Le forze che agiscono sul blocchetto 1 sono la forza peso m 1g")
1)
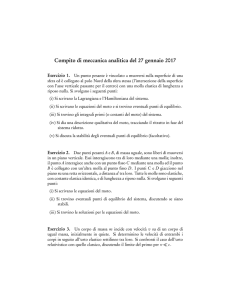
Le forze che agiscono sul blocchetto 1 sono la forza peso m1g , la reazione
vincolare del piano N1, la forza applicata F e la forza - T che il blocchetto 2
esercita su 1 che risulta in base al terzo principio uguale ed opposta alla forza T
che il blocchetto 1 esercita su 2; le forze agenti sul blocchetto 2 , oltre la forza T,
sono la forza peso m2g e la reazione vincolare del piano N2.
N1
N2
F
-T
T
m1 g
m2 g
Le equazioni di moto dei due blocchi sono pertanto:
F + m1g + N1 –T = m1a1
T + m2g + N2 = m2a2
Se i due blocchi si muovono sul piano mantenendosi a contatto le accelerazioni
saranno uguali per cui possiamo porre nelle precedenti equazioni a 1= a 2 = a .
Proiettando le due equazioni vettoriali lungo i due assi orizzontale e verticale si
ottiene il sistema di equazioni:
F – T = m1a
-m1g + N1 = 0
T = m2 a
-m2g + N2 = 0
La seconda e quarta equazione forniscono unicamente il valore della reazione
vincolare di appoggio, mentre le altre due forniscono il valore dell’accelerazione a e
della forza T :
a = F/( m1+ m2)
Numericamente risulta a = 2 m/s2
2)
T = m2F/( m1+ m2)
e T = 2 N.
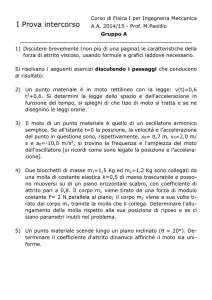
a) Le forze agenti sul mattone sono oltre la forza applicata F, la forza peso mg, la
reazione vincolare N della parete, perpendicolare ad essa , e la forza di attrito f,
parallela alla parete.
y
f
N
x
q
F
mg
La condizione di equilibrio richiede che:
F + mg + N + f = 0
Da cui proiettando lungo l’asse verticale ed orizzontale si ottiene:
Fcosq – N = 0
Fsin q – mg + f = 0
All’equilibrio deve risultare soddisfatta la disuguaglianza
ricavando f ed N dalle precedenti equazioni si ha:
f< mN , quindi
mg - Fsinq< mFcosq
La disequazione fornisce i valori massimo eminimo che può assumere la forza F per
assicurare l’equilibrio:
mg/(sinq + mcosq ) = Fm < F < FM = mg/(sinq – mcosq )
Numericamente risulta Fm = 42.0 N , FM = 86.6 N.
b) Essendo F = Fm /2 il mattone scivolerà lungo la parete verso il basso. L’equazione
di moto è data da:
F + mg + N + f = ma
Da essa proiettando lungo l’asse verticale ed orizzontale si ottiene:
Fcosq – N = 0
Fsin q – mg + f = ma
Essendovi strisciamento verso il basso la forza di attrito è diretta verso l’alto e vale la
relazione f = mN , quindi ricavando N, dalle precedenti equazioni si ha:
a = - g + F(sinq + mcosq )/m = -g/2
Il moto del mattone lungo la parete risulta quindi essere un moto uniformemente
accelerato con accelerazione a = -g/2. Il tempo che il mattone impiega a giungere a
terra è quindi pari a t = (2h/a)0.5 = 2(h/g)0.5 = 0.86 s. La velocità finale risulta
invece pari a v = (2ha)0.5 = (hg)0.5 = 4.2 m/s.
3)
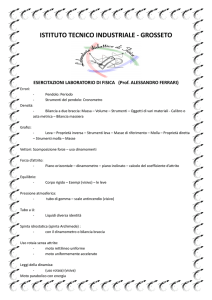
Le forze che agiscono sul blocchetto 2 sono la la forza peso m2g , la forza
vincolare N2 e la forza di attrito f esercitate su di esso dal blocchetto 1. Sul
blocco 1 agiscono, oltre le forze -N 2 e -f esercitate su di esso dal blocco 2 in
virtù del principio di azione e reazione, la forza peso m1g , la reazione vincolare
del piano orizzontale N1 e la forza applicata F.
N1
N2
-f
f
m2 g
F
-N2
m1 g
Le equazioni di moto per i due blocchetti sono pertanto:
F - f + m1g + N1 - N2 = m1a1
(3.1)
f + m2g + N2 = m2a2
(3.2)
Nel caso in cui non c’è scivolamento del blocchetto superiore su quello inferiore
risulterà inoltre che a1= a 2 = a . Proiettando le precedenti equazioni lungo l’asse
orizzontale e verticale si ottiene:
F - f = m1a
-N2 - m1g + N1 = 0
f = m2a
-m2g + N2 = 0
e da queste si ricava immediatamente:
N2 = m2g
N1 = (m1 + m2)g
a = F/( m1 + m2)
f = Fm2/(m1 + m2)
a) Il massimo valore della forza F che può essere applicata, senza che i due blocchi
scorrano l’uno su l’altro, lo si ottiene imponendo la condizione f < mN2 che deve
essere soddisfatta in condizioni statiche. Sostituendo per le due forze le espressioni
trovate si ha infine:
F < FM = mg(m1 + m2)
Numericamente risulta FM = 78.4 N.
b) Per F = FM /2 si ha a = mg/2 ovvero a = 3.92 m/s2.
4) Nel caso in cui si abbia scorrimento del corpo 2 sul blocco 1 le forze agenti sui due
componenti sono le stesse di quelle considerate nell’Es 3 come pure le equazioni di
moto. Varrano pertanto le eq. (3.1-2) con l’unica differenza che adesso risulterà a1≠
a2.. Proiettando le precedenti equazioni lungo l’asse orizzontale e verticale si ottiene:
F - f = m1a1
N2 - m1g + N1 = 0
f = m2a2
-m2g + N2 = 0
Essendovi adesso scorrimento fra i due corpi varrà la relazione f = mN2 = mm2g e
quindi, sostituendo nelle precedenti equazioni, otteniamo:
a1= ( F - mm2g )/m1 = mg(2 + m2/m1)
a2= mg
Il moto dei due corpi è quindi uniformemente accelerato e dalle loro espressioni è
immediato verificare che a1 > a2 dato che , essendovi scorrimento, vale la
disuguaglianza F > mg(m1 + m2). L’equazione oraria delle velocità è pertanto:
v1 = a1t
v2 = a2t
y
x
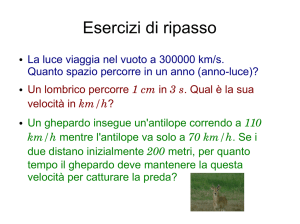
Per le coordinate del punto 2 e del centro del blocchetto, scegliendo l’origine del
sistema di riferimento in corrispondenza della posizione iniziale del punto 2, si ha:
x1 = a1t2/2
x2 = a2t2/2
Il punto 2 cascherà dal blocchetto 1 quando raggiunge il bordo di quest’ultimo,
ovvero quando x1– x2= l/2. L’istante corrispondente risulta pertanto dato dalla
relazione:
t0 = [l/( a1 – a2)]0.5= [lm1/mg( m1 + m2)]0.5
Sempre nello stesso istante la velocità e la coordinata del punto 2 risultano date da:
v20 = a2[l/( a1 – a2)]0.5= [mglm1/( m1 + m2)]0.5
x20 = a2l/2( a1 – a2) = lm1/2( m1 + m2)
Numericamente risulta: t0= 0.107 s , v20= 0.84 m/s , x20= 9 cm.
b) Il moto succesivo del punto 2 sarà quello di un punto materiale soggetto alla sola
forza di gravità e quindi esso descriverà un arco di parabola. Le equazioni orarie del
punto, succesivamente al distacco dal blocco 1, sono date da:
x2 = x20 + v20(t- t0)
y2 = l –g(t- t0)2/2
ed esse forniscono per il punto di impatto col piano orizzontale ( y = 0) l’espressione:
x2 = x20 + v20(2l/g)0.5
Numericamente x2 = 23.7 cm.
4)
Le forze che agiscono sul blocco 1 sono la forza peso m1g , la reazione vincolare
del piano N1, la forza di attrito f1 e la forza T che il blocco 2, tramite la sbarra,
esercita su 1. Essa risulta, in base al terzo principio, uguale ed opposta alla forza
-T che il blocco 1 , sempre tramite la sbarra, esercita su 2; le forze agenti sul
blocchetto 2 , oltre la forza -T, sono la forza peso m2g , la reazione vincolare del
piano N2 e la forza di attrito f2 .
y
N1
f1
T
-T
N2
m1 g
f2
m2 g
q
x
Le equazioni che governano la statica e la dinamica dei due blocchi possono pertanto
essere scritte come:
f1 + m1g + N1 + T = c1= m1a1
f2 - T + m2g + N2 = c2 = m2a2
Dove c1= c2 = 0 nel caso statico , mentre nel caso dinamico risulta c1= m1a1 e c 2 =
m2a2 . A causa della rigidità dell’asta risulterà inoltre che a1= a2 = a.
