Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
Modellazione statistica: approccio parametrico e non
parametrico
1.
La modellazione stocastica
Uno degli obiettivi principali che un analista si prefigge di raggiungere è
quello di poter fare previsione su una certa variabile d'interesse.
È fondamentale, al riguardo, tenere ben presente la netta differenza
esistente fra previsione e predizione: mentre prevedere significa “supporre
ciò che avverrà o come si svolgeranno in futuro gli eventi basandosi su
indizi più o meno sicuri, su induzioni, ipotesi e congetture”, predizione
vuol dire “annunciare in precedenza l'avverarsi di cose future per
ispirazione profetiche”; si comprende bene, quindi, l'impossibilità di
ottenere “previsioni certe” attraverso la previsione scientifica.
La previsione scientifica consente di poter prevedere il valore di una certa
variabile, sulla base dei valori osservati per altre variabili e/o per la stessa,
ma in periodi antecedenti.
Per raggiungere questo obiettivo è necessario considerare un modello
statistico-matematico, che rappresenti la relazione esistente fra le variabili
oggetto di studio.
Formalmente: dato un vettore d-dimensionale di variabili esplicative
x = ( x1 , x 2 ,
, x d ) t e una variabile casuale continua y, detta variabile risposta,
si ha la seguente relazione:
y = f (x) + ε
(1)
1
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
dove f è una funzione reale non nota, spesso non lineare, definita su un
insieme compatto D ⊂ ℜ d , ed ε è una variabile casuale non osservabile,
con valore atteso nullo.
Lo scopo dell'analista è quello di stimare la funzione f, sulla base di un
insieme finito di n osservazioni: {( x 1 , y1 ), ( x 2 , y 2 ), , ( x n , y n )} , dove la coppia
( x t , y t ) rappresenta il valore osservato del vettore x e della variabile y al
tempo t. Ovviamente, fra le componenti del vettore x t possono esserci
anche valori antecedenti della variabile yt .
In letteratura esistono diversi approcci per stimare la funzione f.
Un primo approccio è il cosiddetto “parametrico”, in cui si definisce la
forma funzionale della funzione f, dipendente da un insieme finito di
parametri da stimare; tale approccio è valido solo nel caso in cui la vera
funzione f è uguale (o approssimativamente uguale) alla funzione
parametrizzata, in caso contrario si possono ottenere risultati fuorvianti.
Un altro approccio è quello definito “non parametrico”, in cui si fanno
pochissime assunzioni sulla funzione da stimare. I metodi non parametrici
sono basati su medie locali d-dimensionali: preso un valore x 0 ∈ D , si stima
f ( x 0 ) effettuando una media ponderata delle y osservate in un intorno di.
x 0 . Tali tecniche sono difficilmente applicabili nel caso in cui d sia elevato,
a causa del problema, definito da Bellman, “maledizione della
dimensionalità”, ossia “se nel caso unidimensionale un intervallo di
variazione viene diviso in m sottointervalli e quindi richiede la stima di m
parametri, nel caso bidimensionale il campo di variazione della coppia di
variabili viene diviso in m 2 rettangoli (e quindi la stima di m 2 parametri),
nel caso generale d-dimensionale, il campo di variazione delle d variabili
viene suddiviso in m d rettangoloidi (e quindi la stima di m d parametri)”.
2
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
Un approccio applicabile, nel caso di elevata dimensione dello spazio dei
predittori D, è quello di considerare M funzioni non lineari parametrizzate
(dette funzioni base) e quindi di ipotizzare la funzione f
come una
combinazione lineare di tali funzioni base, ossia:
M
f ( x) = ∑ β m ⋅ φ m ( x;α m )
(2)
m =1
dove α m è un vettore di parametri che definisce completamente la funzione
φ m e β1 , β 2 ,
, β M sono i coefficienti delle funzioni base.
I vettori α m e β 1 , β 2 , , β M sono tutti parametri da stimare, sulla base di un
campione di dati.
Una curva di regressione descrive una generale relazione fra una o più
variabili esplicative x e una variabile risposta y. Condizionandosi ai valori
osservati delle variabili esplicative, il valore atteso di y è dato dalla
funzione di regressione. È molto interessante avere qualche conoscenza su
questa relazione: la forma delle funzione di regressione permette di sapere
dove è lecito aspettarsi di osservare valori più alti della y in corrispondenza
di certi valori x.
Qualora x sia unidimensionale, è possibile cercare di capire la forma
funzionale di f rappresentando in un asse cartesiano le coppie (xi , y i ) , ma
non sempre tale rappresentazione riesce a far comprendere la sottostante
relazione fra le due variabili.
Per stimare la funzione di regressione f si segue spesso il cosiddetto
approccio parametrico, nel quale si assume che la curva media f abbia
qualche forma funzionale specificata a priori. Alternativamente si può
seguire un approccio di stima non parametrica, nel quale non si fa
riferimento a nessuna forma funzionale definita a priori.
3
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
Nel primo approccio per analizzare la relazione di regressione, ossia quello
parametrico, si assume che la forma funzionale f sia completamente
descritta per mezzo di un insieme finito di parametri ignoti.
Nel secondo approccio, cioè non parametrico, non si specifica a priori né la
funzione f, né la distribuzione probabilistica dell’errore ε .
L’utilizzo dei due diversi approcci comporta particolari vantaggi e
svantaggi. Pearson sostiene che il prezzo da pagare per un adattamento
parametrico è la possibilità di ottenere risultati con errori di specificazione
elevati, ossia modelli altamente distorti. Fisher, invece, sostiene che la
considerazione di modelli non parametrici, fornisce risultati meno
interessanti. È comunque possibile combinare i due approcci in modo da
ottenere i vantaggi di entrambi i metodi e quindi seguire un approccio di
tipo semiparametrico.
Qualora non si abbiano informazioni a priori riguardo la curva di
regressione, l’analisi non parametrica può essere d’aiuto nel suggerire una
semplice formulazione parametrica della stessa.
2.
Approccio parametrico
Ciò che contraddistingue l’approccio di stima parametrico è il fatto che la
funzione che lega la variabile risposta con le variabili esplicative, o
predittori, è completamente specificata e dipende da un set di parametri
ignoti.
