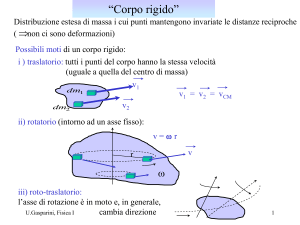
Dinamica dei sistemi
SISTEMI DI PUNTI
2
Centro di Massa (CM)
• Dati n corpi approssimabili come punti materiali, il CM
è identificato dal seguente vettore :
mi ri
rCM i
mi
i
m x
m
i i
xCM
i
i
i
m y
m
i
yCM
i
i
i
m z
m
i i
i
zCM
i
i
i
3
Velocità del CM
• Velocità del CM è la derivata del vettore
che ne individua la posizione
vCM
dri
mi
drCM
dt
i
dt
mi
i
mi vi
P
i
mi M
i
• La QM di un sistema è uguale alla QM
del CM, considerato come un punto
materiale di massa M e velocita` vCM
P MvCM
4
Forze interne ed esterne
• Per ogni punto i del sistema diciamo Fi la
forza totale agente sul punto
• Questa è la somma di due termini, uno
dovuto alle forze interne al sistema e uno
dovuto a quelle esterne
I E
Fi Fi Fi
• Sia le forze interne che esterne possono
essere conservative o dissipative
5
Risultante delle forze interne
• La risultante di tutte le forze interne di un sistema e` nulla
I
Fi 0
i
• Infatti, ad una forza agente sul punto i e dovuta al punto j
I
f ij
• corrisponde la forza uguale e opposta
I
f ji
• La risultante della coppia è zero e quindi la somma delle
risultanti è 0
6
Accelerazione del CM
aCM
dvi
mi
dvCM
dt
i
dt
mi
mi ai
i
M
i
• 2a legge della dinamica per il punto i
I E
mi ai Fi Fi Fi
• e quindi
I E
I E E
MaCM mi ai Fi Fi F F F
i
i
7
Prima equazione della
dinamica dei sistemi
MaCM
dP
dvi
dpi d
mi ai mi
pi
dt
dt dt i
dt
i
i
i
MaCM
dP E
F
dt
• Il CM si muove come un punto materiale in
cui sia concentrata tutta la massa del sistema
e a cui sia applicata la risultante delle forze
esterne
8
Conservazione della QM
• Se il sistema e` isolato, o le forze esterne
hanno risultante nulla (urti)
E
F 0
dP
0
dt
P const.
• CM si muove di moto rettilineo
uniforme
P
vCM
M
• Attenzione: la QM dei singoli punti può
cambiare nel tempo, è la loro somma che
rimane costante
9
CM di due corpi puntiformi
M
• Siano M e m le masse
r2
m
• Prendiamo come origine la posizione di uno dei due
corpi (l’1 p.e.) allora rM=0
rCM
MrM mrm
m
rm
M m
M m
• Quindi il CM giace sulla congiungente dei due punti e
la sua distanza da essi è inversamente proporzionale
alle loro masse
10
CM di due corpi puntiformi
• Introduciamo
r r2 r1
• Allora, i vettori posizione dei due corpi
rispetto al CM si possono scrivere
r1
r2
m
r
M m
1
r1
CM
M
r
M m
r2
2
11
GRANDEZZE MECCANICHE
DEI SISTEMI
12
Vettori momento
• Il momento di una grandezza vettoriale w
è definito come il prodotto vettoriale
m r w
• Il punto rispetto al quale si pone l’origine
del vettore r è detto polo
• Tale
punto
non
necessariamente
dev’essere fermo
13
Momento angolare
• È il momento del vettore quantita` di moto
del punto materiale:
LO r p
LO
P
p
O
OP
L L p L2T 1M
• Dimensioni fisiche:
2
• Unità di misura:
kg m / s N m s
14
Momento di forza
• È il momento del vettore forza agente sul punto
materiale:
O r F
O
J
F
• Dimensioni fisiche:
• Unita` di misura:
P
b
O
“braccio”
LF L2T 2 M
kg m2 / s 2 N m
15
Momento risultante
• Se la forza complessiva R è la risultante di piu`
forze applicate tutte allo stesso punto
materiale:
i
i
i
r Fi r Fi r R
i
• il momento risultante (cioe` la somma dei
momenti di tutte le forze) è uguale al momento
della risultante (cioe` al momento della somma
di tutte le forze)
16
Teorema del momento angolare (o seconda
equazione della dinamica dei sistemi)
• Dato che esiste una relazione tra quantità di moto di un
punto materiale e forza risultante ad essi applicata,
esisterà necessariamente una relazione anche tra i loro
momenti
dLQ
d dr dp
r p p r
dt
dt
dt
dt
dLQ
p
p r F 0 Q
dt
m
Prodotto di vettori //
dLQ
dt
Q
17
Conservazione del Momento
Angolare
• Se il momento di forza e` nullo (rispetto al
polo scelto) allora il momento angolare si
conserva (rispetto allo stesso polo) e
viceversa
Q 0
dLQ
dt
0
LQ const .
