Fisica Medica
Mic hele V iscian o
Introduzione
La massa è una misura della resistenza di un corpo a variare il suo stato di moto. Nel SI, la sua unità di misura è il
chilogrammo (kg), definito come la massa di un cilindro di lega platino-iridio conservato all’Ufficio Internazionale di Pesi
e Misure di Sèvres, in Francia.
La lunghezza è una grandezza fondamentale, misurata nel SI in metri (m), unità di misura definita nel 1983 come la
distanza percorsa dalla luce nel vuoto durante il tempo di 1/299792458 secondi.
Il tempo è un’altra grandezza fondamentale, misurata nel SI in secondi (s), definito nel 1967 come 9192631770 volte il
periodo di oscillazione della radiazione dell’atomo di cesio (Cs).
Ogni unità di misura possiede multipli e sottomultipli ed è inoltre convertibile in altre unità di misura, purché l’analisi
dimensionale lo consenta. Es. 1 miglio = 1609 m = 1.609 km.
Metodo usato dal testo Jewett & Serway: 15.0 𝑖𝑖𝑖𝑖 = (15.0 𝑖𝑖𝑖𝑖) �
2.54 𝑐𝑐𝑐𝑐
1 𝑖𝑖𝑖𝑖
� = 38.1 𝑐𝑐𝑐𝑐
N.B. Il rapporto fra parentesi è uguale ad 1! Le unità di misura sono poste in modo da elidersi e dare l’unità di misura
desiderata.
Sistemi di coordinate
La collocazione spaziale degli eventi è rappresentata in fisica tramite coordinate geometriche: un punto su di una linea
retta è rappresentabile da una sola coordinata, un punto in un piano è individuato da due coordinate, un punto nello
spazio da tre coordinate.
Il sistema di coordinate usato consiste di un’origine (fissa), detta O, un insieme di assi o direzioni, ciascuno con scala di
misura e nome appropriati ed istruzioni che ci dicano come etichettare un punto dello spazio rispetto all’origine ed agli
assi. Il sistema di coordinate generalmente adoperato è quello cartesiano:
y
(
Vettori e Scalari
Le grandezze fisiche possono essere suddivise in due categorie: scalari e vettori. Gli scalari sono completamente
specificati da un numero (positivo o negativo) seguito da un’unità di misura. Un vettore, invece, necessita di informazioni
diverse per essere completamente specificato: intensità (o modulo), direzione e verso. Esempi di grandezze scalari sono
il tempo o la massa, esempi di vettori sono gli spostamenti, la forza, la velocità.
Dispensa di Fisica Medica
MV
1
Proprietà dei Vettori
�⃗ sono per definizione uguali se hanno le stesse unità di misura, lo stesso
Uguaglianza di due vettori: due vettori 𝐴𝐴⃗ e 𝐵𝐵
�⃗ solo se 𝐴𝐴 = 𝐵𝐵 ed 𝐴𝐴⃗ e 𝐵𝐵
�⃗ sono concordi. Questa proprietà
modulo e puntano nella stessa direzione e verso. Cioè, 𝐴𝐴⃗ = 𝐵𝐵
permette di traslare un vettore parallelamente a se stesso, senza alterarlo.
Addizione: due o più vettori possono essere sommati solo se hanno tutti la stessa unità di misura (come per gli scalari);
inoltre, si disegnano i vettori l’uno adiacente all’altro (cioè il secondo a partire dalla punta del primo, e così via) ed il
vettore somma risultante sarà un vettore che congiunge l’inizio della freccia del primo vettore con la punta della freccia
�⃗ = 𝐵𝐵
�⃗ + 𝐴𝐴⃗ ) e di quella associativa [ 𝐴𝐴⃗ +
dell’ultimo. La somma di vettori gode della proprietà commutativa (𝐴𝐴⃗ + 𝐵𝐵
�⃗ + 𝐶𝐶⃗� = �𝐴𝐴⃗ + 𝐵𝐵
�⃗� + 𝐶𝐶⃗].
�𝐵𝐵
Opposto di un vettore: l’opposto del vettore 𝐴𝐴⃗ è definito come il vettore che ha stesso modulo e direzione di 𝐴𝐴⃗ ma verso
opposto. La somma di un vettore con il suo opposto dà zero come vettore somma. Cioè, 𝐴𝐴⃗ + �−𝐴𝐴⃗� = 0.
�⃗ equivale alla somma del vettore 𝐴𝐴⃗ con l’opposto del vettore 𝐵𝐵
�⃗. Cioè, 𝐴𝐴⃗ − 𝐵𝐵
�⃗ =
Sottrazione di vettori: la sottrazione 𝐴𝐴⃗ − 𝐵𝐵
�⃗).
𝐴𝐴⃗ + (−𝐵𝐵
Moltiplicazione di un vettore per uno scalare:se un vettore 𝐴𝐴⃗ viene moltiplicato per una quantità scalare positiva s, il
prodotto 𝑠𝑠𝐴𝐴⃗ è un vettore che ha la stessa direzione e lo stesso verso di 𝐴𝐴⃗, ma modulo uguale al prodotto sA. Se s è,
invece, una grandezza negativa,il vettore 𝑠𝑠𝐴𝐴⃗ sarà diretto nel verso opposto ad 𝐴𝐴⃗.
�⃗ possono essere moltiplicati in due diversi modi: tramite il prodotto
Moltiplicazione di due vettori: due vettori 𝐴𝐴⃗ e 𝐵𝐵
scalare (che origina una grandezza scalare) e tramite il prodotto vettoriale (che origina una grandezza vettoriale). Nel
�⃗ = 𝐴𝐴𝐴𝐴 𝑐𝑐𝑐𝑐𝑐𝑐 𝜗𝜗, dove 𝜗𝜗 è l’angolo compreso fra i due vettori 𝐴𝐴⃗ e 𝐵𝐵
�⃗. Nel secondo caso,
primo caso, il prodotto scalare 𝐴𝐴⃗ ∙ 𝐵𝐵
�⃗ è uguale ad un vettore che ha modulo uguale ad 𝐴𝐴𝐴𝐴 𝑠𝑠𝑠𝑠𝑠𝑠 𝜗𝜗.
invece, il prodotto vettoriale 𝐴𝐴⃗ × 𝐵𝐵
Moto in una dimensione
Dall’esperienza quotidiana sappiamo che il moto rappresenta il cambiamento continuo della posizione di un oggetto. Il
moto di un oggetto attraverso lo spazio (traslazione) può essere accompagnato dalla rotazione e dalla vibrazione
dell’oggetto; è spesso possibile, tuttavia, semplificare le cose, trascurando rotazione e moti interni dell’oggetto in
movimento, almeno inizialmente. Il risultato è un modello semplificato che chiamiamo modello del punto materiale, in
cui qualsiasi oggetto è approssimato ad un punto materiale che si muove in uno spazio delimitato da assi cartesiani.
La velocità scalare media è una grandezza che trascura le variazioni di velocità che può avere un punto in movimento
ed approssima la velocità sempre costante durante lo spostamento. Essa si calcola come 𝑣𝑣𝑚𝑚𝑚𝑚𝑚𝑚 ≡
𝑑𝑑
∆𝑡𝑡
, dove d è la distanza
percorsa in un intervallo di tempo ∆𝑡𝑡 e ∆𝑡𝑡 è l’intervallo di tempo stesso. È, appunto, uno scalare e non necessita,
pertanto, di alcuna direzione o verso.
La velocità media è, invece, un vettore, definito come il rapporto fra lo spostamento ∆𝑥𝑥 e l’intervallo di tempo ∆𝑡𝑡 in cui
avviene questo spostamento (𝑣𝑣𝑥𝑥,𝑚𝑚𝑚𝑚𝑚𝑚 ≡
Dispensa di Fisica Medica
∆𝑥𝑥
∆𝑡𝑡
=
𝑥𝑥1 −𝑥𝑥0
𝑡𝑡1 −𝑡𝑡0
). N.B. Il pedice x indica lo spostamento lungo l’asse x.
MV
2
ATTENZIONE: il modulo della velocità media NON è uguale alla velocità scalare media! Es. una particella si muove
dall’origine fino a 𝑥𝑥 = 10𝑚𝑚 per poi tornare indietro in un intervallo di tempo complessivo ∆𝑡𝑡 = 4.0𝑠𝑠. Il modulo della
velocità media sarà 0 (perché il punto di inizio 𝑥𝑥0 coincide con il punto di fine 𝑥𝑥1 ), ma la velocità scalare media sarà
𝑣𝑣𝑚𝑚𝑚𝑚𝑚𝑚 =
20𝑚𝑚
4.0𝑠𝑠
= 5.0 𝑚𝑚⁄𝑠𝑠.
La velocità media, essendo il rapporto fra lo spostamento e l’intervallo di tempo, non ci fornisce alcuna informazione sul
moto, ma solo sul risultato del moto: essa è, infatti, indipendente dal cammino seguito dal punto materiale e dipende
soltanto dalle sue coordinate iniziali e finali.
Infine, è da notare che la velocità media può avere segno positivo o negativo, a seconda del segno dello spostamento
(l’intervallo di tempo è sempre positivo). Se 𝑥𝑥1 > 𝑥𝑥0 , la velocità media è positiva, cioè è nella direzione delle x positive.
Se, invece, 𝑥𝑥1 < 𝑥𝑥0, la velocità media è negativa, cioè è nella direzione delle x negative.
La velocità istantanea è, invece, la velocità (vettoriale) di una particella ad un qualsiasi istante di tempo ed è uguale al
valore limite del rapporto ∆𝑥𝑥⁄∆𝑡𝑡 quando ∆𝑡𝑡 tende a zero 1. Con la terminologia dell’analisi matematica, questo limite si
chiama derivata di x rispetto a t. Quindi 𝑣𝑣𝑥𝑥 ≡ 𝑙𝑙𝑙𝑙𝑙𝑙
∆𝑥𝑥
∆𝑡𝑡→0 ∆𝑡𝑡
Velocità Istantanea.
=
𝑑𝑑𝑑𝑑
𝑑𝑑𝑑𝑑
. Il termine generico Velocità è adoperato per riferirsi alla
Esiste anche una velocità scalare istantanea, che non è altro che il modulo del vettore Velocità Istantanea e non
necessita di ulteriori chiarimenti.
Quando la velocità varia nel tempo, si dice che la particella è accelerata. Se una particella in moto lungo l’asse x ha
velocità 𝑣𝑣𝑥𝑥𝑥𝑥 all’istante 𝑡𝑡𝑖𝑖 e velocità 𝑣𝑣𝑥𝑥𝑥𝑥 all’istante 𝑡𝑡𝑓𝑓 , l’accelerazione media 𝑎𝑎𝑥𝑥,𝑚𝑚𝑚𝑚𝑚𝑚 nell’intervallo di tempo ∆𝑡𝑡 = 𝑡𝑡𝑓𝑓 − 𝑡𝑡𝑖𝑖
è definita come il rapporto ∆𝑣𝑣𝑥𝑥 ⁄∆𝑡𝑡 in cui ∆𝑣𝑣𝑥𝑥 = 𝑣𝑣𝑥𝑥1 − 𝑣𝑣𝑥𝑥0 è la variazione di velocità nell’intervallo di tempo. Quindi,
𝑎𝑎𝑥𝑥,𝑚𝑚𝑚𝑚𝑚𝑚 ≡
𝑣𝑣𝑥𝑥1 −𝑣𝑣𝑥𝑥0
𝑡𝑡1 −𝑡𝑡0
=
∆𝑣𝑣𝑥𝑥
∆𝑡𝑡
. L’accelerazione è una misura della velocità scalare di variazione della velocità, ma è una
grandezza vettoriale.
Se il valore dell’accelerazione media è diverso in diversi intervalli di tempo, è utile definire l’accelerazione istantanea
come il limite dell’accelerazione media quando ∆𝑡𝑡 tende a zero, analogamente alla velocità istantanea. Quindi, 𝑎𝑎𝑥𝑥 ≡
𝑙𝑙𝑙𝑙𝑙𝑙
∆𝑣𝑣𝑥𝑥
∆𝑡𝑡→0 ∆𝑡𝑡
=
𝑑𝑑𝑑𝑑𝑥𝑥
𝑑𝑑𝑡𝑡
. Cioè, l’accelerazione istantanea è uguale alla derivata della velocità rispetto al tempo, che per definizione
è la pendenza del grafico velocità-tempo. Quando l’accelerazione e la velocità sono nello stesso verso, l’oggetto sta
aumentando il modulo della velocità in quel verso; se, invece, l’accelerazione e la velocità hanno verso discorde, la
velocità scalare dell’oggetto sta diminuendo nel tempo.
Se l’accelerazione di una particella varia nel tempo, descrivere il moto di tale particella può essere complicato. Se, invece,
l’accelerazione è costante, possiamo utilizzare un modello molto pratico, appunto quello della particella sottoposta ad
accelerazione costante. In questo caso, l’accelerazione media relativa a qualsiasi intervallo di tempo è uguale
all’accelerazione istantanea in ogni istante di tempo contenuto nell’intervallo. Se consideriamo, per convenienza, 𝑡𝑡0 = 0
e 𝑡𝑡1 = 𝑡𝑡, possiamo esprimere la velocità 𝑣𝑣𝑥𝑥 = 𝑣𝑣𝑥𝑥0 + 𝑎𝑎𝑥𝑥 𝑡𝑡. Questa espressione ci permette di prevedere la velocità ad ogni
istante t se la velocità iniziale e l’accelerazione (costante) sono note. Per conoscere, invece, la posizione della particella,
1
sapendo velocità (iniziale e finale) ed istante di tempo, utilizziamo l’equazione 𝑥𝑥 = 𝑥𝑥0 + 2 (𝑣𝑣𝑥𝑥0 + 𝑣𝑣𝑥𝑥 )𝑡𝑡. Possiamo inoltre
1
arrivare alla posizione anche conoscendo l’accelerazione (costante) invece della velocità finale: 𝑥𝑥 = 𝑥𝑥0 + 𝑣𝑣𝑥𝑥0 𝑡𝑡 + 2 𝑎𝑎𝑥𝑥 𝑡𝑡 2.
Infine, esiste anche una formula per la velocità in funzione della posizione: 𝑣𝑣𝑥𝑥 2 = 𝑣𝑣𝑥𝑥0 2 + 2𝑎𝑎𝑥𝑥 (𝑥𝑥 − 𝑥𝑥0 ).
Lo spostamento ∆𝑥𝑥 tende a zero quando ∆𝑡𝑡 tende a zero, ma il rapporto ∆𝑥𝑥⁄∆𝑡𝑡 tende al valore della vera pendenza
della retta tangente alla curva x in funzione di t.
1
Dispensa di Fisica Medica
MV
3
Queste equazioni sono utilizzabili anche per un corpo in caduta libera: l’accelerazione 𝑎𝑎⃗ diventerà però l’accelerazione
di gravità 𝑔𝑔⃗ = 9.80 𝑚𝑚⁄𝑠𝑠 2 = 980 𝑐𝑐𝑐𝑐⁄𝑠𝑠 2 = 32 𝑓𝑓𝑓𝑓 ⁄𝑠𝑠 2 . La direzione del vettore 𝑔𝑔⃗ è diretta in basso verso il centro della
Terra.
Moto in due dimensioni
Il moto di una particella lungo una retta è completamente determinato se è nota la sua posizione in funzione del tempo.
Nel piano xy, invece, la posizione della particella sarà espressa da un vettore posizione 𝑟𝑟⃗, tracciato a partire dall’origine
del sistema di riferimento alla posizione della particella. Quindi, ∆𝑟𝑟⃗ ≡ 𝑟𝑟���⃗1 − ���⃗.
𝑟𝑟0
La velocità media 𝑣𝑣⃗𝑚𝑚𝑚𝑚𝑚𝑚 della particella nell’intervallo di tempo ∆𝑡𝑡 è il rapporto fra lo spostamento e l’intervallo di tempo
stesso. Cioè, 𝑣𝑣⃗𝑚𝑚𝑚𝑚𝑚𝑚 ≡
∆𝑟𝑟⃗
∆𝑡𝑡
. Poiché lo spostamento è una grandezza vettoriale, anche la velocità media è un vettore, diretto
lungo ∆𝑟𝑟⃗. Come quella unidimensionale, anche questa velocità media è indipendente dal percorso e dipende soltanto
dalle coordinate iniziali e da quelle finali.
La velocità istantanea 𝑣𝑣⃗ è, invece, il limite della velocità media ∆𝑟𝑟⃗⁄∆𝑡𝑡 allorquando ∆𝑡𝑡 tende a 0. Ovvero, in simboli, 𝑣𝑣⃗ ≡
𝑙𝑙𝑙𝑙𝑙𝑙
∆𝑟𝑟⃗
∆𝑡𝑡→0 ∆𝑡𝑡
=
𝑑𝑑𝑟𝑟⃗
𝑑𝑑𝑑𝑑
. La direzione del vettore velocità istantanea in ogni punto della traiettoria è quella della retta tangente alla
traiettoria in quel punto e nel verso del moto. Il modulo della velocità istantanea è la velocità scalare.
Se la velocità cambia (anche solo in direzione), il vettore velocità istantanea cambia da 𝑣𝑣⃗0 al tempo 𝑡𝑡0 a 𝑣𝑣⃗1 al tempo 𝑡𝑡1 .
L’accelerazione media 𝑎𝑎⃗𝑚𝑚𝑚𝑚𝑚𝑚 è definita come il rapporto della variazione della velocità istantanea ∆𝑣𝑣⃗ in un intervallo di
tempo ∆𝑡𝑡 e l’intervallo di tempo stesso. In simboli, 𝑎𝑎⃗𝑚𝑚𝑚𝑚𝑚𝑚 ≡
𝑣𝑣
�⃗1 −𝑣𝑣
�⃗0
𝑡𝑡1 −𝑡𝑡0
(poiché la velocità istantanea è un vettore) diretta lungo ∆𝑣𝑣⃗.
=
∆𝑣𝑣
�⃗
∆𝑡𝑡
. L’accelerazione media è una grandezza vettoriale
L’accelerazione istantanea 𝑎𝑎⃗ è, infine, il valore limite del rapporto ∆𝑣𝑣⃗⁄∆𝑡𝑡, allorché ∆𝑡𝑡 tende a zero, cioè la derivata del
vettore velocità rispetto al tempo: 𝑎𝑎⃗ ≡ 𝑙𝑙𝑙𝑙𝑙𝑙
∆𝑣𝑣
�⃗
∆𝑡𝑡→0 ∆𝑡𝑡
=
𝑑𝑑𝑑𝑑
𝑑𝑑𝑑𝑑
.
Consideriamo ora il moto in due dimensioni in cui modulo e direzione dell’accelerazione rimangono costanti; esso può
essere descritto conoscendo il suo vettore posizione 𝑟𝑟⃗ in ogni istante. Nel piano xy, il vettore posizione si può scrivere
come 𝑟𝑟⃗ = 𝑥𝑥𝚤𝚤̂ + 𝑦𝑦𝚥𝚥̂, dove x, y ed 𝑟𝑟⃗ variano nel tempo al muoversi della particella. Anche il vettore velocità può essere
espresso in termini simili: 𝑣𝑣⃗ = 𝑣𝑣𝑥𝑥 𝚤𝚤̂ + 𝑣𝑣𝑦𝑦 𝚥𝚥̂. Assumendo il vettore accelerazione 𝑎𝑎⃗ costante, anche le sue componenti 𝑎𝑎𝑥𝑥 ed
𝑎𝑎𝑦𝑦 lo sono. Pertanto, possiamo applicare le equazioni della cinematica unidimensionale anche in questo caso,
1
modificandole opportunamente. Otteniamo, così, le seguenti equazioni: 𝑣𝑣⃗ = 𝑣𝑣⃗0 + 𝑎𝑎⃗𝑡𝑡 ed 𝑟𝑟⃗ = 𝑟𝑟⃗0 + 𝑣𝑣⃗0 𝑡𝑡 + 2 𝑎𝑎⃗𝑡𝑡 2 . In altre
parole, il moto di due dimensioni con accelerazione costante è equivalente a due moti indipendenti nelle direzioni x ed y
aventi accelerazioni 𝑎𝑎𝑥𝑥 ed 𝑎𝑎𝑦𝑦 costanti, giacché il moto nella direzione x non influenza quello nella direzione y e viceversa.
Il moto di un proiettile, sparato su un suolo piano dall’origine a 𝑡𝑡 = 0 con una componente 𝑣𝑣𝑦𝑦 positiva è un moto in due
dimensioni. Vi sono due punti nel moto interessanti da analizzare: il picco massimo, di coordinate cartesiane (R/2, h) ed
il punto di atterraggio, di coordinate (R,0). La distanza R è detta gittata del proiettile ed h è la sua altezza massima. A
causa della simmetria della traiettoria, il proiettile raggiunge la sua massima altezza h quando la sua posizione x è la
metà della gittata R. Si possono determinare R ed h in funzione di 𝑣𝑣0 , 𝜗𝜗0 e g. L’altezza massima sarà determinata
dall’equazione ℎ =
𝑣𝑣0 2 𝑠𝑠𝑠𝑠𝑠𝑠 𝜗𝜗0
2𝑔𝑔
, da cui si evince che per aumentare l’altezza massima si può agire in due modi: imprimere
una maggiore velocità iniziale 𝑣𝑣0 oppure spararlo ad un angolo 𝜗𝜗0 maggiore (oppure andare in un posto con una minore
accelerazione di gravità, come sulla Luna!). La gittata R, cioè la distanza orizzontale percorsa in un tempo doppio di
quello necessario a raggiungere il punto più alto, è, invece, calcolabile con l’equazione 𝑅𝑅 =
𝑣𝑣0 2 𝑠𝑠𝑠𝑠𝑠𝑠 2𝜗𝜗0 𝑐𝑐𝑐𝑐𝑐𝑐 𝜗𝜗0
𝑔𝑔
=
𝑣𝑣0 2 𝑠𝑠𝑠𝑠𝑠𝑠 2𝜗𝜗0
𝑔𝑔
,
da cui si evince che per aumentare la gittata si può agire in due modi: imprimere una velocità iniziale maggiore oppure
andare in un posto con una minore accelerazione di gravità (come sulla Luna!).
