UNIVERSITA’ DEGLI STUDI DI CATANIA
SCUOLA INTERUNIVERSITARIA SICILIANA PER LA
SPECIALIZZAZIONE ALL’INSEGNAMENTO NELLE SCUOLE
SECONDARIE
MESSINA CLAUDIA GRAZIA
URTI IN UNA E DUE DIMENSIONI:
LA SCOPERTA DEL NEUTRONE.
TESINA
Corso di Fondamenti
di Fisica I
Prof. V. Bellini
ANNO ACCADEMICO 2004 – 2005
Indice
Introduzione…………………………………………………………………….3
Parte generale.
1. Esperimenti di interazione tra due corpi.
1.1 Esperimento di esplosione……………………………………………….4
1.2 Esperimento di implosione……………………………………………….5
1.3 Interazione tra due sferette metalliche………………………………….6
2. Quantità di moto e sistemi isolati.
2.1 Quantità di moto…………………………………………………………...7
2.2 Sistema isolato…………………………………………………………….8
2.3 Conservazione della quantità di moto…………………………………..9
1
3. Urti.
3.1 Conservazione della quantità di moto negli urti………………………10
3.2 Classificazione degli urti………………………………………………...10
3.3 Urti elastici in una dimensione…………………………………………13
3.4 Urti obliqui………………………………………………………………...18
3.4.1 Urto elastico obliquo di due sferette di cui una ferma………18
3.4.2 Urto obliquo anelastico e totalmente anelastico…………….23
Parte applicativa.
La scoperta del neutrone……………………………………………………26
2
Introduzione.
Scopo di questa tesina è spiegare la teoria degli urti in una e due
dimensioni, facendo vedere come con l’applicazione dei principi di
conservazione sia stato possibile arrivare alla scoperta del neutrone.
L'approccio è di tipo didattico, il tema trattato è alla portata di un uditorio
di studenti del terzo anno di un liceo scientifico.
I prerequisiti necessari per una giusta comprensione della parte generale
e di quella applicativa sono:
leggi della dinamica;
dinamica del punto materiale;
energia cinetica e teorema delle forze vive;
impulso di una forza;
conservazione dell’energia.
3
Parte generale.
1.
Esperimenti di interazioni fra due corpi.
Quando due o più corpi si scambiano delle forze si dice che essi
interagiscono o che c’è una interazione. Si passa così dallo studio della
dinamica del punto materiale a quella di un sistema di particelle.
Esaminiamo ora alcune interazioni tra due corpi.
1.1 Esperimento di esplosione.
Immaginiamo di avere due carrelli A e B su un tavolo ben levigato, legati
con un filo in modo che la molla interposta sia mantenuta compressa.
Supponiamo che i due carrelli abbiano uguale massa m.
Se si brucia il filo, i carrelli acquistano velocità v A e v B opposte.
Per poter misurare le velocità, si dispongono sul tavolo due arresti in
modo che i due carrelli li tocchino contemporaneamente.
4
Se chiamiamo x A e x B , rispettivamente gli spazi percorsi dai carrelli A e
B, dall’istante in cui brucia il filo a quello in cui essi urtano contro gli
arresti, detto t il tempo trascorso, sarà ovviamente:
v A
xA
t
e
v B
xB
.
t
Se si ripete l’esperimento usando stavolta un sistema C formato da due
carrelli aventi la stessa massa e un altro carrello D, si trova
sperimentalmente che il sistema C acquista dopo l’esplosione una
velocità v C pari alla metà della velocità v D assunta dal carrello D.
Le velocità continuano ad avere versi opposti.
1.2 Esperimento di implosione.
Può essere considerato come l’esperimento opposto al precedente.
Ai due carrelli A e B sempre di massa uguale, lanciati con velocità
opposte, viene attaccata della plastilina in modo che essi restino uniti
dopo l’urto.
Si trova che dopo l’urto entrambi i carrelli si arrestano.
Se si ripete l’esperimento usando un sistema C, formato da due carrelli
aventi la stessa massa, e un altro carrello D, si trova che dopo l’urto la
velocità del sistema C + D è uguale ad un terzo della velocità comune ai
5
due carrelli prima dell’urto, ed è diretta come la velocità del sistema di
massa maggiore prima dell’urto.
