Corso di Fondamenti di Telecomunicazioni
6 – Processi aleatori
Prof Giovanni Schembra
Prof.
1
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Struttura della lezione
Definizioni di processi aleatori e caratterizzazione
statistica (Æ)
Processi aleatori stazionari (Æ)
Potenza, energia e Spettro di potenza (Æ)
Processi aleatori ergodici (Æ)
Processi aleatori notevoli (Æ)
Stima delle statistiche di primo e secondo ordine
Processi gaussiani
Rumore bianco e rumore termico
Correlazione tra due processi aleatori (Æ)
Filtraggio di un segnale aleatorio con sistemi LTI (Æ)
2
1
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
PROCESSI ALEATORI:
DEFINIZIONE
E CARATTERIZZAZIONE STATISTICA
3
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Processi aleatori
Segnali aleatori:
Processi aleatori:
spesso dei segnali x(t) trattati, elaborati, o ricevuti non si
conosce a priori la forma d’onda nel tempo
un processo aleatorio è un modello matematico per i segnali
aleatori
Processo aleatorio: definizione
collezione di un numero finito o infinito di funzioni del tempo
(segnali determinati) corrispondenti a diversi risultati di un
esperimento aleatorio
4
2
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Processi aleatori
X(t,ω) è il processo aleatorio
x(t,ωi) funzione campione
X(ti ,ω) variabile aleatoria
x(tj,ωi) numero
L’aleatorietà sta nel fatto che a priori non è possibile sapere
quale sarà il segnale
Eseguito l’esperimento, il processo diventa a posteriori un
segnale determinato x(t, ωi), detto funzione campione o
realizzazione
5
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Processi aleatori parametrici
E
Esempio
i 1:
1 processo esponenziale
i l
ω1 = 1
−t
X (t ) = Ω e u (t )
processo parametrico dipendente
(parametro)) Ω
dalla v.a. (p
Ω è una v.a.
assume i valori del lancio di un dado
ω2 = 2
ω3 = 3
Ω = {ωi} = {1,2,..,6}
6
3
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Processi aleatori parametrici
E
Esempio
i 2:
2 generatore
t
di segnale
l cosinusoidale
i
id l
X (t ) = A cos (2πf 0 t + θ )
A : costante
f 0 : costante
θ : variabile aleatoria continua in [0,2π ]
I processi parametrici sono i processi più semplici da trattare
7
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
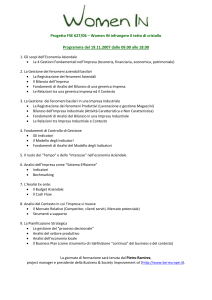
Caratterizzazione statistica di un processo
aleatorio
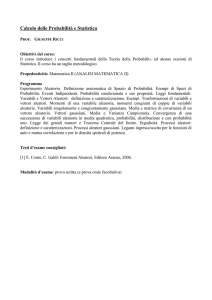
Statistiche del primo ordine
X (t1 , ω ) = X ( t1 )
variabile aleatoria
Funzione distribuzione di probabilità del primo ordine del
processo
FX ( x; t1 ) = Pr{X (t1 ) ≤ x}
Δ
dipende anche da una variabile temporale t1
perché le proprietà statistiche della variabile
aleatoria cambiano, in generale, al cambiare
dell’istante di tempo al quale si “campiona” il
processo:
FX ( x; t1 ) ≠ FX ( x ; t 2 )
4
x 1(t)
X(t 1 )
2
x 2(t)
0
x 3(t)
-2
x 4(t)
t1
-4
0
X(t1)
1
2
3
4
5
Tempo, t
8
4
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Caratterizzazione statistica di un processo
aleatorio
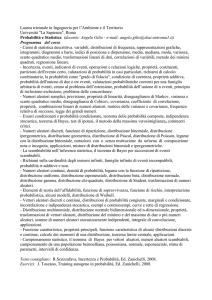
X (t1 , ω ) = X ( t1 )
Statistiche del primo ordine
Funzione densità di probabilità del primo ordine del
processo
Δ ∂F ( x ; t1 )
f X ( x; t1 ) = X
∂x
4
x 1(t)
X(t 1 )
2
x 2(t)
0
x 3(t)
-2
x 4(t)
t1
-4
0
X(t1)
1
2
3
4
5
Tempo, t
9
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Caratterizzazione statistica di un processo
aleatorio
Osserviamo che la funzione FX ( x;t1 ) non è sufficiente a
caratterizzare un processo aleatorio
Esempio:
un processo aleatorio utilizzato per modellare (e prevedere) la
quotazione di un titolo in borsa
X (t ) : probabilità dell’evento che la quotazione del titolo all’istante di
vendita t2 sia maggiore della quotazione all’istante di acquisto t1
F X ( x1 , x 2 ; t 1 , t 2 ) =
Δ
Pr{X (t1 ) ≤ x1 , X (t 2 ) ≤ x 2 }
richiede la considerazione congiunta
di due variabili aleatorie estratte dallo
stesso processo in istanti distinti.
