L. Taponecco - Appunti di Meccatronica
Cap. IV - Elementi del circuito di controllo.
IV-1 Generalità.
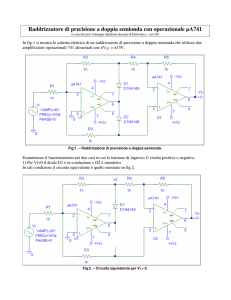
Negli azionamenti elettrici il tipo di controllo del moto di gran lunga più diffuso è
quello in cascata o gerarchico, che è caratterizzato dalla presenza di più anelli
sovrapposti (fig. IV-1), in ognuno dei quali la variabile di stato ha una dinamica
molto più rapida di quella relativa alla variabile di stato dell'anello immediatamente
più esterno.
Fig. IV-1
Le caratteristiche salienti del controllo in cascata sono:
-relativa semplicità nella scelta e nel dimensionamento dei vari controllori (uno per
ogni variabile controllata), in quanto si può assumere che il transitorio della variabile
di un anello inizi solo dopo che è terminato quello della variabile relativa all'anello
sottostante e quindi si può prendere in esame una sola parte del sistema per volta; ad
esempio nel caso dell'azionamento di figura IV-1 si dimensiona il controllore
dell'anello di corrente, quindi quello di velocità e infine quello di posizione;
-notevole flessibilità, in quanto é possibile, partendo da un dato azionamento,
ottenere facilmente il controllo di ulteriori variabili aggiungendo altri anelli;
-elevata protezione del sistema, in quanto ogni variabile intermedia può essere
limitata limitando il relativo valore di riferimento.
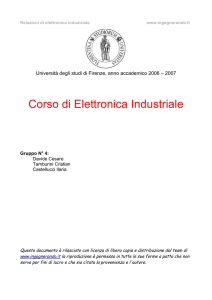
Poiché in questa struttura gerarchica nel caso di parecchi anelli è probabile che il
controllo risponda lentamente ad una variazione del riferimento, se è necessaria una
elevata dinamica, gli anelli interni devono essere attivati addizionalmente mediante
segnali di riferimento con alimentazione in avanti (fig. IV-2).
Fig. IV-2
145
L. Taponecco - Appunti di Meccatronica
Ciò premesso, prendiamo ora in esame un azionamento in corrente continua per il
controllo della velocità, la cui parte di potenza è costituita da un motore in corrente
continua ad eccitazione separata e da due raddrizzatori totalcontrollati a ponte trifasi,
di cui quello che alimenta il circuito di armatura del motore è costituito da due
raddrizzatori in antiparallelo per recuperare l'energia di frenatura (fig. IV-3).
Fig. IV-3
Nello schema a blocchi di figura IV-3 possiamo distinguere i seguenti elementi
fondamentali del circuito di controllo: -organi di riferimento, -organi di comando, organi di misura, -controllori, -blocchi non lineari, -blocchi di calcolo.
146
L. Taponecco - Appunti di Meccatronica
IV-2. Organi di riferimento.
Forniscono una grandezza di riferimento regolabile espressa per mezzo di una
tensione continua (di valore massimo pari a 10÷15V). L'elemento più semplice e più
usato (fig. IV-4a) é il potenziometro, che viene realizzato con materiale insensibile
alle variazioni di temperatura e la cui tensione di alimentazione deve essere
stabilizzata. La tensione di uscita Vu dipende dalla posizione del cursore e la
risoluzione (solitamente dello 0,01℅) dal numero di spire per unità di lunghezza.
Poichè la sua uscita é connessa ad un circuito schematizzabile con una Rc è : Vu = ρ
Va/[1+ρ(1-ρ)R/Rc] e pertanto si ha una famiglia di curve (fig. IV-4b) al variare del
rapporto R/Rc. Per linearizzare la relazione tra Vu e ρ si può inserire un
disaccoppiatore di impedenze (inseguitore di tensione) a valle del potenziometro.
Fig. IV-4a
Fig. IV-4b
Se é necessario variare frequentemente la grandezza di riferimento é meglio per
motivi di usura utilizzare un potenziometro a induzione (fig. IV-5), costituito da
uno statore con un avvolgimento alimentato da una tensione alternata (per aumentare
la dinamica e ridurre le dimensioni del trasduttore si utilizza usualmente
un'alimentazione in onda quadra con frequenza ≅ 400÷500 Hz) e da un rotore, che
può essere ruotato fino a 90°. Sull'avvolgimento rotorico si induce una tensione
alternata, che raddrizzata da un ponte a diodi e spianata da un filtro, costituisce una
tensione continua di ampiezza variabile in funzione dell'angolo.
Fig. IV-5
Se è necessario un riferimento lentamente variabile nel tempo con velocità costante; si può fare muovere il cursore da un
servomotore.
147
L. Taponecco - Appunti di Meccatronica
IV-3. Organi di comando.
Con riferimento al caso di figura IV-3, in cui il convertitore statico è un raddrizzatore
ad SCR, la funzione dell'organo di comando è fornire, in base ai valori della tensione
di comando (Vcm) fornita dal regolatore di corrente e delle tensioni di riferimento
(Vr) ricavate dalla rete di alimentazione, le sequenze di impulsi per i gate degli SCR,
controllando i relativi istanti di innesco e quindi il valore medio della tensione ai
suoi morsetti di uscita (Vcα).
Nello schema a blocchi di figura IV-3, in uscita dall'organo di comando anzichè dei
segnali logici si ha un segnale analogico (Vciα); questa apparente incongruenza
deriva dal fatto che il modello assunto per il raddrizzatore: Vcα=Vciα−RiIc−LidIc/dt
è stato scomposto (fig. IV-6) in due parti:
- generatore ideale di tensione Vciα che è stato conglobato nell'organo di comando
con il dispositivo di comando dei gate;
- parametri Ri , Li che sono stati conglobati nel sistema da regolare con il circuito di
armatura del motore.
Fig. IV-6
148
L. Taponecco - Appunti di Meccatronica
IV-3/1. Modello del raddrizzatore controllato.
In figura IV-7a sono riportati gli andamenti a regime della tensione di uscita e delle
correnti di ingresso di un raddrizzatore a ponte trifase totalcontrollato nell'ipotesi di
induttanza del carico infinita Lv=∞ e di induttanza a monte nulla Lm=0.
Fig. IV-7a
Fig. IV-7b
La tensione ai morsetti di uscita del raddrizzatore vci(t) presenta un andamento
variabile periodicamente nel tempo, che possiamo scomporre in un valor medio Vciα
e in un'ondulazione attorno ad esso. Dato che l'ondulazione ha una influenza
trascurabile sul comportamento statico e dinamico dei circuiti di controllo il
funzionamento discreto del raddrizzatore può essere simulato mediante un modello
continuo costituito da un generatore di tensione, la cui d.d.p. ai morsetti é:
Vciα = [(sq/2π)√2Vconc/l] cosα, con q numero delle fasi, s numero dei gruppi di
commutazione in serie, Vconc/l tensione concatenata di linea e α angolo di ritardo.
Nella realtà però, poiché l'induttanza a monte non é nulla, é impossibile che la
commutazione della corrente tra le fasi si verifichi istantaneamente, inoltre non
essendo l'induttanza a valle infinita la corrente di uscita presenta una certa
ondulazione. Per tenere conto dell'effetto dell'induttanza Lm a monte del convertitore
analizziamo, prendendo in esame per semplicità una struttura a stella trifase e
mantenendo l'ipotesi di induttanza del carico infinita, la commutazione della corrente
dal tiristore T1 al tiristore T2. A causa dell'effetto induttivo, nè T1 cessa bruscamente
di condurre nè T2 conduce immediatamente la piena corrente (fig. III-8), ma si ha un
tempo di commutazione durante il quale conducono sia T1 che T2 e la tensione ai
morsetti di uscita é: vc=(v1+v2)/2 (fig. III-9) [in quanto v1+v2 = Lm(di1/dt+di2/dt)+2vc
e, per l'ipotesi di Lv = ∞, d(i1+i2)/dt = 0].
149
L. Taponecco - Appunti di Meccatronica
Fig. IV-9
Fig. IV-8
L'effetto più significativo del conseguente differente andamento delle correnti in
ingresso e della tensione ai morsetti di uscita del raddrizzatore é una riduzione,
rispetto al caso ideale, del valore medio della tensione ai morsetti di uscita, data dal
rapporto tra la superficie tensione-angolo compresa tra α e α+µ e il periodo di
commutazione (2π/sq):
∆Vc = (sq/2π) ∫(v2−vc) dΩt = (sq/4π) ∫(v2−v1) dΩt = (sq/2π) (√2Vc/2) ∫senΩt dΩt =
(sq/2π)(√2Vc/2) [cosα−cos(α+µ)] = (sq/2π) (√2Vc/2) [Ic/Icc/max] = (sq/2π)ΩLmIc = RiIc
Pertanto si tiene conto del fenomeno della commutazione introducendo una
resistenza Ri fittizia (in cui cioè non si producono perdite per effetto Joule); mentre
le altre cadute di tensione negli SCR del raddrizzatore e nella resistenza degli
avvolgimenti del trasformatore vengono normalmente trascurate. Inoltre, poichè
l'induttanza Lm influenza anche (al di fuori dell'intervallo di commutazione) la
variazione del valor medio della corrente continua durante i fenomeni transitori, si
introduce un'induttanza Li , il cui valore dipende dalla struttura del raddrizzatore e
dal valore di Lm.
