Macchine elettriche statiche
Amedeo Andreotti - Simone Falco - Luigi Verolino
2 Macchine elettriche statiche
Indice
Prefazione
Capitolo 1
Generalità sulle macchine elettriche
Capitolo 2
Il trasformatore
Capitolo 3
Conversione dell’energia
Capitolo 4
Pile ed accumulatori
3 Macchine elettriche statiche
Prefazione
In questo testo sono raccolte alcune lezioni sulle macchine elettriche statiche. In
particolare, dopo l’introduzione di alcuni concetti fondamentali, è ampiamente
trattato il trasformatore, sia monofase che trifase, nel secondo capitolo; la
conversione da corrente alternata a corrente continua viene presa in esame nel
terzo capitolo; infine, nel quarto capitolo, viene diffusamente esaminata la
conversione di energia chimica in elettrica, trattando delle pile e degli
accumulatori.
In ogni capitolo vengono offerti al lettore più attento ed interessato spunti di
riflessione ed approfondimento, come, ad esempio, nell’appendice del primo
capitolo in cui viene discussa la definizione di induttore in condizioni quasi
stazionarie.
La conoscenza dei concetti fondamentali relativi ai campi elettici e magnetici è
indispensabile alla comprensione di quanto esposto: si pensi, ad esempio, ai circuiti
magnetici che, in questo testo, vengono utilizzati per modellare il trasformatore, la
cui spiegazione è data per acquisita. Quale riferimento per questa parte
propedeutica si può considerare il volume di Campi elettrici e magnetici di questa
collana.
A. A. - S. F. - L. V.
Settembre 2002
4 Macchine elettriche statiche
Capitolo 1
Generalità sulle macchine elettriche
1.1 Introduzione
1.2 Un po’ di gergo
1.3 Rendimento e perdite
1.4 Un cenno ai materiali
1.5 Principio di funzionamento dei generatori
1.6 Campo magnetico rotante
1.7 Riscaldamento delle macchine elettriche
Appendice: la tensione ai capi di un induttore
Sommario
In questo capitolo tenteremo di capire, seppure per sommi capi, come un
alternatore ed un motore funzionino, quali siano i materiali più di
frequente utilizzati nella costruzione delle macchine elettriche, come si
definisca e si valuti il rendimento e quali strategie si utilizzino per
aumentarlo. Queste sono solo alcune delle domande cui cercheremo di
dare una risposta nel presente capitolo.
5 Macchine elettriche statiche
1.1 Introduzione
Scopo di questo capitolo è capire come funziona un motore elettrico, quali i
princìpi generali che consentono la trasformazione di energia meccanica in
energia elettrica. E poi, che cosa è un alternatore, come si definisce, si valuta
(magari, si incrementa) il rendimento di una macchina elettrica e quali i materiali
più frequentemente utilizzati nelle cosiddette ‘costruzioni elettromeccaniche’.
Come di intuisce, si tratta di argomenti dai quali qualunque studio serio delle
macchine elettriche non può prescindere. Ciò che segue ha, dunque, lo scopo di
fornire qualche informazione di carattere generale, comune a tutte le macchine
elettriche, attirando la vostra attenzione su quelli che vengono chiamati i ‘concetti
di base’, piuttosto che sui dettagli costruttivi. Tenteremo, per grosse linee, di
descrivere il funzionamento dei generatori, anche detti alternatori, e dei motori,
eliminando, però, tutti quei particolari costruttivi, peraltro utilissimi, ma che, se
raccontati a questo stadio di apprendimento, risultano soltanto inutili distrazioni.
Non preoccupatevene troppo, comunque: tutto si chiarirà, pian piano, ... strada
facendo.
Di una cosa, però, siamo sicuri: una macchina elettrica è costituita da opportuni
avvolgimenti, realizzati su ferro. Per questo è stata per noi un’esigenza
irrinunciabile concludere questo capitolo con un’appendice nella quale si definisse
sotto quali condizioni la tensione ai capi di un induttore si può interpretare come
una differenza di potenziale. Vogliamo, in altri termini, discutere quando un dato
avvolgimento possa essere compiutamente descritto per mezzo di un bipolo
induttore che, come certamente ricorderete, ha lo scopo di immagazzinare
l’energia magnetica.
1.2 Un po’ di gergo
Lo studio delle macchine elettriche non può essere adeguatamente intrapreso senza
l’introduzione di alcuni termini che, nel seguito, useremo frequentemente. Senza
alcuna pretesa di spiegare compiutamente i dispositivi e gli apparati che qui
introdurremo, vogliamo iniziare presentando il gergo comunemente adoperato
dagli esperti di macchine elettriche.
In una accezione del tutto generale, chiameremo macchina elettrica un
qualunque apparato che funzioni sulle basi delle leggi dell’Elettromagnetismo e
che sia in grado di convertire energia meccanica in energia elettrica, ovvero di
realizzare la trasformazione inversa, cioè trasformare energia elettrica in energia
meccanica: questa definizione va opportunamente completata aggiungendo nel
novero delle macchine elettriche anche tutti quei dispositivi di modificare il valore
6 Macchine elettriche statiche
oppure le caratteristiche di grandezze elettriche. Per rendere più esplicito quanto
detto, si parla di macchina, senza aggiungere altro, ogni qual volta si ha a che
fare con un dispositivo che realizzi la conversione di energia meccanica, o
qualsiasi altra forma di energia, in energia elettrica: pensate, ad esempio, ai
generatori di tensione che abbiamo introdotto studiando la teoria delle reti; non
sappiamo bene secondo quali trasformazioni energetiche, ma siamo certi che si
tratta di bipoli i quali, a spese di un’altra forma di energia, mettono a disposizione
del circuito a cui sono collegati una certa quantità di energia elettrica. Invece, si
chiama motore un qualsiasi apparato che realizza la conversione duale, quella,
cioè, che trasforma l’energia elettrica in energia meccanica.
Energia meccanica
Macchina
Energia elettrica
Energia elettrica
Motore
Energia meccanica
Figura 1.1: definizione di macchina e motore elettrico.
Le macchine elettriche vengono, poi, tradizionalmente divise in due grandi gruppi:
la macchine statiche e le macchine rotanti.
Le macchine statiche, così dette perché prive di parti in movimento, modificano
il valore della corrente o della tensione alternata forniti in ingresso mantenendo
pressoché inalterato il valore della potenza fornita in ingresso: a questa prima
categoria appartiene, senza dubbio, il trasformatore.
Le macchine rotanti, nelle quali è presente una parte che ruota attorno ad un
asse, appartengono a tre tipi fondamentali: il tipo sincrono, che opera in regime
sinusoidale e la velocità di rotazione è costante; il tipo asincrono, che funziona
sempre in regime sinusoidale con una velocità di rotazione dipendente dal campo
magnetico interno alla macchina e variabile con il carico; il tipo a corrente
continua, che opera in regime stazionario, poiché l’energia viene fornita o
prodottauna
Infine,
in corrente
menzionecontinua.
particolare meritano tre dispositivi che svolgono importanti
funzioni che sono chiarite dalla stessa definizione: il convertitore, che modifica
la frequenza delle grandezze alternate, realizzando una trasformazione della
frequenza del segnale di ingresso oppure trasformando le grandezze alternate in
7 Macchine elettriche statiche
grandezze continue; l’invertitore che trasforma grandezze continue in alternate;
il raddrizzatore che converte grandezze alternate in grandezze, a valor medio
non nullo, da cui si estrae una grandezza continua.
Lo schema che segue riassume in forma grafica la principali classificazioni della
macchine elettriche date in precedenza.
Macchine elettriche
Statiche
Rotanti
Trasformatore
A corrente continua
Motore
Generatore
A corrente alternata
Motore
Generatore
Sincrono
Asincrono
1.3 Rendimento e perdite
I materiali che costituiscono una macchina elettrica sono soggetti a perdite di varia
natura durante il funzionamento: possono essere sia perdite nei conduttori che
costituiscono gli avvolgimenti, tipicamente di rame, sia perdite nel ferro e, nel
caso delle macchine rotanti, perdite meccaniche, per attrito e ventilazione, che
devono essere tenute in debito conto. Tra poco discuteremo dettagliatamente le
perdite elettriche, dedicando solo pochi cenni a quelle meccaniche. Comunque,
siano elettriche o meccaniche, una macchina elettrica è sede di perdite.
• Rendimento
Prima di esaminare queste perdite in qualche dettaglio, però, definiamo il
rendimento.
Ogni apparato (passivo) funziona per effetto di una potenza fornita in ingresso PIN
e restituisce una potenza in uscita PUS, come schematicamente indicato in Figura
1.2. La differenza
8 Macchine elettriche statiche
PASS = PIN - PUS
rappresenta la potenza assorbita dall’apparecchio nel suo funzionamento.
Chiameremo rendimento il rapporto tra la potenza resa in uscita e quella fornita
in ingresso
η = PUS .
PIN
PASS
PIN
Generico
dispositivo
PUS
Figura 1.2: definizione del rendimento.
Questo rapporto, sempre più piccolo dell’unità, può anche essere espresso nelle
due forme equivalenti
PUS
η = PIN - PASS =
,
PIN
PUS + PASS
e nel seguito discuteremo in quali circostanze sia più utile usare l’una o l’altra
forma. È abitudine diffusa introdurre anche il rendimento percentuale, dato da
η % = 100 PUS .
PIN
Diremo, pertanto, che un certo motore ha un rendimento η = 0.82 (o η % = 82%)
intendendo che restituisce l’82% della potenza fornitagli in ingresso. Il rimanente
18% viene perduto sotto forma di perdite elettriche o meccaniche.
Infine, è ovvio che il rendimento è un numero sempre compreso tra zero e uno
0≤η≤1,
9 Macchine elettriche statiche
dato che, essendo il dispositivo passivo, la potenza resa in uscita è necessariamente
più piccola di quella fornita in ingresso.
Uno dei problemi fondamentali che ci impegnerà non poco, durante l’intero studio
delle macchine elettriche, è la messa a punto di tutte quelle strategie che
consentano di aumentare il rendimento di una macchina. E questo, credeteci, non è
un affare semplice ... come avrete modo di constatare, di qui a non molto.
• Perdite nel rame
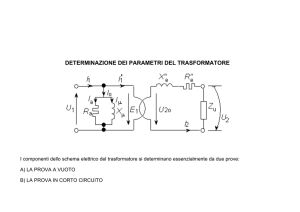
La Figura 1.3 ha lo scopo di ricordare che un conduttore percorso da una
corrente si può approssimare con un resistore.
L
ρ
R=ρL
S
S
Figura 1.3: resistenza associata ad un filo conduttore.
Gli avvolgimenti di una macchina elettrica, che sono dei conduttori tipicamente di
rame (σCu ≅ 58 MS/m), sono, dunque, sede di perdite per effetto Joule,
rappresentabili per mezzo della relazione
PCu = R I2 .
Se siamo in regime stazionario, I rappresenta la corrente che passa attraverso il
resistore; in regime sinusoidale, I rappresenta, invece, il valore efficace della
corrente. Per calcolare il corretto valore di resistenza da inserire in questa
formula, è necessario considerare il numero totale di avvolgimenti sede di perdite,
sia nell’indotto che nell’induttore, numero che dipende dal tipo di macchina,
monofase o trifase. Cosa ciò compiutamente significhi tutto ciò, sarà chiarito più
avanti, tuttavia vale la pena precisare che il circuito induttore (anche detto
circuito di eccitazione della macchina) ha lo scopo di creare il campo magnetico
mediante la circolazione di corrente (anche detta di eccitazione) nei conduttori che
lo costituiscono, mentre il circuito indotto raccoglie le variazioni del campo
magnetico, diventando sede di tensioni e correnti indotte, che, durante il
funzionamento della macchina, contribuiscono a determinare il campo magnetico
complessivo e l’insieme delle azioni esercitate da questo avvolgimento prende il
nome di reazione di indotto.
10 Macchine elettriche statiche
Comunque, nel caso di conduttori di rame funzionanti con una densità di corrente
di 4 A/mm 2, la perdita specifica, intesa come perdita per unità di massa, è pari a
40 W/kg.
• Perdite nel ferro
Un materiale ferromagnetico, che talvolta indicheremo genericamente come
‘ferro’, quando viene immerso in un campo magnetico variabile, finisce per
riscaldarsi. Questo innalzamento di temperatura è sostanzialmente dovuto a due
tipi di perdite:
le perdite per correnti parassite;
le perdite per isteresi.
Prima di esaminare questi due fenomeni dissipativi, diciamo subito che essi
comportano una trasformazione dell’energia del campo elettromagnetico in
energia termica, che si manifesta sotto forma di innalzamento della temperatura
media del materiale. Ora, questa perdita di energia, che non viene utilizzata per
gli scopi per i quali la macchina è stata progettata, produce un eccesso di energia
termica che rappresenta uno dei più grossi problemi per le macchine elettriche,
soprattutto per quelle che devono lavorare per elevati valori di potenza, dato che,
se diventasse troppo sostenuta, potrebbe danneggiare in maniera irreversibile il
comportamento dell’intero apparato. Il buon progetto di una macchina, pertanto,
non può prescindere da un adeguato sistema di raffreddamento che abbia lo scopo
di ‘estrarre’ dalle parti più importanti e delicate del nostro apparato quel calore in
eccesso che potrebbe risultare oltremodo dannoso.
Cerchiamo, allora, di spiegare quali processi fisici sono alla base di queste perdite.
• Perdite per correnti parassite
Consideriamo il cilindro conduttore, di resistività ρ, mostrato in Figura 1.4.
Questo cilindro sia immerso in un campo di induzione magnetica, uniforme nello
spazio e diretto parallelamente all’asse del cilindro, descritto da un’unica
componente che varia, nel tempo, secondo la funzione sinusoidale di pulsazione ω
B(t) = BM sen(ωt) = B 2 sen(ωt) .
In forma simbolica, questa sinusoide si può rappresentare, facendo una
convenzione ai valori efficaci, per mezzo del numero complesso
B(t) → B = B .
11 Macchine elettriche statiche
Fate attenzione a non confondere, nella precedente relazione, il fasore B, che è un
numero complesso, con il vettore B(t), che è un vettore reale.
Immaginiamo che il conduttore sia composto da tanti tubi cilindrici coassiali di
piccolo spessore, che indicheremo con ∆r. Il generico tubo di raggio interno r,
spessore ∆r e lunghezza L, può essere pensato come una spira che si concatena con
il flusso Φ(t) sinusoidale, anch’esso esprimibile in forma simbolica
Φ(t) = π r 2 B(t) → Φ = π r 2 B = π r 2 B .
2r
L
S = π a2
ρ
B(t)
2(r + ∆r)
Figura 1.4: calcolo delle correnti parassite indotte in un cilindro conduttore.
Dalla legge dell’induzione elettromagnetica, o legge di Faraday - Neumann, è noto
che nella spira si induce una forza elettromotrice, ovviamente sinusoidale,
rappresentabile come
e(t) = - d Φ(t) → E = - j ω Φ = - j ω π r 2 B .
dt
Questa forza elettromotrice tende a far circolare una corrente nella spira che
fluisce, dunque, in circuiti circolari coassiali col cilindro. La conduttanza, offerta
dalla spira al passaggio della corrente, ricordando la seconda legge di Ohm, vale
∆G = L ∆r ,
2πrρ
mentre il valore efficace della corrente che circola nella spira, trascurando
l’induttanza della spira stessa, è pari a
∆I = E ∆G = E L ∆r .
2πrρ
12 Macchine elettriche statiche
La potenza attiva ∆P
∆P = E ∆I = E2 ∆G ,
dissipata nella spira per effetto Joule e legata al passaggio di questa corrente, in
forza delle precedenti espressioni, diventa
∆P = π L ω 2 B2 r 3 ∆r .
2ρ
Soffermiamoci un momento a riflettere su cosa abbiamo ottenuto questa potenza:
abbiamo immerso un cilindro conduttore in un campo di induzione magnetica,
uniforme nello spazio e variabile sinusoidalmente nel tempo; nel conduttore, per
effetto del campo elettrico indotto, si è creata una circolazione di corrente,
determinata facendo ‘a fettine’ il cilindro; per ciascuna porzione, dopo averne
valutato la conduttanza, si è calcolato la corrente e, quindi, la potenza in essa
dissipata. Ora, è chiaro che le quantità finite, indicate con la lettera greca ∆,
possono essere considerate indefinitamente piccole, operando la sostituzione
formale della ‘∆’ con la ‘d’. Facciamo ciò allo scopo di integrare rispetto al
raggio, per calcolare la potenza P, complessivamente assorbita dal cilindro:
P = π L ω 2 B2
2ρ
a
0
4
r 3 dr = πL ω 2 B2 a .
ρ
8
Volendo mettere in evidenza la potenza PCP , dovuta alle correnti parassite, anche
dette di Foucault, ed assorbita nell’unità di volume, si può anche scrivere
PCP =
2 2
P = ω 2 B2 a2 , = π2 f BM a2 .
8ρ
4ρ
π a2 L
dove il pedice ‘CP’ sta per correnti parassite. Questa formula mette chiaramente in
risalto che la potenza per unità di volume, assorbita in un conduttore per correnti
parassite, dipende dal quadrato sia della frequenza che del valore efficace del
campo. Formule diverse si possono ricavare per conduttori di forma diversa, ma
la precedente espressione fornisce un’indicazione del modo in cui influiscono sulle
perdite alcuni parametri
13 Macchine elettriche statiche
PCP = kCP B2M f 2 .
La costante kCP , seppur ricavata nel caso particolare di conduttore cilindrico
2 2
kCP = π a = π S ,
4ρ
4ρ
dipende, ovviamente, dal tipo di materiale e dalla geometria che si considera. Si
noti come, mantenendo fissi tutti gli altri parametri, questa costante dipende dalla
superficie della sezione trasversa del conduttore. Ne deriva l’opportunità, quando
è possibile, di sostituire a un unico conduttore un insieme di conduttori, isolati tra
loro per mezzo di una vernice isolante oppure semplicemente dell’ossido che tra
essi si forma, aventi sezione globale equivalente, ma con sezione individuale
ridotta: è molto diffuso l’uso di laminati, anziché di materiali massicci.
Ovviamente la laminazione va effettuata in senso parallelo alla direzione di
magnetizzazione.
B
B
Vernice
isolante
Laminato
Compatto
Figura 1.5: materiale ferromagnetico composto da lamierini sovrapposti.
Lo spessore tipico dei lamierini dipende dalla applicazioni cui sono destinati ma è,
comunque, di pochi millimetri. La Figura 1.5 suggerisce, tra l’altro, un metodo
per realizzare l’impacchettamento dei lamierini.
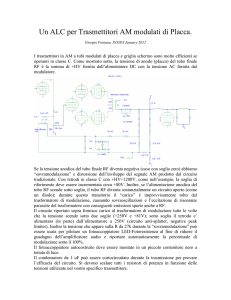
• Perdite per isteresi
Si consideri, poi, il caso, comune in tutte le macchine elettriche, di un circuito
magnetico, costituito da materiale ferromagnetico, sede di flusso variabile
sinusoidalmente nel tempo. Il materiale non solo è dotato di una certa conduttività
che determina, come abbiamo appena visto, la presenza di correnti parassite e,
dunque, di una potenza perduta non trascurabile, ma è anche sede di potenza
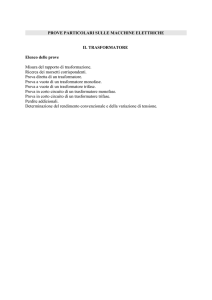
perduta per isteresi. La Figura 1.6 rappresenta un ciclo di isteresi.
14 Macchine elettriche statiche
Uno studio sperimentale, condotto su diversi tipi di materiali ferromagnetici,
mostra che le perdite di potenza attiva PI, per unità di volume, dovute all’isteresi
di un materiale sottoposto a magnetizzazione ciclica alternativa, sono
proporzionali all’area del ciclo di isteresi e possono essere espresse per mezzo
della relazione
PI = kI f B αM ,
dove kI, che dipende dal tipo di materiale, rappresenta un coefficiente che dipende
dal materiale, f è la frequenza, BM è il valore massimo di induzione magnetica ed
α, detto coefficiente di Steinmetz, è un numero reale, compreso tra 1.6 e 2, che
dipende dal valore massimo dell’induzione magnetica e che va determinato
sperimentalmente.
B
0
H
Figura 1.6: ciclo di isteresi.
Approssimativamente si può dire che l’esponente di Steinmetz assume i valori
α=
1.6 ,
per BM < 1 T ;
2,
per BM ≥ 1 T .
• Cifra di perdita
15 Macchine elettriche statiche
Sommando le perdite per correnti parassite e per isteresi, si ottiene la perdita
complessiva nel ferro che, riferita all’unità di volume, vale
PFe = PCP + PI = kCP B2M f 2+ k I f B αM .
Questa formula risulta, tuttavia, di non facile applicazione, data la difficoltà di
calcolo di tutti i parametri presenti, e, per caratterizzare il comportamento di un
determinato materiale riguardo alle perdite, viene spesso utilizzata anche la
cosiddetta cifra di perdita, che rappresenta la potenza perduta in un
chilogrammo di materiale ferromagnetico quando esso è sottoposto a un campo di
induzione sinusoidale, con frequenza di 50 Hz e valore massimo prestabilito di
induzione magnetica (che può essere di 1 T oppure di 1.5 T a seconda dei casi). La
cifra di perdita, espressa in watt al chilogrammo, è quindi il parametro più
significativo a rappresentare in modo sintetico la bontà del materiale sotto l’aspetto
delle perdite; tecnicamente esso è l’unico parametro fornito dai produttori di
materiali magnetici, essendo di scarsa utilità pratica la conoscenza dei vari
coefficienti che compaiono nelle diverse formule, tra l’altro approssimate, utili
essenzialmente per la comprensione dei fenomeni. Informazioni più complete, ma
non molto diffuse, sono i vari diagrammi sperimentali sull’andamento delle
perdite al variare dei parametri più importanti.
Per avere un’idea dell’ordine di grandezza della cifra di perdita, si ricordi che
lamierini di ferro al silicio di spessore (0.35 ÷ 0.5) mm, con tenore di silicio
(0.1 ÷ 5)%, hanno cifre di perdita che vanno da circa 0.8 W/kg, per basso
spessore ed alto tenore di silicio, a circa 3 W/kg, per elevato spessore e basso
tenore di silicio. Attualmente i materiali più usati per le costruzioni
elettromeccaniche hanno cifre di perdita intorno a 1 W/kg.
La cifra di perdita viene generalmente riferita a lamiere nuove; nella valutazione
delle perdite nel ferro si deve tener conto di un aumento di circa il 10% per
l’invecchiamento del materiale e per le lavorazioni meccaniche a cui i lamierini
vengono sottoposti durante le diverse fasi di costituzione dei nuclei magnetici.
Riassumendo, i due tipi di perdite esaminate vengono normalmente indicate come
perdite nel ferro. Esse costituiscono un inconveniente non soltanto per
l’abbassamento del rendimento globale della macchina, ma anche, e soprattutto,
per gli effetti termici connessi con lo sviluppo di calore conseguente. La loro
presenza richiede, pertanto, una serie di provvedimenti, che si possono riassumere
nella laminazione e nell’uso di leghe speciali, che hanno lo scopo di mantenerle
entro limiti economicamente accettabili e che esamineremo, in maggior dettaglio,
più avanti.
16 Macchine elettriche statiche
• Perdite negli isolamenti
Anche negli isolamenti delle macchine elettriche vi sono delle perdite di potenza
attiva, dette perdite dielettriche. Esse sono dovute al fenomeno dell’isteresi
dielettrica che si ha nel funzionamento in corrente alternata: variando con
continuità la polarità della tensione agente su uno strato isolante, si verifica, in
modo analogo a quanto avviene in un condensatore reale, l’inversione ciclica del
verso della polarizzazione delle molecole dell’isolante, con un conseguente
movimento di cariche elettriche che genera una dissipazione di energia elettrica
all’interno dell’isolante. La perdita specifica, per unità di massa, è data dalla
relazione
PDI = ω ε E 2 tan δ ,
d
dove ω è la pulsazione della tensione applicata, ε è la costante dielettrica del
materiale, d rappresenta la sua densità, E è l’intensità del campo elettrico agente
sullo spessore di isolante considerato e tan δ è il cosiddetto fattore di dissipazione
del materiale. Queste perdite dielettriche sono dell’ordine di pochi milliwatt per
chilogrammo, assai più piccole delle perdite specifiche nel ferro, e possono essere
sempre trascurate nel computo della potenza totale perduta da una macchina
elettrica. Invece, esse vanno tenute in debito conto nel dimensionamento degli
isolamenti al fine di evitare che riscaldamenti localizzati pregiudichino l’integrità
dell’isolamento della macchina.
• Perdite meccaniche
La stima delle perdite meccaniche è assai difficile da fare analiticamente a causa
della diversa natura delle stesse e viene, di solito, ricavata in maniera
sperimentale. Comunque, per le macchine rotanti, come i motori asincroni oppure
i generatori sincroni, è necessario considerare le perdite meccaniche, ascrivibili ai
seguenti motivi:
perdite per attrito nei cuscinetti di supporto nell’albero motore, dipendenti dal
peso della parte rotante e proporzionali alla velocità di rotazione;
perdite per ventilazione, dovute essenzialmente all’attrito tra le parti in rotazione e
l’aria circostante, rappresentano il grosso delle perdite meccaniche e sono
proporzionali al cubo della velocità di rotazione;
perdite per attrito tra spazzole e collettore, si verificano nelle macchine, come
quelle a corrente continua, in cui, per stabilire il contatto tra due circuiti elettrici,
17 Macchine elettriche statiche
vengono appoggiate delle spazzole conduttrici fisse su un particolare organo
rotante, detto collettore, e sono proporzionali alla superficie delle spazzole, alla
pressione sulla superficie di appoggio ed alla velocità del collettore.
