Esperimentazioni di Fisica 3
AA 2010-2011
“Tracking ADC”
M. De Vincenzi
1
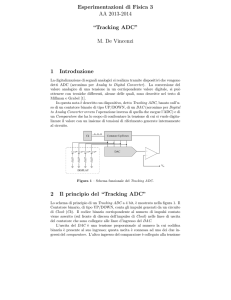
Introduzione
La digitalizzazione di segnali analogici si realizza tramite dispositivi che vengono
detti ADC acronimo che deriva dalle iniziali delle parole contenute nell’espressione inglese Analog to Digital Converter. La conversione del valore analogico
di una tensione al valore corrispondente digitale si può ottenere con tecniche
differenti alcune delle quali, le più comuni, sono descritte in [Millman] al quale
si rimanda per i dettagli.
In questa nota descriviamo una tecnica di conversione, detta Tracking ADC,
basata sull’uso di un contatore di tipo UP/DOWN, di un DAC (altro acronimo
che deriva da Digital to Analog Converter ovvero l’operazione opposta a quella
che esegue l’ADC) e di un Comparatore che ha lo scopo di confrontare la tensione
di cui si vuole digitalizzare con un insieme di tensioni di riferimento generate
internamente al circuito.
Ck
Contatore Up/Down
DAC
+
−
Vx
DISPLAY
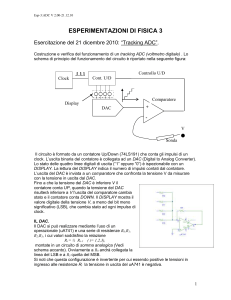
Figura 1 – Schema funzionale del Tracking ADC.
2
Il principio del “Tracking ADC”
Lo schema di principio del circuito di questo ADC è mostrato nella figura 1. Il
Contatore binario, di tipo UP/DOWN, conta gli impulsi generati da un circuito
di Clock (Ck). Il codice binario del numero di impulsi contato viene asserito
(sul fronte di discesa dell’impulso di Clock) nelle linee di uscita del contatore
che sono collegate alle linee d’ingresso del DAC.
L’uscita del DAC è una tensione proporzionale al numero la cui codifica
binaria è presente al suo ingresso; questa uscita è connessa ad uno dei due
ingressi del comparatore. L’altro ingresso del comparatore è collegato a un
punto che è alla tensione analogica (Va ) che si vuole digitalizzare. L’uscita del
comparatore, collegata al controllo della modalità di conteggio del contatore,
sarà “bassa” (=0), se la tensione Va è minore di quella in uscita al DAC e
di conseguenza il contatore è nello stato UP (ovvero incrementa il valore del
registro che contiene il numero di impulsi contati), mentre risulterà “alta” (=1)
se la tensione Va è maggiore di quella in uscita al DAC e conseguentemente
il contatore sarà nello stato DOWN (ovvero decrementa il valore del registro
che contiene il numero di impulsi contati). Di conseguenza il numero binario
immagazzinato dal contatore oscillerà di un bit attorno alla sua conversione
digitale. Lo stato delle linee che indicano il contenuto del registro di memoria del
contatore è ispezionabile tramite un dispositivo di DISPLAY, che nello schema
è realizzato tramite diodi LED e resistenze di protezione.
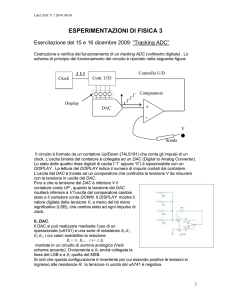
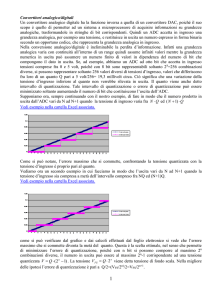
Figura 2 – Nella figura è mostrato l’andamento della risposta di un Tracking
ADC a un segnale analogico (non troppo rapidamente variabile rispetto alla frequenza del clock). Il segnale da convertire è rappresentato dalla linea continua nel
grafico in alto. La risposta dell’ADC è rappresentata dal segnale a scaletta che
prima raggiunge il valore della tensione da convertire e successivamente oscilla ±
un bit attorno al valore analogico.
3
Il circuito del “Tracking ADC” a 4 bit
Un semplice Tracking ADC a quattro bit può essere realizzato con un contatore
Up/Down TTL a quattro bit (74LS191) che conta gli impulsi di un clock esterno.
L’uscita binaria del contatore è collegata ad un DAC (Digital to Analog Converter) realizzato con un operazionale del tipo uA741. Lo stato delle quattro
linee digitali di uscita (1 oppure 0) è ispezionabile con semplice DISPLAY che
utilizza LED e resistenze. Il comparatore di tensione può essere realizzato con
un circuito la cui sigla è LM311.
2
Il contatore “74LS191”. E’ un circuito integrato che contiene un contatore
sincrono a 4 bit con una linea di controllo D/U . Nella figura 3 è riportata
la “piedinatura1 ” dell’integrato con una descrizione sommaria delle principali
connessioni. Per la descrizione completa della funzionalità di questo circuito è
opportuna la consultazione del data sheet disponibile in laboratorio.