Dispensa di Fisica Medica
MV
4
Se il percorso è circolare e la velocità è (di modulo) costante, si parla di moto circolare uniforme; la particella che si
muove con questo moto ha comunque un’accelerazione, anche se la velocità non cambia di modulo, dal momento che
la velocità cambia in ogni istante, per rimanere tangente alla traiettoria. Questo tipo di accelerazione si chiama
accelerazione centripeta ed il suo modulo è dato da 𝑎𝑎𝑐𝑐 =
𝑣𝑣 2
𝑟𝑟
, dove r è il raggio della circonferenza. L’accelerazione
centripeta è diretta verso il centro della circonferenza. In molte situazioni, è conveniente descrivere il moto di una
particella che si muove con velocità costante di modulo lungo una circonferenza di raggio r in funzione del periodo T,
definito come il tempo necessario per una rivoluzione completa: nel tempo T, la particella si muove su un percorso di
2𝜋𝜋𝜋𝜋, uguale alla lunghezza della traiettoria circolare. Quindi, poiché il modulo della velocità è uguale alla lunghezza della
circonferenza diviso per il periodo, ossia 𝑣𝑣 = 2𝜋𝜋𝜋𝜋⁄𝑇𝑇, segue che il periodo sarà definito dall’equazione 𝑇𝑇 =
2𝜋𝜋𝜋𝜋
𝑣𝑣
.
Nel caso in cui, invece, la velocità di una particella, lungo un percorso curvo, vari di modulo e di direzione, la velocità
della particella sarà sempre tangente al percorso e l’accelerazione sarà individuata dalla somma vettoriale 𝑎𝑎⃗ = 𝑎𝑎⃗𝑟𝑟 + 𝑎𝑎⃗𝑡𝑡 ,
dove 𝑎𝑎⃗𝑟𝑟 è la cosiddetta accelerazione radiale (dovuta alla variazione della direzione del vettore velocità ed il cui modulo
è uguale a −𝑎𝑎𝑐𝑐 ), mentre 𝑎𝑎⃗𝑡𝑡 è l’accelerazione tangenziale (dovuta alla variazione del modulo del vettore velocità ed il cui
modulo è uguale a
𝑎𝑎
𝑎𝑎
𝑑𝑑|𝑣𝑣
�⃗|
𝑑𝑑𝑑𝑑
).
𝑎𝑎⃗
Le Leggi del Moto
Ciascuno di noi ha una comprensione elementare del concetto di forza, tratta dall’esperienza quotidiana; dal punto di
vista fisico, si distingue fra forze di contatto, che rappresentano il risultato di un contatto fisico fra due oggetti, e campi
di forze, che non necessitano di contatto e possono agire attraverso lo spazio vuoto. La distinzione fra i due non è così
netta come sembrerebbe, dal momento che le forze di contatto sembrano in realtà dovute a campi di forze a livello
atomico. Sperimentalmente, le forze si comportano come vettori, per cui è conveniente adoperare la regola della somma
fra vettori per ottenere la forza risultante su un corpo.
La prima legge di Newton, talvolta detta principio di inerzia, definisce un insieme speciale di sistemi di riferimento
chiamati riferimenti inerziali. La legge può essere espressa come: “Se un corpo non interagisce con altri corpi, è possibile
individuare un sistema di riferimento nel quale esso abbia accelerazione nulla.” Un tale sistema di riferimento è chiamato
sistema di riferimento inerziale. Un qualsiasi sistema di riferimento che si muova con velocità costante relativa ad un
sistema di riferimento inerziale è esso stesso un sistema di riferimento inerziale (es. una nave che si muove con velocità
costante rispetto alla Terra è inerziale per i suoi occupanti; la Terra stessa, che si muove con velocità costante rispetto
al Sole, è inerziale per i suoi abitanti). La Terra, che si muove, oltre che intorno al Sole, anche intorno al proprio asse, è
approssimabile ad un sistema inerziale perché le velocità dei suoi due moti sono del tutto trascurabili se confrontate con
l’accelerazione di gravità g. Consideriamo, quindi, inerziale qualsiasi sistema in moto solidale a quello della Terra.
Un enunciato più pratico della legge di Newton è il seguente: in assenza di forze esterne, quando visto da un sistema
inerziale, un oggetto in quiete rimarrà in quiete ed un oggetto in moto persevererà nel suo stato di moto rettilineo
uniforme. In termini ulteriormente semplificati, quando su un corpo non agisce alcuna forza, la sua accelerazione è zero.
La tendenza di un corpo a resistere alle variazioni della sua velocità è detta inerzia; una misura di questa tendenza è la
massa (detta per l’appunto massa inerziale), proprietà intrinseca ai corpi la cui unità di misura nel SI è il kilogrammo (è
una grandezza scalare). Maggiore è la massa di un oggetto, minore sarà l’accelerazione che assumerà se è sottoposto
ad una determinata forza. Poiché sperimentalmente la forza (risultante) agente su di un oggetto è proporzionale
Dispensa di Fisica Medica
MV
5
all’accelerazione prodotta ( 𝐹𝐹 ∝ 𝑎𝑎 ), chiamiamo il fattore di proporzionalità massa. Attenzione: questa massa è
concettualmente differente dalla massa inerziale, tuttavia esse si identificano a livello numerico, per cui possiamo
ritenerle una stessa grandezza.
La massa non deve essere confusa con il peso, che è il modulo della forza gravitazionale 𝐹𝐹⃗𝑔𝑔 (la forza esercitata sull’oggetto
dal pianeta su cui risiede), proporzionale sì alla massa del corpo, ma anche all’accelerazione di gravità (𝐹𝐹⃗𝑔𝑔 = 𝑝𝑝⃗ = 𝑚𝑚𝑔𝑔⃗).
Pertanto, il peso è una grandezza vettoriale, mentre la massa è uno scalare.
La seconda legge di Newton afferma che l’accelerazione di un oggetto è direttamente proporzionale alla forza risultante
agente su di esso ed inversamente proporzionale alla sua massa: 𝑎𝑎⃗ ∝
∑ 𝐹𝐹⃗
𝑚𝑚
, dove ∑ 𝐹𝐹⃗ è la forza risultante, ovvero la somma
vettoriale di tutte le forze agenti sull’oggetto di massa m. In forma matematica, ∑ 𝐹𝐹⃗ = 𝑚𝑚𝑎𝑎⃗, espressione equivalente alle
tre equazioni componenti ∑ 𝐹𝐹𝑥𝑥 = 𝑚𝑚𝑎𝑎𝑥𝑥 , ∑ 𝐹𝐹𝑦𝑦 = 𝑚𝑚𝑎𝑎𝑦𝑦 ed ∑ 𝐹𝐹𝑧𝑧 = 𝑚𝑚𝑎𝑎𝑧𝑧 .
L’unità di misura della forza nel SI è il Newton (N), definito come la forza che agendo su una massa di 1 kg produce
un’accelerazione di 1 𝑚𝑚⁄𝑠𝑠 2 .
La terza legge di Newton (detta anche Principio di Azione e Reazione), infine, afferma che se due corpi interagiscono, la
forza 𝐹𝐹⃗12 esercitata dal corpo 1 sul corpo 2 è uguale in modulo, ma di verso opposto, alla forza 𝐹𝐹⃗21 esercitata dal corpo
2 sul corpo 1. Ovvero, le forze si presentano sempre in coppia. Es. la Terra esercita su un oggetto, come un monitor di
computer fermo su di un tavolo, una forza 𝐹𝐹⃗𝑇𝑇𝑇𝑇 diretta verso il basso, mentre il monitor esercita una forza di reazione
sulla Terra𝐹𝐹⃗𝑚𝑚𝑚𝑚 = −𝐹𝐹⃗𝑇𝑇𝑇𝑇 . Il monitor non accelera perché esso è sostenuto dal tavolo, che esercita sul monitor una forza
verso l’alto 𝑛𝑛�⃗ = 𝐹𝐹⃗𝑡𝑡𝑡𝑡 , chiamata forza normale. Dalla seconda legge di Newton si evince che, poiché il monitor ha
accelerazione nulla, ma massa non nulla, la risultante delle forze deve essere nulla: ∑ 𝐹𝐹⃗ = 𝑛𝑛�⃗ − 𝑚𝑚𝑔𝑔⃗ = 0, da cui 𝑛𝑛 = 𝑚𝑚𝑚𝑚.
La forza normale bilancia la forza gravitazionale sul monitor, quindi la forza risultante è zero.
Le Forze
Quando un corpo è in movimento su una superficie scabra o attraverso un mezzo viscoso (come l’acqua, ma anche l’aria),
c’è una resistenza al moto, dovuta all’interazione del corpo con ciò che lo circonda. Chiamiamo tale resistenza forza di
attrito. Se applichiamo ad un oggetto una forza piccola, esso rimane fermo finché non si raggiunge una certa soglia:
questa soglia è rappresentata dalla forza che bilancia la forza d’attrito statico 𝑓𝑓⃗𝑠𝑠 , che impedisce all’oggetto di muoversi.
Quando l’oggetto comincia a muoversi, la forza esercitata 𝐹𝐹⃗ ha superato la forza d’attrito statico massima 𝑓𝑓⃗𝑠𝑠,𝑚𝑚𝑚𝑚𝑚𝑚 .
Quando l’oggetto è in movimento, la forza di attrito diventa minore di 𝑓𝑓⃗𝑠𝑠,𝑚𝑚𝑚𝑚𝑚𝑚 e prende il nome di forza d’attrito dinamico
𝑓𝑓⃗𝑑𝑑 . L’accelerazione è prodotta ora non dalla forza 𝐹𝐹⃗ , bensì dalla forza netta 𝐹𝐹⃗ − 𝑓𝑓⃗𝑑𝑑 . Se riduciamo l’intensità di 𝐹𝐹⃗ fino ad
eguagliarla in modulo ad 𝑓𝑓⃗𝑑𝑑 , l’accelerazione diventa zero e l’oggetto si muoverà con velocità costante. Se la forza
applicata viene rimossa, la forza di attrito fornirà un’accelerazione nel verso opposto (cioè una decelerazione), fermando
il corpo.
Il modulo della forza di attrito statico fra due qualsiasi superfici a contatto può assumere valori dati da 𝑓𝑓𝑠𝑠 ≤ 𝜇𝜇𝑠𝑠 𝑛𝑛, dove
𝜇𝜇𝑠𝑠 è una costante adimensionale che rappresenta il coefficiente di attrito statico ed n è il modulo della forza normale. La
disuguaglianza ha valore fino al momento in cui il corpo è sul punto di iniziare a scivolare (in cui 𝑓𝑓𝑠𝑠 = 𝑓𝑓𝑠𝑠,𝑚𝑚𝑚𝑚𝑚𝑚 ≡ 𝜇𝜇𝑠𝑠 𝑛𝑛),
situazione detta di moto imminente.
Il modulo della forza di attrito dinamico agente fra due superfici è, invece, uguale ad 𝑓𝑓𝑑𝑑 = 𝜇𝜇𝑑𝑑 𝑛𝑛, dove 𝜇𝜇𝑑𝑑 è il coefficiente
di attrito dinamico, indipendente (almeno per i nostri scopi) dalla velocità relativa delle superfici. In generale, comunque,
𝜇𝜇𝑑𝑑 è minore di 𝜇𝜇𝑠𝑠 .
Dispensa di Fisica Medica
MV
6
La direzione della forza d’attrito è opposta al moto reale (attrito cinetico) o al moto imminente (moto statico)
dell’oggetto, relativamente alla superficie con la quale è a contatto.
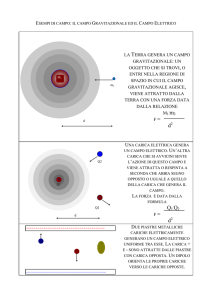
La forza gravitazionale è la forza di attrazione reciproca fra due corpi qualsiasi nell’Universo. Sebbene essa sia
estremamente intensa fra corpi macroscopici, è la più debole di tutte le forze fondamentali. La legge di gravitazione
universale di Newton afferma che ogni particella nell’Universo attrae ogni altra particella con una forza direttamente
proporzionale al prodotto delle due masse ed inversamente proporzionale al quadrato della distanza. In simboli, 𝐹𝐹𝑔𝑔 =
𝐺𝐺
𝑚𝑚1 𝑚𝑚2
𝑟𝑟 2
, dove G è la costante di gravitazione universale, corrispondente a 6.67 × 10−11 𝑁𝑁 ∙ 𝑚𝑚2 ⁄𝑘𝑘𝑘𝑘2 .
La forza elettromagnetica è la forza che lega atomi e molecole in composti che formano la materia ordinaria ed è molto
più intensa della forza gravitazionale. In realtà, tutte le forze che agiscono a livello macroscopico (eccetto quella
gravitazionale) sono manifestazioni della forza elettromagnetica (forze di contatto, forze di tensione, forze di attrito,
ecc.). La forza elettromagnetica prevede l’interazione fra due tipi di particelle, quelle con carica positiva e quelle con
carica negative: cariche di segno opposto si attraggono, cariche dello stesso segno di respingono (diversamente dalla
forza gravitazionale, che è sempre di tipo attrattivo). Il modulo della forza elettrostatica (cioè della forza
elettromagnetica fra due particelle cariche a riposo) è direttamente proporzionale alle cariche ed inversamente
proporzionale al quadrato della distanza fra le cariche. In simboli, la cosiddetta legge di Coulomb si scrive come 𝐹𝐹𝑒𝑒 =
𝑘𝑘𝑒𝑒
𝑞𝑞1 𝑞𝑞2
𝑟𝑟 2
, dove 𝑘𝑘𝑒𝑒 è detta costante di Coulomb ed è uguale a 8.99 × 109 𝑁𝑁 ∙ 𝑚𝑚2 ⁄𝐶𝐶 2 .
Esistono, inoltre, altre due forze fondamentali: una è la cosiddetta forza forte, forza di attrazione fra quark (particelle
che compongono elettroni e protoni), che supera la forza elettrostatica, per esempio nel tenere insieme protoni e
neutroni all’interno dei nuclei degli atomi; l’altra è detta forza debole, una forza a corto raggio che tende a produrre
instabilità in certi nuclei. Nel tentativo di unificare i tipi di forze, nel 1967 è stato proposto (e poi confermato
sperimentalmente nel 1984) che la forza elettromagnetica e la forza debole siano un’unicum, denominato oggi forza
elettrodebole. L’obiettivo è unificare tutte e quattro le forze in una singola superforza, con leggi uniche valide per tutti i
fenomeni fisici.
Energia e Trasferimento di Energia
L’energia è presente nell’Universo in molteplici forme. Ogni processo fisico nell’Universo coinvolge l’energia e
trasferimenti o trasformazioni di energia. Essa, pur essendo concettualmente così importante, è ben difficile da definire,
poiché non rappresenta una variabile “concreta” quale può essere la massa o la forza. Utilizziamo, quindi, due concetti
strettamente legati fra loro, quello di lavoro e quello di energia.
Innanzitutto, è bene definire il concetto di sistema come modello di semplificazione in cui concentriamo la nostra
attenzione su una piccola regione dell’Universo, ignorando i dettagli al di fuori di esso. Il contorno del sistema è
un’immaginaria superficie (spesso ma non necessariamente coincidente con una superficie fisica), che divide l’Universo
fra il sistema e l’ambiente circostante al sistema.
Se un sistema compie uno spostamento sotto l’azione di una forza costante, quella forza ha compiuto un lavoro sul
sistema. Questo lavoro si calcola come 𝐿𝐿 ≡ 𝐹𝐹∆𝑟𝑟 𝑐𝑐𝑐𝑐𝑐𝑐 𝜗𝜗, che non è altro che il prodotto scalare del modulo della forza per
il modulo dello spostamento. Si noti che per trovare il lavoro svolto non abbiamo bisogno di conoscere la durata dello
spostamento o la sua velocità o accelerazione. Il lavoro è, quindi, una grandezza scalare, misurata nel SI in 𝑁𝑁 ∙ 𝑚𝑚 o J
(Joule). Dalla formula si nota che il lavoro è zero se sono nulli: la forza, lo spostamento oppure il coseno dell’angolo
compreso, il che accade quando l’angolo è di 90°, cioè quando la forza è perpendicolare allo spostamento. Se, invece, la
forza è parallela alla direzione (e ha lo stesso verso) dello spostamento (e quindi 𝜗𝜗 = 0 e 𝑐𝑐𝑐𝑐𝑐𝑐 𝜗𝜗 = 1), il lavoro diventa
uguale a 𝐹𝐹∆𝑟𝑟.
Nel caso di una forza variabile, quindi non costante, basta applicare la formula di cui sopra per spostamenti infinitesimali
(tendenti a zero) in cui la forza può ritenersi costante e sommare tutti questi piccoli lavori (di numero tendente ad
Dispensa di Fisica Medica
MV
7
infinito): il valore totale tenderà ad un valore finito, ovvero l’area sottesa dalla curva forza-spostamento. In formula,
𝑥𝑥
𝐿𝐿 = ∫𝑥𝑥 𝐹𝐹𝑥𝑥 𝑑𝑑𝑑𝑑, cioè il lavoro svolto da 𝐹𝐹𝑥𝑥 durante lo spostamento da 𝑥𝑥0 ad 𝑥𝑥 è uguale all’integrale definito (da 𝑥𝑥0 ad 𝑥𝑥) di
0
𝐹𝐹𝑥𝑥 in 𝑑𝑑𝑑𝑑. Se sul sistema agiscono più forze, il lavoro totale svolto sul sistema sarà il lavoro compiuto dalla forza risultante.
Un sistema fisico costituito da un blocco, su una superficie orizzontale liscia, collegato ad una molla. Se la molla è
allungata o compressa di un tratto ∆𝑥𝑥 (a partire dalla sua posizione di equilibrio 𝑥𝑥0 = 0), essa eserciterà sul blocco una
forza data da 𝑓𝑓𝑚𝑚 = −𝑘𝑘𝑘𝑘, dove 𝑘𝑘 è una costante propria di ogni specifica molla, detta costante elastica della molla.
Questa legge è nota come legge di Hooke e risulta accurata purché lo spostamento non sia molto grande. E dunque il
𝑥𝑥
1
1
lavoro compiuto dalla molla sarà uguale a 𝐿𝐿𝑚𝑚 = ∫𝑥𝑥 (−𝑘𝑘𝑘𝑘)𝑑𝑑𝑑𝑑 = 2 𝑘𝑘𝑥𝑥02 − 2 𝑘𝑘𝑥𝑥 2 , da cui si nota che il lavoro sarà nullo per
0
qualsiasi moto i cui punti estremi coincidono (𝑥𝑥0 = 𝑥𝑥).
Un oggetto su cui è applicata una forza (che quindi compie un lavoro), che provoca uno spostamento, e quindi modifica
la sua velocità in modulo, avrà una certa energia cinetica. Il teorema delle forze vive (o teorema dell’energia cinetica)
dice, appunto, che: “quando è svolto lavoro su un sistema e la sola variazione nel sistema è il modulo della sua velocità,
il lavoro compiuto dalla forza risultante è uguale alla variazione dell’energia cinetica del sistema”. In formula, 𝐿𝐿 = 𝐸𝐸𝑘𝑘 =
1
2
𝑚𝑚𝑣𝑣 2 .
Va fatta una precisazione sui tipi di sistema: se un sistema è sottoposto a varie forze esterne, che ne causano una
variazione dell’energia cinetica, esso è un sistema non isolato. In tale sistema, il lavoro è inquadrato come un mezzo di
trasferimento di energia fra il sistema e l’ambiente. Tuttavia, esso non è l’unico: altri mezzi di trasferimento di energia
sono le onde meccaniche (propagazione in aria o in un altro mezzo), il calore (per mezzo di urti microscopici), la
trasmissione elettrica (per mezzo della corrente elettrica), la radiazione elettromagnetica, il trasferimento di materia.
Una nozione basilare è il principio di conservazione dell’energia: l’energia non si crea né si distrugge. Quando, infatti,
un sistema “perde” energia, vuol dire che essa ha attraversato il contorno ed è stata trasferita all’ambiente; ugualmente,
quando un sistema “acquista” energia, vuol dire che l’ambiente ne ha ceduto una quantità equivalente.
Oltre alla quantità di energia trasferita al sistema, è interessante conoscere anche la rapidità con cui essa viene
trasmessa. Si usa quindi il concetto di potenza. La potenza media è uguale al rapporto fra il lavoro svolto da una forza
𝐿𝐿
esterna in un intervallo di tempo e l’intervallo di tempo stesso. In simboli, 𝑊𝑊𝑚𝑚𝑚𝑚𝑚𝑚 ≡ ∆𝑡𝑡. La potenza istantanea, a un
particolare istante di tempo t, è il valore limite della potenza media quando ∆𝑡𝑡 tende a zero: 𝑊𝑊 ≡ 𝑙𝑙𝑙𝑙𝑙𝑙
𝐿𝐿
∆𝑡𝑡→0 ∆𝑡𝑡
=
𝑑𝑑𝑑𝑑
𝑑𝑑𝑑𝑑
generale, però, la potenza è definita non solo per il lavoro, ma per ogni tipo di trasferimento di energia, come 𝑊𝑊 =
. In
𝑑𝑑𝑑𝑑
𝑑𝑑𝑑𝑑
,
ovvero la rapidità con cui l’energia attraversa il contorno del sistema. L’unità di misura della potenza nel SI è il 𝑊𝑊 (Watt)
o 𝐽𝐽⁄𝑠𝑠. Un’altra unità, in uso nel sistema convenzionale USA, è il cavallo vapore (hp), corrispondente a 746 W. In funzione
del Watt si definisce una nuova unità di energia, il chilowatt-ora (kWh), corrispondente all’energia trasferita in un’ora al
tasso costante di 1 kW. ATTENZIONE: il kWh è un’unità di energia, NON di potenza!
Energia Potenziale
Immaginiamo un sistema costituito da un libro e dalla Terra, che interagiscono tramite la forza gravitazionale.
