Università di Genova
Scuola Politecnica
Dipartimento di Informatica, Bioingegneria, Robotica e
Ingegneria dei Sistemi
Tesi di Laurea Magistrale in
Bioingegneria
Segmentazione Automatica e Stampa 3D per
la Pianificazione Pre-Chirurgica
Relatore:
Prof.
Alessandro Verri
Correlatore:
Dott.
Matteo Santoro
Studente:
Genova, 21 Marzo 2014
Andrea Schiappacasse
Anno Accademico 2012-13
Indice
1 Introduzione
1
1.1
Motivazioni e Background . . . . . . . . . . . . . . . . . . . .
1
1.2
Contributi . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.3
Organizzazione del Testo . . . . . . . . . . . . . . . . . . . . .
6
2 Segmentazione di Immagini Mediche
8
2.1
Tecniche generali di Segmentazione . . . . . . . . . . . . . . . 11
2.2
Registrazione di Immagini . . . . . . . . . . . . . . . . . . . . 22
2.3
Segmentazione basata su Registrazione . . . . . . . . . . . . . 30
2.4
Metodi Implementati . . . . . . . . . . . . . . . . . . . . . . . 37
3 Fruizione del Dato
46
3.1
Dall’Immagine alla Visualizzazione 3D . . . . . . . . . . . . . 49
3.2
Dalla Visualizzazione alla Stampa . . . . . . . . . . . . . . . . 63
3.3
Stampanti e Materiali utilizzati . . . . . . . . . . . . . . . . . 73
4 Valutazioni Sperimentali e Risultati
76
4.1
Segmentazione di Immagini TAC . . . . . . . . . . . . . . . . 77
4.2
Segmentazione di Immagini MRI . . . . . . . . . . . . . . . . 84
4.3
Stampa 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
5 Progetto di Studio Clinico Pilota
118
5.1
Studi precedenti . . . . . . . . . . . . . . . . . . . . . . . . . . 119
5.2
Modalità e Risultati Attesi . . . . . . . . . . . . . . . . . . . . 122
II
5.3
Fase 1: Classificazione della Frattura . . . . . . . . . . . . . . 123
5.4
Fase 2: Pianificazione e Intervento . . . . . . . . . . . . . . . . 125
5.5
Fase 3: Questionario di Valutazione . . . . . . . . . . . . . . . 126
5.6
Valutazioni Future sul Software . . . . . . . . . . . . . . . . . 130
6 Conclusioni
133
A Scelte Implementative
136
A.1 Elaborazione: la libreria ITK . . . . . . . . . . . . . . . . . . 136
A.2 Visualizzazione: la libreria VTK . . . . . . . . . . . . . . . . . 137
A.3 Interfaccia: la libreria Qt . . . . . . . . . . . . . . . . . . . . . 137
Bibliografia
143
III
Capitolo 1
Introduzione
1.1
Motivazioni e Background
In interventi chirurgici ortopedici complessi, nei quali sia necessaria la manipolazione delle ossa del paziente e l’impianto di strumenti prostetici, la pianificazione pre-operatoria assume un’importanza fondamentale per la buona
riuscita dell’operazione e per l’ottimizzazione della logistica operatoria anche
in termini economici.
Durante l’intervento il tempo di operare decisioni è limitato e non c’è la
possibilità di tentare diversi approcci per valutare la migliore strada da seguire. Per questa ragione, il miglioramento degli strumenti a disposizione del
medico nella fase preliminare è una priorità sentita da ortopedici e radiologi.
Ci si è soffermati in questo lavoro su interventi all’articolazione del ginocchio, ed in particolare su casi di riparazione di fratture del piatto tibiale;
in questi casi è richiesta durante l’operazione una valutazione rapida e precisa della morfologia delle ossa del paziente per la scelta dell’intervento da
attuare.
Allo stato attuale, nella pratica ospedaliera, lo studio preliminare di
un’operazione chirurgica può essere adiuvato da sistemi CAD1 /CAS2 .
1
2
CAD: Computer Aided Diagnosis
CAS: Computer Aided Surgery
1
I sistemi informatici permettono al medico di ricostruire e visualizzare in
3D la struttura di interesse a partire dalla sequenza di immagini bidimensionali ottenuta da diversi dispositivi di acquisizione, e di ottenere misure
quantitative su di essa.
Lo studio pre-operatorio, adiuvato da sistemi CAD, per come avviene
nella prassi ospedaliera, può essere riassunto nei seguenti passi:
Visualizzazione dei dati provenienti dal sistema di imaging diagnostico
scelto (e.g. Radiografia (RX), Risonanza Magnetica (RM), Ultrasuoni
(US), Tomografia Assiale Computerizzata (TAC)).
Segmentazione (identificazione e riconoscimento) delle strutture anato-
miche di interesse.
In caso di dato volumetrico, ricostruzione tridimensionale tramite Sur-
face o Volume Rendering per ottenere una migliore comprensione della
struttura anatomica.
Misura quantitativa dei dati d’interesse.
Lo studio basato su questi sistemi non permette tuttavia di avere alcuna
esperienza diversa da quella visiva della struttura di interesse, quando sono
invece le informazioni tattili ad essere fondamentali in numerose operazioni
chirurgiche.
Non esiste inoltre, salvo in sistemi CAS particolarmente avanzati, alcuna
possibilità di simulare l’intervento, per valutare diverse strategie.
Anche l’analisi delle dimensioni della struttura anatomica tramite il sistema informatico, per quanto accurata, risulta spesso insufficiente nella pratica chirurgica. L’impianto di protesi complesse, mobili o tali da consentire
la mobilità di un segmento corporeo, richiede una valutazione diretta della
compatibilità fisica dell’impianto con l’anatomia del paziente.
Le misure quantitative, inoltre, sono effettuate dal radiologo e fornite in
un secondo momento al chirurgo, che si deve affidare ad esse senza alcuna
esperienza tangibile della struttura anatomica.
2
In casi come questi la stampa 3D di un modello fisico dell’articolazione del
paziente potrebbe rappresentare un miglioramento della fase di pianificazione
pre-operatoria, con conseguenti vantaggi per chirurgo e paziente, oltre che per
il sistema sanitario.
Un sistema di questo tipo potrebbe permettere:
L’acquisizione da parte del chirurgo di maggiore confidenza con le infor-
mazioni tattili che ritroverà durante l’intervento, quando la struttura
che dovrà manipolare sarà occlusa parzialmente o totalmente alla vista
da altri tessuti.
La misura accurata ed immediata delle misure fisiche della struttura
anatomica del paziente, dando la possibilità di provare direttamente la
compatibilità dimensionale con strumenti prostetici da usare successivamente in fase operatoria.
La possibilità di studiare l’intervento e di fare tentativi preliminari con
strumenti chirurgici per simularlo, direttamente su di un modello 1:1 il
più fedele possibile alla struttura anatomica del paziente da operare.
Se questo sarebbe stato inattuabile fino a pochi anni fa, l’esplosione nell’ultimo quinquennio del mercato delle stampanti 3D, il loro avanzamento
tanto nella tecnologia quanto nei materiali, e non ultimo il crollo dei prezzi di
macchine professionali, rendono questa prospettiva tutt’altro che utopistica.
Il forte interesse dei medici dell’E.O. Ospedali Galliera di Genova, la cui
collaborazione è stata fondamentale per portare avanti questo progetto, ha
confermato che l’idea di una stampante 3D integrata nel flusso del lavoro di
un dipartimento di radiologia, o dell’utilizzo di un servizio di stampa esterno
fornito da terzi, potrebbe essere percorribile in tempi brevi.
Per le motivazioni descritte si rende utile per la pratica ospedaliera una
piattaforma software capace di fornire, oltre a quanto già presente nei tradizionali sistemi di archiviazione di immagini medicali(PACS3 ), anche gli
strumenti per mettere a punto un modello pronto per la stampa 3D.
3
PACS: Picture Archiving and Communication System
3
Durante lo sviluppo di questa tesi si sono volute gettare le basi per la
creazione di un sistema di questo tipo.
Per quanto il lavoro svolto possa essere facilmente generalizzato su diversi segmenti corporei, ci si è concentrati sul segmento anatomico delle ossa
dell’articolazione del ginocchio e sulle relative patologie, avendo rilevato un
maggior interesse per questo tipo di interventi dal confronto con i medici.
1.2
Contributi
L’obiettivo prefissato è la realizzazione di una piattaforma completa capace
di gestire tutte le fasi di produzione di un modello tridimensionale pronto ad
essere stampato.
Si tratta di un progetto che presenta molteplici sfaccettature e necessita
l’integrazione di tecnologie diverse tra loro.
I maggiori contributi apportati al problema sono stati:
Sviluppo di algoritmi di segmentazione per estrarre dall’immagine TAC
o RM ad alta definizione una superficie ossea di interesse.
Per il caso di immagini TAC, fornite dall’E.O. Ospedali Galliera di Genova, è stato sviluppato un sistema di segmentazione semi-automatico
che mostra ottimi risultati su ossa sane, e permette un rapido raffinamento manuale nel caso, più complesso, di ossa fratturate.
Per il caso di immagini RM è stato implementato un algoritmo di segmentazione automatica delle ossa, basato su un metodo Multi-Atlante
(Utilizzando il database fornito dal Grand Challenge ‘Segmentation of
Knee Images’ del MICCAI 20104 ), con l’idea di estenderlo in futuro
alla segmentazione della cartilagine e di altri tessuti.
Progettazione e realizzazione di una piattaforma capace di mostrare
e gestire il dato estratto in due e tre dimensioni, tenendo conto delle
4
MICCAI: Medical Image Computing and Computer Assisted Intervention
4
necessità dell’utilizzo in sede ospedaliera, con particolare attenzione
alla fase operatoria.
E’ stata realizzata una piattaforma software che, oltre a permettere la
segmentazione delle immagini, permettesse la fruizione completa del
dato estratto attraverso una visualizzazione delle mesh tridimensionali
delle superfici estratte tramite Surface Rendering, e l’interazione con
esse.
Nell’ottica di rendere fruibile la visualizzazione 3D in sala operatoria
senza la necessità di utilizzare mouse e tastiera, è stata implementata
una modalità di interazione con la scena tramite gesti, sfruttando la
periferica hardware Leap Motion©5 .
Implementazione delle funzionalità legate alla stampa 3D permettendo
la conversione nel corretto tipo di dato e l’inserimento di un sostegno
fisico per le strutture sospese.
É stata resa possibile la conversione della mesh ottenuta al punto precedente in formato STL6 , passo necessario per la comunicazione con
i software delle stampanti, e la preparazione del modello alla stampa
tramite l’aggiunta manuale di ponti fisici tra segmenti ossei disconnessi.
L’utilizzo della piattaforma nello stato attuale, ha permesso la produzione di quattro modelli fisici, sfuttando stampanti basate su diverse
tecnologie.
Lo sviluppo di questo lavoro è stato portato avanti attraverso una collaborazione tra il DIBRS, l’azienda Camelot Biomedical Systems s.r.l. e l’E.O.
Ospedali Galliera di Genova.
I modelli ottenuti sono serviti come base per ottenere indicazioni dai
radiologi e dagli ortopedici dell’ E.O. Ospedali Galliera di Genova su come
proseguire il lavoro esistente.
5
Leap Motion è una società specializzata nel fabbricare tecnologie di rilevazione del
movimento. https://www.leapmotion.com/
6
STL: STereoLitography
5
I feedback ottenuti sono molto positivi e una prima analisi di costi e benefici della procedura di stampa 3D ha permesso la definizione di un protocollo
sperimentale per uno studio clinico, per il quale è stato chiesto un finanziamento da parte dell’E.O. Ospedali Galliera: le linee guida del progetto cosı̀
configuratosi sono riportate nel capitolo conclusivo di questo elaborato.
1.3
Organizzazione del Testo
In questo elaborato sarà presentato quanto studiato e realizzato per lo sviluppo del progetto descritto nelle sezioni precedenti.
I capitoli sono suddivisi per macro-tematiche:
Nel Capitolo 2 sarà presentato lo stato dell’arte dei metodi di seg-
mentazione per immagini medicali. Verrà inoltre presentato il problema della registrazione di immagini, e come se ne possa sfruttare la
soluzione in metodi di segmentazione avanzati. Saranno presentati infine i metodi di segmentazione implementati nello sviluppo di questo
progetto.
Nel Capitolo 3 saranno analizzate le tecniche disponibili per visualiz-
zare il dato estratto dai sistemi di imaging ospedaliero. Sarà mostrato
il flusso di lavoro che permette di passare dal dato grezzo alla visualizzazione tridimensonale nel nostro sistema, e le modalità di interazione
con la scena 3D implementate. Saranno presentate le tecnologie disponibili per ottenere prototipi fisici, con particolare riferimento a quelle
impiegate nel corso del progetto.
Nel Capitolo 4 saranno presentati i risultati qualitativi e quantitativi
dei metodi di segmentazione sviluppati. Si presenteranno inoltre i quattro modelli fisici realizzati tramite stampa 3D nel corso del progetto, e
le potenzialità individuate nei vari casi dai medici dell’E.O. Ospedali
Galliera.
6
Nel Capitolo 5 sarà presentato il progetto di studio clinico pilota nato
in seguito alla presentazione dei risultati ai medici dell’E.O. Ospedali
Galliera di Genova, e le proposte di esperimenti futuri per l’utilizzo
all’interno dello studio della piattaforma software sviluppata.
Nell’Appendice A saranno presentate le scelte implementative com-
piute nella realizzazione della piattaforma software.
7
Capitolo 2
Segmentazione di Immagini
Mediche
L’estrazione di informazioni dalle immagini mediche non è un problema banale. Nella maggior parte dei casi l’operazione fondamentale per estrarre
contenuto utile dai dati di imaging è la fase di segmentazione.
Segmentazione: Data un’immagine, la sua divisione spaziale in di-
verse regioni d’interesse. Nel caso più semplice, le regioni sono parti
anatomiche che hanno proprietà uniformi. In quello più complesso sono
aree che possono contenere forti disomogeneità.
L’estrazione della regione di interesse è necessaria per qualunque analisi
quantitativa dell’area anatomica scelta.
Questo compito è ancora oggi effettuato spesso da un operatore umano.
Se questa operazione era accettabile sulla singola immagine della lastra radiografica, o su volumi TAC dallo spacing molto ampio, risulta attualmente
troppo lunga per l’operatore a causa del drastico aumento del numero di
immagini da analizzare fornite dalle tecnologie più recenti.
Lo sviluppo di algoritmi automatici o semi-automatici per la segmentazione di strutture anatomiche d’interesse è un tema sempre attuale, nonostante
sia affrontatissimo nella letteratura scientifica da tempo.
Questo compito non è di semplice attuazione per diverse ragioni:
8
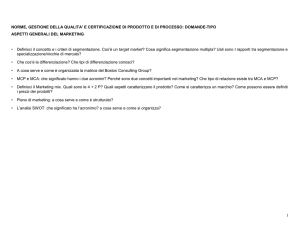
Figura 2.1: Attraverso la fase di segmentazione, la zona d’interesse nell’immagine acquisita viene salvata in un’immagine binaria, nella figura sovrapposta
in rosso.
Disomogeneità: A causa della natura dei tessuti e delle modalità di
imaging utilizzate, l’intensità dei voxel spesso non è omogenea all’interno dello stesso tessuto.
Rumore: nonostante il crescente siluppo delle tecnologie impiegate
nell’acquisizione, molti sistemi di imaging hanno ancora un forte rumore e un basso contrasto che rendono difficile il riconoscimento dei
confini tra diversi tessuti.
Variabilità Le immagini mediche sono un tipo di dato molto varia-
bile. Il singolo paziente può cambiare postura in diverse visite. Patologie come tumori o fratture possono causare modificazioni significative nelle parti anatomiche colpite. Questa variabilità intrinseca rende
difficoltoso sfruttare informazioni a priori.
Diversi algoritmi che stanno ottenendo crescente popolarità e che potrebbero permettere almeno in parte di risolvere questi problemi sono raggruppabili sotto la classe di tecniche di segmentazione basate sulla registrazione.
Per chiarire cosa si intende, si introducono due problemi comuni nell’elaborazione di immagini mediche: registrazione e ricerca delle corrispondenze.
9
Registrazione: Date due immagini, o un modello e un’immagine delle
stesse parti anatomiche, trovare una trasformazione che allinei le parti
corrispondenti.
Ricerca delle Corrispondenze: Dati due set di punti o più generi-
camente di elementi, e una misura di similarità tra di loro, trovare una
funziona che faccia corrispondere a un elemento di un set uno dell’altro
e massimizzi la somiglianza (secondo un criterio scelto) di ogni coppia
cosı̀ creata.
Registrazione e ricerca delle corrispondenze sono problemi strettamente
legati, la cui risoluzione può essere sfruttata anche per la segmentazione delle
immagini.
Se la corrispondenza è nota a priori, l’intero processo di registrazione,
date le coppie di punti nelle due immagini, si risolve con il calcolo della
migliore trasformazione per descriverle. Se non lo è, la registrazione deve
comprendere un meccanismo che permetta l’assegnamento ad ogni punto del
suo corrispondente.
I metodi di segmentazione basati su registrazione rientrano nel secondo
caso: partendo da una o più immagini segmentate o da un modello statistico
della zona d’interesse, sfruttano un processo di registrazione per applicare
più o meno direttamente il risultato all’immagine per cui la segmentazione
non è nota.
Nel seguito di questo capitolo, si introdurranno le tecniche di segmentazione più utilizzate in letteratura, si presenterà più in dettaglio il problema
della registrazione, e infine si presenteranno i metodi che sfruttano la sua
risoluzione per ottenere una segmentazione.
10
2.1
Tecniche generali di Segmentazione
In questa sezione sarà presentata una panoramica sui metodi di segmentazione più utilizzati in letteratura nelle applicazioni ad immagni mediche.
Ogni sottosezione presenterà una classe di tecniche accomunate da una base
comune.
Si procederà in ordine di complessità algoritmica, partendo dalle tecniche
più semplici e affermate storicamente in letteratura, e concludendo con le
classi di metodi più innovative o computazionalmente costose.
Per la descrizione dei metodi di segmentazione più avanzati che sfruttano
tecniche di registrazione si rimanda invece alla sezione 2.3.
La trattazione sarà di carattere generale, ma saranno sottolineate le applicazioni al caso della segmentazione dell’articolazione del ginocchio, oggetto
dell’applicazione dei metodi sviluppati in questo progetto.
2.1.1
Sogliatura
Una classe di algoritmi di segmentazione che sfruttano direttamente l’intensità dei singoli pixel/voxel è quella delle tecniche basate su sogliatura.
In linea generale, durante il processo di sogliatura di un’immagine in scala
di grigi, ad ogni pixel viene assegnata un’etichetta (‘label’) che ne dichiara
l’appartenenza o meno alla regione di interesse.
Il criterio decisionale è usualmente associato al superamento di una soglia
di intensità, partendo dalla forte assunzione che la struttura cercata abbia
un valore di intensità in generale diverso rispetto ai pixel del background.
A seconda del grado di evoluzione dell’algoritmo, e della complessità richiesta, le soglie possono essere assolute, note a priori per la natura del
problema, o determinate sulla base della statistica dell’immagine globale o
locale.
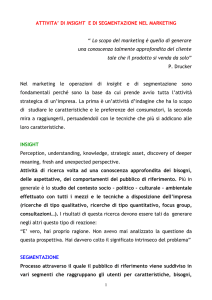
La correttezza del risultato dipende dalla sufficiente separabilità dell’istogramma delle distribuzioni di grigio nell’immagine (vedi Figura 2.2).
11
Figura 2.2: Esempio di immagini sintetiche e relativi istogrammi; l’aggiunta
progressiva di rumore da sinistra verso destra rende difficile individuare le
due classi attraverso l’analisi dell’istogramma.
In tal caso utilizzando una singola soglia T , il metodo è descrivibile
formalmente in modo molto semplice come:
1, se f (x, y) > T
g(x, y) =
0, altrimenti
Dove f (x, y) rappresenta il valore di grigio di un’immagine nel pixel (x, y).
Nella maggior parte delle applicazioni la variabilità delle immagini da segmentare richiede una scelta automatica della soglia, direttamente dipendente
dal caso selezionato: si rende necessario un criterio decisionale per la scelta
di T .
Questa scelta viene spesso vista come un processo iterativo riassumibile
come:
1. Selezione di una prima soglia T .
2. Segmentare l’immagine usando T come soglia: formando due gruppi
G1 e G2 .
12
3. Scegliere un nuovo valore di T , basandosi sulla statistica dei due gruppi.
4. Ripetere i passi da 2 a 3 finchè il cambiamento di T non sia inferiore a
un valore di tolleranza fissato.
I metodi basati su sogliatura assoluta sono incapaci di riconoscere cambiamenti di luminosità all’interno della stessa immagine, per cui la stessa
struttura può apparire con intensità differenti in diverse zone.
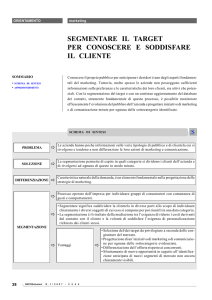
Per ovviare a questo problema si ricorre ad algoritmi a sogliatura variabile.
Figura 2.3: Esempio di sogliatura variabile; l’immagine sintetica è divisa in
6 zone e segmentata in ognuna di esse separatamente.
In questo tipo di algoritmi, la soglia è stimata per ogni punto (o per ogni
regione dell’immagine dove si consideri uniforme l’illuminazione, vedi figura
2.3) basandosi su una proprietà del suo intorno.
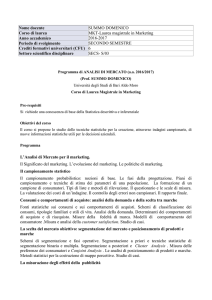
Pur nella loro semplicità i metodi basati su sogliatura permettono di
ottenere buoni risutati nell’estrazione di tessuti ossei da immagini TAC (vedi
Figura 2.4), sfruttando la natura assoluta dei valori di intensità registrati
(che rispecchiano i valori di permeabilità alla radiazione dei tessuti, misurati
in unità chiamate ‘Hounsfield Unit’).
Il fatto che i tessuti ossei abbiano i valori più alti nella scala delle unità
di Hounsfield permette di non incorrere in problemi di sovrasegmentazione,
a patto che non sia presente eccessivo rumore o artefatti legati alla presenza,
ad esempio, di strumenti prostetici.
13
Figura 2.4: Applicazione di una sogliatura assoluta ad un immagine TAC
reale.
2.1.2
Region Growing
Le tecniche basaste sul raggruppamento di gruppi di pixel/voxel in regioni
via via più grandi utilizzando criteri predefiniti per guidarne l’espansione
sono raggruppabili sotto la classe degli algoritmi di Region Growing.
L’approccio più comune si basa sull’utilizzo di punti o sottoregioni di
partenza , denominate ‘seed’, a cui viene assegnata una classe, da cui iniziare
l’espansione. Ad ogni iterazione, una serie di pixel vicini (e.g. 8-connessi o
in un intorno predefinito) che abbiano caratteristiche simili (e.g. entro un
range di intensità) sono assegnati alla stessa classe.
La modalità di selezione dei punti di partenza è diversa a seconda della
natura del problema.
Nel caso più semplice, in un approccio semi-automatico, un utente può
selezionare manualmente i punti di partenza. Alternativamente, in un approccio automatico:
Se è disponibile informazione a priori i seed possono essere automatica-
mente assegnati (e.g. per posizione nota dell’immagine del centro della
14
struttura di interesse, o se è possibile utilizzare tutte le zone con una
determinata intensità come regioni di partenza)
Se non è disponibile informazione a priori, l’inizializzazione può pre-
vedere il calcolo, per ogni pixel/voxel dell’immagine, di un insieme di
proprietà (features). Se le features possono essere raggruppate con un
meccanismo di clustering, allora i pixel/voxel che hanno valori vicini ai
centroidi dei cluster potranno essere utilizzati come seed.
Figura 2.5: Applicazione di un algoritmo di region growing ad un immagine
TAC reale, con posizionamento del seed evidenziato dall’indicatore verde.