Il funzionamento reale discreto del raddrizzatore viene quindi simulato mediante un
modello continuo costituito da un generatore di tensione Vciα con in serie una
resistenza Ri=(sq/2π)ΩLm ed una induttanza Li=sLm :
Vcα=Vciα−RiIc−LidIc/dt.
150
L. Taponecco - Appunti di Meccatronica
IV-3/2. Principio di funzionamento.
La differenza tra la tensione continua di comando Vcm e una tensione di riferimento
Vr sinusoidale o a dente di sega (sincronizzata con la tensione della rete che alimenta
il raddrizzatore) viene convertita, mediante un trigger di Schmitt ad isteresi
trascurabile, in un segnale rettangolare e quindi, con l'ausilio di un monostabile che
agisce sul lato in salita, in una sequenza di impulsi (posizionati negli istanti in cui Vr
decrescendo incontra Vcm), che vengono inviati al gate dell'SCR, tramite un
amplificatore (per renderli atti ad accendere il tiristore) ed un trasformatore ad
impulsi (per isolare galvanicamente il circuito di regolazione da quello di potenza)
(fig. IV-10).
Fig. IV-10
Variando Vcm si varia α (fig. IV-11) e quindi l'istante in cui l'impulso di accensione
viene inviato al gate dell'SCR, ciò si traduce in una variazione del ritardo delle
commutazioni rispetto all'istante di intersezione delle tensioni sinusoidali in ingresso
al raddrizzatore e quindi del valore del valore medio della tensione in uscita dal
raddrizzatore. Affinché l'angolo α corrisponda all'angolo di ritardo di accensione
dell'SCR è indispensabile che Vr possieda una posizione di fase ben determinata
rispetto alle tensioni di alimentazione del raddrizzatore.
Fig. IV-11
Un organo di comando inserito nell'anello di corrente, fornisce un controllo automatico della corrente. Infatti ad
esempio, se, con Ir costante, la corrente Ia subisce a causa del carico una variazione in diminuzione (in aumento), Vcm
aumenta (diminuisce), quindi α diminuisce (aumenta), gli impulsi vengono anticipati (posticipati) e Vciα aumenta
(diminuisce) fino a riportare Ia al valore di partenza.
151
L. Taponecco - Appunti di Meccatronica
IV-3/3. Struttura.
Nel caso di raddrizzatore a ponte trifase occorrono 6 strutture del tipo descritto e 6
tensioni di riferimento (fig. IV-12), ottenibili ad esempio mediante un trasformatore
stella-stella con due secondari (fig. IV-13) aventi il neutro collegato con il punto
zero comune dell'organo di comando.
Inoltre, al fine di garantire che siano sempre attivi due tiristori fin dal primo istante, è
necessario introdurre 6 porte logiche OR in modo da inviare ad ogni commutazione
gli impulsi di accensione ai gate dei due SCR che devono essere in conduzione
contemporaneamente: T1T '2 , T '3T1 , T2T '3 , T '1T2 , T3T '1 , T '2T3 .
Fig. IV-12
Fig. IV-13
152
L. Taponecco - Appunti di Meccatronica
IV-3/4. Connessioni.
Il collegamento tra i sei morsetti del secondario del trasformatore e i sei ingressi di
riferimento dell'organo di comando dipende dalla successione delle accensioni degli
SCR voluta (in figura IV-14: T1, T '3 , T2 , T '1 , T3 , T '2).
Stabilito il valore di α ne consegue quello di Vcm (= Vr/max cosα).
La prima delle sei tensioni del grafico è Vr1 , la sua intersezione con Vcm determina
infatti l'istante di accensione di T1.
In base alla successione delle accensioni degli SCR le altre cinque tensioni di
riferimento sono in successione V'r3 , Vr2 , V'r1 , Vr3 , V'r2 .
Ne consegue la determinazione dei collegamenti tra i sei morsetti secondari del
trasformatore e l'organo di comando.
Fig. IV-14
153
L. Taponecco - Appunti di Meccatronica
IV-3/5. Comportamento statico.
Sebbene le caratteristiche statiche delle due parti che compongono il blocco che
rappresenta l'organo di comando siano non lineari:
α = arccos Vcm/Vr/max
Vciα= (sq/2π)√2Vconc/l cosα
(dispositivo di comando gate)
(generatore ideale di tensione)
la caratteristica statica dell'organo di comando é lineare:
Vciα= Kcm Vcm
dove Kcm = (sq/2π) (√2Vconc/l/Vr/max) dipende dal tipo di raddrizzatore, dalla tensione
della rete di alimentazione e dal valore massimo della tensione di riferimento.
Passando dalle grandezze assolute a quelle relative o in per unit, in quanto
grandezze più significative e che facilitano l'analisi dei circuiti di regolazione, e
assumendo a tal fine come grandezze di riferimento Vr/max per la tensione di comando
e Vconc/l per il valore medio ideale della tensione ai morsetti di uscita del
raddrizzatore, si ha:
vciα= kcmvcm
con kcm = Kcm(Vr/max/Vconc/l) = (sq/2π)√2.
In relazione al tipo di raddrizzatore kcm assume quindi i seguenti valori:
- 1,35 nel caso di ponte trifase o stella esafase,
- 0,9 nel caso di ponte monofase,
- 0,675 nel caso di stella trifase,
- 0,45 nel caso di stella monofase.
154
L. Taponecco - Appunti di Meccatronica
IV-3/6. Comportamento dinamico.
Il funzionamento dell'organo di comando è di tipo discreto, in quanto invia gli
impulsi di accensione ai gate degli SCR solo quando si verifica una intersezione tra
la tensione di comando e il tratto discendente di una delle tensioni sinusoidali di
riferimento; pertanto le variazioni di Vcm si ripercuotono su Vciα e quindi vengono
recepite dal sistema controllato con un certo ritardo. Nel caso di piccole variazioni di
Vcm il tempo di ritardo tr è variabile tra 0 e T/p. La tensione Vciα(t) presenta quindi un
andamento a gradini (fig. IV-15) tipico dei sistemi campionati con elemento di
mantenimento di ordine zero ZOH.
Il comportamento dinamico dell'organo di comando può quindi essere rappresentato,
con buona approssimazione per ciò che riguarda lo studio della stabilità,
rimpiazzando il sistema reale discontinuo con un sistema continuo con un tempo
morto Tcm = T/2p, che nel caso di raddrizzatore trifase a ponte è Tcm= 20ms/(2⋅6) =
1,666 ms.
Fig. IV-15
155
L. Taponecco - Appunti di Meccatronica
IV-3/7. Funzione di trasferimento.
La funzione di trasferimento (f.d.t.) dell'organo di comando in base alle precedenti
considerazioni è quindi:
Gcm(s) = kcm e− sTcm .
Sviluppando la funzione esponenziale e−sTcm in serie di Taylor e trascurando i termini
in s2, s3, ecc. , in quanto Tcm molto piccolo (1,67 ms nel caso di raddrizzatore a ponte
trifase e frequenza di rete pari a 50 Hz), si ottiene:
Gcm(s) ≅ kcm/(1+sτcm)
Si rimpiazza cioè un tempo morto (Tcm) con una piccola costante di tempo (τcm=
Tcm); cosa ammissibile in quanto l'errore che si commette é trascurabile.
Nel caso di grandi variazioni della tensione di comando non si può definire una funzione di trasferimento per l'organo di
comando. Si supponga che il convertitore lavori come raddrizzatore con una tensione di comando Vcm molto alta e che,
subito dopo l'intersezione con Vr2, Vcm sia commutata ad un valore negativo limite (funzionamento da inverter).
L'intersezione con la tensione di riferimento successiva Vr3 si avrà con un tempo di ritardo praticamente uguale alla metà
del periodo della tensione di riferimento (fig. IV-16). In questo intervallo di tempo le intersezioni con le tensioni di
riferimento 1, 6, 1, 2 determinano degli impulsi, a cui non corrisponde l'accensione dei corrispondenti tiristori in quanto
le loro tensioni anodo-catodo sono negative. Se invece Vcm passa da un valore negativo ad uno positivo e la sua
variazione é sufficientemente grande, l'intersezione con la tensione di riferimento successiva si verifica con un tempo di
ritardo nullo (da 5 a 6 e da 6 a 1).
Fig. IV-16
Fig. IV-17
Anche la f.d.t. dell'organo di comando dei chopper è: Gcm(s) = kcm e− sTcm ,
con kcm=1 e τcm è uguale alla metà del periodo di pulsazione del chopper Tch
Infatti, essendo (fig. IV-17): Toff=Ts(Vh/max−Vcm)/Vh/max e Vciα=Vcont(1−Toff/Ts) si ha:
Vciα= (Vcont/Vh/max)Vcm= KcmVcm e, assumendo come grandezze di riferimento la
tensione continua in ingresso al chopper (Vcont) per Vciα e il valore massimo della
tensione di riferimento a dente di sega (Vh/max) per Vcm , kcm = Kcm(Vh/max/Vcont) = 1
Pertanto nel caso di un chopper funzionante a 20 kHz si ha: τcm = 1/(2⋅20⋅103 ) =
0,025 ms e il tempo di ritardo non oltrepassa mai il periodo di pulsazione anche
nel caso di grandi variazioni delle tensioni di comando.
156
L. Taponecco - Appunti di Meccatronica
IV-4. Organi di misura.
I sensori sono insiemi di uno o più trasduttori con relativa circuiteria per
l'elaborazione del segnale, la cui funzione è convertire una generica grandezza fisica
in ingresso in un segnale elettrico (generalmente una tensione continua) in uscita
interfacciabile con il sistema di controllo-processo. I sensori si dividono in assoluti e
incrementali, in analogici e digitali, in intelligenti (se interagiscono con un computer
di controllo per la manipolazione dei dati) e non intelligenti (se forniscono al
computer dei semplici dati).
