1. Funzioni")
APPENDICE D (Trasformata L e trasformata Z)
1. Funzioni complesse di variabile complessa
DEFINIZIONE 1.1 (funzione complessa di variabile complessa)
Sia I un qualunque insieme del campo complesso, diremo che in I è definita una funzione f(⋅) complessa di variabile complessa se ad
ogni numero complesso z∈I è associato un altro numero complesso w = f(z) in maniera univoca.
OSSERVAZIONE 1.1
La precedente definizione non differisce dalla definizione di funzione reale di variabile reale. E' diverso solo l'insieme di numeri
coinvolti nella definizione.
DEFINIZIONE 1.2 (limite di una funzione complessa di variabile complessa)
Sia f(z) una funzione complessa di variabile complessa (e d'ora in poi, salvo ambiguità non si ripeterà più tale dizione) definita
nell'insieme I e sia z0 un suo punto di accumulazione. Diremo che esiste e vale a il limite di f(z) per z che tende a z0 se per ogni ε
reale positivo arbitrario esiste un δ anch'esso reale positivo tale che:
f ( z )− a < ε
∀z ∈ I tale che z − z0 < δ z=z0 al più escluso
(D.1.1)
Si scriverà:
lim f ( z ) = a
z→ z
0
se z0 = ∞ la disuguaglianza data dalla (D.1.1) deve verificarsi per ogni valore z∈I tale che |z| > δ.
Analogamente si dirà che:
lim f ( z ) = ∞
z→ z
0
se per ogni η positivo arbitrario esiste un δ anch'esso positivo tale che:
f(z) >η
∀z ∈ I tale che
z − z0 < δ
OSSERVAZIONE 1.2
Anche la definizione di limite non differisce dal caso di funzioni reali di variabile reale.
DEFINIZIONE 1.3 (continuità in un punto)
Diremo che la funzione f(z), definita in z0 è ivi continua se:
lim f ( z ) = f ( z0 )
z→ z
0
OSSERVAZIONE 1.3
Anche la definizione di continuità non si differenzia dalla analoga definizione per funzioni reali di variabile reale. Tuttavia le
conseguenze di tale definizione per funzioni complesse sono molto più stringenti dio quelle relative a funzioni reali come tra poco si
vedrà. Tuttavia prima di passare ad esaminare le funzioni continue è necessario fare qualche precisazione sugli insiemi I su cui è
definita una funzione complessa. Si avvisa il lettore comunque che nelle precisazioni sugli insiemi non vi è alcun tentativo di
precisione formale, ma si intende soltanto fornire indicazioni in larga misura "intuitive" su detti insiemi.
DEFINIZIONE 1.4 (circuito)
Nel piano di Gauss x, y (x reale e y parte immaginaria) definiamo circuito una curva data in forma parametrica da due funzioni:
x( t ) e y( t )
t ∈ a, b
che soddisfino alle seguenti condizioni:
1.
2.
3.
x(t) e y(t) continue in [a, b];
x(a) = x(b) e y(a) = y(b);
se x(t1) = x(t2) e y(t1) = y(t2) allora ne consegue che t1 = a e t2 = b (ossia non esistono nella curva punti multipli).
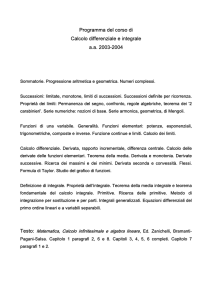
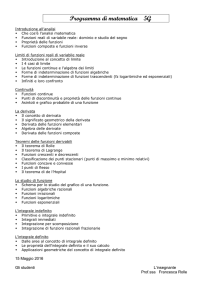
Un circuito divide il piano di Gauss in due parti che chiameremo parte interna e parte esterna, come descritto in fig. D.1.1.
circuito
OSSERVAZIONE 1.4
(parte immaginaria)
Nel circuito possiamo definire un verso di
percorrenza; tale verso sarà quello "antiorario"
nel senso che percorrendo il circuito nel verso
positivo si lascia la "parte interna" alla propria
sinistra.
y
parte interna
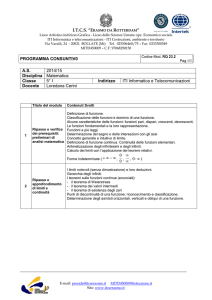
OSSERVAZIONE 1.5
Possono essere definiti più circuiti in un piano di
Gauss. In particolare può essere definito un
circuito ed alcuni altri i cui punti appartengono
alla "parte interna" del primo circuito, senza
x (parte reale)
alcuna intersezione tra loro. L'insieme di circuiti
ridefinisce la "parte interna" e la "parte esterna"
fig. D.1.1 circuito in un piano di Gauss
come descritto, senza ulteriori definizioni
formali, in fig. D.1.2. Si noti che i versi positivi
di percorrenza di ciascun circuito sono scelti in
maniera tale da lasciare sempre alla sinistra la "parte interna" del piano di Gauss individuata dai diversi circuiti. La "parte interna"
altro non è che un insieme chiuso o aperto a
circuiti
seconda che i punti dei circuiti appartengano o
meno a detto insieme. Di tale tipo saranno tutti
gli insiemi su cui riterremo venga definita una
funzione complessa.
parte esterna
OSSERVAZIONE 1.6
(parte immaginaria)
y
Un circuito può comprendere anche il "punto
all'infinito". e ciò accade quando i numeri
complessi
identificati
dalle
equazioni
parametriche date dalla definizione 1.4 sono a
norma non limitata. In tal caso anche la "parte
interna al circuito" contiene numeri complessi
non limitati in norma. Tale parte interna quindi
non può più essere identificata per la sua
limitatezza (come negli esempi riportati nelle
parte esterna
figure riportate), ma viene identificata dal solo
verso di percorrenza della frontiera che lascia la
"parte interna" alla sua sinistra. Ricordiamo
x (parte reale)
inoltre che nel piano complesso si considera un
solo punto all'infinito, indipendentemente dalla
fig. D.1.2 insieme delimitato da più circuiti
direzione
"geometrica"
(che
rappresenta
l'argomento del numero complesso divergente)
con cui il numero complesso tende all'infinito. Il
"punto all'infinito" apparterrà quindi all'insieme in esame se vi appartengono tutti gli altri punti della frontiera.
parte interna
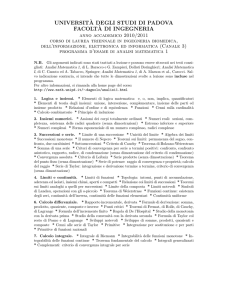
DEFINIZIONE 1.5 (ordine di connessione di un insieme del piano complesso)
Diremo che un insieme I di punti del piano complesso, come precedentemente definito ha ordine di connessione "1", o è
semplicemente connessa, se qualunque sia la curva continua costituita da punti interni all'insieme (e che "taglia" quindi la parte
interna) ed unente due punti estremi appartenenti alla sua frontiera, questa divide l'insieme I in due "parti interne" delimitate da due
circuiti aventi a comune la curva in oggetto. Diremo infine che l'insieme I ha ordine di connessione "n" se "n-1" è il minimo numero
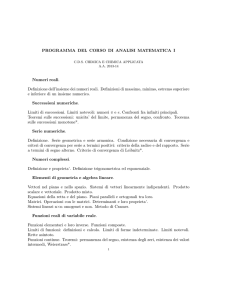
di "tagli" necessari a renderlo semplicemente connesso: La figura D.1.3 descrive esempi di insiemi ripspettivamente semplicemente
connesso (o con ordine di connessione 1), con ordine di connessione 2 e con ordine di connessione 3. In queste figure è anche
descritto il massimo numero di tagli che consentono di non perdere la connessione dell'insieme. Si osservi che quando sono stati
effettuati gli opportuni "tagli" per rendere l'insieme semplicemente connesso, questi vengono percorsi due volte, in senso inverso
allorchè si percorra la frontiera dell'insieme semplicemente connesso ottenuto, in senso positivo (ossia lasciando la parte interna alla
sinistra).
y
insieme con connessione
DEFINIZIONE 1.6 (derivata di una funzione in un punto z0)
Sia f(z) una funzione continua nel punto z0 interno ad un insieme I
come precedentemente definito. Se comunque tenda a 0 il valore
complesso h esiste ed è sempre uguale il limite del rapporto
incrementale:
f ( z0 + h ) − f ( z0 )
(D.1.2) lim
h→ 0
h
di ordine 1
x
y
tale limite verrà detto derivata di f(z) in z0 .
insieme con connessione
di ordine 2
x
y
insieme con connessione
OSSERVAZIONE 1.7
La definizione di derivata ora data è perfettamente analoga alla
definizione nel caso di funzioni reali; essa tuttavia come già
preannunciato è molto più stringente in quanto prevede che il limite
espresso dalla (D.1.2) debba esistere ed essere sempre uguale
comunque h tenda a 0. In particolare tale limite deve essre uguale sia
che h tenda a 0 per valori reali, sia che tenda a 0 per valori puramente
immaginari. Se imponiamo la condizione descritta per l'esistenza della
derivata si ottengono delle condizioni certamente necessarie per la
derivabilità di una funzione in un punto. Vale infatti il seguente
teorema.
di ordine 3
TEOREMA 1.1
x
Siano u(x,y) e v(x,y) due funzioni reali delle variabili reali x e y. Tali
funzioni costituiscano la parte reale ed immaginaria di una funzione
f(z) complessa della variabile complessa z = x+j⋅y, ossia vale:
(D.1.3) f ( z ) = f ( x + j ⋅ y ) = u( x , y ) + j ⋅ v( x , y )
fig. D.1.3 Esempi di insiemi con diverso
ordine di connessione
Se f(z) è derivabile in z0 = x0 + j⋅y0
ammettono derivate parziali prime in (x0,y0) che devono soddisfare inoltre alle relazioni:
⎧∂ u
∂v
=
⎪
x
y z
∂
∂
⎪
z
⎪
(D.1.4)
⎨
⎪
⎪∂u = − ∂v
⎪∂ y
∂x z
z
⎩
0
allora sia u(x,y) che v(x,y)
0
0
0
Le (D.1.4) vengono chiamate (con Cauchy) condizioni di monogeneità.
Dimostrazione
Posto nei due casi:
h1 = ∆ x
devono essere uguali i seguenti limiti:
lim
h →0
1
e
h2 = j ⋅ ∆ y
f ( z0 + h1 ) − f ( z0 )
f ( z0 + h2 ) − f ( z0 )
= lim
h →0
h1
h2
2
ed esprimendo quest'ultima relazione in termini della parte reale ed immaginaria di f(z) si ottiene:
u( x0 + ∆ x , y0 ) − u( x0 , y0 ) + j v( x0 + ∆ x , y0 ) − v( x0 , y0 )
lim
=
∆x → 0
∆x
u( x0 , y0 + ∆ y ) − u( x0 , y0 ) + j v( x0 , y0 + ∆ y ) − v( x0 , y0 )
= lim
=
∆y → 0
j⋅∆ y
v( x0 , y0 + ∆ y ) − v( x0 , y0 ) − j u( x0 , y0 + ∆ y ) − u( x0 , y0 )
= lim
∆y → 0
∆y
Ossia devono esistere i limiti suddetti e quindi tutte le derivate parziali di u e di v ed inoltre una semplice ispezione mostra che
devono valere le (D.1.4).
OSSERVAZIONE 1.8
Con ovvio significato della simbologia adottata, le (D.1.4) vengono usualmente espresse nella seguente forma:
∂f 1 ∂f
= ⋅
(D.1.5)
∂x j ∂ y
Il teorema appena dimostrato dimostra la necessarietà delle condizioni di monogeneità affinchè una funzione f(z) sia derivabile in un
punto z0 . Tali condizioni tuttavia sotto ulteriori ipotesi abbastanza leggere risultano anche sufficienti per assicurare la derivabilità
della funzione. Vale infatti il seguente teorema:
TEOREMA 1.2
Se u(x,y) e v(x,y) ammettono derivate parziali in un intorno circolare di (x0, y0) continue in tale punto e se ivi sono soddisfatte le
condizioni di monogeneità, allora la funzione f(z) = f(x+j⋅y) = u(x,y)+j⋅v(x,y) è ivi derivabile e la sua derivata vale:
⎛ ∂u
∂v ⎞ 1 ⎛ ∂u
∂v ⎞
+ j⋅
+ j⋅
f ′( z0 ) = ⎜
⎟ = ⋅⎜
⎟
∂y⎠ j ⎝∂y
∂y⎠
⎝∂x
Dimostrazione
Non se ne dà la dimostrazione (vedi G. Sansone "lezioni sulla teoria delle funzioni di una variabile complessa" CEDAM - Padova)
DEFINIZIONE 1.7 (funzione olomorfa)
Sia f(z) una funzione definita in un insieme I aperto e connesso. Diremo che f(z) è olomorfa in I se è derivabile in un qualunque
punto di I.
OSSERVAZIONE 1.9
Una funzione olomorfa in I deve ovviamente soddisfare la (D.1.5) in ogni punto dell'insieme I. Vale anche l'inverso (che si riporta
senza dimostrazione): se una funzione soddisfa la (D.1.5) in tutto un insieme I aperto e connesso è ivi olomorfa.
Funzioni olomorfe in tutto I sono quindi tutte e sole le funzioni che soddisfano le condizioni di monogeneità in I. Dimostreremo nel
seguito, in maniera indipendente dalle affermazioni della presente osservazione che in tal caso la funzione olomorfa f(z) è
infinitamente derivabile in ogni punto di I, e quindi che la sua parte reale ed immaginaria u(x,y) e v(x,y) ammettono tutte le derivate
parziali di ogni ordine. Accettando per il momento tale risultato riprendiamo in considerazione le condizioni di monogeneità
descritte dalle (D.1.4). Da esse si possono ottenere due nuove relazioni:
• deriviamo la prima delle (D.1.4) rispetto a x e la seconda rispetto a y e quindi sommiamo.
• deriviamo la prima delle (D.1.4) rispetto a y e la seconda rispetto a x e quindi sottraiamo la seconda dalla prima.
Si ottiene quindi:
∂ 2u
⎧ ∂ 2u
⎪∂ x2 + ∂ y 2 = 0
⎪
(D.1.6) ⎨ 2
2
⎪∂v + ∂v = 0
2
⎪⎩ ∂ x
∂y2
Si può concludere quindi che parte reale e parte immaginaria di una funzione olomorfa in I soddisfano in tale insieme all'equazione
di Laplace, o, come si suol dire, sono funzioni armoniche in I.