La scelta dei criteri di crescita, di similarità e di stop dipende fortemente
dal problema considerato e dal tipo di dato presente nell’immagine.
Nel caso di immagini in scala di grigio l’analisi delle regioni potrà essere
effettuata utilizzando descrittori locali basati sulle intensità dei voxel oppure
su loro proprietà spaziali (es. tessitura).
Descrittori computazionalmente più costosi possono comprendere la forma e le dimensoni delle regioni e guidarne la crescita di conseguenza.
Le variazioni di questo tipo di tecniche sono molteplici. Tra le più note, gli algoritmi basati su ‘watershed’ utilizzano l’immagine del gradiente
15
delle intensità e determinano la crescita progressiva delle regioni attraverso
l’inclusione di isolivelli di gradiente mano a mano più alti ad ogni iterazione.
Come nel caso della sogliatura, anche le tecniche di Region Growing basate semplicmente su intensità possono sfruttare il vantaggio della natura
assoluta delle intensità delle immagini TAC, e a valle di una fase di post
processing delle aree segmentate si ottengono buoni risultati per l’estrazione
delle ossa[43].
2.1.3
Active Contour
I metodi basati su ‘Active Contour’ (AC nel seguito) prendono in considerazione una linea chiusa, in 2D, o una superficie, in 3D, inizializzata
manualmente o automaticamente, e iterativamente la modificano facendola
espandere o contrarre a seconda delle proprietà dell’immagine locali o globali.
Nella formulazione originale di Kass[44] la segmentazione viene effettuata
tramite l’evoluzione di un contorno, guidata dal gradiente dell’immagine nei
punti di controllo della curva.
Partendo da questo modello, nella maggior parte delle applicazioni si propone un AC dove l’evoluzione della segmentazione è modellata da due termini: l’energia interna che dipende dal comportamento locale del contorno,
e quella esterna che deriva dalle feature dell’immagine.
Lo sviluppo di queste tecniche è stato fortemente incentivato dalla possibilità di applicazione a questi metodi della tecnica di ‘front-propagation’
tramite level set[63], che garantisce accuratezza e stabilità dell’evoluzione e
permette di tenere conto di variazioni topologiche durante l’evoluzione del
contorno.
Nella formulazione classica:
Econtorno = Einterna + Eesterna
dove, definito un contorno C(s(x, y)), con s(x, y) compreso tra 0 e 1:
16
Z
1
Einterna =
α|C 0 (s)|2 + βC 00 (s)|2 ds
0
0
00
con C (s) e C (s) derivate prima e seconda del contorno, α e β parametri
che ne controllano tensione e rigidezza.
Z
1
Eimage (C(s))ds
Eesterna =
0
dove Eimage è una funzione che ha il suo minimo nei massimi del gradiente
dell’immagine, cosı̀ che la sua minimizzazione attragga il contorno vicino agli
edge.
Una variante che cerca di minimizzare contemporaneamente la lunghezza
della curva e la distanza da punti ad alto gradiente usando una metrica non
euclidea è quella dei ‘Geodesic Active Contour’[12].
In studi successivi[60] si propone di sfruttare anche informazioni sulla
tessitura (nella forma della varianza dell’immagine) per ottenere un risultato migliore in casi rumorosi o con disomogeneità marcate nella zona da
segmentare.
I metodi che si basano principalmente sulla ricerca di edge risultano tuttavia poco adatti per quei casi, comuni in campo medicale, in cui i contorni
non sono ben definiti, a causa di artefatti, scarso contrasto, o tessuti adiacenti
poco discriminabili tra loro nelle immagini.
Un approccio basato su Active Contour e Level Set, che risolve almeno
parzialmente questo tipo di problemi, viene sviluppato da Chan e Vese[13]:
l’evoluzione del contorno viene guidata da un funzionale dipendente non dal
gradiente locale dell’immagine, ma soltanto dalle proprietà globali delle zone
segmentate.
Il metodo noto come ‘Chan-Vese’, pur non esente da problemi quando applicato a immagini mediche, ha influenzato gran parte degli algoritmi basati
su AC presentati negli ultimi anni, in gran parte espansioni di questo, o sue
combinazioni con altri approcci.
Le applicazioni ad immagini TAC del ginocchio sono molteplici [79, 80,
10]. Per risolvere il problema della non omogeneità all’interno delle regioni da
17
Figura 2.6: Segmentazione di immagini problematiche utilizzando l’AC
descritto da Calder et al. in [10]
segmentare (che comprendono osso corticale, osso spongioso e midollo, che
presentano valori d’intensità anche molto lontani tra loro), e dell’eccessiva
sensibilità a minimi locali, questi metodi prevedono l’aggiunta di altri termini
al modello per aumentarne l’efficacia.
2.1.4
Graph Cut
Un’altra categoria di algoritmi, che va sotto il nome di ‘Graph Cut’ o ‘Clustering Spettrale’, raggruppa le tecniche di segmentazione che si rifanno alla
teoria dei grafi.
Nella forma più semplice, queste tecniche prevedono la creazione di un
grafo ‘s-k’ tra i voxel dell’immagine, assegnando un peso ad ogni lato dipendente dalle particolari proprietà della segmentazione che si desidera ottenere.
Si computa quindi quale taglio bilanciato sul grafo comporti globalmente il minor costo in termini di lati rimossi seguendo l’algoritmo di ‘Minimum Cut-Maximum Flow. Il risultato della separazione è la segmentazione
cercata.
Questo tipo di tecnica viene presentata da Wu e Lehay[85], e successivamente sviluppata e resa più efficiente da Boykov[9], già in questi lavori si
18
mostrano esempi di applicazioni efficaci su immagini mediche.
Figura 2.7: Separazione di ossa del piede contigue in [58]
Formalmente il problema consiste nel trovare k partizioni A1 ...An del
grafo tali da minimizzare la quantità:
n
1X
W (Ai , Āi )
2 i=1
Dove W e’ la matrice di similarità del grafo e (Ai , Ā) è la somma delle
similarità tra gli elementi di A ed il suo complementare.
Figura 2.8: Separazione di frammenti ossei in seguito a frattura del bacino
in [27]
Si può mostrare che la minimizzazione di questa quantità è un problema
risolvibile con metodi di algebra lineare.
Le applicazioni alla segmentazione di immagini mediche nella recente letteratura sono molteplici, sia direttamente per l’estrazione di una zona anato19
mica in modo automatico [1, 51, 6] o semiautomatico [73], sia in combinazione con altri metodi per raffinare una segmentazione precedente, separando
ad esempio segmenti ossei diversi [58], o frammenti presenti a seguito di
frattura[27] (vedi figura 2.8).
2.1.5
Classificazione
Molte tecniche che incorporano conoscenza a priori sfruttano algoritmi di
pattern recognition per trovare un classificatore f che mappi l’immagine, o
specifiche regioni dell’immagine, su un numero discreto di classi Ci .
Nei problemi di classificazione, un’immagine è tipicamente vista come
un vettore vi di feature. Lo spazio delle features estratte dell’immagine è
partizionato in classi. Il classificatore f determina a quale classe appartiene
ogni vettore estratto.
f (vi ) = Ci
.
In generale i parametri ottimi del classificatore f sono ottenuti applicando
algoritmi di machine learning a partire da un traning set: nella segmentazione
di immagini mediche, tipicamente il training set è ottenuto da segmentazioni
manuali effettuate da esperti medici.
La scelta più semplice è quella di un classificatore di tipo ‘nearest neighbor’ dove ogni pixel è assegnato alla classe più vicina nello spazio delle
features estratte dal training set. Questo metodo tuttavia è molto sensibile
al rumore e non tiene conto della possibilità che il pixel rappresenti un valore
limite di una qualche altra classe più lontana rispetto a quella scelta.
Un approccio semplice che risolve questi problemi è chiamato ‘k-Nearest
Neighbor’ (k-NN) e prevede l’analisi dei k elementi del training set più vicini
nello spazio delle feature al pixel considerato. Ogni elemento cosı̀ trovato
voterà per la classe a cui appartiene, eventualmente a meno di un peso inversamente proporzionale alla distanza calcolata. Il pixel viene assegnato alla
classe che ottiene lo score più alto.
20
Un’applicazione ad immagini mediche del ginocchio di classificatori k-NN
che ha avuto grande risonanza in letteratura è quella di Folkesson[26] per
segmentare la cartilagine del ginocchio su immagini RM-T1.
Un altro classificatore spesso impiegato in letteratura[47, 49], sfrutta la
teoria della Support Vector Machine[18], che si basa sulla ricerca dell’iperpiano che massimizzi la separazione dei dati nello spazio delle feature attraverso
un algoritmo iterativo. Dati {v1 , v2 , . . . , vn } vettori di feature d-dimensionali,
viene assegnata ad ognuno di essi un’etichetta a seconda che giacciano da un
lato o dall’altro dell’iperpiano considerato.
Per gestire dati non separabili linearmente può essere sfruttata la teoria
dei kernel[4], che permette di ottenere classificatori non lineari.
21
2.2
Registrazione di Immagini
La registrazione di immagini è generalmente definita nell’ambito della computer vision come il processo di allineamento di due o più immagini della
stessa scena catturata in tempi diversi, da diverse angolazioni, o da diversi
sensori.
In modo più generale, si considera registrazione di immagini ogni processo capace di determinare una trasformazione che mappi ogni punto di
un’immagine di riferimento (‘reference’) su una seconda immagine (‘target’).
Questo processo è fondamentale in tutti quei metodi che richiedano di
estrarre informazioni spaziali basandosi su immagini diverse.
In campo medicale la registrazione di immagini è importante in differenti
applicazioni:
Analisi dell’evoluzione di una struttura d’interesse in serie temporali.
Analisi dell’evoluzione di una struttura d’interesse in studi longitudi-
nali.
Fusione di immagini acquisite in modalità differenti (Figura 2.9).
Confronto di una struttura d’interesse tra pazienti diversi in studi
trasversali.
Sovrapposizione di atlanti o modelli in metodi di segmentazione avan-
zati.
La registrazione di immagini comporta una serie di problemi legati:
Al tipo di trasformazione che ci si aspetta di ottenere.
Alla scelta del criterio per considerare simili due immagini.
Al metodo per trovare la trasformazione migliore in tempi e costi com-
putazionali accettabili.
Al metodo di ricampionamento dell’immagine nella nuova griglia.
22
Figura 2.9: Fusione di immagini acquisite con sistemi di imaging diversi (da sinistra verso destra: TAC, PET, fusione delle precedenti tramite
registrazione).
La scelta di questi parametri è fortemente legata al problema da affrontare.
Nel proseguio di questa sezione introdurremo il framework di registrazione
utilizzato in questo progetto, e analizzeremo più in dettaglio le componenti
utilizzate per la registrazione nel metodo multi-atlante implementato.
2.2.1
Framework
In figura 2.10 è illustrato il framework utilizzato per la registrazione delle
immagini in questo progetto.
Il problema di registrazione è scomponibile in elementi base:
Immagine fissa/Target: l’oggetto fisso.
Immagine mobile/Reference: l’oggetto che sarà trasformato.
Trasformazione: il tipo di mapping che porterà ogni punto dello spazio
fisico del reference nello spazio fisico del target.
23
Figura 2.10: Schema del framework di registrazione.
Metrica: la misura che indica quanto siano ‘simili’ target e reference
durante e dopo il processo iterativo di trasformazione.
Interpolatore: la tecnica utilizzata per interpolare nella nuova griglia
immagine i valori del reference dopo il processo iterativo di trasformazione.
Ottimizzatore: il metodo utilizzato per trovare durante il processo
iterativo di trasformazione i migliori parametri per massimizzare la
metrica.
Il tipo di trasformazione, il criterio di similarità (la metrica) e l’ottimizzatore sono in gran parte indipendenti e selezionabili a piacimento per la
corretta risoluzione del problema considerato.
2.2.2
Registrazione Non Rigida
Una classificazione fondamentale distingue tra metodi di registrazione rigida
e non rigida.
Nel primo caso nel processo iterativo di registrazione un’immagine è semplicemente ruotata o traslata. Per il buon funzionamento di questo tipo di
metodi deve essere verificata la forte assunzione che tra le immagini vi sia
un cambiamento solo di posa.
24
Nella maggior parte dei casi questa semplificazione non può essere verificata a causa di molteplici fattori tra cui:
Differenze nel sistema di acquisizione impiegato.
Variabilità biologica inter-paziente della struttura considerata.
Evoluzione temporale nel singolo paziente della struttura considerata.
Deformazioni dei tessuti molli dovuti a cambiamento di posizione tra
due acquisizioni successive nello stesso paziente.
Ed è quindi richiesto un sistema di registrazione che preveda traformazioni
non rigide.
Trasformazioni Affini
Una trasformazione si definisce affine se:
Conserva le proprietà di collinearità, ovvero tutti i punti che giacciono
su una linea continuano a giacere sulla stessa linea, e le rette parallele
rimangono tali dopo la trasformazione.
Conserva i rapporti tra le distanze, ad esempio il punto medio di un
segmento rimane tale dopo la trasformazione.
Questa definizione implica che la trasformazione affine non conserva necessariamente gli angoli compresi tra due linee o le distanze tra i punti
dell’immagine (vedi figura 2.11).
Una qualunque trasformazione affine tra due spazi tridimensionali può
essere descritta come combinazione di una trasformazione lineare e di una
traslazione.
In forma matriciale, utilizzando un sistema di coordinate omogenee la
trasformazione:
T (P) =
M3x3 T3x1
0
1
25
!
p3x1
1
!
Figura 2.11: Trasformazione affine.
Dove M3x3 è la matrice che descrive la trasformazione lineare e T3x1 è la
matrice che descrive la traslazione.
Trasformazioni libere tramite B-Spline
L’idea base delle trasformazioni libere è la deformazione di un oggetto tramite
la manipolazione di una griglia di punti di controllo (vedi figura 2.12).
In alcune applicazioni (e.g. Thin Plate Splines e Elastic Body Splines)
ogni punto di controllo influenza globalmente tutti gli altri, e se si desiderano
griglie fini il calcolo della trasformazione diventa computazionalmente troppo
costoso.
Figura 2.12: Trasformazione libera.
26
Un metodo ‘a supporto limitato’, in cui ogni punto di controllo influenza
solo localmente la trasformazione dell’immagine, è quello basato sull’interpolazione tramite BSpline. Si può descrivere formalmente come segue, secondo
la formulazione di Rueckert[67]:
Definito il dominio del volume dell’immagine come
Ω = {(x, y, z)|0 ≤ x ≤ X, 0 ≤ y ≤ Y, 0 ≤ z ≤ Z}
Sia Φ la griglia di di dimensioni nx × ny × nz dei punti di controllo φi,j,k
con spacing uniforme δ.
La trasformazione è definibile come:
Tlocal (x, y, z) =
3 X
3
3 X
X
Bl (u)Bm (v)Bn (w)φi+l,j+m,k+n
l=0 m=0 n=0
dove
i = bx/nx c − 1, j = by/ny c − 1, k = bz/nz c − 1
u = x/nx − bx/nx c , v = y/ny − bx/nx c , w = z/nz − bz/nz c
e definite:
B0 (u) = (1 − u)3 /6
B1 (u) = (3u3 − 6u2 + 4)/6
B2 (u) = (−3u3 + 3u2 + 3u + 1)/6
B3 (u) = u3 /6
Il parametro fondamentale da considerare nell’applicazione di questo tipo
di trasformazione a un processo di registrazione è la risoluzione della griglia
Φ:
Lo spacing δ determina la natura locale o globale della trasformazione.
Griglie molto larghe permettono di gestire trasformazioni di feature
globali dell’immagine, mentre aumentando via via la finezza si possono
modellare singolarmente dettagli sempre più piccoli dimensionalmente.
Il numero di nodi determina i gradi di libertà disponibili. Aumen-
tandoli si aumentano contemporaneamente versatilità e complessità
computazionale di un processo di registrazione.
27
Un approccio multi-risoluzione che preveda passi successivi di rifinitura
utilizzando griglie mano a mano più fini è una soluzione spesso utilizzata per
bilanciare questi due compromessi.
Scelta della Metrica
Le scelte della metrica per una segmentazione non rigida è una fase delicata,
la scelta ottima è fortemente dipendente dal problema considerato.
Si elencano nel seguito le scelte più comuni e si evidenziano i pro e contro
di ogni tecnica.
Somma delle Differenze Quadrate:
SSD =
1 X
(T (x) − S(t(x)))2
N X
Forte assunzione che le immagini registrate siano differenti solo per un
rumore gaussiano.
Molto sensibile a variazioni larghe in un numero ridotto di voxel.
Adatta solo per registrazioni mono-modali.
Coefficiente di Correlazione:
P
(T (x) − T̄ )(S(t(x)) − S̄)
CC = pPX
2
2
X (T (x) − T̄ ) (S(t(x)) − S̄)
Assunzione di una relazione lineare tra le intensità delle immagini.
Adatta solo per registrazioni mono-modali.
Mutua Informazione:
M I = HT + HS − HT S
con HT = −
P
i
Pi log Pi , HS = −
P
i
Qi log Qi e HT S = −
P
i,j
pij log pij
dove Pi e Qi sono le probabilità dell’occorrenza dell’intensità i nell’immagine
mobile e fissa e pij è la probabilità congiunta dell’occorrenza di i e j nelle
due immagini alla stessa posizione.
28
Assunzione solo di una relazione probabilistica tra le intensità delle
immagini.
Adatta sia per registrazioni mono-modali sia multi-modali.
La mutua informazione è il tipo di metrica più versatile e viene correntemente utilizzata nella maggior parte delle applicazioni di registrazione non
rigida di immagini mediche.
29
2.3
Segmentazione basata su Registrazione
La risoluzione del problema della registrazione può essere sfruttata efficacemente da varie classi di tecniche di segmentazione, per effettuare il matching tra immagini o modelli matematici della struttura di interesse in cui la
divisione in regioni è nota, con l’immagine target da segmentare.
Queste tecniche, computazionalmente molto costose per dati volumetrici,
hanno visto un grande sviluppo negli ultimi anni grazie all’aumento della
potenza computazionale disponibile a prezzi accessibili.
Anche i già presentati metodi basati su Active Contour (sezione 2.1.3),
utilizzano concettualmente un framework assimilabile a quello di registrazione, dovendo modificare iterativamente il contorno o la superificie, per trovarne il miglior posizionamento sull’immagine dati dei vincoli a priori (e.g.
presenza di edge, regioni uniformi, contorno morbido).
Salvo che in tecniche ibride[53], tuttavia, data un’inizializzazione del
contorno, non è prevista l’inclusione di informazione a priori sulla forma
o sull’aspetto finale della segmentazione da ottenere.
Saranno presentate nel seguito due classi di tecniche che fanno invece
grande affidamento su queste informazioni e sfruttano la risoluzione del problema della registrazione di modelli più o meno completi della struttura di
interesse ed ottenere la segmentazione.
2.3.1
Tecniche basate su Modelli Attivi di Forma e
Apparenza
Un approccio che sfrutta conoscenza a priori per generare un modello di
forma da registrare ad un’immagine target va sotto il nome di Active Shape
Model (ASM)[16].
In questo approccio, il modello statistico di forma è l’equivalente dell’immagine di reference nel processo di registrazione: la risoluzione del problema
di ricerca delle corrispondenze tra questo e l’immagine target permette di
ottenere il risultato cercato.
30
Per la generazione del modello statistico è richiesto un training set di
immagini rappresentative e di punti di interesse manualmente o automaticamente annotati in modo consistente tra le diverse immagini, che comporranno
la descrizione della forma dell’immagine.
Questi possono tipicamente essere:
Reperi anatomici significativi, solitamente identificati da un esperto
umano.
Punti di giunzione dove si incontrano due zone chiaramente distingui-
bili.
Punti dove si identifica una particolare proprietà matematica (e.g. alta
curvatura, o estremi d’intensità).
Punti intermedi tra quelli trovati utilizzando uno dei metodi precedenti.
Le immagini del training set sono co-registrate insieme in modo rigido
per evitare di modellare variazioni in realtà corrispondenti a cambiamenti di
posa, permettendo la successiva derivazione della forma media risultante.
Tramite Principal Component Analysis (PCA) è possibile estrarre le componenti di variazione più influenti nel training set, e descrivere quindi ogni
forma come una somma pesata della media e delle prime m componenti. Il
modello lineare cosı̀ generato è chiamato in questi metodi Point Distribution
Model (PDM).
Definito cosı̀ il modello statistico, si effettua una ricerca nello spazio dei
parametri (non indipendenti, ma legati dai vincoli di forma) per generare il
modello che meglio descrive ogni immagine target.
Per avere un criterio di confronto, è necessario incorporare nel modello
informazioni della tessitura media nel training set nell’ intorno di ogni punto
della forma.
A questo punto ci si ritrova in una condizione molto simile al framework
di registrazione descritto in 2.2, e lo spostamento iterativo dei punti permette
31
di ottenere uno score di bontà del posizionamento attraverso il confronto tra
la tessitura media e quella effettivamente presente nell’immagine.
In lavori successivi[14] viene proposto l’uso di un approccio chiamato
Active Appearance Models (AAM), dove l’analisi statistica viene effettuata contemporaneamente su parametri di forma e di apparenza, generando,
sempre tramite PCA, un modello lineare per descriverne le variazioni.
Modellando in modo completo le intensità interne e/o esterne alla forma
considerata, senza limitarsi a profili normali o tessiture nell’intorno dei punti
di interesse è possibile creare modelli generativi, in cui cioè a partire dal modello è possibile ricreare nella sua interezza (forma e apparenza) la struttura
considerata, .
Queste tecniche sono state applicate in diversi lavori[81, 30, 84, 70], da
sole o in combinazione con altri approcci, alla segmentazione di immagini
mediche dell’area anatomica del ginocchio.
2.3.2
Tecniche basate su Atlanti
Le tecniche basata su Atlanti pongono le proprie fondamenta sull’osservazione che la segmentazione è fortemente correlata con l’apparenza dell’immagine. Questi approcci sono diventati un paradigma standard per lo sfruttamento di conoscenza a priori nella segmentazione di immagini mediche [21,
38], e sono fortemente radicati in letteratura soprattutto in applicazioni a
strutture cerebrali.
Nella tecniche basate su atlanti, una segmentazione manuale o semiautomatica è effettuata su un’immagine di reference per costruire una mappa
di label chiamata ‘atlante’.
Data un’immagine target, l’immagine di reference viene registrata su
di essa: l’applicazione della trasformazione risultante all’atlante produce la
segmentazione voluta, a meno di rifiniture successive (figura 2.13).
Costruire un atlante basandosi su un singolo reference è un approccio
che ha diversi limiti. In primo luogo, la singola immagine selezionata potrebbe non essere un esempio tipico. Secondariamente, un solo esempio non
32
(a)
(b)
(c)
(d)
Figura 2.13: Esempio di approccio basato su atlanti. (a) Atlante. (b) Registrazione dell’atlante con una trasformazione globale. (c) Rifinitura locale
della registrazione. (d) Risultato finale dopo l’espansione del contorno con
un algoritmo di tipo snake.
può contenere alcuna informazione sulla variabilità della struttura da segmentare, e non può quindi permettere alcuna valutazione sulla bontà della
deformazione.
Per risolvere questi problemi nelle tecniche Multi-Atlante si prendono in
considerazione diverse immagini di reference, e relative label, al prezzo di
rendere necessaria una strategia di fusione delle segmentazioni ottenute a
valle della registrazione di ogni singolo atlante.
Il costo computazionale è decisamente più alto, e cresce con il crescere
33
del numero di atlanti considerati, ma la letteratura recente [61, 5] dimostra
la migliore accuratezza delle tecniche multi-atlante rispetto a quelle a singolo atlante; la disponibilità di processori multi-core a basso prezzo ne sta
facilitando l’applicazione anche in campo medico.
Gli errori prodotti dipendono in larga parte dalla differenza nella forma
e/o nell’apparenza tra l’atlante e l’immagine target e possono essere ridotti dalla selezione o costruzione di atlanti che siano il più rappresentativi
possibile della popolazione.