Molta attenzione va posta sul quantitativo di informazioni necessarie; troppe
informazioni possono far smarrire quelle fondamentali tra quelle secondarie, poche
informazioni possono creare un quadro non corretto del sistema. Inoltre, poiché i
sensori distorcono i sistemi in cui vengono inseriti, ogni misura è affetta da errori di
tipo sia sistematico (che derivano dalla configurazione del sistema e possono essere
stimati e compensati) che accidentale (dovuti a interferenze o a errori di lettura,
difficilmente prevedibili che devono essere trattati con metodi statistici) ed è quindi
praticamente impossibile che valore misurato e valore reale coincidano.
Varie sono le proprietà che, oltre al costo, caratterizzano un organo di misura, tra
queste:
-velocità di risposta: capacità della grandezza in uscita di seguire, col minimo
ritardo possibile, le variazioni della grandezza in ingresso;
-risoluzione: minimo valore della grandezza in ingresso distinguibile;
-precisione: scarto a regime stazionario tra valore vero e valore rilevato della
grandezza da misurare; causato dalla natura del sistema di misurazione e da fattori
come non-linearità, isteresi, deriva, effetti termici, invecchiamento, ecc.;
-stabilità: capacità di mantenere inalterate nel tempo le proprie caratteristiche;
-ripetibilità: capacità di fornire lo stesso risultato nel caso di molte misure
consecutive, usando la stessa strumentazione e nelle stesse condizioni;
-campo di misura: escursione tra la grandezza minima e massima misurabili;
-insensibilità ai disturbi: livello massimo che i disturbi possono raggiungere senza
alterare l'informazione contenuta nel segnale di uscita;
-linearità: proporzionalità tra grandezza in ingresso e grandezza in uscita in tutto il
campo di impiego;
-deriva (offset): variazione dell'uscita, causata non da variazioni dell'ingresso ma da:
variazione di temperatura, instabilità o invecchiamento dei componenti;
-risposta in frequenza: variazione dell'uscita di un sistema sottoposto ad un segnale
a frequenza variabile in ingresso.
Anche se per semplicità di trattazione spesso non si tiene conto delle f.d.t. dei vari sensori nè di quelle degli eventuali
filtri inseriti a valle degli stessi per ridurre l'ondulazione delle grandezze rilevate (assumendo implicitamente fattori di
trasferimento unitari e ritardi trascurabili rispetto alle altre piccole costanti di tempo del circuito di regolazione) è
importante conoscerle la f.d.t. in quanto influenzano la stabilità e la dinamica del sistema in cui sono inseriti.
157
L. Taponecco - Appunti di Meccatronica
IV-4/1. Organi di misura di grandezze elettriche.
IV-4/1a. Sensori di corrente.
Di seguito sono riportati i principali dispositivi utilizzati per il rilievo della
corrente.
- Shunt. La misura della corrente si ottiene in base a quella della tensione ai capi di
uno shunt di induttanza trascurabile inserito in serie al circuito in esame.
Principali pregi: semplicità, basso costo e buona velocità di risposta;
principali inconvenienti: mancanza di isolamento galvanico tra circuito di potenza e
circuito di controllo e dissipazione termica.
- Trasformatore di corrente continua ad effetto Hall (fig. IV-18a). E' il sensore
più usato per il rilievo della corrente continua, in quanto è caratterizzato da
separazione galvanica, eccellente velocità di risposta, elevata precisione, contenute
dimensioni e permette di rilevare qualsiasi andamento di corrente.
Fig. IV-18a
Fig. IV-18b
Effetto Hall. Sfrutta l'insorgere di un campo elettrico in seguito all'azione di un
campo magnetico su di una corrente. In una piastrina di forma parallelepipeda di
materiale semiconduttore (o conduttore) percorsa da corrente lungo l'asse y e
immersa in un campo magnetico le cui linee di forza sono dirette secondo l'asse z
(ortogonali cioè al piano della piastrina e quindi alla direzione della corrente), si
determina (equazioni di Maxwell) tra le due facce ortogonali all'asse x una differenza
di tensione proporzionale al prodotto I⋅B (fig. IV-18b). Pertanto dalla sua misura,
essendo nota la corrente di prova lungo l'asse y, si può risalire alla densità di flusso
magnetico B e quindi alla corrente che si vuole misurare (che ha creato B).
158
L. Taponecco - Appunti di Meccatronica
- TA+raddrizzatore non controllato+filtro. Se il sistema comprende un
convertitore ca/cc la corrente può anche essere misurata, anziché a valle, a monte del
raddrizzatore mediante un semplice TA seguito da un raddrizzatore non controllato e
da un filtro RC. Il metodo é caratterizzato da separazione galvanica, basso costo,
semplicità ed affidabilità, ma, rispetto ai due precedenti sistemi, non permette di
individuare il senso della corrente e la presenza del filtro determina un
peggioramento della dinamica dell'intero sistema di controllo; da questo punto di
vista è meglio utilizzare un TA trifase (fig. IV-19) anziché monofase.
Fig. IV-19
IV-4/1b. Sensori di tensione.
Per il rilievo della tensione si utilizzano dispositivi analoghi a quelli utilizzati per la
corrente.
- Partitore resistivo. Presenta una buona risposta in frequenza e un basso costo, ma
comporta un legame galvanico tra circuito di potenza e circuito di controllo.
- Trasformatore di tensione continua ad effetto Hall. Dalla misura della differenza
di tensione ∆V si risale alla densità di flusso magnetico B e quindi sia alla corrente
che alla tensione che lo hanno determinato; tale sensore è caratterizzato da
separazione galvanica, eccellente velocità di risposta, elevata precisione e contenute
dimensioni.
- TV+raddrizzatore non controllato+filtro. E' semplice, affidabile e di basso costo
ed é caratterizzato da separazione galvanica; la presenza del filtro determina però un
peggioramento della dinamica dell'intero sistema di controllo.
IV-4/1c. Sensori di flusso magnetico.
Si utilizzano sonde ad effetto Hall, o semplici spire; oppure si risale al flusso da
misure di corrente e di tensione.
159
L. Taponecco - Appunti di Meccatronica
IV-4/2. Organi di misura di grandezze meccaniche.
IV-4/2a. Sensori di posizione.
In figura IV-20 sono elencati i vari metodi di rilievo della posizione con e senza
sensori.
Fig. IV-20
160
L. Taponecco - Appunti di Meccatronica
- Potenziometro (fig. IV-21) - Converte uno spostamento lineare o angolare in una
variazione di resistenza elettrica e quindi di tensione. Richiede un'alimentazione
stabilizzata ed una resistenza insensibile alle variazioni di temperatura. La sua
risoluzione dipende dal numero di spire per unità di lunghezza; la sua precisione è
buona e il suo costo è relativamente basso, ma l'usura dovuta alla presenza di contatti
striscianti può costituire un problema. Le alterazioni della resistenza a causa della
temperatura e la presenza di carichi accidentali all'uscita, che fanno variare
sensibilmente la tensione ai capi del circuito, comportano degli errori.
Fig. IV-21
161
L. Taponecco - Appunti di Meccatronica
- Trasformatore differenziale - L'avvolgimento primario e il secondario (costituito
da due bobine identiche, connesse in opposizione e posizionate simmetricamente
rispetto al primario) sono disposti su di un cilindro cavo all'interno del quale c'é un
nucleo di materiale ferromagnetico. Quando il primario viene alimentato (con una
tensione alternata di 1-50 kHz), se il nucleo è disposto in posizione simmetrica
rispetto agli avvolgimenti, in entrambi i secondari viene indotta una f.e.m. uguale e
pertanto la tensione risultante ai capi del secondario (differenza tra le due f.e.m.
indotte) è nulla. Qualsiasi spostamento assiale del nucleo comportando una
variazione del flusso concatenato con i due avvolgimenti secondari (fig. IV-22)
determina una tensione secondaria risultante diversa da zero, che raddrizzata e
filtrata fornisce un segnale la cui ampiezza dipende dalla posizione del nucleo
mobile.
Vantaggi: assenza di contatti striscianti (lunga vita), legge tensione/spostamento
lineare e robustezza meccanica. Svantaggi: necessità di un filtro, corsa limitata e
spostamenti lenti.
Fig. IV-22
- Resolver – E' una piccola macchina elettrica (fig. IV-23a) che ha sullo statore due
avvolgimenti identici disposti a 90° elettrici, alimentati con tensioni sinusoidali
(1÷20kHz), e sul rotore due avvolgimenti identici disposti a 90° elettrici (più
raramente uno, in quanto comporta minore precisione e più difficile determinazione
della direzione del moto), che, tramite un sistema di anelli e spazzole, forniscono dei
segnali elettrici dai quali, mediante opportuno decodificatore, è possibile risalire alla
posizione assoluta dell'albero ad ogni istante.
Al variare della posizione angolare rotorica θ, negli avvolgimenti rotorici si
inducono:
- tensioni di ampiezza costante e fase variabile [v1=Vsen(ωt−θ); v2=Vsen(ωt−θ−π/2)]
se le tensioni di alimentazione sono sfasate di 90° elettrici (campo rotante),
- tensioni di fase costante e ampiezza variabile [v1=Vcosθsenωt; v2=Vsenθsenωt] se
le tensioni di alimentazione sono in fase (campo alternato).
