Energia
Cos’è l’energia
• L’energia è una proprietà che associamo
agli oggetti o sistemi che fa sì che in un
sistema si possano produrre dei
cambiamenti:
temperatura,
colore,
posizione, di velocità, di forma …
2
Cos’è l’energia
• L’Energia non si vede e non si sente, non e’ una sostanza, ma e’ una
proprietà dei corpi o dei sistemi.
• L’energia e’ necessaria per far muovere gli oggetti, perchè accelerino,
perchè si scaldino, perchè si illuminino, ecc …
• Possiamo vedere gli effetti che produce quando ci sono dei
cambiamenti.
• L’Energia non è la causa dei cambiamenti (a differenza delle forze)
• Il solo fatto di “avere energia” non fa avvenire un cambiamento.
• L’energia e’ una funzione di stato. Lo stato di un sistema può essere
definito in termini delle sue variabili cinematiche/dinamiche,
magnetiche, termodinamiche etc. Avremo allora “energia meccanica”,
“energia elettrica”, etc…
• L’Energia può essere “immagazzinata”: nei carburanti o, ancora, alzando
un peso, comprimendo una molla, caricando un condensatore...
3
Modi di trasferire energia
• Lavoro (velocità, forze)
• Calore (temperatura, entropia)
4
Lavoro
• Supponiamo di avere un punto materiale P di
massa m, soggetto ad una forza F, e
supponiamo di spostarlo da un punto dello
spazio A ad un punto B
• Il lavoro svolto dalla forza F nello
spostamento di P da A a B è una grandezza
scalare definita come
A
F ds
B
ds
P
B
F
WAB
A
5
Lavoro
• Le dimensioni fisiche del lavoro sono
W F L ML2T 2
• E l’unità di misura è il Newton x metro
uW N m J
• che prende il nome di joule (J)
• Il lavoro è un mezzo per trasferire
energia dall’ambiente al sistema e
viceversa
6
Lavoro della forza peso
• Dato un punto materiale di massa m nel campo di
gravità, il lavoro della forza peso per spostare il punto
materiale da un punto A ad un punto B e`
W P ds
B
A
P 0, 0, mg ; ds dx, dy, dz ; P ds
B
B
A
A
W P ds mgdz mg z B z A mg z A z B
• Il lavoro non dipende dalla traiettoria seguita dal punto
per andare da A a B, ma solo dagli estremi A e B
7
Lavoro della forza peso
• Dimostrazione a partire dall’espressione generale
della forza di Newton
B
W Fg ds
A
m1m2
Fg G 2 rˆ; ds dr rˆ
r
m1m2
m1m2
Fg ds G 2 rˆ dr rˆ G 2 dr
r
r
B
B
dr
m1m2
1
W Fg ds G 2 dr Gm1m2 2 Gm1m2
r
r
r A
A
A
A
B
B
Gm1m2 Gm1m2
W
U B U A
rB
rA
8
Lavoro della forza peso
• Dimostrazione a partire
dall’espressione generale della
forza di Newton
W
Gm1m2 Gm1m2
U B U A
rB
rA
Gm1m2
Gm1m2
Gm1m2 RT
U B
rB
RT hB RT hB RT
2
RT hB Gm1 RT 2
R hB m2
2 T
2
RT hB RT RT hB
Gm1
RT 2
Gm1
1
Gm1m2
R
h
m
R
h
m
g
R
h
m
U
A
g RT hA m2
T
B
2
T
B
2
T
B
2
2
2
RT 2 RT hB
rA
hB
1
RT 2
R
T
W g RT hB m2 g RT hA m2 gRT m2 gRT m2 ghBm2 ghAm2 m2 g hA hB
9
Lavoro della forza elastica
• Dato un punto di massa m soggetto ad una
forza elastica, il lavoro nello spostamento da
un punto A ad un punto B e`
B
B
A
A
W Fe ds kr ds
ds dx, dy, dz ; r x, 0, 0 ; r ds xdx
B
1
1
2
2
W k xdx k xB x A k x 2
2
2
A
W Uel B Uel A
10
Lavoro della forza d’attrito