1.3 Interazione tra due sferette metalliche.
Poniamo due sferette metalliche A e B, di massa uguale, su un binario in
modo che la direzione del moto sia sempre la stessa sia prima che dopo
l’urto.
La sferetta A che urta con velocità v A la sferetta B, supposta ferma, si
arresta dopo l’urto, mentre B acquista la velocità che aveva A prima
dell’urto.
Ripetendo l’esperimento usando una sferetta A di massa doppia rispetto
a B, inizialmente sempre ferma, si trova che dopo l’urto entrambe le
v A e con velocità
sferette si muovono nel verso di
4
vB vA.
3
6
1
vA vA
3
e
2. Quantità di moto e sistemi isolati.
Tutti gli esperimenti di interazione tra due corpi sopra esposti, possono
essere considerati come esempi di conservazione della quantità di moto.
2.1 Quantità di moto.
Si definisce quantità di moto Q di una particella di massa m e velocità
v la grandezza vettoriale:
Q mv
(1)
La quantità di moto è dunque un vettore avente per direzione e verso
quelli di v e modulo uguale al prodotto della massa per il modulo della
velocità.
L’equazione dimensionale risulta:
Q mlt
1
e l’ unità di misura nel sistema SI è kg
(2)
m
.
s
La quantità di moto di un sistema formato da più particelle si definisce
come la somma vettoriale delle quantità di moto delle singole particelle.
7
Considerando l’esempio precedente dell’urto fra le due sferette
metalliche si può far vedere che, in entrambi i casi, pur variando le
quantità di moto delle singole sferette, nell’urto si conserva la quantità di
moto totale del sistema composto dalle due sferette.
2.2 Sistema isolato.
Precisiamo cosa si intende per sistema isolato al fine di poter
generalizzare la conservazione della quantità di moto.
Un sistema di due o più corpi si dice isolato quando si può considerare
trascurabile ogni interazione con corpi materiali che non fanno parte del
sistema. Se consideriamo le forze agenti su un corpo di un sistema,
queste si possono distinguere in due categorie, quella delle forze
interne e l’altra delle forze esterne.
Si definisce interna la forza agente su un corpo del sistema e dovuta
all’azione di un altro corpo del sistema, mentre sarà detta esterna la
forza agente su un corpo del sistema e dovuta all’azione di altri corpi che
non fanno parte del sistema.
8
Allora diremo che un sistema è isolato se non agiscono sui suoi corpi
forze esterne, oppure se la risultante delle forze esterne è nulla o se le
forze esterne sono trascurabili rispetto a quelle interne.
2.3 Conservazione della quantità di moto.
Tutti i fenomeni avvengono in modo da rispettare il cosiddetto principio
di conservazione della quantità di moto:
In un sistema isolato la quantità di moto totale rimane costante nel
tempo, se misurata rispetto ad un sistema inerziale.
Naturalmente ciò che rimane costante è la quantità di moto totale del
sistema, mentre la quantità di moto di un singolo corpo del sistema può
variare.
Negli esperimenti descritti nel paragrafo precedente la quantità di moto si
mantiene costante, in quanto i sistemi considerati sono isolati.
9
3. Urti.
Con l’espressione urti fra due corpi si intende una qualsiasi interazione
fra due o più corpi, senza che necessariamente ci sia un contatto.
Sono esempi di urti gli esperimenti descritti nel primo paragrafo.
3.1 Conservazione della quantità di moto negli urti.
In tutti i tipi di urti, durante l’interazione si sviluppano forze molto intense,
rispetto alle quali le forze esterne si possono considerare trascurabili.
Da ciò segue che in tutti gli urti la quantità di moto totale del sistema si
mantiene costante.
3.2 Classificazione degli urti.
Gli urti si classificano in due categorie, a seconda della conservazione o
meno dell’energia cinetica.
Urti elastici: se l’energia cinetica del sistema si conserva;
Urti anelastici: se l’energia cinetica del sistema non si conserva.