162
L. Taponecco - Appunti di Meccatronica
Il resolver è un sensore molto accurato, affidabile, robusto, idoneo al funzionamento
in ambienti ostili (all'interno dei motori) e meno costoso dell'encoder assoluto;
richiede però nella sua versione standard, contatti striscianti e la sua uscita è
funzione non lineare della posizione. In figura 23b è rappresentato un resolver con
due avvolgimenti statorici e un solo avvolgimento rotorico energizzato (per evitare
gli attriti delle spazzole) mediante un trasformatore con primario solidale allo statore
e secondario solidale al rotore e collegato alla fase rotorica.
Fig. IV-23a
Fig. IV-23b
- Synchro. Piccola macchina elettrica con un avvolgimento rotorico monofase
alimentato con tensione sinusoidale (50-115 V; 50/60/400 Hz) e tre avvolgimenti
statorici su cui si inducono, per effetto trasformatorico, tre tensioni [Vs1=Vcosθsenωt
Vs2=Vcos(θ-120°)senωt Vs3=Vcos(θ-240°)senωt] in base alla cui ampiezza è
possibile determinare in modo univoco la posizione del rotore θ.
Il synchro è poco usato da solo, mentre viene spesso utilizzato in coppia con un synchro trasmettitore e un synchro
ricevitore aventi i morsetti statorici connessi elettricamente. Se entrambi i rotori sono alimentati dalla stessa linea l'uscita
è uno spostamento meccanico (synchro di coppia, il cui impiego tipico è la trasmissione di movimenti a distanza in navi,
aerei e treni). Se invece si alimenta solo l'avvolgimento rotorico del synchro trasmettitore l'uscita del synchro ricevitore
è una tensione alternata (synchro di controllo; in tal caso le sezioni degli avvolgimenti sono minori in quanto lo scopo è
la trasmissione di un segnale e non di una coppia).
- Encoder incrementale. E' un dispositivo elettromeccanico che rileva uno
spostamento analogico e lo trasforma in un segnale elettrico digitale. Attualmente
l'encoder incrementale di tipo ottico, il cui funzionamento è basato su interruzione o
riflessione di uno o più fasci di luce infrarossa, è di gran lunga più diffuso rispetto a
quelli magnetico e a spazzole. Esso, nel caso più comune in cui si debba rilevare
posizione e velocità angolare, è costituito da un disco metallico, con cave
uniformemente distribuite su una corona circolare lungo la sua periferia (con
rapporto tra vuoto e pieno 1:1), calettato sull'albero del motore, da un accoppiamento
fotoelettronico montato sul telaio, costituito da una sorgente luminosa (led ad
infrarossi, fotodiodo) e da un dispositivo sensibile alla luce (fototransistor
ricevitore), e da della logica (fig. IV-24).
163
L. Taponecco - Appunti di Meccatronica
Fig. IV-24
Ad ogni rotazione dell'albero pari alla distanza tra due cave successive il
fototransistor trasforma l'impulso luminoso da cui viene colpito in un impulso
elettrico; questo impulso, mediante un trigger di Schmitt ad isteresi trascurabile,
viene poi squadrato in una forma d'onda perfettamente quadra (cioè con rapporto
impulso/pausa 1:1). Si ottiene quindi un segnale logico costituito da un treno di
impulsi rettangolari, dal cui conteggio si può determinare l'angolo di cui é ruotato
l'albero, se il sistema ha un unico senso di rotazione. In caso contrario è necessario
individuare anche il senso di rotazione, a tale scopo l'encoder é provvisto di una
seconda pista di fori (o di un secondo accoppiamento ottico) sfalsata di un quarto di
periodo rispetto alla prima. I due segnali logici in quadratura A e B uscenti
dall'encoder (fig. IV-25a) consentono di distinguere 4 zone per ogni periodo e quindi
di determinare, mediante un circuito di decodificazione, il senso di rotazione (a
seconda che il segnale A anticipi il segnale B o viceversa - fig. IV-25b) e di
aumentare la risoluzione del sensore, generando ad ogni transizione di A o di B un
impulso, che viene inviato al contatore up/down (un encoder con N fori produce 4N
conteggi per rotazione). Una terza pista con un solo foro ha la funzione di fornire un
impulso di riferimento.
Due delle tre uscite digitali dell'encoder (fase A e fase B) possono solo avere quattro
stati: 01, 00, 10, 11, la cui sequenza si inverte quando si inverte la direzione di
rotazione (fig. IV-25b). La terza uscita digitale (index), che si ha una sola volta ad
ogni giro, consente, causando il reset del conteggio, di individuare la posizione ''0'' di
riferimento e quindi l'esatta posizione angolare. Dei filtri digitali sono utilizzati per
eliminare il rumore da cui sono pesantemente influenzati i segnali A, B e index.
Affinchè il controllore del moto possa leggere una data posizione angolare, i segnali
in codice binario dell'encoder vengono poi convertiti in un segnale digitale mediante
un decodificatore di direzione e un contatore up-down, la cui funzione è conteggiare
gli impulsi incrementandoli quando l'albero ruota in una direzione e decrementandoli
quando inverte il senso di rotazione.
164
L. Taponecco - Appunti di Meccatronica
Fig. IV-25a
Fig. IV-25b
In figura IV-26 è riportato un metodo per la decodifica del senso di rotazione basato sull'uso di una PROM e quattro
flip-flop a due stadi del tipo in cui, ad ogni impulso di clock, il segnale passa dall'entrata all'uscita. Applicando
all'ingresso dei primi due flip-flop i segnali A e B , si ottengono ad ogni impulso di clock dalle uscite dei quattro flipflop i loro valori attuali (new) e precedenti (old), la cui combinazione (old A, new A, old B, new B) definisce un
indirizzo a 4 bit per la PROM, a cui corrisponde, in relazione al programma della PROM, il segnale da inviare al
contatore up-down e quindi al microprocessore. Per tale programma si è utilizzato il codice esagesimale (di uso molto
comune in relazione alla diffusione dei microprocessori a 16 bit), cioè un codice binario a 4 bit in cui le lettere da A a F
al posto dei numeri decimali da 10 a 15 consentono di utilizzare display a LED per leggere una sola lettera o una sola
cifra.
165
L. Taponecco - Appunti di Meccatronica
Fig. IV-26
Caratteristiche salienti dell'encoder incrementale (che è il sensore di
posizione/velocità standard industriale) sono: semplicità, buona precisione, costo
relativamente basso e incremento di costo limitato con la risoluzione (standard
fino a 5.000 impulsi/giro). Esso deve però essere inizializzato all'accensione, in
quanto l'informazione che fornisce rappresenta una misura di rotazione
incrementale, inoltre é vulnerabile ai disturbi elettrici (perde l'informazione di
posizione in assenza di alimentazione) e non presenta un funzionamento ottimale
in ampi campi di velocità (se, per ottenere grande precisione alle basse velocità, si
utilizzano dischi con numerose tacche, alle alte velocità, in relazione alla risposta
dinamica dei fototransistor, possono verificarsi dei problemi di lettura e quindi
possibili errori di misura; se, per eliminare tale problema, si utilizzano dischi con
un numero ridotto di tacche, alle basse velocità il sensore presenta minore
precisione).
166
L. Taponecco - Appunti di Meccatronica
L'encoder di tipo ottico, anzichè del tipo ad interruzione (fig. IV-27a), può essere del tipo a riflessione (fig. IV-27b) con
emettitore e ricevitore dalla stessa parte di un disco sulla cui periferia sono uniformente distribuiti in modo alternato
tratti riflettenti e opachi. Il vantaggio è che non é più indispensabile il disco ma é sufficiente disegnare i tratti riflettenti e
opachi su una superficie qualunque del corpo in movimento.
Gli encoder magnetici sono costituiti essenzialmente da un disco, sulla cui periferia sono disposti segmenti magnetici
intervallati con segmenti non magnetici, e da un nucleo ferromagnetico, con un avvolgimento di ingresso ed uno di
uscita, disposto sopra il disco e dimensionato in modo tale da essere o no in saturazione a seconda che si trovi in
corrispondenza di un segmento magnetico o di un segmento non magnetico. In base ai segnali forniti dall'avvolgimento
di uscita si risale allo spostamento angolare. Questo sensore è semplice, robusto, insensibile ad ambienti ostili (alta
temperatura, umidità, dust) e molto affidabile.
Negli encoder (assoluti) a spazzole il disco possiede più anelli concentrici con segmenti conduttori (elettricamente
connessi) intervallati da segmenti isolanti (le cui dimensioni e posizioni radiali variano a seconda dell'anello), su ognuno
dei quali é disposta una spazzola. A seconda che una spazzola sia in contatto con un segmento conduttore o un segmento
isolante, si ha un circuito rispettivamente chiuso o aperto. Pertanto ad esempio con una batteria e delle lampade (fig. IV27c), in base alle differenti combinazioni di spazzole conducenti e non si può risalire alla posizione angolare dell'albero.
Fig. IV-27a
Fig. IV-27b
Fig. IV-27c
167
L. Taponecco - Appunti di Meccatronica
- Encoder assoluto- L'individuazione della posizione angolare assoluta si ottiene in
base ai segnali logici rilevati simultaneamente sulle varie piste di speciali dischi
codificati, che presentano delle fenditure disposte su di una serie di corone circolari
concentriche, ad ognuna delle quali sono associati un trasmettitore ed un ricevitore
(fig. IV-28a). Poichè ad ogni posizione angolare dell'albero corrisponde una data
combinazione di segnali logici di uscita, l'encoder assoluto non richiede nè
inizializzazioni, né decodificatori, nè contatori up-down, mantiene l'informazione di
posizione anche in assenza dell'alimentazione ed è praticamente immune da qualsiasi
disturbo elettrico, però per aumentare la risoluzione si deve aumentare il numero di
piste dell'encoder e quindi i canali di lettura, la circuteria, le dimensioni ed il costo.
