 tale che
−−−−→ −−−−−−→ −−−−−−→ −−−−−−→
P1,1 B : P1,1 P1,2 = P2,1 P2,3 : P2,1 P2,2 ,
allora B = P1,3 .
−−−−→ −−−−→
−−−−→ −−−−→
Dim. Per semplicità chiamiamo Ai = P1,i e Bi = P2,i per i = 1, 2, 3, e a = A1 A3 : A1 A2 , b = B1 B3 : B1 B2 . Per
prima cosa dobbiamo mostrare che a = b. I tre vettori Bi − Ai , per i = 1, 2, 3, sono tutti multipli di un vettore
non nullo v (dato che le tre rette li sono parallele), cioè
Bi = Ai + βi v
per certi βi ∈ K, i = 1, 2, 3. Le rette ri d’altra parte non sono parallele a v. Per definizione si ha
A3 = A1 + a( A2 − A1 )
B3 = B1 + b( B2 − B1 )
=⇒ B3 − A3 = ( B1 − A1 ) + b( B2 − B1 ) − a( A2 − A1 ).
=⇒ a( A2 − A1 ) − b( B2 − B1 ) ∈ ⟨v⟩.
Ma
B2 − B1 = ( A2 + β2 v) − ( A1 + β1 v)
= A2 − A1 + (β2 − β1 ) v
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
123
§ 15. SOTTOSPAZI AFFINI
e quindi
⟨v⟩ ∋ a( A2 − A1 ) − b[ A2 − A1 + (β2 − β1 ) v]
=⇒ a( A2 − A1 ) − b( A2 − A1 ) ∈ ⟨v⟩,
cioè (a − b)( A2 − A1 ) ∈ ⟨v⟩. Ma r1 non è parallela a v, quindi deve necessariamente essere a − b = 0, cioè la
tesi. Viceversa: poniamo B3 = B (senza supporre B3 ∈ l3 ), e siano a, b, v, con a = b, e β1 , β2 come sopra. Non
è difficile mostrare che
B3 ∈ l3 ⇐⇒ B3 − A3 ∈ ⟨v⟩.
Se ripercorriamo le uguaglianze al contrario possiamo dedurre che
B3 − A3 = ( B1 − A1 ) + b( B2 − B1 ) − b( A2 − A1 ).
= B1 − A1 + b( B2 − A2 ) − b( B1 − A1 )
= A1 + β1 v − A1 + b(β2 − β1 ) v ∈ ⟨v⟩
Per esercizio provare a completare i dettagli della dimostrazione (o a trovarne un’altra): esercizio (8.15) a
pagina 136.
⨳
§ 15.
SOTTOSPAZI AFFINI
(Cfr.)*
→
−
(15.1) Definizione. Sia X uno spazio affine e X lo spazio vettoriale su campo K associato. Se P ∈ X è un
→
−
punto fissato di X e W ⊂ X è un sottospazio vettoriale, allora il sottospazio
S = {x ∈ X : x − P ∈ W }
di tutti i punti x per cui x − P ∈ W si dice sottospazio affine passante per P e parallelo a W . Il sottospazio W
si dice giacitura di S. La dimensione di S è per definizione la dimensione di W .
(15.2) Nota. I sottospazi affini sono le orbite mediante l’azione del sottospazio W , che agisce mediante traslazioni sullo spazio affine. Osserviamo anche che, seguendo la definizione (15.1), le rette sono proprio i
sottospazi affini di dimensione 1. Inoltre non è difficile vedere che i punti sono i sottospazi affini di dimensione
0. I sottospazi di dimensione dim ( X ) − 1 (codimensione 1 in X) si dicono iperpiani. I sottospazi di dimensione
2 si dicono piani. Se n = 3, piani e iperpiani coincidono.
→
−
(15.3) Proposizione. Se S ⊂ X è un sottospazio affine con giacitura W ⊂ X , allora è uno spazio affine con
→
−
→
−
spazio vettoriale associato S = W ⊂ X
→
−
→
−
Dim. Il gruppo additivo X agisce in modo fedele e transitivo su X per definizione, e dunque W ⊂ X agisce in
modo fedele e transitivo sulla sua orbita, che per definizione è S!
⨳
* Cfr:
Nacinovich, Cap I, §2 [2].
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
124
#8. SPAZI AFFINI
→
−
(15.4) Proposizione. Siano P1 , P2 ∈ X due punti di uno spazio affine X, W1 , W2 ⊂ X due sottospazi vettoriali
e S1 = P1 + W1 , S2 = P2 + W2 i due sottospazi affini passanti per Pi con giacitura Wi (i = 1, 2). Allora S1 = S2
se e solo se W1 = W2 , P2 ∈ S1 e P1 ∈ S2 . Cioè, un sottospazio affine è identificato da uno qualsiasi dei suoi
punti e dalla giacitura.
Dim. Supponiamo che S1 = S2 . Allora è ovvio che P1 ∈ S2 e P2 ∈ S1 . Vogliamo dimostrare che W1 = W2 .
Osserviamo che per definizione W1 = S1 − P1 e W2 = S2 − P2 . Dato che P1 ∈ S1 = S2 , per definizione il
vettore P1 − P2 appartiene a W2 . Inoltre P2 = P1 + (P2 − P1 ) da cui si trae che
S2 = P2 + W2
= P1 + ( P2 − P1 ) + W 2
= P1 + W 2
dato che w + W2 = W2 (come insiemi!) per ogni w ∈ W2 (vedi esercizio (8.7)), ed in particolare per P2 − P1 .
Ora, questo implica che S1 = S2 se e solo se
P1 + W 1 = P1 + W 2
ma questo accade se e solo se W1 = W2 .
Viceversa, se P1 ∈ S2 e P2 ∈ S1 e W1 = W2 , allora come sopra si può scrivere S1 = P1 + W1 e S2 = P2 + W2 ,
e quindi S1 = S2 .
⨳
(15.5) Per due punti distinti di uno spazio affine passa una unica retta. Per tre punti non allineati di uno spazio
affine passa un unico piano.
Osserviamo che la proposizione (15.4) generalizza la proposizione (14.10): basta considerare i sottospazi
1-dimensionali generati da v e w.
(15.6) Definizione. Consideriamo un insieme di d + 1 punti P0 , P1 , …Pd in uno spazio affine X. Il più piccolo
sottospazio affine S ⊂ X che contiene tutti i punti P0 , …, Pd si dice sottospazio affine generato dai d + 1 punti
P0 , …, Pd .
(15.7) Nota. Dobbiamo dimostrare che la definizione (15.6) è ben posta, dal momento che potrebbe non
esistere un sottospazio con la proprietà cercata. Vediamo come.
(15.8) Proposizione. Il sottospazio affine di X generato da d + 1 punti P0 , …, Pd ∈ X è il sottospazio passante
per P0 e con giacitura
−−−−→ −−−−→
−−−−→ →
−
⟨P 0 P 1 , P 0 P 2 , . . . P 0 P d ⟩ ⊂ X ,
e non dipende dall’ordine con cui i punti P0 , …, Pd sono stati scelti.
Dim. Sia S il sottospazio affine di X passante per P0 e con giacitura
−−−−→ −−−−→
−−−−→ →
−
W = ⟨P 0 P 1 , P 0 P 2 , . . . P 0 P d ⟩ ⊂ X .
Si ha ovviamente P0 ∈ S e, inoltre, per ogni i Pi ∈ S dato che per ogni i = 1, . . . d si ha Pi = P0 + (Pi − P0 ) ∈
P0 + W = S (per definizione Pi − P0 ∈ W ). Quindi S contiene tutti i punti P0 , …, Pd .
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
125
§ 15. SOTTOSPAZI AFFINI
Supponiamo che S ′ sia un altro sottospazio affine contenente i punti P0 , …, Pd . In particolare, P0 ∈ S ′ ,
→
−
per cui esiste W ′ ⊂ X tale che
S ′ = P0 + W ′ .
Dal momento che per ogni i = 1, …, d Pi ∈ S ′ , e quindi Pi − P0 ∈ W ′ ,
−−−−→ −−−−→
−−−−→
W = ⟨P 0 P 1 , P 0 P 2 , . . . P 0 P d ⟩ ⊂ W ′ .
Cioè S è contenuto in ogni sottospazio affine contenente i d + 1 punti. Sia ora S ′ il sottospazio affine costruito
a partire da una permutazione dei d + 1 punti esattamente come S. Allora l’argomento di sopra si applica sia a
S che a S ′ , per cui S ⊂ S ′ e S ′ ⊂ S, cioè S = S ′ .
⨳
(15.9) Nota. Consideriamo d + 1 punti P0 , P1 , …, Pd nello spazio affine X. A priori non ha senso scrivere la
somma
d
∑
λi Pi =?
i=0
per dei coefficienti λi ∈ K, dal momento che non abbiamo definito prodotto di uno scalare λi per un punto Pi
(potremmo farlo solo moltiplicando vettori con scalari, non punti con scalari). Però, come nel caso di Rn , si
potrebbe prendere un punto qualsiasi O ∈ X (l’origine) e definire tale somma come
d
∑
d
∑
−−→
λi OPi .
λi Pi = O +
i=0
i=0
Questa definizione però dipende dalla scelta fatta per O. È interessare notare, però, che nel caso
somma non dipende dalla scelta di O: se Q è un altro punto,
d
∑
∑d
i=0 λi
= 1 la
∑ −−−→
−−→
λi (QPi ) + Q
λi (OPi ) + O =
d
i=0
i=0
⇐⇒
⇐⇒
d
∑
i=0
d
∑
λi (Pi − O − (Pi − Q)) + O − Q = 0
λi (Q − O) + O − Q
=0
i=0
⇐⇒ 0 = 0.
Possiamo in questo modo definire anche il baricentro di d + 1 punti, interpretando λi come masse (più
propriamente, densità di massa). Se le masse sono uguali, il baricentro affine (geometrico) ha λi = 1/(n + 1).
(15.10) Definizione. In uno spazio affine di dimensione n, si dice che d + 1 punti sono indipendenti se la
dimensione del sottospazio affine generato è d, altrimenti si dicono dipendenti. È chiaro che se sono indipendenti, allora d ≤ n. Due punti sono dipendenti se e solo se coincidono. Tre punti sono dipendenti se e solo
se appartengono ad una stessa retta (e si dicono allineati. Analogamente, quattro punti sono indipendenti se
non sono contenuti in un piano, per cui quattro punti sono dipendenti se e solo se appartengono ad uno stesso
piano.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
126
#8. SPAZI AFFINI
(15.11) d + 1 punti x0 , x1 , . . . , xd sono dipendenti se e soltanto se esistono λ1 , …, λd non tutti nulli tali che
∑d
−−−→
i=0 λi x0 xi = 0.
Dim. Segue dalla definizione.
⨳
(15.12) Nota. Due punti distinti nel piano sono sempre allineati. È vero che tre punti nello spazio sono allineati
(dipendenti) se e soltanto se il determinante della matrice 3 × 3 delle loro coordinate è nullo? Quale direzione
della doppia implicazione è vera e quale no?
(15.13) Definizione. Sia X uno spazio affine su campo K di dimensione n ≥ 1. Un riferimento affine in X è
(equivalentemente):
(i) Una scelta di n + 1 punti di X indipendenti (dal punto di vista affine).
→
−
→
−
(ii) Una scelta di un punto x0 di X e di n vettori indipendenti di X (cioè, di una base per X , visto che
→
−
dim ( X ) = dim ( X ) = n).
(15.14) (Equazioni parametriche) Sia S ⊂ X un sottospazio affine. Allora se si sceglie un riferimento affine
P0 , P1 , . . . , Pd ∈ S si può scrivere S mediante le equazioni parametriche come
d
∑
−−−−→
S = {P0 +
ti P0 P1 : ti ∈ K},
i=1
o anche come
P = P0 +
d
∑
−−−−→
ti P0 P1
i=1
(15.15) Nota. Ritroviamo qui le equazioni parametriche di rette (P = P0 + tv) e piani (P = P0 + sv + tw).
(15.16) Nota. Come abbiamo visto nella nota (15.9), dati d + 1 punti P0 , . . . Pn in uno spazio affine X di
dimensione n si possono considerare i punti P che si scrivono come
P=
d
∑
λi Pi ,
i=0
d
∑
λi = 1
i=0
con λi ∈ K. Questi sono tutti e soli i punti del sottospazio affine generato dai Pi , e i coefficienti λi ∈ K sono
unici, nel senso che se
P=
d
∑
i=0
λi Pi ,
d
∑
i=0
λi = 1,
=
d
∑
i=0
λ′i Pi ,
d
∑
λ′i = 1
i=0
allora λi = λ′i per ogni i. I (d + 1) elementi λi ∈ K si chiamano le coordinate baricentriche del punto P.
Quando K = R, gli insiemi dei punti con coordinate baricentriche positive o nulle vengono chiamati
Segmenti per d = 1 (con estremi P0 e P1 );
Triangoli per d = 2 (con vertici P0 , P1 e P2 , e lati dati dai segmenti ottenuti ponendo λi = 0, per i = 0, 1, 2).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
127
§ 15. SOTTOSPAZI AFFINI
In altre parole, il segmento che ha per estremi A, B ∈ An (R) si scrive come
AB = {λ0 A + λ1 B : λ0 ≥ 0, λ1 ≥ 0, λ0 + λ1 = 1}
−−→
= {A + λ1 AB : 0 ≤ λ1 ≤ 1}.
I punti del triangolo che ha per vertici A, B, C ∈ An (R) sono gli elementi dell’insieme
λ0 A + λ1 B + λ2C : λ0 ≥ 0,
λ1 ≥ 0,
ABC =
λ2 ≥ 0,
λ0 + λ1 + λ2 = 1
−−→
−−→
= {A + λ1 AB + λ2 AC : λ1 ≥ 0, λ2 ≥ 0, λ1 + λ2 ≤ 1}.
I lati del triangolo ABC sono
λ0 A + λ1 B + λ2C : λ0
λ1
λ
AB =
2
λ
+
λ
+
λ
0
1
2
λ2
≥ 0,
≥ 0,
≥ 0,
= 1,
=0
= {λ0 A + λ1 B : λ0 ≥ 0, λ1
λ0 A + λ1 B + λ2C : λ0
λ1
λ
BC =
2
λ
+
λ
+
λ
0
1
2
λ0
≥ 0, λ0 + λ1 = 1}
≥ 0,
≥ 0,
≥ 0,
= 1,
=0
= {λ1 B + λ2C : λ1 ≥ 0, λ2 ≥ 0, λ1 + λ2 = 1}
λ0 A + λ1 B + λ2C : λ0 ≥ 0,
λ
≥
0,
1
λ
≥
0,
CA =
2
λ
+
λ
+
λ
=
1,
0
1
2
λ1 = 0
= {λ0 A + λ2C : λ0 ≥ 0, λ2 ≥ 0, λ0 + λ2 = 1}.
§ 15.1.
OPZIONALE: PIANI AFFINI FINITI E QUADRATI LATINI, GRECO-LATINI E MAGICI
Problema dei 36 ufficiali (L. Euler, 1782): C’è una delegazione di 36 ufficiali, ognuno dei quali appartiene
ad uno dei 6 reggimenti a, b, c, d, e, f . I 6 gradi sono α, β, γ, δ, ϵ , φ, cioè colonnello, tenente-colonnello,
maggiore, capitano, tenente, sottotenente. Possono formare un quadrato 6 × 6 in modo tale che ogni grado e
reggimento è rappresentato in ogni riga e in ogni colonna (equivalentemente, in ogni riga e in ogni colonna
non compaiono mai due reggimenti uguali o due gradi uguali)?
Un quadrato del genere si chiama anche “quadrato greco-latino”, perché i 36 elementi possono essere
rappresentati da aα, aβ, … f ϵ, f φ.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
128
#8. SPAZI AFFINI
Naturalmente lo stesso problema può essere posto per quadrati n × n, ed Eulero riuscì a trovare soluzioni
per ogni n tranne quelli per cui n ≡ 2 mod 4. Quindi congetturò che non possono esserci soluzioni se n ≡ 2
mod 4.
La congettura fu dimostrata (con qualche errore) da Tarry (1901) per n = 6 (cioè Tarry mostrò che non
esiste la soluzione al problema per n = 6),* ma confutata per il caso in generale da Parker nel 1959, con
un celebre controesempio con n = 10 (indicato nella figura 8.1 a pagina 134);† nel 1960 fu dimostrato che
anche negli altri casi la congettura è falsa, cioè che anche per per ogni n > 6, n ≡ 2 mod 4 esistono quadrati
greco-latini‡ In pratica esistono per ogni n tranne n ∈ {2, 6}.
Un quadrato magico n × n è un quadrato in cui i primi n2 numeri compaiono in modo tale che la somma
delle cifre per colonne e per righe è costante.§ Osserviamo che se si ha un quadrato greco-latino n × n, i cui
elementi sono (i, j ), con i, j = 0, . . . , n − 1, allora sostituendo al posto di (i, j ) il numero 1 + i + n j di ottiene
un quadrato magico. Infatti con questa sostituzione la somma dei coefficienti di ogni riga (e quella di ogni
colonna) è uguale a (perché?)
n−1
∑
i=0
(1 + i ) + n
n−1
∑
j=0
1
n
1
j = n + n ( n − 1 ) + n2 ( n − 1 ) = ( n2 + 1 ) .
2
2
2
Per costruire quadrati greco-latini, torniamo per un momento alla geometria affine.
(15.17) Nota. Le proprietà della Nota (14.13) possono essere prese come assiomi per una struttura di geometria
affine (finita). Più precisamente, una struttura di incidenza è una coppia ( X, L), dove X è un insieme finito (di
punti), e L un insieme finito di rette, con la relazione di incidenza x ∈ l, ∈ : X × L → {0, 1}. Se valgono anche
gli assiomi
(i) Per ogni due punti distinti di X passa una unica retta.
(ii) Per ogni retta r e punto A ̸∈ r, esiste una unica retta per A che non interseca r (detta parallela).
(iii) Esistono almeno 4 punti che non contengono terne di punti allineate.
allora X è un piano affine. Due rette di X si dicono parallele se non si intersecano, oppure se sono uguali. Si
tratta di una relazione di equivalenza: basta dimostrare che è transitiva (dato che è simmetrica e riflessiva).
Siano a, b e c tre rette distinte (se due di tre rette coincidono allora evidentemente vale la proprietà transitiva
per questo caso particolare), con a ∩ b = ∅ = b ∩ c. Se esistesse un punto P ∈ a ∩ c, allora P ̸∈ b, e dunque
esiste una unica retta b̂ parallela a b passante per P. Ma sia a che c non intersecano b, e passano per P, dunque
a = c, cioè non è vero che le tre rette non sono distinte. Quindi P non esiste, cioè a è parallela a c.
A proposito degli assiomi, in realtà si può prendere l’assioma
(iii)’ Esistono tre punti non collineari.
* G.
Tarry, “Le problème des 36 officiers,” C. R. Assoc. Fran. Av. Sci. Vol. 1(1900), p. 122–123, Vol. 2(1901), p. 170–203.
T. Parker, “Construction of some sets of mutually orthogonal Latin squares,” Proc. Amer. Math. Soc., Vol. 10(1959), p. 946–
949. Si veda anche R. C. Bose and S.S. Shrikhande, “On the construction of sets of mutually orthogonal Latin squares and the falsity
of a conjecture of Euler”, Trans. Amer. Math. Soc., 95 (1960) 191–209.
‡ R. C. Bose and S. S. Shrikhande, “On the falsity of Euler’s Conjecture about the non-existence of two orthogonal latin squares of
order 4t+2,” Proc. Nat. Acad. Sci. U. S. A. Vol. 45(1959), p. 734–737. R.C. Bose, S.S. Shrikhande, and E.T. Parker, “Further results
on the construction of mutually orthogonal Latin squares and the falsity of Euler’s conjecture”, Canad. J. Math., 12 (1960) 189–203.
§ In genere si richiede anche che la somma delle cifre sulle due diagonali sia uguale alla somma costante delle colonne e righe.
Alcuni chiamano tali quadrati magici perfetti.
† E.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
129
§ 15. SOTTOSPAZI AFFINI
invece che il (iii). Occorre poi dimostrare che i due insiemi di assiomi sono equivalenti…*
(15.18) Nota. Consideriamo una struttura di incidenza ( X, L) come sopra. Se X ha h elementi x1 , x2 , …xh e
L ha k elementi l1 , l2 , …, lk , allora ogni relazione di incidenza X × L → {0, 1} può essere descritta come una
matrice A di tipo h × k in cui i coefficienti ai j sono 0 o 1: per i = 1 . . . h, e j = 1 . . . k si pone
1
ai j =
0
se xi ∈ l j ;
se xi ̸∈ l j .
Nell’esercizio (8.25) vedremo come è possibile verificare gli assiomi di piano affine finito su una matrice di
incidenza. È possibile –teoricamente– scrivere un algoritmo a “forza-bruta” che enumera tutte le possibili 2hk
matrici di incidenza di geometrie affini finite, scarta quelle che non soddisfano gli assiomi, e genera quindi una
lista di tutte le geometrie finite (fino ad un certo numero di punti). Un approccio del genere è anche praticabile?†
Osserviamo che se F ha n elementi, allora A2 (F) ha n2 punti, e le rette in A2 (F) sono costituite da n
punti (sono parametrizzate da F, nell’equazione parametrica P = A + tv). Quante sono le rette per un punto?
Prendiamo un punto P e una retta r che non passa per P. Allora per ognuno degli n punti di r c’è una (unica)
retta che passa anche per P, e queste n rette sono tutte distinte (perché?). Dato che per P c’è anche la parallela
a r, in tutto ci sono n + 1 rette per P. Perché non ce ne sono altre? Se s è una retta per P non parallela a r, allora
r ∩ s ̸= ∅, e dato che se s ha più di un punto di intersezione con r allora s = r, l’intersezione è costituita da un
punto di r. Ma allora s è una delle n rette già contate sopra.
Ora contiamo quanti punti e quante rette ci sono in un piano affine finito (non necessariamente un A2 (F)),
definito a partire dalla struttura di incidenza.
(15.19) Nota. Supponiamo che una retta di un piano affine X (definito a partire però dagli assiomi della
nota (14.13)…) abbia un numero finito di punti, n (deve essere n ≥ 2 perché…). Il piano si dice di ordine n.
Dimostriamo che tutte le rette hanno n punti, che per ogni punto passano n + 1 rette, e che in totale ci sono n2
punti e n2 + n rette.
Dim. Sia r la retta con n punti e sia P un punto non su r (che esiste per il (iii ) della nota (14.13) a pagina 121).
Sia x il numero di rette per P. Delle x rette, una sola è parallela a r (per (ii )); le x − 1 rette hanno intersezione
con r e passano per P. Let intersezioni delle rette con r sono necessariamente distinte, per cui x − 1 ≤ n. D’altro
canto per ogni punto R di r esiste una unica retta passante per R e per P (e queste rette sono tutte distinte): quindi
x − 1 ≥ n, cioè per ogni punto non sulla retta r passano n + 1 rette distinte.
Ora, siano P e Q due punti distinti. Per (iii ), esiste sicuramente una retta l che non contenga né P né Q
(altrimenti, tutte le rette contengono almeno P oppure Q: tutte le rette intersecano la retta per P e Q: non ci
possono essere punti al di fuori di questa retta (per l’assioma delle parallele): tutti i punti sono allineati). Il
numero di rette per P (e il numero di rette per Q) è uno in più del numero di punti di l, e dunque il numero di
rette per P è uguale al numero di rette per Q.
* È chiaro che (iii) =⇒ (iii)’. Viceversa, se ci sono tre punti non allineati A, B, C, allora esistono le rette r parallela ad AB e
passante per C e s parallela a BC e passante per A. Se le rette r e s non si intersecano (cioè, sono parallele), dato che la relazione di
parallelismo è una relazione di equivalenza, allora BC (la retta per B e C) è parallela a AB, e BC e AB si intersecano in B certamente,
le due rette coincidono, cioè ABC sono allineati (contro ipotesi). Quindi esiste D ∈ r ∩ s. I quattro punti A, B, C e D non contengono
terne di punti allineate. Osserviamo che AB e CD sono parallele e AD e CB sono parallele. Se tre dei quattro punti fossero allineati
allora le quattro rette AB, CD e AD e CB sarebbero tutte tra loro parallele, e quindi coincidenti. Ma ABC non sono allineati per ipotesi
e questo è assurdo.
† Stimando molto per eccesso che un computer non può (e non potrà nei prossimi anni) eseguire più di 1015 operazioni al secondo.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
130
#8. SPAZI AFFINI
Ora, se l è una seconda retta (e la retta r ha n punti), allora scegliamo un punto P non su l e non su r (ancora,
P deve esistere per (iii ), altrimenti tutti i punti sono in l ∪ r, e non vale l’assioma delle parallele …). Segue
che r e l hanno lo stesso numero di punti, e per l’arbitrarietà di l la tesi.
Ora, se x è il numero totale di punti e y il numero totale di rette, abbiamo:
(15.20)
ny = (n + 1) x
(contando i punti al variare delle rette, alla fine ogni punto è stato contato esattamente n + 1 volte). Ma possiamo
contare anche le rette con le coppie di punti distinti: per ognuna delle x ( x − 1)/2 coppie di punti distinti c’è
una retta, ed ogni retta è contata n(n − 1)/2 volte in questo modo. Dunque
(15.21)
x ( x − 1) = yn(n − 1).
Risolviamo le due equazioni (15.20) e (15.21) otteniamo subito x = n2 e y = n2 + n.
⨳
Quindi le matrici (possibili) di incidenza per i piani di ordine n hanno h = n2 righe e k = n2 + n colonne,
e quindi sono
2 2
2n (n +n) .
Il numero di secondi necessario (con un supercomputer ipotetico, capace di 1015 operazioni al secondo) è
3
almeno 2n (n+1) 10−15 , cioè…
Torniamo ora ai quadrati greco-latini, che fondamentalmente sono unioni di due quadrati latini distinti (e
con la proprietà che tutte le n2 coppie compaiono), dove per quadrato latino si intende la parte a lettere latine.
Più precisamente, un quadrato latino di ordine n è una matrice n × n i cui coefficienti sono i numeri {1, 2, . . . , n}
e in cui ogni riga e ogni colonna contiene ogni numero esattamente una volta. Anche in questo caso si ha un
quadrato magico: le somme delle righe e delle colonne sono uguali a n(n + 1)/2, oppure, se si somma k ∈ Z
ad ogni coefficiente della matrice, n(n + 1)/2 + nk.
Non è difficile vedere che la tabella di moltiplicazione di un gruppo G di ordine n è di fatto un quadrato
latino: …(esercizio!).
Due quadrati latini ai, j e bi, j sono ortogonali se le coppie ordinate (ai, j , bi, j ) sono tutte distinte al variare
di i, j. Quindi, i quadrati greco-latini non sono altro che coppie di quadrati latini ortogonali.
(15.22) Esempio. Un piano affine di ordine n genera n − 1 quadrati latini n × n nel modo seguente: fissiamo
un punto O del piano e due rette x e y distinte e passanti per O. Ci sono n + 1 − 2 = n − 1 altre rette per O
distinte, n rette parallele a x e n rette parallele a y. Chiamiamo
x1 , . . . , xn
le rette parallele a x e
y1 , . . . , yn
le rette parallele a y. Sia z una delle n − 1 rette per O diverse da x e y, e
z = z1 , . . . , zn
le rette parallele a z. Per ogni i, j le due rette xi e y j non sono parallele, e quindi si intersecano in un unico punto
xi ∩ y j . Questo punto è contenuto in una sola retta parallela a z, cioè esiste k ∈ {1, . . . , n} tale che xi ∩ y j ∈ zk .
Fissato z, quindi, sia A la matrice n × n con coefficienti ai, j determinati da
ai, j = k ⇐⇒ xi ∩ y j ∈ zk .
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
131
§ 15. SOTTOSPAZI AFFINI
(15.23) La matrice ai, j è un quadrato latino.
Dim. Gli elementi della prima riga sono
a1, j = k ⇐⇒ x1 ∩ y j ∈ zk .
Fissato k, cioè zk , se x1 ∩ y j ∈ zk e x1 ∩ yl ∈ zk con j ̸= l, allora in zk ci sono due punti distinti (perché
appartengono alle due rette y j e yl parallele distinte) che appartengono anche a x1 , cioè x1 = zk , e questo è
assurdo perché x1 è parallela a x, zk è parallela a z e x non è parallela a z. Lo stesso per le altre righe e per le
colonne.
⨳
Quindi al variare di z nell’insieme delle n − 1 rette per O non parallele a x o a y otteniamo n − 1 quadrati
latini (esercizio (8.23)). Non solo sono quadrati latini distinti: sono a due a due ortogonali!
(15.24) Se z e w sono due rette distinte per O non parallele a x e a y, e ai, j e bi, j i quadrati latini generati
come sopra, allora ai, j e bi, j sono ortogonali.
Dim. Occorre mostrare che per ogni coppia (h, k ), con h, k ∈ 1, . . . , n esiste una unica coppia di indici (i, j )
tale che
ai, j = h
bi, j = k.
Questo è equivalente a chiedere che per ogni retta zh parallela a z e per ogni retta wk parallela a w esiste unica
la coppia di rette xi e y j tali che
xi ∩ y j ∈ zh
xi ∩ y j ∈ wk .
Ma zh e wk non sono parallele e quindi si intersecano in un unico punto. Esiste una unica xi che passa per questo
punto, ed esiste una unica y j che passa per questo punto (sono fasci di rette parallele!). Quindi xi ∩ y j ∈ zh ∩ wk
come volevasi dimostrare.
⨳
Quindi per ogni piano affine finito di ordine n ≥ 3 è possibile trovare quadrati greco-latini. Ma per quali n ci
sono piani affini finiti? Certamente se n è l’ordine di un campo finito (per esempio, se n è primo* ), altrimenti
non è una domanda facile. Possiamo stabilire che non ci sono piani affini finiti di ordine 6 (altrimenti ci
sarebbe una soluzione per il problema dei 36 ufficiali di Eulero). È un esercizio molto semplice quello di usare
la costruzione indicata sopra per costruire quadrati latini e greco-latini (e quindi quadrati magici) rispetto al
campo finito Z p , p primo. Basta prendere le due rette del sistema di riferimento standard di A2 (K), con
K = Z p con p primo, e considerare i fasci di rette di equazioni y = x + q e y = kx + q, con k, q ∈ K. Allora i
due quadrati hanno coefficienti
axy = y − x
mod p,
bxy = y − kx
mod p
con x, y ∈ 0 . . . p − 1, e il quadrato magico corrispondente ha coefficienti
mxy = (y − kx
mod p) + p(y − x
mod p).
Per esempio, per p = 5 e k = 2 si ottiene
*I
campi finiti hanno ordine n = pk per p primo e k intero. La Prime Power Conjecture congettura che ci sia un piano affine di
ordine n se e soltanto se n è la potenza di un primo.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
132
#8. SPAZI AFFINI
0
6
12
18
24 |
23
4
5
11
17 |
16
22
3
9
10 |
14
15
21
2
8 |
7
13
19
20
1 |
------------------------60
60
60
60
60
60
60
60
60
60
Mentre per p = 11 e k = 2 :
0
12
24
36
48
60
72
84
96 108 120 |
119
10
11
23
35
47
59
71
83
95 107 |
106 118
9
21
22
34
46
58
70
82
94 |
93 105 117
8
20
32
33
45
57
69
81 |
80
92 104 116
7
19
31
43
44
56
68 |
67
79
91 103 115
6
18
30
42
54
55 |
65
66
78
90 102 114
5
17
29
41
53 |
52
64
76
77
89 101 113
4
16
28
40 |
39
51
63
75
87
88 100 112
3
15
27 |
26
38
50
62
74
86
98
99 111
2
14 |
13
25
37
49
61
73
85
97 109 110
1 |
------------------------------------------------------660 660 660 660 660 660 660 660 660 660 660
660
660
660
660
660
660
660
660
660
660
660
Per avere quadrati magici “perfetti” (cioè tali che anche sulle due diagonali la somma sia la costante magica),
occorre cambiare leggermente le formule:
mxy = (y − kx + q1
mod p) + p(y − x + q2
mod p)
con q1 e q2 costanti appropriate.
Per p = 5 e k = 2 si ottiene il quadrato magico perfetto:
12
18
24
0
6 |
5
11
17
23
4 |
3
9
10
16
22 |
21
2
8
14
15 |
19
20
1
7
13 |
------------------------60
60
60
60
60
60
60
60
60
60
Mentre per p = 11 e k = 2 :
60
47
34
32
19
6
72
59
46
33
31
18
84
71
58
45
43
30
96
83
70
57
44
42
108
95
82
69
56
54
120
107
94
81
68
55
0
119
106
93
80
67
12
10
118
105
92
79
24
11
9
117
104
91
36
23
21
8
116
103
48
35
22
20
7
115
|
|
|
|
|
|
660
660
660
660
660
660
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
133
§ 15. SOTTOSPAZI AFFINI
114
5
17
29
41
53
65
66
78
90 102 |
101 113
4
16
28
40
52
64
76
77
89 |
88 100 112
3
15
27
39
51
63
75
87 |
86
98
99 111
2
14
26
38
50
62
74 |
73
85
97 109 110
1
13
25
37
49
61 |
------------------------------------------------------660 660 660 660 660 660 660 660 660 660 660
660
660
660
660
660
Un programma (in python) che potrebbe fare questi conti è il seguente:
import os
import sys
N=11
def quad(N,k):
M=[[0 for x in range(N)] for y in range(N)]
for x in range(N):
output=""
for y in range(N):
M[x][y] = ((y-k*x + (N-1)/2) % N ) +N* ( (y-x +(N-1)/2) % N )
output += (" %3i " % M[x][y] )
output +=("| %3i " % sum(M[x][:]))
print output
print "\n" + "-" * N*5
output=""
for y in range(N):
output += (" %3i " % sum(M[:][y]) )
print output
print "diagonali:" , sum([M[x][x] for x in range(N)]), sum([M[x][N-1-x] for x in range(N)])
print
for k in range(2,N-1):
print "*"*60
print "N=", N, "k=", k
quad(N,k)
Se n = pk con k > 1, la faccenda si complica, però... occorre un linguaggio di programmazione che sia in
grado di fare i conti con gruppi finiti, e non solo con Z p .
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
134
#8. SPAZI AFFINI
Figura 8.1: Raffigurazione del controesempio alla congettura di Eulero per n = 10. È alla base della struttura
del romanzo La Vie – mode d’emploi (1978) di Georges Perec (1936 - 1982), e di alcuni quadri/decorazioni. Un
altro problema matematico, trattato da Eulero, alla base della struttura del romanzo è il problema del percorso
del cavallo, per una scacchiera 10 × 10.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
135
Esercizi
ESERCIZI
(8.1) Dimostrare la proposizione (14.5): supponiamo di avere un insieme non vuoto X e uno spazio vettoriale
→
−
→
−
−−→
X , insieme con una funzione X × X → X , indicata da ( A, B) 7→ AB che soddisfa i due assiomi:
→
−
−−→
(i) ∀A ∈ X, ∀v ∈ X , ∃ unico B ∈ X : AB = v.
−−→ −−→ −−→
(ii) ∀A, B, C ∈ X, AB + BC = AC
Allora X è spazio affine rispetto all’azione
→
−
(v, A) ∈ X × X 7→ A + v,
−−→
dove si definisce A + v l’unico punto B ∈ X tale che AB = v.
(8.2) Dimostrare il lemma (14.9) a pagina 119.
(8.3) Dimostrare che due rette distinte di uno spazio affine si intersecano in al più un punto. Dedurre che per
due punti distinti passa una unica retta.
(8.4) Dimostrare che se A e r sono un punto e una retta di uno spazio affine X, con A ̸∈ r, allora esiste un
unico piano di X che contiene sia A che r.
*(8.5) Sia l una retta del piano affine A2 (R). Dimostrare che l non può incontrare tutti i lati di un triangolo.*
(8.6) Dimostrare che il segmento che unisce i punti medi di due lati di un triangolo è parallelo al terzo lato.
(8.7) Dimostrare che, se V è uno spazio vettoriale e v ∈ V , V = v + V = {v + w, w ∈ V }.
(8.8) Dimostrare che se S ⊂ An (K ) è un sottospazio affine e v ∈ K n è un vettore non nullo, allora S è parallelo
al suo traslato v + S (S ∥ (v + S )). Determinare per quali v ∈ K n si ha che S ∩ (v + S ) = ∅.
1
x 0
3
1
y
(8.9) Si consideri la retta r in A (R) di equazioni parametriche = + t 2 . Scrivere l’equazione della
3
z
2
1
parallela s a r passante per 1.
1
(8.10) Determinare il piano/i piani (le equazioni di) che contengono le due rette r e s dell’esercizio (8.9).
* Legato
a questo problema c’è l’assioma di Pasch, che dice che nel piano euclideo se una retta non passa per nessuno dei vertici,
e interseca un lato di un triangolo (internamente), allora interseca uno e un solo altro lato (internamente), e interseca l’altro lato in un
punto esterno (oppure è parallela all’altro lato). Pasch ha mostrato (1882) che questa proprietà non segue dagli assiomi di Euclide (che
peraltro considerava vera l’affermazione, senza derivarla da assiomi, né esplicitamente aggiungendola come postulato).
Questa proprietà è stata considerata un assioma (assioma di ordine nel piano) da Hilbert, nei suoi Fondamenti di Geometria: se A,
B e C sono tre punti non allineati, e se r è una retta che non passa per nessuno dei tre punti che passa per il segmento AB, allora passa
per un punto del segmento AC oppure per un punto del segmento BC.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
136
#8. SPAZI AFFINI
(8.11) Scrivere l’equazione della retta per i due punti A, B ∈ A4 (R)
√
1
2
√
−1
− 2
.
A = √ , B =
1
√2
− 2
−1
(8.12) Scrivere l’equazione della retta per i due punti A, B ∈ A4 (C)
1
i
−1
−i
A = , B = .
i
1
−i
−1
(8.13) Dimostrare che due rette non parallele nel piano affine si intersecano esattamente in un punto.
−−→ −−→
(8.14) Dimostrare che il rapporto AC : AB di tre punti ABC allineati in uno spazio affine An (K) su campo
−−→ −−→
K esiste ed è unico in K. Cosa succede se si permutano i tre punti? Se AC : AB = ρ, esprimere in funzione di
ρ i rapporti
−−→ −−→
BC : BA = . . .
−−→ −−→
AB : AC = . . .
−−→ −−→
C A : CB = . . .
−−→ −−→
BA : BC = . . .
−−→ −−→
C A : CB = . . .
*(8.15) (Teorema di Talete) Siano l1 , l2 e l3 rette parallele e distinte del piano affine A2 (R), e r1 , r2 rette non
parallele a l1 , l2 , l3 . Per l’esercizio precedente (8.13), le intersezioni li ∩ r j per i = 1, 2, 3 e j = 1, 2 sono sei
singoli punti, che chiamiamo Pi, j . Dimostrare che esiste ρ ∈ R tale che
−−−−−−→
−−−−−−→
P1,1 P3,1 = ρP1,1 P2,1
−−−−−→
−−−−−−→
−
P1,2 P3,2 = ρP1,2 P2,2 .
(8.16) Determinare quali delle seguenti terne di punti di A3 (R) sono allineate:
1 2 3 2 4 3 1 1 2
2, 3, 1 ; 4, 6, 5 ; 0, 1, 1 .
6 2 4 0 0 1
3 1 2
(8.17) Considerare le tre terne di punti dell’esercizio precedente. Siano S1 , S2 e S3 i sottospazi affini di A3 (R)
generati da esse. Determinare quali tra S1 , S2 e S3 sono parallele, sghembe o incidenti.
(8.18) Un piano e una retta in A3 (R) possono essere sghembi?
[ ] [ ] [ ]
1 2 0
di A2 (R). Se costituiscono un riferimento affine, scrivere
,
,
(8.19) Si considerino i tre punti
1 2 2
esplicitamente il cambio di coordinate: un punto di coordinate (generiche) x, y si scriverà come …
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
137
Esercizi
1 0 0
0 1 0
(8.20) Determinare l’equazione del piano di A4 (R) passante per i tre punti , , .
0 0 1
1 2 3
1 0 0 1/3
0 1 0 1/3
(8.21) Determinare se i quattro punti di A4 (R) , , , costituiscono un riferimento affine per un op0 0 1 1/3
1 2 3
2
portuno sottospazio tridimensionale di A4 (R). Se sì, scrivere le equazioni del piano dell’esercizio precedente
(8.20) in queste coordinate.
*(8.22) Rappresentare in un grafo la struttura di piano affine per A2 (GF (3)), dove GF (3) = F3 (9 punti e 12
rette).
*(8.23) Dimostrare che le matrici generate da un piano affine come nell’esempio (15.22) di pagina 130 sono
quadrati latini.
(8.24) Dimostrare che tre punti A = (a1 , a2 ), B = (b1 , b2 ) e C = (c1 , c2 ) di A2 (K ) sono allineati se e solo se
il determinante
a1 b1 c1
det a2 b2 c2 = 0.
1 1 1
(8.25) Sia ( X, L) la struttura di incidenza (cfr. nota (15.17) a pagina 128) di un piano affine finito di ordine n
e A la sua matrice di incidenza associata (cfr. nota (15.18) a pagina 129).
(i) Mostrare che A è una matrice n2 × (n2 + n) (cfr. nota (15.19) a pagina 129). Dedurre una stima degli n
per cui è teoricamente possibile enumerare le geometrie finite a partire dall’elenco delle matrici A.
(ii) Mostrare che se a e b sono le colonne j-esima e j¯-esima di A, allora il prodotto scalare standard a · b (in
2
Rn ) è uguale a
n se j = j¯;
a·b =
1 se l j e l j¯ non sono parallele
0 se l j e l j¯ sono parallele e distinte.
(iii) Mostrare che se a e b sono le righe i-esima e i¯-esima di A, allora il prodotto scalare standard a · b (in
2
Rn +n ) è uguale a
n + 1 se i = i¯;
a·b =
1
se i ̸= i¯.
(iv) Dedurre che (At indica la matrice trasposta di A, Jq indica la matrice q × q che ha tutti 1 per coefficienti,
Iq la matrice identica q × q) se Pn2 +n indica la matrice che rappresenta la relazione di parallelismo in
L = {l1 , . . . , ln2 +n }, allora si ha
At A = nIn2 +n + Jn2 +n − Pn2 +n
AAt = nIn2 + Jn2 .
(v) Esplicitare l’assioma delle parallele in funzione dei coefficienti di A.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
138
#8. SPAZI AFFINI
→
−
(8.26) Sia X l’insieme di tutte le terne ( x0 , x1 , x2 ) ∈ Q3 tali che x0 + x1 + x2 = 1, e X ⊂ Q3 lo spazio vettoriale
a coefficienti in Q costituito dai (v0 , v1 , v2 ) ∈ Q2 tali che v0 + v1 + v2 = 0.
(i) Mostrare che X è un piano affine con coefficienti in Q.
(ii) Siano (1, 0, 0), (0, 1, 0) e (0, 0, 1) i tre punti del piano X. Dimostrare che non sono allineati.
(iii) Mostrare che i punti medi dei lati del triangolo ∆ con vertici (1, 0, 0), (0, 1, 0) e (0, 0, 1) sono ( 21 , 21 , 0)
( 21 , 0, 21 ) e (0, 21 , 21 ).
(iv) Dimostrare che il baricentro del triangolo ∆ è ( 13 , 13 , 13 ).
(v) Dimostrare che l’area del triangolo ABC, con A = (a0 , a1 , a2 ), B = (b0 , b1 , b2 ) e C = (c0 , c1 , c2 ), è
uguale (a meno di segno) a
a0 b0 c0
Area ( ABC ) = det a1 b1 c1 Area (∆).
a2 b2 c2
(come si definisce l’area in un piano affine? Si veda poi in § 19.1)
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
Settimana N° 9
TRASFORMAZIONI AFFINI, INCIDENZA E PARALLELISMO
§ 16.
MAPPE AFFINI
(Cfr.)*
(16.1) Definizione. Siano X e Y due spazi affini sullo stesso campo K. Una funzione f : X → Y si dice
affine (anche, mappa affine o trasformatione affine) se per ogni x ∈ X la funzione indotta sugli spazi vettoriali
→
−
→
−
sottostanti X → Y definita da
→
−
→
−
v ∈ X 7→ f ( x + v) − f ( x ) ∈ Y
è lineare.
(16.2) Esempio. Se X = Y = K = R, allora le mappe affini sono le mappe che si possono scrivere come
x 7→ ax + b.
(16.3) Esempio. Se f : X → Y è una mappa costante, allora è affine. L’identità è anche una mappa affine.
(16.4) Esempio. Tutte le traslazioni x 7→ x + v sono mappe affini.
(16.5) Una funzione f : X → Y tra spazi affini su campo K è una mappa affine se esiste x0 ∈ X per cui la
funzione
→
−
→
−
L x0 : v ∈ X 7→ f ( x0 + v) − f ( x0 ) ∈ Y
→
−
è lineare. In questo caso la funzione L x non dipende da x e si indica con f .
→
−
→
−
Dim. Dobbiamo dimostrare che per ogni x ∈ X la funzione indotta v 7→ f ( x + v) − f ( x ) è lineare X → Y . Sia
→
−
→
−
dunque x ∈ X arbitrario. Supponiamo che esista x0 come nell’enunciato, e quindi sia L : X → Y la funzione
lineare (omomorfismo di spazi vettoriali) definita da
L( v) = v 7→ f ( x0 + v) − f ( x0 ).
→
−
Dal momento che per ogni v ∈ X
(
)
(
−−→)
f ( x + v) − f ( x ) = f x 0 + −
x−→
0 x + v − f x0 + x0 x ,
* Cfr:
Nacinovich, Cap V, §3 [2].
139
140
si ha
#9. TRASFORMAZIONI AFFINI, INCIDENZA E PARALLELISMO
(
)
f ( x + v) − f ( x ) = f x 0 + −
x−→
0 x + v − f ( x0 )
( (
)
)
− f x0 + −
x−→
0 x − f ( x0 )
= L (−
x−→x + v) − L(−
x−→x )
0
0
−−→
= L (−
x−→
0 x ) + L ( v) − L ( x 0 x )
= L ( v)
che è quindi lineare in v.
⨳
(16.6) Definizione. Una mappa affine f : X → Y tra spazi affini su campo K si dice isomorfismo affine se è
una mappa affine biunivica. Se X = Y , allora si dice automorfismo affine o anche affinità.
→
− →
−
(16.7) Se f : X → Y è biunivoca, allora deve essere biunivoca anche l’applicazione lineare associata f : X →
→
−
→
−
Y . Ma allora f è invertibile, e quindi anche l’inversa f −1 : Y → X è una mappa affine (esercizio!). Dato che
l’identità è una affinità, la composizione di affinità è una affinità, e l’inversa di affinità è una affinità, allora
l’insieme di tutte le affinità costituisce un gruppo rispetto alla composizione.
(16.8) Definizione. Il gruppo di tutte le affinità su uno spazio affine X (con campo K sottostante) si indica
con GA( X ).
(16.9) Teorema. Sia X uno spazio affine su campo K di dimensione n. La scelta di un riferimento affine induce
un isomorfismo di spazi affini X ∼
= An (K ). Quindi due spazi affini su campo K con la stessa dimensione sono
sempre tra loro isomorfi.
Dim. Se x0 , x1 , …xn è un riferimento affine per X, allora si può definire la mappa f : An (K ) → X definita
da
n
∑
x−−→
x ∈ X.
λ−
(λ , . . . , λ ) 7→ x +
1
n
i 0 i
0
i=1
Non è difficile verificare che f è una mappa affine. Dato che i punti x0 , …, xn costituiscono un riferimento
affine, la giacitura
⟨−
x−0−→
x1 , . . . , −
x−0−→
xn ⟩
ha dimensione n, e quindi la funzione lineare indotta f (0 + v) − f (0) è un isomorfismo di spazi vettoriali. Da
cui segue che f è bijettiva.
⨳
(16.10) Teorema. Ogni mappa affine f : Ad (K ) → An (K ) (nel sistema di riferimento affine standard) si
scrivere in modo unico come
f ( x ) = Ax + b = A( x − 0) + (b − 0),
dove A è una matrice n × d e b un vettore di K n .
Dim. Basta considerare il punto z = (0, . . . , 0) ∈ Ad (K ). Per definizione la mappa f (z + v) − f (z ) è lineare,
e dunque esiste A: K d → K n (rappresentata come matrice nella base standard) tale che f (z + v) − f (z ) = Av.
Ponendo f (z ) = b − 0 si ha
f (z + v) = Av + b,
cioè f ( x ) = Ax + b in coordinate di K d .
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
⨳
141
§ 16. MAPPE AFFINI
(16.11) Corollario. Sia X uno spazio affine di dimensione n e Y uno spazio affine di dimensione d. Se
p0 , p1 , . . . , pn sono un riferimento affine per X, allora per ogni scelta di n + 1 punti q0 , q1 , . . . , qn in Y esiste
una unica mappa affine f : X → Y tale che f ( pi ) = qi per ogni i = 0, . . . , n.
Dim. Sia X ∼
= An (K ) l’isomorfismo indotto dalla scelta del riferimento affine. Il riferimento corrispondente
nello spazio affine An (K ) è 0, e1 , . . . , en , dove gli ei sono i versori canonici di K n . Scelto un qualsiasi riferimento affine per Y , l’applicazione affine cercata si può scrivere come f ( x ) = Ax + b, dove A è la matrice che
ha per colonne le coordinate dei vettori q1 − q0 , …, qn − q0 , mentre il termine noto b è il vettore colonna delle
coordinate di q0 . Infatti, se Ai, j indicano le componenti di A e bi le componenti di b, si ha (nelle coordinate
scelte) per ogni i = 1 . . . n
A1,i + b1
A + b
2
2,i
f ( pi ) = Aei + b =
..
.