Consideriamo un angolo q per cui non si ha equilibrio. Proiettando le due equazioni
vettoriali lungo i due assi parallelo e perpendicolare al piano inclinato si ottiene il
sistema di equazioni:
m1gsinq - f1 + T = m1a
-m1gcosq + N1 = 0
m2gsinq - f2 - T = m2a
-m2gcosq + N2 = 0
A queste equazioni, dato che il sistema scivola lungo il piano inclinato, vanno
aggiunte quelle che determinano le forze di attrito in termini di N1 e N2 :
f1= m1N1 = m1m1gcosq
f2 = m2N2 = m2m2gcosq
sostituendo queste espressioni nelle precedenti equazioni si ricava:
a = g[ sinq - cosq( m1m1 + m2m2 )/(m1 + m2)]
T = gcosq( m1 - m2 )[m1m2/(m1 + m2)]
Queste due espressioni consentono di rispondere a tutte le varie domande .
a) L’angolo massimo per cui si può avere equilibrio corrisponde ovviamente
all’angolo minimo per cui il sistema si muove, e quindi dalla condizione a ≥ 0 si
ottiene:
tgqm = ( m1m1 + m2m2 )/(m1 + m2)
Numericamente risulta qm = 0.495 rad = 28,37° (N.B. Le equazioni del caso statico
non consentono di determinare separatamente f1 e f2. Il problema risulta in questo caso
parzialmente indeterminato e il valore di qm può essere ricavato solo come valore
limite per cui si ha scivolamento.).
b) Le equazioni precedenti forniscono le espressioni ed i valori numerici
dell’accelerazione, per cui risulta a = 0.3 m/s2 , e della forza della sbarra T = - 1.0
N. Il segno meno che risulta per T , deriva dal fatto che m1 < m2, e significa
semplicemente che la forza in questione ha verso opposto a quello che abbiamo
arbitrariamente assunto per essa.
c) Le soluzioni precedentemente scritte ci consentono di trovare immediatamente la
soluzione nel caso in cui si inverta la posizione dei due blocchi, effettuando
semplicemente lo scambio degli indici. Si vede pertanto che l’accelerazione a
rimane la stessa mentre la forza T mantiene lo stesso modulo ma cambia di segno.
Quindi mentre nel caso precedente il blocco sottostante (2) è spinto dal blocco
soprastante (1) , in questo caso il blocco sottostante (1) è frenato da quello
soprastante (2).
d) Sostituendo la sbarra con una fune i due blocchi si possono muovere con la stessa
accelerazione solo se la fune è mantenuta in tensione. Quindi si avrà la stessa
accelerazione e lo stesso valore della forza T solo nel caso in cui il blocco 2 si
trova nella posizione superiore. Nell’altro caso la fune non è in grado di esercitare
nessuna azione ed il blocco soprastante (1), avendo un’accelerazione maggiore
del blocco sottostante (2), finisce per precipitare su di esso.
6) Le forze che agiscono sul blocco 1 sono la forza peso m1g , la reazione vincolare
del piano inclinato N, la forza di attrito f e la forza T 1 esercitata su di esso dalla
funicella; sul blocchetto 2 agiscono la forza esercitata dalla funicella T2 e la forza
peso m2g .
y’
y
T1
N
T2
f
m1 g
m2 g
q
x’
Le equazioni che governano la statica e la dinamica dei due blocchi possono pertanto
essere scritte come:
f + m1g + T1 + N = c1= m1a1
(6.1)
m2g + T2 = c2 = m2a2
(6.2)
Dove c1= c2 = 0 nel caso statico , mentre nel caso dinamico risulta c1= m1a1 e c 2 =
m2a2 . Inoltre, essendo la funicella ideale, le forze T1 e T2 risultano uguali in modulo,
ossia T1= T2 = T. Proiettando la prima equazione lungo due assi cartesiani x’, y’ ,
diretti rispettivamente lungo il piano inclinato e perpendicolarmente ad esso ed
orientati come in figura, e la seconda lungo un asse verticale, orientato positivamente
verso l’alto, si ha:
m1gsinq - f - T = c1
N - m1gcosq = 0
T - m2g = c2
a) La condizione di equilibrio può sussistere fintantoché |f| < mN ; ricavando, dalle
equazioni (6.1-2) per il caso statico (c1= c2 = 0 ), f e N si ottiene la disequazione:
| m1sinq - m2 | < mm1cosq
che fornisce i valori cercati:
m1(sinq - mcosq ) = m2m < m2 < m2M = m1(sinq + mcosq )
Numericamente risulta m2m = 0.12 Kg , m2M = 0.38 Kg.
Per quanto riguarda la tensione della funicella è immediato che essa all’equilibrio ha
sempre un valore T = m2g ed è quindi determinate unicamente dal valore di m2.
b) Nel caso in cui m2 = 2m2M il sistema si muove e pertanto, tenuto conto che i corpi
1 e 2 hanno in modulo le stesse accelerazioni (tenuto conto dell’orientazione degli
assi x’ e y risulta quindi a1 = a2 = a) , valgono le eq. (6.1-2) con c1= m1a e c2 =
m2a. In questo caso essendovi strisciamento del blocco 1 sul piano inclinato
risulta f = mN = mm 1gcosq ( nel caso consideratoil blocco 1 si muove verso
l’alto quindi la forza di attrito , di verso opposto a quello della velocità di 1,
risulta avere una componente positiva). Le due equazioni
m1gsinq + mm1gcosq - T = m1a
T - m2 g = m2 a
forniscono immediatamente l’espressione della accelerazione e della tensione della
funicella
a = -g[m2 - m1(sinq + mcosq )]/(m1 + m2) = -g(sinq + mcosq )/[1 + 2(sinq + mcosq)]
T = g(1 + sinq + mcosq)m1m2/(m1 + m2) =
= m1g(sinq + mcosq )(1 + sinq + mcosq)/[1 + 2(sinq + mcosq)]
da cui numericamente a = 2.96 m/s2 e T = 2.6 N.
7)
Sulla massa m agiscono la forza peso mg e la reazione vincolare del piano N,
dirette verticalmente, e la forza elastica della molla F diretta radialmente. Dal
secondo principio si ha:
mg + N + F = ma
Proiettando lungo la direzione verticale e radiale si ottiene quindi:
N –mg = 0
mar = - mw2l = F = - K(l – l0)
dove w = 2pn , n = 10 Hz, ed l è la lunghezza della molla quando il sistema è posto in
rotazione. Dalla seconda equazione si ricava il valore cercato per l:
l = l0/( 1 - mw2/K)
numericamente risulta l = 21.7 cm.
La forza R agente sul perno è diretta radialmente verso l’esterno e pari in
modulo ad F, quindi R = K(l – l0), da cui R = 170 N.
8)
Sulla massa m agiscono la forza peso mg e la tensione T della fune, sulla massa
M agiscono la forza peso Mg e la tensione T’ della fune, in modulo uguale a T.
Dal II principio della dinamica abbiamo pertanto le equazioni:
T’ + Mg = 0
T + mg = ma
O
q
l
T
P
mg
T’
Mg
a) Il punto P descrive un moto circolare uniforme su una circonferenza, in un piano
orizzontale, di raggio r = lsinq , quindi proiettando le equazioni lungo l’asse verticale
e la direzione radiale si ottiene:
T –Mg = 0
Tcosq – mg = 0
-Tsinq = -mw2r = -mw2lsinq
dove si è tenuto conto che T’ = T. Da queste equazioni si ricava immediatamente
M = m/cosq
w = (g/lcosq)0.5
(1)
Numericamente si ha: M = 230 gr e w = 3.88 rad/s.
b) Il lavoro L necessario per passare dalla configurazione iniziale a quella finale
risulta uguale alla variazione di energia meccanica del sistema. Passando alla
nuova configurazione, in cui il tratto di funicella OP ha lunghezza l’, l’angolo q
non cambia essendo costante il rapporto delle masse come risulta dall’Eq. (1). Si
ha pertanto una variazione di energia potenziale, dovuta all’abbassamento della
massa M di un tratto (l – l’) ed al conseguente innalzamento di P di (l – l’)cosq.
La variazione di energia cinetica è dovuta alla variazione del raggio della
circonferenza descritta da P e di w che diviene w’ = (g/l’cosq)0.5 . Pertanto risulta:
L = m(w’2l’2 – w2l2)sin2q/2 - Mg(l – l’) + mg(l – l’)cosq = - 3mg(l – l’)sin2q /2cosq
Numericamente si ha quindi L = -0.21 J.
9)
a) Le forze agenti sulla massa m sono la forza peso mg e la forza esercitata dalla
fune T. All’equilibrio deve risultare:
T + mg = 0
da cui proiettando lungo la verticale si ha immediatamente T = mg, ossia T = 1.96 N.
b) Le forze agenti sulla massa m sono le stesse del punto a) ma, muovendosi con
accelerazione a, avremo:
T + mg = ma
Proiettando lungo un asse verticale avremo: T = m(g + a) , corrispondente a T = 2.56
N, se m accelera verso l’alto, oppure T = m(g –a) , corrispondente a T = 1.36 N se m
accelera verso il basso.
c) Le forze agenti sono sempre la forza peso mg e la tensione della funicella T, ma in
questo caso la funicella OP non risulta in generale diretta verticalmente.
O
q
T
P
mg
Indichiamo con q l’angolo che OP forma con la verticale discendente in una posizione
generica. T dovrà sempre risultare diretto lungo la funicella, e rivolto verso O (in modo
quindi che la forza -T agente sull’estremo P della funicella sia tale da mantenerla in
tensione), mentre mg formerà un angolo q con OP. Dal II principio si ha:
T + mg = ma
da cui proiettando lungo la direzione radiale si ottiene:
-T + mgcosq = mar = - mw2l
e quindi T = mgcosq + mw2l. Nella posizione più bassa della traiettoria, corrispondente a
q = 0 si ha T = m(g + w2l ), ovvero T = 5.56 N, mentre nel punto più alto, corrispondente
a q = p, si ha T = m(-g + w2l ), ovvero T = 1.63 N.
[N.B. - Confrontando le espressioni ed i valori di T nei casi b) e c) con quello trovato
nel caso statico a) si vede che questi sono completamente differenti. Non si devono
pertanto confondere situazioni statiche con situazioni dinamiche. Questo vale in generale
per tutte le reazioni vincolari: le loro espressioni e i loro valori risultano completamente
differenti nel caso statico e nel caso dinamico.]