Lo studio quindi delle funzioni complesse olomorfe in I può essere ricondotto allo studio delle coppie di funzioni reali armoniche tra
loro non indipendenti in quanto devono soddisfare le condizioni di monogeneità. Coppie di funzioni di questo tipo vengono chiamate
funzioni armoniche coniugate.
Un'altra conclusione molto importante può essere tratta dalle precedenti considerazioni.
Sia infatti u(x,y) una funzione armonica in un insieme I semplicemente connesso, racchiuso da un circuito Γ. Si può dimostrare che
l'equazione di Laplace ammette soluzione unica nell'insieme I una volta che la funzione u(x,y) è nota sul contorno Γ purchè ivi
continua. Una prima conclusione quindi consiste nel fatto che è sufficiente conoscere la parte reale di una funzione olomorfa sul
contorno di una regione semplicemente connessa per poter affermare di conoscere detta parte reale su tutto l'insieme. Per quanto poi
riguarda la parte immaginaria v(x,y) della funzione olomorfa, ricordiamo che essa è armonica coniugata di u(x,y) e deve quindi
soddisfare le condizioni di monogeneità date dalle (D.1.4) che riportiamo qui per comodità:
∂v
⎧ ∂u
⎪∂ x = ∂ y
⎪⎪
(D.1.4)
⎨
⎪ ∂u
∂v
⎪
=−
⎪⎩ ∂ y
∂x
Nota quindi la u(x,y) sono note quindi anche le derivate parziali della v(x,y) in particolare sul contorno, e ciò basta ad affermare (vedi
Sansone, opera già citata) che la v(x,y) è determinata in tutto I a meno di una costante.
Si può quindi concludere che: una funzione olomorfa in tutto un dominio I semplicemente connesso è nota a meno di una costante
puramente immaginaria allorchè si conosce la sua parte reale sul contorno del dominio I.
Con ragionamento perfettamente analogo possiamo anche concludere che: una funzione olomorfa in tutto un dominio I
semplicemente connesso è nota a meno di una costante reale allorchè si conosce la sua parte immaginaria sul contorno del
dominio.
Il lettore ricordi tali conclusioni che risulteranno utili allorchè si affermerà che la risposta armonica di un sistema costituisce uno dei
modi di descrivere compiutamente il sistema.
Diamo infine un risultato largamente "intuitivo" che non viene tuttavia dimostrato per la sua onerosità e che deriva dal cosiddetto
problema esterno di Dirichlet. Tale risultato assicura l'unicità di una funzione olomorfa quando essa è assegnata in tutto un insieme
aperto I'. Il risultato sarà utile in seguito quando si tratterà di estendere una funzione olomorfa definita in opportuno insieme a punti
esterni ad esso.
y
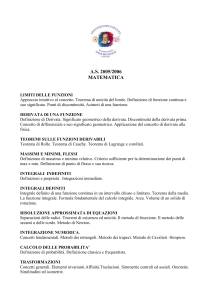
TEOREMA 1.3
I
Siano f1(z) e f2(z) due funzioni olomorfe in un insieme I
semplicemente connesso, e tali funzioni assumano gli stessi valori
in un suo sottoinsieme aperto I' (vedi fig. D.1.4); allora f1(z) e f2(z)
coincidono in tutto I
I'
DEFINIZIONE 1.8 (integrale di una funzione di variabile
complessa)
Siano:
x
(D.1.7)
x( t ) e y( t )
t ∈ a, b
fig. D.1.4 Descrizione di due insiemi semplicemente
connessi l'uno interno all'altro.
le equazioni parametriche di una curva Γ completamente contenuta
nell'insieme I ove è definita una funzione f(z) (vedi fig. D.1.5); Sia
inoltre t0 = a, t1, t2, .....tn-1, tn = b una successione monotona crescente di valori della variabile reale t. Tale successione individua
attraverso le equazioni parametriche (D.1.7) una successione di punti complessi:
z0 = x( a ) + j ⋅ y( a )
z1 = x( t1 ) + j ⋅ y( t1 )
z 2 = x ( t 2 ) + j ⋅ y ( t2 )
•
(D.1.8)
•
z n − 1 = x ( t n − 1 ) + j ⋅ y ( tn − 1 )
zn = x ( b ) + j ⋅ y( b )
Siano infine ξ1, ξ2, .....ξn una qualunque successione di punti complessi
appartenenti a Γ ed individuati da valori di t pari a τi [ti-1 <τi <ti ].
Costruiamo ora la somma:
y
zn
Γ
z0
z1 z2
zn-2
(D.1.9)
n
∑ f ( ξ i ) ⋅ ( zi − zi − 1 )
i =1
zn-1
Se qualunque sia la scelta di t0 = a, t1, t2, .....tn-1, tn = b e di ξ1, ξ2, .....ξn e
comunque tendano le lunghezze degli archi di curva individuati dai punti zi la
somma (D.1.9) tende ad un valore limite, chiameremo tale valore integrale di f(z)
lungo la linea Γ e lo indicheremo con:
(D.1.10)
∫ f ( z )dz
x
fig. D.1.5 integrazione su una linea
Γ
Γ
OSSERVAZIONE 1.10
Per quanto riguarda il calcolo dell'integrale, si osservi che se la funzione f(z) è espressa da: f(z) = u(x,y) + j⋅v(x,y) e la linea Γ dalle
equazioni parametriche (D.1.7), la sommatoria (D.1.9) assume la forma:
∑ [u ( x( τ ), y ( τ )) + j ⋅ v ( x( τ ), y ( τ ))] ⋅ [( x( t ) + j ⋅ y ( t )) − ( x( t
n
i
i =1
=
i
i
i
i
i
i −1
]
) + j ⋅ y ( t i −1 )) =
∑ [u ( x( τ ), y ( τ )) ⋅ ( x( t ) − x( t )) − v ( x( τ ), y ( τ )) ⋅ ( y ( t ) − y ( t ))] +
n
i
i =1
i
i −1
i
i
i
i −1
i
[
]
+ j ⋅ ∑ u ( x( τ i ), y ( τ i )) ⋅ ( y ( t i ) − y ( t i − 1 )) + v ( x( τ i ), y ( τ i )) ⋅ ( x( t i ) − x( t i − 1 ))
n
i =1
per cui, passando al limite otteniamo:
∫ f ( z )dz = ∫ [u ( x( τ ), y ( τ )) ⋅ x ′( τ ) − v ( x( τ ), y ( τ )) ⋅ y ′( τ )] dτ +
b
(D.1.11)
Γ
a
b
[
]
+ j ⋅ ∫ u ( x( τ ), y ( τ )) ⋅ y ′( τ ) + v ( x( τ ), y ( τ )) ⋅ x ′( τ ) dτ
a
La (D.1.11) può anche essere espressa come la somma di due integrali di forme differenziali:
(D.1.12)
∫ f ( z )dz = ∫ [u( x , y ) dx − v ( x , y ) dy ] + j ⋅ ∫ [v ( x , y ) dx + u( x , y ) dy ]
Γ
Γ
Γ
Infine dalla definizione di integrale di funzione di variabile complessa discendono immediatamente le seguenti proprietà la cui
banale dimostrazione si lascia al lettore:
• La linea Γ definita dalle (D.1.7) è una linea orientata. L'integrale di una funzione lungo tale linea dipende dal suo orientamento;
anzi è immediato concludere dalla definizione di integrale che se si inverte l'orientamento della linea Γ (ottenendo quindi una
linea "diversa" che possiamo chiamare -Γ) l'integrale cambia di segno.
• se la linea Γ è costituita dalla giustapposizione di diversi tronchi orientati Γ, Γ,......Γ in cui l'origine di un tronco coincide con il
termine del precedente, allora vale:
(D.1.13)
∫ f ( z )dz = ∑ ∫ f ( z )dz
Γ
i
Γi
Ci interesseremo ora delle proprietà degli integrali di funzioni olomorfe.
A tale proposito vale il seguente importante teorema che viene usualmente chiamato teorema integrale di Cauchy.
TEOREMA 1.4 (teorema integrale di Cauchy)
Sia f(z) una funzione olomorfa in tutta una regione comprendente un circuito chiuso Γ, allora l'integrale lungo Γ della f(z) è nullo.
Dimostrazione
E' sufficiente dimostrare che entrambi gli integrali delle forma differenziali presenti nella (D.1.12) sono nulli. Infatti se esaminiamo
la parte reale di detta formula integrale (e che riportiamo per comodità):
⎛
⎞
ℜ⎜ ∫ f ( z )dz⎟ = ∫ [u( x , y ) dx − v ( x , y ) dy ]
⎝Γ
⎠ Γ
ricordando la formula di Green e tenendo conto delle condizioni di monogeneità, valide per ipotesi in tutto il dominio racchiuso da Γ
, si ottiene:
⎡ ∂ u ∂v ⎤
⎛
⎞
ℜ⎜ ∫ f ( z )dz⎟ = ∫ [u( x , y ) dx − v ( x , y ) dy ] = − ∫∫ ⎢
+
⎥dx ⋅ dy = 0
⎝Γ
⎠ Γ
∂x ⎦
I ⎣∂y
Calcolo perfettamente analogo per la parte complessa dell'integrale.
OSSERVAZIONE 1.11
Conseguenza immediata del teorema integrale di Cauchy è che in un dominio semplicemente connesso l'integrale di una funzione
olomorfa lungo una linea dipende solo dai suoi punti estremi e non dal percorso della linea. Infatti se prendiamo due qualunque linee
Γ1 e Γ2 aventi a comune gli estremi a e b (fig. D.1.6) l'integrale lungo la linea chiusa costituita dalle due linee è nullo e vale:
0 = ∫ f ( z )dz = ∫ f ( z )dz + ∫ f ( z )dz = ∫ f ( z )dz − ∫ f ( z )dz
Γ
Γ1
− Γ2
Γ1
Γ2
da cui ovviamente deriva l'uguaglianza degli integrali effettuati lungo due linee diverse. In tal caso inoltre diventa non ambigua la
scrittura:
b
∫ f ( z )dz = ∫ f ( z )dz
(D.1.14)
Γ1
y
DEFINIZIONE 1.9 (funzione integrale)
b
Γ1
a
Sia I un insieme semplicemente connesso in cui f(z) sia olomorfa.
Assegnato un qualunque punto a di I la funzione di z:
z
Γ2
a
(D.1.15)
F( z ) = ∫ f ( ξ )dξ
a
viene chiamata funzione integrale di f(z).
OSSERVAZIONE 1.12
x
fig. D.1.6 Esempio di percorsi diversi unenti gli stessi
punti "a" e "b"
La (D.1.15) definisce effettivamente una funzione ad un solo valore nel
caso in cui la variabile z si muova in un dominio semplicemente connesso,
e ciò è assicurato dal teorema integrale di Cauchy (osservazione 1.11).
Qualora invece il dominio di definizione I non sia semplicemente
connesso la (D.1.15) definisce una relazione tra i punti complessi del
y
dominio I ed il campo complesso in cui l'immagine di un singolo z∈I è
Γ
1
costituita da una infinità numerabile di valori complessi.
Γ2
Infatti, se il dominio I non è semplicemente connesso (vedi fig. D.1.7),
Λ1
allora
l'integrale lungo una linea chiusa la cui parte interna non costituisce
A
B
Λ2
tutta zona di olomorfia della f(z) non sarà in generale nullo; esso però sarà
uguale all'integrale lungo una qualunque altra linea chiusa che circonda
gli stessi punti ove la f(z) non è olomorfa. Si consideri infatti la fig. D.1.7
ove è rappresentato un insieme non semplicemente connesso in cui si
supponga che f(z) sia olomorfa. Si considerino poi due qualunque circuiti
x
fig. D.1.7 Esempio di circuiti circondanti una zona di non
che circondano entrambi la zoona di non olomorfia. Se si unisccono tali
olomorfia e percorso di integrazione per dimostrare
circuiti con due altre linee confluenti negli stessi punti dei due circuiti
l'uguaglianza dell'integrale lungo due circuiti.
otteniamo un nuovo circuito dato dai precedenti più le due linee che
racchiude in sè una zona in cui la f(z) è sicuramente olomorfa.L'integrale
lungo tale circuito è allora nullo e poichè gli integrali lungo le due linee aggiunte si compensano esattamente ciò significa che la
somma dei due integrali lungo i due circuiti originari è nulla; ma i due circuiti vengono percorsi in senso inverso durante
l'integrazione e ciò basta a concludere che gli integrali lungo i due circuiti (percorsi nello stesso senso) sono uguali. In formule,
considerando il circuito, partendo dal punto A:
-Γ1, Λ2, Γ2, Λ1 (ricordando che il primo circuito ha il segno negativo in quanto tutto percorso in senso orario) vale:
B
0=
A
∫ f ( z )dz + ∫ f ( z )dz + ∫ f ( z )dz + ∫ f ( z )dz = ∫ f ( z )dz + ∫ f ( z )dz =
− Γ1
Γ2
A
B
− Γ1
Γ2
= ∫ f ( z )dz − ∫ f ( z )dz
Γ2
Γ1
Una tra le ovvie conclusioni che si possono trarre è che in questo caso non si può parlare di funzione integrale.
DEFINIZIONE 1.10 (modulo di periodicità)
Si dice modulo di periodicità di un insieme S in cui esistono punti di non olomorfia della funzione f(z) il valore assunto dall'integrale
di f(z) lungo un qualunque circuito (percorso in senso antiorario) contenente al suo interno tutti e soli i punti di non olomorfia
appartenenti all'insieme S. Il modulo di periodicità viene indicato col simbolo ω.
OSSERVAZIONE 1.13
Il modulo di periodicità è associato ad un insieme S contenente punti di non olomorfia della funzione f(z). La definizione è ben posta
perchè con ragionamento perfettamente analogo a quello dell'osservazione 1.11 si possono dimostrare le seguenti affermazioni:
• L'integrale lungo circuiti contenenti all'interno gli stessi punti di non olomorfia è il medesimo.
• il modulo di periodicità gode della proprietà additiva, nel senso che se a due insiemi S1 e S2 ad intersezione nulla corrispondono
due moduli di periodicità, allora all'insieme unione corrisponde la somma dei moduli di periodicità. La dimostrazione di tale
affermazione si conduce in maniera perfettamente analoga a quanto riportato in osservazione 1.11.
