CALCOLO INTEGRALE
c
Paola
Gervasio - Analisi Matematica 1 - A.A. 16/17
Calcolo Integrale
cap9a.pdf
1
Calcolo Integrale
Dato un intervallo I ⊆ R, si affrontano due tipi di problematiche:
1. Integrazione indefinita.
Data f : I ⊆ R → R si vuole calcolare una funzione
F (x) : F ′ (x) = f (x), ovvero si vuole compiere l’operazione
inversa della derivazione
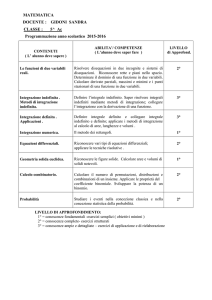
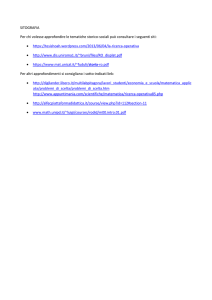
2. Integrazione definita.
Data f : I ⊆ R → R si vuole calcolare l’area della regione di
piano compresa tra il grafico della funzione f (x) e l’asse delle
ascisse per x ∈ I , come indicato in figura
y
c
Paola
Gervasio - Analisi Matematica 1 - A.A. 16/17
f (x)
I
x
Calcolo Integrale
cap9a.pdf
2
Integrazione indefinita
Definizione di primitiva.
Sia f : I ⊆ R → R.
Ogni funzione F derivabile in I e t.c.
F ′ (x) = f (x),
è detta primitiva di f in I .
∀x ∈ I
Def. Una funzione f che ammette una primitiva è detta integrabile
in senso indefinito.
Esempio. f (x) = cos(x), I = R.
La funzione F (x) = sin(x) è una primitiva di f in R, in quanto
F ′ (x) = D(sin(x)) = cos(x) = f (x), ∀x ∈ R.
Oss. Anche la funzione G (x) = sin(x) + 5 è una primitiva di f in R.
Una qualsiasi funzione del tipo F (x) = sin(x) + c, con c ∈ R è una
primitiva di f (x) = cos(x).
c
Paola
Gervasio - Analisi Matematica 1 - A.A. 16/17
Integrazione indefinita
cap9a.pdf
3
Teorema. Due primitive F (x) e G (x) della stessa funzione f (x)
sull’intervallo I possono differire solo per una costante, ovvero
G (x) − F (x) = c,
con c ∈ R.
Dim. Sia H(x) = G (x) − F (x). Se F e G sono due primitive, per
definizione sono derivabili e lo è anche la loro differenza, quindi H
è derivabile e H ′ (x) = G ′ (x) − F ′ (x) = f (x) − f (x) = 0. Per il
Teorema della derivata nulla allora H(x) è costante su I , ovvero
H(x) = G (x) − F (x) = c.
Corollario. Sia f : I ⊆ R → R integrabile in senso indefinito su I ,
sia F (x) una sua primitiva.
Allora tutte le primitive di f su I sono del tipo
F (x) + c,
c
Paola
Gervasio - Analisi Matematica 1 - A.A. 16/17
con c ∈ R
Integrazione indefinita
cap9a.pdf
4
Def. Indichiamo con
Z
f (x)dx l’insieme di tutte le primitive di f in
I , ovvero
Z
f (x)dx = {F (x) + c, c ∈ R, F una primitiva di f }.
Z
f (x)dx è detto integrale indefinito di f in dx.
Z
Esempio 1. cos(x)dx = sin(x) + c
Z
Z
Esempio 2. dx = 1dx = x + c
Z
Esempio 3. xdx =?
f (x) = x, cerco F (x) : F ′ (x) = x. Ricordo che ZD(x 2 ) = 2x, allora
1
x = 21 D(x 2 ) = D( 21 x 2 ). Ovvero F (x) = 12 x 2 e xdx = x 2 + c
2
c
Paola
Gervasio - Analisi Matematica 1 - A.A. 16/17
Integrazione indefinita
cap9a.pdf
5
In maniera analoga:
Z
Esempio 4. x 2 dx =?
f (x) = x 2 , cerco F (x) : F ′ (x) = x 2 .
1 3
1
3
2
2
Ricordo che D(x 3 ) = 3x
Z , allora x = 3 D(x ) = D( 3 x ).