La selezione/costruzione degli atlanti può basarsi su [3, 66, 5]:
Utilizzo dell’intero training set, sfruttando tutta l’informazione dispo-
nibile. Il rischio è di privilegiare un determinato modo di variazione
della struttura di interesse se questo è più rappresentato dai dati a disposizione, a discapito della qualità dei risultati per le immagini che
presentino caratteristiche rare.
Selezione degli atlanti più rilevanti caso per caso secondo un criterio
di confronto con l’immagine target. In questo modo eventuali modi di
variazione prevalenti nel training set sarebbero scartati in gruppo se
non corrispondenti all’immagine. Scartare gli atlanti peggiori provoca
tuttavia una perdita di informazione, e nei casi in cui tutti gli atlanti
abbiano valori di somiglianza al target vicini tra loro può comportare
l’abbassamento qualitativo del risultato finale.
Sia FT l’immagine target da segmentare e A1 = (F1 , S1 ), ..., An = (Fn , Sn)
gli n atlanti disponibili. Con Fi e Si si indicano l’immagine e la segmentazione
ottenute deformando l’atlante i attraverso il metodo di registrazione scelto.
Ogni Si può contenere errori, dovuti fondamentalmente a problemi di
registrazione. Poichè gli errori prodotti da diversi atlanti non sono identici,
può essere necessaria una strategia di fusione delle segmentazioni che migliori
la qualità finale.
34
La maggior parte delle strategie esistenti per la fusione si basa sull’assegnamento di un peso alle label provenienti dai diversi atlanti, [66, 33]: ogni
atlante contribuisce alla soluzione secondo un peso non negativo.
Il metodo basato su ‘voto a maggioranza’ conta semplicemente per ogni
voxel i voti ricevuti da ogni label e sceglie quella che ne ha ricevuti il maggior
numero:
ŜT (x) = arg max l∈1...L
n
X
Sil (x)
i=1
con l indice della singola label, L numero totale delle label e x indice del
singolo voxel.
Sil (x) è il voto per la label l prodotto dal singolo atlante, definito come:
1, se S l (x) = l
i
Sil (x) =
0, altrimenti
La strategia di ‘voto a maggioranza’ assegna lo stesso peso ad ogni atlante, facendo la forte assunzione che ogni atlante produca una segmentazione
egualmente accurata.
Tuttavia, essendo un problema di ottimizzazione complesso, la registrazione deformabile risulta fortemente dipendente dall’immagine di input, e
atlanti diversi non produrranno la stessa qualità di registrazione e quindi di
segmentazione.
Per ovviare a questo problema, si può stimare la qualità della segmentazione basandosi sul confronto tra l’apparenza locale o globale dell’immagine
target e l’immagine registrata e assegnando peso maggiore alle segmentazioni
con lo score più alto secondo la metrica scelta.
ŜTl (x) =
n
X
wi (x)Sil (x)
i=1
dove wi (x) è il peso locale assegnato all’atlante iesimo , con
n
P
i=1
35
wi (x) = 1
Una possibile stima del peso si può basare sulla somiglianza locale dell’immagine. Utilizzando la SSD (‘sum of squared difference’) come misura di
somiglianza [3] i pesi possono essere stimati come:
wi (x) =
1 X
[
y ∈ N (x)(FT (y) − Fi (y))2 ]−β
Z(x)
dove N (x) definisce un intorno di x, Z(x) è una costante di normalizzazione e β è un parametro che modella la distribuzione dei pesi.
Un ulteriore sviluppo di questo tipo di metodologie, che non tratteremo,
individua un problema nell’assegnamento indipendente dei pesi ad ogni atlante, e tenta di risolverlo tenendo in considerazione una misura di correlazione
tra i diversi atlanti [83].
36
2.4
Metodi Implementati
Nel seguito di questa sezione saranno descritti i due metodi di segmentazione
implementati per lo sviluppo di questo progetto.
Il primo metodo, più semplice, è pensato per immagini TAC ed è stato
utilizzato con successo per generare modelli fisici di un ginocchio sano e di
un ginocchio patologico.
Il secondo metodo, più complesso e con maggiori potenzialità applicative,
è stato sviluppato come studio preliminare per valutare l’applicabilità del
framework della piattaforma software complessiva ad immagini RM, e ad
altri tessuti oltre a quello osseo.
2.4.1
Segmentazione di immagini TAC
Per la segmentazione di immagini TAC, con la volontà di estrarre la parte ossea, si è utilizzato un metodo semi-automatico in tre passi, basato
sull’approccio presentato in [43].
É possibile in immagini di questo tipo sfruttare l’informazione assoluta
dell’intensità di grigio, che corrisponde direttamente alla radiodensità (in
unità di Hounsfield) del corpo nel punto considerato .
Per questa ragione un approccio basato su sogliatura, o su region growing
guidato dall’intensità, appare sensato.
Un grande vantaggio di cui si è tenuto conto nella scelta implementativa
di questi metodi, è l’ottima velocità di esecuzione anche su volumi molto
grandi.
L’estrazione del contorno osseo può tuttavia non essere completa con
questi metodi, a causa delle variazioni di intensità dell’osso corticale dovute
al rumore, soprattutto nell’epifisi di femore e tibia dove lo strato di osso
corticale è più sottile. Si vuole inoltre estrarre una superficie piena.
Per risolvere questo problema si utilizzano operazioni morfologiche successive al primo stadio di segmentazione.
37
(a)
(b)
(c)
Figura 2.14: Segmentazione preliminare.
3D Region Growing
L’algoritmo utilizzato prevede i seguenti passi:
1. Selezione di una soglia.
2. Posizionamento manuale del seed sulla superifice dell’osso di interesse.
3. Crescita della regione all’interno della slice di posizionamento del seed,
tramite sogliatura degli 8-connessi.
4. Inizializzazione della slice successiva, tramite sogliatura dei pixel adiacenti alla segmentazione precedente.
5. Ripetizione dei punti 2 e 3 fino al completamento della segmentazione
di tutte le slice.
L’algoritmo cosı̀ implementato, forte della disponibilità di un’implementazione in GPU, permette il rapido ottenimento della segmentazione preliminare (vedi figura 2.14).
Operazioni Morfologiche
Per correggere errori dovuti a disomogeneità nel contorno osseo e per ottenere contemporaneamente una segmentazione piena, si effettuano i seguenti
38
(a)
(b)
(c)
Figura 2.15: Segmentazione a valle delle operazioni morfologiche.
passaggi, corrispondenti a una chiusura morfologica con un passo intermedio
di riempimento:
Dilatazione morfologica (primo passo della chiusura morfologica) con
elemento strutturale sferico, che tende a chiudere le piccole imperfezioni
del contorno.
Hole Filling bidimensionale (passo intermedio aggiunto), che sfrutta i
contorni chiusi dal passaggio precedente per riempire interamente le
singola slice della segmentazione.
Erosione morfologica (secondo ed ultimo passo della chiusura morfologi-
ca) con elemento strutturale sferico, che riporta alle dimensioni originali
la superifice esterna rimasta (vedi figura 2.15).
Viene reso possibile inoltre una versione di questo algoritmo che sostituisce al region growing una sogliatura assoluta su tutta l’immagine.
Questa sostituzione può essere utile per velocizzare le operazioni nel caso
di segmentazione di numerosi segmenti ossei contemporaneamente, o in quei
casi (e.g. ossa fratturate) in cui siano presenti frammenti ossei disconnessi.
39
Il problema della sovrasegmentazione, in assenza di artefatti, è evitato
visto che le ossa sono gli elementi con valore in unità di Hounsfield più alto.
Per i risultati di questo approccio si rimanda al capitolo 4.
2.4.2
Segmentazione di immagini RM
Per la segmentazione delle ossa dell’articolazione del ginocchio si è utlizzato un approccio multi-atlante simile a quello descritto in [71], per i buoni
risultati nel Grand Challenge SKI10[34] e per la versatilità di applicazione
dei metodi multi-atlante nella segmentazione di aree anatomiche diverse, in
ottica di sviluppi futuri del metodo.
Si descrive nel seguito il metodo utilizzato per ottenere la segmentazione.
Chiamata I l’immagine considerata, l’algoritmo prevede l’assegnazione
ad ogni voxel x ∈ I alla label con la massima probabilità a posteriori in x.
Le tre label considerate sono:
Osso Femorale: FB (femural bone).
Osso Tibiale: TB (tibial bone).
Sfondo: BG (background).
Calcolo della probabilità a posteriori
Si sfrutta il teorema di Bayes per calcolare le probabilità a posteriori, per cui
si possono esprimere come:
p(F B|x) = p(x|F B)p(F B)/p(x)
p(T B|x) = p(x|T B)p(T B)/p(x)
p(BG|x) = p(x|BG)p(BG)/p(x)
dove p(x) è constante e unitaria, e viene trascurata nel seguito.
40
Figura 2.16: Immagine originale.
Calcolo della likelihood
I termini di likelihood p(x|F B) e p(x|T B) sono calcolati dall’intensità dell’immagine da segmentare normalizzata Inorm . Si assume un modello molto
semplice, partendo dall’osservazione che le ossa sono ipointense nelle immagini utilizzate (RM T1 con sequenza SPGR). Con questa assunzione si prevede
che:
p(x|Osso) = p(x|F B) = p(x|T B) = exp−α(1+Inorm (x))
p(x|BG) = 1 − p(x|Osso)
dove α è un parametro di modello definito a priori (per la selezione del
parametro si veda il capitolo 4).
Calcolo della probabilità a priori
I termini di probabilità a priori p(F B) e p(T B) sono calcolati attraverso un
approccio multi-atlante.
Definiti:
I: immagine su cui effettuare la segmentazione.
41
Figura 2.17: Immagine della Likelihood basata sull’intensità.
A = Ai . . . AN , N Atlanti disponibili.
FB
SiF B . . . SN
: N segmentazioni del femore degli atlanti.
TB
: N segmentazioni della tibia degli atlanti.
SiT B . . . SN
BG
: N segmentazioni del background degli atlanti.
SiBG . . . SN
Tirigida : trasformazione data dalla registrazione rigida dell’atlante iesimo
su I basata su Mutua Informazione.
Tiaf f ine : trasformazione data dalla registrazione affine dell’atlante iesimo
su I basata su Mutua Informazione.
TiBSpline : trasformazione data dalla registrazione libera basata su BSpli-
ne dell’atlante iesimo su I basata su Mutua Informazione.
La propagazione S F B di una singola segmentazione binaria dell’atlante
iesimo sull’immagine target è ottenibile applicando a questa le trasformazioni
ottenute dai processi di registrazione rigida, affine e libera in sequenza:
S F B = TiBSpline ◦ Tiaf f ine ◦ Tirigida ◦ SiF B
42
Figura 2.18: Probabilità a priori basata sulla registrazione di atlanti.
S T B = TiBSpline ◦ Tiaf f ine ◦ Tirigida ◦ SiT B
S BG = TiBSpline ◦ Tiaf f ine ◦ Tirigida ◦ SiBG
La probabilità a priori è calcolata come la media delle segmentazioni
binarie cosı̀ calcolate per tutti gli N atlanti:
N
1 X BSpline
af f ine
FB
T
◦ Ti
◦ Si
p(F B) =
N i=1 i
N
1 X BSpline
af f ine
TB
p(T B) =
T
◦ Ti
◦ Si
N i=1 i
N
1 X BSpline
af f ine
BG
p(BG) =
T
◦ Ti
◦ Si
N i=1 i
Segmentazione risultante
La segmentazione S risultante dalla suddivisione di I nelle tre classi sarà
data da:
S(x) = arg max l∈{F B,T B,BG} p(l|x)
43
.
Figura 2.19: Segmentazione risultante.
Limiti e potenzialità
Questo approccio produce risultati accettabili per la segmentazione della parte ossea, ma sono prevedibili risultati non ottimali per l’applicazione diretta
a zone con maggior variabilità, o più difficilmente distinguibili nell’immagine
basandosi sull’intensità.
Le maggiori semplificazioni individuabili nell’approccio descritto in questa sezione sono relative al calcolo della likelihood, modellata semplicemente
sull’intensità, e alla strategia di fusione della label nel calcolo della probabilità
a priori, semplicemente una media delle label binarie.
In [71] la focalizzazione è posta sull’ampliamento di questa tecnica alla
segmentazione della cartilagine, problema di più difficile risoluzione.
Dopo aver segmentato la parte ossea, la Likelihood della cartilagine viene
calcolata attraverso un classificatore kNN che tiene in considerazione, oltre
all’intensità, derivate prime e seconde dell’immagine campionate in tre direzioni su tre diverse scale, in modo simile a quanto fatto in [26]. Il numero di
44
voti per ogni classe diviso il numero di neighbour considerati è la Likelihood
cercata.
La strategia di fusione delle label prevede in questo caso un secondo raffinamento della registrazione (separatamente per femore e tibia) e pesa localmente il contributo di ogni atlante scegliendo di favorire quelli che sono
in maggior accordo con la likelihood.
Il peso λi è definito come:
λclasse
(x) =
i
1
α |Ti ◦ Si − p(x|classe)| + Con α e parametri liberi del modello.
In generale, per strutture anatomiche diverse, è possibile prevedere migliori risultati andando a modificare caso per caso calcolo della likelihood,
basandosi su assunzioni appropriate per la struttura considerata, e strategia
di fusione, a seconda del tipo di atlante a cui si fa riferimento.
Per strutture anatomiche molto variabili, globalmente o localmente, inoltre, occorrerà prevedere un tuning corretto dei parametri della registrazione
deformabile (vedi sezione 2.2.2).
45
Capitolo 3
Fruizione del Dato
Il grande sviluppo delle tecnologie dell’imaging medicale nell’ultimo decennio
ha permesso di ottenere l’accesso a dati sempre più complessi.
Il passaggio dalla proiezione bidimensionale su lastra, all’informazione
completa volumetrica ha portato enormi vantaggi alla medicina moderna,
aprendo nuove strade nella comprensione di patologie complesse.
Un problema non banale è come permettere al medico di avere accesso in
modo veloce ed intuitivo a queste informazioni: una rappresentazione multiplanare del volume è il mezzo più impiegato, ma non raggiunge l’intuitività
di una visualizzazione tridimensionale.
Un altro problema che è stato considerato nello sviluppo di questo progetto è la necessità del chirurgo di poter accedere alle immagini mediche in
sala operatoria durante l’operazione, ovvero in ambiente sterile e con guanti
chirurgici. Per l’utilizzo di un terminale in queste condizioni potrebbe essere
appropriato un sistema di controllo che non preveda contatto fisico, basato
su sensori in grado di rilevare movimento a distanza.
La visualizzazione 3D di una struttura anatomica d’interesse è una possibiltà che, per quanto tecnologicamente disponibile da molti anni, si sta
radicando solo recentemente nella pratica clinica in radiologia e chirurgia.
46
Figura 3.1: Le tre fasi necessarie per la produzione di un modello 3D ad uso
medico.
La comprensione della morfologia della struttra reale è resa molto più
intuitiva attraverso questo tecniche, ma non può essere fornita alcuna informazione tattile, nè permettere una reale simulazione di posizionamento
di impianti prostetici necessari in chirurgia, se non in sistemi informatici
complessi e di difficile apprendimento e utilizzo per il personale medico.
Anche per l’analisi dimensionale si deve ricorrere al software, con misurazioni bidimensionali applicate spesso alla visualizzazione multi-planare, dalle
quali non è sempre immediato stimare le reali dimensioni accuratamente.
Per risolvere questi problemi, l’idea di utilizzare le tecnologie di stampa
3D per fornire al medico un modello su cui testare interventi complessi non
è futuristica, come dimostrato da diversi studi a riguardo [40], [22], in cui
si segnala, tra i diversi vantaggi già elencati, un tempo di chirurgia ridotto
nella maggior parte dei casi di una media fino a 63 minuti, con conseguente
riduzione dei costi totali nonostante il contributo aggiuntivo necessario per
la stampa del modello 3D.
47
Nel seguito di questo capitolo saranno presentate:
Le tecniche di visualizzazione tridimensionale più comuni e quella im-
plementata.
Le possibilità di interazione con il modello 3D implementate.
Le tecnologie disponibili nel campo della stampa 3D e le applicazioni
note al campo medicale.
Le stampanti e i materiali utilizzati per realizzare i prototipi fisici nel
corso di questo progetto.
48
3.1
Dall’Immagine alla Visualizzazione 3D
Ottenere una visualizzazione tridimensionale da dati volumetrici è un problema risolvibile con soluzioni diverse, e a volte complementari. Sono presentate nel seguito le due strategie più utilizzate nei sistemi PACS/CAD in
commercio.
Figura 3.2: Nella fase di visualizzazione, la segmentazione è convertita in una
mesh tridimensionale.
3.1.1
Volume Rendering
Le tecniche di Volume Rendering permettono di visualizzare su un dispositivo bidimensionale un campo scalare a tre dimensioni, senza passare per la
segmentazione della struttura di interesse.
Questa rappresentazione è assimilabile a quella che si ottiene su una lastra
radiografica.
49
Ogni pixel dell’immagine rappresenta sulla lastra radiografica non tanto
l’intensità luminosa di un punto (come nel caso della comune fotografia) ma
la “storia” dei punti che una radiazione ha attraversato dalla sorgente di
raggi X alla lastra, cioè la somma delle densità dei punti attraversati.
Nel Volume Rendering ogni punto del volume concorre alla costruzione
dell’immagine.
In questo caso nel sistema di visualizzazione tridimensionale:
Si considerano tutti i punti del corpo.
Ogni pixel dell’immagine deve ricevere il contributo di tutti i punti che
un certo raggio visivo ha attraversato, come nel caso della radiografia.
Ogni voxel mantiene la sua informazione “quantizzata”.
Figura 3.3: Volume Rendering di una TAC al ginocchio, da (a) a (c) sono
scartati voxel con intensità via via crescenti.
Per quanto non necessaria nel Volume Rendering una segmentazione preliminare può essere comunque vantaggiosa (vedi Figura 3.3).
Questo passo ha lo scopo di scartare alcuni punti, non interessanti secondo
il criterio decisionale scelto, prima della costruzione dell’immagine. Tolti i
voxel di cui si rifiuta il contributo per la produzione dell’immagine finale,
tutti gli altri sono presi conservando il loro valore di intensità.
50
Le due principali tecniche per ottenere un Volume Rendering sono Splatting e Ray Casting.
Splatting Nello Splatting (Figura 3.4) ogni voxel dell’immagine viene proiettato sul piano di proiezione.
Voxel vicini al piano immagine produrranno una proiezione estesa su più
pixel nel piano immagine, mentre voxel lontani saranno rappresentati nei casi
limite da una frazione del singolo pixel.
Figura 3.4: Schema della tecnica di Splatting.
L’impronta del voxel sull’immagine prende il nome di “splat”, ed è rappresentabile come un disco non uniforme le cui proprietà (colore e opacità)
variano con distribuzione gaussiana.
Tutti gli ‘splat’ prodotti dai voxel del volume vengono sommati insieme
per ottenere l’immagine finale.
Questa tecnica risulta molto efficiente, grazie alla semplice parallelizzabilità data dall’indipendenza di ogni punto dagli altri.
Lo svantaggio principale dello Splatting è la perdita di qualità a causa dei
voxel vicini al piano immagine che producono grandi figure di diffrazione.
Ray Casting Il Ray Casting (Figura 3.5) è una tecnica che permette di avere dei risultati migliori qualitativamente, ma che risulta computazionalmente
più costosa.
51
Figura 3.5: Schema della tecnica di Ray Casting.
In questa tecnica ad ogni pixel sul piano immagine è fatta corrispondere
una direzione nello spazio (la congiungente del pixel al punto di vista). Seguendo questa direzione si campionano i voxel incontrati (interpolandone il
valore per valori fuori dalla girglia immagine).
La luminosità finale del pixel sarà una composizione, ovvero una funzione
non lineare, dell’intensità di tutti i voxel cosı̀ incontrati dal raggio.
3.1.2
Surface Rendering
Per descrivere più chiaramente la tecnica del Surface Rendering, si può
innanzitutto scendere di una dimensione, partendo dal caso di immagine
bidimensionale.
Un’immagine bidimensionale è tipicamente una rappresentazione di una
certa quantità p sul piano di proiezione, la cui natura è determinata dal
sistema di acquisizione.
Ciascun pixel dell’immagine è esprimibile mediante la funzione
f (xi , yi ) = pi
Risulta possibile ottenere una rappresentazione parametrica dell’immagine tramite la tecnica di ‘Line Rendering’, la cui generalizzazione in tre
dimensioni porta alla definizione di ‘Surface Rendering’.
52
Nel primo caso si prenda la funzione f e si prendano tutti i punti corrispondenti ad una certa p. Essi formeranno una curva di livello, o isoipsa,
non necessariamente chiusa.
L’estrazione dell’isoipsa è fondamentalmente un passaggio di segmentazione. Invece di descriverla come una lista di punti che la costituiscono, la
si può linearizzare a tratti rappresentandola in memoria come un’unione di
spezzate, il numero delle quali renderà la curva più o meno “dolce” (smooth).
Si può ripetere questo procedimento per vari livelli di p ottenendo un certo
insieme di “spezzate” che approssimano le varie isoipse (vedi figura 3.6).
Per visualizzare l’immagine è possibile quindi mostrare non f (x, y), ma
solo l’insieme delle spezzate.
Un vantaggio della rappresentazione dell’immagine tramite segmenti è
la possibilità di ingrandirla e ruotarla senza effetti di rumore dovuti all’interpolazione, con trasformazioni vettoriali invece di costose operazioni sui
pixel.
Figura 3.6: Esempio di Line Rendering.
Per contro:
L’immagine ricostruita perde informazioni rispetto all’immagine di par-
tenza. Sia per l’approssimazione dei contorni in spezzate, sia per la
perdita dell’informazione di intensità dovuta alla natura binaria della
segmentazione.
53
L’immagine originale deve restare in memoria se si vuole modificare la
segmentazione. In questi casi c’è la necessita di mantenere in memoria
sia l’immagine originale sia la rappresentazione della segmentazione.
Il risultato è legato alla bontà della segmentazione effettuata.
Uscendo dall’analogia bidimensionale, nel caso di un dataset volumetrico
si considera un campo scalare, in cui il valore in ogni voxel dipende da una
certa proprietà dell’oggetto in quel punto dello spazio fisico, specifica per il
sistema di imaging utilizzato.
Il fatto di avere una terza dimensione cambia le cose riguardo alla visualizzazione, ma l’algoritmo rimane concettualmente lo stesso ed è facilmente
generalizzabile.
Un tipico algoritmo di Surface Rendering prevede i seguenti passi:
Segmentazione.
Ricostruzione della superficie esterna.
Visualizzazione.
Durante il passaggio di segmentazione una funziona binaria determina
l’appartenenza o meno alla superficie da visualizzare di ogni voxel.
Per la ricostruzione delle superfici, la forma di rappresentazione più usata
è quella poligonale. I triangoli sono i poligoni più utilizzati perchè rendono
possibile la definizione locale della superficie in modo efficiente e compatto.
Un metodo banale per la costruzione della rappresentazione a partire da
un insieme di punti è collegarli insieme a tre a tre, tramite triangolazione,
formando triangoli non sovrapposti. Diverse scelte sono applicabili, la più
utilizzata è la tecnica di triangolazione di Dealunay[50], che massimizza il
minimo angolo dei triangoli generati.
Questo metodo funziona presenta spesso un’eccessiva angolosità della superficie risultante, per ovviare a questo problema si può sfruttare una tecnica
chiamata “Marching Cubes”[59].
54
Senza entrare nel dettaglio, l’algoritmo prevede di non far passare i triangoli generati direttamente per i punti della isosuperficie, ma per punti intermedi tra i voxel della isosuperficie e quelli ad essi immediatamente confinanti.
Figura 3.7: Le quindici configurazioni previste dall’algoritmo Marching
Cubes.
Più precisamente, la scelta di posizionamento dipende:
Dalla conformazione locale della segmentazione: se si prendono gli otto
voxel che definiscono un cubo nello spazio e si assegna ad ognuno di
essi un valore binario che ne indica l’appartenenza o meno alla superficie, si ottengono 256 possibili configurazioni. Per ognuna di queste si
definiscono uno o più triangoli interpolanti. Per motivi di simmetria il
numero totale di configurazioni possibili scende a 15, come mostrato in
fiugra 3.7.
