OSCILLATORE ARMONICO SEMPLICE
Un oscillatore è costituito da una particella che si muove
periodicamente attorno ad una posizione di equilibrio.
Compiono moti oscillatori: il pendolo, un peso attaccato ad una
molla in tensione, gli atomi in un solido, gli elettroni in
un’antenna, ecc.
DEFINIZIONI IMPORTANTI
Una particella si muove di moto armonico semplice quando il suo
spostamento è dato in funzione del tempo dalla relazione:
ξ = A cos (ϖ t + ϕ 0 )
dove il parametro A è definito ampiezza del moto armonico
semplice, la grandezza ϖ è chiamata frequenza angolare (o
pulsazione) della particella oscillante, mentre:
ϕ = ϖ t + ϕ0
è detta fase dell’oscillazione, con ϕ0 fase iniziale.
Osservazione importante La variabile ξ indica uno spostamento
generico rispetto all’origine del sistema di coordinate scelto. Nel
caso di uno spostamento rettilineo (moto di una massa attaccata ad
una molla) ξ = x ; nel caso di uno spostamento angolare (moto di
un pendolo) ξ = ϑ .
La variabile ξ riassume lo stesso valore dopo un tempo ∆t tale che:
∆ϕ = 2 π ⇒ ϖ ∆t = 2 π ⇒ ∆t =
2π
ϖ
Il moto armonico semplice è periodico, e la grandezza:
P=
2π
ϖ
è definita periodo dell’oscillazione.
Inoltre la frequenza (numero di oscillazioni complete nell’unità di
tempo) vale:
ν=
1 ϖ
=
P 2π
Nel caso di un oscillatore rettilineo la velocità e l’accelerazione
della particella valgono rispettivamente:
dx
v =
= −ϖ A sin (ϖ t + ϕ 0 )
dt
a =
(1)
dv
= −ϖ 2 A cos (ϖ t + ϕ 0 ) = −ϖ 2 x
dt
(2)
L’accelerazione è sempre proporzionale ed opposta allo
spostamento.
Similmente nel caso di un’oscillazione angolare si ha:
ω =
dϑ
= −ϖ A sin (ϖ t + ϕ 0 )
dt
α =
dω
= −ϖ 2 A cos (ϖ t + ϕ 0 ) = −ϖ 2 ϑ
dt
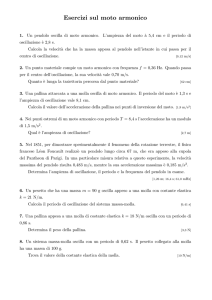
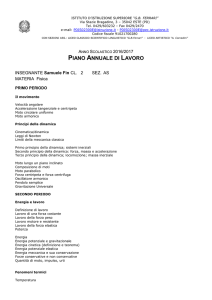
L’ OSCILLATORE RETTILINEO (MASSA ATTACCATA AD UNA
MOLLA)
Il moto oscillatorio ha ampiezza A = xm.
In (a) la molla è al massimo allungamento (massima distanza del
corpo dal punto di equilibrio); in (c) la molla è alla massima
compressione; in (b) e (d) il corpo passa per la posizione di
equilibrio (la molla assume la lunghezza a riposo).
In (a) e (c) il corpo è nei due punti di inversione del moto (v = 0);
in (b) e (d) il corpo ha la massima velocità.
Forza nel moto armonico semplice
Che tipo di forza deve agire su una particella di massa m perché
questa oscilli con moto armonico semplice lungo un dato asse x ?
In questo caso la legge del moto è del tipo:
x = A cos (ϖ t + ϕ 0 )
(3)
Per la seconda legge di Newton e per la (2):
F = m a = − mϖ 2 x
da cui si ottiene:
F = − k x (4)
avendo posto:
k = mϖ 2
⇔
ϖ=
k
m
Il parametro k viene chiamato costante elastica della molla.
Conclusione importante: nel moto armonico semplice la forza è
proporzionale allo spostamento e opposta ad esso; la forza è
sempre diretta verso l’origine (che è un punto di equilibrio).