La scelta della forma funzionale proviene principalmente da considerazioni
di carattere teorico, tuttavia, solitamente queste non bastano per scegliere
un’unica forma funzionale, ma suggeriscono una classe di funzioni. Molto
spesso si cerca una forma funzionale appartenente alla classe di funzioni
4
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
che soddisfano i segni delle prime derivate della funzione. Per esempio, se
si vuole studiare una variabile y che ha un andamento crescente al crescere
dei valori della singola variabile esplicativa x, si deve adottare una funzione
che abbia la derivata prima sempre positiva, in accordo a quanto suggerito
dalla teoria. Purtroppo però le funzioni che soddisfano tale proprietà sono
moltissime, per cui la scelta della funzione da adottare dovrà essere fondata
su altre considerazioni.
L’utilizzo di tecniche parametriche è molto utile se ogni parametro del
modello ha un particolare significato; per esempio, considerando la
funzione del consumo keynesiana C = C 0 + cY + ε , dove C è il consumo e Y
è il reddito disponibile, il parametro c esprime l’incremento che il consumo
subisce in seguito ad un incremento unitario del reddito e rappresenta,
quindi, il noto concetto di propensione marginale al consumo.
Se invece si ipotizza una funzione di tipo moltiplicativo, linearizzabile
passando ai logaritmi, i parametri considerati esprimono un concetto molto
interessante, ossia quello di elasticità; per esempio, considerando la
funzione di produzione di Cobb-Douglas Y = aLb K c ε e passando ai
logaritmi log Y = log a + b log L + c log K + log ε , dove Y è la quantità prodotta,
L rappresenta il fattore lavoro e K il fattore capitale, il parametro b indica
l’elasticità della produzione rispetto al lavoro, mentre c indica l’elasticità
della produzione rispetto al capitale, ossia indicano l’incremento relativo
che la produzione subisce in seguito ad un incremento dell’1% del lavoro e
rispettivamente del capitale.
Non sempre, purtroppo, si riesce ad attribuire un significato ai parametri
del modello, soprattutto quando la forma funzionale definita è
particolarmente complessa.
5
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
Usualmente, non si sceglie a priori una sola forma funzionale che lega x e
y, ma si preferisce selezionare un insieme relativamente limitato di possibili
relazioni. Successivamente si stimano i vari modelli selezionati, sulla base
del campione di osservazioni disponibili, e quindi si sceglie il modello
giudicato “migliore”, in base ad un particolare funzione obiettivo che
misura la distanza fra valori osservati e valori previsti.
Fra le funzioni selezionate a priori conviene sempre includere un modello
di regressione lineare, poiché è un modello veloce da stimare, è possibile
attribuire un significato ai parametri e soddisfa il principio di parsimonia.
Molto spesso modelli non lineari abbastanza complessi, piuttosto difficili
da stimare, conducono a risultati simili a quelli ottenuti attraverso un
semplice modello di regressione multipla, per cui in tal caso si preferisce
adottare quest’ultimo modello, che essendo più semplice da implementare
potrà essere facilmente riutilizzato, ad esempio per prevedere futuri valori
della variabile risposta y.
Oltre alla semplicità di implementazione del modello lineare, si aggiunga
che in tale situazione sono note le forme distributive degli stimatori e di
loro particolari funzioni; inoltre la teoria inferenziale associata è quella
cosiddetta “esatta”, mentre nell’ambito della modellazione non lineare
spesso si fa riferimento a distribuzioni asintotiche, in quanto non sono note
le distribuzioni esatte, che presuppongono la presenza di campioni di
grosse dimensioni, sebbene il campione disponibile sia spesso di
dimensioni ridotte.
In molti casi, sebbene il modello iniziale non sia esattamente lineare, è
possibile linearizzarlo per mezzo di una qualche trasformazione.
È bene sottolineare che un modello si definisce lineare se la funzione è
lineare rispetto ai parametri e non rispetto le osservazioni. Il modello
moltiplicativo, come quello di Cobb-Douglas descritto in precedenza, è un
6
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
esempio di modello non lineare, ma linearizzabile. Il modello
1
y = expa + b non è lineare, ma è linearizzabile se si passa ai logaritmi,
x
infatti il modello log y = a + b
1
è lineare rispetto i due parametri (a,b).
x
Sebbene la relazione regressiva non sia di tipo lineare, è tuttavia possibile
adottare un modello lineare nei parametri, ma polinomiale nelle
osservazioni, che approssimi la reale funzione non lineare; quanto
affermato è una conseguenza del teorema di Taylor, in base al quale una
qualsiasi funzione continua e derivabile di ordine n è sviluppabile in un
polinomio, per cui se f è una funzione reale continua e derivabile di ordine
n, allora vale:
f ( x) = f ( x0 ) + f ' ( x0 )( x − x 0 ) +
+
1
f
n!
( n)
1
f ' ' ( x 0 )( x − x 0 ) 2 +
2
+
1
f
(n − 1)!
( n −1)
( x 0 )( x − x0 ) n−1 +
(ξ )( x − x 0 ) n .
Tale sviluppo vale anche nel caso multidimensionale, per cui in linea
teorica l’approssimazione lineare è valida anche nel caso di spazio dei
predittori multidimensionale.
Nella pratica però si hanno solamente n osservazioni, per cui un polinomio
di grado (n-1) si adatta perfettamente ai dati e non è quindi generalizzabile.
Bisogna quindi considerare un polinomio di ordine inferiore e verificare se
il suo adattamento è ritenuto soddisfacente o meno.
Qualora tale modello non sia ritenuto “buono”, allora è indispensabile
considerare una funzione non lineare, sebbene sia di più difficile
implementazione.
In generale la relazione fra le variabili y ed x, che può essere anche un
vettore, si può esplicitare nel seguente modo:
y = f (x;θ ) + ε .
7
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
Il vettore θ è costituito da tutti i parametri che specificano completamente
la funzione f, mentre ε è una variabile casuale sulla quale occorre
formulare alcune ipotesi distributive, al fine di considerare un algoritmo di
stima efficiente.
Disponendo di un campione di n osservazioni {(xi , y i )}in=1 provenienti dal
vettore aleatorio (x,y), la precedente relazione è valida in corrispondenza di
ogni osservazione (xi , y i ) , per cui vale:
y i = f ( x i ;θ ) + ε i
∀i = 1,2,..., n
Al fine di impiegare un algoritmo di stima efficiente è necessario formulare
alcune ipotesi sulle variabili casuali non osservabili {ε i }.
Una prima ipotesi è che la loro media sia nulla, per ogni i, da ciò ne
scaturisce che il valor medio di y condizionatamente ad x è pari a f ( x;θ ) ,
cioè:
E [y | x ] = f ( x;θ ) .