10
La conservazione dell’energia cinetica quindi, avendosi solo per alcuni
urti, non rappresenta un principio di carattere generale, come invece è la
conservazione della quantità di moto di un sistema isolato.
In generale sono elastici gli urti fra due sferette metalliche o fra due palle
da biliardo.
Se dopo l’urto i due corpi restano attaccati, muovendosi poi con la stessa
velocità, l’urto è detto totalmente anelastico.
C’è da dire però che gli urti che comunemente avvengono non sono
quasi mai né perfettamente elastici né totalmente anelastici.
Sono esempi di urti totalmente anelastici quello fra due automobili che
restano attaccate una all’altra dopo l’urto, oppure quello di una pallottola
sparata contro un sacco di sabbia, che la trattiene.
Se supponiamo di essere nel caso di un urto totalmente anelastico fra
due corpi, basterà conoscere le due masse m1 ed m2 e le loro velocità
v 1 e v 2 prima dell’urto per determinare la velocità del sistema dei due
corpi dopo l’urto.
Per la conservazione della quantità di moto si ha:
m1v 1 m2v 2 m1 m2 v
11
(3)
da cui:
m1v 1 m2v 2
v
m1 m2
(4)
Nel caso di urti fra due corpi che si muovono su una retta, si possono
usare i moduli delle velocità anziché le velocità vettoriali, attribuendo un
segno per distinguere il verso del moto.
12
3.3 Urti elastici in una dimensione.
Affrontiamo ora il caso di due sferette che si muovono sia prima che
dopo l’urto lungo una stessa traiettoria rettilinea, ovvero parliamo di urto
in una dimensione. Questo tipo di urto viene anche chiamato normale o
centrale.
Date le velocità v 1 e v 2 delle sferette prima dell’urto e le rispettive masse
m1 ed m2 vediamo di calcolare le velocità V1 e V2 delle suddette sferette
dopo un urto normale ed elastico.
Per la conservazione della quantità di moto e dell’energia cinetica si ha:
m1v 1 m2v 2 m1V1 m2V2
1
1
1
1
m1v 12 m2v 22 m1V12 m2V22
2
2
2
2
(5)
dalla seconda equazione si ricava:
m1 v 1 V1 v 1 V1 m2 V2 v 2 V2 v 2
13
(6)
mentre dalla prima segue:
m1 v 1 V1 m2 V2 v 2
(7)
Eseguendo il rapporto membro a membro fra queste ultime due relazioni
si ottiene:
v 1 V1 V2 v 2
(8)
V2 v 1 V1 v 2
(9)
da cui si ricava facilmente
che sostituita nella prima equazione del sistema (5), dà:
m1v 1 m2v 2 m1V1 m2 v 1 V1 v 2
(10)
Ora possiamo ricavare V1
V1
m
1
m2 v 1 2m2v 2
m1 m2
(11)
V2 può essere ricavato osservando che il sistema (5) è simmetrico
rispetto a
V1 e V2 , quindi è sufficiente scambiare gli indici 1 e 2
nell’espressione di V1 .
14
In definitiva le velocità delle sferette dopo l’urto sono:
m1 m2 v 1 2m2v 2
V1
m1 m2
V m2 m1 v 2 2m1v 1
2
m1 m2
(12)
Vediamo come diventano queste espressioni in alcuni casi particolari.
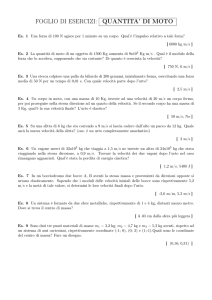
SFERETTE DI UGUALE MASSA: m1 m2 m
Sostituendo i valori delle masse nel sistema (12) si ricava che:
V1 v 2
e
V2 v 1
(13)
Quindi le due sferette di massa uguale si scambiano le velocità
dopo un urto normale ed elastico.