Vale anche il viceversa: se la forza agente su un corpo è
proporzionale allo spostamento e opposta ad esso, allora il corpo
si muove di moto armonico semplice.
Infatti, essendo:
d 2x
F = ma = m 2 = −k x
dt
si ha:
d 2x
k
+
x = 0
2
dt
m
(Equazione differenziale del moto armonico semplice)
Per semplice sostituzione diretta, è facile provare che tale
equazione differenziale ha per soluzione la (3).
L’asserto è così provato.
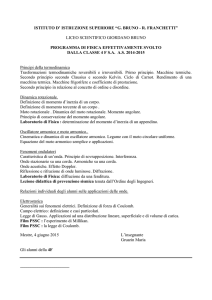
Energia cinetica nel moto armonico semplice
Per la definizione di energia cinetica e per la (1):
Ek =
1
1
m v 2 = mϖ 2 A2 sin 2 (ϖ t + ϕ 0 )
2
2
e, per la (3):
Ek =
[
]
(
1
1
mϖ 2 A2 1 − cos 2 (ϖ t + ϕ 0 ) = mϖ 2 A2 − x 2
2
2
)
L’energia cinetica è massima nel centro (x = 0) e nulla agli
estremi delle oscillazioni (x = ± A).
Energia potenziale nel moto armonico semplice
Per la definizione di energia potenziale e per la (4):
F = −
dE p
dx
= −k x
dE p = k x dx ⇒
Ep =
∫
Ep
0
x
dE p = ∫ k x dx
0
1
1
k x2 = m ϖ 2 x2
2
2
L’energia potenziale è nulla nel centro (x = 0) e massima agli
estremi delle oscillazioni (x = ± A).
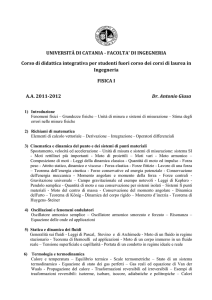
Energia totale nel moto armonico semplice
E = Ek + E p =
E =
(
)
1
1
1
mϖ 2 A2 − x 2 + m ϖ 2 x 2 = mϖ 2 A2
2
2
2
1
k A2 = cost.
2
K: Energia cinetica; U: Energia potenziale.
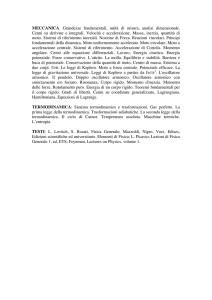
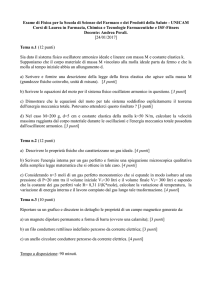
IL PENDOLO SEMPLICE
Pendolo semplice: particella di massa m sospesa ad un punto fisso
O mediante una fune di lunghezza l e di massa trascurabile.
Equazione del moto:
F = m g +T = ma
FT = − m g sin ϑ = m aT = m
dv
dω
= ml
dt
dt
d 2ϑ
m l 2 = − m g sin ϑ
dt
d 2ϑ
g
sin ϑ = 0
+
2
dt
l
⇔
ϑ << 1 ⇒ sin ϑ ≅ ϑ
Equazione differenziale del pendolo semplice nel limite delle
piccole oscillazioni:
d 2ϑ
g
+ ϑ = 0
dt 2
l
ossia:
d 2ϑ
2
+
ϖ
ϑ = 0
dt 2
(5)
con:
ϖ
2
g
=
l
Soluzione dell’equazione differenziale (5):
ϑ = ϑ0 cos (ϖ t + ϕ0 )
Periodo d’oscillazione del pendolo nel limite delle piccole
oscillazioni:
P=
2π
ϖ
= 2π
l
g
Il periodo d’oscillazione è indipendente dalla massa del pendolo e
dall’ampiezza delle oscillazioni.