Capitolo 2: Semplificazione,
Ottimizzazione e Implicazione
1
Semplificazione,
Ottimizzazione e Implicazione
Semplificazione di vincoli
Proiezione
Semplificatori di vincoli
Ottimizzazione
Implicazione ed equivalenza
2
Semplificazione di vincoli
Due vincoli equivalenti rappresentano la
stessa informazione, ma …
Uno puo’ essere piu’ semplice dell’altro
X 1 X 3 2 Y X
X 3 2 Y X
3 X X 2Y
X 2Y 3 X
X 2Y 3 2Y
X 2 Y Y 1
Rimuovere vincoli
ridondanti, riscrivere un
vincolo primitivo, cambiare
l’ordine, sostituire usando
una equazione, tutti
preservano l’equivalenza
3
Vincoli ridondanti
Un vincolo C1 implica un altro vincolo C2
se le soluzioni di C1 sono un sottoinsieme
di quelle di C2
C2 e’ detto ridondante rispetto a C1
Scriviamo: C1 C2
X 3 X 1
Y X 2 Y 4 X 1
cons ( X , X ) cons ( Z , nil ) Z nil
4
Vincoli ridondanti
Possiamo rimuovere un vincolo primitivo
che e’ ridondante rispetto al resto dei vincoli
X 1 X 3 X 3
Y X 2 X 1 Y 4 Y X 2 Y 4
cons( X , X ) cons( Z , nil ) Z nil cons( X , X ) cons( Z , nil )
Cosi’ otteniamo un vincolo piu’ semplice
5
Risolutori a forma risolta
Un risolutore a forma risolta crea vincoli
equivalenti puo’ essere visto come un
semplificatore
Per esempio usando il risolutore per equazioni di termini
cons( X , X ) cons( Z , nil ) Y succ( X ) succ( Z ) Y Z nil
X nil Z nil Y succ(nil )
O usando il risolutore di Gauss-Jordan
X 2 Y 2Y X T Z X Y 4 Z T 5
X 3 Y 1 Z 5 T
6
Proiezione
Diventa anche piu’ importante semplificare quando
siamo solo interessati ad alcune variabili nel vincolo
V 1 I 1 R1
+
V 2 I 2 R2
V
V V1 0
I I1 I 2 0
I I1 I 2 0
R1 5
R 2 10
V2
V1
V V 2 0
V1V 2 0
+
I1
I
-3_
--
I2
---
10
I
Semplificato rispetto a V e I: V
3 7
Proiezione
La proiezione di un vincolo C sulle
variabili V e’ un vincolo C1 tale che
C1
ha solo le variabili in V
Ogni soluzione di C e’ una soluzione di C1
Una soluzione di C1 puo’ essere estesa per
ottenere una soluzione di C
X Y Y Z Z 0
X 0
{ X 0, Y 0, Z 0}
{ X 0}
{ X 4, Y 3, Z 1}
{ X 4}
8
Algoritmo di Fourier
Elimina una variabile y da disequazioni
lineari C
Scrive ogni diseq con y su un lato:
t1 y
y t2
Per ogni coppia t1 y
y t2
produce
una nuova diseq
t1 y y t2 t1 t2
Il risultato e’ un insieme di nuove diseq e
quelle diseq in C che non riguardano y
9
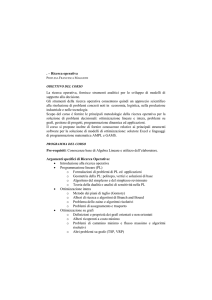
Esempio
Y
Proiettiamo fuori Y:
+1
X 1 Y
-1
1 X Y
+1
X
+1
X
Y 1 X
Y 1 X
-1
X 1 Y Y 1 X
X 1
X 1 Y Y 1 X
02
1 X Y Y 1 X
02
1 X Y Y 1 X
1 X
-1
Il risultato contiene solo X:
X 1 1 X
10
Proiettare i vincoli sugli alberi
Possiamo proiettare vincoli sui termini
cons(Y , Y ) cons( X , Z ) succ( Z ) succ(T )
Proiettato su {X,Z} e’ X Z
Ma cosa e’ X = cons(Y,Z) proiettato su X?
Risposta: non c’e un tale vincolo!
