Teorema delle contrazioni e sistemi di
funzioni iterate
Luigi Orsina
Indice
Introduzione
5
Capitolo 1. Spazi metrici e teorema delle contrazioni
1. Definizioni ed esempi
2. Successioni di Cauchy e spazi metrici completi
3. Il teorema delle contrazioni
9
9
13
15
Capitolo 2. Insiemi compatti e distanza di Hausdorff
1. Insiemi compatti
2. La distanza di Hausdorff
3. Completezza di (K(X), h)
19
19
21
26
Capitolo 3. Sistemi di funzioni iterate
1. Da funzioni su X a funzioni su K(X)
2. Sistemi di funzioni iterate
3. Il teorema del collage
4. Sistemi di funzioni iterate con probabilità
33
33
41
43
51
Capitolo 4. Misura e dimensione di Hausdorff
1. La misura di Hausdorff
2. La dimensione di Hausdorff
55
55
60
Capitolo 5. La dimensione degli attrattori degli IFS
1. La dimensione box counting
2. Confronto tra box counting e Hausdorff
3. La dimensione di Hausdorff degli attrattori degli IFS
63
63
66
72
Strumenti e programmi
81
Indice analitico
95
3
Introduzione
Molti degli oggetti “reali” che ci circondano, come ad esempio nuvole,
alberi, felci e broccoli ( ) condividono una notevole proprietà: ognuno di essi
è uguale all’unione di copie (ridotte in dimensioni) dell’oggetto originale. Ad
esempio, la struttura “tronco da cui si dipartono rami” di un albero è replicata
nella struttura “ramo da cui si dipartono rametti”, e nella struttura “rametti
da cui si dipartono foglie”. Analogamente, le foglie di una felce ne replicano
la struttura globale, ed a loro volta sono costituite da microfoglie disposte in
modo da imitare la felce.
La felce (non vera!) come unione di copie di se stessa
Oggetti geometrici di questo tipo si dicono “autosimilari”: scopo di questo
articolo è spiegare (o, almeno, provare a spiegare. . .) come — usando la teoria
degli spazi metrici ed il teorema delle contrazioni — sia possibile costruire
in maniera semplice alcuni insiemi autosimilari. Il verbo “costruire” assume
qui due significati: in primo luogo vuol dire “costruire matematicamente”,
vale a dire caratterizzare dal punto di vista matematico tali insiemi; in secondo luogo vuol dire “costruire al computer”, ovvero indicare come dare una
rappresentazione (approssimata) di tali oggetti.
Gli “attori principali” del nostro lavoro saranno essenzialmente due: il teorema delle contrazioni e la distanza di Hausdorff. Il teorema delle contrazioni,
che “vive” nel contesto degli spazi metrici completi, afferma che una funzione f che “contrae” le distanze (per la definizione rigorosa si veda il Teorema
1.26 nel primo capitolo) ha un unico punto fisso, ovvero un elemento x dello
spazio su cui è definita f tale che f (x) = x. Questo teorema, che ha notevoli applicazioni ad esempio nella teoria delle equazioni differenziali ordinarie,
5
6
INTRODUZIONE
è fondamentale nel contesto che ci interessa grazie all’osservazione che una
contrazione porta sı̀ punti in punti, ma anche insiemi in insiemi; ed essendo
continua, porta compatti in compatti. Usando la distanza di Hausdorff (si
veda il secondo capitolo), che permette di misurare la distanza tra compatti
di uno spazio metrico, avviene il “miracolo”: se f è una contrazione da uno
spazio metrico in sé, allora la funzione F , definita da F (K) = {f (x) , x ∈ K}
per ogni compatto K, è una contrazione dallo spazio dei compatti in sé rispetto alla distanza di Hausodrff. Siccome (si veda sempre il secondo capitolo) lo
spazio dei compatti di uno spazio metrico completo è a sua volta completo una
volta che vi si consideri la distanza di Hausdorff, è possibile applicare il teorema delle contrazioni ad F , e dedurre cosı̀ l’esistenza di un unico “compatto
fisso” K, tale che F (K) = K.
Chiaramente, se x è il punto fisso di f , il compatto K = {x} è il compatto
fisso di F (è evidente che F ({x}) = {x}, e quindi per l’unicità del punto fisso
si ha la tesi), cosicché — almeno in apparenza — non c’è alcun guadagno
nel passaggio da funzioni su insiemi a funzioni di insiemi. Se però, invece di
avere una sola contrazione f , ne abbiamo due, siano esse f e g, allora risulta
essere una contrazione (sullo spazio dei compatti, e rispetto alla distanza di
Hausdorff) la funzione
F (K) = f (K) ∪ g(K) .
Nuovamente, se x è il punto fisso di f , e y è il punto fisso di g, allora {x, y}
è contenuto nel compatto fisso K di F (la dimostrazione di questo fatto è
meno semplice della precedente, ed usa la caratterizzazione del punto fisso di
una contrazione). In generale, però, {x, y} non è K. Infatti, se calcoliamo
F ({x, y}) troviamo
F ({x, y}) = {x , y , f (y) , g(x)} ,
che contiene strettamente {x, y} (a meno che non si abbia x = y). Pertanto, e
qui avviene il secondo “miracolo”, l’insieme K è più ricco dell’insieme ottenuto
dall’unione dei punti fissi di f e g. Quanto più ricco qui non diciamo (per non
scoprire troppo le carte ), limitandoci ad affermare che vedremo nel terzo
capitolo numerosi esempi di contrazioni definite su R2 che generano insiemi
autosimilari geometricamente complessi come punti fissi. Daremo inoltre una
“ricetta” (il cosiddetto teorema del Collage) per costruire (o, meglio, ricostruire) le contrazioni che generano come compatto fisso un insieme autosimilare
dato, o che generano un compatto fisso che approssima bene (nel senso della
distanza di Hausdorff) un insieme “reale” come un albero o una felce.
Una volta “costruiti” gli insiemi autosimilari, ci occuperemo di calcolarne
la dimensione. Prima di farlo, sarà necessario introdurre (nel quarto capitolo)
il concetto di misura di Hausdorff (sempre lui!), che estende al caso di dimensioni non intere la misura di Lebesgue. Partendo dalla misura di Hausdorff,
INTRODUZIONE
7
definiremo la dimensione di Hausdorff di un insieme, che coinciderà con la dimensione “classica” nel caso di oggetti “comuni” come punti, linee, quadrati,
cubi, eccetera.
Nell’ultimo capitolo calcoleremo la dimensione di Hausdorff di alcuni degli
insiemi autosimilari costruiti nel terzo capitolo. Per farlo definiremo prima il
concetto di dimensione box counting di un insieme, più facile da calcolare della
dimensione di Hausdorff, e poi dimostreremo due risultati: una formula che,
sotto opportune ipotesi sulle contrazioni che generano l’insieme autosimilare,
permette di calcolare a priori la dimensione box counting di un insieme, e successivamente un teorema che afferma, sotto le stesse ipotesi, che la dimensione
box counting e la dimensione di Hausdorff coincidono.
In appendice, infine, verrà brevemente spiegato come creare, in TEX quasi
tutte le figure presenti in questi appunti.
I risultati presentati in questi appunti sono essenzialmente contenuti nel
libro “Fractals everywhere” di Michael F. Barnsley (Academic Press, Boston,
1993 – collocazione: III 7 367), al quale si rimanda, e nel quale è possibile
trovare una descrizione completa ed auto-contenuta della teoria degli insiemi frattali (ben più completa di quella che viene qui proposta). Altri testi
consultati sono “Techniques in Fractal Geometry” di Kenneth Falconer (John
Wiley & Sons, New York, 1997), “Fractal Geometry: Mathematical Foundations and Applications”, sempre di Falconer (John Wiley & Sons, New York,
2003 – collocazione III 7 379), e l’articolo “Fractals and Self Similarity” di
John E. Hutchinson, Indiana Math. J. 30 (1981). Per la parte sulla misura
di Hausdorff, si veda “Weakly differentiable functions: Sobolev spaces and
functions of bounded variation” di William P. Ziemer (Springer, New York,
1989 – collocazione II 15 1750 e Col 10 120).
Disclaimer: Nessun pixel ha subito danni permanenti durante la stesura di questi appunti.
CAPITOLO 1
Spazi metrici e teorema delle contrazioni
In questo capitolo daremo le definizioni di base degli strumenti che useremo: definiremo gli spazi metrici, gli spazi metrici completi, ed infine enunceremo e dimostreremo il teorema delle contrazioni, risultato fondamentale nel
nostro contesto.
1. Definizioni ed esempi
Definizione 1.1. Se X è un insieme, una distanza su X è una funzione
d : X × X → R+ tale che
(d1 ) d(x, y) ≥ 0 per ogni x e y in X; d(x, y) = 0 se e solo se x = y;
(d2 ) d(x, y) = d(y, x) per ogni x e y in X;
(d3 ) d(x, y) ≤ d(x, z) + d(z, y) per ogni x, y e z in X.
La proprietà (d3 ) viene detta disuguaglianza triangolare.
Se d è una distanza su X, la coppia (X, d) si dice spazio metrico. La
funzione d viene anche chiamata metrica.
Esempio 1.2. Se X è un insieme qualsiasi, è una distanza su X la funzione
1 se x 6= y,
dd (x, y) =
0 se x = y.
La distanza dd viene detta metrica discreta.
Se X = R, è una distanza su X la funzione d(x, y) = |x − y|. Se X = R2 ,
è una distanza su X la funzione
p
d2 ((x1 , x2 ), (y1 , y2 )) = (x1 − y1 )2 + (x2 − y2 )2 ,
detta distanza euclidea. Se X = RN e p ≥ 1, sono distanze su X le funzioni
X
p1
N
p
dp ((x1 , . . . , xN ), (y1 , . . . , yN )) =
|xi − yi |
.
i=1
Se X = C 0 ([a, b]; R), lo spazio delle funzioni continue da [a, b] in R, sono
distanze su X le funzioni
d∞ (f, g) = max |f (x) − g(x)| ,
x∈[a,b]
9
10
1. SPAZI METRICI E TEOREMA DELLE CONTRAZIONI
e
Z
b
|f (x) − g(x)| dx .
d1 (f, g) =
a
– Esercizio 1.3. Si dimostri che le funzioni definite nell’Esempio 1.2
sono effettivamente delle distanze (per dp si rimanda ad un testo di Analisi II).
Successivamente, si interpreti geometricamente la disuguaglianza triangolare
per la distanza euclidea in R2 .
Esempio 1.4. Se X = R, non è una distanza la funzione d definita da
d(x, y) = |x2 − y 2 | .
Se X = S, lo spazio delle successioni {xn } di numeri reali, non sono
distanze su X le funzioni
d({xn }, {yn }) = max |xn − yn | ,
n∈N
d({xn }, {yn }) = sup |xn − yn | ,
n∈N
e
d({xn }, {yn }) =
+∞
X
|xn − yn | .
n=1
Se X = R([a, b]; R), lo spazio delle funzioni integrabili secondo Riemann
su [a, b], non è una distanza la funzione definita da
Z b
|f (x) − g(x)| dx .
d(f, g) =
a
– Esercizio 1.5. Si giustifichino le affermazioni dell’esempio precedente.
Definizione 1.6. Se (X, d) è uno spazio metrico, si chiama sfera aperta
di centro x0 e raggio r > 0 l’insieme
Br (x0 ) = {x ∈ X : d(x, x0 ) < r} .
La sfera chiusa di centro x0 e raggio r > 0 è invece l’insieme
B r (x0 ) = {x ∈ X : d(x, x0 ) ≤ r} .
Un sottoinsieme A di uno spazio metrico (X, d) si dice aperto se, per ogni
x0 in A, esiste r = r(x0 ) > 0 tale che Br (x0 ) ⊆ A. Un sottoinsieme C di uno
spazio metrico (X, d) si dice chiuso se il suo complementare C c = X \ C è
aperto. Un sottoinsieme B di uno spazio metrico (X, d) si dice limitato se
esiste x0 in X, e R > 0, tale che B ⊆ BR (x0 ).
1. DEFINIZIONI ED ESEMPI
11
Definizione 1.7. Se {xn } è una successione contenuta in uno spazio
metrico (X, d), diremo che la successione xn converge ad x0 in X, e scriveremo
lim xn = x0 ,
n→+∞
(X,d)
oppure xn −→ x0 ,
se si ha
lim d(xn , x0 ) = 0 .
n→+∞
L’ultima affermazione va intesa nel senso delle successioni di numeri reali: per
ogni ε > 0, esiste nε in N tale che 0 ≤ d(xn , x0 ) < ε per ogni n ≥ nε . Si noti
che la definizione di convergenza a zero della successione {d(xn , x0 )} coincide
con la definizione di convergenza a zero nello spazio metrico (R, | · |).
Teorema 1.8. Sia (X, d) uno spazio metrico, ed {xn } una successione
contenuta in X. Se la successione {xn } è convergente, allora il limite è unico.
Dimostrazione. È una semplice applicazione della disuguaglianza triangolare. Supponiamo che la successione {xn } converga ad x0 e ad y0 . Per
definizione, si ha
lim d(xn , x0 ) = 0 ,
n→+∞
e
lim d(xn , y0 ) = 0 .
n→+∞
Ma allora si ha
0 ≤ d(x0 , y0 ) ≤ d(xn , x0 ) + d(xn , y0 ) ,
e siccome la successione a destra è infinitesima, dal teorema dei carabinieri
segue che d(x0 , y0 ) = 0, e quindi che x0 = y0 , come volevasi dimostrare.
Esempio 1.9. È evidente dalla definizione che in (X, d) = (R, | · |) la
convergenza di una successione è la “solita” definizione di convergenza per
successioni di numeri reali. Se (X, d) = (RN , d2 ), si vede facilmente che la
convergenza di successioni è equivalente alla convergenza (in (R, | · |)) componente per componente. Lo stesso vale in (RN , dp ), qualsiasi sia p ≥ 1. Se
(X, d) = (C 0 ([a, b], R), d∞ ), la convergenza per successioni di funzioni è la
convergenza uniforme.
– Esercizio 1.10. Si dimostrino le affermazioni dell’esempio precedente. Se (X, d) = (X, dd ), come sono fatte le successioni convergenti?
Teorema 1.11. Sia (X, d) uno spazio metrico, e sia C un sottoinsieme di
X. Allora C è chiuso e se solo se per ogni successione {xn } contenuta in C, e
convergente in X ad x0 , si ha che x0 appartiene a C.
Dimostrazione. Sia C chiuso e sia {xn } una successione contenuta in
C e convergente ad x0 ; supponiamo per assurdo che x0 non appartenga a C.
Pertanto, x0 appartiene a A = C c , che per definizione è un aperto, cosicché
esiste r > 0 tale che Br (x0 ) ⊆ A, da cui segue che Br (x0 ) ∩ C = ∅. Questo
fatto è però assurdo, dato che la successione {xn } è: 1) contenuta in C, e 2)
12
1. SPAZI METRICI E TEOREMA DELLE CONTRAZIONI
convergendo ad x0 , si trova definitivamente a distanza minore di r da x0 , e
quindi in Br (x0 ).
Supponiamo ora che C non sia chiuso, e costruiamo una successione contenuta in C e convergente ad un punto che non vi appartiene. Siccome C non è
chiuso, A = C c non è un aperto, e quindi esiste x0 in A tale che le sfere Br (x0 )
non sono contenute in A, qualsiasi sia r > 0. In altre parole, per ogni r > 0
esiste xr in C = Ac tale che xr appartiene a Br (x0 ). Se consideriamo ora la
successione {xn } ottenuta scegliendo r = n1 , abbiamo che: 1) è contenuta in
C, e 2) converge ad x0 , dato che d(xn , x0 ) < n1 , e x0 non appartiene a C. Definizione 1.12. Siano (X, d) e (Y, d) sono due spazi metrici; dato x0
appartenente ad X, una funzione f : X → Y si dice continua in x0 se, per
ogni successione {xn } contenuta in X e convergente ad x0 in X, si ha che la
successione {f (xn )} converge a f (x0 ) in Y . In formule:
(X,d)
∀{xn } ⊆ X : xn −→ x0 ,
(Y,d)
si ha f (xn ) −→ f (x0 ) ,
ovvero
∀{xn } ⊆ X : lim d(xn , x0 ) = 0 ,
n→+∞
si ha
lim d(f (xn ), f (x0 )) = 0 .
n→+∞
Una funzione f che sia continua per ogni x0 in A, sottoinsieme di X, si dice
continua in A.
Esempio 1.13. Se (X, d) = (Y, d) = (R, | · |), una funzione f : R → R è
continua (come funzione tra spazi metrici) se è continua (nel senso “classico”
del termine).
– Esercizio 1.14. Si determinino tutte le funzioni continue tra (R, | · |)
e (R, dd ), e tra (R, dd ) e (R, | · |).
– Esercizio 1.15. Sia (X, d) uno spazio metrico, e sia x0 in X fissato.
Si dimostri che la funzione dx0 : X → R, definita da
dx0 (y) = d(x0 , y) ,
∀y ∈ X ,
è continua tra (X, d) e (R, | · |). Suggerimento: si dimostri (usando due volte
la disuguaglianza triangolare) che si ha
|d(x0 , y) − d(x0 , z)| ≤ d(y, z) ,
∀y, z ∈ X .
Definizione 1.16. Dati (X, d) e (Y, d) due spazi metrici, una funzione
f : X → Y si dice lipschitziana se esiste L ≥ 0 tale che
d(f (x), f (y)) ≤ L d(x, y) ,
∀x, y ∈ X .
Un esempio di funzione lipschitziana (con L = 1) è la funzione dx0 definita
nell’Esercizio 1.15. È facile dimostrare che una funzione lipschitziana è continua (si usi la definizione di continuità, di lipschitzianità, ed il teorema dei
carabinieri).
2. SUCCESSIONI DI CAUCHY E SPAZI METRICI COMPLETI
13
– Esercizio 1.17. Dimostrare che ogni funzione f da (X, dd ) in sé è
lipschitziana con L = 1.
2. Successioni di Cauchy e spazi metrici completi
Definizione 1.18. Sia (X, d) uno spazio metrico, e sia {xn } una successione contenuta in X. La successione {xn } si dice di Cauchy, o fondamentale,
se per ogni ε > 0 esiste nε in N tale che
0 ≤ d(xn , xm ) < ε ,
∀n, m ≥ nε .
Teorema 1.19. Sia (X, d) uno spazio metrico, e sia {xn } una successione
contenuta in X. Se {xn } è convergente, allora è di Cauchy.
Dimostrazione. Dal momento che {xn } è convergente, esiste x0 in X
tale che, per ogni ε > 0, esiste nε in N tale che
0 ≤ d(xn , x0 ) <
ε
,
2
∀n ≥ nε .
Siano ora n e m in N maggiori di nε . Allora, per la disuguaglianza triangolare,
si ha
ε ε
0 ≤ d(xn , xm ) ≤ d(xn , x0 ) + d(xm , x0 ) < + = ε ,
2 2
e quindi la successione {xn } è di Cauchy.
Il viceversa del Teorema 1.19 non è vero. Ad esempio, se consideriamo
1
(X, d) = ((0, 1), | · |) e la successione xn = n+1
, allora abbiamo che {xn } è di
Cauchy perché converge a zero in (R, | · |), ma non converge in (X, d), dato che
il suo limite — che non può essere altro che zero per unicità — non appartiene
all’insieme.
– Esercizio 1.20. Come sono fatte le successioni di Cauchy di (X, dd )?
Esempio 1.21. Sia (X, d) = (C 0 ([−1, 1], R), d1 ), e consideriamo la successione {fn } definita da
−1 se −1 ≤ x < − n1 ,
nx se − n1 ≤ x ≤ n1 ,
fn (x) =
1 se n1 < x ≤ 1.
il cui grafico è
14
1. SPAZI METRICI E TEOREMA DELLE CONTRAZIONI
1
-1
− n1
1
1
n
-1
Se fissiamo n > m, allora la successione |fn − fm | vale
0
se m1 < |x| ≤ 1,
1 − m|x| se n1 ≤ |x| ≤ m1 ,
|fn (x) − fm (x)| =
(n − m)|x| se |x| ≤ n1 ,
ovvero
1−
-1
− m1
m
n
− n1
1
n
1
m
1
Pertanto,
Z
1
|fn (x) − fm (x)| dx =
d1 (fn , fm ) =
−1
m
1
1
1 1−
=
− .
m
n
m n
Dal momento che la successione { n1 } è di Cauchy in (R, | · |) (perché è convergente), ne segue che la successione {fn } è di Cauchy in (X, d). La successione {fn }, però, non converge in (X, d) ad alcuna funzione. Per assurdo,
supponiamo che esista una funzione f in C 0 ([−1, 1], R) tale che
Z 1
lim d1 (fn , f ) = lim
|fn (x) − f (x)| dx = 0 .
n→+∞
n→+∞
−1
Sia ora ε > 0, e sia n > 1ε . Allora, poiché le funzioni integrande sono positive,
si ha
Z 1
Z 1
0≤
|fn (x) − f (x)| dx ≤
|fn (x) − f (x)| dx ,
ε
−1
3. IL TEOREMA DELLE CONTRAZIONI
e quindi, essendo fn (x) ≡ 1 in [ε, 1],
Z
Z 1
|1 − f (x)| dx ≤
0≤
15
1
|fn (x) − f (x)| dx .
−1
ε
Facendo tendere n all’infinito si ha, ricordando che l’ultima quantità tende a
zero per ipotesi,
Z 1
0≤
|1 − f (x)| dx ≤ 0 .
ε
Essendo la funzione integranda continua e positiva, si ha che |1 − f (x)| ≡ 0
in [ε, 1], e quindi che f (x) ≡ 1 in [ε, 1]. Per l’arbitarietà di ε, si ha che
f (x) ≡ 1 in (0, 1]. Ripetendo il ragionamento nell’intervallo [−1, ε], si ottiene
che f (x) ≡ −1 in [−1, 0). La funzione f non può pertanto essere continua,
dato che si ha
lim− f (x) = −1 6= 1 = limx→0+ f (x) .
x→0
Definizione 1.22. Uno spazio metrico (X, d) tale che ogni successione di
Cauchy sia convergente viene detto spazio metrico completo.
Esempio 1.23. Lo spazio (X, dd ) è completo, qualsiasi sia X (si veda l’Esercizio 1.20). Sono completi gli spazi (R, | · |), (R2 , d2 ) e (RN , dp ), qualsiasi
sia p ≥ 1. Lo spazio (C 0 ([a, b], R), d∞ ) è completo.