Alla fine di tale discussione possiamo concludere che nel caso in cui l'insieme I è non semplicemente connesso, è ancora possibile
definire una relazione integrale data da:
z
(D.1.16)
F( z ) = ∫ f ( ξ )dξ
a
che associa ad ogni valore della variabile z tutto un insieme di valori complessi dati da:
F ( z ) = F * ( z ) + n1 1 + n2 2 + ....... + nr r
(D.1.17)
ove F*(z) è uno qualunque dei valori assunti dall'integrale (D.1.16), ωi sono i moduli di periodicità relativi agli insiemi Si in cui f(z)
non è olomorfa e ni sono interi qualunque (positivi o negativi).
Ritorniamo comunque ora a considerare la funzione integrale e quindi all'espressione (D.1.15) nel caso in cui l'insieme di
definizione della f(z) sia un insieme semplicemente connesso. Nel caso di funzioni reali vale la proprietà che la derivata della
funzione integrale è uguale alla funzione integranda. Una tale proprietà vale anche per le funzioni integrali di funzioni complesse,
come dimostra il prossimo teorema.
TEOREMA 1.5
Sia f(z) una funzione olomorfa in tutto un insieme I semplicemente connesso, e sia:
z
F( z ) = ∫ f ( ξ )dξ
a
una sua funzione integrale, con z punto interno ad I. La funzione integrale allora è continua e derivabile in z e la sua derivata vale:
⎡z
⎤
d ⎢ ∫ f ( ξ )dξ ⎥
a
⎣
⎦ = f(z)
z+h
(D.1.18)
dz
z*
y
z
Dimostrazione
Si consideri il rapporto incrementale della funzione integrale in esame:
Γ
F( z + h ) − F( z )
=
h
a
x
fig. D.1.8 Calcolo del rapporto incrementale di una
funzione integrale.
z+h
z
a
a
∫ f ( ξ )dξ − ∫ f ( ξ )dξ
h
z+h
=
∫ f ( ξ )dξ
z
h
L'ultimo integrale, essendo indipendente dal percorso di integrazione
può essere pensato esteso al tratto rettilineo tra z e z+h. Inoltre, poichè
vale certamente:
h 1 z +h
f ( z ) = f ( z ) ⋅ = ⋅ ∫ f ( z )dξ
h h z
sottraendo membro a membro le due uguaglianze e calcolandone il modulo si ottiene:
F( z + h ) − F( z )
1 z+h
− f(z) =
⋅ ∫ (f ( ξ ) − f ( z ))dξ ≤
h
h z
≤
1
⋅ h ⋅ f ( z* ) − f ( z ) = ε
h
ove z* è un punto complesso lungo il tratto rettilineo congiungente z e z+h .La disuguaglianza è vera perchè l'integrale in oggetto è
appunto calcolato lungo un percorso rettilineo e se ne può dare una dimostrazione quindi perfettamente analoga a quella del lemma
del Rolle per funzioni reali. In conclusione la quantità ε può essere resa piccola a piacere scegliendo h sufficientemente piccolo in
modulo (e ciò per la continuità della funzione f(z)), per cui il limite per h che tende a 0 della prima quantità è nullo da cui quindi la
tesi.
OSSERVAZIONE 1.14
Si osservi che la dimostrazione data ora vale anche nel caso di relazioni integrali date dalla (D.1.16) quando il campo di definizione
della f(z) non è semplicemente connesso. In questo caso non si parlerà di derivata ma semplicemente di limite del rapporto
incrementale.
OSSERVAZIONE 1.15
A chisura delle precedenti considerazioni sulla funzione integrale e relazione integrale delle funzioni olomorfe si fa osservare al
lettore che questa estrema sintesi della teoria sulle funzioni complesse è molto simile, per non dire analoga, alla teoria sviluppata in
Fisica sui campi vettoriali irrotazionali in domini semplicemente o meno connessi che ammettono quindi un potenziale monodromo
o polidromo a seconda che non esistano o esistano insiemi di non irrotazionalità del campo vettoriale. La similitudine discende
dall'uguaglianza delle condizioni di monogeneità per una funzione complessa olomorfa con le condizioni di rotazionalità nulla per un
campo vettoriale.
Ritorniamo ora alla teoria delle funzioni complesse.
E' già stato detto che una funzione olomorfa in tutto un dominio semplicemente connesso è nota allorchè la si conosca solo sul suo
contorno. Deve quindi esistere una metodologia di calcolo della funzione f(z) in un qualunque punto interno al dominio quando la
funzione sia nota solo sul contorno. A tale problema risponde la formula integrale di Cauchy enunciata nel seguente teorema:
TEOREMA 1.6
Sia f(z) una funzione olomorfa in tutto un insieme I semplicemente connesso, contorno Γ incluso, e sia a un punto complesso interno
a detto insieme. Vale allora la seguente formula integrale di Cauchy:
1
f ( ξ)
(D.1.19)
f (a) =
dξ
∫
2π j Γ (ξ − a )
Dimostrazione
La funzione:
∧
f (z)=
f (z)
z−a
è olomorfa ovunque in I escluso il punto a. E' comunque ovvio che il suo integrale lungo il contorno Γ o lungo la circonferenza γ di
centro a e raggio qualunque ρ sia il medesimo (vedi figura D.1.9). Inoltre su γ, effettuando il cambio di variabile:
( z − a ) = ⋅ e j
l'integrale può essere espresso nella seguente forma:
1
1
1
f ( ξ)
f ( ξ)
dξ =
dξ =
∫
∫
2 π j Γ (ξ − a)
2 π j γ (ξ − a)
2π
2π
∫ f ( a + ρe
jθ
)dθ
0
E poichè vale certamente:
f (a) =
y
ξ
θ
a
ρ
γ
Γ
x
fig. D.1.9 Descrizione del calcolo della formula
integrale di Cauchy
1
2π
2π
∫ f ( a )dθ
0
Sottraendo le ultime relazioni membro a membro si ottiene:
f ( ξ)
1
1 2π
jθ
dξ − f ( a ) =
∫
∫ [f ( a + ρe ) − f ( a )]dθ
2 π j Γ (ξ − a)
2π 0
ed è facile dimostrare che il numero complesso a destra del
segno di uguale può essere reso piccolo in modulo a piacere, da
cui si conclude che:
f ( ξ)
1
f (a) =
dξ
∫
2π j Γ (ξ − a)
OSSERVAZIONE 1.16
La formula integrale di Cauchy consente anche il calcolo della derivata di f(z) in ogni punto interno al dominio di definizione
semplicemente connesso, a partire sempre dalla conoscenza di f(z) sul contorno. Anzi consente il calcolo delle derivate di ogni ordine
con implicita dimostrazione della infinita derivabilità delle funzioni olomorfe in un dominio semplicemente connesso. Il prossimo
teorema descrive tale punto.
TEOREMA 1.7
Una funzione olomorfa in un dominio semplicemente connesso con contorno Γ è ivi infinitamente derivabile e la derivata di ordine n
nel generico punto z vale:
n!
f( ξ)
f ( n )( z ) =
dξ
(D.1.20)
2 π j ∫Γ ( ξ − a )n + 1
Dimostrazione
La dimostrazione avviene per induzione completa.
• La (D.1.20) vale per n = 0. Infatti essa si riduce alla formula integrale di Cauchy.
• Supposta valida la (D.1.20) per il generico n, dimostriamo che vale anche per n+1. Infatti, detto z il generico punto complesso e
z' = z + h con h icremento della variabile, il rapporto incrementale della derivata di ordine n vale:
f ( n )( z + h ) − f ( n )( z ) 1 ⎡ n !
= ⋅⎢
h
h ⎣ 2π j
1 n!
= ⋅
h 2π j
∫
f ( ξ)
∫ (ξ − z − h)
Γ
f ( ξ ) ⋅ [( ξ − z )n + 1 − ( ξ − z − h )n + 1 ]
( ξ − z − h )n + 1 ⋅ ( ξ − z ) n + 1
Γ
f ( ξ ) ⋅ ∑ [( ξ − z )i ⋅ ( ξ − z − h )n − i ]
n +1
dξ −
n!
2π j
f ( ξ)
∫ (ξ − z)
Γ
n +1
⎤
dξ ⎥ =
⎦
f ( ξ ) ⋅ h ⋅ ∑ [( ξ − z )i ⋅ ( ξ − z − h )n − i ]
n
n! 1
dξ =
⋅
2π j h
∫
i =0
( ξ − z − h ) n + 1 ⋅ ( ξ − z )n + 1
Γ
dξ =
n
n!
=
⋅∫
2π j Γ
i =0
( ξ − z − h ) n + 1 ⋅ ( ξ − z )n + 1
dξ
e, passando al limite per h → 0 comunque, si ottiene:
n ! f ( ξ ) ⋅ ( n + 1) ⋅ ( ξ − z )n
( n + 1) !
f ( n + 1) ( z ) =
dξ =
∫
2π j Γ
2π j
( ξ − z )2 n + 2
f ( ξ)
∫ (ξ − z)
Γ
n +2
dξ
E si chiude così la dimostrazione dell'esistenza della derivata di ogni ordine e della validità della (D.1.20).
OSSERVAZIONE 1.17
Dimostrata l'esistenza di ogni derivata di una funzione olomorfa, siamo ora in grado di esprimere la f(z) mediante uno sviluppo in
serie di potenze nell'intorno di un suo punto di olomorfia, in maniera perfettamente analoga a quanto accade per una funzione reale.
Vale infatti il seguente teorema.
TEOREMA 1.8 (sviluppo in serie di Taylor Cauchy)
Sia f(z) una funzione olomorfa in un insieme I (anche non semplicemente connesso) e sia a un suo punto interno. In opportuno
intorno di a la seguente serie di potenze:
+∞
f ( n )( a ) ⎫
⎧
cn ⋅ ( z − a )n
(D.1.21)
⎨cn =
⎬
∑
n=0
n! ⎭
⎩
converge totalmente e quindi uniformemente a f(z).
Dimostrazione
Se a è un punto interno a I ove f(z) è olomorfa, esiste certamente un intorno circolare di a tutto contenuto in I (vedi fig. D.1.10).
y
Sia z un punto interno a detto intorno circolare e ξ il punto corrente sulla
circonferenza. Vale ovviamente:
1
1
1
1
=
=
⋅
(D.1.22)
( ξ − z ) ( ξ − a ) − ( z − a ) ( ξ − a ) 1− ( z − a )
( ξ − a)
ξ
z
a
γ
E poichè:
Γ
q =
x
fig. D.1.10 Descrizione della metodologia per
lo sviluppo in serie.
( z − a)
<1
( ξ − a)
vale l'espansione in serie (anche nel campo complesso, con convergenza assoluta
!):
+∞
1
= ∑qn
1− q n =0
La (D.1.22) risulta quindi uguale a:
n
+∞
+∞
⎛ ( z − a)⎞
( z − a )n
1
1
=
⋅∑⎜
⎟ =∑
n +1
n =0 ( ξ − a )
( ξ − z ) ( ξ − a ) n=0 ⎝ ( ξ − a ) ⎠
da cui:
+∞
f ( ξ)
f ( ξ)
= ∑ ( z − a )n ⋅
( ξ − z ) n=0
( ξ − a )n + 1
ed integrando i due membri di tale uguaglianza lungo la circonferenza Γ, tenendo conto che la serie a secondo membro è totalmente
(e quindi uniformemente) convergente, per cui vale il teorema di integrazione per serie (non dimostrato in questi appunti nel piano
complesso !), tenendo conto della formula integrale di Cauchy (D.1.19) e della formula che dà la derivata di ogni ordine (D.20), si
ottiene:
+∞ ⎡
⎤
1
1
f ( ξ)
f ( ξ)
f(z) =
⋅∫
dξ = ∑ ⎢
⋅∫
dξ ⎥ ⋅ ( z − a ) n =
n +1
n=0
2π j Γ ( ξ − z )
⎦
⎣ 2π j Γ ( ξ − a )
=
+∞
∑
n=0
f ( n )( a )
⋅ ( z − a )n
n!
E ciò chiude la dimostrazione.
OSSERVAZIONE 1.18
Ogni funzione olomorfa in una regione I può quindi essere sviluppata in serie di potenze. A questo punto dobbiamo ammettere la
conoscenza da parte del lettore delle più importanti proprietà delle serie di potenze nel piano complesso, conoscenze che provengono
dai corsi di Analisi Matematica.
Si ricordano comunque tali proprietà senza dimostrazione.
1. Una serie di potenze converge totalmente all'interno di una circonferenza del piano complesso il cui raggio viene chiamato
raggio di convergenza della serie. Non converge invece in nessun punto all'esterno di detta circonferenza. Il comportamento
della serie sulla circonferenza di convergenza può essere il più disparato: può convergere in ogni punto del cerchio, può non
convergere in alcun punto, può convergere in alcuni punti della circonferenza.
2. Se due serie di potenze:
+∞
∑ an z n
+∞
∑ bn z n
e
n =0
3.
n =0
assumono gli stessi valori in un insieme infinito di punti avente l'origine come punto di accumulazione, allora le due serie
coincidono ovunque nel loro uguale raggio di convergenza, ossia: an = bn.(principio di identità).
Una serie di potenze:
+∞
∑ an z n =
f (z)
n=0
convergente all'interno di un cerchio di raggio non nullo, definisce ivi una funzione olomorfa f(z). Infatti vale il teorema di
derivazione per serie (in quanto una serie di potenze è totalmente convergente):
+∞
f ′( z ) = ∑ ( n + 1 ) ⋅ a n ⋅ z n
n =0
ed inoltre il raggio di convergenza della serie derivata è uguale al raggio di convergenza della serie originale. Esiste quindi, la
derivata di ogni ordine della funzione olomorfa definita dalla serie di potenze; vale anzi:
+∞
( n + k )!
f ( k )( z ) = ∑
⋅ an + k ⋅ z n
n!
n =0
con raggio di convergenza sempre uguale a quello della serie iniziale.
OSSERVAZIONE 1.19
Siamo ora in grado di definire una funzione olomorfa mediante serie di potenze. L'elegante costruzione è dovuta a Weiestrass cui è
dovuta la teoria delle funzioni complesse analitiche. Verrà proposta ora in maniera estremamente sintetica tale costruzione. Tuttavia,
prima di procedere alla descrizione di tale costruzione è bene premettere un risultato direttamente ottenibile dallo sviluppo in serie di
Cauchy-Taylor, simile a quello del teorema 1.3 che ha una più semplice dimostrazione.