Non può essere utilizzata FX ( x; t1 )
distribuzione di probabilità del secondo ordine del processo
10
5
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Caratterizzazione statistica completa di un
processo aleatorio
Funzione distribuzione di probabilità di ordine n:
FX ( x1 , x 2 ,..., x n ; t1 , t 2 ,..., t n ) = Pr{X (t1 ) ≤ x1 , X (t 2 ) ≤ x 2 ,..., X (t n ) ≤ x n }
Δ
Funzione densità di probabilità di ordine n:
Δ
f X ( x1 , x 2 ,..., x n ; t1 , t 2 ,..., t n ) =
∂ n FX ( x1 , x 2 ,..., x n ; t1 , t 2 ,..., t n )
∂x1∂x 2 ...∂x n
NOTA: La descrizione statistica completa di un processo stocastico si ha quando è
nota la funzione distribuzione di probabilità congiunta delle n v.a. X(t1), X(t2), X(tn)
per ∀n e ∀ n-upla (t1,t2,…,tn) [distribuzione di probab. di ordine n]
Praticamente impossibile!!!!!
Fondamenti di TLC - Prof. G. Schembra
parametri statistici semplificati
11
6 – Processi aleatori
Classificazione dei processi aleatori
processo
processo
processo
processo
discreto: a valori discreti
continuo: a valori continui
tempo-discreto: con t variabile discreta
tempo-continuo: con t variabile continua
12
6
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Esempio
Il segnale Dati binario è un processo a valori
discreti (valori 0 e 1) e tempo discreto.
Due possibili realizzazioni di un processo binario:
13
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Indici statistici del 1° ordine di un
processo aleatorio
Valore medio statistico η X (t )
Il valore di questa funzione a un istante assegnato t = t
è il valor medio della variabile aleatoria X (t ) , estratta
+∞
dal processo all’istante stesso:
η X (t ) = E {X (t )} = ∫ x f X ( x; t )dx
4
x3(t)
−∞
x1(t)
2
Per processi continui:
η X (t ) = E{X (t )} =
0
Δ
-2
+∞
∫xf
X
(x, t )dx
−∞
x4(t)
x2(t)
Per processi discreti
-4
0
1
t
2
3
Tempo, t
4
5
η X (t ) = E{X (t )} =
Δ
∑ x ⋅ P( X (t ) = x )
i
i
i
14
7
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Indici statistici di un processo aleatorio
Valor medio (ordine 1)
⎧ +∞
⎪ ∫ xff X ( x; t )dx = μ (t ) pproc. continuo
⎪− ∞
E{X (t )} = ⎨
⎪
proc. discreto
⎪∑ xi P( X (t ) = xi )
⎩ i
Per un processo parametrico
X (t ) = g (t , ϑ )
E{ X (t )} = E{g (t , ϑ )} =
+∞
∫ g (t ,ϑ ) f
θ
(ϑ )dϑ
−∞
F
Funzione
i
di autocorrelazione
t
l i
(ordine
( di
2)
+∞+∞
⎧ ∫ ∫ x1 x2 f X ( x1 , x2 ; t1 , t 2 )dx1dx2
Processo continuo
⎪ −∞−∞
RXX (t1 , t 2 ) = E{X (t1 ) X (t 2 )} = ⎨
⎪ ∑∑ xi x j P{ X (t1 ) = xi , X (t 2 ) = x j } Processo discreto
⎩ i j
15
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Indici statistici di un processo aleatorio
Funzione di autocovarianza (ordine 2)
C XX (t1 , t 2 ) = E{[ X (t1 ) − μ (t1 )][ X (t 2 ) − μ (t 2 )]} == R XX (t1 , t 2 ) − μ (t1 ) μ (t 2 )
se t1 = t 2 = t
C XX (t , t ) = E{ X 2 (t )} − μ 2 (t ) = σ 2 (t )
Esempio
i 1 X (t ) = Ω e − t u (t )
+∞
E{ X (t )} = ∫ ω e −t u (t ) f Ω (ω )dω =
−∞
Varianza
(ordine 1)
Ω è una v.a.