Sollevando (lentamente) il libro di una quota ∆𝑦𝑦 = 𝑦𝑦𝑏𝑏 − 𝑦𝑦𝑎𝑎 , faremo certamente un certo lavoro sul sistema. Tuttavia,
poiché il libro era fermo all’inizio e resta fermo anche dopo lo spostamento, la sua energia cinetica non cambia. Ma ci
deve essere un’altra forma di energia immagazzinata, dal momento che rilasciando il libro, esso cade al suolo,
acquisendo una certa velocità. Mentre il libro era sollevato, esso possedeva la potenziale capacità di acquisire energia
cinetica, donatagli dal sollevamento iniziale. Questo meccanismo di immagazzinamento è, quindi, chiamato energia
potenziale (nello specifico, energia potenziale gravitazionale). Matematicamente, l’energia potenziale gravitazionale si
esprime con la relazione 𝑈𝑈𝑔𝑔 ≡ 𝑚𝑚𝑚𝑚ℎ, dove m è la massa dell’oggetto, g è l’accelerazione di gravità ed h è lo spostamento
in senso verticale. Ebbene, il lavoro compiuto dalla forza che ha sollevato l’oggetto è uguale alla variazione dell’energia
Dispensa di Fisica Medica
MV
8
potenziale: 𝐿𝐿 = ∆𝑈𝑈𝑔𝑔 = 𝑈𝑈𝑔𝑔 − 𝑈𝑈𝑔𝑔0 , dove, poiché il libro era inizialmente a terra, 𝑈𝑈𝑔𝑔0 era uguale a zero, per cui 𝐿𝐿 = 𝑈𝑈𝑔𝑔 .
L’energia potenziale gravitazionale dipende solamente dall’altezza che raggiunge l’oggetto e non cambia se esso viene
sollevato verticalmente o trascinato su di un piano inclinato.
Possiamo definire anche l’energia potenziale elastica come l’energia immagazzinata nella molla deformata (che sia
1
compressa o allungata): 𝑈𝑈𝑚𝑚 ≡ 2 𝑘𝑘𝑥𝑥 2. Poiché 𝑥𝑥 2 è sempre una quantità positiva, l’energia potenziale elastica, per una
molla deformata, è sempre una quantità positiva.
La somma dell’energia potenziale e dell’energia cinetica di un sistema si chiama energia meccanica totale del sistema.
La legge della conservazione dell’energia meccanica afferma, appunto, che l’energia meccanica di un sistema isolato
non cambia: se aumenta l’energia cinetica, diminuirà quella potenziale e viceversa. In simboli, 𝐸𝐸𝑚𝑚 = 𝐸𝐸𝑘𝑘 + 𝑈𝑈 = 𝐸𝐸𝑚𝑚0 =
𝐸𝐸𝑘𝑘0 + 𝑈𝑈0 . Quest’equazione è vera soltanto se non c’è attrito fra le parti del sistema.
La forza di gravità è un esempio di una categoria di forze per le quali l’energia meccanica di un sistema si conserva.
Queste sono chiamate forze conservative. L’altra possibilità di immagazzinare energia in un sistema oltre quella cinetica
e potenziale è l’energia interna; quindi, una forza conservativa è una forza tra i membri di un sistema che non causa
trasformazioni di energia meccanica in energia interna dentro il sistema. Il lavoro svolto da una forza conservativa ha
una particolare proprietà: è indipendente dalla traiettoria seguita dai componenti del sistema e dipende soltanto dalla
configurazione iniziale e finale del sistema. Da questo segue che, quando un componente del sistema si muove lungo un
percorso chiuso, il lavoro svolto dalla forza conservativa è zero.
Una forza non-conservativa, invece, è una forza fra i componenti di un sistema che causa dentro il sistema
trasformazioni di energia meccanica in energia interna. Un comune esempio è la forza d’attrito, che causa il
riscaldamento dell’oggetto e della superficie su cui scorre. Per forze non conservative, inoltre, il lavoro dipende dalla
traiettoria seguita e non è nulla su un percorso chiuso.
Indipendentemente dal fatto che le forze agenti siano conservative o non-conservative, l’energia totale di un sistema
isolato (cinetica, potenziale ed interna) si conserva. Mai alcuna violazione di questo principio di conservazione critico è
stata osservata: se consideriamo, infatti, l’Universo come un sistema isolato, questa affermazione dichiara che nel nostro
Universo esiste una quantità fissa di energia e che tutti i processi all’interno dell’Universo rappresentano trasformazioni
di energia da un tipo ad un altro.
La formula per l’energia potenziale gravitazionale 𝑈𝑈𝑔𝑔 = 𝑚𝑚𝑚𝑚ℎ è valida per oggetti posti in prossimità della superficie
terrestre; tuttavia, esiste una formula più generale indipendente dalla distanza di separazione fra l’oggetto e la Terra.
Tale formula è la seguente: 𝑈𝑈𝑔𝑔 = −𝐺𝐺
𝑚𝑚1 𝑚𝑚2
𝑟𝑟
, dove r è la distanza fra i centri dei due oggetti. Anche la forza elettrostatica
fra due particelle, che ha un’espressione simile alla legge di gravitazione universale di Newton, consente di ricavare una
formula che esprima l’energia potenziale elettrica: 𝑈𝑈𝑒𝑒 = 𝑘𝑘𝑒𝑒
𝑞𝑞1 𝑞𝑞2
𝑟𝑟
. La differenza maggiore, oltre alla presenza delle
cariche al posto delle masse e la differente costante in uso, è la mancanza del segno negativo. Questo è dovuto al fatto
che il segno è automaticamente fornito dai segni delle cariche: se sono concordi, l’energia potenziale elettrica sarà
positiva (poiché la forza è repulsiva), se invece sono discordi, l’energia potenziale sarà negativa (e la forza attrattiva).
Urti e Quantità di Moto
Per descrivere un oggetto in moto, si può far ricorso al concetto di quantità di moto (o momento lineare), la cui somma
per le particelle in un sistema isolato si conserva. Essa è il prodotto della massa della particella per la velocità a cui si
muove. In simboli, 𝑝𝑝⃗ ≡ 𝑚𝑚𝑣𝑣⃗. La quantità di moto è, dunque, un vettore, dal momento che è il prodotto di un vettore per
uno scalare. La sua direzione e verso sono gli stessi della velocità. Nel SI si misura in 𝑘𝑘𝑘𝑘 ∙ 𝑚𝑚⁄𝑠𝑠. Per un corpo che si muova
nello spazio tridimensionale, l’equazione può essere scomposta in 𝑝𝑝𝑥𝑥 = 𝑚𝑚𝑣𝑣𝑥𝑥 , 𝑝𝑝𝑦𝑦 = 𝑚𝑚𝑣𝑣𝑦𝑦 e 𝑝𝑝𝑧𝑧 = 𝑚𝑚𝑣𝑣𝑧𝑧 .
Dispensa di Fisica Medica
MV
9
Applicando la Seconda Legge di Newton alla quantità di moto, otteniamo che la forza risultante agente su una particella
𝑑𝑑𝑝𝑝⃗
𝑑𝑑(𝑚𝑚𝑣𝑣
�⃗)
avente quantità di moto 𝑝𝑝⃗ è uguale alla variazione nel tempo di detta quantità di moto. In formula, ∑ 𝐹𝐹⃗ = 𝑑𝑑𝑑𝑑 = 𝑑𝑑𝑑𝑑 =
𝑚𝑚
𝑑𝑑𝑣𝑣
�⃗
𝑑𝑑𝑑𝑑
= 𝑚𝑚𝑎𝑎⃗ (se la massa della particella è costante).
In un sistema isolato, le componenti del moto nelle direzioni x, y e z si conservano indipendentemente. Questo risultato,
noto come principio di conservazione della quantità di moto, può essere riassunto come “la quantità di moto totale di
un sistema isolato è costante”; questo principio è valido indipendentemente dalla natura delle forze considerate, anche,
cioè, se le forze non sono conservative.
Come detto prima, se la forza risultante è uguale alla variazione della quantità di moto nell’unità di tempo, allora la
quantità di moto sarà uguale al prodotto della forza (risultante) per l’intervallo di tempo entro cui essa agisce.
𝑡𝑡
L’integrazione di questa espressione ci porta alla formula ∆𝑝𝑝⃗ = 𝑝𝑝⃗ − ����⃗
𝑝𝑝0 = ∫ ∑ 𝐹𝐹⃗ 𝑑𝑑𝑑𝑑 . L’integrale della forza rispetto
𝑡𝑡0
all’intervallo di tempo durante il quale essa agisce si chiama impulso della forza ed è un vettore avente stessa direzione
e verso della quantità di moto (e stesse dimensioni).
Il cosiddetto teorema dell’impulso afferma che l’impulso totale di una forza risultante ∑ 𝐹𝐹⃗ su una particella eguaglia la
variazione della quantità di moto della particella. In simboli, 𝐼𝐼⃗ = ∆𝑝𝑝⃗. Useremo spesso un’approssimazione sull’impulso:
assumeremo che l’intervallo di tempo sia breve e che una delle forze che contribuiscono alla forza risultante superi di
molto le altre per intensità; con questa approssimazione, possiamo trascurare gli effetti delle altre forze senza problemi.
La legge di conservazione della quantità di moto può essere utilizzata per descrivere ciò che avviene negli urti fra due
oggetti. Useremo l’approssimazione dell’impulso, assumendo che le forze dovute all’urto siano molto più intense di tutte
le forze esterne presenti. L’urto può essere macroscopicamente inteso come il risultato di un contatto fra due oggetti,
ma questa definizione mal si applica agli urti microscopici, dal momento che due particelle con la stessa carica (per
esempio, un protone ed una particella alfa, entrambi carichi positivamente) si respingono senza che avvenga alcun
contatto: l’urto, tuttavia, è avvenuto.
L’urto si definisce urto anelastico quando l’energia cinetica non si conserva (anche se la quantità di moto si conserva).
Per esempio, l’urto di una palla di gomma contro un tavolo è anelastico, poiché parte dell’energia cinetica della palla si
trasforma in energia interna con la deformazione. Gli urti anelastici sono utilizzati in medicina per la rilevazione della
pressione intraoculare: una macchina detta tonometro invia uno sbuffo di aria contro la superficie esterna dell’occhio e
misura la velocità con cui essa viene riflessa. A pressione normale, molta energia cinetica viene dissipata (poiché l’occhio
è morbido) e la velocità è bassa. A pressioni più alte (patologiche), l’occhio è rigido e dissipa poca energia cinetica, con
il risultato di riflettere l’aria a velocità maggiore. Quando due oggetti che si urtano rimangono uniti l’uno all’altro (quindi
viene dissipata TUTTA l’energia cinetica), l’urto è detto perfettamente anelastico. È quanto accade quando, per
esempio, un meteorite cade sulla Terra e vi rimane sepolto.
Un urto elastico, invece, è un urto in cui l’energia cinetica si conserva (così come la quantità di moto): nel mondo
macroscopico, gli urti sono elastici solo approssimativamente, poiché parte dell’energia cinetica è sempre dispersa sotto
forma di calore o suono (come in una partita a biliardo). A livello atomico e subatomico, invece, si possono avere delle
vere e proprie collisioni elastiche. Ad ogni modo, è bene convenire che elasticità ed anelasticità degli urti sono condizioni
limite: nella realtà avvengono sempre casi intermedi.
Moto Rotazionale
Quando un corpo esteso, come una ruota, ruota intorno al proprio asse, il moto non può essere analizzato considerando
il corpo come una particella, in quanto ad ogni istante le differenti parti del corpo si muovono con velocità differenti ed
in direzioni differenti. Possiamo, comunque, analizzare il moto considerando il corpo esteso come composto da un
insieme di particelle in moto.
Dispensa di Fisica Medica
MV
10
Per indicare la posizione di un corpo rotante (posizione rotazionale o posizione angolare), possiamo utilizzare la sua
orientazione (cioè l’angolo) relativa a una qualche direzione fissa di riferimento. Quando un corpo ruota, una sua
particella situata sul punto P descriverà un arco di lunghezza s sul percorso circolare di raggio r; la sua posizione angolare
𝑠𝑠
sarà uguale a 𝜗𝜗 = . ATTENZIONE: l’angolo 𝜗𝜗 è il rapporto fra un arco ed un raggio, pertanto è un numero puro. Gli
𝑟𝑟
attribuiamo, tuttavia, l’unità di misura artificiale di radiante (rad), definito come “l’angolo sotteso da un arco di
lunghezza uguale al raggio”. Poiché la lunghezza della circonferenza è 2𝜋𝜋𝜋𝜋, 360° corrispondono ad un angolo di 2𝜋𝜋 rad.
𝜋𝜋
Per convertire, quindi, un angolo espresso in gradi in un angolo in radianti, usiamo la formula 𝜗𝜗(𝑟𝑟𝑟𝑟𝑟𝑟) = 180° 𝜗𝜗(𝑑𝑑𝑑𝑑𝑑𝑑) (es.
𝜋𝜋
𝜋𝜋
𝜋𝜋
60° = ; 45° = ; 30° = ).
3
4
6
La velocità angolare media si definisce come il rapporto dello spostamento angolare del corpo rigido e l’intervallo di
tempo ∆𝑡𝑡 entro cui avviene lo spostamento: 𝜔𝜔𝑚𝑚𝑚𝑚𝑚𝑚 ≡
𝜗𝜗−𝜗𝜗0
𝑡𝑡−𝑡𝑡0
=
∆𝜗𝜗
∆𝑡𝑡
.
Analogamente alla velocità lineare, la velocità angolare istantanea è definita come il limite, per ∆𝑡𝑡 tendente a zero, del
∆𝜗𝜗
rapporto ∆𝜗𝜗⁄∆𝑡𝑡 : 𝜔𝜔 ≡ 𝑙𝑙𝑙𝑙𝑙𝑙
∆𝑡𝑡→0 ∆𝑡𝑡
adimensionale).
=
𝑑𝑑𝑑𝑑
𝑑𝑑𝑑𝑑
. L’unità di misura è il 𝑟𝑟𝑟𝑟𝑟𝑟⁄𝑠𝑠 oppure il 𝑠𝑠 −1 (essendo il radiante una grandezza
Se la velocità angolare istantanea di una particella varia dal valore 𝜔𝜔0 ad 𝜔𝜔 nell’intervallo di tempo ∆𝑡𝑡, la particella ha
un’accelerazione angolare. L’accelerazione angolare media 𝛼𝛼𝑚𝑚𝑒𝑒𝑒𝑒 di una particella in moto lungo una traiettoria
circolare è definita dal rapporto fra la variazione di velocità angolare e l’intervallo di tempo: 𝛼𝛼𝑚𝑚𝑚𝑚𝑚𝑚 ≡
𝜔𝜔−𝜔𝜔0
𝑡𝑡−𝑡𝑡0
=
∆𝜔𝜔
∆𝑡𝑡
.
In analogia con l’accelerazione lineare, l’accelerazione angolare istantanea è definita come il limite, per ∆𝑡𝑡 tendente a
zero, del rapporto ∆𝜔𝜔⁄∆𝑡𝑡: 𝛼𝛼 ≡ 𝑙𝑙𝑙𝑙𝑙𝑙
∆𝜔𝜔
∆𝑡𝑡→0 ∆𝑡𝑡
=
𝑑𝑑𝑑𝑑
𝑑𝑑𝑑𝑑
. L’accelerazione angolare si misura in 𝑟𝑟𝑟𝑟𝑟𝑟⁄𝑠𝑠 2 oppure in 𝑠𝑠 −2 .
Quando un corpo rigido ruota attorno ad un asse fisso, ogni particella del corpo ruota attorno a quest’asse dello stesso
angolo, in un dato intervallo di tempo, ed ha la stessa velocità angolare e la stessa accelerazione angolare.
Le leggi del moto traslazionale unidimensionale possono essere applicate anche al moto rotazionale, sostituendo
l’accelerazione angolare all’accelerazione, la velocità angolare alla velocità e la posizione angolare alla posizione: 𝜔𝜔 =
1
1
𝜔𝜔0 + 𝛼𝛼𝛼𝛼, 𝜗𝜗 = 𝜗𝜗0 + 𝜔𝜔0 𝑡𝑡 + 2 𝛼𝛼𝑡𝑡 2, 𝜔𝜔2 = 𝜔𝜔0 2 + 2𝛼𝛼(𝜗𝜗 − 𝜗𝜗0 ) e 𝜗𝜗 = 𝜗𝜗0 + 2 (𝜔𝜔0 + 𝜔𝜔)𝑡𝑡.
Poiché, quando un corpo rigido ruota intorno ad un asse fisso, ogni sua particella percorre una circonferenza, esiste
anche una velocità traslazionale sempre tangente alla traiettoria, detta velocità tangenziale, il cui modulo è dato, per
definizione, da 𝑑𝑑𝑑𝑑 ⁄𝑑𝑑𝑑𝑑 , dove s è lo spazio percorso dalla particella lungo la circonferenza, ovvero 𝑠𝑠 = 𝑟𝑟𝑟𝑟; poiché r è
costante, si ha: 𝑣𝑣 =
𝑑𝑑𝑑𝑑
𝑑𝑑𝑑𝑑
= 𝑟𝑟
𝑑𝑑𝑑𝑑
𝑑𝑑𝑑𝑑
= 𝑟𝑟𝑟𝑟, cioè il modulo delle velocità tangenziale della particella è uguale al prodotto della
distanza della particella dall’asse di rotazione per la velocità angolare della particella stessa.
Possiamo calcolare anche un’accelerazione tangenziale, uguale alla variazione della velocità tangenziale nel tempo,
come 𝑎𝑎𝑡𝑡 =
𝑑𝑑𝑑𝑑
𝑑𝑑𝑑𝑑
= 𝑟𝑟
𝑑𝑑𝑑𝑑
𝑑𝑑𝑑𝑑
= 𝑟𝑟𝑟𝑟, cioè la componente tangenziale dell’accelerazione traslazionale della particella sottoposta
al moto circolare è uguale al prodotto della distanza della particella dall’asse di rotazione per l’accelerazione angolare.
Come abbiamo visto in precedenza, una particella in moto in una traiettoria circolare è sottoposta ad un’accelerazione
centripeta, o radiale, di modulo 𝑣𝑣 2 ⁄𝑟𝑟 , diretta verso il centro di rotazione. Poiché 𝑣𝑣 = 𝑟𝑟𝑟𝑟 , possiamo esprimere
l’accelerazione centripeta della particella in funzione della velocità angolare, come 𝑎𝑎𝑐𝑐 =
𝑣𝑣 2
𝑟𝑟
= 𝑟𝑟𝜔𝜔2 . L’accelerazione
traslazionale totale della particella è 𝑎𝑎⃗ = 𝑎𝑎⃗𝑡𝑡 + 𝑎𝑎⃗𝑟𝑟 , quindi il suo modulo sarà 𝑎𝑎 = �𝑎𝑎𝑡𝑡 2 + 𝑎𝑎𝑟𝑟 2 = √𝑟𝑟 2 𝛼𝛼 2 + 𝑟𝑟 2 𝜔𝜔 2 =
𝑟𝑟√𝛼𝛼 2 + 𝜔𝜔 4.
Dispensa di Fisica Medica
MV
11
Assimilando un corpo rigido ad un insieme di particelle ed assumendo che esso ruoti attorno ad un asse fisso con velocità
angolare 𝜔𝜔, possiamo dire che ciascuna particella è in moto, cosicché ha una certa energia cinetica, determinata dalla
massa e dalla velocità tangenziale. Sia 𝑚𝑚𝑖𝑖 la massa dell’i-esima particella e 𝑣𝑣𝑖𝑖 la sua velocità, l’energia cinetica di questa
1
particella sarà uguale a 𝐸𝐸𝑘𝑘𝑘𝑘 = 𝑚𝑚𝑖𝑖 𝑣𝑣𝑖𝑖 2 . Possiamo, quindi, esprimere l’energia cinetica totale del corpo come la somma
2
1
1
1
delle energie cinetiche delle singole particelle. Cioè, 𝐸𝐸𝑘𝑘(𝑇𝑇𝑇𝑇𝑇𝑇) = ∑𝑖𝑖 𝐸𝐸𝑘𝑘𝑘𝑘 = ∑𝑖𝑖 2 𝑚𝑚𝑖𝑖 𝑣𝑣𝑖𝑖 2 = 2 ∑𝑖𝑖 𝑚𝑚𝑖𝑖 𝑟𝑟𝑖𝑖 2 𝜔𝜔2 = 2 (∑𝑖𝑖 𝑚𝑚𝑖𝑖 𝑟𝑟𝑖𝑖 2 )𝜔𝜔2 ,
dove abbiamo messo in evidenza 𝜔𝜔2 perché è uguale per tutte le particelle. La grandezza in parentesi è chiamata
momento d’inerzia del corpo rigido: 𝐼𝐼 = ∑𝑖𝑖 𝑚𝑚𝑖𝑖 𝑟𝑟𝑖𝑖 2 . Possiamo, quindi, esprimere l’energia cinetica del corpo rigido che
1
ruota attorno all’asse, cioè l’energia cinetica rotazionale, come 𝐸𝐸𝑘𝑘(𝑇𝑇𝑇𝑇𝑇𝑇) = 𝐼𝐼𝜔𝜔2 .
2
Quando su un corpo rigido imperniato su un certo asse si esercita una forza risultante e la retta d’azione (cioè la linea
immaginaria co-lineare al vettore forza ed estesa all’infinito nei due versi) della forza non passa attraverso il perno, il
corpo tende a ruotare attorno a quest’asse. La tendenza di una forza a far ruotare un corpo attorno a un certo asse si
misura con una grandezza (vettoriale) chiamata momento della forza (o momento meccanico). Esso è l’analogo nel
moto rotazionale della forza che causa le variazioni nel moto traslazionale, poiché è la causa delle variazioni nel moto
rotatorio. La forza applicata 𝐹𝐹⃗ che agisce formando un angolo 𝜑𝜑 rispetto al vettore posizione 𝑟𝑟⃗ che localizza il punto di
applicazione della forza, ha un momento di modulo 𝜏𝜏 ≡ 𝑟𝑟𝑟𝑟 𝑠𝑠𝑠𝑠𝑠𝑠 𝜑𝜑. La grandezza 𝑟𝑟 𝑠𝑠𝑠𝑠𝑠𝑠 𝜑𝜑, indicata con d, è chiamata
braccio del momento (o braccio della forza) e rappresenta la distanza fra l’asse di rotazione e la retta d’azione di 𝐹𝐹⃗ .