Dal valore del campo scalare nei voxel in casi non discreti. Integrando
la segmentazione con l’informazione locale dei voxel dell’immagine è
possibile determinare in ogni punto la distanza a cui far passare la
superficie interpolante a seconda del valore di intensità del punto stesso.
Se il numero di triangoli cosı̀ generati risulta troppo alto si provvede ad
un ulteriore passo di decimazione. La decimazione è un processo inteso a
semplificare la mesh tramite riduzione del numero di triangoli che la costituiscono, conservando però nei limiti della perdita d’informazione l’aspetto
della stessa .
55
Dopo questa operazione è possibile scartare dalla memoria l’immagine volumetrica di partenza e memorizzare soltanto la rappresentazione triangolare
della superficie del volume di interesse.
3.1.3
Metodo Implementato
In questo progetto la scelta ovvia per visualizzare e gestire il dato tridimensionale è ricaduta sull’applicazione di un algoritmo di Surface Rendering basato
su Marching Cubes, sfruttando le libreria C++ ITK e VTK (vedi appendice
A).
La necessità di ottenere una superficie triangolare chiusa per la preparazione del dato alla stampa ben si sposa con l’output di tale tecnica, al
contrario di quanto restituito da tecniche di Volume Rendering.
Figura 3.8: Confrontro tra il dato grezzo ottenuto tramite Marching Cubes, a sinistra, e dato raffinato dopo l’applicazione dei filtri previsti nella
piattaforma software sviluppata.
Il dato grezzo ottenuto tramite Marching Cubes non è tuttavia soddisfacente a livello visivo, a causa della natura discreta del dato in ingresso. E’
necessario prevedere un processo di smussamento (‘smoothing’) della mesh
cosı̀ ottenuta per ottenere un risultato migliore (vedi figura 3.1.3).
Si desidera inoltre una superficie chiusa: per ottenerla si effettua una
triangolazione dei punti sui bordi superiori e inferiori dell’immagine.
56
Uno step conclusivo prevede un’operazione di sdoppiamento (‘splitting’)
delle normali nei punti di forte angolosità (tipicamente i bordi) per ottenere
un risultato visivo migliore.
La pipeline completa di elaborazione del dato è dunque la seguente:
Applicazione dell’algoritmo di Marching Cubes sul dato discreto in
uscita dalla Segmentazione.
Decimazione della mesh (dove necessario per necessità computazionali).
Smoothing basato su kernel Sinc / Smoothing Laplaciano.
Riempimento delle regioni connesse ai bordi dell’immagine.
Splitting delle normali.
In figura 3.9 è mostrata l’interfaccia complessiva della piattaforma software sviluppata.
Figura 3.9: Vista dell’interfaccia della piattaforma sviluppata, la segmentazione è visualizzata nella parte sinistra della schermata sovrapposta all’immagine originale, il risultato del surface rendering è mostrato nella parte
destra della schermata, dove l’utente può interagire con il modello 3D.
57
3.1.4
Funzionalità implementate
All’interno della piattaforma software sviluppata viene data la possibilità di
interagire con il modello tridimensionale in diversi modi, oltre alle ovvie possibilità di rotazione, traslazione e ingrandimento della scena tridimensionale.
Collegamento con la visualizzazione 2D
Se necessario, è possibile ottenere una visualizzazione intuitiva della corrispondenza tra scena tridimensionale e slice visualizzata(vedi figura 3.10).
Figura 3.10: L’altezza della slice visualizzata è individuata a destra sul
modello 3D dal piano rosso.
Utilizzando questa funzionalità, un piano rosso si posiziona sulla scena
all’altezza della slice visualizzata.
Alla pressione del tasto sinistro del mouse sul modello 3D, tenendo premuto il tasto ‘ctrl’, nella schermata di visualizzazione bidimensionale si aggiorna
automaticamente la slice e viene segnalato con un indicatore verde il punto
selezionato.
Costruzione di ponti fisici
Nell’ottica di permettere la stampa 3D della scena descritta si rende necessario collegare fisicamente le strutture sospese. Nel caso della segmentazione
58
delle ossa del ginocchio, conservare le distanze tra femore, tibia e rotula è
fondamentale per l’utilizzo del modello fisico.
Per permettere questa operazione, nel software sviluppato si rende possibile il posizionamento di ponti fisici tra le diverse strutture (vedi figura
3.1.4).
Dopo aver creato il collegamento selezionando iterativamente il primo e il
secondo punto di connessione, è possibile muoverne le estremità lungo tutta
la superficie ed ingrandirne o diminuirne a piacimento le dimensioni.
Rimozione di componenti isolate
Alla creazione o all’importazione (in formato MHD o STL) di un modello tridimensionale, viene eseguita sulla scena un’analisi delle componenti
connesse.
Ogni componente cosı̀ trovata è trattata indipendentemente, e può essere
rimossa singolarmente dalla scena.
Esportazione in formato STL
Funzionalità fondamentale della piattaforma, è la possibilità di esportare
il modello 3D visualizzato in formato STL, il tipo di dato utilizzato dalla
maggior parte delle stampanti 3D.
59
In questo formato, la mesh è descritta come elenco di triangoli, rappresentati ognuno da:
La normale alla superficie ni , nj , nk .
I tre vertici: (v1x , v1y , v1z ), (v2x , v2y , v2z ), (v3x , v3y , v3z )
I modelli derivanti dal Surface Rendering sono già convenientemente salvati in memoria in una rappresentazione basata su triangoli, rendendone
immediata l’esportazione; per i modelli aggiunti successivamente alla scena
(e.g. i ponti fisici) è necessario invece un passaggio di conversione tramite
triangolazione, precedente al salvataggio.
Viene inoltre predisposta prima del salvataggio un’operazione di filtraggio
aggiuntiva che permette la pulizia della mesh eliminando eventuali punti non
appartenenti a nessun triangolo, o triangoli degeneri con punti coincidenti.
3.1.5
Fruizione intra-operatoria delle immagini e del
modello
.
Un problema comune nella realtà ospedaliera è la possibilità di accedere
alle immagini mediche, indipendentmente dal fatto che queste siano rappresentate tramite visualizzazione bidimensionale, multiplanare o tridimensionale tramite una delle tecniche di rendering discusse precedentemente,
all’interno della sala operatoria.
In queste condizioni il chiurgo deve mantenere la sterilità e non può accedere facilmente a un terminale tramite strumenti fisici (tipicamente mouse
e tastiera).
Per aggirare questo problema senza il ricorso a una seconda persona che
utilizzi il terminale esternamente alla sala operatoria, si può fare ricorso alle
recenti tecnologie di interazione ‘touchless’, basate sul riconoscimento dei
movimenti dell’utente.
60
Sono possibili diverse soluzioni, che vanno dal tracciamento ottico tramite
telecamera, a sensori più avanzati basati su sensori che sfruttano diverse
tecnologie.
Sono presenti diversi dispositivi commerciali (e.g. Microsoft Kinect©)
in grado di rilevare la posizione e l’orientamento del corpo umano o di sue
parti.
Figura 3.11: La periferica Leap Motion©.
Nel perseguire questo obiettivo in questo progetto si è utilizzato la periferica USB “Leap Motion©” (vedi figura 3.11), che permette il tracking della
posizione delle mani e delle dita dell’utente, con una precisione promessa di
circa 0,01 millimetri.
L’interesse verso questa piattaforma è particolarmente incentivato dalle ridottissime dimensioni, tanto che viene attualmente integrata in alcuni
modelli di laptop HP, e dal basso costo (intorno agli 80$).
Leap Motion© traccia i movimenti nel suo campo di vista, fornendo set
di dati, o ‘frame’ al servizio in esecuzione in background, estraibili attraverso
le librerie fornite.
Ogni frame contiene liste di tutte le proprietà tracciabili dalla piattaforma, che è in particolare in grado di fornire informazioni su posizione, movimento, e caratteristiche diverse di mani, dita e oggetti dalla forma particolare
nella scena.
Un ristretto set di gesti viene automaticamente rilevato dalla piattaforma,
lasciando allo sviluppatore la possibilità di implementarne di nuovi.
61
Le API C++ disponibili sono state sfruttate per rendere possibile l’interazione con il software sviluppato tramite diversi gesti appositamente implementati.
Visualizzazione tridimensionale:
Un singolo dito disteso: rotazione della scena 3D nella direzione del
movimento.
Tre dita distese: “zoom in” se in movimento verso l’alto/”zoom out”
se verso il basso.
Visualizzazione bidimensionale:
Un singolo dito disteso: scorrimento lento delle slice del volume carica-
to seguendo il movimento orizzontale del dito (variazione positiva per
movimento da sinistra verso destra).
Tre dita distese: scorrimento veloce delle slice del volume caricato
seguendo il movimento orizzontale del dito (variazione positiva per
movimento da sinistra verso destra).
Un controllo sulla velocità del gesto in esecuzione e sulla posizione rispetto
al sensore permette di evitare interferenze dovute, ad esempio, al rapido
passaggio di una mano sul campo di azione del sensore o al ritrarre il braccio
a gesto completato.
Anche il numero di dita presenti nella scena (e la loro posizione) è sottoposto ad alcuni controlli che permettono di rilassare le condizioni di riconoscimento del corretto gesto previsto per l’interazione con il software, assicurando un’esperienza d’uso più naturale e meno soggetta ad imprecisioni (sia
del sensore sia dell’utilizzatore).
62
3.2
Dalla Visualizzazione alla Stampa
Per ottenere un modello fisico dalla mesh tridimensionale prodotta con le
strategie precedentemente descritte si possono utilizzare diverse tecnologie,
raggruppabili sotto la classe dei sistemi di prototipazione rapida (‘Rapid
Prototyping’).
Sono presentate nel seguito le tecniche più sviluppate in questo campo, e
le possibili applicazioni mediche delle stesse.
Figura 3.12: Nella fase di stampa la mesh tridimensionale viene utilizzata
per produrre un modello fisico della struttura d’interesse.
63
3.2.1
Sistemi di Rapid Prototyping
La Prototipazione Rapida rende possibile la produzione, in poche ore e senza l’ausilio di utensili, di oggetti di geometria complessa, direttamente dal
modello matematico realizzato su sistemi CAD1 tridimensionali.
Sotto la definizione di Prototipazione Rapida si includono tecnologie diverse, ognuna con le proprie limitazioni e applicazioni particolari, accomunate
dalla natura additiva del processo di produzione.
Nelle tecniche additive, la macchina legge i dati ed effettua un’operazione
denominata ‘slicing’.
Lo slicing prevede il sezionamento del modello con piani perpendicolari all’asse z e la generazione del codice macchina necessario a produrre i
movimenti necessari per la stampa.
La costruzione del modello avviene strato per strato, seguendo le linee di
contorno delle superifici sezionate.
Il vantaggio fondamentale delle tecniche additive è la possibilità teorica di
creare modelli con ogni tipo di forma e cavità interna, in tempi relativamente
brevi (sempre nell’ordine di grandezza delle ore).
Il tempo di costruzione del modello dipende dalla tecnologia particolare
impiegata, dalla dimensione e dalla forma della struttura considerata.
I sistemi più recenti hanno permesso di ottenere tempi compatibli con la
pratica clinica, favorendone l’introduzione negli ospedali [65].
Il sistema utilizzato per la deposizione degli strati è diverso per ogni
tecnologia considerata.
Il processo di Stereolitografia (SLA) utilizza resine fotosensibili polime-
rizzarbili tramite l’esposizione ad un laser ultravioletto, tipicamente a
Elio-Cadmio o Argon (tecnologia sviluppata da 3D Systems).
Nei sistemi tradizionali una piattaforma è immersa nel liquido fotosensibile che viene selettivamente fatto solidificare in alcune zone tramite
l’esposizione al laser.
1
CAD:Computer Assisted Design
64
L’abbassamento progressivo della piattaforma permette una nuova copertura del liquido della struttura e la formazione slice per slice dell’oggetto (figura 3.13.
Figura 3.13: Stereolitografia: schema di funzionamento.
Il processo di Selective Laser Sintering (SLS) si basa su piccole particelle
di materiali termoplastici, metalli, ceramiche o polveri vetrose, deposte
uniformemente su una piattaforma e sinterizzate (ovvero compattate
in un composto indivisibile, ma non fuse) con laser ad alta potenza,
tipicamente a CO2 (tecnologia sviluppata da EOS GmbH).
Tra i materiali utilizzabili sono inclusi polimeri come il nylon e il polistirene, e metalli come l’acciaio, le leghe del bronzo e il titanio (in
questo caso si parla di Metal Laser Sintering).
Dopo la lavorazione di ogni sezione, la piattaforma si abbassa e un rullo
distribuisce un nuovo strato di materiale. Il processo si ripete fino al
completamento dell’oggetto finale. (figura 3.14)
Il processo di Laminated Object Manufacturing (LOM) utilizza strati
continui di carta o film plastici, ricoperti da un adesivo sensibile al
calore.
65
Figura 3.14: Selective Laser Sintering: schema di funzionamento.
La parte di strato sul piano di lavoro viene sagomato da un laser ad
alta potenza (tipicamente a CO2 ) (tecnologia sviluppata da Helysis,
ora acquisita da Cubic Technologies).
Dopo la lavorazione di una singola slice, la parte sagomata viene abbassata e lo strato è fatto scorrere da un sistema di rulli. L’aderenza
alla slice precedente del nuovo materiale presente sul piano di lavoro è
garantita dal passaggio di un rullo caldo che attiva l’adesivo.
Il processo di Fused Deposition Modeling (FDM) sfrutta l’estrusione di
gocce di materiali termoplastici (e.g. ABS, PLA, poliammidi) da un
ugello mobile riscaldato (figura 3.15).
Il materiale nell’ugello è mantenuto a una temperatura poco superiore
al suo punto di fusione in modo da permettere una rapida solidificazione sullo strato sottostante dopo l’estrusione (tecnologia sviluppata da Stratasys Inc.).I sistemi più recenti includono un secondo ugello che posiziona materiale di supporto, rimosso in una seconda fase,
meccanicamente o, se solubile, tramite lavaggio.
66
Figura 3.15: Fused Deposition Modeling: schema di funzionamento.
Le tecnologie di Inkjet Printing (IJP, e talvolta 3D Printing, 3DP) si
basano su diversi tipi di polveri fini simil-gesso (tecnologia sviluppata
dal MIT e licenziata a Z-Corp., ora acquisita da 3D Systems).
In modo simile al caso del SLS la polvere viene distribuita sul piano di
lavoro da un rullo, ma il sistema di fissaggio perevede la deposizione
di un adesivo liquido da una testina di stampa al posto della fusione
tramite laser (figura 3.16).
I materiali sono limitati ma economici se comparati alle altre tecnologie.
La variante ColorJet Printing (CJP) prevede l’utilizzo combinato di
adesivi liquidi di tre colori diversi per la produzione di modelli colorati.
Alcune tecniche di fabbricazione richiedono due materiali nella fase di
costruzione. Il primo è quello che va a comporre il modello tridimensionale,
mentre il secondo è il materiale di supporto necessario per tutte le parti
sospese, e viene rimosso tramite fusione o dissoluzione in un solvente.
67
Figura 3.16: Inkjet Printing: schema di funzionamento.
Questo passaggio non è richiesto in quelle tecniche dove un letto di polvere
fornisce il supporto necessario come nelle tecniche di SLS e Inkjet printing.
A seconda della tecnica di fabbricazione può essere possibile combinare
diversi materiali in un solo modello, o di colorare automaticamente la superficie, con ovvi vantaggi nella produzione di prototipi più realistici per scopi
di ricerca o di didattica.
3.2.2
Rapid Prototyping in campo medico
L’evoluzione delle tecniche di Rapid Prototyping in quanto ad abbassamento
di tempi e costi, maggiore semplicità di utilizzo e miglioramento della qualità
finale, ne hanno permesso l’applicabilità al campo medico.
Le possibilità di impiego sono numerose: saranno presentate nel seguito
le più note in letteratura divise per categoria.
Pianificazione chirurgica La prototipazione rapida può essere utile in
chirurgia come strumento per analizzare l’anatomia anomala migliorando e
68
facilitando la fase diagnostica e preparatoria.
Diversi studi ne dimostrano l’applicabilità e l’efficacia nella chirugia craniofacciale e maxillofacciale [82].
Figura 3.17: Stampa 3D dell’aorta di un paziente con aneurisma.
Studi preliminari nella chirurgia pelvica [32, 37], in neurochirurgia [86,
46] e in chirurgia cardiovascolare [45] e maxillofacciale [62, 82] hanno dimostrato miglioramenti significativi nella diagnosi e nel trattamento grazie alla migliore comprensione della struttra patologica e alla possibilità di
pianificazione precedente all’intervento (figura 3.17).
Simulare i passaggi dell’operazione [46] utilizzando modelli fisici può aiutare a prevedere complicazioni intra-operatorie.
La stampa pre-operatoria di fratture complesse, con conseguente possibilità di decidere in fase preliminare le modalità di intervento, ad esempio
marcando fisicamente sul modello 3D i punti di inserimento delle viti di sostegno da impiantare nel paziente, ha mostrato buoni risultati in studi recenti
[8].
Diversi studi nel campo della chirurgia spinale [40, 22], mostrano come
la riduzione del tempo di intervento sia significativa nei casi in cui vengano
69
utilizzati biomodelli, e che sovente siano scelte strategie chirurgiche diverse
da quelle standard grazie alle possibilità di studio pre-operatorio più approfondito. Un feedback molto positivo è ottenuto anche nel giudizio sulla
comunicazione con il medico dei pazienti, grazie a una migliore comprensione dell’intervento grazie all’utilizzo dei biomodelli nella fase di consenso
informato.
Figura 3.18: Visualizzazione e stampa 3D di frattura acetabolare.
La diminuzione delle tempistiche dell’operazione grazie a una fase di
studio più accurata porta diversi vantaggi[40]:
Minore perdita di sangue del paziente (e migliore follow-up dell’inter-
vento).
Risparmio nei dosaggi degli anestetici.
Ridotto impiego della sala operatoria.
Per queste ragioni l’impiego di queste tecnologie in fase di pianificazione
chirurgica è promettente anche da un punto di vista economico e gestionale,
oltre che da quello prettamente medico.
Prostetica La possibilità di creare impianti prostetici personalizzati permetterebbe di risolvere i problemi legati alle dimensioni standard delle attuali
protesi ossee.
70
In questo campo ci si possono aspettare vantaggi per pazienti al di fuori
dai range anatomici classici o con requisiti particolari dovuti alla patologia,
e in generale risultati migliori grazie alla corrispondenza più accurata tra
impianto e anatomia del paziente.
L’utilizzo della prototipazione rapida è stato sperimentato per la ricostruzione di diverse strutture anatomiche, specialmente nella chirurgia maxillofacciale e dentale [74, 52].
Figura 3.19: Valutazione della discrepanza mandibolare su modello fisico.
Diversi studi mostrano che anche la chirurgia ortopedica potrebbe trovare
grandi vantaggi nella produzione di impianti su misura [19, 41].
Dal punto di vista dei materiali, le bioceramiche, come l’idrossiapatite,
sono i materiali d’elezione per la ricostruzione di strutture ossee. Polimeri
bio-degradabili come il caprolattone sono sotto oggetto di studi per la sostituzione delle cartilageni . Metalli come il titanio sono attualmente necessari
per impieghi che prevedono la sottoposizione a forti stress meccanici (e.g.
protesi d’anca).
Ricerca ed insegnamento Nel campo della ricerca, tra gli attuali campi
d’applicazione del rapid prototyping spicca lo studio della fluidodinamica (Figura 3.20), effettuabile in modelli morfologicamente realistici per struttura e
consistenza grazie all’impiego di materiali elastici come siliconi e poliuretani.
Nel campo dell’istruzione, modelli tridimensionali realistici potrebbero
almeno parzialmente integrare l’utilizzo di cadaveri nella preparazione degli
specializzandi in chirurgia.
71
Figura 3.20: Studio del flusso di elio iperolarizzato in un modello realistico
di trachea.
In generale la possibilità di simulare interventi chirurgici e procedure specifiche per patologie complesse o rare, può migliorare la confidenza del chirurgo con il caso (altrimenti non studiabile in modo diretto) e di conseguenza
i risultati di interventi futuri.
72
3.3
Stampanti e Materiali utilizzati
La scelta di macchina e materiale per la realizzazione dei primi due modelli
fisici stampati nel corso di questo progetto è ricaduta su stampanti della
serie x60 di 3D Systems, che si basano su tecnologia Inkjet Printing (figura
3.21) e sfruttano una polvere composita (calcio solfato emi-idrato al 90%,
materiale più noto come Plaster, secondo l’MSDS2 disponibile[87]), chiamata
commercialmente VisiJet® PXL, e un legante chiamato commercialmente
zb®63, disponibile in tre colori. Sono inoltre disponibili tre infiltranti per
modificare le proprietà meccaniche del prodotto finito (vedi tabella 3.1).
Figura 3.21: La Stampante ProJet360 di 3D Systems.
Questa tecnologia, nello studio preliminare è risultata promettente per
diversi fattori:
Alta risoluzione verticale e possibilità di creare feature di piccole di-
mensioni.
Assenza di materiale di supporto e di scarto, sia durante che dopo
il processo di costruzione del modello (grazie al recupero automatico
2
MSDS: Material Safety Data Sheets
73
della polvere non utilizzata). Grande vantaggio per l’idea di integrare
in futuro una stampante di questo tipo in ambiente ospedaliero.
Possibilità di integrare colori diversi nello stesso modello utile per di-
stinguere diversi tessuti o evidenziare aree patologiche.
Alta velocità di stampa (fino a 23/mm ora) relativamente alle altre
tecnologie disponibili sul mercato.
A fronte di questi vantaggi un limite importante, da tenere in considerazione per le evoluzioni future del progetto, è la scarsa disponibilità di
materiali, fondamentalmente ridotti alla combinazione di un singolo materiale di base con tre diversi tipi di infiltrante per modificarne le proprietà
meccaniche.
Le proprietà del materiale dopo il trattamento con gli infiltranti disponibili sono riportate in tabella 3.1
Infiltrante (nome commerciale):
ColorBond
StrengthMax
SaltWater
Resistenza a trazione, MPa:
14.2
26.4
2.38
Elongazione alla rottura, %:
0.23
0.21
0.04
Modulo di elasticità, MPa:
9,450
12,560
12,855
Resistenza a flessione, MPa:
31.1
44.1
13.1
Modulo di flessione, MPa:
7,163
10,680
6,355
Tabella 3.1: Infiltranti disponibili per VisiJet PXL®: proprietà meccaniche
del materiale dopo il trattamento.
74
I secondi due modelli fisici stampati al termine di questo lavoro sono stati
prodotti utilizzando invece la stampante SLA-500 di 3D Systems, che sfrutta
la tecnologia di Stereolitografia. Il materiale utilizzato è una resina epossidica
chiamata commercialmente Accura Clearvue®.
Figura 3.22: La Stampante Sla500 di 3D Systems.
Per quanto questa tecnologia comporti costi decisamente maggiori, sia di
investimento iniziale, sia di manutenzione e materiali, il range di materiali
utilizzabili è molto più vasto rispetto a quanto reso disponibile con l’Inkjet
Printing, con grandi vantaggi potenziali, e in particolare:
Possibilità di impiego di materiali trasparenti.
Possibilità di stampare parti con proprietà diverse per diversi impieghi.
Possibilità di scegliere materiali con buona risposta alle tecniche di
sterilizzazione, per l’utilizzo in sala operatoria.
Possibilità di utilizzare materiali biocompatibili.
Proprietà potenzialmente vincenti in un’applicazione come quella considerata. Per valutazioni più dettagliate sui modelli realizzati si rimanda alla
sezione 4.3.
