Guida tecnica n. 1
Controllo Diretto della Coppia
- la più avanzata tecnologia al mondo per gli azionamenti in c.a.
Indice
5
5
5
5
1
Introduzione ..............................................................
Generalità ....................................................................
Scopo di questo manuale ............................................
Utilizzo della Guida .....................................................
2
Evoluzione del Controllo Diretto della Coppia ....... 6
Cos'è un azionamento a velocità variabile? ................. 6
Riepilogo ..................................................................... 6
Azionamenti in c.c. ..................................................... 7
Caratteristiche ......................................................... 7
Vantaggi .................................................................. 7
Svantaggi ................................................................ 8
Azionamenti in c.a. - Introduzione ............................... 8
Azionamenti in c.a. - Controllo di frequenza
con la tecnologia PWM ............................................... 9
Caratteristiche ......................................................... 9
Vantaggi ................................................................. 10
Svantaggi ............................................................... 10
Azionamenti in c.a. - Controllo vettoriale
con la tecnologia PWM .............................................. 10
Caratteristiche ........................................................ 10
Vantaggi ................................................................. 11
Svantaggi ............................................................... 11
Azionamenti in c.a. - Controllo diretto della coppia .... 12
Variabili di controllo ................................................ 12
Confronto degli azionamenti a velocità variabile ........ 13
3
Domande e Risposte ................................................ 15
Generalità ................................................................... 15
Prestazioni ................................................................. 16
Funzionamento ........................................................... 22
4
Principi teorici alla base del controllo ................... 26
Come funziona la tecnologia DTC .............................. 26
Anello di controllo della coppia ................................... 27
Fase 1 Misure di tensione e di corrente ................. 27
Fase 2 Modello di motore adattivo ......................... 27
Fase 3 Comparatore di flusso e di coppia .............. 28
Fase 4 Selettore impulsi ottimali ............................ 28
Controllo di velocità .................................................... 29
Fase 5 Controllore del riferimento di coppia ........... 29
Fase 6 Controllore di velocità ................................. 29
Fase 7 Controllore del riferimento di flusso ............ 29
5
Indice alfabetico ....................................................... 30
4
Guida tecnica n.1 - Controllo Diretto della Coppia
Capitolo 1 - Introduzione
Generalità
Controllo Diretto della Coppia - o DTC - è la tecnologia degli
azionamenti in c.a. più avanzata al mondo.
Scopo di
questo
manuale
Scopo della presente Guida Tecnica è di descrivere cosa sia
la tecnologia DTC, perché e come si sia evoluta, i principi
teorici alla base del suo successo e le caratteristiche e i
vantaggi da essa offerti.
Sforzandosi di essere più pratica possibile, la presente guida
richiede una conoscenza base dei principi di controllo dei
motori in c.a.
Si rivolge principalmente a progettisti, compilatori di specifiche,
responsabili acquisti, OEM e utenti finali operanti in settori
quali il trattamento acque, l'industria chimica, la carta, la
generazione di energia, la movimentazione materiali, il
condizionamento e altri mercati.
Di fatto, chiunque utilizzi gli azionamenti a velocità variabile
(Variable Speed Drives, VSD) e desideri trarre vantaggio da
questa tecnologia, troverà molto utile consultare la presente
Guida Tecnica.
Utilizzo
della
Guida
La presente guida è stata realizzata per illustrare perché e
come si sia sviluppata la tecnologia DTC.
Per saperne di più in merito all'evoluzione degli azionamenti
dall'iniziale tecnologia in c.c., attraverso la tecnologia in c.a.
fino alla tecnologia DTC, consultare la guida a partire dalla
Capitolo 2 (pagina 6).
Per maggiori informazioni sulle prestazioni della tecnologia
DTC e sulle relative modalità di funzionamento e potenziale
applicativo, si rimanda invece alla Capitolo 3 (pagina 15),
Domande e Risposte.
Per una spiegazione dei principi teorici di controllo alla base
della tecnologia DTC, si rimanda a pagina 26.
Guida tecnica n.1 - Controllo Diretto della Coppia
5
Capitolo 2 - Evoluzione del Controllo Diretto della Coppia
Cos'è un
azionamento
a velocità
variabile?
Per trovare una risposta a questa domanda occorre innanzi
tutto comprendere che la funzione di base di un azionamento
a velocità variabile (Variable Speed Drive, VSD) è di controllare
il flusso di energia dalla rete al processo.
L'energia viene fornita al processo tramite l'albero motore. Lo
stato dell'albero motore è descritto da due grandezze fisiche,
la coppia e la velocità. Per controllare il flusso di energia occorre
quindi, in ultima analisi, controllare queste due grandezze.
Nella pratica è possibile controllare sia l'una che l'altra, e si
parlerà quindi, a seconda dei casi, di "controllo della coppia"
o di "controllo della velocità". Inoltre, quando un VSD funziona
nella modalità a controllo della coppia, quest'ultima dipende
dal carico.
Inizialmente, come azionamenti a velocità variabile si utilizzano
i motori in c.c. poiché consentivano di ottenere con facilità la
velocità e la coppia richieste, senza bisogno di ricorrere a
componenti elettronici sofisticati.
L'evoluzione tecnologica degli azionamenti a velocità variabile
in c.a. è stata dunque dettata dal desiderio di emulare le
eccellenti prestazioni dei motori in c.c., quali la rapida risposta
in coppia e la precisione in velocità, utilizzando al contempo i
motori in c.a., robusti, economici e praticamente privi di
manutenzione.
Riepilogo
In questa sezione prenderemo in
considerazione l'evoluzione della tecnologia
DTC, con particolare riferimento alle quattro
pietre miliari degli azionamenti a velocità
variabile, ovvero:
• Azionamenti per motori in c.c.
7
• Azionamenti in c.a., controllo di frequenza, PWM 9
• Azionamenti in c.a., controllo vettoriale, PWM
10
• Azionamenti in c.a., Controllo Diretto della Coppia 12
Prenderemo in esame ciascuno di questi argomenti, delineando
un quadro d'insieme che consenta di evidenziare le differenze
fondamentali tra l'uno e l'altro.
6
Guida tecnica n.1 - Controllo Diretto della Coppia
Evoluzione del Controllo Diretto della Coppia
Azionamenti
in c.c.
Azionamento in c.c.
Controllo
della
velocità
Controllo
della
coppia
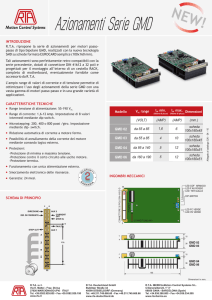
Figura 1: Anello di controllo di un azionamento per motori in c.c.
Caratteristiche
• Orientamento del campo tramite commutatore meccanico
• Le variabili di controllo sono la corrente di indotto e di
campo misurate DIRETTAMENTE sul motore
• Il controllo della coppia è diretto
In un motore in c.c., il campo magnetico è generato dalla
corrente che passa attraverso l'avvolgimento di campo dello
statore. Questo campo è sempre ad angolo retto rispetto al
campo creato dall'avvolgimento dell'indotto. Tale condizione,
nota come "orientamento del campo", risulta necessaria per
generare la coppia massima. Il complesso commutatorespazzole assicura che questa condizione venga sempre
mantenuta, indipendentemente dalla posizione del rotore.
Una volta raggiunto l'orientamento del campo, la coppia del
motore in c.c. risulta facilmente controllabile variando la corrente
d'indotto e mantenendo costante la corrente di
magnetizzazione.
Il vantaggio offerto dagli azionamenti in c.c. è che la velocità e
la coppia, i due parametri più importanti per il cliente, vengono
controllate direttamente tramite la corrente dell'indotto, dove la
coppia corrisponde all'anello di controllo interno, e la velocità a
quello esterno (vedere la Figura 1).
Vantaggi
• Controllo della coppia preciso e veloce
• Risposta dinamica alle variazioni di velocità
• Semplice da controllare
Inizialmente per il controllo della velocità variabile si utilizzavano
gli azionamenti in c.c. poiché garantivano buone prestazioni al
variare della coppia e della velocità, a fronte di un elevato grado
di precisione.