Ad,i + bd
e f ( p0 ) = b. Questo determina i coefficienti Ai, j in modo unico, come indicato sopra.
⨳
(16.12) Teorema (Equazioni cartesiane). Sia S ⊂ X = An (K ) un sottospazio affine di dimensione d. Allora
esiste una mappa affine e suriettiva f : X → An−d (K ) per cui
S = {x ∈ X : f ( x ) = 0}.
Viceversa, per ogni mappa affine suriettiva f : X → An−d (K ) l’insieme {x ∈ X : f ( x ) = 0} è un sottospazio
affine di X di dimensione d.
Dim. Sia W la giacitura di S e P un punto di S, in modo tale che
S = P + W.
→
−
→
−
È sempre possibile trovare un comple(ta)mento W ′ di W in X , cioè un sottospazio vettoriale W ′ di X tale che
→
−
X = W ⊕ W ′.
Se dim (W ) = d, allora dim (W ′ ) = n − d. Per ogni x ∈ X il vettore x − P si scrive in modo unico come
x − P = w + w′
→
−
con w ∈ W e w′ ∈ W ′ , ed è possibile definire la proiezione (lineare) L : X → W ′ tale che L(w + w′ ) = w′ .
Il nucleo di L è ker L = W . Scelta una base per W ′ , è dato un isomorfismo W ′ ∼
= K n−d . Si consideri quindi
(mediante l’identificazione naturale tra An−d (K ) e K n−d ) la funzione f : X → An−d (K ) definita da
f ( x ) = 0 + L( x − P ) ∈ An−d (K )
(dove 0 appartiene a K n−d ). È facile vedere che è una mappa affine e che
f ( x ) = 0 ⇐⇒ x − P ∈ W
⇐⇒ x ∈ P + W
⇐⇒ x ∈ S,
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
142
#9. TRASFORMAZIONI AFFINI, INCIDENZA E PARALLELISMO
e dunque S = {x ∈ X : f ( x ) = 0}.
Viceversa, sia f : X → An−d (K ) una mappa affine e suriettiva. Sia S = {x ∈ X : f ( x ) = 0} e x0 ∈ S.
→
−
L’applicazione L : X = K n → K n−d definita da Lv = f ( x0 + v) − f ( x0 ) è lineare e suriettiva, ha quindi un
nucleo W ⊂ K n di dimensione n − (n − d ) = d. Dal momento che x0 ∈ S, per definizione f ( x0 ) = 0, e quindi
un elemento x0 + v appartiene a S se e solo se
f ( x0 + v) = 0 ⇐⇒ Lv = 0 ⇐⇒ v ∈ W ,
e quindi S = x0 + W , dove W ha dimensione d.
⨳
(16.13) Esempio. In dimensione 2 e 3, si ritrovano le equazioni cartesiane delle rette in A2 (R) (ax + by + c = 0
), dei piani in A3 (R) (ax + by + cz + d = 0) e delle rette in A3 (R) (viste come zeri di una funzione A3 (R) →
A2 ( R ) .
ax + by + cz + d = 0
a′ x + b′ y + c′ z + d ′ = 0
(16.14) Proposizione. Se f : X → Y è una mappa affine, allora l’immagine di una retta è una retta (o un punto).
Più in generale, l’immagine di un sottospazio affine di X è un sottospazio affine di Y e la controimmagine di
un sottospazio affine di Y è un sottospazio affine di X.
→
− →
→
−
→
−
−
→
−
Dim. Sia S ⊂ X un sottospazio affine con giacitura S e passante per p ∈ X: S = p + S . Allora, se f : X → Y
→
−
denota l’omomorfismo indotto da f ( f (v) = f ( x0 + v) − f ( x0 )), si ha
→
−
f (S ) = { f ( p + s) : s ∈ S }
→
−
= { f ( p + s ) − f ( p) + f ( p) : s ∈ S }
→
−
→
−
= { f ( s ) + f ( p) : s ∈ S }
→
− →
−
→
−
= { f ( p) + w : w ∈ f ( S ) ⊂ Y }.
→
−
→
− →
−
→
−
Dal momento che f è lineare, l’immagine f ( S ) ⊂ Y è un sottospazio vettoriale, da cui segue la tesi. In modo
⨳
analogo si dimostra la seconda parte (vedi esercizio (9.20)).
(16.15) Proposizione. Sia f : X → Y una mappa affine. Allora f manda terne di punti allineati in terne di
−−→ −−→
punti allineati. Non solo: se A, B, C ∈ X hanno rapporto ρ = AC : AB , allora se A′ = f ( A), B′ = f ( B) e
C ′ = f (C ) si ha
−−′−→′ −−′−→′
A C : A B = ρ,
cioè f conserva il rapporto tra terne di punti affini.
Dim. Con una scelta di riferimenti affini, sia f : An (K ) → Am (K ) definita da f ( x) = F x + b, con F matrice
e b vettore. Dato che
C = A + ρ( B − A),
si ha
C ′ = F ( A + ρ( B − A)) + b
= F A + b + ρ( FB − F A)
= ( F A + b) + ρ( FB + b − F A − b)
= A′ + ρ( B′ − A′ ),
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
143
§ 16. MAPPE AFFINI
cioè C ′ − A′ = ρ( B′ − A′ ).
⨳
La seguente proposizione dà la proposizione inversa dalla proposizione (16.15).
(16.16) Proposizione. Se f : X → Y è una bijezione tra due spazi affini su campo K (di caratteristica ̸= 2* )
che conserva il rapporto di terne di punti allineati, cioè tale che per ogni A, B, C ∈ X allineati si ha che
A′ , B′ , C ′ sono allineati e
−−′−→′ −−′−→′ −−→ −−→
A C : A B = AC : AB
con f ( A) = A′ , f ( B) = B′ e f (C ) = C ′ , allora f è una mappa affine.
Dim. La funzione f manda rette in rette (per definizione). Sia O ∈ X un punto qualsiasi, fissato, cui corrisponde
la funzione
→
−
f ( v) = f ( O + v) − f ( O )
→
−
→
−
con v ∈ X . Dobbiamo dimostrare che f è una funzione lineare, cioè un omomomorfismo di spazi vettoriali
→
−
→
−
→
−
X → Y (cioè che è additiva e omogenea di grado 1). Siano α ∈ K uno scalare e v ∈ X un vettore arbitrari.
Allora O, O + v e O + αv sono allineati, e il rapporto è
(O + αv − O) : (O + v − O) = α,
quindi deve essere
( f (O + αv) − f (O)) : ( f (O + v) − f (O)) = α,
cioè
f (O + αv) = f (O) + α ( f (O + v) − f (O),
da cui segue che
→
−
→
−
f (αv) = f (O + αv) − f (O) = α ( f (O + v) − f (O)) = α f ( v).
→
−
Se v, w ∈ X sono due vettori qualsiasi, allora O + 2v, O + v + w e O + 2w sono tre punti allineati di X, con
rapporto 2:
((O + 2w) − (O + 2v)) : ((O + v + w) − (O + 2v)) = 2
⇐⇒ O + 2w = (O + 2v) + 2((O + v + w) − (O + 2v)).
Lo stesso rapporto devono avere le loro immagini:
f (O + 2w) − f (O + 2v) = 2 ( f (O + v + w) − f (O + 2v)) ,
⇐⇒ f (O + 2w) − f (O) − ( f (O + 2v) − f (O))
= 2 ( f (O + v + w) − f (O) − ( f (O + 2v) − f (O))) ,
→
−
→
−
→
−
→
−
⇐⇒ f (2w) − f (2v) = 2 f ( v + w) − 2 f (2v)
→
−
→
−
→
−
→
−
→
−
⇐⇒ 2 f ( v + w) = f (2v) + f (2w) = 2 f ( v) + 2 f ( w)
→
−
→
−
→
−
⇐⇒ f ( v + w) = f ( v) + f ( w),
→
−
cioè f è lineare, e quindi f è una mappa affine.
* Serve
davvero questa ipotesi?
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
⨳
144
#9. TRASFORMAZIONI AFFINI, INCIDENZA E PARALLELISMO
(16.17) Teorema (Teorema fondamentale della geometria affine). Sia d ≥ 2. Se f : Ad (R) → Ad (R) è una
bijezione che manda terne di punti allineati in terne di punti allineati, allora f è una affinità.
Dim. Si veda l’esercizio (9.26).
⨳
(16.18) Nota. Cosa succede in Ad (K) con K ̸= R? Le cose si complicano, perché la dimostrazione (per passi)
data nell’esercizio (9.26) non regge. L’idea della dimostrazione per K = R è infatti di costruire una funzione
φ : K → K (che viene chiamata automorfismo del campo), e mostrare che è l’identità. Potrebbe capitare che
un campo abbia automorfismi non banali (come z 7→ z in C), per cui non solo la dimostrazione non regge, ma
l’enunciato del teorema è falso. Consideriamo infatti K = C, e f : A2 (K ) → A2 (K ) definita ponendo
f ( x, y) = ( x, y).
Tre punti A = (a1 , a2 ), B = (b1 , b2 ), C = (c1 , c2 ) sono allineati se e soltanto se
[
]
b − a1 c2 − a1
det 1
= 0,
b2 − a2 c2 − a2
e quindi f manda terne di punti allineati in terne di punti allineati. Ma non è un’affinità: l’applicazione L :
C2 → C2 definita da f ( x0 + v) − f ( x0 ), cioè
L ( v1 , v2 ) = ( v 1 , v 2 )
non è C-lineare: per esempio
L(i, 0) = (−i, 0) ̸= (i, 0) = iL(1, 0) = L(i, 0).
§ 17.
INCIDENZA E PARALLELISMO
(Cfr.)*
→
− →
− →
− →
−
(17.1) Definizione. Due sottospazi affini S, T ⊂ X di uno spazio affine X sono paralleli se S ⊂ T (o T ⊂ S ?)
, e si indica con S ∥ T . † I due sottospazi S e T si dicono incidenti se S ∩ T ̸= ∅‡ .
(17.2) Proposizione. Se S ⊂ X e T ⊂ X sono due sottospazi affini paralleli e S ∩ T ̸= ∅, allora S ⊂ T oppure
T ⊂ S.
Dim. Sia P ∈ S ∩ T . A meno di scambiare S con T , possiamo supporre dim (S ) ≤ dim (T ) e quindi V ⊂ W se
V e W sono le giaciture di S e T rispettivamente. Per ogni x ∈ S si ha x − P ∈ V , e quindi x − P ∈ W , da cui
x ∈ T . Cioè S ⊂ T .
⨳
* Cfr:
Nacinovich, Cap V, §6 [2].
→
− →
−
→
− →
−
definiscono sottospazi paralleli i sottospazi per cui S = T , mentre se S ⊂ T allora S e T sono paralleli in senso lato.
‡ Forse sarebbe meglio, seguendo la tradizione italiana, definire incidenti due rette che si incontrano in un solo punto, due piani
dello spazio che si incontrano in una retta, una retta e un piano nello spazio che si incontrano in un punto, etc. etc. Nella tradizione
anglosassone questi vengono chiamati concorrenti (invece che incidenti). C’è il problema dell’uniformità: due piani nello spazio
A3 (R) che si incontrano in una retta sarebbero incidenti, ma lo sarebbero se immersi in A4 (R), per esempio aggiungendo una
coordinata nulla?
† Alcuni
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
145
§ 17. INCIDENZA E PARALLELISMO
(17.3) Corollario. Se S ⊂ X e T ⊂ X sono due sottospazi affini paralleli, dim (S ) = dim (T ), e S ∩ T ̸= ∅
allora S = T .
Dim. Nella notazione della dimostrazione precedente, risulta V = W , e quindi S = T .
⨳
(17.4) Corollario. Se S ⊂ X è un sottospazio affine e x ∈ X è un punto di X, allora esiste un unico sottospazio
affine T ⊂ X di dimensione dim (S ) che contiene x e parallelo a S.
Dim. Due sottospazi T ′ e T con la stessa dimensione, contenenti x e paralleli a S, in particolare sono paralleli
tra loro e con intersezione non vuota (x ∈ T ∩ T ′ ), per cui si può usare il corollario (17.3).
⨳
(17.5) Nota. Nel caso in cui X = A2 (R), ritroviamo la proposizione (14.12) (quinto postulato di Euclide –
“assioma delle parallele”).
(17.6) Definizione. Due sottospazi affini S, T ⊂ X si dicono sghembi se non hanno punti in comune e non
sono paralleli.
(17.7) Proposizione. Siano S, T ⊂ X sottospazi affini di X. Se l’intersezione S ∩ T non è vuota, allora è un
sottospazio affine di X, la cui dimensione soddisfa la disuguaglianza
dim (S ) + dim (T ) ≤ dim ( X ) + dim (S ∩ T )
→
− →
−
→
−
Vale l’uguaglianza nella disequazione se e solo se dim ( S + T ) = dim ( X ).
Dim. Sia x0 ∈ S ∩ T . Allora risulta
→
−
S = x0 + S
→
−
T = x0 + T
da cui si deduce che
→
− →
−
S ∩ T = x0 + S ∩ T ,
−−−−→ →
− →
−
e quindi S ∩ T è un sottospazio affine con giacitura S ∩ T = S ∩ T . Ora, la formula di Grassmann (dimensioni
di sottospazi vettoriali di uno spazio di dimensione finita) dà
(17.8)
da cui si deduce
→
−
→
−
→
− →
−
→
− →
−
dim ( S ) + dim ( T ) = dim ( S + T ) + dim ( S ∩ T ),
→
− →
−
dim (S ) + dim (T ) = dim ( S + T ) + dim (S ∩ T )
≤ dim ( X ) + dim (S ∩ T ),
→
− →
−
→
−
dato che dim ( S + T ) ≤ dim ( X ) = dim ( X ). È altresì chiaro che vale l’uguaglianza quando vale l’uguaglianza
in quest’ultima disequazione.
⨳
(17.9) Nota. Osserviamo che dalla dimostrazione di (17.7) si può dedurre un metodo per calcolare la dimensione dell’intersezione di due sottospazi affini (calcolando il rango della matrice del sistema di equazioni).
→
− →
− →
−
(17.10) Proposizione. Siano S, T ⊂ X sottospazi affini di X tali che S + T = X . Allora l’intersezione S ∩ T
non è vuota.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
146
#9. TRASFORMAZIONI AFFINI, INCIDENZA E PARALLELISMO
Dim. Siano xS e xT punti di S e T rispettivamente. Un punto x ∈ X appartiene all’intersezione S ∩ T se e solo
→
−
→
−
se esistono v ∈ S e w ∈ T tali che
x = xS + v = xT + w,
→
−
→
−
cioè l’intersezione è non vuota se e solo se esistono v ∈ S e w ∈ T tali che
xT − xS = v − w.
→
− →
− →
−
→
−
→
−
→
−
Ma per ipotesi S + T = X , e dato che xT − xS ∈ X esistono s ∈ S e t ∈ T per cui
xT − xS = s + t.
→
−
→
−
Basta porre v = s ∈ S e w = −t ∈ T per ottenere le soluzioni v e w cercate.
⨳
→
−
→
−
(17.11) Definizione. Consideriamo un sottospazio affine S ⊂ X, S ̸= X e un sottospazio W ⊂ X tale che S ⊕
→
−
W = X (complemento). Allora si può definire la proiezione di X su S parallela a W , indicata con pS,W : X → S,
come segue: se x ∈ X, allora per (15.4) esiste unico il sottospazio affine T = T x,W passante per x con giacitura
→
− −−−→ →
−
→
−
W . L’intersezione S ∩ T x,W è non vuota per (17.10), e dato che S + T x,W = S + W = X per (17.7), la dimensione
è dim (S ∩ T x,W ) = 0, cioè consiste di un solo punto. Si può dunque definire la proiezione su S parallela a W
pS,W mediante la relazione
∀x ∈ X, pS,W ( x ) ∈ S ∩ T x,W .
→
−
(17.12) Definizione. In modo analogo definiamo la riflessione rS,W : X → X, lungo S parallela a W ⊂ X (con
→
−
→
−
S ⊕ W = X ), mediante la formula
−−−−−−−−→
rS,W ( x ) = pS,W ( x ) + x pS,W ( x )
(17.13) Proposizione. Riflessioni e proiezioni sono mappe affini. Le riflessioni sono affinità con la proprietà
che r 2 = r ◦ r = 1X . Se S è il sottospazio su cui si proietta (risp., lungo la quale si riflette), allora S rimane
fissata dalla proiezione (risp., dalla riflessione).
Dim. Cominciamo a mostrare che le proiezioni sono mappe affini: sia f = pS,W , dove S è un sottospazio affine
→
−
→
−
di X e W un sottospazio vettoriale di X complemento di S . È facile dedurre dalla definizione che se x ∈ S, allora
→
−
→
−
f ( x ) = x. Vogliamo mostrare che per qualche x ∈ X la mappa L : X → S definita da L(v) = f ( x + v) − f ( x )
è lineare in v. Per definizione {pS,W ( x + v)} = S ∩ T x+v,W e {pS,W ( x )} = S ∩ T x,W , dove T x,W e T x+v,W sono i
sottospazi con giacitura W passanti per x e x + v rispettivamente. Nulla ci vieta di considerare x ∈ S, per cui
→
− →
−
→
−
si ha f ( x ) = x. Dal momento che per ipotesi X = S ⊕ W , ogni v ∈ X si scrive in modo unico come v = s + w
→
−
con s ∈ S e w ∈ W . Ora, se w ∈ W , allora per ogni y ∈ X i sottospazi con giacitura W passanti per y e per
y + w coincidono
y + W = y + w + W,
e quindi
T x+v,W = T x+s+w,W = T x+s,W ,
→
−
da cui f ( x + v) = f ( x + s). Ma dato che x ∈ S e s ∈ S , anche x + s ∈ S, per cui f ( x + s) = x + s. Ma allora
f ( x + v) − f ( x ) = f ( x + s) − f ( x ) = x + s − x = s,
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
147
§ 17. INCIDENZA E PARALLELISMO
→
− →
−
→
−
cioè L(v) = s, ovvero L : X = S ⊕ W → S è la proiezione (vettoriale) sul primo fattore, ed è lineare.
Passiamo a dimostrare che le riflessioni sono affini: se r = rS,W è una riflessione X → X, allora si scrive
mediante la formula vista poco sopra
−−−−→
r ( x ) = p( x ) + x p( x ) = p( x ) + ( p( x ) − x )
dove p è la corrispondente proiezione parallela. Scelto x ∈ X, la corrispondente funzione L(v) = r ( x + v) −
r ( x ) è quindi uguale a
L(v) = p( x + v) + ( p( x + v) − ( x + v)) − ( p( x ) + ( p( x ) − x ))
= p( x + v ) − p( x ) + ( p( x + v ) − p( x ) − ( x + v ) + x )
= 2( p( x + v) − p( x )) − v,
che è lineare in v dato che p( x + v) − p( x ) lo è (e quindi è somma di funzioni lineari in v).
(17.14) Nota. Se K = R oppure K = C (con la topologia metrica), allora ogni spazio vettoriale V
→
−
la topologia data dal prodotto. Quindi, se X è uno spazio affine con spazio vettoriale associato X
→
−
possibile, fissato x0 ∈ X, definire una topologia su X tramite la biiezione X → X definita da
⨳
∼
= K n ha
∼
= K n, è
v 7→ x0 + v.
Si può mostrare che la topologia non dipende dalla scelta di x0 e che tutte le traslazioni sono omeomorfismi.
Quando non indicato altrimenti, uno spazio affine si intende munito della topologia di K n . In questo modo
si può facilmente vedere che tutte le mappe affini sono continue, e che le affinità sono omeomorfismi. Tutti
i sottospazi affini risultano chiusi (dato che sono controimmagini di 0 mediante mappe affini, cioè funzioni
continue).
(17.15) Esempio. In A3 (K ) con coordinate x, y, z, sia (α, β, −1) un vettore direzione. La proiezione parallela
a (α, β, −1) sul piano z = 0 associa a ( x, y, z ) l’intersezione tra la retta
α
x
y
β
:
t
∈
K
+
t
z
−1
e il piano z = 0, cioè
[
] [
] x
x
x
+
αz
1
0
α
y .
p : y 7→
=
y + βz
0 1 β
z
z
(17.16) Esempio. Proiettiamo A4 (K ) con coordinate x, y, z, w sul piano di equazioni w = 0, lungo la direzione
(a, b, c, −1). Facciamo seguire poi la proiezione di A3 (K ) con coordinate x, y, z (w = 0) sul piano di equazione
z = 0 parallelamente a (α, β, −1). Per la prima, si ha
a
x
b
∩
y
:
t
∈
K
+
t
{w = 0}
c
z
w
−1
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
148
#9. TRASFORMAZIONI AFFINI, INCIDENZA E PARALLELISMO
cioè
x
x + aw 1 0 0 a
y
7→ y + bw = 0 1 0 b
z
z + cw
0 0 1 c
w
La composizione è quindi descritta dal prodotto di matrici
[
] 1 0 0 a [
]
1 0 α
1 0 α a + αc
0 1 0 b =
0 1 β
0 1 β b + βc
0 0 1 c
Consideriamo invece la proiezione di A4 (K ) sul suo piano di equazioni z = w = 0, parallelo alla giacitura generata dai due vettori (a, b, c, −1), (α, β, −1, 0). La proiezione del punto ( x, y, z, w) è la soluzione in X, Y , Z, W
del sistema
X = x + sa + tα
Y = y + sb + tβ
Z = z + sc − t
W = w−s
W =0
Z=0
cioè
X = x + sa + tα
X = x + wa + (z + wc)α
Y = y + sb + tβ
Y = y + wb + (z + wc)β
⇐⇒
s=w
s=w
t = z + sc
t = z + wc
che è
X = x + αz + (a + αc)w
Y = y + βz + (b + βc)w.
La sua matrice rappresentativa è stata vista poco fa, infatti …
Può essere un buon modo per proiettare gli spigoli di un cubo di dimensione 4?
§ 17.1.
PROIEZIONI PARALLELE E NON DELLO SPAZIO SU UN PIANO
(i) proiezioni parallele:
Proiezione ortografica/ortogonale.
Proiezione obliqua (assonometrica):
proiezione isometrica/monometrica (che non è una isometria!).
assonometria cavaliera.
(ii) proiezioni non parallele:
Proiezione prospettica / prospettiva.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
149
§ 17. INCIDENZA E PARALLELISMO
O
K
G
C
P
L
H
D
M
I
E
A
N
J
F
B
Figura 9.1: Proiezione parallela di un ipercubo di dimensione 4: le facce sono AEMI, BFN J, CGOK, DHPL,
ACKI, BDLJ, EGOM, FHPN, ACGE, BDHF, IKOM, JLPN, ABJI, CDLK, EFN M, GHPO, ABFE,
CDHG, I JN M, KLPO, ABDC, EFHG, I JLK, MN PO.
http://en.wikipedia.org/wiki/Tesseract
(iii) proiezioni curvilinee (?)
http://en.wikipedia.org/wiki/Graphical_projection
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
150
#9. TRASFORMAZIONI AFFINI, INCIDENZA E PARALLELISMO
ESERCIZI
(9.1) Presi due punti p1 e p2 in uno spazio affine X, come osservato nelle note (15.9) e (15.16), si può definire
il punto p = λ1 p1 + λ2 p2 ogni volta che λ1 + λ2 = 1. Consideriamo il caso in cui il campo K = R. Dimostrare
che il punto ottenuto ponendo λ1 = λ2 = 1/2 è il punto medio del segmento con estremi p1 e p2 , cioè è tale
−→.
che −
p−1→
p=−
pp
2
(9.2) Proseguendo con l’esercizio precedente (spazio affine con coefficienti reali), i punti del segmento di
estremi p1 e p2 possono essere definiti come tutti i punti per cui esistono λ1 ≥ 0, λ2 ≥ 0 tali che λ1 + λ2 = 1 e
p = λ1 p1 + λ2 p2 . Dimostrare che ogni segmento è omeomorfo all’intervallo [0, 1] ⊂ R.
(9.3) Dimostrare che se S ⊂ X = An (R) è un sottospazio affine (proprio) e W un sottospazio complementare
→
− →
−
→
−
→
−
di S in X (cioè S ⊕ W = X ), allora se p indica la proiezione su S parallela a W e r la riflessione rispetto a S
parallela a W , allora per ogni x ∈ X il punto p( x ) è il punto medio del segmento con estremi x e r ( x ).
(9.4) Dimostrare che la riflessione r rispetto ad un sottospazio affine S fissa tutti i punti di S (cioè, per ogni
x ∈ S, r ( x ) = x).
[ ]
[ ] 0
[ ] 1
0
1
1
0
3
2
e
, 1 7→
, 0 7→
(9.5) Determinare, se esiste, la mappa affine da A (R) a A (R) tale che 0 7→
1
0
1
0
0
0
[ ]
1
0
1 7→ 0 .
1
(9.6) Determinare una mappa affine A2 (R) → A2 (R) che sia zero solo sulla retta di equazione x = y.
1 1/2 1/3
(9.7) Si determinino le equazioni cartesiane del piano di A3 (R) che passa per i tre punti 0, 1/2, 1/3.
1/3
0
0
(9.8) Dare un esempio di due rette sghembe in A4 (R). È possibile trovare due piani sghembi in A4 ? E due
sottospazi di dimensione 3?
(9.9) Trovare, se esistono, due piani paralleli di A4 (C).
1
x
(9.10) Esiste una retta r parallela alla retta di equazioni parametriche y = t 1 e incidente alle due rette di
1
z
x
1 x 0
0
equazioni y = t 0 e y = 1 + t 0?
z
0
z
0
1
0
x 1
3
(9.11) Si scriva l’equazione (cartesiana) della retta di A (R) di equazione y = 1 + t 0.
0
1
z
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
151
Esercizi
(9.12) Determinare la dimensione dell’intersezione dei due piani di A4 (R) (con coordinate x1 , x2 , x3 , x4 ) di
equazioni
1
1
x1 1
1
x 1
x1 − x3 = 1
2 = + u + v 0 .
e
0
1
x3 0
x2 − x4 = 1
1
1
0
x4
(9.13) Scrivere le equazioni parametriche (del primo) e le equazioni cartesiane (del secondo) dei due piani
dell’esercizio precedente (9.12).
2 1 1
3
(9.14) Determinare il valore del parametro k per cui i tre punti di A (R) 1, k , 1. sono allineati. Scrivere
k 0 0
l’equazione della retta per questi tre punti in forma parametrica e cartesiana.
*(9.15) Dimostrare che una affinità manda sottospazi paralleli in sottospazi paralleli, sottospazi incidenti in
sottospazi incidenti, sottospazi sghembi in sottospazi sghembi. È vero anche per una mappa affine?
(9.16) Sia X è uno spazio affine. Mostrare che se una funzione f : X → X è una affinità allora manda terne
−−→ −−→ −−−→ −−−→
di punti allineati ABC in terne di punti allineati A′ B′C ′ , e i rapporti sono invarianti AC : AB = A′C ′ : A′ B′ .
Dedurre che le mediane di un triangolo si incontrano in un punto (il baricentro), mandando ABC in un triangolo
isoscele (o equilatero). (cfr. proposizione (16.15) a pagina 142)
(9.17) Sia GA(n, R) il gruppo affine su X = An (R), e A ∈ An (R) un punto. Qual è lo stabilizzatore di A in
GA(n, R)? Qual è l’orbita di A in X? L’azione è transitiva? Si consideri l’azione di GA(n, R) su X × X definita
ponendo f ( A, B) = ( f ( A), f ( B)) per ogni f ∈ GA(n, R) e per ogni ( A, B) ∈ X 2 . Al variare di ( A, B) ∈ X 2 ,
quali sono lo stabilizzatore e l’orbita di ( A, B)? L’azione è transitiva? Si consideri l’azione di GA(n, R) su
X × X × X definita ponendo f ( A, B, C ) = ( f A, f B, f C ) per ogni f ∈ GA(n, R) e per ogni A, B, C ∈ X. Al
variare di ( A, B, C ) ∈ X 3 , quali sono lo stabilizzatore e l’orbita di ( A, B, C )?
(9.18) Trovare una mappa affine A3 (R) → A2 (R) che manda due rette sghembe in due rette parallele. È
possibile mandare due rette parallele in due rette incidenti e distinte? E in due rette coincidenti? Viceversa, è
possibile mandare due rette incidenti (distinte) in due rette parallele (distinte)?
x 1 0
x 0 0
x 0 1
(9.19) Siano in A3 (R) date le rette di equazioni: r1 : y = 0 + t 1, r2 : y = 1 + t 0 e r3 : y = 0 + t 0.
z
0
0
z
0
1
z
1
0
Quali di queste rette sono sghembe, parallele, incidenti? Trovare una affinità A: A3 (R) → A3 (R) tale che
A(r1 ) = r2 , A(r2 ) = r3 e A(r3 ) = r1 .
(9.20) Dimostrare che se f : X → Y è una mappa affine e T ⊂ Y un sottospazio affine di Y , allora f −1 (T ) è
un sottospazio affine di X (Vedi proposizione (16.14)).
(9.21) Siano A, B due punti distinti in uno spazio affine su campo K. Se P è allineato ad A e B, mostrare che
−−→ −−→ −−→ −−→
(i) AP : AB + BP : BA = 1.
−−→ −−→ −−→ −−→
(ii) ( AP : AB) · ( AB : AP ) = 1
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
152
#9. TRASFORMAZIONI AFFINI, INCIDENZA E PARALLELISMO
−−→ −−→
AP : AB
−−→ −−→
(iii) PA : PB = − −−→ −−→
BP : BA
(cfr. esercizio (8.14) a pagina 136)
(9.22) Siano A, B, C tre punti non collineari in uno spazio affine, e Q un punto di coordinate baricentriche
(λ0 , λ1 , λ2 ) (rispetto ad A, B, C):
Q = λ0 A + λ1 B + λ2C,
1
(λ1 B + λ2C ) è un
con λ0 + λ1 + λ2 = 1. Sia Q ̸= A. Mostrare che se λ1 + λ2 ̸= 0, allora il punto Q′ =
λ1 + λ2
punto della retta BC allineato con QA. Quando λ1 + λ2 = 0 cosa succede?
(Per i prossimi due teoremi, si ragioni come per l’esercizio (9.16), cercando una trasformazione affine che
manda il triangolo in un triangolo più semplice e osservando che le affinità conservano i rapporti di tre punti;
si ricordi anche la definizione di rapporto di tre punti allineati)
*(9.23) (Teorema di Ceva* ) Siano A, B e C tre punti non allineati in un piano affine su campo K, e P AB , P BC
e PC A tre punti sulle rette AB, BC e C A rispettivamente, distinti da A, B, C. Dimostrare che le tre rette AP BC ,
BPC A e CP AB si incontrano in un punto se e solo se
−−−−→ −−−−→ −−−−→
AP AB BP BC CPC A
−−−−→ −−−−→ −−−−→ = 1
P AB B P BC C PC A A
(osserviamo che come corollario le mediane si incontrano in un punto: il baricentro). Provare anche a dimostrare questo teorema in coordiante baricentriche.
*(9.24) (Teorema di Menelao† ) Siano A, B e C tre punti non allineati in un piano affine su campo K, e P AB ,
P BC e PC A tre punti sulle rette per AB, BC e C A rispettivamente, distinti da A, B e C. Dimostrare che i tre punti
P AB , P BC e PC A sono allineati se e soltanto se
−−−−→ −−−−→ −−−−→
AP AB BP BC CPC A
−−−−→ −−−−→ −−−−→ = −1.
P AB B P BC C PC A A
*(9.25) Sia φ : R → R un automorfismo di anelli, cioè una bijezione tale che per ogni x, y ∈ R, si ha φ( xy) =
φ( x )φ(y) e φ( x + y) = φ( x ) + φ(y). Mostrare i seguenti fatti.
(i) Per ogni k ∈ Z, φ(k ) = k.
(ii) Per ogni q ∈ Q, φ(q) = q.
√
(iii) Se x < y, allora φ( x ) < φ(y) (si consideri t = y − x, e si osservi che 0 < φ( t )2 = φ(t )).
(iv) La funzione φ è continua R → R.
(v) Per ogni x ∈ R, si ha φ( x ) = x, cioè φ è l’identità 1R .
**(9.26) Sia X ∼
= A2 (K ) un piano affine a coefficienti in K e sia f : X → X è una bijezione che manda terne di
punti allineati in terne di punti allineati. Dimostrare le seguenti affermazioni.
* Giovanni
† Menelao
Ceva (1647 – 1734).
di Alessandria (~70–140).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
153
Esercizi
−−→
−−→
(i) Se A, B, C sono tre punti di X non allineati, siano r la retta passante per A + x AB parallela a AC, e s la
−−→
−−→
−−→ −−→
retta passante per A + y AC parallela a AB. Allora r e s si intersecano nel punto A + x AB + y AC ∈ X.
−−→ −−→
−−→
(ii) Sia D = A + AB + AC. Per ( x, y) ∈ K 2 , sia t la retta passante per A + x AD parallela alla retta che passa
−−→
−−→
per D e A + y AB. Allora t interseca la retta AB nel punto A + xy AB.
(iii) La funzione f manda rette di X in rette di X (usare la suriettività di f ).
(iv) La funzione f : X → X manda rette parallele in rette parallele.
(v) Se f ( A) = A′ , f ( B) = B′ e f (C ) = C ′ , allora A′ B′C ′ è un riferimento affine per X (cioè A′ B′C ′ non
sono allineati).
(vi) A meno di comporre f con una affinità g: X → X, possiamo suppore, da adesso in poi, che f ( A) =
A′ = A, f ( B) = B′ = B e f (C ) = C ′ = C.
→
−
→
−
→
−
(vii) La funzione f : K 2 → K 2 definita ponendo f ( v) = f ( A + v) − f ( A) è ben definita e additiva: f ( v +
→
−
→
−
w) = f ( v) + f ( w).
−−→
−−→
−−→
−−→
(viii) Esistono due funzioni φ e ψ tali che f ( A + x AB) = A + φ( x ) AB e f ( A + y AC ) = A + ψ (y) AC, e quindi
→
−
anche f ( x, y) = (φ( x ), ψ (y)).
(ix) Dato che la retta OD va in sé, risulta φ( x ) = ψ ( x ) per ogni x ∈ K, e φ : K → K è una bijezione.
(x) Per ogni ( x, y) ∈ K 2 , si ha φ( xy) = φ( x )φ(y) e φ( x + y) = φ( x ) + φ(y).
(xi) Se K = R, la funzione φ( x ) è l’identità φ( x ) = x. (si veda l’Esercizio (9.25))
(xii) (Teorema (16.17) a pagina 144): se f : Ad (R) → Ad (R) manda tre punti allineati qualsiasi in tre punti
allineati, allora è una affinità. (suggerimento: utilizzare i punti precedenti, oppure cercare un libro in
biblioteca in cui la dimostrazione viene svolta…)
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
154
#9. TRASFORMAZIONI AFFINI, INCIDENZA E PARALLELISMO
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
Settimana N° 10
SPAZI EUCLIDEI E ISOMETRIE
§ 18.
SPAZI AFFINI EUCLIDEI E ISOMETRIE
(Cfr.)*
(18.1) Definizione. Uno spazio vettoriale euclideo è uno spazio vettoriale E di dimensione finita su campo
R, munito di una forma bilineare definita positiva e simmetrica (cioè b : E × E → R è simmetrica e bilineare,
e ∀x ̸= 0, b( x, x) > 0). Scriviamo
b( x, y) = ⟨x, y⟩ = x · y
e chiamiamo questo numero il prodotto scalare di x con y.†
(18.2) Definizione. La norma di un vettore x è definita da |x| = ∥x∥ =
√
x · x.
(18.3) Definizione. Se x · y = 0, allora x e y sono ortogonali. Un insieme di vettori {e1 , e2 , . . . , en } ⊂ E si dice
ortogonale se i suoi elementi sono a due a due ortogonali: ∀i, j, i ̸= j =⇒ ei · e j = 0, e ortonormale se è
ortogonale e in più i vettori hanno norma uno, cioè ∀i, |ei | = 1. Se l’insieme di vettori {e1 , e2 , . . . , en } è una
base per E, allora si dice che la base è ortogonale (risp. ortonormale) quando lo è come insieme di vettori.
(18.4) Esempio. L’esempio standard di spazio vettoriale euclideo è E = Rn , con il prodotto scalare canonico
dato da
x1 y1
x y
n
∑
2 2
⟨ . , . ⟩ =
xi yi ,
.. ..
i=1
xn yn
ossia ei · e j = δi j .
(18.5) Esempio. Consideriamo lo spazio E di tutti i polinomi a coefficienti reali di grado al più n:
p( x ) = a0 + a1 x + a2 x 2 + . . . + an x n .
* Cfr:
† Una
Sernesi, Vol I, Cap 2 [1].
forma bilineare simmetrica non è un prodotto scalare, se non è definita positiva.
155
156
#10. SPAZI EUCLIDEI E ISOMETRIE
Figura 10.1: Icosaedro e dodecaedro
È uno spazio vettoriale su R rispetto alla somma di polinomi e al prodotto per uno scalare. Se p, q ∈ E, sia
∫ 1
p(t )q(t ) dt.
⟨p, q⟩ =
0
È uno prodotto scalare? È certamente bilineare, simmetrica e definito positivo (per esercizio i dettagli: basta
osservare che l’integrale di una funzione positiva o nulla p2 è nullo solo se la funzione è zero, e se un polinomio
è zero in [0, 1], allora è il polinomio nullo). Esiste una base ortonormale in E? Come trovarla?
(18.6) (Disuguaglianza di Cauchy-Schwartz e disuguaglianza triangolare) Per ogni x, y ∈ E si ha:
|⟨x, y⟩| ≤ |x||y|
|x + y| ≤ |x| + |y|.
Quindi la norma è una norma nel senso di (12.18) a pagina 99. E la distanza definita su E da d ( x, y) = |x − y|
è una metrica (che rende E spazio topologico, con la topologia metrica), nel senso di (2.1) a pagina 5.
Dim. Esercizio (10.3).
⨳
(18.7) Il prodotto scalare e la norma sono legate dalle due identità (equivalenti)
|x + y|2 = |x|2 + |y|2 + 2⟨x, y⟩
)
1(
|x + y|2 − |x|2 − |y|2 .
⟨x, y⟩ =
2
→
−
(18.8) Definizione. Uno spazio affine euclideo è uno spazio affine ( X, X ) per cui lo spazio delle traslazioni
→
−
(dei vettori) X è uno spazio vettoriale euclideo. Un riferimento affine {A0 , A1 , . . . , An } di X è ortonormale se
−−−−→ −−−−→
−−−−→
→
−
( A0 A1 , A0 A2 , . . . , A0 An ) è una base ortonormale per X . Allora X è uno spazio metrico con la metrica definita
da
−−→
d ( A, B) = | AB|,
→
−
dove la norma è la norma euclidea in X .
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
157
§ 18. SPAZI AFFINI EUCLIDEI E ISOMETRIE
(18.9) Definizione (Spazio euclideo En ). Se Rn ha il prodotto scalare standard, allora lo spazio affine An (R)
è uno spazio affine euclideo, che indichiamo con il simbolo En .
Una isometria tra spazi affini non è altro che una funzione biunivoca che conserva le distanze, e quindi:
(18.10) Definizione. Una isometria tra due spazi affini euclidei f : X → Y è una biiezione tale che per ogni
A, B ∈ X, | f ( A) − f ( B)|Y = |A − B|X (dove la norma | · |X è la norma di X e la norma | · |Y è la norma di Y ).
Abbiamo visto che per (12.18) tutte le metriche indotte da prodotti scalari di E sono tra loro equivalenti, e
quindi inducono la stessa topologia. In realtà due spazi euclidei con prodotti scalari qualsiasi risultano sempre
isometrici, come segue dal seguente lemma.
(18.11) Ogni spazio affine euclideo di dimensione n è isometrico allo spazio standard En (con il prodotto
scalare standard).
→
−
Dim. Sia X uno spazio affine euclideo di dimensione n. Scelto un punto O ∈ X, si ha la biiezione X ∼
= X data
da
−−→ →
−
x ∈ X 7→ Ox ∈ X .
→
−
Ora, lo spazio vettoriale euclideo X ha sicuramente una base ortonormale (per esempio, con il processo di
ortogonalizzazione di Gram-Schmidt) {e1 , e2 , . . . , en } ⊂ E, mediante la quale si può scrivere un isomorfismo
→
−
f: X ∼
= Rn
definito da
⟨v, e1 ⟩
⟨v, e ⟩
2
f ( v) =
. . .
⟨v, en ⟩
→
−
La composizione X → X → Rn ∼
= En è una isometria. Vediamo per prima cosa come è definita. Se x ∈ X, il
→
−
vettore associato in X è x − O, che viene mandato da f in
⟨x − O, e1 ⟩
⟨x − O, e ⟩
2
f ( x − O) =
.
...
⟨x − O, en ⟩
Ora, presi x, y ∈ X, se definiamo per ogni i = 1, . . . , n i numeri xi = ⟨x − O, ei ⟩ e yi = ⟨y − O, ei ⟩ , si ha che
x−O =
n
∑
xi ei
i=1
y−O =
n
∑
yi ei ,
i=1
e quindi
x1
x2
f ( x − O) = . ∈ Rn
..
xn
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
158
#10. SPAZI EUCLIDEI E ISOMETRIE
y1
y
2
f (y − O) = . ∈ Rn
..
yn
da cui segue che
−
d X ( x, y) = |x − y|→
X
−
= |( x − O) − (y − O)|→
X
n
∑
−
=|
( xi − yi ) ei |→
X
i=1
v
u
t∑
n
n
∑
= ⟨ ( xi − yi ) ei ,
(x j − y j )e j ⟩
i=1
=
v
u
t∑
n
j=1
( xi − yi )( x j − y j )⟨ei , e j ⟩
i, j=1
=
v
t n
∑
( xi − yi )2
i=1
= | f ( x ) − f (y)|Rn = dRn ( f ( x ), f (y)).
⨳
(18.12) Teorema. Siano X e Y spazi affini euclidei e f : X → Y una isometria (cioè una biiezione tale che
| f ( x ) − f (y)|Y = |x − y|X per ogni x, y ∈ X). Allora f è un isomorfismo affine (una trasformazione affine
invertibile).
Dim. Cominciamo a mostrare che f è una mappa affine, cioè, per la definizione (16.1), che per ogni x ∈ X la
→
−
→
−
funzione indotta sugli spazi vettoriali sottostanti X → Y definita da
→
−
→
−
v ∈ X 7→ f ( x + v) − f ( x ) ∈ Y
→
−
→
−
è lineare. In realtà, per (16.5), basta farlo vedere per un solo x0 ∈ X. Sia T : X → Y la funzione definita da
→
−
T ( v) = f ( x0 + v) − f ( x0 ). Per ipotesi si ha che per ogni v ∈ X
− = | ( x 0 + v) − x 0 | X
|v|→
X
= | f ( x0 + v) − f ( x0 )|Y
−,
= |T ( v)|→
Y
e quindi la trasformazione T conserva la norma. Osserviamo anche che per v = 0 questo implica che |T (0)| = 0,
→
−
→
−
e quindi T (0) = 0 (dove qui con un abuso di notazione usiamo in simbolo 0 sia per indicare 0X ∈ X che 0Y ∈ Y ).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
159
§ 18. SPAZI AFFINI EUCLIDEI E ISOMETRIE
→
−
Se v, w ∈ X sono due vettori, allora si ha
− = |( x0 + v) − ( x0 + w)|X
|v − w|→
X
= | f ( x0 + v) − f ( x0 + w)|Y
= | f ( x0 + v) − f ( x0 ) + f ( x0 ) − f ( x0 + w)|Y
−,
= |T ( v) − T ( w)|→
Y
cioè
|T ( v) − T ( w)|2 = |v − w|2 .
→
−
Per la formula del parallelogramma (18.7), si ha quindi per ogni v, w ∈ X
−2⟨T ( v), T ( w)⟩ = |T ( v) − T ( w)|2 − |T ( v)|2 − |T ( w)|2
= |v − w|2 − |v|2 − |w|2
= −2⟨v, w⟩,
cioè T conserva anche il prodotto scalare (non solo la norma).
→
−
Non rimane che finire dimostrando che T è lineare: siano a, b ∈ R due scalari e v, w ∈ X due vettori.
→
−
Allora, per ogni scelta di un terzo vettore e ∈ X si ha
⟨T (av + bw), T ( e)⟩ = ⟨av + bw, e⟩
= a⟨v, e⟩ + b⟨w, e⟩,
ed anche
⟨aT ( v) + bT ( w), T ( e)⟩ = a⟨T ( v), T ( e)⟩ + b⟨T ( w), T ( e)⟩
= a⟨v, e⟩ + b⟨w, e⟩,
→
−
cioè per ogni e ∈ X si ha
⟨T (av + bw), T ( e)⟩ = ⟨aT ( v) + bT ( w), T ( e)⟩.
Ora, dato che f è una biiezione, anche T lo è, per cui necessariamente deve essere
T (av + bw) = aT ( v) + bT ( w),
e quindi T è lineare. Per mostrare che è un isomorfismo, basta notare che è una biiezione, per cui esiste l’inversa
(che è naturalmente una isometria – vedi anche la definizione (16.6)).
⨳
(18.13) Una isomorfismo affine f : X → Y è una isometria se e soltanto se l’applicazione lineare associata
L : v 7→ f ( x + v) − f ( x ) è una trasformazione ortogonale (cioè una trasformazione lineare che conserva la
norma o, equivalentemente, il prodotto scalare).
Dim. Nella dimostrazione della proposizione precedente (18.12) abbiamo di fatto dimostrato anche che la
trasformazione L associata ad una isometria conserva il prodotto scalare e le norme (abbiamo usato questa
proprietà per mostrare che è lineare), e cioè che è una trasformazione ortogonale. Viceversa, supponiamo che
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
160
#10. SPAZI EUCLIDEI E ISOMETRIE
un isomorfismo affine f : X → Y abbia la proprietà che la trasformazione lineare associata L sia ortogonale.
→
−
Allora L( v − w) = L( v) − L( w) per ogni v, w ∈ X , e quindi per ogni x = x0 + v e y = x0 + w in X si ha
| f ( x ) − f (y)| = | f ( x0 + v) − f ( x0 + w)|
= | f ( x0 + v) − f ( x0 ) + f ( x0 ) − f ( x0 + w)|
= |L( v) − L( w)|
= |v − w|
= |x0 + v − ( x0 + w)|
= |x − y|,
cioè f è una isometria.
⨳
(18.14) Proposizione. Le isometrie tra spazi (affini) euclidei si scrivono, scelti sistemi di riferimenti ortonormali, come
x 7→ Ax + b,
dove A ∈ O(n) è una matrice ortogonale e b un vettore.
Dim. Come la dimostrazione di (16.10) (esercizio (10.2)).
⨳
(18.15) Le traslazioni sono isometrie.
Dim. Vedi esercizio (10.4).
⨳
Dato che una matrice ortogonale A ∈ O(n) ha determinante uguale a ±1, la parte lineare di una isometria
di En può avere determinante 1 oppure −1 (cioè essere in SO(n) oppure no).
(18.16) Definizione. Una isometria En → En rappresentata in un sistema di riferimento da x 7→ Ax + b è
detta diretta se det A = 1 (cioè A ∈ SO(n) ⊂ O(n)), altrimenti è detta inversa.
Se x è la n-upla di coordinate rispetto ad un sistema di riferimento euclideo (ortonormale) e x ′ è la n-upla
di coordinate dello stesso punto rispetto ad un altro riferimento, si ha
x = Qx ′ + c
per una certa matrice ortogonale Q e un punto/vettore c. Allora la mappa x 7→ Ax + b si scrive, ponendo
y = Ax + b, e y = Qy′ + c
y = Ax + b
Qy′ + c = A(Qx ′ + c) + b
Qy′ = AQx ′ + Ac + b − c
y′ = Q−1 AQx ′ + Q−1 ( Ac + b − c).
Ovviamente, se A è ortogonale, anche Q−1 AQ lo è, dato che si ha Qt = Q−1 e At = A−1
[Q−1 AQ]t [Q−1 AQ] = Qt At QQ−1 AQ =
= Qt At AQ = Qt Q = I.
Il determinante di Q−1 AQ è uguale al determinante di A, e quindi Q−1 AQ ∈ SO(n) ⇐⇒ A ∈ SO(n).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
161
§ 18. SPAZI AFFINI EUCLIDEI E ISOMETRIE
(18.17) Proposizione. La composizione di due isometrie dirette è una isometria diretta. La composizione di
una isometria diretta con una inversa è una isometria inversa. La composizione di due isometrie inverse è una
isometria diretta.
Dim. L’affermazione è equivalente alla seguente: se associamo ad una isometria il determinante della matrice
associata, otteniamo un omomorfismo di gruppi (rispetto alla composizione di isometrie e al prodotto di numeri). Osserviamo che la matrice A di cui calcoliamo il determinante è la matrice della trasformazione lineare
→
−
f associata alla trasformazione affine (isometrica) f : En → En . Ora, dimostriamo questa proposizione in
→
−
generale: l’applicazione f 7→ f che manda una affinità nella sua mappa lineare associata è un omomorfismo
di gruppi (dal gruppo affine al gruppo lineare): infatti se si hanno f : X → X e g: X → X, con corrispondenti
→
− →
−−−→
f e −g , allora g ◦ f è definita da
−−−→
g ◦ f ( v) = g( f ( x0 + v)) − g( f ( x0 ))
→
−
per x0 ∈ X. Tenuto conto che per ogni x ∈ X e v ∈ X si ha
→
−
f ( x + v) = f ( x ) + f ( v)
−g ( v),
g( x + v) = g( x ) + →
deduciamo che
→
−
g( f ( x0 + v)) = g( f ( x0 ) + f ( v))
−
−g (→
= g( f ( x )) + →
f ( v))
0
−−−→
−
→
−
−g ◦ →
e quindi g ◦ f = →
f . In particolare, quindi, l’applicazione f 7→ f è l’omomorfismo tra il gruppo delle affinità di An (R) e il gruppo GL(n, R). La restrizione di questo omomorsfismo alle isometrie è ancora
un omomorfismo. La dimostrazione si completa considerando che la funzione determinante è a sua volta un
omomorfismo, e questo è il teorema di Binet (det ( AB) = det ( A) det ( B)).