• Perdite addizionali
Le perdite addizionali sono tutte quelle perdite che si verificano nel
funzionamento di una macchina in aggiunta a quelle principali, cioè a quelle
ohmiche, nel ferro e meccaniche. Sono di difficile valutazione analitica e vengono
determinate sperimentalmente, come differenza tra la potenza totale perduta e la
somma delle perdite principali. La maggior parte delle perdite addizionali è
dovuta all’azione dei flussi magnetici variabili nel tempo su parti metalliche
conduttrici, come le parti strutturali delle macchine, gli alberi meccanici, e così
via. Questi flussi determinano delle correnti parassite e, se la parte interessata ha
anche un comportamento magnetico, dei cicli di isteresi, con conseguente perdita
di potenza attiva.
1.4 Un cenno ai materiali
Diamo, ora, qualche rapida informazione sui più comuni materiali che
costituiscono le varie parti di una macchina elettrica. Di volta in volta, quando ci
tornerà utile, approfondiremo le nozioni contenute in questo paragrafo, che
fornisce, comunque, un quadro generale di riferimento per i materiali.
Una classificazione dei materiali usati nelle macchine elettriche è la seguente:
materiali conduttori;
materiali isolanti;
materiali magnetici.
• Materiali conduttori
I conduttori più comunemente usati per realizzare gli avvolgimenti sono il rame e
l’alluminio. Il primo, come ricorderete, ha una resistività ρCu = 0.01724 µΩm a
20 °C; il secondo presenta una più alta resistività ρAl = 0.0278 µΩm. In entrambi i
casi, dovete sempre tener presente che la resistività è direttamente proporzionale
alla temperatura. Altri materiali conduttori, meno adoperati nelle applicazioni
elettriche, sono l’argento, il bronzo, l’oro e l’ottone.
• Materiali isolanti
Gli isolanti, anche detti anche materiali dielettrici, vengono, d’abitudine,
caratterizzati dalla rigidità dielettrica (V/m) e dalla costante dielettrica ε. Mettendo
18 Macchine elettriche statiche
in risalto ciò che maggiormente interessa per lo studio delle macchine, gli isolanti
solidi per le macchine elettriche sono catalogati in base alla temperatura massima
ammessa, secondo la tabella di seguito riportata.
Classi di
isolamento
Temperatura
massima
Esempi
C
oltre 180°
H
180°
Come la classe B impregnati con resine siliconiche.
F
155°
Come la classe B impregnati con collanti organici.
B
130°
Fibra di vetro, amianto impregnato, mica.
E
120°
Resine poliesteri, triacetato, fibre particolari.
A
105°
Carta, seta, cotone impregnati.
Y
90°
Carta, seta, cotone senza impregnazione.
Mica, porcellana, ceramica, vetro.
Tra gli isolanti liquidi si citano gli oli minerali e alcuni liquidi a base di silicone.
L’uso di questi isolanti ha anche lo scopo di asportare il calore eventualmente
generato durante il funzionamento della macchina.
Tra gli isolanti gassosi si citano l’aria e l’idrogeno.
• Materiali magnetici
Tutti i circuiti magnetici sono costituiti da materiali la cui permeabilità magnetica
è molto elevata. Lo studio dei campi magnetici nella materia mostra che più
elevata è la permeabilità, migliore è l’approssimazione che considera
completamente intrappolato nel materiale il campo di induzione magnetica, in
modo tale che la superficie che delimita la frontiera del materiale magnetico
diventa un tubo di flusso dato che contiene al suo interno tutte le linee del campo
di induzione magnetica B.
I materiali ferromagnetici si possono dividere nelle due seguenti categorie:
materiali dolci, che hanno uno stretto ciclo di isteresi ed un’elevata permeabilità
e vengono utilizzati come nuclei di induttori o di mutui induttori o per ottenere
elevati valori di induzione in campi prodotti da altri elementi; materiali duri,
caratterizzati da un largo ciclo di isteresi ed usati per i magneti permanenti, sono
materiali che consentono di ottenere, in una determinata zona dello spazio, campi
magnetici sufficientemente elevati senza l’intervento di circuiti elettrici.
Questa suddivisione, fatta sulla base delle funzioni che si vuole attribuire al
materiale, non è significativa per materiali con caratteristiche intermedie. Inoltre,
19 Macchine elettriche statiche
al materiale da impiegare in una determinata applicazione possono essere richieste
caratteristiche particolari che, di volta in volta, esamineremo.
Tra i materiali dolci si possono menzionare il ferro ‘dolce’, l’acciaio ‘dolce’, le
leghe dei principali materiali ferromagnetici (ferro, cobalto e nichel) con
materiali non ferromagnetici (alluminio, cromo, rame, manganese, molibdeno,
silicio, tungsteno), o composti chimici chiamati ferriti dolci.
Fra i materiali duri si trovano i vari tipi di acciai temperati e variamente legati
(acciai alnico, cioè legati con alluminio, nichel e cobalti, acciai al tungsteno, acciai
al cobalto) e materiali ceramici sinterizzati (ferriti dure). La sinterizzazione è un
processo termico cui viene sottoposto un sistema di particelle individuali oppure
un corpo poroso, con o senza applicazione di pressione esterna; durante il
riscaldamento, le proprietà del sistema si modificano per la creazione di giunzioni
tra le particelle, riempiendo i vuoti esistenti tra esse.
1.5 Principio di funzionamento dei generatori
È interessante iniziare con una panoramica, anche se incompleta e parziale, del
principio di funzionamento delle principali macchine rotanti. Queste idee
verranno, ovviamente, riprese quando si approfondiranno le singole macchine
rotanti, ma è bene avere da subito un’idea del loro funzionamento.
Per semplificare il problema e consideriamo un avvolgimento, composto da N
spire, posto in rotazione, con velocità angolare costante, attorno ad un asse, in un
campo magnetico uniforme, come mostrato schematicamente in Figura 1.7. L’asse
x - y rappresenta l’asse fisso attorno al quale ruota la spira. Come sappiamo, la
legge dell’induzione elettromagnetica prevede che, proprio a causa di questa
rotazione, nella spira si generi una f.e.m., che come vedremo varia
sinusoidalmente nel tempo. Andando più nel dettaglio, il flusso ϕ(t) collegato ad
una della spire che costituisce l’avvolgimento, vale
ϕ(t) =
B ⋅ n dS = B A cos α = B A cos(ωt) [per una sola spira] ,
SPIRA
avendo indicato con A la superficie della spira. È bene puntualizzare che, nello
schema di Figura 1.8, il campo di induzione è fisso e la spira ruota.
20 Macchine elettriche statiche
asse di
rotazione
B
y
n
spira
α = ωt
B
x
spira in sezione
Figura 1.7: spira rotante in un campo magnetico.
Ciò vuol dire che ruota pure la normale n, solidale con la spira, e questa normale
forma con il campo di induzione magnetica un angolo α, variabile nel tempo. È
facile convincersi che, supponendo costante la velocità angolare di rotazione,
questo angolo valga proprio α = ω t. Per stabilire se avete veramente compreso,
provate a rispondere alla domanda: all’istante t = 0, qual è la posizione relativa del
piano della spira e del campo? Cosa potete dire sulla posizione del versore
normale? Se non siete del tutto convinti, provate ancora in altri istanti.
Allora, moltiplicando per N il valore di ϕ(t) ottenuto per mezzo dell’integrazione,
non è difficile ottenere la f.e.m. complessivamente indotta
e(t) = - d N ϕ(t) = N B A ω sen(ωt) [a tutto l’avvolgimento] .
dt
Questa semplice espressione mostra con chiarezza che una f.e.m. sinusoidale si è
generata ai capi della spira, sempre che la velocità angolare di rotazione sia
costante (dove abbiamo usato questa ipotesi?), di valore efficace
E = 2π f N B A = 2π f N ΦMAX ≅ 4.44 f N ΦMAX ,
2
2
dove ΦMAX = B A rappresenta il massimo valore del flusso che si concatena con la
generica spira dell’avvolgimento e con f = ω/2π la frequenza di rotazione. Nella
pratica, l’avvolgimento è, ad esempio, messo in rotazione da alcune turbine che
trasformano in moto circolare, mettendo in rotazione un albero su cui è calettato
l’avvolgimento stesso, il moto rettilineo dell’acqua di una cascata. Quale che sia il
motore primo, se un avvolgimento ruota a velocità angolare costante in un
campo magnetico, ai suoi capi si potrà raccogliere una f.e.m. sinusoidale.
21 Macchine elettriche statiche
Su questa idea, che approfondiremo studiando la macchina sincrona, si fonda il
principio di funzionamento dei principali generatori sinusoidali, anche detti
alternatori. Senza voler scendere in troppi dettagli, vale la pena sottolineare il
fatto che, nella realizzazione pratica di un alternatore, si preferisce una struttura
duale rispetto a quella descritta, in cui la spira è ferma ed il campo di induzione
magnetica ruota: le formule presentate continuano a valere, dato che ciò che conta
è il moto relativo tra l’avvolgimento ed il campo a creare la f.e.m. indotta.
Inoltre, si tratta di una struttura cilindrica composta di due parti: lo statore, che è
fisso, rappresenta la parte più esterna ed ospita due cave, nella Figura 1.8 a
sezione rettangolare, in cui alloggiano le spire; il rotore, che è mobile, è la parte
più interna e presenta due estremità (dette in gergo espansioni o scarpe polari)
opportunamente sagomate.
Espansione polare
Rotore
Avvolgimento
Cava
ω
ω
Statore
Basamento
Figura 1.8: realizzazione di un alternatore.
Il campo di induzione magnetica creato dal rotore è in moto rigido con esso e si
chiude nel ferro dello statore, presentando un tipico andamento radiale nella
regione del traferro, anche detto interferro, che rappresenta la zona posta in
mezzo ai due tratti di ferro dello statore e del rotore.
1.6 Campo magnetico rotante
Nel paragrafo precedente abbiamo mostrato come si possa realizzare la
conversione di energia meccanica in elettrica. Ora dobbiamo farci un’idea di come
possa avvenire la trasformazione inversa, cioè stiamo per domandarci quale sia il
principio di base secondo cui funzionano i motori elettrici.
22 Macchine elettriche statiche
Iniziamo con una semplice osservazione. Prendiamo in una mano una bussola,
nell’altra un magnete permanente, una calamita. Avviciniamoli ed iniziamo a far
girare il magnete: si osserva che l’ago magnetico della bussola segue il magnete
che è in rotazione, cioè l’aghetto segue il campo magnetico come suggerito in
Figura 1.9.
Domandiamoci: abbiamo costruito, seppure in maniera molto rudimentale e
semplificata, un motore elettrico? La risposta è decisamente no. Abbiamo
semplicemente messo a punto un sistema (trasduttore) che trasferisce l’energia
meccanica impressa al magnete in altra energia meccanica, quella della rotazione
della bussola. Tuttavia, generare un campo magnetico rotante ed avere un rotore
(l’ago della bussola) che segua quest’ultimo è comunque una buona idea per
progettare un motore, a patto di essere capaci di far ruotare il campo magnetico,
in una maniera non meccanica.
N
S
N
S
Figura 1.9: bussola posta in rotazione da una calamita.
In questo paragrafo mostreremo come si possa ottenere un campo rotante per
mezzo di avvolgimenti fermi: sarà una opportuna variazione delle correnti che
circolano nelle spire a fare in modo che il campo magnetico ruoti ed a far
funzionare il motore. Si ricordi che, in ultima analisi, un motore elettrico è un
dispositivo al quale forniamo energia elettrica e dal quale raccogliamo energia
meccanica. Questo è il punto centrale della faccenda su cui si basano tutti i motori,
siano essi asincroni, passo - passo, a collettore, ossia la generazione di un campo
magnetico rotante, che chiameremo anche campo di Ferraris. Vediamo allora
come si generi un campo magnetico rotante, seguendo lo stesso schema che il
grande Galileo Ferraris seguiva nelle sue lezioni: cerchiamo di capire, magari in
maniera semplificata, prima il principio di base, poi vedremo come lo si possano
rigorosamente formalizzare.
23 Macchine elettriche statiche
Consideriamo la spira percorsa da corrente e mostrata in Figura 1.10. Sappiamo
che il campo magnetico da essa sostenuto esibisce un complicato andamento di
linee di forza nello spazio: per rendere più leggibili alcune delle figure che
andremo a fare, rappresenteremo la spira come un sottile conduttore visto in
sezione, mentre del campo riporteremo il solo valore al centro della spira, che è
perpendicolare al piano della spira e vale
B = µ0 N i ,
2a
essendo a il raggio della spira, costituita da N avvolgimenti. Si tratta di una
maniera comoda di rappresentare un campo il cui andamento nello spazio, come
già ricordato, è piuttosto complicato.
B
i(t)
Figura 1.10: schematizzazione del campo magnetico di una spira.
Il campo magnetico generato in corrispondenza del centro geometrico della spira è
diretto secondo l’asse delle spira stessa ed i versi della corrente e del campo
dovranno rispettare, comunque, la regola della mano destra (o del cavatappi, se
preferite).
• Rotazione a scatti
Consideriamo, poi, tre avvolgimenti percorsi dalle correnti i1(t), i2(t), i3(t) ed i
cui assi di simmetria siano disposti secondo angoli relativi di 120° = 2π/3.
Osservate con attenzione la Figura 1.11, divisa in quattro parti: esaminatela
partendo dalla parte in alto a sinistra, dove sono state rappresentate in maniera
schematica i tre avvolgimenti.
Nell’ipotesi di aver fissato un’origine dei tempi, facciamo in modo di far
circolare, diciamo per un secondo, una corrente nella sola spira 1, mentre nelle
altre due non circoli alcuna corrente. Allora, per il primo secondo, il campo di
induzione magnetica sarà rappresentato dal vettore B1. Nell’intervallo 1 < t < 2
24 Macchine elettriche statiche
circoli, invece, solo corrente nella spira 2, mentre le altre due non siano percorse
da corrente. Questa volta il campo di induzione magnetica è rappresentato dal
vettore B2. Infine, per 2 < t < 3, la sola spira alimentata sia la numero 3 e, di
conseguenza, il campo è rappresentato dal vettore B3. Detto ciò facciamo ripetere
ciclicamente questo procedimento. Guardate di nuovo la Figura 1.12 e
ripercorrete in rapida sequenza i tre intervalli di tempo: nel primo secondo, il un
campo magnetico è diretto come B1, nel secondo successivo, si osserva la
scomparsa di B1 e la comparsa del campo B2, nel terzo secondo, si ha la scomparsa
di B2 e la comparsa di B3.
1
1
0<t<1
B1
3
2
1
3
1
1<t<2
B2
3
2
2<t<3
B3
2
3
2
Figura 1.11: campo rotante prodotto da tre avvolgimenti.
Come varia, allora, il campo di induzione magnetica nello spazio?
Il campo ruota, nonostante le spire siano ferme. Certo, non ruota con continuità,
ma a scatti, ma l’idea di fondo sembra promettente. Tra non molto vedremo come
far ruotare con continuità questo campo magnetico. Per il momento
accontentiamoci della conclusione cui siamo giunti: tre avvolgimenti, posti a 2π/3,
alimentati uno per volta da tre correnti, ad esempio costanti nel tempo, che
operino in intervalli temporali differenti, possono creare un campo di induzione
che ruota nello spazio. Ciò era quanto ci premeva di farvi comprendere bene.
Quello che segue è solo qualche conto algebrico che serve ad affinare l’intuizione e
consentire al campo di ruotare con maggiore ... continuità.
25 Macchine elettriche statiche
• Rotazione continua
Torniamo ai tre avvolgimenti e cerchiamo di fare un’analisi un tantino più
accurata. Cominciamo col supporre che le tre spire siano alimentate dalla terna
trifase, simmetrica ed equilibrata, di correnti
i1(t) = I 2 sen(ωt) ,
i2(t) = I 2 sen(ωt - 2π/3) ,
i3(t) = I 2 sen(ωt - 4π/3) .
Ricorderete che questa terna è una terna diretta che gode della proprietà secondo
cui la somma delle tre correnti è, istante per istante, nulla:
i1(t) + i2(t) + i3(t) = 0 , in ogni istante .
La Figura 1.12 riporta i campi sostenuti dalle tre spire; i versi dei tre vettori
riportati danno informazione su come sia stato realizzato l’avvolgimento: il campo
e la corrente su ciascuna spira devono essere accordati secondo la regola del
cavatappi. Per determinare l’andamento temporale del campo sostenuto da
ciascuna spira, è bene innanzitutto ricordare il valore delle funzioni
trigonometriche per gli angoli notevoli:
cos π = - cos 2 π = - cos 4 π = 1 ; sen π = sen 2 π = - sen 4 π = 3 .
3
3
3
2
3
3
3
2
y
1
B2
B3
x
3
2
B1
Figura 1.12: i campi sostenuti dalle correnti nelle tre spire.
26 Macchine elettriche statiche
Detto ciò, ricordando che il campo prodotto da una spira, almeno nel suo centro
geometrico (o pressappoco), è proporzionale alla corrente, possiamo scrivere
B1 = - λ i 1(t) y , B2 = λ i 2(t) - 3 x + 1 y , B3 = λ i 3(t) 3 x + 1 y ,
2
2
2
2
in cui, come ricorderete, la costante
λ = µ0 N
2a
dipende dal numero di spire di cui è costituito l’avvolgimento (andate a rivedere la
formula che descrive il campo di una spira nel suo centro geometrico). Ora, il
campo complessivamente prodotto dalle spire è dato dalla sovrapposizione dei tre
contributi, in formule:
B = B1 + B2 + B3 = λ x
3 i 3(t) - 3 i 2(t) + λ y - i 1(t) + i2(t) + i3(t) .
2
2
2
2
Sviluppiamo con ordine (e pazienza) i diversi calcoli. Il primo addendo,
applicando le formule di addizione del seno, vale
3 i 3(t) - 3 i 2(t) = 3 I 2 sen ωt - 4π - sen ωt - 2π =
2
2
2
3
3
= 3 I 2 - 1 sen(ωt) + 3 cos(ωt) + 1 sen(ωt) + 3 cos(ωt) =
2
2
2
2
2
= 3 I 2 cos(ωt) .
2
Il secondo addendo, invece, sfruttando il fatto che la somma delle tre correnti è
in ogni istante nulla, si può scrivere come
- i 1(t) + i2(t) + i3(t) = - i1(t) - i1(t) = - 3 i 1(t) .
2
2
2
2
Pertanto, il campo totale, valutato nell’origine degli assi, diventa
27 Macchine elettriche statiche
B = 3 λ I 2 cos(ωt) x - 3 λ I 2 sen(ωt) y =
2
2
= 3 λ I 2 x cos(ωt) - y sen(ωt) = B 0 x cos(ωt) - y sen(ωt) ,
2
in cui la costante
B0 = 3 λ I 2
2
è stata introdotta solo allo scopo di alleggerire la notazione. Proviamo a disegnare
il vettore risultante che abbiamo ottenuto per avere un’idea di come evolva nel
tempo. La Figura 1.13 propone di osservare quattro istanti distanziati di un quarto
di periodo T, legato alla pulsazione dalla ben nota relazione:
T = 2π
ω
ovvero ωT = 2π .
y
t=3T
4
t=T
2
raggio = B0
t=0
0
t=T
4
x
verso di rotazione
Figura 1.13: campo magnetico rotante.
L’analisi attenta di questa figura mostra che, applicato nell’origine degli assi,
abbiamo un vettore, che rappresenta l’induzione magnetica e che ruota in verso
orario, il cui estremo si trova su una circonferenza di raggio B0. Si può verificare
in tutta generalità che il campo di induzione magnetica ruota seguendo la
successione delle tre fasi: dalla 1, attraverso la 2, per giungere alla 3.
Detto in altri termini, dalla relazione trovata appare chiaro che l’estremo del
vettore B è dotato di un moto risultante da quello di due moti armonici di uguale
frequenza ed ampiezza, su assi fra loro ortogonali, con fasi differenti di un quarto
di periodo; come è noto dalla cinematica, un tale moto risultante è circolare
28 Macchine elettriche statiche
uniforme e, nel caso in esame, ha verso orario e la sua velocità angolare è ω. Il
vettore B descrive, pertanto, un campo magnetico rotante.
Si è, dunque, verificato che tre solenoidi con assi formanti una stella
simmetrica, percorsi da una terna di correnti equilibrate, danno luogo,
nell’origine degli assi, ad un campo magnetico rotante.
È poi evidente che questa conclusione vale approssimativamente anche per tutti i
punti circostanti l’origine. Vale la pena notare, infine, che, se due qualunque delle
tre correnti sinusoidali vengono scambiate fra loro, il verso di rotazione del
campo magnetico rotante si inverte, mantenendo inalterata la sua intensità. Per
dimostrare ciò, basta ripetere i calcoli sviluppati in precedenza scambiando fra
loro, ad esempio, gli avvolgimenti 2 e 3.
• Campo rotante bifase
Un’ultima osservazione prima di concludere questo capitolo introduttivo. La
relazione appena trovata
B = B 0 x cos(ωt) - y sen(ωt) ,
suggerisce pure un’altra maniera di realizzare un campo magnetico rotante. Il
campo risultante B risulta dalla composizione di due campi, uno diretto secondo
l’asse x del riferimento scelto, l’altro diretto come l’opposto dell’asse y.
y
j2(t)
j1(t)
x
j1(t)
j2(t)
Figura 1.14: campo rotante bifase.
Sapete già che il moto circolare uniforme può ottenersi dalla composizione di due
moti armonici, di uguale pulsazione ed ampiezza, sfasati di π/2, il primo che si
29 Macchine elettriche statiche
sviluppa lungo un certo asse, l’altro lungo un altro asse ortogonale al primo.
Pertanto, è pensabile di utilizzare due spire, alimentate dalle due correnti
j1(t) = I 2 cos(ωt) , j2(t) = I 2 cos(ωt + π/2) = - I 2 sen(ωt) ,
indicate con ‘j’ per non confonderle con le precedenti, la prima che crea un campo
di induzione magnetica diretto lungo l’asse x, la seconda che sostiene un campo di
induzione magnetica diretto lungo l’asse y (a parte il segno). In questo caso, come
mostrato in Figura 1.14, non essendo più sostenuto da un sistema di correnti
trifasi, il campo rotante viene detto bifase.
1.7 Riscaldamento delle macchine elettriche
Le varie perdite, che accompagnano la trasformazione di energia che avviene in
una macchina elettrica, danno luogo a due effetti negativi: oltre all’impoverimento
del flusso di energia determinano anche un riscaldamento delle parti ove si
manifestano. Le perdite risultano tanto più elevate, quanto più elevata è la potenza
erogata dalla macchina: da ciò segue un limite superiore a tale potenza in rapporto
alle caratteristiche costruttive e di dimensionamento della macchina stessa, non
dovendosi mai raggiungere temperature eccessive in corrispondenza delle parti
isolanti.
Questa limitazione è dovuta al degradamento delle caratteristiche meccaniche ed
isolanti che ogni dielettrico subisce durante il riscaldamento. La vita di un
materiale isolante è definita proprio come il periodo di tempo durante il quale le
sue caratteristiche permangono superiori ad un limite, al di sotto del quale non
può essere più considerato idoneo alla sua funzione. Prove sperimentali mostrano
che essa è tanto più breve, quanto più alta è la temperatura, secondo la legge
sperimentale
vita media degli isolanti → A exp(B/T) ,
dove A e B sono costanti caratteristiche del materiale e T è la temperatura assoluta
di esercizio. Discende che si potrà tollerare una temperatura di funzionamento
elevata, a patto di accettare una vita breve dell’apparecchiatura. Ad esempio, nel
caso dei missili propulsori spaziali, la vita richiesta è di pochi minuti e, pertanto, i
materiali potranno essere assoggettati ad elevatissime temperature, sempre
limitatamente alla loro infiammabilità o passaggio di stato. Le comuni macchine
elettriche sono, invece, destinate a funzionare per decine di anni e tale deve essere
la vita richiesta dei materiali isolanti: per questo, le norme CEI classificano i
30 Macchine elettriche statiche
materiali isolanti in varie classi, per ognuna delle quali vengono stabiliti i limiti di
temperatura ammessi.
La determinazione della temperatura delle diverse parti di una macchina elettrica
durante il suo funzionamento è un problema assai complesso, che esula dai limiti
impostici in questa trattazione. Tuttavia, al fine di discutere alcuni aspetti di
principio, si prenda in esame il semplice problema del riscaldamento di un corpo
omogeneo, dotato di conducibilità interna molto grande, tanto da poter
considerare che tutti i suoi punti siano alla stessa temperatura. Si supponga ancora
che all’interno di esso venga dissipata una certa potenza producendo un uguale
flusso di calore Q. Se il corpo fosse termicamente isolato dall’ambiente
circostante, il flusso Q produrrebbe un innalzamento continuo della temperatura
del corpo (riscaldamento adiabatico). In un generico intervallo di tempo ‘dt’, si
può scrivere la seguente equazione di bilancio
Q dt = M c dT ,
in cui M rappresenta la massa del corpo, c è la sua capacità termica d ‘dT’
l’aumento di temperatura nel tempo elementare ‘dt’. Detta allora T A la
temperatura dell’ambiente, temperatura che all’istante iniziale possiede il corpo,
integrando la precedente relazione, si otterrebbe
T = TA + Q t ,
Mc
cioè una temperatura che aumenta linearmente con il tempo.