Al variare del numero delle piste (da 6 a 20) la corrispondente risoluzione è pari a
quella ottenibile da un encoder incrementale con un numero di tacche che va da 64 a
1.048.576.
Fig. IV-28a
Fig. IV-28b
Il legame tra gli impulsi elettrici rilevati simultaneamente e il numero che essi
esprimono é il codice del trasduttore. Al fine di evitare problemi dovuti all'incertezza
che può nascere quando cambiano contemporaneamente di stato 2 o più bit e
assicurare quindi che la lettura di tutte le posizioni sia inconfondibile e non si
verifichino combinazioni intermedie sbagliate, per la codifica della posizione si deve
infatti utilizzare un codice che nel passaggio da un numero al successivo cambi
sempre solo un bit e cioè il codice binario ciclico o codice Gray e non invece il
codice binario naturale o codice binario assoluto (fig. IV-28b), in cui un piccolo
errore di allineamento nello strumento di lettura può causare un grossolano errore
numerico momentaneo.
168
L. Taponecco - Appunti di Meccatronica
In figura IV-29 è mostrato, a puro titolo indicativo, un confronto tra un encoder
assoluto ed uno incrementale per quanto riguarda la struttura del disco e gli impulsi
in uscita.
Fig. IV-29
L'impiego degli encoder assoluti é considerato: necessario dove disturbi transitori
possono causare pericolo per le persone e/o ingenti danni agli impianti (centrali
termonucleari, controlli anticollisione, presse verticali, antenne radar, ecc.) e dove è
richiesta la conoscenza in tempo reale della posizione assoluta, consigliabile e
vantaggioso dove una interruzione del lavoro o un guasto alla rete di alimentazione
possono causare notevoli perdite e scarti di produzione (robot per verniciatura,
manipolazione, saldatura, controllo di sincronismo in catene di produzione, ecc.).
Un inconveniente di tali encoder è il loro costo elevato e sensibilmente crescente con
la risoluzione.
169
L. Taponecco - Appunti di Meccatronica
IV-4/2b. Sensori di velocità.
- Dinamo tachimetrica. E' una piccola macchina in corrente continua a magneti
permanenti con momento di inerzia molto basso e trascurabile attrito che, portata in
rotazione, fornisce ai morsetti di armatura una tensione continua proporzionale alla
velocità e la cui polarità indica il senso di rotazione. Il commutatore è caratterizzato
da un elevato numero di lamelle per limitare l'ondulazione della tensione di uscita,
che non può essere agevolmente eliminata con un filtro in quanto la sua frequenza
dipende dalla velocità di rotazione.
La parte più critica è costituita dal commutatore meccanico; un accorgimento per
ridurne la manutenzione periodica consiste in un riporto di argento sul collettore
nella zona di contatto con le spazzole.
- Alternatore tachimetrico. Quando la presenza del commutatore meccanico
costituisce un inconveniente inaccettabile si può utilizzare una piccola macchina
sincrona con rotore a magneti permanenti, la cui tensione di uscita viene raddrizzata
e livellata; ciò comporta ritardi e impossibilità di rilevare il senso di rotazione.
- Tachimetro ad induzione. E' una piccola macchina asincrona bifase con rotore a
gabbia in cui uno dei due avvolgimenti statorici è alimentato con una tensione
alternata. A macchina ferma il flusso sviluppato dall'avvolgimento statorico
alimentato non é concatenato col secondo avvolgimento statorico e pertanto in tale
avvolgimento la tensione indotta è nulla. Quando invece la macchina é in moto le
correnti indotte rotoriche provocano uno sfasamento spaziale del flusso sviluppato
dall'avvolgimento statorico alimentato e quindi nell'altro avvolgimento statorico si
induce una tensione (da raddrizzare e filtrare) di ampiezza proporzionale alla
velocità.
Principali difetti sono, oltre a quelli tipici dell'alternatore tachimetrico (ritardi e
impossibilità di rilevare il senso di rotazione, connessi alla necessità di raddrizzare e
filtrare la tensione indotta) la non linearità e il fatto che la tensione di uscita non é
perfettamente nulla a velocità zero a causa di dissimmetrie meccaniche e/o
magnetiche.
- Encoder. Gli encoder incrementali possono essere usati come sensori digitali di
velocità, valore fornito dal numero di conteggi in un dato piccolo periodo di tempo.
Essi però non presentano un funzionamento ottimale in ampi campi di velocità (se,
per ottenere grande precisione alle basse velocità, si utilizzano dischi con numerose
tacche, alle alte velocità, in relazione alla risposta dinamica dei fototransistor,
possono verificarsi dei problemi di lettura e quindi possibili errori di misura).
Prendiamo ad esempio un encoder con 600 tacche pari a 2400 conteggi per giro, se il motore ruota a bassa velocità (60
giri/min) si hanno due conteggi/ms e lo stesso risultato si ha anche quando il motore gira a 50 o 70 giri/min. Per
migliorare la precisione si potrebbe ad esempio effettuare la lettura ogni 5 millisecondi (a spese di un controllo di
coppia meno efficiente) oppure si potrebbe aumentare le tacche dell’encoder (a spese di maggiori costi ed ingombri).
Però se il motore ruota ad alta velocità (3000 giri/min) allora si devono effettuare 120.000 conteggi al secondo, che
corrisponde ad un ordine di grandezza limite per l’elettronica che deve elaborare il segnale; per cui non è possibile
aumentare troppo il numero di tacche dell’encoder.
170
L. Taponecco - Appunti di Meccatronica
IV-4/2c. Sensori di forza (coppia) e di accelerazione.
Il trasduttore comunemente impiegato é l'estensimetro (o strain-gauge). Con tale sensore la misura di una forza (o di una
coppia) é ricondotta al rilievo della variazione di resistenza di un suo elemento strutturale (metallico o semiconduttore)
conseguente alla deformazione elastica subita a seguito della sollecitazione applicata all'elemento su è stato incollato. Se
non si conosce la direzione principale di deformazione si utilizzano rosette estensimetriche e calcolando le dilatazioni in
varie direzioni si determina l'asse principale di deformazione. Un aspetto da tenere presente nella scelta di un
estensimetro è l'intervallo di temperatura nel quale esso deve funzionare, in quanto la sua resistenza dipende, oltre che
dalla deformazione assiale, anche dalla temperatura. Pertanto, poiché negli estensimetri a semiconduttore si ha una
maggiore dipendenza del comportamento dalla temperatura, in applicazioni molto spinte dal punto di vista
dell'escursione della temperatura (ad esempio nei robot spaziali per missioni esterne) è preferibile utilizzare estensimetri
metallici, in modo da rendere meno critico il problema della compensazione in temperatura.
La variazione di resistenza del provino viene misurata mediante un circuito a ponte di Wheatstone (fig. IV-30), in cui
ortogonalmente all'asse di carico viene spesso inserito un estensimetro compensatore per annullare gli effetti della
variazione di temperatura sulla resistenza del circuito.
Fig. IV-30
Gli acceleratori sono sistemi meccanici risonanti aventi come ingresso un'accelerazione e come uscita una posizione, che
può essere convertita in una tensione elettrica adottando una delle tecniche sopra descritte.
IV-4/2d. Sensori di temperatura.
-Termocoppie, si ottengono saldando due filamenti di metalli diversi (ad esempio ferro con rame, o con costantana) e
costituiscono uno dei sensori più diffusi ed affidabili. Esse infatti traducono direttamente la temperatura nel punto di
saldatura in una differenza di potenziale ai due capi liberi, che è piuttosto bassa e dipendente dal tipo di metalli utilizzati
però è molto costante per cui la misura è precisa ed affidabile. Il campo di temperatura entro cui possono lavorare varia
da materiale a materiale (indicativamente tra −100°C e +1000°C, però alcune possono superare i 1500°C). Inconvenienti
tipici di questi sensori sono: necessità di amplificare la misura e di depurarla dalle variazioni della temperatura
ambiente, cavo di collegamento compensato (il cavo di rame quando si unisce ad un elemento della termocoppia forma
un'altra coppia), caratteristica ingresso-uscita spesso non lineare.
-Termoresistenze e termistori, si basano sulla variazione della resistenza con la temperatura di un resistore con elevato
coefficiente di temperatura. Tra le termoresistenze, che sono resistori di tipo metallico ad alta inerzia termica, piuttosto
diffusa è la termoresistenza al platino per la sua notevole stabilità. I termistori sono resistori di tipo a semiconduttore
caratterizzati da dimensioni contenute e bassa inerzia termica, ma hanno caratteristiche non lineari. La temperatura
limite di impiego è generalmente 600oC, ma è possibile avere sonde che lavorano fino a 1000oC.
-Termometri a riempimento, sfruttano la proprietà di un gas o di un liquido di variare il suo volume con la
temperatura. La dilatazione del fluido agisce su di un leveraggio che apre o chiude un contatto elettrico. La loro
prontezza di risposta dipende dal fluido impiegato: quelli a gas sono più veloci di quelli a liquido. Il campo di
variazione della temperatura di funzionamento é limitato rispetto a quello delle termocoppie. Un loro impiego si ha nei
frigoriferi.