18
Pendolo semplice con Ly
LO OP mv
o OP mg
z
O
OP l sin , l cos ,0 Dimostrazione
v vx , v y , 0
lunga! Si può
fare anche più
brevemente!
OPv 0 sin vx cos vy 0 vy vx tan
v vx 1, tan , 0
v vx
2
1
tan
vx
v l vx l
x
P
mg
sin 2
1
vx
cos
vt
piano di
oscillazione
v vx , v y , 0 l , 0,190
Pendolo semplice con Ly
z
LO OP mv
OP l sin , l cos , 0
LO l sin
ml
ˆj
l cos
0
x
P
v vx , v y , 0 l , 0, 0
iˆ
O
kˆ
mg
vt
piano di
oscillazione
0 l cos ml kˆ ml 2 kˆ
0
20
Pendolo semplice con Ly
z
O OP mg
O
OP l sin , l cos , 0
P
g 0, g , 0
mg
iˆ
O l sin
0
x
ˆj
l cos
mg
vt
piano di
oscillazione
kˆ
0 mgl sin kˆ mgl kˆ
0
21
Pendolo semplice con L
y
z
dLQ
O
d
2
2 ˆ
ˆ
ml k ml k
dt
dt
ˆ
Q mgl k
x
P
mg
vt
g
g
ml lmg sin sin
l
l
piano di
oscillazione
2
22
Leggi di Keplero con L
M S MT
d LO
O r Fg (r ) r G
2
dt
r
TS
r 0
• Il moto avviene sempre sullo stesso piano
LO
O
piano del moto
r
P
direzione costante
p=mv
23
Leggi di Keplero con L
dA(t)
O
ds
r ( t+dt )
r(t)
ds sinj
1
dA(t ) r (t )ds sin j (t )
2
j
dA(t ) 1
ds
1
r (t ) sin j (t ) r (t )v(t ) sin j (t )
dt
2
dt
2
LO r (t )mv(t ) sin j (t )
dA(t ) LO
k
dt
2m
24
APPROFONDIMENTI
25
Centro di massa in un corpo
continuo
• Riprendiamo la definizione di CM
rCM
m
r
ii
i
m
i
i
• Per un corpo con distribuzione continua
di materia
rCM
r dm
1
dm M
corpo
r dm
corpo
corpo
26
Centro di massa in un corpo
continuo
• Ove abbiamo indicato con M la massa totale
del corpo M dm
corpo
• Le masse infinitesime sono contenute in
volumi infinitesimi dm dV
• Se la densità è uniforme, gli integrali si
riducono a integrali puramente geometrici
rCM
r
dm
corpo
dm
corpo
r
dV
corpo
dV
corpo
r
dV
corpo
dV
corpo
r
dV
corpo
dV
1
r dV
V corpo
corpo
27
TEOREMI DEI SISTEMI A PIÙ
PARTICELLE
28
Momento angolare sistemi a più
particelle
• Abbiamo visto nel caso di un solo punto
materiale, che, se il polo è fisso e il sistema di
riferimento e` inerziale, il teorema del
momento angolare e`
dLO
O
dt
29
Teorema del momento angolare
• Generalizziamo questo teorema al caso di un
sistema di piu` particelle e polo fisso
• Deriviamo rispetto al tempo l’espressione:
LO ri pi
i
• Otteniamo
dp
dLO d
dr
ri pi i mi vi ri i
dt
dt i
dt
i dt
i
vi mi vi ri Fi 0 O
i
• Cioè vale ancora
i
dLO
O
dt
30
Cambiamento di polo
• Cambiando polo il momento angolare
diviene
'
LQ r p r rQ p r p rQ p LO rQ p
• Il valore del momento dipende dunque
dal polo scelto
p
r
O
r’
Q
rQ
31
Teorema del momento angolare
• Generalizziamo ora al caso di un sistema di piu`
particelle e di un polo mobile
• Deriviamo rispetto al tempo l’equazione che lega il
MA calcolato rispetto ad un polo fisso O e un polo
mobile Q
• Otteniamo
dLQ
LQ LO rQ P
dLO d drQ dP
rQ P O
P rQ
dt
dt dt
dt
dt
O vQ P rQ F O rQ F vQ P
32
Teorema del momento angolare
• Ricordando che l’espressione tra parentesi è
il momento rispetto al polo mobile Q,
otteniamo
dLQ
Q vQ P
dt
• Espressione che differisce per la presenza
del secondo termine da quella trovata per il
polo fisso
• Ovviamente si ritrova quella equazione se
anche Q è fisso: in tal caso il secondo
33
termine è nullo
Teorema del momento angolare
• Esistono però altri casi in cui le equazioni per