assume i valori del lancio di un dado
Ω = {ωi} = {1,2,..,6}
−∞
6
6
i
1
−t
−t
= ∑ e −t u (t ) ∫ ωδ (ω − i )dω = e u (t )∑ = 3.5e u (t )
i =1 6
E{ X (t )} = ∫ g (t , ϑ ) f (ϑ )dϑ i =1 6
16
−∞
+∞
θ
−∞
8
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Esempio 2: processo armonico
X (θ , t ) = A cos (2πf 0 t + θ )
2π
E{ X (t )} =
dove θ è una v.a. uniformemente
di ib i in
distribuita
i [0,2π]
[0 2 ]
1
∫ A cos(2πf t + θ ) 2π dθ = 0
0
0
R XX (t1 , t 2 ) = E{X (t1 ) X (t 2 )} =
= E {A cos(( 2πf 0t1 + θ ) A cos(( 2πf 0t 2 + θ )}=
=
A2
A2
cos[2πf 0 (t1 − t 2 )] +
2
2
=
A2
cos[2πf 0 (t1 − t 2 )] + 0 = R X (τ )
2
posto τ = t
∫
2π
0
cos[2πf 0 (t1 + t 2 ) + 2α ]
1
NOTA:
A2
E{cos[2πf 0 (t1 − t 2 )] + cos[2πf 0 (t1 + t 2 ) + 2θ ]} =
2
1
dα =
2π
integrando il cos(a+θ) per θ∈[0,2π]. ATTENZIONE:
la frequenza è1/ π, quindi è già nullo in [0,π]
− t2
R XX (t1 , t 2 ) in questo caso non dipende dagli istanti, ma solo dalla loro distanza
17
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
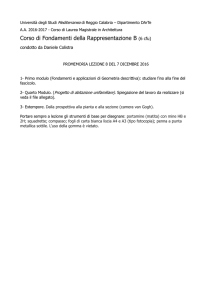
Esempio
Consideriamo il processo X(t) = Ω , dove Ω è una
v.a. ∈[-1,1] uniformemente distribuita
x(t , ωi )
+1
fX(x;t)
t
-1
X (t ) = ωi
⎧1
⎪
f X ( x; t ) = ⎨ 2
⎪⎩ 0
∀t
x ∈ [−1,1]
altrove
1
-1
fX(x;t) coincide con la pdf della Ω, ∀t
1
E{ X (t )} = μ = ∫ xf X ( x; t )dx = 0
−1
{ }
1
R XX (t1 , t 2 ) = E{X (t1 ) X (t 2 )} = E X 2 = ∫ x 2
−1
1
1
dx =
2
3
NOTA: Il valore medio non
dipende dal tempo perché
non ne dipende la fX
18
9
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
PROCESSI ALEATORI
STAZIONARI
19
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Processi stazionari
Definizione:
un processo si dice stazionario in senso stretto se una
traslazione temporale modifica le forme d’onda ma il
comportamento statistico rimane invariato, cioè:
f X ( x1 , x2 ,K , xn ; t1 , t 2 ,K, t n ) = f X (x1 , x2 , K, xn ; t1 + ε , t 2 + ε , K, t n + ε )
∀ε
∀n
Se la relazione vale per n=M fissato (⇒∀k≤M),
) il processo si dice
stazionario di ordine M
Un processo si dice stazionario in senso lato (SSL) (o in senso
debole) se:
E{X (t )} non dipende dal tempo
RXX (t1 , t 2 ) = RX (τ )
con
τ = t 2 − t1
20
10
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Processi stazionari almeno in senso lato
Processo STAZIONARIO IN SENSO LATO (SSL) se:
E[X(t)] è indipendente dal tempo
RXX (τ) dipende solo dalla distanza tra gli istanti
21
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Processi stazionari almeno in senso lato
Proprietà della funzione di autocorrelazione
R XX (τ ) = E{X (t + τ ) ⋅ X (t )}
•RXX(τ)=RXX(-τ)
•RXX(0)=E{[X(t)]2}≥0
Potenza media statistica istantanea
•| RXX(τ)|≤RXX(0)
Proprietà della funzione di autocovarianza
CX(t1,t2) = E{X(t1) X(t2)}–μX(t1)μX(t2)
Se RXX dipende solo da τ
CXX (τ) dipende solo da τ
Se il valor medio è costante
22
11
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Processo stazionario in senso lato
RXX (τ ) = E{X (t + τ ) ⋅ X (t )}
Consideriamo un processo X(t) stazionario in senso