11
Semplificatori di vincoli
vincoli C1 and C2 sono equivalenti
rispetto alle variabili in V se
Prendendo
una soluzione di uno dei due, e
restringendola alle variabili in V, questa
soluzione ristretta puo’ essere estesa ad una
soluzione dell’altro
Example X=succ(Y) and X=succ(Z) wrt {X}
X succ(Y )
{X }
X succ( Z )
{ X succ(a ), Y a}
{ X succ(a )}
{ X succ(a ), Z a}
{ X succ(nil ), Y nil} { X succ(nil )} { X succ(nil ), Z nil}
12
Definizione di semplificatore
Un semplificatore di vincoli e’ una
funzione simpl che prende un vincolo C e
un insieme di variabili V e ritorna un
vincolo C1 che e’ equivalente a C rispetto a
V
Possiamo creare un semplificatore per
disequazioni lineari usando l’algoritmo di
Fourier
13
Semplificatore per vincoli
sugli alberi
Applicare il risolutore per equazioni di termini a
C e ottenere C1
se C1 e’ false allora return false
Per ogni equazione x=t in C1
se x e’ in V allora
se t e’ una variabile non in V
sostituire x per t in C1 e nel risultato
altrimenti
aggiungere x=t al risultato
return risultato
14
Esempio di semplificazione
sugli alberi
Vincolo sugli alberi da semplificare rispetto a {Y,T}:
h( f ( X , Y ), Z , g (T )) h( f ( g (T ), X ), f ( X , X ), g (U ))
Vincolo equivalente dal risolutore sugli alberi:
Z f ( g (U ), g (U )) X g (U ) Y g (U ) T U
Eliminare le prime due equazioni, tenere la
terza e usare l’ultima per sostituire T con U:
Y g (T )
15
Proprieta’ dei semplificatori
Proprieta’ desiderabili di un semplificatore:
proiettante: vars( simpl (C,V )) V
Debolmente proiettante: per tutti I vincoli C2 che
sono equivalenti a C1 rispetto a V
| vars( simpl (C1,V )) V | | vars(C2) V |
Un risolutore debolmente proiettante non usa mai piu’ variabili
di quelle necessarie
Entrambe le proprieta’ permettono ad un semplificatore
di essere usato come un risolutore
16
Ottimizzazione
Spesso dato un problema modellato con vincoli,
non vogliamo una qualsiasi soluzione, ma una
soluzione ottima
Quindi si ha un problema di ottimizzazione
Abbiamo bisogno di una funzione obbiettivo in
modo da poter paragonare soluzioni, cioe’ un
mapping da soluzioni a valori reali
17
Problema di ottimizzazione
Un probleema di ottimizzazione (C,f)
consiste di un vincolo C e una funzione
obbiettivo f
Una valutazione v1 e’ preferita alla
valutazione v2 se f(v1) < f(v2)
Una soluzione ottima e’ una soluzione di C
tale che non esiste nessun’altra soluzione di
C che e’ preferita a lei.
18
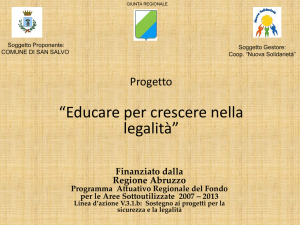
Esempio di ottimizzazione
Y
Un problema di ottimizzazione: 4
(C X Y 4,
f X 2 Y2)
Trovare il punto piu’ vicino
all’origine che soddisfi C.
Alune soluzioni e il valore
di f :
3
X+Y=4
2
1
X
0
1
2
3
{ X 0, Y 4}
16
{ X 3, Y 3}
18
Soluzione ottima:
{ X 2, Y 2}
8
{ X 2, Y 2}
4
19
Ottimizzazione
Alcuni problemi di ottimizzazione non
hanno soluzioni
Il
vincolo non ha soluzioni:
( X 2 X 0, X )
2
Il
problema non ha ottimo:
( X 0, X )
Per ogni soluzione, c’e’ n’e’ sempre un’altra
migliore
20
Algoritmo del simplesso
L’algoritmo piu’ usato per l’ottimizzazione
Ottimizza un funzione lineare rispetto a dei
vincoli lineari
Collegato all’eliminazione di Gauss-Jordan
21
Algoritmo del simplesso
Un problema di ottimizzazione (C, f) e’ in
forma simplesso se:
e’ la congiunzione di CE e CI
CE e’ una congiunzione di equazioni lineari
CI vincola tutte le variabili in C ad essere non
negative
f e’ una espressione lineare sulle variabili in C
C
22
Esempio del simplesso
Un problema di ottimizzazione in forma simplesso
minimize 3 X+2Y-Z+1 subject to
X
Y
X
3Y
3
2Z
T
1
X 0Y 0 Z 0T 0
• Un problema arbitrario puo’ essere messo in forma
simplesso:
• rimpiazzando ogni
variabile
non vincolata X con
nuove variabili X X
•Rimpiazzando ogni disequazione e r con una
nuova variabile s e e s r
23
Simplex Solved Form
A simplex optimization problem is in basic
feasible solved (bfs) form if:
The
equations are in solved form
Each constant on the right hand side is nonnegative
Only parameters occur in the objective
A basic feasible solution is obtained by
setting each parameter to 0 and each nonparameter to the constant in its equation
24
Simplex Example
An equivalent problem to that before in bfs form
minimize 10 Y Z subject to
X 3
T
Y
4 2Y
2Z
X 0Y 0 Z 0T 0
We can read off a solution and its objective value
{ X 3, T 4, Y 0, Z 0}
f 10
25
Simplex Algorithm
starting from a problem in bfs form
repeat
Choose a variable y with negative coefficient in the obj. func.