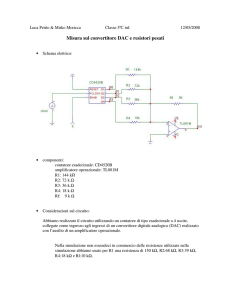
Figura 3 – Schema delle connessioni del “74LS191”. QA (LSB), QB , QC ,
QD (M SB) sono le uscite e D/U è l’ingresso per la modalità di conteggio.
A, . . . , D sono gli ingressi (necessari se si intende utilizzare il preset) che vengono memorizzati tramite l’ingresso LOAD. Il pin 14 (CLK) è l’ingresso degli
impulsi che vengono contati. CT EN è l’ingresso per l’abilitazione al conteggio
(CounT ENable). RCO e M AX/M IN sono due uscite necessarie quando più
74LS191 sono connessi in cascata per ottenere un contatore con un numero di bit
maggiore di 4.
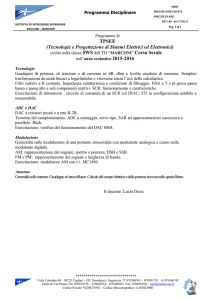
Il “DAC”. Il convertitore digitale-analogico (DAC) può essere realizzato tramite un circuito in grado di sommare in modo pesato diversi ingressi. Nella
figura 4 è mostrata una possibile relizzazione di un DAC ottenuta con un operazionale ed un’opportuna scelta delle resistenze Ri . La tensione di uscita di
questo circuito è:
!
"
δ0
δ1
δ2
δ3
Vu = −Vo RF
+
+
+
(1)
R0
R1
R2
R3
dove i δk rappresentano i bit del codice binario in uscita dal contatore (dal
bit meno significativo k = 0 a quello più significativo k = 3), Vo è il valore
in volt del livello “1”, e le resistenze Ri , (i = 0, . . . , 3) soddisfano la relazione
Ri−1 = 2Ri , (i = 1, 2, 3). Nel progetto si devono dimensionare correttamente le
resistenze Ri e RF in modo tale che la tensione massima (in valore assoluto)
di uscita, pari a 15Vo RF /Ro non superi il valore della tensione di alimentazione dell’operazionale. Si noti che questa configurazione cambia il segno della
tensione di uscita rispetto a quella di ingresso.
1 Piedinatura
è un termine gergale, traduzione del termine inglese pinout, con cui si indicano
l’insieme delle caratteristiche, funzioni e disposizione geometrica delle connessioni (pin) di un
circuito, tipicamente un circuito integrato. Il termine non è riportato nella maggior parte dei
vocabolari italiani.
3
MSB
R n =R 0/2
R3
n
RF
R2
−
+
R1
LSB
R0
Figura 4 – Schema del DAC utilizzato.
Il Comparatore di tensione Il comparatore di tensione a disposizione (LM311)
è del tipo Open Collector (vedi figura 5) e può funzionare anche alimentato in
modo asimmetrico (ovvero tra 0 V e 5 V ), tuttavia nel circuito proposto, con
tensioni negative in ingresso, questo tipo di alimentazione del LM311 è da evitare. Essendo di tipo Open Collector ha bisogno di una resistenza di “Pull-Up” del
valore di qualche kΩ (tipico valore della resistenza di collettore di un it BJT).
V CC
+
Resistenza di "Pull−Up"
−
+
−
Figura 5 – La tecnica dell’open-collector nel comparatore LM311.
Osservazioni pratiche. Le transizioni generate dal LM311, da “0” a “1” e
viceversa, sono molto veloci e possono facilmente generare interferenza all’interno del circuito integrato del contatore (accoppiamento capacitivo) modificando
in modo imprevedibile il contenuto del registro del contatore. È opportuno
quindi collegare l’uscita del comparatore a massa con una capacità dell’ordine
di 100 nF per attenuare le componenti ad alta frequenza dell’impulso e quindi
aumentare adeguatamente i tempi di salita e di discesa del segnale d’uscita del
comparatore .
Ground 1
8 V+
+
Input + 2
7 Out
−
6 Balance/Strobe
Input −3
5 Balance
V−4
Figura 6 – “Piedinatura” del LM311.
4
Il DISPLAY. Per ispezionare lo stato delle linee digitali si può usare il semplice dispositivo mostrato in figura 1, che consiste di un diodo LED con in serie
un’opportuna resistenza che limita la corrente nel diodo. Se la linea è “alta” il
diodo è polarizzato direttamente e quindi conduce. Il passaggio della corrente
in questo tipo di diodi provoca l’emissione di luce ed il diodo appare come una
lampadina accesa. Se la linea da ispezionare è “bassa” il diodo è spento e non
emette luce. Quindi se il diodo relativo ad una generica linea n è emette luce
potremo dire che il bit n-simo è “1” altrimenti sarà a “0”. Dal punto di vista
elettrico la potenza necessaria all’accensione dei diodi viene generata dal circuito del contatore per cui i livelli di tensione trasferiti al DAC, se il valore della
resistenza limitatrice di corrente fosse troppo basso, potrebbero influenzare la
linearità dell’ADC.