Guida tecnica n.1 - Controllo Diretto della Coppia
7
Evoluzione del Controllo Diretto della Coppia
Una macchina in c.c. è in grado di produrre una coppia con le
seguenti caratteristiche:
• Diretta - la coppia del motore è proporzionale alla corrente di
indotto: la coppia può essere quindi controllata direttamente
e con precisione.
• Rapida - il controllo di coppia è rapido; il sistema di
azionamento può assicurare una risposta in velocità altamente
dinamica. La coppia può essere modificata istantaneamente se
il motore viene alimentato da una sorgente di tipo idoneo.
Gli azionamenti alimentati in tensione sono caratterizzati da una
risposta rapida poiché quest'ultima dipende soltanto
dalla costante di tempo elettrica del rotore (cioè dall'induttanza
totale e dalla resistenza nel circuito d'indotto).
• Semplice - l'orientamento del campo si ottiene attraverso un
semplice dispositivo meccanico denominato complesso
commutatore-spazzole. Di conseguenza, non è necessario un circuito
di controllo elettronico che con la sua complessità contribuirebbe ad
accrescere i costi del controllore del motore.
Customer
Svantaggi
•
•
•
•
Ridotta affidabilità del motore Location
Manutenzione regolare
Application
Costi di acquistoEquipment
del motore Supplied
Necessità di un encoder per la retroazione
inconvenienti di questa tecnologia sono costituiti
How Iitprincipali
Works
dalla ridotta affidabilità del motore in c.c., dalla necessità di
una manutenzione regolare per spazzole e commutatori soggetti
a usura, dai costi di acquisto dei motori in c.c., e dalla necessità
di utilizzare un encoder per la retroazione di velocità e di
posizione.
Mentre un azionamento in c.c. produce una coppia facilmente
controllata da zero alla velocità di riferimento e oltre, la
meccanica del motore è molto più complessa e richiede una
manutenzione regolare.
Azionamenti
in c.a. Introduzione
•
•
•
•
•
•
Ridotte dimensioni
Robusti
Configurazione semplice
Leggeri e compatti
Ridotta manutenzione
Costi ridotti
L'evoluzione tecnologica degli azionamenti in c.a. è stata in
parte guidata dal desiderio di eguagliare le prestazioni degli
azionamenti in c.c., quali la rapida risposta in coppia e la
precisione in velocità, sfruttando al contempo i vantaggi
offerti dai motori standard in c.a.
8
Guida tecnica n.1 - Controllo Diretto della Coppia
Evoluzione del Controllo Diretto della Coppia
Azionamenti in
c.a. - Controllo
di frequenza
con la
tecnologia
PWM
Controllo in frequenza
Rif.
freq.
Rapp.
V/f
Modulatore
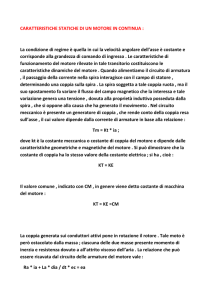
Figura 2: Anello di controllo di un azionamento in c.a. con la
tecnologia PWM
Caratteristiche
• Le variabili di controllo sono la tensione e la frequenza
• Simulazione della forma d'onda sinusoidale in c.a. tramite
modulatore
• Flusso ottenuto mantenendo costante il rapporto V/f
• Azionamento ad anello aperto
• La coppia è definita dal carico
Diversamente dagli azionamenti in c.c, quelli in c.a. utilizzano
come variabili di controllo i due parametri della tensione e della
frequenza, generati fuori dal motore.
I riferimenti di frequenza e di tensione vengono inviati a un
modulatore, che simula la forma d'onda sinusoidale
trasmettendola agli avvolgimenti statorici del motore. Questa
tecnologia, denominata di “modulazione dell'ampiezza degli
impulsi” (Pulse Width Modulation, PWM), sfrutta la presenza
di un raddrizzatore a diodi verso la rete e il fatto che la tensione
in c.c. intermedia sia mantenuta costante. L'inverter controlla
il motore mediante un treno di impulsi PWM, che contribuisce
a definire sia la tensione che la frequenza.
E' importante sottolineare che questo metodo non utilizza un
dispositivo di retroazione per acquisire le misure di velocità o
di posizione dall'albero del motore e trasmetterle all'anello di
controllo.
Una configurazione di questo tipo, priva di dispositivo di
retroazione, è denominata “azionamento ad anello aperto”.
Guida tecnica n.1 - Controllo Diretto della Coppia
9
Evoluzione del Controllo Diretto della Coppia
Vantaggi
• Costi ridotti
• Non occorre un dispositivo di retroazione - maggiore semplicità
Non essendovi un dispositivo di retroazione, il principio di
controllo consente di configurare una soluzione semplice ed
economica per il controllo dei motori a induzione in c.a.
Questo tipo di azionamento è idoneo per le applicazioni che
non richiedono elevati livelli di precisione, ad esempio pompe
e ventilatori.
Svantaggi
•
•
•
•
Non utilizza l'orientamento di campo
Lo stato del motore viene ignorato
La coppia non è controllata
Uso di un modulatore che introduce un ritardo
Questa tecnologia, denominata di "controllo scalare", non prevede
l'orientamento di campo del motore. Le principali variabili di
controllo, costituite dalla frequenza e dalla tensione, vengono
applicate agli avvolgimenti dello statore. Lo stato del rotore viene
ignorato - in altri termini, non vi è alcuna retroazione del segnale
di posizione o di velocità. Di conseguenza, la coppia non può
essere controllata con un determinato grado di precisione.
Inoltre, questa tecnologia utilizza un modulatore che di norma
contribuisce a rallentare la comunicazione dei segnali di
tensione e di frequenza in ingresso e che richiede al motore di
rispondere a questo segnale che varia.
Azionamenti
in c.a. Controllo
vettoriale con
la tecnologia
PWM
Controllo vettoriale
Controllo
della
velocità
Controllo
della
coppia
Modulatore
Figura 3: Anello di controllo vettoriale di un azionamento
in c.a. con tecnologia PWM
Caratteristiche
10
• Controllo dell'orientamento del campo con simulazione
dell'azionamento in c.c.
• Simulazione delle caratteristiche elettriche del motore nel
“modello del motore”
• Azionamento ad anello chiuso
• Controllo INDIRETTO della coppia
Guida tecnica n.1 - Controllo Diretto della Coppia
Evoluzione del Controllo Diretto della Coppia
Per simulare le condizioni operative di un motore in c.c. dal
punto di vista magnetico, ovvero per riprodurre il processo di
orientamento del campo, il vettore "flusso" dell'azionamento
deve conoscere la posizione angolare del flusso rotorico
all'interno del motore a induzione in c.a.
Negli azionamenti basati sulla tecnologia PWM e di controllo
vettoriale, l'orientamento del campo si ottiene per via elettronica,
e non meccanica, tramite il complesso commutatore-spazzole
del motore in c.c.
Le informazioni relative allo stato del rotore si ottengono
mediante retroazione da encoder della velocità e della posizione
angolare del rotore relativamente al campo statorico. Gli
azionamenti che utilizzano un encoder di velocità sono definiti
“ad anello chiuso”.
Inoltre, le caratteristiche elettriche del motore sono riprodotte
matematicamente con l'ausilio di un microprocessore preposto
alla rielaborazione dei dati.
Il controllore elettronico del vettore "flusso" crea grandezze
elettriche quali la tensione, la corrente e la frequenza (le variabili
controllate), e le trasmette al motore a induzione in c.a. tramite
un modulatore. Il controllo della coppia, quindi, è di tipo
INDIRETTO.
Vantaggi
•
•
•
•
Buona risposta alle variazioni della coppia
Preciso controllo della velocità
Coppia massima alla velocità zero
Prestazioni analoghe a quelle di un azionamento in c.c.
Il controllo vettoriale assicura la coppia massima alla velocità
zero, fornendo quindi prestazioni pressoché analoghe a quelle
di un azionamento in c.c.