-Bimetalli, dispositivi realizzati collegando rigidamente due lamine di metalli con differente coefficiente di dilatazione
lineare; al variare della temperatura, variando in modo diverso la loro lunghezza modificano la piegatura della lamina
composta che può comandare direttamente l'apertura e la chiusura di un contatto elettrico. Molto robusti e con un campo
di impiego abbastanza ampio (da −150° a +500°), i bimetalli sono usati in regolazioni grossolane di temperatura, ad
esempio nei ferri da stiro elettrici.
Bimetalli e termometri a riempimento sono sensori di tipo on-off con tempi di risposta lenti e precisione e ripetibilità di
misura non eccezzionali.
-Pirometri a radiazione, dispositivi che misurano l'energia irradiata dal corpo di cui si vuole misurare la temperatura.
171
L. Taponecco - Appunti di Meccatronica
IV-5. Controllori.
I controllori, in base alle informazioni ricevute dall'organo di riferimento (o dal
regolatore dell'anello immediatamente più esterno) e dall'organo di misura,
forniscono dei segnali utili a correggere qualsiasi allontanamento, causato da
variazioni funzionali del sistema e/o da variazioni del comando, della variabile di
processo dal suo valore di riferimento.
Il loro scopo è infatti fare in modo che il sistema retroazionato, oltre ad essere
stabile, sia caratterizzato nel funzionamento a regime stazionario da una piccolissima
deviazione della variabile controllata dal valore desiderato e nei transitori da un
comportamento dinamico tale da consentire un rapido raggiungimento della nuova
condizione di regime; fare in modo cioè che la variabile di processo segua più
strettamente possibile il suo valore di riferimento indipendentemente dalla presenza
o meno di disturbi.
In un comportamento ideale la variabile controllata dovrebbe rimanere inalterata in
presenza di un disturbo e seguire prontamente e senza oscillazioni qualsiasi
cambiamento della variabile di comando con errore nullo a regime. Nella realtà
l'effetto ritardante di vari componenti del sistema ostacola questo comportamento
ideale.
Una misura del comportamento dinamico di un sistema retroazionato è fornita dalle
sue risposte indiciali a seguito di una variazione a gradino del comando e del
disturbo e viene espressa in termini di tempi di salita e di assestamento (intervalli tra
la variazione a gradino del comando o del disturbo e rispettivamente il primo e
l'ultimo ingresso della variabile controllata nella banda di tolleranza attorno al valore
di regime) e di massima sovraelongazione.
Il controllore é seguito spesso da un limitatore, per evitare interventi troppo brutali
quando si verificano fenomeni transitori di notevole entità, e da un filtro per ridurre
l'ondulazione del segnale di uscita.
L'imposizione di una assegnata traiettoria alla variabile di processo del sistema
controllato si ottiene comparando il valore di riferimento Vr della variabile (di
polarità positiva rispetto al punto zero comune) con il valore reale V (di polarità
negativa), rilevato direttamente o indirettamente mediante opportuni sensori. La
comparazione avviene con l'aiuto di due resistenze di precisione connesse
all'ingresso invertente di un amplificatore operazionale [dispositivo elettronico in
grado di compiere operazioni matematiche, quali: somma, differenza, integrazione,
derivazione, ecc., su segnali elettrici analogici forniti sotto forma di tensione]
opportunamente retroazionato.
L'ingresso non invertente é connesso al punto zero comune mediante una resistenza
R0 di valore uguale al parallelo delle resistenze connesse alla entrata invertente.
Nel dominio dell'elettronica industriale è indispensabile che la tensione di riferimento e la tensione reale possiedano
polarità differenti poiché l'uso di entrambe le entrate dell'amplificatore operazionale, per effettuare la differenza tra i
valori di riferimento e reale, comporterebbe delle difficoltà per l'elaborazione delle reti di retroazione,
172
L. Taponecco - Appunti di Meccatronica
I controllori standard largamente utilizzati in campo industriale sono caratterizzati da
una rete di retroazione che ha una struttura fissa (di tipo P, I, PI, PD, PID) e da
parametri che, dimensionati per una certa condizione di lavoro, restano fissi durante
il funzionamento. La regolazione è dunque relativa ad una determinata condizione di
funzionamento; pertanto se il sistema si allontana sensibilmente da tale condizione si
possono verificare smorzamenti non più soddisfacenti e anche instabilità. In tali casi
può essere opportuno ricorrere a controllori adattativi, in cui o i parametri o la
struttura della rete di retroazione sono variabili in relazione alle condizioni di
funzionamento del sistema controllato, in modo che il circuito di regolazione risulti
sempre stabilizzato in maniera ottimale.
IV-5/1. Configurazione generale dei controllori standard.
Per il dimensionamento della rete di retroazione degli amplificatori operazionali si
assumono le seguenti ipotesi semplificative: guadagno infinito, impedenza di
ingresso infinita, impedenza di uscita nulla e correnti di ingresso nulle; inoltre negli
schemi a blocchi dei circuiti di regolazione non si tiene conto di eventuali
cambiamenti di segno dei regolatori, in quanto dipendenti dalla realizzazione
particolare di questi dispositivi; mentre se ne tiene conto nella realizzazione pratica.
Per un generico amplificatore operazionale (fig. IV-31) con impedenza della rete di
retroazione Z1(s), nell'ipotesi di correnti di ingresso nulle al suo ingresso invertente
si ha: Vr/Rr−V/R+Vu/Z1(s) = 0 . Introducendo con l'aiuto delle tensioni nominali di
riferimento Vn , Vrn e Vun (corrispondenti ad un solo punto di funzionamento) le
grandezze relative: v=V/Vn , vr=Vr/Vrn e vu=Vu/−Vun (la tensione Vu é stata rapportata
a −Vun affinché il cambiamento di segno dovuto all'amplificatore operazionale non
appaia nelle relazioni espresse in grandezze relative) si ottiene:
vu = [Z1(s)Vrn/RrVun] [vr−(RrVn/RVrn) v].
Poichè vu deve essere proporzionale allo scarto di regolazione vr−v deve essere:
RrVn/RVrn=1 (criterio per la scelta di R e Rr valido per qualsiasi tipo di controllore)
GR(s) = vu/(vr−v) =Z1(s)Vrn/RrVun
e per annullare l'influenza della corrente di polarizzazione R0 deve essere uguale alla
resistenza equivalente connessa all'entrata invertente: R0 = 1/(1/Rr+1/R+1/R1) .
Fig. IV-31
Fig. IV-32
173
L. Taponecco - Appunti di Meccatronica
IV-5/1a. Controllore P (proporzionale). Il circuito di retroazione (fig. IV-32) é
costituito da una resistenza R1; pertanto dalla configurazione generale si deduce:
GR(s) = R1Vrn/RrVun = k
Questo controllore fornisce una risposta rapida e permette un controllo fine della
variabile di processo poiché la sua uscita varia proporzionalmente allo scarto di
ingresso. Esso però non è in grado di mantenere nullo il segnale di errore (può solo
ridurlo aumentando il guadagno), in quanto quando lo scarto di ingresso si annulla la
sua uscita si azzera e ciò causa l'allontanamento della variabile di processo dal
desiderato riferimento; quindi il sistema non si stabilizza mai, ma fluttua attorno al
riferimento. Un aumento del guadagno proporzionale comporta una diminuzione del
tempo di salita, ma anche più elevate sovra elongazioni.
IV-5/1b. Controllore I (integrale). Il circuito di retroazione é costituito da un
condensatore C1 ; pertanto dalla configurazione generale si deduce la seguente f.d.t.:
GR(s) = 1/(sRrC1Vun/Vrn) = 1/sτi .
Questo controllore ha il compito di ridurre l'errore statico a regime e di mantenerlo
nullo in presenza di disturbi costanti sulla variabile d'uscita, in quanto, essendo la
rapidità di variazione del segnale di uscita proprozionale al segnale di ingresso,
quando l'ingresso si annulla l'uscita mantiene il valore che aveva all'istante di
annullamento del segnale di ingresso (tiene conto cioè della ''storia passata'' del
sistema). Dal punto di vista dinamico l'azione integrale porta ad un peggioramento
dei margini di stabilità in quanto introduce nella funzione di trasferimento a catena
aperta un ritardo di fase pari a π/2.
Raramente usato da solo a causa della sua scadente velocità di risposta, è molto usato
in unione con un controllore P.
Nelle figure IV-33a e IV-33b sono mostrati un tipico regolatore P e un tipico
regolatore I costituiti da tre amplificatori operazionali.
Fig. IV-33a
Fig. IV-33b
IV-5/1c. Controllore PI. In questo controllore, in cui si completano naturalmente le
caratteristiche di risposta rapida del controllore P e di errore nullo a regime del
controllore I, il circuito di retroazione (fig. IV-34a) è costituito da un condensatore
C1 in serie ad una resistenza R1, si ha pertanto Z1(s) = R1+1/sC1 e quindi:
GR(s)=[(1+sR1C1)/sRrC1](Vrn/Vun)=(1+sτn)/sτi
174
L. Taponecco - Appunti di Meccatronica
In figura IV-34b è riportato il modulo della risposta armonica |GR(jω)|, ottenuto
rimpiazzando s con jω nella f.d.t. GR(s), tracciato in modo approssimato mediante
due rette, con una pulsazione di taglio per ω=1/τn .
a)
b)
c)
Fig. IV-34
La risposta indiciale, utile per la determinazione sperimentale di τn e τi, è:
γR(t) = L-1 [GR(s)/s] = t/τi+τn/τi .