Quindi, possiamo definire il momento della forza come 𝜏𝜏 = 𝐹𝐹(𝑟𝑟 𝑠𝑠𝑠𝑠𝑠𝑠 𝜑𝜑) = 𝐹𝐹𝐹𝐹, oppure come prodotto vettoriale di 𝑟𝑟⃗ ed
𝐹𝐹⃗ , cioè 𝜏𝜏⃗ ≡ 𝑟𝑟⃗ × 𝐹𝐹⃗ ≡ 𝑟𝑟𝑟𝑟 𝑠𝑠𝑠𝑠𝑠𝑠 𝜑𝜑. Il momento di una forza non deve essere confuso con la forza: esso dipende dalla forza,
ma anche da dove essa è applicata. Inoltre, esso ha le dimensioni di una forza per una lunghezza e si misura in 𝑁𝑁 ∙ 𝑚𝑚.
Alla luce del moto rotazionale, perché un corpo sia in equilibrio sono necessarie due condizioni: la risultante delle forze
esterne agenti sul corpo deve essere uguale a zero: in simboli, ∑ 𝐹𝐹⃗ = 0 (condizione di equilibrio traslazionale); inoltre,
anche la risultante dei momenti delle forze esterne deve essere uguale a zero (rispetto a qualsiasi asse): in simboli,
∑ 𝜏𝜏⃗ = 0 (condizione di equilibrio rotazionale). Le due equazioni vettoriali sono equivalenti a sei equazioni scalari: tre
derivanti dalla prima e tre dalla seconda. Limitando, però, il campo di interesse (ovvero considerando le forze tutte
giacenti nel piano xy), bastano tre equazioni per definire l’equilibrio statico: ∑ 𝐹𝐹𝑥𝑥 = 0, ∑ 𝐹𝐹𝑦𝑦 = 0 e ∑ 𝜏𝜏𝑧𝑧 = 0.
Possiamo ricavare un analogo rotazionale della Seconda Legge di Newton, ovvero: ∑ 𝜏𝜏 = 𝐼𝐼𝐼𝐼, cioè il momento risultante
delle forze agenti su un corpo rigido è proporzionale alla sua accelerazione angolare, e la costante di proporzionalità è il
momento d’inerzia.
Il momento della quantità di moto è chiamato momento angolare ed è uguale al prodotto vettoriale del vettore
posizione 𝑟𝑟⃗ e del vettore quantità di moto 𝑝𝑝⃗. In simboli, 𝐿𝐿�⃗ ≡ 𝑟𝑟⃗ × 𝑝𝑝⃗ . Poiché 𝑝𝑝⃗ = 𝑚𝑚𝑣𝑣⃗ , il modulo di 𝐿𝐿�⃗ è dato da 𝐿𝐿 =
𝑚𝑚𝑚𝑚𝑚𝑚 𝑠𝑠𝑠𝑠𝑠𝑠 𝜑𝜑, dove 𝜑𝜑 è l’angolo compreso fra 𝑟𝑟⃗ e 𝑝𝑝⃗. Ne segue che L è zero quando 𝑟𝑟⃗ è parallelo a 𝑝𝑝⃗. D’altra parte, quando
𝑟𝑟⃗ è perpendicolare a 𝑝𝑝⃗, L assumerà il suo valore massimo 𝑚𝑚𝑚𝑚𝑚𝑚. Sulla base del momento angolare, possiamo affermare
che il momento di una forza non è altro che la variazione nel tempo del momento angolare della particella: in simboli,
𝜏𝜏⃗ =
𝑑𝑑𝐿𝐿�⃗
𝑑𝑑𝑑𝑑
(analogo rotazionale della formula 𝐹𝐹⃗ =
𝑑𝑑𝑝𝑝⃗
𝑑𝑑𝑑𝑑
). Come, inoltre, la quantità di moto totale di un sistema di particelle
rimane costante quando la risultante delle forze esterne agenti sul sistema è nulla, così il momento angolare totale di
un sistema resta costante se il momento risultante delle forze esterne agenti sul sistema è nullo.
Moto Oscillatorio
Nel caso del moto oscillatorio, il modello sperimentale di uso corrente è quello di un oggetto di massa m attaccato ad
una molla orizzontale. Se la molla non è deformata, l’oggetto rimane fermo (su una superficie priva di attrito) nella sua
posizione di equilibrio, definita come 𝑥𝑥 = 0. Se l’oggetto è tirato di lato nella posizione 𝑥𝑥, e poi rilasciato, esso oscillerà
avanti e indietro fra le posizioni 𝑥𝑥 e – 𝑥𝑥. Per eliminare gli effetti della dimensione dell’oggetto, si usa il modello del punto
materiale. Quando una particella è soggetta ad una forza di richiamo lineare (data dalla legge di Hooke 𝐹𝐹 = −𝑘𝑘𝑘𝑘), il
Dispensa di Fisica Medica
MV
12
moto che essa segue è un particolare tipo di moto oscillatorio detto moto armonico semplice. Un sistema sottoposto a
𝑘𝑘
tale moto si chiama oscillatore armonico semplice. Se 𝐹𝐹 = −𝑘𝑘𝑘𝑘, allora – 𝑘𝑘𝑘𝑘 = 𝑚𝑚𝑚𝑚, da cui segue che 𝑎𝑎 = − 𝑚𝑚 𝑥𝑥, ovvero
l’accelerazione di una particella in moto armonico semplice è proporzionale allo spostamento della particella dalla sua
posizione di equilibrio ed è in verso opposto. La particella completa un intero ciclo del suo moto quando ritorna alla sua
posizione iniziale, passando ancora per 𝑥𝑥 = 0 con la sua velocità massima.
Il periodo T del moto è definito come il tempo necessario alla particella per compiere un ciclo completo;
matematicamente, 𝑇𝑇 =
2𝜋𝜋
𝜔𝜔
𝑚𝑚
, dove 𝜔𝜔 è la frequenza angolare (misurata in radianti/s): 𝜔𝜔 = 2𝜋𝜋� , dove m è la massa
𝑘𝑘
della particella e k la costante elastica della molla. In funzione del periodo, la frequenza angolare può anche essere
calcolata come 𝜔𝜔 =
2𝜋𝜋
𝑇𝑇
.
Il reciproco del periodo di chiama frequenza f del moto e rappresenta il numero di oscillazioni che la particella compie
1
𝜔𝜔
nell’unità di tempo. L’unità di misura della frequenza è l’Hertz (Hz), equivalente al 𝑠𝑠 −1 . In formula, 𝑓𝑓 = 𝑇𝑇 = 2𝜋𝜋 . In
funzione della frequenza, la frequenza angolare può essere espressa come 𝜔𝜔 = 2𝜋𝜋𝜋𝜋.
Se un oggetto attaccato ad una molla scivola su una superficie priva di attrito, possiamo considerare la combinazione
molla-oggetto come un sistema isolato ed applicarvi le relative leggi. Pertanto, l’energia meccanica del sistema è pari
1
ad 𝐸𝐸𝑚𝑚 = 𝑘𝑘𝐴𝐴2 , dove k è la costante elastica della molla ed A è l’ampiezza del moto (ovvero lo spostamento massimo).
2
Il pendolo semplice è un altro sistema meccanico che si muove di moto periodico. Esso consiste di un punto materiale di
massa m sospeso ad un filo (di massa trascurabile) di lunghezza L, la cui estremità superiore è fissata. Un pendolo reale,
purché la dimensione dell’oggetto sia piccola rispetto alla lunghezza del filo, può essere assimilato ad un pendolo
semplice. Quando il pendolo è tirato lateralmente e poi rilasciato, esso oscilla intorno al punto più basso, la posizione di
equilibrio. Poiché il moto è dovuto alla forza di gravità 𝑚𝑚𝑔𝑔⃗, possiamo calcolare delle formule valide per piccoli angoli
𝑔𝑔
(minori di 10°). In particolare, la frequenza angolare è uguale a 𝜔𝜔 = � (dove g è il modulo dell’accelerazione di gravità
ed L la lunghezza del filo). Il periodo, di conseguenza, è pari a 𝑇𝑇 =
𝐿𝐿
2𝜋𝜋
𝜔𝜔
𝐿𝐿
= 2𝜋𝜋� . Si dimostra, quindi, che per piccole
𝑔𝑔
oscillazioni il periodo e la frequenza angolare di un pendolo semplice dipendono soltanto dalla lunghezza del filo e non
dalla massa dell’oggetto, per cui sperimentalmente si troverà che tutti i pendoli semplici di uguale lunghezza oscillano
con lo stesso periodo (purché g sia costante).
Onde Meccaniche
Le onde meccaniche (ad es. le onde acustiche o l’ondulazione dell’acqua dovuta ad un sasso gettatovi) sono onde la cui
perturbazione si propaga attraverso un mezzo, come l’aria o l’acqua. Esse si distinguono dalle onde elettromagnetiche
(ad es. le onde luminose o le onde radio) che, invece, non necessitano di un mezzo per propagarsi.
La propagazione di una perturbazione è un trasferimento di energia senza trasferimento di materia; tutte le onde
trasportano energia, ma la quantità di energia trasmessa differisce da caso a caso, così come il meccanismo responsabile
del trasferimento. Tutte le onde meccaniche richiedono una sorgente di perturbazione, un mezzo che possa essere
perturbato e un meccanismo fisico per cui le particelle del mezzo possano influenzarsi (cioè che consenta la propagazione
della perturbazione). Le onde possono essere trasversali o longitudinali: nel primo caso, le particelle del mezzo perturbato
si muovono perpendicolarmente alla velocità dell’onda; nel secondo, invece, esse subiscono uno spostamento parallelo
alla direzione del moto dell’onda (è questo il caso delle onde sonore).
Dispensa di Fisica Medica
MV
13
Partendo da un esempio di una corda con un’estremità fissata, cui diamo un impulso all’altra estremità, possiamo
verificare come lo scuotimento continuo generi un’onda continua, detta onda sinusoidale, per la forma che essa assume.
Il punto di massimo spostamento positivo della corda si chiama cresta, mentre il punto più basso è detto avvallamento.
La cresta e l’avvallamento si muovono con l’onda, per cui un particolare punto della corda alternerà la sua posizione fra
una cresta ed un avvallamento.
Per descrivere un’onda sinusoidale, si fa riferimento a tre caratteristiche fisiche: la lunghezza d’onda, la frequenza e la
velocità. La lunghezza d’onda è la distanza minima fra due punti che si comportano identicamente (ad es. due creste o
due avvallamenti adiacenti) e si indica con il simbolo λ. La frequenza f delle onde sinusoidali è identica alla frequenza
del moto armonico semplice ed è, quindi, l’inverso del periodo T, definito come il tempo necessario affinché un
elementino del mezzo effettui un’oscillazione completa. La velocità d’onda v è la velocità con cui le onde si propagano
in uno specifico mezzo e dipende, pertanto, dalle sue caratteristiche. Un altro parametro importante è l’ampiezza
dell’onda A, che corrisponde al massimo spostamento della particella del mezzo dalla sua posizione d’equilibrio. Velocità,
lunghezza d’onda, frequenza e periodo sono legati dalla relazione 𝑣𝑣 =
del moto armonico semplice, cioè: 𝜔𝜔 ≡
2𝜋𝜋
𝑇𝑇
= 2𝜋𝜋𝜋𝜋.
𝜆𝜆
𝑇𝑇
= 𝜆𝜆𝑓𝑓. La frequenza angolare è identica a quella
Quando un impulso che si propaga raggiunge una discontinuità, una parte o tutto l’impulso verrà riflesso. La parte non
riflessa si dice che viene trasmessa attraverso la discontinuità. Nell’esempio della corda fissata ad un’estremità al muro,
quando l’impulso raggiunge l’estremità fissa, poiché la superficie è rigida, nessuna parte dell’impulso è trasmessa ed
esso è totalmente riflesso. Si noti che l’impulso riflesso ha esattamente la stessa ampiezza dell’impulso in arrivo, ma è
invertito.
Se due o più onde che si propagano si muovono in un mezzo e si combinano in un dato punto, lo spostamento risultante
del mezzo in quel punto è la somma degli spostamenti delle singole onde (principio di sovrapposizione). Non tutte le
onde obbediscono, però, a questo principio: quelle che lo fanno sono dette onde lineari ed hanno un’ampiezza piccola
rispetto alla lunghezza d’onda. La combinazione di onde diverse nella stessa regione di spazio è detta interferenza (ma
essa non è un effetto permanente, esiste soltanto fintanto che le onde condividono la stessa regione di spazio). Se le
onde sono “in fase”, cioè i picchi e gli zeri delle singole onde si presentano sempre nella stessa posizione, esse
interferiscono “costruttivamente”, generando, cioè, un’onda risultante che ha un’ampiezza pari alla somma delle singole
ampiezze. Se, invece, le onde sono “fuori fase”, ovvero ad un picco dell’una corrisponde una valle dell’altra, i loro
spostamenti si annullano in ogni punto e l’onda risultante ha ampiezza zero ovunque: esse interferiscono
“distruttivamente”. Esistono, infine, casi intermedi.
Statica dei Fluidi
La materia viene abitualmente considerata in uno dei tre stati: solido, liquido o gassoso. Un solido ha forma e volume
definiti, un liquido ha un volume definito, ma assume la forma del recipiente che lo contiene ed un gas non ha né forma
né volume definiti. Un insieme di molecole sistemate in modo casuale e tenute insieme da deboli forze di coesione e da
forze esercitate dalle pareti del contenitore si chiama fluido. Questa definizione risulta comprendere sia i liquidi sia i gas.
Se applichiamo una forza non perpendicolare sulla superficie di un oggetto solido, esso subirà una distorsione. Nel nostro
modello semplificato, i fluidi non sono viscosi (non hanno, cioè, attrito fra strati adiacenti) e non sostengono, pertanto,
questo tipo do forze (dette forze di taglio): l’unico tipo di forza applicabile è, quindi, quella perpendicolare alla superficie.
La forza che un fluido esercita su una superficie trae origine dall’urto delle molecole del fluido con la superficie: ciascuna
collisione produce una forza sulla superficie. Ogni secondo, avviene un numero enorme di queste forze, che danno luogo
ad una forza macroscopica che si distribuisce uniformemente su tutta l’area della superficie. Questa forza è in relazione
con una grandezza chiamata pressione. La pressione (che è uno scalare!) è misurata come la forza esercitata dal fluido
Dispensa di Fisica Medica
MV
14
𝐹𝐹
sulla superficie dello strumento di misura. In simboli, 𝑝𝑝 ≡ . La sua unità di misura è il 𝑁𝑁⁄𝑚𝑚2 , anche detto Pascal (Pa).
𝐴𝐴
Attenzione a non confondere forza e pressione: oltre al fatto che la prima è un vettore, mentre la seconda è uno scalare,
esse possono anche avere valori molto diversi fra loro. Es. un ago ipodermico esercita una grandissima pressione (tale
da perforare la cute) in virtù di una piccola forza, ma applicata in un’ancor più piccola superficie. All’opposto, le racchette
usate per camminare sulla neve distribuiscono una grande forza (la forza-peso) su una grande superficie, generando una
pressione minore, tale da non far sprofondare la persona.
L’atmosfera esercita una pressione sulla superficie della Terra e su tutti gli oggetti sulla superficie. Tale pressione, detta
pressione atmosferica, è uguale a 𝑝𝑝0 = 1.00 𝑎𝑎𝑎𝑎𝑎𝑎 ≈ 1.013 × 105 𝑃𝑃𝑃𝑃.
Come ben sanno i subacquei, la pressione nel mare o in un lago aumenta quando il sub nuota verso il fondo.
Analogamente, la pressione atmosferica decresce con l’altitudine. Questo fenomeno è descritto dalla seguente
equazione, che indica come la pressione esercitata su un immaginario cilindro di liquido vari linearmente con la
profondità: 𝑝𝑝 = 𝑝𝑝0 + 𝜌𝜌𝜌𝜌ℎ, dove 𝑝𝑝0 è la pressione atmosferica, 𝜌𝜌 è la densità del fluido, g è l’accelerazione di gravità ed
h è la profondità (o l’altitudine). La pressione è, perciò, la stessa in tutti i punti che hanno la stessa profondità,
indipendentemente dalla forma del recipiente.
Sulla base dell’equazione di cui sopra, ogni aumento della pressione alla superficie deve essere trasmesso in tutti i punti
del liquido. Questa legge, scoperta dal francese Blaise Pascal e perciò detta legge di Pascal, enuncia quanto segue: una
variazione di pressione applicata ad un fluido chiuso è trasmessa integralmente in ogni punto del fluido ed alle pareti del
contenitore. La legge di Pascal è il principio della pressa idraulica, ma anche del tubetto di dentifricio.
La forza di galleggiamento è una forza (o spinta) verso l’alto che si esercita su un oggetto circondato da un fluido, relativa
al sostegno parziale offerto dall’acqua a qualsiasi oggetto che vi si trovi immerso. Secondo il principio di Archimede,
“ogni oggetto immerso parzialmente o totalmente in un fluido subisce una spinta verso l’alto la cui intensità è uguale al
peso del fluido spostato dall’oggetto”. In simboli, 𝐵𝐵 = 𝜌𝜌𝑓𝑓 𝑔𝑔𝑔𝑔, dove 𝜌𝜌𝑓𝑓 è la densità del fluido, NON del corpo. Perciò, la
spinta che agisce su un cubo d’acciaio è la stessa che agisce su di un cubo di fluido delle stesse dimensioni.
Nel caso di un oggetto completamente immerso, il volume del liquido spostato è lo stesso dell’oggetto (𝑉𝑉 = 𝑉𝑉0 ). Se la
densità dell’oggetto è minore di quella del fluido, la forza risultante è positiva e l’oggetto accelera verso l’alto. Al
contrario, se il corpo ha densità maggiore di quella del liquido, la forza risultante è negativa e l’oggetto affonda.
Nel caso di un oggetto in equilibrio statico, che galleggi sulla superficie di un fluido (cioè che sia solo parzialmente
immerso), il volume del fluido spostato è solo una frazione del volume totale dell’oggetto, giacché il volume del fluido
spostato è uguale al volume al di sotto della superficie del fluido. Poiché l’oggetto è in equilibrio, la spinta di Archimede
𝜌𝜌
𝑉𝑉
è equilibrata dalla forza di gravità. In simboli, 𝐵𝐵 = 𝑀𝑀𝑀𝑀 → 𝜌𝜌𝑓𝑓 𝑔𝑔𝑔𝑔 = 𝜌𝜌0 𝑔𝑔𝑉𝑉0 → 𝜌𝜌0 = 𝑉𝑉 , cioè la frazione di volume
𝑓𝑓
0
dell’oggetto al di sotto della superficie del fluido è uguale al rapporto fra la densità dell’oggetto e quella del fluido.
Dinamica dei Fluidi
La dinamica dei fluidi è lo studio dei fluidi in movimento; invece di affrontare lo studio del moto di ciascuna particella
del fluido in funzione del tempo, si descrivono le proprietà del fluido nel suo insieme.
In un fluido in moto, si possono caratterizzare due tipi di flusso: il flusso è detto stazionario o laminare quando i cammini
seguiti da ciascuna particella del fluido non si intersecano fra di loro. In queste condizioni, la velocità del flusso in ogni
punto rimane costante nel tempo. Per velocità superiori ad un valore critico, il flusso del fluido diventa turbolento. Il
flusso turbolento è un flusso irregolare caratterizzato da alcune regioni simili a piccoli vortici.
Dispensa di Fisica Medica
MV
15
La viscosità è il grado di attrito interno nel flusso di un fluido, associato alla resistenza tra due strati adiacenti di liquido
in moto relativo. Nel nostro modello semplificato di fluidi ideali, il fluido è considerato non viscoso, oltre che
incomprimibile e dotato di flusso stazionario ed irrotazionale (cioè il momento angolare del fluido è nullo in ogni punto).
Il cammino seguito da una particella di fluido in un flusso stazionario è chiamato linea di corrente. La velocità di una
particella del fluido risulta sempre tangente in ogni punto alla linea di corrente. Due linee di corrente non possono mai
intersecarsi, altrimenti non sarebbe un flusso stazionario.
Considerando un fluido che si muova in una conduttura di sezione variabile, l’equazione di continuità dei fluidi indica
che il prodotto dell’area del tubo per la velocità del fluido (chiamato anche portata Q) in tutti i punti del tubo è costante.
In simboli, 𝐴𝐴1 𝑣𝑣1 = 𝐴𝐴2 𝑣𝑣2 (o 𝑄𝑄 = 𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐). Perciò, la velocità del fluido è maggiore dove il tubo è più stretto e minore dove è
più ampio.
Quando un fluido si muove in una regione in cui la sua altezza al di sopra della superficie terrestre o la sua velocità
cambia, la pressione del fluido varia con questo cambiamento. Questa relazione è stata scoperta dal fisico svizzero Daniel
1
Bernoulli nel 1738. L’equazione di Bernoulli, applicata al caso di un fluido ideale, recita: 𝑝𝑝 + 2 𝜌𝜌𝑣𝑣 2 + 𝜌𝜌𝜌𝜌ℎ = 𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐, ovvero
che la somma di pressione, energia cinetica per unità di volume ed energia potenziale gravitazionale per unità di volume
del fluido è costante in tutti i punti di una linea di corrente. Applicazioni del teorema di Bernoulli sono restringimenti
(stenosi, aterosclerosi) e dilatazioni (aneurismi, ectasie) dei vasi sanguigni.
Termologia e Termodinamica
La termodinamica si occupa dei concetti relativi al trasferimento di energia fra un sistema e l’ambiente circostante e le
conseguenti variazioni di temperatura o variazioni di stato. Il concetto di temperatura è connesso alla percezione di caldo
o freddo che un oggetto produce al tatto; tuttavia, la nostra pelle è sensibile alla rapidità di energia trasferita (cioè la
potenza), non alla quantità dell’energia o alla temperatura.