⨳
(18.18) Esempio. Le isometrie dirette del piano euclideo E2 si scrivono dunque come
[ ] [
][ ] [ ]
y1
cos θ − sin θ x1
b
=
+ 1 .
y2
sin θ cos θ x2
b2
Se b1 = b2 = 0, si tratta di una rotazione attorno all’origine. Altrimenti, cerchiamo i punti fissati dall’isometria,
cioè le soluzioni dell’equazione
Ax + b = x
(I − A) x = b.
Dato che, se A ̸= I, la rotazione A non ha autovalore 1 (cioè non fissa nessun vettore diverso dallo zero), quindi
la matrice I − A ha nucleo banale, e dunque è invertibile. La matrice I − A risulta quindi invertibile se A ̸= I,
altrimenti è la matrice nulla. Ma allora se A ̸= I esiste un unico punto fissato dalla isometria (la soluzione
di (I − A) x = b), che chiamiamo q. Trasliamo il sistema di riferimento, portando l’origine in q: x = x ′ + q.
L’isometria si scriverà quindi
y = Ax + b
y′ + q = A( x ′ + q) + b
y′ = Ax ′ + ( A − I )q + b = Ax ′ ,
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
162
#10. SPAZI EUCLIDEI E ISOMETRIE
cioè è una rotazione attorno a q. Quindi se A ̸= I si ha sempre una rotazione (anche se b ̸= 0). In particolare,
la composizione di una rotazione con una traslazione è ancora una rotazione! Attenzione che la composizione
di rotazioni attorno allo stesso centro è commutativa, la composizione di traslazioni è commutativa, ma non la
composizione di rotazioni e traslazioni:
x 7→ Ax 7→ Ax + b
x 7→ x + b 7→ A( x + b) = Ax + Ab.
Cosa succede per rotazioni con centri diversi (si veda l’esercizio (10.22))?
Le isometrie del piano euclideo che non sono dirette sono le riflessioni attorno a rette (se fissano una retta,
simmetrie assiali) e le glissoriflessioni (se non fissano alcun punto), che sono composizione di una riflessione
e di una traslazione lungo la direzione dell’asse di simmetria.
(18.19) Esempio. In E3 , l’isometria di equazione y = Ax + b è una rotazione (attorno ad una retta per l’origine)
se A ̸= I e b = 0, dato che A ∈ SO(3). Altrimenti, come sopra un punto x fissato dalla isometria risolve
l’equazione (I − A) x = b. Ma ogni rotazione A ∈ SO(3), se non banale, ha un autovettore con autovalore 1
(cioè fissa un vettore di R3 , e quindi tutta la retta generata dallo stesso). Quindi la matrice I − A non è mai
invertibile. Se A ̸= I, il rango sarà 1 o 2. Certamente la direzione parallela all’asse di rotazione sarà nel nucleo
di I − A. È possibile vedere (con un cambio di coordinate: esercizio) che I − A ha rango 2 e ha per sottospazio
immagine il piano ortogonale all’asse di rotazione. Quindi, se b è un vettore ortogonale all’asse di rotazione, ci
sono punti fissati (una retta di punti fissati). Altrimenti, no. Nel primo caso, si tratta di una rotazione attorno ad
una retta (non non necessariamente per l’origine), nel secondo caso? Scriviamo b come somma di due vettori
b = b1 + b2 , il primo ortogonale alla direzione fissata (e quindi nell’immagine di I − A) e il secondo b2 parallelo
alla direzione fissata (e quindi nel nucleo di I − A). Allora y = Ax + b = ( Ax + b1 ) + b2 . L’isometria y = Ax + b
si scrive quindi come composizione
x 7→ Ax + b1 7→ ( Ax + b1 ) + b2 ,
dove la prima è una rotazione attorno ad una retta di E3 , e la seconda è una traslazione lungo la direzione
b2 (che è diversa da zero dato che b per ipotesi non è ortogonale all’asse). Si tratta dunque di un avvitamento
lungo la direzione b2 . Quindi le isometrie dirette di E3 sono le traslazioni, le rotazioni e gli avvitamenti (twist).
Provare per esercizio a cercare/classificare le isometrie non dirette di E3 (riflessioni, glissoriflessioni,
rotoriflessioni, …).
§ 19.
ANGOLI E PROIEZIONI ORTOGONALI
(19.1) Definizione. Con il prodotto scalare definito su uno spazio euclideo non solo si possono misurare le
distanze tra punti, e quindi in generale lunghezze, ma anche gli angoli (orientati) tra vettori, mediante la formula
cos θ =
⟨v, w⟩
.
|v||w|
Questo consente di calcolare l’angolo, per esempio in A, di un triangolo ABC, moltiplicando (mediante prodotto
−−→ −−→
scalare) i vettori AB e AC.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
163
§ 19. ANGOLI E PROIEZIONI ORTOGONALI
Occorre notare che l’angolo è definito cosí a meno di segno (cioè non è l’angolo orientato) e a meno di 2kπ
(non c’è differenza tra angolo nullo e angolo giro). Non si tratta della definizione della geometria elementare
di misura di un angolo.
(19.2) Nota. Ricordiamo che in uno spazio metrico X la distanza tra un punto p e un sottoinsieme S ⊂ X è
definita con l’estremo inferiore delle distanze d ( p, x ), al variare di p in S. In particolare, se X è uno spazio
euclideo, si può definire la distanza di un punto p ∈ X da una retta, da un piano,…, da un sottospazio affine
S ⊂ X proprio come l’estremo inferiore delle distanze tra punti di S e il punto p.
(19.3) Definizione. Due sottospazi U, W di uno spazio vettoriale euclideo E si dicono ortogonali se per ogni
u ∈ U, per ogni v ∈ V i vettori u e v sono ortogonali, cioè il prodotto scalare ⟨u, v⟩ è nullo.
Sia U ⊂ E un sottospazio, e e1 , . . . , ek una sua base ortonormale. La funzione
π: E → U
definita da
π ( v) =
k
∑
⟨v, e j ⟩e j
j=1
gode delle seguenti proprietà:
(i) π è un omomorfismo di spazi vettoriali (cioè è lineare).
(ii) v ∈ U =⇒ π ( v) = v.
(iii) ker π = {v ∈ E : ∀u ∈ U, ⟨u, v⟩ = 0}
(iv) ker π è il complemento ortogonale di U: U ⊕ ker π = E.
Si ha
π (av + bw) =
k
∑
⟨av + bw, e j ⟩e j
j=1
=
k
∑
(a⟨v, e j ⟩ + b⟨w, e j ⟩) e j
j=1
=a
k
∑
k
∑
⟨v, e j ⟩e j + b ⟨w, e j ⟩e j
j=1
j=1
= aπ ( v) + bπ ( w).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
164
Inoltre se u ∈ U, allora u =
#10. SPAZI EUCLIDEI E ISOMETRIE
∑k
i=1 ui ei
e quindi
π ( u) =
k
∑
⟨u, e j ⟩e j
j=1
=
k ∑
k
∑
⟨ ui ei , e j ⟩e j
j=1 i=1
=
k ∑
k
∑
ui ⟨ei , e j ⟩e j
j=1 i=1
=
k
∑
ui
k
∑
i=1
=
k
∑
⟨ei , e j ⟩e j
j=1
ui ei = u
i=1
Infine, v ∈ ker π se e soltanto se ⟨v, e j ⟩ = 0 per ogni j = 1, . . . , k. Quindi se u ∈ U e v ∈ ker π, si ha
∑
u = kj=1 u j e j e quindi
k
∑
⟨v, u⟩ = ⟨v,
u j ej⟩
j=1
=
k
∑
u j ⟨v, e j ⟩
j=1
=
k
∑
u j 0 = 0,
j=1
e dunque v e u sono ortogonali. Cioè se v ∈ ker π, allora v è ortogonale a tutti gli elementi di U. Viceversa, se
v è ortogonale a tutti gli elementi di U, in particolare è ortogonale ai k elementi e1 , …, ek , e quindi π ( v) = 0.
Per finire: per ogni v ∈ E si ha
v = π ( v) + ( v − π ( v)),
dove u = π ( v) ∈ U e
π ( v − π ( v)) = π ( v − u)
= π ( v) − π ( u)
= u − u = 0.
Da questo segue che U + ker π = E. La somma è diretta, perché se ci fosse u ∈ U ∩ ker π, si avrebbe π ( u) = 0
e anche π ( u) = u, da cui u = 0.
→
−
(19.4) Definizione. Sia S ⊂ En un sottospazio affine di uno spazio affine euclideo con giacitura S ⊂ Rn .
→
−
→
−
→
−
Sia W il complemento ortogonale di S in Rn , cioè l’unico sottospazio ortogonale a S tale che S ⊕ W = Rn .
Allora per ogni x ∈ En si può definire la proiezione su S parallela al complemento ortogonale W , seguendo la
definizione (17.11)
pS,W : En → S.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
165
§ 19. ANGOLI E PROIEZIONI ORTOGONALI
Questa proiezione si chiama proiezione ortogonale di En su S ⊂ En . Dal momento che il complemento
ortogonale W esiste ed è unico, la proiezione è unicamente determinata da S.
(19.5) Sia r ⊂ En una retta (sottospazio affine di dimensione 1) di uno spazio affine euclideo con giacitura
→
−
S = ⟨v⟩ ⊂ Rn e A un punto di r. Allora la proiezione di un punto x ∈ En sulla retta r si scrive come
pS ( x ) = A +
⟨x − A, v⟩
v.
⟨v, v⟩
Dim. La proiezione di x su r è un punto Q di r per cui Q − x è ortogonale a r. È facile vedere che tale punto
Q è unico (altrimenti si formerebbe un triangolo con due lati di 90◦ ). Dobbiamo trovare un punto Q per cui
⟨x − Q, v⟩ = 0
e quindi, dato che Q = A + tv per un certo t ∈ R, tale che ⟨x − ( A + tv), v⟩ = 0, ovvero
⟨x − A, v⟩ − t⟨v, v⟩ = 0.
Ma allora per t =
⟨x − A, v⟩
(v ̸= 0!) si ottiene il punto cercato
⟨v, v⟩
pS ( x ) = Q = A +
⟨x − A, v⟩
v
⟨v, v⟩
come annunciato.
⨳
(19.6) Definizione. Se pS è la proiezione ortogonale
pS : En → S ⊂ En
definita sopra, allora si può definire come in (17.12) l’isometria (i.e. trasformazione ortogonale)
rS : x 7→ pS ( x ) + ( pS ( x ) − x ),
chiamata riflessione attorno a S * . È una involuzione (cioè rS2 è la trasformazione identica, l’identità) che fissa
S.
(19.7) Sia S ⊂ En un sottospazio affine di uno spazio affine euclideo, e p ∈ En un punto non di S. Allora la
distanza di p da S è uguale alla distanza di p dall’unico punto q di S per cui il vettore p − q è ortogonale a S
(cioè la proiezione ortogonale di p su S – dove q è il punto di S con minima distanza da p).
Dim. Supponiamo che la distanza di p sulla sua proiezione q sia maggiore di quella tra p e un terzo punto A.
→
→
−
→ per definizione è ortogonale a S, è ortogonale anche al vettore −
Dal momento che −
qp
qA, che appartiene a S
* Di
solito si chiama riflessione una trasformazione isometrica di questo tipo solo quando la dimensione di S è uguale a n − 1 –
come se S fosse uno specchio. Per esempio, se S è un punto, quello che si trova è una inversione centrale, per cui la scelta del nome
non sembrerebbe appropriata. Se S è un punto e n = 2 si ottiene la rotazione di 180◦ .
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
166
#10. SPAZI EUCLIDEI E ISOMETRIE
−→ −→ →
(dato che sia q che A appartengono a S). Ma allora, visto che Ap = Aq + −
qp,
−→
d ( A, p)2 = | Ap|2
−→ −→
= ⟨ Ap, Ap⟩
−→ → −→ −
→
= ⟨ Aq + −
qp, Aq + qp⟩
−→ −→
−→ →
→
→ −
→ −
→
= ⟨ Aq, Aq⟩ + ⟨ Aq, −
qp⟩ + ⟨−
qp,
Aq⟩ + ⟨−
qp,
qp⟩
−→
→2
= | Aq|2 + 0 + 0 + |−
qp|
→2
≥ |−
qp|
= d (q, p)2 ,
−→
cioè q realizza la minima distanza (è facile vedere che il minimo si ottiene per | Aq|2 = 0, cioè quando A =
q).
⨳
Ripetendo la dimostrazione del teorema (16.12), si può dimostrare il seguente teorema:
(19.8) Teorema. Se S ⊂ En è un sottospazio affine passante per A, allora esiste un sottospazio vettoriale
→
−
W ⊂ Rn (il complemento ortogonale di S in Rn ) per cui i punti di S sono tutti e soli i punti x di En tali
che x − A è ortogonale a W . Se S è un iperpiano (cioè un sottospazio di dimensione n − 1 in En ), allora la
dimensione di W è 1, per cui i punti di S sono tutti i punti tali che x − A è ortogonale ad un vettore fissato non
nullo n di W (che si può chiamare vettore normale a S):
S = {x ∈ En : ⟨x − A, n⟩ = 0}.
(19.9) Nota. Dato che ⟨x − A, n⟩ = 0 se e solo se ⟨x, n⟩ = ⟨A, n⟩, ritorniamo a vedere che l’equazione di un
iperpiano è
a1 x2 + a2 x2 + · · · + an xn = b,
dove b = ⟨A, n⟩. Per sottospazi generici (cioè non solo di dimensione n − 1, basta prendere una base del
complemento ortogonale W (e questi saranno vettori ortogonali a S) e, nello stesso modo, scrivere S come
luogo delle soluzioni di un sistema di equazioni.
(19.10) Esempio. Torniamo all’esempio (18.5): qual è il polinomio di grado 2 a coefficienti reali che è più vici∫1
no (nel senso della distanza tra funzioni indotta dalla norma indotta dal prodotto scalare ⟨p, q⟩ = 0 p(t )q(t ) dt)
alla funzione ex ? Qual è quello di grado n?
§ 19.1.
AREA E VOLUME NEGLI SPAZI AFFINI
Abbiamo definito la lunghezza e gli angoli a partire da un prodotto scalare definito sui vettori di En . Possiamo fare lo stesso con la definizione di volume? Qual è la definizione assiomatica di volume? Proponiamo
al lettore di discutere e riflettere sulla validità e naturalezza dei seguenti assiomi, per una funzione di area con
−−→
−−→
segno A di un triangolo ABC (o equivalentemente di un parallelogramma ABCD), in cui a = C A e b = CB:
(A1) A(ca, b) = cA( a, b) = A( a, cb); per ogni c ∈ R.
(A2) A( a, b + c) = A( a, b) + A( a, c); A( a + c, b) = A( a, b) + A( c, b);
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
167
§ 19. ANGOLI E PROIEZIONI ORTOGONALI
(A3) A( a, a) = 0;
(disegnare le figure corrispondenti agli assiomi)
Analogamente, una funzione di volume con segno V di un parallelepipedo con i tre spigoli concorrenti
−−→
−−→
−−→
a = DA, b = DB, c = DC probabilmente dovrebbe soddisfare gli assiomi
(V1) V (ca, b, c) = cV ( a, b, c) = V ( a, cb, c) = V ( a, b, cc); per ogni c ∈ R.
(V2) V ( a + d, b, c) = V ( a, b, c) + V ( d, b, c);
V ( a, b + d, c) = V ( a, b, c) + V ( b, d, c);
V ( a, b, c + d ) = V ( a, b, c) + V ( a, b, d );
(V3) (se due vettori coincidono, il volume è nullo)
V ( a, a, b) = 0 = V ( a, b, b) = V ( a, b, a);
In generale, per uno spazio affine X reale, una funzione di volume con segno (chiamiamola forma di
→
−
volume) sarà una funzione ω : X n → R
ω( v1 , v2 , . . . , vn ),
→
−
vi ∈ X , i = 1, . . . , n
che sia multilineare (cioè lineare in ogni sua variabile) e tale che ω( v1 , v2 , . . . , vn ) = 0 quando almeno due dei
vi coincidono. Osserviamo che da questa proprietà segue che
ω( v1 , . . . , vi , . . . , v j , . . . , vn ) + ω( v1 , . . . , v j , . . . , vi , . . . , vn ) = 0.
Infatti
0 = ω( v1 , . . . , vi + v j , . . . , vi + v j , . . . , vn )
= ω( v1 , . . . , vi , . . . , vi , . . . , vn ) + ω( v1 , . . . , vi , . . . , v j , . . . , vn )+
+ ω( v1 , . . . , v j , . . . , vi , . . . , vn ) + ω( v1 , . . . , v j , . . . , v j , . . . , vn )
= ω( v1 , . . . , vi , . . . , v j , . . . , vn ) + ω( v1 , . . . , v j , . . . , vi , . . . , vn ).
Quindi se si scambiano due variabili vi la funzione ω cambia di segno, cioè ω è alternante. Ora, quante sono le
funzioni con queste due proprietà (multilineari e alternanti)? Nello spazio euclideo standard ce n’é una, a meno
di costante, e cioè il determinante, che viene presa come unità di misura per il calcolo delle aree e dei volumi.
Lo studio dei determinanti di fatto non è altro che lo studio della misura (nel senso di area/volume) con segno
dei corrispondenti parallelogrammi/parallelepipedi. Provare a dimostrare che le isometrie di En conservano le
aree (vs. volumi) dei parallelogrammi (vs. parallelepipedi): occorre osservare che se v1 , . . . , vn sono vettori di
Rn e L è una applicazione lineare Rn → Rn (che è la parte lineare della mappa affine corrispondente), allora
per la formula di Binet
(19.11)
ω(Lv1 , . . . , Lvn ) = det (L)ω( v1 , . . . , vn ).
Ma per una isometria si ha L ∈ O(n), e quindi det (L) = ±1. Quindi, a meno di segno, ...
(19.12) Nota. La definizione di volume data sopra si riferisce ai parallelogrammi/parallelepipedi. Come è
possibile usarla per definire il volume per i triangoli/tetraedri (o in generale gli inviluppi convessi di n + 1 punti
in Rn ? Più precisamente, dato che il parallelogramma che ha per spigoli i vettori v1 , . . . , vn si può scrivere come
P = {O + t1 v1 + . . . + tn vn : ti ∈ [0, 1]} ⊂ En ,
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
168
#10. SPAZI EUCLIDEI E ISOMETRIE
come calcolare il volume del solido
T = {O + t1 v1 + . . . + tn vn : ti ∈ [0, 1],
n
∑
ti ≤ 1}?
i=1
Assumiamo che la funzione “volume di poliedri” in En soddisfi l’equazione (19.11), e se un poliedro è unione
di poliedri con interni disgiunti allora il suo volume è la somma dei volumi. Vediamo come da questo calcolare
il volume di un tetraedro n-dimensionale.
Per prima cosa osserviamo che basta calcolare il volume di un solo n-tetraedro (con i vertici indipendenti
dal punto di vista affine, cioè con i vi indipendenti come vettori): il volume di ogni altro n-tetraedro si ottiene
con un cambio di coordinate e un calcolo di determinante.
Cominciamo con l’ipercubo che ha per spigoli i vettori vi = ei (i vettori della base standard)
I n = {( x1 , x2 , . . . , xn ) : xi ∈ [0, 1]} ⊂ En .
Il suo volume è (nella forma di volume standard) uguale a 1. Gli n + 1 vertici dell’ n-tetraedro T 0 ⊂ I n definito
da
n
∑
T 0 = {( x1 , x2 , . . . , xn ) : xi ∈ [0, 1],
xi ≤ 1}
i=1
sono O = (0, 0, . . . , 0) e Ei = ei , con i = 1, . . . , n.
Ora consideriamo altri (n + 1) vertici di I n (comunque indipendenti dal punto di vista affine)
A0 = (0, 0, . . . , 0, 0)
A1 = (0, 0, . . . , 0, 1)
A2 = (0, 0, . . . , 1, 1)
..
..
.
.
An−1 = (0, 1, . . . , 1, 1)
An = (1, 1, . . . , 1, 1).
Il solido che ha gli Ai per vertici si scrive come
T = {A0 + t1 A1 + . . . + tn An : ti ∈ [0, 1],
n
∑
ti ≤ 1}
i=1
= {( x1 , . . . , xn ) : 0 ≤ x1 ≤ x2 ≤ . . . ≤ xn ≤ 1}.
Osserviamo ora che il gruppo simmetrico Σn di tutte le permutazioni di n indici (di ordine n!) agisce su En
permutando le coordinate, e per ogni g ∈ Σn , g ̸= 1, si ha che gT e T hanno interni disgiunti (perché?). Inoltre
∪
In =
gT ,
g∈Σn
da cui segue che
∑
|ω( gT )| = 1.
g∈Σn
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
169
§ 19. ANGOLI E PROIEZIONI ORTOGONALI
Figura 10.2: Icosaedro, di Piero Della Francesca (nel De Divina Proportione di Luca Pacioli)
Ma gT e T hanno lo stesso volume (±1), dato che g è una isometria, e quindi
n!|ω(T )| = ω(I n ) = 1 =⇒ |ω(T )| =
1
.
n!
Per la formula (19.11), si ha quindi che se LP è un n−parallelepipedo e LT l’n-tetradro corrispondente a T si
ha
| det (L)|
.
|ω(LT )| =
n!
Ora, osserviamo che la trasformazione lineare che manda O in A0 e Ei in An−i , per i = 1, . . . , n ha la matrice
L della forma triangolare inferiore
1 0 0 · · · 0
1 1 0 · · · 0
L = . . .
.. .. . . · · ·
1 1 1 ··· 1
1
e quindi det (L) = 1. Segue che ω(T 0 ) = , e anche in generale l’n-tetraedro con spigoli vi ha volume uguale
n!
a
ω( v1 , v2 , . . . , vn )
.
n!
(19.13) Esempio (Solidi platonici). Come vedremo nell’esercizio (10.25), è possibile classificare i sottogruppi
finiti di rotazioni in SO(3), che sono legati ai gruppi di simmetrie dei poliedri regolari, i solidi platonici.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
170
#10. SPAZI EUCLIDEI E ISOMETRIE
Figura 10.3: Leonardo Da Vinci, Dodecaedro (dal De Divina Proportione di Luca Pacioli)
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
171
Esercizi
ESERCIZI
*(10.1) Dimostrare che se {e1 , e2 , . . . , en } sono un insieme di vettori ortogonali di uno spazio vettoriale euclideo E, allora sono linearmente indipendenti. È vero anche il viceversa (cioè che se si considerano n vettori linearmente indipendenti in uno spazio vettoriale euclideo E allora sono ortogonali)? (Suggerimento: se
sono linearmente dipendenti allora si possono trovare n coefficienti non tutti nulli λ1 , λ2 , …, λn tali che
λ1 e1 + λ2 e2 + · · · + λn en = 0. Ma se λi ̸= 0 e si moltiplicano entrambi i membri per ei – con il prodotto scalare
– si ottiene …. Per il viceversa: in A2 (R) trovare due vettori linearmente indipendenti ma non ortogonali.
*(10.2) Dimostrare che le isometrie tra spazi (affini) euclidei si scrivono, scelti sistemi di riferimenti ortonormali, come
x 7→ Ax + b,
dove A è una matrice ortogonale e b un vettore. (Suggerimento: come nella dimostrazione (16.10))
(10.3) Dimostrare il lemma (18.6) a pagina 156.
(10.4) Dimostrare che le traslazioni di uno spazio euclideo sono isometrie.
*(10.5) Determinare una formula per la proiezione ortogonale di uno spazio euclideo En su un suo sottospazio
→
−
affine S di dimensione d < n, dato un punto di S e una base ortonormale per S . (Suggerimanto: si veda la
dimostrazione di (19.5), in cui si proietta su un sottospazio di dimensione 1 – una retta. Proiettare sulle rette
generate dagli elementi della base e sommare …)
(10.6) Siano A, B, C ∈ En tre punti di uno spazio euclideo. Dati altri tre punti A′ , B′ , C ′ ∈ En , dimostrare che
esiste una isometria f : En → En tale che f ( A) = A′ , f ( B) = B′ e f (C ) = C ′ se e solo se f conserva le
distanze tra i punti, cioè
|A′ − B′ | = |A − B|, |B′ − C ′ | = |B − C|, |A′ − C ′ | = |A − C|.
1
0
0
(10.7) Siano A = 0, B = 1, C = 0 tre punti di E3 . Esiste una isometria f : E3 → E3 tale che f ( A) = B,
0
0
1
f ( B) = C e f (C ) = A? Se sì, quale (scriverla in forma matriciale)?
(10.8) Siano r1 e r2 due rette di E3 . Sotto quali condizioni esiste una isometria che manda r1 in r2 ?
1
1
1
(10.9) Calcolare la distanza tra il punto 1 di E3 e il piano passante per 2 ortogonale al vettore 0.
1
3
0
(10.10) Determinare un vettore ortogonale al piano di E4 di equazione
x1 + 2x2 + 3x3 + 4x4 + 5 = 0.
*(10.11) Una similitudine f : En → En è una funzione che conserva i rapporti tra le distanze, cioè una funzione
per cui esiste una costante k > 0 tale che | f ( x ) − f (y)| = k|x − y| per ogni x, y ∈ En . Dimostrare che le
similitudini conservano gli angoli: se A, B, C ∈ En sono tre punti, allora l’angolo tra B − A e C − A è uguale
(a meno di orientazione) a quello tra f ( B) − f ( A) e f (C ) − f ( A).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
172
#10. SPAZI EUCLIDEI E ISOMETRIE
*(10.12) È vero che una similitudine, come definita nell’esercizio precedente (10.11), è sempre una mappa
affine? E una isometria?
(Suggerimento: si veda la dimostrazione di (18.12))
(10.13) Si consideri il piano affine euclideo E2 . Dimostrare che ogni isometria del piano si può scrivere componendo un numero finito di riflessioni lungo rette.
(Suggerimento: anche le traslazioni e le rotazioni si possono scrivere come composizione di due riflessioni
lungo due rette …parallele oppure no …)
(10.14) Dimostrare che se S ⊂ En è un sottospazio e pS è la proiezione ortogonale pS : En → S, allora la
funzione f : En → En definita da
f ( x ) = pS ( x ) + ( pS ( x ) − x )
è una isometria che fissa tutti e soli i punti di S (cioè tale che f ( x ) = x se e solo se x ∈ S).
[ ] [ ][ ]
0 1 0
(10.15) Scrivere una isometria del piano che manda i punti ,
ad una distanza dall’origine di almeno
0 0 1
4 unità.
[ ] [ ] [ ]
x
0
1
(10.16) Sia S la retta di equazione parametrica 1 =
+t
in E2 . Scrivere le equazioni della riflessione
x2
1
1
(ortogonale) di E2 attorno a S.
[ ] [ ] [ ]
x
p
v
*(10.17) Sia S la retta di equazione parametrica 1 = 1 + t 1 in E2 . Determinare i valori dei coefficienti
x2
p2
v2
ai, j e bi per cui la trasformazione affine
[ ]
[
][ ] [ ]
x1
a1,1 a1,2 x1
b
7→
+ 1
x2
a2,1 a2,2 x2
b2
è la riflessione (ortogonale) attorno a S.
(10.18) Determinare tutte le isometrie del piano euclideo che fissano almeno un punto. (Suggerimento: usare
(18.13) e trovare tutte le trasformazioni ortogonali di O(2).)
(10.19) Dimostrare che ogni rotazione di E2 è composizione di due riflessioni (lungo due rette) (si considerino
tre punti A, B, C di un sistema di riferimento affine euclideo per E2 , e le tre immagini f ( A) = A′ , f ( B) = B′ ,
f (C ) = C ′ : quali sono le riflessioni che mandano A in A′ ?).
(10.20) Dimostrare che ogni isometria del piano può essere scritta come la composizione di al più tre riflessioni
(lungo rette). (Suggerimento: se A, B e C sono tre punti linearmente indipendenti del piano, cioè non allineati,
allora le immagini A′ , B′ e C ′ sono anch’esse tre punti non allineati del piano. Con una riflessione (quale?)
si può mandare A in A′ . Poi si può mandare B in B′ riflettendo lungo una retta passante per A = A′ , e quindi
trovarsi con A = A′ , B = B′ …)
*(10.21) Dimostrare che le isometrie (non banali) del piano sono tutte e sole le seguenti: rotazioni, traslazioni,
riflessioni, glissoriflessioni.
(10.22) Siano A e B due punti distinti di E2 , e f , g le rotazioni attorno ad A e B (rispettivamente) di angolo
π/2. Determinare l’angolo e il centro delle rotazioni f g e gf . Che cos’è il gruppo di isometrie di E2 generato
da f e g? Determinare l’orbita di A, di B e del punto medio del segmento AB.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
173
Esercizi
(10.23) Dimostrare che se G è un gruppo finito di isometrie di E2 , allora esiste Q ∈ E2 fissato da G.
Nel prossimo esercizio si dimostra il Teorema Fondamentale dell’Algebra. Questa dimostrazione si basa
su proprietà elementari dei polinomi, principalmente della funzione norma, e sul fatto che una funzione su un
compatto di C ha certamente minimo.
**(10.24) Dimostrare le seguenti affermazioni.
(i) Sia p( x ) un polinomio a coefficienti in R di grado dispari. Allora p( x ) ha una radice reale (cioè esiste
x0 ∈ R tale che p( x0 ) = 0).
(ii) Se p( x ) è un polinomio a coefficienti in C
p( x ) = an zn + an−1 zn−1 + . . . + a1z + a0 ,
e p̄( x ) indica il polinomio i cui coefficienti sono i complessi coniugati āi , p̄( x ) = ān zn + ān−1 zn−1 + . . . +
ā1 z + ā0 , allora p( x ) ha coefficienti reali se e soltanto se p = p̄, e per ogni z ∈ C si ha p(z ) = p̄(z̄ ).
(iii) Per ogni p, q polinomi a coefficienti in C, se r = pq, allora r¯ = p̄q̄.
(iv) Per ogni polinomio p(z ) a coefficienti in C il polinomio r (z ) = p(z ) p̄(z ) ha coefficienti in R.
(v) Se z0 è una radice di r (z ) = p(z ) p̄(z ), allora z0 o z̄0 è una radice per p(z ).
(vi) Sia p(z ) un polinomio a coefficienti reali. Allora per ogni m > 0 esiste r > 0 tale che |z| > r =⇒
|p(z )| > m.
(vii) Per ogni r > 0, esiste z0 tale che |z0 | ≤ r e |z| ≤ r =⇒ |p(z )| ≤ |p(z0 )|.
(viii) La funzione |p(z )|, C → R, ammette un minimo globale z0 , tale che ∀z ∈ C, |p(z )| ≥ |p(z0 )|.
(ix) Se z0 ∈ C è il punto di minimo globale, e se z0 ̸= 0, allora la funzione definita da f (z ) =
polinomio di grado n (il grado di p(z )) tale che f (0) = 1 e
p(z0 + z )
è un
p(z0 )
f (z ) = 1 + zk r (z )
con r (z ) polinomio di grado n − k tale che r (0) ̸= 0, e k ≥ 1. Inoltre il minimo globale per | f (z )| è in
0 ∈ C.
(x) Esiste z1 ∈ C tale che z1k r (0) = −1.
(xi) La funzione g(z ) = f (z1 z ) è un polinomio in z di grado n che si scrive come
g(z ) = 1 − zk + zk+1rˆ(z )
dove rˆ(z ) è un polinomio in z. Il minimo globale di |g(z )| è in z = 0.
(xii) Per ogni z ∈ C, si ha
|g(z )| ≤ |1 − zk | + |zk+1 ||rˆ(z )|.
(xiii) Esiste t ∈ R tale che 0 < t < 1 e t|g(t )| < 1, e quindi
|g(t )| ≤ 1 − t k + t k+1 |g(t )| = 1 − t k (1 − t|g(t )|) < 1.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
174
#10. SPAZI EUCLIDEI E ISOMETRIE
(xiv) Se p(z ) è un polinomio a coefficienti reali di grado n ≥ 1, allora esiste z0 ∈ C tale che f (z0 ) = 0 (si
consideri che la funzione |p(z )| ha minimo in z0 , e questo punto non può essere tale che |p(z0 )| = 0).
(xv) Se p(z ) è un poliniomio a coefficienti complessi di grado n ≥ 1, allora esiste z0 ∈ C tale che p(z0 ) = 0.
Nel prossimo esercizio dimostriamo un pezzo del teorema di classificazione dei sottogruppi finiti di SO(3):
Cn , Dk , T , O, I.
**(10.25) Sia G ⊂ SO(3) un gruppo finito e S = S 2 ⊂ E3 la sfera unitaria. Dimostrare le seguenti proposizioni.
(i) Per ogni x ∈ S lo stabilizzatore G x ⊂ G è un gruppo ciclico finito.
(ii) Per ogni g ∈ G ∖ {1}, lo spazio fissato da g in S, cioè S g = {x ∈ S : gx = x}, è un insieme di due punti
antipodali {x, −x}.
(iii) L’insieme X dei poli, cioè degli x ∈ S con stabilizzatore non banale X = {x ∈ S : |G x | > 1} è invariante
rispetto all’azione di G su S: ∀g ∈ G, gX = X (per ogni insieme finito Y si denota con |Y | il numero di
elementi di Y ).
(iv) Sia p : X → X/G la mappa di proiezione sullo spazio quoziente. Se x̄ è un’orbita in X/G, allora x̄ ha
|G|/|G x | elementi. Se x e y stanno nella medesima orbita, allora |G x | = |G y |. Sia nx̄ l’intero definito da
nx̄ = |G x | per un elemento x dell’orbita x̄. Il G-insieme X è unione disgiunta delle sue orbite, e quindi
∑ |G|
|X| =
.
n
x̄∈X/G x̄
(v) Sia X̄ l’insieme X dei poli quozientato rispetto alla relazione di equivalenza data da x ∼ −x. Allora
2|X̄| = |X|.
(vi) Sia f : G ∖ {1} → X̄ l’applicazione che associa ad ogni g ∈ G, g ̸= 1, la coppia di poli {x, −x} ∈ X̄
fissata da g in S. Mostrare che f è suriettiva, e dedurre che X è finito.
(vii) Se [ x ] ∈ X̄ è una classe di equivalenza di poli, allora G x = G y per ogni y ∈ [ x ], e l’insieme f −1 ([ x ]) ha
|G x | − 1 elementi.
(viii) Valgono le uguaglianze
2(|G| − 1) = 2
∑
(|G x | − 1) =
[ x ]∈X̄
(ix) Vale l’uguaglianza
2(|G| − 1) =
∑
(|G x | − 1)
x∈X
∑ |G|
(nx̄ − 1).
n
x̄∈X/G x̄
(x) Se G non è il gruppo banale, valgono le disuguaglianze
∑
1
1≤
(1 − ) < 2.
nx̄
x̄∈X/G
(xi) Valgono le disuguaglianze
∑
1
1
|X/G| ≤
(1 − ) < |X/G|,
2
nx̄
x̄∈X/G
da cui
2 ≤ |X/G| ≤ 3.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
175
Esercizi
(xii) Ci sono 2 o 3 orbite di poli in X/G. Se X/G = { x̄1 , x̄2 }, allora posto n1 = nx̄1 e n2 = nx̄2 si ha
2
1
1
=
+ ,
|G| n1 n2
e questo implica n1 = n2 = |G| (osserviamo che se n = |G|, allora n/ni è intero per i = 1, 2 e che
n/n1 + n/n2 = ). Quindi G è il gruppo ciclico generato da una rotazione, indicato con il simbolo Cn .
(xiii) Se X/G = { x̄1 , x̄2 , x̄3 }, allora posto n = |G|, n1 = nx̄1 , n2 = nx̄2 e n3 = nx̄3 si ha
1+
2
1
1
1
=
+
+ .
n n1 n2 n3
Allora se supponiamo n1 ≥ n2 ≥ n3 > 1, deve essere n3 = 2, e quindi
1 2
1
1
+ =
+ .
2 n n1 n2
(xiv) Dalla disequazione precedente e da n1 ≥ n2 ≥ 2, si deduce che n2 ∈ {2, 3}.
n
(xv) Se n2 = 2, allora 2n1 = n, quindi (n1 , n2 , n3 ) = ( , 2, 2). Il gruppo G è (deve essere! perché?) il gruppo
2
generato da due rotazioni di angolo π attorno a due assi che si intersecano nell’origine con angolo 2π/n
(gruppo diedrale di ordine n = 2n1 , indicato con il simbolo Dn1 ).
(xvi) Se n2 = 3, allora
1
1 2
+ = .
6 n n1
e quindi 3 ≤ n1 ≤ 5, da cui
n1 = 3 =⇒ n = 12;
n1 = 4 =⇒ n = 24;
n1 = 5 =⇒ n = 60.
(xvii) Esistono gruppi con n3 = 2, n2 = 3 e n1 ∈ {3, 4, 5}: sono i gruppi delle rotazioni che sono simmetrie del
tetraedro (T ), esaedro/ottaedro (cubo) (O), icosaedro/dodecaedro (I). Descriverne gli assi di rotazione.
Ci sono solo questi gruppi in SO(3) con questi insiemi di poli?
(10.26) Sia G ⊂ GL(n, R) un sottogruppo finito di ordine |G| > 1, e x · y denoti il prodotto scalare standard
di Rn . Allora:
(i) Il prodotto ⟨x, y⟩, definito per x, y ∈ Rn da
⟨x, y⟩ =
1 ∑
( Ax) · ( Ay)
|G| A∈G
è un prodotto scalare.
(ii) Per ogni A ∈ G, per ogni x, y ∈ Rn si ha
⟨Ax, Ay⟩ = ⟨x, y⟩.
(iii) Esiste una base b1 , . . . , bn di Rn ortonormale rispetto al prodotto ⟨−, −⟩.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
176
#10. SPAZI EUCLIDEI E ISOMETRIE
(iv) Se Q è la matrice del cambio di base, tale che Qbi = ei per ogni i = 1, . . . , n (ei vettori della base
standard), allora
⟨x, y⟩ = (Qx) · (Qy) = xt Qt Qy.
(v) Per ogni A ∈ G la matrice coniugata QAQ−1 è ortogonale.
(vi) L’applicazione G → O(n) definita da A 7→ QAQ−1 è un omomorfismo di gruppi, ed è iniettiva.
(vii) Se G è un sottogruppo finito di GL(n, R), allora G è isomorfo ad un sottogruppo finito di O(n).
Abbiamo visto nella proposizione (18.12) che una isometria tra spazi euclidei è sempre un isomorfismo
affine. Ma cosa succede se si considerano spazi la cui metrica viene da una norma arbitraria (non quella
standard di En )? Mostriamo nel prossimi esercizi come le cose cambiano, ma non di molto.
*(10.27) Sia R con la metrica euclidea, e V = R2 con la metrica indotta dalla norma del massimo
∀x = ( x1 , x2 ) ∈ R2 ,
∥x∥ = max{|x1 |, |x2 |},
per cui la distanza tra x e y in V è data da ∥x − y∥. Dimostrare i seguenti fatti.
(i) La funzione f : R → V definita da f (t ) = (t, sin t ) conserva la distanza, cioè per ogni t1 , t2 ∈ R si ha
∥ f (t1 ) − f (t2 )∥ = |t1 − t2 |.
(ii) La funzione f definita sopra non è una mappa affine.
**(10.28) (Teorema di Mazur-Ulam) Siano X e Y spazi vettoriali reali con norme ∥·∥X e ∥·∥Y . Si considerino come spazi affini, con la struttura di spazio affine standard. Sia f : X → Y una isometria (biunivoca). Dimostrare
le seguenti proposizioni.
(i) La funzione f è continua.
(ii) Se f conserva i punti medi dei segmenti, allora è una mappa affine; cioè, se per ogni A, B ∈ X si ha
f(
f ( A) + f ( B)
A+ B
)=
,
2
2
allora f è affine. (Suggerimento: usare la proposizione (16.16), la densità dei razionali diadici dell’esercizio (2.2) a pagina 22 e la continuità)
(iii) Se Q ∈ X è un punto qualsiasi, allora la riflessione centrale attorno a Q (definita da φ( x ) = Q + (Q − x ))
è una isometria tale che φ−1 = φ e φ( x ) = x ⇐⇒ x = Q.
(iv) Mostrare che se φ è una riflessione centrale attorno a Q ∈ X, allora per ogni x ∈ X si ha
∥φ( x ) − Q∥X = ∥x − Q∥X ,
∥φ( x ) − x∥X = 2∥x − Q∥X .
A+ B
il punto medio. Se g: X → X è una isometria tale
2
che g( A) = A e g( B) = B, allora ∥g(Q) − A∥X = ∥Q − A∥X e
(v) Siano A, B ∈ X due punti distinti A ̸= B, e Q =
∥g(Q) − Q∥X ≤ 2∥A − Q∥X .
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
177
Esercizi
(vi) Sia W l’insieme di tutte le isometrie (biunivoche) g di X (in X) tali che g( A) = A e g( B) = B; esiste
l’estremo superiore
λ = sup ∥g(Q) − Q∥X .
g∈W
(vii) Sia φ : X → X la riflessione centrale attorno a Q (punto medio di AB). Se g ∈ W, allora φg−1 φg ∈ W.
(viii) Per ogni g ∈ W,
∥φg−1 φgQ − Q∥X = ∥g−1 φgQ − φQ∥X
= ∥φgQ − gQ∥X .
(ix) Per ogni g ∈ W
e quindi per ogni g
∥φ( gQ) − gQ∥X = 2∥gQ − Q∥X ,
2∥gQ − Q∥X = ∥φg−1 φgQ − Q∥X ≤ λ.
(x) λ = 0, e quindi g ∈ W =⇒ g(Q) = Q.
A+ B
(xi) Siano A′ = f ( A) e B′ = f ( B) le immagini di A, B in Y mediante l’isometria f , e Q =
,
2
′
′
A +B
i punti medi. Sia φ′ : Y → Y la riflessione centrale attorno a Q′ . Allora la mappa
Q′ =
2
h = φ f −1 φ′ f : X → X è un elemento di W.
(xii) Dedurre che h(Q) = Q e che f (Q) = Q′ .
(xiii) (Teorema di Mazur-Ulam)* : ogni isometria biunivoca f : X → Y tra spazi normati è una mappa affine.
* Lo
schema di questa dimostrazione è di Jussi Väisälä, che a sua volta è basata su idee di A. Vogt.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
178
#10. SPAZI EUCLIDEI E ISOMETRIE
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
Settimana N° 11
SPAZI PROIETTIVI E PROIETTIVITÀ
§ 20.
SPAZI PROIETTIVI
(Cfr.)*
(20.1) Definizione. Sia V uno spazio vettoriale su campo K. Lo spazio proiettivo generato da V (il proiettivizzato di V , denotato con P(V )), è il quoziente di V ∖ {0} con la relazione di equivalenza v ∼ w ⇐⇒ ∃λ ∈
K ∗ = K ∖ {0} : w = λv. La dimensione di P(V ) è uguale a dim (V ) − 1.
(20.2) Esempio. L’esempio standard si ottiene considerando lo spazio vettoriale K n+1 di dimensione n + 1.
Il proiettivo associato si indica con Pn (K ) (dunque Pn (R) e Pn (C) indicano lo spazio proiettivo reale e
complesso di dimensione n). Se K ha una topologia (metrica), così come An (K ) ha la topologia generata da
quella di K, anche Pn (K ) ha una topologia naturale: la topologia quoziente.
(20.3) Nota. Osserviamo che la definizione (20.1) può essere data anche in termini di gruppi di trasformazioni:
l’insieme degli scalari non nulli K ∗ = K ∖ {0} è un gruppo rispetto all’operazione di moltiplicazione (gruppo
moltiplicativo), che agisce su V ∖ {0} (moltiplicazione per uno scalare). Allora semplicemente il proiettivizzato
P(V ) è uguale allo spazio delle K ∗ -orbite
P(V ) = V ∖ {0}/K ∗ .
Se V ha dimensione 1, allora V ∼
= K e V ∖ {0} ∼
= K ∖ {0}; non è difficile vedere che quindi P(V ) è costituito
da un elemento solo.
(20.4) Nota. Una definizione equivalente di spazio proiettivo è la seguente: P(V ) è l’insieme di tutti i sottospazi di dimensione 1 di V . Come esercizio, dimostrare che questa definizione coincide con la definizione
(20.1) (cioè che i due insiemi ottenuti sono in corrispondenza biunivoca).
(20.5) Esempio. La retta proiettiva P1 (R) = P(R2 ): è omeomorfa a una circonferenza quozientata rispetto
alla relazione di equivalenza x ∼ −x, oppure ad un segmento con gli estremi identificati (cfr. esercizio (11.2)
a pagina 193). Quanti punti ha la retta proiettiva P1 (Z p ), con p ∈ N primo? E a cosa è omeomorfa la retta
proiettiva P1 (C) = P(C2 ). Osserviamo che (z0 , z1 ) ∼ (z0′ , z1′ ) se e soltanto se esiste λ ∈ C∗ tale che zi′ = λzi
* Cfr:
Sernesi, Vol I, cap 3 [1].
179
180
#11. SPAZI PROIETTIVI E PROIETTIVITÀ
Figura 11.1: Piero Della Francesca (1415 – 1492), Pala di Brera / Pala Montefeltro
per i = 0, 1. Se z0 = 0, allora z1 ̸= 0 e quindi (0, z1 ) ∼ (0, 1) dato che z1 = λ · 1 con λ = z1 . Se z0 ̸= 0, allora
nello stesso modo
z1
(z0 , z1 ) ∼ (1, ).
z0
Quindi in P1 (C) ci sono i punti del tipo [(1, w) con w ∈ C e il punto [(0, 1)]. Con la proiezione stereografica
possiamo definire una funzione S 2 ∖ {(0, 0, 1)} → R2 , come
( x, y, z ) ∈ S 2 ∖ {(0, 0, 1)} ⊂ R3 7→ (
x
y
,
) ∈ R2 .
1−z 1−z
Questa si estende ad una funzione
( x, y, z ) ∈ S 2 7→ [(1,
x + iy
)] ∈ P1 (C)
1−z
?
Per rispondere a questa domanda, osserviamo che per ogni x, y, z ∈ R con x 2 + y2 + z2 = 1 (( x, y, z ) ∈ S 2 ⊂ R3 )
e z ̸= 1 (da cui segue che x 2 + y2 = 1 − z2 ̸= 0) si ha
(1,
x + iy
) ∼ (1 − z, x + iy)
1−z
∼ (1 − z2 , (1 + z )( x + iy))
∼ ( x 2 + y2 , (1 + z )( x + iy))
∼ (( x − iy)( x + iy), (1 + z )( x + iy))
∼ ( x − iy, 1 + z ).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
181
§ 20. SPAZI PROIETTIVI
Figura 11.2: Raffaello Sanzio (1483 – 1520), La Scuola di Atene
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
182
#11. SPAZI PROIETTIVI E PROIETTIVITÀ
Da questo segue che la risposta è affermativa (lo si svolga per esercizio: (11.2) a pagina 193). Nello stesso
esercizio dimostrare che la funzione appena definita è un omeomorfismo.
(20.6) Definizione. Consideriamo lo spazio proiettivo Pn (K ) di dimensione n su campo K. Un punto di x ∈
K n+1 si scrive come (n + 1)-upla con coordinate xi ∈ K
( x 0 , x 1 , . . . , x n ).
Se x ̸= 0 (cioè non tutte le coordinate xi sono nulle), la classe di equivalenza di x si può indicare con [ x ] ∈
Pn (K ). Le coordinate xi di x si chiamano coordinate omogenee di [ x ], e si scrive
[ x ] = [ x0 : x1 : · · · : xn ]
(20.7) Siano p = [ p0 : p1 : · · · : pn ] e q = [q0 : q1 : · · · : qn ] due punti di Pn (K ). Allora p = q se e solo se
esiste λ ∈ K ∖ {0} tale che
∀i = 0, . . . n, qi = λpi .
Dim. È una conseguenza immediata della definizione (20.1).
⨳
(20.8) La funzione
j 0 : A n ( K ) → Pn ( K ) ,
definita da
( x1 , x2 , . . . , xn ) 7→ [1 : x1 : x2 : · · · : xn ]
è iniettiva. La sua immagine è
j0 (An (K )) = {[ p0 : p1 : · · · : pn ] ∈ Pn (K ) : p0 ̸= 0},
e si può definire l’applicazione inversa
{[ p0 : p1 : · · · : pn ] ∈ Pn (K ) : p0 ̸= 0} → An (K )
[ p0 : p1 : · · · : pn ] 7→ (
p1 p2
pn
, , . . . , ).
p0 p0
p0
Dim. È ovvio che j0 è ben definita. Per mostrare che è iniettiva, basta mostrare che l’applicazione definita
sopra è la sua inversa (definita su {p0 ̸= 0}). Infatti, la composizione
( x1 , x2 , . . . , xn ) 7→ [1 : x1 : x2 : · · · : xn ] 7→ (
x1 x2
xn
, ,..., )
1 1
1
è chiaramente l’identità di An (K ), mentre la composizione
[ p0 : p1 : · · · : pn ] 7→ (
p1 p2
pn
, , . . . , ) 7→
p0 p0
p0
7→ [1 :
p1 p2
pn
:
: ··· :
]
p0 p0
p0
è l’identità dato che esiste λ = p0 ̸= 0, λ ∈ K ∖ {0} tale che
λ(1,
p1 p2
pn
, , . . . , ) = ( p0 , p1 , . . . , pn ).
p0 p0
p0
⨳
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
183
§ 20. SPAZI PROIETTIVI
(20.9) Nota. È chiaro che avremmo potuto definire una funzione come la j0 considerando non la prima coordinata (p0 ), ma una qualsiasi delle n + 1 coordinate di K n+1 . In questo modo possiamo “includere” lo spazio affine
An (K ) nello spazio proiettivo Pn (K ) in almeno n + 1 modi distinti. Più in generale, cambiando le coordinate
in K n+1 e in An (K ) si possono trovare infiniti modi di definire tale inclusione.