4
Caratterizzazione dell’ADC
Quali sono le principali caratteristiche dell’ADC costruito? Come qualsiasi strumento di misura anche questo ADC, una volta realizzato, deve essere caratterizzato, ovvero se ne devono misurare e documentare le caratteristiche fondamentali. A questo scopo è molto utile fare uso del grafico della cosiddetta
Funzione di Trasferimento dell’ADC che consiste nel rappresentare il codice binario, uscita dell’ADC, in funzione della tensione analogica da digitalizzare (vedi
figura 7). Dall’esame della funzione di trasferimento possono essere ricavate alcune caratteristiche di particolare importanza e generalità che descriveremo di
seguito.
Risoluzione. La risoluzione di un ADC è determinata dal numero n di bit
usati per la conversione e dal valore della tensione di fondo scala VF S , e vale
VF S /2n . Questo valore rappresenta la minima variazione della tensione d’uscita
e rappresenta l’ampiezza in volt del bit meno significativo (LSB).
Accuratezza. Un ADC dà come risultato un codice binario con il quale si
valuta il valore analogico in ingresso. L’incertezza da associare a questo valore
dipende da varie cause. Tra queste l’incertezza dovuta alla quantizzazione e
quella dovuta alla, non evitabile, non-linearità sono intrinseche di ogni conversione analogico-digitale. Per l’ADC in oggetto (il Tracking ADC) si ricava√
facilmente che l’incertezza standard dovuta alla quantizzazione è (Vo RF /R0 )/ 12 .
Non-Linearità. In generale gli ADC sono progettati in modo che il codice binario d’uscita rappresenti un numero proporzionale al segnale analogico al loro
ingresso: ADC lineari2 . Nella realtà questa richiesta può essere solo approssimativamente soddisfatta a causa di molte cause come le incertezze su parametri
2 In particolari applicazioni quando, ad esempio, è necessario estendere la dinamica dei
segnali da convertire si utilizzano ADC con scale di conversione non lineari: logaritmiche,
lineari a tratti, . . .
5
Funzione di trasferimento
Figura 7 – Esempio di Funzione di trasferimento di un ADC a 3 bit. Nella figura
sono mostrate la funzione di trasferimento ideale e una possibile reale. La retta
(a punto–linea) tracciata nel grafico congiunge i centri dei gradini della funzione
di trasferimento ideale.
e i comportamenti non ideali dei componenti dell’ ADC. Alcuni di questi effetti,
essendo sistematici, possono essere parzialmente corretti attraverso procedure
di taratura. La valutazione quantitativa della non-linearità di un ADC viene generalmente espressa da due parametri detti Non-Linearità Differenziale (DNL)
e Non-Linearità Integrale (INL).
DNL. La non-linearità differenziale DN L è un parametro definito per ogni
valore del codice D di conversione da analogico a digitale e vale:
DN L =
|VD+1 − VD |
−1
VLSB
(2)
dove VD è il (minimo) valore analogico convertito nel codice D e VLSB è il valore
analogico associato al bit meno significativo (di progetto). A parole potremo
dire che il parametro DN L rapporta l’ampiezza dei “gradini” della funzione di
trasferimento reale con quella di progetto sottraendo 1, in modo tale che se le
due ampiezze sono uguali il parametro DN L è nullo.
INL. Il parametro IN L (non-linearità integrale) per il “gradino” in esame, è
pari alla distanza fra il centro del gradino della funzione di trasferimento reale
e quella ideale. E’ facile dimostrare che la non-linearità integrale per un dato
codice è pari alla somma dei DNL dei codici precedenti.
Come esempio di quanto esposto riportiamo comportamento e analisi di un
ipotetico ADC a 3 bit. La funzione di trasferimento di questo ADC è riportata
in due versioni nella figura 7. Nella figura la scala tratteggiata rappresenta la
6
funzione di trasferimento ideale e quella a tratto continuo una (possibile) funzione di trasferimento reale. La differenza, indicata in figura con ∆, contribuisce
al valore della DN L come definita dalla (2).
5
Osservazioni pratiche
E’ opportuno “bloccare” la tensione di alimentazione di ogni “chip” localmente
(ovvero in prossimità del circuito) con una capacità dell’ordine delle centinaia
di nF . Questo accorgimento vale in generale per ogni tipo di circuito, ma in
particolare è valida per i circuiti digitali. In questi ultimi infatti sono presenti
segnali con fronti di salita rapidi che richiedono alimentazioni in grado di erogare potenza in modo sufficientemente veloce. I fili che portano le alimentazioni e
le connessioni nella “basetta” hanno un induttanza che moltiplicata per la resistenza del circuito alimentato dà il tempo caratteristico necessario al ripristino
della tensione di alimentazione. In questo intervallo temporale, con una tensione
di alimentazione variabile, il circuito può mostrare comportamenti imprevedibili
che possono compromettere il corretto funzionamento del circuito.
Riferimenti Bibliografici
[Millman] – Milman e Grabel Microelectronics McGraw Hill. Si veda il
cap. 16 paragrafo 4.
7