Immaginando due oggetti posti in un contenitore isolato in modo da formare un sistema isolato, se gli oggetti sono a
temperature diverse, dell’energia può essere scambiata fra di essi per mezzo di calore (o di radiazione elettromagnetica).
Oggetti che possono scambiare energia fra di loro in questo modo si dicono in contatto termico. Alla fine, le temperature
dei due oggetti diventeranno uguali, raggiungendo, cioè, l’equilibrio termico, ovvero la situazione in cui due oggetti in
contatto termico cessano di avere qualunque scambio di energia mediante calore.
Sulla base di queste definizioni basilari, possiamo enunciare il principio zero della termodinamica come segue: se gli
oggetti A e B sono separatamente in equilibrio termico con un terzo oggetto C, allora A e B sono in equilibrio termico fra
loro. Possiamo riferirci alla temperatura come alla proprietà che determina se un oggetto è in equilibrio termico con
altri oggetti oppure no: due oggetti in equilibrio termico fra di loro sono alla stessa temperatura.
I termometri sono dispositivi usati per misurare la temperatura, in base ad una qualche proprietà che varia al variare
della temperatura: il volume di un liquido, la pressione di un gas (mantenuto a volume costante), il colore di un oggetto
caldo, la resistenza elettrica di un conduttore, la lunghezza di un solido. Il termometro di uso comune consiste di una
massa liquida (mercurio o alcool) che si dilata in un capillare di vetro quando la sua temperatura aumenta. Poiché la
sezione del capillare è uniforme, la variazione varia linearmente con la sua lunghezza nel tubo. Il termometro può essere
tarato ponendolo in contatto con una temperatura costante ed associandovi una scala.
Una delle scale in uso è la scala centigrada o scala Celsius, che pone ai due estremi il punto di congelamento dell’acqua
(chiamato 0°C) ed il punto di ebollizione dell’acqua (chiamato 100°C). La distanza fra di essi viene divisa in 100 segmenti
uguali, ciascuno dei quali indica una variazione di temperatura di un grado Celsius.
Un’altra scala, più accurata e con il vantaggio di presentare solo temperature positive, è la scala Kelvin o della
temperatura assoluta. Il limite inferiore di questa scala (0 K) corrisponde a -273,15°C, chiamato zero assoluto, la
Dispensa di Fisica Medica
MV
16
temperatura più bassa raggiungibile in natura. L’ampiezza di un grado nella scala Kelvin è identica all’ampiezza di un
grado nella scala Celsius, per cui la conversione dall’una all’altra scala è facile: 𝑇𝑇𝐶𝐶 = 𝑇𝑇 − 273.15.
Un’altra scala, in uso nei paesi di lingua e cultura anglosassone, è la scala Fahrenheit, la cui unità (il grado Fahrenhait)
5
è uguale a di un kelvin (e di un Celsius). In questa scala, lo zero centigrado corrisponde a 32°F e il punto di ebollizione
9
9
dell’acqua è a 212°F. La conversione fra le due scale si effettua tramite la relazione 𝑇𝑇𝐹𝐹 = 5 𝑇𝑇𝐶𝐶 + 32°𝐹𝐹.
Nei termometri a liquido si utilizza una delle proprietà dell’energia termica: quella di dilatare oggetti solidi e liquidi. La
dilatazione termica complessiva di un oggetto è la conseguenza della variazione della distanza media di separazione tra
gli atomi o le molecole che lo costituiscono. Se la dilatazione termica di un oggetto è sufficientemente piccola confrontata
con le sue dimensioni iniziali, allora la variazione di ogni dimensione è approssimativamente dipendente dalla prima
potenza della variazione di temperatura.
Per un oggetto di lunghezza iniziale 𝐿𝐿𝑖𝑖 , che aumenta di una quantità ∆𝐿𝐿 per una variazione di temperatura ∆𝑇𝑇, la
variazione della lunghezza è uguale a ∆𝐿𝐿 = 𝛼𝛼𝐿𝐿𝑖𝑖 ∆𝑇𝑇, dove 𝛼𝛼 è una costante di proporzionalità propria di un determinato
materiale, chiamata coefficiente medio di dilatazione lineare (espressa in (℃)−1 ).
L’aumento di superficie di un oggetto dovuto alla variazione di temperatura è, invece, uguale a ∆𝐴𝐴 = 𝛾𝛾𝐴𝐴𝑖𝑖 ∆𝑇𝑇, dove 𝛾𝛾 è il
coefficiente medio di dilatazione quadratica (o superficiale), dato da 𝛾𝛾 = 2𝛼𝛼.
Infine, la variazione di volume di un oggetto dovuto alla variazione di temperatura è uguale a ∆𝑉𝑉 = 𝛽𝛽𝑉𝑉𝑖𝑖 ∆𝑇𝑇, dove 𝛽𝛽 è il
coefficiente medio di dilatazione cubica (o volumica), dato da 𝛽𝛽 = 3𝛼𝛼.
Introduciamo un modello semplificato per descrivere i gas: il modello dei gas perfetti. Un gas perfetto (o ideale) è un
insieme di atomi o molecole che si muovono di moto caotico (anche detto “browninao”), che hanno dimensioni così
piccole da occupare una frazione trascurabile del volume del loro contenitore e che interagiscono, fra di loro e con le
superfici del contenitore, per mezzo di urti elastici; inoltre, tra essi non si esercitano forze (di attrazione o repulsione) a
lunga distanza. Un gas reale è assimilabile ad un gas perfetto a temperature lontane dalla temperatura di liquefazione
e/o a bassa pressione. La maggior parte dei gas, a temperatura ambiente ed a pressione atmosferica, si comporta
approssimativamente come un gas perfetto.
La quantità di gas in un dato volume viene espressa comunemente in termini di numero di moli. Una mole di una
qualunque sostanza è quella massa di sostanza che contiene un numero di Avogadro (𝑁𝑁𝐴𝐴 = 6.022 × 1023) di molecole.
𝑚𝑚
Il numero di moli n presente in un campione è legato alla sua massa dalla relazione 𝑛𝑛 = , dove M è la massa molare
𝑀𝑀
della sostanza, espressa in 𝑔𝑔⁄𝑚𝑚𝑚𝑚𝑚𝑚 .
Si supponga che un gas sia contenuto in un recipiente cilindrico il cui volume possa essere variato per mezzo di un pistone
mobile. Assumeremo che il cilindro non abbia perdite e che il numero di moli del gas rimanga costante. Per un sistema
di questo tipo, gli esperimenti forniscono le seguenti informazioni:
-
Legge di Boyle-Mariotte: quando il gas viene tenuto a temperatura costante, la sua pressione è inversamente
proporzionale al volume. In formula, 𝑝𝑝 × 𝑉𝑉 = 𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐 (per 𝑇𝑇 = 𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐);
Legge di Charles (o prima legge di Gay-Lussac): quando la pressione del gas è tenuta costante, il volume è
direttamente proporzionale alla temperatura. In formula,
-
𝑉𝑉
𝑇𝑇
= 𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐 (per 𝑝𝑝 = 𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐);
Legge di Gay-Lussac (o seconda legge di Gay-Lussac): quando il volume del gas è tenuto costante, la pressione
𝑝𝑝
è direttamente proporzionale alla temperatura. In formula, = 𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐 (per 𝑉𝑉 = 𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐).
𝑇𝑇
Le tre leggi possono essere riassunte nell’equazione di stato dei gas perfetti: 𝑝𝑝𝑝𝑝 = 𝑛𝑛𝑛𝑛𝑛𝑛, dove p è la pressione, V è il
volume, n è il numero di moli, T è la temperatura assoluta ed R è una costante di proporzionalità chiamata costante
universale dei gas e uguale ad 8.314 𝐽𝐽⁄𝑚𝑚𝑚𝑚𝑚𝑚 ∙ 𝐾𝐾 (oppure a 0.082 𝐿𝐿 ∙ 𝑎𝑎𝑎𝑎𝑎𝑎⁄𝐾𝐾 ∙ 𝑚𝑚𝑚𝑚𝑚𝑚 ). La legge può essere riscritta
Dispensa di Fisica Medica
MV
17
utilizzando il numero di molecole N invece del numero di moli n; in questo caso, prende la forma di 𝑝𝑝𝑝𝑝 =
𝑅𝑅
dove 𝑘𝑘𝐵𝐵 è la costante di Boltzmann, uguale ad 𝑁𝑁 = 1.38 × 10−23 𝐽𝐽⁄𝐾𝐾.
𝐴𝐴
𝑁𝑁
𝑁𝑁𝐴𝐴
𝑅𝑅𝑅𝑅 = 𝑁𝑁𝑘𝑘𝐵𝐵 𝑇𝑇,
Il modello strutturale del gas perfetto costituisce la teoria cinetica dei gas, basata sui seguenti assunti: 1) Il numero di
molecole del gas è grande e la distanza media di separazione fra di esse è grande se confrontata con le loro dimensioni;
2) Le molecole obbediscono alle leggi del moto di Newton, ma nell’insieme il loto moto è isotropico (ovvero, ogni
molecola si può muovere in qualsiasi direzione a qualsiasi velocità); 3) Le molecole interagiscono con urti elastici
esclusivamente mediante forze che hanno effetto a breve distanza; 4) Le molecole interagiscono con urti elastici con le
pareti; 5) Il gas considerato è una sostanza pura (ovvero, tutte le molecole sono identiche).
È necessario fornire una distinzione fra energia interna e calore, prima di procedere con le leggi della termodinamica.
L’energia interna è l’energia associata con le componenti microscopiche (atomi e molecole) di un sistema, viste da un
sistema di riferimento a riposo rispetto al sistema. Essa è associata al moto traslazionale degli atomi di un gas perfetto:
più alta è la temperatura del gas, più è alta la sua energia cinetica e più è alta la sua energia interna.
Il calore, invece, è un meccanismo col quale l’energia è trasferita fra un sistema ed il suo ambiente circostante a causa
di una differenza di temperatura fra essi. Esso è anche la quantità di calore Q trasferita in questo modo. Non ha senso,
quindi, usare il termine calore in condizioni di equilibrio: si parlerà, più propriamente, della temperatura del sistema.
Unità di misura del calore sono la caloria ed il joule: una caloria (cal) è la quantità di calore necessaria per innalzare di
un grado la temperatura di 1g di acqua (precisamente da 14.5℃ a 15.5℃); un suo multiplo è la chilocaloria (kcal o Cal).
Poiché, però, il calore è un sistema di trasferimento di energia come il lavoro, si è pensato di utilizzare l’unità di misura
del lavoro, il Joule (J), anche per il calore. La conversione è effettuata per mezzo della corrispondenza esatta 1 𝑐𝑐𝑐𝑐𝑐𝑐 ≡
4.186 𝐽𝐽 (da cui consegue che 1 𝐶𝐶𝐶𝐶𝐶𝐶 ≡ 4186 𝐽𝐽).
Dalla definizione originaria di caloria, abbiamo visto che per aumentare la temperatura di un chilogrammo di acqua di
un grado occorrono 4186 joule; ma la quantità di calore necessaria per aumentare di un grado la temperatura di un
chilogrammo di una sostanza qualsiasi dipende dalla sostanza. Introduciamo, quindi, il concetto di calore specifico,
inteso come la quantità di calore necessaria per aumentare la temperatura di un kg di sostanza di un grado Celsius (o
𝑄𝑄
Kelvin, è equivalente). In simboli, 𝑐𝑐 ≡ 𝑚𝑚∆𝑡𝑡; la sua unità di misura è 𝐽𝐽⁄𝑘𝑘𝑘𝑘 ∙ ℃.
Da questa definizione, possiamo calcolare la quantità di calore come 𝑄𝑄 = 𝑚𝑚𝑚𝑚∆𝑡𝑡. La quantità 𝑚𝑚𝑚𝑚, data dal prodotto del
calore specifico della sostanza (per unità di massa) per la sua massa è chiamata capacità termica ed è, in ultima analisi,
𝑄𝑄
il rapporto fra la quantità di calore fornita ad una sostanza e l’aumento di temperatura derivatone. In formula, 𝑚𝑚𝑚𝑚 = ∆𝑡𝑡.
Quando dell’energia viene trasferita tra una sostanza ed il suo ambiente circostante, generalmente la sostanza subisce
un aumento di temperatura. Vi sono, tuttavia, situazioni in cui un trasferimento di energia non corrisponde ad un
aumento di temperatura: ciò accade ogni volta che le caratteristiche fisiche della sostanza mutano: ogni volta, cioè, che
avviene un passaggio di stato. L’energia trasferita necessaria per il cambiamento di fase di una data massa m di una
sostanza pura è uguale a 𝑄𝑄 = ±𝑚𝑚𝑚𝑚, dove L è chiamato calore latente della sostanza e dipende sia dalle proprietà della
sostanza sia dalla natura del cambiamento di fase. Il segno appropriato è scelto in base alle convenzioni sui segni ed in
base alla direzione del flusso di energia. Il calore latente di fusione, in particolare, è l’energia necessaria per rompere
tutti i legami intermolecolari in un chilogrammo di una sostanza, in modo da convertire la fase solida in fase liquida. Il
calore latente di vaporizzazione, invece, è l’energia che si deve fornire ad un chilogrammo di una sostanza per rompere
tutti i legami del liquido per formare un gas. Il secondo è generalmente maggiore del primo, in virtù della differente forza
dei legami in fase solida e liquida.
Nell’approccio macroscopico alla termodinamica, si descrive lo stato di un sistema con grandezze quali pressione,
volume, temperatura ed energia interna, dette appunto variabili di stato. Per ogni condizione del sistema, possiamo
identificare dei particolari valori delle variabili di stato che la identificano univocamente. L’identificazione delle variabili
Dispensa di Fisica Medica
MV
18
di stato richiede, ovviamente, che il sistema sia in equilibrio termico interno (per esempio, che un determinato gas abbia
la stessa pressione e temperatura in tutte le sue parti). Il calore, invece, è una variabile di trasferimento, ovvero è
possibile assegnargli un valore soltanto se si realizza un processo in cui energia viene trasferita attraverso le superfici
che delimitano il sistema.
Nei sistemi termodinamici esiste anche un’altra importante variabile di trasferimento: il lavoro termodinamico. Si
consideri un gas contenuto in un cilindro chiuso da un pistone mobile privo di attrito ed in equilibrio termico. Il gas occupa
il volume V ed esercita una pressione p uniforme sulle pareti del cilindro e sul pistone. Se il gas è compresso quasi staticamente, ovvero così lentamente da permettere al sistema di essere in equilibrio termico in ogni istante (modello
semplificativo), il lavoro compiuto dal pistone sul sistema (se il gas è compresso) o dal sistema sul pistone (se il gas si
espande) sarà uguale a 𝑑𝑑𝑑𝑑 = ±𝑝𝑝 𝑑𝑑𝑑𝑑. Se il volume rimane costante, il lavoro è, ovviamente, zero. Il lavoro totale, quando
𝑉𝑉
il suo volume varia da 𝑉𝑉0 a 𝑉𝑉 sarà uguale a 𝐿𝐿 = ± ∫𝑉𝑉 𝑝𝑝 𝑑𝑑𝑑𝑑 .
0
In generale, in una trasformazione che porti il gas da uno stato iniziale ad uno finale, la pressione non è costante, ma
dipende dalla temperatura e dal volume. Se la pressione ed il volume sono noti in ogni istante della trasformazione, gli
stati del gas possono essere rappresentati in un diagramma PV, un tipo di grafico molto importante in termodinamica
per visualizzare una trasformazione. In tale rappresentazione, la curva (detta cammino fra lo stato iniziale e finale)
sottende un’area pari al lavoro svolto nella trasformazione.
Il primo principio della termodinamica non è che un caso particolare dell’equazione di continuità dell’energia in cui i soli
meccanismi di trasferimento sono il calore ed il lavoro. In simboli, ∆𝐸𝐸𝑖𝑖𝑖𝑖𝑖𝑖 = 𝑄𝑄 − 𝐿𝐿, ovvero la variazione dell’energia
interna di un sistema è uguale alla somma dell’energia trasferita attraverso il contorno del sistema tramite il calore e
dell’energia trasferita tramite il lavoro (compiuto SUL gas, da cui il segno negativo).
Una trasformazione adiabatica è una trasformazione in cui l’energia non entra né esce dal sistema attraverso il calore
(cioè 𝑄𝑄 = 0). Possiamo immaginare, nella situazione del pistone, che le pareti del recipiente e del pistone siano
perfettamente isolanti. Applicando in questo caso il primo principio, otteniamo che ∆𝐸𝐸𝑖𝑖𝑖𝑖𝑖𝑖 = −𝐿𝐿. Un particolare caso di
trasformazione adiabatica è l’espansione libera, in cui non viene compiuto alcun lavoro sul gas. Poiché in questo caso
𝑄𝑄 = 0 e 𝐿𝐿 = 0, anche ∆𝐸𝐸𝑖𝑖𝑖𝑖𝑖𝑖 = 0. L’energia interna iniziale e finale di un gas in un’espansione libera sono uguali.
Pertanto, non ci aspettiamo alcuna differenza di temperatura dallo stato iniziale a quello finale (in realtà si riscontra
sperimentalmente un leggero aumento o una leggera diminuzione della temperatura dovuta alle interazioni fra le
molecole).
Una trasformazione che avviene a pressione costante è detta trasformazione isobara (nell’esempio del pistone,
immaginiamo che esso sia libero di muoversi, ma in equilibrio). In questo caso, il lavoro compiuto sul gas è semplicemente
il prodotto della pressione (costante) per la variazione di volume 𝐿𝐿 = 𝑝𝑝(𝑉𝑉 − 𝑉𝑉0 ). Su un diagramma PV, un’isobara
appare come una linea orizzontale.
Una trasformazione che avviene a volume costante è detta trasformazione isocora (immaginiamo di fermare con un
morsetto il pistone, affinché esso non sia libero di muoversi). In una tale trasformazione, il lavoro è nullo, poiché la
variazione di volume è nulla. Il primo principio è, quindi, espresso da ∆𝐸𝐸𝑖𝑖𝑖𝑖𝑖𝑖 = 𝑄𝑄. Questo ci dice che se si fornisce calore
ad un sistema mantenuto a volume costante, tutta l’energia va ad aumentare l’energia interna e non esce dal sistema
sotto forma di lavoro. Su un diagramma PV, l’isocora appare come una linea verticale.
Una trasformazione che avviene a temperatura costante è detta trasformazione isoterma. Poiché l’energia interna di
un gas perfetto è solo funzione della temperatura, una variazione di temperatura pari a zero rende nulla anche l’energia
interna. Il primo principio diventa, di conseguenza, 𝑄𝑄 = 𝐿𝐿. Quindi, se nel sistema entra dell’energia sotto forma di calore,
ne uscirà una quantità equivalente sotto forma di lavoro, in modo tale che l’energia interna del sistema non cambi. Sul
𝑉𝑉
diagramma PV, un’isoterma appare come una linea curva. Il lavoro compiuto è stato calcolato come 𝐿𝐿 = 𝑛𝑛𝑛𝑛𝑛𝑛 𝑙𝑙𝑙𝑙 � �.
𝑉𝑉0
Dispensa di Fisica Medica
MV
19
Nel caso di una trasformazione ciclica, ovvero una trasformazione che inizia e finisce nello stesso stato, l’energia cinetica
interna deve essere zero (poiché è una variabile di stato e gli stati iniziale e finale coincidono), per cui il primo principio
diventa 𝑄𝑄 = 𝐿𝐿 . Il lavoro compiuto, per ogni ciclo, coincide con l’area racchiusa dal cammino che rappresenta la
trasformazione nel diagramma PV.
Il processo di trasferimento di energia tramite il calore si chiama conduzione termica. Questo processo, su scala atomica,
non è che uno scambio di energia cinetica fra le molecole, in cui le particelle meno energetiche guadagnano energia
urtando con le particelle più energetiche. La velocità della conduzione dipende dalle proprietà della sostanza che viene
riscaldata: in generale, i metalli sono buoni conduttori termici, poiché contengono un grande numero di elettroni
relativamente liberi di muoversi attraverso il metallo, che possono, quindi, trasportare energia da una regione all’altra.
Materiali come amianto, sughero, carta e lana di vetro sono, invece, cattivi conduttori, così come i gas, a causa della
distanza molto grande fra le molecole. La conduzione avviene solo se c’è una differenza di temperatura fra due parti del
mezzo conduttore, che guida il flusso di energia. Considerando una lastra di materiale di spessore ∆𝑥𝑥 e sezione 𝐴𝐴, con le
sue facce opposte a temperature differenti 𝑇𝑇𝑓𝑓 e 𝑇𝑇𝑐𝑐 , dove 𝑇𝑇𝑐𝑐 > 𝑇𝑇𝑓𝑓 , la lastra permette all’energia di trasferirsi dalla regione
ad alta temperatura a quella a bassa temperatura per conduzione termica con velocità (potenza) proporzionale alla
sezione della lastra ed alla differenza di temperatura ed inversamente proporzionale allo spessore. In simboli, la legge
𝑄𝑄
∆𝑇𝑇
𝑑𝑑𝑑𝑑
della conduzione si esprime come 𝑊𝑊 = ∆𝑡𝑡 ∝ 𝐴𝐴 ∆𝑥𝑥 = 𝑘𝑘𝑘𝑘 �𝑑𝑑𝑑𝑑 �, dove k è una costante chiamata conducibilità termica del
𝑑𝑑𝑑𝑑
materiale e � � è noto come gradiente di temperatura (la variazione della temperatura con la posizione). I buoni
𝑑𝑑𝑑𝑑
conduttori hanno, naturalmente, valori elevati di conducibilità termica, mentre i buoni isolanti hanno valori bassi.
L’energia trasferita dal moto di un fluido è un processo detto convezione. Quando il moto è dovuto a differenze di densità,
come avviene per l’aria vicino ad una fiamma, si tratta di convezione naturale. Se la sostanza calda è messa in moto da
un ventilatore o una pompa, il processo è detto convezione forzata.