Dalla precedente equazione si comprende meglio l’importanza della forma
funzionale scelta, in quanto una funzione totalmente scorretta può condurre
a risultati totalmente fuorvianti.
Dopo aver formulato un’ipotesi sul primo momento delle variabili {ε i },
occorre formulare un’ipotesi anche sul loro momento secondo. L’ipotesi
generale, detta di eteroschedasticità, prevede che ogni variabile abbia una
propria varianza, che comunque si assume essere finita, ossia
Var (ε i ) = σ i2 < ∞ ;
molto spesso è possibile ipotizzare il caso di
omoschedasticità, ossia di uguaglianza fra le varianze, precisamente:
σ i2 = σ 2 per ogni i.
È importante anche fare ipotesi sulla dipendenza, o meno, fra le variabili
{ε i }; l’ipotesi più semplice è quella di non correlazione, ossia:
8
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
Cov(ε i , ε j ) = 0
∀i ≠ j .
Se l’ipotesi di non correlazione non è plausibile con i dati osservati, allora è
necessario formulare altre ipotesi, ad esempio si potrebbe pensare che le
variabili {ε i } siano un processo autoregressivo del primo ordine, per cui
considerando u n un processo stocastico white noise, con media nulla e
varianza σ u2 , si suppone:
ε i = ρε i −1 + u i .
Oltre ad ipotesi relative ai momenti, è possibile fare ipotesi sull’intera
distribuzione delle variabili casuali {ε i }; l’ipotesi formulata più spesso è
quella secondo la quale si distribuiscono normalmente, ma in generale è
possibile pensare che si distribuiscano come una normale di ordine p, la cui
densità è:
ε p
exp−
f (ε ) =
p
1
1
pσ p
p
2 p Γ1 + σ p
p
1
dove la funzione Γ è la funzione di Eulero e σ pp è lo scarto potenziato di
ordine p, ossia:
+∞
σ pp = ∫ ε
−∞
p
f (ε )dε .
A tale famiglia di distribuzioni appartengono diverse distribuzioni notevoli,
infatti:
- per p=1 si ha la distribuzione esponenziale doppia, detta anche
Laplace;
- per p=2, si ottiene la curva normale;
- per p → ∞ si ottiene una distribuzione uniforme.
Le distribuzioni appartenenti a tale famiglia sono tutte simmetriche; inoltre
la curtosi dipende dal parametro p, infatti:
9
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
- con un valore di p: 1<p<2 si hanno curve leptocurtiche;
- per p=2 (cioè la distribuzione Normale) si ottiene una curva
mesocurtica;
- per p>2 si hanno curve platicurtiche.
La scelta di una distribuzione diversa dalla Normale, ad esempio una
normale di ordine p, complica notevolmente gli algoritmi di stima,
soprattutto se la distribuzione considerata ha una forma funzionale piuttosto
complessa, ma ciò è dovuto al fatto che non sempre è possibile ipotizzare
che gli errori si distribuiscono normalmente.
Solitamente le osservazioni xi sono considerate come determinazioni di
variabili casuali, ma è possibile che anche tali valori siano considerati come
variabili casuali, per cui è necessario specificare la relazione esistente fra
tali osservazioni e gli errori {ε i }.
L’ipotesi più semplice prevede che le osservazioni e gli errori siano
incorrelati, per cui Cov(X i , ε i ) = 0 per ogni valore i. Talvolta però non è
lecito formulare tale ipotesi e quindi occorre specificare una particolare
dipendenza.
Nel caso di spazio multidimensionale delle variabili esplicative, la
specificazione del modello oltre la forma funzionale f, richiede anche
l’inclusione delle variabili che effettivamente influenzano la variabile
risposta y. Usualmente si sceglie un insieme molto ampio di variabili e
successivamente si seleziona un sottoinsieme di queste, sulla base di
particolari algoritmi. L’inclusione di variabili irrilevanti comporta un
aumento della varianza degli stimatori, mentre l’omissione di variabili
rilevanti determina la distorsione del modello; purtroppo la vera relazione
non è nota, per cui non si conoscono le variabili esplicative che
effettivamente influenzano y.
10
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
Gli algoritmi che consentono di selezionare un sottoinsieme “significativo”
di variabili esplicative sono essenzialmente di due tipi: forward selection e
backward elimination.
Nel primo tipo di algoritmo si parte da un modello con una sola variabile
esplicativa, che è quella che influenza maggiormente la y, e in ogni passo si
aggiunge nel modello la variabile il cui inserimento produce il maggiore
miglioramento del modello e si procede fin quando non si raggiunge un
livello di adattamento minimo prefissato.
Gli algoritmi di backward elimination operano nel senso opposto: si parte
dal modello con tutte le variabili esplicative presenti e in ogni passo si
elimina la variabile la cui eliminazione produce il minore peggioramento di
adattamento e si procede all’eliminazione fin quando non si raggiunge un
livello di adattamento minimo prefissato.
Esistono poi algoritmi di tipo stepwise, che combinano i due algoritmi
precedenti, allo scopo di ricercare una soluzione sub-ottimale.
L’adattamento ai dati è espresso per mezzo di una funzione obiettivo
specificata, che misura la distanza fra dati osservati e dati previsti. Si
discuterà di tale funzione in seguito, nell’ambito dei metodi di stima.
Un altro grosso problema inerente le variabili esplicative è quello che va
sotto il nome di multicollinearità, ossia la presenza di variabili esplicative
altamente correlate fra loro. La conseguenza maggiore di tale situazione è
che gli stimatori dei parametri hanno varianze elevate, per cui piccole
variazioni nei dati osservati possono produrre forti variazioni nelle stime
dei parametri.
Una possibile soluzione per ovviare a tale problema è quella di eliminare le
variabili maggiormente coinvolte in questo fenomeno: essendo altamente
correlate ad altre variabili, l’informazione che esse aggiungono al modello
è molto bassa, per cui è logico eliminarle dal modello.
11
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
Un’altra soluzione è quella di considerare le componenti principali
associate a tali variabili, in modo da conservare tutta l’informazione
disponibile, ma avere variabili a due a due incorrelate.
Si ricorda che se X è il generico vettore delle variabili esplicative, bisogna
prima standardizzare tale vettore, per cui si considera il nuovo vettore
Z=
X − E( X )
Var ( X )
, quindi si procede alla trasformazione C = Γ t Z , dove Γ è la
matrice degli autovettori associata alla matrice di correlazione e C è il
vettore delle componenti principali, ossia variabili a due a due incorrelate
che contengono tutta la variabilità presente in X, in modo decrescente.