Altri esempi di spazi completi si ottengono grazie al seguente teorema.
Teorema 1.24. Sia (X, d) uno spazio metrico completo, e sia C un sottoinsieme chiuso di X. Allora (C, d) è uno spazio metrico completo.
Dimostrazione. Sia {xn } una successione di Cauchy in (C, d). Chiaramente, {xn } è anche una successione di Cauchy in (X, d), che è completo.
Pertanto, esiste x0 in X tale che {xn } converge a x0 in (X, d). Essendo C
chiuso e {xn } contenuta in C e convergente ad x0 , per il Teorema 1.11 x0 appartiene a C. Abbiamo cosı̀ dimostrato che ogni successione {xn } di Cauchy
in (C, d) è convergente in (C, d), e quindi (C, d) è completo.
3. Il teorema delle contrazioni
Definizione 1.25. Sia (X, d) uno spazio metrico. Una funzione f : X →
X si dice una contrazione se è lipschitziana di costante θ < 1; ovvero se
esiste 0 ≤ θ < 1 tale che
d(f (x), f (y)) ≤ θ d(x, y) ,
∀x, y ∈ X .
Se f è una contrazione, la costante di lipschitz θ si chiama anche fattore di
contrazione.
Se (X, d) è uno spazio metrico, e f : X → X è una funzione, un punto x
di X si dice punto fisso per f se si ha f (x) = x.
16
1. SPAZI METRICI E TEOREMA DELLE CONTRAZIONI
Se (X, d) è uno spazio metrico, e f : X → X è una funzione, definiamo
la funzione iterata n-sima di f come la funzione f (n) : X → X data da:
f (1) (x) = f (x), e f (n) (x) = f (f (n−1) (x)) se n > 1.
Teorema 1.26. Sia (X, d) uno spazio metrico completo, e sia f : X → X
una contrazione. Allora f ha un unico punto fisso.
Dimostrazione. Sia x0 in X qualsiasi. Definiamo x1 = f (x0 ) = f (1) (x0 ),
x2 = f (x1 ) = f (2) (x0 ) e, per ricorrenza, xn = f (xn−1 ) = f (n) (x0 ). Si ha,
essendo f una contrazione,
d(xn+1 , xn ) = d(f (xn ), f (xn−1 )) ≤ θd(xn , xn−1 ) = θ d(f (xn−1 ), f (xn−2 ))
≤ θ2 d(xn−1 , xn−2 ) = θ2 d(f (xn−2 ), f (xn−3 ))
≤ θ3 d(xn−2 , xn−3 ) = . . .
≤...
≤ θn d(x1 , x0 ) .
Pertanto, se m < n, si ha (usando più volte la disuguaglianza triangolare):
d(xn , xm ) ≤
≤
n−1
X
k=m
n−1
X
k=m
d(xk+1 , xk )
θk d(x1 , x0 ) ≤ θm
1 − θn−m
θm
d(x1 , x0 ) ≤
d(x1 , x0 ) .
1−θ
1−θ
Sia ora ε > 0, e sia nε in N tale che θnε < ε(1 − θ)d(x1 , x0 ); si noti che tale
nε esiste perché la successione {θn } tende a zero essendo θ < 1. Pertanto, se
n e m sono maggiori di nε si ha d(xn , xm ) < ε, e quindi la successione {xn }
è di Cauchy in (X, d), spazio metrico completo. Ne segue che esiste x in X
tale che {xn } converge ad x. Essendo f continua (in quanto lipschitziana), se
ne deduce che f (xn ) converge a f (x) e quindi che f (xn−1 ) converge ad f (x)
(essendo una sottosuccessione estratta). Ma f (xn−1 ) è per definizione xn , e
quindi f (xn−1 ) converge a x. Per l’unicità del limite, si ha f (x) = x, e quindi
x è un punto fisso per f .
Supponiamo ora che x e y siano punti fissi per f , e che quindi si abbia
f (x) = x e f (y) = y. Allora, essendo f una contrazione, si ha
0 ≤ d(x, y) = d(f (x), f (y)) ≤ θ d(x, y) ,
da cui segue 0 ≤ (1 − θ) d(x, y) ≤ 0. Essendo θ < 1, deve per forza essere
d(x, y) = 0, e quindi x = y, cosicchè il punto fisso è unico.
Osservazione 1.27. Si noti che il punto fisso x viene trovato come limite dello schema iterativo xn−1 7→ xn = f (xn−1 ), ovvero della successione
{f (n) (x0 )}, qualsiasi sia la scelta del punto iniziale x0 . In altre parole, non
importa “da dove partiamo”: se f è una contrazione, al limite dell’iterazione
troveremo l’unico punto fisso.
3. IL TEOREMA DELLE CONTRAZIONI
17
Inoltre, passando al limite per m tendente ad infinito nella formula che
stima d(xn , xm ), si ha
θn
d(x1 , x0 ) ,
1−θ
e questa formula ci dice quanto velocemente {xn } converge a x.
(1.1)
d(xn , x) ≤
Esempio 1.28. Se abbiamo a disposizione una calcolatrice con una discreta precisione, ed in grado di calcolare le funzioni trigonometriche in radianti,
possiamo determinare il valore della soluzione dell’equazione cos(x) = x semplicemente: 1) settando la calcolatrice in radianti; 2) scrivendo “1” (o qualsiasi
altro valore); 3) premendo ripetutamente il tasto “cos”. Con un po’ di pazienza, alla fine si ottiene il valore 0.7390851332, che è un’approssimazione della
soluzione esatta.
y=x
cos(x) = x
x
y = cos(x)
– Esercizio 1.29. Come mai troviamo un unico punto fisso — e come
mai lo troviamo — premendo ripetutamente il tasto “cos”? La funzione cos(x)
non è una contrazione! Il teorema di Lagrange ci dice:
|cos(x) − cos(y)| = |−sen(ξ)| |x − y| ,
con ξ compreso tra x e y. Maggiorando |−sen(ξ)| con 1, otteniamo che cos(x)
ha L = 1 come costante di Lipschitz, e quindi non è una contrazione. Se
pensate di aver “maggiorato troppo”, e che forse c’è speranza che cos(x) sia
una contrazione, è sufficiente prendere x = π2 + ε e y = π2 per avere che
cos( π2 + ε)
cos(x) − cos(y)
sen(ε)
=
=−
,
x−y
ε
ε
e l’ultima frazione tende a −1 quando ε tende a zero, cosicché
L = sup
x, y∈R
| cos(x) − cos(y)|
= 1,
|x − y|
è la costante di lipschitzianità di cos(x).
18
1. SPAZI METRICI E TEOREMA DELLE CONTRAZIONI
Esempio 1.30. Sia
f (x, y) = ( x2 −
y
4
+ 34 , x4 +
y
2
+ 14 ) .
Si vede facilmente che f è una contrazione su R2 (quanto vale θ?), e quindi
ha un unico punto fisso, che è (1, 1). Nel disegno, si vede come partendo da
un punto qualsiasi del piano, le iterate convergano al punto fisso.
Il limite x non dipende da x0
CAPITOLO 2
Insiemi compatti e distanza di Hausdorff
In questo capitolo, basandoci sui risultati ottenuti nell’ambito degli spazi
metrici, introdurremo i concetti di insieme compatto e di distanza di Hausdorff. Dimostreremo inoltre la completezza dello spazio dei compatti di uno
spazio metrico completo rispetto alla distanza di Hausdorff.
1. Insiemi compatti
Definizione 2.1. Un sottoinsieme K di uno spazio metrico (X, d) si dice
compatto se da ogni successione {xn } contenuta in K si può estrarre una
sottosuccessione {xnk } convergente ad un punto x0 di K.
Un sottoinsieme A di uno spazio metrico (X, d) si dice totalmente limitato se per ogni ε > 0 esistono y1 , y2 , . . ., ynε in X tali che
nε
[
Bε (yi ) .
A⊆
i=1
– Esercizio 2.2. Si dimostri che ogni insieme totalmente limitato è
anche limitato. Suggerimento: detto R = max{d(yi , yj ), i, j = 1, . . . , nε } =
d(yi , yj ), allora. . .
Esempio 2.3. In (X, dd ) i compatti sono tutti e soli gli insiemi finiti.
Infatti, se K ⊆ X è finito, e {xn } è una successione contenuta in K, esiste x
in K, ed una successione {nk } di interi tale che xnk = x per ogni k, cosicché la
sottosuccessione {xnk } converge a x (si noti che questo fatto è vero qualsiasi
sia lo spazio metrico). Viceversa, se K ⊆ X non è finito, è possibile trovare
una successione {xn } contenuta in K tale che xn 6= xm per ogni n 6= m. Ma
allora dd (xn , xm ) = 1, e quindi la successione {xn } non è di Cauchy, né lo
è ogni sua sottosuccessione, che quindi non può convergere. Si noti che se
K ⊆ X è infinito, allora K non è totalmente limitato: è sufficiente scegliere
ε = 12 .
In (RN , d2 ) è invece ben noto che i compatti sono tutti e soli gli insiemi
chiusi e limitati.
Teorema 2.4. Sia (X, d) uno spazio metrico completo e sia K un sottoinsieme di X. Allora K è compatto se e solo se è chiuso e totalmente
limitato.
19
20
2. INSIEMI COMPATTI E DISTANZA DI HAUSDORFF
Dimostrazione. Supponiamo che K sia chiuso e totalmente limitato, e
sia {xn } una successione contenuta in K. Siccome K è totalmente limitato, al(1)
lora K è contenuto nell’unione di un numero finito di sfere di raggio 1, B1 (x1 ),
(1)
. . ., B1 (xm1 ). Essendo infiniti i punti della successione {xn }, in almeno una
(1)
delle sfere ne cadono infiniti: supponiamo che sia B (1) = B1 (x1 ), e sia n1 il
primo indice tale che xn1 appartiene a B (1) . Si dimostra facilmente che anche
B (1) ∩ K è totalmente limitato. Pertanto, esiste un numero finito di sfere di
(2)
(2)
raggio 21 , siano esse B 1 (x1 ), . . ., B 1 (xm2 ), tali che B (1) ∩ K è contenuto nella
2
2
loro unione. Come prima, esiste almeno una di queste sfere, e supporremo sia
(2)
B (2) = B 1 (x1 ), che contiene infiniti punti della successione. Sia n2 il primo
2
indice maggiore di n1 tale che xn2 appartiene a B (2) ∩ K. Ovviamente, si ha
B (2) ⊂ B (1) . Proseguendo, costruiamo una successione {B (m) } decrescente di
1
,
sfere di raggio 2m−1
B (1) ⊃ B (2) ⊃ B (3) ⊃ . . . ⊃ B (m) ⊃ . . . ,
ed una sottosuccessione {xn1 , xn2 , . . . , xnm , . . .}, con la proprietà che xni
appartiene a B (i) per ogni i. Sia ora ε > 0, e sia mε tale che 2m1ε −2 < ε. Se s e
t sono maggiori di mε , allora sia xns che xmt appartengono a B (mε ) , e quindi
distano tra di loro meno di 2m1ε −2 , ovvero meno di ε. Abbiamo cosı̀ che la
sottosuccessione {xnm } è di Cauchy in (X, d), che è completo. Ne segue che
esiste il limite di {xnm }, e che tale limite appartiene a K, essendo K chiuso
(si veda il Teorema 1.11), cosicché K è compatto.
Viceversa, supponiamo che K sia compatto. Se {xn } è una successione
contenuta in K e convergente in X ad x0 , allora da {xn } possiamo estrarre
una sottosuccessione convergente ad un punto y0 di K. Siccome tutte le
sottosuccessioni estratte da una successione convergente hanno lo stesso limite,
si ha che x0 = y0 , e quindi x0 appartiene a K. Per il Teorema 1.11, K è
chiuso. Supponiamo ora che esista ε > 0 tale che K non sia ricopribile con
un numero finito di sfere di raggio ε. Ciò vuol dire che esiste (almeno) una
successione {xn } contenuta in K e tale che d(xi , xj ) ≥ ε per ogni i 6= j.
Se ne deduce quindi che la successione {xn } non è di Cauchy (è sufficiente
prendere ε = ε nella definizione di successione di Cauchy), né lo è ogni sua
sottosuccessione. Ma questo è assurdo perché, essendo K compatto, esiste
almeno una sottosuccessione di {xn } convergente, e quindi di Cauchy.
Teorema 2.5. Siano (X, d) e (Y, d) spazi metrici, e sia f : X → Y
continua. Se K è compatto in (X, d), allora f (K) è compatto in (Y, d).
Dimostrazione. Sia {yn } una successione contenuta in f (K). Per ipotesi, esiste xn in K tale che f (xn ) = yn per ogni n in N. La successione {xn },
essendo contenuta nel compatto K, ammette una sottosuccessione {xnm } convergente ad x0 in K. Essendo f continua, la successione {ynm = f (xnm )},
2. LA DISTANZA DI HAUSDORFF
21
che è una sottosuccessione di {yn }, converge a f (x0 ), cha appartiene quindi a
f (K).
Se lo “spazio di arrivo” è R (o meglio (R, | · |)), vale l’analogo del teorema
di Weierstrass per funzioni reali di variabile reale.
Teorema 2.6. Sia (X, d) uno spazio metrico, K un sottoinsieme compatto
di X, e sia f : K → R una funzione continua. Allora f ammette massimo e
minimo.
Dimostrazione. La dimostrazione ricalca le linee della dimostrazione del
teorema di Weierstrass per funzioni reali di variabile reale. Sia infatti
M = sup f (x) ,
x∈K
e sia {xn } una successione, contenuta in K e che esiste per le proprietà
dell’estremo superiore, tale che
lim f (xn ) = M .
n→+∞
Essendo {xn } contenuta in K, che è compatto, esiste una sottosuccessione,
sia essa {xnk }, convergente a x0 appartenente a K. Essendo f continua, ed
essendo {f (xnk )} una sottosuccessione di {f (xn )}, si ha
f (x0 ) = lim f (xnk ) = lim f (xn ) = M ,
k→+∞
n→+∞
cosicché M è il massimo di f su K. La dimostrazione dell’esistenza del minimo
è identica.
2. La distanza di Hausdorff
Definizione 2.7. Se (X, d) è uno spazio metrico, definiamo K(X) l’insieme
K(X) = {K ⊆ X : K è compatto in X, K 6= ∅} .
Siano (X, d) uno spazio metrico, e K appartenente a K(X). Se x0 appartiene a X, definiamo la distanza di x0 da K come
d(x0 , K) = min{d(x0 , y), y ∈ K} .
Si noti che, essendo d(x0 , ·) una funzione continua (si veda l’Esercizio 1.15),
l’esistenza del minimo è garantita dal Teorema 2.6.
22
2. INSIEMI COMPATTI E DISTANZA DI HAUSDORFF
K
Alcune distanze dall’insieme K (appartenente a K(R2 , d2 ))
Teorema 2.8. Sia (X, d) uno spazio metrico, e sia K appartenente a
K(X). Allora la funzione dK : X → R definita da
dK (x) = d(x, K) ,
è continua.
Dimostrazione. Sia {xn } una successione contenuta in X e convergente
a x0 , e sia {xnk } una sua sottosuccessione. Poiché d(xnk , K) è un minimo, per
ogni n in N esiste ynk appartenente a K tale che
(2.1)
d(xnk , K) = d(xnk , ynk ) ≤ d(xnk , y) ,
∀y ∈ K .
Poiché la successione {ynk } è contenuta in K, che è compatto, esiste una sottosuccessione {ynkh } convergente ad y0 , appartenente a K. Pertanto, usando
due volte l’Esercizio 1.15 e passando al limite in (2.1),
d(x0 , y0 ) = lim d(xnkh , ynkh ) ≤ lim d(xnkh , y) = d(x0 , y) .
h→+∞
h→+∞
e quindi
d(x0 , y0 ) = min{d(x0 , y), y ∈ K} = d(x0 , K) .
Abbiamo cosı̀ dimostrato che
(2.2)
d(x0 , K) = lim d(xnkh , K) .
h→+∞
Dunque, da ogni sottosuccessione {xnk } estratta da {xn } si può estrarre una
sotto-sottosuccessione {xnkh } per la quale vale (2.2). Siccome il limite, che
è d(x0 , K), non dipende dalla sottosuccessione estratta, tutta la successione
converge a tale limite, ovvero:
d(x0 , K) = lim d(xn , K) ,
n→+∞
e quindi d(·, K) è una funzione continua.
2. LA DISTANZA DI HAUSDORFF
23
Definizione 2.9. Siano (X, d) uno spazio metrico, e K ed H appartenenti
a K(X). Definiamo la distanza (orientata) di K da H come
d(K, H) = max{d(x, H), x ∈ K} .
Per il Teorema 2.1, e per il Teorema 2.6, il massimo nella definizione di
distanza orientata è raggiunto. Pertanto, esiste x in K tale che d(K, H) =
d(x, H). Ricordando la definizione di distanza da H, esiste y in H tale che
d(x, H) = d(x, y). Ne segue che, se K e H appartengono a K(X), allora
esistono x in K e y in H tali che
d(K, H) = d(x, y) .
K
H
La linea tratteggiata più scura indica d(K, H)
Si noti che la funzione d cosı̀ definita non è una distanza. Infatti, se
K ⊂ H si ha d(K, H) = 0 (dato che d(x, H) = 0 per ogni x in K), e quindi
viene violata la (d1 ).
Definizione 2.10. Sia (X, d) uno spazio metrico completo. La distanza
di Hausdorff su K(X) è definita da
h(K, H) = max{d(K, H), d(H, K)} .
Teorema 2.11. La distanza di Hausdorff h : K(X) × K(X) → R+ è una
distanza. Pertanto, (K(X), h) è uno spazio metrico.
Dimostrazione. Che h(K, H) sia non negativa è evidente dalla definizione. Supponiamo ora di avere h(K, H) = 0. Allora, sempre per definizione,
si ha d(K, H) = 0, e d(H, K) = 0. Dimostriamo ora che se d(K, H) = 0,
allora K ⊆ H. Innanzitutto, per definizione di d(K, H) si ha d(x, H) = 0
per ogni x in K. Siccome d(x, H) è un minimo, esiste y in H tale che
d(x, y) = d(x, H) = 0, e quindi x = y. Pertanto, ogni x di K appartiene
ad H, che è quello che si voleva dimostrare. In definitiva,
d(K, H) = 0 ⇒ K ⊆ H
h(K, H) = 0 ⇒
⇒ H =K.
d(H, K) = 0 ⇒ H ⊆ K
La simmetria di h(K, H) è evidente, e quindi non rimane che dimostrare la
disuguaglianza triangolare. Dati H, K e L in K(X), iniziamo a dimostrare
24
2. INSIEMI COMPATTI E DISTANZA DI HAUSDORFF
che
(2.3)
d(H, K) ≤ d(H, L) + d(L, K) .
Sia x in H. Allora si ha, per ogni z in L, per definizione e per la disuguaglianza
triangolare,
d(x, K) = min{d(x, y), y ∈ K}
≤ min{d(x, z) + d(z, y), y ∈ K}
= d(x, z) + min{d(z, y), y ∈ K}
= d(x, z) + d(z, K)
≤ d(x, z) + max{d(z, K), z ∈ L} = d(x, z) + d(L, K) .
Pertanto, per ogni x in H e per ogni z in L, si ha
d(x, K) ≤ d(x, z) + d(L, K) ,
da cui, osservando che la quantità a sinistra non dipende da z, e prendendo il
minimo su z, si ha
d(x, K) ≤ min{d(x, z), z ∈ L} + d(L, K) = d(x, L) + d(L, K) .
Predendo il minimo su x in K a sinistra, ed il massimo su x in K a destra, si
ha allora
d(H, K) = min{d(x, K), x ∈ H}
≤ max{d(x, L) + d(L, K), x ∈ H} = d(H, L) + d(L, K) ,
che è proprio la (2.3). In maniera analoga, si dimostra che
(2.4)
d(K, H) ≤ d(K, L) + d(L, H) .
Usando sia la (2.3) che la (2.4), si ha allora
h(K, H) = max{d(K, H), d(H, K)}
≤ max{d(K, L) + d(L, H), d(H, L) + d(L, K)}
≤ max{d(K, L), d(L, K)} + max{d(L, H), d(H, L)}
= h(K, L) + h(L, H) ,
come volevasi dimostrare.
– Esercizio 2.12. Si dimostri che se a e b sono numeri reali, allora
max{a, b} =
a + b + |a − b|
.
2
Successivamente, si dimostri che
max{a + b, c + d} ≤ max{a, d} + max{b, c} .
– Esercizio 2.13. Si dimostri che se si parte da (X, dd ) allora la distanza
di Hausdorff su K(X) è nuovamente la distanza discreta (sui sottoinsiemi finiti
di X).
2. LA DISTANZA DI HAUSDORFF
25
Definizione 2.14. Sia (X, d) uno spazio metrico, e A un sottoinsieme di
X. Dato γ > 0, la dilatazione di γ dell’insieme A è l’insieme A + γ cosı̀
definito:
A + γ = {y ∈ X : d(x, y) ≤ γ, per qualche x di A} = {y ∈ X : d(y, A) ≤ γ} .
L’operazione di dilatazione non “distrugge” le proprietà dell’insieme.
Lemma 2.15. Sia (X, d) uno spazio metrico, e sia K in K(X). Allora K +ε
è chiuso per ogni ε > 0.
Dimostrazione. Sia {xn } una successione contenuta in K + ε e convergente in (X, d) a x0 . Per definizione di K + ε, d(xn , K) ≤ ε per ogni n in
N. Essendo la funzione x 7→ d(x, K) continua (per il Teorema 2.8) e {xn }
convergente,
d(x0 , K) = lim d(xn , K) ≤ ε ,
n→+∞
e quindi x0 appartiene a K + ε. Dal Teorema 1.11 segue la tesi.
Lemma 2.16. Sia (X, d) uno spazio metrico, siano K e H in K(X), e sia
δ > 0. Allora
(K + δ) ∪ (H + δ) ⊆ (K ∪ H) + δ .
Dimostrazione. Sia x in K + δ. Per definizione, d(x, K) ≤ δ, e quindi
d(x, K) = min{d(x, y), y ∈ K} ≤ δ .