• Dato un punto di massa m soggetto ad una forza
d’attrito dinamica, il lavoro nello spostamento da un
B
B
punto A ad un punto B è
W Fd ds d N s ds
A
A
• La direzione della forza è opposta a quella dello
spostamento. Il lavoro è (supposta N costante)
B
B
A
A
W d N s ds d N ds d NL
• Il lavoro della forza d’attrito dipende da L , la lunghezza
del percorso fatto dal punto, ora il lavoro dipende dalla
traiettoria e non solo dai punti estremi A e B
11
Energia potenziale
• Quando si può esprimere il lavoro di una
forza come differenza tra un valore iniziale e
uno finale di una funzione, che è
indipendente dalla traiettoria possiamo porre
che:
W U B U A
• U è chiamata energia potenziale in un punto
dello spazio
12
Energia potenziale
• Nel caso della forza gravitazionale U mgh
1 2
• Nel caso della forza elastica U kx
2
• Lavoro della forza di attrito non può essere
espressa come differenza di energia
potenziale
13
Energia potenziale
• Poichè
W U B U A
• Potremo scrivere anche
W U B C C U A
• E quindi
W U B C U A C
• E ridefinire
U ' U C
W U 'B U ' A
14
Forze conservative
• Esiste cioè, a meno di una costante, una funzione U
delle coordinate degli stati iniziale e finale
• Se il lavoro dipende solo dalle coordinate dei punti
iniziale e finale, allora qualunque sia il percorso su
cui si calcola il lavoro, purche’ i punti estremi siano gli
stessi, il risultato sara` il medesimo
WAB F d s
C1
F ds
C2
• Inoltre se si cambia il verso di percorrenza, l’integrale
cambia segno perchè il prodotto scalare cambia
segno
WAB WB A F d s F d s
C1
C1
15
Forze conservative
• Se calcoliamo il lavoro lungo un percorso
chiuso C A B A
C A A
F ds
C1 A B
F ds
C2 B A
F ds
C1 AB
F ds
F ds 0
C1 AB
Se una forza soddisfa questa eguaglianza si
dice conservativa (es. Forza gravitazionale,
elastica, elettrica)
16
Forze dissipative
• Le forze di attrito non soddisfano questi
requisiti, abbiamo infatti visto che il
lavoro che producono e` sempre
negativo
• Queste forze si dicono dissipative
17
Potenza
• La potenza media è una grandezza
meccanica scalare definita come il
rapporto tra il lavoro compiuto W e
l’intervallo di tempo in cui si è avuto il
trasferimento di energia attraverso il
lavoro W
• E’ quella che usiamo tutti i giorni, che
dissipiamo quando facciamo esercizio
fisico e che spendiamo quando usiamo
dispositivi elettrici
dW
P
t
• Potenza istantanea
dt
dW t d
P t
F t s t
dt
dt
ds t
dF
s t F
dt
dt
0 F
ds t
dt
F v t
W
P
t
18
Dimensioni della potenza
• Le dimensioni fisiche della potenza sono
P W / T ML T
2
3
• Unità di misura è il Joule al secondo = Watt
uP J /s W
19
Energia del moto
• Consideriamo la potenza infinitesima
dp p 1 dp dW
P F v
p
dt m m dt
dt
• Relazione tra quantità di moto e lavoro: indipendente
dall’espressione della forza
dW
1
dp
p
dt
m dt
tB
tA
dW
dt
dt
tB
tA
1
dp
p
dt W
m dt
tB
tA
1
dp
p
dt
m dt
• Poiché p in generale varia con il tempo si ha:
2 p d p d p dt
d p
2
dt
p tB p t A
2
dt
2
tB
dt
tB
dp
2 p
dt
tA
dt
tA
tB
tA
dp
2 p