Precisamente, se C j è la j-esima componente principale, allora risulta
Var (C j ) = λ j , dove λ j è il j-esimo autovalore associato alla matrice di
correlazione, ed inoltre:
∑ Var (Z ) = ∑ Var (C ) .
j
j
j
j
Quindi, dalle osservazioni {X i }in=1 si passa alle componenti principali {C i }in=1
e quindi si considera la relazione y = f (C;θ ) + ε .
L’adozione
delle
componenti
principali
comporta
una
difficoltà
interpretativa dei nuovi parametri, dovuta alla trasformazione delle variabili
effettuata.
2.1
Metodi di stima
Dato un vettore d-dimensionale di variabili esplicative x = ( x1 , x 2 , , xd ) t una
variabile casuale continua y, detta variabile risposta, si ha la seguente
relazione:
12
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
y = f (x ) + ε
Lo scopo dell'analista è quello di stimare la funzione f, sulla base di un
insieme finito di n osservazioni: {( x 1 , y1 ), ( x 2 , y 2 ), , ( x n , y n )} , dove la coppia
( x t , y t ) rappresenta il valore osservato del vettore x e della variabile y al
tempo t. Nell’approccio parametrico la forma funzionale f è definita a priori
ed è completamente specificata da un vettore di parametri, indicato con θ ,
per tal motivo si preferisce rappresentare la relazione nel seguente modo:
y = f (x;θ ) + ε
Il vettore θ = (θ 1 ,θ 2 , ,θ k )t contiene tutti parametri da stimare, sulla base di
un campione di dati.
Al fine di stimare i parametri del modello, si considera una funzione di
perdita Ψ da minimizzare; per cui, posto θ l'insieme di tutti i parametri del
modello, si ha che lo stimatore θˆ è quel vettore che minimizza la funzione
obiettivo:
E (θ ) =
1 n
⋅ ∑ Ψ[y t , f (x t ;θ )]
n t =1
La funzione di perdita più usata è quella che definisce il metodo dei minimi
quadrati ordinari, precisamente:
Ψ ( y t , f (x t ; θ )) = ( y t − f (x t ;θ )) .
2
È possibile considerare altre funzioni di perdita; una funzione usata spesso,
perché poco sensibile agli outliers è:
Ψ ( y t , f (x t ; θ )) = y t − f (x t ; θ ) .
Più in generale è possibile considerare una classe di stimatori denominati di
norma L p , in cui la funzione di perdita è definita come:
Ψ ( y t , f (x t ;θ )) = y t − f (x t ;θ )
p
.
13
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
Per p=1 e p=2 si ottengono le due funzioni di perdita considerate in
precedenza, per cui lo stimatore di norma L2 e lo stimatori dei minimi
quadrati ordinari coincidono.
I metodi descritti in precedenza danno luogo a stimatori efficienti sotto
l’ipotesi che gli errori {ε t } siano un processo white noise, per cui abbiano
media nulla, siano omoschedastici e non correlati.
Se si è in presenza di errori eteroschedastici, si preferisce impiegare il
metodo dei minimi quadrati ponderati, dove le varie componenti, che
sommate danno luogo alla funzione obiettivo dei minimi quadrati, vengono
pesate da particolari fattori, che tengono conto della diversa varianza.
Si ipotizzi ad esempio un modello di regressione lineare semplice
y t = a + bxt + ε t con errori eteroschedastici e con varianze dipendenti dalle
osservazioni xt , cioè, ad esempio:
Var (ε t ) = σ t2 = σ 2 x t2 .
Considerando il nuovo modello:
ε
yt
1
=a +b+ t
xt
xt
xt
ε
xt
esso presenta errori t omoschedastici e quindi si applica il metodo dei
1
,
x t
minimi quadrati ponderati, dove in questo caso i pesi sono pari a
per cui la funzione da minimizzare è:
n
E (a, b ) = ∑
t =1
1
xt
(yt
− a − bxt ) .
2
Più in generale, in caso di errori con matrice di varianze e covarianze V
qualsiasi, per cui non diagonale, ossia con errori correlati si preferisce il
14
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
metodo dei minimi quadrati generalizzati, nel quale lo stimatore θˆ è quel
vettore che minimizza la funzione:
(
)
(
)
E (θ ) = y − f (x;θ ) V −1 y − f (x;θ ) .
t
Dove il vettore y è il vettore delle n osservazioni per la variabile risposta,
ossia è dato da y = ( y1 , y2 , , yn )t ed il vettore f (x;θ ) è il vettore dei valori
attesi
di
y
f (x;θ ) = ( f (x 1 ;θ ),
per
le
n
osservazioni,
ossia
è
dato
da
, f (x n ;θ )) .
t
Un metodo di stima che in particolari ipotesi conduce a stimatori
coincidenti con quelli dei minimi quadrati è quello della massima
verosimiglianza.
Tale metodo presuppone la conoscenza della distribuzione di probabilità
del vettore aleatorio y. Se p (y;θ ) è la distribuzione congiunta del campione,
che dipende dalla distribuzione degli errori {ε t }, lo stimatore di massima
verosimiglianza θˆ
del vettore parametrico θ
è quel valore in
corrispondenza del quale la distribuzione p (y;θ ) è massima.
Se la distribuzione p (y;θ ) è regolare, allora θˆ è il punto di massimo e si
ottiene attraverso un problema di massimizzazione, per cui è quel valore
che soddisfa le equazioni:
( )
∂p y; θ
∂θ
=0
e in corrispondenza del quale la matrice Hessiana è semidefinita negativa.
Molto spesso la forma funzionale di p (y;θ ) è abbastanza complessa, altre
volte non è possibile ricavarla e in questi casi non è quindi possibile
applicare il metodo.
I vantaggi dell’uso del metodo della massima verosimiglianza scaturiscono
dalle proprietà teoriche che tale metodo possiede.
15
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
Sotto condizioni di regolarità, lo stimatore di massima verosimiglianza θˆ è
consistente ed asintoticamente normale, con media pari al parametro θ e
varianza pari al limite inferiore di Rao-Cramer, che è la varianza più bassa
che
uno
stimatore
non
distorto
possa
avere,
pari
all’inverso
dell’informazione attesa di Fisher I (θ ) . Per cui:
p
θˆ
→
θ
e
1
d
.