Svantaggi
• Necessità di retroazione
• Costi elevati
• Necessità di un modulatore
Per ottenere un elevato livello di precisione nel controllo della
velocità e un'ottimale risposta al variare della coppia, si rende
necessario un dispositivo di retroazione. Questo può rivelarsi
costoso e contribuire ad accrescere la complessità di un
tradizionale motore a induzione in c.a., di norma semplice.
Inoltre, occorre utilizzare un modulatore che rallenta la
comunicazione dei segnali di tensione e di frequenza in ingresso,
e richiede al motore di rispondere a questo segnale variabile.
Benché il motore sia semplice dal punto di vista meccanico,
l'azionamento risulta piuttosto complesso dal punto di vista elettrico.
Guida tecnica n.1 - Controllo Diretto della Coppia
11
Evoluzione del Controllo Diretto della Coppia
Azionamenti
in c.a. Controllo
diretto della
coppia
Controllo diretto della coppia
Controllo
della
velocità
Controllo
della
coppia
Figura 4: Anello di controllo di un azionamento in c.a. con la
tecnologia DTC
Variabili di
controllo
Con la rivoluzionaria tecnologia DTC sviluppata da ABB,
l'orientamento del campo si ottiene senza retroazione,
utilizzando un'avanzata teoria che si basa su un modello
matematico del motore in c.a. capace di calcolarne la coppia
direttamente senza bisogno di modulazione. Le variabili
controllate sono il flusso di magnetizzazione e la coppia
del motore.
Con la tecnologia DTC non vi è alcun modulatore né necessità
di una tachimetrica o di un encoder per la retroazione della
velocità o della posizione dell'albero motore.
La tecnologia DTC utilizza il più veloce hardware di elaborazione
dei segnali digitali che sia disponibile e un modello matematico
avanzato con riferimento alle modalità di funzionamento del
motore stesso.
Il risultato è un azionamento con una risposta in coppia
generalmente dieci volte più veloce di un azionamento in c.a.
o in c.c. La precisione dinamica degli azionamenti DTC è otto
volte migliore di ogni altro azionamento in c.a. ad anello aperto
ed è analoga a quella di un azionamento in c.c. con retroazione.
La tecnologia DTC consente di configurare il primo azionamento
“universale” in grado di assicurare prestazioni analoghe a quelle
di un azionamento in c.a. o in c.c.
Le sezioni successive della presente guida si soffermano sulle
caratteristiche e sui vantaggi della tecnologia DTC.
12
Guida tecnica n.1 - Controllo Diretto della Coppia
Evoluzione del Controllo Diretto della Coppia
Confronto
degli
azionamenti a
velocità
variabile
Soffermiamoci ora sui seguenti diagrammi di controllo per
evidenziare alcune differenze.
Azionamenti in c.c.
Controllo
Controllo
di
di
velocità
coppia
Controllo di frequenza
Rif. di
frequenza
Figura 1: Anello di controllo di
un azionamento in c.c.
Controllo vettoriale
Controllo
di
velocità
Controllo
di
coppia
Modulatore
Figura 3: Anello di controllo
vettoriale
Rapporto
V/f
Modulatore
Figura 2: Anello di controllo
in frequenza
Controllo diretto della coppia DTC
Controllo
di
velocità
Controllo
di
coppia
Figura 4: Anello di controllo
di un azionamento DTC
La prima osservazione da fare riguarda l'analogia tra lo schema
di controllo degli azionamenti in c.c. (Figura 1) e quello della
tecnologia DTC (Figura 4).
Entrambi utilizzano i parametri del motore per controllare
direttamente la coppia.
La tecnologia DTC presenta tuttavia maggiori vantaggi quale
ad esempio il fatto di non utilizzare un dispositivo di retroazione,
oltre che tutti i vantaggi tipici dei motori in c.a. (vedere pagina
8) e il fatto di non richiedere eccitazione esterna.
AZIONAMENTO VARIABILI DI CONTROLLO
Corrente di indotto, IA
Azionamenti in c.c. Corrente di magnetizzazione,
IM
Azionamenti in
c.a. (PWM)
Tensione di uscita, U
Frequenza di uscita, f
Controllo diretto
della coppia
Coppiamotore,T
Flusso di magnetizzazione,
Tabella 1: Confronto delle variabili di controllo
Guida tecnica n.1 - Controllo Diretto della Coppia
13
Evoluzione del Controllo Diretto della Coppia
Come si può vedere dalla Tabella 1, sia gli azionamenti in c.c.
che gli azionamenti DTC utilizzano i parametri effettivi del
motore per controllare coppia e velocità. Di conseguenza, le
prestazioni dinamiche sono rapide e ottimali. Con la tecnologia
DTC, inoltre, nella maggior parte delle applicazioni non
occorrono una tachimetrica o un encoder per la retroazione
del segnale di velocità o di posizione.
Dal confronto della tecnologia DTC (Figura 4) con gli altri due
schemi di controllo degli azionamenti in c.a. (Figure 2 e 3) si
evidenziano numerose differenze, la principale delle quali
riguarda il fatto che la tecnologia DTC non richiede un
modulatore.
Nel caso degli azionamenti in c.a. basati sulla tecnologia PWM,
le variabili di controllo sono la frequenza e la tensione, che
devono passare attraverso diversi stadi prima di essere
applicate al motore. Nel caso degli azionamenti PWM, il
controllo viene dunque gestito all'interno del controllore
elettronico, e non all'interno del motore.
14
Guida tecnica n.1 - Controllo Diretto della Coppia
Capitolo 3 - Domande e Risposte
Generalità
Cos'è il controllo diretto della coppia?
Il controllo diretto della coppia (Direct Torque Contro, DTC) è la più
recente tecnologia applicata agli azionamenti in c.a. sviluppata
da ABB, destinata nel prossimo futuro a prendere il posto dei
tradizionali azionamenti PWM ad anello aperto e chiuso.
Perché è denominato "controllo diretto della coppia"?
Il termine "controllo diretto della coppia" si riferisce al fatto che
il controllo della coppia e della velocità si basano direttamente
sullo stato elettromagnetico del motore, analogamente ai motori
in c.c., ma diversamente dalle modalità d'uso della frequenza
d'ingresso e della tensione da parte dei tradizionali azionamenti
PWM. DTC è la prima tecnologia che “realmente” controlla le
due variabili del motore "coppia" e "flusso".
Qual è il vantaggio di tutto ciò?
Poiché la coppia e il flusso sono i parametri del motore che
vengono controllati direttamente, non è necessario utilizzare
un modulatore, come nella tecnologia PWM, per controllare la
frequenza e la tensione. Questo, di fatto, contribuisce a
eliminare molti problemi, e accelera la risposta dinamica
dell'azionamento al variare della coppia. La tecnologia DTC
inoltre garantisce un accurato controllo della coppia senza un
dispositivo di retroazione.
Perché occorre una nuova tecnologia per gli
azionamenti in c.a.?
DTC non è semplicemente un'altra tecnologia per gli azionamenti
in c.a. L'industria presenta esigenze sempre più complesse e
l'attuale tecnologia degli azionamenti in c.a. non è in grado di
soddisfarle tutte.
Chi ha inventato la tecnologia DTC:
• Una migliore qualità del prodotto che può essere ottenuta
anche con un migliore controllo della velocità e un più rapido
controllo della coppia.
• Tempi di fermo ridotti, ovvero azionamenti che non
presentino blocchi intempestivi, che non siano resi più
complessi da dispositivi di retroazione, e che risultino il più
possibile immuni da interferenze quali armoniche e radiofrequenze.
• Riduzione del numero di prodotti. Un unico azionamento che
sia in grado di soddisfare tutte le esigenze applicative,
indipendentemente dal fatto che si tratti di azionamenit in c.a.,
in c.c. o di servoazionamenti. Ecco cosa si intende con il termine
"azionamento universale".
• Un ambiente di lavoro confortevole, con un azionamento
che generi il minor livello possibile di rumore percettibile.
Guida tecnica n.1 - Controllo Diretto della Coppia
15
Domande e Risposte
Queste sono solo alcune delle esigenze espresse dall'industria.
La tecnologia DTC può offrire soluzioni a tutte queste esigenze,
oltre che apportare ulteriori vantaggi a molte applicazioni
standard.