il polo mobile e per il polo fisso sono uguali
• Il caso più importante è quello in cui il polo
coincide con il CM del sistema, in tal caso
dLCM
CM vCM P
dt
• E poiché vCM e P sono proporzionali, segue
dLCM
CM
dt
34
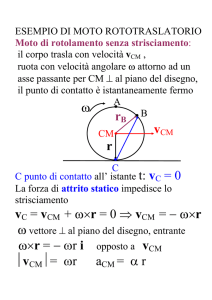
Teorema del momento angolare
• Quando il polo coincide con il punto di contatto C
tra una ruota che si muove (slittando o rotolando)
e una superficie di appoggio
dLC
C vC P
P
dt
• Poiché vC e P sono paralleli, segue
dLC
C
dt
C
vC
35
Teorema del momento angolare
• Abbiamo generalizzato il teorema del momento
angolare: la derivata del momento angolare è
uguale al momento delle forze (esterne) se
come polo usiamo
– un punto fisso in un sistema inerziale
– oppure il CM del sistema (indipendentemente
dal fatto che questo sia fisso o sia mobile e
qualunque sia il suo moto)
dLCM
CM
dt
36
Approfondimento
TEOREMI DI KOENIG E
SULL’ENERGIA DEI SISTEMI DI
PARTICELLE
37
Caratteristiche del sistema di riferimento del
CM
• Ha origine nel CM
• Gli assi sono sempre paralleli agli assi di un
sistema inerziale
• In generale non e` inerziale
• La posizione di un punto è:
pi
*
ri ri rCM
• Derivando questa relazione
troviamo la velocita`
*
vi vi vCM
CM
r
i
*
Ai
ri
O
rCM
38
Sistema di riferimento del CM
• La posizione e la velocita` del CM nel SCM sono,
ovviamente,
*
*
rCM rCM rCM 0 vCM vCM vCM 0
• Ricordando la definizione di CM, valida in ogni
SdR, abbiamo anche
*
*
m
r
M
r
ii
CM 0
*
*
m
v
M
v
ii
CM 0
i
• Lai seconda equazione stabilisce
che la QM totale
del sistema e` nulla se misurata nel SCM
*
*
P MvCM 0
39
Teoremi di Koenig
• 1o teorema: fornisce una relazione tra il
valore del momento angolare in un sistema
inerziale e nel sistema del CM
• 2o teorema: fornisce una relazione tra il
valore dell’energia cinetica in un sistema
inerziale e nel sistema del CM
40
1o teorema di Koenig
• Confrontiamo L calcolato
– nel SCM con polo nel CM
– nel SdR inerziale con polo nell’origine O
pi
CM
r
i
*
Ai
ri
O
*
*
*
LCM ri mi vi ri rCM mi vi vCM
i
rCM
i
ri mi vi rCM mi vi ri mi vCM rCM mi vCM
i
i
i
i
LO rCM mi vi mi ri vCM rCM MvCM
i
i
41
1o teorema di Koenig
• Il 2o e 4o termine sono uguali e opposti; il 3o
termine e` il MA del CM nel SdR inerziale
*
LCM LO MrCM vCM LO rCM MvCM LO LO CM
• La relazione puo` essere letta anche
*
LO LO CM LCM
• L di un corpo in un SdR inerziale è uguale a
Ldel sistema rispetto al CM, calcolato nel SCM
più L del CM nel sistema inerziale
42
2o teorema di Koenig
• Calcoliamo ora l’energia cinetica
2
1 *2
1
*
K mi vi mi vi vCM
i 2
i 2
1 2
1 2
mi vi mi vi vCM mi vCM
i 2
i
i 2
1
2
K mi vi vCM mi vCM
2 i
i
1 2
1 2
K MvCM vCM MvCM K MvCM
2
2
43
2o teorema di Koenig
• il 2o termine è l’energia cinetica del CM nel
SdR inerziale
K K K CM
*
• La relazione può essere letta anche
K K CM K *
• L’energia cinetica di un corpo in un SdR
inerziale e` uguale all’ EC del sistema calcolata
nel SCM, piu` l’EC del CM nel sistema inerziale
44
Teoremi sull’energia
Teorema di conservazione dell’energia meccanica E
per un corpo esteso
K U E 0
Forze
conservative
K U E Wnc
Forze non
conservative
45