10) Scegliamo come sistema di riferimento quello solidale con il vagone, che risulta
essere non-inerziale. In questo sistema le forze agenti sulla massa m sono la forza
peso mg e la tensione T della funicella ed inoltre la forza non-inerziale FNI= mA. Supponiamo che il vagone stia accelerando verso sinistra.
y
O
q
A
T
P
FNI
mg
x
a) Si ha all’equilibrio:
T + mg + FNI = 0
Da questa equazione proiettando lungo l’asse orizzontale e verticale, indicando con q
l’angolo che OP forma con la verticale discendente, si ottiene:
-Tsinq + FNI = -Tsinq + mA = 0
Tcosq – mg = 0
Le due equazioni forniscono immediatamente per l’angolo e la tensione le espressioni:
tgq = A/g
T = mg/cosq = ( g2 + A2 )0.5
Numericamente risulta q = 0.47 rad = 27.0° e T = 11.0 N.
b) La forza peso mg e la forza non-inerziale FNI= - mA, essendo A costante , equivalgono
ad un’unica forza, costante, pari alla loro soma vettoriale, ovvero ad una forza di modulo
pari a mg’ = m( g2 + A2 )0.5 la cui direzione forma un angolo q con la verticale. Il pendolo
pertanto oscilla attorno alla posizione di equilibrio, individuata da q, come se fosse
soggetto ad una accelerazione di gravità effettiva g’.
O
q
f
T
P
FNI
mg’
mg
mg’
Detto f l’angolo che OP forma rispetto alla posizione di equilibrio, possiamo quindi
scrivere subito l’equazione di moto per le piccole oscillazioni che risulta del tutto analoga
a quella del pendolo semplice:
mld2f/dt2 = - mg’f
La pulsazione W del moto armonico corrispondente è quindi data da W2 = g’/l ed il
periodo da T = 2p/W = 2p(l/g’)0.5 pari a T = 1.89 s.
Nel caso in cui il vagone si muove con velocità costante ( A = 0 ) il pendolo oscilla
attorno alla posizione verticale, corrispondente alla posizione di equilibrio, ed il periodo
è dato da T0= 2p(l/g)0.5 , pari a T0 = 2.00 s. La variazione percentuale del periodo è quindi
del 5.8 %.
11) Sulla massa m agiscono la forza peso mg, la reazione vincolare N del pavimento
del vagone e la forza elastica della molla Fe. Ponendosi nel sistema di riferimento
solidale col vagone , non-inerziale se il vagone si muove con accelerazione A ,
dobbiamo considerare anche la forza non-inerziale FNI= - mA .
A
N
Fe
FNI
mg
a) Nel caso in cui la massa m sia ferma rispetto al vagone risulterà:
mg + N + Fe + FNI = 0
Proiettando l’equazione lungo l’orizzontale, scegliendo l’origine dell’asse coordinato in
corrispondenza della posizione della massa m quando la molla è a riposo ( in tal modo la
deformazione della molla è pari alla coordinata x della massa, ossia x = l – l0 ), si ha:
Fe – FNI = 0
ovvero
-Kx = mA
Quindi risulta x = -mA/K , ovvero la molla è compressa della quantità |x| = 2 cm.
b) Nel caso in cui la massa si muova rispetto al pavimento del vagone si ha l’equazione di
moto:
mg + N + Fe + FNI = ma
che proiettata lungo l’orizzontale dà:
md2x/dt2 = - Kx – mA
(11-1)
Posto x0 = -mA/K e x = x – x0 = x + mA/K , la precedente equazione diviene:
d2x/dt2 = - Kx/m
ovvero l’equazione di un moto armonico di pulsazione W = (K/m)0.5. La soluzione di
detta equazione ha la forma x = x0cos(Wt + f ) , con x0 e f costanti da determinare in
base alle condizioni iniziali, e rappresenta una oscillazione armonica attorno alla
posizione di equilibrio x0 = -mA/K. All’istante iniziale ( t = 0 ) la massa m si trova nella
posizione di equilibrio ( x = 0), ferma ( v = 0 ), quindi:
x(t =0) = x0cosf = x0 = -mA/K
v(t=0) = dx/dt = -Wx0sinf
da cui f = 0 e x0 = x0 = -mA/K . L'equazione oraria è quindi data da :
x = -(mA/K)cosWt
o
x = (mA/K)( 1 – cosWt )
che corrisponde ad un moto armonico con ampiezza x0= 2.0 cm e frequenza angolare W
= 10 rad/s.
c) Nel caso considerato la forza non-inerziale FNI agisce per un intervallo di tempo
t durante il quale la massa m si suppone non cambi apprezzabilmente posizione. In
questa ipotesi la forza elastica non agisce durante l’intervallo di tempo t , essendo
inizialmente fermo il vagone e quindi non sollecitata la molla. In base a queste
considerazioni si può calcolare immediatamente la velocità v0 acquisita dalla massa m al
termine del tempo t per mezzo del teorema dell’impulso. Si ha infatti:
mv0 = tFNI = -mAt
ossia
v0 = -At
Numericamente risulta v0= - 0.2 m/s ed il segno meno indica che la massa m inizia a
muoversi verso sinistra. Nella fase successiva il vagone si muove con velocità costante
per cui la forza non-inerziale è nulla , pertanto lungo l’orizzontale la massa m è soggetta
alla sola forza elastica ed il moto sara un moto armonico con pulsazione W = (K/m)0.5
attorno alla posizione di elongazione nulla della molla. La corrispondente equazione
oraria è quindi del tipo x = x0cos(Wt + f ) , con x0 e f costanti da determinare in base alle
condizioni iniziali. Considerando l’istante iniziale t = 0 , coincidente con quello finale
dell’intervallo di tempo t , si ha x = 0 e v = v0 = -At ossia:
x(t = 0) = x0cosf = 0
v(t = 0) = -Wx0sinf = v0 = -At
da cui f = -p/2 e x0 = v0 /W = -At/W e infine x = -(At/W)sinWt. Numericamente risulta
x0= - 0.02 m = 2 cm. Pertanto in conseguenza dello strattone la massa m acquisisce una
velocità iniziale v0, senza spostarsi dalla posizione di equilibrio, in conseguenza della
quale essa inizia ad oscillare liberamente attorno ad essa.
[N.B. Il metodo di soluzione dell’eq. (11.1) è del tutto generale. Infatti un’equazione
differenziale, non omogenea, del tipo (11-1):
d2z/dt2 = - Bz + C = - B(z – C/B)
con C costante reale qualsiasi e B costante reale positiva può sempre essere ridotta con
il cambio di variabile x = z – C/B all’equazione differenziale omogenea:
d2x/dt2 = - Bx
Questa è l’equazione differenziale caratteristica di un moto armonico di pulsazione W =
B0.5 , attorno alla posizione x = 0 ; pertanto la precedente è l’equazione differenziale di
un moto armonico, di uguale pulsazione, che avviene attorno ad un centro di oscillazione
traslato della quantità C/B. ]
12) Le forze agenti sulla massa m sono la forza peso mg, conservativa, e la tensione
della funicella T , che non compie lavoro essendo sempre perpendicolare allo
spostamento del suo punto di applicazione. Dal II principio risulta che :
T + mg = ma
Proiettando questa equazione lungo le direzioni radiale e tangenziale si ottengono
rispettivamente le equazioni:
-T + mgcosq = mar = - mw2l
---->
T = mgcosq + mw2l
(12-1)
che fornisce il valore di T in funzione di q e della velocità angolare istantanea w = dq/dt,
e
mld2q/dt2 = - mgsinq
che una volta integrata fornisce il valore di w. Quest’ultimo valore può essere
determinato più rapidamente tramite la conservazione dell’energia.
O
q0
q
T
P
v0
mg
Il una posizione generica in cui OP forma un angolo q con la verticale, scegliendo come
quota di riferimento ( V = 0) per l’energia potenziale delle forze peso il piano orizzontale
passante per O. si ha:
mv2/2 – mglcosq = cost = mv02/2 – mglcosq0
e quindi
w2l2 = v2 = v02 + 2gl(cosq - cosq0)
(12-2)
Sostituendo il valore di w , ricavato dalla precedente equazione, nell’espressione di T
(12-1) si ottiene immediatamente il suo valore in funzione dell’angolo:
T = mv02/l + mg(3cosq - 2cosq0)
(12-3)
a) Dalla equazione (12-2) si ottiene il valore di v nel punto piu basso della traiettoria
ponendo q = 0, ossia v = [v02 + 2gl(1 - cosq0)]0.5 e numericamente v = 2.44 m/s.
b) La massa m raggiungerà la posizione orizzontale se, e solo se, la funicella è tesa
ed esercita la sua azione su m lungo tutta la traiettoria , ovvero se T > 0 o al
minimo T = 0 per q = p/2. Dalla Eq. (12-3) si ha quindi la disuguaglianza:
T = mv02/l - 2mgcosq0 ≥ 0
da cui v0 > vm = (2lgcosq0)0.5 , e numericamente vm = 3.57 m/s.
c) Analoghe considerazioni valgono per il punto più alto della traiettoria ( q = p ). Si
ha in questo caso
T = mv02/l - mg(3 + 2cosq0) ≥ 0
da cui v0 > v’m = [lg(3 + 2cosq0)]0.5 , e numericamente v’m = 5.90 m/s.
d) Poichè l’asta, a differenza della corda, può esercitare sulla massa m una forza
radiale diretta sia verso l’interno che verso l’esterno della circonferenza non è
necessario imporre la condizione T > 0. Perchè la massa raggiunga una qualsiasi
posizione è sufficiente imporre che essa vi giunga con una velocità > 0 ed al
limite uguale a zero. Dall’equazione (12-2) si ha quindi la disuguaglianza
v2 = v02 + 2gl(cosq - cosq0) ≥ 0
da cui per q = p/2 si ha v0 > vm = (2lgcosq0)0.5 , e numericamente vm = 3.57 m/s , mentre
invece per q = p si ha v0 > v*m = [2lg(1 + cosq0)]0.5 , e numericamente v*m = 5.24 m/s.