Chi ha inventato la tecnologia DTC?
ABB ha condotto attività di ricerca nel campo della tecnologia
DTC fin dal 1988 succesivamente alla pubblicazione della teoria
avvenuta nel 1971 e nel 1985 ad opera dell'ingegnere tedesco
Blaschke e del collega Depenbrock. La tecnologia DTC si basa
sulla teoria del controllo orientato del campo delle macchine a
induzione e sulla teoria dell'autocontrollo diretto. ABB ha dedicato
più di 100 anni-uomo allo sviluppo di questa tecnologia e alla
sua industrializzazione.
Prestazioni
Quali sono i principali vantaggi della tecnologia DTC rispetto
alla tradizionale tecnologia degli azionamenti in c.a.?
La tecnologia DTC offre numerosi vantaggi. L'aspetto più significativo
riguarda il fatto che gli azionamenti basati sulla tecnologia DTC
presentano le seguenti eccezionali prestazioni dinamiche, per lo più
senza necessità di un encoder o tachimetrica per tenere sotto controllo
la posizione o la velocità dell'albero:
• Risposta in coppia: - Con quale rapidità l'uscita
dell'azionamento può raggiungere il valore specificato nel
momento in cui viene applicata una variazione del riferimento
di coppia nominale del 100%?
Nel caso della tecnologia DTC, una tipica risposta in coppia va
da 1 a 2 ms al di sotto di 40 Hz, rispetto ai 10-20 ms degli
azionamenti in c.c. e vettoriali con encoder. Negli azionamenti
PWM ad anello aperto (vedere pagina 9), il tempo di risposta è
di norma ben superiore a 100 ms. In effetti, con la sua risposta
in coppia, la tecnologia DTC si è spinta fino al limite naturale. A
fronte della tensione e della corrente disponibili, il tempo di
risposta non potrebbe essere inferiore. Anche negli azionamenti
“senza sensori” di tipo più avanzato, la risposta in coppia è pari
a centinaia di millisecondi.
• Accurato controllo della coppia alle basse frequenze, unitamente
alla coppia di carico massimo alla velocità zero, senza la necessità
di un dispositivo di retroazione come un encoder o una tachimetrica.
Con la tecnologia DTC, la velocità può essere controllata fino a
frequenze inferiori a 0,5 Hz assicurando comunque il 100% della
coppia fino alla velocità zero.
• Ripetibilità della coppia: - Con quale precisione
l'azionamento ripete la coppia di uscita a fronte di uno stesso
segnale di riferimento in coppia?
La tecnologia DTC senza encoder può assicurare una ripetibilità
dell'1-2% della coppia nominale sull'intero campo di velocità. Questo
valore è pari a circa la metà degli altri azionamenti in c.a. ad anello
aperto e uguale alla ripetibilità di un azionamento in c.a o in c.c. ad
anello chiuso.
16
Guida tecnica n.1 - Controllo Diretto della Coppia
Domande e Risposte
• Precisione statica in velocità: - Errore tra il riferimento di
velocità e il valore effettivo in presenza di un carico costante.
Nel caso della tecnologia DTC, la precisione in velocità è pari al
10% dello scorrimento del motore. Con riferimento a un motore da
11 kW, questo equivale a una precisione statica in velocità pari
a 0,3%. In un motore da 110 kW, la precisione in velocità è pari
a 0,1% senza encoder (anello aperto). Questa precisione soddisfa
i requisiti di precisione del 95% delle applicazioni industriali basate
sull'impiego di azionamenti. Per ottenere lo stesso grado di
precisione con un azionamento in c.c. si rende invece necessario
l'impiego di un encoder.
Per contro, negli azionamenti PWM con controllo della frequenza,
la precisione statica in velocità è compresa tra 1 e 3%. L'uso di
azionamenti standard basati sulla tecnologia DTC consente
dunque di ottenere significativi miglioramenti nel processo del
cliente.
Un azionamento DTC che utilizza un encoder da 1024 impulsi/
giro può raggiungere una precisione in velocità dello 0,01%.
• Precisione dinamica in velocità: - Integrale della variazione
di velocità quando viene applicata la coppia (100%) nominale.
La precisione dinamica in velocità della tecnologia DTC ad
anello aperto è compresa tra 0,3 e 0,4% secondi. Questo
valore dipende dalla regolazione del guadagno del regolatore,
che può essere tarato in funzione dei requisiti del processo.
Nel caso degli altri azionamenti in c.a. ad anello aperto, la
precisione dinamica è otto volte inferiore, attestandosi in
pratica attorno a 3% secondi. Equipaggiando l'azionamento
DTC con un encoder, la precisione dinamica in velocità risulta
pari a 0,1% secondi, ovvero un valore prossimo alle
prestazioni di un servoazionamento.
Quali sono i vantaggi pratici di queste prestazioni?
• Elevata risposta in coppia: - Questo riduce in modo
considerevole le cadute di velocità durante i transitori del
carico, migliorando il controllo del processo e la qualità del
prodotto.
• Controllo della coppia alle basse frequenze: - Questo
aspetto è particolarmente importante per le gru e gli ascensori,
dove il carico dev'essere avviato e fermato regolarmente
senza strappi. Anche per gli avvolgitori, la tensione può essere
controllata da zero alla velocità massima. Rispetto agli
azionamenti vettoriali PWM, la tecnologia DTC consente di
ridurre i costi poiché non necessità di tachimetrica.
• Linearità della coppia: - Questo aspetto è importante nelle
applicazioni di precisione quali gli avvolgitori utilizzati nel
settore delle cartiere, dove la precisione e la regolarità delle
funzioni di avvolgimento riveste un'importanza fondamentale.
Guida tecnica n.1 - Controllo Diretto della Coppia
17
Domande e Risposte
• Precisione dinamica in velocità: - In caso di improvvise
variazioni del carico, il motore è in grado di tornare a uno stato
di stabilità in tempi eccezionalmente rapidi.
CARATTERISTICA RISULTATO
BENEFICIO
Buona precisione in
velocità senza
tachimetrica
Consente di controllare la
velocità con una
precisione superiore allo
0,5%. Nel 95% delle
applicazioni non occorre
una tachimetrica.
Risparmio sui costi di
investimento. Maggiore
affidabilità. Migliore
controllo del processo.
Migliore qualità del
prodotto. Verso un
azionamento davvero
"universale".
Eccezionale controllo
della coppia senza
tachimetrica.
Azionamento per
applicazioni complesse.
Assicura la coppia
necessaria in ogni
momento. Ripetibilità
della coppia pari all'1%.
Tempo di risposta in
coppia inferiore a 5 ms.
Prestazioni simili a
quelle della tecnologia
in c.c. ma senza
tachimetrica. Ridotti
guasti meccanici ai
macchinari. Riduzione
dei tempi di fermo e
degli investimenti.
Coppia massima alla
velocità zero con o
senza tachimetrica/
encoder.
Non occorre un freno
meccanico. Transizione
dolce tra azionamento e
freno. Consente di utilizzare
l'azionamento nelle
applicazioni
tradizionalmente riservate
agli azionamenti in c.c.
Riduzione dei costi
d'investimento. Migliore
controllo sul carico.
Possibilità di utilizzare
un azionamento in c.a. e
un motore al posto della
tecnologia in c.c.
Utilizzare un motore in
c.a. standard significa
ridurre i requisiti di
manutenzione e i costi.
Controllo fino alla
velocità zero e controllo
di posizione con
encoder.
Prestazioni di livello
analogo a quelle dei
servoazionamenti.
Azionamento
economico ad elevate
prestazioni; assicura il
controllo di posizione e
una migliore precisione
statica. Controllo di
precisione con motori in
c.a. standard.
Tabella 2: Caratteristiche e vantaggi in termini di prestazioni
dinamiche offerte dalla tecnologia DTC
Oltre alle eccellenti prestazioni dinamiche, quali sono gli
altri vantaggi della tecnologia degli azionamenti DTC?
Vi sono numerosi altri vantaggi. Ad esempio, gli azionamenti
DTC non necessitano di tachimetrica o encoder per tenere
sotto controllo la velocità o la posizione dell'albero del motore
per ottenere una rapidissima risposta in coppia anche da un
azionamento in c.a. Questo consente di risparmiare sui costi
iniziali.