(20.10) Definizione. Per ogni i = 0, . . . , n il sottoinsieme di Pn (K ) definito da
{[ p0 : p1 : · · · : pn ] ∈ Pn (K ) : pi ̸= 0}
si chiama la i-esima carta affine, e si indica con il simbolo Ani (K ). È il complementare del sottospazio definito
dall’equazione pi = 0, che si dice iperpiano dei punti impropri, o punti all’infinito. I punti della i-esima carta
affine hanno, oltre che le coordinate omogenee, anche coordinate affini relative a i, mediante l’applicazione
inversa ji−1 .
ji−1 : [ p0 : p1 : . . . : pn ] =
pi−1
pi+1
pn
p0
:1:
: ··· :
]
[ : ··· :
pi
pi
pi
pi
p0
pi−1 pi+1
pn
7→ ( , . . . ,
,
,... )
pi
pi
pi
pi
(20.11) Nota. Abbiamo quindi che Pn (K ) è l’unione disgiunta dei due sottospazi
Pn (K ) = {[ x ] ∈ Pn (K ) : x0 ̸= 0} ∪ {[ x ] ∈ Pn (K ) : x0 = 0}
= An0 (K ) ∪ Pn−1
0 ( K ),
n
dove An0 (K ) è la parte affine e Pn−1
0 (K ) è il sottospazio dei punti all’infinito, o punti impropri di P ( K ). La
scelta della coordinata x0 , xi in realtà può essere vista come la scelta di un iperpiano (di codimensione 1) di
punti impropri per Pn (K ).
(20.12) Definizione. Sia V ⊂ K n+1 un sottospazio vettoriale dello spazio vettoriale K n+1 . Allora è ben definita
l’inclusione
P(V ) ⊂ Pn (K ).
Il sottospazio P(V ) ⊂ Pn (K ) si dice sottospazio proiettivo (o sottospazio lineare) di Pn (K ) di dimensione
dim (P(V )) = dim (V ) − 1.
(20.13) Nota. I sottospazi di dimensione 0 si dicono punti, quelli di dimensione 1 rette, quelli di dimensione
2 piani, quelli di dimensione n − 1 (codimensione 1) iperpiani.
(20.14) Proposizione. Se L è un sottospazio proiettivo di Pn (K ) di dimensione d, allora per ogni carta affine
Ani (K ) ⊂ Pn (K ) l’intersezione Ani (K ) ∩ L, se non vuota, è un sottospazio affine di Ani (K ) ∼
= An (K ) di dimensione d. Viceversa, per ogni sottospazio affine S ⊂ Ani (K ) di dimensione d esiste un sottospazio proiettivo
L ⊂ Pn (K ) di dimensione d tale che S = Ani (K ) ∩ L.
Dim. Sia V ⊂ K n il sottospazio vettoriale per cui P(V ) = L. Senza perdere in generalità, a meno di cambi
di variabili, possiamo supporre che i = 0. Come abbiamo già notato nella dimostrazione di (16.12), è sempre
possibile scrivere V come luogo degli zeri di una applicazione lineare (suriettiva) K n+1 → K n−d , cioè come
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
184
#11. SPAZI PROIETTIVI E PROIETTIVITÀ
sistema di n − d equazioni (omogenee e indipendenti) nelle n + 1 incognite (le coordinate di K n+1 , cioè le coordinate omogenee dello spazio proiettivo associato); quindi esiste una matrice (n − d ) × (n + 1) (una funzione
lineare M : K n+1 → K n−d ) di rango n − d tale che
V = {v ∈ K n+1 : M (v) = 0}.
L’intersezione An0 (K ) ∩ L è quindi l’insieme di tutti i punti [1 : x1 : x2 : · · · : xn ] di An0 (K ) tali che
1
x1
M ( x2 ) = 0.
. . .
xn
Ma M è lineare, per cui si può scrivere (scelte le basi) come moltiplicazione di una matrice per un vettore, e quindi esistono coefficienti bi , ai, j tali che i punti di An0 (K ) ∩ L sono tutti e soli i punti di coordinate
( x1 , x2 , . . . , xn ) tali che
1
a1,1
a1,2 . . .
a1,n 0
b1
x
b
a2,1
a2,2 . . .
a2,n 1 0
2
..
..
..
.. x2 = ..
..
.
.
.
.
. .. .
.
bn−d an−d,1 an−d,2 . . . an−d,n
0
xn
il che è equivalente a scrivere che
a1,2 . . .
a1,1
a
a2,2 . . .
2,1
+ ..
..
..
.
.
.
bn−d
an−d,1 an−d,2 . . .
b1
b2
..
.
x1 0
x 0
2
.. = .. .
. .
an−d,n xn
0
a1,n
a2,n
..
.
L’insieme di soluzioni, se non vuoto, è uno spazio affine. Per verificare che si tratta di uno spazio affine di
dimensione d, basta osservare che il rango della matrice (ai, j ) è proprio n − d. Infatti, il rango della matrice
(ai, j ) può essere uguale soltanto a n − d e n − d − 1, dal momento che la matrice (ai, j ) si ottiene cancellando
la prima colonna della matrice completa (bi , ai, j ) (che ha rango n − d per ipotesi). Ma se il rango è uguale
a n − d − 1, allora il vettore (bi ) non è combinazione lineare dei vettori colonna di (ai, j ), e quindi il sistema
non ha soluzioni. Quindi deve necessariamente essere uguale a n − d, e l’insieme di soluzioni ha dimensione
d. Abbiamo dimostrato la prima parte della proposizione.
Ora, supponiamo di avere un sottospazio affine S di dimensione d, e quindi l’insieme di soluzioni di Ax +
b = 0. Proseguendo come sopra, ma al contrario, possiamo osservare che la matrice M = (bi , ai, j ) ha rango
n − d e che individua il sottospazio vettoriale V di dimensione d + 1 tale che P(V ) = L cercato.
⨳
(20.15) Nota. Come segue da (20.14), lo spazio proiettivo Pn (K ) può essere pensato come l’unione di uno
spazio affine An0 (K ) con coordinate [1 : x1 : x2 : · · · : xn ] più un iperpiano di punti all’infinito (i punti
impropri) di coordinate [0 : x1 : x2 : · · · : xn ] (cfr. la nota (20.11) a pagina 183). I sottospazi proiettivi di
Pn (K ) sono quindi i sottospazi affini in An0 (K ) cui sono stati aggiunti i loro punti all’infinito.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
185
§ 20. SPAZI PROIETTIVI
(20.16) Definizione. Se S ⊂ An (K ) è un sottospazio affine e An (K ) ∼
= Ani (K ) ⊂ Pn (K ) è una carta affine,
il sottospazio proiettivo L ⊂ Pn (K ) tale che Ani (K ) ∩ L = S della proposizione appena dimostrata si dice il
completamento proiettivo (o anche chiusura proiettiva) di S.
(20.17) Esempio. Determiniamo la chiusura proiettiva e i punti all’infinito della retta S di A2 (R) di equazione
x1 + x2 = 1. Per prima cosa, aggiungendo una coordinata, scriviamo A2 (R) come carta affine di P2 (R), con
coordinate [1 : x1 : x2 ]. Per trovare la chiusura proiettiva di S in P2 (R) dobbiamo trovare una (sola) equazione
lineare omogenea nelle coordinate [z0 : z1 : z2 ], che definisca un sottospazio vettoriale di R3 di dimensione 2
(che corrisponde alla retta proiettiva L cercata). Cioè
b1 z0 + a1 z1 + a2 z2 = 0
in modo tale che
b1 · 1 + a1 x1 + a2 x2 = 0
sia l’equazione di S nella carta affine. Basta riscrivere l’equazione come
−1 + x1 + x2 = 0,
e quindi definire b1 = −1, a1 = 1, a2 = 1. La retta proiettiva L ha quindi equazione
−z0 + z1 + z2 = 0
nelle coordinate omogenee [z0 : z1 : z2 ] di P2 (R). I punti all’infinito sono le intersezioni di L con la retta
impropria di equazione z0 = 0, e quindi sono le soluzioni (omogenee) del sistema
−z0 + z1 + z2 = 0
z0 = 0
che ha come soluzione tutti l’unico punto di coordinate omogenee [0 : 1 : −1] (che possiamo scrivere come
[0 : t : −t ] per ogni con t ̸= 0).
(20.18) Definizione. Così come nella definizione (15.6), presi d + 1 punti [ p0 ], [ p1 ], …, [ pd ] di Pn (K ) si può
definire il sottospazio proiettivo generato dai punti stessi come l’insieme di tutte le combinazioni lineari
[λ0 p0 + λ1 p1 + · · · + λd pd ]
con i coefficienti λi ∈ K non tutti nulli. I punti [ pi ] ∈ Pn (K ) si dicono linearmente dipendenti se i corrispondenti vettori pi ∈ K n+1 sono linearmente dipendenti, e linearmente indipendenti se lo sono i vettori.
(20.19) Proposizione. Per due punti distinti di Pn (K) passa una e una sola retta. Per tre punti non allineati
di Pn (K) passa uno e un solo piano.
§ 20.1.
ISOMORFISMI PROIETTIVI E PROIETTIVITÀ
(20.20) Definizione. Siano P(V ) e P(W ) due spazi proiettivi. Una funzione f : P(V ) → P(W ) si dice
proiettiva se esiste un omomorfismo iniettivo di spazi vettoriali F : V → W tale che per ogni v ∈ V si ha
f ([v]) = [ F (v)].
V ∖ {0}
P(V )
F
/ W ∖ {0}
f
/ P(W )
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
186
#11. SPAZI PROIETTIVI E PROIETTIVITÀ
Si dice che F induce la funzione f . Se f ammette una inversa proiettiva g (cioè una funzione g: P(W ) →
P(V ) indotta da un omomorfismo iniettivo G : W → V tale che gf = 1P(V ) e f g = 1P(W ) ), allora è detto
un isomorfismo proiettivo. In questo caso si dice che P(V ) e P(W ) sono isomorfi. Se V = W (e quindi
P(V ) = P(W ), allora un isomorfismo proiettivo si dice proiettività.
Osserviamo che diverse F possono indurre la stessa funzione proiettiva f : P(V ) → P(W ): infatti se
F : V → W induce f , allora anche λF, per λ ̸= 0, λ ∈ K, induce la stessa f .
(20.21) Due omomorfismi F, G : V → W iniettivi inducono la medesima f : P(V ) → P(W ) se e soltanto se
esiste λ ∈ K ∗ tale che G = λF. La funzione f è un isomorfismo se e soltanto se F : V → W è un isomorfismo
di spazi vettoriali, per una qualsiasi F che induce f .
Dim. Abbiamo già visto che se G = λF, allora inducono la stessa f . Viceversa, se F e G inducono la medesima
f , allora per ogni v ∈ V deve esistere λv ∈ K ∗ tale che
G (v) = λv F (v).
Se v e w sono due vettori di V , allora
G (v + w) = λ(v+w) F (v + w),
e dunque
G (v) + G (w) = λ(v+w) ( F (v) + F (w)).
Ma G (v) = λv F (v), G (w) = λw F (w), e quindi deve essere
λv F (v) + λw F (w) = λ(v+w) F (v) + λ(v+w) F (w).
Se v e w sono linearmente indipendenti, allora anche F (v) e F (w) lo sono, e quindi
λv = λ(v+w) = λw .
Se v e w sono linearmente dipendenti, allora è facile vedere che λv = λw . Quindi esiste λ (che non dipende da
v) tale che G (v) = λF (v) per ogni v ∈ V .
Ora, se f è un isomorfismo proiettivo (indotta da F), allora esiste la sua inversa g (indotta da G). La
composizione GF induce l’identità di P(V ), la composizione FG induce l’identità di P(W ), e quindi devono
esistere λ e λ′ tali che
GF = λ1V , FG = λ′ 1W ,
e F deve essere un isomorfismo di spazi vettoriali.
⨳
(20.22) Nota. Due spazi vettoriali della stessa dimensione (su campo K) sono isomorfi, per cui due spazi
proiettivi sullo stesso campo e con la stessa dimensione sono isomorfi. Quindi senza perdere in generalità si
può sempre pensare che uno spazio proiettivo su campo K sia Pn (K ). Se indichiamo con GL(V ) il gruppo di
tutti gli isomorfismi dello spazio vettoriale V in sé e PGL(V ) il gruppo di tutte le proiettività di P(V ) in sé,
si ha un omomorfismo (di gruppi) GL(V ) → PGL(V ) suriettivo (per definizione) ma non necessariamente
iniettivo. Come abbiamo visto prima, il suo nucleo è proprio dato dall’insieme di tutti i multipli di 1V (identità
di V ) del tipo λ1V , con λ ∈ K ∗ . Possiamo ripetere passo per passo l’argomento usato: se A: V → V induce
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
187
§ 20. SPAZI PROIETTIVI
l’identità P(V ) → P(V ), allora per ogni v ∈ V si ha Av = λv v per un certo λv ∈ K (che potrebbe dipendere da
v), λv ̸= 0: cioè tutti i vettori di V sono autovettori per A. Ora, se v′ = v + w, si ha
Av′ = Av + Aw
=⇒ λv′ v′ = λv v + λw w
=⇒ λv′ ( v + w) = λv v + λw w
=⇒ (λv′ − λv ) v + (λv − λw ) w = 0,
e quindi quando v e w sono linearmente indipendenti deve essere λv = λv′ = λw . Dato che autovettori linearmente dipendenti hanno sempre lo stesso autovalore, deduciamo che λv non dipende da v, e quindi che Av = λv,
cioè A = λ1V .
Le matrici del tipo λ1V costituiscono il centro di GL(V ). Il centro di GL(n, K ) ∼
= GL(V ) è il sottogruppo
di tutte le matrici A tali che AB = BA per ogni B ∈ GL(V ). Sia ora Ei j una matrice con coefficienti ovunque
0 tranne 1 al posto i j, con i ̸= j. La matrice I + Ei j ha determinante 1, e quindi è invertibile. In particolare, se
A è nel centro di GL(V ), deve essere A(I + Ei j ) = (I + Ei j ) A per ogni scelta di i j, e quindi AEi j = Ei j A. Ma
AEi j è una matrice che ha zeri ovunque tranne nella colonna j-esima (dove compare la i-esima colonna di A).
Invece, Ei j A ha zeri ovunque tranne nella riga i-esima (dove compare la j-esima riga di A). Quindi la matrice
AEi j = Ei j A ha tutti zeri tranne nel posto i j; nella j-esima colonna c’è la i-esima colonna di A, che quindi
deve avere tutti zero tranne il coefficiente aii , che compare in AEi j al posto i j; nella i-esima riga di AEi j c’è
la j-esima riga di A, che quindi deve avere tutti zero tranne il coefficienti a j j , che compare in AEi j al posto i j.
Quindi A è una matrice diagonale con a11 = a22 = . . . = ann , cioè A = λI.
(20.23) Definizione. Si dice che sottoinsiemi S, S ′ ⊂ Pn (K ) sono proiettivamente equivalenti se esiste una
proiettività f : Pn (K ) → Pn (K ) tale che f (S ) = S ′ .
(20.24) Esempio. Quali insiemi di due punti sono proiettivamente equivalenti in P1 (R)? Quali in P1 (C)?
(20.25) Esempio. Siano ( x A, yA ) e ( x B , yB ) le coordinate di due punti A, B ∈ A2 (K). Se A ̸= B, l’equazione
cartesiana della retta per A e B si può trovare ragionando come segue: un punto X = ( x, y) sta sulla retta per A
e B se e soltanto se è allineato con A e B, cioè se e soltanto se il sottospazio affine generato dai tre punti A, B
e X ha dimensione 1. La sua chiusura proiettiva deve anche avere dimensione 1, e questo succede se e soltanto
se i tre punti di P2 (K)
[ x A : y A : 1],
[ x B : yB : 1],
[ x : y : 1]
sono allineati in P2 (K). Ma questo capita se e soltanto se
x A yA x
det yA yB y = 0.
1 1 1
§ 20.2.
INCIDENZA DI SOTTOSPAZI
(20.26) Se S, T ⊂ Pn (K ) sono due sottospazi proiettivi e dim (S ) + dim (T ) ≥ n, allora S ∩ T ̸= ∅, cioè S e T
sono incidenti.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
188
#11. SPAZI PROIETTIVI E PROIETTIVITÀ
Dim. Siano V e W i due sottospazi vettoriali di K n tali che P(V ) = S ⊂ P(K n+1 ) e P(W ) = T ⊂ P(K n+1 ).
Per definizione si ha dim (S ) = dim (V ) − 1, dim (T ) = dim (W ) − 1. Per la formula di Grassmann si ha
dim (V + W ) + dim (V ∩ W ) = dim (V ) + dim (W ), e quindi
dim (V ) + dim (W ) − dim (V ∩ W ) ≤ n + 1 = dim (K n+1 ).
Dato che dim (S ∩ T ) + 1 = dim (V ∩ W ), i due sottospazi hanno punti in comune se e solo se dim (V ∩ W ) ≥ 1
(per la definizione di spazio proiettivo); inoltre, se dim (S ) + dim (T ) ≥ n si ha
dim (S ∩ T ) = dim (V ∩ W ) − 1
≥ (dim V + dim W − n − 1) − 1
= (dim S + 1 + dim T + 1 − n − 1) − 1
≥ 0,
e quindi la tesi.
⨳
(20.27) Corollario. Due rette distinte nel piano proiettivo P2 (K ) si incontrano sempre in un unico punto. Una
retta e un piano che non la contiene, nello spazio proiettivo P3 (K ), si incontrano sempre in un unico punto.
Dim. Per (20.26) in entrambi i caso l’intersezione non è vuota. A questo punto osserviamo che esiste una unica
retta (proiettiva) passante per due punti distinti di uno spazio proiettivo, per cui due rette non possono avere due
punti in comune senza essere coincidenti. Per quanto riguarda la retta e il piano, si procede in modo analogo
⨳
(vedere anche esercizi (11.12) e (11.15)).
(20.28) Nello spazio proiettivo Pn (K ) comunque scelti n iperpiani, essi hanno almeno un punto in comune.
Dim. Di fatto si tratta di n sottospazi di K n+1 di dimensione n (codimensione 1), cioè di n equazioni (omogenee)
nelle n + 1 coordinate di K n+1 . La dimensione dello spazio di soluzioni è sempre almeno 1.
⨳
(20.29) Se H ⊂ Pn (K ) è un iperpiano e P un punto non in H, allora ogni retta passante per P incontra H
esattamente in un punto.
Dim. Sia H = P(V ) per il sottospazio vettoriale V ⊂ K n+1 . Dire che P = [ p] ∈ Pn (K ) non appartiene a
H significa dire che il vettore (non nullo) p non appartiene a V . Sia l una retta per P, cioè l = P(W ), con
W ⊂ K n+1 sottospazio vettoriale di dimensione 2, e P = [ p] ∈ l, cioè p ∈ W . Dato che la somma delle
dimensioni dim (l ) + dim (H ) è esattamente n, per (20.26) la retta e l’iperpiano devono avere necessariamente
almeno un punto in comune. Se ne avessero due distinti, risulterebbe che la dimensione dell’intersezione V ∩ W
sarebbe ≥ 2, e quindi W ⊂ V =⇒ l ⊂ H. Ma questo non può essere dato che P ̸∈ H (si veda anche l’esercizio
(11.15)).
⨳
(20.30) Nota. Mediante (20.29) si può dimostrare che è possibile definire la proiezione proiettando non solo
parallelamente (come abbiamo visto fare per spazi affini e euclidei), ma anche proiettando da un punto di
Pn (K ). Vediamo come: se Q ∈ Pn (K ) è un punto fissato e H e H ′ due iperpiani di Pn (K ) che non contengono
Q, per ogni [ x ] ∈ H esiste una (unica) retta passante per [ x ] e per Q; questa retta interseca H ′ in un unico
punto, che chiamiamo f ([ x ]). Abbiamo definito quindi una funzione f : H → H ′ (chiamata anche proiezione
prospettica, o prospettiva, di H su H ′ ). È un isomorfismo proiettivo tra H e H ′ . Per mostrare questo, osserviamo
che H = P(V ) e H ′ = P(V ′ ) con V e V ′ sottospazi di K n+1 di dimensione n. La funzione f è un isomorfismo
proiettivo se esiste F : V → V ′ lineare (isomorfismo di spazi vettoriali) che induce f . Ora, sia q ∈ K n+1 un
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
189
§ 20. SPAZI PROIETTIVI
vettore per cui [q] = Q. Dal momento che q ̸∈ V ′ , si può scrivere K n+1 come somma (diretta) di sottospazi
vettoriali
K n+1 = ⟨q⟩ ⊕ V ′
e di conseguenza si può definire la proiezione π : K n+1 → V ′ lungo la direzione del vettore q (meglio, del
sottospazio vettoriale generato da q, di dimensione 1). La restrizione di π a V è anch’essa un omomorfismo
di spazi vettoriali, e quindi lo è la composizione F : V → K n+1 → V ′ , che è un isomorfismo dato che q ̸∈ V .
Non rimane che mostrare che per ogni x ∈ V si ha [ F ( x )] = f ([ x ]). La retta per [ x ] e Q è il sottospazio (di
dimensione 2) generato da x e da q. È chiaro che la sua intersezione con V ′ coincide con la sua proiezione
mediante π definita sopra (che proietta su V ′ ), dato che la proiezione è parallela a q e [q] = Q è un punto della
retta (e quindi del piano che stiamo considerando), cioè che l’intersezione è generata da F ( x ).
(20.31) Nota. A patto di aggiungere i punti all’infinito, possiamo definire una proiezione prospettica anche
tra iperpiani affini (e quindi non sarà definita in alcuni punti degli iperpiani affini).
(20.32) Esempio. Proiettività P1 (R) → P1 (R) (circonferenza): in coordinate affini sono…Proiettività P1 (C) →
P1 (C) (sfera di Riemann): corrispondono in coordinate affini alle trasformazioni di Möbius
z 7→
az + b
cz + d
per ad − bc ̸= 0. Sottogruppo modulare: con coefficienti interi.
(20.33) Esempio. Siano A una matrice n × n a coefficienti in K, b e c due vettori di K n , e K il campo degli
scalari. La proiettività (ricordare il prodotto di matrici a blocchi)
[ ]
[
][ ] [
]
x
A b x
Ax + ub
7→ t
= t
u
c d u
c x + ud
in coordinate affini si scrive
1
[ ]
x
Ax
+
b
(
)
,
7→ ct x + d
1
1
cioè
Ax + b
.
ct x + d
Quando c = 0 (deve essere d ̸= 0 dato che la matrice completa è invertibile), non è altro che una trasformazione
affine. Altrimenti, manda l’iperpiano (affine) di equazione ct x + d = 0 all’infinito.
In generale, una proiettività f di P(V ) in sé induce una corrispondenza biunivoca tra gli iperpiani di V
(o, equivalentemente, gli iperpiani di P(V )) in sé. Se f manda l’iperpiano all’infinito in sé, allora deve essere
c = 0. Se invece c ̸= 0, non può mandare l’iperpiano all’infinito in sé. Cioè, manda l’iperpiano all’infinito
in sé se e solo se c = 0. In altre parole, le trasformazioni affini di An0 (K ) ⊂ Pn (K ) sono le restrizioni alla
parte affine An0 (K ) di tutte quelle proiettività di Pn (K ) che mandano l’iperpiano all’infinito in sé (si veda
l’esercizio (11.26)).
x 7→
(20.34) Esempio. Proiettiamo con una prospettiva E3 sul piano z = 0, con fuoco in (0, 0, 1): la linea
x
0
0 + t y
z−1
1
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
190
#11. SPAZI PROIETTIVI E PROIETTIVITÀ
passa per ( x, y, z ) e (0, 0, 1), e incontra il piano z = 0 per t =
x
x
1 − z
y 7→ y
z
1−z
1
, quindi la proiezione è
1−z
In coordinate omogenee diventa la funzione lineare
[ x : y : z : u] 7→ [ x : y : 0 : u − z ].
(20.35) Esempio. Proviamo a invertire la funzione S 2 → P1 (C) definita nell’esempio (20.5),
( x, y, z ) ∈ S 2 7→ [1 − z : x + iy] = [ x − iy : 1 + z ] ∈ P1 (C).
Se [w1 : w2 ] ∈ P1 (C), con wi ∈ C, se poniamo w =
w2
(per w2 ̸= 0) si ha [1 : w] = [1 :
w1
w2
w1 ]
e quindi basta
invertire la proiezione stereografica ed ottenere
2ℜ(w2 /w1 )
2ℜ(w)
x=
x= 2
|w| + 1
|w2 /w1 |2 + 1
2ℑ(w)
2ℑ(w2 /w1 )
⇐⇒ y =
y= 2
|w| + 1
|w2 /w1 |2 + 1
2
|w| − 1
|w2 /w1 |2 − 1
z=
z= 2
|w| + 1
|w2 /w1 |2 + 1
2ℜ(w2 /w1 )|w1 |2
2ℜ(w2 w1 )
x
=
=
2
2
|w2 | + |w1 |
|w2 |2 + |w1 |2
2ℑ(w2 /w1 )|w1 |2
2ℑ(w2 w1 )
y
=
=
2
2
|w2 | + |w1 |
|w2 |2 + |w1 |2
2
2
|w2 | − |w1 |
z=
|w2 |2 + |w1 |2
Se quindi scriviamo w1 = a + ib, w2 = c + id, la mappa si scrive
2ℜ((c + id )(a − ib))
1
2ℑ((c + id )(a − ib))
h(a, b, c, d ) = 2
a + b2 + c2 + d 2 2
c + d 2 − a2 − b2
2(ac + bd )
1
2(ad − cb)
= 2
a + b2 + c2 + d 2 2
c + d 2 − a2 − b2
Osserviamo che di fatto è una mappa definita su C2 ∖ {0} che passa al quoziente con l’azione di C∗ , e quindi
si può restringere ad una mappa sulla sfera S 3 ⊂ R4 definita da a2 + b2 + c2 + d 2 = 1 come
h : S3 → S2 .
Questa è una mappa molto importante in geometria e topologia, chiamata la mappa di Hopf , o anche fibrazione
di Hopf . Provare a dimostrare che le controimmagini dei punti di S 2 sono circonferenze disgiunte in S 3 .
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
191
§ 20. SPAZI PROIETTIVI
Figura 11.3: Immersione (non regolare e con auto-intersezioni) del piano proiettivo in E3 . r := 1;
plot3d([r*(1+cos(v))*cos(u), r*(1+cos(v))*sin(u), -tanh(2/3*(u-Pi))*r*sin(v)], u =
0 .. 2*Pi, v = 0 .. 2*Pi);
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
192
#11. SPAZI PROIETTIVI E PROIETTIVITÀ
Figura 11.4: Immersione (regolare senza auto-intersezioni: superficie di Boy) del piano proiettivo in E3 . X :=
(sqrt(2)*cos(2*u)*cos(v)^2 + cos(u)*sin(2*v)) / (2-sqrt(2)*sin(3*u)*sin(2*v)); Y :=
(sqrt(2)*sin(2*u)*cos(v)^2 - sin(u)*sin(2*v)) / (2-sqrt(2)*sin(3*u)*sin(2*v)); Z :=
3*cos(v)^2/(2-sqrt(2)*sin(3*u)*sin(2*v)); plot3d([X, Y, Z], u = -(1/2)*Pi .. (1/2)*Pi,
v = 0 .. Pi);
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
193
Esercizi
ESERCIZI
(11.1) Dimostrare che la definizione (20.1) di spazio proiettivo come spazio delle orbite mediante l’azione
del gruppo moltiplicativo del campo è equivalente (nel senso che gli insiemi ottenuti sono in corrispondenza
biunivoca) alla definizione della nota (20.4), cioè P(V ) è l’insieme di tutti i sottospazi di dimensione 1 di V .
(11.2) Dimostrare che P1 (R) è omeomorfo alla circonferenza S 1 .
*(11.3) Dimostrare che P1 (C) è omeomorfo alla sfera S 2 .
*(11.4) Dimostrare che tutti gli spazi proiettivi Pn (R) e Pn (C), per n ≥ 1, sono compatti. (Suggerimento:
invece che considerare lo spazio proiettivo come quoziente di Rn+1 ∖ {0} con l’azione del gruppo moltiplicativo
R∗ , si può considerare il quoziente solo della sfera S n ⊂ Rn+1 di equazione x02 + x12 + · · · + xn2 , che è compatta…
e quindi l’immagine di un compatto mediante la mappa (continua) quoziente è … )
(11.5) Dimostrare che A2 (R) è omeomorfo ad un disco aperto, e che quindi P2 (R) si può scrivere come
unione disgiunta di un disco aperto (la carta affine) e la retta di punti all’infinito (che, siccome è omeomorfa
a P1 (R), è omeomorfa a una circonferenza S 1 ).
(11.6) Dimostrare che ogni sottospazio proiettivo L ⊂ Pn (K ) di dimensione d è omeomorfo allo spazio
proiettivo Pd (K ).
(11.7) Si considerino i punti [1 : 2 : 3], [2 : 3 : 1] e [3 : 1 : 2] di P2 (R). Dimostrare che non sono
allineati (cioè che non c’è una retta proiettiva che passa per i tre punti). Sono punti impropri per la carta affine
{[1 : x : y] : x, y ∈ R} ⊂ P2 (R)?
(11.8) Si consideri il piano proiettivo P2 (R) con carta affine A2 (R) = {[1 : x : y]} come nell’esercizio
precedente. Esiste una retta in A2 (R) che ha come punti impropri [0 : 1 : 0] e [0 : 0 : 1]?
(11.9) Dimostrare che ogni retta del piano affine ha uno e uno solo punto all’infinito, in qualsiasi chiusura
proiettiva.
(11.10) Dimostrare che due rette distinte del piano proiettivo P2 (K ) hanno sempre uno e un solo punto in
comune (e quindi non ci sono rette parallele).
(11.11) Dimostrare che due rette parallele di A2 (K ) hanno lo stesso punto all’infinito in qualsiasi chiusura
proiettiva di A2 (K ) (cioè dimostrare che due rette con punti all’infinito distinti si devono incontrare).
(11.12) Dimostrare che per due punti distinti di Pn (K ) passa e una sola retta (sottospazio proiettivo di dimensione 1).
(11.13) Sia S ⊂ Pn (K ) il sottoinsieme di Pn (K ) definito come segue: presi in Pn (K ) d + 1 punti [ p0 ], [ p1 ], . . . , [ pd ],
i punti di S sono quelli che si possono scrivere (in coordinate omogenee) come combinazioni lineari
[λ0 p0 + λ1 p1 + · · · + λd pd ]
per certi coefficienti λi ∈ K non tutti nulli. Dimostrare che S è un sottospazio proiettivo e che ogni sottospazio
proiettivo di Pn (K ) si può scrivere in questo modo. (Vedi la definizione (20.18))
(11.14) Dimostrare che il sottospazio (proiettivo) di Pn (K ) generato da d + 1 punti è il più piccolo sottospazio
proiettivo che contiene tutti i d + 1 punti.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
194
#11. SPAZI PROIETTIVI E PROIETTIVITÀ
(11.15) Dimostrare che esiste uno ed un unico sottospazio proiettivo di dimensione d che passa per d + 1 punti
di Pn (K ) linearmente indipendenti.
(11.16) Dimostrare che una retta proiettiva è generata da due suoi punti distinti.
(11.17) Dimostrare che se un sottospazio proiettivo S di Pn (K ) passa per d + 1 punti, allora S contiene il
sottospazio proiettivo generato dai d + 1 punti (cioè l’unico spazio proiettivo di dimensione d dell’esercizio
(11.15)).
[ ]
1
(11.18) Scrivere la proiezione prospettica con centro nel punto
∈ A2 (R), dalla retta di equazione {( x, y) ∈
1
A2 (R) : y = 0} alla retta di equazione ( x, y) ∈ A2 (R) : x = 0}.
(11.19) Si scriva in coordinate affini (rispetto ad una carta) la proiezione prospettica di P2 (R) dove Q = [0 :
1 : 1], H = {[ x0 : x1 : x2 ] ∈ P2 (R) : x1 = 0} e H ′ = {[ x0 : x1 : x2 ] ∈ P2 (R) : x2 = 0}. È una trasformazione
affine di H in H ′ ?
(11.20) Determinare le equazioni omogenee (in P2 (R)) della retta di A2 (R) di equazione x + y = y − 1. Qual
è il suo punto all’infinito?
(11.21) Si considerino le rette di A2 (R) di equazione y = x + b, con b ∈ R. Calcolare, al variare di b, le
coordinate (omogenee) del punto all’infinito della retta.
(11.22) Si considerino le rette di A2 (R) di equazione y = mx, con m ∈ R, m ̸= 0. Calcolare, al variare di m,
le coordinate (omogenee) del punto all’infinito della retta.
*(11.23) Determinare le proiettività : P2 (R) → P2 (R) che fissano la retta (impropria) {x0 = 0} (cioè ogni
punto della retta impropria viene mandato in sé).
(11.24) È possibile scrivere una traslazione di A2 (R) come restrizione ad una carta affine di una proiettività
di P2 (R)?
[ ] [ ] [ ]
[ ] [ ] [ ]
0 1 0
0 1
2
(11.25) Esiste una proiettività che manda i punti , ,
di una carta affine in ,
e ?
0 0 1
0 0
0
*(11.26) Sia An (K ) ⊂ Pn (K ) una carta affine e T : An (K ) → An (K ) una affinità. Determinare (in un sistema
di riferimento fissato, se si crede) una proiettività P che manda An (K ) in sé (e quindi l’iperpiano dei punti
impropri in sé) e che ristretta a An (K ) sia proprio uguale a T . (Suggerimento: Si scriva T come x 7→ Ax + b per
una matrice A e un vettore b. Nel cercare la matrice F corrispondente della proiettività (che sarà una matrice
(n + 1) × (n + 1)), si osserva che se l’iperpiano dei punti impropri va in sé, allora la prima riga di F ha un
solo termine non zero… e a meno di moltiplicare F per una costante si può supporre questo termine uguale a
1 … poi si utilizzano b e A per riempire la matrice. Provare con matrici 3 × 3 all’inizio, per avere un’idea più
concreta. )
*(11.27) Mostrare che SO(3) ≈ P3 (R). (utilizzare l’esercizio (7.30) a pagina 113)
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
Appendice A
ALCUNI ESERCIZI SVOLTI
[[url:http://xkcd.com/356/]]
§ 1.
ESERCIZI SVOLTI
(1) Determinare gli elementi dei seguenti insiemi:
(i) {x ∈ Z : ∀z ∈ Z, ∃y ∈ Z : xz = y};
(ii) {x ∈ Z : ∃y ∈ Z : ∀z ∈ Z, xz = y};
(iii) {x ∈ R : ∃y ∈ Z : ∀z ∈ Q, xz = y}.
Sol:
195
196
#A. ALCUNI ESERCIZI SVOLTI
(i) Osserviamo che si può scrivere
{x ∈ Z : ∀z ∈ Z, ∃y ∈ Z : xz = y} = {x ∈ Z : ∀z ∈ Z, xz ∈ Z},
e dato che il prodotto di interi è sempre un numero intero si ha
{x ∈ Z : ∀z ∈ Z, xz ∈ Z} = Z.
(ii) Fissto un x ∈ Z, definiamo l’insieme
Sx = {xz : z ∈ Z}.
Allora si può scrivere
X = {x ∈ Z : ∃y ∈ Z : ∀z ∈ Z, xz = y} = {x ∈ Z : ∃y ∈ Z : Sx = {y}}.
Ora, si può facilmente vedere che
{0}
Sx =
l’insieme dei multipli di x
se x = 0
se x ̸= 0.
Quindi se x ̸= 0 sicuramente x ̸∈ X, mentre se x = 0 si ha x ∈ X. Segue che X = {0}.
(iii) Ora calcoliamo l’insieme Y = {x ∈ R : ∃y ∈ Z : ∀z ∈ Q, xz = y}. Si può procedere come sopra, oppure
nel modo seguente: se x0 ∈ Y , allora per definizione esiste y ∈ Z tale che x0 z = y per ogni z ∈ Q. Se
x0 ̸= 0, allora questo significa che esiste un certo intero y (fissato) per cui ogni z ∈ QQ è uguale a xy0 ,
ma questo è falso. Quindi necessariamente deve essere x0 = 0, cioè Y ⊂ {0}. Mostriamo che {0} ⊂ Y ,
cioè che 0 ∈ Y , ovvero
∃y ∈ Z : ∀z ∈ Q, 0z = y.
Come sopra, basta prendere y = 0. Questo significa che Y = {0}.
///
(2) Determinare se i seguenti insiemi sono aperti della topologia indicata. Quali sono chiusi?
(i) {x ∈ Q : x ≤ 2} (nella topologia di Q).
(ii) {x ∈ Q : x ≤ 2} (nella topologia di R).
(iii) {x ∈ Q : x 2 ≤ 2} (nella topologia di Q).
(iv) {x ∈ Q : x 2 ≤ 2} (nella topologia di R).
(v) {x ∈ R : x 2 ≤ 2} (nella topologia di R).
Sol: Sappiamo che nelle topologie di R e Q gli intervalli del tipo (−∞, b), (a, ∞) sono aperti. Questo
implica che gli intervalli del tipo [b, ∞), (−∞, a] sono chiusi (complementari di aperti).
(i) {x ∈ Q : x ≤ 2} (nella topologia di Q): è chiuso (perché si può scrivere come intervallo (−∞, 2]) e non
è aperto (perché il punto 2 non è interno).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
197
§ 1. ESERCIZI SVOLTI
(ii) {x ∈ Q : x ≤ 2} (nella topologia di R): non è chiuso (se fosse chiuso dovrebbe contenere tutti i suoi
punti
√ di accumulazione; ma basta prendere opportunamente una successione di razionali che converge
a 2 < 2 per notare che questo non è vero) e non è aperto (non solo 2 non è interno: nessun punto è
interno in R!).
√
(iii) {x ∈ Q : x 2 ≤ 2} (nella topologia di Q): Dal momento che 2 ̸∈ Q, si può scrivere
√ √
{x ∈ Q : x 2 ≤ 2} = [− 2, 2] ∩ Q
√ √
= (− 2, 2) ∩ Q
e quindi l’insieme preso in considerazione è sia chiuso che aperto.
(iv) {x ∈ Q : x 2 ≤ 2} (nella topologia di R): come sopra, non è né chiuso né aperto.
√ √
(v) {x ∈ R : x 2 ≤ 2} (nella topologia di R): qui l’insieme è uguale a [− 2, 2], che è chiuso e non è aperto
(gli estremi non sono interni ma appartengono all’intervallo).
///
(3) È vero che se un insieme X è finito allora è compatto per ogni topologia che si considera? E il viceversa
(cioè è vero che se un insieme è compatto rispetto ad ogni possibile topologia, allora ha un numero finito di
punti)?
Sol: Mostriamo che se un insieme X è finito allora è compatto per ogni topologia che si considera, cioè
ogni ricoprimento mediante aperti di X ammette un sottoricoprimento finito. Infatti, se {Ui } è un ricoprimento
di X, dal momento che X, essendo finito, ha un numero finito di sottoinsiemi, solo un numero finito degli
aperti che costituiscono il ricoprimento {Ui } sono distinti. Basta quindi eventualmente eliminare le ripetizioni
nel sottoricoprimento (cioè cancellare gli aperti Ui che compaiono più volte) per ottenere il sottoricoprimento
finito cercato.
Viceversa: mostriamo che se un insieme è compatto rispetto ad ogni possibile topologia, allora ha un numero finito di punti. In particolare, deve essere compatto rispetto alla topologia discreta (dato che è compatto
rispetto ad ogni possibile topologia), che ha per aperti tutti i sottoinsiemi di X. Ma allora deve esistere un sottoricoprimento finito di ogni ricoprimento: prendiamo come ricoprimento di X la famiglia di insiemi contenenti
un solo elemento di x:
∪
{x}.
X=
x∈X
Ma questo ricoprimento non ha sottoricoprimenti (se togliamo uno qualsiasi degli aperti {x} il punto x non è
coperto da un aperto del ricoprimento), e quindi deve essere necessariamente finito. Ma se tale ricoprimento
è finito, allora X ha un numero finito di punti. ///
(4) Determinare se i seguenti sottospazi di R2 (con la topologia metrica di R2 ) sono connessi oppure no.
(i) X = {( x, y) ∈ R2 : xy = 1};
(ii) Y = {( x, y) ∈ R2 : ( xy − 1)( x − y) = 0};
(iii) Z = {( x, y) ∈ R2 : x 2 y − xy2 − x + y = 0}.
Sol:
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
198
#A. ALCUNI ESERCIZI SVOLTI
(i) X = {( x, y) ∈ R2 : xy = 1}: consideriamo in R2 i due aperti U = {( x, y) ∈ R2 : x > 0 e V = {( x, y) ∈
R2 : x < 0}. Le intersezioni A = X ∩ U e B = X ∩ V sono non vuote (infatti (1, 1) ∈ A e (−1, −1) ∈ B),
disgiunte (dato che U ∩ V = ∅), tali che X = A ∪ B (dato che ( x, y) ∈ X ⇐⇒ xy = 1 =⇒ x ̸= 0)
e sono aperti nella topologia indotta di X (visto che U e V sono aperti nella topologia di R2 ). Questo
significa che X non è connesso.
(ii) Y = {( x, y) ∈ R2 : ( xy − 1)( x − y) = 0}: per la legge di annullamento del prodotto, ( xy − 1)( x − y) = 0
se e solo se uno dei due fattori ( xy − 1) e ( x − y) si annulla. Cioè, se indichiamo con R la retta {( x, y) ∈
R2 : x − y = 0}, si ha
Y = X ∪ R,
(Y è l’unione dell’iperbole X con la retta R). Ma osserviamo che X è unione dei suoi due rami A e B (vedi
sopra), che sono connessi (non è difficile trovare due funzioni continue e suriettive f : (−∞, 0) → B e
g: (0, ∞) → A). Quindi Y è unione dei tre spazi connessi A, B e R, e A ∩ R ̸= ∅, B ∩ R ̸= ∅. Possiamo
dedurre (per esempio, dalla proposizione 12.9) che Y è connesso (in questo caso basta una giustificazione
intuitiva).
(iii) Z = {( x, y) ∈ R2 : x 2 y − xy2 − x + y = 0}: risulta Z = Y .
///
(5) Si consideri la famiglia τ di tutti i sottoinsiemi di N = {0, 1, 2, . . . } costitutita dall’insieme vuoto, da
N e da tutti i sottoinsiemi del tipo
{1}, {1, 2}, {1, 2, 3}, {1, 2, 3, 4}, {1, 2, 3, 4, 5} . . .
È vero che τ è una topologia? Se sì, allora, rispetto a questa topologia, N è connesso? È compatto?
Sol: Per mostrare che è una topologia dobbiamo mostrare che ∅ ∈ τ, N ∈ τ, che l’unione di una famiglia
qualsiasi di elementi di τ è ancora un elemento di τ e che l’intersezione di una famiglia finita di elementi di
τ è ancora un elemento di τ. Osserviamo quindi che ogni elemento di τ diverso da ∅ e da N si può scrivere
come Un = {k ∈ N : 1 ≤ k ≤ n} per un certo n ≥ 1. Consideriamo quindi una famiglia (finita o infinita) di
aperti Uni . Sia X l’unione
∪
Uni .
X=
i
Vogliamo mostrare che X ∈ τ. Osserviamo che se x ∈ X e 1 ≤ y ≤ x, allora y ∈ X. Infatti, se x ∈ X, allora
esiste Uni per cui x ∈ Uni (oppure X = N, ma questo caso lo escludiamo perché banale). Ma dato che Uni
contiene tutti gli interi k ≥ 1 e k ≤ ni , deve essere x ≤ ni , e quindi Uni (e di conseguenza X) contiene tutti i
numeri y ≤ x, y ≥ 1. Ma questo significa che se X è limitato, allora esiste U M tale che X = U M , e quindi è
aperto. Ma se X non è limitato? Allora, per lo stesso argomento, risulta
X = {k ∈ N : 1 ≤ k} = {1, 2, . . . }
C’è quindi un problema: l’unico insieme di τ non limitato è N = {0, 1, 2, . . . }, che contiene in più l’elemento
0…Quindi τ non è una topologia.
Per chi vuole proseguire togliendo lo 0 da N…///
(6) Se X è uno spazio topologico con due sottospazi A e B non vuoti e disgiunti tali che A ∩ B = ∅, allora
è vero che X di certo non è connesso?
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
199
§ 1. ESERCIZI SVOLTI
Sol: No, basta prendere per esempio X = R, A = {0} e B = {1}. I due sottoinsiemi A e B sono non vuoti e
disgiunti, e A = A, per cui A ∩ B = ∅. Ma X = R è connesso. ///
(7) Determinare se l’intervallo I = {x, ∈ R : 0 ≤ x ≤ 1} meno un punto x0 ∈ I è compatto e connesso, al
variare di x0 . (I ∖ x0 = {x ∈ I : x ̸= x0 } ).
Sol: Per prima cosa dimostriamo che I ∖ {x0 } non è mai compatto. Per il teorema di Heine-Borel, basta
dimostrare che per ogni x0 ∈ I lo spazio I ∖ {x0 } non è chiuso nella topologia di R. Infatti, fissato x0 esiste una
successione {xn } in I ∖ {x0 } che converge a x0 , cioè x0 è di accumulazione per I ∖ {x0 }. Ma x0 ̸∈ I ∖ {x0 }, e
quindi abbiamo trovato un punto di accumulazione di I ∖ {x0 } non contenuto in I ∖ {x0 } (cioè esso non contiene
tutti i suoi punti di accumulazione, ovvero non è chiuso).
Per quanto riguarda la connessione, sappiamo che i sottoinsiemi connessi di R sono tutti e soli gli intervalli.
Ma I ∖ {x0 } è un intervallo se x0 = 0 oppure x0 = 1 (infatti, rispettivamente si ha (0, 1] e [0, 1) ), mentre non
lo è se 0 < x0 < 1. Se ne deduce immediatamente che:
se x0 = 0 oppure x0 = 1;
connesso
I ∖ {x0 } è:
non connesso se 0 < x0 1.
///
(8) Si consideri il sottoinsieme di R definito da
}
{
p
100
.
X = x ∈ R : x = , p, q ∈ Z, |pq| ≤ 10
q
Determinare quali delle seguenti affermazioni è vera (nella topologia euclidea di R):
(i) X è chiuso;
(ii) X è aperto;
(iii) X è compatto.
Sol: L’insieme X consiste di tutti i numeri reali che si possono scrivere come quoziente di due interi il cui
modulo del prodotto non supera 10100 (e quindi ha al più 100 cifre). Siano p e q due interi positivi (e quindi
100
p ≥ 1, q ≥ 1). Se pq ≤ 10100 , allora q ≤ 10p ≤ 10100 , dato che p ≥ 1. Lo stesso vale per q. Ne segue che
ci sono un numero finito di coppie ( p, q), con p ≥ 1, q ≥ 1 e tali che pq ≤ 10100 e quindi solo un insieme
finito di numeri (che chiamiamo X>0 che si possono scrivere come x = f racpq, con p ≥ 1 e q ≥ 1. Ora, se
p = 0 ci sono infiniti q tali che |pq| ≤ 10100 , ma tutti danno luogo allo stesso elemento 0 ∈ X. Invece, non può
essere q = 0. Da ciò si deduce che X può essere quindi scritto come l’unione di tre insiemi finiti: l’insieme X>0
definito sopra, l’insieme {0} e X<0 = −X>0 , cioè l’insieme degli opposti di tutti gli elementi di X<0 . Quindi X
è finito.
Ogni punto di R è chiuso; ogni unione finita di chiusi è chiusa; dunque ogni insieme finito di R è chiuso.
Pertanto X è chiuso.
Dato che R è connesso, non può contenere sottoinsiemi sia chiusi che aperti diversi da ∅ e R, quindi X non
è aperto.
X è anche compatto: da ogni ricoprimento mediante aperti di X si può estrarre un sottoricoprimento finito
come segue. Se {Ui }i∈J è la famiglia di aperti del ricoprimento, allora
∪
X⊂
Ui .
i∈J
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
200
#A. ALCUNI ESERCIZI SVOLTI
Per ogni x ∈ X, esiste quindi almeno un i ( x ) ∈ J tale che x ∈ Ui ( x ) (non è necessariamente unico). Fatta la
scelta per i ( x ), si ottiene facilmente che
∪
X⊂
Ui ( x ) ,
x∈X
e quindi esiste un sottoricoprimento finito di X, dato che X è finito. ///
(9) Si consideri nel piano euclideo E2 (con la topologia metrica) il sottoinsieme
X = {( x, y) ∈ E2 : x 2 − y2 ≤ 1}.
Determinare quali delle seguenti affermazioni è vera:
(i) X è chiuso;
(ii) X è aperto;
(iii) X è compatto;
(iv) X è connesso.
Sol: Osserviamo che la funzione f : E2 → R definita da f ( x, y) = x 2 − y2 è una funzione continua. Ma
allora la controimmagine di un chiuso di R è un chiuso di E2 , e la controimmagine di un aperto di R è un
aperto di E2 . La controimmagine dell’intervallo (−∞, 1] (che è un chiuso di R) è uguale a
f −1 ((−∞, 1]) = {( x, y) ∈ E2 : f ( x ) ∈ (−∞, 1]} = X,
e quindi X è chiuso.