In pratica, gli scambi con l’ambiente circostante non sono nulli ed una parte del
calore prodotto nel corpo viene ceduta all’ambiente esterno: questa cessione di
calore è tanto più elevate, quanto più è grande la temperatura del corpo rispetto
all’ambiente. Ciò comporta che, se il flusso Q è costante, si raggiungerà una
temperatura T MAX per la quale tutto il calore prodotto viene ceduto all’esterno. In
altri termini, il bilancio termico va corretto secondo la relazione
Q dt = M c dT + k S (T - TA) dt ,
dove ‘k’ è il coefficiente di dispersione termica attraverso la superficie esterna ‘S’
del corpo in esame. Nella ipotesi di Q costante, l’andamento della temperatura in
funzione del tempo è dato dalla relazione esponenziale
31 Macchine elettriche statiche
T = TA + Q 1 - e-t/τ ,
kS
avendo introdotto, per brevità, la costante di tempo termica
τ=Mc.
kS
La costante termica dipende soltanto dalle caratteristiche fisiche e geometriche e
caratterizza il comportamento durante i transitori di raffreddamento o di
riscaldamento: le variazioni di temperatura sono tanto più rapide, quanto minore è
la costante termica.
La massima temperatura raggiunta si ottiene, infine, nel limite di tempi molto
grandi e vale
T MAX = TA + Q ,
kS
come suggerisce la Figura 1.15.
T MAX
T = TA + Q 1 - e-t/τ
kS
T = TA + Q t
Mc
TA
t
τ
0
1
2
3
4
5
Figura 1.15: transitorio termico di riscaldamento.
32 Macchine elettriche statiche
Appendice: la tensione ai capi di un induttore
È noto che, in condizioni stazionarie, l’integrale del campo elettrico lungo una
generica linea non dipende dalla linea, ma soltanto dai suoi estremi: per questo, a
suo tempo, questo integrale venne chiamato differenza di potenziale. Sappiamo
pure che, in condizioni variabili nel tempo, ciò non è più vero e la tensione non
può porsi nella forma di una differenza di potenziale. In altri termini, la tensione
dipende, oltre che dagli estremi, dalla linea che li congiunge. Sotto opportune
condizioni, che studieremo in questa appendice, è possibile introdurre una
differenza di potenziale anche se siamo in presenza di campi variabili.
Consideriamo un avvolgimento di N spire, come potrebbe essere quello
schematizzato in Figura A.1, di estremi A e B, sottoposto ad un campo magnetico
di induzione magnetica, lentamente variabile nel tempo, B(t).
B(t)
n
τ
A
Γ AVV
Γ0
Γ1
Γ2
B
Figura A.1: avvolgimento in un campo lentamente variabile nel tempo.
L’avverbio lentamente ci ricorda che possiamo trascurare i fenomeni di corrente
di spostamento, ma dobbiamo tenere in conto i fenomeni di induzione
elettromagnetica, e, quindi, scrivere l’equazione di Ampère - Maxwell nella forma
semplificata
B ⋅ τ dl = µ0 I Γ ,
Γ
in cui IΓ è la corrente che si concatena con la linea chiusa Γ, descritta dal versore
τ, ed abbiamo trascurato il termine che descrive la corrente di spostamento.
33 Macchine elettriche statiche
Applichiamo la legge di Faraday - Neumann, conosciuta anche come legge della
induzione elettromagnetica, alla linea chiusa di Figura A.1, costituita
dall’avvolgimento che forma la spira e da un tratto ideale esterno all’avvolgimento
che serve per collegare i morsetti. Vogliamo dimostrare che, in realtà, nelle
ipotesi in cui ci siamo messi, la tensione lungo una generica linea, che colleghi
all’esterno dell’avvolgimento i due morsetti, è indipendente dalla linea stessa. Se la
linea è scelta opportunamente, contrariamente a quello che ci si poteva aspettare,
anche in condizioni variabili nel tempo, purché lentamente, possiamo continuare a
dire che la tensione ai morsetti dell’avvolgimento è una differenza di potenziale.
Tentiamo di capirne la ragione.
I morsetti A e B sono collegati per mezzo di tratti matematici (fittizi) di linea che
partono da B e giungono fino ad A, i quali contribuiscono, insieme
all’avvolgimento, che è reale, a formare una linea chiusa, che indicheremo con Γ.
Questa linea chiusa è, dunque, costituita dall’unione della linea Γ AVV, che
rappresenta l’avvolgimento, e dalla linea Γ 0, Γ 1 oppure Γ 2, genericamente Γ k,
rappresentante la parte esterna:
Γ = Γ AVV + Γ k .
La legge dell’induzione elettromagnetica, applicata all’intera linea Γ, impone che
la circuitazione del campo elettrico sia pari proprio all’opposto della derivata nel
tempo del flusso concatenato con la linea chiusa Γ:
E ⋅ τ dl = - d ΦΓ .
dt
Γ
Il segno meno è legato al fatto che la superficie SΓ, che si appoggia alla linea Γ, si
suppone orientata in modo congruente con quello assunto per Γ, rispettando la
regola della ‘mano destra’. Si noti che ΦΓ rappresenta il flusso del campo
magnetico che si concatena con la strana superficie a chiocciola di forma elicoidale
che ha la linea chiusa Γ come orlo.
Detto ciò, l’integrale di linea presente in questa equazione può essere scomposto in
due parti:
E ⋅ τ dl =
Γ
E ⋅ τ dl +
A-ΓAVV-B
E ⋅ τ dl .
B-Γk -A
34 Macchine elettriche statiche
Al secondo membro si deve rispettare il verso di integrazione e ciò comporta che,
per il primo addendo, si parta da A, si integri lungo Γ AVV per terminare in B,
mentre, per il secondo addendo, si parta da B, si integri nel tratto di linea esterna
Γ k, e poi si giunga nel punto A. Ora, dato che stiamo supponendo che
l’avvolgimento sia fatto di materiale buon conduttore, la cui resistività, come è
noto, tende a zero, per la legge di Ohm alle grandezze specifiche
E=ρJ,
si capisce che il campo elettrico E in ogni punto interno del conduttore, essendo
proporzionale alla densità di corrente secondo il coefficiente di resistività ρ, è
trascurabile. Quindi, tanto più un conduttore approssima il suo comportamento a
quello di conduttore ideale, tanto più sarà vero che nei punti interni ad esso, il
campo elettrico dovrà essere trascurabile. Sotto tale ipotesi, il primo integrale a
secondo membro degli addendi in cui abbiamo scomposto la circuitazione del
campo elettrico, dato che si sviluppa entro il conduttore, sarà trascurabile e
l’unico contributo deriva dal cammino all’aperto, che si sviluppa in aria, esterno
all’avvolgimento:
E ⋅ τ dl =
Γ
E ⋅ τ dl .
B-Γk -A
Ritornando alla legge dell’induzione elettromagnetica, avendo stabilito che l’intera
circuitazione del campo E è pari semplicemente alla tensione del campo elettrico
lungo una qualunque linea esterna al conduttore che colleghi i terminali A e B,
possiamo scrivere
E ⋅ τ dl = - d ΦΓ .
dt
B-Γ -A
k
Nelle condizioni in cui ci siamo messi, la variazione temporale, cambiata di segno,
del flusso concatenato con l’intera linea chiusa Γ è pari alla tensione del campo
elettrico lungo una linea generica Γ k che congiunge all’esterno il punto B con il
punto A. Inoltre, cambiando il verso di orientazione di Γ k, cambia anche il segno
dell’integrale
35 Macchine elettriche statiche
E ⋅ τ dl = + d ΦΓ .
dt
A-Γ -B
k
La domanda centrale del nostro discorso è la seguente: cosa succede se cambiamo
la linea Γ k che collega i due morsetti A e B?
Per rispondere a questa domanda calcoliamo il flusso del campo di induzione
magnetica concatenato con l’intera linea chiusa Γ, che può immaginarsi
decomposto in due contributi, Φ1 e Φ2:
ΦΓ = Φ1 + Φ2 .
La parte Φ1 rappresenta il flusso attraverso la superficie a spirale (se preferite, a
chiocciola) che costituisce le N spire, mentre Φ2 è il flusso attraverso la superficie
piana ABCD. Si noti, per inciso, che, in Figura A.2, il verso della normale alla
superficie e l’orientamento della linea di contorno rispettano, come d’abitudine, la
regola della mano destra.
B(t)
n
A
D
Γ AVV
Γk Γ2
B
C
Figura A.2: calcolo del flusso sulla superficie dell’avvolgimento.
Valutiamo, allora, questi due contributi.
Il primo, Φ1, sarà pari alla somma di tutti i flussi (ϕ k) attraverso le singole spire
della superficie a chiocciola:
Φ1 = ϕ 1 + ϕ 2 +
+ ϕN .
Ci si convince facilmente che, su spire sottili e fittamente avvolte, gli N flussi ϕ k
sono tutti uguali tra loro e, pertanto, quest’ultima relazione diventa:
36 Macchine elettriche statiche
Φ1 = N ϕ .
Se poi lungo il piano di una generica spira, rappresentato da solo in Figura A.3,
assumiamo che il campo di induzione magnetica sia grossomodo uniformemente
distribuito e pressoché perpendicolare all’area della superficie, come accade nel
caso di un solenoide molto lungo, il flusso ϕ relativo alla generica spira sarà pari a
ϕ ≅BS.
B(t)
n
Figura A.3: flusso sulla generica spira dell’avvolgimento.
Detto ciò, è chiaro che il flusso complessivo, relativo all’intera superficie a
spirale, può scriversi come
Φ1 ≅ N B S .
Vediamo, ora, quanto vale l’altro contributo Φ2. Esso può essere valutato come
Φ2 = B S ⊥ ,
dove S⊥ rappresenta l’area della proiezione della superficie mistilinea ABCD sul
piano perpendicolare al vettore induzione magnetica, e, come vedremo tra un
momento, deve avere un valore dello stesso ordine di grandezza dell’area di una
singola spira, non potendo, cioè, diventare arbitrariamente grande.
Confrontando i due valori di Φ1 e Φ2, si ha
Φ1 = N B S = N S .
Φ2
B S⊥
S⊥
Quello che è importante osservare è che, se le due superfici S ed S⊥ sono dello
stesso ordine di grandezza, il rapporto tra i flussi dipende solo dal numero di spire
N. Allora, se il numero delle spire è sufficientemente grande, Φ2 risulterà
37 Macchine elettriche statiche
certamente trascurabile rispetto a Φ1 ed il flusso totale concatenato con la linea Γ è
pressoché uguale al solo flusso relativo alla superficie a chiocciola
ΦΓ = Φ1 + Φ2 ≅ Φ1 ≅ N B S .
ed il flusso ΦΓ non dipende dalla particolare linea Γ k che abbiamo usato per
collegare i morsetti del solenoide. Ricordando che la tensione lungo la linea Γ k è
pari alla derivata nel tempo del flusso di ΦΓ, il quale non dipende dalla particolare
linea, non dipenderà dalla linea neppure la sua derivata, che coincide proprio con
la tensione ai capi A e B. Se ne conclude che la tensione del campo elettrico
E ⋅ τ dl = TAB
T A-Γk -B =
A-Γk -B
non dipende dalla linea Γ k che congiunge i morsetti A e B e che, nelle ipotesi di un
campo di induzione magnetica lentamente variabile nel tempo, tale tensione può
essere considerata come una differenza di potenziale, tra il potenziale del morsetto
A e quello del morsetto B
T A-Γk -B = TAB = vA(t) - vB(t) .
Ogni volta che si considera un circuito come il precedente, sia esso avvolto in aria
o su materiale ferromagnetico, si potrà legittimamente affermare che ai suoi capi
si stabilisce una tensione v(t) variabile nel tempo, indipendente dal cammino usato
per congiungere i suoi estremi, cioè una differenza di potenziale, pari a
v(t) = d ΦΓ = vA(t) - vB(t) .
dt
Non è difficile convincersi che, anche se cambia il verso della corrente, scegliendo
sempre l’orientamento della normale secondo la regola della mano destra applicata
alla linea Γ, quest’ultima relazione resta comunque valida.
38 Macchine elettriche statiche
Capitolo 2
Il trasformatore
2.1 Introduzione
2.2 Il trasformatore ideale
2.3 Accoppiamento mutuo
2.4 Accoppiamento su materiale ferromagnetico
2.5 Modelli semplificati del trasformatore
2.6 Un cenno agli effetti non lineari
2.7 Condizioni e valori nominali
2.8 Rendimento
2.9 Prove sui trasformatori
2.10 Caduta di tensione
2.11 Trasformatori in parallelo
2.12 Autotrasformatore
2.13 Notizie sulla costruzione
2.14 Trasformatori per usi speciali
2.15 Trasformatori trifasi
2.16 Dati di targa
39 Macchine elettriche statiche
2.17 La diagnostica
2.18 Simboli grafici
Appendice: sforzi elettrodinamici negli avvolgimenti
Sommario
Una notevole distanza intercorre, spesso, tra il luogo in cui l’energia
elettrica viene prodotta (la centrale) e quello in cui viene utilizzata
(officine, case, vie cittadine). Questo collegamento viene realizzato per
mezzo di lunghi cavi, detti linee di trasmissione, che, per quanto
costituiti da buoni conduttori, trasformano comunque una parte
dell’energia che trasportano in calore. Se il valore della corrente
circolante lungo le linee fosse elevato, avremmo potenze perdute in linea
non trascurabili: si deve individuare una soluzione che le riduca.
40 Macchine elettriche statiche
2.1 Introduzione
Il trasformatore è una macchina elettrica che consente di innalzare ed abbassare, in
maniera efficiente e senza eccessive perdite, il valore della tensione. Trattandosi di
una macchina elettrica statica, cioè senza parti in movimento, presenta rendimenti
elevatissimi, fino al 99%, come specificheremo meglio nel seguito. Esiste sia nella
versione monofase, sia in quella trifase. Ma che cos’è un trasformatore?
Si tratta sostanzialmente di un doppio bipolo, il cui simbolo circuitale è mostrato
in Figura 2.1.
i1(t)
+
i2(t)
+
v1(t)
−
v2(t)
−
i1(t)
i2(t)
Figura 2.1: simbolo circuitale del trasformatore.
Certamente ricorderete che ciò che definiva un doppio bipolo era il concetto di
porta e la corrente che entra in una delle due porte è uguale a quella che esce. Se,
ad esempio, il doppio bipolo è lineare e puramente resistivo, la tensione ai capi di
ciascuna porta è definita dalle relazioni
v1 = R 11 i 1 + R 12 i 2 ,
v2 = R 21 i 1 + R 22 i 2 ,
che mostrano chiaramente che non basta definire la corrente e la tensione ad una
sola porta per studiarne il funzionamento, come invece accadeva per il semplice
bipolo. Queste relazioni sono soltanto un modo di assegnare le caratteristiche:
dovreste ricordare espressioni quali rappresentazioni in termini di conduttanze,
rappresentazione ibrida o di trasmissione. Come, poi, si descriva il doppio bipolo
‘trasformatore’ lo impareremo pian piano procedendo nella lettura. In questo
capitolo, infatti, partendo dal più semplice modello di trasformatore, quello ideale,
procederemo per ... successive complicazioni. Ciò vuol dire che introdurremo,
man mano che la trattazione avanzerà, sempre maggiori elementi che avvicinano i
nostri modelli alla realtà sperimentale. In questo studio ritroveremo (ed
41 Macchine elettriche statiche
approfondiremo) vecchie conoscenze come il doppio bipolo accoppiamento mutuo,
che abbiamo introdotto come doppio bipolo durante lo studio dei circuiti.
A cosa serve un trasformatore?
Per rispondere compiutamente a questa domanda, dobbiamo capire per quale
motivo ci interessa così tanto cambiare a nostro piacimento il valore della tensione
e ciò è intimamente legato al ruolo che un trasformatore svolge nel complesso
meccanismo della trasmissione e della distribuzione dell’energia elettrica.
A1 = A2
I1
I2
A2 = A3
I3
G
V1
T1
V2
V2
T2
T3
V3
A → potenza apparente
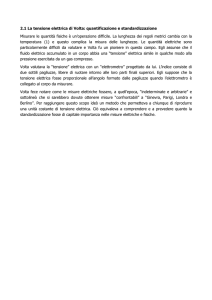
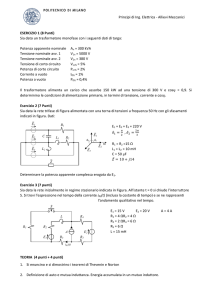
Figura 2.2: trasmissione dell’energia elettrica da una centrale alle varie utenze.
Osservate con attenzione la Figura 2.2: essa rappresenta quello che in gergo
tecnico si chiama diagramma unifilare e di cosa si tratti lo comprenderete fino in
fondo quando studieremo gli impianti elettrici. Per il momento ci basti intuire che
stiamo studiando uno schema in cui è presente una centrale elettrica, indicata con
G, due trasformatori, indicati con i cerchi che si incrociano e tanti carichi, detti
anche utenze, quali possono essere le nostre case o gli impianti industriali, indicati
con le freccette terminali. Notate come tra i vari carichi, lungo la seconda linea
dall’alto, vi sia anche un altro trasformatore. Cerchiamo di comprendere la
funzione dei due trasformatori T 1 e T 2.
Il primo trasformatore eleva la tensione V1 fino al valore V2. Dovendo essere
costante la potenza apparente (per quel che diremo più compiutamente nel seguito
del capitolo), ciò comporta che la corrente I1 è più grande della I2. Il secondo
trasformatore, invece, abbassa la tensione da V2 a V3, elevando al tempo stesso la
corrente da I2 a I3. Allora, l’energia elettrica, che viene prodotta a tensione
intermedia per motivi che vi saranno chiariti più avanti, viene innalzata per essere
inviata sulle linee di trasmissione dell’energia: questo innalzamento della tensione
serve a ridurre la corrente che passa attraverso i conduttori, allo scopo di
abbassare le perdite per effetto Joule. Le linee per la trasmissione dell’energia
possono essere anche molto lunghe, dato che non è raro riscontrare che il luogo di
42 Macchine elettriche statiche
produzione dell’energia sia piuttosto lontano da quello di utilizzazione. Quando poi
l’energia debba essere fornita alle utenze, civili o industriali, la tensione viene
abbassata ulteriormente da un secondo trasformatore poiché, per motivi di
sicurezza, è meglio fornire agli utenti energia elettrica in bassa tensione.
Oggigiorno, si è trovato che nelle centrali conviene produrre l’energia elettrica a
tensioni dell’ordine della decina di chilovolt, ad esempio 15 kV. Nelle grandi linee
di trasporto conviene utilizzare tensioni dell’ordine delle centinaia di chilovolt:
tipico esempio 380 kV. Nelle sedi di utilizzazione conviene disporre di tensioni
dell’ordine delle centinaia di volt, tipicamente 220 V o 380 V. Addentrarsi nelle
ragioni di carattere tecnico ed economico di questa scelta convenienze sarebbe
troppo lungo e forse impegnativo. Produzione, trasmissione e distribuzione
dell’energia sono i tre capitoli fondamentali della scienza e tecnica degli impianti
elettrici, il cui sviluppo è strettamente legato a importantissime questioni di
convenienza economica e di sicurezza.
Solo a titolo di curiosità facciamo un cenno alla scelta dei valori più convenienti
per le tensioni nelle linee di trasmissione. Per una data potenza elettrica, il costo
dei conduttori decresce se si abbassa il valore della corrente, e, perciò, se si
innalza la tensione. Il costo dell’isolamento (isolatori veri e propri, distanziamento
tra i conduttori, altezza da terra) cresce, invece, se si innalza la tensione. La
somma di questi due costi, che rappresenta il costo totale di primo investimento
della linea, ha dunque un valore minimo al variare della tensione, ed il valore
della tensione che corrisponde al costo minimo è proprio delle centinaia di
migliaia di volt, per una potenza trasportata intorno ai 100 MW. Il costo di
gestione di una linea in alta tensione, invece, non dipende dal livello di tensione di
funzionamento sia esso 150 kV, 220 kV oppure 380 kV. Negli alternatori delle
centrali la questione dell’isolamento incide in misura più forte: ciò spiega il minor
valore ottimo che si ha per la tensione in sede di produzione. Presso le sedi di
utilizzazione, infine, è il fattore sicurezza a limitare fortemente il valore
conveniente per la tensione, che si riduce, come già detto, a poche centinaia di
volt.
Riassumendo, l’energia elettrica viene prodotta a media tensione, trasmessa ad alta,
smistata agli utenti in bassa. Forse non sapete neppure il significato preciso di alta,
media e bassa tensione; siamo, tuttavia, certi che avete intuito il senso di ciò che
volevamo dire e questo basta ... per il momento!
2.2 Il trasformatore ideale
Per definire con completezza il trasformatore, inizieremo con un modello
semplice, detto trasformatore ideale, privo di tutte le complicazioni dei
43 Macchine elettriche statiche
trasformatori reali, complicazioni che aggiungeremo poco per volta nei paragrafi
che seguono.
i1(t)
a:1
i2(t)
+
+
v1(t)
v2(t)
−
−
Figura 2.3: trasformatore ideale.
Il simbolo circuitale che comunemente si usa per indicare un trasformatore ideale
è mostrato in Figura 2.3. Fate attenzione alle convenzioni adottate alle due porte:
per entrambe si è fatto uso della convenzione dell’utilizzatore. Le relazioni che
definiscono questo nuovo doppio bipolo sono:
v1(t) = a v2(t) ,
i2(t) = - a i1(t) .
Cosa rappresenti il parametro ‘a’, un numero reale che può avere segno qualsiasi,
vi sarà chiaro più avanti: ciò che ci interessa sottolineare è che esso è l’unico che
serve a definire il doppio bipolo, descritto dalle relazioni precedenti, che, a suo
tempo, sono state indicate come caratteristica ibrida. Il segno meno nella seconda
equazione è dovuto alle convenzioni scelte alle due porte.
Vale la pena notare subito che il trasformatore ideale, a differenza di quello reale,
funziona anche in corrente continua: nelle relazioni assegnate, infatti, il tempo
compare come un parametro che, in regime stazionario, scompare. Ora, nel
trasformatore reale, la creazione di una f.e.m. indotta è legata alla legge di
Faraday - Neumann e richiede, pertanto, un regime di grandezze variabili. Un
piccolo dettaglio che, però, fa una grande differenza.
Cominciamo ad analizzare il significato del parametro ‘a’. Si può dire che,
ammettendo per semplicità di utilizzare tensioni di porta positive,
se |a| < 1, poiché v1(t) < v2(t), si avrà un trasformatore elevatore;
se |a| > 1, poiché v1(t) > v2(t), si avrà un trasformatore abbassatore.
44 Macchine elettriche statiche
In altri termini, se |a| < 1, passando dalla porta primaria a quella secondaria, la
tensione aumenta (e la corrente, in valore assoluto, diminuisce). Se, invece, |a| > 1,
passando dalla porta primaria a quella secondaria, la tensione diminuisce (e la
corrente, in valore assoluto, aumenta). Tuttavia, sia nel caso di innalzamento che
di abbassamento della tensione, il trasformatore ideale è trasparente alla
potenza: ciò vuol dire che non ha luogo alcun assorbimento di energia nel
trasformatore e tutta l’energia fornita alla prima porta si ritrova alla seconda
porta. Questa proprietà si verifica facilmente. La potenza istantanea assorbita da
un doppio bipolo
p(t) = v1(t) i1(t) + v2(t) i2(t) ,
in forza della definizione data di trasformatore ideale, diventa
p(t) = v1(t) i1(t) - v1(t) a i 1(t) = 0 .
a
Si è soliti riassumere questo risultato dicendo che il trasformatore ideale è
trasparente per le potenze. Inoltre, appare ora ancora più evidente che, nel passare
dalla porta primaria a quella secondaria, se il trasformatore è elevatore, aumenta
il valore della tensione ma diminuisce, in valore assoluto, quello della corrente.
Viceversa, se il trasformatore è abbassatore, la tensione diminuisce e la corrente,
in modulo, aumenta.
Esaminiamo ancora la Figura 2.4 e tentiamo di capire come viene ‘vista’ la
resistenza R, che chiude la porta secondaria. La definizione (2.2) resta sempre
vera, ed allora i2(t) = - a i1(t). Se osserviamo che v2(t) = - R i2(t) (il segno meno è
dovuto al fatto che sul resistore abbiamo la convenzione del generatore), si avrà
v1(t) = a v2(t) = - a R i2(t) = - a R - a i1(t) = a 2 R i 1(t) .
Si capisce, allora, che l’avere posto una resistenza alla porta secondaria viene
visto, dalla porta primaria, come una nuova resistenza di valore a2 R, cioè la
resistenza R amplificata o ridotta a2 volte.