lato, che non contiene componenti periodiche. Risulta:
lim R XX (τ ) = μ X2
RX(τ)
τ →∞
μX2
Dimostrazione
2
lim E{X (t ) X (t + τ )} == lim E{X (t )}E{X (t + τ )} = μ X μ X = μ X
τ →∞
τ →∞
Il processo è stazionario in senso lato. Quindi il valor medio è indipendente dal tempo
23
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
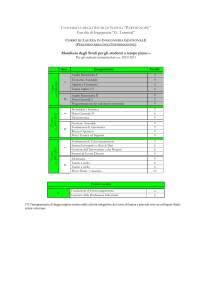
Significato della funzione di autocorrelazione per
un processo stazionario
Consideriamo due processi X1(t) e X2(t) con lo stesso
valore medio e stessa potenza, RXX(0)
X1(t)
X2(t)
varia lentamente
varia velocemente
Nello stesso tempo τ, X2(t) e X2(t + τ) sono più incorrelate di X1(t) e
X1(t + τ) , cioè:
Rx2(τ) → μx2 più
iù velocemente
l
t di Rx1(τ)
L’Autocorrelazione misura la rapidità di variazione
del segnale aleatorio
RX(τ)
μX2
τ
24
12
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Significato della funzione di autocorrelazione per
un processo stazionario
Distanza di incorrelazione
RXX (τ )
RXX (τ )
μ X2
μ X2
τcorr
τcorr : minima distanza
τcorr
di tempo affinché le v.a.
estratte dal processo
siano incorrelate
Funzione di autocovarianza normalizzata
(per confrontare grandezze diverse):
Cˆ XX (τ ) =
{
}
R XX (τ ) − μ X2
σ X2
2
2
2
dove σ X = E X (t ) − μ X è la varianza
Cˆ XX (τ )
1
τcorr
Cˆ XX (τ ) = 0
Cˆ XX (0) = 1 τlim
→∞
Fondamenti di TLC - Prof. G. Schembra
25
6 – Processi aleatori
POTENZA
ENERGIA E
SPETTRO DI POTENZA
26
13
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Potenza ed energia
X(t):
x(t,ωi):
Definizioni:
processo casuale
realizzazione
per ogni realizzazione l’energia e la potenza sono definiti
come segue:
+∞
ε i = ∫ x 2 (t , ω i )dt
<∞
il segnale è di energia
−∞
1
T →∞ T
+T / 2
pi = lim
∫x
2
(t , ω i )dt
0<p<∞
il segnale è di potenza
−T / 2
ogni realizzazione ha una diversa ε e p
quindi per un processo si hanno più valori di p e di ε
Definisco quindi le due variabili aleatorie
εX = {ε1, ε2, …}
pX = {p1, p2, …}
27
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Potenza ed energia
Utilizziamo la seguente notazione:
εX =
+∞
2
∫ X (t )dt
1
T →∞ T
p x = lim
−∞
+T / 2
∫X
2
(t )dt
−T / 2
Definizioni:
Energia del processo X(t)
+∞
⎧+∞
⎫ +∞
Ε X = E{ε X } = E ⎨ ∫ X 2 (t )dt ⎬ = ∫ E X 2 (t ) dt = ∫ R XX (t , t )dt
⎭ −∞
⎩− ∞
−∞
{
}
Potenza del processo X(t)
+T / 2
+T / 2
+T / 2
⎫
⎫
⎧
1
1 ⎧
1
2
2
PX = E{ p x } = E ⎨ lim
X
(
t
)
dt
=
lim
E
X
(
t
)
dt
=
lim
RXX (t , t )dt
⎬ T →∞
⎬ T →∞
⎨
T →∞ T ∫
T ⎩−T∫/ 2
T −T∫/ 2
−T / 2
⎭
⎭
⎩
28
14
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Spettro di potenza
Ricerchiamo una definizione di Densità Spettrale di Potenza
(spettro di potenza) congruente con quella dei segnali
determinati
Ogni realizzazione ha una diversa densità spettrale di potenza
⎧⎪ x (t , ω i ) | t |< T / 2
x T (t , ω i ) = ⎨
⎪⎩ 0
altrove
| X T ( f ,ω i ) |2
S X ( f ,ω i ) = lim
T →∞
T
dove X T ( f ,ω i ) = ℑ{xT (t ,ω i )}
29
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Spettro di potenza di un processo