75
Capitolo 4
Valutazioni Sperimentali e
Risultati
Si presentano in questo capitolo le valutazioni sperimentali effettuate nel
corso di questo progetto, suddivise in tre sezioni:
Efficacia dell’algoritmo semi-automatico di segmentazione per imma-
gini TAC del ginocchio, e valutazione delle possibilità di raffinamento
manuale fornite dalla piattaforma software sviluppata.
Efficacia dell’algoritmo automatico di segmentazione per immagini RM
del ginocchio, scelta dei parametri ottimali e risultati di esperimenti
preliminari atti a migliorarlo.
Valutazione qualitativa e presentazione delle potenzialità di impiego
dei modelli fisici realizzati.
Si rimandano invece al capitolo 5 la presentazione del progetto di studio
clinico nato in seguito al lavoro svolto, e la descrizione degli esperimenti che
saranno realizzati insieme ad esso.
76
4.1
Segmentazione di Immagini TAC
La prima valutazione effettuata si riferisce alla segmentazioni di immagini
TAC del ginocchio, in casi sani e di frattura del piatto tibiale.
L’algoritmo semi-automatico sviluppato è stato descritto in sezione 2.4.1.
In immagini TAC l’intensità di ogni voxel è rappresentazione della radiodensità della struttura in esame nel punto considerato. Le ossa sono le
strutture anatomiche con radiodensità più alta, e risultano di conseguenza
iperintense in questo tipo di immagini. Sfruttando questa informazione, ci
si aspetta una segmentazione quasi totalmente automatica agevole, almeno
per quanto riguarda ossa sane.
Figura 4.1: Confronto tra immagini TAC di tibia sana, prima riga, e di tibia
fratturata, prima colonna
Come si osserva in figura 4.1, se si passa al caso di ossa fratturate, si
presentano diverse problematiche[24].
77
Un’immagine come quella in basso a sinistra in figura 4.1 presenta numerosi frammenti iperintensi di osso corticale. A causa della natura molto
frastagliata della frattura, la propagazione della segmentazione del frammento nelle altre slice non è immediata, a causa di brusche variazioni di intensità
dovute alla scarsa integrità del tessuto e alla sovrapposizione tra zone di osso
corticale e spongioso.
Nell’immagine in basso a destra, invece, si presenta un problema quasi
opposto: i frammenti sono pochi ma scarsamente distinguibili, a causa del
deterioramento della struttura ossea, e il loro contorno risulta meno intenso
rispetto a quanto ci si aspetterebbe in un’immagine di questo tipo.
In generale:
Per effettuare la segmentazione non si può sfruttare appieno la scala di
Hounsfield per le immagini TAC, in quanto le ossa fratturate presentano
variazioni anche sinificative di intensità.
Non si può applicare facilmente conoscenza a priori sulla regione da
segmentare: ogni caso può essere anche radicalmente diverso dal precedente per forma, topologia e numero dei frammenti.
Nelle successive sezioni, saranno analizzati i risultati per i due diversi casi,
di osso sano e fratturato.
4.1.1
Dati di Input
Sono state utilizzate in questa fase due immagini TAC della zona anatomica
del ginocchio, fornite dall’E.O. Ospedali Galliera di Genova.
La prima è un’immagine di ginocchio sano, con spacing 0.5x0.5x1.25mm.
La seconda è un’immagine di una frattura complessa di tipo I/II del piatto
tibiale, con spacing di 0.3x0.3x0.6mm.
In entrambe le immagini sono presenti le parti terminali di femore e tibia,
oggetti d’interesse della segmentazione, oltre che la rotula e parte della fibula.
78
4.1.2
Caso 1: Ginocchio Sano
L’immagine viene segmentata selezionando iterativamente le tre componenti
ossee d’interesse.
Figura 4.2: Segmentazione della parte terminale del femore e modello
tridimensionale prodotto, visualizzati utilizzando il software sviluppato.
La segmentazione è perfettamente accurata nel caso di femore e rotula,
come mostrato in figura 4.2.
Per la segmentazione della tibia, con il valore standard di soglia d’intensità
si incorre in un problema di esondazione della regione nella zona in cui tibia
e fibula sono strettamente connesse.
L’individuazione del problema è immediata anche grazie alla visualizzazione tridimensionale, e la risoluzione del problema è di semplice ottenimento
selezionando un più alto valore di soglia.
4.1.3
Caso 2: Ginocchio con Frattura
Anche in questo caso l’immagine viene segmentata selezionando iterativamente le aree anatomiche d’interesse. Questa immagine, di più alta risoluzione
rispetto alla precedente, richiede una scelta più accurata dei seed. La linea
guida che si segue è quella di scegliere una slide dove il contorno osseo corti-
79
Figura 4.3: Segmentazione problematica per esondazione della regione della
tibia, e correzione della stessa.
cale sia continuo e distinguibile per tutta la slice, e di porlo direttamente su
di esso.
Anche con un buon posizionamento è necessario un passaggio di raffinamento manuale utilizzando i tool forniti dalla piattaforma.
In figura 4.4 si osserva che una zona ipointensa, probabilmente a causa di effetti di rumore, non è riconosciuta correttamente. Il problema, limitato a poche slice, individuabili immediatamente grazie al modello tridimensionale, è facilmente correggibile a mano, o tramite abbassamento della soglia (preferibilmente attraverso la prima opzione, per non incappare
in sovrasegmentazione di zone cartilaginee quando la soglia diventa troppo
bassa).
80
Figura 4.4: Segmentazione della parte terminale del femore e modello tridimensionale prodotto, si nota l’imperfezione dovuta a una zona di corticale
ipointensa.
Più complessi sono i problemi che si presentano nella zona fratturata
della tibia. Nelle regioni in cui la frattura interessa solo l’osso corticale la
segmentazione riesce correttamente ad individuare e distinguere il tessuto
osseo, come mostrato in figura 4.5.
Figura 4.5: Segmentazione della tibia in regioni con frammenti di osso corticale, nel modello tridimensionale il piano rosso si posiziona all’altezza della
slice visualizzata a sinistra.
Quando invece i frammenti ossei sono mischiati ad osso spongioso, ipointenso, l’algoritmo non è più in grado di distinguere correttamente i confini
81
tra frammenti, osso spongioso, e tessuto non osseo.
Figura 4.6: Aree di frattura problematiche per l’algoritmo di segmentazione.
La simile intensità del tessuto osseo spongioso danneggiato e delle aree vuote
causa il fallimento dell’identificazione del corretto contorno nell’immagine a
sinistra, e il fallimento della creazione di un contorno chiuso nell’immagine a
destra.
Nei casi mostrati in figura 4.6 sono cerchiate in rosso una zona d’incertezza
tra un frammento osseo spongioso e l’area fratturata, a sinistra, e zone in cui
il confine tra l’osso spongioso sano e l’area fratturata non è chiaro, causando
il fallimento netto della segmentazione, a destra.
Anche per un operatore umano non è semplice risolvere queste situazioni
senza esperienza del problema. In questi casi è richiesto all’utente, il radiologo, di tracciare correttamente le zone di confine tramite il tool di segmentazione manuale: il riempimento dell’area cosı̀ racchiusa avviene successivamente
in modo automatico.
Si noti che questo genere di problemi non preclude la visualizzazione
corretta della superficie esterna, ma ne è necessaria comunque la correzione
in vista della produzione del modello fisico stampato, in cui zone cave interne
sono un problema ben più grande.
82
4.1.4
Tempi di segmentazione per i casi descritti
Si riportano in tabella 4.1.4 i tempi di segmentazione automatica e il numero
di slice problematiche per i casi considerati.
Caso 1
Caso 2
Dimensioni immagine:
512x512x89
512x512x280
Durata segmentazione automatica:
12s
21s
Slice problematiche:
9
20
Tipo di raffinamento:
Scelta Soglia
Manuale + Scelta Soglia
Tempo stimato di raffinamento:
30s
200s
Tabella 4.1: Tempi e modalità di segmentazione per i casi considerati.
Il tempo di segmentazione è quello medio calcolato su un computer portatile dotato di processore i5-3317U 1.70Ghz e scheda video NVIDIA GeForce
GT 740M.
Il tempo di raffinamento è quello stimato per un utente esperto e tiene
conto del tempo complessivo della ripetizione dello step di region growing nel
caso di nuova scelta della soglia e dell’eventuale utilizzo dello strumento di
correzione manuale.
83
4.2
Segmentazione di Immagini MRI
Nell’ottica di estendere la produzione di modelli tridimensionali ad altri tessuti, si è sviluppato un metodo di segmentazione basato su atlanti, testato
sulle ossa, ma facilmente generalizzabile a strutture anatomiche diverse.
L’algoritmo sviluppato è descritto in sezione 2.4.2.
In ortopedia, la risonanza magnetica è utilizzata intensivamente per esaminare ossa, cartilagini e tendini alla ricerca di lesioni e anomalie nei tessuti, oltre che per valutare i risultati degli interventi correttivi in studi
longitudinali.
Figura 4.7: Diversi esempi di problematiche comuni nella segmentazione di
immagini RM: presenza di artefatti nel primo riquadro da sinistra, disomogeneità interne allo stesso tessuto nel secondo riquadro da sinistra, scarso
contrasto tra tessuti diversi, nel terzo riquadro da sinistra.
La segmentazione automatica di questo tipo di immagini non è un compito scontato: l’intensità dei voxel non dipende in questo caso solo dalle
proprietà fisiche della struttura anatomica ma dai numerosi e diversi parametri di acquisizione, il rapporto segnale rumore in una singola immagine può
variare considerevolmente tra diversi tessuti, sono spesso presenti artefatti e
in generale uno stesso tessuto può presentare disomogeneità anche rilevanti
e il contrasto tra tessuti diversi può non essere evidenziato nella sequenza di
acquisizione scelta (figura 4.7).
84
4.2.1
I dati di Input
Sono state utilizzate 54 immagini MRI di ginocchi sinistri, estratte dal database del Grand Challenge SKI10[34] del MICCAI 2010.
Le immagini sono ottenute da uno studio multicentrico statunitense, e
sono provenienti da un vasto range di macchinari di diversi produttori (i.e.
General Electric, Siemens, Philips, Toshiba e Hitachi), e con diverse caratteristiche, con un campo di 1.5T nel 90% dei casi, 3T e più raramente 1T nei
restanti.
Le 54 immagini utilizzate sono tutte pesate T1, utilizzano sequenze GRE1
o SPGR2 , che permettono di evidenziare il confine osso-cartilagine, e hanno
spacing di circa 0.4Ö0.4Ö1mm. Le immagini sono anonimizzate e tutte le
tag DICOM tranne quelle relative a spacing e dimensioni sono eliminate.
Per ogni immagine è disponibile la segmentazione delle regioni della tibia,
del femore, della cartilagine tibiale, e della cartilagine femorale, effettuate da
esperti radiologi per fini diagnostici.
Un test set di 4 immagini è estratto casualmente dalle 54 disponibili, ed
è escluso da ogni fase di scelta dei parametri.
1
2
GRE: Gradient Echo
SPGR: Spoiled Gradient Recalled Echo
85
4.2.2
Valutazione quantitativa della performance
Per valutare la performance dell’algoritmo di segmentazione si è utilizzata
una metrica simile a quella utilizzata nel framework del Grand Challenge[34]
da cui sono state tratte le immagini.
Si considerano i voxel di superificie, definiti come quei voxel che abbiano
almeno uno dei 18-neighbour non appartenenti alla label considerata.
Per tener conto dell’anisotropia dello spacing, prima di effettuare questa
selezione si passa per una fase di resampling che raddoppia il numero di slice
nella direzione di acquisizione, portando le immagini a uno spacing di circa
0.4Ö0.4Ö0.5mm.
Su questi voxel sono calcolate due misure:
Average Symmetric Surface Distance (AvgD). Per ogni voxel di super-
ficie è cercato il voxel di superficie più vicino nell’immagine di riferimento, e si registra la sua distanza euclidea in millimetri. La media
delle distanze di tutti i voxel di superficie è il valore cercato.
Root-Mean-Square Symmetric Surface Distance (RMSD). Calcolata al-
lo stesso modo, ma le distanze sono elevate al quadrato, e il valore cercato è la radice della loro media. Questa misura tende a penalizzare di
più distanze alte dal riferimento.
Sono fornite dagli organizzatori del Grand Challenge le distanze medie
dalla segmentazione considerate accettabili, qui riportate in tabella 4.2.
Struttura
AvgD75
RM SD75
Osso Femorale
0.45mm
0.77mm
Osso Tibiale
0.37mm
0.62mm
Tabella 4.2: Valori di riferimento per le distanze medie accettabili dalla segmentazione manuale, fornite dagli organizzatori del Grand Challenge ‘SKI10’
del MICCAI 2010.
86
In un range da 0 a 100, dove 100 è la segmentazione esattamente corrispondente a quella di riferimento, una distanza media pari a quella accettabile corrisponde a 75 punti, misure due volte più distanti corrispondono a 50
punti, tre volte a 25 punti.
SAvgD = 100.0 − 25.0
AvgD
AvgD75
RM SD
RM SD75
I punteggi cosı̀ calcolati per AvgD e RMSD sono mediati insieme per dare
SRM SD = 100.0 − 25.0
la misura complessiva di performance cercata.
Oltre a questa misura, per valutare la bontà del risultato finale si utilizza
un parametro più comune in letteratura, il coefficiente di similarità di Dice
(DSC), definito come:
DSC =
2|A ∩ B|
|A + B|
Dove A e B sono rispettivamente la segmentazione ottenuta, e quella di
riferimento.
87
4.2.3
Performance al variare dei parametri
Si considerino i seguenti range per i due parametri liberi N e α:
N ∈ {2, 6, 10, 14}
α ∈ {0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1.0}
Dalle 50 immagini sono estratti casualmente 14 atlanti (valore limite di
N ), in questa fase la performance è misurata su tutte le 36 rimanenti. Gli
atlanti, al variare di N , sono scelti sempre tra i 14 esclusi inizialmente.
Tutte le analisi di questa fase sono relative a una prima scelta, randomizzata, degli atlanti.
Viene mostrato nel seguito il risultato di performance sulle 36 immagini
al variare di α, fissata la scelta di N .
N =2
80
70
Performance
60
50
40
30
20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
α
Figura 4.8: N = 2, performance al variare di α
88
N =6
90
80
Performance
70
60
50
40
30
20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
α
Figura 4.9: N = 6, performance al variare di α
N = 10
90
80
Performance
70
60
50
40
30
20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
α
Figura 4.10: N = 10, performance al variare di α
89
N = 14
90
80
Performance
70
60
50
40
30
20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
α
Figura 4.11: N = 14, performance al variare di α
Confrontando tra loro le diverse scelte di N , si osserva un andamento
simile dei risultati, fatta esclusione per il caso N = 2, molto più stabile
su risultati bassi, in cui l’informazione a priori data dalle registrazioni non
è, prevedibilmente, abbastanza robusta per essere migliorata sensibilmente
dall’informazione di intensità, comunque questa venga modellata.
Si osserva una crescita di performance per ogni altra scelta di N nel range
α : {0.1 . . . 0.6} e una successiva stabilizzazione, con decrescita di performance da α = 0.9 in poi, denotata anche da un’allargamento nella varianza dei
risultati.
I grafici seguenti mostrano la performance al variare di N , fissati via via
gli α migliori, ovvero quelli nel range {0.6, 0.7, 0.8}
90
α = 0.6
90
80
Performance
70
60
50
40
30
20
2
6
10
14
N
Figura 4.12: α = 0.6, performance al variare di N
α = 0.7
90
80
Performance
70
60
50
40
30
2
6
10
14
N
Figura 4.13: α = 0.7, performance al variare di N
91
α = 0.8
90
80
Performance
70
60
50
40
30
2
6
10
14
N
Figura 4.14: α = 0.8, performance al variare di N
Si nota in questo caso una crescita di performance con N nei primi due
step, per poi stabilizzarsi su N = 10 e N = 14.
Per scegliere i parametri migliori e confermare le osservazioni fatte, si
segue un procedimento chiamato ‘cross-validazione a 4-fold’, per il quale:
Le 36 immagini del dataset sono suddivise in quattro gruppi da 9
immagini ciascuno.
Iterativamente si esclude un gruppo, chiamato validation set.
Si sceglie la combinazione di N e α che da il risultato medio migliore
sugli altri tre gruppi, chiamati training set.
Si misura la performance della combinazione cosı̀ ottenuta sul valida-
tion set.
Si confermano le valutazioni sopra effettuate: due fold su quattro votano
per la combinazione [0.6, 14], che mostra nel migliore dei due casi uno score
medio di 80.85.
92
90
85
Performance
80
75
70
65
60
55
Fold 1: [0.7 14]
Fold 2: [0.6 14]
Fold 3: [0.6 14]
Fold 4: [0.5 14]
Figura 4.15: Confronto della performance sui rispettivi validation set per le
scelte di [α N] effettuate sui quattro fold di training.
Si noti il valore anomalo votato dal quarto fold, caso di ‘overfitting’ dei
parametri al training set, che porta ad una scarsa performance sul validation
set.
In tabella 4.3 sono riportati i risultati completi per sedici casi estratti dal
dataset con questa scelta dei parametri. In rosso e verde sono evidenziati
rispettivamente risultato peggiore e migliore.
93
Femore
Tibia
n°
AvgD
RMSD
Max
AvgD
RMSD
Max
Score
3
0.25
0.44
3.12
0.38
0.73
8.07
80.2
16
0.70
0.89
5.96
0.50
0.79
6.74
69.6
23
0.36
0.76
11.73
0.27
0.56
7.07
80.3
27
0.25
0.40
3.65
0.27
0.41
3.83
85.7
33
0.27
0.52
6.37
0.26
0.54
5.88
83.6
47
0.36
0.69
4.98
0.61
1.12
7.84
69.6
48
0.39
0.83
7.68
0.20
0.39
4.03
82.5
64
0.65
1.35
8.53
0.32
0.45
3.29
73.3
65
0.29
0.54
5.89
0.41
0.74
5.78
78.5
66
0.20
0.35
2.37
0.19
0.33
3.45
88.7
70
0.21
0.42
4.32
0.19
0.37
5.90
87.6
73
1.39
2.08
12.27
0.25
0.49
5.45
61.0
77
0.51
1.17
14.90
0.68
1.41
10.80
60.4
83
0.55
1.18
8.64
0.29
0.58
4.24
74.7
99
0.28
0.65
8.88
0.20
0.38
3.28
85.0
100
0.19
0.36
3.12
0.26
0.55
6.74
85.4
Tabella 4.3: Risultati per un sottoinsieme delle immagini del dataset.
94
In tabella 4.4 sono riportati i risultati completi per i quattro casi del test
set, che risultano compatibili con le distribuzioni osservate sul training set.
Femore
Tibia
n°
AvgD
RMSD
Max
AvgD
RMSD
Max
Score
6
0.33
0.78
11.58
0.30
0.61
7.03
79.5
29
0.22
0.39
2.50
0.28
0.46
3.92
85.3
41
0.19
0.37
3.12
0.31
0.63
7.42
83.7
92
0.29
0.58
5.40
0.37
0.74
7.10
78.8
Tabella 4.4: Risultati per i 4 casi del test set.
Si conferma dall’analisi di questi risultati che il metodo ottiene buoni
risultati sulla maggior parte delle immagini, ma si evidenziano altresı̀ alcuni
problemi evidenti. In particolare per due casi (73 e 77) i risultati sono ben
inferiori alla media, e segnalano il fallimento del metodo di segmentazione.
Altri casi (e.g. 47 e 64) risultano problematici per quanto non completamente
fallimentari.
In tabella 4.2.3 i coefficienti di similarità di Dice (DSC) medi calcolati
sull’intero dataset di 36 immagini e sul test set, sono confrontati con i valori
di riferimento per il metodo implementato [71].
Data Set
Test Set
Shan et al.[71]
Femore
Tibia
Femore
Tibia
Femore
Tibia
DSC Medio:
97.2%
97.6%
98.1%
97.7%
97.3%
96.5%
DSC Std.Dev.:
1.4%
0.9%
0.3%
0.2%
0.8%
1.1%
Tabella 4.5: Confronto tra media e deviazione standard dei DSC calcolati
sull’intero dataset e sul test set, e quelli riportati dal lavoro di riferimento.
I valori del test set risultano nuovamente compatibili con quelli calcolati
sull’intero data set, mostrando buona stabilità del metodo implementato. I
risultati sono in linea con quelli riportati nella letteratura di riferimento.
95
4.2.4
Performance al variare dell’atlante
La scelta degli atlanti è solitamente una componente fondamentale della classe di metodi a cui appartiene l’algoritmo che si è presentato, per la necessità
di avere a disposizione un campione che sia il più rappresentativo possibile
dell’anatomia tipo della struttura da segmentare.
Nell’applicazione considerata, tuttavia, si devono considerare alcuni fattori chiave:
Le variazioni inter-paziente sono compensate almeno parzialmente dalla
forte componente deformabile della registrazione, se andata a buon fine.
Sono integrate insieme informazioni da un numero rilevante di atlan-
ti, come dimostrato dal plateu di performance media raggiunto con il
crescere di N .
Per queste ragioni, va verificato se al variare della scelta degli atlanti si
osservi o meno una variazione rilevante della performance.
La procedura di selezione dei parametri descritta precedentemente è ripetuta per 4 scelte casuali dei 14 atlanti di partenza.
I risultati migliori sui validation set sono riassunti in tabella 4.6
Atlante n°
α
N
Median Score
Mean Score
1
0.6
14
80.8
78.8
2
0.7
10
82.6
79.7
3
0.8
14
79.9
77.1
4
0.6
14
83.4
80.5
Tabella 4.6: Risultati sui validation set per quattro scelte indipendenti degli
atlanti, performance mediana e media.
I risultati sono vicini tra loro, ma è lecito domandarsi come varino sulle
singole immagini. In figura 4.16 si mostra il grafico della performance dei
diversi atlanti per le sedici immagini comuni ai loro dataset.
96
100
90
80
Performance
70
60
50
40
30
Random Atlas n°1
Random Atlas n°2
Random Atlas n°3
Random Atlas n°4
20
10
0
3
16
23
27
33
47
48 51 64 66
Case Number
70
73
77
83
99 100
Figura 4.16: Confronto della performance su sedici immagini, utilizzando
i quattro atlanti differenti con parametri ottimi scelti singolarmente per
ognuno.
In figura 4.17 si mostra il grafico della performance dei diversi atlanti per
le quattro immagini del test set.
Si osserva come per una sola immagine delle sedici si osservi una variazione sostanziale di performance (caso n°99, 20 punti di distanza tra migliore
e peggior risultato).
L’andamento per le restanti immagini mostra come la variazione media
evidenziata in tabella 4.6 si distribuisca in modo simile sulle singole immagini.
In altre parole, i casi migliori e peggiori restano tali al variare dell’atlante.
Anche i risultati sul test set confermano questo andamento.
Da queste osservazioni si può dedurre che nonostante una diversa scelta
dell’atlante possa risolvere problemi su singole immagini e migliorare in media
i risultati, per ottenere un aumento consistente di performance si debbano
97
100
90
80
Performance
70
60
50
40
30
Random Atlas n°1
Random Atlas n°2
Random Atlas n°3
Random Atlas n°4
20
10
0
6
29
41
92
Case Number
Figura 4.17: Confronto della performance sulle quattro immagini del test set,
utilizzando quattro atlanti differenti con parametri ottimi.
indagare anche altre strategie, in particolare tecniche di registrazione diverse
da quella impiegata.
98
4.2.5
Valutazione qualitativa delle segmentazioni
L’osservazione dei risultati delle segmentazioni prodotte col metodo descritto
possono portare a diverse osservazioni: sono mostrate nel seguito tre segmentazioni esemplificative dei casi per cui la segmentazione può considerarsi ben
riuscita (score ≥ 80), problematica (score ≤ 75) e fallita (score ≤ 70).
Caso n°27, score 85.7
Questa immagine ottiene un ottimo score, lo studio qualitativo della segmentazione mostra ottimi risultati in ogni zona della struttura d’interesse
4.18.
Figura 4.18: Segmentazione dell’immagine 27.
Il buon contrasto dell’immagine e la regolarità della struttura ossea del
paziente permettono la buona riuscita delle registrazioni, con conseguente
99
risultato ottimale confermato sia dai risultati quantitativi, sia dall’indagine
del modello tridimensionale generato.