N θ ,
θˆ →
I (θ )
Inoltre, se esiste uno stimatore non distorto e pienamente efficiente, la cui
varianza è pari, cioè, al limite inferiore di Rao-Cramer, allora tale stimatore
coincide con quello di massima verosimiglianza.
Lo stimatore di massima verosimiglianza è inoltre funzione delle statistiche
sufficienti minimali, per cui sfrutta tutta l’informazione presente nel
campione in merito ai parametri da stimare e gode della proprietà di
invarianza rispetto a trasformazioni monotone, ossia se θˆ è lo stimatore di
massima verosimiglianza del parametro θ e se γ è una funzione monotona
definita sullo spazio parametrico, allora γ (θˆ ) sarà lo stimatore di massima
verosimiglianza del parametro γ (θ ) .
Per minimizzare le funzioni obiettivo E (θ ) , oppure per massimizzare
( )
p y;θ , è necessario utilizzare algoritmi di ottimizzazione iterativi, poiché
non esiste una soluzione in forma chiusa per gli stimatori, tranne nei casi
più semplici, come ad esempio nei modelli lineari.
Per evitare che il modello stimato fˆ (x ) si adatti perfettamente ai dati
osservati e quindi abbia una scarsa capacità di generalizzazione ad altri
dati, si utilizzano varie tecniche.
16
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
Una tecnica, usata in presenza di grandi campioni, è quella di suddividere
(casualmente) il campione in 2 sottoinsiemi; un sottoinsieme, definito
campione di addestramento (learning set), viene utilizzato per stimare i
parametri del modello ed un altro sottoinsieme, detto campione di verifica
o test (test set), consente di misurare la capacità di generalizzazione del
modello.
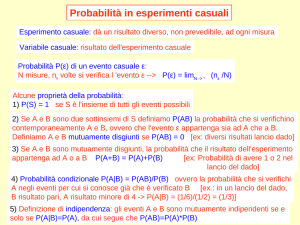
In pratica, ad ogni passo dell'algoritmo di ottimizzazione, si misura l'errore
del modello, ossia E (θˆ ), in entrambi i sottoinsiemi. L'errore calcolato sul
learning set tenderà a decrescere e sarà uguale a zero, nel caso di perfetto
adattamento ai dati osservati (che però implica una scarsa capacità di
generalizzazione), mentre l'errore calcolato sul test set seguirà un
andamento parabolico, ossia all'inizio tenderà a decrescere e poi, raggiunto
un minimo, inizierà ad aumentare, ciò significa che il modello inizia a
seguire eccessivamente la dinamica dei dati osservati, per cui si considera
come stima dei parametri del modello, il valore assunto dai parametri nel
passo in cui l'errore sul test set aveva raggiunto il minimo. Tale tecnica è
nota in letteratura col nome di Early stopping.
Fig. 1: Early stopping
17
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
Tale approccio è impraticabile in presenza di piccoli campioni; ad ogni
modo, si possono adottare tecniche di tipo cross validation.
Un altro approccio aggiunge alla funzione di errore un termine di
penalizzazione Ω , per evitare che la funzione abbia troppi salti, in modo da
adattarsi ai dati osservati; per cui si considera un nuovo funzionale
~
E (θ ) = E (θ ) + λ ⋅ Ω , da minimizzare.
λ è un parametro reale positivo, che attribuisce minore o maggiore
importanza al termine di penalizzazione, quindi è fondamentale il valore
che gli viene attribuito.
d
Un termine di penalizzazione molto usato è: Ω = ∫ ∑
i =1
∂ 2 f (x )
dx.
∂xi2
Tali approcci hanno lo scopo di raggiungere un compromesso fra bias e
varianza degli stimatori, in modo tale da poter generalizzare il modello, nel
caso in cui si considerano valori dei predittori diversi da quelli osservati e
si vuole quindi fare previsione.
2.2
Verifica del modello
Successivamente alla fase di stima del modello, occorre verificare che il
modello adattato fornisca risultati soddisfacenti. Per verificare la bontà del
modello si procede sia con specifici test sui parametri, sia con l’analisi
complessiva del modello e quindi con l’analisi dei residui. In tale fase oltre
a decidere se accettare o rifiutare il modello stimato, si ottengono
informazioni aggiuntive riguardo il modello stesso.
Il primo passo da compiere è quello di verificare la significatività dei
parametri presenti nel modello mediante opportuni test statistici, in modo
18
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
da eliminare quei parametri che non sono significativi e che comportano
una ridondanza del modello.
Successivamente vengono effettuati diversi test per verificare la plausibilità
delle ipotesi fatte a priori. A tal riguardo si testa l’ipotesi di
omoschedasticità degli errori, l’ipotesi di errori non autocorrelati e l’ipotesi
di normalità degli stessi.
Per ogni tipo di ipotesi esistono in letteratura diversi test attraverso i quali
se ne saggia la plausibilità. Le distribuzioni probabilistiche delle statistiche
test impiegate dipendono, ovviamente, dalla distribuzione p (y;θ ) del
campione. Se si assume di conoscere la distribuzione degli errori e quindi
del campione, allora è possibile impiegare il test ottenuto mediante il
rapporto delle verosimiglianze, dato che è possibile determinare lo
stimatore di massima verosimiglianza. Come è noto, tale test ha una
distribuzione asintotica di tipo χ 2 , in casi particolari (come nei modelli
lineari) è possibile conoscere le distribuzioni esatte di tali statistiche test,
anche nel caso di campioni di piccole dimensioni. Qualora si rifiuti una
particolare ipotesi, è necessario intervenire sul modello o direttamente sul
metodo di stima; ad esempio, rifiutando l’ipotesi che gli errori siano
omoschedastici è necessario intervenire cambiando l’algoritmo di stima,
infatti si passerà dal metodo dei minimi quadrati ordinari al metodo dei
minimi quadrati ponderati.
I residui di un modello, definiti come la differenza fra valori osservati e
valori previsti, ossia rt = y t − f (x t ;θˆ ), rappresentano un grosso strumento a
supporto della verifica di un modello.
Dall’analisi dei residui rt del modello stimato, è possibile trarre conclusioni
sulla bontà del modello stimato e delle ipotesi fatte.
19
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
Ad esempio, rappresentando in un asse cartesiano i punti (rt −1 , rt ) è possibile
verificare l’eventuale presenza di errori autocorrelati. Qualora i punti si
dispongano in modo casuale, ossia siano sparsi nella rappresentazione
cartesiana, si può affermare che gli errori siano non correlati.