aleatorio
Definizione 1: spettro di potenza
{
⎧
| X ( f ) |2 ⎫
E | X T ( f ) |2
= lim
S X ( f ) := E{S X ( f , ω )} = E ⎨ lim T
⎬
T
T
⎩T →∞
⎭ T →∞
}
Conseguenza:
(per i processi stazionari almeno in senso lato)
come per i segnali determinati:
S X ( f ) = ℑ{RXX (τ )} Teor. Di Wiener-Khintchine
+∞
∫S
−∞
X
( f )df = ℑ−1{S X ( f )} = RXX (0) ≡ PX
τ =0
Per un processo stazionario la SX(f) è la
densità spettrale di potenza
30
15
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Spettro di potenza e funzione di
autocorrelazione
Notiamo che:
Lo Spettro di Potenza di un p.a. stazionario SX(f)=ℑ[RX(τ)]
soddisfa tutte le proprietà della densità spettrale di potenza
di un segnale determinato
La Funzione di Autocorrelazione di un p.a. stazionario RX(τ)=
ℑ[X(t)X(t+τ)] soddisfa le stesse proprietà
dell’autocorrelazione di un segnale determinato
31
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
PROCESSI ALEATORI
ERGODICI
32
16
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Ergodicità del valor medio di un processo
aleatorio
MEDIA TEMPORALE
1
T →∞ T
(1) < x(t , ω i ) >= lim
MEDIA STATISTICA
+T / 2
∫ x(t , ω i )dt
+∞
(2) E{ X } =
−T / 2
∫ xf
X
( x)dx
−∞
Il processo è ergodico in valor medio se:
la (1) e la (2) coincidono con probabilità 1
la media temporale è un numero. Ne segue che anche la
media statistica non deve dipendere da t
33
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Ergodicità della funzione di
autocorrelazione di un processo aleatorio
A t
Autocorrelazione
l i
[temporale]
[t
l ] del
d l segnale
l x(t,
( ωi)
T /2
1
x(t + τ , ω i ) x(t , ω i ) dt
T →∞ T ∫
−T / 2
Rxi (τ ) = lim
Il processo è ergodico in autocorrelazione se:
Rxi (τ ) = R X (τ ) = E{ X (t ) X (t + τ )}
Inoltre, in tal caso si ha:
S xi ( f ) = S X ( f )
34
17
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Ergodicità in senso lato
Un processo è ergodico in senso lato quando
l’ergodicità è verificata per le funzioni:
Valor medio
Autocorrelazione
Cioè se, scelta a caso una qualsiasi realizzazione,
le medie di insieme coincidono con quelle temporali
con probabilità 1
Ogni realizzazione fornisce una buona stima
delle caratteristiche spettrali del processo
35
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Processi ergodici
Definizione: p
processo ergodico
g
in senso stretto
è un processo strettamente stazionario per il quale è sufficiente
una sola realizzazione, scelta a caso, per ottenere con probabilità
unitaria, tutte le informazioni statistiche
In altre parole:
tutte le medie temporali sono uguali (con probabilità 1) alle
corrispondenti medie statistiche
Q l
Qualunque
sia
i la
l funzione
f
i
campione
i
scelta,
lt tranne
t
per un insieme
i i
con probabilità nulla, si dice che:
la media verticale (d’insieme) coincide
con quella orizzontale (temporale)
36
18
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Processi ergodici
CONSEGUENZA:
È possibile misurare certe statistiche, definite come medie di