Lo stesso ragionamento si può ripetere se consideriamo, in regime sinusoidale,
induttanze o capacità, o, più in generale, una generica impedenza. Da quanto
precede, non dovrebbe essere difficile mostrare che, se la porta secondaria di un
trasformatore ideale, operante in regime sinusoidale, è chiusa su una generica
impedenza di valore Z, la porta primaria ‘vede’ un’impedenza che è pari a
45 Macchine elettriche statiche
V1 = a 2 Z ,
I1
dove è chiaro che V1 e I1 sono i fasori che rappresentano la tensione e la corrente
alla prima porta, rispettivamente. Questa formula è conosciuta come formula del
trasporto (anche detto riporto) di una impedenza al primario e tornerà molto utile
nel seguito.
i1(t)
a:1
i2(t)
i1(t)
+
+
v1(t)
v2(t)
−
−
+
R
v1(t)
a2 R
−
Figura 2.4: trasposto al primario di una resistenza.
Mettiamo in pratica subito quel che abbiamo appreso sul riporto al primario di
un’impedenza, convinti che, una volta effettuato il riporto, la rete diventa, in tutto
e per tutto, simile ad un normale circuito (tipicamente funzionante in regime
sinusoidale), privo di trasformatore ideale.
Esempio 1 - La rete mostrata in figura opera in regime sinusoidale. Determinare
il valore della potenza attiva assorbita dal resistore R.
R0
R
a:1
j(t)
RG
C
L
i1(t)
i2(t)
Si assuma che RG = 20 Ω, R0 = 2 Ω, R = 100 Ω, j(t) = J 2 cos(ωt), J = 20 A,
ω = 20 krad/s, L = 0.5 mH, C = 0.25 µF, a = 0.2.
46 Macchine elettriche statiche
Cominciamo a calcolare il valore delle due reattanze
XL = ωL = 10 Ω , XC = 200 Ω .
Poi, usiamo il coseno per la rappresentazione dei fasori, in modo che sia
j(t) = 20 2 cos(ωt) → J = J = 20 A .
La potenza assorbita dal resistore R può essere espressa in funzione di I1 o di I2
PR = R I22 = a 2 R I 21 ,
essendo, come è ben noto, le due correnti legate dalla relazione
I1 = I2 .
a
Riportando il resistore R e la reattanza XC al primario, la rete si semplifica come
indicato nello schema che segue.
A
J
RG
R0
a2 R
a2 XC
XL
I1
B
Se immaginate che il resistore RG e la reattanza XL costituiscano una sola
impedenza di valore
Z = R G || jXL = j RG XL = (4 + 8 j) Ω ,
RG + j XL
la corrente I1 può essere calcolata adoperando la regola del partitore di corrente
47 Macchine elettriche statiche
I1 = J
Z
.
2
Z + R 0 + a R - jX C
Sostituendo i valori numerici, si conclude che
I1 = 8 (1 + 2 j) A ,
e, di conseguenza, che la potenza media (o attiva) assorbita dal resistore R sarà
PR = a 2 R I 21 = 1280 W .
2.3 Accoppiamento mutuo
Dopo aver parlato del trasformatore ideale, introduciamo qualche aspetto della
realtà fisica: nella pratica tecnica, il trasformatore è costituito da due circuiti
mutuamente accoppiati, come quelli schematicamente indicati in Figura 2.5. Per la
verità, le due spire vengono avvolte su un supporto di materiale ferromagnetico,
ma di questo ci interesseremo nel paragrafo seguente.
grande distanza
i2(t)
i1(t)
v1(t) +
−
+ v2(t)
−
i1(t)
i2(t)
v1(t) +
−
+ v2(t)
−
B
Figura 2.5: due circuiti elettromagneticamente non accoppiati ed accoppiati.
In un primo momento immaginiamo che le due spire siano a grande distanza, tanto
che i campi magnetici sostenuti da ciascuna spira non interagiscano. In questa
situazione, ai capi delle due spire raccoglieremo le tensioni
48 Macchine elettriche statiche
v1 = L1 di1 , v2 = L2 di2 .
dt
dt
In ciò non vi è nulla di veramente nuovo: sapevamo già che ai capi di un induttore
percorso da una corrente variabile si manifesta una tensione variabile. Le due
costanti L 1 e L 2 sono le induttanze proprie dei due avvolgimenti e sono da
ritenersi quantità positive.
Avviciniamo, ora, i due avvolgimenti. In questa nuova situazione, i campi prodotti
dalle due spire interagiranno ed alle due precedenti tensioni si sommeranno due
nuovi contributi, secondo le relazioni:
v1 = L1 di1 + nuovo termine dovuto alla seconda spira ,
dt
v2 = L2 di2 + nuovo termine dovuto alla prima spira .
dt
Per comprendere appieno il funzionamento di due circuiti accoppiati dobbiamo,
allora, specificare meglio che cosa rappresentino questi due nuovi contributi.
Il primo circuito genera un campo magnetico variabile nel tempo il quale induce
nel secondo circuito una f.e.m. variabile. Questa f.e.m. indotta produce, nel
secondo circuito, il passaggio di una corrente, la quale a sua volta produce un
campo magnetico variabile nel tempo, che, proprio perché variabile, genera nel
primo circuito una seconda forza elettromotrice, e così via. Le stesse cose possono
essere dette per il secondo circuito. Si dice che i due circuiti sono mutuamente
accoppiati per mezzo del campo di induzione magnetica. Non tutte le linee di
campo prodotte dal primo (e dal secondo) circuito si concatenano con il secondo
(o con il primo) circuito; alcune saranno ‘disperse’ nel senso che, pur essendo
prodotte da uno dei due circuiti, non raggiungono l’altro. Ai fini pratici è
necessario evitare, o almeno limitare questa dispersione; pertanto, un
accoppiamento mutuo non viene realizzato in aria, ma, per quello che già
sappiamo dei circuiti magnetici, le due spire vengono avvolte, come mostrato in
Figura 2.6, su un ‘buon ferro’, che ha il compito di intrappolare la maggior parte
delle linee di campo induzione magnetica al suo interno. I due avvolgimenti
vengono, pertanto, realizzati su un materiale ferromagnetico che, a causa della
elevata permeabilità magnetica, riesce a trattenere gran parte del campo B al suo
interno, ed il ‘ferro’ diventa un tubo di flusso per questo campo. Nel prossimo
paragrafo parleremo in maniera più specifica dei circuiti accoppiati su materiale
ferromagnetico.
49 Macchine elettriche statiche
Nella Figura 2.6 abbiamo rappresentato anche una generico alimentatore collegato
alla porta primaria ed un carico generico collegato alla porta secondaria per
ricordarvi il maggiore impiego che viene fatto del trasformatore monofase.
i1(t)
+
−
+
v1(t)
−
i2(t)
B
N1
N2
B
+
v2(t)
−
Figura 2.6: due avvolgimenti su ‘ferro’.
Tornando al generico accoppiamento di Figura 2.5, le relazioni che lo definiscono
sono, pertanto:
v1 = L1 di1 + M 12 di2 ,
dt
dt
v2 = M 21 di1 + L2 di2 .
dt
dt
Quando siamo in regime sinusoidale, ricordando che al posto della derivata
rispetto al tempo possiamo sostituire l’operatore jω, le relazioni diventano
V1 = j ω L 1 I1 + j ω M12 I2 ,
V2 = j ω M21 I1 + j ω L 2 I2 .
Si noti come i valori delle due tensioni v1(t) e v2(t), al generico istante temporale
t, non dipendono da quelli delle correnti allo stesso istante, ma dalle loro derivate.
I coefficienti di autoinduzione L 1 e L 2, come sappiamo, sono positivi; quelli di
mutua induzione, M12 e M21, possono essere positivi oppure negativi a seconda dei
riferimenti scelti per i versi delle correnti.
Ora accade, come mostreremo
approfondimento, che
M12 = M 21 = M ,
tra
un
momento
in
un
riquadro
di
50 Macchine elettriche statiche
cioè che le due induttanze mutue del doppio bipolo sono uguali. Questo legame è
per noi molto importante in quanto porta a tre, e non quattro, i parametri che
caratterizzano un doppio bipolo accoppiamento mutuo: L 1, detto anche
autoinduttanza del circuito primario, L 2, detto anche autoinduttanza del circuito
secondario, ed M, detta mutua induttanza. I primi due sono sempre positivi; il
terzo può assumere qualsiasi segno. Per indicare anche sullo schema grafico il
segno di M, si adotta la convenzione mostrata in Figura 2.7.
i1(t)
i2(t)
M
+
v1(t)
M≥0
+
L1
L2
−
v2(t)
n1
−
i1(t)
n2
i2(t)
M
+
v1(t)
−
M≤0
+
L1
L2
v2(t)
−
n1
n2
Figura 2.7: convenzioni di segno per M.
Si osservi con attenzione la Figura 2.7: se alle due porte del doppio bipolo è stata
fatta, come d’abitudine la convenzione dell’utilizzatore, allora M è positivo quando
i due pallini neri sono affiancati; in caso contrario, M è da ritenersi negativo. Il
segno del flusso di mutua induzione dipende dalla convenzione scelta per il primo
e per il secondo circuito. Pertanto, anche se per il calcolo del flusso si conviene di
scegliere sempre come verso della normale quello che ‘vede’ il verso positivo
della circuitazione in senso antiorario (terna levogira), resta ancora un grado di
libertà nella scelta delle due normali relative ai due circuiti, come è indicato
sempre nella Figura 2.7.
Dimostrare che i due coefficienti di mutua induzione sono uguali non è cosa
semplicissima e, per comprenderla appieno, c’è bisogno di strumenti avanzati del
calcolo differenziale. Solo un desiderio di completezza ci anima, dunque, nel
riportarla qui di seguito. Partiamo dalla potenza istantanea assorbita dal doppio
bipolo accoppiamento mutuo, definita dalla relazione:
51 Macchine elettriche statiche
p(t) = v1(t) i1(t) + v2(t) i2(t) = L 1 di1 + M 12 di2 i 1 + L 1 di1 + M 12 di2 i 2 ,
dt
dt
dt
dt
Ricordando che la potenza istantanea è pari alla derivata dell’energia rispetto al
tempo
p(t) = dU ,
dt
possiamo anche scrivere la relazione precedente in termini differenziali:
dU = p(t) dt = L 1 i 1 + M 21 i 2 di 1 + L 2 i 2 + M 12 i 1 di 2 .
Ma, dato che l’energia è una funzione di stato, quest’ultima relazione deve essere
un differenziale esatto. Affinché ciò avvenga, occorre che le due derivate siano
uguali
∂(L 1 i 1 + M 21 i 2) = ∂(L 2 i 2 + M 12 i 1) ,
∂i2
∂i1
da cui discende immediatamente l’asserto
M12 = M 21 = M .
Dopo aver dimostrato che, in realtà, abbiamo bisogno di un solo coefficiente che
descriva l’accoppiamento mutuo, domandiamoci se tra questi tre parametri non
esista qualche altro legame. La risposta a questa domanda ci viene, come non è
difficile rendersi conto, considerando l’energia elementare
dU = L1 i 1(t) di1 + L2 i 2(t) di2 + M i2(t) di1 + i1(t) di2 .
Essa può essere integrata membro a membro e fornire, a meno di una costante
additiva di integrazione che si assume nulla, l’energia assorbita dal nostro doppio
bipolo al generico istante t di funzionamento
U(t) = 1 L 1 i 21(t) + M i1(t) i2(t) + 1 L 2 i 22(t) .
2
2
52 Macchine elettriche statiche
Ora, essendo il doppio bipolo in esame passivo, questa energia deve descrivere una
quantità che non cambia segno e risulta sempre positiva. La forma funzionale
suggerisce di porre in evidenza un termine sicuramente positivo, riscrivendola
come
2
U(t) = 1 L 1 i 21(t) 1 + 2 M i2(t) + L 2 i2(t) .
2
L 1 i1(t) L 1 i21(t)
Ciò che determina il segno dell’energia è la parte in parentesi nell’espressione
precedente. Infatti, questa parentesi quadra può essere riscritta come un trinomio
di secondo grado in forma adimensionale (che indicheremo con y)
y = 2 U(t) = L 2 x 2 + 2M x + 1 ,
L1
L 1 i 21(t) L 1
in cui abbiamo chiamato x il rapporto tra le due correnti x = i2(t)/i1(t). Ora,
affinché anche il secondo membro sia una quantità sempre positiva si deve avere
per tutti i valori della variabile x, cioè per ogni condizione di funzionamento, che
il discriminante del trinomio non sia positivo, cioè
2
∆ = 4 M - 4 L2 ≤ 0 .
L1
L 21
Avrete certamente riconosciuto nella funzione y, definita in precedenza, una
parabola, più precisamente un insieme di parabole, ad asse verticale, disegnata in
Figura 2.8. Questa figura lascia intuire anche graficamente perché il discriminante
deve essere minore di zero: se così non fosse, allora per alcuni valori della
variabile x, cioè per alcune condizioni di funzionamento, potrebbe accadere che
l’energia diventi negativa, cosa che dobbiamo scongiurare per i nostri scopi.
53 Macchine elettriche statiche
y
30
∆<0
20
10
∆=0
0
x
∆>0
-10
0
2
4
6
8
10
Figura 2.8: energia assorbita dal doppio bipolo accoppiamento mutuo.
Detto in altri termini, dobbiamo fare in modo che l’equazione di secondo grado
L 2 x 2 + 2M x + 1 = 0
L1
L1
ammetta soltanto radici complesse e coniugate, al più, reali e coincidenti, e ciò si
ottiene imponendo semplicemente che il discriminante non sia positivo (sia, cioè,
negativo o nullo).
Ora, imporre che questo discriminante sia minore di zero, equivale a dire che
M2 ≤ L 1 L 2
Si tratta di una condizione che deve sempre essere verificata affinché l’energia U
sia, in ogni istante e per qualunque valore del rapporto tra le correnti di uscita e di
ingresso, una quantità positiva, al più nulla in un punto. Comunque, nel caso limite
M2 = L1 L 2 si dice che siamo in condizione di accoppiamento perfetto: in tal
caso esiste un valore del rapporto delle correnti per cui l’energia del campo
magnetico è nulla. In questa condizione di funzionamento è evidente che i campi
magnetici, sostenuti dalle due bobine, siano uguali in modulo ed opposti in verso
in modo da produrre un campo risultante nullo. Se, invece, M2 < L1 L 2, si dice
54 Macchine elettriche statiche
che siamo in condizioni di accoppiamento non perfetto e l’energia presenta un
minimo, la cui ordinata è positiva.
• Accoppiamento perfetto
Soffermiamo, ora, la nostra attenzione su un caso particolare di accoppiamento:
l’accoppiamento perfetto. Come abbiamo già detto prima, si parla di
accoppiamento perfetto quando tra i diversi parametri vale la relazione
L1 L 2 = M 2 ,
che si può porre, introducendo il parametro ‘a’, nella forma equivalente
L1 = M = a .
M L2
Operando in regime sinusoidale, si ha che
V1 = j ω L 1 I1 + j ω M I2 ,
V2 = j ω M I1 + j ω L 2 I2 .
Dividiamo membro a membro queste due equazioni, allo scopo di considerare il
rapporto tra la tensione alla porta primaria e quella alla porta secondaria:
I1 + M I2
V1 = j ω L 1
L1 = L1 = a → V = a V .
1
2
V2 j ω M I1 + L 2 I2 M
M
Abbiamo, in tal modo, ottenuto la prima relazione che definisce il trasformatore
ideale. Ricaviamo ora la corrente I1, riscrivendo la prima equazione nella forma
I1=
V1 - M I .
2
j ω L 1 L1
Siccome M = L1/a, la precedente relazione diventa
I1 =
V1 - 1 I .
2
j ω L1 a
55 Macchine elettriche statiche
Questa ultima uguaglianza richiama alla memoria quella già vista nel
trasformatore ideale I2 = - a I1. Ma come si osserva vi è la presenza anche di un
altro addendo che può essere interpretato come una corrente relativa alla prima
maglia, che attraversa la reattanza ω L 1, posta in parallelo alla porta primaria.
I1
+
*
I1
I0
I2
a:1
+
V1 ω L 1
−
V2
−
Figura 2.9: circuito equivalente in condizioni di accoppiamento perfetto.
Osservate con cura la Figura 2.9: non dovrebbe meravigliarvi troppo che la rete
mostrata soddisfi l’equazione per le tensioni che definisce il trasformatore ideale e
che anche la seconda, in forza della LKC, deve essere verificata
*
I1 = I1 + I0 = - 1 I2 + V1 .
a
j ω L1
La cosa che dovete ricordare è che si è fatto tutto ciò per capire che si passa dal
concetto di trasformatore ideale a quello più concreto dell’accoppiamento mutuo,
aggiungendo alla prima maglia del trasformatore ideale una induttanza, proprio
come mostrato in Figura 2.9.
Si fa notare esplicitamente che, nel caso in cui l’induttanza L 1 assuma valori molto
elevati, la precedente relazione approssima molto bene quella del trasformatore
ideale, essendo
I1 ≅ - 1 I2 ,
a
se L1 → ∞ .
Esempio 2 - Si valutino le potenze, attiva e reattiva, erogate dal generatore di
tensione nella rete di figura in regime sinusoidale.
56 Macchine elettriche statiche
j(t)
R1
A
C2
R2
M
+
e(t)
L1
C1
L2
R3
−
L
B
j(t)
Si assuma e(t) = E sen(ωt), E = 100 2 V, j(t) = - J cos(ωt + π/4), J = 20 A,
ω = 1 krad/s, R1 = R2 = 10 Ω, R3 = 2.5 Ω, L = 5 mH, C1 = 0.1 mF, C2 = 0.4 mF,
L 1 = 10 mH, L 2 = 2.5 mH, |M| = 5 mH.
Per applicare il metodo fasoriale, si calcolano le reattanze
X = ωL = 5 Ω , X1 = 1 = 10 Ω , X2 = 1 = 2.5 Ω , XL1 = 10 Ω
ωC1
ωC2
e si trasformano le sinusoidi nei fasori corrispondenti, assumendo
e(t) = 100 2 sen(ωt) → E = 100 V ,
j(t) = - 20 cos(ωt + π/4) → J = 10 2 e-jπ/4 = 10 (1 - j) A .
La condizione
L1 L 2 = M 2
indica la presenza di accoppiamento perfetto e la rete assegnata può essere
trasformata come indicato in figura, avvalendosi di un trasformatore ideale
caratterizzato da un rapporto di trasformazione pari a
a = L1 = M = 2 .
M L2
57 Macchine elettriche statiche
R1
J
X2
R2
A
a:1
+
XL1
X1
E
R3
−
X
B
J
Riportando al primario la resistenza R3 e la reattanza X2,
R30 = a 2 R3 = 10 , X20 = a 2 X2 = 10 ,
la rete può ulteriormente semplificarsi come mostrato nella figura seguente.
R1
J
A
R2
X20
+
E
−
X1
XL1
R30
I
X
B
J
Dovendosi valutare la potenza complessa erogata
*
P = E I = PE + j QE ,
occorre determinare la corrente I che interessa il generatore di forza
elettromotrice. Appare immediata l’opportunità di semplificare ulteriormente la
rete valutando l’impedenza equivalente Z “vista” dai morsetti AB, comprensiva
della reattanza X1:
Z = -jX1 || R2 + jXL1 || R30 - jX20 = (5 - 10 j) Ω .
58 Macchine elettriche statiche
R1
J
A
I
+
I+J
E
Z
−
X
B
J
Applicando la seconda legge di Kirchhoff alla maglia, possiamo scrivere
E = R1 + jX I + Z I + J .
Dalla precedente relazione segue immediatamente che
I=
E - Z J = (6 + 12 j) A .
R1 + jX + Z
La potenza è quindi data da
P = PE + j QE = 600 - 1200 j ,
da cui discende immediatamente che
PE = 0.6 kW , QE = - 1.2 kVAr .
Ritorniamo all’accoppiamento perfetto. Se, invece di usare la prima relazione,
relativa alla tensione V1, per ricavare la corrente, avessimo deciso di usare la
seconda
V2 = j ω M I1 + j ω L 2 I2 ,
con un ragionamento del tutto analogo al precedente, avremmo potuto scrivere
I1 = - L 2 I2 + V2 = - 1 I2 + V2 = - 1 I2 - V2 .
a
a
M
jωM
j ω a L2
j ω L2
59 Macchine elettriche statiche
Nella Figura 2.10 riportiamo anche il circuito equivalente che corrisponde a
questa equazione: la reattanza ω L 2 è posta in parallelo alla porta secondaria, e
*
I2 = I2 - I0 = I2 -
V2 .
j ω L2
*
I1
+
a:1
I2
I2
+
ω L 2 V2
V1
−
I0
−
Figura 2.10: un altro circuito equivalente in condizioni di accoppiamento
perfetto.
Il circuito equivalente di Figura 2.10, tuttavia, viene scarsamente adoperato dato
che, per consuetudine, il carico viene posto in parallelo alla porta secondaria e,
pertanto, conviene il circuito di Figura 2.9 per realizzare efficacemente il riporto
al primario.
• Accoppiamento non perfetto
Anche in questo caso partiamo dalle due relazioni che definiscono il doppio bipolo
accoppiamento mutuo e, poiché siamo in condizioni di accoppiamento non
perfetto, deve essere
M2 < L1 L 2 .
Le induttanze proprie L 1 e L 2 sono dei numeri positivi che, dovendo soddisfare la
precedenze disuguaglianza, possiamo sempre immaginare costituite da due parti:
(2)
(2)
L 1 = L(1)
e L2 = L(1)
1 + L1
2 + L2 ,
(1)
in cui i due contributi L (1)
1 e L 2 sono scelti in maniera tale da soddisfare
l’uguaglianza
(1)
M2 = L(1)
1 L2 .
60 Macchine elettriche statiche
Questa scomposizione, che può apparire un mero artificio matematico, troverà un
riscontro nelle applicazioni che tra breve esamineremo.
Spieghiamoci con un esempio numerico. Supponiamo ci siano stati assegnati i
seguenti valori:
L 1 = 10 mH , L 2 = 6 mH , M = 5 mH .
Come potete facilmente controllare siamo in condizioni di accoppiamento non
perfetto:
M2 = 25 µH2 , L 1 L 2 = 60 µH2 e
M2 < L 1 L 2 .
Tuttavia possiamo sempre immaginare che, ad esempio, L 1 sia la somma di due
induttanze
L 1 = 5 mH + 5 mH , oppure L 1 = 8 mH + 2 mH .
L’importante è che la somma delle due induttanze in cui immaginiamo scomposto
il valore di L 1 diano, in ogni caso, per somma 10 mH. La stessa cosa potremmo
pensare di fare per L 2.
Riassumendo, abbiamo immaginato di scomporre in due contributi le
autoinduttanze della porta primaria e secondaria e le suddivisioni imposte
verificano il sistema
(2)
L (1)
1 + L1 = L1 ,
(2)
L (1)
2 + L2 = L2 ,
(1)
2
L (1)
1 L2 = M ,
(2)
(1)
(2)
composto da tre equazioni e quattro incognite: L (1)
1 , L 1 , L 2 e L 2 . Una incognita
è di troppo e, pertanto, possiamo fissarla a nostro piacimento: in genere, si usa
considerare L (2)
2 nullo, ma avremmo potuto altrettanto correttamente considerare
nullo L (2)
1 , ed il precedente sistema si semplifica
61 Macchine elettriche statiche
(2)
L (1)
1 + L1 = L1 ,
L (1)
2 = L2 ,
2
L (1)
1 L2 = M .
Se provate a risolvere questo sistema, otterrete i tre valori
2
2
(2)
M
M
L (1)
=
,
L
=
L
, L (1)
1
1
1
2 = L2 .
L2
L2
Ad esempio, usando i valori assegnati in precedenza, risulta il sistema
(2)
L (1)
1 + L 1 = 10 ,
L (1)
2 = 6 ,
L (1)
1 L 2 = 25 ,
che fornisce i tre valori
(2)
(1)
L (1)
1 = 4.16 mH , L1 = 5.83 mH , L2 = 6 mH .
Sostituendo la scomposizione appena sviluppata nella definizione del doppio
bipolo, otteniamo
(2)
V1 = j ω L (1)
1 + L1 I1 + j ω M I2 ,
V2 = j ω M I1 + j ω L (1)
2 I2 ,
relazioni che si possono, ovviamente scrivere nella forma equivalente
(2)
V1 = j ω L (1)
1 I1 + j ω M I2 + j ω L 1 I1 ,
V2 = j ω M I1 + j ω L (1)
2 I2 ,
Se nella prima relazione fosse assente il termine j ω L (2)
1 I 1, potremmo concludere
che si tratta delle stesse equazioni del caso dell’accoppiamento perfetto. Tuttavia,
l’aggiunta di questo termine comporta soltanto la piccola (ma sostanziale) modifica
indicata in Figura 2.11.
62 Macchine elettriche statiche
I1
ω L (2)
1
a:1
+
V1
I2
ω L (1)
1
−
+
V2
−
Figura 2.11: primo circuito equivalente in accoppiamento non perfetto.
Allora, quando ci troviamo in condizioni di accoppiamento non perfetto, si può
passare dal trasformatore ideale all’accoppiamento mutuo aggiungendo in serie
alla prima porta una induttanza di valore L (2)
1 .