TEOREMA 1.9
Se f(z) è una funzione olomorfa in un insieme I interno ad uno o più circuiti, e si annulla in un insieme infinito di punti distinti (che
ammettono quindi certamente un punto di accumulazione se, come nell'ipotesi, I è limitato), allora f(z) è nulla ovunque in I.
Dimostrazione
Sia a il punto di accumulazione in oggetto, certamente esistente. In a la funzione olomorfa f(z) è certamente nulla per motivi di
continuità, ed è ivi sviluppabile in serie di Taylor-Cauchy in un cerchio di opportuno raggio:
+∞
f ( z ) = ∑ cn ⋅ ( z − a )n
n =0
Poichè f(a) = 0 è certamente c0 = 0; Se poi nella successione {cn} esistesse un primo elemento ck non nullo, sarebbe allora:
+∞
f ( z ) = ( z − a )k ⋅ ∑ ck +i ⋅ ( z − a )i
i =0
e poichè in ogni punto z ≠ a, il fattore (z-a)k è certamente non nullo e ck è diverso da zero, esisterebbe per continuità tutto un intorno
di a in cui la f(z) è non nulla, contro l'ipotesi che a sia un punto di accumulazione dell'insieme in cui f(z) è nulla.
Quindi tutti i coefficienti {cn} sono nulli per cui f(z) è nulla in tutto il cerchio di centro a.
Assegnato ora un qualunque punto z di I è sempre possibile trovare una successione finita di cerchi con i seguenti requisiti:
1. il primo cerchio ha centro a;
2. ogni altro cerchio della successione ha centro interno al precedente;
3. l?ultimo cerchio comprenda al suo interno il punto z0 .
Con dimostrazione di tipo induttivo si può vedere che ogni centro di ciascun cerchio è punto di accumulazione di punti in cui f(z) è
nulla per cui tale funzione è nulla in tutto il cerchio in esame e quindi alla fine anche in z0 .
OSSERVAZIONE 1.20
E' di immediata dimostrazione a questo punto la seguente affermazione: se due funzioni olomorfe in un insieme interno ad uno o più
circuiti assumono lo stesso valore in un insieme infinito di punti (che ammette quindi un punto di accumulazione), allora tali funzioni
sono uguali ovunque.
Iniziamo ora la costruzione delle funzioni analitiche secondo Weiestrass.
DEFINIZIONE 1.11 (elemento analitico di Weiestrass)
Diremo elemento analitico di Weistrass con centro a una serie di potenze del tipo:
(D.1.23)
+∞
∑ cn ⋅ ( z − a )n
n =0
la quale converge certamente in tutti i punti di un cerchio di centro a il cui raggio è detto raggio di convergenza dell'elemento
analitico. Tale elemento analitico verrà indicato con P(z-a).
OSSERVAZIONE 1.21
Un elemento analitico definisce una funzione olomorfa all'interno del cerchio di convergenza ed inversamente una funzione
olomorfa in una regione I di cui a è un punto interno definisce un elemento analitico con centro a attraverso il suo sviluppo in serie
di Taylor-Cauchy. E' ovvio che la funzione olomorfa che definisce l'elemento analitico è uguale ai valori assunti dall'elemento
analitico stesso in ogni punto interno all'intersezione tra il suo cerchio di convergenza e la regione I. Si può ora estendere una
funzione olomorfa definita da un suo elemento analitico al di là del raggio di convergenza di detto elemento.
DEFINIZIONE 1.12 (prolungamento analitico)
Sia P(z-a) un elemento analitico che definisce quindi una funzione olomorfa f(z) nel cerchio di convergenza di P(z-a). Si scelga ora
un qualunque punto a1 ∈ P(z-a) e si costruisca il nuovo elemento analitico di centro a1 definito dallo sviluppo in serie di TaylorCauchy indotto dalla f(z). Tale nuovo elemento analitico P(z-a1) può avere una lunula esterna all'elemento analitico P(z-a) (vedi fig.
D.1.11). Diremo allora che P(z-a1) è un prolungamento analitico di P(z-a).
OSSERVAZIONE 1.22
Il teorema 1.9 assicura l'unicità della funzione olomorfa così definita nell'insieme di punti costituiti dall'unione dei punti complessi
relativi ai due elementi analitici. Si può quindi proseguire la costruzione della funzione olomorfa f(z) attraverso una qualunque
successione di elementi analitici tali che il centro di uno di essi sia interno all'elemento analitico precedente.
DEFINIZIONE 1.13 (funzioni analitiche)
Una funzione olomorfa f(z) definita da un elemento analitico di centro a è definita in un punto z0 se esiste una successione di
elementi analitici consecutivi (tali cioè che il centro di un suo qualunque elemento è interno al precedente) per cui l'ultimo elemento
(e quindi la successione deve essere finita) contiene al suo interno il punto z0
Chiameremo inoltre analitiche tutte le funzioni definite in tal modo.
OSSERVAZIONE 1.23
prima catena
elemento analitico iniziale
seconda catena
punti a comune delle due catene
fig. D.1.11 Esempio di due catene "disgiunte" aventi punti
a comune nei loro ultimi elementi.
Sorge tuttavia immediato un problema. Si
considerino due catene di elementi analitici
traenti origine da uno stesso elemento analitico,
costruite come ora detto, e vi siano elementi
analitici dell'una catena disgiunti da elementi
analitici dell'altra e viceversa. L'aggettivo
"disgiunto" significa che al più un elemento di
una catena può avere a comune con un elemento
dell'altra catena punti di frontiera, ma non vi sono
a comune punti interni ad un qualche elemento
(vedi fig.D.1.11); le due catene infine abbiano
ultimi elementi intersecantesi con punti interni a
comune. In tali punti interni sono definiti uguali
valori della funzione olomorfa?. La risposta in
generale è negativa, come viene dimostrato dal
seguente esempio.
Si consideri la serie di potenze:
+∞
∑c
n =0
n
⎧
⎪a = ρ ⋅ e jθ
⎪
⎨c0 = ln( ρ ) + j ⋅ ϑ
⎪
ρ− n e − jnθ
⎪cn = ( −1)n − 1
n
⎩
⋅ ( z − a )n
( n ≥ 1)
Tale serie converge sempre in un cerchio di centro a e di raggio ρ al valore [ln|z| + j⋅arg(z)]. (Di tale affermazione non se ne dà la
dimostrazione). Se tuttavia a partire dall'elemento analitico definito dalla precedente serie con centro 1 si costruiscono due catene di
elementi analitici, la prima che circonda l'origine per valori positivi della parte immaginaria e la seconda per valori negativi ed aventi
il punto -1 in comune tra gli ultimi due elementi analitici, allora il valore della funzione definita attraverso prolingamenti analitici è
+jπ se valutato attraverso la prima catena e -jπ se valutato attraverso la seconda catena. Si fa notare che l'elemento analitico in
oggetto definisce la funzione ln(z) che, come è noto è appunto una funzione a più valori.
In definitiva non si è certi del valore della funzione analitica definita attraverso prolungamenti analitici a partire da un iniziale
elemento di Weiestrass.
Possiamo quindi dividere le funzioni analitiche in due gruppi che chiameremo funzioni analitiche monodrome (o ad un sol valore) e
funzioni analitiche polidrome (o a più valori).
OSSERVAZIONE 1.24
Ogni funzione analitica quindi è definita da un suo elemento analitico, il quale viene poi esteso mediante elementi analitici
consecutivi ad altri punti del piano complesso. Ci si può domandare se in tal modo un qualunque elemento analitico definisce una
funzione (monodroma o polidroma) surgettiva su tutto il piano complesso. La risposta è in generale negativa, anche se esistono
funzioni definite da un elemento analitico surgettive su tutto il piano complesso. Vi saranno invece altre funzioni che non risultano
surgettive. Ad esempio l'elemento analitico con centro l'origine dato da:
+∞ n
z
∑ n!
n =0
ha raggio di convergenza infinito, ossia definisce una funzione olomorfa su tutto il piano complesso (per la dimostrazione della sua
convergenza ovunque basta ricorrere al teorema di Cauchy-Hadamard o a un qualche suo corollario) e tale funzione è (per
definizione !) la ben nota funzione esponenziale
Un esempio invece in cui la funzione olomorfa definita da un suo elemento analitico non è surgettiva è dato da:
+∞
∑ zn
n=0
Tale serie infatti non converge per |z| = 1, mentre converge per |z| < 1, come si può dimostrare ricorrendo al calcolo del limite di una
serie geometrica. Tale elemento analitico può essere esteso mediante la tecnica di Weiestrass e dà luogo alla funzione analitica:
1
f (z)=
1− z
tuttavia nella estensione non si troverà mai un elemento analitico che contenga il punto z = 1. In definitiva viene definita una
funzione analitica surgettiva su tutto il piano complesso meno il punto 1.
Vi sono quindi punti in cui l'estensione mediante elementi analitici non definisce la funzione analitica. Come ora definiremo tali
punti vengono detti punti critici o punti singolari della funzione analitica.
DEFINIZIONE 1.14 (punto singolare di una funzione olomorfa)
Sia P(z-a) un elemento analitico di una funzione olomorfa f(z) di centro a e sia z0 un punto del piano complesso tale che considerata
una linea regolare Γ congiungente a con z0 sia possibile definire la funzione olomorfa mediante estensione su tutti i punti di Γ (nel
senso che gli elementi analitici che effettuano l'estensione devono avere tutti centro in Γ ) escluso z0 . Allora il punto z0 si dirà punto
singolare della f(z).
OSSERVAZIONE 1.25
Dalla definizione 1.14 risulta che la singolarità di un punto z0 per una funzione olomorfa f(z) può dipendere dalla scelta della linea Γ
congiungente il punto a al punto z0 . In realtà se la definizione di punto singolare z0 prevede l'esistenza di una qualche linea Γ per cui
accade quanto definito sopra, sono comunque vere le seguenti affermazioni (senza dimostrazione!):
• Se la funzione olomorfa definita dal primo elemento analitico P(z-a) è monodroma, allora se z0 è punto singolare per una linea Γ
lo è anche per una qualunque altra linea.
• Se I è una regione semplicemente connessa, sprovvista di punti singolari, allora la funzione definita da un suo elemento
analitico è monodroma.
OSSERVAZIONE 1.26
Ci si può infine domandare per qual motivo un elemento analitico deve avere un ben determinato raggio di convergenza. A tale
quesito risponde la seguente proprietà che si enuncia senza dimostrazione:
Dato un qualunque elemento analitico, alla sua frontiera appartiene almeno un punto singolare della funzione olomorfa da esso
definita. E' pertanto ovvio che l'ampiezza dell'elemento analitico generico è limitata solo dal fatto che l'elemento non può includere
punti ove la funzione definita non è olomorfa.
La dimostrazione di tale affermazione può essere condotta considerando che se non esistesse alcun punto singolare sulla frontiera,
ciascuno di questi può essere centro di un nuovo elemento analitico, per cui esisterebbe un numero finito di tali elementi che coprono
completamente la frontiera (teorema di Heine-Pincherle-Borel), da cui la olomorfia e monodromia della funzione in un insieme più
ampio dell'elemento analitico, per cui la sviluppabilità in serie della funzione sarebbe garantita in un cerchio di raggio maggiore di
quello in ipotesi.
Consideriamo ora un punto singolare a isolato di una funzione olomorfa (monodroma). Ovviamente non esiste uno sviluppo in serie
di Taylor-Cauchy nell'intorno del punto, visto che ivi la funzione non è olomorfa. Esiste tuttavia uno sviluppo in serie bilatero, detto
sviluppo in serie di Laurent, come dimostra il prossimo importante teorema.
TEOREMA 1.10 (sviluppo in serie di laurent)
Sia a un punto del piano complesso e Γ1 e Γ2 due circonferenze di centro a con raggio di Γ1 maggiore di quello di Γ2. (vedi fig.
D.1.12) Sia inoltre f(z) una funzione olomorfa in tutta la corona circolare compresa tra le due circonferenze e continua sulla sua
frontiera. Vale allora il seguente sviluppo in serie in ogni punto z interno alla corona circolare:
+∞
⎧
⎫
1
f( ξ)
(D.1.24) f ( z ) = ∑ cn ⋅ ( z − a )n
⎨cn =
∫ ( ξ − a ) n + 1 dξ ⎬
z
n = −∞
π
2
j
Γ
⎩
⎭
1
ξ
Γ2
Dimostrazione
La funzione f(z) è per ipotesi olomorfa in tutta la corona circolare.
Tale dominio non è semplicemente connesso, tuttavia è facile renderlo
tale mediante un taglio, per cui in esso vale la formula integrale di
Cauchy che può così esprimersi in ogni punto interno alla corona
circolare:
1
1
f ( ξ)
f ( ξ)
f(z) =
⋅∫
dξ −
⋅∫
dξ
(D.1.25)
2π j Γ ( ξ − z )
2π j Γ ( ξ − z )
a
Γ1
1
fig. D.1.11 esemplificazione per il calcolo
dello sviluppo di Laurent
(D.1.26)
1
f ( ξ)
⋅∫
dξ =
2π j Γ ( ξ − z )
1
+∞
∑c
n =0
n
⋅ ( z − a )n
2
ove i due integrali vengono effettuati percorrendo le circonferenze in
senso antiorario. La f(z) quindi è costituita dalla somma di due addendi
il primo dei quali, con ragionamento identico a quello formulato in
occasione dello sviluppo in serie di Cauchy-Taylor vale:
⎫
⎧
1
f ( ξ)
⎨cn =
∫ ( ξ − a ) n + 1 dξ ⎬
2
π
j
Γ
⎭
⎩
1
Per esprimere opportunamente il secondo addendo si consideri che l'integrale in esso contenuto è effettuato lungo una linea Γ2 i cui
punti ξ distano dal centro a meno del punto z interno alla corona circolare, per cui:
(ξ − a )
<1
( z − a)
e quindi vale il seguente sviluppo in serie ove nell'ultimo passaggio si effettua il cambio di indice di sommatoria dato da:
n = -(n' + 1).