18
Guida tecnica n.1 - Controllo Diretto della Coppia
Domande e Risposte
CARATTERISTICA RISULTATO
BENEFICIO
Rapido controllo
della tensione sul
collegamento in c.c.
Autoalimentazione in
mancanza di rete.
L'azionamento non va
in blocco. Riduzione dei
tempi di fermo. Meno
interruzioni nel
processo = risparmio.
Avvio automatico
(Riavviamento
diretto).
Avvio in presenza
dell'induttanza residua
del motore. Nessun
ritardo all'avviamento.
Avvio con motore in
marcia senza attendere
la riduzione del flusso.
Trasferisce il moto dalla
linea all'azionamento.
Nessun riavviamento né
interruzioni del
processo.
Avviamento
automatico
(Riavviamento al
volo).
Sincronizzato con la
rotazione del motore.
Nessuna interruzione
del processo.
Rallentamento dolce
delle macchine.
Ripristina il controllo in
ogni situazione.
Flusso di frenatura.
Frenatura controllata
tra due velocità.
Costi di investimento
ridotti. Migliore
controllo del processo.
Nessun ritardo come
nella frenatura in c.c.
Decelerazione a
velocità diverse da
zero. Ridotta necessità
di chopper e
resistenza di frenatura.
Ottimizzazione del
flusso.
Ridotte perdite e
rumorosità del motore.
Motore controllato al
meglio.
Routine di
identificazione/
Autotuning.
Sintonizza il motore
con l'azionamento per
ottimizzare le
prestazioni.
Facile e accurata messa
a punto. Non occorre
regolare parametri.
Tempo di avviamento
ridotto. Coppia di
spunto garantita. Facile
retrofit per qualsiasi
sistema in c.a.
Senza schema di
commutazione
predeterminato dei
dispositivi di
potenza.
Bassa rumorosità.
Nessuna portante
fissa, quindi
rumorosità ridotta
grazie allo spettro di
rumore “bianco”.
Costi ridotti delle
barriere isolanti per le
applicazioni in cui il
rumore è importante.
Sollecitazioni ridotte per
ingranaggi, pompe e
ventilatori.
Nessun limite in
termini di velocità di
accelerazione e
decelerazione.
Rapide accelerazioni e
decelerazioni senza
limitazioni meccaniche.
Migliore controllo del
processo e migliore
qualità del prodotto.
Tabella 3: Caratteristiche e benefici della tecnologia DTC
Guida tecnica n.1 - Controllo Diretto della Coppia
19
Domande e Risposte
Inoltre, un azionamento DTC è caratterizzato da un rapido avvio,
a prescindere dallo stato elettromagnetico e meccanico del motore.
Il motore può essere avviato immediatamente, senza ritardo.
Sembra che gli azionamenti DTC siano i più vantaggiosi
per le applicazioni più complesse o che richiedono alte
prestazioni. Ma quali sono i vantaggi che la tecnologia
DTC apporta agli azionamenti standard?
Le applicazioni standard riguardano il 70% di tutti gli
azionamenti a velocità variabile installati nell'industria. Due delle
applicazioni più diffuse sono quelle di ventilatori e pompe in
settori quali il riscaldamento, la ventilazione e il
condizionamento aria (HVAC), il trattamento acque e il settore
alimentare.
In queste applicazioni, la tecnologia DTC offre una valida
soluzione a problemi quali le armoniche e la rumorosità.
Ad esempio, la tecnologia DTC può assicurare il controllo dello
stato di generazione della linea di ingresso dell'azionamento,
dove un ponte di tipo controllato può sostituire il ponte a diodi
di tipo convenzionale.
Questo significa che con il ponte di ingresso controllato basato
sulla tecnologia DTC si possono ridurre significativamente le
armoniche. Il basso livello di distorsione di corrente che
caratterizza il ponte controllato della tecnologia DTC è inferiore
a quello delle configurazioni a 6 o 12 impulsi di tipo
convenzionale, a fronte di un fattore di potenza che può arrivare
fino a 0.99.
Nelle applicazioni standard, gli azionamenti DTC sono in grado
di tollerare senza problemi il notevole e improvviso aumento
della coppia (carico) causato da rapidi cambiamenti nel
processo, senza scattare per sovratensione o sovracorrente.
Inoltre, in caso di mancanza di tensione di breve durata,
l'azionamento deve restare attivo. La tensione sul collegamento
in c.c. non deve diminuire al di sotto del livello minimo di
controllo dell'80%. A questo scopo, la tecnologia DTC prevede
un ciclo di controllo di 25 microsecondi.
Qual è l'impatto della tecnologia DTC sul controllo delle
pompe?
La tecnologia DTC presenta vantaggi nell'impiego con qualsiasi
tipo di pompa. Poiché consente di realizzare un azionamento
di tipo universale, con un'unica configurazione di azionamento
si possono controllare tutte le pompe, indipendentemente dalla
rispettiva tipologia (centrifuga o a coppia costante come le
pompe a vite), così come areatori e convogliatori. La tecnologia
DTC consente l'autoregolazione dell'azionamento al variare
delle necessità dell'applicazione.
20
Guida tecnica n.1 - Controllo Diretto della Coppia
Domande e Risposte
Ad esempio, nel caso delle pompe a vite, un azionamento
basato sulla tecnologia DTC è in grado di adattarsi per garantire
una coppia di spunto sufficiente per un avvio garantito.
L'autoalimentazione in mancanza di rete contribuisce a
ottimizzare la disponibilità delle funzioni di pompaggio in caso
di mancanza dell'alimentazione di breve durata.
La funzionalità di controllo di coppia intrinseca nella tecnologia
DTC consente di limitare la coppia per evitare sollecitazioni
meccaniche sulle pompe e sui condotti.
Qual è l'impatto della tecnologia DTC sul risparmio
energetico?
Una caratteristica della tecnologia DTC che contribuisce a
ottimizzare il rendimento energetico è la cosiddetta
ottimizzazione del flusso del motore.
Grazie a questa funzionalità, il rendimento dell'azionamento
globale (cioè il controllore e il motore) risulta notevolmente
ottimizzato nelle applicazioni con ventilatori e pompe.
Ad esempio, a fronte di un carico del 25% si ottiene un'ottimizzazione
del rendimento energetico globale fino al 10%. In presenza di un
carico del 50%, il miglioramento globlale in termini di rendimento può
invece essere pari al 2%.
E questo influisce direttamente sui costi d'esercizio. Questa
caratteristica inoltre contribuisce a ridurre notevolmente la rumorosità
del motore rispetto a quella degli azionamenti PWM tradizionali basati
sulla frequenza di commutazione.
La tecnologia DTC è già stata utilizzata in molti impianti?
Sì, in centinaia di migliaia di impianti. Per esempio, uno dei più
grandi costruttori di bobinatrici ha provato la tecnologia DTC per
un avvolgitore in un processo di finissaggio pellicola.
I requisiti:
Esatto controllo della coppia nell'avvolgitore al fine di ottenere
film di qualità più elevata.
La soluzione:
Azionamenti DTC ad anello aperto al posto degli azionamenti in
c.c. di tipo tradizionale e successivamente in sostituzione di
un azionamento vettoriale in c.a. nella stazione del riavvolgitore.
Guida tecnica n.1 - Controllo Diretto della Coppia
21
Domande e Risposte
I benefici:
Costruzione semplificata della stazione del riavvolgitore e maggiore
affidabilità. Il costo di una tachimetrica montata e del relativo cablaggio
è equivalente al costo di un motore in c.a. da 30 kW. Questo significa
minori costi di investimento.
Funzionamento
Qual è la differenza tra la tecnologia DTC e i metodi
PWM tradizionali?
• PWM con controllo di frequenza e PWM vettoriale
Negli azionamenti PWM tradizionali, la tensione e la frequenza di
uscita vengono usate come principali variabili di controllo, ma queste
devono essere modulate con impulsi in ampiezza prima di essere
applicate al motore.