Rappresentando, invece, i punti (xt , rt 2 ) è possibile avere un’idea riguardo la
struttura di variabilità degli errori; se tali punti non si dispongono intorno
una curva ben precisa, è lecito assumere che gli errori siano
omoschedastici, se invece tale nube di punti assume una forma ben
delineata, allora si deduce che gli errori hanno una varianza che varia in
funzione dei valori
xt
e quindi bisogna considerare l’ipotesi di
eteroschedasticità.
2.3
Utilizzo del modello
Una volta che il modello stimato ha fornito risultati soddisfacenti, è
possibile utilizzarlo per diversi scopi:
- previsione di valori futuri;
- interpretazione delle relazioni fra variabili;
- simulazione di particolari scenari, sotto particolari ipotesi.
Se il modello considerato è del tipo y t = f (x t ;θ ) + ε t con E (ε t ) = 0 , allora il
valore f (x t ;θˆ ) è il valore “calcolato” dal modello per y t , sotto tali ipotesi,
per cui è possibile prevedere valori futuri di tale variabile sfruttando la
relazione che lega y ed x, ossia la funzione f, cioè al tempo (t+1) il valore
previsto per y è dato da f (x t +1 ;θˆ ).
Un aspetto simile alla previsione è quello della simulazione: ipotizzando
particolari valori delle variabili esplicative x si vuole vedere che valore
20
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
assumerebbe la variabile y in tale situazione. In questo modo è possibile,
dunque, simulare particolari scenari.
Formalmente, se x 0 è una particolare determinazione del vettore
esplicativo x, in tale situazione si prevede che la variabile risposta assuma il
valore y 0 , definito come:
(
)
y 0 = f x 0 ;θˆ .
E’ chiaro che la bontà della previsione, dipende dalla bontà del modello; si
tenga presente, inoltre, che un modello è valido in un determinato arco
temporale (e spaziale), ossia sarà valido per un certo periodo di tempo, ma
non lo sarà più in un periodo successivo; è presente, cioè, un problema di
instabilità temporale, ciò implica che anche un modello valido può dar
luogo a previsioni totalmente errate, se si pretende di prevedere un
fenomeno dopo un lag temporale abbastanza elevato.
3.
Approccio non parametrico
Dato un campione di osservazioni {(xi , y i )}in=1 , la sottostante relazione fra
variabili è del tipo y i = m(xi ) + ε i . L’obiettivo dell’analista è quello di
stimare la funzione m a partire dal campione osservato, in modo da poter
conoscere la relazione che lega x ed y, sia per scopi descrittivi che per scopi
previsivi.
Se per un punto fissato x ci sono osservazioni ripetute, allora la stima di
m(x) può essere fatta usando semplicemente la media dei valori y
corrispondenti. Purtroppo, nella maggior parte dei casi pratici tale
situazione non si presenta, per cui la stima deve essere fatta seguendo altre
procedure.
21
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
In generale, vengono considerate procedure di media locale, ossia si stima
m(x) attraverso una media aritmetica ponderata delle osservazioni y
corrispondenti ai valori xi appartenenti ad un certo intorno del punto x di
riferimento. Per cui, considerando il punto x, il valore che la funzione m
assume in corrispondenza di tale punto viene stimata nel seguente modo:
n
mˆ (x ) = n −1 ∑ Wni ( x) y i
i =1
dove l’insieme {Wni ( x)}in=1 denota una sequenza di pesi che può dipendere
dall’intero vettore {X i }in=1 .
Lo stimatore mˆ ( x) è usualmente denominato smoother, mentre la procedura
di stima è chiamata smooth.
Nello stimatore mˆ ( x) un ruolo chiave è giocato dal sistema di pesi
{Wni ( x)}in=1 ; i valori di tale sequenza regolano l’ampiezza dell’intorno di x
impiegato per calcolare la media ponderata locale delle y. Una media locale
su un intorno troppo largo determina uno stimatore m̂ con bassa varianza,
ma distorto; dall’altra parte, una media locale calcolata su un intorno
troppo piccolo implica la presenza di uno stimatore corretto, ma con alta
variabilità.. Pertanto, si rende necessario un compromesso che bilanci il
trade-off fra i due casi.
Se si suppone che i pesi {Wni ( x)}in=1 siano positivi e che, per ogni x, la loro
somma soddisfi la relazione:
n
n −1 ∑ Wni ( x) = 1
i =1
allora mˆ ( x) è la soluzione del metodo di stima dei minimi quadrati al punto
x, se è la soluzione del seguente problema di minimizzazione:
n
2
min n −1 ∑ Wni ( x)( y i − θ ) 2 = min n −1 ∑ Wni ( x)( y i − mˆ ( x) ) .
θ
i =1
22
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
3.1
Principali tecniche non parametriche
Una tecnica non parametrica molto nota in letteratura è quella che va sotto
il nome di Kernel smoothing. Tale procedura descrive i pesi Wni (x) per
mezzo di una funzione di densità con un parametro di scala che aggiusta la
forma e la grandezza dei pesi in un intorno di x. Tale funzione, detta kernel
e indicata con K, deve essere continua e simmetrica e soddisfare
l’uguaglianza ∫ K (u )du = 1 .
Nel caso in cui lo spazio dei predittori sia unidimensionale, si definiscono i
pesi nel seguente modo:
Wni ( x) = K hn (x − X i ) / fˆhn ( x)
n
dove fˆh ( x) = n −1 ∑ K h (x − X i ) e K h (u ) è il kernel con fattore di scala hn ,
n
i =1
u
hn
con K h (u ) = hn−1 K
n
n
n
.
Eliminando la dipendenza di hn dall’ampiezza campionaria n, per cui
hn = h , i pesi Wni (x) definiti in precedenza, sono indicati con {Whi ( x)}i =1 per
n
indicarne la dipendenza da h, la funzione fˆh è lo stimatore kernel di
Rosenblatt-Parzen della densità marginale di X.
Definiti i pesi {Whi ( x)}in=1 si ottiene lo stimatore, detto di Nadaraya-Watson:
n
mˆ h ( x) =
n −1 ∑ K h (x − X i )Yi
n
i =1
n
−1
∑ K (x − X )
i =1
h
.
i
È possibile definire diverse funzioni kernel, ma considerazioni pratiche e
teoriche limitano la scelta. Per esempio, funzioni kernel che assumono
23
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
valori molto piccoli possono causare con un computer problemi
computazionali.