Find the equation x = b + cy + ... where c<0 and -b/c is minimal
Rewrite this equation with y the subject y = -b/c + 1/c x + ...
Substitute -b/c + 1/c x + ... for y in all other eqns and obj. func.
until no such variable y exists or no such equation exists
if no such y exists optimum is found
else there is no optimum solution
26
Simplex Example
minimize 10 Y Z subject to
X 3
T
Y
4 2Y
2Z
X 0Y 0 Z 0T 0
Choose variable Y, the first
eqn is only one with neg.
coeff Y 3 X
minimize 7 X Z subject to
Y
3
X
T 10 2 X
2Z
Choose variable Z, the 2nd
eqn is only one with neg.
.T
coeff Z 5 X 05
minimize 2 2 X 0.5T subject to
Y
3 X
Z 5 X
0.5T
X 0Y 0 Z 0T 0
No variable can be chosen,
optimal value 2 is found
X 0Y 0 Z 0T 0
27
Another example
Y
minimize X Y subject to
Y 0
4
X 1
3
-2
X 3
-1
0
preferred
solutions
1
2
2Y X 3
2
1
X
An equivalent simplex form is:
S2
X
S3
X
X
1
2Y
S1
0
1
2
3
4
3
3
X 0 Y 0 S1 0 S 2 0 S3 0
An optimization problem
showing contours of the
28
objective function
Another example
Y
Basic feasible solution form: circle
minimize 0 0.5S1 0.5S3 subject to
Y 3 0.5S1 0.5S3
S2 2
S3
X 3
S3
4
-2
-1
0
3
1
2
2
1
Choose S3, replace using 2nd eq
minimize 1 0.5S1 0.5S 2 subject to
Y
2 0.5S1
0.5S 2
S3 2
S2
X 1
S2
X
0
1
2
3
4
Optimal solution: box
29
The Missing Part
How do we get the initial basic feasible
solution?
Solve a different simplex problem
Add
artificial variables to make equations in
basic feasible solved form
Minimize the sum of the artificial variables
If the sum is zero we can construct a bfs for the
original problem
30
The Missing Part Example
Original simplex form equations
S2
X
S3
X
X
1
2Y
3
S1
3
With artificial vars in bfs form:
A1 1 X
S2
A2 3 X
A3 3 X
S3
2Y
S1
Objective function: minimize
A1 A2 A3
7 X 2Y S1 S2 S3
31
Missing Part Example II
Problem after minimization of objective function
minimize A1 A2 A3 subject to
Y
3 0.5S1
0.5S3
S2
2
S3
X
3
S3
0.5 A2
A1
A2
0.5 A3
A2
Removing the artificial variables, the original problem
Y
3 0.5S1
0.5S3
S2 2
S3
X
S3
3
32
Implicazione ed Equivalenza
Altre importanti operazioni sui vincoli:
implicazione: controlla se C1 implica C2
impl(C1,
C2) risponde true, false o unknown
equivalenza: controlla se C1 e C2 sono
equivalenti
equiv(C1,
C2) risponde true, false o unknown
33
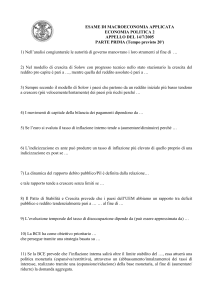
Esempio di implicazione
Building a House
Stage S
Per I vincoli della casa CH, lo
stadio B sara’ raggiunto dopo lo
stadio C?
CH TB TC
Per questa domanda la risposta e’
false, ma se richiediamo che la
casa sia finita in 15 giorni la
risposta e’ true
CH TE 15 TB TC
Foundations
7 days
Stage A
Interior Walls
4 days
Stage B
Doors
2 days
Chimney
3 days
Exterior Walls
3 days
Stage C
Roof
2 days
Windows
3 days
Stage D
Tiles
3 days
Stage E
34
Implicazione ed Equivalenza
Possiamo usare impl per definire equiv e
viceversa:
impl (C1, C2) equiv(C1, C1 C2)
equiv(C1, C2) impl (C1, C2) impl (C2, C1)
Possiamo usare un risolutore per testare
impl:
impl (C1, C2) solv(C1 C2)
Es.: impl (CH , TB TC ) solv(CH TB TC )
35
Sommario su semplificazione,
ottimizzazione e implicazione
Vincoli equivalenti possono essere scritti in varie
forme, quindi serve la semplificazione
Soprattutto se siamo solo interessati
all’interazione tra alcune delle variabili
Molti problemi necessitano di soluzioni ottime, ci
sono algoritmi (es.: simplesso) per trovarle
Posssiamo anche voler fare domande che
riguardano l’implicazione
36