Caso n°64, score 73.3
Questa immagine ottiene uno score basso, ma ancora accettabile. Si nota
una buona segmentazione generale della tibia, e nel femore lungo l’interfaccia osso-cartilagine, mentre in alcune zone femorali di confine con aree non
cartilaginee i risultati sono pessimi (figura 4.19).
Figura 4.19: Aree problematiche dell’immagine 64.
Nelle zone cerchiate in figura 4.19 buona parte delle registrazioni fallisce
l’identificazione del confine corretto dell’ osso, come mostrano le immagini
della somma dei voti degli atlanti, e la likelihood in questo caso non può
100
aiutare (e contribuisce anzi al peggiormaneto del risultato) in quanto i livelli
di grigio sono comparabili.
Caso n°73, score 61.0
Questa immagine ottiene uno score pessimo, ben al di sotto della media,
dovuto al fallimento della registrazione di numerosi atlanti, in numerose zone
anatomiche. In figura 4.20 si mostrano la segmentazione, la somma dei voti
degli atlanti e la sovrapposizione delle due, per una slice esemplificativa.
Figura 4.20: Slice problematica dell’immagine 73.
Anche in questo caso, come in quello precedente, quando la somma delle
segmentazioni degli atlanti non è ben definita ma forma una figura confusa,
l’informazione di likelihood non può aiutare.
Si nota complessivamente che anche nei casi peggiori la zona di confine
con la parte cartilaginea ottenga sempre buoni risultati, grazie sia al miglior
accordo tra le registrazioni in queste zone, sia alla possibilità di eliminare gli
errori sfruttando l’elevata intensità dei voxel di cartilagine in questo tipo di
immagini.
La diafisi delle ossa, e in particolare quella del femore, è invece spesso
posizionata in zone anatomiche non corrispondenti, ma dalla simile intensità.
Questi errori grossolani sono probabilmente dovuti alla scarsa capacità del
processo di regsitrazione di distinguere tra zone d’intensità simili; in questo
caso altre strutture fisiche come muscoli e grasso, molto variabili da paziente a
101
paziente, possono guidare le trasformazioni rigide e affini della registrazione,
provocando una traslazione della diafisi del femore troppo ampia per essere
corretta efficacemente dalle fase successive.
Una seconda ipotesi è che le differenze di posizionamento di un’articolazione complessa come quella del ginocchio siano troppo ampie per permettere
la corretta registrazione delle immagini nella loro totalità. In questo caso, la
separazione della registrazione per i diversi segmenti ossei potrebbe portare
ad un miglioramento sostanziale dei risultati.
102
4.2.6
Miglioramento del processo di registrazione
Come evidenziato nella sezione precedente, gran parte dei problemi di questo metodo sembrano relativi al fallimento del processo di registrazione per
alcune regioni ossee.
Le ipotesi che vengono fatte sono le seguenti:
Eccessiva variabilità di posizionamento relativo di femore e tibia, a
causa dei molti gradi di liberà dell’articolazione.
Eccessivo peso di strutture anatomiche diverse da quelle ossee nel pro-
cesso di registrazione. La grande variabilità dei tessuti muscolari e
adiposi potrebbe condizionare troppo la trasformazione finale.
Per risolvere questi problemi, si può sfruttare l’utilizzo di maschere durante il processo di registrazione, e disaccoppiare il procedimento per tibia e
femore.
In particolare si prevede l’utilizzo di due maschere:
Una maschera per l’immagine da segmentare, che isoli selettivamente
la regione dell’immagine in cui ci si aspetta di trovare il segmento osseo
d’interesse.
Una maschera per ogni immagine dell’atlante, derivata dall’espansione
della segmentazione nota del segmento osseo d’interesse.
Nello specifico, la maschera per l’immagine da segmentare tiene conto dei
3/5 superiori o inferiori dell’immagine, rispettivamente per l’individuazione
del femore e della tibia, come mostrato in figura 4.21.
Per quanto riguarda le maschere delle immagini dell’atlante, ovvero dell’immagine da registrare, si sfrutta la conoscenza dell’esatta regione ossea.
Partendo dalla segmentazione del segmento anatomico considerato, la si
espande tramite un processo morfologico di dilatazione, e si utilizza la regione
cosı̀ trovata per guidare la registrazione, come mostrato in figura 4.22.
103
Figura 4.21: Maschere scelte nel processo di registrazione per l’immagine da
segmentare.
Figura 4.22: Maschere scelte nel processo di registrazione per un’immagine
dell’atlante.
104
Si analizzano i risultati di questo approccio su un’immagine problematica
analizzata nella sezione precedente.
Caso n°64, vecchio score 73.3, nuovo score 81.7
Si mostra in figura 4.23 il confronto tra le zone di segmentazione problematica
analizzate precedentemente (colonna centrale) e la segmentazione ottenuta
implementando il nuovo processo di registrazione.
Figura 4.23: Aree problematiche dell’immagine 64 nella prima colonna, segmentazione con registrazione complessiva per l’intera immagine nella seconda
colonna e segmentazione con il nuovo processo di registrazione disaccoppiata
per femore e tibia nella terza colonna.
Si osserva come il primo problema sia completamente risolto con il nuovo
approccio, e come anche nella seconda area problematica i miglioramenti
105
siano evidenti, per quanto non si ottenga ancora un risultato perfetto.
Queste osservazioni qualitative sono confermate dal confronto delle misure
di performance, mostrate in tabella 4.7
Femore
Tibia
metodo:
AvgD
RMSD
Max
AvgD
RMSD
Max
Score
1
0.65
1.35
8.53
0.32
0.45
3.29
73.3
2
0.30
0.55
4.14
0.36
0.50
4.75
81.7
Tabella 4.7: Risultati quantitativi sull’immagine selezionata per la vecchia
strategia di registrazione (1) e la nuova (2).
Anche nel modello tridimensionale prodotto si conferma il miglioramento
del risultato (figura 4.24).
Figura 4.24: Modelli tridimensionali prodotti dalla segmentazione dell’immagine scelta. Confronto di quello ottenuto con il nuovo metodo di registrazione
e il precedente.
106
4.3
Stampa 3D
Il risultato della segmentazione delle immagini TAC precedentemente descritte è stato utilizzato per produrre modelli tridimensionali fisici delle strutture
anatomiche d’interesse.
Nel corso dello sviluppo di questo progetto sono state studiate le tecnologie impiegabili per ottenere questo risultato, presentate in sezione 3.2 e
sono state realizzate diverse stampe di prova, sottoposte ai medici radiologi
e ortopedici dell’E.O. Ospedali Galliera di Genova per una valutazione delle potenzialità di strumenti di questo tipo nell’innovazione del processo di
pianificazione pre-chirurgica.
Si è proceduto iterativamente, ascoltando di volta in volta i consigli e le
osservazioni degli interessati per selezionare casi di stampa più interessanti
per tecnologia e soggetto clinico.
Le potenzialità individuate sono molteplici, e dopo una prima fase di
discussione generale, seguita alla stampa del primo caso presentato, si è deciso
di focalizzasi sull’utilizzo in casi di fratture complesse del piatto tibiale.
Sono mostrate nel seguito le quattro stampe realizzate e sottoposte alla
valutazione dei medici, nell’ordine temporale in cui sono state prodotte nel
corso del progetto.
4.3.1
Caso 1: Stampa IJP di Ginocchio Sano
La prima stampa realizzata è di un ginocchio sano completo di tibia, femore
e rotula, la cui segmentazione è stata mostrata in sezione 4.1. La tecnologia
impiegata è quella dell’Inkjet Printing, descritta precedentemente nel corso
di questo lavoro, che impiega un materiale simil-gesso molto vicino come
composizione al Plaster.
Le tre strutture ossee separate sono collegate assieme da tre ponti fisici,
due tra femore e tibia, e uno tra femore e rotula, per preservare le distanze
anatomiche nel modello finale, come mostrato in figura 4.25.
107
Il modello finale è reso cavo per renderlo più leggero, cosı̀ da non sovraccaricare i piccoli ponti fisici posizionati. In figura 4.26 si nota il foro di uscita
della polvere non trattata con il liquido adesivo.
L’impatto con i medici dell’E.O. Ospedali Galliera è stato molto positivo.
Dalla discussione delle potenzialità di una stampa di questo tipo in diverse
applicazioni ortopediche, le potenzialità più evidenti per i medici consultati
sono risultate:
Analisi dimensionale della struttura anatomica, e confronto con mate-
riali prostetici per verificarne il match in casi statici e dinamici.
Migliore comprensione della struttura anatomica per casi complessi, e
acquisizione di conoscenza tattile.
Simulazione di operazioni di riduzione di frattura, e scelta del posizio-
namento/modellazione di strumenti chirurgici.
La cavità interna, problematica per eventuali test di manipolazione con
strumenti chirurgici (trapano/bisturi) se lasciata vuota, potrebbe essere invece sfruttata efficacemente per un successivo inserimento di un materiale
diverso e con diverse proprietà fisiche, più adatto ad essere manipolato o con
proprietà meccaniche utili alla simulazione.
La produzione di questo modello ha impiegato circa 6 ore di stampa, con
un costo approssimativo di materiale di 50 euro.
108
Figura 4.25: Stampa di ginocchio sano, vista 1. Si notino i ponti fisici per
preservare le inter-distanze anatomiche tra i diversi segmenti ossei.
109
Figura 4.26: Stampa di ginocchio sano, vista 2. Si noti il foro di uscita della
polvere non curata, per rendere cavo il modello.
110
4.3.2
Caso 2: Stampa IJP di Tibia Fratturata
La seconda stampa realizzata è di un caso di frattura complessa di piatto
tibiale (tipo I/II), la segmentazione dell’intero ginocchio è stata mostrata in
sezione 4.1.
Il caso in oggetto è stato operato da un chirurgo ortopedico dell’E.O.
Ospedali Galliera, precedentemente alla produzione del modello, che avrà il
compito di confrontare quanto realizzato con la realtà anatomica incontrata
in sala operatoria, per dare indicazioni a posteriori sulle potenzialità del
modello in questi interventi.
Il modello tridimensionale della tibia fratturata è stato isolato dalle altre
componenti segmentate (femore e rotula) e utilizzato per ottenere una stampa
3D in Plaster con la medesima tecnologia di Inkjet Printing descritta per il
caso precedente.
In questo caso il modello fisico non è cavo, ma completamente pieno,
per valutare l’applicabilità di tecniche di manipolazione chirurgica tramite
trapano e bisturi a un modello di questo tipo.
In casi come quello considerato il chirurgo:
Rimuove o solleva il frammento del piatto tibiale affondato.
Riempe di materiale osseo di supporto la cavità interna formata.
Rinforza la struttura con il posizionamento di una placca di sostegno
fissata con viti di lag.
Il modello fisico può essere d’aiuto in ognuna di queste fasi attraverso:
Valutazione della finestra di accesso migliore per la rimozione dei fram-
menti, il sollevamento del piatto tibiale, e l’inserimento di innesti ossei.
Valutazione della direzione ottima di inserimento delle viti, e delle loro
dimensioni.
Valutazione del matching della placca di sostegno con l’anatomia del
paziente, ed eventuale modellazione della stessa in fase pre-operatoria.
111
La produzione di questo modello ha impiegato circa 6 ore di stampa,
con un costo approssimativo di materiale sotto ai 90 euro, superiore al caso
precedente per la necessità di stampa piena che aumenta il volume totale
nonostante l’assenza di tibia e rotula.
Figura 4.27: Stampa di tibia sana, vista 1.
112
Figura 4.28: Stampa di tibia fratturata, vista 2.
113
Figura 4.29: Stampa di tibia fratturata, vista 3.
114
4.3.3
Casi 3 e 4: stampe SLA di Tibia Fratturata
Le ultime due stampe realizzate in questo progetto derivano dalla segmentazione della frattura complessa di piatto tibiale già descritta per il caso precedente, utilizzano la tecnologia di Stereolitografia(descritta in 3.2) e sfruttano come materiale una resina epossidica chiamata commercialmente Accura
Clearvue®.
Su uno dei due modelli è applicata una verniciatura che permette di apprezzarne meglio la trasparenza, che offre interessanti possibilità per valutare
la traiettoria delle viti eventualmente inserite in maniera più soddisfacente,
o per presentare dettagli interni alla struttura anatomica.
Queste stampe hanno un costo dei materiali intorno ai 100 euro al pezzo,
e hanno tempi di realizzazione di circa dodici ore. Per quanto meno resistenti dei modelli stampati precedentemente, alcuni studi[22] indicano che
questa tecnologia potrebbe essere adattabile anche alla foratura con trapano
elettrico.
Il modello fisico è reso cavo a 3mm dalla parete esterna, come mostrato
in figura 4.31. Si valuterà la possibilità di riempire il modello con un secondo
materiale per dare solidità alla struttura.
Al contrario dei materiali utlizzati nei casi precedenti, per cui non si hanno
informazioni in proposito, la resina epossidica dovrebbe essere caratterizzata
da una buona compatibilità con la sterilizzazione tramite irradiazione con
raggi γ, come indicato dalla norma ISO 11137:1995[39].
Viene inoltre segnalata dal produttore la capacità del materiale di passare
i test ‘USP Class 6’3 che ne dimostra le potenzialità per l’applicabilità in
dispositivi medici.
Per queste ragioni l’utilizzo di questa tecnologia potrebbe essere una scelta
migliore rispetto alla precedente nonostante il costo maggiore e il maggior
tempo di produzione.
3
USP: U.S. Pharmacopeial Convention, organizzazione no-profit che definisce un test
standard per la biocompatibilità di materiali plastici, i risultati sono classificati in una
scala da 1 a 6, dove VI rappresenta il livello più alto di biocompatibilità.
115
Figura 4.30: Stampa di tibia fratturata in resina epossidica. Diverse viste.
116
Figura 4.31: Stampa di tibia fratturata in resina epossidica verniciata.
Dettagli.
117
Capitolo 5
Progetto di Studio Clinico
Pilota
Dalla presentazione dei prototipi fisici realizzati in questo progetto ai medici
dell’E.O. Ospedali Galliera di Genova è scaturito un vivo interesse per la
possibilità di applicazione della tecnologia di Stampa 3D a casi di fratture
complesse del piatto tibiale. Nelle fasi conclusive del progetto descritto in
questa tesi, si è configurata la possibilità concreta di proporre uno studio
clinico pilota su queste casistiche, e nel Marzo 2014 è stata presentata una
prima richiesta di finanziamento per la sua attuazione.
Si presentano in questo capitolo: il background della proposta di studio
cosı̀ configuratasi, i risultati attesi e un metodo di valutazione dei risultati
raggiunti attraverso l’utilizzo di Stampa 3D.
Si identificano inoltre alcune proposte di esperimenti futuri sulla piattaforma software sviluppata, utili per la sua applicazione all’interno dello
studio proposto.
118
5.1
Studi precedenti
Per la formulazione della proposta di studio pilota, si è potuto fare riferimento
ad alcuni casi di studio presenti in letteratura, già citati senza entrare nel
merito in sezione 3.2.
Possiamo dividere le applicazioni simili in tre categorie:
Applicazioni alla chirurgia ortopedica per le fratture del bacino.
Applicazioni alla chirurgia spinale.
Applicazioni alla chirurgia maxillofacciale.
Per quanto riguarda la prima categoria, si segnalano due applicazioni
notevoli:
Uno studio[8] utilizza la tecnologia del Fused Deposition Molding, ap-
plicata ad un filo di ABS, per generare modelli tridimensionali di fratture pelviche complesse. Il modello è utilizzato per valutare la posizione
ottima di placche di sostegno e per valutare le traiettorie e le dimensioni delle viti, non è specificato se solo attraverso l’ispezione visiva o
direttamente sul modello. Vengono commentati 4 casi clinici di applicazione, e si registra da parte del chirurgo una migliore comprensione
della frattura e un minor tempo d’intervento rispetto alla media.
Uno studio[37] utilizza la tecnologia del Selective Laser Sinthering per
generare modelli tridimensionali in Nylon di fratture pelviche complesse. I modelli sono utilizzati per la fase di preparazione chirurgica, ed
in particolare è effettuato il confronto tra i risultati della classificazione
delle fratture utilizzando imaging convenzionale e attraverso l’indagine
del modello su 30 casi di applicazione. Si registra un miglioramento
nella classificazione e nella comprensione delle fratture.
Nella chirurgia spinale si citano i seguenti casi:
119
In un caso[40] si utilizza la tecnologia della Stereolitografia per la piani-
ficazione di operazioni di chirurgia spinale su malformazioni e tumori.
I modelli, in resina acrilica, sono utilizzati in 18 casi complessi, in cui
la visualizzazione attraverso i sistemi di imaging tradizionale non era
risultata soddisfacente. I modelli sono stati sterilizzati e utilizzati in
fase operatoria. Un questionario è sottoposto ai medici dopo l’operazione. Dai risultati si segnala un costo ridotto dell’intervento, un miglioramento della comprensione del problema e una diminuzione delle
complicazioni intra-operatorie.
In uno studio che utilizza la stessa tecnologia[22] si segnala la possibilità
di forare i modelli con un comune trapano elettrico, e di valutare le
traiettorie ottime delle viti direttamente sul modello utilizzando perni
metallici (vedi figura 5.1(a)).
(a)
(b)
Figura 5.1: Esempi di utilizzo di modelli fisici in studi precedenti: per testare
le traiettorie delle viti in chirurgia spinale, (a), e per sagomare le placche di
sostegno in chirurgia maxillofacciale, (b).
In chirurgia maxillo-facciale:
già in uno studio del 2004 [82] si utilizza la tecnologia di InkJet Printing
per creare modelli in Plaster di mandibole fratturate, per effettuare la
120
sagomazione pre-operatoria delle placche di sostegno (operazione di
‘contouring’) e la determinazione della dimensione ottimale delle viti
per fissarle (vedi figura 5.1(b)).
Filo conduttore di tutti questi lavori è la decisione in fase pre-operatoria
del posizionamento di strumenti di sostegno all’osso danneggiato, della loro modellazione, e della scelta della traiettoria e della lunghezza delle viti.
Questi fattori, fondamentali per ridurre il tempo di intervento sul paziente,
rendendo la stampa compatibile economicamente con la pratica clinica, e per
ottenere un miglioramento dei risultati, sono direttamente trasferibili al caso
di frattura del piatto tibiale.
Tecnologia:
SLA
IJP
Tempo Medio di Produzione:
>10h
<7h
Sterilizzabile
sı̀, γ radiation
non testato
Forabile al Trapano
sı̀ (delicato)
sı̀
Tabella 5.1: Confronto tra SLA e IJP.
I materiali e le tecnologie utilizzate variano a seconda dello studio considerato. Le tecnologie che sono state considerate più rilevanti, sia dall’analisi
dell’esistente letteratura sia dal confronto con aziende del settore della stampa 3D, sono quelle dell’InkJet Printing e della Stereolitografia, pro e contro
di ognuna sono riassunti in tabella 5.1.
121
5.2
Modalità e Risultati Attesi
Saranno considerati pazienti ricoverati per fratture del piatto tibiale, sottoposti a radiografia digitale (RX) e TAC volumetrica.
Le immagini volumetriche TAC saranno utilizzate per la segmentazione
della struttura ossea e la stampa del modello 3D, che verrà sfruttato nella
fase di pianificazione pre-operatoria.
Si valuteranno la concordanza tra radiologo e ortopedico nella definizione
della “personalità” della frattura, la durata media degli interventi ed il tempo
medio di utilizzo della scopia intraoperatoria.
Il chirurgo giudicherà inoltre mediante apposito questionario i vantaggi
riscontrati complessivamente dall’utilizzo del modello.
Ci si propone quindi di:
Verificare se l’analisi pre-operatoria di un modello tridimensionale di
frattura del piatto tibiale migliori la definizione della “personalità” della
frattura da parte del chirurgo ortopedico, rispetto alla sola valutazione
dell’imaging radiologico preoperatorio (radiografia tradizionale e TAC).
Verificare se l’analisi preoperatoria di un modello tridimensionale di
frattura del piatto tibiale riduca il tempo medio della procedura chirurgica e quello della scopia intraoperatoria rispetto al tempo medio
richiesto dallo stesso operatore senza l’ausilio della stampa tridimensionale.
Ci si attende:
Che l’utilizzo di modelli fisici in fase pre-peratoria porti a una si-
gnificativa riduzione dei tempi di intervento e di utilizzo della scopia
intraoperatoria.
Che il chirurgo sia agevolato nella definizione della “personalità” della
frattura.
122
5.3
Fase 1: Classificazione della Frattura
Si rende necessaria una fase preliminare di classificazione della frattura per
determinare l’inclusione del paziente nello studio.
La classificazione standard per le fratture del piatto tibiale è quella definita da Schatzker[69], che suddivide le fratture in cinque tipologie: ognuna
racchiude casi simili per meccanismo traumatico, trattamento e prognosi.
Figura 5.2: Classificazione delle fratture del piatto tibiale.
Tipo I: frattura per fissurazione a cuneo del piatto tibiale esterno, po-
tenzialmente associata a lesione del menisco esterno. È causata da forze
assiali e flettenti.
Tipo II: frattura per fissurazione con affossamento del piatto tibiale
esterno. È causata da forze assiali e flettenti, spesso su osso osteoporotico.
Tipo III: frattura per affossamento del piatto tibiale esterno. È causata
da forze di compressione.
123
Tipo IV: frattura del piatto tibiale mediale, potenzialmente associata
a frattura intercondiloidea. È causata da fissurazione o compressionefissurazione.
Tipo V: frattura di entrambi i piatti tibiali. Avviene per fissurazione
dei due piatti, mediale e laterale.
Tipo VI: frattura del piatto tibiale associata ad una frattura della
giunzione meta-diafisaria.
È causata da forze di compressione che
comportano l’affondamento di uno o entrambi i piatti tibiali.
Le fratture del Tipo I non sono prese in considerazione nello studio
proposto.
Tutte le altre tipologie richiedono un trattamento chirurgico di osteosintesi interna con placca di sostegno e viti di lag che potrebbe trarre particolare
vantaggio da una fase di pianificazione con modelli fisici, e sono quindi incluse
nello studio.
La valutazione preliminare della frattura, in accordo alla classificazione
sopra definita, viene eseguita dal ragiologo sulle immagini RX. I pazienti
con fratture che soddisfano i criteri di inclusione vengono sottoposti a TAC
e dall’immagine volumetrica cosı̀ ottenuta viene prodotta la segmentazione
utilizzando la piattaforma software sviluppata.
124
5.4
Fase 2: Pianificazione e Intervento
Il modello viene stampato con le tecniche di Stereolitografia o di InkJet
Printing selezionate, descritte in sezione 3.2.
In modo simile a quanto realizzato in altri studi[37] l’ortopedico effettuerà
una prima valutazione sulla “personalità” della frattura esclusivamente sul
modello, che viene registrata e confrontata con quella compiuta dal radiologo
sulle immagini digitali.
Con l’ausilio del modello tridimensionale verrà deciso quale approccio
chirurgico sia più indicato (e.g. dimensione dell’opercolo osteotomico da
realizzare al fine di ricollocare in sede eventuali frammenti osteocondrali
affondati).
Verranno inoltre scelte la tipologia e le dimensioni della placca di sostegno
da posizionare, in relazione alla morfologia ossea riscontrata sul modello, e
la lunghezza delle viti da applicare.
Se possibile (a seconda della natura del materiale utilizzato), il modello
viene forato a mezzo di trapano elettrico per testare le migliori traiettorie,
evidenziate poi da un perno metallico sul modello, come osservato in [22].
L’intervento viene eseguito in accordo a procedure standard, utilizzando
i mezzi di sintesi selezionati nella fase di pianificazione pre-operatoria.
Se il modello è stato sterilizzato e introdotto in sala operatoria, se ne
registra il numero di utilizzi, e lo si confronta con quelli relativi agli altri
mezzi di imaging.
Si registrano il tempo complessivo dell’intervento chirurgico e la durata
globale della scopia intraoperatoria, oltre che la classe della frattura rilevata
nel riscontro intra-operatorio.