Ma allora
d(x, K ∪ H) = min{d(x, y), y ∈ K ∪ H} ≤ min{d(x, y), y ∈ K} ≤ δ ,
cosicché x appartiene a (K ∪H)+δ; pertanto, K +δ ⊆ (K ∪H)+δ. Ripetendo
il ragionamento con H + δ si trova H + δ ⊆ (K ∪ H) + δ e quindi la tesi. Grazie alla dilatazione di un insieme, possiamo caratterizzare la distanza
di Hausdorff tra due compatti.
Lemma 2.17. Sia (X, d) uno spazio metrico, e siano H e K appartenenti
a K(X). Allora
K ⊆ H + ε,
h(K, H) ≤ ε ⇐⇒
H ⊆ K + ε.
Dimostrazione. Iniziamo col dimostrare che d(K, H) ≤ ε se e solo se
K ⊆ H + ε. Se d(K, H) ≤ ε si ha, per definizione di d(K, H), e per ogni x in
K,
d(x, H) ≤ max{d(x, H), x ∈ K} = d(K, H) ≤ ε ,
cosicché x appartiene a H + ε. In definitiva, K ⊆ H + ε, come volevasi
dimostrare. Supponiamo ora che K ⊆ H + ε; per ogni x in K si ha allora che
x appartiene a H + ε, e quindi si ha d(x, H) ≤ ε. Prendendo il massimo al
26
2. INSIEMI COMPATTI E DISTANZA DI HAUSDORFF
variare di x in K si ottiene d(K, H) ≤ ε, come volevasi dimostrare. La tesi si
dimostra allora facilmente, osservando che
d(K, H) ≤ ε ,
K ⊆ H + ε,
h(K, H) ≤ ε ⇐⇒
⇐⇒
d(H, K) ≤ ε ,
H ⊆ K + ε.
Osservazione 2.18. Grazie al Lemma precedente, possiamo definire in
maniera equivalente la distanza di Hausdorff tra due insiemi compatti nel
seguente modo:
h(H, K) = min{ε ≥ 0 : K ⊆ H + ε e H ⊆ K + ε} .
Usando le dilatazioni, possiamo dimostrare in maniera semplice una delle
proprietà di h.
Lemma 2.19. Sia (X, d) uno spazio metrico, e siano H, K, I e J in K(X).
Allora
h(H ∪ K, I ∪ J) ≤ max{h(H, I), h(K, J)} .
Dimostrazione. Sia δ = max{h(H, I), h(K, J)}. Siccome h(H, I) ≤ δ e
h(K, J) ≤ δ, si ha per il Lemma 2.17 che H ⊆ I + δ e K ⊆ J + δ. Pertanto,
H ∪ K ⊆ (I + δ) ∪ (J + δ), cosicché grazie al Lemma 2.16 si ha
H ∪ K ⊆ (I ∪ J) + δ .
Scambiando H e K con I e J si ha I ∪ J ⊆ (H ∪ K) + δ, e quindi, sempre per
il Lemma 2.17, h(H ∪ K, I ∪ J) ≤ δ, ovvero la tesi.
Il prossimo risultato ci sarà utile nel seguito.
Lemma 2.20. Sia {Kn } una successione in (K(X), h), convergente a K, e
supponiamo che A in K(K) sia tale che A ⊆ Kn per ogni n maggiore di un
certo n0 in N. Allora A ⊆ K.
Dimostrazione. Sia ε > 0, e sia nε in N tale che h(Kn , K) < ε per ogni
n maggiore di nε . Per il Lemma 2.17 si ha allora che Kn ⊆ K + ε per tali
n. Essendo A contenuto in Kn per n ≥ n0 , scegliendo n sufficiemente grande
abbiamo A ⊆ K +ε. Pertanto, se x è in A, si ha d(x, K) ≤ ε. Per l’arbitrarietà
di ε si ha d(x, K) = 0, e quindi x appartiene a K (ricordando che d(x, K) è
un minimo).
3. Completezza di (K(X), h)
Sia (X, d) spazio metrico, e sia {Kn } una successione di compatti in K(X).
La successione {Kn } è di Cauchy se, per ogni ε > 0, esiste nε in N tale che
per ogni n e m maggiori di nε si ha
Kn ⊆ Km + ε ,
h(Kn , Km ) < ε ⇐⇒
Km ⊆ Kn + ε .
3. COMPLETEZZA DI (K(X), h)
27
Sia ora {xn } una successione di X, con la proprietà che xn appartiene a Kn per
ogni n in N. Ovviamente, dall’essere {Kn } di Cauchy in K(X) non discende
che {xn } è di Cauchy in X: si pensi al caso in cui Kn = [−2, 2] per ogni n in
N, e xn = (−1)n . Supponiamo ora di avere una successione {xnk } di Cauchy,
con {nk } successione strettamente crescente di interi, tale che xnk in Knk per
ogni k: possiamo “estendere” questa successione ad una successione {x̃n }, che
sia ancora di Cauchy e sia tale che x̃nk = xnk per ogni k e che x̃n appartiene
a Kn per ogni n? La risposta è positiva, ed è data dal seguente lemma.
Lemma 2.21. Sia (X, d) uno spazio metrico, e sia {Kn } una successione
di Cauchy in (K(X), h). Data una successione strettamente crescente di interi
{nk }, e data una successione {xnk } di Cauchy in (X, d) e tale che xnk appartiene a Knk per ogni k in N, esiste una successione {x̃n } di Cauchy in (X, d),
con la proprietà che x̃n appartiene a Kn per ogni n in N, e che x̃nk = xnk per
ogni k in N.
Dimostrazione. Per ogni n < n1 , sia x̃n in An tale che
d(xn1 , x̃n ) = min{d(x, xn1 ), x ∈ An } = d(xn1 , An ) .
Scegliamo poi x̃n1 = xn1 e, per n compreso tra n1 + 1 e n2 − 1, sia x̃n in An
tale che
d(xn2 , x̃n ) = min{d(x, xn2 ), x ∈ An } = d(xn2 , An ) .
In generale, scegliamo x̃nk = xnk , e, per n compreso tra nk + 1 e nk+1 − 1,
scegliamo x̃n in An tale che
d(xnk+1 , x̃n ) = min{d(x, xnk+1 ), x ∈ An } = d(xnk+1 , An ) .
K2
K5
x̃2
K1
x̃1
Kn1
xn1
K6
x̃5
Kn2
x̃7
x̃3
K3
xn2
x̃6
K7
La scelta della successione {x̃n }
Ovviamente la successione cosı̀ costruita coincide con {xnk } per ogni k in
N, ed è tale che x̃n appartiene a An per ogni n in N, cosicché non resta che
28
2. INSIEMI COMPATTI E DISTANZA DI HAUSDORFF
dimostrare che è di Cauchy in (X, d). Sia ε > 0, e sia nε tale che
ε
nk , nh ≥ nε ⇒ d(xnk , xnh ) < ,
3
e
ε
n, m ≥ nε ⇒ h(An , Am ) < .
3
Un tale nε esiste perché la successione {xnk } è di Cauchy in (X, d), e perché
la successione {An } è di Cauchy in (K(X), h). Siano ora m e n maggiori di
nε , con m compreso tra nk−1 + 1 e nk , e n compreso tra nh−1 + 1 e nh . Allora
(2.5)
d(x̃n , x̃m ) ≤ d(x̃n , xnh ) + d(xnh , xnk ) + d(xnk , x̃m ) .
Ora, dal momento che h(An , Anh ) < 3ε , si ha d(Anh , An ) < 3ε , e quindi
ε
d(x, An ) < ,
∀x ∈ Anh .
3
Scegliendo x = xnh , otteniamo d(xnh , An ) < 3ε . Per definizione di x̃n (che è
un punto di An che realizza il minimo in d(xnh , An )), si ha d(xnh , x̃n ) < 3ε . Un
discorso analogo dimostra che d(xnk , x̃m ) < 3ε . Ricordando che d(xnh , xnk ) < 3ε
per ipotesi, ed usando la (2.5), si ha d(x̃n , x̃m ) < ε, e quindi la tesi.
Siamo pronti per dimostrare il teorema fondamentale.
Teorema 2.22. Sia (X, d) uno spazio metrico completo. Allora (K(X), h)
è uno spazio metrico completo. Inoltre, se {Kn } è una successione di Cauchy
in (K(X), h), allora l’insieme
K = lim Kn ,
n→+∞
è cosı̀ caratterizzato:
K = {x ∈ X : esiste una successione {xn ∈ Kn } che converge a x} .
Dimostrazione. La dimostrazione è divisa in cinque passi: se K è l’insieme definito nell’enunciato del teorema, allora
a) K è non vuoto;
b) K è chiuso (e quindi (K, d) è uno spazio metrico completo);
c) Per ogni ε > 0 esiste nε in N tale che K ⊆ An + ε per ogni n ≥ nε ;
d) K è totalmente limitato (e quindi, per b), è compatto);
e) Kn converge a K nella metrica di Hausdorff h.
a) Dal momento che {Kn } è di Cauchy in (K(X), h), per ogni ε > 0 esiste
nε in N tale che h(Kn , Km ) ≤ ε per ogni n e m maggiori di nε . Detto, per
k in N, εk = 21k , sia nk = nεk ; ovviamente, non è restrittivo supporre che
{nk } sia strettamente crescente. Sia xn1 appartenente a Kn1 ; dal momento
che h(Kn1 , Kn2 ) < 12 , esiste xn2 in Kn2 tale che d(xn1 , xn2 ) < 12 . Infatti,
1
1
1
h(Kn1 , Kn2 ) <
⇒ d(Kn1 , Kn2 ) <
⇒ d(xn1 , Kn2 ) < ,
2
2
2
3. COMPLETEZZA DI (K(X), h)
29
e quindi d(xn1 , xn2 ) < 21 , scegliendo xn2 in Kn2 che realizza il minimo. Supponiamo ora di aver scelto xn1 , xn2 , . . ., xnk−1 , con la proprietà che xnj appartiene
a Knj , e che
1
d(xnj−1 , xnj ) ≤ j−1 .
2
1
, con lo stesso ragionamento di prima
Allora, essendo h(Knk−1 , Knk ) < 2k−1
1
possiamo trovare xnk in Knk tale che d(xnk−1 , xnk ) < 2k−1
. In questa maniera
costruiamo una successione {xnk }, al variare di k in N, con la proprietà che
xnk appartiene a Knk , e che
1
d(xnk−1 , xnk ) < k−1 .
2
Dimostriamo ora che la successione {xnk } è di Cauchy in (X, d). Se h > k, si
ha infatti, per la disuguaglianza triangolare,
d(xnk , xnh ) ≤
h
X
h
X
d(xnj−1 , xnj ) ≤
j=k+1
j=k+1
1
2j−1
1
1
1 1 − 2h−k
1
= k−1 − h−1 ,
= k
1
2 1− 2
2
2
e quindi {xnk } è di Cauchy in (X, d) perché lo è in (R, | · |) la successione
1
{ 2k−1
} (dato che converge a zero). A questo punto applichiamo il Lemma
2.21, e costruiamo una successione {x̃n }, di Cauchy in (X, d), con la proprietà
che x̃n appartiene a Kn per ogni n in N. Essendo (X, d) completo per ipotesi,
{xn } converge in (X, d) ad x0 , che appartiene a K per definizione. Pertanto,
K è non vuoto, come volevasi dimostrare.
b) Sia {xn } una successione contenuta in K, convergente in (X, d) ad un punto
x0 . Vogliamo dimostrare che x0 appartiene a K, cosicché K sarà chiuso per
il Teorema 1.11. Per definizione di K, per ogni n in N esiste una successione
(n)
(n)
{yj }, con ym in Km per ogni m, convergente a xn . La convergenza di xn a
x0 implica che esiste una successione crescente {ni } di numeri interi tale che
1
d(xni , x0 ) < ,
i
(n)
mentre la convergenza di {ym } a xn implica che esiste una sottosuccessione
{mi } tale che
1
(ni )
d(ym
, xni ) < .
i
i
Usando la disuguaglianza triangolare e le ultime due disuguaglianze, abbiamo
che
2
(ni )
d(ym
, x0 ) < ,
i
i
e quindi
(ni )
lim ym
= x0 .
i
i→+∞
30
2. INSIEMI COMPATTI E DISTANZA DI HAUSDORFF
(n )
Consideriamo ora la successione {ymii } al variare di i. Ovviamente è di Cauchy
(n )
(dato che converge), e si ha — per definizione — ymii in Kni per ogni i.
Per il Lemma 2.21, esiste una successione di Cauchy {ỹn } che “estende” la
(n )
successione {ymii }, con la proprietà che ỹn appartiene a Kn per ogni n. Dal
momento che {ỹn } converge in (X, d) (essendo di Cauchy in uno spazio metrico
(n )
completo), e che la sua sottosuccessione {ymii } converge a x0 , si ha che {ỹn }
converge a x0 , che quindi — per definizione di K — appartiene a K.
c) Sia ε > 0, e sia nε in N tale che h(Kn , Km ) < ε per ogni n e m maggiori di
nε , cosicché d(Kn , Km ) < ε per gli stessi n e m, e quindi (per il Lemma 2.17)
Km ⊆ Kn + ε. Vogliamo dimostrare che K ⊆ Kn + ε. Sia allora x0 in K,
sia {xn ∈ Kn } una successione che converge a x0 in (X, d), e supponiamo che
nε sia anche tale che m ≥ nε implica d(xm , x0 ) < ε. Essendo xm in Km , ed
essendo Km contenuto in Kn + ε, si ha che xm appartiene a Kn + ε per ogni
m ≥ nε . Dal momento che Kn + ε è chiuso (per il Lemma 2.15), il limite della
successione {xm } appartiene a Kn + ε, e quindi x0 è in Kn + ε, come volevasi
dimostrare.
d) Supponiamo per assurdo che K non sia totalmente limitato. Pertanto,
esiste ε > 0 ed una successione {xn } contenuta in K tale che d(xn , xm ) ≥ ε
per ogni n 6= m in N. Per il punto c), esiste n sufficientemente grande tale che
K ⊆ Kn + 3ε , cosicché per ogni n esiste un punto yn in Kn tale che d(xn , yn ) < 3ε .
Essendo Kn compatto, e {yn } contenuta in Kn , esiste una sottosuccessione
{yni } convergente, e quindi di Cauchy. Pertanto, se i e j sono sufficientemente
grandi, si ha d(yni , ynj ) < 3ε . Ma allora, per la disuguaglianza triangolare, e
per la scelta di {xn },
ε ≤ d(xni , xnj ) ≤ d(xni , yni ) + d(yni , ynj ) + d(ynj , xnj ) < ε ,
che è assurdo. Mettendo insieme il punto b) e il risultato appena trovato con
il Teorema 2.4, si ha che K appartiene a K(X).
e) Usando c) ed il Lemma 2.17, per far vedere che {Kn } converge a K in
(K(X), h) è sufficiente far vedere che per ogni ε > 0 esiste nε in N tale che
Kn ⊆ K + ε per ogni n maggiore di nε . Sia allora ε > 0, e sia nε in N tale
che h(Kn , Km ) < 2ε per ogni n e m maggiori di nε . Dal Lemma 2.17 segue
allora che Km ⊆ Kn + 2ε per tali n e m. Sia ora n fissato e maggiore di
nε e sia {nj } una successione strettamente crescente di interi, con n1 > n,
tale che Knj−1 ⊆ Knj + 2εj per ogni j. Una tale successione si può costruire
usando il fatto che {Kn } è di Cauchy in (K(X), h) ed il Lemma 2.17. Essendo
n1 > n, e n > nε , si ha h(Kn , Kn1 ) < 2ε , e quindi Kn ⊆ Kn1 + 2ε (sempre
per il Lemma 2.17). Sia ora y in Kn ; siccome y appartiene a Kn1 + 2ε , esiste
xn1 in Kn1 tale che d(xn1 , y) < 2ε . Siccome Kn1 ⊆ Kn2 + 2ε2 , esiste xn2 in Kn2
tale che d(xn1 , xn2 ) < 2ε2 . Proseguendo, esiste una successione {xnj }, con xnj
3. COMPLETEZZA DI (K(X), h)
31
in Knj , tale che d(xnj−1 , xnj ) < 2εj per ogni j in N. Usando ripetutamente la
disuguaglianza triangolare come in a), si ha che d(y, xnj ) < ε per ogni j in N,
e che {xnj } è di Cauchy in (X, d). Per il Lemma 2.21, esiste una successione
{x̃n }, di Cauchy in (X, d), che estende {xnj } e tale che x̃n appartiene a Kn
per ogni n. Essendo {x̃n } di Cauchy, converge in (X, d) ad un punto x0
che, per definizione, appartiene a K. D’altra parte, siccome {xnj } converge
anch’essa a x0 , dalla disuguaglianza d(y, xnj ) < ε, e dall’Esercizio 1.15, segue
che d(y, x0 ) ≤ ε, cosicché y appartiene a K + ε. Abbiamo cosı̀ dimostrato,
come volevamo, che se n ≥ nε , allora Kn ⊆ K + ε.
Osservazione 2.23. Si noti che dal momento che (K(X), h) è completo
per il Teorema precedente, le successioni di Cauchy sono tutte e sole quelle
convergenti. Ne segue che se {Kn } è una successione di compatti convergente
a K, allora vale per K la caratterizzazione data dal Teorema: è l’insieme che
contiene tutti i limiti di tutte le successioni {xn ∈ Kn } convergenti.
CAPITOLO 3
Sistemi di funzioni iterate
Dopo aver posto le basi teoriche nei precedenti capitoli, introdurremo (mediante numerosi esempi) il concetto di sistema di funzioni iterate e di attrattore di un sistema di funzioni iterate; dimostreremo il teorema del Collage,
che ci darà la possibilità, dato un insieme compatto, di costruire il sistema di
funzioni iterate che lo genera (o che lo approssima) come attrattore.
1. Da funzioni su X a funzioni su K(X)
Sia (X, d) uno spazio metrico, e sia f : X → X una funzione continua.
Per il Teorema 2.5, se K appartiene a K(X), allora f (K) appartiene a K(X).
In altre parole, una funzione f continua da X in X genera una funzione F da
K(X) in sé definita da
F : K(X) → K(X)
K
7→ f (K)
Quali proprietà della funzione f “eredita” la funzione F ?
Teorema 3.1. Sia (X, d) uno spazio metrico, e sia f : X → X una
funzione lipschitziana di costante di lipschitz L. Allora la funzione F da
K(X) in sé definita da F (K) = f (K) è lipschitziana da (K(X), h) in sé, con
costante di lipschitz L.
Dimostrazione. Essendo f lispchitziana, si ha
d(f (x), f (y)) ≤ L d(x, y) ,
∀x, y ∈ X .
Siano ora K e H in K(X); iniziamo col dare una stima su d(f (K), f (H)). Per
definizione,
d(f (K), f (H)) = max min d(z, w) .
z∈f (K) w∈f (H)
Dal momento che per ogni z in f (K) esiste x in K tale che z = f (x), e per
ogni w in f (H) esiste y in H tale che w = f (y), possiamo riscrivere, usando
il fatto che f è lipschitziana,
d(f (K), f (H)) = max min d(f (x), f (y)) ≤ max min L d(x, y) = L d(K, H) .
x∈K y∈H
x∈K y∈H
Invertendo il ruolo di K e H si ottiene d(f (H), f (K)) ≤ L d(H, K) e quindi
h(f (K), f (H)) ≤ L h(K, H) ,
33
34
3. SISTEMI DI FUNZIONI ITERATE
come volevasi dimostrare.
Se, oltre ad essere lipschitziana, la funzione f è anche una contrazione,
allora anche la funzione F è una contrazione. Se (X, d) è completo, anche
(K(X), h) lo è (per il Teorema 2.22) e quindi ha un unico “compatto fisso”
(per il Teorema 1.26). Ovviamente, dato che anche f ha un unico punto fisso
x, è chiaro che il compatto invariante è l’insieme {x0 }. Ed infatti, se partiamo
da un qualsiasi insieme K0 e definiamo per ricorrenza Kn = F (n) (K0 ), allora
Kn contiene le iterate n-sime (tramite f ) dei punti di K0 . Dal momento che
ognuna delle iterate n-sime converge a x0 (si veda la dimostrazione del Teorema
1.26, o l’Osservazione 1.27), l’insieme limite di Kn nella metrica di Hausdorff
(che, sempre per la dimostrazione del Teorema 1.26, sappiamo essere l’insieme
invariante) è proprio {x0 } (essendo l’insieme costituito dall’unico limite di
successioni {xn ∈ Kn }, si veda la dimostrazione del Teorema 2.22).
In definitiva, partendo da una contrazione non si “guadagna” molto passando da X a K(X).
Supponiamo ora di avere non una, ma m contrazioni f1 , . . ., fm di fattori
di contrazione L1 , . . ., Lm rispettivamente. Dato che l’unione di un numero
finito di compatti è ancora un compatto, possiamo definire un’applicazione F
da K(X) in sé nel modo seguente:
(3.1)
F : K(X) → K(X)
m
[
K
7→
Fi (K) ,
i=1
dove Fi è la contrazione (di fattore contrattivo Li ) da K(X) in sé definita da
Fi (K) = fi (K) per ogni K in K(X).
Teorema 3.2. Sia (X, d) uno spazio metrico, e siano f1 , . . ., fm contrazioni
di X in sé di fattori di contrazione L1 , . . ., Lm . Allora la funzione F definita
da (3.1) è una contrazione di K(X) in sé, di fattore di contrazione
L = max{L1 , . . . , Lm } < 1 .
Dimostrazione. Siano H e K in K(X). Usando più volte il Lemma 2.19
abbiamo
[
m
m
[
h(F (H), F (K)) = h
Fi (H),
Fj (K) ≤ max {h(Fi (H), Fi (K))} .
i=1
1≤i≤m
j=1
Ricordando che le Fi sono contrazioni di fattore contrattivo Li si ha dunque
h(F (H), F (K)) ≤ max {Li h(H, K)} = max Li h(H, K) = L h(H, K) ,
1≤i≤m
come volevasi dimostrare.