X non è aperto: consideriamo per esempio il punto di coordinate (1, 0). Ogni suo intorno circolare contiene
punti del tipo (1 + ϵ, 0) e (1 − ϵ , 0), con ϵ > 0 piccolo a piacere. Ma (1 + ϵ )2 ≤ 1 accade solo per ϵ = 0, e
quindi (1, 0) non è interno a X.
Per il teorema di Heine-Borel, X è compatto se e solo se è chiuso e limitato. Dato che è chiuso, è compatto
se e solo se è limitato. Non è limitato: per ogni R ∈ R il punto di coordinate (0, R) appartiene a X, dato che
per ogni R accade che −R2 ≤ 1. Quindi non è compatto.
Per mostrare che è connesso, basta osservare che è connesso per archi: osserviamo che dal punto O = (0, 0)
si può raggiungere un qualsiasi punto ( x0 , y0 ) di X mediante un cammino rettilineo. Infatti, se x02 − y02 ≤ 1, allora
per ogni t ∈ [0, 1] si ha
(tx0 )2 − (ty0 )2 = t 2 ( x02 − y02 ) ≤ t 2 ≤ 1
, e quindi il punto γ (t ) = (tx0 , ty0 ) sta in X. Quindi γ (t ) definisce un cammino continuo che parte da (0, 0)
(per t = 0) e arriva a ( x0 , y0 ) (per t = 1), e X è connesso per archi.
///
(10) Determinare i punti di accumulazione in R del sottoinsieme di Q definito da
{
p
: p, q ∈ Z}.
10q
È vera o no la seguente uguaglianza?
{
p
p
: p, q ∈ Z} = {
: p, q ∈ Z}
q
10
100q
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
201
§ 1. ESERCIZI SVOLTI
p
Sol: Sia X = { q : p, q ∈ Z} il sottoinsieme di Q in questione. Si tratta di tutti i numeri razionali che
10
hanno rappresentazione decimale con un numero finito di cifre (anche dopo la virgola).
Prima di procedere, osserviamo che non tutti i numeri razionali si possono scrivere in forma decimale con
un numero finito di cifre: 13 e tutte le frazioni con gruppi di cifre periodiche non possono. Ma per ogni numero
reale x (razionale o no) esiste una successione di numeri decimali canonica (con numero di cifre crescente)
che converge a x: quella che si ottiene troncando alla q-esima cifra la parte decimale. Ciascuno dei termini
della successione è un elemento di X, per cui ogni numero reale è limite di una successione di elementi di X;
segue che la chiusura di X è uguale a R. Ora, i punti di R ∖ X sono sicuramente di accumulazione. Rimane da
vedere quali punti di X sono di accumulazione o, equivalentemente, quali punti di X sono isolati. Se esistesse
un punto x0 ∈ X isolato (cioè tale che esiste ϵ > 0 per cui nell’intervallo ( x0 − ϵ, x0 + ϵ ) non ci sono altri
elementi di X all’infuori di X), allora per un certo ϵ > 0 dovrebbe essere che nessun numero dell’intervallo
)
( p̄
p̄
,
+
ϵ
10q̄ 10q̄
è di X. Ma la somma di due frazioni in X è ancora in X (perché?), e quindi basta prendere un l intero abbastanza
1
p̄
1
grande per cui l < ϵ ed ottenere l’elemento q̄ + l di X che verifica le disuguaglianze
10
10
10
p̄
p̄
1
p̄
< q̄ + l < q̄ + ϵ .
q̄
10
10
10
10
Dunque tutti i numeri reali sono di accumulazione per X.
Ora, consideriamo i due insiemi
p
X = { q : p, q ∈ Z}
10
e
p
Y ={
: p, q ∈ Z}.
100q
Dato che 102 = 100, ogni elemento di Y si può scrivere come
p
p
= 2q ,
q
100
10
e quindi Y ⊂ X. Ma, viceversa, ogni elemento di X si può scrivere come
p
p · 10q
10q p
= q
=
,
q
q
10
10 · 10
100q
e quindi X ⊂ Y . Segue che X = Y . ///
(11) Quali tra i seguenti insiemi sono aperti (nelle topologie corrispondenti)? Quali chiusi? Quali compatti?
(i) {( x, y) ∈ R2 : x 2 + y2 ≤ 2xy + 1};
(ii) {(z, w) ∈ C2 : z2 − w3 = 1 = |z|2 − w3 };
(iii) {xeix : x > 0} ⊂ C ∼
= R2 ;
(iv) {( x, y) ∈ R2 : max(|x + y|, |x − y|) ≤ 1}.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
202
#A. ALCUNI ESERCIZI SVOLTI
Sol: L’insieme X = {( x, y) ∈ R2 : x 2 + y2 ≤ 2xy + 1} è anche l’insieme di soluzioni dell’equazione
x 2 + y2 − 2xy = ( x − y)2 ≤ 1,
cioè le controimmagini dell’intervallo chiuso [−1, 1] mediante la funzione continua
f ( x, y) = x − y.
Dunque X è chiuso. Si tratta della striscia compresa tra le rette di equazioni y = x − 1 e y = x + 1. Non è
vuoto ((0, 0) ∈ X) e non è tutto R2 ( (0, 2) ̸∈ X ), e quindi non è aperto (dato che gli unici aperti-chiusi di R2
sono l’insieme vuoto e R2 stesso). Il punto (n, n), per ogni n ∈ Z, è in X e quindi X non è limitato: X non è
compatto.
L’insieme X{(z, w) ∈ C2 : z2 − w3 = 1 = |z|2 − w3 } è chiuso, perché la funzione f : C2 → C2 definita da
f (z, w) = (z2 − w3 , |z|2 − w3 )
ha componenti continue e quindi è continua. Pertanto la controimmagine di (1, 1) ∈ C2 , che è un chiuso di C2 ,
è un chiuso. Osserviamo che se (z, w) ∈ X, allora
z2 = |z|2 ⇐⇒ z2 = zz ⇐⇒ z (z − z ) = 0
e quindi z è reale. Dunque X ̸= C2 . Il sistema ha soluzioni? Per esempio (z, w) = (1, 0) è una soluzione, e
quindi X ̸= ∅. Ne segue che X non può essere sia aperto che chiuso, e quindi non è aperto (dato che è chiuso).
Ora, è compatto se e solo se è limitato. Ora, per ogni t ∈ R esistono sicuramente dei w ∈ C tali che
w3 = t 2 − 1 ⇐⇒ t 2 − w3 = 1,
e quindi X non è limitato.
Passiamo a X = {xeix : x > 0} ⊂ C ∼
= R2 , come è rappresentato in figura:
20
10
–20
–10
10
20
–10
–20
–30
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
203
§ 1. ESERCIZI SVOLTI
Il punto 0 ∈ C è di accumulazione per X: infatti, nell l’intorno circolare Bϵ (0) ci sono sempre infiniti punti
di X
Bϵ (0) ∩ X = {xeix : 0 < x < ϵ }.
Dato che 0 ̸∈ X, X non è chiuso. Non è nemmeno aperto: in coordinate polari, X si scrive come {(r, θ ) : r =
θ},che non è un aperto di (0, ∞) × S 1 . Non è limitato, dato che |xeix | = |x|, e quindi non è compatto.
Finiamo con l’insieme X = {( x, y) ∈ R2 : max(|x + y|, |x − y|) ≤ 1}. Come sopra, risulta chiuso (dato che
controimmagine dell’intervallo chiuso (−∞, 1] mediante la funzione
f ( x, y) = max(|x + y|, |x − y|).
È il quadrato (chiuso) di R2 con vertici nei punti (±1, 0), (0, ±1), e quindi non è né vuoto né R2 : non è aperto.
È limitato: se max(|x + y|, |x − y|) ≤ 1, allora |x + y| ≤ 1, |x − y| ≤ 1 e quindi −1 ≤ x + y ≤ 1, −1 ≤ x − y ≤ 1,
−1 ≤ y − x ≤ 1. Sommando le prime due si ha −2 ≤ 2x ≤ 2 =⇒ −1 ≤ x ≤ 1. Sommando la prima e la terza
si ha −2 ≤ 2y ≤ 2 e quindi |y| ≤ 1. ///
Nota 1. Per favore usare l’italiano e la punteggiatura correttamente:
«Considero quindi i punti tali che f ( x, y) → x − y allora questi punti devono essere ≤ {1} =⇒
sono tutti punti di accumulazione e sono contenuti nel nostro insieme quindi il nostro insieme è
chiuso ma non è aperto perché se considero i punti ( x, y) che sono uguali al {1} allora questi
avranno un’intorno che non è completamente contenuto nel nostro insieme inoltre non è compatto
perché non è limitato»
Nota 2. È vero che la controimmagine di un aperto (risp. chiuso) mediante una funzione continua è un aperto
(risp. chiuso). Ma non è vero che la controimmagine di un non-aperto è per forza un non-aperto!
(12) Quali sono i punti di accumulazione dei seguenti insiemi di punti:
1
(i) {(1 + )eit ∈ C : t ∈ R, t > 0} ⊂ C;
t
p
(ii) { : p, q ∈ Z, 1 ≤ q2 ≤ 1000} ⊂ R;
q
p
(iii) { : p, q ∈ Z, q ≥ 1, p2 ≤ 1000} ⊂ R;
q
p
(iv) { : p, q ∈ Z, q ≥ 1000, p ≥ 1000} ⊂ R.
q
1
Sol: Se X = {(1 + )eit ∈ C : t ∈ R, t > 0} ⊂ C, allora X è l’immagine della funzione
t
f : (0, ∞) → C
definita da
1
f (t ) = (1 + )eit .
t
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
204
#A. ALCUNI ESERCIZI SVOLTI
1
0.5
–1
–0.5
0.5
1
–0.5
–1
Tutti i punti di A = (0, ∞) sono di accumulazione per il dominio A = (0, ∞), e quindi le immagini f (t ) sono
di accumulazione per X = f ( A). Mostriamo che anche tutti i punti della circonferenza unitaria S 1 = {z ∈ C :
|z| = 1} sono di accumulazione per X. Infatti, se z0 = eiθ0 è un punto della circonferenza, per ogni ϵ > 0 si ha
1
1
Bϵ (z0 ) ∩ X = {(1 + )eit : (1 + )eit − eiθ0 < ϵ , t > 0},
t
t
che contiene tutti i punti (con k ∈ Z, k > 0)
(1 +
1
)ei (θ0 +2kπ )
θ0 + 2kπ
tali che
1
< ϵ.
θ0 + 2kπ
Questi sono infiniti, se k → ∞. Vogliamo mostrare che se y ̸∈ X, allora |y| = 1. Infatti, sia |y| ̸= 1 e y ̸∈ X
un punto di accumulazione: se |y| < 1, y non può essere di accumulazione (perché?), quindi |y| > 1. Ora, sia
y = r0 eit0 , con r0 > 1 e t0 > 0. L’intorno Bϵ (y) contiene l’aperto
Uϵ ′ ,ϵ ′′ = {zeit : |z − z0 | < ϵ ′ , |t − t0 | < ϵ ′′ },
se ϵ ′ e ϵ ′′ sono abbastanza piccoli. Ma dato che y ̸∈ X, r0 ̸= 1 + 1/(t0 + 2kπ ) per tutti i k, e quindi per ϵ ′ e ϵ ′′
abbastanza piccoli Uϵ ′ ,ϵ ′′ non interseca X: y non può essere di accumulazione.
p
Veniamo a X = { : p, q ∈ Z, 1 ≤ q2 ≤ 1000} ⊂ R; in ogni intervallo [a, b] di R cadono un numero finito
q
di elementi di X, e quindi X non ha punti di accumulazione.
p
Se invece X = { : p, q ∈ Z, q ≥ 1, p2 ≤ 1000} ⊂ R, se x è di accumulazione, allora ci devono
q
essere infiniti p√
n /qn ∈ X√distinti che formano una successione convergente a X. Ma i pn possono assumere
solo valori tra − 1000 e 1000, mentre la successione qn necessariamente deve tendere a ∞: l’unico punto di
accumulazione è 0.
p
L’ultimo, X = { : p, q ∈ Z, q ≥ 1000, p ≥ 1000} ⊂ R, chiaramente ha tutta la semiretta R≥0 = [0, ∞) di
q
accumulazione. Infatti, se pn /qn è una successione di razionali positivi, 1000pn /(1000qn ) ∈ X per ogni n. ///
(13) Sia C ⊂ Q un sottospazio compatto di Q, con la topologia della metrica euclidea.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
205
§ 1. ESERCIZI SVOLTI
(i) C è chiuso (in Q)?
(ii) C è limitato?
(iii) Può essere connesso?
(iv) Si dia, se esiste, un esempio di un tale C che abbia un numero infinito (numerabile) di punti.
(v) Esiste un tale C con un insieme non numerabile di punti?
Sol: Ogni compatto in un Hausdorff (e quindi in un metrico) è chiuso, e quindi C è chiuso. Ogni compatto
in un metrico è limitato, e quindi C è limitato. Può essere connesso: basta che abbia un punto solo! Un compatto
di Q è l’insieme X = {0} ∪n≥1 {1/n}. I razionali sono numerabili, e quindi non possono avere sottoinsiemi non
numerabili. ///
(14) Sia Q la retta razionale con la topologia della metrica euclidea.
(i) Dimostrare che Q non è connesso, e determinarne le componenti connesse.
(ii) Si consideri l’insieme di tutti gli intervalli di Q del tipo
Uh,k = {x ∈ Q : h < x < k, con h e k in Z}.
Dimostrare che è una base per una topologia di Q.
(iii) Q è connesso rispetto alla topologia generata dalla base degli Uh,k ?
Sol: Le componenti connesse di Q sono i singoli punti: è un esercizio già svolto (quale?). Per mostrare
che l’insieme degli intervalli Uh,k è una base, basta osservare che ogni razionale è contenuto in qualche Uh,k ,
e che l’intersezione di Uh,k con Uh′ ,k ′ , quando non vuota, è uguale a Umax(h,h′ ),min(k,k ′ ) . Rispetto alla topologia
generata da questa base, Q è connesso: infatti, supponiamo che A ⊂ Q sia un insieme aperto e chiuso che
contiene n ∈ Z ⊂ Q. Allora, se n + 1 ̸∈ A, deve esistere un intorno Uh,k di n + 1 che non interseca A (dato
che A è anche chiuso). Ma ogni intorno della base di n ha intersezione non vuota con ogni intorno della base
di n + 1, e quindi deve essere necessariamente n + 1 ∈ A. Nello stesso modo si dimostra che se n ∈ A, allora
n − 1 ∈ A. Ma allora A, se A contiene 0 (e deve esistere un aperto chiuso che contiene 0!), contiene tutti i punti
interi Z, e quindi A = Q. ///
(15) Determinare quali dei seguenti sottoinsiemi sono aperti, chiusi, e compatti (nelle rispettive topologie).
(i) {( x, y) ∈ R2 : x 3 + 3x 2 y + 3xy2 + y ≥ 1};
(ii) {z ∈ C : z3 = −z};
(iii) {(z, w) ∈ C2 : z2 = w(w − 1)} ;
(iv) {( x, y) ∈ R2 : ( x 2 + y2 − 1)−1 ∈ Z};
√
(v) {t + −1t cos 1t : t ∈ R ∖ {0}}.
Sol: L’insieme X = {( x, y) ∈ R2 : x 3 + 3x 2 y + 3xy2 + y ≥ 1} è la controimmagine dell’intervallo chiuso
[1, ∞) mediante la funzione continua
f ( x, y) = ( x + y)3 − y3 + y.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
206
#A. ALCUNI ESERCIZI SVOLTI
Quindi è chiuso. Rato che R2 è connesso, per mostrare che non è aperto basta vedere che non è né ∅ né R2 .
Infatti, f (0, 0) = 0 < 1 =⇒ X ̸= R2 . Analogamente, f (0, 2) = 2 > 1 =⇒ X ̸= ∅. Il sottoinsieme chiuso X è
compatto se e solo se è limitato (per il teorema di Heine–Borel): non è limitato, dato che contiene tutti i punti
(0, n), con n ≥ 1.
Passiamo ora a X = {z ∈ C : z3 = −z}. In coordinate polari, z = reiθ , dunque X è il sottoinsieme di tutti i
punti di C che soddisfano l’equazione
r 3 e3iθ = re(π−θ )i ,
da cui segue
3
(r ≥ 0)
r =r
3θ = π − θ + 2kπ con k ∈ Z,
r ∈ {0, 1}
π
π
con k ∈ Z.
θ = +k
4
2
Si tratta quindi di cinque punti 0, eπ/4+kπ/2 , con k = 0, 1, 2, 3. È un insieme finito di punti: è chiuso, compatto
e non aperto.
L’insieme X = {(z, w) ∈ C2 : z2 = w(w − 1)} è la controimmagine in C2 di {0} (chiuso di C) mediante la
funzione C2 → C definita da
f (z, w) = z2 − w(w − 1).
Si tratta quindi di un chiuso. Per mostrare che non è aperto, come sopra, mostriamo che X ̸= ∅ e che X ̸= C2 .
Infatti (0, 0) ∈ X =⇒ X ̸= ∅; (1, 0) ̸∈ X =⇒ √X ̸= C2 . Per la compattezza, occorre vedere se è limitato.
Basta prendere, per n grande, la coppia (z, w) = ( n(n − 1), n) e osservare che è un elemento di X per ogni n:
quindi non è limitato.
L’insieme X = {( x, y) ∈ R2 : ( x 2 + y2 − 1)−1 ∈ Z} è la controimmagine di Z mediante la funzione
f ( x, y) = ( x 2 + y2 − 1)−1 ,
che però non è definita su R2 ma sui punti di R2 per cui x 2 + y2 ̸= 1 (cioè tutti i punti tranne quelli della
circonferenza unitaria). Si ha che ( x, y) ∈ X se e solo se esiste k ∈ Z tale che
1
=k
x 2 + y2 − 1
dove
√ k ∈ Z. L’intero k non può essere zero, e quindi si tratta dell’unione di tutte le circonferenze di raggio
1
1 + , con k ̸= 0 (per k = −1 si ha la circonferenza degenere di raggio nullo). L’insieme X è chiuso nel sotk
√
tospazio U = R2 ∖ {x 2 + y2 = 1}, ma non è chiuso in R2 : la successione di punti di X definita da ( 1 + 1/n, 0)
converge a (1, 0) che non è in X. Non è nemmeno limitato, e quindi non è compatto. Se X è un aperto di U,
allora esiste V ⊂ R2 aperto di R2 tale che V ∩ U = X, e quindi X sarebbe aperto di R2 perché intersezione di
due aperti U e V . Viceversa, se X è aperto di R2 , allora è aperto di U dato che X = U ∩ X.
L’insieme non è un aperto di R2 (e quindi non è aperto di U): basta mostrare che l’intersezione con l’asse
delle x non è un aperto di R (per lo stesso motivo). Si tratta di
√
Y = {x ∈ R : x = ± 1 + 1/k}.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
207
§ 1. ESERCIZI SVOLTI
√
√
Non
perché,
per
esempio,
il
punto
2
non
è
interno:
ogni
intorno
circolare
di
2 di raggio piú piccolo
√ è aperto
√
di 2 − 3/2 non√contiene altri punti di Y .
√
Sia X = {t + −1t cos 1t : t ∈ R ∖ {0}}. Per n ≥ 1 intero, il punto zn = 1n + −1 cosn n è di X; la successione
converge a 0, e quindi 0 è di accumulazione per X ma non è di X: dunque X non è chiuso di C. Se X fosse
aperto, sarebbe aperta l’intersezione con l’asse reale, cioè l’insieme
{t ∈ R : t ̸= 0, cos
1
1 π
= 0} = {t ∈ R : t ̸= 0, = + kπ, con k ∈ Z},
t
t
2
cioè
{
1
: k ∈ Z}.
π/2 + kπ
Come sopra, questo non è un insieme aperto di R (basta osservare che per esempio 2/π non è interno). ///
(16) Dimostrare le seguenti proposizioni, quando sono vere. Altrimenti mostrare che sono false. Per ogni
x ∈ R, denotiamo con [ x ] la classe di equivalenza di x rispetto alla relazione x ∼ y ⇐⇒ x − y ∈ Z. Sullo
spazio quoziente X = R/∼ (omeomorfo alla circonferenza S 1 ) definitamo la funzione
d ([ x ], [y]) = inf{|s − t| : s ∈ [ x ], t ∈ [y]}.
(i) La funzione d : X × X → R è ben definita.
(ii) La funzione d : X × X → R è una metrica, tale che per ogni x, y, z ∈ R si ha
d ([ x ], [y]) = d ([ x + z ], [y + z ]).
(iii) La distanza tra due punti di X non può essere maggiore di 1/2.
1
(iv) Presi n punti a caso su X, ce ne sono sempre almeno due con distanza d ([ x1 ], [ x2 ]) ≤ .
n
1
(v) Per n ≥ 1 intero, e α ∈ R qualsiasi, esiste un intero q ∈ [1, n] tale che d ([qα ], [0]) ≤
.
n+1
(vi) Dedurre il Teorema di approssimazione di Dirichlet: per ogni n ≥ 1 intero e α ∈ R, esiste una coppia di
1
interi p, q ∈ Z tali che |qα − p| ≤
e q ≤ n.
n+1
Sol: (a), (b) sono facili, tenuto conto che
d ([ x ], [y]) = inf{|x − y + k| : k ∈ Z} = min{|x − y + k| : k ∈ Z}.
Osserviamo che dalla proprietà d ([ x + z ], [y + z ]) = d ([ x ], [y]) segue che d ([ x ], [y]) = d ([ x − y], [0]). Ogni
classe [ x ] ha un unico rappresentante t ∈ [ x ] con 0 ≤ t < 1, e X è uguale all’intervallo [0, 1] con gli estremi
identificati (una circonferenza). L’omeomorfismo con la circonferenza è dato dalla funzione θ 7→ e2πiθ .
Punto (c): Se t ∈ [0, 1/2], allora d ([t ], [0]) = t. Se t ∈ [1/2, 1], allora d ([t ], [0]) = 1 − t. Cioè d ([t ], [0]) =
min(t, 1 − t ). Dato che t + (1 − t ) = 1, il minimo tra t è 1 − t è certamente minore di 1/2. Il massimo si ha per
t = 1/2, cioè d ([1/2], [0]) = 1/2. In generale, dati due punti qualsiasi [ x ] e [y], si ha
d ([ x ], [y]) = d ([ x − y], [0]) ≤ 1/2,
e dunque la distanza tra due punti di X non può essere maggiore di 1/2.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
208
#A. ALCUNI ESERCIZI SVOLTI
Punto (d): Siano [ x1 ],[ x2 ], …[ xn ] gli n punti arbitrari di X. Le distanze reciproche sono le stesse dei punti
[ x1 − x1 ], [ x2 − x1 ], …, [ xn − x1 ] traslati di −x1 , cioè possiamo sempre supporre che x1 = 0. Possiamo naturalmente supporre che xi ∈ [0, 1) per ogni i. Supponiamo per assurdo che non esistano due punti con distanza
minore o uguale a 1/n, cioè tutte le coppie di punti distano almeno 1/n. Riordinando gli indici, si ha
0 = x1 ≤ x2 ≤ . . . xn < 1.
Dato che per ipotesi d ([ xi+1 ], [ xi ]) > n1 , per ogni i = 1 . . . , (n − 1), si ha
1
1
< d ([ xi+1 − xi ], [0]) = min( xi+1 − xi , 1 − xi+1 + xi ) =⇒ xi+1 − xi >
n
n
(dato che il minimo di due numeri in [0, 1) è piú grande di 1/n, entrambi lo devono essere, e quindi in particolare
uno dei due). Ma allora
xn = xn − x0 = ( x1 − x0 ) + ( x2 − x1 ) + . . . + ( xn − xn−1 ) >
1 1
1
+ + . . . + = 1,
n n
n
assurdo.
Il punto (e) segue dal (d), prendendo in considerazione gli n + 1 punti di X
[ x0 ] = [0], [ x1 ] = [α ], . . . , [ xn ] = [nα ].
Esistono i e j in 0, 1, . . . , n tali che
d ([iα ], [ jα ]) ≤
1
,
n+1
e dunque (supponendo i < j)
d ([( j − i )α ], [0]) ≤
1
,
n+1
cioè l’asserto con q = j − i. Se i, j ∈ [0, n] e i < j, allora j − i = q ∈ [1, n].
1
Passo emph(f): se α ∈ R e n ≥ 1, sappiamo che esiste q ∈ Z, 1 ≤ q ≤ n tale che d ([qα ], [0]) ≤
. Ma
n+1
dato che esiste p ∈ Z tale che
d ([qα ], [0]) = |qα − p|,
si ha che esistono p, q ∈ Z tali che 1 ≤ q ≤ n e |qα − p| ≤
1
. ///
n+1
(17) Utilizzando eventualmente il risultato dell’esercizio precedente, calcolare i punti di accumulazione
dei seguenti sottoinsiemi di R.
√
(i) {a + b 3 : a, b ∈ Q};
√
(ii) {a + b 3 : a, b ∈ Z};
(iii) {a + b log2 3 : a, b ∈ Z} (perché log2 3 è irrazionale?);
(iv) {
2h
: h, k ∈ Z}.
3k
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
209
§ 1. ESERCIZI SVOLTI
√
Sol: Passo (a): X = {a + b 3 : a, b ∈ Q}; dato che X ⊃ Q, i punti di accumulazione di Q sono anche punti
di accumulazione di X. Ma tutti i punti di R sono di accumulazione per Q, e quindi tutti i punti di R sono di
accumulazione per X.
√
Passo (b): una
dimostrazione
completa
(senza
presupporre
altro)
è
la
seguente.
Sia
X
=
{a
+
b
3 : a, b ∈
√
Z}; il numero 3 è irrazionale (perché?). Mostriamo che tutti i punti di R sono di accumulazione per X, cioè
che per ogni ϵ > 0 e per√ogni x ∈ R esistono punti di X in Bϵ ( x ), cioè che per ogni ϵ , per ogni x ∈ R esistono
a, b ∈ Z tali che |a +√b 3 − x| < ϵ . Sia n un intero fissato. Per l’esercizio precedente, esistono una coppia di
interi p, q tali che |q 3 − p| < 1n , con 1 ≤ q ≤ n, e cioè (dividendo per q)
√
p
1
| 3− | <
.
q
nq
Supponiamo, senza perdere in generalità, che p e q siano privi di fattori comuni (altrimenti …) e positivi. Per
ogni a, b si ha quindi
√
p √
p
|a + b 3 − x| = |a + b( + 3 − ) − x|
q
q
√
p
p
≤ |a + b − x| + |b( 3 − )|
q
q
p
|b|
≤ |a + b − x| + .
q
nq
Osserviamo ora che (nella notazione dell’esercizio precedente) i q punti
p
p
[0 ], [ ], . . . , [ j ] . . .
q
q
con j = 0, . . . , (q − 1) sono tutti distinti: infatti se esistono 0 ≤ i < j < q tali che [i qp ] = [ j qp ] allora esiste
k ∈ Z tale che
j p = i p + kq ⇐⇒ ( j − i ) p = kq,
e questo non è possibile se p e q non hanno divisori in comune. Ma allora i punti [0], [ qp ], . . . , [ j qp ] . . . non sono
altro che i q punti
j
q−1
1
].
[0 ], [ ], . . . [ ], . . . [
q
q
q
Ogni x ∈ R, a meno di somma con un intero, dista certamente meno di
a,b, con 0 ≤ b ≤ q, tali che |a + b qp − x| <
1
da uno di questi punti, cioè esistono
q
1
. Ma allora esistono esistono a, b tali che
q
|b| 1 1 2
p
≤ + ≤ .
|a + b − x| +
q
nq q n q
La tesi segue se al crescere di n, il corrispondente q = qn tende all’infinito. Supponiamo di no: allora la
pn
(definita dalla coppia p, q del teorema di Dirichlet al variare di n) è una successione di numeri
successione
qn
√
razionali con denominatore qn limitato.Ma per ogni n si ha | 3 − qpnn | < nq1n → 0, e dunque la successione
√
converge a 3 (che non è razionale). Dato che la successione dei denominatori qn è limitata (ipotesi di assurdo),
pn
esiste una sottosuccessione qni costante. Ma la sottosuccessione qni è sottosuccessione di una successione
i
√
convergente (a 3), e quindi è convergente. Dato che il denominatore qni è costante, anche il numeratore pni è
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
210
#A. ALCUNI ESERCIZI SVOLTI
definitivamente costante: cioè la sottosuccessione
pni
qni
da un certo i in poi è costante (e quindi è uguale al suo
√
limite, che è il limite di pn /qn ). Questo è assurdo, perché vorrebbe dire che 3 è razionale.
Passo (c): Come sopra, dato che log2 3 è irrazionale, tutti numeri reali sono di accumulazione. Perché è
irrazionale? Perché p/q = log2 3 ⇐⇒ 2 p = 3q , e 2 e 3 sono coprimi.
2h
Passo (d): consideriamo il logaritmo di X = { k : h, k ∈ Z}, cioè
3
Y = {log2
2h
: h, k ∈ Z}.
3k
Si può scrivere anche
Y = {h + k log2 3h, k ∈ Z} ⊂ R.
I punti di accumulazione di Y in R sono tutti i punti di R, e dunque i punti di accumulazione di X sono tutti i
punti di R il cui logaritmo è un punto di accumulazione di Y , cioè la semiretta [0, ∞). ///
(18) Sia X uno spazio topologico. Dimostrare (o falsificare) le seguenti affermazioni.
(i) Le componenti connesse di X sono sottoinsiemi sia aperti che chiusi di X.
(ii) Se X ha un numero finito di componenti connesse, allora queste sono sia aperte che chiuse.
(iii) Se A è un sottoinsieme denso di X (cioè la cui chiusura è X), e B ⊂ X è un altro sottoinsieme tale che
B ⊃ A, allora B è denso in X.
(iv) Se X è connesso, allora ogni sottoinsieme denso di X è connesso.
(v) Se X è omeomorfo a [0, 1), allora X è omeomorfo anche a [0, 1].
Sol: Sono tutti esercizi assegnati in precedenza: le componenti connesse non sono sia aperti che chiusi
(esempio: Q). Se ce ne sono un numero finito, allora sí (dato che sono comunque dei chiusi). Se A è denso in
X e B contiene A, allora A ⊂ B =⇒ A ⊂ B, e dunque B = X (da cui segue che B è denso). Non è vero che
se X è connesso, allora i sottoinsiemi densi sono connessi (si pensi a Q ⊂ R oppure a R ∖ {0} ⊂ R. I due
intervalli [0, 1) e [0, 1] non sono omeomorfi, dato che uno è compatto e l’altro no, e quindi non è vero che se
X è omeomorfo all’uno deve essere omeomorfo all’altro. ///
(19) Si determinino i punti di accumulazione dei seguenti sottoinsiemi di R o di C (nella topologia della
metrica euclidea di R o di C rispettivamente), e determinarne la chiusura (in R o in C). Quali sono compatti?
Quali sono chiusi?
p
(i) X1 = { : p, q ∈ Z, q ̸= 0, p = q mod 100};
q
p2
: p, q ∈ Z, q ̸= 0};
q
p
(iii) X3 = { 2
: p, q ∈ Z};
q +1
(ii) X2 = {
(iv) Z1 = {z ∈ C : 1 + z2 ∈ Q};
(v) Z2 = {z ∈ C : z (1 − z ) ∈ Z}.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
211
§ 1. ESERCIZI SVOLTI
Sol: (a): Si ha che
q + 100k
: q ̸= 0, (q, k ) ∈ Z2 }
q
k
= {1 + 100 : q ̸= 0, (q, k ) ∈ Z2 }
q
= 1 + {100x : x ∈ Q}
X1 = {
= 1 + 100Q = Q,
e dunque tutti i punti di R sono di accumulazione per X1 ; la chiusura è X1 = Q = R. Non è né chiuso né
limitato, e dunque non è compatto.
a
(b) Osserviamo che se ∈ Q, con a, b ∈ Z e b ̸= 0, allora se anche a ̸= 0 si ha
b
a a2
= .
b ab
a
a2
Altrimenti, se a = 0, 0 = = . Quindi Q ⊂ X2 ⊂ Q, cioè X2 = Q. Ne segue che X2 non è chiuso, non è
b
b
compatto, e ha tutti i numeri reali come punti di accumulazione. Osserviamo che la distanza tra i due quadrati
( p − 1)2 e p2 successivi è 2p − 1:
p2 − ( p − 1)2 = 2p − 1.
p2 ( p − 1)2
p2
e
è uguale a 2p−1
. Allora se si ha una successione qnn → α ∈ R
q
q
q
2pn −1
pn
con qn → ∞, deve essere qn = 2 qn − q1n → 0, e quindi qpnn → 0, cioè l’unico punto di accumulazione di
X2 è 0. Dato che sopra abbiamo mostrato che i punti di accumulazione di X2 sono tutti i punti di R, possiamo
concludere che R = {0}, e dunque che R non è una estensione di Q, come si è soliti credere. (Dove è l’errore
nel ragionamento appena visto?)
p
: p, q ∈ Z}. Per ogni α ∈ R, per ogni q ∈ Z, per ogni p ∈ Z, la distanza
(c) Veniamo ora a X3 = { 2
q +1
p
1
tra q2p+1 e qp+1
2 +1 è q2 +1 , quindi per ogni α ∈ R e per ogni q ∈ Z esiste p ∈ Z tale che la distanza tra α e
2
q +1
1
1
, cioè per r = 2
si ha
non superi 2
q +1
q +1
Allora per ogni q la distanza tra
Br (α ) ∋
q2
p
.
+1
Ma allora ogni α ∈ R è di accumulazione per X3 , dato che per ogni ϵ > 0 esiste r ∈ Z tale che
Dunque X3 non è chiuso, non è compatto, e ha per chiusura R.
(d) Osserviamo che se w ∈ C si ha che
w ∈ Q ⇐⇒ w + 1 ∈ Q,
e dunque
Z1 = {x ∈ C : z2 ∈ Q}.
Se z = a + ib, con a, b ∈ R, allora
(a + ib)2 = a2 − b2 + 2iab.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
1
q2 +1
< ϵ.
212
#A. ALCUNI ESERCIZI SVOLTI
Quindi (a + ib)2 ∈ Q se e solo se ab = 0 e a2 − b2 ∈ Q. Dunque z ∈ Z1 è del tipo a oppure ib, con a, b ∈ R.
L’insieme dei reali a tali che a2 ∈ Q contiene in particolare i razionali, e quindi Z1 contiene Q. L’insieme dei
complessi ib, con b ∈ R, tali che (ib)2 ∈ Q come sopra contiene una copia di Q, e quindi Z1 contiene iQ.
Dunque i punti di accumulazione per Z1 sono i numeri reali (di accumulazione per la copia Q) oppure l’asse
dei numeri puramente immaginari iR (di accumulazione per la copia iQ). Non è chiuso, non è compatto. La
sua chiusura è
Z1 = {a + ib ∈ C : a, b ∈ R, ab = 0}.
(e) Si ha
Z2 = {z ∈ C : z2 − z ∈ Z}
= {z ∈ C : z2 − z = k, per qualche k ∈ Z}
√
1 ± 1 + 4k
={
: k ∈ Z}
2
Per ogni R > 0, l’insieme dei punti di Z2 nell’intorno B0 (R) è finito, e quindi Z2 non ha punti di accumulazione
in C. È un sottospazio chiuso di C, perché controimmagine di Z ⊂ C (che è chiuso) mediante la funzione
continua z 7→ z (1 − z ). Non è limitato, per quanto visto sopra, e quindi non è compatto. Non avendo punti di
accumulazione (anche, essendo chiuso), si ha Z2 = Z2 . ///
(20) Determinare quali dei seguenti sottospazi (se ben definiti e rispetto alle topologie dello spazio ambiente) sono chiusi, connessi, compatti o limitati.
(i) {( x, y) ∈ R2 : x 3 + 3x 2 y + 2xy2 + y3 = 1};
(ii) {( x, y) ∈ C2 : x 2 − 2y ≥ 0};
(iii) {( x, y) ∈ C2 : x 2 − 2y2 − 4xy = 0};
(iv) {( x, y) ∈ R2 : x 2 + 2y2 − 4xy = 0};
(v) {( x, y) ∈ R2 : x 2 − 2y2 − 4xy = 0}.
Sol: (a) L’insieme è chiuso (perché?). Sia s =
si ha che c’è un omeomorfismo
x
. Se y = 0, si ha x 3 = 1 =⇒ x = 1. Altrimenti, per y ̸= 0,
y
X ={( x, y) ∈ R2 : x 3 + 3x 2 y + 2xy2 + y3 = 1, y ̸= 0}
1
∼
= {(s, y) ∈ R2 : s3 + 3s2 + 2s + 1 = 3 , y ̸= 0}.
y
Nelle (s, y) con y ̸= 0, si scrive anche
y = √3
1
s3 + 3s2 + 2s + 1
,
e dunque certamente non è limitato. L’insieme originale non può quindi essere compatto né limitato (perché?).
La funzione s3 + s2 + 2s + 1 ha un solo zero, che chiamiamo s0 (basta calcolarne i valori –positivi– nei punti
√
1
in cui la derivata prima si annulla: −1 ± 33); la curva di equazione y = √3
ha un asintoto
s3 + 3s2 + 2s + 1
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
213
§ 2. SECONDA PARTE
verticale in s0 ; è di grado dispari, quindi è negativa prima di s0 e positiva dopo s0 ; Si ha
{( x, y) ∈ R2 : x 3 + 3x 2 y + 2xy2 + y3 = 1}
= {( x, y) ∈ R2 : x = ys, y ̸= 0, y = (s3 + 3s2 + 2s + 1)−1/3 , per s ∈ R, s ̸= s0 } ∪ {(1, 0)}
(
)
= { s(s3 + 3s2 + 2s + 1)−1/3 , (s3 + 3s2 + 2s + 1)−1/3 : s ∈ R, s ̸= s0 } ∪ {(1, 0)}
Per s → ±∞ si ha
(
)
s(s3 + 3s2 + 2s + 1)−1/3 , (s3 + 3s2 + 2s + 1)−1/3 → (1, 0),
e dunque il sottoinsieme è connesso.
(b) L’insieme non è ben definito, dato che il campo C non è ordinato (la disequazione x 2 − 2y ≥ 0 non ha
senso).
(c) La forma quadratica ha matrice associata
[
]
1 −2
,
−2 −2
il cui determinante è negativo: dunque esiste una trasformazione lineare (su C) che trasforma l’equazione in
una equazione del tipo x 2 − y2 = 0: l’unione di due rette incidenti in C2 . È chiuso, non limitato, non compatto,
connesso (perché unione unione di due connessi con intersezione uguale a un punto).
(d) La forma quadratica ha matrice associata
[
]
1 −2
,
−2 2
il cui determinante è negativo. Come sopra, esiste una trasformazione lineare (questa volta su R) che trasforma
l’equazione in una equazione del tipo x 2 − y2 = 0. È chiuso, non limitato, non compatto, connesso (perché
unione unione di due connessi con intersezione uguale a un punto).
(e) Come per il punto (c). ///
§ 2.
SECONDA PARTE
[[url:http://xkcd.com/246/]]
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
214
#A. ALCUNI ESERCIZI SVOLTI
[
]
a b
(21) Sia X = GL(2, R) il gruppo delle matrici invertibili 2 × 2
e G il sottogruppo delle matrici
c d
]
[
α 0
diagonali
di GL(2, R) (e quindi con αβ ̸= 0). Consideriamo l’azione di G su X data da
0 β
( g, x ) 7→ g · x = gx
per ogni g ∈ G e x ∈ X (dove gx indica il prodotto righe per colonne delle matrici g e x). Determinare quali
delle seguenti matrici appartengono alla medesima G-orbita.
[
] [
] [
]
0 1 −1 0
0 −1
,
,
.
1 0
0 −1 1 0
[
Sol: Due matrici
che
] [ ′ ′]
a b
a b
e ′
appartengono alla medesima G-orbita se esistono α, β in R ∖ {0} tali
c d′
c d
[
][
] [ ′ ′]
α 0 a b
a b
= ′
.
c d′
0 β c d
Osserviamo quindi che
[
][
] [
]
α 0 0 1
0 α
=
,
0 β 1 0
β 0
[
][
] [
]
α 0 −1 0
−α 0
=
.
0 β 0 −1
0 −β
Dal momento che non è possibile trovare α e β tali che
[
] [
]
0 α
−1 0
=
,
β 0
0 −1
la prima e la seconda non stanno nella stessa orbita. Invece la prima e la terza stanno nella stessa orbita, dato
che per α = −1 e β = 1 si ha
[
] [
]
0 α
0 −1
=
.
β 0
1 0
La seconda e la terza quindi non stanno nella stessa orbita: se così fosse se ne dedurrebbe che anche la prima
e la seconda stanno nella stessa orbita, ma abbiamo visto che questo è falso. ///
(22) Si consideri l’insieme X di tutte le rette del piano affine A2 (R). Per ogni punto p ∈ A2 (R) sia
B p ⊂ X l’insieme di tutte le rette che passano per p. La famiglia di sottoinsiemi composta da tutti gli elementi
di X e dai B p è una base per una topologia? Se sì, qual è la topologia generata?
Sol: Ricordiamo che una famiglia di sottoinsiemi B ⊂ 2X di un insieme X si dice base se le seguenti
proprietà sono soddisfatte:
(i) per ogni x ∈ X esiste almeno un elemento della base B ∈ B che contiene x (equivalentemente, X =
∪
B∈B B).
(ii) Se B1 , B2 ∈ B e x ∈ B1 ∩ B2 , allora esiste Bx ∈ B tale che x ∈ B ⊂ B1 ∩ B2 (equivalentemente, B1 ∩ B2
è unione di elementi della base).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
215
§ 2. SECONDA PARTE
Per definizione tutti i punti (visti come insiemi di un elemento solo – sono rette affini, conunque) di X sono
elementi della base, per cui sicuramente la prima delle due condizioni è soddisfatta.
Per quanto riguarda la seconda, siano B1 , B2 ∈ B e x ∈ B1 ∩ B2 . Se B1 e B2 sono entrambi punti di X (cioè
rette di A2 ), allora esiste x nell’intersezione se e solo se i punti coincidono, e quindi è verificata. Se B1 è un
punto di X (cioè una retta) e B2 è un fascio di rette (per un certo punto p di A2 (R)), allora l’intersezione è
vuota, e non c’è niente da verificare, se la retta non è del fascio; altrimenti l’intersezione è B1 stesso ed anche
in questo caso la condizione è soddisfatta.
In ultimo, se B1 e B2 sono fasci di rette per i punti p1 e p2 , allora se p1 = p2 la condizione è verificata,
dato che B1 = B2 . Altrimenti B1 ∩ B2 è l’insieme di tutte le rette che passano sia per p che per q. Questo è un
insieme con un solo elemento, e per definizione è della base.
L’insieme B è quindi una base di intorni per X. Dato che tutti i punti di X sono elementi della base, in
particolare sono aperti: uno spazio topologico i cui punti sono aperti ha necessariamente la topologia discreta.
///
(23) Nello spazio proiettivo di dimensione 3 reale P3 (R) si consideri l’insieme X di tutte le rette passanti
per un punto fissato A. Si dimostri che l’insieme X è (in corrispondenza biunivoca con) uno spazio proiettivo
(reale) di dimensione 2: determinare una biiezione tra X e un iperpiano di P3 (R) che non contiene A.
Sol: Dal momento che un iperpiano di P3 (R) è uno spazio proiettivo di dimensione 2, basta determinare
la biiezione tra X e un iperpiano π non contenente A. Sia r ∈ X una retta per X. Questa ha uno e un solo punto
di intersezione con π. Infatti, se ne avesse due l’intera retta dovrebbe essere contenuta in π, ma questo è assurdo
dato che A ̸∈ π. Questo definisce una funzione f : X → π.
La funzione f è iniettiva: se due rette r1 e r2 passanti per A intersecano π nel medesimo punto, allora (dato
che la retta per due punti è unica) le due rette coincidono. Se invece x ∈ π è un qualsiasi punto di π, allora
esiste (unica) la retta per x e A, e quindi esiste un elemento di X che viene mandato da f in x: f è suriettiva.
///
(24) Nel piano euclideo E2 = R2 (con la topologia euclidea) si consideri la circonferenza C di equazione
( x − 2 )2 + ( y − 2 )2 = 1
e la retta r di equazione
x + y = 1.
Si determini la distanza d (C, r ) di C da r, dimostrando (o assumendo) che
d (C, r ) = inf{|p − q| : p ∈ C, q ∈ r}.
Sol: Siano pm ∈ C e qm ∈ r i punti che realizzano il minimo. Fissato pm , quindi qm è il punto di minima
distanza da pm e quindi il vettore qm − pm è ortogonale alla retta r. Ogni altro punto della retta ha distanza
maggiore strettamente. Ancora, fissato qm sulla retta, il punto pm sulla circonferenza deve appartenere alla retta
passante per il centro della circonferenza e qm ed ogni altro punto ha distanza strettamente maggiore. Quindi,
bisogna trovare la retta per il centro della circonferenza ortogonale a r: essa è la bisettrice
quadrante.
√ del primo
√
√
√
√
I due punti sono quindi qm = (1/2, 1/2) e pm = (2 − 2/2, 2 − 2/2) e la loro distanza 11/2 − 3 2 = 23 2 − 1.
///
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
216
#A. ALCUNI ESERCIZI SVOLTI
(25) Si consideri la funzione
ϕ: Z × R → R
definita ponendo
ϕ(k, x ) = 2k x,
per ogni k ∈ Z e x ∈ R.
(i) La funzione ϕ definisce una azione di Z su R?
(ii) L’azione è fedele?
(iii) L’azione è transitiva?
(iv) Qual è lo stabilizzatore di 0 ∈ R? E di x ̸= 0?
(v) Lo spazio quoziente (con la topologia quoziente) è compatto? Connesso?
(vi) Quali sono gli intorni aperti (nella topologia quoziente) della classe [0] dello spazio quoziente?
Sol: La funzione ϕ definisce una azione: basta osservare che ϕ(0, x ) = 20 x = x per ogni x e che ϕ(h +
k, x ) = ϕ(h, ϕ(k, x )), visto che
2h+k x = 2h 2k x.
L’azione è fedele: la mappa x 7→ 2k x è la mappa identica solo se k = 0. L’azione non è transitiva. Per esempio,
k · 0 = 2k 0 = 0 per ogni k ∈ Z. Lo stabilizzatore di 0 è Z, mentre lo stabilizzatore di un punto x ̸= 0 è
k ∈ Z : 2k x = x ⇐⇒ 2k = 1 ⇐⇒ k = 0.
Lo spazio quoziente è compatto, perché immagine continua dell’intervallo [−1, 1] mediante la proiezione sul
quoziente q : X → X/G, dove X = R e G = Z. Infatti, basta mostrare che q([−1, 1]) = X/G, cioè che ogni
orbita di un punto di R ha intersezione non vuota con [−1, 1]. Ma per ogni x, esiste certamente k tale che
|2k x| ≤ 1: basta prendere k → −∞. Analogamente, X/G è connesso perché immagine continua mediante
la mappa quoziente q del connesso X = R. Gli intorni aperti della classe [0] ∈ X/G sono tutti gli insiemi
U ⊂ X/G tali che q−1 (U ) è aperto di X. Ora, q−1 ([0] = {0}, dato che 0 costituisce una G-orbita a sé. Ma se
q−1 (U ) contiene 0 ed è aperto, allora contiene un intervallo (−ϵ , ϵ ), con ϵ > 0. Ma, come per l’intervallo
[−1, 1], ogni G orbita in X interseca l’intervallo (−ϵ , ϵ ), e quindi U per essere aperto in X/G deve contenere
ogni orbita di X: l’unico intorno aperto di [0] in X/G è X/G. ///
(26) Si consideri lo spazio G di tutte le matrici della forma
[
]
1 t
Mt =
,
0 1
al variare di t ∈ R, con la topologia (metrica) di GL(2, R).
(i) Si dimostri che G è omeomorfo a R, e che è un gruppo topologico rispetto al prodotto di matrici.
(ii) Si determini GO = G ∩ O(2) (cioè l’insieme di tutte le matrici Mt con Mt ortogonale).
(iii) Si faccia agire G su R2 con la moltiplicazione
] [ ]
[
(
[ ])
x
1 t
x
.
·
7→
Mt ,
0 1 y
y
Cosa sono le orbite di questa azione?
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
217
§ 2. SECONDA PARTE
[
]
1 t
Sol: L’omeomorfismo cercato è f (t ) =
. È una isometria e quindi un omeomorfismo. È anche un
0 1
omomorfismo di gruppi (uno additivo, l’altro moltiplicativo): G è un gruppo topologico isomorfo a R, rispetto
al prodotto di matrici. Le matrici ortogonali sono solo l’identità. Le orbite dell’azione sono gli insiemi del tipo
[
] [ ] [ ]
[ ]
1 t
x0
x0
y
·
=
+t 0 ,
0 1 y0
y0
0
quindi sono rette di R2 , se y0 ̸= 0. Altrimenti, sono i singoli punti dell’asse delle x (autospazio della matrice).
///
(27) Una omotetia con centro Q e ragione q ∈ R è una mappa f : A2 (R) → A2 (R) definita da
P 7→ Q + q(P − Q).
Siano A, B, C tre punti nel piano affine A2 (R) e l una retta di A2 (R). Quali delle seguenti affermazioni sono
vere? (Dimostrare quelle vere, fornire controesempi per quelle false.)
1 Se la retta l non passa per A, B, C, allora incontra due dei lati del triangolo ABC, oppure nessuno.
2 Supponiamo che la retta l passi per un punto A′ del lato AC e per un punto B′ del lato BC. La retta l
è parallela al lato AB se e soltanto se il triangolo ABC è immagine del triangolo A′ B′C mediante una
omotetia.
3 Date due costanti q A e qB , la composizione delle omotetie di centro A e ragione q A e di centro B e ragione
qB è una traslazione.