Si noti che vm ha lo stesso valore del caso b) , ed infatti anche in questo caso T = 0,
mentre risulta v*m < v’m e T = - mg, con T quindi rivolta verso l’esterno della
circonferenza.
[N.B. Le funi , e simili, possono esercitare una forza solo se vengono mantenute in
trazione, mentre invece le aste , e simili, possono svolgere la loro azione sia in
compressione che in trazione. Le aste possono inoltre applicare forze con componenti
perpendicolari all’asta medesima, cosa del tutto impossibile per una fune. ]
13) Le forze agenti sulla massa m sono esclusivamente la forza peso mg e la tensione
T della corda. Valgono in questo caso le stesse considerazioni ed equazioni
dell’es. 12) salvo il fatto che nella prima parte del moto m descrive attorno ad O
una circonferenza di raggio l, mentre dopo che il filo è venuto a contatto con il
chiodo essa descrive, attorno a C, un arco di circonferenza di raggio r = l – b.
O
C
T
mg
Se indichiamo adesso con v la velocità della massa m quando essa passa per la
verticale ( q = q0 = 0 ) si dalla Eq. (12-3)
T = mv2/r + mg(3cosq - 2)
(13-1)
dove v è dato dalla equazione (12-1) relativa alla prima parte del moto in cui m
ruora attorno ad O . Tenendo conto che la massa parte da un angolo q0 = p/2 con
velocità nulla ( v0= 0) si ha v2 = 2gl . Sostituendo nell’eq. (13-1) si ha infine:
T = 2mgl/(l –b) + mg(3cosq - 2)
Imponendo la condizione che nel punto più alto della traiettoria (q = p ) risulti T > 0
si ha la disuguaglianza:
T = 2mgl/(l –b) - 5mg ≥ 0
Da cui b ≥ 3l/5 , ovvero b ≥ 36 cm.
14) a) Le forze agenti sulla massa m sono la forza peso mg e la reazione vincolare di
appoggio dei piani inclinati N; entrambe sono forze conservative.
N
f
h
mg
q
i) per entrambi i piani inclinati la conservazione dell’energia determina la velocità v
della massa alla fine dei piani in funzione della variazione di quota h, e si ha
immediatamente:
mv 2
= mgh fi v = 2gh
2
v = 4.43 m s
Come si vede la velocità al termine dei piani inclinati è indipendente dall’inclinazione dei
medesimi ed è la stessa in entrambi i casi.
ii)
per entrambi i piani inclinati la conservazione dell’energia ci dice che la
quota massima H a cui risale la massa m è data da H = h = 1 m.
iii)
per determinare il tempo richiesto bisogna conoscere l’equazione oraria del
moto; nel caso in oggetto il moto è uniformemente accelerato con
accelerazione a= gsenq diretta lungo il piano inclinato. Quindi detta x la
coordinata della massa misurata lungo il piano inclinato a partire dalla
posizione più alta, essendo la velocità iniziale nulla, si ha:
at 2
x=
2
La lunghezza totale l di un piano inclinato di altezza h è pari a h/senq;
ponendo x= l si ottiene :
2l
1
2h
t=
=
a sin q g
da cui per q = q1 t = 0.90 s e per q = q2 t= 0.64 s.
b) In questo caso, oltre le forze considerate al punto a), agisce sulla massa m anche
la forza di attrito fa = mN = mmgcosq, diretta lungo il piano inclinato.
i) Dal teorema dell’energia cinetica si ha:
mv 2
mmgh
m
- mgh = - mmg cos ql = fi v = 2gh(1 )
2
tgq
tgq
Per q = q1 v = 4.03 m/s , per q = q2
v = 4.20 m/s.
ii) per il moto lungo la guida circolare, priva di attrito, vale sempre la
conservazione dell’energia per cui potremo scrivere, in funzione della velocità
della masssa m in fondo ai piani:
mv 2
v2
= mgH fi H =
2
2g
Con i valori trovati per v al punto prcedente si ha: per q = q1 H = 0.83 m , per
q = q2
H = 0.90 m.
iii) in questo caso, lungo il piano inclinato, si ha ancora un moto uniformemente
accelerato con accelerazione a’= g(sinq – mcosq).Si ha allora:
2l
1
2h
t=
=
a' sin q g(1- m )
tgq
da cui per q = q1 t = 0.99 s e per q = q2 t= 0.67 s.
15) Le forze agenti sulla massa m sono la forza peso mg e la reazione vincolare di
appoggio del piano inclinato N. Nel caso che vi sia attito sarà presente anche una
forza di attrito f , diretta lungo il piano medesimo.
N
f
mg
q
a) nel caso in cui il piano inclinato è liscio vale la conservazione dell’energia, quindi
posto il livello di riferimento dell’energia potenziale alla quota da cui viene lanciata
la massa m, si ha per la quota massima h.
mv02
v20
mgh =
fi h =
h = 1.27 m
2
2g
b) in questo caso si ha una forza di attrito f = mN = mmgcosq, diretta lungo il piano
inclinato, che compie lavoro resistente (< 0); essendo lo spostamento del suo punto di
applicazione, lungo il piano inclinato, pari a h/sinq , dove h è la variazione di quota, si
ha:
mv2
mmgh cos q
v02
mgh - 0 = fi h =
m
2
sin q
2g(1 +
)
tgJ
Quando la massa m ha raggiunto la quota massima si fermerà in questo punto se può
sussistere la condizione di equilibrio f < famax = mmgcosq. Una volta che la massa m sia
ferma e rimanga in equilibrio la forza di attrito risulta uguale ed opposta alla componente
della forza peso lungo il piano inclinato, quindi si ha:
f a = mgsin q fi mgsin J £ mmg cos q fi m ≥ tgq = mm
e nel caso in oggetto risulta mm= 0.577.
b) nel caso in cui la massa si fermi nel punto più alto risulta, con m/tgq = 2 ,
h = 0.425.
c) nel caso in cui m/tgq = 1/2 si ha per la variazione dell’energia cinetica fra
l’istante iniziale e quello in cui m torna al punto di partenza:
mv 2 mv02
2mmgh
=2
2
tgq
da cui si ottiene v= 2.88 m/s.
fi v = v0
tgJ - m
tg q + m
16) Le forze agenti sulla massa m sono la forza peso mg. la reazione vincolare di
appoggio del piano inclinato N e la forza elastica della molla Fe. Tutte queste
forze sono conservative.
Fe
N
mg
q
a) all’equilibrio la forza elastica della molla deve risultare uguale ed opposta alla
componente della forza peso lungo il piano inclinato, quindi detta xe l’elongazione
della molla all’equilibrio si ha:
mg sinJ
mg sin J - Kxe = 0 fi xe =
x e = 5.9 cm
K
Il moto della massa m può essere determinato mediante il principio di conservazione
dell’energia. Scegliamo come livello di riferimento per l’energia potenziale delle forze
peso il piano orizzontale passante per la posizione occupata dalla massa m con la molla a
riposo. Indichiamo con x la coordinata di m lungo il piano inclinato riferita a questa
posizione. Si ha dalla conservazione dell’energia:
mv 2 Kx 2
+
- mgx sin q = 0
2
2
(16-1)
Il moto corrispondente è una oscillazione armonica attorno alla posizione di equilibrio di
periodo T = 2p(m/K)0.5 ed ampiezza pari a xe.
b) nel punto di elongazione massima della molla xM si ha v=0 e quindi dalla eq. (16-1):
xM =
2mgsin J
= 2x e
K
x M = 11.8 cm
c) la massima energia cinetica la si ha quando è minima l’energia potenziale ovvero per
x=xe, quindi sempre dall’eq. (16-1):
m
v = gsin J
v = 0.54 m s
K
d) la minima accelerazione , in modulo, la si ha per x=xe e risulta a = 0 . La massima
accelerazione, in modulo, la si ha negli estremi di oscillazione ossia per x = 0 oppure x =
xM, quindi:
a = gsinJ - Kx /m fi aM = gsin J
aM = 4.9 m 2
s
e) la forza F applicata al supporto è uguale in modulo alla forza elastica della molla,
pertanto questa avrà il valore masssimo per x=xM da cui:
†
F = Kx M = 2mg sin J
F = 1.18 N
f) l’intervallo di tempo t corrispondente a due passaggi consecutivi di m per la
posizione di equilibrio corrisponde ad un semi-periodo, quindi abbiamo:
t=
T
m
=p
2
K
t = 0.34 s
17) Le forze agenti sulla massa m sono la forza peso mg. la reazione vincolare di
appoggio del piano inclinato N, la forza elastica della molla Fe , tutte forze
conservative, e la forza di attrito fra piano inclinato e la massa m , non
consevativa.
Fe
N
f
mg
q
Considerando il lavoro resistente della forza di attrito, in un riferimento uguale a
quello dell’es. 16), si ha dal teorema dell’energia cinetica che la variazione di energia
meccanica fra due istanti è data da:
D(
mv 2 Kx 2
+
- mgx sin J ) = -mmgcos JDl
2
2
dove Dl è lo spostamento complessivo del punto di applicazione della forza di attrito .
a) Detta x1 la deformazione della molla nel punto di arresto immediatamente successivo
† del sistema, essendo v = 0 nella configurazione iniziale e finale e Dl = x al rilascio
0
x1 , si ha:
Kx 2
Kx 2
( 1 - mgx1 sin J ) - ( 0 - mgx 0 sin J ) = -mmgcosJ (x 0 - x1 )
2
2
2mg
fi
x1 =
(sin J + m cosq ) - x 0
x1 = 1.8 cm
K
b) La forza F agente sulla massa m in x1, essendo in quella posizione la forza di attrito
nulla ( si può fare questa affermazione, senza scrivere le equazioni fornite dal II
†
principio, in virtù del fatto che la forza di attrito cambia verso fra un’istante prima
dell’arresto di m ed un’istante dopo; di conseguenza nell’istante di arresto essa deve
essere nulla), è data da:
F = mg sinJ - Kx1
F = 0.41 N
18) Le forze agenti su P sono la forza peso mg e la reazione vincolare della guida N,
che in assenza di attriti è perpendicolare alla guida stessa. Le forze in oggetto
sono entrambe conservative.