γR(t) tende all'infinito per t che tende all'infinito (fig. IV-34c), in realtà la sua
ampiezza è limitata dalla tensione di saturazione dell'amplificatore operazionale.
Per il dimensionamento di un regolatore PI
-si determinano i valori delle costanti di tempo τn e τi , che devono essere tali da
assicurare che il circuito di regolazione sia stabile e ben smorzato;
-si scelgono poi i valori di R e Rr (10÷100 kΩ), tenendo conto del carico ammissibile
per gli organi di misura e di riferimento e della relazione: Rr/R = Vrn/Vn ;
-si deducono infine i valori di
C1 = τiVrn/RrVun
e
R1= τn/C1
Per trovare il valore ottimale delle costanti di tempo e quindi dei parametri del regolatore si può usare il montaggio di
figura IV-35a, da cui, indicando con Ri la quantità 1/[1/ρR+1/(1−ρ)R], si ottiene: vu ={[1+s(R1+Ri) C1]/sρRrC1}
(Vrn/Vun) (vr−v) e quindi:
τn = (R1+Ri) C1 ≅ R1C1 (per Ri<<R1, condizione normalmente soddisfatta)
τi = ρRrC1Vun/Vrn .
Aumentando ρ la risposta armonica si sposta verso il basso diminuendo la componente proporzionale e mantenendo
invariata la pulsazione di taglio ω = 1/τn; aumentando R1 la pulsazione di taglio si sposta verso sinistra aumentando
la componente proporzionale e lasciando inalterata la componente integrale (fig. IV-35b).
Fig. IV-35a
Fig. IV-35b
IV-5/1d. Controllore D (derivativo). Nei casi in cui il sistema, in relazione alla sua
inerzia, risponde lentamente, il controllore deve sviluppare un segnale correttivo
elevato, che se rimane elevato sovracompensa l'errore e porta il sistema in
oscillazione. Serve quindi nei confronti dei bruschi disturbi un'azione correttiva
inizialmente elevata che diminuisce nel tempo, ottenibile con un controllore
175
L. Taponecco - Appunti di Meccatronica
derivativo, la cui uscita è proporzionale alla velocità di variazione del suo ingresso.
L'azione derivativa migliora i margini di stabilità in quanto introduce un anticipo di
fase pari a π/2 e fornisce una correzione che anticipa l'andamento dell'errore nel
tempo. Un inconveniente è che risponde solo a variazioni del segnale errore, per cui
se il sistema presenta un errore a regime non interviene. Inoltre l'aumento della banda
passante porta ad amplificare i segnali con contenuto armonico a frequenze elevate
(come il rumore sovrapposto al segnale utile). Per tali motivi comunemente negli
azionamenti elettrici, il controllore derivativo non viene impiegato e si utilizzano
quasi esclusivamente regolatori di tipo PI.
IV-5/1e. Controllore PID ideale. La f.d.t. dei controllori PID in base allo schema di
principio si ottiene:
GR(s) = {[(1+sR1C1)(1+sR2C2)+sR2C1]/sRrC1}(Vrn/Vun) = (1+sτn) (1+sτv)/sτi =
= 1/sτi + (τn+τv)/ τi + sτnτv/τi ,
con: τi = RrC1Vun/Vrn = RC1Vun/Vn
τn , τv = [(R1C1+R2C2+R2C1)/2]±√{[(R1C1+R2C2+R2C1)/2]2−R1C1R2C2}
con δ(t) impulso di Dirac.
e
γR(t) = t/τi+(τn+τv)/ τi +δ(t) τnτv /τi
In figura IV-36 sono riportati lo schema di un controllore PID, l’andamento del
modulo della sua risposta armonica (tracciato in modo approssimato mediante tre
rette) e della sua risposta indiciale.
Fig. IV-36
Nella realtà i controllori PDI hanno anche dei poli in alta frequenza non presenti
nella funzione di trasferimento sopra riportata, in quanto essendo al di fuori del
campo di interesse vengono trascurati.
Il controllore PID può essere messo a punto empiricamente variando uno o più valori dei guadagni e osservando come si
modifica la risposta del sistema. Si pongono uguali a zero i guadagni integrale e derivativo e si aumenta il guadagno
proporzionale fino a che il sistema risponde bene a variazioni del punto di regolazione senza eccessive
sovraelongazioni. Scelto un ragionevole valore del guadagno proporzionale si aumenta quindi lentamente il guadagno
integrale per forzare a zero l'errore del sistema. Nella maggior parte dei casi è richiesto un piccolo valore del guadagno
integrale, in quanto se abbastanza grande, può sopraffare l'azione del termine proporzionale, rallentare la risposta
globale e far oscillare il sistema attorno al punto di regolazione. In tale caso il problema si risolve usualmente riducendo
il guadagno integrale ed aumentando il guadagno proporzionale. Nel controllo dei motori normalmente il guadagno
derivativo del controllore PID è mantenuto nullo (il termine derivativo viene infatti implementato solo nel caso di
carichi con inerzia molto elevata).
176
L. Taponecco - Appunti di Meccatronica
IV-5/2. Controllori adattativi.
Le caratteristiche funzionali dei controllori standard sono determinate dalla struttura
del loro circuito di retroazione e dai valori assunti delle relative resistenze e capacità;
struttura e valori che, una volta scelti in relazione ad una data specifica applicazione,
restano fissi. Pertanto, nel caso di sensibili variazioni delle condizioni di
funzionamento ipotizzate nella fase di progettazione del controllore dell'azionamento
e qualora si richiedono al sistema controllato prestazioni elevate, é necessario fare
ricorso a controllori adattativi Questi sono essenzialmente di due tipi:
- a struttura fissa e parametri variabili;
- a parametri fissi e struttura variabile.
I controllori adattativi a struttura fissa e parametri variabili si ottengono inserendo
nel loro circuito di retroazione uno o più moltiplicatori. Ad esempio in figura IV-28a
è rappresentato lo schema di un controllore PI nel cui circuito di retroazione è stato
inserito un moltiplicatore con in ingresso la tensione Vu e una tensione di controllo
variabile con continuità Vv .
In tale caso, indicando con km la costante del moltiplicatore, essendo
vu= [(1+sR1C1)/sRrC1] (Vrn/kmVvVun) (vr−v) :
si ottiene:
τn = R1 C1
τi = RrC1 kmVv (Vun /Vrn) .
da cui risulta che è adattativa la costante di tempo di integrazione τi del controllore .
Inserendo nel circuito di retroazione due moltiplicatori (fig. IV-28b) é possibile
adattare entrambe le costanti di tempo indipendentemente l'una dall'altra mediante
due tensioni di controllo.
Fig. IV-28a
Fig. IV-28b
Poiché il sistema di ritardo del primo ordine, contenente il moltiplicatore M1, cambia il segno tra le tensioni Vu e Vi, é
necessario applicare al secondo moltiplicatore la tensione di controllo Vvi con polarità negativa. In tale caso il segnale di
uscita dal regolatore é:
vu = [(1+sR1C1kmnVvn)/sRrCkmiVvi] (Vrn/Vun) (vr−v) e quindi: τn = R1C1kmnVvn e τi = RrCkmiVvi (Vun/Vrn)
é quindi possibile adattare le due costanti di tempo indipendentemente l'una dall'altra grazie alle tensioni di controllo Vvi
e Vvn.
In modo analogo si può anche realizzare un regolatore PID adattativo.
177
L. Taponecco - Appunti di Meccatronica
In figura IV-29 é riportato lo schema di principio di un controllore adattativo a
parametri fissi e struttura variabile a due stadi che permette il passaggio da una
struttura PI ad una struttura I e viceversa: il primo stadio presenta una struttura
variabile di tipo PD o P, a seconda di quale delle due reti di retroazione viene attivata
mediante i tasti c1 e c2, il secondo stadio presenta una struttura fissa di tipo I.
Fig. IV-29
Con c1 chiuso si ha:
Vi=−{[R1(1+sR2C2)+R2]/Rr}(Vr−VRr/R) e Vu= −Vi/sR'C;
eliminando Vi e utilizzando grandezze in per unit si ottiene:
GR(s) = [(R1+R2)/R']{[1+sR1R2C2/(R1+R2)]/sRrC} (Vrn/Vun),
espressione che corrisponde a quella di un regolatore PI con
τn = R1R2C2/(R1+R2) e τi = [R'RrC/(R1+R2)]/(Vun/Vrn);
Con c2 chiuso si ottiene invece: GR(s) = (R3/sRrR'C)(Vrn/Vun),
espressione che corrisponde a quella di un regolatore I con
τi = [R'RrC/R3]/(Vun/Vrn).
Un vantaggio dei controllori a due stadi consiste nell'assenza, durante le commutazioni da una struttura all'altra, di salti
di tensione sul segnale di uscita e quindi di discontinuità nel circuito di regolazione; cosa che invece si potrebbe
verificare se si utilizzasse un unico stadio avente struttura di tipo PI o I a seconda dello stato di conduzione dei tasti.
Un caso tipico in cui é conveniente l'uso di un regolatore adattativo é il deflussaggio di un motore c.c..
178
L. Taponecco - Appunti di Meccatronica
IV-5/3. Considerazioni sulla scelta e sul dimensionamento del controllore.