−
=
+∞
1
1
1
1
1
(ξ − a ) n ′
=−
=
⋅
=
⋅∑
=
(ξ − z )
(ξ − a ) − ( z − a ) ( z − a ) 1 − (ξ − a ) ( z − a ) n ′ = 0 ( z − a ) n ′
( z − a)
+∞
(ξ − a ) n ′
(ξ − a ) − ( n +1)
−n
n = −1 ( z − a )
−∞
∑ ( z − a )( n ′+1) = ∑
n ′= 0
Per cui il secondo addendo della (D.1.25) può essere espresso nella seguente forma:
−∞
−∞
1
1
f ( ξ)
f ( ξ)
(D.1.27) −
dξ = ∑
dξ ⋅ ( z − a ) n = ∑ c n ⋅ ( z − a ) n
⋅∫
⋅∫
( n + 1)
n = −1 2 π j
n = −1
2π j Γ ( ξ − z )
Γ ( ξ − a)
2
2
⎧
1
⎨cn =
2
π
j
⎩
f ( ξ)
∫ ( ξ − a)
Γ2
n +1
⎫
dξ ⎬
⎭
I coefficienti cn nella (D.1.27) sono espressi da integrali lungo la circonferenza interna, tuttavia, la funzione integranda è olomorfa in
tutta la corona circolare per cui lo stesso integrale effettuato lungo la circonferenza esterna dà luogo allo stesso risultato per il
teorema integrale di Cauchy. Sommando le (D.1.26) e (D.1.27), si ottiene l'espressione della f(z) come somma bilatera (per n che va
da - ∞ a + ∞) e quindi l'espressione dello sviluppo in serie di Laurent dato dalla (D.1.25).
OSSERVAZIONE 1.27
Si osservi che lo sviluppo in serie di Taylor-Cauchy è un caso particolare dello sviluppo in serie di Laurent, quando tutti i
coefficienti cn , con n negativo risultano nulli. E' immediato osservare che ciò accade quando la f(z) è olomorfa all'interno di tutta la
circonferenza di raggio maggiore. In tal caso infatti la funzione integranda dell'espressione di cn (per n negativo !) è certamente
olomorfa in tutto il cerchio e quindi il suo integrale è nullo (teorema integrale di Cauchy).
OSSERVAZIONE 1.28
Lo sviluppo in serie di Laurent consente di effettuare alcune considerazioni e di dare altre definizioni.
• Il punto a attorno a cui vale lo sviluppo di Laurent sarà un punto singolare se e solo se lo sviluppo ha un qualche coefficiente cn
(n negativo) non nullo. In tal caso il punto a oltre che a essere chiamato punto singolare, viene anche chiamato polo della f(z).
• Diremo che il punto a è un polo di ordine k se c-k ≠ 0 mentre tutti i coefficenti cn (n< -k) sono nulli.
• Diremo che il punto a è un polo essenziale (o una singolarità essenziale) se ∀k intero positivo grande quanto si vuole ∃n (n< -k)
tale che cn è non nullo.
• Se la funzione f(z) è olomorfa in a (ossia cn = 0 per n negativo) diremo che a è uno zero se c0 = 0.
• Se la funzione f(z) è olomorfa in a diremo che a è uno zero di ordine k se cn = 0 (per n<k) e ck ≠ 0.
• Diremo che la funzione f(z) ha una singolarità polare all'infinito di ordine k (o essenziale) se la funzione f(1/z) ha una singolarità
polare in 0 di ordine k (o essenziale).
• Diremo che la funzione f(z) (olomorfa all'infinito) ha uno zero di ordine k all'infinito se la funzione f(1/z) ha uno zero di ordine k
in 0.
Concludiamo ora questa breve rassegna con una ulteriore importante definizione e con una importante conseguenza.
DEFINIZIONE 1.15 (residuo polare relativo ad un polo)
Sia a un polo della funzione f(z). La funzione sia sviluppabile in serie di Laurent nell'intorno di a. Chiameremo residuo polare della
f(z) relativo al polo a la costante c-1 del suo sviluppo in serie di Laurent.
TEOREMA 1.11
Sia f(z) olomorfa in tutti i punti di una regione delimitata da una linea Γ il solo punto a eventualmente escluso che sarà quindi un
punto di singolarità polare di un qualche ordine (anche essenziale). Allora vale la relazione:
1
{c−1 = residuo polare in a}
∫ f ( ξ )dξ = c−1
2π j Γ
Dimostrazione
Innanzitutto l'integrale lungo Γ o lungo una qualunque circonferenza di centro a dà luogo allo stesso risultato per motivi già più volte
esposti. Effettueremo quindi l'integrazione lungo una circonferenza di centro a e raggio ρ (fig. @@@).
Poichè:
f (ξ ) =
+∞
∑ cn ⋅ (ξ − a ) n
n = −∞
vale:
+∞
+∞
1
1
1
f ( ξ )dξ = ∑
c n ⋅ ( ξ − a ) n dξ = ∑
∫
∫
n = −∞ 2 π j
n = −∞ 2 π j Γ
2π j Γ
1
2π
∫c ρ e
n
jnθ
n
0
⋅ jρe jϑdθ =
cn ρ( n + 1)
n = −∞
2π
+∞
∑
2π
∫e
j ( n + 1) θ
dθ
0
E' facile vedere (e la semplice dimostrazione si lascia al lettore) che tutti gli integrali dell'ultima sommatoria sono nulli ad eccezione
di quello relativo a n = -1 il cui risultato è 2⋅π. Per cui vale la tesi:
1
f ( ξ )dξ = c−1
2 π j ∫Γ
TEOREMA 1.12
Condizione necessaria e sufficiente affinchè una funzione olomorfa sia il rapporto tra due polinomi in z è che abbia un numero finito
di singolarità polari (ciascuna contata col suo ordine, al finito o all'infinito) ed un numero finito di zeri (ciascuno contato col suo
ordine al finito o all'infinito)
Dimostrazione
Si dà solo un cenno della dimostrazione.
Se una f(z) è un rapporto tra polinomi in z è facile vedere che le sue singolarità polari al finito sono le radici del denominatore,
contate con la loro molteplicità (che altro non è che l'ordine della singolarità polare); esistono singolarità polari all'infinito se il grado
del numeratore è maggiore di quello del denominatore e l'infinito costituisce una singolarità polare di ordine pari alla differenza tra
grado del numeratore e grado del denominatore. I suoi zeri invece sono le radici del numeratore (ciascuna contata con la sua
molteplicità) ed analogamente a quanto detto per i poli esiste uno zero all'infinito di ordine finito se il denominatore ha grado
superiore al numeratore; l'ordine di tale zero poi è uguale alla differenza tra grado del denominatore e grado del numeratore. Non
esistono altri punti in cui la f(z) non sia olomorfa o si annulli, per cui risultano finiti sia il numero di zeri che dei poli.
Inversamente se una f(z) ha numero limitato di zeri e poli si sviluppi in serie di Laurent tale funzione nell'intorno del suo primo polo
(l'ordine di questi sia preventivamente assegnato ad arbitrio), ottenendo una parte fratta (la parte di sviluppo per n negativi, che per
ipotesi è certamente finita, avendo la f(z) un numero limitato di singolarità polari ciascuna contata secondo il suo ordine) ed una serie
monolatera (per n positivo o nullo) che costituisce quindi una funzione olomorfa nel punto in esame. Si prenda questa parte che
risulterà non olomorfa negli altri punti di non olomorfia dell f(z) e si ripeta lo sviluppo di Laurent attorno a tali punti, separando volta
per volta la parte fratta. L'operazione ha certamente un termine, rimanendo alla fine solo una parte intera finita che dà luogo alle
eventuali singolarità polari all'infinito. In conclusione la f(z) potrà essere espressa come somma di un polinomio (la parte finita) e di
parti fratte finite per cui altro non è che un rapporto tra polinomi.
2. La trasformata di Laplace monolatera.
DEFINIZIONE 2.1 (L-trasformata monolatera)
Si consideri una qualunque funzione f(t) reale della variabile reale t definita nel semiasse reale positivo. Sia tale funzione continua su
tutto ℜ+. Se esiste un insieme I del piano complesso tale che ∀s ∈ I converge il seguente integrale:
+∞
(D.2.1)
∫ f(t ) ⋅e
− st
dt = F( s )
0
diremo allora che l'integrale così ottenuto è una funzione in I complessa della variabile complessa s detta trasformata di Laplace
della funzione reale f(t).
OSSERVAZIONE 2.1
La definizione prevede la continuità della funzione f(t). La richiesta è abbastanza stringente; può tuttavia essere resa meno onerosa
richiedendo alla f(t) di essere generalmente continua, ovvero di avere un numero finito di punti di discontinuità in ogni intervallo
finito della variabile indipendente. In tal caso tuttavia alcune proprietà della L-trasformata (in particolare quella relativa alla Ltrasformata della derivata) hanno necessità per la loro dimostrazione della teoria delle distribuzioni. Dette proprietà verranno qui
dimostrate nell'ipotesi di continuità della funzione f(t), accettando la loro validità (senza dimostrazione) anche nel caso di quasi
continuità.
In relazione alla convergenza della (D.2.1) vale un risultato estremamente importante enunciato dal seguente teorema.
TEOREMA 2.1
Se l'integrale di definizione della L-trasformata di una funzione f(t) converge per un valore complesso s0 , allora detto integrale
converge per ogni valore complesso di s tale che R(s) > R(s0).
Dimostrazione
Infatti, detto:
τ
⎧
−s t
⎪ϕ( τ ) = ∫ f ( t ) ⋅ e dt
0
⎨
⎪σ = s − s0
⎩
0
l'integrale che esprime la L-trasformata in s può essere espresso nella seguente forma:
(D.2.2)
F( s ) =
+∞
∫ f (t ) ⋅e
0
+∞
− st
dt = ∫ e − ( s − s
0
)t
⋅ [ f ( t ) ⋅ e − s t ]dt
0
0
ed integrando per parti l'ultimo integrale si ottiene:
+∞
F( s ) = [ ϕ( t ) ⋅ e − σ t ]0 + σ ∫ e − σ t ϕ( t )dt
+∞
0
Per l'ipotesi dell'esistenza della Ltrasformata in s la funzione ϕ(t) risulta limitata, per cui:
lim ϕ( t ) ⋅ e − σ t ≤ tlim
ϕ( t ) ⋅ e − σ t ≤ tlim
M ⋅ e −R ( σt ) = 0
t → +∞
→ +∞
→ +∞
mentre l'integrale a secondo membro è certamente convergente in quanto l'integrando è il prodotto di una funzione limitata per
un'altra a integrale assolutamente convergente. Si conclude quindi che l'integrale espresso dalla (D.2.2) è certamente convergente.
OSSERVAZIONE 2.2
Il precedente teorema consente di determinare le caratteristiche dell'insieme del piano complesso ove l'integrale di definizione della
L-trasformata converge. Infatti si consideri tale insieme e costruiamo a partire da questo l'insieme di vaolri reali costituiti dalla parte
reale di ogni punto di convergenza. Di tale insieme esiste certamente un estremo inferiore eventualmente -∞. tale valore reale gioca
un importante ruolo, come si vede dalla prossima definizione e dal teorema successivo.
DEFINIZIONE 2.2 (ascissa di convergenza)
Si chiama ascissa di convergenza della L-trasformata di una funzione reale della variabile reale t l'estremo inferiore dell'insieme
dei valori reali dei punti complessi ove converge l'integrale di definizione della L-trasformata della funzione in esame. Tale ascissa
di convergenza verrà indicata col simbolo σ.
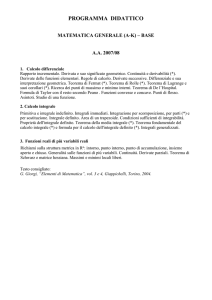
TEOREMA 2.2
ascissa di convergenza
L'integrale di definizione della L-trasformata di una funzione f(t)
converge certamente in tutto il semipiano a valori reali maggiori
dell'ascissa di convergenza; non converge in nessun punto a valore reale
minore dell'ascissa di convergenza; sulla retta de piano complesso a
valore reale uguale all'ascissa di convergenza nulla si può dire "a priori".
Dimostrazione
semipiano di convergenza
1.
2.
fig. D.2.1 Insieme di convergenza dell'integrale di definizione
della L-trasformata
L'integrale converge in s se R(s)>σ.
Infatti per la proprietà dell'estremo inferiore esiste certamente un
punto s* tale che σ ≤ R(s*) ≤ R(s) in cui l'integrale converge, e per il
teorema 2.1 converge quindi anche in s.
L'integrale non converge in s se R(s)<σ.
Infatti se convergesse σ non sarebbe estremo inferiore.
OSSERVAZIONE 2.3
Come già detto nulla si può dire sul comportamento dell'integrale di definizione della L-trasformata sulla retta a parte reale uguale
all'ascissa di convergenza. Vale tuttavia il seguente teorema che si enuncia senza dimostrazione.
TEOREMA 2.3
L'integrale di definizione della L-trasformata definisce una funzione F(s) olomorfa in tutto il semipiano aperto di convergenza.
Lungo la retta a parte reale uguale all'ascissa di convergenza esiste almeno un punto singolare di detta funzione.
OSSERVAZIONE 2.4
La funzione F(s) risulta quindi definita su un semipiano ove è anche olomorfa. E' possibile tuttavia estendere la sua definizione a
tutto il piano complesso (punti di singolarità esclusi) mediante la tecnica del prolungamento analitico di Weiestrass esaminata al
paragrafo precedente. In conclusione la F(s) risulterà definita su tutto il piano complesso ad esclusione dei suoi punti di singolarità
polare. Se tali punti sono in numero finito, ciascuno contato col suo ordine, punto all'infinito compreso, allora la F(s) risulterà uguale
ad un rapporto di polinomi in s. Sarà questo il caso di maggior interesse nello studio dei sistemi dinamici lineari stazionari a finite
dimensioni.
OSSERVAZIONE 2.5
Un criterio spesso utile per giudicare sulla esistenza della L-trasformata di una funzione f(t), è quello di trovare una funzione Ltrasformabile che maggiori in norma la funzione data; è facile in questo caso (e la semplice dimostrazione si lascia al lettore)
dimostrare che l'integrale di definizione della L-trasformata converge.
Ad esempio sono L-trasformabili tutte le funzioni f(t) tali che:
(D.2.3)
f ( t ) ≤ M ⋅ eα t
Infatti la funzione eαt è certamente L-trasformabile (basta effettuare l'integrale di definizione) ed ha ascissa di convergenza α.
Infine è facile dimostrare che se vale la (D.2.3), l'ascissa di convergenza della f(t) è certamente minore od uguale all'ascissa di
convergenza α.
OSSERVAZIONE 2.6
Iniziamo a stabilire le L-trasformate di alcune importanti funzioni:
1.