Un altro meccanismo di trasferimento di energia che può essere correlato con una variazione di temperatura è la
radiazione elettromagnetica. Tutti gli oggetti irradiano continuamente energia sotto forma di onde elettromagnetiche.
La radiazione elettromagnetica è prodotta accelerando cariche elettriche: poiché la temperatura corrisponde al moto
casuale delle molecole, che cambiano costantemente direzione, e quindi accelerano, e le molecole contengono cariche
elettriche, qualsiasi oggetto emette radiazione elettromagnetica dovuta al moto termico delle sue molecole. Questa
radiazione si chiama radiazione termica. La rapidità alla quale un oggetto emette energia per mezzo della radiazione
termica dalla sua superficie è proporzionale alla quarta potenza delle temperatura assoluta della sua superficie. Questo
principio, noto come legge di Stefan, è espresso in forma di equazione come 𝑃𝑃 = 𝜎𝜎𝜎𝜎𝜎𝜎𝑇𝑇 4 , dove 𝜎𝜎 è la costante di StefanBoltzmann (uguale a 5.669 × 10−8 𝑊𝑊⁄𝑚𝑚2 ∙ 𝐾𝐾 4), 𝐴𝐴 è l’area della superficie dell’oggetto (in 𝑚𝑚2 ), 𝑒𝑒 è una costante detta
emittanza e 𝑇𝑇 è la temperatura assoluta del corpo in kelvin. L’emittanza è uguale alla sua assorbanza, ovvero alla
frazione di radiazione incidente che la sostanza assorbe. Infatti, un oggetto, mentre irradia, assorbe allo stesso tempo
radiazione elettromagnetica dall’ambiente circostante: se ciò non avvenisse, un oggetto potrebbe continuare ad
irradiare la sua energia e la sua temperatura decrescerebbe spontaneamente fino allo zero assoluto. Quando un oggetto
è in equilibrio con l’ambiente, esso irradia ed assorbe energia alla stessa velocità, per cui la sua temperatura resta
costante. Quando, invece, un oggetto è più caldo dell’ambiente, irradia più energia di quanta ne assorba e quindi si
raffredda.
Un dispositivo che risulta utile per capire il secondo principio della termodinamica è la macchina termica. Una macchina
termica è un dispositivo che incamera energia sotto forma di calore e, operando in modo ciclico, espelle una frazione di
quell’energia sotto forma di lavoro. Per esempio, in una centrale elettrica viene bruciato carbone (o qualche altro
combustibile) e l’energia interna risultante viene usata per trasformare l’acqua in vapore. Questo vapore viene
convogliato alle pale di una turbina, ponendola in rotazione. Infine, l’energia meccanica associata a questa rotazione
viene utilizzata per far funzionare un generatore elettrico. In generale, una macchina termica fa compiere ad una qualche
sostanza una trasformazione ciclica durante la quale: (1) la sostanza assorbe energia sotto forma di calore da un
termostato ad alta temperatura, (2) viene compiuto lavoro dalla macchina e (3) viene ceduta energia dalla macchina ad
Dispensa di Fisica Medica
MV
20
un termostato a più bassa temperatura; questa energia in uscita è spesso indicata come energia persa, energia di scarico
o inquinamento termico. La macchina, rappresentata schematicamente, assorbe una quantità di calore 𝑄𝑄𝑐𝑐 dal
termostato caldo. Poi compie il lavoro 𝐿𝐿𝑚𝑚𝑚𝑚𝑚𝑚 e cede l’energia 𝑄𝑄𝑓𝑓 al termostato freddo. Poiché la sostanza compie un ciclo,
la sua energia iniziale e finale è la stessa, per cui ∆𝐸𝐸𝑖𝑖𝑖𝑖𝑖𝑖 = 0. Quindi, dal primo principio, ∆𝐸𝐸𝑖𝑖𝑖𝑖𝑖𝑖 = 𝑄𝑄 − 𝐿𝐿 → 𝑄𝑄𝑡𝑡𝑡𝑡𝑡𝑡 = 𝐿𝐿𝑚𝑚𝑚𝑚𝑚𝑚
e vediamo che il lavoro compiuto dalla macchina è uguale all’energia totale assorbita dalla macchina. Come possiamo
vedere dalla figura, 𝑄𝑄𝑛𝑛𝑛𝑛𝑛𝑛 = |𝑄𝑄𝑐𝑐 | − �𝑄𝑄𝑓𝑓 � → 𝐿𝐿𝑚𝑚𝑚𝑚𝑚𝑚 = |𝑄𝑄𝑐𝑐 | − �𝑄𝑄𝑓𝑓 �. Se la sostanza impiegata è un gas, il lavoro totale svolto
in una trasformazione ciclica è l’area racchiusa dalla curva che rappresenta la trasformazione in un diagramma PV.
Il rendimento 𝜂𝜂 di una macchina termica è definito come il
rapporto fra il lavoro svolto dalla macchina e l’energia assorbita
T
alla temperatura più alta durante un ciclo: 𝜂𝜂 =
�𝑄𝑄 �
|𝑄𝑄𝑐𝑐 |
=
|𝑄𝑄𝑐𝑐 |−�𝑄𝑄𝑓𝑓 �
|𝑄𝑄𝑐𝑐 |
=
= 1 − |𝑄𝑄𝑓𝑓 | . Il rendimento può essere considerato il rapporto fra
𝑐𝑐
𝐿𝐿
𝐿𝐿𝑚𝑚𝑚𝑚𝑚𝑚
ciò che si ottiene e ciò che si spende. Una macchina termica,
quindi, avrebbe un rendimento del 100% (𝜂𝜂 = 1) soltanto se 𝑄𝑄𝑓𝑓 =
0, cioè se non venisse trasferita energia al termostato freddo. In
altre parole, una macchina termica con rendimento unitario
trasformerebbe tutta l’energia assorbita in lavoro meccanico.
L’enunciato di Kelvin-Planck del secondo principio della
termodinamica può esprimersi come segue: “È impossibile
costruire una macchina termica che, operando in un ciclo, abbia
come unico risultato quello di assorbire energia da un termostato e
produrre una uguale quantità di lavoro”. L’essenza di questa forma
dell’enunciato è che è teoricamente impossibile costruire una
macchina che lavori con il 100% di rendimento: tutte le macchine
devono scaricare una parte di energia 𝑄𝑄𝑓𝑓 nell’ambiente.
Una trasformazione è detta reversibile se il sistema può ritornare nelle condizioni iniziali lungo lo stesso percorso nel
quale ogni punto lungo il cammino sia in uno stato di equilibrio. Una trasformazione che non soddisfi tali requisiti è detta,
invece, irreversibile. La maggior parte delle trasformazioni, in natura, sono irreversibili: la trasformazione reversibile è,
in realtà, un’idealizzazione. Se una trasformazione reale avviene molto lentamente, di modo che il sistema sia sempre
molto vicino all’equilibrio, la trasformazione può essere considerata reversibile.
Nel 1824, l’ingegnere francese Sadi Carnot descrisse una macchina, nota oggi come macchina di Carnot, di grande
importanza dal punto di vista sia pratico che teorico. Egli mostrò che una macchina termica che opera fra due termostati
in un ciclo ideale reversibile, detto ciclo di Carnot, è la macchina con il più alto rendimento possibile. Una tale macchina
determina il limite superiore per il rendimento di tutte le macchine. Cioè, il lavoro complessivo svolto da una sostanza
sottoposta ad un ciclo di Carnot è la massima quantità di lavoro possibile per una data quantità di energia fornita alla
sostanza dal termostato a temperatura più alta. Assumiamo che la sostanza sia un gas perfetto contenuto in un cilindro
chiuso da un pistone mobile, con le pareti del cilindro ed il pistone termicamente isolati. Il ciclo consiste di due
trasformazioni adiabatiche e due isoterme, tutte reversibili:
•
•
La trasformazione 𝐴𝐴 → 𝐵𝐵 è una espansione isotermica alla temperatura 𝑇𝑇𝑐𝑐 , nella quale il gas è mantenuto in
contatto termico con un termostato alla temperatura 𝑇𝑇𝑐𝑐 . Durante la trasformazione, il gas assorbe l’energia 𝑄𝑄𝑐𝑐
dal termostato e compie il lavoro 𝐿𝐿𝐴𝐴𝐴𝐴 sollevando il pistone.
Nella trasformazione 𝐵𝐵 → 𝐶𝐶 , la base del cilindro viene isolata termicamente ed il gas si espande
adiabaticamente, cioè senza che avvenga alcuno scambio di energia sotto forma di calore. Durante la
Dispensa di Fisica Medica
MV
21
•
•
trasformazione, la temperatura si abbassa dal valore 𝑇𝑇𝑐𝑐 al valore 𝑇𝑇𝑓𝑓 ed il gas compie il lavoro 𝐿𝐿𝐵𝐵𝐵𝐵 sollevando il
pistone.
Nella trasformazione 𝐶𝐶 → 𝐷𝐷 , il gas è posto in contatto termico con il termostato a temperatura 𝑇𝑇𝑓𝑓 ed è
compresso isotermicamente alla temperatura 𝑇𝑇𝑓𝑓 . Durante questo tempo, il gas cede la quantità di energia 𝑄𝑄𝑓𝑓
al termostato e viene compiuto sul gas il lavoro 𝐿𝐿𝐶𝐶𝐶𝐶 .
Nella trasformazione finale, 𝐷𝐷 → 𝐴𝐴 , la base del cilindro viene di nuovo isolata termicamente ed il gas è
compresso adiabaticamente. La temperatura del gas aumenta al valore 𝑇𝑇𝑐𝑐 ed il lavoro svolto sul gas è 𝐿𝐿𝐷𝐷𝐷𝐷 .
�𝑄𝑄𝑓𝑓 �
Carnot ha dimostrato che per questo ciclo |𝑄𝑄 | =
𝑐𝑐
𝑇𝑇𝑓𝑓
𝑇𝑇𝑐𝑐
, poiché c’è scambio di calore soltanto nelle due isoterme; quindi, il
rendimento di una macchina di Carnot è uguale a 𝜂𝜂𝐶𝐶𝐶𝐶𝐶𝐶𝐶𝐶𝐶𝐶𝐶𝐶 = 1 −
𝑇𝑇𝑓𝑓
𝑇𝑇𝑐𝑐
; da questo risultato si ricava che tutte le macchine
di Carnot che operano fra le stesse temperature hanno lo stesso rendimento.
Se desideriamo raffreddare una pizza ponendola su un blocco di ghiaccio, la cosa certamente funzionerà, poiché, in ogni
caso, l’energia fluisce spontaneamente dal corpo caldo a quello freddo. Eppure, nulla nel primo principio della
termodinamica dice che quest’energia non possa trasferirsi in senso contrario. La direzione del fenomeno è stabilita dal
secondo principio. Le trasformazioni reali evolvono, infatti, lungo una direzione preferenziale. L’enunciato di Clausius
del secondo principio della termodinamica, che si può dimostrare essere equivalente all’enunciato di Kelvin-Planck,
recita che “il calore non fluisce spontaneamente da un oggetto freddo ad un oggetto caldo”. Si può anche dimostrare
che se è falso uno dei due enunciati, lo è anche l’altro.
Un’altra funzione di stato può essere usata per descrivere lo stato termodinamico di un sistema: l’entropia. L’equazione
che descrive la macchina di Carnot può essere riscritta come
�𝑄𝑄𝑓𝑓 �
𝑇𝑇𝑓𝑓
=
|𝑄𝑄𝑐𝑐 |
𝑇𝑇𝑐𝑐
; quindi, il rapporto fra l’energia trasferita in un
ciclo di Carnot e la temperatura (costante) alla quale avviene il trasferimento ha lo stesso valore in entrambe le
trasformazioni isoterme. Generalizzando, lasciamo cadere la nozione di valore assoluto ed esprimiamo l’equazione come
−
𝑄𝑄𝑓𝑓
𝑇𝑇𝑓𝑓
=
𝑄𝑄𝑐𝑐
𝑇𝑇𝑐𝑐
(poiché 𝑄𝑄𝑓𝑓 è l’energia che esce dal sistema mentre 𝑄𝑄𝑐𝑐 è quella che vi entra. Questa può, a sua volta, essere
riscritta come
𝑄𝑄𝑐𝑐
𝑇𝑇𝑐𝑐
𝑄𝑄
𝑄𝑄
+ 𝑇𝑇𝑓𝑓 = 0 → ∑ = 0 . Ciò suggerisce che il rapporto 𝑄𝑄 ⁄𝑇𝑇 possa avere un significato particolare.
𝑓𝑓
𝑇𝑇
Considerando una trasformazione infinitesima fra due stati di equilibrio di un sistema, se 𝑑𝑑𝑑𝑑 è l’energia trasferita tramite
il calore quando il sistema segue un cammino reversibile fra gli stati, la variazione di entropia, indipendentemente dal
reale cammino seguito, è uguale a questa energia trasferita tramite il calore lungo il cammino reversibile diviso per la
temperatura assoluta del sistema. In simboli, 𝑑𝑑𝑑𝑑 =
𝑑𝑑𝑑𝑑
𝑇𝑇
. Da notare che questa equazione non definisce l’entropia, bensì
la sua variazione, che è la quantità significativa nella descrizione di una trasformazione.
I sistemi isolati tendono al disordine e l’entropia è una misura di questo disordine. Per capire questo concetto, possiamo
introdurre la distinzione fra microstati e macrostati di un sistema, attraverso un paragone con il lancio di dadi. Per due
dadi, un microstato è la particolare combinazione di numeri sulle facce superiori (es. 1-3, 2-4); il macrostato, invece, è la
somma dei numeri (nei due casi precedenti, 4 e 6). Il numero di microstati associati con un determinato macrostato non
è lo stesso per tutti i macrostati, cosicché il macrostato che ha il maggior numero di microstati possibili è il macrostato
più probabile. Macrostati altamente probabili (es. ai dadi, 7, che ha ben 6 possibili microstati) sono macrostati
disordinati, mentre macrostati di bassa probabilità (es. 2, che ha un solo microstato) sono macrostati ordinati. Quindi,
possiamo dire che tutte le trasformazioni fisiche tendono verso stati più probabili per il sistema e per il suo ambiente
circostante e che lo stato più probabile è sempre quello con un grado di disordine più alto. Tutto ciò si riflette nella
formula per l’entropia a livello microscopico trovata da Boltzmann: 𝑆𝑆 = 𝑘𝑘𝐵𝐵 𝑙𝑙𝑙𝑙 𝑊𝑊, dove W è il numero di microstati
associati ad un macrostato la cui entropia è S (e 𝑘𝑘𝐵𝐵 è la costante di Boltzmann).
Poiché l’entropia è una misura del disordine e i sistemi fisici tendono verso macrostati disordinati, possiamo affermare
che “l’entropia dell’Universo aumenta in tutte le trasformazioni naturali”. Questo è un altro enunciato del secondo
principio della termodinamica (il cosiddetto enunciato entropico), spiegabile attraverso una semplice considerazione:
Dispensa di Fisica Medica
MV
22
nel caso di trasformazioni irreversibili, l’entropia totale di un sistema isolato aumenta; nel caso di una trasformazione
reversibile, l’entropia totale di un sistema isolato rimane costante: essa non può, quindi, in alcun caso, diminuire. Per
calcolare la variazione di entropia per una trasformazione finita, dobbiamo tenere presente che T generalmente non è
costante. Se dQ è l’energia trasferita reversibilmente tramite il calore quando il sistema si trova a temperatura T, allora
𝑓𝑓
la variazione di entropia in una trasformazione arbitraria reversibile fra uno stato iniziale ed uno finale è ∆𝑆𝑆 = ∫𝑖𝑖 𝑑𝑑𝑑𝑑 =
𝑓𝑓 𝑑𝑑𝑑𝑑
∫𝑖𝑖
𝑇𝑇
. La variazione di entropia di un sistema dipende solo dalle proprietà degli stati iniziale e finale, poiché l’entropia,
come l’energia interna, è una funzione di stato.
Nel caso di una trasformazione adiabatica, nessuna energia viene trasferita tramite il calore fra il sistema e l’ambiente
circostante, quindi ∆𝑆𝑆 = 0. Tale trasformazione è, per questo motivo, detta anche trasformazione isoentropica. In una
macchina di Carnot che funzioni fra le temperature 𝑇𝑇𝑐𝑐 e 𝑇𝑇𝑓𝑓 , ∆𝑆𝑆 = 0 all’interno di un ciclo.
Forze Elettriche e Campi Elettrici
Un certo numero di semplici esperimenti dimostrano l’esistenza delle cariche elettriche. Gli esperimenti dimostrano pure
che esistono due differenti specie di cariche elettriche, chiamate da Benjamin Franklin positiva e negativa. Cariche dello
stesso segno si respingono, mentre cariche di segno opposto si attraggono. Un’altra importante caratteristica della
carica elettrica è che la carica netta in un sistema isolato si conserva sempre. Esiste anche un principio di conservazione
della carica elettrica per un sistema isolato: quando due oggetti inizialmente neutri vengono caricati strofinandoli
insieme, nel processo non vengono create cariche, ma gli oggetti divengono carichi in quanto elettroni vengono trasferiti
da un corpo all’altro: un oggetto guadagna una certa quantità di carica negativa, mentre l’altro perde la stessa quantità
di carica negativa e quindi rimane con una carica positiva. Un’altra proprietà della carica elettrica è la seguente: la carica
elettrica posseduta da un oggetto è dovuta ad un eccesso di elettroni oppure ad una mancanza di elettroni, per questo
motivo la carica elettrica complessiva di un oggetto è quantizzata in multipli della carica elementare dell’elettrone 𝑒𝑒 =
1.60 × 10−19𝐶𝐶.
È possibile per una carica elettrica muoversi da un posto all’altro all’interno di un oggetto: tale moto delle cariche si
chiama conduzione elettrica. È conveniente classificare i materiali secondo la capacità delle cariche di muoversi al loro
interno: conduttori sono i materiali in cui le cariche si muovono relativamente libere ed isolanti sono i materiali in cui le
cariche elettriche non si muovono liberamente. Quando un isolante (es. vetro, bachelite, leucite) è caricato per strofinio,
soltanto l’area strofinata si carica e la carica non si muove verso altre zone del materiale. Quando, invece, carichiamo,
anche in una zona piccolissima, un conduttore (es. rame, alluminio, argento), la carica si distribuisce rapidamente
sull’intera superficie del materiale. Una terza classe di materiali sono i semiconduttori, con proprietà elettriche a metà
fra quelle dei conduttori e quelle degli isolanti: le cariche possono muoversi in un semiconduttore (es. silicio, germanio)
piuttosto liberamente, ma vi sono molte meno cariche in un semiconduttore che in un conduttore.
Quando un conduttore è collegato alla Terra per mezzo di un filo conduttore, si dice che esso è messo a terra; la Terra
può, quindi, essere considerata un serbatoio infinito per gli elettroni, nel senso che può ricevere o fornire un numero
illimitato di elettroni: in elettrostatica la Terra si comporta in modo analogo a come i termostati si comportano in
termodinamica. Tenendo presente ciò, possiamo comprendere come un conduttore possa essere caricato mediante il
procedimento noto come carica per induzione. La carica di un oggetto per induzione non richiede alcun contatto con
l’oggetto che induce la carica, diversamente dalla carica per strofinio.
Un processo simile al fenomeno dell’induzione avviene negli isolanti: nella maggior parte degli atomi e delle molecole
neutre, la posizione media della carica positiva coincide con la posizione media della carica negativa. Tuttavia, in
presenza di un oggetto carico, queste posizioni possono spostarsi leggermente, a causa delle forze attrattive e repulsive
dovute all’oggetto carico. Questo fenomeno è chiamato polarizzazione.
Dispensa di Fisica Medica
MV
23
Le forze elettriche fra oggetti carichi furono misurate quantitativamente da Charles Coulomb, che confermò che la forza
elettrica fra due piccole sfere cariche è proporzionale al reciproco del quadrato della loro distanza. La legge di Coulomb,
in simboli, afferma che 𝐹𝐹𝑒𝑒 = 𝑘𝑘𝑒𝑒
|𝑞𝑞1 ||𝑞𝑞2 |
𝑟𝑟 2
, dove 𝑞𝑞1 e 𝑞𝑞2 indicano due cariche puntiformi separate da una distanza r e 𝑘𝑘𝑒𝑒 è la
costante di Coulomb, uguale a 8.99 × 109 𝑁𝑁 ∙ 𝑚𝑚2 ⁄𝐶𝐶 2 , che si può anche scrivere come
1
4𝜋𝜋𝜀𝜀0
, dove 𝜀𝜀0 è la costante
dielettrica del vuoto, che ha il valore di 8.8542 × 10−12 𝐶𝐶 2 ⁄𝑁𝑁 ∙ 𝑚𝑚2 . Questa equazione fornisce soltanto il modulo della
forza, mentre la direzione ed il verso si devono trovare considerando dove si trovano le particelle ed il loro segno. La
legge di Coulomb è valida esattamente solo per cariche puntiformi o particelle (o per oggetti estesi purché si possano
assimilare a punti materiali).
���⃗𝑔𝑔 agente su una massa
Il campo gravitazionale 𝑔𝑔⃗ in un punto dello spazio è stato definito come la forza gravitazionale 𝐹𝐹
di prova 𝑚𝑚0 diviso per la massa di prova. Analogamente, un campo elettrico in un punto dello spazio può essere definito
in funzione della forza elettrica agente su una carica di prova 𝑞𝑞0 posta in quel punto. Poiché la carica può avere due
diversi segni, dobbiamo scegliere una convenzione per la nostra particella di prova. Scegliamo per convenzione che una
particella di prova trasporta sempre una carica elettrica positiva. Il campo elettrico 𝐸𝐸�⃗ in un punto dello spazio è definito
come la forza elettrica 𝐹𝐹⃗𝑒𝑒 agente su una carica di prova posta in quel punto diviso per la carica 𝑞𝑞0 della particella di
prova. In simboli, 𝐸𝐸�⃗ ≡
𝐹𝐹⃗𝑒𝑒
𝑞𝑞0
. Quindi, un campo elettrico esiste in un punto se una particella carica di prova posta a riposo in
quel punto subisce una forza elettrica. Poiché la forza è un vettore, anche il campo elettrico lo è. Si noti che il campo
elettrico è prodotto da una carica (o più) diversa dalla particella di prova, detta sorgente (così come il campo
gravitazionale non è prodotto dalla carica di prova, ma da un oggetto massivo, come la Terra). Pertanto, il campo
elettrico esiste indipendentemente che si introduca o no una carica di prova nel campo, che viene usata solo per misurare
l’intensità e rivelare l’esistenza del campo. Dobbiamo, quindi, assumere che la carica di prova sia sufficientemente
piccola da non perturbare la distribuzione di carica responsabile del campo. Il vettore 𝐸𝐸�⃗ ha le unità SI di newton su
coulomb (𝑁𝑁⁄𝐶𝐶) e direzione orientata identica a quella di 𝐹𝐹⃗𝑒𝑒 (poiché abbiamo detto che, per convenzione, la carica di
prova ha carica positiva).