insieme, mediante le corrispondenti medie temporali calcolate
su una sola (qualsiasi) realizzazione
37
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
PROCESSI ALEATORI
NOTEVOLI
38
19
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Processi aleatori Gaussiani
Definizione:
un processo aleatorio X(t) è Gaussiano se le n variabili aleatorie
[X(t1), …, X(tn)] da esso estratte agli istanti [t1, …, tn] risultano
congiuntamente Gaussiane per ogni n, e per qualunque n-upla
di istanti, cioè se:
f X ( x1 , K , xn ; t1 , K , t n ) =
1
(2 π )n det(C XX )
e
(
− 0.5 X −η X
)T C−XX1 ( X −η X )
determinante
Caratterizzazione completa:
sono sufficienti
[C XX (t1 , t2 )]
η X (t )
39
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Processi aleatori Gaussiani
dove:
f X ( x1 , K , xn ; t1 , K , t n ) =
1
(2 π )
n
C XX
e
(
− 0.5 X −η X
)T C −XX1 ( X −η X )
Vettore dei valori medi
η X = [η X (t1 ),K,η X (t n ) ]
T
Matrice delle autocovarianze
[C XX ][i ,k ] = C XX (ti , tk ) =
= RXX (ti , t k ) − η X (ti )η X (t k )
⎡ C XX (t1 , t1 ) C XX (t1 , t2 )
⎢C (t , t ) C (t , t )
[C XX ] = ⎢ XX 2 1 XX 2 2
⎢
⎢
⎣C XX (t n , t1 ) C XX (tn , t1 )
C XX (t1 , t n )⎤
C XX (t2 , tn )⎥⎥
⎥
⎥
C XX (t n , t n )⎦
Proprietà fondamentali:
se un processo Gaussiano è stazionario in senso lato, allora è
anche stazionario in senso stretto
due processi gaussiani, se incorrelati, sono anche indipendenti
40
20
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
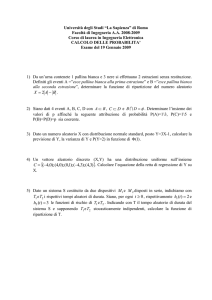
Rumore bianco
Il rumore bianco è un processo aleatorio (cioè un
modello matematico astratto) caratterizzato da:
N
SX ( f ) = 0
e
μX = 0
2
RXX (τ )
SX ( f )
N0 2
N0 2
τ
f
Per ogni frequenza, il processo ha lo stesso contenuto di potenza
Come la luce bianca che contiene tutti i colori; per questo il rumore è
detto bianco
Fondamenti di TLC - Prof. G. Schembra
41
6 – Processi aleatori
Rumore bianco
RXX (τ) è un impulso. Quindi, presi due istanti anche vicinissimi, i valori
assunti dal processo nei due istanti sono incorrelati
Il rumore bianco non esiste nella realtà poiché risulta a potenza infinita
Esso serve come modello di un’ampia gamma di segnali, per i quali si
può assumere che non ci sia correlazione tra i valori assunti dal segnale
p
g
in tempi diversi
Tra i rumori bianchi un caso particolare è costituito dal rumore termico
dovuto all’agitazione termica degli elettroni
42
21
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
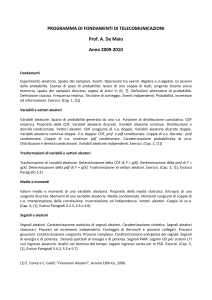
Rumore termico
Consideriamo una R ad una certa temperatura T1
R
Ogni elettrone contribuisce a generare una tensione V
di disturbo che è dovuta alla temperatura T, il processo
che rappresenta la tensione V è di tipo gaussiano
È stato verificato che SV(f) è del tipo
SV(f)
f0 dell’ordine dei THz (Tera =1012)
f0=6.025 THz
f0
f
43
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Rumore termico
SV(f)
f0 dell’ordine dei THz (Tera =1012)
f0=6.025 THz
f0
f