dt
dt
20
Energia del moto o cinetica
• Abbiamo infine
W
tB
tA
1 dp
1 p tB p t A
p dt
m dt
m
2
2
• La quantità
p
2
1 2
mv K
2m 2
• prende il nome di energia del moto o energia
cinetica
21
Teorema dell’energia cinetica
• La relazione appena trovata
W K
• È usualmente chiamata teorema dell’energia
cinetica: il lavoro fatto dalla forza sul punto
materiale è uguale alla variazione di energia
cinetica del corpo stesso (tecnicamente non è un
vero teorema)
22
Energia meccanica totale
• Si ha dunque:
W K
• Ma anche:
W U
• Confrontando le due equazioni troviamo:
K U A 0
23
Conservazione dell’energia
meccanica
• Introducendo la nuova grandezza
E K U
• che
chiamiamo
energia
meccanica,
l’equazione diventa E 0
• Cio` significa che l’energia meccanica (cioe`
la somma dell’energia cinetica e dell’energia
potenziale) di un punto materiale soggetto a
forze conservative si conserva
24
Lavoro nel caso generale
• Se sono attive sia forze conservative che non
conservative, il lavoro e` W Wc Wnc
• Applicando il teorema dell’energia cinetica (sempre
valido)
W KB K A
• Ed esprimendo il lavoro conservativo in termini di
energia potenziale Wc U B U A
• Otteniamo per il lavoro non conservativo
Wnc EB E A
• Cioè: se vi sono forze non conservative l’energia
meccanica non si conserva e la sua variazione e`
uguale al lavoro di tali forze
25
Urto
• È un’interazione tra due (o più) corpi che
avviene in un intervallo di tempo “piccolo”
• Abbastanza piccolo affinché l’azione di
eventuali forze esterne al sistema dei due
corpi sia trascurabile rispetto all’azione delle
forze interne
• Durante l’urto si sviluppano forze interne di
durata t molto breve ma che possono
assumere intensità molto elevate
• Queste sono dette forze impulsive
26
Definizioni
• Distinguiamo due stati: quello iniziale
prima dell’urto e quello finale dopo l’urto
• Ci interessa correlare i valori che le
grandezze assumono negli stati iniziale
e finale
• Non ci occuperemo invece di quel che
accade durante l’urto
27
Definizioni
• Diciamo m1 e m2 le masse dei due corpi
• Diciamo v1i , v2i le velocità dei due corpi nello
stato iniziale e v1f , v2f nello stato finale
Stato iniziale
m1
v1i
v2i
m2
Urto
v1f
tempo
Stato finale
28
v2f
Conservazione della QM
• In assenza di forze esterne, la QM del
sistema dei due corpi si deve
conservare
pi p f
m1v1i m2v 2i m1v1 f m2v 2 f
• Riarrangiando, troviamo la variazione di
QM di ciascun corpo
m1 v1f v1i m2 v2 f v 2i
p1 p2
29
Conservazione della QM
• La variazione di QM del primo corpo è
uguale e contraria a quella del secondo
• Nell’urto avviene quindi uno scambio di
QM tra i due corpi che costituiscono il
sistema, dovuto alle forze interne che
agiscono fra loro
• La QM del sistema si conserva, cioè la
QM dello stato iniziale è uguale alla QM
dello stato finale
30
Teorema dell’impulso
• Quanto ricavato sopra è espresso dal
teorema dell’impulso:
t
m1 v1 f v1i p1 F1(2) dt J1(2)
0
t
m2 v2 f v2i p2 F2(1) dt J 2(1)
0
31
Energia meccanica, cinetica