L-trasformata del gradino unitario H(t):
+∞
L ( H (t ) ) = ∫ e− s t dt = − 1s ⎡⎣e− s t ⎤⎦0+∞ = 1s
0
2.
⎡⎣R ( s ) > 0⎤⎦
L-trasformata della funzione eαt :
+∞
L ( eα t ) = ∫ eα t ⋅ e− s t dt = − ( s −1α ) ⎡⎣e(α − s ) t ⎤⎦0+∞ = ( s −1α )
0
⎡⎣R ( s ) > α ⎤⎦
OSSERVAZIONE 2.7
Valgono per la L-trasformata le seguenti proprietà:
1.
linearità
Se:
⎧
⎪
⎨
⎪
⎩
allora:
L ( f1 (t ) ) = F1 ( s)
L ( f2 (t ) ) = F2 ( s)
L(k
1 f1 ( t )
⎣⎡R ( s ) > α1 ⎦⎤
⎡⎣R ( s ) > α 2 ⎤⎦
+ k2 f 2 (t ) ) = k1 F1 ( s ) + k2 F2 ( s )
⎡⎣R ( s ) > max(α1 , α 2 ) ⎤⎦
La dimostrazione di tale proprietà è immediata derivando dalla linearità dell'operatore di integrazione.
2.
traslazione nel dominio del tempo
Se:
L ( f (t ) ) = F ( s )
⎡⎣R ( s ) > α ⎤⎦
allora:
0
L ( f (t − τ ) ) = e− sτ F ( s) + e− sτ ∫ f (t ) ⋅ e− s t dt
−τ
⎡⎣R ( s ) > α ⎤⎦
La dimostrazione deriva dalla definizione di L-trasformata. Vale infatti:
+∞
L ( f (t − τ ) ) = ∫
f (t − τ ) ⋅ e − s t dt = e − sτ ⋅
0
= e − sτ ⋅
+∞
∫
−τ
f (t ) ⋅ e − s t dt = e − sτ
+∞
∫
f (t − τ ) ⋅ e − s ( t −τ ) dt =
0
0
0
⎡ +∞
⎤
⋅ ⎢ ∫ f (t ) ⋅ e − s t dt + ∫ f (t ) ⋅ e − s t dt ⎥ = e − sτ F ( s ) + e − sτ ∫ f (t ) ⋅ e− s t dt
−τ
−τ
⎣⎢ 0
⎦⎥
Inoltre è immediato anche concludere che l'ascissa di convergenza non cambia.
Relativamente a tale proprietà si veda anche la prossima osservazione.
3.
traslazione nel dominio della frequenza complessa
Se:
F ( s) =
L ( f (t ) )
allora:
L(e
F (s − a) =
⎡⎣R ( s ) > α ⎤⎦
⋅ f (t )
at
)
⎡⎣R ( s ) > α + a ⎤⎦
Infatti:
L(e
+∞
at
+∞
) ∫
0
4.
⎡⎣R ( s − a ) > α ⎤⎦
f (t ) ⋅ ea t ⋅ e − s t dt = ∫ f (t ) ⋅ e − ( s − a ) t dt =F ( s − a )
⋅ f (t ) =
0
cambiamento della scala dei tempi o della scala della frequenza complessa
Se:
F ( s) =
L ( f (t ) )
⎡⎣R ( s ) > α ⎤⎦
allora, per ogni a positivo vale:
α⎤
⎡
⎢R ( s ) > a ⎥
⎣
⎦
L ( f (a ⋅ t ) ) = a1 F ⎛⎜ as ⎞⎟
⎝ ⎠
Infatti:
+∞
L( f (a ⋅ t ) ) = ∫
0
5.
+∞
f ( a ⋅ t ) ⋅ e − s t dt = ∫
0
t′
−s
1
1 ⎛s⎞
f (t ′) ⋅ e a dt ′ = F ⎜ ⎟
a
a ⎝a⎠
⎡ ⎛s⎞
⎤
⎢R ⎜ ⎟ > α ⎥
⎣ ⎝a⎠
⎦
proprietà della convoluzione
Se:
L ( f (t ) )
L ( f (t ) )
⎧ F ( s) =
⎪ 1
⎨
⎪ F ( s) =
⎩ 2
⎣⎡R ( s ) > α1 ⎦⎤
1
allora:
F1 ( s ) ⋅ F2 (s) =
⎡⎣R ( s ) > α 2 ⎤⎦
2
L ( f (t ) * f (t ) )
1
⎡⎣R ( s ) > max (α1 , α 2 )⎤⎦
2
Infatti l'integrale di convoluzione tra due funzioni del tempo, nell'ipotesi che dette funzioni siano identicamente nulle per valori
negativi del tempo, può essere così espresso:
t
+∞
0
0
f1( t ) * f2 ( t ) = ∫ f1( τ ) ⋅ f2 ( t − τ )dτ = ∫ f1( τ ) ⋅ f2 ( t − τ )dτ
per cui la sua L-trasformata è data da:
+∞ ⎡ +∞
L ( f1 (t ) * f2 (t ) ) = ∫ ⎢ ∫
0
+∞
=
∫
0
f1 (τ ) ⋅ e − sτ
+∞
∫
⎣⎢
0
+∞ +∞
⎤
f1 (τ ) ⋅ f 2 (t − τ )dτ ⎥ ⋅ e − st dt = ∫ ∫ f1 (τ ) ⋅ f 2 (t − τ ) ⋅ e − s ( t −τ ) ⋅ e − sτ dτ dt =
0 0
⎦⎥
f 2 (t − τ ) ⋅ e − s ( t −τ ) dt dτ =
0
+∞
∫
f1 (τ ) ⋅ e − sτ
0
⎡ +∞
⎤ ⎡ +∞
⎤
= ⎢ ∫ f1 (τ ) ⋅ e − sτ dτ ⎥ ⋅ ⎢ ∫ f 2 (t ′) ⋅ e − st ′dt ′⎥ = F1 ( s ) ⋅ F2 ( s )
⎦⎥
⎣⎢ 0
⎦⎥ ⎣⎢ 0
6.
Se:
L-trasformata della derivata di una funzione
+∞
∫
f 2 (t ′) ⋅ e − st ′ dt ′ dτ =
0
⎡⎣R ( s ) > max (α1 , α 2 )⎤⎦
F ( s) =
L ( f (t ) )
⎡⎣R ( s ) > α ⎤⎦
allora:
L ⎛⎜ ddtf ⎞⎟ = s ⋅ F ( s) − f (0)
⎝
⎡⎣R ( s ) > α ⎤⎦
⎠
Infatti vale la seguente catena di uguaglianze:
+∞
L ⎛⎜ ddtf ⎞⎟ = ∫ ddtf ⋅ e
⎝
⎠
− st
0
dt = ⎡⎣ f (t ) ⋅ e − st ⎤⎦
+∞
0
+∞
−
∫ − s ⋅ f (t ) ⋅ e
− st
dt =
0
⎡⎣R ( s ) > α ⎤⎦
= s ⋅ F ( s ) − f (0)
Si noti che nella catena di uguaglianze si è implicitamente ammesso che valga il seguente limite per tutti i valori s in cui converge
l'integrale di definizione della L-trasformata della funzione non derivata:
lim f ( t ) ⋅ e− st = 0
t →+∞
e ciò è ovviamente vero vista la convergenza dell'integrale di definizione della L-trasformata di f(t).
7.
L-trasformata della funzione integrale
Se:
F ( s) =
L ( f (t ) )
⎡⎣R ( s ) > α ⎤⎦
allora:
⎛t
⎞
⎝0
⎠
L ⎜⎜ ∫ f (τ )dτ ⎟⎟ = F (ss)
⎡⎣R ( s ) > α ⎤⎦
Basta ricordare infatti che.
t
d ∫ f ( τ )dτ
0
dt
= f(t )
ed applicare la proprietà 6.
8.
derivazione nel dominio della frequenza
Se:
F ( s) =
L ( f (t ) )
⎡⎣R ( s ) > α ⎤⎦
allora:
d F ( s)
=
ds
L ( −t ⋅ f ( t ) )
⎡⎣R ( s ) > α ⎤⎦
Infatti, ammessa l'esistenza della derivata di F(s) nel semipiano di convergenza (vedi una successiva osservazione), vale:
+∞
d F ( s)
=
ds
d
∫
f (t ) ⋅ e − st dt
0
ds
+∞
=
∫
f (t ) ⋅
0
d e − st
dt = −
ds
+∞
∫ t ⋅ f (t ) ⋅ e
− st
dt =
0
Infine valgono due proprietà molto importanti che vengono riportate ai punti 9 e 10.
9.
formula di inversione della L-trasformata
Se:
F ( s) =
L ( f (t ) )
⎡⎣R ( s ) > α ⎤⎦
allora vale la seguente formula di antitrasformazione:
1
f (t ) =
F ( s ) ⋅ e st ds
2π j ∫Γ
L ( −t ⋅ f (t ) )
⎡⎣R ( s ) > α ⎤⎦
Ove la linea Γ è una qualunque retta parallela all’asse immaginario contenuta nel semipiano di convergenza della F(s).
Di tale espressione non si fornisce dimostrazione.
10. convoluzione complessa.
Se:
L ( f (t ) )
L ( g (t ) )
⎧ F ( s) =
⎪
⎨
⎪G ( s ) =
⎩
⎣⎡R ( s ) > α1 ⎦⎤
⎡⎣R ( s ) > α 2 ⎤⎦
allora:
L ( f (t ) ⋅ g (t ) ) = 2π1 j ∫ F (ξ )G( s − ξ )d ξ
Γ
Ove Γ è una retta parallela all’asse immaginario definita da un’ascissa reale R(ξ) che deve essere compresa tra:
σ f < R(ξ ) < R( s − σ g )
Con ovvio significato della simbologia.
La dimostrazione procede dalla seguente catena di disuguaglianze:
+∞
⎛ +∞
⎞
⎛ 1
⎞ − st
1
ξt
⋅
⋅
=
⋅
(
)
(
)
F
ξ
e
d
ξ
e
dt
F
ξ
⎜ ∫ g (t ) ⋅ e − ( s −ξ ) t dt ⎟ d ξ =
⎟
( f (t ) ⋅ g (t ) ) = ∫ g (t ) ⋅ ⎜⎜
∫
∫
⎟
⎜
⎟
2π j Γ
0
⎝ 2π j Γ
⎠
⎝ 0
⎠
1
=
F (ξ ) ⋅ G ( s − ξ )d ξ
2π j ∫Γ
L
11. Teorema di Parceval.
Se:
F ( s) =
L ( f (t ) )
⎡⎣R ( s ) > α ⎤⎦
con ascissa di convergenza α negativa: allora:
+∞
∫
f (t ) 2 dt =
0
1
2π
+∞
∫ F ( jω ) ⋅ F (− jω )d ω
−∞
Infatti, ponendo g(t)=f(t) nella relazione 10 e supponendo che l’ascissa di convergenza della L-trasformata di f(t) sia negativa, la
relazione 11 diventa:
+∞
∫
f (t )2 e − st dt =
0
1
F (ξ ) F ( s − ξ )d ξ
2π j ∫Γ
E calcolando il tutto in s=0 ed effettuando l’integrale a secondo membro lungo l’asse immaginario (cosa possibile visto che l’ascissa
di convergenza della F(s) è negativa), si ottiene la tesi.
12. teorema del valore iniziale
Se f(t) e la sua derivata sono maggiorate in norma da una funzione esponenziale e se:
F ( s) =
allora:
L ( f (t ) )
⎡⎣R ( s ) > α ⎤⎦
lim f ( t ) = lim s ⋅ F ( s )
t →0
s→∞
Infatti se si riprende la proprietà relativa alla L-trasformata della derivata di una funzione, si può affermare che:
+∞
d f ( t ) − st
s ⋅ F( s ) = f ( 0 ) + ∫
⋅ e dt
dt
0
e calcolando il limte per s che tende all'infinito per valori crescenti della sua parte reale è abbastanza facile dimostrare che l'ultimo
integrale tende a 0 quando la derivata è maggiorata in norma da una funzione esponenziale, (la funzione integranda infatti può essere
resa piccola in norma quanto si vuole, anzi può essere resa minore di una qualunque funzione esponenziale e quindi è maggiorata da
una serie di funzioni il cui integrale tende a 0). Da cui la tesi.
13. teorema del valore finale
Se:
F ( s) =
L ( f (t ) )
⎡⎣R ( s ) > α ⎤⎦
e se inoltre esiste finito il limite di f(t) per t che tende a più infinito, allora:
lim f ( t ) = lim s ⋅ F ( s )
t →+∞
s→ 0
Infatti:
+∞
lim
s ⋅ F( s ) = f ( 0 ) + lim
s→0
s→0 ∫
0
+∞
d f − st
⋅ e dt = f ( 0 ) + [f ( t )]0 = f ( +∞ )
dt
OSSERVAZIONE 2.8
Alcune considerazioni relative alle proprietà appena enunciate devono essere fatte.
1.
Nell'enunciato della proprietà 8 (derivazione nel dominio della frequenza), si è implicitamente ammesso che la funzione
complessa F(s) ottenuta dall'integrale di definizione della L-trasformata sia una funzione derivabile, e quindi olomorfa. Tale
affermazione va ovviamente giustificata prima ancora dell'enunciazione della proprietà 8. A giustificazione della olomorfia non
daremo una dimostrazione completa, ma ci limiteremo a dare solo la linea di dimostrazione, avvertendo il lettore che ciascuna
affermazione è facilmente dimostrabile, invitandolo quindi ad effettuarla. Si opererà inoltre solo nell'insieme delle funzioni del
tempo che sono maggiorate in modulo da una funzione esponenziale, come previsto dalla (D.2.3).
enunciato 1
Sia s0 un punto interno al semipiano di convergenza della L-trasformata di una funzione reale; sia inoltre I un qualunque suo
intorno circolare completamente contenuto nel semipiano di convergenza (e certamente esistente). detta Fn(s) la successione di
funzioni definita da:
n
Fn ( s ) = ∫ f ( t ) ⋅ e − st dt
[n ∈ℵ]
0
tale successioni converge uniformemente a F(s) L-trasformata della f(t).
A valle di tale enunciato si può concludere che la F(s) è continua ovunque nel semipiano aperto di convergenza.
enunciato 2
Parte reale e parte immaginaria della F(s) soddisfano alle condizioni di monogeneità in tutto il semipiano aperto di convergenza.