N
P
mg
q
O
Dal II principio si ha:
N + mg = ma
da cui proiettando lungo la direzione radiale e tangenziale si ha:
N – mgcosq = mar = - mw2R ‡
N = mgcosq - mw2R
mgsinq = mat = mRa
(18-1)
dove w = dq/dt è la velocità angolare ed a = dw/dt è l’accelerazione angolare. La prima
equazione fornisce il valore della reazione vincolare, mentre la seconda equazione
costituisce l’equazione di moto e, una volta integrata fornisce, il valore della velocità.
Quest’ultima, essendo il sistema soggetto a forze conservative, è però determinata in
modo più rapido tramite la conservazione dell’energia. Scegliendo come livello di
riferimento per l’energia potenziale delle forze peso ( V = 0 ) il piano orizzontale
passante per O, si ha:
mv2/2 + mgRcosq = mgR
Æ
v2 = 2gR( 1 - cosq )
Sostituendo quest’ultima espressione (v = wR) nell’equazione (18-1) si ottiene:
N = mg( 3cosq – 2 )
a) Per i due angoli considerati si ha: q1 = 30° , N1 = 0.41 N ; q2 = 60° , N2 = - 0.34 N. Dai
valori trovati e dall’espressione di N si vede che la rezione vincolare può assumere sia
valori positivi che negativi. Se N > 0 , quindi N è rivolta verso l’esterno, la guida
“sostiene” P, se N < 0 , quindi N è rivolta verso il centro O, la guida “trattiene” P. Il
cambiamento di segno si ha in corrispondenza dell’angolo q* tale che:
cosq* = 2/3
q* = 0.84 rad = 48.19°
b) Nel caso in cui P sia semplicemente appoggiato al supporto il vincolo può solo
svolgere una azione di sostegno della massa, in altri termini deve risultare N > 0;
dall’istante in cui N si annulla, ossia in corrispondenza dell’angolo qd = q*, il
vincolo cessa di esercitare la sua azione e la massa si distacca dal supporto.
c) Nel caso in cui il supporto non sia liscio si deve considerare anche l’azione su P
della forza di attrito f, tangente al supporto, che è ovviamente dissipativa.
L’equazione di moto diviene quindi:
N + mg + f = ma
La proiezione di questa equazione nella direzione radiale fornisce per N la stessa
equazione ed espressione (18-1); il valore di N per un angolo q sarà tuttavia diverso dato
che diversò sarà il valore della velocità di P in corrispondenza dello stesso angolo. La
velocità può essere ricavata, almeno qualitativamente, dal teorema dell’energia cinetica, e
si ha:
(mv2/2 + mgRcosq) - mgR = La = -| La |
dove con La si è indicato il lavoro della forza di attrito , che risulta necessariamente < 0.
Da questa espressione si ha quindi:
v2 = 2gR(1 - cosq) - 2| La |/m
ed infine:
N = mg(3cosq -2 ) + 2| La |/R
Si vede quindi che N si annulla per un angolo q’ dato dalla relazione:
cosq’ = 2/3 - 2| La |/3mgR
e pertanto risulta q’ > q*.
19) Le forze a cui è soggetta la massa m sono la forza peso mg e la reazione vincolare di
appoggio N del piano orizzontale, che agiscono durante tutto il moto, e , limitatamente al
periodo di interazione con la molla, la forza elastica Fe di quest’ultima. Tutte le forze in
gioco sono conservative e quindi l’energia si conserverà durante tutte le fasi del moto; a
questo riguardo inoltre, dato che N ed mg compiono lavoro nullo, potremo limitarci a
considerare esclusivamente l’energia potenziale delle forze elastiche.
N
Fe
mg
a) La molla raggiunge la massima compressione xM quando la massa m si ferma;
nell’istante corrispondente l’energia cinetica della massa è nulla e quella che essa
ha inizialmente, prima del contatto con la molla, si è trasformata integralmente in
energia potenziale delle forze elastiche. Dalla conservazione dell’energia si ha
quindi:
mv02/2 = KxM2/2
Æ
xM = v0(m/K)0.5
e numericamente xM = 7.8 cm.
b) Al termine dell’interazione con la molla la massa m possiede solo energia cinetica
e questa deve risultare uguale a quella iniziale. Quindi risulta:
v2 = v02
v = ±v0
Æ
Delle due radici la sola accettabile è quella col segno negativo quindi v = - v0 .
Pertanto la massa m alla fine dell’interazione ha mantenuto la stessa velocià iniziale,
in modulo, ma ha invertito il verso di movimento.
c) Per determinare la forza elastica della molla si deve necessariamente far ricorso al
II principio. Limitatamente alla componente orizzontale dell’equazione di moto si
ha, per tutta la durata dell’interazione con la molla:
ma = m(d2x/dt2) = Fe = -Kx
(19-1)
avendo indicato con x la deformazione della molla. Durante questa fase il moto
corrisponde ad una semi-oscillazione di un moto armonico di pulsazione W = (K/m)0.5
la cui equazione oraria, soluzione dell’equazione (19-1), è:
x = Xcos(Wt + f )
con X e f costanti da determinare in base alle condizioni iniziali. Facendo coincidere
l’istante iniziale t = 0 con l’istante in cui m entra in contatto con la molla si ha:
x(t = 0) = Xcosf = 0
v(t = 0) = -WXsinf = - v0
da cui f = -p/2 , X = - v0/W = - xM. Per la forza elastica si ha quindi:
Fe = -Kx = (Kv0/W)sinWt = (Km)0.5v0sin Wt
Con un valore massimo della forza elastica pari a FeM = KxM = (Km)0.5v0 = 78 N.
d) La durata t dell’interazione con la molla corrisponde al tempo che impiega il
sistema a compiere una semi-oscillazione, ovvero:
t = T/2 = p/W = p(m/K)0.5
Numericamente risulta t = 35 ms.
e) Applicando la definizione di impulso di una forza si ha:
J=
†
Ú
t
F dt =
0 e
Ú
Kv 0
sinWt dt = 2mv 0
0 W
t
e quindi J = 1.75 Ns. Il risultato poteva anche essere ricavato immediatamente dal
“teorema dell’impulso” ed infatti l’ultimo termine corrisponde esattamente alla
variazione della quantità di moto della massa m fra l’istante iniziale e finale
dell’interazione.
f) Per il valore della costante elastica della molla K’ = 100 K si hanno i valori: x’M =
xM /10 = 0.78 cm , F’eM = 10 Fe = -Kx = (Kv0/W)sinWt = (Km)0.5v0M = 780 N , t’ =
t/10 = 3.5 ms mentre invece non cambiano i valori di v e dell’impulso J.
Dalle precedenti espressioni si vede che per K Æ • la forza elastica della molla
aumenta , e precisamente Fe Æ• come ÷K , mentre la durata dell’interazione
decresce, e precisamente t Æ 0 come 1/÷K, ma in modo tale che il prodotto Fet , o
più precisamente l’impulso J, rimane comunque costante. Come già rilevato la
variazione di quantità di moto della massa m è quindi sempre la stessa e indipendente
dal valore della costante elastica della molla.
[ Commento - Il sistema studiato nell’esercizio costituisce un modello,
indubbiamente semplice e schematico, di ciò che avviene nell’urto di un corpo contro
una parete. A seguito del contatto del corpo con la parete si produce una
deformazione del corpo medesimo e/o della parete che dà luogo a forze di tipo
elastico, che si oppongono alla deformazione; nel modello queste sono simulate dalla
forza esercitata dalla molla. Tanto più gli oggetti sono rigidi tanto più è grande la
corrispondente costante elastica della molla e, di conseguenza, è grande l’intensità
della forza di interazione e breve la durata dell’interazione medesima. Nel limite
ideale la forza diviene infinitamente grande ( forza impulsiva) e la durata dell’urto
infinitesima, ma l’impulso associato rimane sempre finito. Il caso considerato
nell’esercizio corrisponde inoltre a quello di deformazioni perfettamente reversibili,
al termine delle quali tutti gli oggetti hanno riacquistato la loro forma, e in cui non
intervengono forze dissipative. In questo tipo di urti l’energia si conserva in tutte le
varie fasi e si ha conseguentemente la conservazione dell’energia cinetica del corpo
fra l’istante che precede immediatamente l’inizio dell’urto e quello immediatamente
successivo alla sua fine; l’urto è in questo caso detto “completamente elastico” o
anche più semplicemente “elastico”.]
20) Oltre le forze già considerate nell’esercizio 19) agisce in questo caso la forza di
attrtito fra il blocco ed il piano orizzontale. Essendovi strisciamento essa è
determinata in termini del coefficiente di attrito e della reazione vincolare di
appoggio ( f = mN = mmg ) ed è opposta alla velocità della massa m.
N
Fe
f
mg
a) Essendo presente una forza dissipativa, per determinare la massima compressione
della molla xM (equivalente al modulo della deformazione della molla e dello
spostamento del punto di applicazione della forza di attrito) dobbiamo applicare il
“teorema dell’energia cinetica”:
KxM2/2 - mv02/2 = - mmgxM
(20-1)
Risolvendo l’equazione di secondo grado che si ricava dall’eq. (20-1) si ha:
xM = - (mmg/K) + [ (mmg/K)2 + mv02/K ]0.5
(20-2)
e numericamente xM = 8.7 cm.
b) Nell’ipotesi che il blocchetto rimanga fermo nella posizione di massima
compressione della molla si ha una situazione di equilibrio nella quale la forza di
attrito risulta uguale ed opposta alla forza elastica della molla , ossia f = KxM .