1≤i≤m
1. DA FUNZIONI SU X A FUNZIONI SU K(X)
35
Se (X, d) è uno spazio metrico completo, e {fi }1≤i≤m sono contrazioni da X
in sé, allora F , definita in (3.1) è una contrazione e quindi, per il Teorema 1.26
ha un unico compatto invariante K, che può essere ottenuto come limite (nella
metrica di Hausdorff), della successione {Kn = F (n) (K0 )} ottenuta iterando F
a partire da un compatto qualsiasi K0 . È facile vedere che se xi è l’unico punto
fisso di fi , allora {x1 , . . . , xm } è contenuto in K. Infatti, se consideriamo
(n)
K0 = {xj }, per qualche j tra 1 e m, allora, dato che fj (xj ) = xj per ogni j,
xj ∈
m
[
{fi (xj )} = F (K0 ) = K1 ,
i=1
xj ∈
m
[
(2)
{fi (xj )} ⊆ F (K1 ) = K2 ,
i=1
ed in generale
xj ∈
m
[
(n)
{fi (xj )} ⊆ F (Kn−1 ) = Kn .
i=1
Siccome la successione costante {xn = xj } è tale che xn appartiene a Kn per
ogni n, e converge a xj , dalla caratterizzazione di K come limite dei Kn , si ha
che xj appartiene a K, qualsiasi sia j tra 1 ed m.
L’osservazione fondamentale è la seguente: è vero che nell’insieme invariante ci sono tutti i punti fissi delle m contrazioni, ma non solo. L’insieme
K può essere, in generale, molto più ricco, come mostra il seguente esempio.
Esempio 3.3. Sia (X, d) = (R2 , d2 ), e siano f1 : R2 → R2 e f2 : R2 → R2
definite da
f1 (x, y) = ( x2 , y2 ) ,
f2 (x, y) = f1 (x, y) + ( 21 , 12 ) .
È facile vedere che f1 e f2 sono contrazioni di fattore L1 = 21 = L2 , cosı̀ come
è facile vedere che (0, 0) e (1, 1) sono i punti fissi di f1 e f2 (non c’è bisogno
di iterare, basta calcolare!). Definita F da K(R2 ) in sé come
F (K) = F1 (K) ∪ F2 (K) ,
sappiamo che F è una contrazione di fattore contrattivo L = 12 . Essendo
(R2 , d2 ) completo, anche (K(R2 ), h) lo è, e quindi F ha un unico compatto
invariante K, che contiene sia (0, 0) che (1, 1). Consideriamo ora l’insieme
compatto
D = {(x, y) ∈ R2 : 0 ≤ y = x ≤ 1} ,
o, in altre parole, la diagonale che congiunge (0, 0) con (1, 1) nel quadrato
[0, 1] × [0, 1]. Ovviamente,
F1 (D) = D1 = {(x, y) ∈ R2 : 0 ≤ y = x ≤ 21 } ,
e
F2 (D) = D2 = {(x, y) ∈ R2 :
1
2
≤ y = x ≤ 1} ,
36
3. SISTEMI DI FUNZIONI ITERATE
cosicché
F (D) = F1 (D) ∪ F2 (D) = D .
Iterando F a partire da K0 = D, si ha pertanto Kn = F (n) (D) = D per ogni
n, e quindi K = D. In altre parole, il compatto invariante per F non si limita
ai due punti (0, 0) e (1, 1), ma è tutta la diagonale D: un insieme ben più
“ricco” dell’unione dei due punti.
D’altra parte, che l’insieme invariante fosse la diagonale del quadrato poteva essere anche dedotto “visivamente” disegnando sovrapposte le prime sei
iterate di Q = [0, 1] × [0, 1] tramite F .
Alcune iterate di Q sotto l’azione di F .
Nel disegno sono rappresentate in rosso le immagini di Q tramite f1 , ed in blu
le immagini di Q tramite f2 .
Perché non è solo la coppia di punti (0, 0) e (1, 1) l’insieme invariante, ma
è la diagonale? Proviamo a vedere cosa accade se prendiamo K0 = {(0, 0)}.
È vero che F1 (K0 ) = K0 (l’origine non si muove), ma F2 (K0 ) = {( 21 , 12 )},
cosicché
K1 = F (1) (K0 ) = {(0, 0), 21 , 12 } ,
che ha “un punto in più” rispetto a K0 . Continuando, e calcolando le immagini
dei due punti tramite f1 e f2 , si ha
K2 = F (2) (K0 ) = {(0, 0), 14 , 41 , 21 , 12 , 34 , 34 } ,
e, continuando,
Kn = F (n) (K0 ) =
k
, k
2n 2n
, k = 0, . . . , 2n − 1 .
1. DA FUNZIONI SU X A FUNZIONI SU K(X)
37
Dal momento che ogni x in [0, 1) si può espandere in forma binaria come
x=
+∞
X
ak (x)
,
k
2
k=1
con ak in {0, 1} per ogni k, e non definitivamente uguale a 1, se definiamo
n
X
ak (x)
kn (x)
xn =
=
,
k
2
2n
k=1
allora kn (x) è un intero compreso tra 0 e 2n − 1, e quindi (xn , xn ) appartiene
a Kn per ogni n. Poiché {(xn , xn )} converge a (x, x), tale punto appartiene
all’insieme invariante K per il Teorema 2.22. In altre parole, siccome consideriamo due funzioni, è vero che una delle due lascia invariato un punto,
ma l’altra ne aggiunge di nuovi, che poi l’azione combinata delle due funzioni
provvede a “moltiplicare” in numero, fino a “riempire” la diagonale.
Un altro modo di “recuperare” la diagonale del quadrato è il seguente:
partiamo da (x0 , y0 ) = (0, 0), disegniamo il punto (x0 , y0 ) e lanciamo una
moneta: se esce testa, definiamo (x1 , y1 ) = f1 (x0 , y0 ), mentre se esce croce
definiamo (x1 , y1 ) = f2 (x0 , y0 ); disegniamo (x1 , y1 ) e, nuovamente, lanciamo
una moneta, usando f1 o f2 per definire (x2 , y2 ) a seconda se esca testa o
croce. Ripetendo l’operazione, dopo un numero abbastanza elevato di lanci
avremo un’approssimazione dell’insieme invariante K (il perché ciò sia vero
sarà spiegato rigorosamente in seguito). Ad esempio, se lanciamo duecento
volte la moneta, abbiamo
La diagonale approssimata da 200 scelte casuali di f1 ed f2
38
3. SISTEMI DI FUNZIONI ITERATE
Nel disegno, sono colorati in rosso i punti ottenuti scegliendo f1 , e in blu quelli
ottenuti scegliendo f2 . Si noti la differenza con il disegno precedente, dove in
rosso erano rappresentate le immagini del quadrato Q = [0, 1] × [0, 1] tramite
f1 , ed in blu le immagini di Q tramite f2 .
Esempio 3.4. Adesso complichiamo (o miglioriamo. . .) le cose: invece di
considerare due contrazioni, ne consideriamo tre. Siano allora
f1 (x, y) = ( x2 , y2 ) ,
f2 (x, y) = f1 (x, y) + ( 21 , 12 ) ,
f3 (x, y) = f1 (x, y) + ( 21 , 0) .
La funzione F da K(R2 ) in sé definita da
F (K) =
3
[
Fi (K) ,
i=1
è una contrazione di fattore L = 12 , e possiede quindi un compatto invariante
K. In K troviamo i tre punti fissi delle tre contrazioni che definiscono F , vale
a dire (0, 0), (1, 1) e ( 12 , 0). Come nel caso precedente, la situazione è però
molto più complessa. Ad esempio, la diagonale D del quadrato è sicuramente
contenuta in K, dato che, definendo D1 e D2 come prima, si ha
F (D) = F1 (D) ∪ F2 (D) ∪ F3 (D) = D1 ∪ D2 ∪ D3 = D ∪ D3 ,
dove
D3 = {(x, y) ∈ R2 : 0 ≤ y = x −
1
2
≤ 12 } .
Pertanto, D ⊂ F (D) = F (1) (D), da cui segue D ⊂ F (n) (D) per ogni n. Per il
Lemma 2.20, D è un sottoinsieme dell’insieme invariante K. Non si ha, però,
D = K. Infatti, essendo F 1 (D) = D ∪ D3 , abbiamo
F (2) (D) = F (F (1) (D)) = F (D ∪ D3 ) = D ∪ D3 ∪ F (D3 ) ,
da cui
F (3) (D) = F (F (2) (D)) = F (D ∪ D3 ∪ F (D3 )) = D ∪ D3 ∪ F (D3 ) ∪ F (2) (D3 ) ,
e, iterando,
F
(n)
(D) = D ∪ D3 ∪
n−1
[
F (i) (D3 ) .
i=1
(n)
Pertanto, D3 è contenuto in F (D) per ogni n maggiore di 1, e quindi D3
è contenuto in K; ed anche F (D3 ) è contenuto in F (n) (D) per ogni n ≥ 2, e
quindi è in K; ed anche F (2) (D3 ) . . .
Se ci facciamo aiutare dal caso, e scegliamo f1 , f2 o f3 a seconda se otteniamo {1, 2}, {3, 4} o {5, 6} lanciando un dado (volendo, si può ricorrere ad
una moneta da 3D, che come è noto ha altrettante facce), otteniamo la figura
seguente:
1. DA FUNZIONI SU X A FUNZIONI SU K(X)
39
L’insieme K approssimato da 500 scelte casuali di f1 , f2 e f3
Disegnando un po’ meglio, ovvero disegnando F (6) ( ), dove
rettangolo di vertici (0, 0), (1, 0) e (1, 1), troviamo:
F (6) ( )
è il triangolo
40
3. SISTEMI DI FUNZIONI ITERATE
L’insieme K limite (della cui complessità la figura qui sopra è solo una
pallida imitazione) viene detto triangolo di Sierpinski. Da ora in poi,
invece di chiamarlo K, lo chiameremo .
Una versione “più ordinata” del triangolo di Sierpinski è l’insieme ,
ottenuto come insieme invariante delle tre contrazioni
f1 (x, y) = ( x2 , y2 ) ,
f2 (x, y) = f1 (x, y) + ( 12 ,
√
3
),
2
f3 (x, y) = f1 (x, y) + (1, 0) ,
√
a partire dal triangolo equilatero
di vertici (0, 0), (1, 0) e ( 12 , 23 ). Ecco il
disegno della quinta iterata, colorando in rosso l’immagine di tramite f1 , in
blu l’immagine di tramite f2 , ed in verde l’immagine di tramite f3 .
F (5) ( )
Esempio 3.5. A questo punto, complichiamo ulteriormente la faccenda
aggiungendo una quarta trasformazione:
f1 (x, y) = ( x2 , y2 ) ,
f2 (x, y) = f1 (x, y) + ( 21 , 12 ) ,
f3 (x, y) = f1 (x, y) + ( 21 , 0) , f4 (x, y) = f1 (x, y) + (0, 21 ) .
Come al solito, facciamo partire la macchina dell’iterazione casuale, questa
volta usando un dado da 4 (questi esistono!), e lanciandolo 1000 volte:
2. SISTEMI DI FUNZIONI ITERATE
41
L’insieme K approssimato da 1000 scelte casuali di f1 , f2 , f3 e f4
Che cosa succede? Perché non si forma un insieme “bello”, ma solo un
banalissimo quadrato? La risposta è semplice: se chiamiamo Q il quadrato
[0, 1] × [0, 1], allora
F1 (Q) = [0, 21 ] × [0, 12 ] , F2 (Q) = [ 12 , 1] × [ 21 , 1] ,
F3 (Q) = [ 12 , 1] × [0, 12 ] , F4 (Q) = [0, 21 ] × [ 12 , 1] ,
e quindi F (1) (Q) = Q! In altre parole, Q è l’insieme invariante di F : aggiungendo una contrazione in più, abbiamo “distrutto” la complessità di , e
siamo ripiombati nella monotonia delle figure geometriche a noi note.
Dopo tanti esempi, è venuto il momento di dare un po’ di rigorosità a
quello che abbiamo fatto.
2. Sistemi di funzioni iterate
Definizione 3.6. Sia (X, d) uno spazio metrico completo. Un sistema
di funzioni iterate (detto anche IFS, iterated function system) su X è un
insieme F = {f1 , . . . , fm } di contrazioni definite su X. Dato un sistema di
42
3. SISTEMI DI FUNZIONI ITERATE
funzioni iterate, e definita F da K(X) in sé come
F (K) =
m
[
Fi (K) ,
i=1
l’insieme invariante K di F viene detto attrattore del sistema di funzioni
iterate.
Pertanto,
è l’attrattore del sistema di funzioni iterate definito da
f1 (x, y) = ( x2 , y2 ) ,
f2 (x, y) = f1 (x, y) + ( 12 ,
√
3
),
2
f3 (x, y) = f1 (x, y) + (1, 0) ,
mentre la diagonale del quadrato Q = [0, 1] × [0, 1] è l’attrattore dell’IFS
definito da
f1 (x, y) = ( x2 , y2 ) ,
f2 (x, y) = f1 (x, y) + ( 21 , 12 ) .
Cambiando le contrazioni, cambia l’attrattore, e chiaramente si perdono le
proprietà di simmetria di oggetti come la diagonale, o : ad esempio, se
consideriamo le quattro contrazioni
1
1
x−y
−5x − 2y + 3
f1 (x, y) =
, f2 (x, y) =
,
7y + 4
10 5x + 3y
10
1
1
6x − 2
x − 7y + 9
, f4 (x, y) =
,
f3 (x, y) =
10 −3x − 4y + 6
10 x + 2y − 3
e iteriamo cinque volte a partire dal quadrato unitario, troviamo
F (5) ( )
che è meno gradevole a vedersi di . La cosa interessante è che le quattro “parti”, colorate in rosso, blu, verde e ciano, sono ottenibili una dall’altra tramite
una trasformazione rigida. In altre parole, l’insieme K è unione di quattro
parti diverse (nel caso di
le tre parti erano uguali a meno di traslazioni)
ognuna delle quali può essere trasformata nell’altra mediante un movimento
rigido del piano.
3. IL TEOREMA DEL COLLAGE
43
– Esercizio 3.7. Sapreste scrivere esplicitamente la trasformazione
che porta la parte ciano nella parte blu?
Definizione 3.8. Un insieme K in K(X) si dice autosimilare se esistono
m trasformazioni f1 , . . ., fm di X in sé tali che
K = f1 (K) ∪ . . . ∪ fm (K) .
Chiaramente ogni attrattore di un IFS è, per definizione, un insieme autosimilare.
3. Il teorema del collage
Supponiamo ora di aver sognato un oggetto meraviglioso: una scacchiera
quattro per quattro, in cui ogni casella nera era — a sua volta — fatta da una
scacchiera quattro per quattro, in cui ogni casella nera era — a sua volta — fatta da una scacchiera. . .. Risvegliatici da sonni agitati, e forti della definizione
di autosimilarità, ci siamo resi conto di aver sognato un insieme autosimilare,
uguale all’unione di otto copie ridotte di se stesso, disposte simmetricamente
“a scacchiera”. Pensiamo (crediamo, o speriamo) di aver sognato l’attrattore
di un IFS. Già, ma di quale? Quali e quante sono le contrazioni che l’hanno
creato (ammesso che l’abbiano creato!)? Abbiamo sotto mano il disegno che
— ancora semiaddormentati — abbiamo buttato giù in fretta e furia:
Sarà sufficiente scrivere le otto contrazioni che prendono il quadrato unitario
Q = [0, 1] × [0, 1] e lo “riducono” negli otto quadratini che formano il primo
livello della scacchiera? Armati di carta e penna, scriviamo le otto funzioni
f1 (x, y) = ( x4 , y4 ) ,
f2 (x, y) = f1 (x, y) + ( 21 , 0) ,
f3 (x, y) = f1 (x, y) + ( 41 , 14 ) , f4 (x, y) = f1 (x, y) + ( 43 , 14 ) ,
f5 (x, y) = f1 (x, y) + (0, 12 ) , f7 (x, y) = f1 (x, y) + ( 21 , 12 ) ,
f6 (x, y) = f1 (x, y) + ( 41 , 32 ) , f8 (x, y) = f1 (x, y) + ( 43 , 34 ) ,
44
3. SISTEMI DI FUNZIONI ITERATE
e vediamo cosa succede disegnando le prime quattro iterazioni del quadrato
Q, ovvero F (4) ( ):
F (4) ( )
Ha funzionato! Siamo contenti, ma ci viene un dubbio: abbiamo solo disegnato alcune delle iterazioni (le prime quattro), e sono “pochine” per sapere
se abbiamo costruito le cose in maniera corretta. Avremmo bisogno di un
risultato teorico che ci garantisca che quello che abbiamo fatto (la scacchiera
che avevamo immaginato era uguale ad otto copie riscalate di se stessa; abbiamo scritto le otto contrazioni; il disegno che abbiamo ottenuto è una buona
approssimazione dell’attrattore) ha senso.
Teorema 3.9. Sia (X, d) uno spazio metrico completo, e sia assegnato
F = {f1 , . . . , fm } un sistema di funzioni iterate su X di fattore di contrazione
L < 1. Sia ε ≥ 0, e sia H in K(X) tale che
h(F (H), H) < ε .
Detto K l’attrattore di F, si ha allora
h(K, H) <
ε
.
1−L
Dimostrazione. È una semplice applicazione della dimostrazione del
teorema delle contrazioni: partendo da K0 = H, e ripetendo la dimostrazione,
3. IL TEOREMA DEL COLLAGE
45
si ha
h(Kn+1 , Kn ) ≤ Ln h(K1 , K0 ) = Ln h(F (H), H) < Ln ε ,
da cui
h(Kn , H) ≤
n−1
X
h(Kj+1 , Kj ) <
j=0
n−1
X
j=0
Lj ε = ε
ε
1 − Ln
<
.
1−L
1−L
Ricordando che Kn converge a K nella distanza h, e che la funzione h(·, H) è
continua (per l’Esercizio 1.15), si ha la tesi passando al limite.
Le applicazioni del teorema precedente (detto teorema del Collage) sono
due. Se ε = 0, allora h(K, H) = 0, e quindi l’attrattore dell’IFS è proprio
H – che sarà quindi ben approssimato dalle iterazioni dell’IFS a partire da
qualsiasi insieme del piano.
Ad esempio, consideriamo la cosiddetta curva di von Koch, che viene
costruita nel modo seguente: dato il segmento [0, 1], si levi il terzo centrale
e lo si sostituisca con due segmenti di lunghezza 13 che formino un triangolo
equilatero. Si ripeta la procedura per ognuno dei quattro segmenti cosı̀ ottenuti, e cosı̀ via. La curva limite (simile ad un fiocco di neve) è la curva di von
Koch.
La procedura di costruzione della curva di von Koch
È allora chiaro (dalla procedura), che la curva di von Koch è uguale all’unione
(esatta) di quattro copie di se stessa, riscalate di un fattore un terzo. Due
copie (la prima e l’ultima) sono traslate, mentre le altre due sono ruotate (di
π
e − π3 rispettivamente) e poi traslate. In simboli
3
f1 (x, y) = ( x3 , y3 ) ,
f2 (x, y) = ( x3 + 32 , y3 ) ,
e
√
f3 (x, y) = ( x−6 3y + 13 ,
Partendo da K0 =
zione della curva.
√
3x+y
),
6
√
√
f4 (x, y) = ( x+6 3y + 12 , −
3x+y
6
√
+
3
)
6
, ed iterando sei volte, otteniamo una buona approssima-
46
3. SISTEMI DI FUNZIONI ITERATE
Un’approssimazione della curva di Von Koch: F (6) ( )
Se nel teorema del Collage si ha ε > 0, e costruiamo un IFS ed un insieme
H che è “vicino” (nel senso della distanza di Hausdorff) alla propria prima immagine tramite l’IFS, allora l’insieme H è una buona approssimazione
dell’attrattore dell’IFS.
Quest’ultima applicazione ci fornisce una ricetta per trovare un sistema
di funzioni iterate che approssimi un insieme autosimilare non perfettamente
“regolare” (come lo sono , o la scacchiera). Identifichiamo, anche approssimativamente, le parti autosimili, e scriviamo le contrazioni che portano tutto
l’insieme nelle varie sotto-parti. Se in questa maniera “copriamo” quasi tutto
l’insieme (a meno di una distanza di Hausdorff pari a ε), allora l’attrattore dell’IFS che abbiamo scritto, attrattore che sappiamo disegnare con un computer,
approssima l’insieme autosimile da cui eravamo partiti.
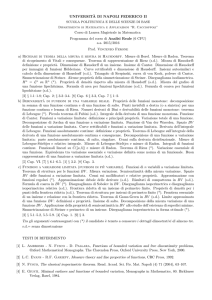
Ad esempio, supponiamo di voler disegnare la struttura dei rami un albero
(bidimensionale. . .) come attrattore di un IFS. La struttura autosimilare è
abbastanza evidente: dal tronco si dipartono (a diverse altezze e a diverse
inclinazioni) rami verso destra e verso sinistra, ed ognuno dei due rami ha, a
sua volta, dei rametti (a destra ed a sinistra), che hanno sotto-rametti, e cosı̀
via. Pertanto, ogni ramo è una copia in miniatura di tutto l’albero.
3. IL TEOREMA DEL COLLAGE
47
La struttura dei rami di un albero (più o meno. . .)
Cosa notiamo dal disegno? Che il primo ramo di sinistra è lungo circa un terzo
di tutto l’albero, è ruotato (rispetto al tronco) di circa sessanta, sessantacinque
gradi, ed è traslato verso l’alto di un quinto dell’albero; che il primo ramo di
destra è lungo circa un quarto di tutto l’albero, che è ruotato (rispetto al
tronco) di meno quarantacinque gradi (o giù di lı̀), ed è traslato verso l’alto
di circa un quarto dell’albero; ed infine che la parte di albero dai secondi rami
in su è una copia ridotta di circa un quarto dell’albero, traslata verso l’alto di
circa un terzo della lunghezza dell’albero. In definitiva, la situazione è questa:
L’albero come unione di copie di se stesso
Come si vede (un po’ barando, le immagini incollate sono opache. . .) le tre
copie ridotte dell’albero lo ricoprono più o meno interamente: spuntano solo
dei rametti qua e là: per il teorema del Collage, l’attrattore dell’IFS generato
dalle tre contrazioni che abbiamo descritto è abbastanza vicino (nel senso della
misura di Hausdorff) all’albero che abbiamo disegnato. Passando dalle parole
ai numeri, e ricordando che la matrice che descrive una rotazione di un angolo
θ (in senso antiorario) è data da
cos(θ) −sen(θ)
M=
,
sen(θ) cos(θ)
e supponendo che l’albero sia alto 1, abbiamo
√
1/6 − 3/6
√
f1 (x, y) =
3/6
1/6
√
√
2/8 √2/8
√
f2 (x, y) =
− 2/8
2/8
x
y
x
y
+
+
0
1/5
0
1/4
,
,
48
3. SISTEMI DI FUNZIONI ITERATE
e
f3 (x, y) =
3/4 0
0 3/4
x
y
+
0
1/3
.