A valle di tale enunciato si può concludere che la F(s) è olomorfa in tutto il semipiano aperto di convergenza ed è quindi ivi
infinitamente derivabile.
enunciato 3
Lungo la frontiera del semipiano di convergenza esiste almeno un punto di singolarità della F(s).
A conclusione di quanto detto si può concludere che la funzione F(s) è una funzione analitica monodroma in tutto il semipiano
aperto di convergenza, e nulla vieta di estendere la sua definizione a tutto il piano complesso (escluso i suoi punti di singolarità)
con la tecnica di estensione mediante elementi analitici di Weiestrass già analizzata.
2.
L'importantissima proprietà 6. da cui deriva anche la proprietà 9. presuppone la derivabilità e quindi la continuità della funzione
f(t), ipotesi imposta esplicitamente nella definizione di L-trasformata. L'ipotesi di continuità può tuttavia essere tralasciata se si
amplia l'insieme delle funzioni derivabili in ogni punto accettando la derivabilità di una funzione secondo la teoria delle
distribuzioni. A tal fine (e senza dimostrazione), ammetteremo funzioni generalmente continue (ossia continue ovunque escluso
un numero finito di punti in ogni intervallo finito ove esistono finiti i limiti sisnistro e destro della funzione). In tal caso,
introducendo la funzione impulsiva di Dirac, si può affermare che
la derivata in un punto di discontinuità è data dalla funzione
f(t)
impulsiva con peso pari alla differenza tra il limite destro e il
limite sinistro (vedi fig. D.2.1). Con queste considerazioni la
proprietà 6. risulta sempre valida. E' tuttavia necessario
specificare con accuratezza l'intervallo di integrazione della Ltrasformata, e più precisamente indicare se l'origine è inclusa o
meno in detto intervallo di integrazione. E' possibile a tal fine
definire la L-trasformata di un segnale in due modi:
f'(t)
a) includendo l'origine nell'intevallo di integrazione:
+∞
L ( f (t ) ) = εlim ∫
ε
→ 0−
b)
f (t ) ⋅ e − st dt
escludendo l'origine dall'intervallo di integrazione:
+∞
fig. D.2.1 andamento qualitativo di una
funzione e della sua derivata
evidenziando gli impulsi di Dirac
L ( f (t ) ) = εlim ∫
+
ε
→ 0+
f (t ) ⋅ e − st dt
Ovviamente le due definizioni danno luogo allo stesso risultato se
la funzione f(t) non contiene una funzione impulsiva nell'origine;
mentre danno luogo a diverso risultato se è presente nell'origine una funzione impulsiva:
L ( f (t ) ) - L ( f ( t ) ) = p
+
[ p = peso dellafunzione impulsiva ]
Nel caso quindi in cui la funzione f(t) sia discontinua nell'origine (e quindi la sua derivata contiene un impulso nell'origine), la
proprietà 6. si enuncia in due diversi modi:
a) nel caso della definizione a) della L-trasformata:
Se:
F ( s) =
allora:
L ( f (t ) )
-
⎡⎣R ( s ) > α ⎤⎦
L ⎜⎛ ddtf ⎟⎞ = s ⋅ F ( s) − f (0
-⎝ ⎠
−)
⎡⎣R ( s ) > α ⎤⎦
b) nel caso della definizione b) della L-trasformata:
Se:
L ( f (t ) )
+
⎡⎣R ( s ) > α ⎤⎦
F ( s) =
allora:
L ⎜⎛ ddtf ⎟⎞ = s ⋅ F ( s) − f (0
+⎝ ⎠
+)
⎡⎣R ( s ) > α ⎤⎦
Infine la proprietà 9. (teorema del valore iniziale) che deriva direttamente dalla proprietà 6. vale sempre purchè si considerino
L-trasformate di funzioni prive di funzioni impulsive nell'origine ed il risultato del calcolo fornisce sempre in tal caso f(0+).
Nella seguente tabella vengono riportate in maniera sintetica le proprietà della L-trasformata.
TABELLA DELLE PROPRIETA' DELLA L-TRASFORMATA
N°
PROPRIETA'
COMMENTO
1
L( k1 f1 (t ) + k2 f2 (t ) ) = k1F1 ( s) + k2 F2 ( s)
Linearità
2
L ( f (t − τ ) ) = e
− sτ
F ( s ) + e − sτ
L(e
0
∫
f (t ) ⋅ e − s t dt
−τ
)
3
F (s − a) =
4
L ( f (a ⋅ t ) ) = a1 F ⎛⎜ as ⎞⎟
at
⋅ f (t )
⎝ ⎠
L( f1 (t ) * f2 (t ) )
5
F1 ( s ) ⋅ F2 (s) =
6
L ⎛⎜ ddtf ⎞⎟ = s ⋅ F ( s) − f (0)
7
L ⎜⎜ ∫ f (τ )dτ ⎟⎟ = F (ss)
⎝
⎞
⎝0
d F ( s)
=
ds
8
9
10
⎠
⎛t
f (t ) =
⎠
L ( −t ⋅ f ( t ) )
1
F ( s ) ⋅ e st ds
2π j ∫Γ
L ( f (t ) ⋅ g (t ) ) = 2π1 j ∫ F (ξ )G( s − ξ )d ξ
Γ
11
+∞
∫
f (t ) 2 dt =
0
12
13
1
2π
Traslazione nel dominio del
tempo
Traslazione nel dominio della
frequenza
Cambiamento di scala
L-trasformata della convoluzione
L-trasformata della derivata
L-trasformata della funzione
integrale
Derivazione nel dominio della
frequenza
Formula di inversione
Convoluzione complessa
+∞
∫ F ( jω ) ⋅ F (− jω )d ω
Teorema di Parceval
−∞
lim f ( t ) = lim s ⋅ F ( s )
Teorema del valore iniziale
lim f ( t ) = lim s ⋅ F ( s )
Teorema del valore finale
t →0
t →+∞
s→∞
s→ 0
Nella seguente tabella vengono infine riportate le L-trasformate delle più semplici funzioni. Nella colonna dei commenti viene
suggerita la tecnica di calcolo della L-trasformata.
N°
1
2
f(t)
3
H(t) (gradino)
1
t n −1
(n − 1) !
F(s)
1
1/s
1
sn
4
eαt
(s − α )
δ(t) (impulso)
1
5
(n − 1) !
t n −1 ⋅ e α t
COMMENTI
Se l'intervallo di integrazione comprende l'origine
Integrazione diretta
Per induzione completa a partire dalla formula 2 sfruttando la
proprietà 7
1
Integrazione diretta oppure dalla formula 2 applicando la
proprietà 3
1
(s − α )n
ω
Dalla formula 3 applicando la proprietà 3
6
sin(ωt)
(s
7
cos(ωt)
s
(s2 + ω 2 )
8
sin(ωt+ϕ)
9
eαtsin(ωt+ϕ)
2
+ ω2
)
sin(ϕ ) ⋅ s + cos(ϕ ) ⋅ ω
(s
2
+ω 2
)
sin(ϕ ) ⋅ (s − α ) + cos(ϕ ) ⋅ ω
(s − α )2 + ω 2
Esprimendo sin(ωt) mediante le formule di Eulero ed
applicando quindi la formula 4 e la linearità della Ltrasformata.
Stessa tecnica di calcolo della formula 6
Dalle formule 6 e 7 ricordando le formule trigonometriche di
addizione e la linearità della L-trasformata
Dalla formula 8 applicando la proprietà 3
2. La trasformata Z monolatera.
DEFINIZIONE 3.1
Si consideri una qualunque successione f(k) reale definita nell’insieme dei naturali k ≥ 0 . Se esiste un insieme I del piano complesso
tale che ∀z ∈ I converge la seguente serie:
∞
(D.3.1)
∑ f (k ) ⋅ z − k
k =0
Diremo allore che la serie così ottenuta è una funzione in I complessa della variabile complessa z detta trasformata Z della
successione (o del segnale discreto) f(k).
In relazione alla convergenza della (D.3.1) vale un enunciato analogo a quello del teorema 2.1 relativo alla trasformata di Laplace.
TEOREMA 3.1
Se la serie definita in (D.3.1) relativa ad un segnale discreto f(k) converge per un valore complesso z0 , allora la serie converge per un
qualunque valore complesso z tale che |z|>|z0|.
Dimostrazione
Vale infatti:
f ( k ) ⋅ z − k ≤ f ( k ) ⋅ z0− k
∀ k ≥0
Per cui se la serie converge in z0 (assolutamente, e ciò è vero essendo una serie di potenze), a maggior ragione converge in z essendo
maggiorata in modulo per ogni addendo da una serie assolutamente convergente.
DEFINIZIONE 3.2 (raggio di convergenza)
Si chiama raggio di convergenza della Z-trasformata di una successione reale (ossia di un segnale discreto) l’estremo inferiore
dell’insieme dei moduli dei punti complessi ove converge la serie D.3.1. Tale raggio di convergenza verrà indicato col simbolo ρ.
TEOREMA 3.2
La serie di definizione della Z-trasormata di un segnale discreto f(k) converge certamente in tutti i punti del piano complesso a
modulo maggiore di ρ ; non converge in alcun punto a modulo minore di ρ ; sulla circonferenza di convergenza a modulo uguale a ρ
nulla si può dire “a priori”.
Dimostrazione
Regione di
convergenza
Raggio di
convergenza
Fig. D.3.1 Insieme di convergenza della serie di
definizione della Z-trasformata
1. La serie converge in z se |z| > ρ. Infatti per la proprietà dell’estremo
inferiore esiste certamente un punto z* tale che ρ ≤ |z*| ≤ |z| in cui la
serie converge, e per il teorema 3.1 converge quindi anche in z.
2. La serie non converge in z se |z| ≤ρ . Infatti se convergesse ρ non
sarebbe estremo inferiore.
OSSERVAZIONE 3.1
Ovviamente nulla si può dire sui punti della circonferenza di
convergenza. Vale tuttavia un teorema analogo a quello già enunciato
in relazione alla L-trasormata nel teore,ma 2.3 e che anche in questo
caso non si dimostra.
TEOREMA 3.3
La serie di definizione della Z-trasformatadefinisce una funzione F(z)
olomorfa in tutta la regione del piano di Gauss esterna al cerchio di convergenza. Lungo la circonferenza di convergenza esiste
almeno un punto singolare di detta funzione.
OSSERVAZIONE 3.2
La funzione F(z) definita dalla D.3.1 risulta quindi certamente olomorfa in tutta la regione esterna al raggio di convergenza. Con la
già nota tecnica di estensione di una funzione analitica mediante elementi di Weiestrass, è possibile estendere la definizione di detta
funzione anche all’interno del cerchio di convergenza, giungendo così ad una funzione analitica definita ovunque escluso i suoi punti
di singolarità polare.
OSSERVAZIONE 3.3
Un utile criterio per decidere sulla esistenza della Z-trasformata di un segnale discreto f(k), è quello di trovare un segnale Ztrasformabile che maggiori in modulo f(k) per ogni k; è ovvio che in tal caso la serie D.3.1 certamente converge.
Ad esempio sono Z-trasformabili tutti i segnali discreti tali che:
(D.3.2)
f ( k ) ≤ a k ∀ k ( a > 0)
Infatti il segnale ak è certamente Z-trasformabile (è sufficiente applicare direttamente la definizione come tra poco si vedrà) ed ha
raggio di convergenza pari ad a . Infine è facile dimostrare che il raggio di convergenza dell f(k) è certamente minore od uguale ad a
.
OSSERVAZIONE 3.4
Cominciamo a stabilire le Z-trasformate di alcune importanti funzioni
1.
Z-trasformata della funzione impulsiva discreta δ(k):
+∞
Z (δ (k )) = ∑ δ (k ) ⋅ z −k =1
[ ρ = 0]
k =0
2.
Z-trasformata della funzione a gradino unitario H(k):
+∞
1
z
(H ( k )) = ∑ z − k =
=
−1
z
−
1
−
1
z
k =0
Z
3.
[ ρ = 1]
Z-trasformata di una progressione geometrica ak:
+∞
Z (a k ) = ∑ a k ⋅ z − k = 1 − 1a / z = z −z a
ρ= a
k =0
OSSERVAZIONE 3.5
Valgono per la Z-trasformata le seguenti proprietà:
1.
linearità
Se:
⎧
⎪
⎨
⎪⎩
allora:
Z (f (k )) = F ( z ) [ρ = a ]
Z (f (k )) = F ( z ) [ρ = a ]
1
1
1
2
2
2
Z [c1 ⋅ f1 (k ) + c2 ⋅ f2 (k )] = c1 ⋅ F1 ( z) + c2 ⋅ F2 ( z)
[ ρ = max(a1 , a2 )]
La dimostrazione di tale proprietà è immediata considerando la linearità dell’operazione di serie, se assolutamente convergente.
2.
traslazione nel dominio del tempo
Se:
Z ( f (k )) = F ( z) [ ρ = a ]
allora:
⎧
⎪⎪
⎨
⎪
⎪⎩
(supponendo che f (k ) = 0
Z ( f (k − n)) = z n ⋅ F ( z )
[ρ = a]
n
Z ( f (k + n)) = z n ⋅ F ( z ) − ∑ ( z n i ⋅ f (i))
[ n ≥ 0]
−
−1
−
se k < 0 )
[ρ = a]
[ n ≥ 0]
i =0
La dimostrazione deriva direttamente dalla definizione di Z-trasformata monolatera; infatti la prima espressione deriva da:
+∞
+∞
+∞
+∞
k =0
k =0
k =− n
k =0
Z ( f (k − n)) = ∑ z −k f (k − n) = z − n ∑ z −(k −n ) f (k − n) = z − n ∑ z − k f (k ) = z − n ∑ z − k f (k ) = z − n F ( z )
In quest’ultima catena di uguaglianze, la penultima deriva dall’ipotesi che f(k)=0 per k negativi.