Essendo in condizioni statiche deve essere soddisfatta la condizione f = KxM <
mN = mmg . Sostituendo a xM l’espressione data dall’eq. (20-2) si trova:
v0 < v0M = mg(3m/K)0.5
e numericamente v0M = 3.3 m/s.
c) L’energia dissipata corrisponde, come si vede dall’eq. (20-1), al modulo del
lavoro della forza di attrito , ossia DE = mmgxM , DE = 58.7 mJ.
d) Per determinare la forza agente sulla massa m , in funzione del tempo, è
necessario scrivere l’equazione di moto:
N + mg + Fe + f = ma
Proiettando questa equazione lungo l’orizzontale si ottiene:
ma = m(d2x/dt2) = Fe + f = -Kx + mmg = - K( x – mmg/K)
(20-3)
L’equazione precedente è quella di un moto armonico di pulsazione W = (K/m)0.5 ( W
= 2.83 rad/s ; T = 2p/W = 2.22 s) attorno al centro di oscillazione x0 = mmg/K . L’
equazione oraria della deformazione x della molla , soluzione dell’eq. (20.3), ha la
forma:
x – mmg/K = Xcos(Wt + f )
con X e f costanti da determinare in base alle condizioni iniziali. Facendo coincidere
l’istante iniziale t = 0 con l’istante in cui m entra in contatto con la molla si ha:
x(t = 0) = Xcosf + mmg/K = 0
v(t = 0) = -WXsinf = - v0
da cui tgf = -Kv0 /Wmmg = -Wv0 /mg , X = ±[ (mmg/K)2 + mv02/K ]0.5 = ±[xM +
(mmg/K)]. Scegliendo per la fase la soluzione f = - 0.48 rad = - 27.7° si deve
scegliere per l’ampiezza X la soluzione col segno – per cui si ha X = -7.6 cm. Si ha
infine per la forza totale F agente su m:
F = ma = -mW2Xcos( Wt - |f| ) = [ (mmg)2 + mv02K ]0.5 cos( Wt - |f| )
e) Il tempo t necessario a raggiungere la massima compressione della molla lo si
ottiene ponendo nella equazione oraria x = - xM , e risulta immediatamente t = |f|
/W = T(|f| /2p) ossia t = 0.17 s.
f) L’impulso totale J fornito alla massa m è calcolato immediatamente dal teorema
dell’impulso. Tenuto conto che la quantità di moto iniziale è uguale in modulo a
mv0 , e rivolta verso la parete, e quella finale nulla, si ha che l’impulso vale J =
mv0 ed ha verso opposto a quello della velocità iniziale di m. L’impulso totale J è
la soma vettoriale dell’impulso dovuto alla forza elastica Je e dell’impulso dovuto
alla forza di attrito Ja, che risultano entrambi diretti lungo l’orizzontale ed
equiversi. L’impulso prodotto dalla forza elastica può essere calcolato
direttamente, secondo lo schema visto nell’esercizio precedente, ma , essendo la
forza di attrito costant, può essere calcolato più rapidamente come differenza.
Infatti si ha:
Je = J – Ja = mv0 - mmgt
Numericamente risulta J = 0.125 Ns e Je = 0.01 Ns.
g) Nel caso in cui la molla divenga via via più rigida ( K Æ• ) e
contemporaneamente cresca anche il coefficente di attrito m , in modo tale però
che il rapporto m/(K)0.5 rimanga costante, si ha il seguente comportamento delle
grandezze fisiche precedentemente calcolate: xM µ1/(K)0.5 Æ 0, v0M rimane
costante come pure l’energia dissipata, la forza esercitata dalla molla Fe µ(K)0.5
Æ• mentre t µ1/(K)0.5 Æ 0 di modo che l’impuso totale mantiene il valore
costante mv0.
[Commento – Questo sistema fornisce un modello schematico di urto completamente
anelastico fra una massa ed una parete nel quale però vengono considerate solo
forze elastiche che obbediscono alla legge di Hooke; in un caso reale intervengono
necessariamente deformazioni che vanno ben oltre il limite di validità della suddetta
legge e si traducono poi in una deformazione permanente dei corpi. In un urto
completamente anelastico un corpo finisce per aderire materialmente all’altro e nel
processo, nel quale non si ha conservazione dell’energia, l’energia cinerica iniziale
va in parte dissipata per attrito, producendo calore, in parte rimane nel sistema sotto
forma di energia di deformazione dei corpi. Come nel caso precedente, più i corpi
sono rigidi più è grande la forza di interazione e corrispondentemente è breve la
durata dell’interazione. Nel limite di costanti elastiche tendenti all’infinito si hanno
forze molto grandi ,“impulsive”, e al limite tendenti all’infinito, ma durate
infinitesime di modo che la variazione di quantità di moto risulti sempre finita.]
21) Sui due blocchi agiscono, in ogni fase del moto, le forze peso m1g e m2g e le
reazioni vincolari di appoggio N1 e N2. Inoltre, limitatamente alla durata
dell’interazione dei due blocchi tramite la molla, agisce su ciascuno di essi la
forza elastica della molla Fe; queste due forze, a differenza delle altre, sono però
forze interne al sistema costituito dai due blocchi.
N1
N2
-Fe
Fe
m1 g
m2 g
Durante tutte le fasi del moto, essendo le forze conservative, vale la conservazione
dell’energia ed inoltre, essendo la componente orizzontale della risultante delle forze
esterne nulla, vale la conservazione della quantità di moto lungo l’asse orizzontale.
a) In base a quanto detto la velocità V del centro di massa del sistema rimane
costante e risulta:
V = (m1v1 + m2v2)/( m1 + m2) = (m1v10 + m2v20)/( m1 + m2) = V0
b) In base al Teorema di König , l’energia cinetica T può essere scritta come la
somma dell’energia cinetica del centro di massa TCM più l’energia cinetica
relativa al centro di massa T’. Essendo la velocità del centro di massa costante ne
segue che anche l’energia cinetica del centro di massa rimane costante, ossia:
TCM = ( m1 + m2)V2/2 = ( m1 + m2)V02/2 = TCM0
(21-1)
Dato che anche l’energia cinetica totale ha lo stesso valore prima e dopo l’interazione
con la molla si può allora scrivere:
T’ = T - TCM = T0 - TCM0 = T’0
con
T’0 = m1v210/2 + m2v220/2 - (m1v10 + m2v20)2/2( m1 + m2) =
[m1m2/(m1 + m2)](v10 - v20)2/2 = m(v10 - v20)2/2
(21-2)
e analogamente
T’ = m(v1 - v2)2/2
avendo posto m = m1m2/(m1 + m2) ; la quantità m viene detta “massa ridotta”. Nel
momento di massima compressione della molla la velocità relativa dei due corpi si
annulla, ovvero v1= v2 , e quindi T’ = 0.
c) Dalla conservazione dell’energia per la massima compressione della molla xM si
ha:
T0 = TCM0 + T’0 = TCM0 + Kx2M/2
Da cui, utilizzando l’eq. (21-2) , xM= [m(v10 - v20)2/K]0.5.
d) Dalla conservazione della quantità di moto e dell’energia si ha:
m1v1 + m2v2= m1v10 + m2v20
m1v 1/2 + m2v22/2 = m1v210/2 + m2v220/2
2
da cui portando i temini con l’indice 1 a primo membro e quelli con l’indice 2 a secondo
membro si ottiene:
m1(v1 - v10) = m2(v20 - v2 )
m1(v21 - v210)/2 = m2(v220 - v22)/2
e semplificando
m1(v1 - v10) = m2(v20 - v2 )
v1 + v10 = v20 + v2
da cui infine:
v1 = [2m2v20+ ( m1 - m2)v10]/( m1 + m2)
v2 = [2m1v10+ ( m2 – m1)v20]/( m1 + m2)
e) La velocità con cui si muovono i due blocchi, uniti insieme, è ottenuta
immediatamente dalla conservazione della quantità di moto e coincide con la velocità del
centro di massa del sistema quindi:
v1 = v2 = (m1v10 + m2v20)/( m1 + m2) = V0
L’energia cinetica dissipata, dato che la velocità e quindi l’energia cinetica del centro di
massa rimangono comunque costanti, corrisponde all’energia cinetica relativa al centro di
massa che il sistema ha prima dell’inizio dell’interazione ovvero:
DT = T’0 = m(v10 - v20)2/2 = Kx2M/2
dove l’ultima relazione ci dice che l’energia cinetica dissipata si è trasformata in energia
potenziale delle forze elastiche.
f) E’ sufficiente porre nei risultati precedenti v20 = 0 per avere i risultati cercati.
g) Ponendo entrambe le masse uguali ad m si ha per la velocità del centro di massa V =
(v1 + v2)/2 e per l’energia cinetica relativa al centro di massa T’ = m(v1 - v2)2/4; per le
velocità dopo l’interazione si ha:
v1 = v20
v2 = v10
quindi le velocità dei due corpi dopo l’interazione risultano scambiate fra di loro. In
particolare se v20= 0 , il corpo 1 si ferma mentre il corpo 2 parte con la velocità che
aveva il corpo 1 prima dell’interazione.
h) Nel limite in cui la massa del corpo 2 è molto maggiore di quella del corpo 1 si ha
la massa ridotta m = m1, quindi per quanto riguarda la massima compressione
della molla questa vale xM= [m1(v10 - v20)2/K]0.5. Per le velocità si ha invece v1 =
2v20 - v10 e v2 ≈ v20. Poichè la prima di queste relazioni può anche scriversi come v1
- v20 = v20 - v10 possiamo dire che al termine dell’interazione la velocità relativa del
corpo 1, rispetto al corpo 2, ha mantenuto lo stesso valore iniziale ma ha cambiato
verso. In questo caso quindi pur di considerare la velocità relativa della massa 1,
piccola, rispetto alla massa 2 si può ragionare come nel caso di una massa m che
interagisce con una molla fissata ad una parete (Es. 19).