La tensione che si genera dovrà interagire con l’esterno, visto che
tutti i sistemi hanno una banda che sicuramente è inferiore ai THz
Posso considerare il rumore termico come rumore bianco nel range
di frequenza di interesse
SV(f)
H(f)
f0
44
22
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Rumore termico ai capi di una resistenza
Il rumore termico di una resistenza a temperatura T
T
R è la resistenza in Ω
T è la temperatura in gradi °K
K è la costante di Boltzman K=1.37E-23 J/°K
R
è modellato con una resistenza ideale ( T =0 °K) in serie con un
generatore di tensione (processo bianco)
ne (t )
R
E{ne (t )} = 0
Rne ne (τ ) = 2 KRT δ (τ )
S ne ( f ) = 2 KRT
Fondamenti di TLC - Prof. G. Schembra
45
6 – Processi aleatori
CORRELAZIONE TRA DUE
PROCESSI ALEATORI
46
23
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Processi aleatori congiuntamente
stazionari
Definizione:
Due processi sono congiuntamente stazionari in
senso lato se:
X(t) e Y(t) sono singolarmente stazionari in senso lato
e RXY e RXY dipendono solo da τ
47
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Cross-correlazione e segnali incorrelati
Definizione: Cross-correlazione tra 2 segnali SSL e
congiuntamente
i t
t stazionari
t i
i
R XY (τ ) = E{X (t ) Y (t + τ )}
RYX (τ ) = E{Y (t ) X (t + τ )}
Definizione: X(t) e Y(t) SSL sono incorrelati se:
E{X (t ) ⋅ Y (t + τ )} = E {X (t )}⋅ E {Y (t + τ )} = μ X ⋅ μY
E{Y (t ) ⋅ X (t + τ )} = E{Y (t )}⋅ E{X (t + τ )} = μY ⋅ μ X
RXY (τ ) = RYX (τ )
Se X e Y sono SSL e congiuntamente stazionari, incorrelati e a media nulla
RXY (τ ) = RYX (τ ) = 0
Æ X e Y si dicono ortogonali
24
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Processi aleatori indipendenti e incorrelati
Notiamo che, se due processi sono incorrelati:
C XY (t1 , t 2 ) = E {[X (t1 ) − μ X (t1 )][X (t 2 ) − μY (t 2 )]} =
= E{X (t1 ) ⋅ Y (t 2 )}− μ X (t1 ) E{Y (t 2 )}− E{X (t1 )}μY (t 2 ) + μ X (t1 ) μY (t 2 ) =
= E{X (t1 )}⋅ E{Y (t 2 )} − μ X (t1 ) μY (t 2 ) = 0
C XY (t1 , t 2 ) = 0
49
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Caso rilevante: segnale + rumore termico
Consideriamo il segnale:
Z (t ) = X (t ) + Y (t )
RZZ (τ ) = E{[ X (t ) + Y (t )]⋅ [X (t + τ ) + Y (t + τ )]} =
= R XX (τ ) + RYY (τ ) + R XY (τ ) + RYX (τ )
Esempio: segnale + rumore termico
Il rumore ha valor medio nullo
RXY (τ ) = RYX (τ ) = 0
RZZ (τ ) = RXX (τ ) + RYY (τ )
La funzione di autocorrelazione di un segnale affetto da rumore
termico additivo è la somma delle funzioni di autocorrelazione del
segnale e del rumore
50
25
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Processi aleatori indipendenti e incorrelati
Definizione:
Due processi X(t) e Y(t) sono indipendenti se per ∀t1,t2, le
variabili aleatorie X(t1) e Y(t2) sono statisticamente indipendenti
Due processi X(t) e Y(t) sono incorrelati se:
per ∀ t1,t2 , R XY (t1 , t 2 ) = E {X (t1 )}E {Y (t 2 )} = μ X (t1 ) ⋅ μ Y (t 2 )
Notiamo che:
Indipendenti
Incorrelati
51
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