• Generalmente l’energia meccanica non si
conserva in un urto
• Tutto dipende dal fatto se le forze interne
sono conservative oppure no
• Lo stesso vale per l’energia cinetica, che in
generale non si conserva in un urto
32
Urti anelastici
• Un urto è più o meno anelastico a misura di
quanta energia cinetica K viene persa
• Un urto è elastico se K si conserva
• È totalmente anelastico se la perdita di K è
massima
• Nell’urto totalmente anelastico i due corpi
rimangono attaccati formando un unico corpo
33
Urto totalmente anelastico
• Stato iniziale pi m1v1i m2v2i
• Stato finale: i due corpi si attaccano insieme
p f m1 m2 v f
• Poiché agiscono solo forze interne, la QM si
conserva, ne segue
m1v1i m2v2i
pi p f v f
m1 m2
34
Urto totalmente anelastico
• Energia cinetica nello stato iniziale:
Ki
• e nello stato finale
Kf
pf
pi1
2
2m1
2
2 m1 m2
pi
pi 2
2
2m2
2
2 m1 m2
pi1 pi 2
2
2 m1 m2
• La perdita di energia cinetica è pari a
2
2
2
pi1 pi 2
pi1
pi 2
K f Ki
2 m1 m2 2m1 2m2
35
Urto totalmente anelastico 1d
pi1 pi 2 pi12 pi 2 2
Ki
2 m1 m2 2m1 2m2
2
Kf
m1 m2
K f Ki
pi1 pi 2
4m
2
1
2
2
pi1 pi 2
2m
4m K f Ki 2 pi1 pi 2 p pi 2 pi1 pi 2 0
2
i1
2
2
36
Urto elastico in 1-D
• Consideriamo il semplice caso di urto in 1-D,
cioè tale per cui le velocità, iniziali e finali,
sono tutte lungo una sola direzione (urto
centrale)
• Applichiamo la conservazione della QM
m1v1i m2v 2i m1v1 f m2v 2 f
• e la conservazione dell’energia cinetica
1
1
1
1
2
2
2
m1v1i m2v 2i m1v1 f m2v 22 f
2
2
2
2
37
Urto elastico in 1-D
• Le due eqq. costituiscono un sistema in due
incognite, che è possibile risolvere con i
metodi noti; otteniamo
m1 m2
2m2
v1 f
v1i
v 2i
m1 m2
m1 m2
v2 f
2m1
m1 m2
v1i
v 2i
m1 m2
m1 m2
38
APPLICAZIONI
39
Approfondimento moto
armonico
• Dimostrare che l’energia totale di un
oscillatore armonico è costante
40
Approfondimento moto
armonico
d
• In termini di quantità di moto:
pF
dt
• Legge di forza
F k q
p kq
41
Approfondimento
• Per definizione: p mq p mq
• L’equazione del moto diviene mq kq
• Dividendo i membri per m e ponendo 2 k
m
• Otteniamo
q q
2
42
Approfondimento
q 2 q q q0 sin t
2
q q0 cos t
p
q
m
p mq mq0 cos t
q0 sin t q0 cos t q0 2
p
q0 cos t
m
2
2
2
2
2
q p
1
q0 q0 m
1
1 2 1
2 2
2 2
mq
p mq0
2
2m
2
= costante
43
2
2
q p
2
2
1
x
y
1
q0 q0 m
q
p
p
x ;y
q0
q0 m p0
Conservazione energia
orbita spazio delle fasi
chiusa
44
Energia potenziale
gravitazionale
Gm1m2 Gm1m2
W
rB
rA
U B U A
Gm1m2
U r
r
m1m2
Fg G 2 rˆ U
r
1
1
,
,
r r r sin
45
Velocità di fuga
Attenzione:
manca il
termine di
energia cinetica
che vedremo
più avanti
perché la Terra
è una sfera
estesa!
Etot K U RT
GmM T 1
1
mvi 2
mv 2 0
2
RT
2
m3
24
2*6.67 10
*6
10
kg
2
kg s
6.3 106 m
11
v 2 0
Gm1M T
2GM T
1
mvi 2
0 vi
2
RT
RT
vi v fuga 1.1*104 ms 1
46
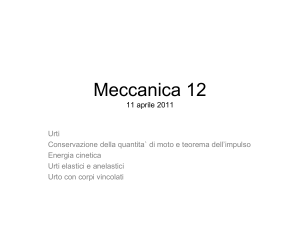
Giro della morte risolto
v2
maN m N ' mg
r
v2
N ' m mg ; N ' 0
r
v 2 rg
1
Ei mv0 2 0
2
1
E f mv 2 mg 2r
2
1
1
mv0 2 mv 2 mg 2r
2
2
v 2 v0 2 4mgr rg
V
2r
V0
v0 5rg
47