Non ci resta che specificare quanto valga ‘a’. Dalla relazione (da noi imposta) che
definisce la parte di ‘accoppiamento perfetto’
2
L (1)
1 L2 = M
segue immediatamente che
(1)
L
a = 1 = M (nell’esempio a = 0.83) .
M L2
In genere, se il trasformatore è ben progettato, l’induttanza L (2)
1 (detta anche
(1)
induttanza longitudinale) è piccola rispetto alle altre due L 1 e L 2 (dette trasverse
o trasversali), che sono più grandi. Tra un po’ vi daremo qualche ordine di
grandezza relativo. Per il momento ci basti riassumere dicendo che, con
riferimento al circuito di Figura 2.11, il generico parametro longitudinale di un
trasformatore è più piccolo di quello trasversale.
Esempio 3 - Il doppio bipolo mostrato in figura opera in regime sinusoidale.
Determinare la sua rappresentazione in termini di impedenze.
63 Macchine elettriche statiche
i1(t)
i0(t) A i2(t)
M
v1(t)
L1
L2
R
v2(t)
B
Si assuma L 1 = L2 = 20 mH, M = 10 mH, R = 20, ω = 1 krad/s.
La rappresentazione in termini di impedenze è formalmente definita per mezzo
della trasformazione lineare di carattere generale
V1 = Z 11 I1 + Z m I2 ,
V2 = Z m I1 + Z 22 I2 ,
che, nel caso in cui il doppio bipolo si riduca ad un accoppiamento mutuo,
diventano
V1 = j ω L 1 I1 + j ω M I0 ,
V2 = j ω M I1 + j ω L 2 I0 .
Nel nostro caso, alle due relazioni ora scritte, va aggiunta quella che esprime la
prima legge di Kirchhoff al nodo A
I2 = I0 + V2 .
R
Eliminando da queste relazioni la corrente I0, ci si riconduce al sistema
V1 = j ω L 1 I1 + j ω M I2 - j ω M V2 ,
R
V2 = j ω M I1 + j ω L 2 I2 - j ω L 2 V2 ,
R
64 Macchine elettriche statiche
che individua una rappresentazione implicita per il doppio bipolo in esame. Dalla
seconda equazione, sommando i termini in V2 al primo membro, si ricava che
V2 = jωMR I1 + jωL 2R I2 ,
R + jωL 2
R + jωL 2
da cui discendono le due impedenze
Z m = V2
I1
Z 22 = V2
I2
I2 = 0
= jωMR = (5 + 5 j) Ω ,
R + jωL 2
I1 = 0
= jωL 2R = (10 + 10 j) Ω .
R + jωL 2
Sostituendo la tensione V2 appena trovata nella prima equazione
Z 11 = jωL 1 +
ω 2M2 = (2.5 + 17.5 j) Ω .
R + jωL 2
Per controllare i calcoli sviluppati, il lettore può ottenere la matrice delle
impedenze nella via più usuale, adoperando, cioè, le definizioni
Z 11 = V1
I1
I2 = 0
, Z m = V2
I1
I2 = 0
= V1
I2
I1 = 0
, Z 22 = V2
I2
.
I1 = 0
È evidente che dovrà ritrovare le impedenze calcolate in precedenza.
Discutiamo, infine, brevemente il caso in cui L (2)
1 viene scelto pari a zero. In
questo caso, seguendo un ragionamento simile a quello appena sviluppato, non è
difficile verificare che si può adoperare il circuito mostrato in Figura 2.12.
ω L (2)
2
I1
I2
a:1
+
+
V1 ω L 1
−
(1)
V2
−
65 Macchine elettriche statiche
Figura 2.12: secondo circuito equivalente in accoppiamento non perfetto.
L’induttanza longitudinale è passata dalla porta primaria a quella secondaria.
Inoltre, per quanto riguarda il valore di ‘a’ troverete che
a = L1 = M .
M L (1)
2
Nel caso generale, assumendo non nulli i quattro parametri, il doppio bipolo
accoppiamento mutuo si può schematizzare per mezzo del circuito di Figura 2.13
(provate a verificarlo da soli, ripetendo ciò che avete appreso nei due precedenti
casi).
I1
ω L (2)
1
a:1
+
V1
ω L (2)
2
ω L (1)
1
−
I2
+
V2
−
Figura 2.13: terzo circuito equivalente in condizioni di accoppiamento non
perfetto (nessun parametro nullo).
2.4 Accoppiamento su materiale ferromagnetico
Fatte queste premesse piuttosto generali in cui abbiamo discusso genericamente di
circuiti accoppiati, facciamo un passo avanti per rendere più concrete le cose dette
e consideriamo un accoppiamento mutuo, in presenza del ‘ferro’, come quello che
avevamo disegnato in Figura 2.6.
Per studiare questo nuovo oggetto, sempre in regime sinusoidale, sappiamo già di
poter utilizzare il circuito magnetico equivalente mostrato in Figura 2.14, circuito
che approssima tanto meglio la realtà, quanto più il ferro è un tubo di flusso per il
campo di induzione magnetica.
66 Macchine elettriche statiche
ℜ
−
+
N1 I1
−
N2 I2
Φ
+
Figura 2.14: circuito magnetico equivalente.
Fissiamo l’attenzione sui due solenoidi di Figura 2.6; per essi il flusso totale sarà:
primo solenoide, fatto di N1 spire, Φ1 = N 1 Φ ;
secondo solenoide, fatto di N2 spire, Φ2 = N 2 Φ .
Detto ciò, applichiamo la LKT alle due porte del trasformatore:
V1 = j ω Φ1 = j ω N1 Φ e V2 = j ω Φ2 = j ω N2 Φ .
Scriviamo, inoltre, la seconda legge di Hopkinson alla maglia del circuito
magnetico di Figura 2.14
N1 I1 + N 2 I2 = ℜ Φ .
Fermiamoci un momento e riassumiamo le equazioni che descrivono il
comportamento del nostro trasformatore su ‘ferro’:
V1 = j ω N1 Φ ,
V2 = j ω N2 Φ ,
N1 I1 + N 2 I2 = ℜ Φ .
Se facciamo il rapporto delle prime due equazioni del questo sistema
V1 = N1 = a ,
V2 N2
scopriamo che il parametro ‘a’ risulta completamente definito dal rapporto delle
spire degli avvolgimenti primario e secondario. Se, dunque, vogliamo un
67 Macchine elettriche statiche
trasformatore elevatore, bisogna fare in modo che il numero di spire al
secondario sia maggiore di quello al primario; per un trasformatore abbassatore,
bisogna fare esattamente il contrario.
Riscriviamo il sistema precedente nella forma:
V1 = a V2
(a = N1/N2) ,
V2 = j ω N2 Φ ,
I1 = - 1 I2 + ℜ Φ .
a
N1
• Ferro ideale
Il sistema appena scritto definisce un trasformatore ideale se vale la cosiddetta
condizione di ferro ideale, per la quale la permeabilità relativa del materiale
ferromagnetico che costituisce il trasformatore è molto elevata, al limite µr → ∞.
I materiali magnetici si dividono in tre grosse famiglie: i materiali diamagnetici,
quelli paramagnetici ed i ferromagnetici. I primi due tipi sono caratterizzati da
una permeabilità relativa prossima all’unità, mentre i materiali ferromagnetici
hanno permeabilità relative piuttosto elevate (105 ed oltre). Ora, dal momento che
la riluttanza, definita come il rapporto
ℜ=
1 L,
µ0 µr S
in cui L è lunghezza media del circuito magnetico e S la sua sezione trasversale,
tende a diventare sempre più piccola, al limite nulla, quanto più aumenta la
permeabilità del mezzo. In queste ipotesi, si avrà che ℜ → 0, ovvero che la
riluttanza tende a zero, dando luogo al nuovo e più semplice sistema
V1 = a V2
a = N 1/N2 ,
V2 = j ω N2 Φ ,
I1 = - 1 I2 ,
a
che rappresenta proprio un trasformatore ideale. Rappresentiamo in un
diagramma fasoriale nel piano di Gauss le equazioni del trasformatore ideale.
68 Macchine elettriche statiche
V1
I1
V2
Φ
I1
I2
a:1
I2
+
+
V1
V2
−
−
Figura 2.15: primo e più semplice modello di trasformatore su ‘ferro’.
Spieghiamo come si è giunti a questo diagramma fasoriale. Scelto l’orientamento
per il flusso Φ, è evidente che le due tensioni V1 e V2 sono in anticipo di fase
rispetto ad esso di π/2; in Figura 2.15 abbiamo rappresentato come esempio un
trasformatore abbassatore. L’angolo che vi è, poi, tra queste tensioni e le due
correnti dipende dall’impedenza Z sulla quale viene chiusa la porta secondaria
dato che
V2 = - Z I2 .
Il segno meno deriva dal fatto che si è fatto uso della convenzione del generatore
sul carico. Le due correnti I1 e I2, tuttavia, devono essere in opposizione di fase e
che, nell’ipotesi di trasformatore abbassatore, la prima corrente deve essere, in
modulo, più piccola della seconda.
• Riluttanza finita
Facciamo un ulteriore passo in avanti e supponiamo di trovarci con un ferro un
po’ ‘più reale’ che abbia una riluttanza piccola, ma non nulla. Torniamo, in altri
termini, alle equazioni più generali ed in tal caso dovremo tenere conto del nuovo
addendo della corrente
I1 = - 1 I2 + ℜ Φ = - 1 I2 + ℜ V1 .
a
a
N1
j ω N21
69 Macchine elettriche statiche
Questo nuovo termine si può facilmente interpretare come la corrente che passa
attraverso un’induttanza, posta in parallelo alla porta primaria, e di valore
2
L 0 = N1 .
ℜ
Pertanto l’equazione può formalmente essere riproposta nella forma
I1 = - 1 I2 + I0 = - 1 I2 + V1 .
a
a
j ω L0
Quindi si deve aggiungere alla prima maglia del trasformatore ideale una
induttanza in parallelo alla prima porta come mostrato in Figura 2.16.
V1
*
V2
I1
I1
Φ
I0
I1
*
I2
I1
a:1
I2
+
V1
−
I0
L0
+
V2
−
Figura 2.16: secondo modello di trasformatore su ‘ferro’.
Il diagramma fasoriale di Figura 2.15 si complica solo per quanto riguarda la
corrente I1 che si arricchisce di un ulteriore componente che ha la stessa direzione
e verso del flusso Φ, cioè è in fase con il flusso. Ciò lo si deduce dal fatto che
I0 =
V1 = j ω N1 Φ = N1 Φ .
j ω L0
j ω L0
L0
70 Macchine elettriche statiche
*
Quindi il vero fasore I1 risulterà dalla composizione di I1 e di I0, come si deduce
dalla Figura 2.16. Si confronti, ora, il circuito equivalente riportato in Figura 2.9
con quello appena costruito di Figura 2.16: cosa se ne può ricavare?
Che sono identici! Ciò vuol dire che considerando una riluttanza finita il circuito
equivalente del trasformatore coincide con il caso dell’accoppiamento perfetto.
Per convincercene fino in fondo, calcoliamo i parametri equivalenti del doppio
bipolo, cioè L 1, L 2 ed M. Immaginiamo, cioè, di rappresentare il nostro
accoppiamento su ferro per mezzo del legame generale
V1 = j ω L 1 I1 + j ω M12 I2 ,
V2 = j ω M21 I1 + j ω L 2 I2 ,
che, se si osserva che
V1 = j ω Φ1 , V2 = j ω Φ2 ,
può essere facilmente riscritto in termini di flussi
Φ1 = L1 I1 + M I2 ,
Φ2 = M I1 + L2 I2 .
Ora, ricordando quanto abbiamo imparato sui doppi bipoli e che il flusso nel ferro
vale
N1 I1 + N 2 I2 = ℜ Φ ,
non è difficile ricavare i parametri che ci interessano. Cominciamo con L 1:
2
2
L 1 = Φ1 = N1 Φ = N1 I1 = N1 , quando I2 = 0 .
I1
I1
I1 ℜ ℜ
Similmente per L 2 risulta:
2
2
L 2 = Φ2 = N2 Φ = N2 I2 = N2 , quando I1 = 0 .
I2
I2
I2 ℜ ℜ
La mutua induttanza, infine, vale:
71 Macchine elettriche statiche
M = Φ1 = N1 Φ = N1 N2 I2 = N1 N2 , quando I1 = 0 .
ℜ
I2
I2
I2 ℜ
Le ultime tre relazioni confermano in pieno l’ipotesi che avevamo intuito
guardando gli schemi equivalenti: siamo in condizioni di accoppiamento perfetto
e, pertanto,
2 2
2
2
M2 = N1 N2 = L1 L 2 = N1 N2 .
ℜ ℜ
ℜ2
• Perdite nel ferro
Facciamo un altro passo verso un modello più reale. Fino ad ora abbiamo
ipotizzato che le perdite per isteresi magnetica e per correnti parassite fossero così
piccole da poter essere trascurate. Tenerne conto in maniera precisa non è facile
dato che esse dipendono, oltre che dal tipo di materiale ferromagnetico, anche
dalla geometria, cioè dalla forma che ha il trasformatore.
Si ricorda che le perdite per isteresi sono dovute all’attrito che nasce tra i vari
domini di Weiss quando sono costretti a seguire un campo magnetico esterno e
l’area del ciclo di isteresi è proporzionale all’energia che si dissipa in un solo
periodo. Le perdite per correnti parassite, invece, sono dovute alla nascita di
correnti elettriche nel ferro che, oltre ad essere un materiale ferromagnetico, è
anche un buon conduttore. Le perdite per isteresi producono una potenza perduta
specifica che è linearmente dipendente dalla frequenza; quelle per correnti
parassite dipendono, invece, dal quadrato della frequenza.
V1
I0
*
V2
I1
I1
Iρ
Φ
Iµ
L0
R0
Iµ
I2
I0
Iρ
Figura 2.17: terzo modello contenente le perdite per isteresi e correnti parassite.
72 Macchine elettriche statiche
Queste perdite si inseriscono nel circuito equivalente 2.16 considerando, in
parallelo all’induttore L 0, una resistenza, che, in Figura 2.17 abbiamo indicato
genericamente con R0.
Nel diagramma fasoriale la I0 risulterà somma della corrente Iµ che interessa
l’induttore e di quella Iρ assorbita dal resistore, come mostrato in Figura 2.17.
• Induttanze di dispersione
Facciamo ora un ulteriore passo in avanti. Visto che si sta considerando un ferro
non ideale dobbiamo anche valutare il fatto che le linee di flusso generate dei due
avvolgimenti non sono più tutte interne al ferro, ma che alcune di queste linee di
flusso vadano perse, come mostrato schematicamente in Figura 2.18.
Il flusso Φ1 che si concatena, ad esempio con il primo avvolgimento, può essere
pensato come costituito da due flussi: il flusso principale N1Φ che concatena
entrambi gli avvolgimenti e di un flusso disperso Φ1D, sicché
Φ1 = N 1 Φ + Φ1D .
B
i1(t)
+
v1(t)
−
B
campo disperso
Figura 2.18: campo disperso alla porta primaria di un trasformatore.
Similmente e con analogo significato dei simboli, alla porta secondaria possiamo
porre
Φ2 = N 2 Φ + Φ2D .
Ora, le tensioni alla porta primaria e secondaria, essendo pari a
V1 = j ω Φ1 e V2 = j ω Φ2 ,
73 Macchine elettriche statiche
per quanto appena detto, possono essere riscritte nella forma equivalente
V1 = j ω N1 Φ + Φ1D
e V2 = j ω N2 Φ + Φ2D .
Queste ultime due relazioni mostrano chiaramente che nel circuito equivalente
dobbiamo aggiungere altre due induttanze, in serie alle porte primaria e
secondaria, di valore
L 1D = Φ1D , L 2D = Φ2D .
I1
I2
Se dunque inseriamo queste induttanze in serie alla porta primaria e secondaria,
otteniamo il circuito equivalente mostrato in Figura 2.19.
I1
ω L 1D
*
I1
+
I0
ω L0
V1
−
R0
Iµ
Iρ
ω L 2D
a:1
+
E1
−
+
E2
−
I2
+
V2
−
Figura 2.19: inserimento delle induttanze di dispersione.
Vale la pena notare come, in Figura 2.19, abbiamo indicato con E 1 e E 2 le tensioni
alle porte del trasformatore ideale per distinguerle da quelle in ingresso al
trasformatore che, a causa delle cadute di tensione sulle due nuove induttanze di
dispersione, non coincidono più.
Non ci resta che aggiungere due resistori, di opportuno valore R1 ed R2, in serie
alle induttanze di dispersione, che tengano in debito conto delle perdite nel rame,
delle perdite resistive nei due avvolgimenti, primario e secondario, per ottenere lo
schema circuitale di Figura 2.20, che rappresenta un trasformatore reale.
74 Macchine elettriche statiche
I1
ω L 1D
*
I1
+
V1
−
+
I0
ω L0
R0
R1
Iµ
ω L 2D
a:1
+
E1
+
E2
Iρ
−
−
I2
V2
R2
−
Figura 2.20: inserimento delle resistenze degli avvolgimenti.
Siamo finalmente giunti allo schema più completo, ma anche più complicato, che
descrive il funzionamento del trasformatore monofase. Per completare il nostro
lavoro, dobbiamo fare il diagramma fasoriale relativo al nuovo circuito
equivalente.
La Figura 2.21 riporta questo diagramma per il circuito di Figura 2.19;
costruitelo con cura, verificando la posizione relativa dei diversi fasori.
V1
E1
R1 I1
E2
I1
V2
jωL 2D I2
I2
jωL 1D I1
*
I1
Iρ
R2 I2
Φ
Iµ
I0
Figura 2.21: diagramma fasoriale.
Soltanto due osservazioni prima di concludere questo paragrafo. Il circuito cui
siamo giunti che ‘traduce’ in rete elettrica il funzionamento del trasformatore, è,
75 Macchine elettriche statiche
per alcune applicazioni, troppo complicato e, pertanto, il primo lavoro che ci
attende è la ricerca di schemi semplificati.
La seconda cosa da sottolineare riguarda la corrente I0: se osservate con cura la
Figura 2.20, concluderete che essa può a buon diritto chiamarsi corrente a
vuoto poiché, se alla porta secondaria non vi venisse collegato alcun carico, cioè
se questa porta fosse aperta, la corrente circolerebbe solo nella maglia primaria e
varrebbe la relazione
I1 = I0 .
Si noti che, nella realtà, la corrente I0 è spesso, in valore efficace, molto più
piccola della I1, così come le cadute di potenziale sugli elementi longitudinali sono
molto più piccole di V1 e di V2, rispettivamente. La Figura 2.21 deve intendersi
come solo indicativa, poiché le ampiezze dei diversi fasori sono state scelte
soltanto sulla base di criteri di chiarezza grafica. Su queste ultime osservazioni
torneremo nel seguito.
2.5 Modelli semplificati del trasformatore
Il circuito equivalente, riportato in Figura 2.20, risulta molto utile quando il
trasformatore cui ci si riferisce sia inserito in una rete elettrica e si voglia
analizzare il comportamento nel suo insieme. Tuttavia, per evitare calcoli troppo
complessi, si accetta spesso di modificare questo circuito equivalente, cercando, al
tempo stesso, di contenere entro qualche percento gli errori dovuti alla
semplificazione introdotta. Aggiungiamo ancora che non è facile, per mezzo di
prove sperimentali, conoscere il valore di tutti i parametri equivalenti, nel senso
che non tutti i parametri possono essere dedotti indipendentemente. Con queste
premesse, si capisce la necessità di ricorre ad un circuito semplificato, i cui
parametri siano facilmente deducibili da misure di tensione e corrente, fatte alle
due porte.
La schema semplificato maggiormente in uso è il cosiddetto modello a flusso
bloccato, mostrato in Figura 2.22: la modifica apportata, rispetto alla Figura
2.20, consiste nello spostare il ramo (in gergo detto ‘cappio’) trasversale composto
dal resistore R0 e dall’induttore L 0 a sinistra di L 1D e di R1. Questo modello viene
detto ‘a flusso bloccato’ perché la corrente Iµ, che era proporzionale al flusso
Iµ =
V1 = j ω N1 Φ = N1 Φ ,
j ω L0
j ω L0
L0
76 Macchine elettriche statiche
è nota quando la tensione della porta primaria è assegnata.
L 1D
I1
+
V1
Iµ
−
R0
Iρ
R1
L 2D
a:1
+
I0
L0
*
I1
E1
−
+
+
E2
−
I2
V2
R2
−
Figura 2.22: modello a flusso bloccato.
Ciò è lecito, in prima approssimazione, perché il valore efficace della corrente I0 è
piccolo, in condizioni di funzionamento normale, rispetto a quello della corrente
I1, ed il fatto che ora I0 non percorra più R1 e L 1D modifica poco la caduta di
tensione su questi due bipoli. Se aggiungiamo, poi, che questa caduta di tensione è
piccola rispetto a V1 e E 1, si intuisce perché il nuovo schema lascia praticamente
inalterate le varie grandezze presenti nel circuito equivalente.
Dallo schema di Figura 2.22 è facile ottenere un ulteriore modello, rappresentato
in Figura 2.23, che si ottiene riportando al secondario le resistenze e le reattanze
di dispersione del circuito primario. Le resistenze sono state, dunque, accorpate in
un’unica resistenza di valore
RT = R 2 + R1 ,
a2
mentre l’induttanza complessiva è pari a
LT = L2 + L1 .
a2
77 Macchine elettriche statiche
*
I1
I1
+
V1
I0
L0
Iµ
−
LT
a:1
+
R0 E 1
+
−
+
E2
Iρ
−
I2
V2
RT
−
Figura 2.23: modello a flusso bloccato con perdite tutte al secondario.
Nel circuito equivalente di Figura 2.22, pertanto, tutte le perdite ‘longitudinali’
sono state riportate al secondario. Nel seguito faremo largo uso di questo modello.
2.6 Un cenno agli effetti non lineari
Chiuso il discorso sui circuiti equivalenti, è necessario sviluppare qualche
osservazione sugli effetti non lineari che possono avere luogo dato che, come
certamente ricorderete, i materiali ferromagnetici sono descritti da un legame tra
l’induzione ed il campo magnetico di tipo isteretico, che significa non lineare ed a
più valori.
Finora abbiamo ipotizzato che il ferro adoperato nella costruzione del
trasformatore abbia un comportamento ideale, avendo supposto
B= µH.
Anzi, abbiamo immaginato che la permeabilità magnetica fosse elevata, se non
addirittura infinita. Rimuovere questa ipotesi non è cosa semplice: lo studio dei
sistemi non lineari è argomento di studio avanzato e molti gruppi di ricerca, anche
afferenti a discipline diverse, dalla termodinamica all’elettromagnetismo, stanno
spendendo molte energie per fare luce in un campo difficile da ... arare.
Ciò che abbiamo implicitamente assunto nel nostro precedente studio è che, se la
tensione di alimentazione ad una porta del trasformatore è sinusoidale di assegnata
frequenza, anche tutte le altre grandezze sono sinusoidali e della stessa frequenza
imposta dal generatore. E questa è una particolarità che caratterizza in maniera
forte i sistemi lineari: se il segnale di ingresso, quale esso sia, è sinusoidale, anche
l’uscita lo è ed inoltre conserva la stessa frequenza dell’ingresso. Come per il
78 Macchine elettriche statiche
regime sinusoidale, anche in questo caso si intende che il transitorio, peraltro
breve, sia terminato: qui ci riferiamo soltanto alla soluzione di regime, proprio
come facemmo per l’alternata.
Considerare un ferro non ideale non è facile e ci si limiterà soltanto a proporre un
esperimento che possa mettere in luce una delle più importanti proprietà dei
sistemi non lineari. In realtà, nel caso dei materiali ferromagnetici il problema è
ancora più complicato per la presenza dell’isteresi. Ma questo punto verrà da noi
trascurato.
Consideriamo l’esperimento proposto in Figura 2.24. Il trasformatore presenta la
porta secondaria a vuoto allo scopo di realizzare un induttore che, come vedremo
tra poco, è non lineare. I trasduttori di corrente e tensione presenti nello schema
sono dispositivi elettronici che convertono i valori istantanei di corrente e tensione
in segnali comprensibili dall’elaboratore elettronico. La presenza di un
elaboratore elettronico rappresenta una gran comodità dato che in tal modo
possiamo comodamente rappresentare sullo schermo le forme d’onda della
corrente e della tensione.
i(t)
+
v(t)
−
TC
TT
PC
TC → Trasduttore di corrente
TT → Trasduttore di tensione
Figura 2.24: analisi armonica di un trasformatore.
Nella Figura 2.25 sono riportate le tracce di corrente, visibili sul calcolatore, nel
caso in cui la tensione sia una funzione sinusoidale, del tipo
v(t) = VM sen(ωt) ,
79 Macchine elettriche statiche
la frequenza sia fissa e l’ampiezza assuma i tre valori VM = (0.5, 1, 1.2) V.
3
Corrente normalizzata
VM = 1.2 V
2
1
0
ωt
VM = 0.5 V
-1
-2
VM = 1 V
-3
0
2
4
6
8
10
Figura 2.25: uscite non lineari.
Cosa si deduce da questi grafici?