Questo stadio di modulazione contribuisce ad accrescere il tempo
di elaborazione del segnale limitando di conseguenza il livello
della coppia e la risposta in velocità dell'azionamento PWM.
Generalmente, un modulatore PWM richiede un tempo 10 volte
supeiore rispetto alla tecnologia DTC per adeguarsi al nuovo valore
effettivo.
• Controllo DTC
La tecnologia DTC consente di utilizzare la coppia e il flusso
statorico del motore come principali variabili di controllo - ed
entrambe sono ottenute direttamente dal motore. Pertanto, con
la tecnologia DTC non vi è necessità di un modulatore PWM
separato, controllato in frequenza e in tensione. Un altro notevole
vantaggio degli azionamenti DTC sta nel fatto che per il 95% di
tutte le applicazioni non risulta necessario un dispositivo di
retroazione.
Perché la tecnologia DTC non richiede una tachimetrica o
un encoder per indicare con precisione la posizione
dell'albero del motore?
La risposta a questa domanda va cercata in quattro principali
motivi:
• La precisione del modello del motore (vedere pagina 27).
• Le variabili di controllo vengono acquisite direttamente dal
motore (vedere pagina 27).
• La rapidità di elaborazione dell'hardware del selettore degli
impulsi ottimali e DSP (vedere pagina 28).
• Non occorre un modulatore (vedere pagina 12).
22
Guida tecnica n.1 - Controllo Diretto della Coppia
Domande e Risposte
In un azionamento DTC, le caratteristiche sopra illustrate
consentono di configurare un azionamento in grado di calcolare
le tensioni di commutazione ottimali 40.000 volte al secondo.
Si tratta quindi di una rapidità sufficiente per controllare i singoli
impulsi di commutazione. In altre parole, si tratta
dell'azionamento più veloce mai realizzato.
Con cicli che si ripetono ogni 25 microsecondi, viene trasmessa
al semiconduttore dell'inverter una sequenza di commutazione
ottimale per produrre la coppia richiesta. Questa velocità di
aggiornamento è notevolmente inferiore a qualsiasi costante
di tempo nel motore. Di conseguenza, è il motore che diventa
ora il componente limite, e non l'inverter.
Qual è la differenza tra la tecnologia DTC e gli altri
azionamenti sensorless disponibili sul mercato?
Tra la tecnologia DTC e molti degli azionamenti sensorless sul
mercato vi sono notevoli differenze. Quella principale riguarda
tuttavia la capacità della tecnologia DTC di assicurare un
controllo accurato anche alle basse velocità, fino alla velocità
zero, senza retroazione da encoder. Alle basse frequenze,
l'aumento della coppia nominale può avvenire in meno di 1 ms,
una caratteristica senza precedenti.
Come è possibile, per la tecnologia DTC, assicurare un
livello di prestazioni tipico dei servoazionamenti?
Questo è dovuto al fatto che ora è il motore a trasformarsi nel
fattore limite delle prestazioni, e non il convertitore. La precisione
dinamica tipica di un servoazionamento è pari a 0,1%s. La
tecnologia DTC può raggiungere questa precisione dinamica
tramite retroazione di velocità da una tachimetrica opzionale.
Come è possibile, per la tecnologia DTC, assicurare questi
miglioramenti rispetto alla tecnologia tradizionale?
La differenza più sorprendente è data dall'ampia gamma di
velocità in cui può operare la tecnologia DTC. Come già
menzionato, la risposta in coppia è la più rapida disponibile.
Per ottenere un veloce anello in coppia, ABB ha utilizzato la più
recente tecnologia di elaborazione dei segnali ad alta velocità e ha
dedicato 100 anni-uomo allo sviluppo del più avanzato modello di
motore che simula con precisione i parametri effettivi del motore
nel controllore.
Per comprendere meglio i principi teorici del controllo DTC, vedere
la pagina 26.
Guida tecnica n.1 - Controllo Diretto della Coppia
23
Domande e Risposte
La tecnologia DTC utilizza la logica fuzzy nel suo anello
di controllo?
No. La logica fuzzy viene utilizzata da alcuni azionamenti per
mantenere la corrente di accelerazione entro i limiti di corrente
e quindi prevenire il blocco non necessario dell'azionamento.
Poiché la tecnologia DTC controlla la coppia direttamente, la
corrente può essere mantenuta entro i limiti in qualsiasi
condizione operativa.
Si dice che gli azionamenti che utilizzano la tecnologia
DTC siano esenti da scatti intempestivi. Come si ottiene
questo risultato?
Molti costruttori hanno dedicato anni di ricerca e sviluppo al
problema degli scatti intempestivi durante l'accelerazione e la
decelerazione, trovando la questione molto ardua da risolvere.
La tecnologia DTC riesce in questo intento controllando la coppia
effettiva del motore.
La velocità e la precisione dell'azionamento che fanno
affidamento su parametri di controllo calcolati piuttosto che
misurati non potranno mai essere realistiche. Senza
guardare l'albero, non si può avere un quadro reale della
situazione. E' vero questo nel caso della tecnologia DTC?
La tecnologia DTC fotografa l'intera situazione. Come spiegato
in precedenza, grazie alla sofisticazione del modello di motore
e alla capacità di eseguire 40.000 operazioni matematiche al
secondo, la tecnologia DTC conosce precisamente l'esatta
condizione dell'albero motore. Non esiste alcun dubbio circa lo
stato del motore. E questo si riflette nelle eccezionali
caratteristiche di risposta in coppia e di precisione in velocità
illustrate alle pagine 16-17.
Diversamente dagli azionamenti in c.a. di tipo tradizionale, dove
il 30% di tutte le commutazioni vanno perse, un azionamento
basato sulla tecnologia DTC sa esattamente dove si trova
l'albero, e non spreca quindi alcuna commutazione.
La tecnologia DTC è in grado di coprire il 95% di tutte le applicazioni
industriali. Alle eccezioni, per lo più applicazioni che richiedono un
controllo di velocità estremamente preciso, si può far fronte
aggiungendo un dispositivo di retroazione per assicurare il controllo
ad anello chiuso. Si tratta comunque di un dispositivo che può essere
più semplice dei sensori che si rendono necessari con gli
azionamenti ad anello chiuso di tipo convenzionale.
24
Guida tecnica n.1 - Controllo Diretto della Coppia
Domande e Risposte
Anche i semiconduttori più rapidi introducono dei tempi
morti. Qual è quindi la precisione di autotuning di un
azionamento DTC?
L'autotuning viene utilizzato nella routine di identificazione iniziale
degli azionamenti DTC (vedere pagina 27). I tempi morti vengono
misurati e quindi considerati dal modello di motore ai fini del
calcolo del flusso effettivo. In un azionamento PWM, invece, il
problema si colloca nella gamma 20-30 Hz, dove si genera
ondulazione di coppia.
Qual è la stabilità assicurata da un azionamento DTC in
presenza di carichi lievi e basse velocità?
Gli azionamenti DTC sono caratterizzati da una buona stabilità
fino alla velocità zero e dalla capacità di assicurare una buona
precisione in coppia e in velocità alle basse velocità e in presenza
di carichi leggeri. Abbiamo definito il grado di precisione come
segue:
Precisione in coppia: In un campo di velocità tra il 2 e il 100%
e in un campo di carico tra il 10 e il 100%, la precisione di
coppia è del 2%.
Precisione in velocità: In un campo di velocità tra il 2 e il
100% e in un campo di carico tra il 10 e il 100%, la precisione di
velocità è pari al 10% dello scorrimento del motore. Lo
scorrimento del motore nel caso di un motore da 37 kW è di
circa il 2%, il che significa una precisione in velocità dello 0,2%.
Quali sono i limiti della tecnologia DTC?
Se si collegano in parallelo più motori con un inverter controllato con
la tecnologia DTC, la configurazione che si ottiene corrisponde a
quella di un unico grande motore. Non sono quindi disponibili
informazioni sullo stato di ogni singolo motore. Se il numero di motori
varia o se la potenza del motore resta al di sotto di 1/8 della potenza
nominale, è meglio scegliere la macro di controllo scalare.