FILTRAGGIO DI PROCESSI
ALEATORI
52
26
Fondamenti di TLC - Prof. G. Schembra
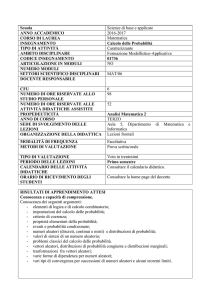
6 – Processi aleatori
Filtraggio di un segnale aleatorio con
sistemi lineari tempo-invarianti (LTI)
Il processo aleatorio è un modello di un segnale aleatorio
Il Σ è attraversato da una sola realizzazione
x(t,ωi)
T
y(t,ωi)
Y(t)
X(t)
x(t,ωj)
Y(t)=T[X(t)]
T
y(t,ωj)
Il Σ è deterministico:
X(t,ωi) = X(t, ω j) Æ Y(t, ω i) = Y(t, ω j)
53
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Notazione
S il Σ è LTI,
Se
LTI e h(t)
h( ) è la
l sua risposta
i
t all’impulso
ll’i
l
x(t,ωi)
h(t)
y(t,ωi)
Useremo la notazione:
(
)
y (t , ωi ) = xω ⊗ h (t )
(
i
)
y (t , ω j ) = xω j ⊗ h (t )
Y (t ) = ( X ⊗ h )(t )
processi aleatori !!!
54
27
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Trasmissione di processi attraverso
sistemi lineari tempo-invarianti (LTI)
Noto
N
t il processo aleatorio
l t i X(t) in
i ingresso
i
all sistema
i t
e la
l trasformazione
t f
i
T
del sistema, in generale non è possibile determinare il comportamento
statistico completo del processo aleatorio in uscita Y(t)
È però possibile calcolare valor medio e funzione di autocorrelazione
Eccezione per i sistemi senza memoria
l’l’uscita
it dipende
di
d dal
d l valore
l
istantaneo
i t t
dell’ingresso
d ll’i
fissato l’istante, il processo diventa una variabile aleatoria
in questo caso è possibile calcolare: f Y ( y, t )
X(t1)
Σ
Y(t1)
Σ
v.a.
v.a.
Trasformazione
di variabili
aleatorie
55
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Valor medio e Autocorrelazione del
processo di uscita
Dato un processo X(t) QUALUNQUE
caratterizzato da valor medio e funzione di autocorrelazione:
μ X (t )
RXX (t1 , t 2 )
Dato un sistema Σ LTI
caratterizzato da una risposta all’impulso h(t):
μY (t ) = E{Y (t )} = μ X (t ) ⊗ h(t )
t1
t2
RYY (t1 , t 2 ) = E {Y (t1 )Y (t 2 )} = R XX (t1 , t 2 ) ⊗ h(t1 ) ⊗ h(t 2 )
56
28
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Valor medio e Autocorrelazione del
processo di uscita
Dato un p
processo X(t)
( ) stazionario in senso lato
caratterizzato da valor medio e funzione di autocorrelazione:
μX
RXX (τ )
Dato un sistema Σ LTI
caratterizzato da una risposta all’impulso h(t):
+∞
μY = μ X ∫ h(t )dt = μ X ⋅ H (0)
X(t) e Y(t) risultano
congiuntamente
stazionari
−∞
R XY (τ ) = R XX (τ ) ⊗ h( −τ )
RYY (τ ) = RXX (τ ) ⊗ h(τ ) ⊗ h(−τ ) = RXX (τ ) ⊗ Rhh (τ )
SY ( f ) = ℑ{RYY (τ )} = S X ( f ) H ( f )
2
57
Fondamenti di TLC - Prof. G. Schembra
6 – Processi aleatori
Filtraggio di processi aleatori Gaussiani
Conservazione della Gaussianità
Processo di ingresso:
Processo di ingresso:
•
Gaussiano
•
Gaussiano
•
Stazionario in senso lato (e
quindi anche in senso stretto)
•
Stazionario in senso lato (e
quindi anche in senso stretto)
Sistema:
Sistema:
•
•
Lineare Stazionario
Lineare NON Stazionario
Processo di uscita:
Processo di uscita:
•
Gaussiano
•
•
Stazionario in senso lato (e
quindi anche in senso stretto)
Gaussiano
58
29