1
v1
v2 2
1
Prima dell’urto
2
Dopo l’urto
15
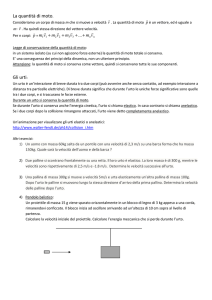
SFERETTE DI UGUALE MASSA DI CUI UNA FERMA:
m1 m2 m ; v 2 0
Sostituendo i valori delle masse e della velocità della seconda
sferetta nel sistema (12) si ricava che:
V1 0 ;
V2 v 1
(14)
Quindi la prima sferetta si ferma e la seconda parte con la velocità
che aveva la prima.
1
v1
2 v2=0
Prima dell’urto
1
2
Dopo l’urto
16
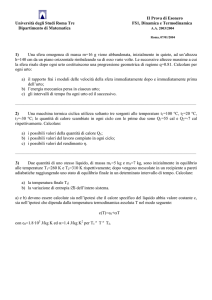
URTO DI UNA SFERETTA CONTRO UNA PARETE FISSA:
Essendo la parete ovviamente ferma si avrà v 2 0 .
Si può considerare la massa m1 della sferetta trascurabile rispetto
alla massa m2 della parete.
Dal sistema (12) dividendo numeratore e denominatore per m2 e
ponendo
m1
0 , si ha:
m2
m1
1v 1
m
v
V1 2
1
m1
1
m2
m1
v1
m2
V2
0
m1
1
m2
2
(15)
Quindi la sferetta urtante torna indietro con la stessa velocità di
prima.
m2=
2 v2=0
1
2
1
v1
Prima dell’urto
Dopo l’urto
17
3.4 Urti obliqui.
Affrontiamo ora il caso di due sferette che sono libere di muoversi in un
piano, ovvero parliamo di urto in due dimensioni. Questo tipo di urto
viene anche chiamato obliquo.
3.4.1 Urto elastico obliquo di due sferette di cui una ferma.
Studiamo il moto di una sferetta di massa m1 e velocità v 1 che urta
elasticamente ed obliquamente una sferetta di massa m2 inizialmente
ferma.
Scegliamo un sistema di riferimento cartesiano ortogonale con origine su
m2 e avente l’asse x coincidente con la direzione di v 1 prima dell’urto.
Le sferette dopo l’urto assumono velocità v 1 e v 2 formanti gli angoli θ e
φ con la direzione positiva dell’asse x .
18
y
v1
v1
θ
m2
φ
m1
x
v2
Tenendo conto della conservazione della quantità di moto e dell’energia
cinetica si ha il seguente sistema:
m1v 1 m1v 1 m2v 2
1
1
1
2
2
2
2 m1v 1 2 m1v 1 2 m2v 2
19
(16)
Proiettando la prima equazione del sistema (16) lungo gli assi x e y si
ottiene:
m1v 1 m1v 1 cos θ m2v 2 cos φ
0 m1v 1 sin θ m2v 2 sin φ
1
1
1
m1v 12 m1v 1 2 m2v 2 2
2
2
2
Il sistema, di tre equazioni in quattro incognite
(17)
, , v, v ,
1
2
non è
sufficiente per determinare le soluzioni; è perciò necessario avere
qualche informazione in più, ad esempio possiamo supporre di
conoscere l’angolo θ .
Per risolvere il sistema (17), osserviamo che le prime due relazioni
precedenti possono scriversi nella forma:
m1v 1 m1v 1 cos θ m2v 2 cos φ
m1v 1 sin θ m2v 2 sin φ
(18)
da cui elevando al quadrato ambo i membri e poi sommando membro a
membro, si ottiene l’equazione:
m1 v 1 m1 v 1 2m1 v 1v 1 cos θ m2 v 2
2
2
2
2
2
20
2
2
(19)
Eliminando v 2 tra la terza equazione del sistema (17) e la precedente
2
(19) si ha:
m
2
1
m1m2 v12 (2m12v1 cos ) v1 m12v12 m1m2v12 0
(20)
che è una equazione di secondo grado nell’incognita v 1 , il cui
discriminante è
Δ m1 v 1 cos 2 θ m1 v 1 m1 m2 v 1
4
2
4
2
2
2
2
(21)
Pertanto il problema ha soluzioni per Δ 0 , cioè se risulta:
θ arcsin
m2
m1
(22)
A questo punto è necessario distinguere tre casi.