1
Ovvero F (x) = 31 x 3 e x 2 dx = x 3 + c
3
Z
x n dx =
e più in generale
Z
x α dx =
1
x n+1 + c,
n+1
n ∈ Z \ {−1}
1
x α+1 + c,
α+1
α ∈ R \ {−1}
c
Paola
Gervasio - Analisi Matematica 1 - A.A. 16/17
Integrazione indefinita
cap9a.pdf
6
Z
Z
1
dx =?
x
f (x) = x1 , cerco F (x) : F ′ (x) = x1 .
Ricordo che D(log(x)) = x1 per x > 0 e D(log(−x)) =
x < 0, allora
Esempio 5.
Z
x
−1
dx =
1
dx = log(|x|) + c,
x
1
x
per
per x > 0 e x < 0
Ricordando le derivate delle funzioni elementari abbiamo:
Z
Z
sin(x)dx = − cos(x) + c
e x dx = e x + c
Z
Z
1
1
√
dx = arctan(x) + c
dx = arcsin(x) + c
2
1+x
1 − x2
c
Paola
Gervasio - Analisi Matematica 1 - A.A. 16/17
Integrazione indefinita
cap9a.pdf
7
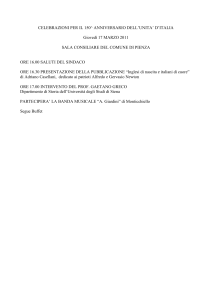
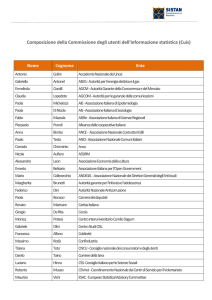
Esercizio 1. Calcolare la primitiva di f (x) = sin(x) che vale 5 in
x0 = π.
Z
Sappiamo che sin(x)dx = − cos(x) + c. Tra tutte le primitive,
cerco quella che vale 5 in x0 = π, ovvero − cos(π) + c = 5 .
Ottengo una equazione in cui l’incognita è c e la ricavo:
c = 5 + cos(π) = 5 − 1 = 4.
La primitiva cercata è allora F (x) = − cos(x) + 4.
7
7
6
6
5
5
4
4
3
3
2
2
1
1
0
0
−1
−1
−2
−3
−8
−2
−6
−4
−2
0
2
4
c
Paola
Gervasio - Analisi Matematica 1 - A.A. 16/17
6
8
−3
−8
−6
−4
Integrazione indefinita
−2
0
2
4
6
8
cap9a.pdf
8
Proprietà di linearità dell’integrale
Teorema
Siano f (x) e g (x) due funzioni integrabili (in senso indefinito) su
I . Allora, ∀α, β ∈ R, anche la funzione h(x) = αf (x) + βg (x) è
integrabile e si ha:
Z
Z
Z
(αf (x) + βg (x))dx = α f (x)dx + β g (x)dx
Z
5
)dx.
1 + x2
Z
Z
Z
Z
1
5
3
2
3
2
(4x + 2x −
)dx = 4 x dx + 2 x dx − 5
dx
2
1+x
1 + x2
1
1
= 4 x 4 + c1 + 2 x 3 + c2 − 5 arctan(x) + c3
4
3
2 3
4
= x + x − 5 arctan(x) + c
3
Oss. Si mette una sola costante per tutti gli integrali:
c = c1 + c2 + c3 .
Esempio. Calcolare
(4x 3 + 2x 2 −
c
Paola
Gervasio - Analisi Matematica 1 - A.A. 16/17
Integrazione indefinita
cap9a.pdf
9
Regola di integrazione per parti
Teorema. Siano f (x) e g (x) due funzioni derivabili su I . Se
f ′ (x)g (x) è integrabile su I , allora lo è anche f (x)g ′ (x) e
Z
Z
′
f (x)g (x)dx = f (x)g (x) − f (x)g ′ (x)dx
Z
Esempio. Calcolare log(x)dx.
Z
Z
Riscrivo log(x)dx = 1 · log(x)dx,
f ′ (x) = 1,
g (x) = log(x)
⇒
f (x) = x,
g ′ (x) =
1
x
Applicando la regola di integrazione per parti, si ha:
Z
Z
1
1 · log(x)dx = x log(x) − x dx = x log(x) − x + c
x
Z
log(x)dx = x log(x) − x + c
Quindi
c
Paola
Gervasio - Analisi Matematica 1 - A.A. 16/17
Integrazione indefinita
cap9a.pdf
10
Z
Esempio. Calcolare sin2 (x)dx.