Una funzione comunemente usata, date le sue ottime proprietà, è la
cosiddetta funzione kernel di Epanechnikov, ossia:
K (u ) = 0,75(1 − u 2 )⋅ I ( u ≤ 1)
dove la funzione I ( u ≤ 1) vale:
1 se u ≤ 1
I ( u ≤ 1) =
0 altrimenti
Si noti che tale funzione kernel non è differenziabile per u = ±1 e per
fˆh ( x) = 0 lo smoother di tipo kernel non è definito, essendo un caso del tipo
“0/0”; in tale situazione si pone mˆ h ( x) = 0 .
Un'altra funzione kernel molto utilizzata è quella di tipo gaussiano, ossia:
K (u ) = (2π )
−
Nel
1
2
u2
exp− .
2
caso
X i = (X i1 , X i 2 ,
di
spazio
multidimensionale
dei
predittori,
ossia
, X id ) , si usa una funzione kernel multidimensionale pari al
prodotto delle singole funzioni kernel unidimensionali, ossia:
K (u1 ,
u d ) = ∏ K (u j ).
d
j =1
I pesi per lo smoother di tipo kernel sono quindi definiti come:
∏ K (x
d
Whi ( x) =
j =1
h
j
− X ij )
fˆh ( x )
.
In alcuni casi la densità f(x) è nota, per cui in tali situazioni i pesi sono
definiti nel seguente modo:
Whi(1) ( x) = K h (x − X i ) / f ( x) .
Lo smoother di tipo kernel è, sotto condizioni di regolarità, uno stimatore
consistente della funzione di regressione m.
24
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
Un'altra tecnica parametrica molto diffusa va sotto il nome “k-nearest
neighbor”, ossia k valori più prossimi.
Mentre la stima di tipo kernel è definita mediante una media ponderata
della variabile risposta su un intorno fissato del punto x, determinato dalla
funzione K e dalla “finestra” h, il metodo k-nearest neighbor, indicato per
semplicità con (k-NN), stima la funzione di regressione attraverso una
media ponderata in un intorno variabile: tale intorno è definito attraverso i
k punti più prossimi al valore x, considerando la distanza di tipo Euclideo.
Lo stimatore k-NN è definito nel seguente modo:
n
mˆ k ( x) = n −1 ∑ W ki ( x ) ⋅ Yi
i =1
dove {Wki ( x)}in=1 è la sequenza di pesi definita attraverso l’insieme di indici:
J x = {i : X i è una delle k osservazioni più prossime a x}.
Più precisamente, i pesi sono definiti come:
1
Wki ( x) = k
0
se
i∈Jx
altrimenti
Il parametro k regola il grado di “lisciamento” della curva stimata; esso
gioca un ruolo simile alla finestra h dello stimatore di tipo kernel: valori
elevati di k determinano uno stimatore distorto con bassa varianza,
viceversa valori bassi di k conducono a uno stimatore corretto ma
altamente variabile; quindi, anche in questo caso, è necessario cercare un
compromesso fra le due situazioni, per cui bisogna scegliere un valore k in
modo da avere uno stimatore con bassa distorsione e bassa varianza.
Nel caso limite che k=n, ossia se si considerano tutte le osservazioni
campionarie, lo stimatore k-NN è pari alla media aritmetica delle y.
Esiste anche un altro tipo di stimatori k-NN, detti stimatori dei punti più
prossimi simmetrizzati. In tal caso i punti più prossimi sono definiti in
25
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
termini di distanza basata sulla distribuzione empirica dei dati osservati
{X i }in=1 , indicata con
Fn ( X i ) . Se h è una “finestra” tendente a zero, lo
stimatore in questione è:
n
F ( X ) − Fn (x )
−1
mˆ k ( h ) = (nh ) ∑ K n i
⋅ Yi .
h
i =1
La scelta di h implica il solito trade-off tra stimatori corretti ma con alta
varianza e stimatori distorti con bassa varianza.
Una tecnica diffusissima è quella denominata Spline smoothing. Attraverso
tale tecnica si cerca una funzione g ( X i ) che approssima i valori Yi ; per
determinare una funzione g che si adatti bene ai dati, si minimizza
n
l’espressione
∑ (Y
i =1
i
− g (X i )) , per evitare che la funzione trovata si adatti
2
perfettamente ai dati osservati e quindi non sia generalizzabile, allora si
aggiunge un termine di penalizzazione regolato da un parametro λ , per cui
la funzione g sarà quella che minimizzerà l’espressione
S λ (g ) ,
precisamente:
n
S λ ( g ) = ∑ (Yi − g (X i )) + λ ⋅ ∫ (g ' ' ( x) ) dx .
2
2
i =1
Il problema di minimizzazione sulla classe delle funzione differenziabili
del secondo ordine su un intervallo [a,b]= [ X (1) , X ( n ) ] ha un’unica soluzione
mˆ λ ( x) che è definita cubic spline: mˆ λ ( x) è un polinomio di terzo grado
definito fra due valori successivi della X. Variando il termine di
penalizzazione, si ottengono polinomi locali di diverso grado.
Lo stimatore mˆ λ ( x) può essere espresso anche nella forma:
n
mˆ λ ( x) = n −1 ∑ Wλi ( x ) ⋅ Yi .
i =1
La forma funzionale dei pesi {Wλi (x)} è però difficile da esplicitare.
26
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
Esistono anche tecniche ricorsive non parametriche, caratterizzate dalla
presenza
di
coppie
di
osservazioni
(X 1 , Y1 ), (X 2 , Y2 ),
disponibili
sequenzialmente, come nel caso di serie storiche.
Con tali tecniche, si aggiorna lo stimatore per ogni nuova coppia di
osservazioni, infatti si ha:
mˆ n +1 ( x) = mˆ n ( x) + n −1 ⋅ K hn +1 (x − X n +1 ) ⋅ (Yn +1 − mˆ n ( x) ) .
Nella precedente espressione mˆ 0 = 0 e K h è una sequenza di kernel.
Revesz dimostrò che tale stimatore ha una distribuzione asintotica di tipo
normale.
Una tecnica non parametrica molto semplice è quella che prende il nome di
regressogram, nella quale la funzione m viene stimata per mezzo di una
media dei valori y associati ai valori X i appartenenti ad una determinata
classe definita a priori. Tale tecnica rappresenta un caso particolare della
stima di tipo kernel, nel caso in cui la funzione kernel sia uniforme.