La tecnologia DTC può essere utilizzata con qualsiasi tipo
di motore a induzione?
Sì, con qualsiasi tipo di motore asincrono a gabbia di scoiattolo.
Guida tecnica n.1 - Controllo Diretto della Coppia
25
Capitolo 4 - Principi teorici alla base del controllo
Come funziona
la tecnologia
DTC
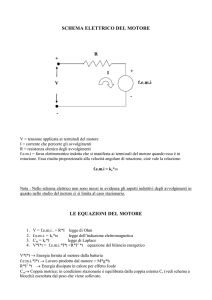
La figura 5 mostra lo schema a blocchi della tecnologia DTC.
Diagramma a blocchi
Rete
ANELLO DI
CONTROLLO
DELLA COPPIA
ANELLO DI
CONTROLLO DELLA
VELOCITA'
Raddrizzatore
Riferimento di coppia interno
Riferimento di coppia
Controllore
riferimento di coppia
Comparatore di
coppia
Controllore
Riferimento
di velocità
di velocità
Comparatore di
flusso
+ compensatore
di accelerazione
Bus in c.c.
Comandi
posizioni di
commutazione
Inverter
Coppia effettiva
Controllore
riferimento di flusso
Flusso effettivo
Ottimizzazione del flusso
Modello adattivo
di motore
Flusso di frenatura
Riferimento di
flusso interno
Velocità effettiva
Stato della
coppia
Selettore
Segnali di impulso
controllo
ottimale
Stato del
flusso
Posizione di commutazione
Tensione bus in c.c.
Corrente motore
Corrente motore
Trifase
Figura 5: DTC comprende due blocchi chiave: Controllo della velocità e
Controllo della Coppia
La schema a blocchi mostra che la tecnologia DTC presenta
due sezioni fondamentali: l'anello di controllo della velocità e
l'anello di controllo della coppia. Prenderemo ora in considerazione
ogni blocco illustrando come si integrano tra loro.
Cominciamo dall'anello di controllo della coppia.
26
Guida tecnica n.1 - Controllo Diretto della Coppia
Principi teorici alla base del controllo
Anello di
controllo della
coppia
Rete
Anello di controllo della coppia
Raddrizzatore
Riferimento di coppia interno
Bus in c.c.
Comparatore di
coppia
Stato della
coppia
Segnali di
controllo
Comparatore di
flusso
Selettore
impulso
ottimale
Stato del
flusso
Comandi
posizioni di
commutazione
Coppia effettiva
Flusso effettivo
Modello adattivo
di motore
Posizione di commutazione
Tensione bus in c.c.
Corrente motore
Corrente motore
Trifase
Fase 1: Misure di Nel normale funzionamento, le due correnti di fase del motore e
tensione e di la tensione del bus in c.c. vengono semplicemente misurate,
corrente unitamente alle posizioni di commutazione dell'inverter.
Fase 2: Modello Le informazioni di misura dal motore vengono trasmesse al
di motore modello di motore adattivo.
adattivo
Il livello di sofisticazione di questo modello di motore consente
di calcolare dati precisi in relazione al motore. Prima di mettere
in funzione l'azionamento DTC, vengono trasmesse al modello
di motore le informazioni sul motore raccolte durante l'esecuzione
della routine di identificazione. Questo processo, noto come
"autotuning", consente di determinare dati quali la resistenza
dello statore, l'induttanza reciproca e i coefficienti di saturazione,
unitamente all'inerzia del motore. L’identificazione dei parametri
del modello del motore può essere fatta a rotore fermo. Ciò
rende l’operazione più semplice e permette di utilizzare
l’avanzata tecnologia DTC anche su retrofits. Ciò nonostante il
più elevato grado di precisione nel tuning del modello del motore
è comuncue garantito quando l’identificazione viene fatta con
motore in rotazione, operazione questa che necessita di soli
alcuni secondi.
Non vi è alcuna necessità di retroazione della velocità o della
posizione dell'albero mediante tachimetrica o encoder se i
requisiti di precisione della velocità statica sono superiori allo
Guida tecnica n.1 - Controllo Diretto della Coppia
27
Principi teorici alla base del controllo
0,5%, così come accade nella maggior parte delle applicazioni
industriali. Si tratta di un significativo passo avanti rispetto
alla tecnologia di tutti gli altri azionamenti in c.a. Il modello di
motore è di fatto la chiave delle prestazioni senza rivali offerte
dalla tecnologia DTC alle basse velocità.
Le uscite del modello di motore controllano i segnali che
rappresentano direttamente il flusso statorico effettivo e la coppia
effettiva del motore. Anche la velocità dell'albero viene calcolata
all'interno del modello di motore.
Fase 3:
Comparatore di
flusso e di coppia
Le informazioni di controllo della commutazione di potenza
vengono prodotte nel comparatore di flusso e di coppia.
I valori effettivi di coppia e di flusso vengono inviate al comparatore
che, ogni 25 microsecondi, li confronta con i riferimenti di coppia e
di flusso. Questi segnali vengono quindi inviati al selettore degli
impulsi ottimali.
Fase 4: Selettore
impulsi ottimali
Il selettore degli impulsi ottimali incorpora un processore dei
segnali digitali (Digital Signal Processor, DSP) da 40 MHz e
circuiti ASIC per determinare la logica di commutazione
dell'inverter. Inoltre, tutti i segnali di conrollo sono trasmessi
tramite fibre ottiche per assicurare la trasmissione dei dati ad
alta velocità.
Questa configurazione consente di ottenere una notevole velocità
di elaborazione, cosicché ogni 25 microsecondi ai dispositivi di
commutazione dei semiconduttori dell'inverter viene trasmesso un
impulso ottimale per il raggiungimento o il mantenimento di una
precisa coppia motore.
La corretta combinazione di commutazione viene determinata ad
ogni ciclo di controllo. Non vi è uno schema di commutazione
prestabilito. La tecnologia DTC è stata per questo motivo definita
commutazione “just-in-time” poiché, diversamente dagli azionamenti
PWM tradizionali dove fino al 30% delle commutazioni non sono
necessarie, nella tecnologia DTC ogni commutazione risulta
necessaria e viene di fatto utilizzata, riducendo di conseguenza il
contenuto di armoniche.
L'elevata velocità di commutazione è fondamentale per le
eccezionali prestazioni della tecnologia DTC. I principali
parametri di controllo del motore sono aggiornati 40.000 volte
al secondo. Questo permette una risposta sull'albero
eccezionalmente rapida, così come necessario affinché il
modello di motore (vedere la fase 2) possa aggiornare le
informazioni.
E' questa velocità di elaborazione che permette di ottenere
prestazioni di livello superiore quali la precisione statica in
velocità senza encoder del ±5% e una risposta in coppia inferiore
a 2 ms.
28
Guida tecnica n.1 - Controllo Diretto della Coppia
Principi teorici alla base del controllo
Controllo di
velocità
Anello di controllo della velocità
Controllore riferimento
di coppia
Riferimento di coppia
Riferimento di velocità
Controllore
di velocità
+ compensatore
di accelerazione
Controllore
riferimento di flusso
Ottimizzazione del flusso
Flusso di frenatura
Velocità effettiva
Fase 5:
Controllore del
riferimento di
coppia
Nel controllore del riferimento di coppia, l'uscita di controllo della
velocità è limitata dai limiti di coppia e dalla tensione del bus in
c.c.
E' previsto anche il controllo della velocità nei casi in cui si utilizza
un segnale di coppia esterno. Il riferimento di coppia interno
proveniente da questo blocco viene inviato al comparatore di
coppia.
Fase 6:
Controllore di
velocità
Il blocco del controllore di velocità è costituito da un regolatore
PID e da un compensatore di accelerazione. Il segnale del
riferimento di velocità esterno viene confrontato con la velocità
effettiva prodotta all'interno del modello di motore. Il segnale di
errore viene quindi trasmesso sia al regolatre PID che al
compensatore di accelerazione. L'uscita è data dalla somma delle
uscite di entrambi.
Fase 7:
Controllore del
riferimento di
flusso
Il controllore del riferimento di flusso può trasmettere un valore
assoluto del flusso statorico al blocco del comparatore di flusso.