Se proviamo a disegnare l’attrattore, otteniamo però un risultato non soddisfacente:
F (5) ( )
Cosa manca? Mancano sia il tronco che i rami (la sostanza stessa dell’albero,
insomma)! C’è però un problema: che tronco e rami, presi singolarmente, sono
simili tra loro (un ramo è una versione ridotta del tronco), ma non sono simili
all’albero. A meno che non si decida di prendere l’albero e schiacciarlo lungo la
direzione dell’asse x, rendendolo “magrissimo”, e quindi simile ad un segmento
(che possiamo pensare come schematizzazione di un tronco). Dobbiamo allora
aggiungere una quarta contrazione:
1/1000
0
x
0
f4 (x, y) =
+
,
0
999/1000
y
0
che riduce le dimensioni un una sola direzione, lasciando l’altra (quasi) indisturbata.
F (5) ( )
Un analogo risultato otteniamo se lanciamo 2500 volte un dado da quattro,
scegliendo ogni volta quale delle quattro contrazioni applicare.
3. IL TEOREMA DEL COLLAGE
49
F (5) ( )
A questo punto, possiamo sbizzarrirci, ed introdurre dei parametri, come
segue.
εL
θ
σ
L
γL
αL
δL
βL
Dobbiamo quindi scrivere, oltre alla quarta contrazione che porta l’albero nel
tronco, e che rimane invariata, le tre contrazioni (supponendo L = 1):
α cos(θ) −α sen(θ)
x
0
f1 (x, y) =
+
,
α sen(θ) α cos(θ)
y
β
f2 (x, y) =
γ cos(σ) γ sen(σ)
−γ sen(σ) γ cos(σ)
x
y
+
0
δ
,
e
f3 (x, y) =
ε 0
0 ε
x
y
+
0
1−ε
,
e poi provare diversi valori dei parametri α, β, γ, δ, ε, θ e σ. Se indichiamo
con T (α, β, γ, δ, ε, θ, σ) è l’attrattore dell’IFS, ecco alcuni casi.
50
3. SISTEMI DI FUNZIONI ITERATE
T ( 12 , 51 , 12 , 15 , 45 , π3 , π3 )
3 4 π π
, 5, 3 , 4 )
T ( 35 , 15 , 25 , 10
9 1 1 2 1 π π
T ( 10
, 5, 5, 5, 2, 2 , 4 )
4. SISTEMI DI FUNZIONI ITERATE CON PROBABILITà
51
4. Sistemi di funzioni iterate con probabilità
Nelle pagine precedenti abbiamo visto due modi di “disegnare” l’attrattore
dell’IFS: la prima approssimandolo con l’iterata n-sima di un sottoinsieme di
R2 (ad esempio un quadrato, o un triangolo), la seconda partendo da un punto
qualsiasi del piano, scegliendo casualmente una delle m contrazioni del sistema
di funzioni iterato, calcolando l’immagine del punto tramite la contrazione
scelta, e ripetendo questa operazione (a partire dal punto calcolato) per un
numero sufficientemente elevato di volte.
Mentre è chiaro dalla definizione stessa di attrattore K come limite delle
iterate che il primo sistema “funziona”, non è immediatamente evidente perché
funzioni il secondo metodo. Per le iterate n-sime abbiamo infatti immagini di
insiemi “pieni” (come quadrati o triangoli), mentre il metodo probabilistico
calcola immagini di punti (che tutto sono tranne che “pieni”). È vero però che
— dal punto di vista della rappresentazione grafica al computer — dopo un
certo numero di iterazioni i “punti” (pixel) dello schermo non sono meno “pieni” dell’immagine di un quadrato: se, ad esempio, prendiamo l’IFS che genera
, e partiamo dal quadrato di lato 1, dopo n passaggi le immagini hanno lato
2−n , ed il quadrato è diventato poco più di un punto sullo schermo. E, viceversa, nei disegni “casuali” che abbiamo fatto, ogni punto era rappresentato
da un cerchietto (“pieno”, dunque).
Sistemato il problema della non differente dimensione tra quadrati e punti, rimane però da capire per quale motivo scegliendo in maniera casuale la contrazione da applicare ad ogni passo otteniamo un’approssimazione
dell’attrattore.
Ricordiamo che se {f1 , . . . , fm } è il sistema di funzioni iterate, l’attrattore
K è ottenuto come limite delle iterazioni a partire da qualsiasi compatto K0
iniziale. Se, in particolare, scegliamo K0 = {x0 }, ovvero un punto, allora K1
è l’insieme delle immagini di x0 tramite le funzioni fi dell’IFS, K2 è l’insieme
delle immagini di questi punti, e cosı̀ via. Se i punti sono tutti a due a due
diversi, Kn sarà composto da mn punti, ognuno dei quali è della forma
x = fjn ◦ fjn−1 ◦ · · · ◦ fj1 (x0 ) ,
con j1 , . . ., jn interi che variano tra 1 ed m. La successione {xn } di punti
casuali che costruiamo scegliendo al passo n-simo una delle contrazioni fin e
calcolando xn = fin (xn−1 ) (partendo da x0 ), ha quindi la proprietà che xn
appartiene a Kn = F (n) ({x0 }). In altre parole, scegliamo casualmente uno
degli mn punti che compongono Kn .
Perché questa scelta va bene? Se rileggiamo la dimostrazione del Teorema delle contrazioni (si veda l’Osservazione 1.27, e la formula (1.1)), abbiaθn
h(K1 , K0 ).
mo (chiamando θ il fattore di contrazione di F ) h(Kn , K) ≤ 1−θ
52
3. SISTEMI DI FUNZIONI ITERATE
Ricordando la definizione di distanza di Hausdorff, si ha allora
θn
h(K1 , K0 ) ,
1−θ
d(Kn , K) ≤
e quindi
max{d(x, K), x ∈ Kn } ≤
θn
h(K1 , K0 ) .
1−θ
Essendo xn in Kn , si ha allora
d(xn , K) ≤
θn
h(K1 , K0 ) ;
1−θ
siccome d(x, K) è un minimo, esiste yn in K tale che
d(xn , yn ) ≤
θn
h(K1 , K0 ) .
1−θ
Se n è molto grande, abbiamo cosı̀ che il punto “casuale” xn è vicino ad almeno
un punto di K, ed è talmente vicino da risultarne indistinguibile una volta
che xn sia rappresentato da un computer, e quindi da un pixel o, come nel
nostro caso, da un cerchietto. In sostanza, con la scelta “casuale” del punto da
disegnare, anche se non stiamo disegnando esattamente i punti dell’attrattore
K, li stiamo comunque approssimando “bene”.
Ovviamente, abbiamo bisogno che la scelta della contrazione da applicare
sia veramente “casuale” (vale a dire: se sono m contrazioni, su n iterazioni
n
ognuna deve essere scelta in media m
volte). Se cosı̀ non è, rischiamo di non
ottenere una rappresentazione dell’attrattore: se ad esempio scegliamo sempre
la prima contrazione f1 , è chiaro che stiamo approssimando solo l’unico punto
fisso di f1 .
Quello che possiamo fare, però, è decidere che alcune contrazioni hanno
maggiore probabilità di essere scelte. Ad esempio, per
potremmo decidere
di scegliere f1 due volte più spesso di f2 e di f3 . Una tale scelta porta evidentemente ad un aumento della densità dei punti iterati nella regione f1 (K),
raddoppiandola rispetto a quella dei punti nelle regioni f2 (K) e f3 (K). Possiamo cosı̀ generare dei sistemi di funzioni iterate con probabilità, che
sono della forma {(f1 , p1 ), . . . , (fm , pm )} con fi una contrazione per ogni i e
m
X
pi = 1 .
i=1
Scegliendo opportunamente i valori di delle proabilità, e colorando opportunamente i punti, si possono ottenere effetti di colore differenti sulle rappresentazioni al computer degli attrattori di IFS.
4. SISTEMI DI FUNZIONI ITERATE CON PROBABILITà
Il triangolo di Sierpinski con p1 = 12 , p2 =
1
4
Il quadrato con densità p1 = 49 , p2 = 29 , p3 =
Una felce
e p3 =
2
9
53
1
4
e p4 =
1
9
CAPITOLO 4
Misura e dimensione di Hausdorff
Che vuol dire “dimensione di un insieme”? Che cosa intendiamo quando diciamo che un segmento “ha dimensione uno”? O che un quadrato “ha
dimensione due”? Intuitivamente, diciamo che un segmento ha dimensione
uno perché ha solo la lunghezza, e non ha né larghezza, né la profondità.
Analogamente, un quadrato ha dimensione due perché è lungo, largo, ma non
“spesso”. Mentre, invece, un cubo ha tre dimensioni perché si “estende” in tre
direzioni. La cosa che — forse — non si nota quando si dice che un segmento
ha dimensione uno, è che non si dice dove “vive” il segmento. Per esempio,
non si specifica se sia un sottoinsieme di R, o di R2 , o di RN con N qualsiasi.
Un segmento ha dimensione uno sia se è [1, 1], sia se è [−1, 1] × {0}, sia se
è [−1, 1] × {(0, . . . , 0). Analogamente, un quadrato ha dimensione due anche se “vive” in un piano di R3 , o in un iperpiano di RN , e cosı̀ un cubo ha
dimensione tre anche se è in R4 , o in R5 .
In altre parole, l’idea che abbiamo di “dimensione”, l’idea intuitiva di
“dimensione”, fa sı̀ che essa sia una caratteristica “intrinseca” dell’oggetto che
stiamo considerando, indipendentemente da “dove” lo stiamo considerando.
Quello che faremo in seguito sarà di dare alcuni modi per calcolare — per
ogni sottoinsieme di RN — un numero s (che potrà essere anche non intero) e
che sarà indipendente dalla dimensione N dello spazio ambiente, ma dipenderà
solo dall’insieme che stiamo considerando.
1. La misura di Hausdorff
Da ora in poi lavoreremo nello spazio metrico (X, d) = (RN , d2 ), ovvero in
RN dotato della metrica euclidea.
Definizione 4.1. Sia A un sottoinsieme di RN . Il diametro di A è
definito come
diam(A) = sup{d2 (x, y), x, y ∈ A} .
Si vede abbastanza facilmente che se diam(A) = r < +∞, allora A ⊂ Br (x0 ),
qualsiasi sia x0 in A, e quindi A è limitato. Si vede altrettanto facilmente
che se A = Br (x0 ), allora diam(A) = 2r (cosicché il nome di “diametro” è
giustificato).
– Esercizio 4.2. Si giustifichino le ultime due affermazioni.
55
56
4. MISURA E DIMENSIONE DI HAUSDORFF
Definizione 4.3. Dato A sottoinsieme di RN e δ > 0, un δ-ricoprimento
di E è una famiglia {Ei }i∈N , al più numerabile, tale che
[
diam(Ei ) ≤ δ , e A ⊆
Ei .
i∈N
È chiaro che se {Ei } è un δ-ricoprimento di A, allora {Ei } è un δ 0 -ricoprimento
di A per ogni δ 0 > δ. In altre parole, più è piccolo δ, meno sono i δ-ricoprimenti
di A.
Definizione 4.4. Sia s ≥ 0 un numero reale. Definiamo α(0) = 1 e
s
π2
α(s) = s
,
Γ( 2 + 1)
dove
Z
Γ(t) =
∀s > 0 ,
+∞
e−x xt−1 dx ,
0
è la funzione gamma di Eulero.
Riguardo alla funzione gamma, osserviamo che
Z +∞
Z +∞ −x
√
e
2
x = y2
1
√ dx =
Γ( 2 ) =
=2
e−y dy = π ,
dx = 2y dy
x
0
0
e che
Z
Γ(1) =
0
+∞
x=+∞
e−x dx = −e−x x=0 = 1 .
Inoltre, integrando per parti, e se t ≥ 0,
Z +∞
du = e−x
v = xt
−x t
Γ(t + 1) =
e x dx =
u = −e−x dv = t xt−1
0
Z +∞
x=+∞
e−x xt−1 dx = t Γ(t) ,
= −t e−x xt x=0 + t
0
che, combinato con Γ(1) = 1, implica che Γ(n) = (n − 1)! per ogni n in N,
cosicché la funzione Γ interpola il fattoriale.
Quanto ad α(s), si ha
√
√
π
π
α(1) = 3 = 1 1 = 2 ,
Γ( 2 )
Γ( 2 )
2
e
π
α(2) =
= π,
Γ(2)
e
√
√
√
π π
π π
π π
4
α(3) =
5 = 3
3 = 3
1 = π,
3
Γ( 2 )
Γ( 2 )
Γ( 2 )
2
4
1. LA MISURA DI HAUSDORFF
57
cosicché α(s) è, almeno per s = 1, s = 2 ed s = 3, la lunghezza, l’area ed il
volume, di B1 (0) in R, R2 ed R3 rispettivamente. Si può dimostrare che, in
generale, α(N ) è la “misura N -dimensionale” della sfera B1 (0) in RN .
Definizione 4.5. Sia s ≥ 0, sia A un sottoinsieme di RN , e sia δ > 0.
Definiamo
(
)
s
X
diam(E
)
i
Hδs (A) = inf
α(s)
, {Ei } δ-ricoprimento di A .
2
i∈N
Se A è fissato, e δ < δ 0 , si vede facilmente che Hδs0 (A) ≤ Hδs (A), e quindi —
come funzione di δ — Hδs (A) è decrescente. Esiste allora
Hs (A) = lim+ Hδs (A) = sup{Hδs (A), δ > 0} .
δ→0
s
Si noti che si ha 0 ≤ H (A) ≤ +∞. Dato A sottoinsieme di RN , e s ≥ 0, la
quantità Hs (A) si dice misura (esterna) di Hausdorff s-dimensionale di
A.
Il seguente teorema raccoglie alcune delle proprietà della misura di Hausdorff.
Teorema 4.6. La misura di Hausdorff è tale che:
(1) Se A ⊆ B, allora Hs (A) ≤ Hs (B).
(2) Se s = 0, allora
#(A) se A è finito,
0
H (A) =
+∞ se A non è finito.
Il numero #(A) è, per definizione, il numero degli elementi di A.
(3) Se s > N , ed A è limitato, allora Hs (A) = 0 per ogni sottoinsieme A
di RN .
(4) Se s = 1 e A è un segmento contenuto in RN , allora H1 (A) è la
lunghezza del segmento. Analogamente, H2 (A) è l’area di A se A è
una “figura piana” in RN , e H3 (A) è il volume di A se A è un “solido”
tridimensionale in RN .
Dimostrazione. Dimostriamo solo le prime tre affermazioni (rimandando al libro di Ziemer citato nell’Introduzione per l’ultima). Per quanto riguarda (1), è chiaro che se {Ei } è un δ-ricoprimento di B, allora è anche un
δ-ricoprimento di A. Si ha allora, per ogni δ > 0, e per definizione di Hs (B),
Hδs (A) ≤ Hδs (B) ≤ Hs (B) ,
e quindi la tesi passando al limite su δ tendente a zero da destra nel primo
membro.
Per (2), se s = 0, dalla definizione si ha che
Hδ0 (A) = inf {#{Ei }, {Ei } δ-ricoprimento di A} .
58
4. MISURA E DIMENSIONE DI HAUSDORFF
Se A = {x1 , . . . , xm }, allora {Ei } = {xi } è un δ-ricoprimento di A per ogni
δ > 0, cosicché Hδ0 (A) ≤ m per ogni δ > 0. D’altra parte, se
δ = min{d2 (xi , xj ), i 6= j = 1, . . . , m} ,
allora ogni δ-ricoprimento di A deve contenere almeno m insiemi, e quindi
Hδ0 (A) ≥ m per ogni δ ≤ δ.
x2
x3
δ
x1
x5
x4
Ogni δ-ricoprimento contiene almeno m insiemi.
Si ha allora che Hδ0 (A) = m per ogni δ ≤ δ, e quindi H0 (A) = m. Se,
invece, A contiene infiniti punti, allora A contiene almeno una successione
{yn } costituita da infiniti punti distinti. Ma allora, per (1),
H0 (A) ≥ H0 ({y1 , . . . , yn }) = n ,
da cui H0 (A) = +∞ per l’arbitrarietà di n.
Per dimostrare la (3), iniziamo a calcolare Hs (Q1 ), dove Q1 = [0, 1]N .
Fissato n in N, ricopriamo Q1 con N n cubetti Qm1 ,...,mN di lato n1 :
1 +1
Qm1 ,...,mN = mN1 , mN
× · · · × mNN , mNN+1 ,
√
con m1 , . . ., mN interi compresi tra 0 e N −1. Essendo diam(Q
m1 ,...,mN ) =
√
N
N
gli n cubetti sono un δn -ricoprimento di Q, con δn = n . Pertanto,
√ s
nN √ s
X
N
N
1
s
.
0 ≤ Hδn (Q1 ) ≤ α(s)
= α(s)
s−N
2n
2
n
i=1
N
,
n
Facendo tendere n ad infinito, osservando che δn tende a zero, ed usando
l’ipotesi s > N , si ha
0 ≤ Hs (Q1 ) ≤ 0 ,
1. LA MISURA DI HAUSDORFF
59
e quindi Hs (Q1 ) = 0. Analogamente, si ha Hs (QR ) = 0 per ogni cubo QR di
lato R > 0. Se A è limitato, allora A è contenuto in BR (0) per un opportuno
R. Essendo BR (0) un sottoinsieme del cubo Q2R centrato nell’origine e lato
2R, si ha (per (1)),
0 = Hs (A) ≤ Hs (BR (0)) ≤ Hs (Q2R ) = 0 ,
e quindi Hs (A) = 0, come volevasi dimostrare.
Abbiamo chiamato la funzione di insieme Hs (definita sulle parti di RN ),
“misura esterna”.
Definizione 4.7. Una funzione di insieme µ∗ , definita sull’insieme P(X)
delle parti di X, si dice misura esterna se
(1) µ∗ (E) ≥ 0 per ogni E in P(X), e µ∗ (∅) = 0;
(2) per ogni famiglia al più numerabile {Ei } contenuta in P(X), si ha
+∞
+∞
[ X
∗
µ
Ei ≤
µ∗ (Ei ) .
i=1
i=1
∗
Data una misura esterna µ , un insieme E di P(X) si dice misurabile secondo
µ∗ se si ha
µ∗ (A) = µ∗ (A ∩ E) + µ∗ (A ∩ E c ) ,
∀A ∈ P(X) .
∗
Data una misura esterna µ , allora
Aµ∗ = {E ∈ P(X) : E è µ∗ -misurabile}
è un σ-algebra (ovvero, una famiglia di insiemi che contiene l’insieme vuoto,
ed è chiusa rispetto al complementare e alle unioni numerabili). La restrizione
di µ∗ a Aµ∗ viene detta misura, ed è tale che
+∞
+∞
[ X
∗
µ
Ei =
µ∗ (Ei ) ,
i=1
i=1
per ogni famiglia {Ei } al più numerabile di insiemi disgiunti.
Esempio 4.8. La funzione di insieme Hs è — effettivamente — una misura
esterna. Se s è un numero intero, la restrizione di Hs agli insiemi Hs -misurabili
è la misura di Lebesgue s-dimensionale (con questa frase si precisa il senso della (4) del Teorema 4.6). Vediamo, nel caso particolare di H0 , che le proprietà
della misura esterna sono soddisfatte. Ovviamente, H0 (A) è positivo, e si annulla se A = ∅ (che non ha punti). Sia ora {Ei } una famiglia al più numerabile
di sottoinsiemi di RN . Se la serie
+∞
X
H0 (Ei )
i=1
60
4. MISURA E DIMENSIONE DI HAUSDORFF
diverge, non c’è nulla da dimostrare. Supponiamo pertanto che converga;
essendo H0 (Ei ) un numero intero per ogni i, l’unica possibilità è che H0 (Ei )
sia diverso da zero, e finito, solo per un numero finito di indici. Supponiamo
che gli insiemi ad avere misura H0 diversa da zero siano i primi n, cosicché
Ei = ∅ per ogni i > n. Ma allora l’unione degli Ei è un insieme finito, la cui
cardinalità è al più la somma delle cardinalità dei primi n insiemi (dato che
qualche punto può appartenere a più di uno degli Ei ). Come sono fatti gli
insiemi H0 -misurabili? Deve valere
H0 (A) = H0 (A ∩ E) + H0 (A ∩ E c ) ,
∀A ⊆ RN .
Essendo A = (A ∩ E) ∪ (A ∩ E c ), chiaramente si ha
H0 (A) ≤ H0 (A ∩ E) + H0 (A ∩ E c ) ,
e quindi non rimane che dimostrare la disuguaglianza inversa:
H0 (A) ≥ H0 (A ∩ E) + H0 (A ∩ E c ) .
Se H0 (A) = +∞, non c’è nulla da dimostrare. Supponiamo pertanto che A
sia finito. Ma allora sia A ∩ E che A ∩ E c sono insiemi finiti, e sono disgiunti,
cosicché la somma delle loro cardinalità è la cardinalità dell’unione, ovvero A.
Non avendo fatto alcuna ipotesi su E, ne segue che ogni sottoinsieme E di
RN è misurabile secondo H0 , e quindi che la σ-algebra AH0 non è altro che
P(RN ).
2. La dimensione di Hausdorff
Il seguente risultato permette di definire “intrinsecamente” la dimensione
di un insieme tramite la misura Hs .
Teorema 4.9. Sia A un sottoinsieme limitato di RN . Allora esiste un
unico numero reale s, con 0 ≤ s ≤ N tale che
0 se s > s,
s
H (A) =
+∞ se s < s.
Dimostrazione. Dimostriamo che se s ≥ 0 è tale che Hs (A) < +∞,
0
allora Hs (A) = 0 per ogni s0 > s. Sia dunque C = Hs (A), e sia s0 > s. Per
definizione,
C = lim+ Hδs (A) = sup{Hδs (A), δ > 0} .
δ→0
ha Hδs (A)
Essendo C < +∞, si
≤ C < +∞ per ogni δ > 0. Per definizione di
estremo inferiore, fissato ε > 0 esiste un δ-ricoprimento {Ei,ε } di A tale che
X diam(Ei ) s
0 ≤ α(s)
≤ Hδs (A) + ε ≤ C + ε .