125
5.5
Fase 3: Questionario di Valutazione
In modo simile a quanto realizzato in [40] ci si proponde di realizzare un
modulo di valutazione per casi di frattura del piatto tibiale nel cui trattamento chirurgico sia stato impiegato un modello fisico stampato come quelli
realizzati in questo progetto.
Le domande previste si dividono in tre sezioni:
Fase pre-operatoria: tipologia di impiego; accordo con strumenti di
imaging tradizionale; utilizzo di strumenti chirurgici o prostetici nello
studio sul modello.
Fase operatoria: sterilizzazione e ricorso intra-operatorio al modello;
accordo con l’anatomia del paziente; influenza sul tempo totale.
Commenti a posteriori: utilità complessiva; costo complessivo; pro-
prietà più importanti del modello;
Lo si sottopone al chirurgo nella fase post-operatoria, con lo scopo di
valutare diversi aspetti dell’utilizzabilità dei modelli fisici nelle diverse fasi
dell’operazione chirurgica.
Un modulo preliminare è riportato nel seguito.
126
Sezione A: Fase Pre-Operatoria
A1: Quali di queste modalità di imaging sono state utilizzate?
X-Ray
2D TAC
3D TAC
2D RM
3D RM
A2: Che tipo di modello è stato utilizzato?
Simil-gesso
Resina opaca
Resina trasparente
A3: Quanto tempo prima dell’operazione è stato fornito il modello?
1-2 ore
3-4 ore
1 giorno
più di 1 giorno
Adeguata
Abbondante
A4: Come valuta la quantità di anticipo?
Troppo scarsa
Scarsa
A5: Come valuta la comprensione del caso attraverso il modello?
L’informazione necessaria era presente solo nelle immagini
L’informazione necessaria era più visibile nelle immagini
Nessuna differenza
L’informazione necessaria era più visibile nel modello
L’informazione necessaria era presente solo nel modello
A6: L’utilizzo del modello ha portato a una decisione differente:
Nella classificazione della frattura
Nel posizionamento del paziente
Nella scelta di materiali prostetici
Nella procedura da effettuare
A7: Come è stato utilizzato il modello fisico?
Visualizzazione a fini diagnostici
Illustrazione al paziente della procedura chirurgica
Illustrazione della procedura a membri del team chrirugico
Acquisizone di esperienza tattile
Simulazione del posizionamento delle viti
Simulazione dell’applicazione di una placca di sostegno
Valutazione dimensionale di strutture e/o strumenti
127
Sezione B: Fase Operatoria
B1: Come valuta la corrispondenza tra modello e struttura reale?
Differenti
Simili
Identici
B2: Come valuta l’utilità dell’esperienza tattile ottenuta sul modello
nella procedura chirurgica?
Fuorviante
Inutile
Utile
Molto utile
B3: Il modello è stato sterilizzato? Con quale tecnica?
Sı̀, tramite ..................................................
No
B4: Quante volte è stato utilizzato il modello nella fase operatoria?
0
1-2
3-5
6-10
10+
B5: Quante volte sono state utilizzate altre modalità nella fase opera-
toria?
0
1-2
3-5
6-10
10+
B6: Come valuta l’accuratezza del modello in confronto a quella richie-
sta per l’operazione?
Molto meno accurato del necessario
Meno accurato del necessario
Adeguato
Più accurato del necessario
Molto più accurato del necessario
B7: Come stima l’effetto che ha avuto il modello sul tempo totale
dell’operazione?
Riduzione
Aumento giustificato
128
Aumento ingiustificato
Sezione C: Risultati e commenti sul modello
C1: Come valuta l’utilità del modello nella buona riuscita dell’opera-
zione?
Fuorviante
Inutile
Utile
Molto utile
C2: Come stima l’effetto che ha avuto il modello sul costo totale
dell’operazione?
Riduzione
Aumento giustificato
Aumento ingiustificato
C3: Assegnare un valore di importanza da 1 (inutile) a 5 (fondamentale)
alle seguenti proprietà per l’utilizzo del modello:
Proprietà:
1
2
3
4
Consistenza
Colore
Trasparenza
Accuratezza
Sterilizzabilità
Prezzo
Anticipo nella consegna
C4: Per effettuare in futuro una procedura simile a questa, riutilizze-
rebbe un modello fisico?
Sı̀
No
C5: In che modo potrebbe essere migliorato il modello?
Risposta libera:
....................................................................................
....................................................................................
....................................................................................
....................................................................................
....................................................................................
129
5
5.6
Valutazioni Future sul Software
Le funzionalità della piattaforma software sviuppata per la fruizione del dato di segmentazione (una descrizione delle quali si trova al capitolo 3) sono
molteplici, ci si propone una valutazione futura di alcune di esse per l’applicazione nello studio clinico descritto, sfruttando il supporto dei radiologi
dell’E.O. Ospedali Galliera.
5.6.1
Valutazione della bontà della ricostruzione 3D
Lo step fondamentale per la generazione del modello tridimensionale nella
piattaforma sviluppata è la ricostruzione tramite Surface Rendering della segmentazione ottenuta. La mesh ottenuta è automaticamente e direttamente
convertita nel formato adatto alla stampa tridimensionale.
La pipeline utilizzata per permettere la visualizzazione è stata descritta
nella sezione 3.1.3.
Diversi parametri concorrono alla produzione di un buon risultato visivo, che integri efficacemente i difetti dovuti al campionamento discreto,
e contemporaneamente rispetti per quanto possibile le informazioni ‘reali’
dell’immagine medica.
Figura 5.3: Confronto tra ricostruzione di due immagini con spacing diverso.
5mm a sinista, 1,25mm a destra.
130
Spacing dell’immagine lungo la direzione di acquisizione. Maggiore
sarà la risoluzione lungo l’asse Z migliore sarà il risultato finale, ma
si allungheranno contemporanemante i tempi d’esame e la conseguente
esposizione a radiazioni ionizzanti per il paziente (vedi immagine 5.3).
Smoothing della mesh. A seconda della tecnica impiegata e della scel-
ta dei relativi parametri si bilancia un compromesso tra bontà della
visualizzazione finale e conservazione dell’informazione disponibile.
Valutare quali scelte di questi parametri siano ottimali per la regione
anatomica del ginocchio è una fase importante nell’applicazione del metodo
a casi clinici reali.
Vengono scelte diverse combinazioni di parametri per ogni tecnica di
smoothing implementata; il risultato del filtraggio delle segmentazioni delle
immagini acquisite con diversi spacing sarà mostrato a radiologi e ortopedici.
Una valutazione da 1 a 5 del risultato visivo è assegnata ad ogni modello
cosı̀ generato per i seguenti fattori:
Bontà visiva del risultato, ovvero assenza di artefatti dovuti all’acqui-
sizione.
Bontà anatomica del risultato, ovvero presenza delle feature anatomi-
che di piccole dimensioni rintracciabili nei dati e rispetto delle proporzioni originali.
I due valori cosı̀ ottenuti sono mediati assieme per ottenere lo score finale.
5.6.2
Usabilità del sistema di controllo LEAP Motion
Nella piattaforma sviluppata è presente un sistema di controllo ‘touchless’,
descritto in sezione 3.1.5.
Questo sistema è pensato per un possibile utilizzo intra-operatorio della
piattaforma di visualizzazione, e prevede la possibilità di ruotare e zoomare
131
la scena 3D tramite gesti, oltre che di scorrere le slice della visulizzazione
bidimensionale.
Si propone un esperimento per valutarne l’usabilità.
Posizionamento della scena 3D via LEAP Motion
Sarà presentata a cinque utenti una posa di una scena 3D, e sarà richiesto
di interagire tramite LEAP Motion per posizionarla in una seconda posa
predefinita mostrata affianco ad essa.
Questo procedimento sarà ripetuto per quattro scene di partenza differenti, con stessa posa di arrivo.
Rotazione semplice n°1 e zoom.
Rotazione semplice n°2 e zoom.
Rotazione complessa n°1 e zoom.
Rotazione complessa n°2 e zoom.
Verrà misurato il tempo di completamento del task per ogni casistica,
e sarà richiesto ad ogni utente di commentare l’esperienza di utilizzo ed i
problemi incontrati.
132
Capitolo 6
Conclusioni
La crescita esponenziale vissuta negli ultimi anni dal mercato delle stampanti
3D, riflessa nel drastico miglioramento delle tecnologie disponibili e nel contemporaneo abbassamento dei costi, ha creato possibilità applicative sempre
più ampie anche nel campo medicale.
L’obiettivo di questa tesi è stato quello di porre le basi per l’applicazione
delle tecniche di prototipazione rapida alla pianificazione pre-chirurgica in
ortopedia.
Per la realizzazione di questo progetto, si sono affrontate attività e problematiche diverse, ma intrecciate strettamente tra loro:
Sviluppo di algoritmi di segmentazione automatica e semi-automatica
per l’estrazione di regioni ossee da immagini TAC e RM.
Sviluppo di una piattaforma software, completa di interfaccia grafica,
per la segmentazione e la visualizzazione tridimensionale della struttura
anatomica d’interesse.
Sviluppo di funzionalità legate alla gestione del modello tridimensionale
e alla sua preparazione per la fase di stampa.
Analisi delle potenzialità delle diverse tecnologie di prototipazione ra-
pida nel campo della pianificazione pre-chirurgica, realizzazione di mo133
delli fisici preliminari, e collaborazione alla progettazione di uno studio
clinico pilota.
Gli sforzi compiuti su questi fronti hanno portato a risultati incoraggianti:
Le funzionalità di segmentazione semi-automatica di immagini TAC
integrate nella piattaforma risultano già mature per l’applicazione anche a casi patologici complessi con un tempo di raffinamento manuale
accettabile.
L’algoritmo automatico di segmentazione di immagini RM dimostra
buone potenzialità, e ben si presta alla futura generalizzazione su altre
regioni anatomiche.
La piattaforma software sviluppata rende possibile la gestione dell’in-
tero flusso di lavoro che parte dall’immagine grezza e porta al modello
tridimensionale pronto ad essere stampato, ed è stata utilizzata con
successo per la produzione di prototipi preliminari.
I prototipi preliminari stampati con le tecnologie considerate più pro-
mettenti dalle analisi effettuate, hanno ottenuto feedback decisamente
positivi da parte dei medici dell’E.O. Ospedali Galliera, tanto da rendere possibile la presentazione di una richiesta di finanziamento per uno
studio clinico pilota relativo alla pianificazione di interventi chirurgici
di riduzione di frattura del piatto tibiale.
Le indicazioni future dei medici dell’E.O. Ospedali Galliera e i risultati
dello studio clinico pilota saranno fondamentali per individuare la direzione
migliore da seguire nell’evoluzione del sistema esistente, sia dal lato del software che da quello dei materiali e delle tecnologie utilizzate per generare i
modelli fisici.
Si prevede l’arricchimento progressivo della piattaforma software grazie all’implementazione di nuove tecniche di segmentazione e all’evoluzione
di quelle presenti per permettere l’estrazione di altre aree anatomiche da
integrare nel modello finale.
134
L’innovazione continua che si registra negli ultimi anni nel campo dei materiali impiegabili nei processi di prototipazione rapida promette l’apertura
di nuove prospettive già nel prossimo futuro.
Le potenzialità di modelli multi-materiale, multi-colore, sempre più dettagliati e fedeli alla struttura anatomica originale sono vastissime e potranno
permettere in futuro simulazioni accurate di interventi chirurgici delicati.
La speranza è che questo lavoro contribuisca ad un processo di innovazione
che potrebbe rivoluzionare, anche in tempi brevi, la prassi ospedaliera della
pianificazione pre-chirurgica, portando miglioramenti sostanziali per medici
e pazienti.
135
Appendice A
Scelte Implementative
L’intera implementazione della piattaforma software sviluppata nel corso di
questo progetto è stata effettuata in linguaggio C++. Tre librerie sono state
particolarmente rilevanti per ottenere il risultato finale.
A.1
Elaborazione: la libreria ITK
Insight Segmentation and Registration Toolkit (ITK) è una libreria C++
open source e multipiattaforma che fornisce una suite di strumenti utili nel
campo dell’image processing.
Gli ambiti di applicazione maggiore sono quelli della registrazione e della
segmentazione di immagini mediche.
Nasce nel 1999 come progetto finanziato dalla ‘US National Library of
Medicine’. ITK si basa sul framework del ‘generic programming’, che la
rende forte di un’implementazone basata su template che rende immediata
l’applicazione di algoritmi a dati di tipi diversi e di diversa dimensionalità.
In questo progetto la libreria ITK è stata utilizzata intensivamente per
tutte le fasi di gestione delle immagini mediche, in modo particolare per l’importazione dei dati nei diversi formati, per lo sviluppo degli algoritmi di segmentazione, per la fase di registrazione delle immagini necessaria all’interno
136
dell’algoritmo di segmentazione basato su atlanti, e per diverse funzionalità
aggiuntive della piattaforma.
A.2
Visualizzazione: la libreria VTK
Visualization Toolkit (VTK) è una lbreria C++ open soruce e multipiattaforma, che fornisce un’estensiva suite di strumenti negli ambiti della Computer
Graphics e dell’Image Processing.
VTK nasce nel 1993 con la pubblicazione del libro The Visualization Toolkit: An Object-Oriented Approach to 3D Graphics, vede un rapido sviluppo
e diventa col passare degli anni sempre più impiegata in ambito medicale.
VTK è inoltre uno degli strumenti chiave della NA-MIC1 , progetto del
NIH2 per lo sviluppo di strumenti computazionali applicati alla ricerca medica.
Il facile scambio di dati con ITK l’ha resa un’ottima scelta per l’implementazione in questo progetto della parte di visualizzazione ed esportazione
del dato tridimensionale, cosı̀ come per la realizzazione di tutte le funzionalità
di interazione con la scena 3D.
A.3
Interfaccia: la libreria Qt
Qt è un toolkit multipiattaforma, di proprietà di Digia3 nato nel 1991 e giunto
ora alla quinta release, è disponibile in versione Open Source dal 2005.
Qt fornisce strumenti per lo sviluppo di programmi dotati di interfaccia
grafica, attraverso una libreria C++ e un generatore di codice chiamato ‘metaobject compiler’ (MOC) che permette una più semplice implementazione
di funzionalità non native in C++ tramite l’utilizzo di macro.
1
NA-MIC: National Alliance for Medical Image Computing, http://www.na-mic.org
NIH: National Institute of Health, http://www.nih.gov
3
Digia, società finlandese che ha acquisito Qt, precedentemente di proprietà di Nokia,
2
nel 2011, www.digia.com
137
La costruzione base dell’interfaccia si basa sull’integrazione di diversi widget; l’interazione con essi da parte dell’utente lancia segnali (‘signals’) contenenti informazioni sull’evento, raccolti da funzioni specificate dallo sviluppatore (‘slot’).
Questa libreria è stata utilizzata intensivamente per tutta la parte di
sviluppo dell’interfaccia grafica, e marginalmente nell’implementazione di
funzionalità aggiuntive come l’interazione ‘touchless’ tramite LEAP Motion.
La scelta dell’utilizzo di Qt è stata fortemente incentivata dalla possibilità
di integrare direttamente nel software sviluppato la finestra di visualizzazione
VTK, grazie a un widget predisposto alla comunicazione tra i due sistemi.
138
Elenco delle figure
2.1
Attraverso la fase di segmentazione, la zona d’interesse nell’immagine acquisita viene salvata in un’immagine binaria, nella
figura sovrapposta in rosso. . . . . . . . . . . . . . . . . . . .
2.2
9
Esempio di immagini sintetiche e relativi istogrammi; l’aggiunta progressiva di rumore da sinistra verso destra rende difficile
individuare le due classi attraverso l’analisi dell’istogramma. . 12
2.3
Esempio di sogliatura variabile; l’immagine sintetica è divisa
in 6 zone e segmentata in ognuna di esse separatamente. . . . 13
2.4
Applicazione di una sogliatura assoluta ad un immagine TAC
reale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.5
Applicazione di un algoritmo di region growing ad un immagine TAC reale, con posizionamento del seed evidenziato
dall’indicatore verde. . . . . . . . . . . . . . . . . . . . . . . . 15
2.6
2.7
Segmentazione di immagini problematiche utilizzando l’AC
descritto da Calder et al. in [10] . . . . . . . . . . . . . . . . 18
Separazione di ossa del piede contigue in [58] . . . . . . . . . . 19
2.8
Separazione di frammenti ossei in seguito a frattura del bacino
in [27] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.9
Fusione di immagini acquisite con sistemi di imaging diversi
(da sinistra verso destra: TAC, PET, fusione delle precedenti
tramite registrazione). . . . . . . . . . . . . . . . . . . . . . . 23
2.10 Schema del framework di registrazione. . . . . . . . . . . . . . 24
2.11 Trasformazione affine.
. . . . . . . . . . . . . . . . . . . . . . 26
139
2.12 Trasformazione libera. . . . . . . . . . . . . . . . . . . . . . . 26
2.13 Esempio di approccio basato su atlanti. (a) Atlante. (b) Registrazione dell’atlante con una trasformazione globale. (c)
Rifinitura locale della registrazione. (d) Risultato finale dopo
l’espansione del contorno con un algoritmo di tipo snake. . . . 33
2.14 Segmentazione preliminare.
. . . . . . . . . . . . . . . . . . . 38
2.15 Segmentazione a valle delle operazioni morfologiche. . . . . . . 39
2.16 Immagine originale. . . . . . . . . . . . . . . . . . . . . . . . . 41
2.17 Immagine della Likelihood basata sull’intensità. . . . . . . . . 42
2.18 Probabilità a priori basata sulla registrazione di atlanti. . . . . 43
2.19 Segmentazione risultante. . . . . . . . . . . . . . . . . . . . . . 44
3.1
Le tre fasi necessarie per la produzione di un modello 3D ad
uso medico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.2
Nella fase di visualizzazione, la segmentazione è convertita in
una mesh tridimensionale. . . . . . . . . . . . . . . . . . . . . 49
3.3
Volume Rendering di una TAC al ginocchio, da (a) a (c) sono
scartati voxel con intensità via via crescenti. . . . . . . . . . . 50
3.4
Schema della tecnica di Splatting. . . . . . . . . . . . . . . . . 51
3.5
Schema della tecnica di Ray Casting. . . . . . . . . . . . . . . 52
3.6
Esempio di Line Rendering. . . . . . . . . . . . . . . . . . . . 53
3.7
Le quindici configurazioni previste dall’algoritmo Marching
Cubes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.8
Confrontro tra il dato grezzo ottenuto tramite Marching Cubes, a sinistra, e dato raffinato dopo l’applicazione dei filtri
previsti nella piattaforma software sviluppata. . . . . . . . . . 56
3.9
Vista dell’interfaccia della piattaforma sviluppata, la segmentazione è visualizzata nella parte sinistra della schermata sovrapposta all’immagine originale, il risultato del surface rendering è mostrato nella parte destra della schermata, dove
l’utente può interagire con il modello 3D. . . . . . . . . . . . . 57
140
3.10 L’altezza della slice visualizzata è individuata a destra sul
modello 3D dal piano rosso. . . . . . . . . . . . . . . . . . . . 58
3.11 La periferica Leap Motion©. . . . . . . . . . . . . . . . . . . 61
3.12 Nella fase di stampa la mesh tridimensionale viene utilizzata
per produrre un modello fisico della struttura d’interesse. . . . 63
3.13 Stereolitografia: schema di funzionamento. . . . . . . . . . . . 65
3.14 Selective Laser Sintering: schema di funzionamento. . . . . . . 66
3.15 Fused Deposition Modeling: schema di funzionamento. . . . . 67
3.16 Inkjet Printing: schema di funzionamento. . . . . . . . . . . . 68
3.17 Stampa 3D dell’aorta di un paziente con aneurisma. . . . . . . 69
3.18 Visualizzazione e stampa 3D di frattura acetabolare.
. . . . . 70
3.19 Valutazione della discrepanza mandibolare su modello fisico. . 71
3.20 Studio del flusso di elio iperolarizzato in un modello realistico
di trachea. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
3.21 La Stampante ProJet360 di 3D Systems. . . . . . . . . . . . . 73
3.22 La Stampante Sla500 di 3D Systems. . . . . . . . . . . . . . . 75
4.1
Confronto tra immagini TAC di tibia sana, prima riga, e di
tibia fratturata, prima colonna . . . . . . . . . . . . . . . . . . 77
4.2
Segmentazione della parte terminale del femore e modello tridimensionale prodotto, visualizzati utilizzando il software sviluppato. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.3
Segmentazione problematica per esondazione della regione della tibia, e correzione della stessa. . . . . . . . . . . . . . . . . 80
4.4
Segmentazione della parte terminale del femore e modello tridimensionale prodotto, si nota l’imperfezione dovuta a una
zona di corticale ipointensa. . . . . . . . . . . . . . . . . . . . 81
4.5
Segmentazione della tibia in regioni con frammenti di osso corticale, nel modello tridimensionale il piano rosso si posiziona
all’altezza della slice visualizzata a sinistra. . . . . . . . . . . . 81
141
4.6
Aree di frattura problematiche per l’algoritmo di segmentazione. La simile intensità del tessuto osseo spongioso danneggiato e delle aree vuote causa il fallimento dell’identificazione
del corretto contorno nell’immagine a sinistra, e il fallimento
della creazione di un contorno chiuso nell’immagine a destra. . 82
4.7
Diversi esempi di problematiche comuni nella segmentazione
di immagini RM: presenza di artefatti nel primo riquadro da
sinistra, disomogeneità interne allo stesso tessuto nel secondo
riquadro da sinistra, scarso contrasto tra tessuti diversi, nel
terzo riquadro da sinistra. . . . . . . . . . . . . . . . . . . . . 84
4.8
N = 2, performance al variare di α . . . . . . . . . . . . . . . 88
4.9
N = 6, performance al variare di α . . . . . . . . . . . . . . . 89
4.10 N = 10, performance al variare di α . . . . . . . . . . . . . . . 89
4.11 N = 14, performance al variare di α . . . . . . . . . . . . . . . 90
4.12 α = 0.6, performance al variare di N . . . . . . . . . . . . . . 91
4.13 α = 0.7, performance al variare di N . . . . . . . . . . . . . . 91
4.14 α = 0.8, performance al variare di N . . . . . . . . . . . . . . 92
4.15 Confronto della performance sui rispettivi validation set per
le scelte di [α N] effettuate sui quattro fold di training. . . . . 93
4.16 Confronto della performance su sedici immagini, utilizzando i
quattro atlanti differenti con parametri ottimi scelti singolarmente per ognuno. . . . . . . . . . . . . . . . . . . . . . . . . 97
4.17 Confronto della performance sulle quattro immagini del test
set, utilizzando quattro atlanti differenti con parametri ottimi.
98
4.18 Segmentazione dell’immagine 27. . . . . . . . . . . . . . . . . 99
4.19 Aree problematiche dell’immagine 64. . . . . . . . . . . . . . . 100
4.20 Slice problematica dell’immagine 73. . . . . . . . . . . . . . . 101
4.21 Maschere scelte nel processo di registrazione per l’immagine
da segmentare. . . . . . . . . . . . . . . . . . . . . . . . . . . 104
4.22 Maschere scelte nel processo di registrazione per un’immagine
dell’atlante. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
142
4.23 Aree problematiche dell’immagine 64 nella prima colonna, segmentazione con registrazione complessiva per l’intera immagine nella seconda colonna e segmentazione con il nuovo processo di registrazione disaccoppiata per femore e tibia nella terza
colonna. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
4.24 Modelli tridimensionali prodotti dalla segmentazione dell’immagine scelta. Confronto di quello ottenuto con il nuovo metodo di registrazione e il precedente. . . . . . . . . . . . . . . . 106
4.25 Stampa di ginocchio sano, vista 1. Si notino i ponti fisici per
preservare le inter-distanze anatomiche tra i diversi segmenti
ossei. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
4.26 Stampa di ginocchio sano, vista 2. Si noti il foro di uscita della
polvere non curata, per rendere cavo il modello. . . . . . . . . 110
4.27 Stampa di tibia sana, vista 1. . . . . . . . . . . . . . . . . . . 112
4.28 Stampa di tibia fratturata, vista 2. . . . . . . . . . . . . . . . 113
4.29 Stampa di tibia fratturata, vista 3. . . . . . . . . . . . . . . . 114
4.30 Stampa di tibia fratturata in resina epossidica. Diverse viste. . 116
4.31 Stampa di tibia fratturata in resina epossidica verniciata. Dettagli. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
5.1
Esempi di utilizzo di modelli fisici in studi precedenti: per
testare le traiettorie delle viti in chirurgia spinale, (a), e per
sagomare le placche di sostegno in chirurgia maxillofacciale, (b).120
5.2
Classificazione delle fratture del piatto tibiale. . . . . . . . . . 123
5.3
Confronto tra ricostruzione di due immagini con spacing diverso. 5mm a sinista, 1,25mm a destra. . . . . . . . . . . . . . 130
143
Bibliografia
[1] Sufyan Y Ababneh and Metin N Gurcan. An efficient graph-cut segmentation for knee bone osteoarthritis medical images. In Electro/Information Technology (EIT), 2010 IEEE International Conference on,
pages 1–4. IEEE, 2010.