[Osservazione – Il caso considerato in questo esercizio si adatta bene a descrivere, nel
caso unidimensionale, ciò che succede nell’urto di due corpi. La forza esercitata dalla
molla costituisce un modello delle forze elastiche che si sviluppano a seguito delle
deformazioni che si producono nel contatto dei due corpi. Le caratteristiche della
molla, ossia la grandezza della costante elastica K, non intervengono a determinare le
velocità dei corpi al termine dell’urto; semplicemente, in modo del tutto analogo a
quanto visto negli esercizi (19-20), più grande è la costante K più grande è la forza
elastica di interazione e più corto il tempo di interazione. Nel caso ideale di urto fra i
due corpi le forze sono “ forze impulsive” (tendenti a infinito) e la durata dell’urto
infinitesima, ma le variazioni di quantità di moto prodotte su ciascuno dei corpi
rimangono comunque finite. Come risulta dall’esempio se le forze impulsive in
gioco sono solo forze interne si in ogni caso la conservazione della quantità di moto
del sistema. A seconda che si abbia o meno conservazione dell’energia cinetica l’urto
è classificato come “completamente elastico”( caso d) , o semplicemente “ elastico”,
oppure come anelastico. Nel caso di urto “completamente anelastico”(caso e) i due
corpi si muovono come una sola entità, al termine dell’urto, e non si ha ovviamente
conservazione dell’energia cinetica. L’energia cinetica dissipatà sarà stata tramutata
in energia potenziale di deformazione ed eventualmente in calore.]
22) Sui due blocchi agiscono le forze peso m1g e m2g e le reazioni vincolari di
appoggio N1 e N2. Inoltre agisce su ciascuno di essi la forza elastica della molla
Fe; queste due forze sono però interne al sistema costituito dai due blocchi.
y
N1
N2
- Fe
Fe
x
O
m1 g
m2 g
a) Essendo la risultante delle forze esterne lungo l’asse orizzontale nulla si conserva la
quantità di moto del sistema; essendo questa inizialmente nulla tale resterà durante tutto
il moto e quindi:
m1v1 + m2v2 = (m1 + m2)VCM = 0
Essendo la velocità del centro di massa ( CM) del sistema VCM nulla ne consegue che
esso non si sposta durante tutto il moto successivo: le due masse si muoveranno ma
sempre in modo tale che la posizione del CM rimanga inalterata. Quindi scegliendo
l’origine O del sistema di riferimento nel punto in cui si trova inizialmente il CM avremo
m1x1 + m2x2 = (m1 + m2)XCM = 0
x1 = - m2x2/m1
dove con x1 e x2 si sono indicate le coordinate dei punti di collegamento della molla con i
blocchetti 1 e 2 rispettivamente. Il sistema ha due gradi di libertà quindi sono necessarie
due equazioni per determinare il moto del sistema; oltre che alle equazioni
precedentemente scritte, si può ricorrere alla conservazione dell’energia oppure al II
principio della dinamica. In quest’ultimo caso, indicando con b la lunghezza a riposo
della molla, si ha per le due masse:
m1a1 = - Fe = K(x2 - x1 - b)
m2a2 = Fe = - K(x2 - x1 - b)
Ricavando le accelerazioni e sottraendo la prima equazione dalla seconda si ottiene:
a2 – a1 = d2(x2 - x1 - b)/dt2 = - [(m1 + m2)/m1m2]K(x2 - x1 - b) = - K(x2 - x1 - b)/m
dove m = [m1m2/(m1 + m2)] è la “massa ridotta del sistema”. Tenuto conto che la quantità
x = (x2 - x1 - b) rappresenta la deformazione della molla, si vede subito che il sistema
oscilla attorno alla posizione di equilibrio descrivendo un moto armonico di pulsazione
W = [K/m]0.5, e periodo T = 2p[m/K]0.5.Tenendo conto delle condizioni iniziali (
deformazione pari a - x0 e velocità dei due corpi nulla ) si ha per la deformazione della
molla l’equazione oraria:
x = - x0 cosWt
Pertanto l’ampiezza di oscillazione totale del sistema è pari a x0 e ciascun blocchetto
oscilla attorno alla propria posizione di equilibrio descrivendo un moto armonico di
ampiezza rispettivamente:
x1 = x0m2/(m1 + m2)
x2 = x0m1/(m1 + m2)
Poichè la coordinata della posizione di equilibrio x10 e x20 dei due corpi è data dale
relazioni:
x10 = -bm2/(m1 + m2)
x20 = bm1/(m1 + m2)
l’equazione oraria di ciascun blocco risulta data da:
x1 = x10- x1 cosWt
x2= x20+ x2 cosWt
Ovviamente, come risulta da queste relazioni, le due masse oscillano in contro-fase in
modo tale che il CM rimanga fermo.
b) Nel caso particolare in cui le due masse sono uguali risulta m = m/2 e pertanto T
= 2p[m/2K]0.5, ossia T = 0.314 s ; le ampiezze di oscillazione dei due corpi sono
uguali e pari a x0/2 ed il CM rimane fermo nel punto mediano del segmento che li
unisce nell’istante iniziale.
23) Nel moto del sistema si devono distinguere tre diverse fasi: la prima è compresa
fra l’istante iniziale e l’istante in cui il filo raggiunge la verticale, la seconda è
quella dell’urto fra i due corpi, la terza è quella successive ad esso.
Nella prima fase di moto le sole forze agenti sulla pallina sono la forza peso mg e la
tensione T della funicella; il moto corrispondente è quello di un pendolo e la velocità
della pallina, un’istante prima dell’urto, v0 può essere determinate immediatamente
dalla conservazione dell’energia:
mv02/2 = mgl
v0 = (2gl)0.5
da cui numericamente risulta v0 = 3.96 M/s.
Nella fase successiva, quella dell’urto, sulla pallina agisce, oltre le due forze già
considerate, la forza –F dovuta al blocco; su quest’ultimo agiscono la forza peso Mg, la
reazione vincolare di appoggio del piano orizzontale N, la forza di attrito f e la forza F
applicata al blocco dalla pallina.
O
T
N
-F
F
f
mg
Mg
La forza F , applicata al blocco, e la sua reazione –F , applicata alla pallina, si esplicano
solo durante l’urto ed hanno carattere impulsivo, quindi hanno intensità molto maggiore
di tutte le altre; rispetto ad esse pertanto possiamo trascurare tutte le altre forze, non
impulsive, e quindi durante l’urto possiamo considerare nulla la risultante delle forze
esterne. In conseguenza di ciò possiamo affermare che varrà la conservazione della
qualtità di moto fra i due istanti immediatamente precedente ed immediatamente
successivo all’interazione dei due corpi. Dette v e V le velocità dopo l’urto
rispettivamente della pallina e del blocco si ha:
MV + mv = mv0
(23-1)
Per determinare completamente queste velocità è necessario fare qualche ipotesi sull’urto
e su questa base aggiungere una equazione.
a) Se l’urto è perfettamente elastico vale la conservazione dell’energia e quindi possiamo
scrivere:
MV2/2 + mv2/2 = mv20/2
Questa equazione, insieme con l’eq. (23-1) , fornisce i valori:
V = 2mv0/(m + M)
v = v0(m – M)/(m + M)
e numericamente V = 3.05 m/s v = 0.91 m/s.
Nella terza fase, dopo l’urto, la pallina torna a muoversi come un pendolo semplice:
avendo una velocità opposta a quella di v0 ruota attorno ad O in verso orario e la quota
più alta raggiunta h’ è ancora data dalla conservazione dell’energia:
h = v2/2g = l[(m – M)/(m + M)]2
da cui h = 4.3 cm.
Successivamente all’urto, sul blocco agiscono la forza peso Mg , la reazione vincolare di
appoggio N e la forza di attrito di modulo f = mN = mMg dove m è il coefficiente di
attrito. La distanza L percorsa dal blocco prima di arrestarsi è determinata dalla sua
energia cinetica nell’istante immediatamente successivo all’urto e dal coefficiente di
attrito fra piano e blocco. Dal teorema dell’energia cinetica si ottiene quindi per il
coefficiente m cercato:
- MV2/2 = -mMgL
Æ
m = V2/2gL = 4l[m/(m + M)]2/L
e quindi m = 0.215.
b) Nel caso in cui l’urto sia completamente anelastico la pallina ed il blocco si
uniscono a formare un unico corpo di massa (m + M) sospeso alla funicella. La
velocità di questo corpo al termine dell’urto è data immediatamente dalla
conservazione della quantità di moto, eq. (23-1), tenendo conto che adesso V = v,
ovvero:
V = v = mv0/(m + M)
Il moto successivo del corpo è quello di un pendolo semplice di massa (m + M) e
quindi la quota massima a cui risale è data da:
h’ = v2/2g = l[m/(m + M)]2
ovvero h’ = 11.8 cm
c) Nel caso in cui la corda sia rimpiazzata da un’asticella non è più applicabile la
conservazione della quantità di moto. Infatti dato che l’asta può esercitare, e
subire, un’azione in direzione perpendicolare ad essa, questa può esercitare sulla
pallina una forza a carattere impulsivo: così pure il perno in O esercita su di essa
una forza vincolare impulsiva, necessaria a far sì che il sistema risulti sempre
vincolato a ruotare attorno ad O. Quindi la risultante delle forze esterne al sistema
blocco più pallina consta anche di forze vincolari impulsive e pertanto non vale
più la costanza della quantità di moto. La soluzione del problema viene rimandata
ad un esercizio succcessivo perchè per essa è necessario far ricorso alla II
equazione cardinale della dinamica.