2
i∈N
2. LA DIMENSIONE DI HAUSDORFF
61
Per tale ricoprimento si ha
0≤
X diam(Ei,ε ) s0
2
i∈N
"
0
s #
s −s
0
X
α(s ) δ
diam(Ei,ε )
α(s)
=
α(s) 2
2
s0 −si∈N
0
α(s ) δ
≤ (C + ε)
.
α(s) 2
0
Hδs (A) ≤ α(s0 )
ovvero,
0
0
0 ≤ Hδs (A) ≤ C δ s −s ,
per qualche costante C indipendente da δ. Facendo tendere δ a zero si trova
0
Hs (A) = 0, come volevasi dimostrare.
Per concludere la dimostrazione, definiamo
s = inf{s ≥ 0 : Hs (A) = 0} .
Osserviamo innanzitutto che l’estremo inferiore è ben definito dato per la (3)
del Teorema 4.6 si ha Hs (A) = 0 per ogni s > N , e che quindi 0 ≤ s ≤ N .
Inoltre, se s > s allora — per definizione di estremo inferiore — esiste s0
0
appartenente a [s, s] tale che Hs (A) = 0 < +∞. Per quanto dimostrato in
precedenza, Hs (A) = 0. Se, invece, s < s, e Hs (A) < +∞, allora (sempre
0
per quanto visto prima), Hs (A) = 0 per ogni s0 > s, e quindi per ogni s0
in (s, s), contraddicendo cosı̀ la definizione di estremo inferiore. Pertanto,
Hs (A) = +∞, e la dimostrazione del teorema è conclusa.
Osservazione 4.10. Osserviamo esplicitamente che se s ≥ 0 è tale che
0
Hs (A) > 0, allora Hs (A) = +∞ per ogni s0 < s. Infatti, se per assurdo
0
si avesse Hs (A) < +∞ per qualche s0 < s, allora (per la prima parte della
dimostrazione del teorema precedente) seguirebbe che Hs (A) = 0, il che non
è.
Definizione 4.11. Sia A un sottoinsieme di RN . Il numero reale s determinato dal teorema precedente viene detto dimensione di Hausdorff di A,
e si indica con
dimH (A) = s .
Osservazione 4.12. Se s = dimH (A), allora Hs (A) può essere qualsiasi
numero in [0, +∞), oppure più infinito. Ad esempio, se A = ∅ allora H0 (A) =
0, se A = [0, 1] allora H1 (A) = 1, mentre HN (RN ) = +∞. Se però un
sottoinsieme A di RN è tale che esiste s ≥ 0 per cui 0 < Hs (A) < +∞, allora
dimH (A) = s. Dal punto (4) del Teorema 4.6 segue allora che la dimensione
di Hausdorff di un segmento è 1, di una “figura piana” è 2, e di un “solido
tridimensionale” è 3.
62
4. MISURA E DIMENSIONE DI HAUSDORFF
Osservazione 4.13. Sia A ⊆ RN , e sia s = dimH (A) ≤ N . Sia M > N
e definiamo A0 = A × {0N +1 , . . . , 0M }. In altre parole, A0 è l’insieme A
“immerso” in RM . Dimostriamo che dimH (A0 ) = s, cosicché la dimensione di
Hausdorff di un insieme non dipende dallo spazio ambiente. Se s > s, si ha
Hs (A) = 0 (con ricoprimenti contenuti in RN ). Pertanto, per ogni δ > 0 si ha
Hδs (A) = 0, e quindi per ogni ε > 0 esiste un δ-ricoprimento {Ei,ε } (in RN ) di
A tale che
X diam(Ei,ε ) s
α(s)
≤ ε.
2
i∈N
0
0
Dal momento che {Ei,ε
}, con Ei,ε
= Ei,ε ×{0N +1 , . . . , 0M } è un δ-ricoprimento
0
M
0
), allora
di A in R (il diametro di Ei,ε è lo stesso di Ei,ε
0
X diam(Ei,ε
) s
α(s)
≤ ε,
2
i∈N
da cui segue Hδs (A0 ) = 0 (in RM ) e quindi Hs (A0 ) = 0. Pertanto, Hs (A0 ) = 0
per ogni s > s, e quindi dimH (A0 ) ≤ s. Se per assurdo fosse dimH (A0 ) < s,
0
0
allora esisterebbe s0 < s tale che Hs (A0 ) = 0. Pertanto, Hδs (A0 ) = 0 per ogni
0
δ > 0, e quindi per ogni ε > 0 esiste un δ-ricoprimento {Ei,ε
} di A0 tale che
0
0
X diam(Ei,ε
) s
0
α(s )
≤ ε.
2
i∈N
Scrivendo
(1)
(2)
(N )
(N +1)
0
Ei,ε
= Fi,ε × Fi,ε × · · · × Fi,ε × Fi,ε
(M )
× · · · × Fi,ε ,
si vede facilmente che {Ei,ε }, definito da
(1)
(2)
(N )
Ei,ε = Fi,ε × Fi,ε × · · · × Fi,ε ,
0
è un δ ricoprimento di A in RN , dato che diam(Ei,ε ) ≤ diam(Ei,ε
). Pertanto,
0
0
X diam(Ei,ε ) s0
X diam(Ei,ε
) s
0
0
α(s )
≤ α(s )
≤ ε,
2
2
i∈N
i∈N
0
0
da cui Hδs (A) = 0, e quindi Hs (A) = 0. Essendo s0 < dimH (A), si ha un
assurdo per definizione di dimH (A).
CAPITOLO 5
La dimensione degli attrattori degli IFS
In questo capitolo daremo un metodo per calcolare la dimensione di Hausdorff dei compatti autosimilari che abbiamo costruito nel Capitolo 3 come
attrattori di IFS.
1. La dimensione box counting
Sia A = [0, 1] il segmento unitario in R. Nel capitolo precedente, abbiamo
detto (non dimostrato. . .) che la dimensione di Hausdorff di A è 1, essendo
H1 (A) = 1 (si veda l’Osservazione 4.12). Di nuovo, che vuol dire “dimensione”? Diamo qui una seconda idea per misurare la dimensione di un insieme
(come vedremo, darà una stima “dall’alto” della dimensione di un insieme).
Sia allora n in N, e consideriamo un “ricoprimento” efficiente di A con segmenti di lunghezza n1 . “Efficiente” qui significa che nel ricoprire A si tenta
di ridurre al minimo le sovrapposizioni tra i vari segmenti. Ad esempio, se
consideriamo
[0, n1 ) , [ n1 , n2 ) , . . . [ n−2
, n−1
) , [ n−1
, 1] ,
n
n
n
è chiaro che il ricoprimento è disgiunto, e quindi la sovrapposizione tra i segmenti è vuota. Quanti segmenti sono stati necessari? Basta contarli: sono n.
Se, invece di considerare il segmento A = [0, 1] in R, consideriamo il segmento
A = [1, 2] × {1} in R2 , quanti quadratini di lato n1 servono per ricoprire A in
maniera efficiente? Anche in questo caso, si vede facilmente che sono necessari
n quadratini.
A
A
1
2
1
2
Per ricoprire A servono n quadrati
Se considerassimo A = [2, 3] × {0} × {1} in R3 , nuovamente servirebbero n
cubi di lato n1 per ricoprire efficientemente A. E se A = [0, 2]? In questo caso,
servono 2n segmenti (o quadrati, o cubi) di lato n1 . Se il segmento è lungo
L, servono ([L] + 1) n “oggetti” di lato n1 per ricoprirlo efficientemente ([x] è
63
64
5. LA DIMENSIONE DEGLI ATTRATTORI DEGLI IFS
la parte intera di x). Cosa “non cambia” cambiando lo spazio in cui vive il
segmento, o la sua lunghezza? In ogni caso, serve una quantità proporzionale
ad n di oggetti di lato n1 (la costante di proporzionalità dipendendo dalla
lunghezza del segmento) per un ricoprimento efficiente.
Se, invece di ricoprire un segmento con “oggetti”, ricopriamo un quadrato
in R2 , ad esempio [1, 2] × [1, 2], quanti “oggetti” servono? È presto detto: se
il lato del quadratino è n1 , servono n2 quadratini, o n2 cubetti.
2
2
1
1
1
2
Per ricoprire un quadrato servono
1
n2
2
quadrati
Se il quadrato è [0, 2] × [2, 4], servono 4n2 “oggetti” per un ricoprimento efficiente. In generale, serve una quantità proporzionale ad n2 di oggetti di lato
1
(la costante di proporzionalità dipendendo dall’area del quadrato) per un
n
ricoprimento efficiente di un quadrato (o di un rettangolo, o di un triangolo).
Se ricoprissimo cubi con “oggetti” di lato n1 , troveremmo che serve una
quantità proporzionale ad n3 di oggetti (la costante di proporzionalità
dipendendo dal volume del cubo) per un ricoprimento efficiente.
A questo punto è chiaro cosa sta accadendo: un segmento, che ha dimensione 1, necessità di (un numero proporzionale a) n 1 oggetti; un quadrato,
che ha dimensione 2, necessita di (un numero proporzionale a) n 2 oggetti; un cubo, che ha dimensione 3, necessita di (un numero proporzionale a)
n 3 oggetti. In sostanza, l’esponente cui viene elevato n è la dimensione del
segmento (o del quadrato, o del cubo).
Come possiamo rendere rigorosa questa “tecnica” di calcolo della dimensione?
Definizione 5.1. Sia A un sottoinsieme limitato di RN e sia δ > 0.
Definiamo
N (A, δ) = min{m ∈ N : A può essere ricoperto da m ipercubi di lato δ} .
Chiaramente N (A, δ) è ben definito: essendo A limitato, A è contenuto in un
ipercubo di lato sufficientemente grande, e gli ipercubi sono ricopribili da un
numero finito di ipercubi di lato δ; dunque, esistono ricoprimenti finiti di A
fatti da ipercubi di lato δ, cosicché l’insieme che serve a definire N (A, δ) non
è vuoto, e quindi ha minimo perché è un sottoinsieme di N.
1. LA DIMENSIONE BOX COUNTING
65
Dato A sottoinsieme di RN , definiamo la dimensione box counting di
A come il numero
dimbc (A) = lim+ −
δ→0
log(N (A, δ))
,
log(δ)
ovviamente se il limite esiste (il che non è detto).
Esempio 5.2. Per quanto detto in precedenza, se A è un segmento di
lunghezza L, allora
[L] + 1
,
N (A, δ) =
δ
e quindi dimbc (A) = 1. Se A è un rettangolo di lati L1 ed L2 , allora
N (A, n) =
([L1 ] + 1) ([L2 ] + 1)
,
δ2
e quindi dimbc (A) = 2. Analogamente, dimbc (A) = 3 se A è un “solido”. Che
succede se A = ? In questo caso i ricoprimenti sono complicati dalla struttura di , ma possiamo farci guidare dalla definizione di come attrattore di
un sistema di funzioni iterate. Ed infatti, se prendiamo la n-sima iterazione
del quadrato unitario Q = [0, 1] × [0, 1]:
F (5) (Q)
66
5. LA DIMENSIONE DEGLI ATTRATTORI DEGLI IFS
è chiaro (dalla definizione stessa di ) che il ricoprimento dato da Kn =
F (n) (Q) è il più efficiente possibile se il lato del quadrato è 21n . Di quanti
quadrati di lato 21n è composto Kn ? Di nuovo, è facile calcolarli: K1 è l’unione
di 3 quadrati di lato 21 (le immagini di Q tramite f1 , f2 e f3 ), K2 da 9 quadrati
di lato 14 , ed in generale, Kn da 3n quadrati di lato 21n . Pertanto,
N ( , 2−n ) = 3n ,
da cui segue
log(N ( , 2−n ))
n log(3)
log(3)
lim −
= lim
=
.
−n
n→+∞
n→+∞
log(2 )
n log(2)
log(2)
In altre parole, sulla successione δn = 2−n il limite − log(N ( , δ))/ log(δ)
esiste e vale log(3)/ log(2). D’altra parte, se δ > 0 è un reale qualsiasi (minore
di 1), esiste m in N tale che 2−m ≤ δ < 2−m+1 . Pertanto,
3m−1 = N ( , 2−m+1 ) ≤ N ( , δ) ≤ N ( , 2−m ) = 3m ,
e quindi
(m − 1) log(3) ≤ log(N ( , δ)) ≤ m log(3) .
Essendo −m log(2) ≤ log(δ) < −(m − 1) log(2), si ha
m − 1 log(3)
log(N ( , δ))
m log(3)
≤−
≤
.
m log(2)
log(δ)
m − 1 log(2)
Facendo tendere δ a zero (cosicché m tende ad infinito), si ha (per il teorema
dei carabinieri)
lim+ −
δ→0
log(3)
log(N ( , δ))
=
= dimbc ( ) .
log(δ)
log(2)
– Esercizio 5.3. Calcolare la dimensione box counting di
curva di Von Koch.
e della
2. Confronto tra box counting e Hausdorff
Che legame c’è tra la dimensione box counting di un insieme e la sua
dimensione di Hausdorff?
Teorema 5.4. Sia A un sottoinsieme limitato di RN . Allora
dimH (A) ≤ dimbc (A) .
Dimostrazione. Sia s = dimbc (A). Per definizione
s = lim+ −
δ→0
log(N (A, δ))
.
log(δ)
2. CONFRONTO TRA BOX COUNTING E HAUSDORFF
67
Sia ε > 0, e sia δε > 0 tale che
s−ε≤−
log(N (A, δ))
≤ s + ε,
log(δ)
∀δ ≤ δε .
Pertanto,
1
1
,
∀δ ≤ δε .
δ s−ε
δ s−ε
Ricordando la definizione di N (A, δ), fissato δ ≤ δε esiste un ricoprimento
{Ei,δ } “efficiente” di A costituito da Mδ = N (A, δ) ipercubi di lato δ, con
δ −(s−ε)√≤ Mδ ≤ δ −(s+ε) . Essendo il diametro di un ipercubo di lato δ pari a
dδ = δ N , è chiaro che {Ei,δ } è un dδ -ricoprimento di A. Pertanto, se s > s,
0≤
≤ N (A, δ) ≤
s
Mδ X
diam(Ei,δ )
2
i=1
√
s
√ s
Mδ
X
N
N
= α(s)
δ
= α(s)
Mδ δ s
2
2
√ s
i=1
N
δ s−(s+ε) .
≤ α(s)
2
Hdsδ (A) ≤ α(s)
Scegliendo ε > 0 tale che s + ε < s, si ha, per qualche costante C indipendente
da n,
0 ≤ Hdsδ (A) ≤ C δ s−(s+ε) ,
∀δ ≥ δε .
Facendo tendere δ a zero, si ha che dδ tende a zero, e quindi Hs (A) = 0.
Pertanto,
(s, +∞) ⊆ {s ≥ 0 : Hs (A) = 0} ,
e quindi
dimH (A) = inf{s ≥ 0 : Hs (A) = 0} ≤ inf (s, +∞) = s = dimbc (A) ,
come volevasi dimostrare.
Il teorema precedente è utile quando si vuole stimare dall’alto la dimensione di Hausdorff di insiemi trovati come attrattori di sistemi di funzioni iterate.
Infatti, il calcolo dell’Esempio 5.2, può essere ripetuto per un qualsiasi sistema
di funzioni iterate: se {f1 , . . . , fm } è un sistema di funzioni iterate di fattore
di contrazione L, e se Kn = F (n) ( ), allora Kn è l’unione di mn oggetti di
diametro minore o uguale a Ln , e quindi N (K, Ln ) ≈ mn , da cui
lim −
n→+∞
log(N (K, Ln ))
n log(m)
log(m)
= lim −
=−
.
n
n→+∞
log(L )
n log(L)
log(L)
68
5. LA DIMENSIONE DEGLI ATTRATTORI DEGLI IFS
Ragionando come nell’Esempio 5.2, si vede che tale valore è il limite lungo
tutta la successione, e quindi
dimbc (K) = −
log(m)
.
log(L)
C’è, però, almeno un errore nel calcolo che abbiamo fatto. Supponiamo di
avere cinque contrazioni di fattore 12 : le quattro che generano il quadrato
dell’Esempio 3.5, più
f5 (x, y) = f1 (x, y) + ( 41 , 14 ) .
Se il calcolo precedente fosse giusto, detto K l’attrattore del sistema di funzioni
iterate {f1 , . . . , f5 }, si avrebbe
dimbc (K) = −
log(5)
log(5)
> 2.
1 =
log(2)
log( 2 )
In altre parole, se la formula fosse giusta, K avrebbe dimensione box counting
maggiore di 2, pur essendo un sottoinsieme di R2 : questo non può essere
perché, essendo K contenuto in = [0, 1] × [0, 1], si ha
N (K, δ) ≤ N ( , δ) = δ −2 ,
da cui dimbc (K) ≤ 2. In effetti, è facile vedere che la quinta contrazione non
modifica nulla rispetto alle prime 4: partendo da , si ha F (1) ( ) = , e
quindi K = (che sappiamo avere dimensione box counting proprio 2).
Dov’è l’errore? Abbiamo sbagliato nello stimare N (Kn , δ): essendo Kn =
, servono 4n quadrati di lato δ = 21n per ricoprire K n , e non 5n , come si vede
facilmente dal disegno.
F (5) ( )
2. CONFRONTO TRA BOX COUNTING E HAUSDORFF
69
Bastano meno quadrati perché le cinque immagini di tramite f1 , . . ., f5 non
sono disgiunte tra di loro: si sovrappongono (e anche di parecchio!) cosicché
una delle cinque applicazioni non influisce sul calcolo della dimensione box
counting. Nel caso di , invece, le tre immagini del quadrato unitario sono
disgiunte, e quindi Kn , visto come unione di quadrati, è un ricoprimento
“ottimale” di (se consideriamo quadrati di lato δ = 21n ).
Inoltre, abbiamo commesso un altro errore: quando diciamo che un sistema
di funzioni iterate ha fattore di contrazione L, intendiamo che il massimo dei
fattori di contrazione L1 , . . ., Lm delle funzioni f1 , . . ., fm che formano il
sistema di funzioni iterate è uguale a L. Supponiamo che f1 (x, y) = ( x2 , y2 ),
e f2 (x, y) = (1, 1). Come sistema di funzioni iterate, la coppia {f1 , f2 } ha
come fattore di contrazione L = 12 . Però, pur essendo le immagini di
disgiunte, l’insieme invariante per F è K = {(0, 0), (1, 1)} che ha dimensione
box counting 0, mentre la formula ci darebbe dimbc (K) = 1. Ovviamente, qui
il problema è che le due contrazioni hanno fattori di contrazione diversi (uno
è addirittura 0). Lo stesso accade se consideriamo l’attrattore del sistema di
funzioni iterate generato da
f1 (x, y) = ( x2 , y2 ) ,
f2 (x, y) = ( x3 + 12 , y3 + 13 ) .
F (5) ( )
È chiaro dal disegno che la dimensione box counting dell’attrattore K non può
essere 1, ma sarà strettamente minore.
Infine, un terzo problema: una contrazione è un’applicazione qualsiasi da
RN in sé, che sia lipschitziana di costante minore di 1; quindi, non è detto
che l’immagine di un quadrato sia un quadrato (o un rettangolo, un rombo:
qualcosa, insomma, di paragonabile). Tutte le contrazioni che abbiamo considerato avevano questa proprietà (essendo delle similitudini), ma non è detto
che ciò sia vero in generale.
70
5. LA DIMENSIONE DEGLI ATTRATTORI DEGLI IFS
In definitiva, se vogliamo poter calcolare “a priori” la dimensione box counting di un attrattore di un sistema di funzioni iterate, dobbiamo fare delle
ipotesi aggiuntive.
Teorema 5.5. Sia {f1 , . . . , fm } un sistema di funzioni iterate su RN ,
e sia F la funzione da K(RN ) in sé costruita a partire dall’IFS. Supponiamo
che:
(1) fi = Li x + Bi , con 0 < Li < 1 e Bi un vettore di RN (e quindi fi è
una similitudine);
(2) esiste Qr , ipercubo di lato r, tale che F (Qr ) ⊆ Qr ;
(3) se Qr è come sopra, allora fi (Qr ) ∩ fj (Qr ) = ∅ per ogni i 6= j.
Allora, detto K l’attrattore del sistema di funzioni iterate, si ha dimbc (K) = s,
dove s è l’unica soluzione positiva dell’equazione
m
X
Lsi = 1 .
i=1
Osservazione 5.6. Se valgono le (2) e (3) del teorema precedente, e se
Li = L per ogni i, allora s è tale che m Ls = 1, e quindi
s = dimbc (K) = −
log(m)
,
log(L)
che è la formula che avevamo trovato (sbagliando. . .) in precedenza.
Osservazione 5.7. Che esista un unico valore s ≥ 0 tale che
m
X
Lsi = 1 ,
i=1
si vede abbastanza facilmente usando il teorema di esistenza degli zeri. Infatti,
posto
m
X
G(s) =
Lsi ,
i=1
si ha
G(0) = m ≥ 1 ,
lim G(s) = 0 .
s→+∞
Essendo G continua, esiste almeno un valore s tale che G(s) = 1. Inoltre,
0
G (s) =
m
X
Lsi log(Li ) < 0 ,
i=1
dato che 0 < Li < 1 per ogni i. Ne segue che G è strettamente decrescente e
quindi che s è unico.
2. CONFRONTO TRA BOX COUNTING E HAUSDORFF
71
Dimostrazione. Iniziamo con l’osservare che, essendo fi una similitudine
di fattore contrattivo Li , allora l’immagine tramite fi di un quadrato Qr di
lato r è un quadrato di lato Li r e, viceversa, la controimmagine tramite fi di
un quadrato Qr di lato r è un quadrato di lato L−1
i r. Pertanto, se A è un
insieme limitato qualsiasi, si ha
N (A, δ) = N (fi (A), Li δ) ,
o, equivalentemente,
N (fi (A), δ) = N (A, L−1
i δ) .
(5.1)
Sia ora K l’attrattore del sistema di funzioni iterate. Dal momento che, per
la (2), F (Qr ) ⊆ Qr , la successione Kn = F (n) (Qr ) è tutta contenuta in Qr , e
quindi K ⊆ Qr . Essendo fi (Qr ) ∩ fj (Qr ) = ∅ per la (3), ne segue che
fi (K) ∩ fj (K) = ∅ ,
∀i 6= j .