Osservando con attenzione la figura riportata, si comprende che, fino a quando il
valore massimo della tensione è piccolo, la corrente ha un andamento molto
somigliante ad una funzione sinusoidale. Appena il valore massimo aumenta, la
forma d’onda che la rappresenta non è nemmeno lontanamente somigliante ad una
sinusoide. Più precisamente, per descrivere la corrente, avremmo bisogno non più
di una sola funzione sinusoidale, ma di più sinusoidi, le cui frequenze sono
multipli interi della frequenza del generatore. In altri termini, la corrente è
rappresentabile da una somma del tipo
i(t) = I1 sen(ωt) + I2 sen(2ωt) + I3 sen(3ωt) +
,
cioè una combinazione lineare di funzioni sinusoidali di valori massimi I1, I2, I3 e
pulsazioni ω, 2ω, 3ω (per la verità, nel caso del trasformatore l’ampiezza I2 è
nulla: ma questo è un inutile dettaglio e, pertanto, lo trascuriamo). Proprio questa
era la proprietà dei sistemi non lineari che ci premeva mettere in luce: pur
essendo la tensione di ingresso una funzione sinusoidale di assegnata pulsazione, la
corrente presenta più sinusoidi di pulsazioni diverse, al limite anche infinite.
80 Macchine elettriche statiche
Potremmo dire che un sistema non lineare ‘crea’ frequenze diverse (multiple) da
quella del segnale di ingresso.
Dal punto di vista del sistema elettrico, in generale, questa creazione di frequenze
è un fenomeno indesiderato che va sotto il nome di inquinamento armonico e che
può creare non pochi problemi alle linee di trasmissione a cui il trasformatore
viene collegato. Lo studio dettagliato di questi fenomeni, comunque, esula dai
limiti impostici, pur rappresentando uno dei più bei capitoli della Matematica,
conosciuto come studio delle serie di Fourier.
2.7 Condizioni e valori nominali
Le condizioni nominali di funzionamento sono quelle per le quali un trasformatore
subisce delle sollecitazioni adeguate alle caratteristiche per cui è stato prima
progettato, poi costruito. Esse vengono precisate dal costruttore proprio per
evitare tutte quelle sollecitazioni per le quali il trasformatore non è stato
progettato, e vengono, d’abitudine, espresse come:
V1N ,
valore efficace della tensione primaria nominale ;
I1N ,
valore efficace della corrente primaria nominale ;
V2N ,
valore efficace della tensione secondaria nominale ;
I2N ,
valore efficace della corrente secondaria nominale ;
cos ϕ 2N , fattore di potenza nominale .
Se conosciamo i parametri del circuito equivalente e i valori dei parametri
nominali, possiamo ricavare altri parametri nominali, tra i quali l’impedenza
secondaria nominale
Z 2N = Z 2N , ϕ 2N = V2N , ϕ 2N ,
I2N
e la cosiddetta potenza nominale, intesa come potenza apparente secondaria in
condizioni nominali
AN = A 2N = V 2N I 2N .
Le sollecitazioni a cui il trasformatore è sottoposto durante il suo esercizio
possono essere di natura diversa e, se non sono tenute sotto controllo, possono
determinare non pochi problemi. Qui esamineremo, in rapida sintesi, le principali.
81 Macchine elettriche statiche
• Sollecitazioni meccaniche
Le forze di attrazione e repulsione dovute all’interazione delle correnti tra le spire
che compongono gli avvolgimenti producono vibrazioni contenute nei limiti
stabiliti.
Figura 2.26: danni per sforzi meccanici negli avvolgimenti.
Queste vibrazioni rappresentano la sorgente del normale ronzio del trasformatore
e non creano eccessivi sforzi interni che, con il passare del tempo, potrebbero
compromettere la compattezza meccanica della macchina.
Nella appendice posta alla fine del capitolo approfondiamo l’argomento degli
sforzi elettrodinamici che, se non sono tenuti sotto controllo, possono arrecare
danni molto gravi al trasformatore, come testimonia la Figura 2.26.
• Sollecitazioni dielettriche
Le tensioni tra i vari punti degli avvolgimenti e del nucleo devono assumere i
valori previsti per essere correttamente sopportate dalla rigidità dielettrica dei
vari isolanti.
• Sollecitazioni magnetiche
Di esse si è già fatto cenno nel precedente paragrafo ed il flusso, o l’intensità
dell’induzione magnetica, assume un valore massimo per uno sfruttamento
82 Macchine elettriche statiche
ottimale del ferro, senza raggiungere il limite di saturazione, che provocherebbe
eccessive distorsioni nelle forme d’onda della corrente magnetizzante.
• Sollecitazioni termiche
Il calore dissipato per effetto Joule negli avvolgimenti (perdite nel rame) e quello
dovuto alle perdite nel ferro elevano la temperatura interna nei vari elementi
rispetto al valore previsto in sede di progetto.
Figura 2.27: raffreddamento in un trasformatore di grossa potenza.
Per porre rimedio a questo inconveniente, bisogna riuscire a rimuovere questo
calore in eccesso. Per i trasformatori di piccola potenza, la naturale convezione
dell’aria è sufficiente a tenere sotto controllo la temperatura. Tuttavia, se la
potenza cresce, è necessario rimuovere il calore in eccesso, cosa che può essere
fatta aumentando la superficie di scambio termico, cioè alettando il cassone che
contiene il trasformatore.
Se nemmeno le alette sono sufficienti, si realizza una convezione forzata facendo
passando un liquido refrigerante in tubi che avviluppano la macchina. Pertanto, il
sistema di smaltimento del calore in eccesso, considerando il tipo di
raffreddamento, può essere indicato dai seguenti simboli:
83 Macchine elettriche statiche
N
F
D
sta per naturale;
sta per forzata;
sta per forzata e guidata.
Invece, considerando il tipo di refrigerante, si possono adoperare i simboli:
O
L
G
W
per olio minerale non infiammabile;
per altro liquido non infiammabile;
per gas;
per acqua.
Figura 2.28: raffreddamento forzato per mezzo di tubi e ventola.
In tal modo, per un trasformatore di elevata potenza, la sigla ONAF indica che il
raffreddamento avviene con Olio Naturale, il cui movimento è spontaneo sotto
l’azione del calore, ed Aria Forzata, la quale, sospinta da ventilatori, asporta il
calore dell’olio.
2.8 Rendimento
84 Macchine elettriche statiche
Come abbiamo detto nel primo capitolo, per una macchina o, più in generale, per
un qualunque dispositivo elettrico, uno dei parametri tecnici che ne caratterizza le
prestazioni è il rendimento. Anche per il trasformatore si può definire il
rendimento come rapporto tra la potenza restituita in uscita e quella fornita in
ingresso
η = Potenza in uscita = PUS .
Potenza in ingresso PIN
Questo rapporto è, tuttavia, difficile da misurare, specialmente per i trasformatori
di elevata potenza, che possono avere rendimenti pari circa a 0.99. Non molto
tempo fa, a causa della imprecisione degli strumenti di misura, poteva capitare
che, disposti due wattmetri alla porta di ingresso e di uscita, un errore di misura
in eccesso sulla potenza in uscita ed uno in difetto su quella in ingresso, essendo
queste due potenze praticamente coincidenti, portava ad un valore fisicamente
assurdo del rendimento, un valore maggiore dell’unità. Se, poi, a ciò si aggiunge
la difficoltà di avere a disposizione strumenti di misura che possano sopportare il
passaggio di corrente e tensioni elevate, si conclude che è preferibile valutare il
rendimento in maniera indiretta, secondo la definizione:
η=
PUS
.
PUS + PCu + PFe
Questa relazione definisce il rendimento come il rapporto della potenza in uscita,
anche detta potenza trasferita al secondario, e della potenza in ingresso, intesa
come somma delle potenze perdute nel rame, nel ferro e della potenza di uscita
stessa. In realtà, si tratta del rendimento convenzionale, detto così a causa della
presenza di perdite di altro tipo quali quelle per ventilazione, magnetostrizione ed
elettrostrizione, non tenute in conto in questa definizione.
Per valutare le diverse potenze presenti, facciamo riferimento allo schema
semplificato a flusso bloccato e con perdite tutte al secondario di Figura 2.23, e
supponiamo che alla porta primaria vi sia un generatore di tensione, mentre a
quella secondaria vi sia un carico generico, caratterizzato dall’impedenza
Z = Z , ϕ = Z (cos ϕ + j sen ϕ) .
La Figura 2.29 riporta lo schema che vogliamo usare per il calcolo del
rendimento, uno schema che, seppur riferito ad un modello semplificato del
trasformatore, ci consentirà di fare interessanti considerazioni. Notate che, alla
85 Macchine elettriche statiche
porta secondaria, abbiamo cambiato il verso della corrente, facendo sul carico la
convenzione dell’utilizzatore; in ciò non vi è nulla di magico: solo un cambio di
verso per scrivere in maniera più compatta le formule che seguono. Segue, allora,
che la potenza assorbita dal carico è pari a
PUS = V 2 I 2 cos ϕ .
Le perdite nel ferro, legate al resistore R0, sono
2
PFe = R 0 I 2ρ = V1 ,
R0
ed, una volta assegnata la tensione alla porta primaria, sono note, almeno fin
quando è valido il modello di trasformatore utilizzato. In particolare, queste
perdite non dipendono dalla corrente I2 della porta secondaria.
*
I1
I1
I0
LT
a:1
+
I2
+
+
+
L0
V1
−
Iµ
R0 E 1
E2
Iρ
−
−
V2
RT
Z
−
Figura 2.29: schema semplificato per la valutazione delle perdite.
La potenza dissipata nel rame per effetto Joule, invece, è data da
PCu = R T I 22 ,
Sostituendo queste relazioni scritte nella definizione del rendimento, si ottiene
η=
V2 I 2 cos ϕ
PUS
=
.
PUS + PCu + PFe V2 I 2 cos ϕ + R T I 22 + PFe
86 Macchine elettriche statiche
Osservate subito che non abbiamo sostituito per le perdite nel ferro nell’ultima
relazione, dato che esse dipendono esclusivamente dalla tensione primaria che
supponiamo assegnata e fissa. Molto diffuso nella pratica tecnica è riferirsi non
tanto alla corrente della porta secondaria, quanto al rapporto adimensionale
α = I2 ,
I2N
tra questa corrente e la corrente nominale alla stessa porta. Generalmente, il
coefficiente α ≤ 1 e, solo per periodi limitati, si può tollerare la condizione di
sovraccarico α > 1. Il rendimento può, pertanto, riscriversi nella nuova forma
η=
V2 I 2N cos ϕ
V2 I 2N cos ϕ +
R T I 22N
α + PFe
α
.
Siamo, finalmente, giunti al punto nodale della trattazione. Chiediamoci:
supponendo che il valore efficace della tensione secondaria V2 non cambi, come
accade nelle principali applicazioni domestiche ed industriali, per quale valore di
α il rendimento è massimo?
Se supponiamo che la tensione secondaria sia fissa e non dipenda da α, il massimo
rendimento si raggiunge quando il denominatore D(α)
D(α) = V2 I 2N cos ϕ + R T I 22N α + PFe
α
è minimo. La parte posta nel riquadro che segue mostra come si trovi questo
valore minimo.
La funzione
D(α) = V2 I 2N cos ϕ + R T I 22N α + PFe ,
α
assume il suo valore minimo per
α = αMIN =
PFe .
RT I 22N
Per verificare questa affermazione, considerata la derivata prima rispetto a α
87 Macchine elettriche statiche
d D(α) = RT I 22N - PFe ,
dα
α2
possiamo affermare, ricordando che, per definizione, α è un numero positivo, che
la funzione cresce se
d D(α) > 0 → RT I 22N - PFe > 0 → α > αMIM =
dα
α2
αMIN
PFe .
RT I 22N
α
0
minimo
Ciò basta a provare che la funzione ammette il minimo predetto.
Dunque, se
α=
PFe ,
RT I 22N
avremo un minimo del denominatore D(α) e questo minimo non dipende dal
fattore di potenza, il cos ϕ, del carico. In corrispondenza di questo valore, il
rendimento convenzionale del trasformatore è massimo, come mostrato in Figura
2.30, per disegnare la quale abbiamo assunto una potenza apparente nominale alla
porta secondaria S2N = V 2N I 2N = 200 kVA, una potenza nominale assorbita dagli
avvolgimenti di rame pari a RT I 22N = 2 kW ed una potenza dissipata nel ferro
PFe = 1 kW. Con questi dati il rendimento diventa
η=
200 α cos ϕ
,
200 α cos ϕ + 2 α2 + 1
che è proprio la funzione disegnata in figura, per un valore del fattore di potenza
del carico pari a 0.8.
88 Macchine elettriche statiche
Si osservi che la zona in cui si raggiunge il valore massimo del rendimento è
piuttosto larga. Stesso andamento si ottiene anche cambiando il fattore di potenza;
in particolare, il massimo rendimento si ottiene quando il carico è puramente
resistivo, ovvero cos ϕ = 1 e, per un’ampia classe di trasformatori commerciali, il
‘largo’ massimo si ottiene attorno al valore α = 3/4.
η
1
0.95
0.9
0.85
cos ϕ = 0.8
0.8
0.75
0.7
0.65
α
0.6
0
0.5
1
1.5
2
Figura 2.30: rendimento del trasformatore al variare del parametro α.
Ponendoci nella condizione di massimo, siamo in grado di determinare la corrente
che dovrebbe circolare al secondario per avere rendimento massimo. Tuttavia ciò
non è sempre possibile. Tuttavia, la corrente che circola al secondario dipende dal
carico, cioè dalle richieste degli utenti, che variano continuamente. Quindi,
nell’arco di una giornata il rendimento cambia in continuazione, e per tenerne
conto si definisce il rendimento giornaliero, inteso come rapporto delle
energie assorbite nell’intera giornata (nelle 24 ore):
η=
∑ V2k I 2k cos ϕk ∆tk
∑
k
V2k I 2k cos ϕ k +
R T I 22k
∆tk + 24 PFe
,
k
in cui il tempo ∆tk, espresso in ore, rappresenta un intervallo di utilizzazione in
cui le caratteristiche della potenza prelevata sono costanti ed il significato da
89 Macchine elettriche statiche
attribuire agli altri simboli adoperati dovrebbero risultare chiaro da quanto detto
in precedenza.
La condizione di massimo per il rendimento giornaliero sarà del tutto simile a
quella discussa in precedenza. Si osserva, comunque, che il rendimento va tenuto
in ogni caso elevato, avendo cura che non diventi troppo piccolo: in questi casi, si
pensi a un’utenza cittadina durante le ore notturne, si preferisce avere a
disposizione due trasformatori, uno di grande potenza per le ore del giorno, uno
più piccolo per le ore della notte, in modo che quale dei due trasformatori sia in
funzione operi sempre con una corrente secondaria prossima al valore nominale,
cioè a rendimento elevato.
2.9 Prove sui trasformatori
La determinazione indiretta del rendimento comporta la conoscenza esplicita della
potenza perduta nel ferro e nel rame. Per conoscere queste grandezze, ovvero
valutare i parametri trasversali e longitudinali del circuito equivalente del
trasformatore, si usa praticare delle prove sul trasformatore: cominciamo dalla
prova a vuoto.
• Prova a vuoto
Questa prova, schematicamente mostrata in Figura 2.31, viene effettuata lasciando
aperta la porta nel circuito secondario ed applicando al primario la tensione
nominale V1N: il voltmetro posto in parallelo alla porta primaria serve proprio a
verificare che il valore efficace della tensione di alimentazione coincida con la
tensione nominale. In realtà, la parte di alimentazione non è così semplice: si
preferisce usare la normale rete di distribuzione dell’energia elettrica e poi
adattare alle nostre esigenze il valore della tensione usando un autotrasformatore,
di cui si parlerà tra poco. Comunque questo dettaglio non è essenziale per ciò che
stiamo per dire e, pertanto, lo trascureremo.
+
+
V1N
+
W
I2 = 0
V
−
A
90 Macchine elettriche statiche
Figura 2.31: illustrazione della prova a vuoto.
Le misure fornite dall’amperometro e dal wattmetro, che indicheremo
rispettivamente con I0 e P0, sono in grado di fornire i valori dei parametri
trasversali del trasformatore.
Per capire come ciò possa realizzarsi, ricorriamo ancora una volta al modello
semplificato con le perdite resistive tutte al secondario di Figura 2.23, riprodotto,
per quel che qui interessa, in Figura 2.32. Dalla misura del wattmetro e del
voltmetro si può ricavare facilmente il valore del primo parametro trasversale, il
valore della resistenza R0
2
2
P0 = V1N → R0 = V1N .
R0
P0
Inoltre, non è difficile determinare anche il fattore di potenza
P0 = V 1N I 0 cos ϕ 0 → cos ϕ 0 =
P0
.
V1N I 0
Noto l’angolo ϕ 0, è poi semplice valutare la potenza reattiva Q0 e da essa la
reattanza X0 = ω L 0; in formule:
2
2
2
Q0 = P0 tan ϕ 0 = V1N → X0 = V1N → L 0 = V1N .
X0
Q0
ω Q0
*
I0
I1 = 0
I1
+
L0
V1N
−
Iµ
R0
Iρ
Figura 2.32: schema della prova a vuoto.
91 Macchine elettriche statiche
Dunque, la misura illustrata in Figura 2.31 consente di determinare i parametri
trasversali, R0 ed L 0, di un trasformatore; in altri termini, siamo finalmente in
grado di stimare, con ragionevole approssimazione, la potenza PFe, dissipata nel
ferro.
• Prova in cortocircuito
Per valutare le perdite negli avvolgimenti e l’induttanza di dispersione, i cosiddetti
parametri longitudinali del trasformatore, possiamo effettuare un nuovo insieme
di misure, denominato prova in cortocircuito.
+
+
W
I1N
I2
+
V1CC
V
−
A
Figura 2.33: prova di corto circuito su un trasformatore.
Per questa prova si pone in cortocircuito la seconda porta. Si impone alla prima
porta una tensione V1CC , detta tensione di cortocircuito, definita come la tensione
che, con il secondario in cortocircuito, fa circolare al primario la corrente
nominale. Questa tensione è di gran lunga più bassa di quella nominale V1N e
bisogna fare particolare attenzione a partire da tensioni più basse di quella di
cortocircuito e, poi, aumentare il valore poco per volta. Se, sempre con la porta
secondaria in corto circuito, la tensione dovesse malauguratamente superare i
limiti suddetti, è ben far durare la misura il più breve tempo possibile poiché, date
le elevate correnti in gioco, il trasformatore potrebbe subire danni molto seri.
Anche in questa prova si utilizza un autotrasformatore, al quale abbiamo già fatto
cenno nella prova a vuoto, per ridurre la tensione della linea a valori più bassi.
92 Macchine elettriche statiche
I1N
I0 ≅ 0
a2 L T
+
L0
V1CC
−
R0
I1N
Iµ Iρ
a2 RT
Figura 2.34: schema della prova in corto circuito.
Spieghiamo questa prova ricorrendo ancora una volta allo schema semplificato di
Figura 2.23, adattato al caso in esame in Figura 2.34, in cui i parametri
longitudinali della porta secondaria sono stati ricondotti al primario,
moltiplicandoli ovviamente per a2. Notate che i parametri trasversali sono stati
eliminati dallo schema dato che, essendo molto più elevati degli altri, possono
essere considerati dei circuiti aperti.
Dunque, misurata V1CC grazie al voltmetro e la corrente nominale I1N per mezzo
dell’amperometro, la potenza misurata con il wattmetro rappresenta la potenza
attiva assorbita dagli avvolgimenti di rame
PCC = a 2 RT I 21N → RT = PCC .
a2 I 21N
Inoltre, dalla conoscenza del fattore di potenza
PCC = V 1CC I 1N cos ϕ CC → cos ϕ CC =
PCC ,
V1CC I 1N
si può dedurre l’angolo ϕ CC e la potenza reattiva QCC , e da essa la reattanza
XT = ω L T; in formule:
QCC = PCC tan ϕ CC = a 2 XT I 21N → XT = QCC → L T = QCC .
a2 I 21N
ω a2 I 21N
Dunque, la misura illustrata in Figura 2.34 consente di determinare i parametri
longitudinali, RT ed L T, di un trasformatore; in altri termini, siamo finalmente in
93 Macchine elettriche statiche
grado di stimare, con ragionevole approssimazione, la potenza PCu, dissipata negli
avvolgimenti.
Alcune considerazioni prima di terminare.
La prima riguarda la simmetria dei due procedimenti di misura: riguardate quanto
detto sulle due prove e scoprirete una notevole simmetria, negli schemi e nelle
formule. La seconda riguarda la frequenza: un dato che abbiamo implicitamente
usato e non misurato è la frequenza. Gli schemi di misura presentati, pertanto,
vanno completati con un frequenzimetro per misurare la frequenza delle
grandezze alternate, che abbiamo omesso dagli schemi al fine di renderli più
leggibili.
2.10 Caduta di tensione
Per capire quale sia il problema che vogliamo affrontare in questo paragrafo,
ritorniamo allo schema approssimato, secondo Kapp, del trasformatore di Figura
2.23. Nella Figura 2.35 abbiamo riprodotto questo schema di trasformatore chiuso
su un carico generico.
I1
+
+
V1
−
LT
*
I1
I0
a:1
I2
+
E1
E2
−
−
+
Z
RT
V2
−
Figura 2.35: trasformatore chiuso su un generico carico.
Osservate questa figura con attenzione: i parametri trasversi sono stati
rappresentati per mezzo di una generica impedenza e sul carico abbiamo fatto la
convenzione dell’utilizzatore, cambiando l’usuale verso della corrente alla porta
secondaria. Niente di particolarmente complicato: dovreste essere ormai abituati a
questi cambi di convenzione, sempre collegati alla semplificazione della trattazione
che si vuole svolgere.
Se la porta secondaria è a vuoto, la tensione che si misura a questa porta è proprio
E 2; quando, invece, è presente un carico, la tensione assume il valore V2 che
dipende dal carico collegato. La caduta di tensione (∆V) è definita proprio con
riferimento ai valori efficaci di queste tensioni
94 Macchine elettriche statiche
∆V = E2 - V2 ,
e rappresenta la variazione di tensione alla porta secondaria del trasformatore nel
funzionamento a vuoto e sotto carico. Più precisamente, le norme CEI definiscono
caduta di tensione industriale (c.d.t.i.) il rapporto
∆V = 1 - V2 ,
E2
E2
ovvero il suo equivalente percentuale
∆V% = 100 1 - V2 .
E2
Comunque, a parte i simboli e le definizioni, dobbiamo valutare la differenza tra i
moduli delle tensioni a vuoto e sotto un generico carico. Allora, applicando la
LKT alla maglia di uscita, possiamo scrivere:
E 2 = V2 + RT + j ω L T I2 .
Da questa relazione tra fasori dobbiamo estrarre le informazioni relative ai valori
efficaci che ci interessano per calcolare la caduta di tensione: per fare ciò,
l’abbiamo rappresentata graficamente in Figura 2.36. La costruzione che segue
illustra nel piano di Gauss quanto accade nella realtà, ma non aggiunge
informazioni altre informazione alla LKT.
E2
A
O
ϕ
I2
B
D
ϕ
V2
RT I2
C
j X T I2
Figura 2.36: rappresentazione fasoriale della LKT alla maglia di uscita.
Iniziamo a dire che abbiamo supposto la corrente I2 in ritardo, di un certo angolo
ϕ, rispetto alla tensione V2, assumendo un carico di tipo ohmico - induttivo:
95 Macchine elettriche statiche
questa ipotesi non è necessaria, ma è stata fatta per illustrare un caso abbastanza
frequente: per rendervene conto fino in fondo, adattate quanto diremo in questo
paragrafo a un carico di tipo ohmico - capacitivo. Osservate che la tensione RT I2
è parallela alla corrente I2, mentre la tensione j ω L T I2 è in anticipo di π/2,
sempre rispetto alla corrente. La scelta di porre V2 sull’asse reale, anche se in
figura non viene riportato, è del tutto arbitraria.
Consideriamo, ora, la circonferenza di raggio E 2 e facciamola passare per il punto
D del disegno. Ci rendiamo conto che la caduta di tensione è pari alla differenza:
∆V = E2 - V2 = OD - AO = AD .
Tuttavia, nei casi di maggior interesse applicativo, il segmento AD è circa pari a
AC, essendo trascurabile il piccolo segmento CD. Pertanto, possiamo
approssimativamente scrivere
∆V = E2 - V2 = OD - AO = AD ≅ AC .
Ora vedrete come la semplificazione introdotta renda meno complicato il calcolo
della caduta di tensione. Osservando la Figura 2.36 e ricordando le definizioni
delle funzioni trigonometriche seno e coseno, non è difficile scrivere che
AC = R T I 2 cos ϕ + X T I 2 cos π - ϕ = R T I 2 cos ϕ + X T I 2 sen ϕ ,
2
essendo ϕ l’angolo di fase tra il fasore della tensione V2 e quello della corrente.
R2T + X2T
ϕ 2CC
RT
XT
Figura 2.37: impedenza ed angolo di fase.
Se immaginate di eliminare l’impedenza di carico e di sostituirla con un
cortocircuito, indicando con ϕ 2CC la fase dell’impedenza RT + j XT, detto angolo
di cortocircuito, aiutandovi con la Figura 2.37, potete scrivere che
96 Macchine elettriche statiche
sen ϕ 2CC =
RT
XT
, cos ϕ 2CC =
,
2
2
2
+ XT
RT + X T
R2T
e la relazione precedente diventa
AC = R T I 2 cos ϕ + X T I 2 sen ϕ =
= I 2 R2T + X 2T cos ϕ sen ϕ 2CC + sen ϕ cos ϕ 2CC =
= I 2 R2T + X 2T sen(ϕ + ϕ 2CC ) .