Z
Z
2
Abbiamo: sin (x)dx = sin(x) · sin(x)dx.
f ′ (x) = sin(x), g (x) = sin(x) ⇒ f (x) = − cos(x), g ′ (x) = cos(x)
Applicando la formula di integrazione per parti abbiamo:
Z
Z
Z
2
′
sin (x)dx = f (x)g (x)dx = f (x)g (x) − f (x)g ′ (x)dx
Z
= − cos(x) sin(x) + cos2 (x)dx
Z
= − cos(x) sin(x) + (1 − sin2 (x))dx
Z
= − cos(x) sin(x) + x + c − sin2 (x)dx
Z
Da cui: 2 sin2 (x)dx = − cos(x) sin(x) + x + c
c
Paola
Gervasio - Analisi Matematica 1 - A.A. 16/17
Integrazione indefinita
cap9a.pdf
11
ovvero:
Z
1
sin2 (x)dx = (x − cos(x) sin(x)) + c
2
In maniera analoga si ha
Z
1
cos2 (x)dx = (x + cos(x) sin(x)) + c
2
c
Paola
Gervasio - Analisi Matematica 1 - A.A. 16/17
Integrazione indefinita
cap9a.pdf
12
Notazione di derivazione secondo Leibniz
Per denotare l’operazione di derivata, Leibniz usava la notazione
d
.
dx
dy
df (x)
=
Data y = f (x), si ha
f ′ (x) =
dx
dx
La notazione di Leibniz si presta ad essere interpretata come una
frazione, quindi dal primo e dall’ultimo termine dell’uguaglianza
scritta sopra si ha:
c
Paola
Gervasio - Analisi Matematica 1 - A.A. 16/17
dy = f ′ (x)dx
Integrazione indefinita
cap9a.pdf
13
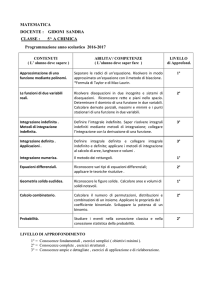
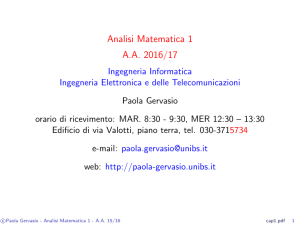
Regola di integrazione per sostituzione
Teorema. Sia ϕ(x), ϕ : I ⊆ R → J ⊆ R una funzione derivabile su
I . Sia f (y ), f : J → R una funzione integrabile su J e sia F (y )
una sua primitiva.
y
z
f (y )
J
y = ϕ(x)
x
I
J
y
Allora la funzione f (ϕ(x))ϕ′ (x) è integrabile su I e si ha:
Z
f (ϕ(x))ϕ′ (x)dx = F (ϕ(x)) + c
c
Paola
Gervasio - Analisi Matematica 1 - A.A. 16/17
Integrazione indefinita
cap9a.pdf
14
Esempio. Calcolare
Z
2
2xe x dx.
Dobbiamo individuare una funzioneR ϕ(x) e la sua derivata ϕ′ (x)
per poter scrivere l’integrale come f (ϕ(x))ϕ′ (x)dx.
Poniamo:
y
= ϕ(x) = x 2 ,
dy
= ϕ′ (x)dx = 2xdx.
Di conseguenza:
Z
2
2xe x dx
da cui
=
Z
=
Z
c
Paola
Gervasio - Analisi Matematica 1 - A.A. 16/17
dy
= ϕ′ (x) = 2x,
dx
2
e x 2xdx
| {z }
|{z}
ey
dy
y
2
e dy = e y + c = e x + c.
Integrazione indefinita
cap9a.pdf
15
Esempio. Calcolare
Z
tan(x)dx.
Anzitutto
osserviamo
che Z
Z
Z
1
sin(x)
dx =
sin(x)dx.
tan(x)dx =
cos(x)
cos(x)
Poniamo:
y
= ϕ(x) = cos(x),
dy
= ϕ′ (x)dx = −sin(x)dx.
Di conseguenza:
Z
1
sin(x)dx
cos(x)
da cui
=−
Z
=−
Z
c
Paola
Gervasio - Analisi Matematica 1 - A.A. 16/17
dy
= ϕ′ (x) = −sin(x),
dx
1
(− sin(x))dx
{z
}
cos(x) |
| {z }
dy
1/y
1
dy = − log |y | + c = − log | cos(x)| + c.
y
Integrazione indefinita
cap9a.pdf
16
Riferimento bibliografico
Canuto-Tabacco, cap. 9.1 e 9.2.
Esercizi:
n. 1 - 10 del cap. 9 del libro Canuto-Tabacco.
c
Paola
Gervasio - Analisi Matematica 1 - A.A. 16/17
Integrazione indefinita
cap9a.pdf
17