Negli azionamenti elettrici il sistema elettromeccanico da regolare, anche se ordine
elevato, presenta un comportamento dinamico simile a quello di un sistema del
secondo ordine; esso possiede infatti normalmente: due costanti di tempo dominanti
(meccanica τm e elettrica τa), che rallentano la dinamica del sistema, e una serie di
piccole costanti di tempo τpk (e/o di piccoli ritardi) prodotti da organi di comando,
filtri e circuiti ausiliari di regolazione, il cui effetto si estingue rapidamente. La loro
f.d.t é quindi del tipo:
GS(s) = K / [(1+sτm) (1+sτa) (1+sτp1). . .(1+sτpn)] ≅ K / [(1+sτm) (1+sτa) (1+sτp)]
con K fattore di trasferimento e τp (= Στpk) piccola costante di tempo equivalente.
E' pertanto necessario utilizzare uno o più controllori in cascata, al fine di
compensare le costanti di tempo dominanti del sistema da regolare e mettere un polo
nell'origine, la cui assenza comporta un errore a regime nella risposta a gradino. Se si
utilizza un controllore PID, la f.d.t. del circuito di regolazione ad anello aperto é:
G0(s) = GR(s) GS(s) = {[(1+sτn) (1+sτv)]/ sτi} {K /[(1+sτm) (1+sτa) (1+sτp)]}.
e scegliendo (fig. IV-30) τn=τm e τv=τa : G0(s) = K/[sτi(1+sτp)] = 1/[sτ1(1+sτp)].
L'analisi degli andamenti del modulo e della fase [ϕ = −90°−arctang(ωτp)] della
risposta armonica del circuito di regolazione ad anello aperto G0(jω) ci fornisce
informazioni (fig. IV-31): sulla stabilità del sistema controllato (a seconda che
l'attraversamento per lo zero avvenga con pendenza −1 o maggiore) e sul suo
comportamento dinamico (rapidità di risposta e smorzamento), che dipende dal
margine di fase: ϕM = 90°−arctang(τp/τ1) [cioè dalla differenza tra la fase ϕ per
ω=ω1=1/τ1 = −90° − arctang(ω1τp) e −180° e quindi dal rapporto tra la pulsazione di
taglio e quella di attraversamento dello zero] .
Fig. IV-30
Fig. IV-31
Dall'analisi della risposta indiciale (fig. IV-32) del circuito di regolazione ad anello
chiuso γ'(t) = L−1[G'(s)/s] = L−1[G0(s)/s{1+G0(s)}] = L−1[1/s{1+sτ1(1+sτp)}], si deduce
che il valore ottimo del rapporto τp/τ1 deriva da un compromesso (fig. IV-33) tra i
valori massimi accettabili: della sovraelongazione ∆γ'max = γ'max−1 = e−π/√[(4Tp/T1)−1]
179
L. Taponecco - Appunti di Meccatronica
(normalmente ≤ 0,1 cui corrisponde τp/τ1≤0,7) e del tempo di salita tm =
{2τp/√[4(τp/τ1) −1]} {π−arctang√[4(τp/τ1)−1]} (normalmente ≤ 6τp cui corrisponde
τp/τ1≥0,4). Il valore ottimo del rapporto τp/τ1 é quindi compreso tra 0,4 e 0,7 e il
corrispondente margine di fase ϕM tra 55° e 68°; scegliendo τp/τ1 = 0,5 si ottiene:
τi = 2Kτp
e quindi
G0(s) = 1/[s2τp(1+sτp)] e G'(s) = 1/[1+s2τp(1+sτp)].
Questo criterio equivale ad imporre poli complessi coniugati con parte reale uguale a quella immaginaria, è identico cioè
a quello ottenibile in base all'equazione caratteristica del sistema ad anello chiuso.
Pertanto, con le scelte delle costanti di tempo del controllore effettuate, il sistema é
stabile e la rapidità di regolazione non dipende piú dalle caratteristiche del motore
o della macchina azionata ma solo dalla piccola costante di tempo equivalente τp.
Fig.IV-32
Fig.IV-33
Per il dimensionamento di un controllore PID, determinati τn τv e τi e scelti i valori di R e Rr , si deducono, tenuto
conto che: τn+τv = R1C1+R2 (C1+C2) e τnτv = R1C1R2C2 e assunto C2>>C1 (in quanto, perché la rete di retroazione sia
realizzabile, deve essere ∆≥0 cioè (C1+C2)/C2≤(τn+τv)2/4τnτv, condizione generalmente soddisfatta se si fissa C2>>C1) :
C1 = τiVrn/RrVun = τiVn/RVun
R1 = 1/2 C1 [(τn+τv) + √(τn+τv)2 − 4 τnτv (C1+C2)/C2]
R2 = 1/2 (C1+C2) [(τn+τv) − √(τn+τv)2 − 4 τnτv (C1+C2)/C2].
Per trovare il valore ottimale delle costanti di tempo si può usare il montaggio di figura IV-34, in cui, per poter regolare
in maniera indipendente τn e τv, si inserisce nella rete di retroazione un amplificatore operazionale montato ad
inseguitore di tensione che opera il disaccoppiamento di impedenze dei due circuiti RC in quanto realizza una
impedenza di ingresso grandissima e una impedenza di uscita piccolissima; in tal caso si ottiene: vu ≅ [(1+sR1C1)
(1+sR2C2)/sρRrC1] (Vrn/Vun) (vr−v) e quindi: τi = ρRrC1Vun/Vrn τn = R1C1 τv=R2C2.
La costante di tempo del regolatore τi può essere determinata anche in base all'equazione caratteristica del sistema ad
anello chiuso che, essendo: G'(s) = 1/[1+sτi(1+sτcm)rt/kcm] e posto τ1= τirt/kcm e τp= τcm, é: s2τ1τp+sτ1+1 = 0. Poichè per
avere una risposta rapida e ben smorzata é bene scegliere poli complessi e coniugati con parte reale (negativa) uguale a
quella immaginaria, deve essere: s1, s2 = {−τ1±√[τ12−4τ1τp]}/2τ1τp = −ρ ± jρ e quindi √[τ12−4τ1τp] = jτ1 ⇒ τ1 = 2τp.
Fig. IV-34
180
L. Taponecco - Appunti di Meccatronica
La regolazione in cascata, comunemente adottata negli azionamenti elettrici, richiede
però, dato che il sistema da regolare presenta due costanti di tempo dominanti
(meccanica e elettrica), la sua decomposizione in due sottosistemi, ognuno con una
sola costante di tempo dominante ed un controllore (in genere di tipo PI).
In questo caso l'uso di regolatori PID consentirebbe in linea teorica di compensare oltre alla costante di tempo
dominante anche la piccola costante di tempo τp e la f.d.t. risultante del circuito di regolazione ad anello aperto si
ridurrebbe a G0(s) = K/sτi = 1/sτ1 , con andamenti del modulo della risposta armonica e del margine di fase costanti e
pari a −1 e 90°, e quindi la rapidità di regolazione potrebbe essere aumentata a piacere (τ1→0) senza rischio di
instabilità. In realtà però, anche se l'analisi del comportamento dinamico del sistema si effettua rimpiazzando le varie
piccole costanti di tempo con la loro somma τp , non si deve effettuare la compensazione di τp in quanto si tratta di un
polo fittizio. Conviene quindi utilizzare un regolatore PI e lasciare che τp determini la dinamica del sistema.
Per il dimensionamento dei regolatori PI si parte dall'anello di corrente più interno
e, procedendo in modo analogo a quanto fatto per il regolatore PID, si ottiene:
e
Gi'(s) = 1 / [1+s2τp/i(1+sτp/i)] ≅ 1 / [1+s2τp/i].
G0/i (s) = 1 / [s2τp/i(1+sτp/i)]
Si passa quindi all'anello esterno di velocità e si dimensiona τn/n e τi/n.
IV-5/4. Approssimazioni connesse all'uso di una piccola costante di tempo equivalente al posto delle varie
piccole costanti di tempo e piccoli ritardi effettivi.
- Caso di varie piccole costanti di tempo τp1, τp2, . . . , τpn .
Trascurando i termini proporzionali a s2, s3, sn, in quanto le costanti di tempo sono piccole, si ottiene:
G0(s) = K/[sτi(1+sτp1) (1+sτpn)] ≅ K/[sτi(1+sΣτpk)] = K/[sτi(1+sτp)].
Poichè il termine sτi provoca una fase costante di −90°, se si ammette un margine di fase di 60°, la fase dovuta alle
varie piccole costanti di tempo o alla piccola costante di tempo equivalente non deve oltrepassare 30° in corrispondenza
della frequenza di cross-over. Per dare un'idea della validità dell'approssimazione fatta é stato preso in esame il caso di n
piccole costanti di tempo uguali a τp/n sono stati determinati gli andamenti in funzione di Ωτp della fase ϕ di
1/(1+sτp/n) n per più valori di n ; i risultati ottenuti mostrano (fig. IV-35a) un'ottima concordanza per Ωτp ≤ 0,6 cioè
nel dominio che é determinante per il margine di fase di 60° in vicinanza del punto critico (ϕ ≅ −30°).
- Caso di un piccolo ritardo τcm dovuto all'organo di comando.
Per quanto riguarda la sostituzione di un piccolo ritardo con una piccola costante di tempo [kcme-sTcm ≅ kcm/(1+sτcm)]
l'esame dell'andamento della fase della funzione esatta e di quella approssimata evidenziano (fig. IV-35b) una buona
concordanza per Ωτcm ≤ 0,6.
- Caso di una piccola costante di tempo introdotta da un circuito di regolazione ausiliario.
L'andamento della fase della funzione esatta 1/[1+s2τp(1+sτp)] e di quella approssimata 1/[1+s2τp] evidenziano (fig.
IV-35c) una sufficiente concordanza per Ω2τp ≤ 0,6.
a)
b)
c)
Fig. IV-35
181