Sostituendo questa ultima relazione nella definizione della caduta di tensione,
possiamo, finalmente, scrivere
∆V ≅ AC = = I2 R2T + X 2T sen(ϕ + ϕ 2CC ) .
Questa formula è utile per valutare la caduta di tensione e, quindi, per studiare
quando la ∆V è nulla. Si verifica, facilmente, che la ∆V è nulla nel caso di circuito
aperto alla porta secondaria, quando la corrente I2 è nulla, oppure
∆V = 0 → sen(ϕ + ϕ 2CC ) = 0 → ϕ = - ϕ 2CC .
Ora, dato che, come suggerisce la Figura 2.37, l’angolo di cortocircuito al
secondario vale
ϕ 2CC = arctan RT ,
XT
concludiamo pure che la caduta di tensione è nulla in corrispondenza dell’angolo
di fase
ϕ = - arctan RT .
XT
Riassumendo, dato un carico Z, supposto, per esempio, di tipo ohmico - induttivo,
abbiamo tracciato il grafico della caduta di tensione, abbiamo calcolato una sua
buona approssimazione, dalla quale abbiamo dedotto quando essa si annulla: si
annulla, ovviamente, quando il carico alla porta secondaria è un circuito aperto,
ma si annulla anche quando la porta secondaria è chiusa su un carico particolare,
97 Macchine elettriche statiche
in grado di sostenere un ritardo della corrente rispetto alla tensione proprio pari
all’angolo - ϕ 2CC , l’opposto dell’angolo di cortocircuito al secondario.
Questo era un risultato davvero imprevedibile? Non era del tutto imprevedibile se
ricordate la condizione di adattamento di un carico ad un generatore reale in
regime sinusoidale.
Come vedremo nel volume dedicato agli impianti elettrici, il problema del calcolo
della caduta di tensione è un problema generale che viene risolto secondo le stesse
modalità descritte in questo paragrafo.
2.11 Trasformatori in parallelo
Per capire perché è conveniente disporre due trasformatori in parallelo,
consideriamo una linea di distribuzione dell’energia elettrica, che per semplicità
immagineremo monofase, per mezzo della quale si debba alimentare un generico
carico, come illustrato in Figura 2.38.
+
linea primaria
−
a'
linea secondaria
V1
a"
+
−
V2
Z
Figura 2.38: parallelo di due trasformatori.
È opportuno non affidare il servizio di utenza ad un unico trasformatore per due
motivi: in primo luogo perché in caso di guasto o manutenzione di uno dei due
trasformatori interviene il secondo a garantire la continuità del servizio; in
secondo luogo, richiamando alla memoria quanto detto a proposito del rendimento
dei trasformatori, per cui è opportuno fare lavorare il trasformatore con una
corrente prossima a quella nominale, si conclude immediatamente che, nelle ore di
minor richiesta, la notte ad esempio, è utile far lavorare il solo trasformatore più
piccolo, posto in parallelo al trasformatore più grande, che opera nelle ore di
massimo carico.
98 Macchine elettriche statiche
Per i motivi appena esposti, bisogna studiare questo tipo di collegamento con
l’intento di comprendere quali siano le migliori condizioni di esercizio e quali
caratteristiche debbano possedere i due trasformatori per essere posti
efficientemente in parallelo.
RT
+
a:1
+
V1
+
E2
−
−
+
E 2 = V1
a
−
V2
XT
ZT
−
+
V2
−
Figura 2.39: circuito equivalente visto dal secondario.
Cominciamo col dire che ognuno dei due trasformatori può essere schematizzato
come mostrato in Figura 2.39. Ciò discende dal solito modello semplificato di
Kapp in cui si è considerato la sola maglia di uscita, riportando però al secondario
la tensione di ingresso che vale, appunto
E 2 = V1 .
a
Interessiamoci solo dei secondari dei nostri trasformatori e della ‘linea secondaria’
a cui sono collegati. Il nostro parallelo può, dunque, essere rappresentato come
indicato in Figura 2.40.
Quando l’interruttore è chiuso i due trasformatori sono collegati al carico; nel
caso contrario, funzionano a vuoto. Allora, onde evitare sprechi inutili, la prima
cosa da imporre è che non vi sia circolazione di corrente quando la linea
secondaria è aperta. Quindi la corrente a vuoto, che circola quando l’interruttore è
aperto, deve essere nulla. In questa situazione le correnti varranno:
IZ = 0 , IA = - IB = E A - E B .
ZA + ZB
99 Macchine elettriche statiche
ZA
ZB
+
+
E A = V1
a' −
−
Z
IA
IZ
E B = V1
a"
IB
Figura 2.40: circuito equivalente del parallelo di due trasformatori.
Affinché la corrente IA sia nulla, occorre che
E A = E B → V1 = V1 → a' = a" = a .
a'
a"
In altri termini, se vogliamo porre due trasformatori in parallelo, la prima cosa di
cui dobbiamo preoccuparci è che i rispettivi rapporti di trasformazione siano
uguali; qualora non lo fossero, pagheremmo il prezzo di una corrente non nulla a
carico non collegato. Ora, ammesso pure che i due trasformatori rispettino questa
condizione, una volta che l’interruttore colleghi il carico generico alla rete,
dobbiamo richiedere che entrambi i trasformatori funzionino a pieno carico,
cioè nessuno dei due lavori in condizioni di basso rendimento.
Visto che E A = E B, il circuito equivalente di Figura 2.40 può essere ulteriormente
semplificato, in accordo con il teorema di Thévenin, secondo quanto mostrato in
Figura 2.41.
100 Macchine elettriche statiche
ZA
A
IA
C
+
V1
a
IB
−
ZB
Z
IZ
Figura 2.41: rete semplificata per lo studio del parallelo di due trasformatori.
Funzionare a pieno carico significa che nei trasformatori deve circolare una
corrente prossima a quella nominale, che è proprio la corrente per la quale il
trasformatore è dimensionato e per la quale si ha un rendimento vicino a quello
massimo. Ora, tra le impedenze Z A e Z B, che sono coincidenti con le impedenze di
cortocircuito (se consideriamo, come già abbiamo fatto, i parametri trasversali
coincidenti con un circuito aperto), dobbiamo richiedere che sussista la relazione
VAC = Z A IAN = Z B IBN → Z A = IBN .
Z B IAN
In altri termini, le impedenze di corto circuito devono risultare inversamente
proporzionali alle correnti nominali. Questa condizione può anche essere,
ovviamente, interpretata dicendo che i due trasformatori devono avere la stessa
tensione di cortocircuito. Inoltre, dato che il rapporto tra le potenze apparenti
assorbite dai due trasformatori vale
VAC I AN = IAN = Z B ,
VAC I BN IBN Z A
dobbiamo fare in modo che la corrente del carico IZ si ripartisca tra i due
trasformatori nello stesso rapporto che sussiste fra le rispettive potenze apparenti
nominali.
In conclusione, ad un trasformatore più grande si collega in parallelo un
trasformatore più piccolo, che può intervenire in caso di guasto del più grande, e
viceversa, e, nelle ore di minore richiesta, si può staccare il più grande e fare
lavorare soltanto il più piccolo. In tal modo, riusciamo a non far usurare il più
grande e far lavorare con maggiore rendimento il più piccolo. Risulta chiaro,
101 Macchine elettriche statiche
infine, che si possono collegare in parallelo anche due trasformatori di ugual
potenza.
2.12 Autotrasformatore
Quando non esiste svantaggio nel fatto che il primario e il secondario di un
trasformatore siano isolati e contemporaneamente il rapporto di trasformazione è
approssimativamente contenuto tra 1 e 3, allora è vantaggioso economicamente
fare una sostanziale modifica nella struttura degli avvolgimenti, come indica la
Figura 2.42. La figura indica che in questo caso vi è un solo avvolgimento
concatenato con il nucleo magnetico N, costituito ad esempio da un pacco di
lamierini, e questo avvolgimento costituisce il primario. Il secondario è qui
costituito semplicemente da una parte dell’avvolgimento primario medesimo,
quello che fa capo ai morsetti 2 e 2'. Il rapporto di trasformazione è anche in
questo caso vicino al rapporto spire, ovvero al rapporto fra il numero delle spire
dell’intero avvolgimento e quello interessato dalle derivazioni secondarie che
fanno capo ai morsetti 2 e 2'. Le più usuali applicazioni di questi
autotrasformatori si possono trovare negli impieghi domestici, nei laboratori, ma
anche nelle reti in alta oppure altissima tensione come regolatori della tensione.
1
+
V1
−
1'
N1
+
−
2
V2
2'
Figura 2.42: schema di principio di un autotrasformatore.
Con il termine autotrasformatore si intende indicare un trasformatore costituito
da un unico avvolgimento, una parte del quale è comune al primario ed al
secondario. Alla stregua dei trasformatori ordinari, possono essere sia abbassatori
che elevatori e lo schema di funzionamento è quello di Figura 2.43.
102 Macchine elettriche statiche
I1
+
N1
I2
+
V1
−
N2
IC
V2
Z
−
Figura 2.43: autotrasformatore collegato a un carico generico.
Il numero totale di spire è pari a N1, le spire al secondario sono N2, mentre le
spire attraversate in esclusiva dalla corrente primaria sono N1 - N2. La corrente IC
è la corrente che interessa il tratto comune di spire.
Nella Figura 2.43 si sono trascurati, per semplicità, i parametri longitudinali e
trasversali ed è stata assunta la convenzione dell’utilizzatore sul carico. Le
equazioni che descrivono il funzionamento dell’autotrasformatore, posto
a = N1 ≥ 1
N2
e facendo la convenzione del generatore alla porta secondaria, sono
V1 = a V2 , I2 = a I1 .
La prima uguaglianza definisce l’accoppiamento; la seconda si ricava considerando
il circuito magnetico equivalente (Figura 2.44).
+
N1 - N2 I1
N2 IC
−
+
Φ
ℜ= L
µS
−
Figura 2.44: circuito magnetico equivalente di un autotrasformatore.
103 Macchine elettriche statiche
Applichiamo la seconda legge di Hopkinson:
N1 - N2 I1 + N 2 IC = ℜ Φ .
Dato che
IC = I1 - I2 ,
l’ultima relazione diventa:
N1 - N2 I1 + N 2 I1 - I2 = ℜ Φ → N1 I1 = N 2 I2 + ℜ Φ ,
che, nell’ipotesi di riluttanza del ferro trascurabile, fornisce la relazione richiesta.
• Risparmio in potenza
La differenza fondamentale fra un trasformatore ed un autotrasformatore consiste
nelle perdite per effetto Joule, che per l’autotrasformatore sono inferiori rispetto
a quelle di un normale trasformatore; ciò giustifica la convenienza del suo
impiego quando sussistano le condizioni accennate in precedenza. Infatti, se
consideriamo un trasformatore con N1 spire di resistenza R1 alla porta primaria e
N2 spire di resistenza R2 alla porta secondaria, le perdite resistive, quelle che
abbiamo chiamato perdite ohmiche nel rame, valgono
PTR = P1 + P2 = R 1 I 21 + R 2 I 22 .
Nel caso di un autotrasformatore, alla porta primaria vi sono N1 - N2 spire che
rappresentano una resistenza di valore
R1A = N1 - N2 R1 ,
N1
che assorbe una potenza pari a
P1A = R 1A I 21 = N1 - N2 R1 I 21 = 1 - N2 P 1 = 1 - 1 P 1 .
a
N1
N1
Già da questa relazione si vede con chiarezza che la potenza dissipata da un
autotrasformatore alla prima porta è solo un’aliquota della corrispondente potenza
104 Macchine elettriche statiche
assorbita da un trasformatore. Per renderci conto sino in fondo, se consideriamo
un rapporto di trasformazione a = 1.25, la potenza dissipata al primario sarà:
P1A = 0.2 P1 ,
un quinto di quella che dissiperebbe un normale trasformatore.
Lo stesso discorso si può ripetere per la porta secondaria, in cui abbiamo N2 spire
percorse dalla corrente IC:
R2A = V2 = V2 = V2 = a V2 = a R2 .
IC I1 - I2 1 I2 - I2 1 - a I2 1 - a
a
Allora, la potenza assorbita alla porta secondaria vale
P2A = R 2A I 2C =
a R2 I 22 1 - 1 2 = P2 1 - 1 .
a
a
1-a
Come si deduce con chiarezza dalle due potenze calcolate
PAT = PCu(autotrasformatore) = 1 - 1 P Cu(trasformatore) = 1 - 1 P TR .
a
a
Quest’ultima relazione dimostra che si può avere una diversa potenza assorbita, a
tutto vantaggio dell’autotrasformatore se il rapporto di trasformazione è prossimo
all’unità. Se il rapporto di trasformazione inizia ad aumentare, diventando ad
esempio a = 3, si ha PAT = 0.6 PTR, il guadagno diminuisce rapidamente.
In quel che precede abbiamo, per semplicità, trascurato gli effetti induttivi dei due
avvolgimenti. Il discorso, ovviamente, si può ripetere per la reattanza, ottenendo
lo stesso risultato.
• Risparmio in volume di conduttore
Se indichiamo con L 1 la lunghezza di un solenoide di N1 spire, è chiaro che la
lunghezza del solenoide della porta primaria di una autotrasformatore vale (la
sezione dei fili è ‘S’ in entrambe le situazioni):
L 1A = L1 N1 - N2 = 1 - 1 L 1 .
a
N1
Di conseguenza, il volume di rame necessario per realizzare queste N1 - N2 spire è
105 Macchine elettriche statiche
Volume1A = L1A S = 1 - 1 L 1 S = 1 - 1 Volume1T ,
a
a
ed il risparmio di rame è evidente.
Per la seconda parte del solenoide, il discorso è un po’ diverso. Infatti, poiché
ragioniamo a parità di lunghezza L dei solenoidi, dalla relazione prima dimostrata
tra le resistenze
R2A =
a R2 ,
1-a
discende immediatamente che
ρ L = a ρ L → S 2A = 1 - 1 S2T .
a
S2A 1 - a S2T
Anche in questo secondo caso, dunque, a parità di lunghezza, possiamo usare, nel
caso dell’autotrasformatore, una sezione più piccola, cioè abbiamo un risparmio in
volume di rame usato.
In definitiva, vale, come in precedenza, la relazione
VolumeCu (autotrasformatore) = 1 - 1 VolumeCu (trasformatore) .
a
• Trasparenza per la potenza complessa
Anche l’autotrasformatore è un doppio bipolo trasparente alla potenza complessa.
Questa proprietà, che è tipica del trasformatore, è presto verificata. Dalla sua
definizione discende, infatti, che
*
*
P1 = V1 I1 = a V2 1 I2 = P2 = PP (potenza passante) .
a
Questa potenza passante è la potenza rispetto a cui viene, in genere, dimensionato
un trasformatore normale. Ma per l’autotrasformatore vanno fatte considerazioni
ulteriori. Infatti, è rispetto alle potenza impegnate
*
*
P1-2 = V1 - V2 I1 = V1 I1 1 - 1 = Pp 1 - 1
a
a
*
*
PC = V2 IC = V2 I2 1 - 1 = Pp 1 - 1
a
a
dalle N1 - N2 spire ,
dalle N2 spire in comune ,
106 Macchine elettriche statiche
che vanno dimensionate la parte superiore e inferiore di un autotrasformatore.
Queste potenze, essendo piccole se ‘a’ è prossimo a uno, consentono dimensioni
più piccole dell’autotrasformatore. Diventando sempre minore la richiesta di
potenza nei due tratti, per svolgere il suo compito, un autotrasformatore avrà
bisogno di immagazzinare sempre meno energia nei campi magnetici generati da
solenoidi, cosa che comporta un uso più contenuto sia del rame che del ferro.
Dalle precedenti considerazioni sorge spontanea la domanda: ma, se si risparmia
rispetto alle perdite resistive, se si risparmia in rame e in ferro, allora perché non
usare sempre l’autotrasformatore?
In primo luogo, tutti i vantaggi esaminati risultano sempre più piccoli al crescere
del rapporto di trasformazione ‘a’. Ma, cosa più importante, la mancanza di
isolamento tra primario e secondario mette un contatto ‘fisico’ la prima linea di
alimentazione (rivedete quanto detto a proposito del parallelo dei trasformatori)
con la seconda linea di utilizzazione, collegamento non sempre accettabile perché
causa di danni alle persone e di guasti di impianto.
Gli autotrasformatori non devono essere usati per l’alimentazione di elettroutensili
portatili, come trapani, mole, saldatrici, o di lampade da usarsi in luoghi umidi,
per i quali le norme antinfortunistiche prescrivono una tensione di funzionamento
non maggiore di 50 V, fornita dal secondario di un trasformatore avente il centro
collegato ad una buona terra, in modo da limitare a 25 V la tensione cui può
essere sottoposto l’operatore a seguito di un contatto accidentale tra involucro
esterno dell’apparecchio e parti in tensione. Le norme antinfortunistiche emanate
dal CEI prevedono, inoltre, il collegamento a terra dell’involucro esterno
dell’apparecchio, così come il collegamento a terra di qualsiasi custodia o carcassa
di macchine o di impianti elettrici, mediante un conduttore di terra in rame, di
sezione non inferiore alla sezione di alimentazione. Si raccomanda vivamente
l’applicazione rigorosa e costante di queste norma la cui trasgressione comporta,
purtroppo, quotidianamente elettrocuzioni spesso mortali.
Prima di concludere questo paragrafo dobbiamo fare un cenno ad uno strumento
ampiamente usato nella pratica professionale e di laboratorio. Si tratta di un
particolare autotrasformatore, detto Variac, che ha una rapporto di
trasformazione ‘a’ nell’intervallo 1 ÷ 3, che è costituito da un avvolgimento
disposto su un nucleo ferromagnetico toroidale. La tensione primaria viene
applicata, nel caso di un trasformatore abbassatore ad esempio, ai morsetti della
estremità dell’avvolgimento complessivo; la tensione secondaria viene prelevata
tra uno dei due morsetti precedenti e in contatto strisciante la cui posizione
determina il rapporto di spire e, dunque, il rapporto di trasformazione.
107 Macchine elettriche statiche
2.13 Notizie sulla costruzione
Per ragioni tecnologiche e per motivi connessi al rendimento ed alle tensioni di
cortocircuito, un trasformatore non è quasi mai realizzato come rappresentato in
Figura 2.6. In primo luogo, il nucleo non è realizzato in ferro massiccio, ma è
costituito da pacchi di lamierini in lega di ferro e silicio, con una percentuale di
silicio nella misura dal 3% al 5%, ad alta permeabilità magnetica e bassa cifra di
perdita (0.5 - 1.5) W/kg, dello spessore che va da qualche decimo fino ad un
millimetro. Sappiamo che le perdite nel ferro per correnti parassite dipendono
delle dimensioni della sezione normale alle linee di flusso, ed in questo caso dal
quadrato dello spessore dei lamierini; la misura di 0.35 mm, che è stata assunta,
rappresenta un compromesso tra la necessità di avere, da un lato, un costo di
produzione non troppo alto, come pure una discreta resistenza meccanica, e
dall’altro perdite nel ferro relativamente basse. Generalmente le perdite per
isteresi e le perdite per correnti parassite stanno fra loro rispettivamente nel
rapporto da 3:1 a 4:1. Le forme di nucleo più diffuse sono a colonna (Figura
2.45), o corazzato (Figura 2.46).
2
2'
1
1'
Figura 2.45: nucleo a colonna.
Per ottenerle, i lamierini sono tranciati opportunamente in più pezzi, verniciati
con una sostanza isolante e successivamente accostati in modo che il piano di
laminazione sia parallelo alle linee di flusso.
108 Macchine elettriche statiche
1
2
1'
2'
Figura 2.46: nucleo corazzato.
La sezione trasversale delle porzioni verticali dei nuclei, dette colonne, è di forma
quadrata, rettangolare oppure a gradini, inscritta in un cerchio con il massimo di
area utile: come esempio di sezione a gradini osservate la Figura 2.47.
La sezione trasversale delle porzioni orizzontali, dette gioghi, è generalmente
rettangolare. I lamierini sono pressati con forza per mezzo di legature, morse
pressa - pacchi o bulloni passanti, opportunamente isolati.
Figura 2.47: sezione di una colonna di trasformatore.
Gli avvolgimenti sono generalmente disposti intorno alle colonne in modo da
rendere il valore assoluto del coefficiente di accoppiamento quanto più possibile
vicino al valore limite 1. Il coefficiente di accoppiamento, definito come il
rapporto
109 Macchine elettriche statiche
-1≤k=
M ≤1,
L1 L 2
è un numero reale, in valore assoluto minore dell’unità, che rappresenta una
misura del grado di accoppiamento di due circuiti. Quando |k| = 1, si è in
condizioni di accoppiamento perfetto.
In ogni caso, le disposizioni tipiche sono le due seguenti:
a) disposizione concentrica, nella quale gli avvolgimenti sono montati con lo
stesso asse ma con diametro diverso, come in Figura 2.48;
1
2
2'
1'
Figura 2.48: disposizione concentrica.
b) disposizione alternata, nella quale gli avvolgimenti, suddivisi in bobine
parziali di forme discoidale, hanno diametri uguali e sono montati sullo stesso
asse, con bobine appartenenti al primario ed al secondario alternativamente
disposte lungo le colonne, come mostrato in Figura 2.49.
1
2
1'
2'
Figura 2.49: disposizione alternata.
110 Macchine elettriche statiche
Ovviamente, nell’uno e nell’altro caso, gli avvolgimenti sono opportunamente
distanziati sia per questioni di isolamento, sia per lasciare il posto al passaggio di
fluidi refrigeranti: si ricorda, infatti, che sia gli avvolgimenti, sia il circuito
magnetico sono sede di perdite, con conseguente generazione di quantità di calore
che devono essere smaltite per evitare che la temperatura raggiunga valori tali da
danneggiare l’isolamento. Nel caso di piccoli trasformatori (potenze fino a qualche
decina di chilovoltampere) e per basse tensioni, il fluido refrigerante è
semplicemente l’aria. Viceversa, per potenze maggiori e per tensioni elevate si
ricorre all’olio minerale per trasformatori, il quale unisce alle proprietà termiche
notevoli ed efficaci proprietà elettriche (elevata rigidità). In quest’ultimo caso il
trasformatore è posto in un cassone per il contenimento dell’olio, il quale potrà
avere superfici esterne lisce, nel caso di minori potenze, superfici alettate oppure a
tubi, nel caso di potenze maggiori, ed addirittura potrà avere scambiatori di calore
ad aria oppure ad acqua, per potenze superiori a qualche megavoltampere.
2.14 Trasformatori per usi speciali
In questo paragrafo passeremo in rapida rassegna alcuni tipi molto usati di
trasformatori che, per l’uso che se ne fa, hanno assunto caratteristiche costruttive
particolari.
• Trasformatori di misura
Sulle grandi linee di trasmissione dell’energia elettrica vi è spesso la necessità di
effettuare la misura di tensioni e correnti il cui valore efficace è ampiamente
superiore al limite offerto dal fondo scala degli strumenti comunemente
disponibili. Nel caso delle medie e delle alte tensioni, poi, si aggiungono anche
problemi di sicurezza. È opportuno, quindi, ricorrere all’ausilio di trasformatori
dal rapporto di trasformazione particolare per riportare entro limiti ‘ragionevoli’
tensioni e correnti troppo elevate per effettuare direttamente le misure.
In generale i trasformatori di misura hanno caratteristiche particolari necessarie
per rendere la misura quanto più fedele possibile al dato ‘vero’. I carichi al
secondario sono in genere rappresentati da strumenti di misura, amperometri con
fondo scala massimo 5 A e voltmetri con fondo scala massimo di 0.5 kV. Tali
trasformatori in genere possono essere di corrente TA e di tensione TV.
Trasformatori di corrente TA
Si tratta di un trasformatore monofase, illustrato in Figura 2.50, con il primario
collegato in serie con la linea sulla quale circola la corrente da misurare, mentre il
111 Macchine elettriche statiche
secondario è chiuso su un amperometro. Il rapporto di trasformazione risulta ‘in
discesa’ per la corrente ed ‘in salita’ per la tensione.
Linea primaria
A
Figura 2.50: inserzione di un TA.
In realtà la misura non è così semplice poiché, se ci riferiamo ad un trasformatore
reale
I1 = - 1 I2 + I0 ,
a
la presenza della corrente a vuoto I0 può falsare la proporzionalità tra corrente
primaria e secondaria e può introdurre un errore nella misura del valore efficace
della corrente. Sempre a causa della corrente a vuoto, le due correnti, primarie e
secondarie, non sono in fase e ciò causa anche un errore di angolo che può essere
fonte di non poche incertezze nel calcolo della potenza sulla rete, per la
conoscenza della quale bisogna conoscere lo sfasamento tra corrente e tensione.
Quindi per rendere trascurabili tali errori occorre rendere trascurabile la
corrente a vuoto, ad esempio usando al secondario sempre lo stesso amperometro
si può tarare la scala dello strumento in modo da tenere, in qualche misura, in
conto l’errore. Esistono anche TA trifasi.
Trasformatori di tensione TV
Osservate con attenzione la Figura 2.51.