Sol: Supponiamo che l non passi per A, B e C e che incontri almeno uno dei lati in un punto Q. Supponiamo
che Q ∈ AB. Deve essere A ̸= B (altrimenti Q = A = B), e quindi esiste un sistema di riferimento affine che
contiene i due punto A e B. Nel sistema di riferimento si ha A = (0, 0), B = (1, 0) e C = (a, b) per certi
a, b ∈ R. Allora Q = (q, 0), con q ∈ (0, 1). I tre punti sono allineati se e solo se b = 0, e la proposizione è
facilmente verificabile in questo caso. Altrimenti, possiamo considerare il riferimento affine formato dai punti
A, B e C, in cui a = 0, b = 1.
Se l è parallela a uno dei lati, per il teorema di Talete la proposizione è vera. Altrimenti, dato che in
particolare non è parallela a BC, supponiamo che l incontri la retta per BC, che ha equazione parametrica
[ ] [ ]
[ ]
x
1
−1
=
+h
y
0
1
in un certo punto di coordinate
(1 − h, h),
per un certo h ∈ R. Allora il punto sulla retta AC della retta l è quello (di coordinate (0, k ) per un certo k ∈ R)
tale che
(q, 0), (0, k ), (1 − h, h)
sono allineati, cioè
q 0 1 − h
h = 0.
det 0 k
1 1
1
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
218
#A. ALCUNI ESERCIZI SVOLTI
Con qualche conto si deduce che quindi
qk − qh − k + kh = 0
=⇒
k=
qh
.
q−1+h
qx
è monotona decrescente (calcolare la derivata!), ha un
q−1+x
asintoto verticale in x = 1 − q > 0 e tende a q se x → ±∞. Inoltre fq (1) = 1. Quindi fq ( x ) ∈ (0, 1) se e solo
se x ̸∈ (0, 1), cioè l incontra BC (cioè h ∈ (0, 1) ) se e solo se l non incontra AC (cioè k ̸∈ (0, 1)).
Punto (b): la retta l è parallela a AB se e solo se B′ − A′ = q( B − A) per un certo q. L’omotetia (che
necessariamente ha centro in C) esiste se e solo se esiste q tale che
Per ogni q ∈ (0, 1), la funzione fq ( x ) =
A′ = C + q( A − C ),
B′ = C + q ( B − C ).
Esistono certamente q A e qB compresi tra 0 e 1 tali che A′ = C + q A ( A − C ), B′ = C + qB ( B − C ). Quindi
B′ − A′ = qB ( B − C ) − q A ( A − C ),
e l è parallela a AB se e solo se
qB ( B − C ) − q A ( A − C ) = q( B − A) = q( B − C ) − q( A − C )
per un q ∈ R. Ma B − C e A − C sono linearmente indipendenti, e quindi questo accade solo se
qB = q = q A,
cioè se e soltanto se è possibile definire l’omotetia.
Per il (c): in generale la composizione di due omotetie non è una traslazione: basta prendere due omotetie
con lo stesso centro. Una traslazione non banale non ha punti fissati, mentre ogni omotetia fissa il centro. Se i
centri A e B sono diversi, può essere che la composizione sia una traslazione:
P 7→ A + q A (P − A) = P′ 7→ B + qB (P′ − B) = B + qB ( A + q A (P − A) − B)
= B + qB ( A − B) + qB q A (P − A)
= P + ( B − P + qB A − qB B + qB q A P − qB q A A)
e basta che sia q AqB = 1 per avere la traslazione
P 7→ P + (1 − q A )( B − A).
///
(28) In E3 , si consideri il piano p passante per i tre punti A = (1, 2, 0), B = (2, 0, 1) e C = (0, 1, 2).
1 Scrivere l’equazione cartesiana e parametrica del piano.
2 Calcolarne la distanza dall’origine e dal punto (1, 2, 3).
3 Determinare le proiezioni su piano p dei punti (1, 0, 0), (0, 1, 0) e (0, 0, 1).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
219
§ 2. SECONDA PARTE
Sol: L’equazione parametrica è
1 + s − t
2 − 2 s − t
s+2t
,
l’equazione cartesiana è
x + y + z = 3.
√
La distanza dall’origine e dal punto (1, 2, 3) è 3. Le proiezioni su p dei punti (1, 0, 0), (0, 1, 0) e (0, 0, 1)
sono 1/3(5, 2, 2) e le sue permutazioni cicliche (perché?).
///
(29) Sia r la retta di E2 passante per (1, 0) e (0, 2). Si scrivano le equazioni delle seguenti isometrie:
1 Riflessione attorno a r.
2 Le traslazioni che mandano r in sé.
3 Le rotazioni che mandano r in sé.
4 Descrivere, se possibile, il gruppo di tutte le isometrie che mandano r in sé, e il suo sottogruppo di tutte
le isometrie che mandano ogni punto di r in sé.
Sol: a) L’equazione parametrica della retta r è
[ ] [ ]
[ ]
x
1
−1
=
+t
.
y
0
2
Quindi la proiezione di un punto P = ( x̄, ȳ) su r è
[[ ] [ ]] [ ]
x̄
1
−1
−
·
[ ]
[ ]
ȳ
0
2 −1
1
projr (P ) =
+
0
2
12 + 22
[[ ] [
] [ ]]
1 4
1 −2 x̄
+
=
−2 4 ȳ
5 2
Allora il punto riflesso è
P′ = projr (P ) + (projr (P ) − P )
[[ ] [
] [ ]] [ ]
2 4
1 −2 x̄
x̄
=
+
−
2
−2
4
ȳ
ȳ
5
]] [ ]
] [
[ ] [ [
2 1 −2
2 4
1 0 x̄
+
−
=
0 1 ȳ
5 2
5 −2 4
][ ]
[ ] [
−3/5 −4/5 x̄
8/5
.
+
=
−4/5 3/5 ȳ
4/5
b) Sia A = (1, 0) e B = (0, 2). Una traslazione che manda r in sé deve mandare A in un punto A′ della
retta, e quindi le traslazioni sono tutte e sole quelle che si scrivono come
P 7→ P + c( B − A)
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
220
#A. ALCUNI ESERCIZI SVOLTI
per un certo c ∈ R, e quindi si scrivono come
[ ]
[ ]
[ ]
x
−1
x
7→
+c
.
y
2
y
c) Se una rotazione R (non banale) manda la retta r in sé, allora il centro della rotazione deve essere sulla
retta. Infatti, per assurdo, supponiamo che una rotazione non banale con centro in C ̸∈ r mandi r in sé. Sia Q il
punto di r con distanza minima da C (cioè la proiezione ortogonale di C su r), e Q′ la sua immagine mediante
la rotazione. Dato che una rotazione conserva le distanze, la distanza di Q′ da C è uguale alla distanza di
Q da C, e quindi deve essere Q′ = Q, visto che il punto con distanza minima è unico. Quindi la rotazione
R fissa i due punti distinti C e Q, e questo è assurdo perché rotazioni non banali fissano solo il centro di
rotazione. Ora, supponiamo che C sia sulla retta r. Un punto P ∈ r deve andare in un altro punto P′ di r tale
che P′ − C = k (P − C ) (dato che C, P e P′ sono allineati) e |P′ − C|2 = |P − C|2 (dato che una rotazione è una
isometria). Quindi k = −1 (altrimenti la rotazione è banale) e la rotazione è di angolo π. Scriviamo la rotazione
di angolo π attorno a un punto C: è la riflessione rispetto a C, quindi si scrive come
P 7→ C + (C − P ).
Dato che C = (1 − t, 2t ) per un certo t ∈ R, la rotazione si scrive come
[ ]
[
] [ ]
x
1−t
x
7→ 2
−
y
2t
y
d) Le isometrie che mandano r in sé contengono la riflessione a), le traslazioni b) e le rotazioni c), piú tutte
le loro composizioni. Ce ne sono altre? Supponiamo che f : E2 → E2 sia una isometria che manda r in sé. Sia
A′ = f ( A) ∈ r. Allora la composizione
P 7→ f (P ) 7→ f (P ) − ( A′ − A)
è una isometria f ′ che manda A in f ( A) − A′ + A = A. La matrice associata M è ortogonale (dato che è
una isometria). Se det ( M ) = 1 (cioè se M ∈ SO(2)), allora f ′ è una rotazione attorno ad A di angolo π. Se
det ( M ) = −1, allora f ′ è una riflessione lungo una retta: può essere la riflessione lungo r o lungo la retta
r ′ ortogonale a r passante per A. Se G è quindi il gruppo generato dalle riflessioni lungo le due rette r e r ′
(gruppo con 4 elementi), necessariamente f ′ è un elemento del gruppo G. Ne segue che il gruppo cercato ha
per elementi le isometrie
P 7→ gA (P ) + c( B − A),
dove gA ∈ G e c ∈ R. L’unico elemento che manda ogni punto di r in sé è la riflessione lungo r, ed è un
sottogruppo del gruppo di tutte le isometrie. Esercizio: dimostrare che è un gruppo. ///
(30) In P3 (R) con coordinate omogenee [ x0 : x1 : x2 : x3 ], sia Q il punto [0 : 1 : 1 : 1], H e H ′ i piani
H = {x1 = 0} e H ′ = {x2 = 0}.
1 Si scriva, in coordinate affini (rispetto a opportune carte) la proiezione prospettica f da H a H ′ con
centro in Q.
2 Si consideri in H (con coordinate proiettive [ x0 : x2 : x3 ]) la retta di equazione x2 = x3 . Qual è la sua
immagine in H ′ ?
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
221
§ 2. SECONDA PARTE
3 Si consideri in H la conica di equazione x0 x2 = x32 . Qual è la sua immagine in H ′ ?
Sol: Si consideri il piano all’infinito x0 = 0, e le coorispondenti coordinate affini ( x, y, z ) di A3 (R) ⊂
P3 ( R ) .
a) Siano (y, z ) le coordinate affini della parte affine di H (che è il piano yz) e ( x, z ) la coordinate affini
della parte affine di H ′ (che è il piano xz). Se P = (0, y, z ) è un punto di H, la retta per P e Q ha punti
0
1
y + t 1 ,
z
1
e passa per H ′ se y + t = 0. La proiezione prospettica è quindi
′
0
x −y
y 7→ 0 = 0 .
z
z′
z−y
Ora, da x ′ = −y e z′ = z − y deduciamo che y = −x ′ e z = z′ − x ′ , e quindi:
b) l’equazione dell’immagine della retta y = z in H ′ è
−x ′ = z′ − x ′ ⇐⇒ z′ = 0.
c) Analogamente, l’equazione dell’immagine della conica di equazione y = z2 (è una parabola) è
−x ′ = (z′ − x ′ )2 ⇐⇒ z′ 2 + x ′ 2 − 2z′ x ′ + x ′ = 0.
///
(31) Sia G = GL(2, R) il gruppo delle matrici 2 × 2 invertibili a coefficienti reali, e X lo spazio di tutte le
matrici 2 × 2 a coefficienti reali. Sia φ : G × X → X la funzione
φ( A, M ) = AM A−1 ,
definita per ogni A ∈ G e ogni M ∈ X.
(i) Mostrare che è una azione di G su X.
(ii) L’azione è transitiva?
[
]
1 0
(iii) Si calcoli lo stabilizzatore della matrice identica
, e si dica se è un sottogruppo compatto.
0 1
]
[
0 −1
è un sottogruppo compatto?
(iv) Lo stabilizzatore di J =
1 0
Sol: (a): Occorre verificare le due proprietà (esercizio).
(b): L’azione non è transitiva, dato che, per esempio det ( AM A−1 ) = det ( M ) (e quindi matrici in una stessa
orbita hanno lo stesso determinante). Non tutte le matrici hanno lo stesso determinante (di conseguenza non
sono tutte simili tra loro), e quindi non c’è una sola orbita. Due matrici sono nella stessa orbita se e solo se sono
simili. (c) Lo stabilizzatore della matrice identica è tutto G. (d) Lo
di J non è un sottogruppo
]
[ stabilizzatore
c 0
, con c ∈ R. ///
compatto, dato che contiene tutti i multipli della matrice identica
0 c
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
222
#A. ALCUNI ESERCIZI SVOLTI
1 0 t
(32) Si consideri lo spazio G di tutte le matrici 3 × 3 della forma Mt = 0 1 0 , al variare di t ∈ R, con
0 0 1
la topologia (metrica) di GL(3, R).
(i) Si dimostri che G è omeomorfo a R, e che è un gruppo topologico rispetto al prodotto di matrici.
(ii) Si determini GO = G ∩ O(3) (cioè l’insieme di tutte le matrici Mt con Mt ortogonale).
(iii) Si faccia agire G su R3 con la moltiplicazione matrice/vettore. Cosa sono le orbite di questa azione?
1 0 t
Sol: L’om(e)omorfismo è t 7→ 0 1 0. Le matrici ortogonali sono quelle (quella) con t = 0. Le orbite
0 0 1
sono rette di R3 , oppure punti (del piano z = 0). ///
(33) Sia Y l’insieme di tutte le rette affini di A2 (R). Si consideri la mappa g: Y → P2 (R) che associa
alla retta di equazione ax + by + c = 0 la terna di coordinate omogenee [a : b : c].
(i) Mostrare che la funzione g è ben definita e iniettiva.
(ii) Determinare l’immagine di g in P2 (R).
(iii) Sia A un punto qualsiasi di A2 (R), e X ⊂ Y l’insieme delle rette per A (fascio di rette per un punto).
Mostrare che l’immagine di X in P2 (R) è una retta proiettiva.
(iv) Mostrare che tre punti P = ( x, y), A = ( x A, yA ) e B =
il determinante della matrice
x x A
y yA
1 1
( x B , yB ) di A2 (R) sono allineati se e soltanto se
x B
yB
1
è uguale a zero.
Sol: (a) La funzione g è ben definita: i coefficienti di una equazione non possono essere tutti nulli, e se
ax + by + c = 0 e a′ x + b′ y + c′ = 0 sono due equazioni della medesima retta r, allora se A e B sono due punti
distinti di r, di coordinate ( x A, yA ) e ( x B , yB ), si ha
ax A + byA + c = 0
ax B + byB + c = 0
a′ x A + b′ yA + c′ = 0
a′ x B + b′ yB + c′ = 0.
Ora, A ̸= B se e soltanto se ( x A, yA, 1) e ( x B , yB , 1) sono linearmente indipendenti. Quindi il rango della matrice
]
[
x A yA 1
M=
x B yB 1
è uguale a due, e il nucleo dell’applicazione lineare indotta da M : R3 → R2 ha dimensione uguale a 1. Ma
] a
[
x A yA 1
b = 0
x B yB 1
c
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
223
§ 2. SECONDA PARTE
se e soltanto se
ax A + byA + c = 0
ax B + byB + c = 0,
e quindi se (a, b, c) e (a′ , b′ , c′ ) sono entrambe nel nucleo di M sono linearmente dipendenti, cioè esiste λ tale
che a′ = λa, b′ = λb e c′ = λc, cioè [a : b : c] = [a′ : b′ : c′ ]. La funzione è anche iniettiva: infatti se r e
r ′ sono due rette di equazioni ax + by + c e a′ x + b′ y + c′ rispettivamente, allora g(r ) = g(r ′ ) se e soltanto se
[a : b : c] = [a′ : b′ : c′ ]. Ma la retta r ′ di equazione λax + λby + λc = 0 coincide con la retta r, dunque r = r ′ .
(b) Se ax + by + c = 0 è l’equazione di una retta, allora (a, b) ̸= (0, 0). L’immagine di g in P2 (R) è quindi
l’insieme dei punti [a : b : c] tali che (a, b) ̸= (0, 0), cioè il complementare del punto [0 : 0 : 1] ∈ P2 (R).
(c) Il fascio di rette X per un punto A di coordinate ( x A, yA ) ha per immagine l’insieme dei punti [a : b : c]
di Y tali che ax A + byA + c = 0, cioè è l’intersezione di Y con una retta proiettiva di P2 (R) (l’equazione in
a, b, c è omogenea di primo grado).
(d) Supponiamo che i tre punti P, A, B siano distinti. Essi sono allineati se e soltanto se esiste t ∈ R tale
che P = A + t ( B − A), se e soltanto se P − A e B − A sono linearmente dipendenti. Ma dato che
[
]
x x A x B
x − x A x A x B − x A
x − xA xB − xA
det y yA yB = det y − yA yA yB − x A = − det
y − y A yB − y A
1 1 1
1−1 1
1−1
questo accade se e soltanto se il determinante in questione è zero. Se invece i tre punti non sono distinti, allora
sono certamente allineati e il determinante è certamente zero. Allo stesso risultato si perviene se si considera
che nella chiusura proiettiva i punti A = [ x A : yA : 1], B = [ x B : yB : 1] e P = [ x : y : 1] sono allineati se e
soltanto se i tre vettori delle coordinate omogenee sono linearmente dipendenti. ///
(34) Sia S 1 ⊂ E2 una circonferenza di raggio 1 nel piano euclideo, e Y l’insieme di tutte le rette di
come nell’esercizio precedente. Si dia a Y la topologia indotta da quella di P2 (R), mediante l’inclusione
g(Y ) ⊂ P2 (R). Sia X = {( A, B) ∈ S 1 × S 1 : A ̸= B} e f : X → Y la mappa che associa alla coppia di punti
( A, B) la retta che passa per A e B. Allora:
E2 ,
(i) La funzione f è ben definita e continua.
(ii) Esiste una funzione continua f˜ : S 1 × S 1 → Y di cui f è la restrizione.
(iii) Per ogni punto A della circonferenza la retta f˜( A, A) è tangente alla circonferenza in A (cioè interseca
S 1 in un solo punto).
(iv) L’immagine di f˜ in Y (e quindi in P2 (R) mediante g) è un sottospazio chiuso?
Sol: (a) La funzione f è ben definita perché per due punti distinti di E2 esiste unica la retta r ∈ Y per questi
punti. Per mostrare che è continua, consideriamo la composizione con g, gf : X → P2 (R). Se A = ( x A, yA ) e
B = ( x B , yB ), allora la retta f ( A, B) ha equazione
x x A x B
det y yA yB = (yA − yB ) x − ( x A − x B )y + ( x A yB − yA x B ) = 0,
1 1 1
e quindi
gf ( A, B) = [yA − yB : x B − x A : x A yB − yA x B ].
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
224
#A. ALCUNI ESERCIZI SVOLTI
Le componenti sono tutte polinomi (di primo e secondo grado) e quindi f (e quindi gf ) è continua.
(b) La funzione continua f˜ è definita semplicemente da
f˜( A, B) = g−1 [yA − yB : x B − x A : x A yB − yA x B ].
Poniamo x A = cos α, yA = sin α, x B = cos β, yB = sin β. Quindi
f˜( A, B) = g−1 [sin α − sin β : cos β − cos α : cos α sin β − cos β sin α ]
= [sin α − sin β : cos β − cos α : sin(β − α )]
Ricordiamo le formule di prostaferesi? Le usiamo per il prossimo passaggio.
α+β
α−β
α+β
α−β
sin
: 2 sin
sin
: sin(β − α )]
2
2
2
2
α + β sin(β − α )
α+β
: 2 sin
:
= [2 cos
]
α−β
2
2
sin(
)
2
= [2 cos
Ora, se poniamo β − α = δ, si ha che A → B se e soltanto se δ → 0, e quindi occorre considerare il limite per
δ → 0 del punto in P2 (R)
2α + δ
sin δ
2α + δ
: 2 sin
:
],
[2 cos
−δ
2
2
sin( )
2
che tende a
[2 cos α : 2 sin α : −2] = [cos α : sin α : −1].
Quindi f˜ è ben definita e continua.
(c) Se A = (cos α, sin α ), per quando visto sopra l’equazione della retta f˜( A, A) è
x cos α + y sin α = 1,
che è ortogonale alla direzione (cos α, sin α ) e incontra la circonferenza nel solo punto A, dato che
x cos α + y sin α = 1
⇐⇒ sin2 αx 2 + 1 + x 2 cos2 α − 2x cos α = sin2 α
x 2 + y2 = 1
cioè
x 2 − 2x cos α + cos2 α = 0.
La soluzione è unica dato che
∆ = 4 cos2 α − 4 cos2 α = 0,
ed è A dato che cos2 α + sin2 α = 1.
(d) L’immagine di f˜ in Y è l’immagine di S 1 × S 1 mediante una funzione continua. Dato che S 1 è compatto,
anche S 1 × S 1 è compatto, e quindi l’immagine di f˜ è compatto. Un compatto in uno spazio di Hausdorff è
chiuso, e perciò l’immagine è un chiuso dato che P2 (R) è Hausdorff.
///
(35) Si considerino in A2 (C) i tre punti A = (1, i ), B = (1, −i ), C = (i, −1).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
225
§ 2. SECONDA PARTE
(i) Determinare se i punti A, B e C sono allineati.
(ii) Siano r AB , r AC e r BC le tre rette per A, B, per A, C e per B, C rispettivamente. Si scrivano le equazioni
cartesiane delle tre rette.
(iii) Si consideri la funzione biunivoca f : E4 → A2 (C), definita ponendo
( x, y, u, v) 7→ ( x + iy, u + iv).
Mostrare che f −1 (r ) è un sottospazio affine (un piano) di E4 , se r è una retta di A2 (C).
(iv) Determinare l’area del triangolo con vertici f −1 A, f −1 B, f −1C.
(v) È vero che tre punti di A2 (C) sono allineati (in A2 (C)) se e soltanto se le rispettive controimmagini in
E4 mediante f sono allineate?
Sol: (a) I punti sono allineati se e solo se
i 1
1 i 1
0
−i 1 = 2i (i − 1) ̸= 0,
0 = det 1 −i 1 = det 0
i −1 1
i − 1 −1 1
e quindi non sono allineati.
(b) Utilizziamo il punto (d) del primo esercizio (nel caso complesso la dimostrazione è identica). Le
equazioni cercate sono
r AB : x − 1 = 0
r AC : (1 + i ) x − (1 − i )y
r BC : (1 − i ) x − (1 − i )y.
(c) Sia r la retta di A2 (C) di equazione az + bw + c = 0, se (z, w) sono le coordinate di A2 (C). I coefficienti
a, b, c sono complessi, e (a, b) ̸= (0, 0). La controimmagine f −1 (r ) è uguale all’insieme
{( x, y, u, v) : a( x + iy) + b(u + iv) + c = 0}.
Se a = a1 + ia2 , b = b1 + ib2 e c = c1 + ic2 , con a j , b j e c j coefficienti reali, si ha che
a( x + iy) + b(u + iv) + c = (a1 + ia2 )( x + iy) + (b1 + ib2 )(u + iv) + c1 + ic2 )
= a1 x − a2 y + b1 u − b2 v + c1 + i (a1 y + a2 x + b1 v + b2 u + c2 ) .
Quindi f −1r è l’insieme dei punti ( x, y, u, v) che soddisfano le equazioni
a1 x − a2 y + b1 u − b2 v + c1 = 0
a1 y + a2 x + b1 v + b2 u + c2 = 0,
e quindi è un sottospazio affine. Certamente ci sono soluzioni, dunque si tratta di un piano se il rango della
matrice dei coefficienti
]
[
a1 −a2 b1 −b2
a2 a1 b2 b1
è uguale a due. Se fosse uno, il determinante di tutti i minori 2 × 2 sarebbe zero, e dunque si avrebbe
]
]
[
[
b1 −b2
a1 −a2
2
2
2
= b21 + b22 = |b|2
= a1 + a2 = |a| , 0 = det
0 = det
b2 b1
a2 a1
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
226
#A. ALCUNI ESERCIZI SVOLTI
da cui segue che a = b = 0, il che contraddice l’ipotesi (a, b) ̸= (0, 0).
(d) I tre punti hanno coordinate
0
1
1
1
0
0
f −1 A = , f −1 B = , f −1C = .
0
−1
0
−1
0
1
Il triangolo è quindi definito dai due vettori
1 1 0
0 1 −1
1 0 1
0 0 0
a = − = , b = − = .
−1 0 −1
0 0 0
1
−1
2
0
−1
1
Il quadrato dell’altezza è
b2 − b̄2 ,
dove b̄ è la proiezione di b su a, cioè
b̄ =
2
b·a
a = a = (0, 0, 0, 1).
a·a
4
Quindi
b2 − b̄2 = 4 − 1 = 3.
√
1√
32 = 3. In realtà è facile vedere che si tratta di un triangolo equilatero con lato 2, anche
2
√
solo calcolando le distanze tra punti, che quindi ha area 3.
(e) I due vettori B − A, C − A sono dipendenti su C se esiste un λ ∈ C tale che B − A = λ(C − A). D’altro
canto f −1 B − f −1 A, f −1C − f −1 A sono allineati se esiste un λ ∈ R tale che f −1 B − f −1 A = λ( f −1C − f −1 A).
Quindi se sono allineati in A4 (R), allora lo sono anche in A2 (C). Viceversa, potrebbero essere allineati con
un λ ∈ C ∖ R, come per esempio i tre punti A = (0, 0), B = (1, 0) e C = (i, 0), e non esserlo i corrispondenti
punti in A4 (R), che in questo ultimo esempio sarebbero
L’area è quindi
0
0
,
0
0
1
0
,
0
0
0
1
.
0
0
///
(36) Siano A, B, C e D punti indipendenti (dal punto di vista affine) di A3 (K ), dove K è R oppure C.
(i) Mostrare che ogni sottoinsieme di 3 punti scelti tra i quattro punti A, B, C, D è indipendente (dal punto
di vista affine).
(ii) Siano πBCD , π ACD , π ABD e π ABC i piani per B, C, D, per A, C, D, per A, B, D e per A, B, C rispettivamente,
e X la loro unione X = πBCD ∪ π ACD ∪ π ABD ∪ π ABC . Determinare l’ordine del gruppo G formato da tutte
le affinità di A3 (K ) che mandano X in sé.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
227
§ 2. SECONDA PARTE
(iii) Quanti elementi di G fissano almeno uno dei 4 punti? Quanti esattamente uno?
(iv) Si determini l’insieme dei punti di A3 (K ) fissati da tutti gli elementi di G, cioè
{x ∈ A3 (K ) : ∀g ∈ G, gx = x}.
Sol: (a) Quattro punti sono indipendenti dal punto di vista affine se il piú piccolo sottospazio affine che li
contiene ha dimensione 3. Se per assurdo esistesse un sottoinsieme di tre punti non indipendenti, per esempio
A, B e C, allora A, B e C sarebbero allineati, cioè esisterebbe una retta l che li contiene. Ma data la retta l e
il punto D al di fuori da essa, esiste unico il piano che le contiene, e questo sarebbe un sottospazio affine che
contiene tutti i punti (A, B, C perché contiene tutti i punti di l, e D per costruzione).
(b) Le affinità mandano piani in piani. Sia g: A3 (K ) → A3 (K ) una affinità. Dato che A, B, C sono
indipendenti, anche le immagini gA, gB, gC sono indipendenti, e generano il piano affine π che è immagine
del piano π ABC . Se g manda X in sé, deve mandare il piano π ABC in un piano π che è tutto contenuto in
X. Ora, se il piano π è contenuto in X, allora π è uguale a uno dei quattro piani πBCD , π ACD , π ABD e π ABC .
Infatti, se per assurdo cosí non fosse, si dovrebbe avere che l’intersezione di π con ognuno dei quattro piani
ha dimensione al massimo 1, e quindi il piano π sarebbe l’unione di quattro sottospazi affini di dimensione al
piú uno, e questo è assurdo. Quindi g induce una corrisondenza biunivoca tra i quattro piani. Segue che manda
l’intersezione di due piani nell’intersezione di due piani, e l’intersezione di tre piani nell’intersezione di tre
piani. Dato che i punti A, B, C, D sono intersezioni di tre piani distinti (per esempio A = π ACD ∩ π ABD ∩ π ACD ),
g induce una permutazione tra i punti A, B, C, D. Ora, per ogni permutazione dei punti A, B, C, D esiste una
unica affinità f che induce tale permutazione, e tale f manda X in sé. Abbiamo appena mostrato che le affinità
che mandano X in sé sono in corrispondenza biunivoca con le permutazioni dei quattro punti A, B, C, D (è un
isomorfismo di gruppi, dato che la composizione di permutazioni corrisponde alla composizione di affintà),
che sono 4! = 4 · 3 · 2 = 24.
(c) Le permutazioni di quattro elementi A, B, C, D che fissano esattamente uno dei punti sono tante quante
il numero dei punti moltiplicato per le permutazioni di tre elementi che non fissano alcun punto, cioè le otto
seguenti: ACDB, ADBC, CBDA, DBAC, BDC A, DACB, BC AD, C ABD. Quelle che fissano almeno un punto
sono tutte meno quelle che non fissano nessun punto, cioè tali che gA ̸= A, gB ̸= B, gC ̸= C e gD ̸= D.
Queste sono le nove seguenti: BADC, BCDA, BDAC, C ADB, CDAB, CDBA, DABC, DC AB, DCBA. Quindi
ci sono in tutti 24 − 9 = 15 permutazioni che fissano almeno un punto. Oppure sono tutte quelle che fissano un
punto (le 8 di prima), piú quelle che ne fissano esattamente due (quelle che ne fissano tre ne fissano per forza
quattro). Quelle che ne fissano esattamente due sono tante quante i sottoinsiemi di due elementi dell’insieme
24
4!
=
= 6. Quindi in totale sono 8 + 6 + 1 = 15. Problema: quante sono in
{A, B, C, D}, cioè (24) =
2!2!
4
generale le permutazioni di n punti che non ne fissano nessuno? Quante quelle che ne fissano almeno uno?
Che ne fissano esattamente uno?
(d) L’insieme Y dei punti di A3 (K ) fissato da tutti gli elementi di G si trova come segue. Si prendano i
punti A, B, C, D come riferimento affine. Se A è l’origine, essere invariante rispetto alle permutazioni dei tre
punti B, C, D significa che le tre coordinate dei punti fissati da G in questo sistema di riferimento sono uguali,
cioè che i punti di Y stanno sulla retta che congiunge A con il baricentro di BCD. Lo stesso deve valere per ogni
altro punto, e quindi Y è contenuto nelle intersezioni delle rette che congiungono i vertici con i baricentri delle
A+ B+C +D
facce opposte: ma queste si incontrano nel baricentro di ABCD, cioè nel punto di coordinate
4
(coordinate baricentriche).
(Come nell’esercizio precedente, è possibile cercare qualcosa di computazionale per aiutarsi – un esempio
è il codice che segue)
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
228
#A. ALCUNI ESERCIZI SVOLTI
lettere=['A','B','C','D']
def permutazioni(seq) :
if len(seq) == 0 :
yield ()
else :
for i in range(0, len(seq)) :
for rest in permutazioni(seq[:i] + seq[i+1:]) :
yield (seq[i],) + rest
def fissa_almeno_uno(p):
for i in range(len(p)):
if p[i] == lettere[i]: return True
return False
def fissa_esattamente_uno(p):
numero_fissi=0
for i in range(len(p)):
if p[i] == lettere[i]: numero_fissi += 1
return numero_fissi == 1
def fissa_nessuno(p):
for i in range(len(p)):
if p[i] == lettere[i]: return False
return True
def stampa(p):
return ''.join(p)
for p in permutazioni( lettere ):
s= ''.join(p) + ": "
if fissa_almeno_uno(p): s += " *"
if fissa_esattamente_uno(p): s += "!"
if fissa_nessuno(p): s += "-"
print s
///
A proposito di componenti connesse: in posizione generale (cioè supponendo che le rette si intersechino
sempre due per volta), sia f (n) il numero di componenti connesse del complementare dell’unione di n rette
nel piano. Si ha f (1) = 2, f (2) = 4 e f (3) = 7. Si veda la figura A.1 a pagina 229. Può essere che il numero
n2 + n + 2
di componenti f (n) è uguale a
(a patto che le rette si incontrino sempre due a due)? Perché?
2
(37) Descrivere le orbite e lo spazio quoziente delle seguenti azioni di G su X (quando e se sono azioni).
(i) G = C∗ = {z ∈ C : z ̸= 0}, X = C, per g ∈ G e z ∈ X si ponga poi g · z = gz (moltiplicazione di numeri
complessi);
(ii) G = R, X = C, con prodotto t · z = et+it z per ogni t ∈ G e per ogni z ∈ X.
(iii) G = Z, X = C, con prodotto k · z = ek z per ogni k ∈ Z e per ogni z ∈ X.
(iv) G = Z, X = R, con prodotto k · x = k + x per ogni x ∈ X e k ∈ G.
(v) G = Z, X = R, con prodotto k · x = kx per ogni x ∈ X e k ∈ G.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
229
§ 2. SECONDA PARTE
Figura A.1: Il complementare dell’unione di n rette ha . . . componenti connesse.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
230
#A. ALCUNI ESERCIZI SVOLTI
Sol: (a) Se z1 e z2 sono due numeri complessi e z2 = gz1 per un g ̸= 0, g ∈ C, allora o sono entrambi
uguali a zero, oppure entrambi diversi da zero. L’orbita di 0 è chiaramente {0}. L’orbita di 1 è C ∖ {0}. Quindi
ci sono esattamente due orbite. Lo spazio quoziente X/G ha perciò due punti: [0] e [1]. La topologia di X/G:
U ⊂ X/G è aperto se e soltanto se la sua controimmagine in X = C è aperta. Sappiamo che ∅ e X/G sono
aperti, per definizione. La controimmagine di [0] è l’orbita di 0, che è {0}, che non è aperto: {[0]} non è aperto.
La controimmagine di [1] è l’orbita di 1, che è C ∖ {0} = C∗ , che è aperto in C, e quindi {[1]} è aperto in X/G.
Quindi gli aperti sono:
∅ = {}, {[1]}, {[0], [1]} = X/G.
(b) Se z = 0, l’orbita {et+it 0} è {0}. Altrimenti, se z ̸= 0, la mappa
t 7→ et+it z
è iniettiva, e descrive una spirale in C (perché?). Osserviamo che se Y ⊂ X è una orbita, allora esiste sempre
uno e un solo numero complesso di norma 1 in Y . Infatti, si ha (per z ̸= 0)
|et+it z| = et |z|,
t
−1 ⇐⇒ t = − ln |z|. Quindi le orbite sono in corrispondenza
e dunque et |z| = 1 se e soltanto
se
(
) e = |z|
1
biunivoca con i punti di S ∪ {0} ⊂ C, dove S 1 = {z ∈ C : |z| = 1}. Lo spazio quoziente contiene una
copia (omeomorfa?) di S 1 , e un punto extra (l’orbita [0]). Consideriamo un intorno U ⊂ X/G di [0]. La sua
controimmagine Ũ mediante la proiezione del quoziente è un aperto di C che contiene 0, e dunque contiene
un disco di raggio ϵ > 0. Ora, per ogni z ∈ C ∖ {0} esiste un t ∈ R tale che
|et+it z| < ϵ ,
e quindi l’intersezione di Ũ con ogni orbita è non vuota. Ma se Ũ contiene un punto di una orbita, allora
contiene anche tutta l’orbita di questo punto: segue che Ũ = C. Cioè l’unico intorno (aperto) di X/G che
contiene l’orbita [0] è tutto X/G. Segue che X/G non è Hausdorff.
(c) Le orbite di punti z ̸= 0 sono insiemi discreti di punti, che si accumulano in 0 ∈ C, allineati lungo
semirette per l’origine e per z. Invece 0 ha per orbita sé stesso. Due punti z1 e z2 , scritti in coordinate polari
z1 = r1 eiθ1 z2 = r2 eiθ2
stanno nella stessa orbita se e soltanto se
r2 e
iθ2
= e r1 e
k
iθ1
k
r2 = e r1
ln r2 = k + ln r1
⇐⇒
⇐⇒
θ2 = θ1 mod 2π.
θ2 = θ1 mod 2π.
Quindi X/G contiene una copia (perché? è copia omeomorfa?) di un toro, e la orbita [0]. Analogamente al
punto precedente, [0] ∈ X/G non ha altri intorni aperti a parte X/G.
(d) Le orbite sono traslati a coordinatre intere, il quoziente è S 1 (già visto a lezione).
(e) Non è una azione. ///
(38) Siano A = (1, 1, 1), B = (−1, −1, 1), C = (1, −1, −1) e D = (−1, 1, −1) quattro punti dello spazio
euclideo E3 .
(i) Sono indipendenti (dal punto di vista affine)?
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
231
§ 2. SECONDA PARTE
(ii) Sia G il gruppo di tutte le isometrie che mandano l’insieme dei 4 punti {A, B, C, D} in sé. Dimostrare
che G è finito.
(iii) Determinare le (24) distanze reciproche.
(iv) Calcolare il volume del tetraedro ABCD e la sua area laterale.
Sol: (a) Si ha
A − D = (2, 0, 2)
B − D = (0, −2, 2)
C − D = (2, −2, 0),
con determinante della matrice
2
2 0
det 0 −2 −2 = 16 ̸= 0,
2 2
0
dunque sono indipendenti dal punto di vista affine.
(b) Ogni isometria è in particolare una affinità. Le affinità che mandano l’insieme dei 4 punti in sé costituiscono un gruppo finito di ordine 24 = 4! (isomorfo al gruppo di permutazioni di quattro elementi – si veda
il compito del mese di giugno 2008). Quindi G è un sottogruppo di un gruppo finito, ed è a sua volta finito.
4!
= 6 distanze reciproche sono
(c) Le (24) = 2!2!
√
|A − D| = |(2, 0, 2)| = 2 2
√
|B − D| = |(0, −2, 2)| = 2 2
√
|C − D| = |(2, −2, 0)| = 2 2
√
|A − B| = 2 2
√
|B − C| = 2 2
√
|C − A| = 2 2.
Si tratta quindi di un tetraedro regolare, e quindi ogni affinità che manda l’insieme dei vertici {A, B, C, D} in
sé è anche una isometria (perché?).
(d) Il volume è
2
2 0
1
16 8
det 0 −2 −2 =
= .
6
6
3
2 2
0
√
√
L’area di una delle
√ sue facce (triangoli equilateri) è uguale a 2 3. La superficie laterale è quindi 6 3, la
superficie totale 8 3. Il baricentro della faccia ABC è
1 −1 1
1
1 1
1 + −1 + −1 = −1 ,
3 3
1
1
−1
1
quindi l’altezza del tetraedro è la norma del vettore
1 −1 4/3
1
−1 − 1 = −4/3 ,
3
−1
4/3
1
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
232
#A. ALCUNI ESERCIZI SVOLTI
√
4 3
che è uguale a
. Il volume è quindi uguale a
3
√
1 √ 4 3 8
·2 3·
= ,
3
3
3
come sopra. ///
(39) Si consideri in E2 la conica γ di equazione x 2 − y2 = 1. Sia G il gruppo di tutte le affinità che mandano
γ in sé.
(i) Determinare quali elementi di G sono anche isometrie.
(ii) G è un sottogruppo chiuso di GL(2, R)?
(iii) G è compatto?
(iv) L’azione di G su A2 (R) è transitiva? G contiene traslazioni?
(v) G è connesso?
(vi) Determinare se G agisce transitivamente su γ.
Sol: Osserviamo che i due asintoti di γ (le rette di equazioni x ± y = 0) sono le uniche rette di E2 che non
intersecano γ e che passano per i punti all’infinito di γ: infatti il sistema si riduce all’equazione
2
2
x −y = 1
=⇒ x 2 − (ax + b)2 = 1
y = ax + b.
(1 − a2 ) x 2 − 2abx + b2 − 1 = 0.
Questa, se a2 = 1, ha certamente soluzioni se b ̸= 0. Altrimenti, se b = 0, non ha soluzioni. Ora, se una affinità
manda γ in sé, allora deve mandare anche i suoi due asintoti in sé. In particolare, l’intersezione dei due asintoti
deve rimanere fissa, e quindi l’affinità si scrive come
x 7→ Ax
[
]
a b
con A =
matrice invertibile. Nel sistema di riferimento dato dai due asintoti, l’equazione di γ risulta
c d
1
st = , dove le coordinate sono
2
1
s = √ ( x + y)
][ ]
[
[]
1 1 1 x
s
2
.
=√
⇐⇒
1
1 −1 y
t
2
t = √ ( x − y)
2
Lavoriamo nelle coordinate (s, t ), invece che nelle ( x, y).
(a) Le rotazioni che mandano i due assi s e t in sé sono le quattro rotazioni di angolo 0, π/2, π e −π/2. Solo
le rotazioni di angolo 0 (l’identità) e di angolo π mandano γ in sé. Le riflessioni che mandano gli assi in sé
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
233
§ 2. SECONDA PARTE
sono le due riflessioni lungo gli assi (che però non mandano l’iperbole in sé), e le riflessioni lungo le bisettrici
(che mandano γ in sé). In totale quindi le isometrie di G sono rappresentate dalle quattro matrici
[
]
[
]
[
]
[
]
−1 0
0 1
0 −1
1 0
, −1 =
, R1 =
, R2
.
1=
0 1
0 −1
1 0
−1 0
Le prime due sono rotazioni (e quindi in SO(2)), le seconde riflessioni (con determinante −1).
(b) Il gruppo G è formato da tutte le matrici A tali che
[
]
[
]
0 1
t 0 1
A
A=
.
1 0
1 0
[
]
0 1
Si tratta quindi della controimmagine di
mediante la funzione (continua)
1 0
[
]
0 1
A 7→ A
A.
1 0
t
La controimmagine di un punto (che è chiuso) è un chiuso, e dunque G è chiuso.
Sia K ⊂ G il sottogruppo di G formato dalle isometrie di G. Ora, se A è una matrice tale che Aγ = γ, A
induce una permutazione tra i quattro quadranti del piano (s, t ) (dato che manda gli assi in sé, manda anche
il complementare degli assi in sé). Sia H ⊂ G il sottogruppo formato da tutte le affinità con determinante
1 che mandano il primo quadrante in sé. Sia K che H sono sottogruppi di G. Si ha che H ∩ K = 1. Se g è
un elemento di G, allora esiste certamente a ∈ K tale che ga ha determinante 1. Ora, ga oppure −ga hanno
entrambi determinante 1, e uno dei due manda il primo quadrante in sé. Dunque, dato che sia a che −a sono in
K, esiste un elemento k ∈ K tale che gk ∈ H. In altre parole, HK = G, cioè G è l’unione disgiunta dei laterali
di H
G = 1H ∪ −1H ∪ R1 H ∪ R2 H.
Per mostrare che G è chiuso, basta mostrare che H è chiuso.
(c) Osserviamo che G contiene tutte le matrici del tipo
[
]
t 0
,
0 1/t
con t ̸= 0 arbitrario. Il sottogruppo H di sopra (quelle che mandano il primo quadrante in sé) è formato da
quelle con t > 0. Quindi,
]
}
]
} {[
]
} {[
]
} {[
{[
0
−t
0 t
−t
0
t 0
:t>0 .
:t>0 ∪
:t>0 ∪
:t>0 ∪
G=
−1/t 0
1/t 0
0 −1/t
0 1/t
Dato che G non è limitato, non è compatto. Deduciamo anche che il determinante di ogni elemento di G è
uguale a ±1.
(d) L’azione di G su A2 (R) non può essere transitiva, dato che manda γ in sé. Dato che manda l’origine
in sé, non può contenere traslazioni, come abbiamo visto prima.
(e) G non è connesso, dato che la funzione determinate det : G → {±1} è continua e suriettiva. È possibile
(ma non facciamo ora) vedere che ha quattro componenti connesse, omeomorfe a R.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
234
#A. ALCUNI ESERCIZI SVOLTI
[
(f) L’azione è transitiva: se α ̸= 0, allora il punto (α,
[
t 0
0 1/t
1
2α )
]
t 0
viene mandato da
in
0 1/t
] α tα
1 = 1 .
2α
2tα
1
) in un qualsiasi altro punto di γ. ///
Chiaro quindi che con t ̸= 0 è possibile mandare (α, 2α
1
1
0
3
(40) In A (R) siano dati i tre punti A = 1, B = 0, C = 1.
0
1
1
(i) A B e C sono allineati? Dipendenti?
(ii) Dimostrare che esiste un unico piano π che contiene A, B e C, e scriverne una equazione.
(iii) Si trovi un riferimento affine che contiene i tre punti A, B, e C e si riscriva l’equazione del piano π in
questo riferimento.
Sol: Ricordiamo che tre punti sono allineati se e solo appartengono ad una stessa retta o, equivalentemente,
se sono dipendenti. Quindi sono allineati se e solo se i due vettori u = B − A e v = C − A generano uno
sottospazio di R3 di dimensione al più 1. Basta quindi calcolare il rango della matrice [u, v]:
(2.1)
0 −1
Rank −1 0 = 2
1
1
che è uguale a due per concludere che non sono allineati e che generano uno spazio di dimensione massima
(2).
In un altro modo è possibile procedere come segue: se fossero allineati, allora il rango della matrice [ A −
O, B − O, C − O] dovrebbe essere al più 2 (dal momento che i tre vettori sono contenuti nel piano contenente
la retta e l’origine O), e quindi il suo determinante dovrebbe essere nullo. Ma dato che
1 1 0
det 1 0 1 = −2 ̸= 0,
0 1 1
i tre punti non possono essere allineati. Notiamo che invece è possibile avere tre punti A′ ,B′ ,C ′ non allineati
tali che il determinante della matrice [ A′ − O, B′ − O, C ′ − O] è nullo (basta che il piano che li contiene passi
per l’origine O).
Esiste un unico piano π passante per tre punti indipendenti: basta osservare che il sottospazio affine generato da un insieme finito di punti è unico, e che tre punti indipendenti generano un piano (in generale, d + 1
punti sono indipendenti se e solo se generano uno spazio di dimensione d).
È richiesto di scrivere una equazione di π: la più semplice è il sistema di equazioni parametriche
x = A + s( B − A) + t (C − A),
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
235
§ 2. SECONDA PARTE
con s, t ∈ R, cioè
x 1
0
−1
y = 1 + s −1 + t 0 .
z
0
1
1
o equivalentemente
x = 1−t
y = 1−s
z = s + t.
Eliminando i parametri s e t si ottiene l’equazione cartesiana
x + y + z = 2.
Ora ricordiamo cosa è un riferimento affine per uno spazio affine X di dimensione d: equivalentemente,
→
−
d + 1 punti in X indipendenti oppure un punto x0 ∈ X e d vettori di X indipendenti. Nel nostro caso X =
A3 (R), quindi un riferimento affine consiste di 4 punti oppure un punto e tre vettori di R3 . Dal momento che
il riferimento affine deve contenere i tre punti A, B, C, non può che essere quindi pensato come un insieme di
quattro punti che contenga i punti A, B e C. Osserviamo che A, B e C sono indipendenti, per cui per ottenere
un riferimento affine basta aggiungere un quarto punto O non contenuto nel piano generato da A, B e C. Dato
che l’origine non appartiene a π, si può considerare il riferimento affine {O, A, B, C}. I punti A, B e C in questo
riferimento hanno coordinate affini
1 0 0
0 , 1 , 0 ,
0 0 1
ed è chiaro quindi che il piano π ha equazione
x ′ + y′ + z′ = 1,
dove x ′ , y′ , z′ sono le coordinate affini nel nuovo sistema di riferimento. ///
(41) Si dimostri che se r e s sono due rette distinte passanti per l’origine di R2 (cioè r e s sono due
sottospazi vettoriali di dimensione 1 dello spazio vettoriale R2 ) allora R2 = r + s.
Sol: Dato che r ⊂ R2 e s ⊂ R2 , si ha r + s ⊂ R2 . Bisogna quindi mostrare che ogni vettore di R2 si può
scrivere come somma di due vettori vr e vs tali che vr ∈ r e vs ∈ s. Supponiamo invece per assurdo che r + s
sia un sottospazio vettoriale proprio di R2 (dal momento che la somma di sottospazi vettoriali è un sottospazio
vettoriale). Non può avere dimensione 0 (dato che contiene r e s), e non può avere dimensione 2 (dato che esiste
un solo sottospazio vettoriale di R2 di dimensione 2), per cui deve avere dimensione 1. Ma questo implica che
r = r + s (dato che r è sottospazio di r + s ed hanno la medesima dimensione) e analogamente s = r + s, cioè
che r = s. Ma questo contraddice l’ipotesi. ///
(42) Siano r e s la due rette dello spazio affine A3 (R) di equazioni
x 1
0
x 1
1
y = 0 + t 1 e y = 1 + s 0
z
1
0
z
1
1
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
236
#A. ALCUNI ESERCIZI SVOLTI
(i) Sono parallele? Sghembe? Incidenti?
(ii) Qual è il più piccolo sottospazio affine che contiene sia r che s (scriverne l’equazione, se esiste).
Sol: Le due rette sono parallele se e soltanto se le loro giaciture coincidono, cioè se e soltanto se i vettori
0 1
1 e 0 sono linearmente dipendenti. Il rango della matrice è 2, per cui le rette non sono parallele.
0
1
Le due rette sono sghembe quindi se e soltanto se non sono incidenti: determiniamo quindi se esistono
soluzioni in s e t del sistema di equazioni
1
0 1
1
0
1
1
+
t
=
+
s
0 ,
1
0
1
1
che si può riscrivere come
1 = 1+s
t=1
1 = 1 + s.
È chiaro che (s, t ) = (0, 1) è una soluzione, e dunque le due rette sono incidenti (si incontrano nel punto
1
A = 1). Se B e C denotano due punti distinti da A appartenenti rispettivamente alla prima e alla seconda
1
0
1
delle rette (per esempio, per t = 0 si ha B = 0 e per s = −1 si ha C = 1), allora il piano generato da A, B e
1
0
C contiene le due rette, ed è il più piccolo sottospazio affine con questa proprietà (perché …).
L’equazione parametrica di un piano per tre punti si ottiene come nel primo esercizio. ///
1 1 0 1
(43) Si considerino i punti 1, 0, 1 e 1 di A3 (R). Sono indipendenti (come punti dello spazio affine)?
1
0 1 1
3
I corrispondenti vettori di R sono indipendenti? Possono essere scelti come riferimento affine?
