UNIVERSITA’ DEGLI STUDI DI PADOVA
DOTTORATO DI RICERCA IN MECCANICA
APPLICATA, XIX CICLO.
ANNO ACCADEMICO 2004/2005
Tecniche di controllo di forza di
tipo “Non Time Based”
Dottorando:
Paolo Pascutto1
Tutore:
Co-turore:
1
prof. Aldo Rossi2
prof. Paolo Gallina1
Dip. di Ingegneria Meccanica, Università di Trieste, Via A. Valerio 10 - 34127, TS;
[email protected]
Tel: +39 (040) 558 2540.
[email protected]
1
2
Dip. di Innovazione Meccanica e Gestionale, Università di Padova
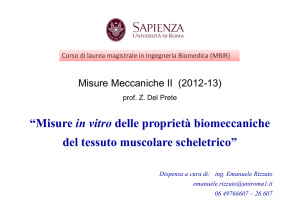
Attività precedenti
DRC:
xd xd (l ) xd (t T )
t
T Fc (t ) dt
a influenza forza di equilibrio
0
t
t-T
Planner
+-
T
xd
e
PD
+-
u
x
Plant
x
Interaction
model
T
Fp
DRC Block
2
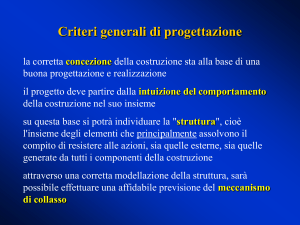
Attività precedenti
interazione
“viscosa”
interazione
“elastica”
.
Fp =Fp(x)
Fc =Fc(x)
c
c
3
Risultati
interazione
interazione
“elastica”
“viscosa”
Fc 1
Dove:
- qm, cm dipendono dal materiale
- b dipende dalla pianificazione
della traiettoria
4
Difetto :
- La forza di quilibrio dipende da a e dai parametri che
identificano la relazione F-v.
Sviluppi Futuri del DRC:
- Studio di un DRC che consenta di settare la forza di equilibrio
con un solo parametro, indipendentemente dalla relazione F-v
(DVRC ?)
5
Teoria del DVRC – background (Delayed Velocity Reference Control)
Fp
Fmax
x
.
Fp =Fp(x)
x
veq
Per mantenere Fp = Fmax
Fp < Fmax
incrementare x
Fp = Fmax
mantenere x
Fp > Fmax
ridurre x
xd ((Fp ) )=0
0
xd 0 per Fp Fp
xd 0 per Fp Fp
6
Teoria del DVRC – background (Delayed Velocity Reference Control)
Fp
xd ( Fp ) Amax 1
F
max
dx
d d
dt
1
A
1
F
max
p dt
x
Fmax
t
t
t 1
t
1
dxd
Fp dt Fp dt
Amax t
Fp dt Amax t Fp dt Amax t T T
F
dt
0 max
0
0 Fmax
0
Fp < Fmax
incrementare
x
Fp = Fmax
mantenere
Fp > Fmax
ridurre
xd ((Fp ) )=0
0
xd 0 per Fp Fp
xd 0 per Fp Fp
7
Teoria del DVRC – background (Delayed Velocity Reference Control)
Fp
xd ( Fp ) Amax 1
F
max
dx
d d
dt
1
A
1
F
max
p dt
Fmax
1
t 1
t
dxd
T
Fp dt Fp dt
Amax t
Fp dt Amax t Fp dt Amax t T
F
dt
0 max
0
0 Fmax
0
t
t
dxd Amax t T dt
t t 1Fp
dtdt AAmax
xdd AAmax
t
T
dt
A
t
F
dt
m
t
T
dt
A
t
dt
max
p
max
max
max
Fmaxmax
00
00
00 F
tt
tt
t
t T dt
0
xd ( Fp ) 0
xd 0 per
xd 0 per
Fp Fp
Fp Fp
Da qui ha origine
il nome DVRC
8
Teoria del DVRC
m x c x kP xd x kD xd x Fp ( x)
def
1
F x
Fp x
Fmax
t
T F dt
0
t
t T dt
0
t t
t
xd g ( ) g t T dt g t F dt dt
0
0 0
x
dg
mx c kd x k P x k P g k D Fp x
dt
dg
mx c kd x k P x k P g k D Fmax F x
dt
- Condizione di equilibrio
- Stabilità
9
DVRC - equilibrio
dg
mx c kd x k P x k P g k D Fp x
dt
dg
mx c kd x k P x k P g k D Fmax F x
dt
[…]
1 F 0
F 1 Fp Fmax 1
- Condizione di equilibrio indipendente da legame F-v
- Forza di equilibrio settata con un solo parametro
10
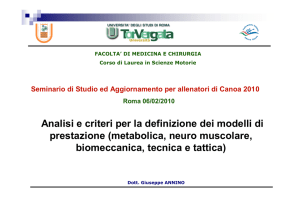
DVRC - equilibrio
1 F 0
F 1 Fp Fmax 1
F F x
F
Fp
Fmax
.