Siccome le fi sono continue, l’insieme fi (K) è un compatto per ogni i. Dal
momento che fi (K) e fj (K) sono disgiunti, si ha
dij = min{d2 (x, y), x ∈ fi (K), y ∈ fj (K)} > 0 ,
∀i 6= j ,
perché se il minimo fosse zero, esisterebbe x nell’intersezione dei due insiemi,
che è invece vuota. Pertanto, se definiamo δ il minimo delle distanze dij al
variare di i e j (con i 6= j), e scegliamo δ < δ, si ha che se un ipercubo di lato δ
interseca uno degli insiemi fi (K), allora è disgiunto da tutti gli insiemi fj (K),
con i 6= j. In altre parole, un ricoprimento “efficace” di K con ipercubi di
lato δ si ottiene considerando gli ipercubi che ricoprono efficacemente f1 (K),
insieme a quelli che ricoprono efficacemente f2 (K), e cosı̀ via, fino a quelli che
ricoprono efficacemente fm (K). Pertanto, se δ < δ, si ha, per (5.1),
m
m
X
X
N (K, δ) =
N (fi (K), δ) =
N (K, L−1
i δ) .
i=1
i=1
Da questa relazione, segue che se s è come nell’enunciato del teorema, allora
(5.2)
lim δ s N (K, δ) = M ∈ (0, +∞) .
δ→0+
Per dare un’idea del perché ciò accada (la dimostrazione rigorosa è troppo
complicata. . .), dimostriamo la (5.2) nel caso in cui Li = Lj = L per ogni i e
j (come per esempio accade per ). Allora, posto G(δ) = N (K, δ), si ha
G(δ) = m G(L−1 δ) .
Iterando questa formula, si ha
G(L) = m G(1) ,
G(L2 ) = m G(L) = m2 G(1) ,
... ,
Se s è tale che m Ls = 1, allora mn = L−ns e quindi
(Ln )s G(Ln ) = G(1) .
G(Ln ) = mn G(1) .
72
5. LA DIMENSIONE DEGLI ATTRATTORI DEGLI IFS
Dal momento che Ln tende a zero abbiamo (almeno lungo una successione
infinitesima) che (5.2) è soddisfatta.
Una volta che la (5.2) è vera, la tesi segue in maniera semplice dalle
proprietà dei logaritmi:
log(N (K, δ))
log(δ s N (K, δ)) − s log(δ)
lim+ −
= lim+ −
= s,
δ→0
δ→0
log(δ)
log(δ)
come volevasi dimostrare.
Osservazione 5.8. Lo stesso risultato dimostrato in precedenza vale se,
invece della condizione (3), si assume la condizione più debole che l’intersezione
fi (Qr ) ∩ fj (Qr ) abbia misura N -dimensionale nulla se i 6= j.
3. La dimensione di Hausdorff degli attrattori degli IFS
Nella sezione precedente abbiamo trovato una stima dall’alto della dimensione di Hausdorff dell’attrattore di un sistema di funzioni iterate in termini delle dimensione box counting; inoltre, grazie al Teorema 5.5, sappiamo
calcolare la dimensione box counting degli attrattori di IFS definiti tramite
similitudini (che sono più o meno tutti quelli che abbiamo visto. . .). Rimane
aperto, e sarà compito delle prossime pagine, il problema di stimare dal basso la dimensione di Hausdorff degli attrattori, chiedendoci in particolare se
coincida con la dimensione box counting.
Esempio 5.9. Sia
K = {1, 21 , 31 , 14 , . . . , n1 , . . .} .
Dimostriamo che dimH (K) = 0. Siano s > 0, e sia δ > 0. Allora esiste nδ in
N tale che tutti gli elementi di K a partire dall’nδ -mo in poi sono contenuti
in (−δ, δ), e quindi K è contenuto nell’unione di un intervallo di diametro 2δ,
e di nδ intervalli di diametro piccolo a piacere (che sono necessari per coprire
i primi nδ punti 1, 21 , . . ., n1δ ), sia esso ad esempio 2δ 2/s . Pertanto,
0 ≤ Hδs (K) ≤ α(s) δ s + α(s) nδ δ 2 .
Essendo nδ ≈ δ −1 , si ha
0 ≤ Hδs (K) ≤ α(s) δ s + α(s) δ ,
da cui segue Hs (K) = 0 facendo tendere δ a zero. Essendo s > 0 arbitrario,
ne segue che dimH (K) = 0. Calcoliamo ora la dimensione box counting di K.
Sia 0 < δ < 21 , e sia k in N tale che
1
1
<δ≤
.
k(k + 1)
k(k − 1)
Chiaramente, se S è un segmento lungo δ, S può coprire al più uno dei punti in
{1, 12 , . . . , k1 }, dal momento che la distanza tra due qualsiasi di questi punti
3. LA DIMENSIONE DI HAUSDORFF DEGLI ATTRATTORI DEGLI IFS
73
1
è almeno k(k−1)
, che è maggiore di δ. Pertanto, servono almeno k segmenti di
lunghezza δ per ricoprire K, e quindi N (K, δ) ≥ k. D’altro canto, è possibile
1
ricoprire [0, k1 ] con k + 1 segmenti di lunghezza δ (perché δ > k(k+1)
, che è la
1
distanza massima tra i punti di tale intervallo), mentre {1, 2 , . . . , k1 } può
essere ricoperto con k − 1 intervalli di lunghezza δ (perché sono k − 1 punti).
Pertanto, N (K, δ) ≤ 2k. Ma allora,
log(N (K, δ))
log(2k)
log(k)
≤−
≤
.
log(k(k + 1))
log(δ)
log(k(k − 1))
Facendo tendere δ a zero (e quindi k ad infinito), per il teorema dei carabinieri
si ha
log(N (K, δ))
1
lim+ −
= = dimbc (K) ,
δ→0
log(δ)
2
cosicché dimH (K) < dimbc (K).
Ovviamente l’esempio precedente non rientra nel caso degli attrattori di
IFS (non essendo K compatto, non può essere l’attrattore di un sistema di
funzioni iterate), ma è comunque interessante per capire la differenza tra la
dimensione di Hausdorff e la dimensione box counting. Rimane però in piedi
la domanda: che succede per l’attrattore di un IFS? Sono uguali o no?
La risposta (non semplice da dare) è positiva, e, come vedremo, richiederà
nuovamente delle ipotesi aggiuntive sul sistema di funzioni iterate. Il primo
risultato ci permette di stimare dal basso dimH (K).
Teorema 5.10. Sia K in K(RN ). Supponiamo che esista una misura µ
concentrata su K tale che µ(K) > 0, ed esistano C > 0, s > 0 e ε > 0, tali
che
(5.3)
µ(E) ≤ C (diam(E))s ,
∀E : diam(E) ≤ ε
Allora dimH (K) ≥ s.
Dimostrazione. Sia δ < ε, e sia {Ei } un δ-ricoprimento di K. Allora
+∞
+∞
+∞
[ X
X
0 < µ(K) ≤ µ
Ei ≤
µ(Ei ) ≤ C
(diam(Ei ))s .
i=1
i=1
i=1
Pertanto si ha
s
+∞ X
α(s)
diam(Ei )
≥ s µ(K) > 0 ,
α(s)
2
2C
i=1
e quindi, per l’arbitrarietà del δ-ricoprimento,
Hδs (K) ≥
α(s)
µ(K) > 0 ,
2s C
∀δ < ε .
74
5. LA DIMENSIONE DEGLI ATTRATTORI DEGLI IFS
Ricordando che, come funzione di δ, Hδs (K) è decrescente, si ha Hs (K) > 0, e
quindi la tesi.
Supponiamo ora di avere un sistema di funzioni iterate per il quale valgono le ipotesi del Teorema 5.5, cosicché sappiamo calcolare la dimensione
box counting dell’attrattore K. Vogliamo fare vedere che, in questo caso, è
possibile costruire una misura su K che soddisfa le ipotesi del Teorema 5.10
con s = s, la dimensione box counting di K.
Iniziamo con un lemma tecnico.
Lemma 5.11. Sia r > 0, e sia {Qi } una famiglia di ipercubi di RN con
la proprietà che esistono 0 < a1 < a2 tali che ogni ipercubo Qi contiene
un ipercubo di lato a1 r, ed è contenuto in un ipercubo di lato a2 r, e che
l’intersezione tra due ipercubi della famiglia ha misura N -dimensionale nulla.
Allora ogni ipercubo Q2r di lato 2r interseca al più q dei Qi , e si ha
N
2(1 + a2 )
.
q≤
a1
Dimostrazione. Se Qi interseca Qr , allora Qi è contenuto nell’ipercubo
che ha lo stesso centro di Qr e lato 2r(1 + a2 ).
a2 r
Qi
Qr
2r
2r + 2a2 r
Ogni cubo che interseca Qr . . .
Pertanto, se q ipercubi di {Qi } intersecano Qr , ognuno di essi contiene un
ipercubo di lato a1 r, ed è contenuto in un ipercubo di lato 2r(1+a2 ). Pertanto,
essendo i Qi disgiunti a meno di insiemi di misura N -dimensionale nulla, la
somma delle misure N -dimensionali degli ipercubi di lato a1 r non può essere
superiore alla misura N -dimensionale dell’ipercubo di lato 2r(1 + a2 ) che li
contiene, e quindi
q (a1 r)N ≤ (2r(1 + a2 ))N ,
3. LA DIMENSIONE DI HAUSDORFF DEGLI ATTRATTORI DEGLI IFS
75
da cui si ottiene
q≤
2(1 + a2 )
a1
N
,
come volevasi dimostrare.
Il secondo risultato tecnico ci dice come costruire una misura su oggetti
ottenuti tramite suddivisioni di un insieme iniziale.
Lemma 5.12. Sia A un sottoinsieme compatto di RN , e sia E0 = A. Per k
in N, sia Ek una famiglia finita disgiunta di compatti contenuti in A tali che
(1) ogni E in Ek è contenuto in un insieme di Ek−1 ;
(2) ogni E in Ek contiene un numero finito di insiemi di Ek+1 ;
(3) si ha
lim max{diam(E), E ∈ Ek } = 0 .
k→+∞
Sia µ definita nella maniera seguente: µ(A) è assegnata, con 0 < µ(A) < +∞;
definiamo poi µ sugli insiemi di E1 in maniera tale che
X
µ(A) =
µ(Ei ) ,
Ei ∈E1
e, proseguendo, definiamo µ sugli insiemi di Ek in modo tale che se E1 , . . ., Ek
sono insiemi di Ek contenuti in un insieme Ẽ di Ek−1 , allora
µ(Ẽ) =
k
X
µ(Ei ) .
i=1
µ(E0 )
µ(E1 )
µ(E2 )
µ(E2 )
µ(E1 )
µ(E2 )
µ(E2 )
Suddivisione di insiemi e misure
Definiamo Ek l’unione di tutti gli insiemi di Ek , e definiamo µ(E) = 0 se
E ∩ Ek = ∅. Pertanto, se E è l’unione di tutte le famiglie Ek , e di tutti i
sottoinsiemi di RN \ Ek , abbiamo che la funzione µ è definita su E. Allora
esiste una misura µ̃, definita su tutto RN , che estende µ, ed il cui supporto è
contenuto nell’intersezione degli Ek .
76
5. LA DIMENSIONE DEGLI ATTRATTORI DEGLI IFS
Dimostrazione. Se E è un sottoinsieme di RN , definiamo
(
)
X
[
µ̃(E) = inf
µ(Ei ), E ⊆
Ei e Ei ∈ E .
i
i
Se E appartiene ad E, si ha chiaramente µ̃(E) = µ(E) (perché abbiamo definito µ su E tramite suddivisioni). Inoltre, essendo µ(RN \ Ek ) = 0 per
costruzione, se E è un sottoinsieme di RN disgiunto da Ek per qualche k,
allora µ̃(E) = 0, e quindi il supporto di µ̃ è contenuto in Ek per ogni k, e
dunque nell’intersezione. La dimostrazione del fatto che µ̃ sia effettivamente
una misura è lasciata al lettore. . .
Esempio 5.13. Sia A = [0, 1], sia Ek la famiglia degli intervalli della forma
),
Ej = [ 2jk , j+1
2k
j = 0, 1, . . . , 2k − 1 ,
ed osserviamo che Ek soddisfa la (1), la (2) e la (3) del lemma precedente.
Se E è in Ek , definiamo µ(E) = 21k , cosicché le condizioni sulle suddivisioni
della misura sono soddisfatte. Pertanto, a partire da µ definita su E, possiamo
costruire una misura µ̃ definita su R. Se I = (a, b) è un intervallo contenuto
in [0, 1], allora
(
)
X
[
µ̃(I) = inf
µ(Ei ), I ⊆
Ei e Ei ∈ E = (b − a) ,
i
i
e quindi µ̃ coincide con la misura di Lebesgue sugli intervalli. Questa informazione è sufficiente per caratterizzare µ̃ esattamente come la misura di Lebesgue
(concentrata su [0, 1]).
Possiamo ora dimostrare il risultato che ci permette di stimare dal basso
la dimensione di Hausdorff di un attrattore di IFS.
Teorema 5.14. Sia {f1 , . . . , fm } un sistema di funzioni iterate definito
su RN , e supponiamo che soddisfi le ipotesi del Teorema 5.5 (o, per la (3),
dell’Osservazione 5.8). Detto K l’attrattore dell’IFS, e posto s = dimbc (K),
si ha dimH (K) ≥ s.
Dimostrazione. Per il Teorema 5.10, dobbiamo costruire una misura µ
su K che soddisfi (5.3) con s = s, ricordando che s è tale che
m
X
Lsi = 1 .
i=1
Sia ora Qr l’ipercubo delle ipotesi (2) e (3) del Teorema 5.5, che quindi è tale
che
m
[
F (Qr ) =
Fi (Qr ) ⊆ Qr ,
i=1
3. LA DIMENSIONE DI HAUSDORFF DEGLI ATTRATTORI DEGLI IFS
77
con unione disgiunta. Pertanto, se definiamo K0 = Qr , e Kn = F (n) (Qr ),
abbiamo che {Kn } è una successione decrescente di insiemi in K(RN ), e Kn
è l’unione disgiunta di mn compatti Kn,j1 ,...,jn con j1 , . . ., jn interi compresi
tra 1 e m, e
Kn,j1 ,...,jn = (Fjn ◦ Fjn−1 ◦ . . . ◦ Fj2 ◦ Fj1 )(Qr ) .
Se definiamo En come la famiglia degli insiemi Kn,j1 ,...,jn , è chiaro che En soddisfa le ipotesi (1), (2) e (3) del Lemma 5.12. In particolare, la (3) è vera
perché il diametro di Kn,j1 ,...,jn è dato da Lj1 · · · Ljn r, cosicché
0 ≤ diam(Kn,j1 ,...,jn ) ≤ (max{L1 , . . . , Lm })n r ,
e la quantità a destra è infinitesima essendo Li < 1 per ogni i. Definiamo
µ(Kn,j1 ,...,jn ) = (Lj1 · · · Ljn )s ,
ed osserviamo che (essendo le unioni disgiunte)
X
X
m
m
X
s
s
s
µ(Kn ) =
(Lj1 · · · Ljn ) =
Lj1 · · ·
Ljn = 1 ,
1≤j1 ,...,jn ≤m
j1 =1
jn =1
e che, essendo
s
(Lj1 · · · Ljn ) =
m
X
(Lj1 · · · Ljn Ljn+1 )s ,
jn+1 =1
si ha
µ(Kn,j1 ,...,jn ) =
m
X
µ(Kn,j1 ,...,jn ,jn+1 ) .
jn+1 =1
Dal momento che µ soddisfa le ipotesi di “suddivisione” del Lemma 5.12, è
possibile estendere µ ad una misura µ̃, definita su RN , ed il cui supporto è
contenuto nell’intersezione dei Kn , che è l’attrattore K dell’IFS.
Verifichiamo ora che µ̃ soddisfa le ipotesi del Teorema 5.10. Sia Q un
ipercubo di lato 2r, e sia data una successione {jh } di interi compresi tra 1
ed m. Sia k il primo intero per il quale si ha
(5.4)
min{L1 , . . . , Lm } r ≤ Lj1 · · · Ljk r ≤ r .
Si noti che k dipende dai valori Li (e quindi dalla successione {jh }), e può
quindi variare. Sia ora S l’insieme delle k-ple j1 , . . ., jk tali che valga (5.4), e
sia
T = {(Fjk ◦ · · · ◦ Fj1 )(Qr ), (j1 , . . . , jk ) ∈ S} .
Gli insiemi contenuti in T sono ipercubi disgiunti tra loro. Siano infatti A e
B in T , con A 6= B. Allora
A = (Fjk ◦ · · · ◦ Fj1 )(Qr ) ,
B = (Fih ◦ · · · ◦ Fi1 )(Qr ) ,
78
5. LA DIMENSIONE DEGLI ATTRATTORI DEGLI IFS
con (j1 , . . . , jk ) e (i1 , . . . , ih ) in S. Supponiamo che sia h = min{h, k}.
Allora esiste `, compreso tra 1 e h, tale che j` 6= i` . Se cosı̀ non fosse, ovvero
se gli indici coincidessero fino ad h, allora k = h; infatti, non può essere k > h
perché k è il primo intero per cui vale (5.4) (e quindi (5.4) non può valere,
per la stessa successione di indici, per h < k). Ma se k = h, allora A = B,
il che non è. Pertanto, ad un certo punto, gli indici differiscono. Siccome
contrazioni diverse “disgiungono” gli insiemi (per l’ipotesi (3) del teorema),
A e B sono “disgiunti al passo `” e quindi disgiunti. Inoltre, gli ipercubi di
T hanno un lato pari a Lj1 · · · Ljk r, e quindi contengono un ipercubo di lato
min{L1 , . . . , Lm } r = a1 r, e sono contenuti in un ipercubo di lato r = a2 r.
Per il Lemma 5.11, l’ipercubo Q di lato 2r interseca al più q degli ipercubi di
T , con
N N
2(1 + a2 )
4
q≤
=
= q0 .
a1
min{L1 , . . . , Lm }
Se definiamo
[
e=
Q
Qi ,
Qi ∈T : Q∩Qi 6=∅
allora
e ∪ (Q \ Q)
e ,
Q=Q
e non interseca nessuno degli ipercubi di T . Supponiamo di
e l’insieme Q \ Q
e ha intersezione vuota con E .
aver dimostrato che esiste k tale che Q \ Q
k
Allora si ha (per definizione di µ̃)
X
X
e =
µ̃(Q) ≤
µ(Qi ) + µ(Q \ Q)
µ(Qi ) .
Qi ∈T : Q∩Qi 6=∅
Qi ∈T : Q∩Qi 6=∅
D’altra parte, se Qi è in T , allora Qi corrisponde ad una k-pla j1 , . . ., jk di
indici, cosicché Qi è in Ek , e quindi
µ(Qi ) = (Lj1 · · · Ljk )s .
Pertanto, ricordando (5.4),
X
µ̃(Q) ≤
(Lj1 · · · Ljk )s ≤ q0
Qi ∈T : Q∩Qi 6=∅
1 s
r = C rs .
s
r
Sia ora E un insieme di diametro uguale ad r. Allora E è contenuto in un
ipercubo Q di lato 2r e quindi
µ̃(E) ≤ µ̃(Q) ≤ C rs = C (diam(E))s .
Sono pertanto soddisfatte le ipotesi del Teorema 5.10, e quindi la dimensione
di Hausdorff di K è maggiore di s.
e ha intersezione vuota con E per
Rimane quindi da dimostrare che Q \ Q
k
qualche k. Definiamo k il massimo delle lunghezze delle k-ple j1 , . . ., jk in S, e
3. LA DIMENSIONE DI HAUSDORFF DEGLI ATTRATTORI DEGLI IFS
79
e allora E sarebbe disgiunto da tutti i Qi di
sia E in Ek . Se E intersecasse Q\ Q,
T che intersecano Q, ma intersecherebbe Q. Ciò però non è possibile, perché,
essendo E contenuto in Ek , è contenuto in (e quindi interseca) almeno uno dei
Qi di T (dato che o è uno di essi, o proviene da uno di essi come immagine
tramite iterate di F ), che quindi avrebbe intersezione non vuota con Q.
Esempio 5.15. Per chiarire la dimostrazione precedente, consideriamo ,
che è l’attrattore dell’IFS generato da tre contrazioni di fattore 21 . Partiamo
da Qr = Q1 = [0, 1] × [0, 1], e costruiamo la successione Kn delle iterate di Q1
log(3)
tramite F . Essendo s = log(2)
, la misura µ è definita su Kn,j1 ,...,jn come segue:
s
1
1
=
µ(Kn,j1 ,...,jn ) =
.
2n
3n
Essendo Kn l’unione di 3n quadrati disgiunti (di lato 2−n ), è chiaro che
µ(Kn ) = 1 per ogni n. Se ora consideriamo un quadrato Q di lato 2r, la
formula (5.4) si semplifica: dato che Ljh = 21 per ogni jh , si tratta solo di
scegliere k tale che
r
1
≤
≤ r.
2
2k
In questa maniera,
S = {(j1 , . . . , jk ), jh ∈ {1, . . . , m} per ogni h} ,
e
T = {Qi : Qi è uno dei quadrati la cui unione è Kk } .
e ha
A questo punto, al più 64 quadrati di T intersecano Q, e chiaramente Q\ Q
intersezione vuota con Ek = Kk , dato che abbiamo “cancellato” da Kk tutti i
quadrati che intersecano Q.
Strumenti e programmi
Che ci si creda o no, le uniche figure di questi appunti “costruite” senza
usare TEX sono nel Capitolo 3 (a vedere la qualità del disegno si direbbe: per
fortuna!). Tutti gli altri oggetti (ed in special modo le approssimazioni F (n)
degli attrattori di sistemi di funzioni iterate) sono disegnati usando software
reperibili nella distribuzione standard del TEX (quando sono stati scritti gli
appunti, la distribuzione era la TEX Live 2010, reperibile on line all’indirizzo
http://www.tug.org/texlive/).