24) Si devono sostanzialmente considerare tre diverse fasi dell’evoluzione del
sistema: la prima fase in cui, a seguito dell’esplosione del materiale contenuto
nella cartuccia, il proiettile viene accelerato fino alla velocità di espulsione dalla
canna del fucile e contemporaneamente questo acquista una velocità di rinculo;
la seconda fase in cui il proiettile urta il blocchetto e si arresta al suo interno; la
terza fase in cui, a seguito della velocità acquisita dall’urto con il proiettile, il
blocco comprime la molla.
Consideriamo le forze che agiscono sui componenti il sistema nelle varie fasi del
moto e le relative equazioni di moto. Nella prima fase le uniche forze rilevanti sono
quelle impulsive che a seguito dell’esplosione si esercitano sul proiettile , S , e sul
fucile, -S; queste sono forze interne al sistema fucile + proiettile e costituiscono una
coppia di forze di azione e reazione.
-S
S
Durante questa fase, essendo la risultante delle forze esterne nulla, si deve conservare
la quantità di moto del sistema; pertanto indicata con V la velocità acquisita dal fucile
e con v quella del proiettile, tenuto conto che inizialmente la quantità di moto è nulla,
si ha:
MV + mv = 0
V = -mv/M
(24-1)
Nella seconda fase del moto il proiettile, avente una velocità v , urta in modo
completamente anelastico il blocco di massa m’ e va a formare un unico corpo di
massa (m + m’). Anche durante questa fase le uniche forze rilevanti sono quelle
impulsive che il proiettile esercita sul blocco, F, e la forza di reazione -F che il blocco
esercita sul proiettile. Essendo tutte le altre forze trascurabili è nulla la risultante delle
forze esterne agenti sul sistema proiettile + blocco.
N
-F
F
Fe
mg
m’g
Pertanto anche in questa fase vale la conservazione della quantità di moto e, detta v’ la
velocità con cui si muove l’insieme proiettile + blocco al termine dell’urto, si ha:
( m + m’ )v’ = mv
v’ = mv/( m + m’)
(24-2)
Nella terza fase agiscono sull’unico corpo blocco + proiettile le forze peso mg e m’g
la forza vincolare N del piano di appoggio e la forza elastica della molla Fe; tutte
queste forze risultano conservative per cui la massima compressione della molla è
ottenuta immediatamente dalla conservazione dell’energia:
(m + m’)v’2/2 = KX2/2
Æ
v’ = X[K/(m+m’)]0.5
(24-3)
a) Dalle equazioni (24-3) e (24-2) risulta che la velocità del proiettile è v =
X[K(m+m’)]0.5/m , ossia v = 225.7 m/s ; il fucile , in base alla equazione (24-1),
acquista una velocità, in verso opposto a quella del proiettile, pari a V = -0.68 m/s .
b) L’energia E prodotta dall’esposione, supposti nulli gli effetti dissipativi, è pari
all’energia cinetica acquisita dal proiettile e dal fucile al termine dell’espulsione dalla
canna, quindi:
E = MV2/2 + mv2/2 = m(m +M)v2/2M
Numericamente risulta E = 389 J ; questo è in realtà un limite inferiore perchè l’energia
dispersa in altri processi, in ultima analisi in calore, non è trascurabile.
d) La forza media che deve essere esercitata sul calcio del fucile per mantenerlo
fermo è uguale, ed opposta, alla forza media esercitata su di esso a causa
dell’esplosione e quindi uguale alla forza media S esercitata sul proiettile durante
la fase di espulsione di durata t. Nell’ipotesi che la forza sia costante il suo
modulo e il tempo t possono essere ricavati in vari modi equivalenti. Poichè
considerare una forza S costante equivale a dire che il moto del proiettile è
uniformemente accelerato, e quindi che la sua velocità media è pari a v/2, si ha
per la durata della fase di espulsione:
t = 2l/v
da cui, in base al teorema dell’impulso:
S = mv/t = mv2/2l
Quest’ultima relazione poteva anche essere ricavata immediatamente dal teorema
dell’energia cinetica. Numericamente si ricava t = 6.2 ms e S = 546 N.
In realtà l’ipotesi che la forza agente sul proiettile sia costante è largamente non
realistica (è sufficiente fare considerazioni elementari sull’espansione adiabatica di un
gas perfetto) e la forza impulsiva S varia considerevolmente su tempi assai più brevi
di t , rendendo conseguentemente più grande la forza media S.
25) Sul blocchetto agiscono la forza peso mg e la forza vincolare di appoggio N,
esercitata dal cuneo e perpendicolare al piano inclinato; sul cuneo agiscono la
forza peso Mg , la forza applicata ad esso dal blocchetto –N e la reazione
vincolare del piano orizzontale S. Le forze N e – N , che costituiscono una
coppia di forze azione e reazione, sono interne al sistema cuneo + blocco; le
forze peso e S sono forze esterne ad esso e risultano tutte dirette lungo la
verticale. Questo implica che la risultante delle forze esterne lungo la direzione
del piano orizzontale è uguale a zero e quindi che si conserva la componente
orizzontale della quantità di moto. Inoltre essendo le forze in gioco conservative
ed i vincoli ideali varrà durante tutto il moto la conservazione dell’energia.
Per scrivere le equazioni necessarie alla soluzione del problema consideriamo un
sistema di riferimento cartesiano con l’asse x diretto lungo l’orizzontale e giacente
nel piano su cui è posto il cuneo e l’asse y , verticale, passante per il punto in cui si
trova il blocchetto all’istante iniziale. Indichiamo con (x,y) le coordinate del
blocchetto e con X l’ascissa del centro di massa (C.M.) del cuneo ad un istante
generico.
y
S
N
x
X
-N
B
mg
q
A
x
Mg
All’istante iniziale le coordinate del blocchetto sono (0, h) e l’ascissa del CM è
indicata con X0.
a) Poichè la componente orizzontale della quantità di moto si conserva essa rimane
sempre uguale a zero; di conseguenza risulta nulla la componente orizzontale
della velocità del CM del sistema cuneo + blocco e quindi esso non si sposta
lungo l’asse orizzotale durante il moto. Imponendo questa condizione si ha subito
una equazione che lega le coordinate iniziali e finali del blocco e del CM del
cuneo:
MX + mx = M X0
Inoltre, tenuto conto che la lunghezza della base del cuneo AB è pari a b = hctgq ,
risulta che quando il blocco ha raggiunto il fondo A del cuneo la distanza fra il CM
del cuneo ed il blocco è data da:
x – X = b - X0 = hctgq – X0
Lo spostamento del cuneo DX è quindi dato da:
DX = X - X0 = - mb/(m + M) = - mhctgq/(m + M)
numericamente risulta DX = -14.4 cm.
b) La velocità del blocco v e del cuneo V sono determinate rapidamente utilizzando
la conservazione della quantità di moto lungo l’orizzontale e la conservazione
dell’energia. Indicando con vx e vy rispettivamente le componenti orizzontale e
verticale di v , scegliendo come quota di riferimento per l’energia potenziale delle
forze peso (V = 0) il piano orizzontale, si ha:
MV + m vx = 0
V = -mvx/M
MV2/2 + mv2/2 + mgy = MV2/2 + m(vx2+ vy2)/2 + mgy = mgh
Per risolvere le precedenti equazioni si deve tener conto della relazione cinematica
che lega fra loro V e le componenti della velocità v. Questa è ricavata
immediatamente differenziando la relazione geometrica, fra la coordinata XA del
vertice A del cuneo e le coordinate del blocchetto, che esprime la condizione che
esso si muova lungo il piano inclinato del cuneo:
y = (XA – x )tgq
Æ
vy = ( V - vx) tgq
Dalle precedenti equazioni si ottiene infine:
vy = - vx(1 + m/M)tgq
(25-1)
e per la componente orizzontale di v alla fine del piano inclinato:
vx = (1 + m/M)[2gh/( M/(m+M) + tg2q)]0.5
numericamente risulta vx = 3.48 m/s , vy = - 2.41 m/s e V = - 0.696 m/s.
c) La traiettoria del blocchetto puo essere determinata immediatamente
dall’equazione (25-1). Tenuto conto che la velocità è sempre tangente alla
traiettoria e che il rapporto fra la componente verticale ed orizzontale di v è
costante, ne risulta che la traiettoria è una retta di coefficiente angolare dato da:
tgq’ = - (1 + m/M)tgq
più inclinata quindi rispetto a quella dell’ipotenusa del cuneo. Tenendo conto delle
condizioni iniziali ( o equivalentemente integrando la eq. (25-1) fra l’istante iniziale
ed un istante generico t ) si ha:
y = h - x(1 + m/M)tgq
N
q
q'
-N
d) In questo caso non essendo il vincolo, rappresentato dal piano inclinato del cuneo,
fisso la reazione vincolare N , agente sul blocchetto, compie lavoro. Infatti N risulta
perpendicolare al piano inclinato , che forma un angolo q con l’orizzontale, e quindi
l’angolo fra la sua direzione e la traiettoria del blocchetto risulta pari a 90° - (q’ – q).
Parimenti compie lavoro la forza –N , esercitata dal blocchetto sul cuneo, dato che il suo
punto di applicazione si sposta lungo l’orizzontale. Questi due lavori risultano tuttavia
uguali in modulo ed opposti di segno di modo che complessivamente il lavoro delle
reazioni vincolari è nullo come deve risultare per i vincoli ideali. Il lavoro L compiuto
dalla forza –N può essere calcolato direttamente , applicando la definizione, oppure più
semplicemente dal teorema dell’energia cinetica considerato che è la sola fra le forze
agenti sul cuneo a dare un contributo diverso da zero; quindi L = MV2/2 e
numericamente L = 2.42 J .
 Le forze che agiscono sul blocchetto 1 sono la forza peso m 1g")