Un’altra classe di stimatori non parametrici sono gli stimatori CS
(convolution smoothing), indicati con mˆ CS ( x) e definiti come:
mˆ CS ( x) = ∫ G n (t ) ⋅ K h ( x − t )dt
dove la funzione G n (t ) è l’interpolazione lineare dei dati osservati
{(X i , Yi )}in=1 e
K h è una sequenza di kernel.
È possibile esprimere tale stimatore anche come media ponderata, infatti:
n
( CS )
mˆ CS ( x) = n −1 ∑ Wni ( x)Yi
i =1
dove
Wni( CS ) ( x) = ∫ v i (t ) ⋅ K h ( x − t )dt
e vi (t ) è l’interpolazione lineare dei punti {(X j , δ ij )}nj =1 , dove δ ij è il simbolo
di Kronecker.
27
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
Se l’obiettivo è studiare la mediana di Y condizionatamente a X, invece che
la media condizionata, allora una sequenza di “mediane locali” della
variabile di risposta definisce lo stimatore detto mediana smoother. Tale
stimatore, che gode della proprietà di robustezza, è definito come:
mˆ ( x) = med {Yi : i ∈ J x }
dove J x è l’insieme definito in precedenza riguardo lo stimatore k-NN.
Schmerling e Peil proposero di stimare la distribuzione congiunta ignota di
(X,Y), ossia f(x,y) e quindi stimare m(x) con la formula standard della
tecnica di tipo kernel.
In particolare, la stima della densità che proposero è:
n
fˆ ( x, y ) = n −1 ∑ f XY ( x, y; X i , Yi ) ,
i =1
dove f XY ( x, y; X i , Yi ) sono densità note. La valutazione del valore atteso
condizionato sulla base di questa stima è una curva che chiamarono curva
di regressione empirica. Le scelte per f XY ( x, y; X i , Yi ) sono diverse; se per
esempio si considera:
f XY ( x, y; X i , Yi ) = K h ( x − X i ) K h ( y − Yi )
allora lo stimatore che ne deriva è:
n
mˆ h ( x) =
∑K
i =1
n
∑K
i =1
( x − X i )Yi
h
h
(x − X i )
che è lo stimatore di Nadaraya-Watson.
Si può anche considerare una distribuzione bidimensionale gaussiana.
28
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
3.2
Criteri di selezione della “finestra” h
Come si è osservato nella sezione precedente, la scelta dell’ampiezza h che
definisce l’intervallo del punto x le cui osservazioni y associate vengono
utilizzate per calcolare la media ponderata locale, che stima m(x), è di
basilare importanza: una finestra troppo elevata determina uno scarso
adattamento ai dati, per cui si ottiene uno stimatore distorto sebbene con
varianza bassa, dall’altra parte però, una finestra troppo piccola implica un
perfetto adattamento ai dati e quindi si ha uno stimatore corretto, ma con
un’elevata varianza. È necessario dunque trovare un valore della finestra h
che consenta di raggiungere un compromesso fra le due situazioni, in modo
da avere uno stimatore che si adatti bene ai dati, ma che presenti una
varianza non elevata, in modo da poter generalizzare i risultati ottenuti in
virtù del campione osservato e quindi poter fare previsione, oppure
estrapolare informazioni al di fuori del range di osservazione esaminato.
Al fine di selezionare un valore h che dia luogo ad un modello
generalizzabile esistono diverse procedure automatiche, che determinano il
valore h che ottimizza una qualche funzione obiettivo.
Una prima tecnica di tal natura è quella che va sotto il nome di cross
validation: si procede stimando m h (x) n volte, eliminando dal campione a
turno un’osservazione. Indicato con mˆ h, j ( X j ) lo stimatore ottenuto
considerando il campione privo della j-esima osservazione, ossia:
mˆ h, j ( X j ) = n −1 ∑ Whi ( X i )Yi
i≠ j
si considera la funzione CV, detta di cross validation:
n
[
]
CV (h) = n −1 ∑ Y j − mˆ h , j ( X j ) w( X j ) .
j =1
2
29
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
Il valore h selezionato sarà quello che minimizzerà la funzione CV, in
quanto essa indica l’abilità di predire Y j impiegando il campione privo
della j-esima unità X j .
Una procedura alternativa alla cross validation è quella che introduce una
funzione di penalizzazione, per evitare un eccessivo adattamento ai dati.
4.
Approccio semiparametrico
Molto spesso, per sfruttare i vantaggi sia dell’approccio parametrico che di
quello non parametrico, si considerano modelli che sono parzialmente
specificati e che sono detti semiparametrici.
Un modello semiparametrico è del tipo:
y = f ( z ; θ ) + m( x ) + ε
dove sia z che x sono variabili esplicative e θ è l’insieme di parametri da
cui dipende la funzione f, che viene completamente specificata.
Nell’equazione precedente, si nota che la parte deterministica del modello è
formata da due componenti:
1. f ( z;θ ) è la parte parametrica del modello, in quanto la funzione f è
specificata a priori e dipende da un certo insieme di parametri θ ;
2. m(x) è la parte non parametrica del modello, che verrà stimata con
una delle tecniche non parametriche descritte in precedenza.
30
Antonio Manno ([email protected], www.statistica.too.it), Palermo, Italia
Bibliografia
- Davidian M., Giltinan D.M, Nonlinear Models for Repeated
Measurement Data. Chapman & Hall
- Ryan T. P., Modern Regression Methods, Wiley
- Granger C.W., Terasvirta T. (1992), Modelling nonlinear economic
relationships. Oxford University Press
- Simonoff J.S. Smoothing Methods in Statistics. Springer
- Bowman, Azzalini Applied smoothing techniques for data analysis.
Oxford Science Publications
- Hart P.E., Non parametric smoothing and lack of fit. Springer
- Green P.J., Silverman B.W. (1994), Non parametric regression and
generalized linear models. Chapman & Hall
- Stone C.J. (1977), Consistent nonparametric regression. The Annals of
Statistics, Vol.5, No.4, 595-645
- Silverman B.W.(1985), Some Aspects of the Spline Smoothing Approach
to Non-parametric Regression Curve Fitting. Royal Statistical Society B
47, No. 1, 1-52
- Hardle W. (1989), Applied nonparametric regression. Cambridge
University Press
- Bishop C.M. (1995), Neural Networks for Pattern Recognition.
Clarendon Press, Oxford.
- Ripley B.D. (1996), Pattern Recognition and Neural Networks.
Cambridge, University Press.
- Johnston J. (1996), Econometrica. Franco Angeli
- Piccolo D. (1994), Introduzione all’analisi delle serie storiche. La
Nuova Italia Scientifica.
31