8.
Oscillazioni
Definizione di oscillatore armonico libero
Si tratta di un sistema soggetto ad un moto descrivibile secondo una funzione armonica (seno
o coseno) del tipo
x(t) = Acos( 0 t + )
A è l’ampiezza del moto (x oscilla fra –A e +A). La pulsazione naturale è 0, a cui
corrisponde un periodo del moto T = 2 / 0 e una frequenza = 0 /2 = 1/T (misurata in
Hertz). Infine è la fase, cioè un numero (radianti) che dipende dalla definizione dell’istante
t=0.
Osserviamo subito che
a=
d2x
= A 02 cos( 0 t + ) = 02 x
dt 2
Questa è esattamente l’accelerazione a cui è soggetta una massa attaccata ad una molla con
costante elastica k, nel piano orizzontale:
m a = k x
in cui si individua immediatamente la pulsazione naturale (o propria): 02 = k /m .
L’energia totale per un oscillatore armonico libero è costante:
1
1
E = mv2 + k x2
2
2
1
1
1
E = m 02 A 2 sin 2 ( 0 t + ) + k A 2 cos2 ( 0 t + ) = k A 2
2
2
2
In generale, tutti i sistemi meccanici per i quali l’accelerazione risulta del tipo a = 02 x sono
oscillatori armonici liberi (non sottoposti ad altre forze).
Esempio: calcolare la frequenza di oscillazione di un pendolo costituito da un filo con
attaccata una massa m, che descriva oscillazioni con piccoli angoli (pendolo semplice).
Scrivendo la legge di Newton nella direzione tangente all’arco di traiettoria circolare
descritta:
m
dv
= m gsin dt
v=
d(L )
d
=L
dt
dt
Trattandosi di piccole oscillazioni:
g
d 2
2
L
dt
Da cui si deducono la pulsazione e la frequenza:
0 = 2 =
g
L
Essendo l’oscillatore armonico necessariamente conservativo, la sua equazione del moto può
anche essere ricavata imponendo che l’energia meccanica totale sia costante e prendendone la
derivata rispetto alla direzione o angolo secondo i quali avviene l’oscillazione.
Nel caso del pendolo semplice, misurando l’energia potenziale della forza peso come
U(y) = m g y = m g ( L L cos ) = m g L (1 cos ) abbiamo:
1
d
E = m v 2 + m g L (1 cos ) con v = L
2
dt
Imponendo che dE/dt=0:
m
d d 2
d
+ m g L sin = 0
2
dt dt
dt
da cui nell’approssimazione di angoli piccoli si riottiene l’equazione di moto del pendolo
semplice!
Oscillatore forzato
A differenza di quello libero, oltre alla forza “di richiamo” esiste almeno un’altra forza
agente:
ma = k x + F
Se la forza F è costante cambia semplicemente il punto di equilibrio rispetto al quale
avvengono le oscillazioni.
Se è armonica anch’essa, F(t) = F0 cos( t ) , determina la frequenza e l’ampiezza delle
oscillazioni del sistema. Nel caso particolare in cui = 0 = k /m si parla di risonanza.
Esempio: una molla con costante elastica k è attaccata ad un soffitto e regge all’altra
estremità una massa m. Determinare la posizione di equilibrio della massa m. Se da questa
posizione m viene tirata verso il basso di una quantità s e poi lasciata libera, determinare
l’ampiezza e la frequenza delle oscillazioni.
La legge di Newton per la massa è:
m a = k x + m g
avendo assunto l’origine dell’asse di riferimento, x=0, coincidente con la posizione di riposo
dell’estremo inferiore della molla (senza m attaccata).
La posizione di equilibrio xe per definizione corrisponde a v=0 e a=0, quindi x e = m g /k .
Se ora m viene abbassata di una quantità s e poi rilasciata, ci aspettiamo un moto oscillatorio
in su e in giù, simmetrico rispetto alla posizione di equilibrio:
x(t) = x e + Acos( 0 t + )
Infatti sostituendo questa legge nell’equazione del moto si ottiene:
m 02 Acos( 0 t + ) = k x e k Acos( 0 t + ) + m g
che è evidentemente un’identità purchè 0 = k /m , che stabilisce la frequenza propria.
Per determinare ampiezza e fase imponiamo le condizioni iniziali del moto:
x(0) = x e + s
v(0) = 0
x e + Acos = x e + s
0 Asin = 0
da cui si ottiene A=s e =0, per cui x(t) = x e + scos( 0 t ) : le oscillazioni avvengono
effettivamente in maniera simmetrica attorno alla posizione di equilibrio.
In alternativa, si poteva sfruttare la conservazione dell’energia, che stabilisce la
corrispondenza tra quota raggiunta e velocità:
1
1
1
2
m v 2 (x) + k x 2 m g x = k ( x e + s) m g ( x e + s)
2
2
2
Gli estremi di oscillazione si possono ricavare imponendo che v=0, mentre la frequenza di
oscillazione si può calcolare prendendo la derivata di quest’equazione rispetto a x, come fatto
per il pendolo semplice.