112 Macchine elettriche statiche
Linea primaria
V
Figura 2.51: inserzione di un TV.
I trasformatori di tensione vengono inseriti in parallelo sulla linea della quale si
vuole conoscere la tensione. Anche i trasformatori di tensione indipendentemente
dal rapporto teorico di trasformazione, sono caratterizzati da un rapporto
effettivo fra la tensione di ingresso e quella di uscita dipendente dalle specifiche
condizioni di impiego. Il rapporto nominale è anche in questo caso quello fornito
dal costruttore. A causa della non idealità del trasformatore, così come per il TA,
anche la misura con il TV è affetta da un errore di rapporto e di angolo che
dipendono dalla caduta di tensione nella resistenza e sulla reattanza equivalenti del
trasformatore; le tensioni primarie e secondarie non sono né perfettamente in fase,
né in opposizione di fase ed il loro rapporto non coincide con il rapporto di spire.
Per ridurre gli errori occorre ridurre le resistenze interne, aumentando la sezione
dei conduttori e ridurre le reattanze di dispersione.
Esistono anche TV trifasi.
Un uso simultaneo di un TA e di un TV consente il collegamento ad un wattmetro
per la misura della potenza.
La Tabella che segue indica i modi di inserzione, funzionamento e protezioni dei
trasformatori di misura.
TA
TV
Inserzione sulla linea
Funzionamento
Primario in serie
Primario in derivazione
Protezioni
Valvole
fusibili
Quasi in corto circuito: alimenta Quasi a vuoto: alimenta
un’impedenza molto bassa.
un’impedenza molto elevata.
di
tensione,
mai Fusibili sul primario e sul
secondario
113 Macchine elettriche statiche
Le protezioni sono dispositivi speciali, il cui approfondimento avverrà quando
studierete gli Impianti Elettrici, capaci di proteggere il circuito qualora le tensioni
o le correnti assumessero valori tali da danneggiare i suoi diversi componenti.
• Trasformatori di potenza
Hanno il compito di innalzare la tensione all’uscita delle centrali elettriche dai
valori tipici di produzione dell’ordine di decine di chilovolt a centinaia di
chilovolt, allo scopo di ridurre la corrente sulle linee e, quindi, la dissipazione
energetica.
• Trasformatori di isolamento o separatori
Si tratta di trasformatori a rapporto unitario che hanno l’unica funzione di evitare
che un carico sia metallicamente collegato alla rete di alimentazione.
• Trasformatori a flusso disperso
Sono particolari trasformatori usati per saldatura, per giocattoli e per impianti al
neon. Sono dotati di un’elevata impedenza interna che li protegge in caso di
cortocircuito. La dispersione del flusso con cui si ottiene l’alta impedenza interna
è realizzata per mezzo di un giogo di dispersione che consiste in una colonna di
materiale ferromagnetico, dotata di due traferri, in grado di ruotare.
• Trasformatori a corrente costante
Nell’illuminazione stradale è importante mantenere costante la corrente al variare
del carico, consistente in uno o più corpi illuminanti posti in serie: per questo
scopo vengono adoperati i trasformatori a corrente costante. Alla rottura di una
lampada, il circuito non si interrompe, ma il trasformatore deve adeguare la
propria tensione di uscita per mantenere costante la corrente. L’aumento per
qualche istante della corrente di carico, causato dalla diminuzione delle lampade,
comporta un aumento della forza di repulsione tra gli avvolgimenti e ciò produce
una variazione della reattanza di dispersione. La f.e.m. e la corrente, a causa della
variazione di questa reattanza, si riportano ai valori stabiliti.
• Trasformatori a più avvolgimenti
Presentano un primario e più secondari a diversi valori di tensione.
• Trasformatori a prese
Hanno la possibilità di variare la tensione di uscita, oppure di ingresso, spostando
la connessione dei conduttori.
114 Macchine elettriche statiche
• Adattatori o traslatori di impedenza
Tale trasformatore ha lo scopo di permettere a generatori di piccola potenza di
funzionare in condizioni di adattamento, o quasi. Ciò vuol dire trasferire la
massima potenza attiva del carico, e una potenza reattiva più piccola possibile, al
limite nulla. Per fare ciò, si collega il generatore al primario di trasformatore con
un rapporto di trasformazione tale da realizzare l’adattamento dell’impedenza del
carico.
2.15 Trasformatori trifasi
Tutto lo sviluppo di questo capitolo è incardinato sul trasformatore monofase; non
dobbiamo dimenticare, tuttavia, che l’energia elettrica viene prodotta da
generatori trifasi per essere trasmessa e distribuita su linee elettriche trifasi.
Quindi, una volta capito come funziona il trasformatore, è opportuno fare un
cenno per capire come funziona un trasformatore trifase. Nella realtà, al fine di
risparmiare energia, la tensione di uscita dei generatori delle centrali di
produzione viene innalzata fino a diverse centinaia di chilovolt grazie a
trasformatori trifasi allo scopo di ridurre in maniera proporzionale le correnti
sulla linea. Si ricordi infatti che le perdite resistive vanno con il quadrato del
valore efficace della corrente, per cui, abbassando le correnti sulle linee, si
riducono tali perdite. Giunta poi in prossimità delle utenze, la tensione viene
nuovamente abbassata ai livelli di utilizzazione. Tutto ciò si realizza per mezzo di
trasformatori trifasi.
È ovvio che, per trasformare un sistema trifase di tensioni e correnti, si può
ricorrere a tre trasformatori monofasi indipendenti, uno per ogni fase, con gli
avvolgimenti primari fra loro collegati a stella o a triangolo, e così pure i
secondari, oppure si può ricorrere a un trasformatore trifase propriamente detto,
avente un unico circuito magnetico con un opportuno numero di rami fra loro
interconnessi, e gli avvolgimenti sempre collegati come già detto.
• Circuiti magnetici
Se un trasformatore trifase è connesso in un sistema equilibrato e simmetrico, tutte
le terne di grandezze omogenee in esso presenti sono tali da avere, istante per
istante, somma zero, ovvero sono rappresentabili in regime sinusoidale da terne
simmetriche di vettori. Ciò dunque accade per i tre flussi principali, che
indicheremo con Φ1, Φ2 e Φ3, per i quali vale la relazione
Φ1 + Φ2 + Φ3 = 0 .
115 Macchine elettriche statiche
Nella Figura 2.52 e nelle successive, i rami del circuito magnetico sono stati
rappresentati con linea a tratto e punto, mentre gli avvolgimenti elettrici, alla
porta primaria ed a quella secondari, ad essi concatenati vengono indicati con una
sola spira: il tutto per ragioni di semplicità grafica.
1
2
3
1'
2'
3'
Φ1
Φ2
Φ3
Figura 2.52: trasformatore a tre colonne.
La Figura 2.52 rappresenta schematicamente un trasformatore trifase con nucleo
(o circuito magnetico) cosiddetto a tre colonne. La Figura 2.53 rappresenta,
invece, un analogo trasformatore con nucleo a cinque colonne, detto anche
corazzato. Sempre per semplicità, gli avvolgimenti sono ora indicati senza
collegamenti fra loro.
Nel nucleo a tre colonne l’annullamento della somma dei tre flussi è imposto dalla
struttura stessa del circuito magnetico, anche se il sistema non è equilibrato e
simmetrico, qualora si trascuri l’eventuale piccolo flusso che si può chiudere
attraverso l’aria fuori dalle colonne. Nel nucleo a cinque colonne, invece, questa
relazione di annullamento non è generalmente verificata se il sistema trifase non è
equilibrato e simmetrico, ed è proprio per questa circostanza che le particolari
proprietà del nucleo a cinque colonne sono talvolta preferite.
116 Macchine elettriche statiche
1
2
3
1'
2'
3'
Φ1
Φ2
Φ3
Figura 2.53: trasformatore corazzato.
Mediante l’analogia fra circuiti elettrici e circuiti magnetici, si può comprendere
facilmente che un nucleo a tre colonne è analogo ad un circuito elettrico con
collegamento stella - stella senza neutro, mentre un nucleo a cinque colonne è
pressoché analogo a un circuito elettrico con collegamento stella - stella con
neutro; in quest’ultimo caso l’analogia è ovviamente approssimata, perché la rete
magnetica di Figura 2.53 ha addirittura sei nodi anziché due, tuttavia si intuisce
che le colonne laterali estreme svolgano la funzione del neutro.
In verità, per la perfetta simmetria di tutte le grandezze presenti nei trasformatori
trifasi, anche le riluttanze equivalenti viste dai flussi Φ1, Φ2 e Φ3 dovrebbero
essere uguali fra loro: ciò non accade nel nucleo a tre colonne, ove la colonna
centrale presenta riluttanza minore di quelle laterali che hanno in serie i gioghi;
ciò non accade neppure nel nucleo a cinque colonne, ove esiste addirittura una rete
magnetica più complessa, seppure non equilibrata; gli squilibri, dovuti alla
ineguaglianza delle riluttanze magnetiche, costituiscono un problema di seconda
approssimazione agli effetti elettrici, se si pensa che le riluttanze sono comunque
piccole. Volendo un nucleo perfettamente equilibrato nelle riluttanze, esso
dovrebbe assumere la forma di Figura 2.54 e la colonna centrale AB, che svolge la
funzione di neutro, potrebbe essere assente o presente.
117 Macchine elettriche statiche
A
2
3
2'
3'
1
Φ2
Φ3
1'
B
Φ1
Figura 2.54: trasformatore a tre colonne con ‘neutro’.
• Collegamenti fra avvolgimenti
Gli avvolgimenti primari e quelli secondari possono essere collegati in vario
modo. Schemi tipici di collegamento sono, ad esempio:
avvolgimenti primari collegati a stella e secondari collegati a stella;
avvolgimenti primari collegati a triangolo e secondari collegati a triangolo;
avvolgimenti primari collegati a triangolo e secondari collegati a stella;
avvolgimenti primari collegati a stella e secondari collegati a triangolo.
I collegamenti degli avvolgimenti primari vengono indicati da una lettera
maiuscola, ad esempio, D per il collegamento a triangolo e Y per il collegamento a
stella, mentre i collegamenti degli avvolgimenti secondari sono indicati da una
lettera minuscola, ad esempio, d oppure y.
Le terne delle tensioni concatenate, primarie e secondarie, possono essere, quindi,
sfasate tra loro. Tale sfasamento viene assegnato in termini di gruppo, g, pari allo
sfasamento, ritardo espresso in gradi, delle tensioni concatenate secondarie rispetto
alle tensioni concatenate primarie, diviso 30°. Gli schemi di collegamento
raccomandati dalle norme CEI sono i gruppi 0, mostrato in Figura 2.55, e 11,
mostrato in Figura 2.56.
118 Macchine elettriche statiche
B
Dd0
B
A
B C
a
C
c
b
b
C a
A
A
c
B
a
b
c
b
Yy0
C a
A
c
Figura 2.55: gruppo 0 (spostamento angolare 0°).
A
C
a
a
b
c
b
b
B
Dy11
B
c
C a
A
A
B
B C
c
b
Yd11
c
A
C
a
Figura 2.56: gruppo 11 (spostamento angolare 330°).
Tuttavia, le stesse norme CEI consigliano anche i gruppi 5, riportato in Figura
2.57, e 6, schematizzato in Figura 2.58. Se il collegamento è a stella, può esistere
o meno il conduttore neutro.
Spesso accade che il collegamento degli avvolgimenti primari o secondari di un
trasformatore trifase possono essere eseguiti all’esterno dell’involucro del
trasformatore stesso, presso la cosiddetta morsettiera.
119 Macchine elettriche statiche
A
B
C
a
B
c
Dy5
A
C
b
a
A
B
c
b
B C
a
c
Yd5
A
b
C
a
c
b
Figura 2.57: gruppo 5 (spostamento angolare 150°).
A
B
c
B
C
a
Dd6
A
C
b
a
A
B
c
c
b
B C
a
Yy6
A
C
b
a
b
c
Figura 2.58: gruppo 6 (spostamento angolare 180°).
In tal caso gli estremi di ciascun avvolgimento sono saldati ciascuno a un bullone
come indica la Figura 2.59. Il collegamento può essere eseguito inserendo
opportunamente piastrine metalliche fra i bulloni e serrandole con dadi filettati;
con simili dadi si collegano anche i conduttori di partenza o di arrivo della linea
elettrica. Le Figure 2.59b e 2.59c mostrano i collegamenti rispettivamente a stella
ed a triangolo.
120 Macchine elettriche statiche
a)
b)
c)
Linea
Linea
Figura 2.59: morsettiera.
Poiché in condizioni nominali è fissata la tensione ai capi di ogni avvolgimento,
strettamente legata al flusso concatenato, cambiando il collegamento da triangolo a
stella e viceversa, si può variare la tensione concatenata in linea nel rapporto da 1
a 3 o viceversa, e mantenere così il flusso al valore nominale previsto. Ciò vale
sia per il primario, sia per il secondario. Vale la pena accennare anche al fatto che
talvolta l’avvolgimento primario e/o secondario su una colona di un trasformatore
trifase è suddiviso in due sezioni che si possono collegare in serie o in parallelo.
È opportuno segnalare che talvolta gli avvolgimenti primari e/o secondari possono
essere collegati secondo uno schema cosiddetto a zigzag (simbolo Z per il
primario, z per il secondario). Tale collegamento è riportato in Figura 2.60.
121 Macchine elettriche statiche
Figura 2.60: collegamento a zig - zag.
A titolo di esempio, si riporta lo schema Dz6.
A
B
A
C
a
c
C
B
b
a
b
c
Figura 2.61: lo schema Dz6.
• Circuiti equivalenti e loro interpretazioni
Poiché nella maggioranza dei casi i trasformatori trifasi si usano in sistemi
simmetrici ed equilibrati, si può fare riferimento al circuito equivalente relativo a
una singola fase, ritenendo che per altre fasi il circuito equivalente sia identico, a
parte l’angolo di fase di tutte le grandezze in esso rappresentate, che subisce un
incremento di ± 2π/3. Come schemi completi o semplificati si usano così tutti
quelli che abbiamo indicato nei precedenti paragrafi.
122 Macchine elettriche statiche
È bene precisare che il circuito equivalente di una fase si riferisce generalmente
per convenzione a un singolo avvolgimento (o serie, o parallelo di due sezioni di
avvolgimento nel caso dello zigzag e simili); che poi il collegamento degli
avvolgimenti sia a stella oppure a triangolo verrà precisato a parte. Pertanto, nel
circuito equivalente la coppia di grandezze V1 ed I1, o V2 ed I2, indicheranno
ancora, rispettivamente, quelle del primario o del secondario e saranno una
tensione stellata ed una corrente di linea, a seconda che il collegamento sia a
triangolo oppure a stella.
Tutte le potenze che si leggono nel circuito equivalente, potenza entrante al
primario, perdite nel ferro, perdite nel rame, potenza uscente al secondario,
devono essere moltiplicate per 3 al fine di ottenere le corrispondenti potenze
complessive nel trasformatore trifase.
2.16 Dati di targa
Un trasformatore è definito da una serie di dati specifici, che vengono riportati
sulla targhetta metallica ad esso collegata; ad esempio, sulla targa si può trovare il
contrassegno CEI, il nome del costruttore ed il numero di identificazione.
Generalmente i dati specifici sono i seguenti, anche se non sono sempre tutti
riportati sulla targa.
• Numero delle fasi e tipo di collegamento
Se monofase, basta questo aggettivo; se trifase, si deve dire come sono collegati gli
avvolgimenti, cioè se essi sono a stella, a triangolo oppure a zigzag, indicati con le
lettere maiuscole, Y, D e Z, per il primario, con le lettere minuscole, d, y, z, per
il secondario. A queste due lettere segue un numero intero (gruppo) che indica
convenzionalmente lo sfasamento (ritardo) in gradi e diviso per 30° della tensione
concatenata secondaria rispetto alla corrispondente primaria, quale viene
determinato dai collegamenti indicati prima.
• Tensione nominale primaria e secondaria
Per i trasformatori monofase, le tensioni nominali V1N e V2N sono definite. Per
quelli trifasi esse sono sempre intese come tensioni concatenate, qualunque sia
il collegamento effettuato fra gli avvolgimenti; se è prevista una commutazione di
collegamenti, si indicano i valori nominali relativi a ciascun collegamento, tenendo
presente che la tensione nominale relativa ad un singolo avvolgimento ha un unico
valore fisso.
• Corrente nominale primaria e secondaria
123 Macchine elettriche statiche
Per i trasformatori monofasi, le correnti nominali I1N e I2N sono definite. Per
quelli trifasi esse sono sempre intese come correnti di linea, qualunque sia il
collegamento effettuato fra gli avvolgimenti; se è prevista una commutazione di
collegamenti, si indicano i valori nominali relativi a ciascun collegamento, tenendo
presente che la corrente nominale relativa a un singolo avvolgimento ha un unico
valore fisso.
• Potenza nominale
Essa è intesa come potenza apparente nominale resa, cioè uscente dal
secondario in condizioni nominali; per un trasformatore monofase essa è
A2N = V 2N I 2N ,
mentre per un trasformatore trifase è
A2N = 3 V2N I 2N .
• Fattore di potenza nominale
Esso è da intendersi come cos ϕ 2N; con questo dato e con i precedenti si deduce la
potenza attiva nominale resa. Dato il trasformatore con le sue resistenze e
reattanze, conoscendo V2N I 2N e cos ϕ 2N, le grandezze nominali primarie V1N e I1N
(ed eventualmente il cos ϕ 1N) risultano dipendenti dalle secondarie.
• Frequenza nominale
Essa è generalmente fN = 50 Hz per gli impianti di terra ferma in Europa. Per
impianti a bordo di aeromobili la frequenza nominale è sovente fN = 400 Hz. Per i
trasformatori che alimentano gli altoparlanti si ha poi tutta una gamma di
frequenze: quelle tipiche della voce umana o degli strumenti musicali.
• Rapporto spire
Esso coincide con il rapporto fra le tensioni del primario e del secondario a vuoto,
oppure con il rapporto fra le correnti secondaria e primaria in cortocircuito.
• Tensione di cortocircuito
Essa è stata definita in precedenza e la stessa definizione vale anche per i
trasformatori trifasi.
• Rendimento in condizioni normali
124 Macchine elettriche statiche
Il suo valore può variare da 0.90, nel caso di trasformatori di piccola potenza, a
0.995, per quelli di grande potenza.
• Natura del servizio
Può accadere che un trasformatore debba funzionare con tensioni e correnti
nominali continuative, ovvero per tempo indefinito, arbitrariamente lungo; la
targa indica allora ‘per servizio continuativo’. Può invece accadere, come quando
si alimentano saldatrici, puntatrici o cucitrici, che il trasformatore debba
funzionare in servizio con tensioni e correnti nominali per un periodo di tempo T S
relativamente breve, alcuni secondi o minuti, seguito da un altro periodo T 0 di
funzionamento a vuoto. In tal caso il trasformatore si dice adatto per servizio
intermittente e si definisce rapporto di intermittenza la quantità
r=
TS .
TS + T0
La targa riporta il valore nominale r N di questo rapporto. Se, pur con tensioni e
correnti nominali, un trasformatore per sevizio intermittente funziona con r > r N
o addirittura con r = 1, cioè in servizio continuativo, esso può raggiungere
temperature pericolose per la buona conservazione dei suoi materiali componenti.
Per concludere, si ricorda che non devono essere mai superati i valori nominali
della tensioni, delle correnti, ed eventualmente del rapporto di intermittenza, per
far in modo che le perdite nel ferro e nel rame, separatamente, non superino i
rispettivi valori limite. Il non superare semplicemente la potenza nominale non
costituisce ovviamente di per sé una sufficiente garanzia.
2.17 La diagnostica
Anche se il trasformatore è una macchina caratterizzata da malfunzionamenti non
molto frequenti, è possibile rilevare un aumento della temperatura dell’olio: ciò
può dipendere da sovraccarico oppure da una cattiva ventilazione.
Se la macchina risultasse rumorosa, bisogna controllare il serraggio dei dadi sul
nucleo oppure il valore dell’induzione alla quale il trasformatore sta operando,
induzione che potrebbe risultare eccessiva.
Il cortocircuito tra spire o tra avvolgimenti fa intervenire il relè Buchholz che
viene usato proprio per questo scopo e che è posto sopra il trasformatore,
intervenendo quando la macchina, a causa di cortocircuiti interni, sviluppa gas.
L’intervento del relè avviene in due fasi: con la prima si avvisa acusticamente
125 Macchine elettriche statiche
l’operatore della presenza del guasto; con la seconda, se il guasto continua, il
trasformatore viene scollegato.
2.18 Simboli grafici
Negli schemi dei circuiti elettrici è consueto usare segni grafici particolari per
indicare i trasformatori monofasi e trifasi. La Figura 2.62a indica un
trasformatore monofase, mentre in 2.62b viene indicato uno trifase con un
particolare tipo di collegamento (triangolo - stella con neutro).
∆
a)
b)
Figura 2.62: simboli grafici per trasformatori.
La Figura 2.63a indica un autotrasformatore monofase, mentre la Figura 2.63b
rappresenta un autotrasformatore trifase: si osservi che negli autotrasformatori
trifasi non esistono varietà di collegamenti.
a)
b)
Figura 2.63: simboli grafici per autotrasformatori.
126 Macchine elettriche statiche
Appendice: sforzi elettrodinamici negli avvolgimenti
Quando gli avvolgimenti di un trasformatore sono percorsi da elevate correnti, tra
le varie spire possono manifestarsi delle azioni elettrodinamiche che, se non sono
tenute sotto controllo, possono danneggiare, o comunque alterare, il
funzionamento della macchina. In questa appendice vogliamo tracciare una linea
che può aiutare chi volesse determinare questi sforzi.
Consideriamo un conduttore rettilineo di lunghezza L, percorso dalla corrente i.
Sappiamo che, se questo filo viene immerso in un campo esterno B, esso risente di
una forza, mostrata in Figura A.1, data dalla relazione
F=iLτ×B,
dove τ è un vettore unitario (versore) diretto come il filo ed orientato secondo la
direzione della corrente.
B
i
F
τ
Figura A.1: filo percorso da corrente in un campo magnetico.
Detto ciò, prendiamo in considerazione due fili rettilinei e paralleli, percorsi dalle
correnti i1 e i2, posti ad una certa distanza D. Il primo conduttore sostiene nello
spazio circostante un campo magnetico ed il modulo del vettore induzione
magnetica, valutato in corrispondenza nei punti del secondo conduttore, si può
calcolare per mezzo della formula
B1 = µ0 i1 .
2πD
In questo campo si trova immerso il secondo conduttore che, per un tratto di
lunghezza L, sarà sollecitato dalla forza
F2 = i2 B1 L = µ0 L i 1 i 2 .
2πD
127 Macchine elettriche statiche
a)
F1 F2
i1
b) F1
i2
D
F2
i1
i2
D
Figura A.2: azioni elettrodinamiche tra due fili percorsi da corrente.
Questa espressione stabilisce che la forza elettrodinamica che agisce tra due
conduttori è proporzionale al prodotto delle correnti che li attraversano. Se i due
conduttori sono attraversati dalla stessa corrente, la precedente relazione stabilisce
che la forza che agisce tra i conduttori è proporzionale al quadrato della corrente.
Inoltre, quanto detto con riferimento al campo prodotto dal primo filo può essere
ripetuto in maniera duale per quello sostenuto dal secondo. Tuttavia, se le due
correnti hanno lo stesso verso, come in Figura A.2a (dove con il punto abbiamo
indicato due correnti che escono dal foglio del disegno), i due fili si
respingeranno; invece, se le due correnti, come in Figura A.2b (dove con la croce
abbiamo indicato una corrente che entra dal foglio del disegno), hanno verso
contrario, i due fili si attrarranno.
Ricordiamo che 1 A equivale alla corrente che deve circolare nei due fili distanti
un metro affinché si attraggano con una forza 2 ⋅ 10 -7 N.
Anche un avvolgimento, percorso da corrente, genera un campo magnetico e,
quindi, le varie spire che costituiscono gli avvolgimenti di un trasformatore sono
soggette ad una azione elettrodinamica mutua. In particolare, consideriamo tre
spire contigue; quella centrale, la spira 2 di Figura A.3, verrà attratta sia da quella
superiore, la spira 1, che da quella inferiore, la spira 3. Dunque, queste azioni
elettrodinamiche tra spire contigue tendono ad equilibrarsi.
1
F1
2
3
F3
Figura A.3: forze esercitate sulla spira centrale.
128 Macchine elettriche statiche
Tuttavia gli avvolgimenti dei trasformatori sono fatti in maniera concentrica
(riguardate la Figura 2.48): attorno ad una colonna sono avvolti sia gli
avvolgimenti del primario che del secondario, e le correnti in esso circolano in
versi opposti. Si intuisce, allora, che il pacco di spire più esterno tende ad
allargarsi, mentre quello più interno a contrarsi sulla colonna. In realtà, i due
pacchi di spire, lavorando in regime sinusoidale, finiscono per sollecitarsi
vicendevolmente a sforzi di compressione e di trazione.
Queste considerazioni fanno comprendere perché l’avvolgimento deve potere
contare su appoggi sufficientemente robusti, tali da poter sopportare queste azioni
elettrodinamiche che, ad esempio in caso di cortocircuito, possono causare anche
la distruzione del trasformatore.