Sol: Osserviamo che le differenze
1
0 0 1
0 1 1
1 1
1 − 1 = − 0 , 0 − 1 = − 1 , 1 − 1 = − 0
1
0
0
1
0 1
1
1 1
sono di certo linearmente indipendenti (sono gli opposti dei vettori della base canonica di R3 ), e quindi i
quattro punti sono indipendenti e possono essere scelti come riferimento affine di A3 (R). I corrispondenti
1 0
vettori 1 − 0, …non possono esserlo, dato che in R3 il numero massimo di vettori linearmente indipendenti
0
0
è 3. ///
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
237
§ 2. SECONDA PARTE
(44) Sia Γ la conica affine piana di equazione x 2 + y2 = 1 e T : A2 (R) → A2 (R) la trasformazione affine
definita da
[ ] [
][ ] [ ]
x
1 1 x
1
T
=
+
.
y
−1 1 y
−1
Determinare l’equazione della conica T (Γ) ⊂ A2 (R).
Sol: Siano ( x, y) le coordinate affini di A2 (R), e siano ( X, Y ) le coordinate affini della seconda copia di
2
A (R) indotte dalla trasformazione T . La trasformazione T può essere scritta in coordinate come
[ ]
[ ] [
][ ] [ ]
X
x
1 1 x
1
=T
=
+
,
Y
y
−1 1 y
−1
o anche
X = x + y + 1
Y = −x + y − 1.
Calcolando T −1 si ottiene
X +Y
x = 2
X −Y −2
y =
.
2
Sostituendo nell’equazione x 2 + y2 = 1 si ottiene
( X + Y )2 ( X − Y − 2)2
+
= 1,
4
4
e semplificando
X 2 + Y 2 − 2X + 2Y = 0.
Un altro modo è il seguente: la conica, se si suppone A2 (R) dotato della metrica euclidea standard, è la
circonferenza di raggio unitario e centro nell’origine. La trasformazione T è uguale
[ alla
] composizione di una
√
1
rotazione di angolo π/4, una dilatazione di fattore 2 e una traslazione di vettore
. La rotazione lascia la
−1
[ ]
√
0
circonferenza invariata, la dilatazione ne cambia il raggio (da 1 a 2) e la traslazione sposta il centro da
a
0
[ ]
[ ]
√
1
1
. Quindi T (Γ) è la circonferenza di A2 (R) di centro
e raggio 2, che ha equazione
−1
−1
( X − 1)2 + (Y + 1)2 = 2.
Semplificando si ottiene
X 2 − 2X + 1 + Y 2 + 2Y + 1 = 2,
cioè l’equazione sopra riportata. ///
(45) Sia in A2 (R) data la retta r di
[ ]equazione x + y = 1. Scrivere (nelle coordinate ( x, y) del piano affine)
0
e la corrispondente riflessione.
la proiezione su r parallela al vettore
1
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
238
#A. ALCUNI ESERCIZI SVOLTI
[ ]
0
Sol: Sia ( x0 , y0 ) un punto di
La retta parallela a
e passante per ( x0 , y0 ) ha equazione x = x0 .
1
La sua intersezione con la retta r si ottiene risolvendo il sistema
x = x0
x + y = 1,
A2 ( R ) .
ed è quindi il punto di coordinate ( x0 , 1 − x0 ). Ne segue che se pr indica la proiezione cercata essa sarà definita
da
([ ]) [
]
x
x
=
.
pr
y
1−x
La riflessione corrispondente R : A2 (R) → A2 (R) si ottiene ricordando che deve essere
([ ])
([ ])
([ ]) [ ]
x
x
x
x
R
− pr
= pr
−
,
y
y
y
y
e dunque
]
([ ])
[
] [ ] [
x
x
x
.
R
=2
− x, y =
2 − 2x − y
y
1−x
///
(46) Si calcoli la distanza dall’origine (in E3 con il prodotto scalare standard) delle rette r e s di equazioni
x 0
1
x 0
1
y = 0 + t 1 e y = 1 + s 0
z
1
0
z
0
1
Qual è la distanza tra le due rette?
Sol: La distanza di un punto da un sottospazio è la minima delle distanze tra il punto e i punti del sottospazio.
È chiaro che il minimo delle distanze si ottiene considerando il minimo delle distanze al quadrato (perché?).
Per la prima retta si ha
x 2 + y2 + z2 = t 2 + t 2 + 1 = 2t 2 + 1,
che ha minimo per t = 0. Dato che la seconda retta si ottiene ruotando la prima attorno all’asse di rotazione
1
1 di un angolo di 2π/3 (perché?), la distanza è uguale 1 anche per essa.
1
La distanza al quadrato tra il punto A(t ) con parametro t della retta r e il punto B(s) con parametro s della
seconda retta (con abuso di notazione è stata chiamata s) è uguale a
(t − s )2 + (t − 1)2 + (1 − s )2 .
Deve essere che il vettore A(t ) − B(s) sia ortogonale sia a r che a s, cioè
t − s 1
⟨ t − 1 , 1⟩ = 0
1−s 0
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
239
§ 2. SECONDA PARTE
t − s 1
⟨ t − 1 , 0⟩ = 0.
1−s 1
Il sistema di equazioni in (s, t ) da risolvere può essere scritto come
t − s + t − 1 = 0 =⇒ s = 2t − 1
t − s + 1 − s = 0 =⇒ t = 2s − 1,
√
ed ha soluzione s = t = 1: il che implica che la distanza non è 2, ma 0 (le rette sono incidenti). ///
(47) Nel piano proiettivo si considerino i tre punti A = [1 : 0 : 1], B = [1 : 1 : 0] e C = [0 : 1 : 1]; siano
r AB , r AC e r BC le tre rette passanti per due dei tre punti. Dimostrare che il complementare
P2 (R) ∖ (r AB ∪ r AC ∪ r BC )
(cioè il piano proiettivo meno le tre rette) ha quattro componenti connesse. Quante componenti ha il piano
proiettivo meno tre rette distinte passanti per un punto?
Sol: A meno di un cambio di coordinate possiamo supporre che r BC sia la retta dei punti impropri. Quindi
il complementare P2 (R) ∖ (r AB ∪ r AC ∪ r BC ) risulta omeomorfo a
A2 (R) ∖ (rˆAB ∪ rˆAC ) ,
dove rˆAB e rˆAC denotano le tracce affini delle due rette proiettive r AB e r AC . Le due rette affini si intersecano nel
punto affine A (per definizione) e non sono parallele (dal momento che le loro intersezioni con la retta impropria
sono due punti distinti: B e C, entrambi punti di r BC ). A meno di trasformazioni affini si può supporre che r AB e
r AC siano i due assi di un sistema di riferimento cartesiano ( x, y). Le componenti connesse sono quindi 4. Infatti,
consideriamo lo spazio topologico S = {+, −} con topologia discreta, e la mappa s : R2 ∖ xy = 0 → S × S
definita ponendo s( x, y) = (Segno( x ), Segno(y)). Dal momento che s risulta una funzione continua (perché?),
lo spazio in questione ha almeno quattro componenti connesse. Per concludere che sono esattamente quattro
basta mostrare che i quadranti sono connessi, ma questo segue facilmente dal fatto che sono connessi per archi
(anche, sono connessi per archi rettilinei!).
Per quanto riguarda il piano proiettivo meno tre rette per un punto, si prosegue come sopra, ma ottenendo
due rette affini distinte con il medesimo punto all’infinito (e quindi parallele). Le componenti connesse sono
quindi 3. ///
§ 3.
ALCUNI ŒRRORI
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
240
#A. ALCUNI ESERCIZI SVOLTI
[[url:http://xkcd.com/217/]]
(48) Consideriamo il seguente sottoinsieme di R2 (con la topologia euclidea):
X = {( x, y) ∈ R2 : xy ̸∈ Z}.
(i) È aperto? È chiuso?
(ii) Consideriamo l’iperbole C di equazione x 2 − y2 = 1. L’intersezione X ∩ C è aperta nella topologia di
C? È chiusa nella topologia di C? E nella topologia di R2 ?
(iii) X e X ∩ C sono compatti? sono connessi?
(iv) Si consideri la funzione φ : Z × X → R2 definita ponendo
φ(k, ( x, y)) = (2k x, 2k y).
È vero che l’immagine di φ è contenuta in X?
Soluzioni:
a) [...] L’insieme X è infatti composto da
X = R2 ∖ (Z × Z) ∪ {( x, y) ∈ R2 : x, y ∈ Q, e xy ∈ Z},
quindi X = R2 ∖ una infinità numerabile di punti. Dato che tra un numero razionale ed uno irrazionale ∃
infiniti n° reali, segue che ∃ infinite coppie di numeri ( x3 , y3 ) con x3 , y3 ∈ R. Questo vale per ogni coppia
( x, y) ∈ R2 e quindi a maggior ragione in ogni coppia ( x, y) ∈ R2 ∖ una infinità numerabile di punti.
[...] X non è aperto, per x ∈ R ∃y ∈ R tale che xy ∈ Z (un numero per il reciproco).
[...] X è aperto perché è l’unione di tutte le palle aperte di raggio 1 e centro in ( x, y) ∈ R2 tali che x ∈ Z,
y ∈ Z.
[...] Un insieme è aperto ⇐⇒ il suo complementare è chiuso o equivalentemente se non contiene tutti i
suoi punti di accumulazione.
[...] X è un sottoinsieme chiuso di R2 . Infatti X c = {( x, y) ∈ R2 : xy ∈ Z} = Z2 . Z2 è composto da punti
isolati, ed è quindi un insieme aperto.
[...] X non contiene (0, 0), allora X ̸= R2 ma anche il suo complementare non contiene (0, 0). quindi y
(X?) non è chiuso.
[...] X = f −1 (R − Z) =⇒ la controimmagine tramite la f continua di un chiuso è un chiuso.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
241
§ 3. ALCUNI ŒRRORI
b) [...] C non è connesso perché la sua immagine attraverso una funzione continua è {1} che non è connesso.
[...] C ∩ X è aperto; poiché è aperto non può essere anche chiuso poiché C ∩ X non è connesso.
[...] la controimmagine di uno SCONNESSO è SCONNESSA (se f è continua)
[...] X ∩ C è l’intersezione di 2 insiemi non limitati X ∩ C è non limitato X ∩ C è non compatto
(49) Dimostrare che:
(i) S 1 non è omeomorfo ad un intervallo.
(ii) Gli intervalli (0, 1) e [0, 1] non sono omeomorfi.
(iii) Se uno spazio topologico X è connesso e X = A ∪ B con A ̸= ∅ e B ̸= ∅, allora o A ∩ B ̸= ∅ oppure
B ∩ A ̸= ∅.
(iv) Se X ⊂ R non è un intervallo, allora non è connesso.
Soluzioni:
a) [...] S 1 è compatto =⇒ è omeomorfo a un intervallo chiuso e non a un intervallo aperto.
[...] S 1 non è omeomorfo a un intervallo; S 1 = {( x, y) ∈ R2 : x 2 + y2 ≤ 1}. Sappiamo che I ∼ C =
circonferenza con C = {( x, y) ∈ R2 : x 2 + y2 = 1}. C ⊂ S 1 e C ̸∼ S 1 =⇒ I ̸∼ S 1 .
[...] Supponiamo per assurdo S 1 ≈ I Allora esisterebbe f : S 1 → I biunivoca, continua t.c. f −1 continua.
Ma applicando f a S 1 si perde l’iniettività della funzione, il che è assurdo. Allora S 1 ̸≈ I.
[...] Sia f : [0, 1] → S 1 f (ϑ ) = e2πiϑ ∈ S 1 f ({0, 1}) = (1, 0) ∈ S 1 f è continua {0, 1} non connesso,
(1, 0) ∈ S 1 connesso =⇒ S 1 e [0, 1] non possono essere omeomorfi.
[...] S 1 ≈ [0, 1] infatti f : [0, 1] → S 1 t.c. f (t ) 7→ ei2πt = (cos 2πt, sin 2πt ) f è continua, f (1) = (1, 0) è
1
.
iniettiva [...] è suriettiva e f −1 è continua infatti ∃ f −1 : S 1 → [0, 1] t.c. f (y) = loge (y) ·
2iπ
b) [...] non ∃ una funzione biunivoca continua [0, 1] → (0, 1) prendiamo f : (0, 1) → [0, 1] tale che
x 7→ y = x vediamo subito che non è iniettiva in quanto y = 1, y = 0 non hanno controimmagine tramite f
[...] se per assurdo ∃ f : (0, 1) → [0, 1] t.c. f omeomorfismo, significherebbe che f è biunivoca, continua,
con inversa continua. In particolare, si avrebbe che f −1 (0) = 0, f −1 (1) = 1. Ma {0} ̸∈ (0, 1) e {1} ̸∈ (0, 1),
quindi siamo giunti ad un assurdo. Questo dimostra che (0, 1) e [0, 1] non sono omeomorfi.
[...] l’immagine di un aperto attraverso una funz. continua è aperto, invece [0, 1] è chiuso.
[...] X = (0, 1) ≈ [0, 1] = Y =⇒ esisterebbe una funzione continua e biunivoca da (0, 1) a [0, 1] =⇒
f ( X ) = Y e dato che è continua la controimmagine di [0, 1] essendo chiuso dovrebbe essere un chiuso essendo
f continua ma f −1 (Y ) = X è aperto =⇒ assurdo (0, 1) ̸≈ [0, 1]
c) [...] X = A ∪ B è connesso A ̸= ∅, B ̸= ∅ poiché X è connesso, esso non può essere unione di due aperti
non vuoti disgiunti (o rispettivamente chiusi) quindi se A, B sono aperti → A ∩ B ̸= ∅ per definizione =⇒
allora anche Ā ∩ B e B̄ ∩ A sono ̸= ∅ se A è aperto e B è chiuso (o viceversa) per forza B = X ∖ A e X = A ⊕ B
poiché X = A ∪ B =⇒ quindi Ā ∩ B ̸= ∅ (o B̄ ∩ A ̸= ∅ se B aperto e A chiuso)
d) [...] Se X ⊂ R non è un intervallo allora non è connesso se X non è un intervallo =⇒ presi a, b ∈ X
∃s ̸∈ X t.c. a < s < b possiamo quindi supporre X = (a, b) ∖ {s} =⇒ X risulta essere l’unione disgiunta di
due aperti: (a, s), (s, b) ossia X = (a, s) ∪ (s, b) =⇒ X non è connesso per definizione.
[...] Se X ⊂ R non è un intervallo, o è l’insieme vuoto, o è un insieme di punti isolati, o è un’unione
disgiunta di intervalli. In tutti e tre i casi siamo di fronte a esempi di insiemi non connessi.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
242
#A. ALCUNI ESERCIZI SVOLTI
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
Appendice B
TEMI D’ESAME
Questi alcuni temi d’esame per il corso di Geometria 1, per il Corso di Laurea in Matematica dell’Università di Milano-Bicocca.
§ 4.
A.A. 2012-13
SCRITTO #1 - 2012-06-19 (14:30-16:30, U9-05)
(1) [6u] Sia K un campo finito, e sia X = An (K ), n > 0. Dati due punti
x = ( x1 , . . . , xn ),
y = (y1 , . . . , yn )
di X, si denoti con
d ( x, y) = ♯{i | xi ̸= yi }
il numero di indici i, 1 ≤ i ≤ n tali che xi ̸= yi .
(i) Dimostrare che d è una distanza.
(ii) Determinare se ( X, d ) è uno spazio metrico completo, e se è compatto.
(iii) Sia G il gruppo delle permutazioni di n elementi, con la topologia discreta. Dimostrare che l’applicazione
G × X → X,
(σ, x ) → ( xσ−1 (1) , . . . , xσ−1 (n) )
è un’azione, e che G agisce come un gruppo di isometrie.
(iv) Determinare se la topologia del quoziente X/G è metrizzabile.
(v) Mostrare che le traslazioni sono isometrie, e per n = 1, 2, determinare se esistono affinità di X = An (K )
in sé che non siano isometrie.
243
244
#B. TEMI D’ESAME
(vi) Mostrare che se f : X → X è una affinità tale che f (O) = O che sia anche una isometria, allora esiste
una permutazione σ ∈ G tale che per ogni i ∈ {1, . . . , n} si ha f ( ei ) = ai eσ (i ) per certi ai ∈ K ∗ , dove gli
ei sono i vettori della base canonica di K n .
(2) [4u] Sia I 3 il cubo I 3 ⊂ E3 definito da I 3 = [0, 1] × [0, 1] × [0, 1].
(i) Si mostri che il volume del tetraedro T 0 ⊂ I 3 con vertici
(0, 0, 0), (1, 0, 0), (0, 1, 0), (0, 0, 1)
e quello del tetraedro T 1 ⊂ I 3 con vertici
(0, 0, 0), (0, 0, 1), (0, 1, 1), (1, 1, 1)
coincidono.
(ii) Si mostri che il gruppo simmetrico Σ3 (di ordine 6) delle permutazioni di tre elementi agisce su I 3
permutando le coordinate, e che
∪
I3 =
gT 1 .
g∈Σ3
(iii)
Si deduca che il volume di T 0 e T 1 è uguale a 16 .
Sia ρ l’isometria ( x, y, z ) 7→ (−y, −z, −x ) di E3 . È una rotazione? Si mostri che genera un gruppo ciclico
G di ordine 6.
(iv) Si determini per quale valore φ ∈ R, φ > 0, le G-orbite dei due punti (1, φ, 0), (1, −φ, 0) di E3 sono
vertici di un icosaedro regolare. (suggerimento: per quale valore di φ i tre punti (1, φ, 0), (1, −φ, 0) e
(φ, 0, 1) sono equidistanti? Si guardi la figura, in cui l’icosaedro è inscritto nel cubo [−1, 1]3 ).
(3) [4u] Si consideri in P2 (C) (con coordinate [ x : y : u]) il gruppo G di tutte le proiettività che mandano
la retta u = 0 (retta impropria) in sé.
(i) Mostrare che per ogni coppia di punti distinti A, B nella retta u = 0, esiste almeno una proiettività in G
che manda [1 : 0 : 0] e [0 : 1 : 0] in A e B.
(ii) La proiettività del punto precedente è unica?
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
245
§ 4. A.A. 2012-13
(iii) Descrivere il sottogruppo di G formato dalle proiettività che fissano ogni punto della retta impropria
u = 0. Agisce in modo transitivo sulla carta affine {u ̸= 0} ⊂ P2 (C)?
(iv) Scrivere le equazioni omogenee di tutte le possibili coppie di rette r1 e r2 i cui punti all’infinito siano
rispettivamente [1 : 0 : 0] e [0 : 1 : 0], e tali che r1 ∩ r2 ∈ {x = y} ⊂ P2 (C).
SCRITTO #2 - 2012-07-03 (14:30-16:30, U1-10)
(4) [6u] Per ogni n ∈ N, n > 0, sia Xn = {z ∈ C : zn = 1} ⊂ S 1 l’insieme delle radici n-esime dell’unità, e
X=
∞
∪
Xn
n=1
la loro unione, con la topologia metrica di C. Dimostrare i seguenti fatti.
(i) La chiusura di X in C è uguale a S 1 : X = S 1 .
(ii) X non è connesso.
(iii) X non è compatto.
(iv) Esiste una successione {z j } di punti di X che non ammette sottosuccessioni convergenti ad alcun elemento
di X.
(v) Non esiste una successione {z j } di punti di X che non ammette sottosuccessioni convergenti ad alcun
elemento di S 1 ⊂ C.
(vi) Se f1 , f2 : S 1 → R sono due funzioni continue tali che ∀x ∈ X, f1 ( x ) = f2 ( x ), allora ∀x ∈ S 1 , f1 ( x ) =
f 2 ( x ).
(5) [4u] Posto X = R3 \ {0}, G = R∗ , si consideri l’applicazione
ρ : G × X → X,
ρ(λ, ( x0 , x1 , x2 )) = (λx0 , λ2 x1 , λ3 x2 ).
(i) Dimostrare che ρ è un’azione.
(ii) Determinare se il quoziente X/G è compatto, e se è connesso.
(iii) Si considerino le applicazioni ϕ0 , ϕ1 , ϕ2 : R2 → X/G
ϕ0 (z, w) = [(1, z, w)],
ϕ1 (z, w) = [(z, 1, w)],
ϕ2 (z, w) = [(z, w, 1)].
Si dimostri che ϕ0 , ϕ1 , ϕ2 sono continue e aperte. Sono omeomorfismi con l’immagine?
(iv) Determinare se X/G è di Hausdorff.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
246
#B. TEMI D’ESAME
(6) [5u] Siano A, B e C tre punti non allineati di un piano affine A2 (K) su campo finito K, e P AB , P BC e
PC A tre punti allineati rispettivamente con AB, BC e C A. Si supponga anche che P AB ̸∈ {A, B}, P BC ̸∈ {B, C},
PC A ̸∈ {C, A}.
(i) Dimostrare che esiste un riferimento affine in A2 (K) per cui A = (0, 0), B = (1, 0) e C = (0, 1), e che
esistono ρ A, ρB , ρC ∈ K∗ , tali che
(P AB − A) = ρC ( B − P AB )
(P BC − B) = ρ A (C − P BC )
(PC A − C ) = ρB ( A − PC A ) .
(ii) Dimostrare che A ̸= P BC , B ̸= PC A, C ̸= P AB , e quindi esistono uniche tre rette a per A e P BC , b per B e
PC A, c per C e P AB .
(iii) Mostrare che
A1 B1 P1
A1 C1 P1
2
A
B
P
A
C
P
a=
P
∈
A
(
K
)
:
det
+
ρ
det
=
0
.
2
2
2
2
2
2
A
1 1 1
1 1 1
Scrivere le analoghe equazioni per b e c.
(iv) Mostrare che se a ∩ b ∩ c ̸= ∅, allora ρ AρB ρC = 1.
(v) Viceversa, mostrare che se ρ AρB ρC = 1, allora a ∩ b ∩ c ̸= ∅.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
247
§ 4. A.A. 2012-13
SCRITTO #3 - 2012-07-17 (14:30-16:30, U9-04)
(7) [8u] Si dice che uno spazio topologico X è irriducibile se per ogni coppia di chiusi F, G con X = F ∪ G
vale X = F o X = G. Si dice che un sottospazio A ⊂ X è irriducibile se lo è nella topologia indotta.
(i) Dimostrare che se X è irriducibile e A ⊂ X è aperto, allora A è irriducibile.
(ii) Dato uno spazio topologico X, si consideri la famiglia
FX = {F ⊂ X chiuso |̸ ∃F1 , . . . , Fk chiusi irriducibili di X, F = F1 ∪ · · · ∪ Fk }
dei sottoinsiemi chiusi di X che non si possono scrivere come unione finita di chiusi irriducibili. Dimostrare che FX non contiene alcun elemento minimale Y , cioè tale che A ∈ FX ∧ A ⊂ Y =⇒ A =
Y.
(iii) Sia X uno spazio topologico con la proprietà che per ogni catena discendente di chiusi F1 ⊃ F2 ⊃
. . . Fn ⊃ . . . esiste N tale che Fn = F N per n ≥ N. Dimostrare che FX è vuoto.
(iv) Sia X uno spazio topologico con la proprietà che ogni suo sottospazio è compatto. Dimostrare che X è
unione di un numero finito di chiusi irriducibili.
(8) [4u] Sia G ⊂ SO(2) un sottogruppo finito. Sia p : R → SO(2) la funzione definita da
[
]
cos t − sin t
p(t ) =
sin t cos t
(i) Mostrare che G̃ = p−1 (G ) ⊂ R è un sottogruppo additivo discreto di R.
(ii) Si mostri che p induce un omeomorfismo tra i due spazi quozienti R/G̃ ≈ SO(2)/G.
(iii) Si dimostri che G non può agire in modo transitivo su SO(2).
(iv) Mostrare che per ogni G di ordine l > 1 si ha G ∼
= Zl = {z ∈ C∗ : zl = 1} ⊂ C∗ .
(9) [6u] Sia X = P2 (C) il piano proiettivo complesso, con coordinate omogenee [ x : y : u], e retta
impropria u = 0. Dimostrare i seguenti fatti.
(i) Ogni retta di X diversa dalla retta impropria ha uno e un solo punto all’infinito.
(ii) Il punto [1 : 1 : 1] non è allineato a nessuna coppia di punti scelti tra [1 : 0 : 0], [0 : 1 : 0] e [0 : 0 : 1].
(iii) Una proiettività f : X → X manda terne di punti allineati in terne di punti allineati, e terne di punti non
allineati in terne di punti non allineati.
(iv) Per ogni scelta di tre punti A, B, C ∈ X non allineati, esiste almeno una proiettività f : X → X tale che
f ([1 : 0 : 0]) = A, f ([0 : 1 : 0]) = B, f ([0 : 0 : 1]) = C.
(v) Fissati A, B, C non allineati, sia F l’insieme formato da di tutte e sole le proiettività f : X → X che
mandano [1 : 0 : 0], [0 : 1 : 0], [0 : 0 : 1] in A, B, C rispettivamente. L’insieme
{
}
T = f ([1 : 1 : 1]) : f ∈ F ⊂ X
è uguale all’insieme dei punti P ∈ X che non sono allineati a due dei tre punti A, B, C, comunque presi.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
248
#B. TEMI D’ESAME
(vi) Nella topologia indotta dalla topologia quoziente di X, T è omeomorfo a (C ∖ {0}) × (C ∖ {0}), ed è
connesso.
SCRITTO #4 - 2012-09-18 (14:30-16:30, U1-10)
(10) [6u] Si consideri la topologia euclidea standard su Q. Per ogni x ∈ Q si indichi con Z x l’insieme
definito da
Z x = {kx : k ∈ Z ∖ {0}} ⊂ Q .
(i) Determinare per quali x ∈ Q risulta che Z x è chiuso in Q.
(ii) Per quali x ∈ Q risulta che Z x è compatto? Per quali risulta connesso?
(iii) Dimostrare che per ogni x ∈ Q l’insieme Z x ∩ N è chiuso in Q, e che il suo estremo inferiore è un
elemento di Z x . Chiamiamo tale estremo inferiore b( x ).
(iv) Si consideri la funzione f : Q → Q definita da
1
, se x =
̸ 0;
1
b( )
f (x) =
x
0,
se x = 0 .
Mostrare che la funzione f è ben definita.
(v) Mostrare che f è continua in 0.
(vi) Esiste x0 ∈ Q, x0 ̸= 0, tale che la funzione f è continua in x0 ?
(11) [6u] Sia X = P2 (C) e si consideri la mappa
ρ : R × X → X,
ρ(t, [ x : y : u]) = [eit x : y : u].
(i) Dimostrare che ρ definisce un’azione di R su X.
(ii) Deteminare lo stabilizzatore di ogni punto di X.
(iii) Determinare se lo spazio quoziente X/R è compatto e se è connesso.
(iv) Determinare se lo spazio quoziente X/R è di Hausdorff.
(12) [6u] Sia γ ⊂ E2 una circonferenza nel piano euclideo E2 , con centro A e raggio r. Per ogni P ∈ E2 si
definisca la quantità
w(P; γ ) = ∥P − A∥2 − r 2 .
(i) Mostrare che se P è un punto esterno alla circonferenza γ, allora w(P; γ ) è il quadrato della distanza tra
P ed i due punti in cui le due tangenti a γ passanti per P toccano γ.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
249
§ 4. A.A. 2012-13
(ii) Date due circonferenze distinte γ e Γ in E2 , dimostrare che il luogo dei punti
R(γ, Γ) = {P ∈ E2 : w(P; γ ) = w(P; Γ)}
è una retta se γ e Γ hanno centri distinti, ed è vuoto se esse sono concentriche.
(iii) Mostrare che se A e B sono i centri di γ e Γ, e se A ̸= B, allora R(γ, Γ) è ortogonale alla retta passante
per A e B.
(iv) Mostrare che
γ ∩ Γ ⊂ R(γ, Γ).
(v) Mostrare che se A, B e C sono tre punti non allineati in E2 , e γ A, γB e γC tre circonferenze con centri
rispettivamente in A, B e C, allora esiste un unico punto Q ∈ E2 tale che
Q ∈ R(γ A, γB ) ∩ R(γB , γC ) ∩ R(γC , γ A ) .
(vi) Dedurre dai punti precedenti che se tre circonferenze sono mutuamente tangenti e con centri non allineati,
allora le tre tangenti comuni si incontrano in un punto.
SCRITTO #5 - 2013-02-19 (14:30-16:30, U9-09)
(13) [6u] Sia X ⊂ E2 la scala infinita
X = {( x, y) ∈ E2 : ( x ∈ [0, 1] ∧ y ∈ Z) ∨ ( x ∈ {0, 1})},
e g: E2 → E2 l’isometria definita da
g: ( x, y) 7→ (1 − x, y + 3).
(i) Mostrare che g( X ) = X.
(ii) Sia G il gruppo generato da g, cioè G = {gk : k ∈ Z}. Mostrare che G agisce su X mediante isometrie.
(iii) Mostrare che l’azione di G su X è libera.
(iv) Si consideri lo spazio topologico quoziente X/G: dimostrare che è compatto e connesso.
(v) Si dia una descrizione (anche grafica) del quoziente X/G. È possibile disegnarlo su un piano?
(14) [6u] Sia G l’insieme di tutte le trasformazioni affini g: R → R che si scrivono come g( x ) = ax + b,
con a > 0.
(i) Mostrare che G è un gruppo, rispetto alla composizione di funzioni.
(ii) Mostrare che la funzione Φ : (0, +∞) × R → G definita da (a, b) 7→ Φ((a, b)) = ( x 7→ ax + b) ∈ G è
una bijezione.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
250
#B. TEMI D’ESAME
(iii) Per ogni z ∈ R e ogni intervallo aperto U ⊂ R si indichi con W (z, U ) ⊂ G l’insieme
W (z, U ) = {g ∈ G : g(z ) ∈ U}.
Cos’è Φ−1 (W (z, U ))? Mostrare che la famiglia di tutti i W (z, U ), al variare di z e U, non è una base per
una topologia di G (sotto quali condizioni W (z, U ) ⊂ W (w, V )? )
(iv) Mostrare che la famiglia W formata da tutte le intersezioni finite W (z1 , U1 ) ∩ W (z2 , U2 ) ∩ . . . ∩ W (zn , Un ),
al variare di zi ∈ R e Ui ⊂ R aperti, con i = 1, . . . , n, è una base per una topologia τ di G.
(v) Dimostrare che G, con la topologia τ, è uno spazio topologico di Hausdorff.
(15) [6u] Sia K un campo, e E un piano affine su campo K. Se OXY è un riferimento affine di E, per ogni
ax bx cx
terna ordinata A, B, C di punti di E si indichi con ( ABC )OXY il determinante della matrice ay by cy i cui
1 1 1
coefficienti ax , ay , bx , by , cx , cy sono le coordinate (rispettivamente) di A, B, C nel riferimento OXY .
AC
−−→ −−→
Ricordiamo che per tre punti allineati (con A ̸= B) si indica anche con
il rapporto AC : AB, cioè
AB
AC C A
CA
AC
−−→
−−→
l’unico ρ ∈ K tale che AC = ρ AB; si ponga per semplicità
=
=−
=−
.
BA AB
BA
AB
(i) Si mostri che tre punti A, B, C ∈ E sono allineati se e soltanto se ( ABC )OXY = 0 in un qualsiasi sistema
di riferimento OXY .
( ABC )OXY
(ii) Si mostri che, date due terne ordinate A, B, C e A′ , B′ , C ′ di punti di E, il rapporto ′ ′ ′
non
( A B C )OXY
dipende dal sistema di riferimento OXY . In questo caso quindi si può omettere di scrivere OXY nell’espressione del rapporto.
(iii) (Teorema del lato comune) Si mostri che se A, B, P, Q ∈ E sono quattro punti, con A ̸= B e P ̸= Q tali
che la retta AB e la retta PQ si intersecano in un unico punto M, allora
( ABP ) MP
.
=
( ABQ) MQ
Quando succede che M = Q oppure M = P la formula è valida?
(iv) Siano A, B, C tre punti non allineati nel piano affine E, e P, Q e R tre punti rispettivamente sulle rette
AB, BC e C A. Mostrare che se P, Q, R sono allineati, per ogni coppia X, Y di punti distinti allineati con
P, Q, R si ha
( XY A) PA
( XY B) QB
( XYC ) RC
=
=
=
,
,
.
( XY B) PB
( XYC ) QC
( XY A) RA
AP BQ CR
Dedurre che vale il Teorema di Menelao: se P, Q, R sono allineati, allora
= −1.
PB QC RA
AP BQ CR
(v) Vale anche il viceversa, cioè se
= −1 allora P, Q, R sono allineati?
PB QC RA
§ 5.
A.A. 2011-12
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
251
§ 5. A.A. 2011-12
SCRITTO #1 - 2011-06-14 (15:00-17:00, U9-07)
(16) [4u] Si consideri la funzione F : R2 ∖ {0} → R2 , definita ponendo
)
(
2xy x 2 − y2
F ( x, y) = 2
,
.
x + y2 x 2 + y2
Dimostrare i seguenti fatti.
(i) La funzione F induce una funzione continua f : P1 (R) → R2 .
(ii) L’immagine di f in R2 è la circonferenza unitaria S 1 = {( x, y) ∈ R2 : x 2 + y2 = 1}.
(iii) La funzione f : P1 (R) → R2 è iniettiva.
(iv) Dedurre che lo spazio proiettivo P1 (R) è omeomorfo alla circonferenza S 1 .
(17) [6u] Sia F la matrice 2 × 2 definita da
[
1 1
F=
1 0
]
e φ : Z × R2 → R2 la funzione definita da
φ (k, x) = F k x
per ogni x ∈ R2 , dove F k indica il prodotto di k copie di F (se k > 0), oppure il prodotto di −k copie dell’inversa
F −1 (se k < 0), oppure l’identità quando k = 0. Dimostrare i seguenti fatti.
(i) La funzione φ è ben definita ed è una azione di Z su R2 .
(ii) I due punti (1, 0) e (0, 1) appartengono alla medesima orbita in R2 .
(iii) L’azione φ induce una azione ϕ di G = Z su P1 (R), definita ponendo
[ ′]
[ ]
x
′
′
k x
ϕ(k, [ x : u]) = [ x : u ], con ′ = F
.
u
u
(iv) Esistono esattamente due punti p0 e p1 in P1 (R) fissati dall’azione di G = Z su P1 (R) (cioè fissati da
ogni g ∈ G). Come si scrive l’azione di G su R2 (e quindi su P1 (R)) in una base di R2 che contiene i
due vettori p̃0 e p̃1 , se [ p̃i ] = pi per i = 0, 1?
(v) Se il punto p ∈ P1 (R) non è fissato, p ̸∈ {p0 , p1 }, allora il suo stabilizzatore G p è banale e la sua orbita
Gp in P1 (R) ha p0 e p1 per punti di accumulazione. (usare il punto precedente)
(vi) Lo spazio quoziente P1 (R)/G non è di Hausdorff.
(18) [5u] Siano a, b, c > 0 tre parametri positivi fissati. Sia T il tetraedro in E3 di vertici O = (0, 0, 0),
A = (a, 0, 0), B = (0, b, 0), C = (0, 0, c), e S la sua sfera inscritta, di raggio r e centro X. Dimostrare i seguenti
fatti.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
252
#B. TEMI D’ESAME
(i) Per ogni spigolo s di T , il piano bisettore dell’angolo diedro tra le due facce che insistono su s, passa per
X.
(ii) Il centro X appartiene alla retta per O di giacitura (1, 1, 1), e la distanza del punto di coordinate (t, t, t )
dal piano che contiene A, B e C è uguale a
|t (ab + ac + bc) − abc|
√
a2 b2 + a2 c2 + b2 c2 .
(iii) L’area d del triangolo ABC è uguale a
d=
1√ 2 2
a b + a2 c2 + b2 c2 .
2
(Si consideri che il volume di un tetraedro di lati a, b e c è per definizione uguale a 1/6V , dove V è il
volume del parallelogramma di lati a, b, e c, con a, b, c ∈ R3 , e che il volume di un tetraedro è uguale
a 1/3Ah, dove A è l’area di una sua faccia e h l’altezza corrispondente)
(iv) Il centro della sfera S ha coordinate baricentriche (rispetto ai vertici O, A, B e C del tetraedro) proporzionali a 2d : bc : ac : ab, dove d indica l’area del triangolo ABC. In altre parole,
1
abc
2dO + bcA + acB + abC
1 .
=
X=
2d + bc + ac + ab
2d + bc + ac + ab
1
(v) Determinare per quali valori di a, b, c il centro X coincide con il baricentro di T .
SCRITTO #2 - 2011-06-28 (14:30-16:30, U9-07)
(19) [4u] Su X = R2 con la topologia standard, sia ∼ la relazione definita da
( x, y) ∼ ( x ′ , y′ ) ⇐⇒ ∃(a, b) ∈ Z × Z : ( x ′ , y′ ) = (a + (−1)b x, b + y).
(i) Dimostrare che ∼ è una relazione di equivalenza.
(ii) Dire se il quoziente X/∼ è compatto; dire se è connesso.
(iii) Dire se la proiezione π : X → X/∼ è aperta; dire se è chiusa.
(iv) Dire se il quoziente X/∼ è di Hausdorff.
(20) [5u] Sia ρ : P1 (C) → P1 (C) l’applicazione
ρ([Z0 : Z1 ]) = [Z1 : Z0 ].
(i) Dimostrare che ρ è ben definita.
(ii) Dire se ρ è continua, aperta, chiusa.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
253
§ 5. A.A. 2011-12
(iii) Dire se ρ è una mappa proiettiva.
(iv) Dimostrare che l’applicazione
f : P2 (R) → P1 (C),
f ([ X : Y : Z ]) = [ X : Y + iZ ]
è ben definita, suriettiva e continua.
(v) Determinare quali sono le rette proiettive l ⊂ P2 (R) per cui esiste una retta proiettiva l ′ ⊂ P2 (R) tale
che
ρ( f (l )) = f (l ′ ).
(21) [6u] Si consideri la funzione d : P1 (R) × P1 (R) → R, definita ponendo
d ([ x : u], [ x̂ : û]) =
( x û − u x̂ )2
.
( x 2 + u2 ) ( x̂ 2 + û2 )
Sia π : R2 ∖ {0} → P1 (R) la proiezione sul quoziente.
(i) Dimostrare che d è ben definita e continua.
(ii) Mostrare che d ( p, q) = 0 se e soltanto se p = q, per ogni p, q ∈ P1 (R).
(iii) Fissati a, b ∈ P1 (R), a ̸= b, si consideri la funzione
f : P1 ( R ) → R
definita da
f (z ) = d (a, z ) + d (z, b).
Dimostrare che f ha massimo M e minimo m strettamente positivi M ≥ m > 0. Si dimostri poi che
1
nel caso in cui a = [1 : 0] e b = [1 : 1] il minimo m è strettamente minore di , calcolando il valore
2
f ([2 : 1]).
(iv) Determinare se d è una metrica su P1 (R). Qual è il valore di d ([1 : 0], [1 : 1])?
(v) Se A, B ∈ S 1 ⊂ E2 ∼
= R2 sono due punti tali che π ( A) = a e π ( B) = b, con a, b ∈ P1 (R) qualsiasi, si
determini (se esiste) una formula che lega il valore di d (a, b) e l’area del triangolo OAB.
(vi) Fissati a, b ∈ P1 (R), a ̸= b, si determini il luogo di tutti i punti P ∈ E2 , P ̸= 0, tali che d (a, π (P )) =
d (b, π (P )).
SCRITTO #3 - 2011-07-12 (14:30-16:30, U1-08)
(22) [6u] Al variare di λ ∈ R, sia
Xλ = {( x, y) ∈ R2 | max{|x|, |y|} = λ};
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
254
#B. TEMI D’ESAME
si considerino i seguenti sottospazi di R2 con la topologia indotta dalla topologia euclidea:
∪
X=
Xλ = {( x, y) ∈ R2 : 1 ≤ max{|x|, |y|} ≤ 2} ,
λ∈[1,2]
D = {( x, y) ∈ R2 | x 2 + y2 ≤ 1} ,
S 1 = {( x, y) ∈ R2 | x 2 + y2 = 1} .
(i) Dimostrare che X è compatto.
(ii) Costruire una mappa continua e suriettiva f : X → D, tale che f sia iniettiva sul complementare di X1 ,
f ( X1 ) = {0} e f ( X2 ) = S 1 .
(iii) Dimostrare che f è una mappa quoziente.
(iv) Determinare se X/( X1 ∪ X2 ) è omeomorfo a S 2 oppure no (non si richiede una dimostrazione completa,
ma solo una argomentazione intuitiva, anche grafica).
(23) [5u] Si consideri R2 con la topologia euclidea, e sia
ρ : Z × R2 → R2 ,
ρ(k, ( x, y)) = ( x + k, ek y).
(i) Dimostrare che ρ definisce un’azione.
(ii) Determinare quali orbite sono sottospazi chiusi di R2 .
(iii) Sia φ : R2 → R la mappa definita da φ( x, y) = ye−x . Dimostrare che φ induce una mappa continua e
suriettiva definita sullo spazio quoziente X = R2 /Z a valori in R, φ : X → R. Determinare poi se lo
spazio quoziente X è connesso e/o compatto.
(iv) Sia Y lo spazio quoziente di R2 rispetto alla relazione di equivalenza
( x, y) ∼ ( x ′ , y′ ) ⇐⇒ x − x ′ ∈ Z.
Mostrare che la mappa F : R2 → R2 definita da
F ( x, y) = ( x, φ( x, y))
è un omeomorfismo, che induce un omeomorfismo f : X → Y tra gli spazi quozienti X e Y . (Suggerimento: scrivere esplicitamente una inversa per F, e quindi per f )
(v) Determinare se X e Y sono di Hausdorff.
(24) [4u] Si considerino quattro punti A, B, C, D in E3 . Siano a = A − O, b = B − O, c = C − O, d = D − O
i vettori delle loro coordinate in R3 . Per ogni vettore x = x1 e1 + x2 e2 + x3 e3 ∈ R3 (dove ei sono i vettori della
base standard di R3 ), si indichi con x̂ il vettore e0 + x1 e1 + x2 e2 + x3 e3 dello spazio vettoriale R ⊕ R3 con base
e0 , e1 , e2 , e3 .
(i) Dimostrare che la misura del volume V del tetraedro ABCD è uguale a
1 1 1
a b c
1
1
V = |det ( â, b̂, ĉ, d̂ )| = |det 1 1 1
6
6
a2 b2 c2
a3 b3 c3
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
1
d1
|
d2
d3
255
§ 5. A.A. 2011-12
(Si ricordi che la misura del volume del tetraedro è per definizione uguale a
1
det ( B − A, C − A, D − A))
6
(ii) Dimostrare che per ogni k ∈ R si ha
1
1 1 1 1
0
a b c d
k 3 det 1 1 1 1 = det 0
a2 b2 c2 d2
0
a3 b3 c3 d3
0
|a|2
1
ka1
ka2
ka3
|b|2
1
kb1
kb2
kb3
|c|2
1
kc1
kc2
kc3
|d|2
0
1
1
kd1 = − det 0
kd2
0
0
kd3
1
|a|2
ka1
ka2
ka3
1
|b|2
kb1
kb2
kb3
1
|c|2
kc1
kc2
kc3
1
|d|2
kd1
kd2
kd3
e dedurre che
1
1
1
1
1 |a|2 |b|2 |c|2 |d|2
0
1
1
1
1 |a|2
|b|2
|c|2
|d|2
0 1
288V 2 = det 0 a1 b1 c1 d1 · det 0 −2a1 −2b1 −2c1 −2d1
0 a2 b2 c2 d2
0 −2a2 −2b2 −2c2 −2d2
0 a3 b3 c3 d3
0 −2a3 −2b3 −2c3 −2d3
(iii) Dedurre che*
1
1
1
1
0
0
|a − b|2 |a − c|2 |a − d|2
1
0
|b − c|2 |b − d|2 .
288V 2 = det 1 |b − a|2
2
2
0
|c − d|2
1 |c − a| |c − b|
1 |d − a|2 |d − b|2 |d − c|2
0
(Si ricordi che se H e K sono due matrici, det ((H t )K ) = det (H ) det (K ))
(iv) Sia T s un tetraedro (non degenere) in E3 con cinque spigoli lunghi 1 e uno spigolo lungo s ∈ R. Calcolare
il volume di T s ; dimostrare che il tetraedro T s non esiste se s2 ≥ 3. Esiste certamente se 0 < s2 < 3?
SCRITTO #4 - 2011-09-28 (14:30-16:30, U1-09)
(25) [4u] Sia f : R → C la funzione definita da
f (t ) =
1
(1 + eit ),
1 + t2
e j : R → P1 (R) l’inclusione definita da j (t ) = [1 : t ].
(i) Dimostrare che esiste una unica funzione continua F : P1 (R) → C tale che F ◦ j = f .
(ii) Dimostrare che f (R) = F (P1 (R)) ⊂ C.
(iii) Dimostrare che f (R) ⊂ C è compatto.
(iv) Dimostrare che f (R) ⊂ C è connesso.
* Formula
di Tartaglia, con il determinante di Cayley-Menger
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
256
#B. TEMI D’ESAME
(26) [5u] Sia X ⊂ E3 il cubo X = [−1, 1] × [−1, 1] × [−1, 1], e G il gruppo di tutte le rotazioni di SO(3)
che mandano X in sé.
(i) Dimostrare che gli elementi di G sono tutti rotazioni di angolo 2kπ/n, con k ∈ Z e n = 1, 2, 3, 4 attorno
ad assi di rotazione passanti per l’origine (0, 0, 0).
(ii) Determinare il numero di elementi delle orbite di (1, 1, 1), (1, 1, 0) e (1, 0, 0).
(iii) Determinare il numero di elementi dello stabilizzatore dei punti (1, 1, 1) (1, 1, 0 e (1, 0, 0).
(iv) Quanti elementi ha G?
(v) Dimostrare che lo spazio quoziente X/G è connesso e compatto.
(27) [4u] Si considerino nel piano proiettivo P2 (C) tre rette distinte h, r1 e r2 che non passino tutte per
uno stesso punto e due punti Q1 , Q2 tali che Qi ̸∈ h ∪ r1 ∪ r2 per i = 1, 2.
(i) Per i = 1, 2, si dimostri che per ogni x ∈ ri esiste un unico punto fi ( x ) ∈ h tale che i tre punti x, Qi e
fi ( x ) sono allineati.
(ii) Mostrare che fi : ri → h è una corrispondenza biunivoca, per i = 1, 2.
(iii) Al variare di x ∈ r1 , sia g( x ) ∈ r2 il punto definito da
g( x ) = f2−1 ( f1 ( x )) ∈ r2 .
Mostrare che se r1 ∩ r2 non è allineato con Q1 e Q2 , allora per ogni x si ha g( x ) ̸= x.
(iv) Se h è la retta all’infinito, r1 = {( x, 0) : x ∈ C} e r2 = {(0, y) : y ∈ C} gli assi cartesiani nella carta
affine A20 (C), determinare l’espressione di g( x ) nelle coordinate x e y, con le coordinate di Qi come
parametri. È una proiettività?
(28) [8u] Sia xn la successione in R definita per n ≥ 1 da
xn =
n
∑
1
k=1
k
,
e sia p : R → X = R/Z la proiezione sul quoziente, dove X è il quoziente rispetto alla relazione di equivalenza
x ∼ y ⇐⇒ x − y ∈ Z.
(i) Dimostrare che l’insieme
Y = {p( xn ) : n ≥ 1} ⊂ X
ha infiniti elementi.
(ii) Dimostrare che la successione {p( xn )} ha almeno un punto di accumulazione in X.
(iii) Dimostrare che la chiusura di Y in X è uguale a X. (Attenzione: molto difficile)
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
257
§ 5. A.A. 2011-12
SCRITTO #5 - 2012-02-02 (14:30-16:30, U9-07)
(29) [4u] Si consideri la funzione σ : P1 (R) × P1 (R) → P3 (R) definita ponendo
σ ([ x0 : x1 ], [y0 : y1 ]) = [ x0 y0 : x0 y1 : x1 y0 : x1 y1 ] ∈ P3 (R)
per ogni ([ x0 : x1 ], [y0 : y1 ]) ∈ P1 (R) × P1 (R).
(i) Dimostrare che σ è ben definita e continua.
(ii) Sia X ⊂ P3 (R) l’immagine di σ, cioè X = σ (P1 (R) × P1 (R)). Dimostrare che X è compatto e
connesso.
(iii) Dimostrare che X è chiuso in P3 (R) e che la funzione σ è iniettiva.
(iv) Dimostrare che per ogni A = [ x0 : x1 ] ∈ P1 (R) fissato, la funzione P1 (R) → P3 (R) definita da
[y0 : y1 ] 7→ σ (( A, [y0 : y1 ])) ∈ P3 (R)
è la parametrizzazione di una retta proiettiva in P3 (R). Dedurre che per ogni punto P ∈ X esistono due
rette l, r di P3 (R) passanti per P e interamente contenute in X.
Per il prossimo esercizio, si ricordi che se A è una matrice 2 × 2 a coefficienti complessi, allora la trasposta coniugata (aggiunta Hermitiana) di A si indica con A∗ ed è la matrice con coefficienti a ji , se ai j sono i
coefficienti di A.
(30) [5u] Sia SU (2) il gruppo delle matrici unitarie con determinante 1
{
}
SU (2) = A ∈ GL(2, C) : AA∗ = A∗ A = I, det ( A) = 1 .
[
]
[
]
[
]
[
]
1 0
i 0
0 1
0 i
Consideriamo in SU (2) le quattro matrici: u =
,i=
,j=
,k=
.
0 1
0 −i
−1 0
i 0
(i) Dimostrare che SU (2) è compatto.
(ii) Dimostrare che SU (2) è omeomorfo alla sfera S 3 = {x ∈ R4 : ∥x∥2 = 1}.