Il pacchetto software utilizzato si chiama tikz (dal tedesco: “TikZ ist
kein Zeichenprogramm”, “tikz non è un programma di disegno”), corredato
da un manuale di più di 700 (!) pagine. Le possibilità di disegno (o di “non
disegno”, secondo l’autore) sono pressoché infinite, agevolate da una serie di
comandi semplici (come draw o rectangle, circle e simili), e dalla possibilità
di specificare le coordinate dei punti usando il sistema cartesiano. Ad esempio,
con i comandi
\begin{tikzpicture}[scale=2]
\draw [fill=red]
(0,0) -- (1,0) -- (1,1) -- (0,1) -- cycle;
\draw [fill=blue] (1,0) -- (2,0) -- (2,1) -- (1,1) -- cycle;
\draw [fill=green] (1,1) -- (2,1) -- (2,2) -- (1,2) -- cycle;
\end{tikzpicture}
si disegnano tre quadrati di diversi colori:
con la possibilità di aggiungere etichette e comandi standard del TEX. Ad
esempio,
\begin{tikzpicture}[scale=2]
\draw [fill=red]
(0,0) -- (1,0) -- (1,1) -- (0,1) -- cycle;
81
82
STRUMENTI E PROGRAMMI
\draw [fill=blue] (1,0) -- (2,0) -- (2,1) -- (1,1) -- cycle;
\draw [fill=green] (1,1) -- (2,1) -- (2,2) -- (1,2) -- cycle;
\draw (0,0) node[below]{$(0,0)$};
\draw (2,0) node[below]{$(2,0)$};
\draw (2,2) node[above]{$(2,2)$};
\draw [fill=black] (0.5,0.5) circle (0.05)
node[above]{$(\frac12,\frac12)$};
\draw [fill=white,color=white] (3/2,1/2) circle (0.05)
node[above]{$(\frac32,\frac12)$};
\draw [fill=magenta] (1+1/2,1.5) circle (0.05)
node[above]{$(\frac32,\frac32)$};
\end{tikzpicture}
completa il disegno cosı̀:
(2, 2)
( 32 , 32 )
( 12 , 12 )
(0, 0)
( 32 , 12 )
(2, 0)
Si noti che il programma calcola correttamente sia 3/2 che 1+1/2, e che riconosce i colori. Inoltre, è molto preciso nel “posizionare” gli oggetti grafici
sulla pagina. Ad esempio:
\begin{tikzpicture}[
scale=20,
spy using outlines={magnification=12, size=2cm, connect spies}
]
\draw [ultra thin] (0.000,0.000) circle (0.001);
\draw [ultra thin] (0.003,0.000) circle (0.001);
\spy on (0.030,0.000) in node [left] at (0.2,0.0);
\end{tikzpicture}
crea il seguente disegno:
STRUMENTI E PROGRAMMI
83
Si noti che l’ingrandimento è automatico (e fornito dal pacchetto aggiuntivo
“spy”, da caricarsi a parte col comando \usetikzpackage{spy}).
Pertanto, dovendo disegnare innumerevoli quadratini e/o triangolini di vari colori per rappresentare le approssimazioni degli attrattori, la scelta di tikz
era, in un certo senso, obbligata. D’altra parte, però, per disegnare l’approssimazione di ordine 6 di , sono necessari 36 = 729 oggetti, ed è chiaro che
“scriverli” tutti diventa istantaneamente un’impresa improba (a dire il vero,
lo è già per i 9 oggetti dell’approssimazione di ordine 2. . .).
In sostanza, se da un lato tikz fornisce gli strumenti “per disegnare”,
non è possibile usarlo senza ricorrere a qualche altro ausilio informatico che
“generi” i comandi corretti, con le corrette coordinate. A ben vedere, generare
un’approssimazione di ordine qualsiasi di un attrattore è cosa semplice:
(1) partire da un insieme iniziale di punti (ad esempio, i quattro vertici
del quadrato [0, 1] × [0, 1]);
(2) calcolare le immagini di tali punti tramite le contrazioni dell’IFS (ad
esempio, le tre contrazioni che generano );
(3) sostituire all’insieme dei punti iniziali il nuovo insieme di punti e
tornare a (2), oppure. . .
(4) . . .fermarsi quando si è raggiunta l’n-sima iterazione e formattare i
dati in maniera che tikz possa disegnarli.
A questo punto, ognuno può scegliere il proprio linguaggio di programmazione preferito e scrivere il programma che esegue i calcoli . Chi scrive ha
usato REBOL (reperibile gratuitamente all’indirizzo http://www.rebol.com).
REBOL è un linguaggio di programmazione specificamente pensato per trattare liste di dati; è, ad esempio, ottimo per estrarre informazioni da una pagina
web. I comandi principali usati nei programmi che seguono sono:
• pick lista posizione: data una lista [a1 a2 . . . an ], estrae l’elemento
che occupa la posizione specificata; ad esempio, pick [1 3 5 7] 3
dà come risultato 5.
• first lista: è uguale a pick lista 1.
• length? lista: restituisce la lunghezza della lista.
• last lista: è uguale a pick lista (length? lista).
• select lista elemento: restituisce l’elemento di lista successivo ad elemento. Ad esempio, select [1 [2 3] 2 [4 5] 3 [6]] 2 dà come
risultato [4 5].
• next lista: restituisce la lista ottenuta a partire dall’elemento successivo a quello selezionato; ad esempio next select [1 [2 3] 2 [4
5] 3 [6]] 2 dà come risultato [3 [6]].
• reduce lista: data una lista [a1 a2 . . . an ], composta di variabili,
restituisce una lista i cui elementi sono i valori delle variabili; se, ad
esempio, a = 1 e b = 2, allora reduce [a b] = [1 2].
84
STRUMENTI E PROGRAMMI
• rejoin lista: è come reduce, solo che restituisce la stringa ottenuta
concatenando i valori delle variabili in lista; ad esempio, se a = 3,
allora rejoin [‘ci sono ’ a ‘ persone’] dà come risultato ‘ci
sono 3 persone’.
• append lista a: data una lista [a1 a2 . . . an ], restituisce la lista
[a1 a2 . . . an a]. Se lista è una stringa ‘stringa’, allora append
‘stringa’ ‘appesa’ restituisce la stringa ‘stringaappesa’.
• copy/part lista lunghezza: restituisce i primi lunghezza elementi di
lista (che può anche essere una stringa); ad esempio, copy/part [1
2 3 4] 2 dà come risultato [1 2].
• skip lista lunghezza: restituisce la lista (che può anche essere una
stringa) privata dei primi lunghezza elementi; ad esempio, skip [1 2
3 4] 2 dà come risultato [3 4].
REBOL [‘Sistemi di funzioni iterate’]
;=== FUNZIONI ===
; calcola A*X+B
trasforma: func [
matrice
vettore
/local temp x temp y
][
; calcola a11*x + a12*y + b1
temp x: ((pick matrice 1) * (pick
temp x: ((pick matrice 2) * (pick
temp x: (pick matrice 5) + temp x
; calcola a21*x + a22*y + b2
temp y: ((pick matrice 3) * (pick
temp y: ((pick matrice 4) * (pick
temp y: (pick matrice 6) + temp y
return reduce [temp x temp y]
]
vettore 1))
vettore 2)) + temp x
vettore 1))
vettore 2)) + temp y
; scrive un numero con ’posti’ cifre decimali
formato decimale: func [
valore
posti
/local cifra indice nuovo valore segno
temp lungh temp stringa zeri
][
temp stringa: copy ‘1’
for indice 1 posti 1 [
append temp stringa ‘0’
]
STRUMENTI E PROGRAMMI
; ‘1’ seguito da tanti zeri quanti i posti
nuovo valore: to-integer ((to-integer temp stringa) * valore)
; moltiplicato e arrotondato
either (nuovo valore < 0) [
segno: ‘-’
nuovo valore: abs nuovo valore
][
segno: ‘ ’
]
; scopre se la stringa inizia con ’-’ o con ’ ’
temp stringa: copy ‘’
until [
cifra: to-integer remainder nuovo valore 10
nuovo valore: to-integer ((nuovo-valore - cifra) / 10)
temp stringa: rejoin [cifra temp stringa]
nuovo valore = 0
]
; si ferma quando il numero = zero
if ((length? temp stringa) <= posti) [
zeri: posti + 1 - (length? temp stringa)
temp stringa: rejoin [
copy/part ‘0000000000’ zeri
temp stringa
]
]
; calcola gli zeri iniziali
temp lungh: (length? temp stringa) - posti
return to-string rejoin [
segno
copy/part temp stringa temp lungh
‘.’
skip temp stringa temp lungh
]
; costruisce la stringa con ’posti’ cifre decimali
]
; crea una stringa con il vettore e le parentesi
scrive vettore: func [
vettore
decim
][
return rejoin [
‘(’
(formato decimale (pick vettore 1) decim)
‘, ’
(formato decimale (pick vettore 2) decim)
‘)’
]
85
86
STRUMENTI E PROGRAMMI
]
;=== FORME ===
; il formato: stringa di tikz con ’ pi ’ per i punti
; e ’ colore ’ per il colore, seguita dagli n punti
forme: [
‘quadrato’
[
‘\draw [shape= colore ]
p1 -p2 -p3 -p4 -cycle;^/’
[0.0 0.0]
[1.0 0.0]
[1.0 1.0]
[0.0 1.0]
]
]
;=== IFS ===
; formato di A (2x2) e B (1x2):
; [a 11 a 12 a 21 a 22 b 1 b 2]
ifs: [
‘equisierpinski’
[
[0.5 0.0 0.0 0.5 0.00 0.000]
[0.5 0.0 0.0 0.5 0.25 0.433]
[0.5 0.0 0.0 0.5 0.50 0.000]
]
]
colori bordo: [‘gray!50’ ‘#1!80’]
;=== SCELTE ===
forma scelta: ‘quadrato’
ifs scelto: ‘equisierpinski’
livello max: 4
tipo: 1
; 1 = colori in sequenza
; 2 = colori ’a blocchi’
; 3 = random
colore bordo: 2
; 1 = bordo grigio
STRUMENTI E PROGRAMMI
; 2 = stesso colore della forma
decimali: 6
sovrapposto: 1
; 1 = si disegna solo l’ultima iterazione
; 2 = si sovrappongono le iterazioni
;=== PROGRAMMA ===
stringa da cambiare: copy first select forme forma scelta
; la stringa di comandi tikz
punti iniziali: copy next select forme forma scelta
; i punti della forma scelta
trasformazioni: copy select ifs ifs scelto
; l’ifs scelto
punti: copy reduce [punti iniziali]
; copiamo i punti iniziali per non perderli
for livello 1 livello max 1 [
; punti calcolati precedentemente
punti livello: pick punti livello
temp punti: copy [ ]
; calcoliamo l’immagine dei punti tramite l’ifs
foreach trasformazione trasformazioni [
foreach punto punti livello [
append temp punti reduce [
trasforma trasformazione punto
]
]
]
append punti reduce [temp punti]
]
; stringa iniziale del TeX
stringa tex: copy ‘\tikzset{
shape/.style={
draw= bcolore ,
ultra thin,
fill=#1!80
}
}
\definecolor{col01}{rgb}{1.0,0.0,0.0};
\definecolor{col02}{rgb}{0.0,1.0,0.0};
\definecolor{col03}{rgb}{0.0,0.0,1.0};
\definecolor{col04}{rgb}{0.0,1.0,1.0};
\definecolor{col05}{rgb}{1.0,0.0,1.0};
\definecolor{col06}{rgb}{1.0,1.0,0.0};
\definecolor{col07}{rgb}{0.5,0.2,0.3};
87
88
STRUMENTI E PROGRAMMI
\definecolor{col08}{rgb}{0.2,0.5,0.3};
\definecolor{col09}{rgb}{0.5,0.3,0.2};
\definecolor{col10}{rgb}{0.3,0.5,0.2};
\definecolor{col11}{rgb}{0.2,0.3,0.5};
\definecolor{col12}{rgb}{0.3,0.2,0.5};
\definecolor{col13}{rgb}{0.6,0.3,0.1};
\definecolor{col14}{rgb}{0.1,0.3,0.6};
\definecolor{col15}{rgb}{0.3,0.1,0.6};
’
; lista dei colori possibili (vedere sopra)
colori: [
‘col01’ ‘col02’ ‘col03’ ‘col04’ ‘col05’
‘col06’ ‘col07’ ‘col08’ ‘col09’ ‘col10’
‘col11’ ‘col12’ ‘col13’ ‘col14’ ‘col15’
]
; quante sono le contrazioni dell’ifs?
num trasform: length? trasformazioni
; e quanti i punti della forma?
max interno: length? punti iniziali
; stabiliamo come colorare il bordo
bordo colore: pick colori bordo colore bordo
replace/all stringa tex ‘ bcolore ’ bordo colore
; o solo l’ultima, o tutte le iterazioni
either (sovrapposto = 1) [
min sovrapposti: 1
][
min sovrapposti: livello max + 1
]
; ciclo esterno (ne servono due per la colorazione)
for sovrapposti min sovrapposti (livello max + 1) 1 [
; scegliamo l’insieme delle forme da disegnare
punti disegno: copy (pick punti sovrapposti)
; quante sono le forme (non i punti)?
max esterno: (length? punti disegno) / max interno
; divisione in parti (per la colorazione)
parti: max esterno / num trasform
for esterno 1 max esterno 1 [
; o colori in sequenza, o a blocchi, o random...
switch tipo [
1 [colore: 1 + (mod (esterno - 1) num trasform)]
2 [colore: 1 + to-integer ((esterno - 1) / parti)]
3 [colore: random num trasform]
STRUMENTI E PROGRAMMI
89
]
; ...ma sempre tra 1 e 15
colore: 1 + (mod (colore - 1) 15)
; copiamo la stringa tikz
tempor stringa: copy stringa da cambiare
; cambiamo il colore con quello calcolato sopra
punto colore: pick colori colore
replace/all tempor stringa ‘ colore ’ punto colore
; sostituiamo ’ pi ’ con le coordinate con i decimali giusti
for interno 1 max interno 1 [
nome punto: rejoin [‘ p’ interno ‘ ’]
posizione: interno + ((esterno - 1) * max interno)
punto: pick punti disegno posizione
coord punto: scrive vettore punto decimali
replace/all tempor stringa nome punto coord punto
]
; scriviamo la stringa in coda al TeX
append stringa tex tempor stringa
]
]
nome file: rejoin [
‘IFSS/’
ifs scelto
‘-’
forma scelta
‘-’
livello max
‘-’
tipo
‘.tex’
]
; pronto per l’input!
write to-file nome file stringa tex
Il prossimo programma disegna invece n punti di un IFS con probabilità. In
questo caso, le matrici delle contrazioni hanno un parametro in più; per , si
hanno ad esempio tre contrazioni con probabilità 33, 66 e 100: il che vuol dire
che la prima contrazione sarà scelta 33 volte su 100, la seconda 66 − 33 = 33
volte su 100, e la terza 100 − 66 = 34 volte su 100. Per determinare quale
contrazione scegliere, si costruisce la seguente funzione (nel caso di ):
G(x) = χ[1,33] (x) + 2 χ[34,66] (x) + 3 χ[67,100] (x) ,
e si estrae un numero casuale x tra 1 e 100: G(x) assume cosı̀ il valore 1, 2
o 3, e si usa la contrazione corrispondente. Nel programma si usa la seguente
90
STRUMENTI E PROGRAMMI
definizione di funzione caratteristica dell’intervallo [α, β], con α e β interi:
χ[α,β] (x) = [min{1, max{β − α + 1 − |2x − α − β|, 0}}] ,
dove come al solito [·] indica la parte intera.
1
α−1
α
β
β+1
Il grafico di min{1, max{β − α + 1 − |2x − α − β|, 0}}
Una volta assegnate le probabilità, si tratta quindi di costruire la funzione G
come sopra. Per farlo, si usa una delle caratteristiche interessanti del linguaggio REBOL. Infatti, viene prima definita la funzione caratteristica (con tre
parametri) che non fa altro che calcolare la funzione χ[a,b] (x), e successivamente si costruisce la stringa alfanumerica funzione_probabili che inizia con
probabile: func [ics], e prosegue concatenando stringhe della forma
1 * (caratteristica 1 33 ics),
2 * (caratteristica 34 66 ics),
e cosı̀ via. Alla fine viene eseguito il comando do funzione_probabili che
non fa altro che prendere la stringa funzione_probabili ed eseguirla come
fosse un programma REBOL. Siccome la stringa è formata in modo da essere un corretto programma REBOL, il risultato è che viene creata la funzione
probabile[ics], che vale 1 se ics è compreso tra 1 e 33, 2 se ics è compreso
tra 34 e 66, e cosı̀ via. In altre parole, all’inizio dell’esecuzione del programma
la funzione probabile non esiste, ma viene “creata” in corso d’opera a partire
dai parametri probabilistici delle contrazioni dell’IFS. Una volta costruita tale
funzione, il programma è molto semplice.
REBOL [‘Random IFS’]
; === FUNZIONI ===
; La stessa di prima
trasforma: func [
...
]
; La stessa di prima
STRUMENTI E PROGRAMMI
formato decimale: func [
...
]
; La stessa di prima
scrive vettore: func [
...
]
; funzione caratteristica di [alfa, beta]
; vedere commenti
caratteristica: func [
alfa
beta
ics
/local temp
][
temp: abs ((2 * ics) - alfa - beta)
temp: beta - alfa + 1 - temp
temp: max 0 temp
temp: min 1 temp
return to-integer temp
]
; === IFS ===
; A (2x2), B (2x1), P (1x1)
; [a 11 a 12 a 21 a 22 b 1 b 2 p]
ifs: [
‘equisierpinski’
[
[0.5 0.0 0.0 0.5 0.00 0.000 33]
[0.5 0.0 0.0 0.5 0.25 0.433 66]
[0.5 0.0 0.0 0.5 0.50 0.000 100]
]
]
; === PROGRAMMA ===
; dati iniziali
ifs scelto: ‘equisierpinski’
; quanti punti disegnare?
max punti: 1000
; raggio del cerchio di ogni punto
raggio: 0.001
trasformazioni: select ifs ifs scelto
probabili: copy [0]
foreach trasformazione trasformazioni [
91
92
STRUMENTI E PROGRAMMI
append probabili last trasformazione
]
; il vettore con tutte le p i
funzione probabili: copy ‘probabile: func [ics][’
for indice 1 ((length? probabili) - 1) 1 [
append funzione probabili rejoin [
‘(’
indice
‘ * (caratteristica ’
((pick probabili indice) + 1)
‘ ’
(pick probabili (indice + 1))
‘ ics)) + ’
]
]
append funzione probabili ‘0]’
; il prossimo comando ’crea’ la funzione ’probabile[ics]’
; spiegato in precedenza
do funzione probabili
; la stessa - o quasi - di prima
stringa tex: copy ‘\tikzset{
shape/.style={
draw=gray!50,
ultra thin,
fill=#1
}
}
\definecolor{col01}{rgb}{1.0,0.0,0.0};
; ...
; come prima
; ...
\definecolor{col15}{rgb}{0.3,0.1,0.6};
’
colori: [
‘col01’ ‘col02’ ‘col03’ ‘col04’ ‘col05’
‘col06’ ‘col07’ ‘col08’ ‘col09’ ‘col10’
‘col11’ ‘col12’ ‘col13’ ‘col14’ ‘col15’
]
; il programma vero e proprio, molto semplice
; parte da un punto P 0, sceglie una trasformazione random
; calcola P 1 e lo aggiunge alla lista dei punti da disegnare
; definisce P 0 = P 1 e riparte; si ferma dopo max punti iterazioni
punto iniziale: [0 0]
for contatore 1 max punti 1 [
STRUMENTI E PROGRAMMI
mappa scelta: probabile (random 100)
mappa random: pick trasformazioni mappa scelta
nuovo punto: trasforma mappa random punto iniziale
append stringa tex rejoin [
‘\draw [shape=’
(pick colori (1 + (mod (mappa scelta - 1) 15)))
‘] ’
(scrivi vettore nuovo punto 5)
‘ circle (’
(formato decimale raggio 4)
‘);^/’
]
punto iniziale: nuovo punto
]
nome file: rejoin [
ifs scelto
‘-’
max punti
‘.tex’
]
write rejoin [%Random IFSS/ nome file] stringa tex
93
Indice analitico
δ-ricoprimento, 56
K(X), 21
σ-algebra, 59
REBOL, 83
tikz, 81
disuguaglianza triangolare, 9
estensione di sottosuccessioni, 27
fattore di contrazione, 15
funzione continua, 12
funzione gamma, 56
funzione lipschitziana, 12
funzioni da K(X) in sé, 33
attrattore di un IFS, 42
calcolo della dimensione box counting di
IFS, 70
calcolo della dimensione di Hausdorff di
IFS, 76
caratterizzazione dei compatti, 19
caratterizzazione dei limiti in (K(X), h),
31
compattezza, 19
completezza, 15
completezza di (K(X), h), 28
confronto fra dimensione di Hausdorff e
dimensione box counting, 66
continuità e compattezza, 20
contrazione, 15
contrazioni su (K(X), h), 34
convergenza in (X, d), 11
curva di von Koch, 45
IFS del quadrato, 40
IFS della curva di von Koch, 45
IFS della diagonale, 35
IFS di , 38
IFS di un albero, 49
insieme aperto, 10
insieme autosimilare, 43
insieme chiuso, 10
insieme invariante, 34
insieme limitato, 10
insieme misurabile, 59
insiemi chiusi e convergenza, 11
insiemi chiusi in spazi completi, 15
iterata n-sima, 16
metrica discreta, 9
metrica euclidea, 9
misura, 59
misura di Hausdorff, 57
misura esterna, 59
diametro di un insieme, 55
dilatazione, 25
dimensione box counting, 65
dimensione box counting di , 65
dimensione di Hausdorff, 61
distanza, 9
distanza da un punto, 12, 21
distanza di Hausdorff, 23
distanza di Hausdorff e convergenza, 26
distanza di Hausdorff e dilatazioni, 25
distanza orientata, 23
punto fisso, 15
sfera aperta, 10
sfera chiusa, 10
similitudine, 70
sistema di funzioni iterate (IFS), 41
95
96
INDICE ANALITICO
sistema di funzioni iterate con
probabilità, 52
spazio metrico, 9
stima dal basso della dimensione di
Hausdorff, 73
successione di Cauchy, 13
suddivisione di una misura, 75
teorema del Collage, 44
teorema delle contrazioni, 16
teorema di Weierstrass, 21
totale limitatezza, 19
triangolo di Sierpinski, 40
unicità del limite, 11