[2] Sufyan Y Ababneh, Jeff W Prescott, and Metin N Gurcan. Automatic
graph-cut based segmentation of bones from knee magnetic resonance
images for osteoarthritis research. Medical image analysis, 15(4):438–
448, 2011.
[3] Paul Aljabar, Rolf A Heckemann, Alexander Hammers, Joseph V Hajnal, and Daniel Rueckert. Multi-atlas based segmentation of brain
images:
atlas selection and its effect on accuracy.
Neuroimage,
46(3):726–738, 2009.
[4] Nachman Aronszajn. Theory of reproducing kernels. Transactions of
the American mathematical society, pages 337–404, 1950.
[5] Xabier Artaechevarria, Arrate Munoz-Barrutia, and Carlos Ortiz-de Solorzano. Combination strategies in multi-atlas image segmentation: Application to brain mr data. Medical Imaging, IEEE Transactions on,
28(8):1266–1277, 2009.
[6] Melih S Aslan, Asem Ali, Ham Rara, Ben Arnold, Aly A Farag, Rachid
Fahmi, and Ping Xiang. A novel 3d segmentation of vertebral bones
144
from volumetric ct images using graph cuts. In Advances in Visual
Computing, pages 519–528. Springer, 2009.
[7] Noor Badshah and Ke Chen. Image selective segmentation under geometrical constraints using an active contour approach. Communications
in Computational Physics, 7(4):759, 2010.
[8] Vaibhav Bagaria, Shirish Deshpande, Darshana D Rasalkar, Abhay Kuthe, and Bhawan K Paunipagar. Use of rapid prototyping and threedimensional reconstruction modeling in the management of complex
fractures. European journal of radiology, 80(3):814–820, 2011.
[9] Yuri Y Boykov and M-P Jolly. Interactive graph cuts for optimal boundary & region segmentation of objects in nd images. In Computer Vision,
2001. ICCV 2001. Proceedings. Eighth IEEE International Conference
on, volume 1, pages 105–112. IEEE, 2001.
[10] Jeff Calder, Amir M Tahmasebi, and Abdol-Reza Mansouri. A variational approach to bone segmentation in ct images. In SPIE Medical
Imaging, pages 79620B–79620B. International Society for Optics and
Photonics, 2011.
[11] PG Campbell and LE Weiss. Tissue engineering with the aid of inkjet
printers. Expert opinion on biological therapy, 7(8):1123–1127, 2007.
[12] Vicent Caselles, Ron Kimmel, and Guillermo Sapiro. Geodesic active
contours. International journal of computer vision, 22(1):61–79, 1997.
[13] Tony F Chan and Luminita A Vese. Active contours without edges.
Image Processing, IEEE Transactions on, 10(2):266–277, 2001.
[14] Timothy F. Cootes, Gareth J. Edwards, and Christopher J. Taylor. Active appearance models. Pattern Analysis and Machine Intelligence,
IEEE Transactions on, 23(6):681–685, 2001.
145
[15] Timothy F Cootes, Andrew Hill, Christopher J Taylor, and Jane Haslam. Use of active shape models for locating structures in medical
images. Image and vision computing, 12(6):355–365, 1994.
[16] Timothy F Cootes, Christopher J Taylor, David H Cooper, and Jim
Graham. Active shape models-their training and application. Computer
vision and image understanding, 61(1):38–59, 1995.
[17] Timothy F Cootes, Carole J Twining, Vladimir S Petrovic, Roy Schestowitz, and Christopher J Taylor. Groupwise construction of appearance
models using piece-wise affine deformations. In BMVC, volume 5, pages
879–888, 2005.
[18] Corinna Cortes and Vladimir Vapnik. Support vector machine. Machine
learning, 20(3):273–297, 1995.
[19] Ke-Rong Dai, Meng-Ning Yan, Zhen-An Zhu, and Yue-Hua Sun.
Computer-aided custom-made hemipelvic prosthesis used in extensive
pelvic lesions. The Journal of arthroplasty, 22(7):981–986, 2007.
[20] Pierre Dodin, Johanne Martel-Pelletier, Jean-Pierre Pelletier, and
François Abram. A fully automated human knee 3d mri bone segmentation using the ray casting technique. Medical & biological engineering
& computing, 49(12):1413–1424, 2011.
[21] Valérie Duay, Nawal Houhou, and J-P Thiran. Atlas-based segmentation
of medical images locally constrained by level sets. In Image Processing,
2005. ICIP 2005. IEEE International Conference on, volume 2, pages
II–1286. IEEE, 2005.
[22] Paul S D’Urso, Owen D Williamson, and Robert G Thompson. Biomodeling as an aid to spinal instrumentation. Spine, 30(24):2841–2845,
2005.
146
[23] Noha El Zehiry, Steve Xu, Prasanna Sahoo, and Adel Elmaghraby. Graph cut optimization for the mumford-shah model. In The Seventh IASTED International Conference on Visualization, Imaging and Image
Processing, pages 182–187. ACTA Press, 2007.
[24] Daren Lim Fat, Jim Kennedy, Rose Galvin, Fergal O’Brien, Frank
Mc Grath, and Hannan Mullett. The hounsfield value for cortical bone
geometry in the proximal humerus—an in vitro study. Skeletal radiology,
41(5):557–568, 2012.
[25] Pedro F Felzenszwalb and Daniel P Huttenlocher.
Efficient graph-
based image segmentation. International Journal of Computer Vision,
59(2):167–181, 2004.
[26] Jenny Folkesson, Erik B Dam, Ole Fogh Olsen, Paola C Pettersen, and
Claus Christiansen. Segmenting articular cartilage automatically using
a voxel classification approach. Medical Imaging, IEEE Transactions
on, 26(1):106–115, 2007.
[27] Jürgen Fornaro, Gábor Székely, and Matthias Harders. Semi-automatic
segmentation of fractured pelvic bones for surgical planning.
In
Biomedical Simulation, pages 82–89. Springer, 2010.
[28] Daniel Freedman and Tao Zhang. Interactive graph cut based segmentation with shape priors. In Computer Vision and Pattern Recognition,
2005. CVPR 2005. IEEE Computer Society Conference on, volume 1,
pages 755–762. IEEE, 2005.
[29] Jurgen Fripp, Stuart Crozier, Simon K Warfield, and Sebastien Ourselin. Automatic segmentation of the bone and extraction of the bone–
cartilage interface from magnetic resonance images of the knee. Physics
in Medicine and Biology, 52(6):1617, 2007.
[30] Jurgen Fripp, Stuart Crozier, Simon K Warfield, and Sébastien Ourselin. Automatic segmentation and quantitative analysis of the articular
147
cartilages from magnetic resonance images of the knee. Medical Imaging,
IEEE Transactions on, 29(1):55–64, 2010.
[31] Christian Gout, Carole Le Guyader, and Luminita Vese. Segmentation
under geometrical conditions using geodesic active contours and interpolation using level set methods. Numerical algorithms, 39(1-3):155–173,
2005.
[32] Joe Guarino, Steven Tennyson, Gary McCain, Laura Bond, Kevin Shea,
and Howard King. Rapid prototyping technology for surgeries of the
pediatric spine and pelvis: benefits analysis.
Journal of Pediatric
Orthopaedics, 27(8):955–960, 2007.
[33] Rolf A Heckemann, Joseph V Hajnal, Paul Aljabar, Daniel Rueckert,
and Alexander Hammers. Automatic anatomical brain mri segmentation combining label propagation and decision fusion. NeuroImage,
33(1):115–126, 2006.
[34] Tobias Heimann, Bryan J Morrison, Martin A Styner, Marc Niethammer, and Simon K Warfield. Segmentation of knee images: A grand
challenge. In Proc. MICCAI Workshop on Medical Image Analysis for
the Clinic, pages 207–214, 2010.
[35] Shoji Hirano and Yutaka Hata. Fuzzy expert system for foot ct image
segmentation. Image and Vision Computing, 19(4):207–216, 2001.
[36] Jia Hui Ho, Wen Zheng Lung, Chiao Luan Seah, Chueh Loo Poh, Kenneth Sheah, Denny Tjiauw Tjoen Lie, and Khye Soon Andy Yew. Anterior
cruciate ligament segmentation: Using morphological operations with
active contour. In Bioinformatics and Biomedical Engineering (iCBBE),
2010 4th International Conference on, pages 1–4. IEEE, 2010.
[37] C Hurson, A Tansey, B O’Donnchadha, P Nicholson, J Rice, and J McElwain. Rapid prototyping in the assessment, classification and preo-
148
perative planning of acetabular fractures. Injury, 38(10):1158–1162,
2007.
[38] Ivana Isgum, Marius Staring, Annemarieke Rutten, Mathias Prokop,
Max A Viergever, and Bram van Ginneken.
Multi-atlas-based seg-
mentation with local decision fusion—application to cardiac and aortic segmentation in ct scans. Medical Imaging, IEEE Transactions on,
28(7):1000–1010, 2009.
[39] Standard ISO. 11137, 1995. Sterilization of health care products — Requirements for validation and routine control — Radiation sterilization,
1995.
[40] Maree T Izatt, Paul LPJ Thorpe, Robert G Thompson, Paul S D’Urso, Clayton J Adam, John WS Earwaker, Robert D Labrom, and Geoffrey N Askin. The use of physical biomodelling in complex spinal surgery.
European Spine Journal, 16(9):1507–1518, 2007.
[41] He Jiankang, Li Dichen, Lu Bingheng, Wang Zhen, and Zhang Tao.
Custom fabrication of composite tibial hemi-knee joint combining cad/cae/cam techniques. Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine, 220(8):823–830,
2006.
[42] Dong Joong Kang. A fast and stable snake algorithm for medical images.
Pattern Recognition Letters, 20(5):507–512, 1999.
[43] Yan Kang, Klaus Engelke, and Willi A Kalender. A new accurate and
precise 3-d segmentation method for skeletal structures in volumetric ct
data. Medical Imaging, IEEE Transactions on, 22(5):586–598, 2003.
[44] Michael Kass, Andrew Witkin, and Demetri Terzopoulos. Snakes: Active contour models. INTERNATIONAL JOURNAL OF COMPUTER
VISION, 1(4):321–331, 1988.
149
[45] Michael S Kim, Adam R Hansgen, Onno Wink, Robert A Quaife, and
John D Carroll. Rapid prototyping a new tool in understanding and
treating structural heart disease. Circulation, 117(18):2388–2394, 2008.
[46] Toshikazu Kimura, Akio Morita, Kengo Nishimura, Hitoshi Aiyama, Hirotaka Itoh, Syunsuke Fukaya, Shigeo Sora, and Chikayuki Ochiai. Simulation of and training for cerebral aneurysm clipping with 3-dimensional
models. Neurosurgery, 65(4):719–726, 2009.
[47] Constantine Kotropoulos and Ioannis Pitas. Segmentation of ultrasonic images using support vector machines. Pattern Recognition Letters,
24(4):715–727, 2003.
[48] Haw-Chang Lan, Tsai-Rong Chang, Wen-Ching Liao, Yi-Nun Chung,
and Pau-Choo Chung. Knee mr image segmentation combining contextual constrained neural network and level set evolution. In Computational Intelligence in Bioinformatics and Computational Biology, 2009.
CIBCB’09. IEEE Symposium on, pages 271–277. IEEE, 2009.
[49] Zhiqiang Lao, Dinggang Shen, Dengfeng Liu, Abbas F Jawad, Elias R
Melhem, Lenore J Launer, R Nick Bryan, and Christos Davatzikos.
Computer-assisted segmentation of white matter lesions in 3d mr images using support vector machine. Academic radiology, 15(3):300–313,
2008.
[50] Der-Tsai Lee and Bruce J Schachter. Two algorithms for constructing a delaunay triangulation. International Journal of Computer &
Information Sciences, 9(3):219–242, 1980.
[51] Hansang Lee, Helen Hong, and Junmo Kim. Anterior cruciate ligament
segmentation from knee mr images using graph cuts with geometric and
probabilistic shape constraints. In Computer Vision–ACCV 2012, pages
305–315. Springer, 2013.
150
[52] M-Y Lee, C-C Chang, and YC Ku.
New layer-based imaging and
rapid prototyping techniques for computer-aided design and manufacture of custom dental restoration. Journal of Medical Engineering &
Technology, 32(1):83–90, 2008.
[53] Michael E Leventon, W Eric L Grimson, and Olivier Faugeras. Statistical shape influence in geodesic active contours. In Computer Vision and
Pattern Recognition, 2000. Proceedings. IEEE Conference on, volume 1,
pages 316–323. IEEE, 2000.
[54] Bing Li and Scott T Acton. Active contour external force using vector field convolution for image segmentation. Image Processing, IEEE
Transactions on, 16(8):2096–2106, 2007.
[55] Kang Li, Steven Millington, Xiaodong Wu, Danny Z Chen, and Milan
Sonka. Simultaneous segmentation of multiple closed surfaces using optimal graph searching. In Information Processing in Medical Imaging,
pages 406–417. Springer, 2005.
[56] Shengzhe Li, Xuenan Cui, Miao Yu, Hakil Kim, and Kyu-Sung Kwack.
Detecting and visualizing cartilage thickness without a shape model.
In Systems, Man, and Cybernetics (SMC), 2012 IEEE International
Conference on, pages 232–236. IEEE, 2012.
[57] Lixiong Liu, Qi Zhang, Min Wu, Wu Li, and Fei Shang. Adaptive segmentation of magnetic resonance images with intensity inhomogeneity
using level set method. Magnetic resonance imaging, 2013.
[58] Lu Liu, David Raber, David Nopachai, Paul Commean, David Sinacore,
Fred Prior, Robert Pless, and Tao Ju. Interactive separation of segmented bones in ct volumes using graph cut. In Medical Image Computing and Computer-Assisted Intervention–MICCAI 2008, pages 296–304.
Springer, 2008.
151
[59] William E Lorensen and Harvey E Cline. Marching cubes: A high resolution 3d surface construction algorithm. In ACM Siggraph Computer
Graphics, volume 21, pages 163–169. ACM, 1987.
[60] Liana M Lorigo, Olivier Faugeras, W Eric L Grimson, Renaud Keriven, and Ron Kikinis. Segmentation of bone in clinical knee mri using
texture-based geodesic active contours. In Medical Image Computing
and Computer-Assisted Interventation-MICCAI 1998, pages 1195–1204.
Springer, 1998.
[61] Jyrki MP Lötjönen, Robin Wolz, Juha R Koikkalainen, Lennart Thurfjell, Gunhild Waldemar, Hilkka Soininen, and Daniel Rueckert. Fast and
robust multi-atlas segmentation of brain magnetic resonance images.
NeuroImage, 49(3):2352–2365, 2010.
[62] Mehmet Emin Mavili, Halil Ibrahim Canter, Banu Saglam-Aydinatay,
Soner Kamaci, and Ilken Kocadereli. Use of three-dimensional medical
modeling methods for precise planning of orthognathic surgery. Journal
of Craniofacial Surgery, 18(4):740–747, 2007.
[63] Stanley Osher and James A Sethian. Fronts propagating with curvaturedependent speed: algorithms based on hamilton-jacobi formulations.
Journal of computational physics, 79(1):12–49, 1988.
[64] Wellingson Silva Paiva, Robson Amorim, Douglas Alexandre França
Bezerra, and Marcos Masini.
Aplication of the stereolithography
technique in complex spine surgery.
Arquivos de neuro-psiquiatria,
65(2B):443–445, 2007.
[65] Fabian Rengier, A Mehndiratta, Hendrik von Tengg-Kobligk, Christian M Zechmann, Roland Unterhinninghofen, H-U Kauczor, and Frederik L Giesel. 3d printing based on imaging data: review of medical
applications. International journal of computer assisted radiology and
surgery, 5(4):335–341, 2010.
152
[66] Torsten Rohlfing, Robert Brandt, Randolf Menzel, and Calvin R Maurer Jr. Evaluation of atlas selection strategies for atlas-based image segmentation with application to confocal microscopy images of bee brains.
NeuroImage, 21(4):1428–1442, 2004.
[67] Daniel Rueckert, Luke I Sonoda, Carmel Hayes, Derek LG Hill, Martin O Leach, and David J Hawkes. Nonrigid registration using free-form
deformations: application to breast mr images. Medical Imaging, IEEE
Transactions on, 18(8):712–721, 1999.
[68] Mert R Sabuncu, BT Thomas Yeo, Koen Van Leemput, Bruce Fischl,
and Polina Golland. A generative model for image segmentation based
on label fusion. Medical Imaging, IEEE Transactions on, 29(10):1714–
1729, 2010.
[69] J Schatzker. Fractures of the tibial plateau. In The rationale of operative
fracture care, pages 279–295. Springer, 1987.
[70] Heiko Seim, Dagmar Kainmueller, Hans Lamecker, Matthias Bindernagel, Jana Malinowski, and Stefan Zachow. Model-based autosegmentation of knee bones and cartilage in mri data. Proc. Medical
Image Analysis for the Clinic: A Grand Challenge. Bejing, China, pages
215–223, 2010.
[71] Liang Shan, Cecil Charles, and Marc Niethammer. Automatic multiatlas-based cartilage segmentation from knee mr images. In Biomedical Imaging (ISBI), 2012 9th IEEE International Symposium on, pages
1028–1031. IEEE, 2012.
[72] Jianbo Shi and Jitendra Malik. Normalized cuts and image segmentation. Pattern Analysis and Machine Intelligence, IEEE Transactions
on, 22(8):888–905, 2000.
[73] Hackjoon Shim, Samuel Chang, Cheng Tao, Jin-Hong Wang, C Kent
Kwoh, and Kyongtae T Bae. Knee cartilage: Efficient and reprodu153
cible segmentation on high-spatial-resolution mr images with the semiautomated graph-cut algorithm method1. Radiology, 251(2):548–556,
2009.
[74] Sekou Singare, Yaxiong Liu, Dichen Li, Bingheng Lu, Jue Wang, and Sanhu He. Individually prefabricated prosthesis for maxilla reconstruction.
Journal of Prosthodontics, 2007.
[75] Brian Stevens, Yanzhe Yang, Arunesh Mohandas, Brent Stucker, and
Kytai Truong Nguyen. A review of materials, fabrication methods, and
strategies used to enhance bone regeneration in engineered bone tissues.
Journal of Biomedical Materials Research Part B: Applied Biomaterials,
85(2):573–582, 2008.
[76] Hussain Z Tameem and Usha S Sinha. Automated image processing and
analysis of cartilage mri: enabling technology for data mining applied
to osteoarthritis. In AIP conference proceedings, volume 953, page 262.
NIH Public Access, 2007.
[77] Jose G Tamez-Pena, Joshua Farber, Patricia C Gonzalez, Edward
Schreyer, Erika Schneider, and Saara Totterman. Unsupervised segmentation and quantification of anatomical knee features: data from the
osteoarthritis initiative. Biomedical Engineering, IEEE Transactions on,
59(4):1177–1186, 2012.
[78] Hoang Vinh Tran and Danchi Jiang. Articular cartilage segmentation in
noisy mr images of human knee. In Biomedical Engineering Conference
(CIBEC), 2012 Cairo International, pages 146–149. IEEE, 2012.
[79] Phan TH Truc, Sungyoung Lee, and Tae-Seong Kim. A density distance augmented chan-vese active contour for ct bone segmentation. In
Engineering in Medicine and Biology Society, 2008. EMBS 2008. 30th
Annual International Conference of the IEEE, pages 482–485. IEEE,
2008.
154
[80] Phan Tran Ho Truc, Tae-Seong Kim, Sungyoung Lee, and YoungKoo Lee.
Homogeneity-and density distance-driven active contours
for medical image segmentation. Computers in Biology and Medicine,
41(5):292–301, 2011.
[81] Graham Vincent, Chris Wolstenholme, Ian Scott, and Mike Bowes. Fully
automatic segmentation of the knee joint using active appearance models. Medical Image Analysis for the Clinic: A Grand Challenge, pages
224–230, 2010.
[82] Jon D Wagner, Bret Baack, George A Brown, and James Kelly. Rapid 3dimensional prototyping for surgical repair of maxillofacial fractures: a
technical note. Journal of oral and maxillofacial surgery, 62(7):898–901,
2004.
[83] Hongzhi Wang, John B Pluta, Caryne Craige, Jung W Suh, Sandhitsu R Das, and Paul A Yushkevich. Multi-atlas segmentation with
joint label fusion. IEEE Transactions on Pattern Analysis and Machine
Intelligence, 35(3):611–623, 2013.
[84] Tomos G Williams, Graham Vincent, Mike Bowes, Tim Cootes, Sharon Balamoody, Charles Hutchinson, John C Waterton, and Christopher J Taylor. Automatic segmentation of bones and inter-image anatomical correspondence by volumetric statistical modelling of knee mri.
In Biomedical Imaging: From Nano to Macro, 2010 IEEE International
Symposium on, pages 432–435. IEEE, 2010.
[85] Zhenyu Wu and Richard Leahy. An optimal graph theoretic approach
to data clustering: Theory and its application to image segmentation. Pattern Analysis and Machine Intelligence, IEEE Transactions
on, 15(11):1101–1113, 1993.
[86] Gabriele Wurm, Berndt Tomancok, Peter Pogady, Kurt Holl, and Johannes Trenkler. Cerebrovascular stereolithographic biomodeling for aneu-
155
rysm surgery: technical note. Journal of neurosurgery, 100(1):139–145,
2004.
® PXL Core [Material Safety Data Sheet].
[88] ColorBond/zbond® 90 [Material Safety Data Sheet].
[87] VisiJet
[89] Yan Zhang, Bogdan J Matuszewski, L-K Shark, and Christopher J Moore. Medical image segmentation using new hybrid level-set method.
In BioMedical Visualization, 2008. MEDIVIS’08. Fifth International
Conference, pages 71–76. IEEE, 2008.
156
Ringraziamenti
Ringrazio il Prof. Alessandro Verri per avermi dato fiducia permettendomi
di intraprendere questo lavoro.
Ringrazio Matteo, Curzio, Mario, Sofia, Gabriele e tutto il team Camelot,
per l’aiuto paziente e l’importante esperienza di crescita personale e professionale che mi hanno fatto vivere.
Ringrazio la mia famiglia, mia sorella, mia madre e mio padre, che negli
anni sono stati sempre presenti nei momenti più difficili aiutandomi a superarli con successo, mia nonna, per la fiducia infinita nelle mie capacità e le
infinite candele accese prima degli esami(!), e tutti i parenti che mi sono stati
vicini con il loro affetto.
Grazie a Silvia per la forza che mi ha dato in questi anni, e per la pazienza
con cui in ogni situazione trova sempre il modo di farmi sorridere.
Grazie agli amici di sempre, vicini e lontani... troppi per citarvi tutti...
con voi ho condiviso studio, esami, pause alle macchinette, crisi esistenziali,
notti buttate, maratone, viaggi improvvisati e riflessioni mistiche.
Sono stati anni impegnativi, ma, grazie a tutti voi, bellissimi.
157