(iii) Dimostrare che G = {±u, ±i, ± j, ±k} ⊂ SU (2) è un sottogruppo compatto di SU (2).
(iv) Si consideri l’azione di G su SU (2) data da
g · x = gx
per ogni g ∈ G e ogni x ∈ SU (2), dove il prodotto è il prodotto di matrici. Determinare la cardinalità
dell’orbita di x in SU (2), al variare di x in SU (2).
(v) Determinare al variare di x in SU (2) il gruppo di isotropia di x in G, con l’azione definita sopra. Il
quoziente SU (2)/G è compatto nella topologia quoziente?
(31) [6u] Sia [0, 1] ⊂ R l’intervallo unitario, N = {0, 1, 2 . . . , n, . . .} e X = [0, 1]N l’insieme di tutte le
funzioni x : N → [0, 1]. Per ogni famiglia finita di aperti di [0, 1]
U0 , U1 , U2 , . . . , U N ⊂ [0, 1]
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
258
#B. TEMI D’ESAME
(con Ui ⊂ [0, 1] aperto per i = 0, 1, . . . , N) si consideri in X l’insieme
{
}
Φ(U0 , U1 , . . . , U N ) := x ∈ X : ∀i ∈ {0, 1, . . . , N}, x (i ) ∈ Ui ⊂ X.
Sia A la famiglia di tutti i possibili insiemi Φ(U0 , U1 , . . . , U N ) al variare di N ∈ N e degli Ui .
(i) Dimostrare che ∅ ∈ A e X ∈ A.
(ii) Dimostrare che A1 , A2 ∈ A =⇒ A1 ∩ A2 ∈ A.
(iii) Siano A1 = {x ∈ X : x (0) < 1/2, x (1) > 1/2} e A2 = {x ∈ X : x (0) > 1/2, x (1) < 1/2}. Dimostrare che
A1 , A2 ∈ A, e che A1 ∪ A2 ̸∈ A. Determinare se A è una topologia per X.
(iv) Per ogni N ∈ N, sia AN l’insieme definito da
{
}
AN = x ∈ X : x ( N ) ∈ [0, 1/2) .
Dimostrare che AN ∈ A. Descrivere l’insieme
A=
∪
AN .
N∈N
(v) Dimostrare che A è una base per una topologia su X.
|x (n) − y(n)|
∑
(vi) Si consideri la funzione d : X × X → R definita da d ( x, y) = n∈N
. Dimostrare che d è
2n
ben definita, che è una metrica su X, e che gli intorni sferici in X
{
}
Br (z ) = x ∈ X : d ( x, z ) < r
sono aperti di X rispetto alla topologia generata da A.
(32) [4u] Sia E2 il piano euclideo.
(i) Dimostrare che ogni isometria di E2 è composizione di un numero finito di riflessioni (lungo rette).
π
(ii) Sia R : E2 → E2 la rotazione con centro C = (−1, 1) di angolo θ = : si scriva la sua equazione e la si
3
decomponga come composizione di due riflessioni.
(iii) Al variare di g nel gruppo di tutte le isometrie del piano, determinare se la decomposizione di g nel
numero minimo di riflessioni è unica o meno
(iv) Sia f : E2 → E2 la funzione definita da
][ ] [ ]
[
[ ]
2
0 1 x
x
+
7→
0
−1 0 y
y
Dimostrare che è una isometria; determinarne il centro, se è una rotazione; scriverla come composizione
di riflessioni.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
259
§ 6. A.A. 2010-11
§ 6.
A.A. 2010-11
8 GIU 2010 (14:30, U1-01)
(33) [4u] Si consideri la seguente funzione f : C → C, definita da
zz̄
2 2
z − z̄
f (z ) =
0
se z2 ̸= z̄2
se z2 = z̄2 .
(i) Per quali w ∈ C la controimmagine f −1 (w) = {z ∈ C : f (z ) = w} è compatta?
(ii) Per quali w ∈ C la controimmagine f −1 (w) è connessa?
(iii) È vero che per ogni w ∈ C la controimmagine f −1 (w) è un chiuso di C?
(iv) Esiste un chiuso K ⊂ C la cui controimmagine f −1 (K ) non è un chiuso di C?
(34) [6u] Sia X lo spazio di tutte le matrici 2 × 2 a coefficienti in R non tutti nulli, con la metrica euclidea
(i.e. identificando X con R4 ∖ {0}), e G = SO(2) il gruppo di tutte le matrici ortogonali con determinante 1.
Si consideri l’azione di G su X definita dal prodotto di matrici, cioè se g ∈ G e x ∈ X, allora g · x è il prodotto
righe-per-colonne di g con x.
(i) Si determini lo stabilizzatore di x, al variare di x in X.
(ii) Si determini se la mappa X → R definita da
[
]
√
a c
∈ X 7→ a2 + b2 + c2 + d 2 ∈ R
b d
induce una mappa continua r : X/G → (0, +∞) ⊂ R.
(iii) Si determini se la mappa X → P1 (C) definita da
[
]
a c
∈ X 7→ [a + ib : c + id ] ∈ P1 (C)
b d
induce una mappa continua h : X/G → P1 (C).
(iv) La funzione f : X/G → (0, +∞) × P1 (C) definita da f ([ x ]) = (r ( x ), h( x )) è continua?
(v) La funzione g: (0, +∞) × C2 ∖ {0} → X definita da
(r, (a + ib, c + id )) → √
r
[
a2 + b2 + c2 + d 2
induce una mappa continua g: (0, +∞) × P1 (C) → X/G?
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
a c
b d
]
260
#B. TEMI D’ESAME
(35) [4u] Al variare dei parametri s, t ∈ Q, siano A, B, C i tre punti di A3 (Q) di coordinate
A = (1, 2, 3t ),
B = (1, 2s, 3t ),
C = (s, 2s, 3).
(i) Determinare i valori di s, t ∈ Q per cui i tre punti sono allineati e distinti.
(ii) Si scriva l’equazione cartesiana del luogo dei baricentri dei tre punti A, B, C, al variare di s, t ∈ Q.
(iii) Trovare, se esiste, l’equazione di un piano di A3 (Q) che contenga A, B, C per ogni s, t ∈ Q.
(iv) Per i valori di s, t ∈ Q per cui i tre punti sono allineati, trovare una mappa affine A3 (Q) → A3 (Q) tale
che
(1, 0, 0) 7→ A
(0, 1, 0) 7→ B
(0, 0, 1) 7→ C.
(36) [4u] Sia E2 il piano euclideo.
(i) Dimostrare che ogni rotazione di E2 è composizione di due riflessioni (lungo rette).
π
(ii) Sia R : E2 → E2 la rotazione con centro C = (1, 1) di angolo θ = : si scriva come composizione di
3
due riflessioni.
(iii) Dimostrare che ogni isometria del piano euclideo E2 può essere scritta come la composizione di al più
tre riflessioni (lungo rette).
(iv) Sia f : E2 → E2 la funzione definita da
[ ]
[
][ ] [ ]
x
0 1 x
2
7→
+
y
1 0 y
0
Scriverla come composizione di riflessioni.
(#2) - 20 LUGLIO 2010, 14:30-16:30, AULA U9-07
(37) [4u] Sia f : R2 → R2 la mappa definita da f ( x, y) = ( x + y, xy), dove R2 ha la topologia della metrica
euclidea.
(i) Dimostrare che f è continua.
(ii) Per quali valori di w ∈ R2 la controimmagine f −1 ( w) è un sottospazio compatto non vuoto di R2 ?
(iii) Per quali valori di w ∈ R2 si ha che f −1 ( w) è connesso?
(iv) La mappa f è una mappa aperta?
(38) [6u] Sia X ⊂ SO(3) l’insieme di tutte le rotazioni di SO(3) di angolo π, cioè
X = {g ∈ SO(3) : g2 = I, g ̸= I},
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
261
§ 6. A.A. 2010-11
dove I è la matrice identità 3 × 3.
(i) Mostrare che la funzione
A 7→ Traccia ( At A)
è il quadrato di una norma definita sullo spazio vettoriale delle matrici quadrate 3 × 3.
(ii) Dimostrare che la funzione d : SO(3) × SO(3) → R definita da
√
d ( A, B) = Traccia [( At − Bt )( A − B)]
è una metrica (distanza) su SO(3).
(iii) L’insieme X ∪ {I} è un sottogruppo di SO(3)? È chiuso?
√
(iv) Dimostrare che se g ∈ X, allora la distanza di g dall’identità I è uguale a 2 2.
(v) Dimostrare che X è compatto.
(39) [4u] Siano A, B, C, D quattro punti indipendenti dal punto di vista affine in A3 (Q), e T il tetraedro
con vertici ABCD.
(i) Sia Q il baricentro di T . Dimostrare che se una affinità f : A3 (Q) → A3 (Q) manda T in sé f (T ) = T ,
allora f (Q) = Q.
(ii) Determinare quando i punti medi M e N degli spigoli AB e CD sono allineati con il baricentro Q.
(iii) Quando il tetraedro T̂ che ha per vertici i baricentri delle facce di T è immagine di T con una affinità?
(iv) Scrivere in un sistema di riferimento affine (opportuno) le coordinate di A, B, C, D, M, N, Q.
(40) [4u] Siano in P2 (C) fissati i quattro punti A = [1 : 0 : 0], B = [0 : 1 : 0], C = [0 : 0 : 1],
D = [1 : 1 : 1].
(i) Esistono tre punti (distinti) allineati in {A, B, C, D}?
(ii) Quante sono le proiettività f : P2 (C) → P2 (C) tali che f ( A) = A, f ( B) = B e f (C ) = C?
(iii) Quante sono le proiettività f : P2 (C) → P2 (C) tali che f ( A) = B, f ( B) = C, f (C ) = D, f ( D) = A?
(#3) - 7 SETTEMBRE 2010, 14:30-16:30, AULA U1-08
(41) [4u] Sia f : C2 → C la mappa definita da f ( x, y) = xy, dove C2 e C hanno la topologia della metrica
euclidea e y indica il complesso coniugato di y ∈ C.
(i) Dimostrare che f è continua.
(ii) Per quali valori di w ∈ C la controimmagine f −1 ( w) è un sottospazio compatto non vuoto di C2 ?
(iii) Per quali valori di w ∈ C si ha che f −1 ( w) è connesso e non vuoto?
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
262
#B. TEMI D’ESAME
(iv) Determinare cosa è l’immagine f ( X ) ⊂ C, dove
X = {( x, y) ∈ C2 : |x|2 + |y|2 = 1} ⊂ C2 ,
e |x|2 = xx e |y|2 = yy.
(42) [6u] Sia X ⊂ GL(2, R) l’insieme di tutte le matrici 2 × 2 invertibili (a coefficienti reali) a traccia nulla
e determinante 1, cioè
{[
]
}
a c
X=
| a, b, c, d ∈ R, ad − bc = 1, a + d = 0 ,
b d
con la topologia metrica dello spazio di matrici ( ∼
= R4 ).
(i) Lo spazio X è compatto?
(ii) Quali sono gli elementi del sottoinsieme Y ⊂ X formato dalle matrici ortogonali di X (cioè elementi di
Y = X ∩ O(2))? E quali sono gli elementi che sono matrici simmetriche?
(iii) Sia G = GL(2, R) il gruppo delle matrici invertibili 2 × 2. Dimostrare che la funzione G × X → X
definita da
(S, A) 7→ S · A = SAS −1 ,
per ogni S ∈ G e ogni A ∈ X, dove il prodotto SAS −1 è il prodotto di matrici, è una azione di G su X.
(iv) Determinare se gli elementi di Y sono contenuti in una sola orbita di G oppure no.
(v) Sia A ∈ X. Sia f A : R2 → R la funzione definita per ogni v ∈ R2 ,v ̸= 0, da
f A ( v) =
|Av − v|
.
|v|
Dimostrare che f A ammette massimo e minimo.
(vi) Determinare se lo spazio X e lo spazio quoziente X/G sono connessi o no. (suggerimento: si ricordi il
punto sulle matrici simmetriche)
(43) [4u] Sia G l’insieme di tutte le affinità di A2 (Q) in sé che fissano tutti i punti della retta di equazione
x + y = 1.
(i) Determinare se G è un gruppo o no.
(ii) Determinare se G è finito o no.
(iii) Sia f : G → A2 (Q) la funzione definita ponendo
f ( g) = g · O,
dove O = (0, 0) ∈ A2 (Q) è l’origine. Determinare se f è iniettiva e/o suriettiva.
(iv) Determinare quali elementi di G sono traslazioni e/o omotetie.
(44) [4u] Sia P2 (C) il piano proiettivo complesso, con la topologia quoziente.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
263
§ 6. A.A. 2010-11
(i) Si dimostri che due rette distinte in P2 (C) si incontrano in uno e un solo punto.
(ii) Si mostri che lo spazio costituito da tutte le rette di P2 (C) è a sua volta un piano proiettivo, che
indichiamo con P2 (C)∗ .
(iii) Sia
{
}
∆ = (r, r ) : r ∈ P2 (C)∗ ⊂ P2 (C)∗ × P2 (C)∗ .
Si consideri la funzione
f : P2 (C)∗ × P2 (C)∗ ∖ ∆ → P2 (C)
definita da { f (r, r ′ )} = r ∩ r ′ , se r e r ′ sono due rette distinte. Mostrare che è ben definita e continua.
(#4) - 28 SETTEMBRE 2010, 14:30-16:30, AULA U9-07
(45) [4u] Sia f la mappa definita da
f (z ) =
z2 + z2
,
z+z
dove z ∈ C, C ha la topologia metrica e z indica il complesso coniugato di z ∈ C.
(i) Determinare il dominio di f e dimostrare che f è ivi continua. (Si ponga z = a + ib con a, b ∈ R, …)
(ii) Determinare l’immagine di f ,
{ f (z ) : z ∈ C} = {w ∈ C : ∃z ∈ C : f (z ) = w}.
(iii) Determinare per quali w ∈ C la controimmagine f −1 ( w) è un sottospazio compatto e non vuoto di C.
(iv) Determinare per quali valori di w ∈ C la controimmagine f −1 ( w) è un sottospazio connesso e non vuoto
di C.
(46) [6u] Sia G ⊂ GL(2, R) l’insieme di tutte le matrici 2 × 2 con determinante 1, cioè
{[
]
}
a c
G=
| a, b, c, d ∈ R, ad − bc = 1 ,
b d
con la topologia metrica dello spazio di matrici ( ∼
= R4 ).
(i) Lo spazio G è un gruppo topologico compatto?
(ii) La funzione traccia Tr : G → R definita da
[
Tr
]
a c
= a+d
b d
è continua? È un omomorfismo di gruppi?
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
264
#B. TEMI D’ESAME
(iii) Si consideri la funzione φ : G × P1 (R) → P1 (R) definita da
([
φ:
]
)
a b
, [ x : u] 7→ [ax + bu : cx + du] ∈ P1 (R)
c d
Dimostrare che è ben definita e che è una azione continua di G su X = P1 (R).
(iv) Dimostrare che gli elementi A di G che fissano uno e un solo punto di X sono quelli la cui traccia
Tr ( A) = ±2. Dedurre che il sottospazio Y ⊂ G formato da tutti questi elementi è chiuso in G.
(v) Se P ∈ X è un punto generico, dire se lo stabilizzatore G P ⊂ G è un sottogruppo chiuso.
(vi) Determinare se Y è compatto.
(47) [4u] Sia G l’insieme di tutte le affinità di A2 (Q) in sé che fissano tutti i punti della retta di equazione
x + y = 2.
(i) Determinare se G è un gruppo o no.
(ii) Determinare se G è finito o no.
(iii) Sia f : G → A2 (Q) la funzione definita ponendo
f ( g) = g · O,
dove O = (0, 0) ∈ A2 (Q) è l’origine. Determinare se f è iniettiva e/o suriettiva.
(iv) Determinare quali elementi di G sono traslazioni e/o omotetie.
(48) [4u] Sia E2 il piano euclideo.
(i) Dimostrare che ogni isometria di E2 è composizione di un numero finito di riflessioni (lungo rette).
π
(ii) Sia R : E2 → E2 la rotazione con centro C = (1, 1) di angolo θ = : si scriva come composizione di
5
due riflessioni.
(iii) Determinare se la decomposizione di una isometria g nel numero minimo di riflessioni è unica o meno,
al variare di g nel gruppo di tutte le isometrie del piano.
(iv) Sia f : E2 → E2 la funzione definita da
[ ]
[
][ ] [ ]
x
0 −1 x
1
7→
+
y
1 0 y
0
Dimostrare che è una isometria; determinarne il centro, se è una rotazione; scriverla come composizione
di riflessioni.
(#5) - 1 FEB 2011, 14:30-16:30, AULA U9-07
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
265
§ 6. A.A. 2010-11
(49) [4u] Sia f la mappa f : P1 (R) → P1 (R) definita da
f ([ x : u]) = [ x + u : x − u]
dove [ x : u] ∈ P1 (R), e P1 (R) ha la topologia quoziente.
(i) Dimostrare che f è una mappa ben definita e continua.
(ii) Determinare se f è biunivoca.
(iii) Determinare per quali [ x : u] ∈ P1 (R) si ha f ([ x : u]) = [ x : u].
(iv) Dimostrare che P1 (R) è uno spazio di Hausdorff e che ogni sottoinsieme chiuso di P1 (R) è compatto.
(50) [6u] Sia G ⊂ GL(2, R) l’insieme di tutte le matrici 2 × 2 definito da
{[
]
}
a c
2
2
2
2
G=
| a, b, c, d ∈ R, ac + bd = 0, a + b = c + d ̸= 0 ,
b d
con la topologia metrica dello spazio di matrici ( ∼
= R2 , si consideri la matrice L g
= R4 ). Per ogni g ∈ C ∼
2
2
∼
∼
associata alla funzione R-lineare R = C → C = R definita da
z ∈ C 7→ gz ∈ C
nella base canonica ⌜{1, i}⌟ di C su R.
(i) Mostrare che per ogni g ∈ C∗ = C ∖ {0}, si ha L g ∈ G.
(ii) La funzione C∗ ∋ g 7→ L g ∈ G è iniettiva? È suriettiva? È continua?
(iii) Dato g ∈ C∗ , si consideri l’insieme
X g = {(L g )n : n ∈ Z} .
Mostrare che X g ⊂ G, e che è un gruppo rispetto al prodotto di matrici.
(iv) Determinare per quali g ∈ C∗ si ha che X g è limitato.
(v) Determinare per quali g ∈ C∗ si ha che X g è compatto.
(51) [4u] Sia G l’insieme di tutte le affinità di A2 (C) in sé che fissano tutti i punti della retta di equazione
x + 2y = 3.
(i) Determinare se G è un gruppo o no.
(ii) Determinare se G è finito o no.
(iii) Sia f : G → A2 (C) la funzione definita ponendo
f ( g) = g · O,
dove O = (0, 0) ∈ A2 (C) è l’origine. Determinare se f è iniettiva e/o suriettiva.
(iv) Determinare quali elementi di G sono traslazioni e/o omotetie.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
266
#B. TEMI D’ESAME
(52) [4u] Sia T ⊂ E3 il tetraedro di vertici A = (0, 0, 0), B = (1, 1, 0), C = (1, 0, 1), D = (0, 1, 1).
(i) Mostrare che T è un tetraedro regolare.
(ii) Determinare raggio e centro delle sfere inscritta e circoscritta di T .
(iii) Determinare le coordinate delle proiezioni dei vertici di T , proiettate sul piano z = 0 con proiezione
parallela alla direzione (1, 2, 3).
(iv) Calcolare il volume di T .
§ 7.
A.A. 2009-10
SCRITTO #1 - 23 GIU 2009 (14:30, U1-03)
(53) Consideriamo il seguente sottoinsieme di R2 (con la topologia euclidea):
X = {( x, y) ∈ R2 : xy ̸∈ Z}.
(i) È aperto? È chiuso?
(ii) Consideriamo l’iperbole C di equazione x 2 − y2 = 1. L’intersezione X ∩ C è aperta nella topologia di
C? È chiusa nella topologia di C? E nella topologia di R2 ?
(iii) X e X ∩ C sono compatti? sono connessi?
(iv) Si consideri la funzione φ : Z × X → R2 definita ponendo
φ(k, ( x, y)) = (2k x, 2k y).
È vero che l’immagine di φ è contenuta in X?
(54) Dimostrare che:
(i) S 1 non è omeomorfo ad un intervallo.
(ii) Gli intervalli (0, 1) e [0, 1] non sono omeomorfi.
(iii) Se uno spazio topologico X è connesso e X = A ∪ B con A ̸= ∅ e B ̸= ∅, allora o A ∩ B ̸= ∅ oppure
B ∩ A ̸= ∅.
(iv) Se X ⊂ R non è un intervallo, allora non è connesso.
(55) Sia G ⊂ SO(2) un sottogruppo di SO(2) e X = S 1 ⊂ R2 , con l’azione standard di G su X. Mostrare
che:
(i) Per ogni g ∈ G, la mappa x ∈ S 1 7→ gx ∈ S 1 è un omeomorfismo.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
267
§ 7. A.A. 2009-10
(ii) Se G è un gruppo ciclico finito, allora X/G ≈ S 1 .
(iii) Se l’orbita di x ∈ X non è un insieme finito, allora G non è un gruppo finito.
(iv) Per n ≥ 2 fissato, quali sono gli elementi di SO(2) di ordine n?
π.
(56) Siano A e B due punti distinti di E2 , e f , g le rotazioni attorno ad A e B (rispettivamente) di angolo
(i) Determinare i punti fissati dalle composte f g e gf .
(ii) Descrivere tutti gli elementi del gruppo di isometrie di E2 generato da f e g. È un gruppo abeliano
(commutativo)?
(iii) Determinare l’orbita di A, di B e del punto medio del segmento AB.
(57) Si considerino in P2 (R) le rette H = {[ x0 : x1 : x2 ] ∈ P2 (R) : x1 = 0} e H ′ = {[ x0 : x1 : x2 ] ∈
: x2 = 0}.
P2 ( R )
(i) Al variare di P ∈ H, si scriva l’equazione della retta lP passante per P e per il punto Q, dove Q = [0 :
1 : 1] è fissato.
(ii) Si determini l’intersezione di lP con H ′ in funzione di P.
(iii) La funzione indotta H 7→ H ′ manda punti all’infinito in punti all’infinito, se la retta all’infinito ha
equazione x0 = 0)?
(iv) Si scriva in coordinate affine (la retta all’infinito ha equazione x0 = 0) la trasformazione indotta da H
ad H ′ .
SCRITTO #2 - 14 LUG 2009 (14:30, U1-03)
(58) Sia GA(n, R) il gruppo affine su X = An (R), e A ∈ An (R) un punto.
(i) Qual è lo stabilizzatore di A in GA(n, R)? Qual è l’orbita di A in X? L’azione è transitiva?
(ii) Si consideri l’azione di GA(n, R) su X × X definita ponendo f ( A, B) = ( f ( A), f ( B)) per ogni f ∈
GA(n, R) e per ogni ( A, B) ∈ X 2 . Al variare di ( A, B) ∈ X 2 , quali sono lo stabilizzatore e l’orbita di
( A, B)? L’azione è transitiva?
(iii) Si consideri l’azione di GA(n, R) su X × X × X definita ponendo f ( A, B, C ) = ( f A, f B, f C ) per ogni
f ∈ GA(n, R) e per ogni A, B, C ∈ X. Al variare di ( A, B, C ) ∈ X 3 , quali sono lo stabilizzatore e l’orbita
di ( A, B, C )?
(59) Sia X un insieme e τ ⊂ 2X la famiglia formata da tutti i sottoinsiemi A di X che hanno complemento
finito, cioè tali che X ∖ A ha un numero finito di elementi, più l’insieme ∅.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
268
#B. TEMI D’ESAME
(i) Dimostrare che τ è una topologia su X.
(ii) Mostrare che se X è finito, allora con la topologia τ è di Hausdorff.
(iii) Mostrare che se X non è finito e A, B ⊂ X sono due aperti non vuoti di τ, allora A ∩ B ̸= ∅: dedurre che
se τ è di Hausdorff, allora X è finito.
(iv) Determinare per quali cardinalità di X lo spazio topologico ( X, τ ) è connesso.
(60) Si consideri il sottoinsieme di R definito da
X={
p
: p ∈ Z, q ∈ N, q > 0, |p2 − q2 | ≤ 10100 },
q
con la topologia indotta da quella metrica di R.
(i) X è chiuso?
(ii) X è compatto?
(iii) X è connesso?
(61) Determinare quali dei seguenti sottospazi di R2 sono compatti e quali sono connessi.
(i) {( x, y) ∈ R2 : x 10 + y10 < 10}.
(ii) {( x, y) ∈ R2 : ∃n ∈ N : x n + yn = n}.
(iii) {( x, y) ∈ R2 : ∃n ∈ N, n ≥ 1 : 1 + x + x 2 + . . . + x n = y}.
(62) Siano A, B, C tre punti non allineati dello spazio affine An (R).
(i) Dimostrare che la retta r che passa per i punti medi di AB e BC è parallela alla retta per AC.
(ii) Si consideri la chiusura proiettiva X del piano affine che contiene ABC. Scrivere, in un sistema di
riferimento proiettivo opportuno, l’equazione della retta r.
(iii) Determinare il punto all’infinito di r.
(iv) Scrivere, in un opportuno sistema di riferimento proiettivo su X, una proiettività che permuti ciclicamente
i tre punti ABC.
SCRITTO #3 - 29 SET 2009 (14:30, U1-11)
(63) Determinare tutti i punti di accumulazione dei seguenti insiemi:
(i) {x ∈ Z : x 2 ∈ Q}.
(ii) {z ∈ C : z2 ∈ Z}.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
269
§ 7. A.A. 2009-10
(iii) {z ∈ C : z2 ∈ Q}.
(iv) {x ∈ R : x 2 ∈ Z}.
(64) Dei seguenti sottoinsiemi (rispetto alla topologia metrica), si determini se sono aperti, chiusi, connessi,
compatti.
(i) {( x, y) ∈ R2 : ex+y ∈ Z}.
(ii) {z ∈ C : ez ̸∈ Z}.
√
(iii) {t ∈ R : eit = e2it }, dove i = −1.
(iv) {(z, w) ∈ C2 : |z|2 + |w|2 = 1}, dove |z|2 = zz̄.
(65) Siano A, B, C, D quattro punti indipendenti dal punto di vista affine di A3 (R), e G il gruppo di tutte
le affinità che mandano l’insieme {A, B, C, D} in sé.
(i) Determinare il numero di elementi di G.
(ii) Determinare il numero di elementi degli stabilizzatori rispetto all’azione del gruppo G di A, di B, di C,
e di D.
(iii) L’azione di G è transitiva su {A, B, C, D}?
(iv) Determinare l’insieme dei punti dello spazio affine fissati da tutti gli elementi di G.
(66) Siano A ̸= B due punti di E4 , v e w due vettori indipendenti e r, l le rette per A, B e con giacitura v, w
rispettivamente.
(i) Determinare il numero di rette ortogonali (e incidenti) a r e l.
(ii) Discutere la dimensione del più piccolo sottospazio affine che contiene le due rette r e l.
(iii) Se r e l non si intersecano, determinare il numero di piani che contengono sia r che l.
(67) Siano A = [1 : 0], B = [0 : i ] e C = [1 : i ] tre punti di P1 (C).
(i) Trovare, se esiste, una proiettività f : P1 (C) → P1 (C) tale che f ( A) = A, f ( B) = B e f (C ) ̸= C.
(ii) Dimostrare che se f : P1 (C) → P1 (C) è una proiettività che fissa almeno tre punti distinti, allora f è
l’identità.
(iii) Determinare se esistono matrici F ⊂ GL(2; C) che inducono una proiettività f = [ F ] : P1 (C) → P1 (C)
con un unico punto fisso.
SCRITTO #4 - 20 NOV 2009 (14:30, U2-02)
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
270
#B. TEMI D’ESAME
(68) Determinare tutti i punti di accumulazione dei seguenti sottoinsiemi di R:
(i) {
k
: h, k ∈ Z}.
3h
(ii) {(2m )1/n : m, n ∈ Z, n dispari}.
h
: h, k ∈ Z, hk ≤ 1, k ̸= 0}.
k
nπ
(iv) {cos
: n ∈ Z}.
2009
(iii) {
(69) Dei seguenti sottoinsiemi di R2 ≈ C (rispetto alla topologia metrica), si determini se sono aperti,
chiusi, connessi, compatti.
(i) {( x, y) ∈ R2 : x + 2y + xy ≤ 1}.
(ii) {( x, y) ∈ R2 : x 3 − y3 ≥ 3}.
(iii) {z ∈ C :
zz
∈ N ∨ z = 0}.
z+z
(iv) {z ∈ C : z + z2 + . . . + z10 = 0}.
(70) In A2 (R) sian P0 , P1 e P2 i tre punti
P0 = (1, 0), P1 = (3, 1), P2 = (2, 2).
(i) Si determinino le coordinate x, y del baricentro Q del triangolo P0 , P1 , P2 .
(ii) Siano u, v le coordinate affini rispetto al riferimento affine P0 , P1 , P2 . Si scrivano u, v in funzione di
x, y.
(iii) Si determinino le coordinate u, v di Q.
−−−−→
(iv) Si scriva l’equazione della proiezione sulla retta P0 P1 parallela alla direzione P0 P2 , nelle coordinate più
convenienti.
(71) Siano date in A2 (C) le due rette r e s di equazione rispettivamente ix + y = 1 e x + iy = i.
(i) Determinare le coordinate dei punti di intersezione di r e s.
(ii) Trovare, se esiste, un sistema di riferimento affine in cui le due rette r e s siano gli assi cartesiani.
(iii) Sia P2 (C) la chiusura proiettiva di A2 (C). Scrivere le equazioni dei completamenti proiettivi di r e s
in un sistema di riferimento opportuno.
(iv) Esiste una proiettività che manda r in s? Se sì trovarne una, altrimenti dimostrare che non è possibile.
(72) Sia P1 (R) la retta proiettiva reale, e f : S 1 → P1 (R) la funzione definita da f ((cos t, sin t )) =
[cos t : sin t ]. Dimostrare che:
(i) f è ben definita e continua.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
271
§ 7. A.A. 2009-10
(ii) f è suriettiva.
(iii) f è una funzione chiusa.
(iv) Determinare se f è un omeomorfismo.
SCRITTO #5 - 19 GEN 2010 (14:30, U1-14)
(73) Determinare tutti i punti di accumulazione dei seguenti sottoinsiemi degli spazi topologici (metrici)
indicati:
(i) {eh+ik : h, k ∈ Z} ⊂ C.
(ii) {enπ/4i : n ∈ Z} ⊂ C.
1
(iii)
:
h,
k
∈
Z,
hk
̸
=
0
⊂ R.
1
1
+
h k
(iv) {sin(kπ/5) cos(hπ/5) : h, k ∈ Z} ⊂ R.
(74) Dei seguenti sottoinsiemi di R2 ≈ C (rispetto alla topologia metrica), si determini se sono aperti,
chiusi, connessi, compatti.
(i) {( x, y) ∈ R2 : y2 ≥ x 3 }.
(ii) {( x, y) ∈ R2 : ( x 12 + y12 )3 ≤ ( x 3 + y3 )12 }.
(iii) {z ∈ C : |z|4 = z + z}.
(75) Sia F5 il campo con 5 elementi, e A = (1, 2), B = (0, 0) i due punti di A2 (F5 ).
(i) Scrivere l’equazione della retta per A e B in A2 (F5 ).
(ii) Quanti elementi ha l’insieme X = {( x, y) ∈ A2 (F5 ) : x 2 + y2 = 1}?
(iii) Determinare il numero e le equazioni delle rette per (1, 0).
(iv) Calcolare il numero totale di rette in A2 (F5 ).
(76) Sia G il gruppo di tutte le proiettività P1 (C) → P1 (C) che fissano il punto [1 : 0] ∈ P1 (C).
(i) Per ogni proiettività g, descrivere g in forma di matrice 2 × 2, e determinare la condizione g([1 : 0]) =
[1 : 0 ].
(ii) Sia A1 (C) ⊂ P1 (C) la retta affine con la carta [ x : 1]. Mostrare che per ogni g ∈ G, g manda A1 (C)
in sé.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
272
#B. TEMI D’ESAME
(iii) Scrivere la restrizione di g ∈ G sulla parte affine A1 (C) in coordinate affini.
SCRITTO #6 - 16 FEB 2010 (14:30, U1-06)
(77) Sia X un insieme e τ ⊂ 2X la famiglia formata da tutti i sottoinsiemi A di X che hanno complemento
finito, cioè tali che X ∖ A ha un numero finito di elementi, più l’insieme ∅.
(i) Dimostrare che τ è una topologia su X.
(ii) Mostrare che se X è finito, allora con la topologia τ è di Hausdorff.
(iii) Mostrare che se X non è finito e A, B ⊂ X sono due aperti non vuoti di τ, allora A ∩ B ̸= ∅: dedurre che
se τ è di Hausdorff, allora X è finito.
(iv) Determinare per quali cardinalità di X lo spazio topologico ( X, τ ) è connesso.
(78) Determinare tutti i punti di accumulazione dei seguenti insiemi:
(i) {x ∈ Z : x 3 ∈ Q}.
(ii) {z ∈ C : z3 ∈ Z}.
(iii) {z ∈ C : z3 ∈ Q}.
(iv) {x ∈ R : x 3 ∈ Z}.
(79) Dei seguenti sottoinsiemi (rispetto alla topologia metrica), si determini se sono aperti, chiusi, connessi,
compatti.
(i) {( x, y) ∈ R2 : ex−y ∈ Z}.
(ii) {z ∈ C : ez ̸∈ Z}.
√
(iii) {t ∈ R : eit = e3it }, dove i = −1.
(iv) {(z, w) ∈ C2 : |z|2 − |w|2 = 1}, dove |z|2 = zz̄.
π.
(80) Siano A e B due punti distinti di E2 , e f , g le rotazioni attorno ad A e B (rispettivamente) di angolo
(i) Determinare i punti fissati dalle composte f g e gf .
(ii) Descrivere tutti gli elementi del gruppo di isometrie di E2 generato da f e g. È un gruppo abeliano
(commutativo)?
(iii) Determinare l’orbita di A, di B e del punto medio del segmento AB.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
273
§ 7. A.A. 2009-10
(81) In A2 (R) siano P0 , P1 e P2 i tre punti
P0 = (1, 0), P1 = (2, 1), P2 = (2, 2).
(i) Si determinino le coordinate x, y del baricentro Q del triangolo P0 , P1 , P2 .
(ii) Siano u, v le coordinate affini rispetto al riferimento affine P0 , P1 , P2 . Si scrivano u, v in funzione di
x, y.
(iii) Si determinino le coordinate u, v di Q.
−−−−→
(iv) Si scriva l’equazione della proiezione sulla retta P0 P1 parallela alla direzione P0 P2 , nelle coordinate più
convenienti.
(82) Siano A = [1 : 0], B = [0 : i ] e C = [1 : i ] tre punti di P1 (C).
(i) Trovare, se esiste, una proiettività f : P1 (C) → P1 (C) tale che f ( A) = A, f ( B) = B e f (C ) ̸= C.
(ii) Dimostrare che se f : P1 (C) → P1 (C) è una proiettività che fissa almeno tre punti distinti, allora f è
l’identità.
(iii) Determinare se esistono matrici F ⊂ GL(2; C) che inducono una proiettività f = [ F ] : P1 (C) → P1 (C)
con un unico punto fisso.
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
274
#B. TEMI D’ESAME
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
O Binômio de Newton é tão belo como a Vênus de Milo.
O que há é pouca gente para dar por isso.
óóóó—óóóóóó óóó—óóóóóóó óóóóóóóó
(O vento lá fora.)
—
Il binomio di Newton è bello come la venere di Milo.
Peccato che pochi se ne accorgano.
óóóó—óóóóóó óóó—óóóóóóó óóóóóóóó
(Il vento là fuori.)
Poesias de Álvaro de Campos (1935)
Fernando Pessoa (1888–1935)
n
(a + b) =
n ( )
∑
n
k=0
k
ak bn−k
276
Bibliografia
RIFERIMENTI BIBLIOGRAFICI
Testi consigliati
[1] E.Sernesi, Geometria, vol.I-II. Bollati–Boringhieri, 1991,1994,2000.
[2] M.Nacinovich: Elementi di geometria analitica. Serie di matematica e fisica, 1996.
[3] H.S.M.Coxeter: Introduction to geometry. John Wiley and Sons, 1961, 1969, 1989.
In inglese
[4] Chinn, W. G.; Steenrod, N. E.: First concepts of topology. The geometry of mappings of segments,
curves, circles, and disks. New Mathematical Library, Vol. 18. Random House, New York; The L.
W. Singer Co., Syracuse, N.Y. 1966 viii+160 pp.
[5] W.A. Sutherland: Introduction to metric and topological spaces, Oxford University Press, 1975.
[6] B. Mendelson: Introduction to topology, Dover, 1990.
[7] A. I. Kostrikin, Y.I. Manin, Linear algebra and geometry, Gordon and Breach Science Publishers,
1997.
[8] Elmer G. Rees: Notes on geometry, Springer-Verlag Universitext, 1983.
[9] Burn, R. P.: Groups: a path to geometry, Cambridge University Press, Cambridge, 1985.
[10] Michael C. Gemignani: Elementary topology, Dover (2nd ed), 1990.
Complementi
[11] M. Conti, D.L. Ferrario, S. Terracini, G. Verzini: Analisi matematica, Vol I, dal calcolo all’analisi,
Apogeo, 2006.
[12] V. Barutello, M. Conti, D.L. Ferrario, S. Terracini, G. Verzini: Analisi matematica, Vol II, con
elementi di geometria e calcolo vettoriale, Apogeo, 2008.
Approfondimenti
[13]
[14]
[15]
[16]
[17]
[18]
[19]
[20]
[21]
[22]
[23]
[24]
[25]
Michèle Audin: Geometry, Springer Universitext, 2003.
Carlos R. Borges: Elementary Topology and Applications, World Scientific, 2000.
Bredon, G.E.: Topology and Geometry, Springer, 1993.
Gerard Buskes, Arnoud van Rooij, Arnoud C. M. Rooij: Topological spaces: from distance to
neighborhood, Springer UTM, 1997.
V.Checcucci, A.Tognoli, E.Vesentini, Lezioni di topologia generale, Feltrinelli, 1977.
Conforto, F. and Benedicty, M.: Introduzione alla topologia, Roma (1960), pag. 82.
Dieudonné, J: Algebra lineare e geometria elementare. Feltrinelli, 1970.
D.Hilbert and S.Cohn-Vossen: Geometry and the Imagination, Chelsea, 1952.
Hilbert, D. e Cohn–Vossen, S.: Geometria intuitiva: complemento: I primi fondamenti della topologia, di Pavel Sergevic Aleksandrov/ Davide Hilbert e Stefan Cohn–Vossen. Bollati Boringhieri,
2001.
Janich, K.: Topologia, Zanichelli, 1994.
Kosniowski, C.: Introduzione alla topologia algebrica, Zanichelli, 1988.
Singer, I.M. and Thorpe, J.A.: Lecture Notes on Elementary Topology and Geometry, Springer, 1967.
Traduzione in italiano: Lezioni di topologia elementare e di geometria, Boringhieri, 1980.
Stoll, Robert R.: Set theory and logic, (1961).
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
INDICE ANALITICO
A
accumulazione
punto di: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
affine
spazio: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
affinità: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
allineati
punti: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
alternante: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
angoli: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
aperta
funzione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
aperti
di una topologia: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
disgiunti: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
aperto
di uno spazio metrico: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
arco: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
area: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
assioma
delle parallele: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
assiomatica: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
assiomi
del campo dei numeri reali: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
di gruppo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
di Kuratowski: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
di una topologia: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
associativa
operazione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
automorfismo
affine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
azione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
antipodale: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
di gruppi: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
di un gruppo topologico: . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102, 117
fedele: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
transitiva: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
B
base
baricentro: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
di una topologia: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Bolzano-Weierstrass: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
bottiglia
di Klein: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
C
cammino: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
campo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
degli scalari: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
dei coefficienti: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
ordinato: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Cantor, G.: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
carta affine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
Cauchy
successione di: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Cauchy-Schwartz: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
Chasles, M.: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
chiusa
funzione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
chiusi
insieme dei: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
chiuso: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
di uno spazio topologico: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
e limitato: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
insieme: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
chiusura: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14, 19
dei razionali in R: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
di un sottogruppo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
proiettiva: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
classi di equivalenza: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
clopen: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
cofattori
di una matrice: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
compattezza
degli intervalli chiusi di R: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
degli spazi proiettivi: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
compatto
insieme di R: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
per successioni: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
spazio topologico: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
complementare: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
di un aperto: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
di un chiuso: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
complemento: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
complemento ortogonale: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
completezza: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
(non) dei numeri razionali: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
dei numeri reali: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
di Dedekind: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
componenti
connesse: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78, 88
componenti connesse: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
composizione
di funzioni continue: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
277
278
INDICE ANALITICO
congiunzione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
connessione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
degli intervalli: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
dei numeri razionali: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
di Rn : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
connessione per archi
degli aperti connessi di Rn : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
di uno spazio connesso: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
connesso: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
per archi: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
connettivi logici: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
continuità: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6, 46
di funzioni su spazi metrici:. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8
di una funzione tra spazi topologici: . . . . . . . . . . . . . . . . . . . . . . . . 25
continuum: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
contrimmagine
di aperti: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
controimmagine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
di un chiuso: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
di un intorno circolare: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
di un sottospazio affine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
convergenza puntuale: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48, 50
coordinate baricentriche: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
coordinate omogenee: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
coppie ordinate: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
cubo di Hilbert: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
D
denso: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Dedekind: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42, 85
determinante: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
dimensione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
dimostrazione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
dipendenti
punti di uno spazio affine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
disgiunzione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
esclusiva: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
distanza: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
di un punto da un sottoinsieme: . . . . . . . . . . . . . . . . . . . . . . . . . . 163
minima da un piano: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
disuguaglianza
triangolare: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
disuguaglianza triangolare: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
E
enunciato: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
elemento neutro: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
proprietà di un: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
equazione
omogenea: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
omogeneizzata: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
equazioni
cartesiane: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
parametriche: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
equivalenti
metriche: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
equivalenza
proiettiva: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
relazione di: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Erlangen
programma di: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
espressioni
equivalenti: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
logiche: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
estremo
inferiore: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52, 74
inferiore delle distanza: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
superiore: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52, 74
Euclide
quinto postulato: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Eulero: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
F
forma bilineare: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
fibrazione di Hopf: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
formula
di Grassmann: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
formula del parallelogramma: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
funzione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
aperta: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
caratteristica: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
chiusa: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
continua: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6, 19
Gdi un sottospazio affine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
giacitura: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
Grassmann: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
formula di: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Grundlagen der Geometrie:. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43
gruppo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
delle rotazioni del piano: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
delle rotazioni dello spazio: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
delle simmetrie di un quadrato: . . . . . . . . . . . . . . . . . . . . . . . . . . 112
lineare: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94, 111
ortogonale: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
speciale ortogonale: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
topologico: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93, 117
gruppo delle traslazioni: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
H
Heine-Borel: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Hausdorff: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
I
identificazione
di punti in uno spazio topologico: . . . . . . . . . . . . . . . . . . . . . . . . . . 32
identità di Eulero: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
immagine
di un compatto: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41, 46
di un connesso: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
di un intervallo chiuso: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
di una rette con una mappa affine: . . . . . . . . . . . . . . . . . . . . . . . . 142
implicazione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
doppia: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
incidenti: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
indipendenti
punti di uno spazio affine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
indotta: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
insieme: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
aperto: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
chiuso: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
dei laterali: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
delle parti: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
vuoto: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4, 7
insieme quoziente: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
insiemi
complemento: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
279
INDICE ANALITICO
disgiunti: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
inclusionedi: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
intersezione di: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
prodotto cartesiano: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
unione di: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
interno: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
intersezione
di aperti: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
di insiemi: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
di intorni: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
di rette proiettive: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
finita:. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52
intervalli
connessione degli: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
nella retta reale: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
intervallo
di razionali: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
in un insieme ordinato:. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .74
semiaperto: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
intorni
circolari, base: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
intorno: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
circolare: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
in uno spazio topologico: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
inversione
in un gruppo topologico: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
involuzione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
iperpiani affini: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
iperpiano
dei punti impropri: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
proiettivo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
isometria: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
come trasformazione affine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
isomorfismo
affine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
proiettivo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
K
Königsberg (i sette ponti di): . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Klein: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
bottiglia di: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Kuratowski: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
L di un sottogruppo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111, 112
laterali
lineare
funzione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
linearmente dipendenti: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
logica
bivalente: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
dei predicati: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
M
nastro di: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32, 69
Möbius
maggiorante: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
mappa
affine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
diagonale: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
tra spazi topologici: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
mappa di Hopf: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
massimo
di una funzione continua: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41, 62
matrici
invertibili: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
metrica: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
p-adica: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
discreta: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
esempi di: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
euclidea: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
prodotto: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
metriche
equivalenti: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
metrizzabile: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43, 52
spazio topologico: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
minimo
di una funzione continua: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41, 62
minorante: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Ndi Möbius: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32, 69
nastro
negazione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
norma: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
numeri reali: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
numero di Lebesgue: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
O
operazione
omeomorfismo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
binaria: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
orbita: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
orecchini
delle Hawaii: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39, 71
ortogonali: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
ortonormale: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
P
parallela: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121, 128
palla: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
paralleli
sottospazi affini: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
parallelogramma
formula del: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
parte
affine di un sottospazio proiettivo: . . . . . . . . . . . . . . . . . . . . . . . . 183
parti
insieme delle: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
partizione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
piano
affine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
proiettivo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
proiettivo reale: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
piano proiettivo:. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35, 69
postulati: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
preordine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
prodotto
cartesiano di insiemi: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
di matrici: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
di spazi connessi: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
di spazi metrici: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
in un gruppo topologico: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
prodotto scalare: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
proiettività: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
proiettivizzato: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
proiezione
di uno spazio affine su un sottospazio: . . . . . . . . . . . . . . . . . . . . 146
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
280
INDICE ANALITICO
ortogonale: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
prospettica: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188, 194
stereografica: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
sullo spazio delle orbite: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
sullo spazio quoziente: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
proiezione sul quoziente: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
proiezioni: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
proposizione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
punti: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
all’infinito di uno spazio proiettivo: . . . . . . . . . . . . . . . . . . . . . . . 183
di uno spazio affine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
di uno spazio proiettivo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
impropri di uno spazio proiettivo:. . . . . . . . . . . . . . . . . . . . . . . . .183
punto
di accumulazione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13, 19
di uno spazio metrico: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
interno: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6, 18
limite: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13, 19
medio: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
Q
quantificatore
quadrato magico: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
esistenziale: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
univerale: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
quantificatori: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
quaternioni: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
quinto postulato di Euclide: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
R
ratio: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
rapporto: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122, 152
relazione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
di equivalenza: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32, 90
restrizione
di funzioni: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
reticolo
degli interi: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
retrazione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
retta
affine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
rette
parallele: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
proiettive: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
riferimento
affine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
ortonormale: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
riflessione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
parallela ad un sottospazio affine: . . . . . . . . . . . . . . . . . . . . . . . . 146
riflessioni
lungo rette: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
riflessiva: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
rotazioni
gruppo delle: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Russell, B.: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
S
segmento: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135, 150
scalari: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
sezioni
di Dedekind: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
sfera: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
di dimensione 0: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
sghembi:. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .145
simboli
primitivi: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
similitudine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
simmetrie di oggetti: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
sottogruppo
di un gruppo topologico: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
sottoinsieme: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
chiuso di un compatto: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
compatto di uno spazio di Hausdorff: . . . . . . . . . . . . . . . . . . . . . . 45
sottoinsiemi
di uno spazio topologico: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
sottospazi
euclidei ortogonali: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
incidenti: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
sottospazi affini
sghembi: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
sottospazio
affine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
affine generato da punti: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
affine, paralello e passante per un punto: . . . . . . . . . . . . . . . . . 145
proiettivo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
proiettivo generato da punti: . . . . . . . . . . . . . . . . . . . . . . . . . 185, 193
sottosuccessione
convergente: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
di una successione convergente: . . . . . . . . . . . . . . . . . . . . . . . . . . 44
spazi
omeomorfi: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
spazi di funzioni: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
spazio
affine euclideo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
delle orbite: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
di Hausdorff: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
di identificazione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
metrico: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
metrizzabile:. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43
omogeneo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102, 112
proiettivo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
quoziente: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
topologico: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
vettoriale: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
vettoriale euclideo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
spazio affine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
spazio metrico
completo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
spazio vettoriale
euclideo: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
stabilizzatore: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
successione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
convergente: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
convergente in uno spazio metrico: . . . . . . . . . . . . . . . . . . . . . . . . 64
di Cauchy: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41, 64
supporto: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
T
teorema
tautologie: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
del valore intermedio: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
di Bolzano-Weierstrass: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
di Heine-Borel: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60, 62
di Tychonoff: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
topologia
banale: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
definizione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30
281
INDICE ANALITICO
dei complementi finiti: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
di uno spazio affine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
di uno spazio metrico: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
discreta: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
generata dalla base: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
indotta: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
metrica: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
prodotto: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
quoziente: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
toro: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34, 69, 104
totale: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
totalmente disconnesso: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
transitiva: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
trasformazione
affine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
traslazioni: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
insieme delle: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Tychonoff
teorema di: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Udel limite: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
unicità
della parallela per un punto: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
unione
di insiemi: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
di una famiglia di intorni circolari: . . . . . . . . . . . . . . . . . . . . . . . . . . 7
V
valutazione: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
valore di verità: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
variabili: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
verità
tabelle di: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
valori di: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
vettori affini: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
vettori ortogonali
indipendenza lineare dei: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
[http://www.matapp.unimib.it/~ferrario/geo1-2014] : 2014-05-30