1° caso: m2 m1
Risulta sempre Δ 0 e l’equazione (20) presenta una variazione e una
permanenza. Il problema ammette una soluzione in cui v 1 è la radice
positiva della (20):
m12v1 cos θ Δ
v1
m12 m1m2
21
(23)
e i corrispondenti valori di v 2 e φ si ottengono sostituendo prima nella
terza e poi nella seconda delle (17) rispettivamente v 1 e v 2 e θ .
2° caso: m2 m1
La (22) è soddisfatta per θ
π
e la (20) ammette le soluzioni:
2
v1 0
v1 v1 cos θ
(24)
i cui corrispondenti valori di v 2 e φ si ottengono sostituendo prima nella
terza e poi nella seconda delle (17). Con facili calcoli si perviene alle due
soluzioni:
v 1 v 1 cos θ
v 2 v 1 sin θ
π
φ
θ
2
v 1 0
v 2 v 1
φ 0
(25)
di cui la prima corrisponde al caso dell’urto centrale elastico in cui la
prima sferetta si ferma e la seconda parte con la velocità della prima.
3° caso: m2 m1
La (20) ammette due radici positive se è soddisfatta la (22). Il problema
perciò ammette due soluzioni per i valori di θ che soddisfano la (22).
22
3.4.2 Urto obliquo anelastico e totalmente anelastico.
Nel caso di urto anelastico l’ultima equazione del sistema (16) non è più
valida, allora proiettando la rimanente equazione lungo gli assi x e y si
ottiene:
m1v 1 m1v 1 cos θ m2v 2 cos φ
0 m1v 1 sin θ m2v 2 sin φ
(26)
Notiamo che ancora una volta il numero delle incognite è maggiore del
numero delle equazioni per cui il sistema non è risolubile.
Potremmo immaginare di conoscere il valore di due delle quattro
incognite, ad esempio θ e φ , in modo da semplificare il problema.
In realtà in un urto anelastico la relazione che esprime la conservazione
dell’energia cinetica può essere sostituita con un’altra che tiene conto
della conversione dell’energia cinetica in altre forme di energia, o
viceversa.
In questo modo avendo a disposizione un ulteriore relazione tra le
energie cinetiche iniziali e finali il sistema diventa risolubile.
23
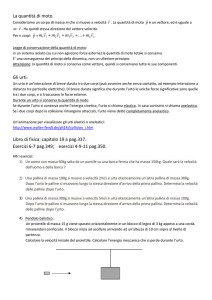
Consideriamo ora l’urto obliquo totalmente anelastico. Abbiamo già detto
che dopo l’urto il sistema dei due corpi viaggerà insieme con la stessa
velocità.
Fissiamo un sistema di riferimento cartesiano ortogonale avente origine
coincidente con il punto in cui i due corpi, urtandosi rimangono uniti.
Supponiamo che la massa m1 proceda con velocità v 1 avente la
direzione dell’asse x del nostro sistema di riferimento, mentre la massa
m2 la immaginiamo provenire dal semiasse negativo delle y con velocità
v 2 . Dopo l’urto il sistema m1 m2 si muoverà con velocità v F .
y
vF
θ
m1
v1
x
v2
m2
24
Tenendo conto della conservazione della quantità di moto proiettata
lungo gli assi otteniamo il sistema:
m1v 1 ( m1 m2 )v F cos θ
m2v 2 (m1 m2 )v F sin θ
(27)
dove θ è l’angolo che v F forma con l’asse x .
In questo caso non abbiamo più quattro incognite, come nel caso
elastico, essendosi queste ridotte alle sole v F e θ . Il sistema risulta così
sufficiente per descrivere il moto e quindi risolubile.
25
Parte applicativa.
La scoperta del neutrone.
Molte scoperte e invenzioni sono avvenute assolutamente per caso ma,
come diceva anche il biologo francese Louis Pasteur, “il caso favorisce
solo le menti più preparate”. Talvolta, anche attraverso le menti più
eccelse passa, inatteso, un avvenimento di portata universale e resta,
tuttavia, inosservato. E’ questo il caso della scoperta del neutrone, la
particella che assieme al protone costituisce il nucleo dell’atomo.