La capacità di controllare e modificare questo valore assoluto
consente di predisporre con facilità numerose funzioni inverter
quali l'ottimizzazione di flusso, il flusso di frenatura e l'indebolimento
di campo e flusso di frenatura (vedere pagina 19).
Guida tecnica n.1 - Controllo Diretto della Coppia
29
Capitolo 5 - Indice alfabetico
A
acqua 5, 20
aeratori 20
affidabilità 8, 18
anello chiuso 10, 11, 15, 16
anello di controllo 7, 9, 10, 12, 13,
24, 26, 27, 29
Anello di controllo della coppia 26
Anello di controllo velocità 26
armoniche 15, 20
ascensori 17
ASIC 28
assistenza 8
aumento di coppia nominale 23
autoalimentazione in mancanza di
rete 19, 21
auto-tuning 19, 25, 27
avviamento 19, 20
avvio 5, 19, 20, 26
avvolgimenti di indotto 7
avvolgimento statorico 9, 10
avvolgitore 17, 21, 22
azionamenti a velocità variabile 5,
6, 13, 20
azionamenti ad anello aperto 9
azionamenti ad anello chiuso 10, 11
azionamenti in c.a. ad anello aperto
12
azionamenti PWM vettoriali 11
azionamento a velocità variabile in
c.a. 6, 8
azionamento alimentato in tensione
8
azionamento in c.a. 5, 6, 8, 9, 10,
12, 13, 14, 15, 16, 17, 18, 21, 24, 27
azionamento in c.a. basato sulla tecnologia DTC 12, 13
azionamento in c.a. con controllo di
frequenza 9
azionamento in c.a. con controllo
vettoriale 10
azionamento in c.a. PWM 11, 14,
21, 22, 24, 28
azionamento in c.c. 7, 8, 9, 10, 11,
12, 13, 14, 18
Azionamento per motori in c.c. 6
B
basse frequenze 16, 17, 23
Blaschke 16
bobinatrice 21
C
campo statorico 11
ciclo di controllo 28
coefficiente di saturazione 27
collegamenti a fibre ottiche 28
Comparatore di coppia 28, 29
comparatore di flusso 28, 29
compensatore di accelerazione 29
complesso commutatore-spazzole 7
30
condizionamento aria 5, 20
controllo della precisione 18
controllo dell’isteresi 28
controllo di frequenza 6, 9, 13, 22
controllo di posizione 18
controllo di velocità 6, 7, 24, 26,
28, 29
Controllo diretto della coppia 5, 6,
7, 8, 9, 10, 11, 12, 13, 14, 15, 26
controllo orientamento di
campo 16
controllo scalare 10, 25
controllo vettoriale 6, 10, 11, 13
Controllore del riferimento di coppia
29
Controllore del riferimento di flusso
29
controllore elettronico 11, 14
coppia 5, 6, 7, 8, 9, 10, 11, 12, 13,
14, 15, 16, 17, 18, 19, 20, 21, 22,
23, 24, 25, 26, 28, 29
- anello 23
- carico massimo alla velocità zero
16
- controllo 5, 6, 7, 8, 10, 12, 18, 21,
26
- controllo alle basse frequenze 16
- linearità 17
- ondulazione 24
- ripetibilità 18
- risposta 6, 8, 11, 12, 18, 23, 24,
28
coppia di carico 16, 20
coppia dle motore 8, 12, 28
Coppia e flusso 28
corrente di campo 7
corrente di indotto 7
corrente di magnetizzazione 7
costante di tempo elettrica 8
costante di tempo 8, 23
costi 8, 10, 11, 18, 19, 21
costi di esercizio 21
costi iniziali 18
D
Depenbrock 16
dispositivo di retroazione 9, 10, 11,
13, 15, 16, 22, 24
DSP 22, 28
DTC 5, 6, 12, 13, 14, 15, 16, 17,
18, 19, 20, 21, 22, 23, 24, 25, 26,
27, 28
E
elaborazione dei segnali 12, 22, 23
elaborazione dei segnali digitali 12
encoder 12, 22
encoder 8, 11, 12, 14, 18, 22, 23,
27, 28
F
fattore di potenza 20
Guida tecnica n.1 - Controllo Diretto della Coppia
finissaggio pellicola 21
flusso di frenatura 19, 29
flusso di magnetizzazione del
motore 12
flusso rotorico 11
flusso statorico 22, 28, 29
frenatura 19, 29
freno meccanico 18
frequenza di ingresso 15
frequenza di uscita 22
H
HVAC 20
I
impulsi di commutazione 23
industria alimentare 20
industria delle cartiere 17
induttanza reciproca 27
inerzia 27
ingranaggi 19
L
logica fuzzy 24
M
manutenzione 6, 8, 18
messa in servizio 19
Modello di motore 10, 22, 23, 24,
27, 28, 29
modulatore 9, 10, 11, 12, 14, 22
motore a induzione in c.a. 10, 11
motore in c.a. 5, 6, 8, 13, 18
motore in c.c. 6, 7, 8, 11, 15
O
OEM 5
orientamento del campo 7, 8, 10,
11, 12
ottimizzazione del flusso del
motore 21
ottimizzazione di flusso 19, 21, 29
P
perdite in ingresso 20
pompa 10, 19, 20, 21
ponte a diodi 20
ponte di ingresso controllato 20
posizione angolare 11
posizione rotore 7
precisione dinamica in velocità 12,
17, 18, 23
precisione in velocità 6, 8, 11, 12,
15, 17, 18, 23, 24, 25, 27
precisione statica 18
precisione velocità statica 17, 27
Pulse Width Modulation (modulazione ampiezza impulsi, PWM) 9
PWM 6, 9, 10, 11, 14, 15, 16, 17,
21, 22, 24, 28
R
raddrizzatore a diodi 9
Regolatore di velocità 29
regolatore motore 8
regolatore PID 29
Guida tecnica n.1 - Controllo Diretto della Coppia
resistenza statorica 27
retroazione di posizione 8
retrofit 19
RFI 15
riavvio 19
riferimento di velocità esterno 29
riscaldamento 20
risparmio energetico 21
risposta dinamica in velocità 8
risposta in velocità 7, 8, 22
rotore 7, 8, 10, 11
rumorosità 15, 19, 20, 21
rumorosità del motore 19, 21
S
scatto 15, 19, 20, 24
schema di commutazione 19, 23,
28
schema di commutazione
prestabilito 19, 28
segnale di coppia esterno 29
Selettore impulsi ottimali 28
senza sensori 23
servoazionamento 18, 23
sollecitazione 19, 21
stabilità 25
statore 7, 9, 10, 11, 22, 27, 28, 29
T
tachimetrica 12, 14, 16, 17, 18, 22,
23, 27
tempo di elaborazione dei
segnali 22
tensione 8, 9, 10, 11, 14, 15, 16,
19, 20, 22, 23, 27, 29
tensione bus in c.c. 27, 29
tensione del collegamento in c.c. 19,
20
tensione di uscita 22
trasportatori 20
tubazioni 21
U
unità di generazione linea ingresso
azionamento 20
universale 12, 15, 18, 20
uscita di controllo velocità 29
V
variabili di controllo 10, 13, 15, 22
variabili di controllo 9, 11, 12, 14, 22
velocità 5, 6, 7, 8, 9, 10, 11, 12, 13,
14, 15, 16, 17, 18, 19, 20, 22, 23, 24,
25, 26, 27, 28, 29
velocità rotorica 11
velocità statica del motore 17
velocità zero 11, 16, 18, 19, 23, 25
ventilatori 10, 19, 20, 21
ventilazione 20
vettore di flusso 6, 10, 11, 13, 16,
21, 22
VSD 5, 6
31
DICA
014
ETICHE
441
Stampato
OR
TA
EC
O L O GI C
A
N
3BFE 64232703 RO104
IT 30.7.1999
T
ABB Industria S.p.A.
Viale Edison 50
20099 Sesto S. Giovanni (Mi)
Tel:
02 - 26 23 27 32
Fax: 02 - 26 23 29 79
Internet:
http://www.abb.it