Una volta noto il campo elettrico in un punto dello spazio, la forza su qualsiasi particella con carica q posta in quel punto
si può calcolare a partire dalla formula 𝐹𝐹⃗𝑒𝑒 = 𝑞𝑞𝐸𝐸�⃗. Il campo elettrico totale in un dato punto dello spazio, generato da un
insieme di particelle cariche, è uguale alla somma vettoriale dei campi elettrici in quel punto generati da tutte le
particelle. Questo principio di sovrapposizione deriva direttamente dalla proprietà di sovrapposizione delle forze
elettriche.
In molti casi pratici, la distanza media di separazione fra le cariche è piccola rispetto a quella dal punto in cui si vuole
calcolare il campo; in questi casi, il sistema di cariche può essere considerato continuo, cioè si immagina che il sistema
di cariche molto vicine sia equivalente ad una carica totale distribuita con continuità in un dato volume o su una data
superficie. Per calcolare il campo elettrico in una distribuzione continua di carica si opera come segue: si divide la
distribuzione di carica in piccoli elementi ∆𝑞𝑞, assunti puntiformi; poi, si calcola il campo elettrico ∆𝐸𝐸�⃗ nel punto P dovuto
ad uno di questi elementi; infine, si calcola il campo elettrico totale in P, sommando vettorialmente i contributi di tutti
gli elementi di carica (ossia applicando il principio di sovrapposizione). In formula, un generico campo elettrico di un
∆𝑞𝑞
elemento ∆𝑞𝑞 è dato da ∆𝐸𝐸�⃗𝑖𝑖 = 𝑘𝑘𝑒𝑒 2𝑖𝑖 𝑟𝑟̂𝑖𝑖 , dove l’indice i si riferisce all’i-esimo elemento della distribuzione, 𝑟𝑟𝑖𝑖 è la distanza
𝑟𝑟𝑖𝑖
dell’elemento dal punto P ed 𝑟𝑟̂𝑖𝑖 è il versore diretto dall’elemento di carica verso P. il campo elettrico totale nel punto P è,
∆𝑞𝑞
quindi, uguale a 𝐸𝐸�⃗ ≈ 𝑘𝑘𝑒𝑒 ∑𝑖𝑖 𝑟𝑟 2𝑖𝑖 𝑟𝑟̂𝑖𝑖 . Considerando gli elementi di carica infinitesimi, il campo elettrico nel punto P, nel limite
𝑖𝑖
∆𝑞𝑞𝑖𝑖 → 0, diventa 𝐸𝐸�⃗ = 𝑙𝑙𝑙𝑙𝑙𝑙 𝑘𝑘𝑒𝑒 ∑𝑖𝑖
∆𝑞𝑞𝑖𝑖 →0
∆𝑞𝑞𝑖𝑖
𝑟𝑟̂
𝑟𝑟𝑖𝑖 2 𝑖𝑖
a tutta la carica che crea il campo.
= 𝑘𝑘𝑒𝑒 ∫
𝑑𝑑𝑑𝑑
𝑟𝑟 2
𝑟𝑟̂ , dove dq è una quantità infinitesima di carica e l’integrazione è estesa
Più semplicemente, è conveniente utilizzare il concetto di densità di carica; se una carica Q è uniformemente distribuita
𝑄𝑄
in un volume V, la carica per unità di volume ρ è definita da 𝜌𝜌 ≡ 𝑉𝑉 ; se Q è uniformemente distribuita su una superficie
Dispensa di Fisica Medica
MV
24
𝑄𝑄
di area A, la densità superficiale di carica σ è definita come 𝜎𝜎 ≡ ; se, infine, Q è uniformemente distribuita lungo una
𝐴𝐴
𝑄𝑄
linea di lunghezza ℓ, la densità lineare di carica λ è definita come 𝜆𝜆 ≡ .
ℓ
Una rappresentazione grafica conveniente consiste nel tracciare delle linee che hanno in ogni punto la direzione
orientata del campo elettrico; queste linee, chiamate linee di campo, sono legate al campo elettrico in qualunque
regione dello spazio nel seguente modo: il vettore campo elettrico 𝐸𝐸�⃗ è tangente alle linee di forza in ogni punto ed il
numero di linee di forza per unità di area che attraversano una superficie perpendicolare alle linee stesse è proporzionale
all’intensità del campo elettrico in quella regione. Quindi, E è intenso dove le linee sono fitte, è debole dove si diradano.
Le linee di forza che rappresentano il campo di forza generato da una carica puntiforme positiva sono dirette dalla carica
in tutte le direzioni: nella raffigurazione, si mostrano solo quelle che giacciono nel piano che contiene la carica, ma nella
realtà dovrebbero essere come gli aculei di un porcospino. Nel campo elettrico generato da una carica puntiforme
negativa, invece, le linee di campo hanno la stessa direzione, ma sono “entranti”, cioè rivolte verso la carica. Le linee di
campo nel caso di due cariche puntiformi uguali, ma di segno opposto (dipolo elettrico) sono uscenti dalla carica positiva
ed entranti in quella negativa; in questo caso, il numero di linee di forza che hanno origine dalla prima deve eguagliare
il numero di quelle che terminano sulla seconda; lo spazio compreso fra le due cariche ha un’alta densità di linee di
campo, il che indica una regione in cui il campo elettrico è intenso. Nel caso di due cariche puntiformi positive ed uguali,
le cariche sono quasi radiali nelle vicinanze delle due cariche, tuttavia la natura repulsiva della forza elettrica fra le due
particelle fa sì che le linee di forza siano tutte dirette verso l’esterno: nessuna linea di campo collega le particelle, benché
il numero di linee di campo che esce dalla prima sia uguale a quello che esce dalla seconda, e nello spazio compreso fra
le due cariche le linee di campo si incurvano. A grande distanza, il campo è approssimativamente uguale a quello
generato da una singola carica puntiforme positiva.
Quando una particella di carica q e massa m è posta in un campo elettrico 𝐸𝐸�⃗, la forza elettrica che agisce sulla carica è
data da 𝐹𝐹⃗𝑒𝑒 = 𝑞𝑞𝐸𝐸�⃗; se questa è l’unica forza agente sulla particella, essa è la forza risultante, che causa l’accelerazione
della particella. Applicando la legge di Newton, otteniamo che 𝐹𝐹⃗𝑒𝑒 = 𝑞𝑞𝐸𝐸�⃗ = 𝑚𝑚𝑎𝑎⃗. L’accelerazione della particella è, quindi,
data da 𝑎𝑎⃗ =
𝑞𝑞𝐸𝐸�⃗
𝑚𝑚
. Se 𝐸𝐸�⃗ è uniforme, l’accelerazione è costante; se la particella ha carica positiva, la sua accelerazione sarà
nel verso del campo elettrico; se la particella ha carica negativa, la sua accelerazione sarà nel verso opposto. Il campo
elettrico può dirsi uniforme nello spazio racchiuso fra due piastre metalliche cariche di segno opposto; supponiamo che
un elettrone di carica –e venga sparato orizzontalmente in questo campo con una velocità iniziale
𝑣𝑣𝑖𝑖 𝚤𝚤̂ : poiché il campo elettrico è nel verso positivo di y, l’accelerazione
𝑒𝑒𝑒𝑒
dell’elettrone sarà nel verso negativo di y, ovvero, in simboli, 𝑎𝑎⃗ = − 𝑚𝑚 𝚥𝚥̂. Poiché
𝑒𝑒
l’accelerazione è costante, possiamo applicare le equazioni della cinematica:
𝑣𝑣𝑦𝑦 = 𝑎𝑎𝑦𝑦 𝑡𝑡 = −
𝑒𝑒𝑒𝑒
𝑚𝑚𝑒𝑒
𝑡𝑡
,
1
𝑥𝑥 = 𝑣𝑣0 𝑡𝑡 e 𝑦𝑦 = 𝑎𝑎𝑦𝑦 𝑡𝑡 2 = −
2
1 𝑒𝑒𝑒𝑒
2 𝑚𝑚𝑒𝑒
𝑡𝑡 2 . Sostituendo il valore 𝑡𝑡 = 𝑥𝑥 ⁄𝑣𝑣0, vediamo che
y è proporzionale ad 𝑥𝑥 2 , quindi la
traiettoria è una parabola. Inoltre, dopo aver abbandonato il campo
elettrico, l’elettrone continua a muoversi di moto rettilineo, seguendo la prima legge di Newton. È
da notare che abbiamo trascurato la forza gravitazionale, poiché per un tipico campo elettrico di
4 ⁄
10 𝑁𝑁 𝐶𝐶, il rapporto fra il modulo della forza elettrica eE ed il modulo della forza gravitazionale mg, per l’elettrone è
nell’ordine di 1014 e per un protone di 1011 .
Introduciamo ora un nuovo concetto, quello di flusso elettrico, una grandezza proporzionale al numero di linee di campo
che attraversano una determinata superficie. Consideriamo un campo elettrico uniforme (in modulo ed in direzione e
verso) E, le cui linee di campo attraversino una superficie rettangolare di area A, perpendicolare al campo. In questo
caso, il numero di linee di campo è proporzionale al prodotto dell’intensità del campo elettrico per la superficie, chiamato
appunto flusso elettrico 𝛷𝛷𝐸𝐸 . In simboli, 𝛷𝛷𝐸𝐸 = 𝐸𝐸𝐸𝐸. L’unità di misura del flusso, è, quindi, 𝑁𝑁 ∙ 𝑚𝑚2 ⁄𝐶𝐶 . Se la superficie
considerata non è perpendicolare al campo, il numero di linee che la attraversano deve essere minore di questo prodotto.
La formula, infatti, diventa 𝛷𝛷𝐸𝐸 = 𝐸𝐸𝐸𝐸 𝑐𝑐𝑐𝑐𝑐𝑐 𝜗𝜗, dove ϑ è l’angolo formato dalla normale alla superficie di area A con la
direzione del campo elettrico uniforme. Da questa formula vediamo come il flusso sia massimo quando la superficie è
Dispensa di Fisica Medica
MV
25
perpendicolare al campo (per cui la normale è parallela al campo: 𝜗𝜗 = 0° → 𝑐𝑐𝑐𝑐𝑐𝑐 𝜗𝜗 = 1), mentre esso è nullo quando la
superficie è parallela al campo (per cui la normale è perpendicolare al campo: 𝜗𝜗 = 0° → 𝑐𝑐𝑐𝑐𝑐𝑐 𝜗𝜗 = 0). Nel caso più
generale, il campo elettrico può variare sia in modulo sia in direzione e verso sulla superficie in questione; quindi,
suddividiamo la superficie in un gran numero di piccoli elementi, ciascuno di area ∆𝐴𝐴 (se l’elemento è sufficientemente
piccolo, la variazione di campo elettrico nell’elemento può essere trascurata). Definiamo, quindi, un vettore ∆𝐴𝐴⃗𝑖𝑖 , il cui
modulo rappresenta l’area dell’i-esimo elemento e la cui direzione è, per definizione, perpendicolare alla superficie: il
flusso elettrico ∆𝛷𝛷𝐸𝐸 è dato da 𝐸𝐸𝑖𝑖 ∆𝐴𝐴𝑖𝑖 𝑐𝑐𝑐𝑐𝑐𝑐 𝜗𝜗𝑖𝑖 = 𝐸𝐸�⃗𝑖𝑖 ∙ ∆𝐴𝐴⃗𝑖𝑖 (usando la definizione di prodotto scalare). Il flusso totale è,
quindi, dato dalla somma di tutti gli elementi. Facendo tendere l’area di ciascun elemento a zero ed il numero degli
elementi ad infinito, la somma è sostituita da un integrale. In formula, 𝛷𝛷𝐸𝐸 ≡ 𝑙𝑙𝑙𝑙𝑙𝑙 ∑ 𝐸𝐸�⃗𝑖𝑖 ∙ ∆𝐴𝐴⃗𝑖𝑖 = ∫𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠 𝐸𝐸�⃗ ∙ 𝑑𝑑𝐴𝐴⃗. Poiché
∆𝐴𝐴𝑖𝑖 →0
ci interessano soltanto superfici chiuse, possiamo riscrivere la formula come 𝛷𝛷𝐸𝐸 = ∮ 𝐸𝐸�⃗ ∙ 𝑑𝑑𝐴𝐴⃗ = ∮ 𝐸𝐸𝑛𝑛 𝑑𝑑𝑑𝑑 , dove 𝐸𝐸𝑛𝑛
rappresenta la componente del campo elettrico normale alla superficie.
Il flusso elettrico totale attraverso una superficie chiusa è in relazione con la carica contenuta all’interno di questa
superficie tramite il teorema di Gauss. Consideriamo una carica puntiforme positiva q posta al centro di una sfera di
raggio r; le linee di campo sono radiali ed hanno verso uscente, per cui sono normali alla superficie in ogni punto. Cioè,
in ogni punto 𝐸𝐸�⃗ è parallelo al vettore ∆𝐴𝐴⃗𝑖𝑖 , che rappresenta l’elemento locale di area ∆𝐴𝐴𝑖𝑖 . Quindi, per tutti i punti della
superficie, 𝐸𝐸�⃗ ∙ ∆𝐴𝐴𝑖𝑖 = 𝐸𝐸𝑛𝑛 ∆𝐴𝐴𝑖𝑖 = 𝐸𝐸∆𝐴𝐴𝑖𝑖 ed il flusso totale è uguale a 𝛷𝛷𝐸𝐸 = ∮ 𝐸𝐸𝑛𝑛 𝑑𝑑𝑑𝑑 = ∮ 𝐸𝐸𝐸𝐸𝐸𝐸 = 𝐸𝐸 ∮ 𝑑𝑑𝑑𝑑 = 𝐸𝐸𝐸𝐸, poiché E è
costante sull’intera superficie. Poiché l’intensità del campo elettrico ovunque sulla superficie della sfera è uguale ad 𝐸𝐸 =
𝑘𝑘 𝑞𝑞
𝑘𝑘𝑒𝑒 𝑞𝑞⁄𝑟𝑟 2 e poiché la superficie di una sfera è uguale ad 𝐴𝐴 = 4𝜋𝜋𝑟𝑟 2, il flusso totale diventa: 𝛷𝛷𝐸𝐸 = 𝐸𝐸𝐸𝐸 = � 𝑟𝑟𝑒𝑒2 � (4𝜋𝜋𝑟𝑟 2 ) =
1
𝑞𝑞
4𝜋𝜋𝑘𝑘𝑒𝑒 𝑞𝑞. Ricordando, poi, che 𝑘𝑘𝑒𝑒 = 4𝜋𝜋𝜀𝜀 , possiamo scrivere questa relazione come 𝛷𝛷𝐸𝐸 = 𝜀𝜀 . Questo risultato ci dice che il
0
0
flusso totale attraverso una superficie sferica è proporzionale alla carica all’interno della superficie, indipendentemente
da r. in effetti, il flusso totale che attraversa una qualunque superficie chiusa (non per forza una sfera) che circonda una
carica puntiforme q è dato da 𝑞𝑞 ⁄𝜀𝜀0 ; inoltre, poiché potremmo scegliere anche una superficie sferica che circonda una
carica che non è posta al centro della sfera, possiamo dedurre che il flusso attraverso la superficie è indipendente dalla
posizione della carica all’interno della superficie. Considerando, invece, una carica posta al di fuori di una superficie
chiusa, poiché il numero di linee di forza che entrano nella superficie è identico al numero di quelle che ne escono, il
flusso elettrico totale che attraversa una superficie chiusa che non circonda alcuna carica è nullo. Dunque, il teorema di
Gauss, che è una generalizzazione della discussione precedente, afferma che il flusso totale attraverso una qualunque
𝑞𝑞
superficie chiusa è dato da 𝛷𝛷𝐸𝐸 = ∮ 𝐸𝐸�⃗ ∙ 𝑑𝑑𝐴𝐴⃗ = 𝑖𝑖𝑖𝑖 , dove 𝑞𝑞𝑖𝑖𝑖𝑖 rappresenta la carica totale interna alla superficie. In linea di
𝜀𝜀0
principio, il teorema di Gauss può essere utilizzato sempre. In pratica, però, la tecnica è utile solo in un limitato numero
di casi in cui vi sia un alto grado di simmetria: in particolare, le superfici per cui il teorema è valido, dette superfici
Gaussiane, prevedono simmetria sferica, cilindrica o piana. Ad ogni modo, la superficie gaussiana è una superficie
matematica e non è necessario che corrisponda ad una superficie fisica.
Potenziale Elettrico e Capacità
Poiché la forza elettrostatica o di Coulomb è conservativa, i fenomeni elettrostatici possono essere convenientemente
descritti in termini di una funzione energia potenziale elettrica, che ci permette a sua volta di definire una quantità, detta
potenziale elettrico, che è una funzione scalare della posizione. In particolare, quando una carica puntiforme 𝑞𝑞0 è
immersa in un campo elettrico 𝐸𝐸�⃗, la forza elettrica agente su di essa è 𝑞𝑞0 𝐸𝐸�⃗. Questa forza è la somma vettoriale delle
singole forze esercitate dalle cariche che generano il campo. Poiché le singole forze, governate dalla legge di Coulomb,
sono conservative, lo è anche la forza 𝑞𝑞0 𝐸𝐸�⃗. Quando, quindi, la carica 𝑞𝑞0 si muove all’interno del campo, sollecitata dalla
forza elettrica all’interno del campo elettrico, il campo compie lavoro sulla carica. Per un infinitesimo spostamento 𝑑𝑑𝑠𝑠⃗,
il lavoro compiuto dal campo elettrico sulla carica è 𝐹𝐹⃗𝑒𝑒 ∙ 𝑑𝑑𝑠𝑠⃗ = 𝑞𝑞0 𝐸𝐸�⃗ ∙ 𝑑𝑑𝑠𝑠⃗. Il lavoro svolto dal campo elettrico sulla particella
carica varia l’energia potenziale del sistema isolato carica-campo di una quantità 𝑑𝑑𝑑𝑑 = −𝑑𝑑𝑑𝑑 = −𝑞𝑞0 𝐸𝐸�⃗ ∙ 𝑑𝑑𝑠𝑠⃗. Per uno
spostamento finito della particella di prova di carica 𝑞𝑞0 fra i punti A e B, la variazione di energia potenziale del sistema
Dispensa di Fisica Medica
MV
26
𝐵𝐵
carica-campo è ∆𝑈𝑈 = 𝑈𝑈𝐵𝐵 − 𝑈𝑈𝐴𝐴 = −𝑞𝑞0 ∫𝐴𝐴 𝐸𝐸�⃗ ∙ 𝑑𝑑𝑠𝑠⃗. Questo integrale non dipende dal cammino seguito per andare da A a
B, poiché la forza 𝑞𝑞0 𝐸𝐸�⃗ è conservativa.
Poiché l’energia potenziale dipende sia dalle cariche che generano il campo sia dalla carica di prova 𝑞𝑞0 , è più conveniente
introdurre una nuova grandezza che sia indipendente dalla carica di prova. Questa grandezza è il potenziale elettrico,
𝑈𝑈
corrispondente all’energia potenziale elettrica per unità di carica di prova. In simboli, 𝑉𝑉 ≡ 𝑞𝑞 . Poiché l’energia potenziale
0
è uno scalare, lo è anche il potenziale. Inoltre, esso non è una proprietà del sistema carica-campo, poiché abbiamo diviso
per la carica, bensì è una proprietà soltanto del campo.
La differenza di potenziale (chiamata anche tensione o voltaggio) ∆𝑉𝑉 = 𝑉𝑉𝐵𝐵 − 𝑉𝑉𝐴𝐴 fra i punti A e B è definita come la
variazione di energia potenziale del sistema carica-campo, quando la carica di prova 𝑞𝑞0 si muove fra i due punti, divisa
per la carica 𝑞𝑞0 della particella di prova. In simboli, ∆𝑉𝑉 =
∆𝑈𝑈
𝑞𝑞0
𝐵𝐵
= − ∫𝐴𝐴 𝐸𝐸�⃗ ∙ 𝑑𝑑𝑠𝑠⃗. È da notare che questa formula definisce
soltanto la differenza di potenziale: la funzione potenziale elettrica è spesso presa uguale a zero in un punto conveniente,
chiamato terra o massa. Abitualmente, fissiamo il potenziale dovuto ad una o più cariche sorgenti uguale a zero in un
punto posto all’infinito. Con questa scelta, diciamo che il potenziale elettrico di un punto arbitrario è uguale al lavoro
per unità di carica necessario per portare una particella di prova dall’infinito al punto, diviso per la carica della particella
𝑃𝑃
di prova. In questo modo, se prendiamo 𝑉𝑉𝐴𝐴 = 0 all’infinito, il potenziale in ogni punto P sarà uguale a 𝑉𝑉𝑃𝑃 = − ∫∞ 𝐸𝐸�⃗ ∙ 𝑑𝑑𝑠𝑠⃗,
essendo 𝑉𝑉𝑃𝑃 , in realtà, la differenza di potenziale fra il punto P ed un punto all’infinito. L’unità di misura del potenziale è
il volt (V), equivalente ad 1𝐽𝐽⁄𝐶𝐶; cioè, se poniamo una particella con carica di 1C in un campo elettrico ed essa si muove
da un punto a potenziale più alto ad uno a potenziale più basso attraverso una differenza di potenziale di 1V, il campo
avrà svolto 1J di lavoro su di essa ed essa raggiungerà un’energia cinetica di 1J. Inoltre, la differenza di potenziale ha
anche le dimensioni del campo elettrico moltiplicato per una distanza; da questo consegue che il campo elettrico, oltre
che in 𝑁𝑁⁄𝐶𝐶, si può anche esprimere come 𝑉𝑉⁄𝑚𝑚, il che suggerisce che il campo elettrico può essere interpretato come la
derivata spaziale del potenziale elettrico. Un intenso campo elettrico corrisponde ad un potenziale che varia rapidamente
nello spazio, mentre un debole campo elettrico rappresenta un potenziale che varia lentamente.