Oscillatore libero smorzato
Consideriamo oltre alla forza elastica anche una forza di attrito viscoso proporzionale e
opposta alla velocità:
a=
k
dx
x m
dt
limitiamoci a considerare uno smorzamento sufficientemente debole da ritenere il moto
ancora armonico con la sua frequenza propria ma con un lento smorzamento di ampiezza:
x(t) = A(t)cos( 0 t)
Si noti che nei casi precedenti l’ampiezza era sempre costante nel tempo!
Per determinare come varia l’ampiezza nel tempo possiamo valutare la potenza media su un
periodo di oscillazione ceduta dall’oscillatore per effetto dell’attrito, assumendo l’ampiezza
pressochè costante in un singolo periodo di oscillazione:
1 t +T
dE
= f a v = [ m v 2 (t)]dt
T t
dt
dE m
=
dt
T
t +T
t
2
0
A 2 (t) sin 2 ( 0 t ) dt
1
Poichè la media di sin2 su un periodo è , e dato che E(t) = k A 2 (t) :
2
dA m 02 A 2
kA
=
dt
2
dA
A
, da cui A(t) = A(0)e
=
dt
2
t
2
Quindi il moto oscillatorio debolmente smorzato da una forza di attrito viscoso con costante è caratterizzato da un decadimento esponenziale dell’ampiezza di oscillazione, lento rispetto
al periodo di oscillazione:
x(t) = A(0)e
t
2
cos( 0 t)
Nel caso di smorzamento forte non è più possibile fare le stesse ipotesi usate in questo
calcolo: addirittura lo smorzamento completo (dissipazione dell’energia) può avvenire senza
che si sia compiuta una singola oscillazione!
Oscillatore armonico forzato (caso generale)
Consideriamo un termine forzante del tipo F(t) = F0 cos( t ) . Consideriamo ancora una forza
di attrito proporzionale e opposta alla velocità. L’equazione generale del moto per
l’oscillatore armonico forzato e smorzato è quindi
F
d2x
dx
+
+ 02 x = 0 cos( t)
2
dt
dt
m
Trascurando l’intervallo di tempo necessario perchè l’oscillatore raggiunga una situazione di
“regime” a partire dalle sue condizioni iniziali, possiamo ritenere su basi intuitive che dopo
un tempo sufficientemente lungo la forza F detti il ritmo di oscillazione secondo la sua
frequenza, per cui
x(t) = Acos( t + )
Sia l’ampiezza che la fase dipenderanno dalla frequenza forzante .
Per determinare A e dobbiamo calcolare le derivate di x(t) e sostituirle nell’equazione del
moto. Sfruttando le proprietà
sin( + ) = sin cos + cos sin cos( + ) = cos cos sin sin Abbiamo infine:
[(
2
0
]
[
]
2 ) cos sin Acos( t) + ( 2 02 ) sin cos Asin( t) =
F0
cos( t)
m
Affinchè un’identità del tipo P sin( t) + Qcos( t) = 0 sia rispettata per ogni istante t occorre
che i coefficienti delle funzioni seno e coseno siano nulli, cioè P=Q=0:
[
[
]
]
2
F
2
( 0 ) cos sin A = 0
m
( 2 02 ) sin cos A = 0
Dalla seconda relazione si ottiene la fase (supposta A0):
tan ( ) =
02
2
Elevando a quadrato entrambe le relazioni e sommando membro a membro si ottiene
l’ampiezza:
A( ) =
F0 /m
(
2
02 ) + 2 2
2
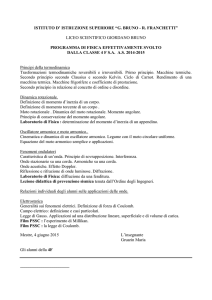
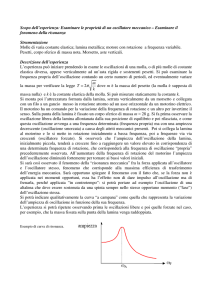
È utile rappresentare graficamente l’andamento di ampiezza e fase in funzione della
frequenza: per semplicità introduciamo una frequenza e uno smorzamento normalizzati
rispetto alla frequenza propria, = / 0 e = / 0 .
Per capire il significato fisico del notevole aumento di ampiezza per frequenze prossime alla
risonanza per piccoli smorzamenti , possiamo calcolare la potenza media trasferita da F alla
massa m oscillante durante un periodo di oscillazione:
P = F(t)
dx
= F0 A cos( t)sin( t + )
dt
P = F0 A cos( t)sin( t)cos + cos2 ( t)sin )
Il primo termine è semplicemente una sinusoide a frequenza doppia, la cui media è zero,
mentre la media di cos2 è ancora :
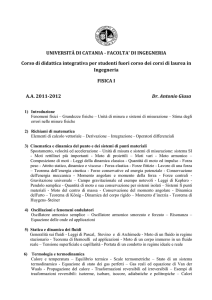
P =
F0 A sin 2
Dalla curva di ( ) si noti che in condizioni di risonanza è ( 0 ) = /2 , per cui
sin ( 0 ) = 1 e la potenza trasferita da F alla massa m oscillante è massima.
Si noti che in realtà questa conclusione si ottiene in maniera più corretta esaminando
direttamente il grafico di P(): il massimo della potenza trasferita coincide infatti con la
risonanza indipendentemente dallo smorzamento .