La seconda espressione deriva dalla seguente catena di uguaglianze:
+∞
+∞
+∞
+∞
n −1
n −1
k =0
k =0
k =n
k =0
i =0
i =0
Z ( f (k + n )) = ∑ z −k f (k + n) = z n ∑ z −(k + n) f (k + n ) = z n ∑ z − k f (k ) = z n ∑ z − k f (k ) − z n ∑ z −i f (i ) = z n F ( z ) − ∑ z n −i f (i )
Un caso particolare molto utilizzato deriva dalla seconda espressione quando n=1. Vale infatti:
Z ( f (k + 1)) = z ⋅ F ( z ) − z ⋅ f (0)
3.
omotetia nel piano “z”
Se:
Z ( f (k )) = F ( z) [ρ = a ]
allora:
Z (α
k
f ( k )) = F ( z / α )
⎡⎣ ρ = α ⋅ a ⎤⎦
Anche in questo caso la dimostrazione segue immediatamente dalla definizione di Z-trasformata:
+∞
+∞
k =0
k =0
Z (α k f (k )) = ∑ f (k ) ⋅ α k z − k = ∑ f (k ) ⋅ ( z / α )− k = F ( z / α )
4.
⎡⎣serie convergente per z / α > a ⎤⎦
prodotto di un segnale discreto per l’”ennesima potenza” del tempo “k”
Se:
Z ( f (k )) = F ( z) [ρ = a ]
allora:
n
Z (k n f (k )) = ⎛⎜ − z ⋅ dzd ⎞⎟ {F ( z )}
⎝
⎠
n
d ⎞
⎛
Ove col simbolo: ⎜ − z ⋅ ⎟ si intende la derivazione rispetto a “z” e la successiva moltiplicazione per “-z”, operazione applicata alla
dz ⎠
⎝
funzione di “z” che segue il simbolo indicato, e tale operazione va eseguita in successione “n” volte.
Si inizi dimostrando che l’espressione riportata vale per “n”=1. Infatti derivando membro a membro l’uguaglianza sottoriporatata che
costituisce la definizione di Z-trasformata:
+∞
F ( z ) = ∑ z −k f (k )
k =0
E ricordando inoltre che una serie di potenza può essere derivata “termine a termine”, si ottiene:
+∞
+∞
d
( F ( z )) = − ∑ k ⋅ z − ( k +1) f ( k ) = − z −1 ∑ z − k k ⋅ f ( k )
dz
k =0
k =0
Da cui è immediato:
1
Z (kf (k )) = ⎛⎜ − z ⋅ dzd ⎞⎟ {F ( z )}
⎝
⎠
Per cui l’enunciato della proprietà è vero per “n”=1
La dimostrazione ora procede per induzione completa; accettato per ipotesi induttiva e detto:
+∞
d ⎞
⎛
Φ n ( z ) = Z( k n f ( k )) = ∑ ( z − k k n f ( k )) = ⎜ − z ⋅ ⎟ F ( z )
dz ⎠
⎝
k =0
Derivando rispetto a “z” i termini di detta uguaglianza otteniamo:
+∞
+∞
d
Φ n ( z ) = − ∑ k ⋅ z − ( k +1) k n f ( k ) = − z ⋅ ∑ z − k k ( n +1) f ( k )
dz
k =0
k =0
Ossia:
n
−z
5.
Se:
+∞
d
Φ n ( z ) = ∑ z − k k ( n +1) f ( k ) =
dz
k =0
Z-trasformata della convoluzione di due segnali discreti.
Z (k n
( +1)
{
}
d ⎞
⎛
f ( k )) = ⎜ − z ⋅ ⎟
dz
⎝
⎠
n +1
{F ( z )}
⎧
⎪
⎨
⎪⎩
Z ( f (k )) = F ( z) [ ρ = a ]
Z ( g (k )) = G( z) [ ρ = b]
allora:
Z ( f (k ) * g (k )) = Z ⎛⎜⎜ ∑ f (i) ⋅ g (k − i) ⎞⎟⎟ = F ( z) ⋅ G( z)
k
⎝ i =0
⎠
La dimostrazione segue dalla seguente catena di uguaglianze (la cui validità è assicurata dalla assoluta convergenza delle serie in
gioco e dal fatto che i due segnali sono nulli per valori di “k”<0):
⎛ k
⎞ +∞ − k ⎛ +∞
⎞ +∞ ⎛ +∞ −i
⎞
− ( k −i )
( f ( k ) * g ( k )) =
g ( k − i ) ⎟⎟ =
⎜⎜ ∑ f (i ) ⋅ g ( k − i ) ⎟⎟ = ∑ z ⎜⎜ ∑ f (i ) ⋅ g ( k − i ) ⎟⎟ = ∑ ⎜⎜ ∑ z f (i ) ⋅ z
⎝ i =0
⎠ k =0
⎝ i =0
⎠ k =0 ⎝ i =0
⎠
Z
Z
+∞ ⎛ +∞
⎞ +∞
⎛ +∞
⎞ +∞
⎛ +∞
⎞
= ∑ ⎜⎜ ∑ z − i f (i ) ⋅ z − ( k −i ) g ( k − i ) ⎟⎟ = ∑ z − i f (i ) ⋅ ⎜⎜ ∑ z − ( k −i ) g ( k − i ) ⎟⎟ = ∑ z − i f (i ) ⋅ ⎜⎜ ∑ z − k ' g ( k ') ⎟⎟ =
i =0 ⎝ k =0
⎠ i =0
⎝ k =0
⎠ i =0
⎝ k ' =− i
⎠
+∞
⎛ +∞
⎞
= ∑ z − i f (i ) ⋅ ⎜⎜ ∑ z − k ' g ( k ') ⎟⎟ = F ( z ) ⋅ G ( z )
i =0
⎝ k '=0
⎠
6.
Z-trasformata del segnale differenza.
Se:
Z ( f (k )) = F ( z) [ρ = a ]
allora:
Z ( f (k ) − f (k − 1)) = z −z 1 ⋅ F ( z )
La dimostrazione è immediata (e si lascia al lettore) a partire dalla proprietà di linearità della Z-trasformata e dalla proprietà n° 2
(traslazione a destra del segnale).
7.
Z-trasformata del segnale somma.
Se:
Z ( f (k )) = F ( z) [ρ = a ]
k
allora, detto ϕ ( k ) = ∑ f (i ) , vale:
i =0
Z (ϕ (k )) = z −z 1 ⋅ F ( z )
La dimostrazione è immediata considerando che: f (k ) = ϕ (k ) − ϕ (k − 1) , e quindi, tenendo conto della proprietà n° 6, vale:
z −1
(ϕ ( k ))
F ( z) =
(ϕ (k ) − ϕ (k − 1) ) =
z
Da cui segue immediatamente la tesi.
Z
8.
Z
Formula di inversione dellaZ-trasformata.
Se:
Z ( f (k )) = F ( z) [ρ = a ]
allora vale la seguente formula di inversione:
f (k ) =
1
⋅ z k −1 F ( z )dz
2π j ∫Γ
Ove la linea Γ del piano complesso lungo la quale viene effettuato l’integrale deve essere una qualunque linea chiusa (in particolare
per pura comodità un cerchio con centro l’origine) completamente contenuta nella regione di convergenza della F(z).
Di tale asserto non se ne dà la dimostrazione.
9.
Se:
Convoluzione complessa.
⎧
⎪
⎨
⎪⎩
Z ( f (k )) = F ( z) [ ρ = a ]
Z ( g (k )) = G( z ) [ ρ = b]
allora:
Z ( f (k ) ⋅ g (k )) = 2π1 j ∫ (ξ
−1
)
f (ξ ) g (ξ −1 z ) d ξ
Γ
⎡ρ f < ξ < z / ρ g ⎤
⎣
⎦
Con Γ una qualunque linea chiusa (in particolare per comodità un cerchio di centro l’origine) contenuta nella regione anulare
indicata in parentesi quadra nella precedente relazione.
Infatti:
+∞
+∞ ⎛
+∞
⎞
−k ⎞
1
1 ⎛ −1
ξ k −1 F (ξ )d ξ ⎟ =
ξ F (ξ ) ∑ g ( k ) ⋅ zξ −1 ⎟⎟ d ξ =
( f ( k ) ⋅ g ( k )) = ∑ f ( k ) ⋅ g ( k ) ⋅ z − k = ∑ ⎜ z − k g ( k ) ⋅
⎜
∫
∫
⎜
⎜
⎟
π
j
π
j
2
2
k =0
k =0 ⎝
k =0
⎠
Γ
Γ⎝
⎠
1
=
ξ −1 F (ξ )G ( z / ξ )d ξ
2π j ∫Γ
Z
10.
(
)
Teorema di Parceval.
Se il raggio di convergenza della Z-trasformata di f(k) è minore di 1 allora vale:
+∞
1
2π
∑ f (k )2 = 2π ∫ F (e jΩ ) F (e− jΩ )d Ω
k =0
0
Dal precedente teorema, ponendo g(k)=f(k) ed effettuando l’integrale lungo il cerchio di raggio unitario (cosa possibile in quanto
detto cerchio è certamente compreso nella regione anulare definita da ρ f < ξ < 1/ ρ f ) otteniamo:
+∞
1
2π
∑ f (k )2 z − k = 2π ∫ F (e jΩ ) F ( ze− jΩ )d Ω
k =0
0
E calcolando tale espressione in z=1 otteniamo la tesi.
11.
Teorema del valore iniziale.
Se:
Z ( f (k )) = F ( z) [ρ = a ]
allora:
f (0) = lim F ( z )
z →∞
La dimostrazione (lasciata al lettore) è immediata a partire dalla definizione di Z-trasformata.
12.
Teorema del valore finale.
Se esiste finito f ∞ = lim f ( k ) , e se:
k →+∞
allora:
Z ( f (k )) = F ( z) [ρ = a ]
lim f ( k ) = lim ( ( z − 1) ⋅ F ( z ) )
k →+∞
z →1
Più che una dimostrazione ciò che segue è una giustificazione largamente intuitiva dell’asserto.
Si osservi innanzitutto che dall’ipotesi dell’esistenza del limite per k che tende all’infinito del segnale f(k) ne consegue che la sua Ztrasformata ha raggio di convergenza inferiore o al più uguale ad 1. In quest’ultimo caso può esistere un polo (singolo !) in 1 e non in
altri punti del cerchio unitario che non consentirebbero l’esistenza del limite per k che tende all’infinito di f(k). Quindi la funzione
complessa (z-1)F(z) è continua (addirittura olomorfa) in tutta la regione del piano di Gauss a modulo maggiore di 1. Ha quindi senso
il limite per z che tende ad 1 della funzione (z-1)F(z) almeno condotto per valori di z in modulo maggiore di 1; ed è in questa
condizione che va inteso il limite sopra citato.
Per cui il lim ( ( z − 1) ⋅ F ( z ) ) o è nullo o costituisce il residuo polare associato al polo in 1. In entrambi i casi certamente tale limite
z →1
coincide col limite di f(k) per k che tende all’infinito: nel primo perché tutti i modi propri di F(z) tendono a zero in quanto associati a
poli in modulo minore di 1, nel secondo caso perché l’unico modo proprio costante è proprio quello associato al polo in 1 con
residuo polare dato proprio dal limite calcolato.
TABELLA DELLE PROPRIETA' DELLA Z-TRASFORMATA MONOLATERA
N°
PROPRIETA'
COMMENTO
1
Z ( k1 f1 (k ) + k2 f2 (k ) ) = k1F1 ( z) + k2 F2 ( z)
Linearità
2
⎧
⎪⎪
⎨
⎪
⎪⎩
Z ( f (k − n)) = z
Z ( f (k + n)) = z
[ n ≥ 0]
⋅ F ( z)
n −1
n
⋅ F ( z) − ∑ ( z
n −i
Traslazione nel dominio del
tempo
[ n ≥ 0]
⋅ f (i ))
i =0
Z (α
3
Z (k
4
−n
n
k
Omotetia nel piano z
f ( k )) = F ( z / α )
d ⎞
⎛
f ( k )) = ⎜ − z ⋅ ⎟
dz ⎠
⎝
n
Prodotto di un segnale per una
potenza del tempo “k”
{F ( z )}
Z ( f (k ) * g (k )) = F ( z ) ⋅ G ( z )
Z ( f (k ) − f (k − 1)) = z −z 1 ⋅ F ( z )
5
6
Z-trasformata della convoluzione
Z-trasformata dell’incremento di
un segnale
Z (∑ f (i )) = z −z 1 ⋅ F ( z )
k
7
f (k ) =
8
9
Z-trasformata del segnale somma
i =0
Z ( f (k ) ⋅ g (k )) = 2π j ∫ (ξ
1
−1
1
2π j
Γ
)
f (ξ ) g (ξ −1 z ) d ξ
Γ
+∞
10
1
Formula di inversione della Ztrasformata
⋅ ∫ z k −1 F ( z )dz
⎡ρ f < ξ < z / ρ g ⎤
⎣
⎦
Convoluzione complessa
2π
∑ f (k )2 = 2π ∫ F (e jΩ ) F (e− jΩ )d Ω
k =0
Teorema di Parceval
f (0) = lim F ( z )
Teorema del valore iniziale
lim f ( k ) = lim ( ( z − 1) ⋅ F ( z ) )
Teorema del valore finale
0
11
z →∞
12
k →+∞
z →1
Nella seguente tabella vengono infine riportate le Z-trasformate delle più semplici funzioni. Nella colonna dei commenti viene
suggerita la tecnica di calcolo della Z-trasformata.
N°
1
2
H(k) (gradino)
3
knH(k)
4
akH(k)
f(k)
F(z)
1
z/(z-1)
δ(k) (impulso)
n
5
k n ⋅ a k H (k )
6
sin(kΩ)
7
cos(kΩ)
d ⎞ ⎛ z ⎞
⎛
⎜ − z ⋅ dz ⎟ ⎜ z − 1 ⎟
⎝
⎠ ⎝
⎠
z
(z − a)
COMMENTI
Dalla definizione di Z-trasformata
Dalla definizione o applicando la proprietà 7 a partire dalla
formula 1
Per induzione completa a partire dalla formula 2 sfruttando la
proprietà 4
Direttamente dalla definizione oppure dalla formula 2
applicando la proprietà 3
n
d ⎞ ⎛ z ⎞
⎛
⎜ − z dz ⎟ ⎜ z − a ⎟
⎝
⎠ ⎝
⎠
z ⋅ sin( Ω )
z 2 − 2 z ⋅ cos( Ω )+1
z 2 − z ⋅ cos( Ω )
z − 2 z ⋅ cos( Ω )+1
2
Dalla formula 4 applicando la proprietà 4
Esprimendo sin(kΩ) mediante le formule di Eulero ed
applicando quindi la formula 4 e la linearità della Ztrasformata.
Stessa tecnica di calcolo della formula 6
 1. Funzioni")