Fp =Fp(x)
veq
Zona “pericolosa”
1
Zona
Produttività
ridotta
x
veq
P.To funzionamento ottimale
DVRC tende a mantenere invariato il punto di funzionamento
Significato FF: collegato a grado di pericolosità
11
DVRC – Osservazione
dg
xd
1 F
d
F
Fp
Fmax
xd 0
1
- Work –
Optimum Condition
xd cost
Risultato cercato
F
Fp
Fmax
0
xd cost
- NOT Working –
Null force
xd t 2
Problema
Si accoppia un controllo di velocità al controllo di forza
12
DVRC – Controllo di Velocità
def
1
F x
Fp x
Fmax
t
T F dt
funzione F
def
V
Velocity delay
Vmax
t
T V dt
0
0
t
t
t T dt (t )
t T dt (t )
0
0
t
x d g g t T dt
0
Fp Fmax
x
t
x d g g t T dt
0
Risultato DVRC
x Vmax
13
DVRC - equilibrio
1 V 0
V 1 x Vmax
x
V V x
V
Vmax
Zona “pericolosa”
1
Zona
Produttività
ridotta
Vmax
Vmax
x
x
P.To funzionamento ottimale
DVRC tende a mantenere invariato il punto di funzionamento
Significato FV: collegato a grado di pericolosità
14
DVRC – Unione Controlli F-V
def
1
F x
Fp x
Fmax
max F , V
def
V
x
Vmax
t
T dt
E’ scelta a favore della
sicurezza
0
t
t T dt (t )
0
t
x d g g t T dt
0
15
DVRC – Unione Controlli F-V
h
Planner
xd
e
PD
+-
u
x
Plant
x
Interaction
model
h
T
max F , V
F
V
Fp
.
x
DVRC Block
16
DVRC - stabilità
- Trattazione unica per controllo di forza/velocità
xd
dg
1 F 1 F
d
Accelerazione massima consentita:
Ha un massimo!
NB. b=Amax
17
DVRC – Test Setup
-NI 6024E
-NI CVI compiler
-1kHz
- load cell FUTEK LRF300
18
DVRC – Hotwire
x (t ) v v sin( t )
F (t ) F F sin( t )
v 1mm s
v 3 mm s
6.28 rad s
F (t ) F F sin( t )
19
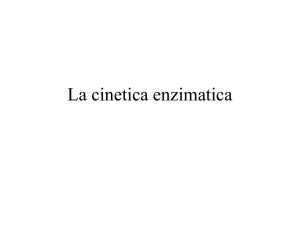
DVRC – Risultati Test
Vmax 0.005 m / s
Fmax 0.22 N
Amax 0.1 m s 2
Moto libero
Taglio EPS
20
DVRC – Risultati Test
Vmax 0.005 m / s
Fmax 0.22 N
Amax 0.1 m s 2
Moto libero
Taglio EPS
21
DVRC – Risultati Test
Vmax 0.005 m / s
Fmax 0.22 N
Amax 0.1 m s 2
Moto libero
Taglio EPS
22
DVRC – Conclusioni
Il DRC aveva mostrato dei difetti nei casi in cui l’inerazione è velocity dependant
Questa è stata la motivazione che ha richiesto lo sviluppo di un nuovo controllo NTB
Il DVRC sviluppato consente di settare, per un task, la forza ottimale, la velocità
ottimale di moto libero e l’accelerazione massima del corpo.
Simulazioni e test sperimentali hanno confermato i risultati teorici
Il lavoro è stato pubblicato sull’International Journal of Machine Tools and Manifacture
23
UNIVERSITA’ DEGLI STUDI DI PADOVA
DOTTORATO DI RICERCA IN MECCANICA
APPLICATA, XIX CICLO.
ANNO ACCADEMICO 2004/2005
Tecniche di controllo di forza di
tipo “Non Time Based”
Dottorando:
Paolo Pascutto1
Tutore:
Co-turore:
1
prof. Aldo Rossi2
prof. Paolo Gallina1
Dip. di Ingegneria Meccanica, Università di Trieste, Via A. Valerio 10 - 34127, TS;
[email protected]
Tel: +39 (040) 558 2540.
[email protected]
24
2
Dip. di Innovazione Meccanica e Gestionale, Università di Padova