Era il gennaio del 1932 quando i coniugi Joliot-Curie stavano
sperimentando le proprietà di una particolare radiazione ottenuta
bombardando, con particelle (nuclei di elio) molto veloci, campioni di
boro e di berillio.
A quel tempo protone ed elettrone erano già stati scoperti; il primo, di
carica positiva, come costituente fondamentale del nucleo atomico e il
secondo come particella di carica negativa che gira intorno al nucleo al
pari di un pianeta che gira intorno al Sole. Si presumeva però che oltre ai
protoni, nei nuclei atomici più complessi, vi dovessero essere altre
particelle dotate di massa ma non di carica.
26
Queste supposte particelle neutre non erano facili da osservare proprio
perché prive di carica, mentre i sistemi di rilevazione in uso a quei tempi
erano tarati solo per individuare le particelle provviste di carica.
La radiazione molto intensa proveniente dal boro e dal berillio (colpiti
dalle particelle ) veniva diretta su un blocco di paraffina dal quale
usciva un gran numero di protoni.
In un primo momento Irène Curie e il marito Frédéric Joliot pensarono
che tale processo fosse attribuibile alla formazione di una radiazione
elettromagnetica simile ai fotoni .
Sennonché, in base ai calcoli, l’energia della radiazione che emergeva
dai due metalli e il numero dei protoni che uscivano dal blocco di
paraffina erano quantitativamente molto maggiori di quelli previsti
teoricamente e ciò sembrava violare alcune leggi fisiche fondamentali.
James Chadwick (1891-1974), allievo e collaboratore di Rhuterford,
riprese le ricerche dei coniugi Curie e rifacendo l’esperimento finì per
scoprire l’esistenza del neutrone ottenendo, per questo successo, il
premio Nobel nel 1935.
27
Il suo lavoro può essere schematizzato nel modo seguente:
1) urto -berillio per ottenere la radiazione neutra penetrante;
Po
particelle neutre v x
Be
2) interazione radiazione neutra-paraffina con produzione di protoni;
vx
paraffina
protoni v P
particelle
neutre v x
3) interazione radiazione neutra-azoto con emissione di nuclei di azoto.
vx
azoto
nuclei
di azoto v N
28
particelle
neutre v x
Indicando con m x , v x e v x rispettivamente la massa e le velocità prima e
dopo l’urto delle particelle incognite (neutroni) nelle interazione
radiazione neutra-paraffina e radiazione neutra-azoto e applicando la
conservazione dell’energia cinetica e della quantità di moto, ottenne i
seguenti due sistemi:
(a)
m x v x m x v x mP v P
1
1
1
2
2
m
v
m
v
mP v P2
x
x
x
x
2
2
2
dove m P e v P rappresentano rispettivamente la massa e la velocità del
protone espulso dalla paraffina;
(b)
m x v x m x v x mN v N
1
1
1
m x v x2 m x v x2 mN v N2
2
2
2
dove mN e v N rappresentano rispettivamente la massa e la velocità del
nucleo di azoto.
29
Risolvendo i due sistemi in funzione di v x ricavò:
2m x
v P m m v x
x
P
(a)
v m x mP v
x m x mP x
2m x
v N m m v x
x
N
(b)
v m x mN v
x m x mN x
Facendo il rapporto membro a membro tra la prima relazione del sistema
(a) e la prima del (b) ottenne:
v P mx mN
.
v N mx mP
Inoltre, dalle misure sperimentali risultava
vP
7,5 e
vN
mN 14mP ,
essendo 14 la massa atomica dell’azoto e 1 quella dell’idrogeno.
30
Sostituendo questi valori nell’ultima relazione trovata poté scrivere:
mx 14mP
7.5
mx mP
e quindi:
mx 14mP 7,5mx 7,5mP ,
da cui
m x mP .
Chadwick dimostrò che esiste una particella neutra con massa uguale a
quella del protone: il neutrone.
L’applicazione dei principi di conservazione permise di approfondire la
conoscenza della natura.
31