Un’unità d’energia comunemente usata in fisica è l’elettronvolt (eV). 1𝑒𝑒𝑒𝑒 = (1𝑒𝑒)(1𝑉𝑉) = (1.60 × 10−19 𝐶𝐶)(1𝐽𝐽 ⁄𝐶𝐶 ) =
1.60 × 10−19𝐽𝐽. Un eV è l’energia cinetica guadagnata da una particella con carica e accelerata attraverso una differenza
di potenziale di 1V. Nonostante il nome possa trarre in inganno, quindi, l’elettronvolt non è un’unità di potenziale
elettrico, ma di energia potenziale.
In un campo elettrico uniforme, diretto lungo l’asse y negativo, la differenza di potenziale fra due punti A e B separati da
𝐵𝐵
𝐵𝐵
una distanza d, misurata parallelamente alle linee di campo, è uguale a ∆𝑉𝑉 = − ∫ 𝐸𝐸�⃗ ∙ 𝑑𝑑𝑠𝑠⃗ = − ∫ 𝐸𝐸 𝑐𝑐𝑐𝑐𝑐𝑐 0° 𝑑𝑑𝑑𝑑 =
𝐴𝐴
𝐵𝐵
𝐵𝐵
𝐴𝐴
− ∫𝐴𝐴 𝐸𝐸𝐸𝐸𝐸𝐸 . Ma poiché E è costante, può essere portato fuori dal segno di integrale: ∆𝑉𝑉 = −𝐸𝐸 ∫𝐴𝐴 𝑑𝑑𝑑𝑑 = −𝐸𝐸𝐸𝐸, in cui il segno
meno deriva dal fatto che il punto B si trova ad un potenziale minore del punto A: in generale, le linee di campo elettrico
sono sempre dirette nella direzione di un potenziale elettrico decrescente. Supponiamo, ora, che una particella di prova
con carica 𝑞𝑞0 si muova da A a B; la variazione dell’energia potenziale elettrica del sistema carica-campo si può calcolare
come ∆𝑈𝑈 = 𝑞𝑞0 ∆𝑉𝑉 = −𝑞𝑞0 𝐸𝐸𝐸𝐸. Da questo risultato vediamo che se 𝑞𝑞0 è positivo, ∆𝑈𝑈 è negativo. Quindi, quando una carica
positiva si muove nel verso del campo elettrico, l’energia potenziale elettrica del sistema carica-campo diminuisce,
analogamente ad un oggetto che cade da un’altezza d in un campo gravitazionale (uniforme). Inoltre, se una particella
carica positivamente 𝑞𝑞0 è abbandonata in un campo elettrico uniforme 𝐸𝐸�⃗, essa subisce una forza elettrica 𝑞𝑞0 𝐸𝐸�⃗ nella
direzione (e verso) del campo elettrico, guadagnando energia cinetica. Poiché la particella guadagna energia cinetica, il
sistema carica-campo perde una uguale quantità di energia potenziale. Questo risultato è anch’esso analogo al caso
gravitazionale ed è l’affermazione del principio di conservazione dell’energia meccanica nel caso di un sistema isolato
costituito da una carica immersa in un campo elettrico. Viceversa, se 𝑞𝑞0 è negativa, ∆𝑈𝑈 è positiva e, se abbandonata in
quiete nel campo 𝐸𝐸�⃗, essa viene accelerata nel verso opposto a quello del campo elettrico ed il sistema carica-campo
perde energia potenziale elettrica (questo caso non ha un analogo nel campo gravitazionale, poiché la massa è sempre
Dispensa di Fisica Medica
MV
27
positiva). Infine, questi risultati dimostrano che tutti i punti che giacciono in un piano perpendicolare ad un campo
elettrico uniforme si trovano allo stesso potenziale; una qualunque superficie costituita da un insieme di punti allo stesso
potenziale elettrico è detta superficie equipotenziale.
Una carica puntiforme positiva isolata q produce un campo elettrico radiale uscente dalla carica il cui potenziale elettrico
𝑞𝑞
a distanza r è pari a 𝑉𝑉 = 𝑘𝑘𝑒𝑒 . Da ciò si deduce che V è costante su una superficie sferica di raggio r: infatti, le superfici
𝑟𝑟
equipotenziali per una particella puntiforme isolata sono rappresentate da una famiglia di sfere concentriche alla
carica; si noti che esse sono perpendicolari alle linee di campo, come accade per un campo elettrico uniforme. Il
potenziale elettrico generato da una o più cariche puntiformi si ottiene applicando il principio di sovrapposizione: il
potenziale in un punto P dovuto a più cariche puntiformi è la somma (algebrica, non vettoriale) dei potenziali dovuti alle
𝑞𝑞
singole cariche. In formula, 𝑉𝑉 = 𝑘𝑘𝑒𝑒 ∑𝑖𝑖 𝑟𝑟𝑖𝑖 , assumendo il potenziale nullo all’infinito. Se 𝑉𝑉2 è il potenziale dovuto alla carica
𝑖𝑖
𝑞𝑞2 in un punto P, il lavoro necessario per portare una seconda carica 𝑞𝑞1 dall’infinito a P senza accelerazione è dato da
𝑞𝑞1 𝑉𝑉2 . Questo lavoro corrisponde all’energia immagazzinata nel sistema, ovvero all’energia potenziale elettrica di una
coppia di particelle cariche, data da 𝑈𝑈 = 𝑞𝑞1 𝑉𝑉2 = 𝑘𝑘𝑒𝑒
𝑞𝑞1 𝑞𝑞2
𝑟𝑟12
. Si noti che se le cariche sono di segno uguale, U è positiva: ciò
è consistente col fatto che cariche uguali si respingono, e quindi bisogna compiere un lavoro positivo sul sistema per
avvicinarle. Al contrario, se le cariche sono di segno opposto, si attrarranno e l’agente esterno deve compiere un lavoro
negativo per evitare che la carica 𝑞𝑞1 acceleri su 𝑞𝑞2 .
Il potenziale elettrico dovuto ad una distribuzione continua di carica può essere calcolato considerando il potenziale
generato da un piccolo elemento 𝑑𝑑𝑑𝑑 come una carica puntiforme; il potenziale 𝑑𝑑𝑑𝑑 in un certo punto P dovuto a dq è
quindi 𝑑𝑑𝑑𝑑 = 𝑘𝑘𝑒𝑒
𝑑𝑑𝑑𝑑
𝑟𝑟
. Per ottenere il potenziale totale integriamo l’equazione per sommare i contributi di tutti gli elementi
della distribuzione di carica. In formula, 𝑉𝑉 = 𝑘𝑘𝑒𝑒 ∫
𝑑𝑑𝑑𝑑
𝑟𝑟
.
Quando un conduttore in equilibrio elettrostatico è carico, la carica è distribuita sulla superficie esterna del conduttore.
Inoltre, il campo elettrico nelle vicinanze immediate della superficie di un conduttore in equilibrio elettrostatico è
perpendicolare alla superficie, mentre il campo all’interno del conduttore è nullo. Ogni punto sulla superficie di un
conduttore carico, inoltre, si trova allo stesso potenziale, poiché per due punti sulla sua superficie 𝐸𝐸�⃗ è sempre
perpendicolare allo spostamento 𝑑𝑑𝑠𝑠⃗, per cui 𝐸𝐸�⃗ ∙ 𝑑𝑑𝑠𝑠⃗ = 0. Quindi, la differenza di potenziale fra due punti sulla superficie
di un conduttore carico è necessariamente zero. Una tale superficie è, quindi, equipotenziale. Inoltre, poiché il campo
elettrico all’interno è nullo, possiamo concludere che il potenziale all’interno è costante dovunque ed uguale al suo valore
sulla superficie. Quindi, non è necessario compiere lavoro per muovere una carica di prova dall’interno di un conduttore
carico fin sulla superficie.
Un circuito elettrico consiste di un certo numero di componenti elettrici (o elementi circuitali), collegati fra di loro da fili
conduttori, a formare uno o più circuiti chiusi, che si possono considerare come sistemi che mostrano un particolare
comportamento. Uno degli elementi di circuito più importanti è il condensatore. Un condensatore consiste di due
conduttori di forma qualsiasi, con cariche opposte di segno ma uguali di modulo, tra i quali è stabilita una differenza di
potenziale. Il condensatore, dunque, immagazzina cariche (collegando i due conduttori scarichi ai poli di una batteria).
La differenza di potenziale ∆𝑉𝑉 ai capi di un condensatore è il modulo della differenza di potenziale fra i due conduttori,
proporzionale alla carica 𝑄𝑄 del condensatore, definita come la quantità di carica presente su una delle due armature. La
capacità 𝐶𝐶 di un condensatore è definita come il rapporto fra la carica del condensatore ed il valore assoluto della
differenza di potenziale ai capi del condensatore, ovvero è una misura della quantità di carica che può essere
immagazzinata in un dato condensatore, per una certa differenza di potenziale. In simboli, 𝐶𝐶 ≡
𝑄𝑄
∆𝑉𝑉
. Per definizione, la
capacità è una grandezza sempre positiva; inoltre, per un dato condensatore, la quantità 𝑄𝑄 ⁄∆𝑉𝑉 è costante, poiché la
differenza di potenziale è proporzionale alla carica. L’unità di misura della capacità è il farad (𝐹𝐹), equivalente ad 1𝐶𝐶⁄𝑉𝑉,
così chiamato in onore di Michael Faraday. Il farad è un’unità di misura molto grande: nella pratica, i condensatori hanno
capacità nell’ordine del 𝜇𝜇𝜇𝜇 o 𝑝𝑝𝑝𝑝 . La capacità di un condensatore dipende dalle caratteristiche geometriche dei
conduttori. Un condensatore piano, per esempio, costituito da due piastre parallele della stessa area A, separate da una
Dispensa di Fisica Medica
MV
28
distanza D, ha una capacità C che dipende appunto dall’area e dalla distanza, cosa che appare alquanto intuitiva. In
simboli, 𝐶𝐶 =
𝜀𝜀0 𝐴𝐴
𝑑𝑑
. Un condensatore cilindrico, invece, è costituito da un conduttore cilindrico di raggio a e carica Q
contenuto in un altro conduttore cilindrico coassiale di raggio b e carica –Q. La sua capacità è data da 𝐶𝐶 =
ℓ
𝑏𝑏
𝑎𝑎
2𝑘𝑘𝑒𝑒 𝑙𝑙𝑙𝑙� �
, dove
ℓ è la lunghezza del dispositivo. Un esempio di tale condensatore è un cavo coassiale, costituito appunto da due
conduttori cilindrici separati da un isolane. Il cavo è percorso da correnti di verso opposto nei conduttori interno ed
esterno. Questa geometria viene usata allo scopo di schermare il segnale elettrico da influenze esterne.
Nei circuiti elettrici, due o più condensatori possono essere collegati in vari modi ed è possibile calcolare la capacità
equivalente di queste combinazioni. Due condensatori possono essere collegati in parallelo secondo questo
procedimento: le armature di sinistra di entrambi i condensatori sono collegate mediante un filo conduttore al polo
positivo di una batteria e sono, quindi, al suo stesso potenziale. Analogamente, le armature di destra sono collegate al
polo negativo della batteria e sono quindi al suo stesso potenziale. La tensione applicata ai capi della combinazione e la
tensione applicata ai capi di ciascun condensatore sono, quindi, la stessa tensione dei morsetti della batteria. Le
armature di sinistra diventano, quindi, cariche positivamente, mentre quelle di destra si caricano negativamente.
Quando la tensione ai capi è uguale a quella ai terminali della batteria, il flusso di cariche cessa. A questo punto, i
condensatori hanno raggiunto la loro carica massima, che chiamiamo 𝑄𝑄1 e 𝑄𝑄2 . La carica totale immagazzinata nei due
condensatori è, dunque, pari a 𝑄𝑄 = 𝑄𝑄1 + 𝑄𝑄2 . Un condensatore equivalente che abbia una capacità equivalente 𝐶𝐶𝑒𝑒𝑒𝑒 deve
avere sul circuito esattamente lo stesso effetto dei due condensatori in parallelo, cioè deve accumulare una carica Q e
la sua tensione deve essere uguale a ∆𝑉𝑉. Per cui, 𝑄𝑄 = 𝐶𝐶𝑒𝑒𝑒𝑒 ∆𝑉𝑉 e, per i singoli condensatori, 𝑄𝑄1 = 𝐶𝐶1 ∆𝑉𝑉 e 𝑄𝑄2 = 𝐶𝐶2 ∆𝑉𝑉.
Sostituendo queste relazioni, si ottiene che 𝐶𝐶𝑒𝑒𝑒𝑒 ∆𝑉𝑉 = 𝐶𝐶1 ∆𝑉𝑉 + 𝐶𝐶2 ∆𝑉𝑉, ossia, per due (o più) condensatori collegati in
parallelo, la capacità equivalente è pari alla somma algebrica delle singole capacità ed è maggiore di quella di ciascuno
dei singoli condensatori. In simboli, 𝐶𝐶𝑒𝑒𝑒𝑒 = 𝐶𝐶1 + 𝐶𝐶2 + 𝐶𝐶3 + ⋯.
Due condensatori possono anche essere collegati in serie. In questo caso, il valore assoluto della carica è lo stesso su
tutte le armature. Infatti, subito dopo l’inserimento della batteria nel circuito, l’armatura di destra di 𝐶𝐶1 e quella di
sinistra di 𝐶𝐶2 formano un conduttore isolato, per cui qualsiasi carica negativa entri in un’armatura dal filo di
collegamento deve essere uguale alla carica positiva dell’altra armatura, per mantenere la neutralità del conduttore
isolato: ciò è l’equivalente del modello del sistema isolato per la carica elettrica. La capacità di un conduttore equivalente,
che svolga la stessa funzione del collegamento in serie, quindi, deve consentire una carica −𝑄𝑄 sull’armatura destra ed
una +𝑄𝑄 su quella sinistra. In formula, ∆𝑉𝑉 =
𝑄𝑄
𝐶𝐶𝑒𝑒𝑒𝑒
. Poiché l’armatura di destra di 𝐶𝐶1 e l’armatura di sinistra di 𝐶𝐶2 formano
un conduttore isolato, ambedue le armature si trovano allo stesso potenziale 𝑉𝑉𝑖𝑖 . Chiamando il potenziale dell’armatura
sinistra di 𝐶𝐶1 𝑉𝑉𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠 e quello dell’armatura destra di 𝐶𝐶2 𝑉𝑉𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑎𝑎 , la differenza di potenziale tra di loro, poiché esse sono
collegate direttamente alla batteria, deve essere uguale a ∆𝑉𝑉 = 𝑉𝑉𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠 − 𝑉𝑉𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑 . Se sommiamo e sottraiamo 𝑉𝑉𝑖𝑖 a
questa equazione, otteniamo ∆𝑉𝑉 = (𝑉𝑉𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠 − 𝑉𝑉𝑖𝑖 ) + (𝑉𝑉𝑖𝑖 − 𝑉𝑉𝑑𝑑𝑒𝑒𝑒𝑒𝑒𝑒𝑒𝑒𝑒𝑒 ) = ∆𝑉𝑉𝑖𝑖 + ∆𝑉𝑉2 , dove ∆𝑉𝑉1 e ∆𝑉𝑉2 sono le differenze di
potenziale ai capi dei condensatori 𝐶𝐶1 e 𝐶𝐶2 . In generale, la differenza di potenziale ai capi di un qualsiasi numero di
condensatori in serie è uguale alla somma delle differenze di potenziale ai capi dei singoli condensatori. Poiché la
relazione 𝑄𝑄 = 𝐶𝐶∆𝑉𝑉 può essere applicata a ciascun condensatore, la differenza di potenziale ai capi di ognuno di essi è
data da ∆𝑉𝑉1 =
𝑄𝑄
𝐶𝐶1
e ∆𝑉𝑉2 =
𝑄𝑄
. Eliminando ∆𝑉𝑉 e semplificando Q, otteniamo la relazione secondo cui il reciproco della
𝐶𝐶2
capacità equivalente è la somma algebrica delle singole capacità e, quindi, la capacità equivalente di un collegamento
1
1
1
1
in serie è sempre minore delle capacità dei singoli condensatori. In simboli, 𝐶𝐶 = 𝐶𝐶 + 𝐶𝐶 + 𝐶𝐶 + ⋯.
𝑒𝑒𝑒𝑒
1
2
3
In tutti i contesti in cui fluisce una carica, si dice che vi è una corrente. Supponendo che le cariche si muovano
perpendicolarmente ad una superficie di area 𝐴𝐴 (per esempio, la sezione trasversale di un filo), la corrente elettrica è
definita come la rapidità con cui la carica elettrica fluisce attraverso questa superficie. In simboli, 𝑖𝑖𝑚𝑚𝑚𝑚𝑚𝑚 =
∆𝑄𝑄
∆𝑡𝑡
. Se la
rapidità varia nel tempo, la corrente istantanea è il limite per ∆𝑡𝑡 tendente a zero dell’espressione precedente. In simboli,
𝑖𝑖 ≡ 𝑙𝑙𝑙𝑙𝑙𝑙
∆𝑄𝑄
∆𝑡𝑡→0 ∆𝑡𝑡
=
𝑑𝑑𝑑𝑑
𝑑𝑑𝑑𝑑
. L’unità di corrente nel SI è l’ampere (𝐴𝐴), equivalente ad 1𝐶𝐶⁄𝑠𝑠 , ossia 1 A di corrente equivale al
Dispensa di Fisica Medica
MV
29
passaggio della carica di 1 C attraverso una superficie in 1 s. Per convenzione, si sceglie come verso positivo della corrente
quello in cui fluisce la carica positiva, indipendentemente dal segno reale della particelle in moto. Per esempio, in un filo
di rame, dove la corrente è dovuta al moto di elettroni, carichi negativamente, il verso della corrente è opposto a quello
del flusso degli elettroni. Viceversa, per un fascio di protoni in un acceleratore di particelle, la corrente ha lo stesso verso
del moto dei protoni.
Per un campo elettrico uniforme in un conduttore di sezione uniforme, la differenza di potenziale ai capi del conduttore
è proporzionale al campo elettrico; allora, quando una differenza di potenziale viene applicata agli estremi di un
conduttore metallico, la corrente nel conduttore è proporzionale alla tensione applicata, cioè 𝑖𝑖 ∝ ∆𝑉𝑉. Questa costante
di proporzionalità è la resistenza R del conduttore, definita appunto come il rapporto fra la tensione ai capi del
conduttore e la corrente elettrica che esso trasporta. In simboli, 𝑅𝑅 ≡
∆𝑉𝑉
𝑖𝑖
. L’unità di misura della resistenza è il volt su
ampere, chiamato ohm (𝛺𝛺). Ossia, se la differenza di potenziale di 1 V ai capi di un conduttore determina una corrente
di 1 A, la resistenza del conduttore è di 1 Ω.
Per molti materiali, inclusi la maggior parte dei metalli, gli esperimenti dimostrano che la resistenza è costante su un
grande intervallo di tensioni applicate. Questo comportamento è noto come legge di Ohm, da Georg Simon Ohm, il
primo a condurre uno studio sistematico sulla resistenza elettrica. La legge di Ohm non è una legge fondamentale della
natura, ma una relazione empirica valida soltanto per certi materiali e certi dispositivi e soltanto in un campo limitato di
condizioni. I materiali o dispositivi che obbediscono alla legge di Ohm e presentano, quindi, una resistenza costante in
un grande intervallo di tensioni, si chiamano ohmici. Un resistore è un semplice elemento circuitale che fornisce una
specifica resistenza in un circuito elettrico. La tensione ai capi di un resistore è il prodotto della resistenza e della corrente
nel resistore.
La resistenza di un filo conduttore ohmico è proporzionale alla sua lunghezza ℓ ed inversamente proporzionale alla sua
ℓ
sezione 𝐴𝐴. Cioè, 𝑅𝑅 = 𝜌𝜌 , dove la costante di proporzionalità 𝜌𝜌 è chiamata resistività del materiale ed ha unità ohm per
𝐴𝐴
metro (𝛺𝛺 ∙ 𝑚𝑚). Ogni materiale ohmico ha una specifica resistività, parametro che dipende dalle proprietà del materiale
e dalla temperatura. Il reciproco della resistività è definito conducibilità 𝜎𝜎. Quindi, la resistenza di un conduttore ohmico
ℓ
si può anche esprimere in termini della sua conducibilità come 𝑅𝑅 = 𝜎𝜎𝜎𝜎 . La resistenza di un conduttore è, quindi
direttamente proporzionale alla sua lunghezza ed inversamente proporzionale alla sua sezione, analogamente al flusso
di un liquido attraverso un condotto.
La resistività dipende da numerosi fattori, uno dei quali è la temperatura. Per la maggior parte dei metalli, in un
intervallo limitato di temperature, la resistività varia in maniera approssimativamente lineare, secondo la legge della
variazione della resistività con la temperatura 𝜌𝜌 = 𝜌𝜌0 [1 + 𝛼𝛼(𝑇𝑇 − 𝑇𝑇0 )], dove 𝜌𝜌 è la resistività ad una certa temperatura
T (in gradi Celsius), 𝜌𝜌0 è la resistività ad una temperatura di riferimento 𝑇𝑇0 (ordinariamente 20°𝐶𝐶) ed 𝛼𝛼 è il coefficiente
termico della resistività, che può essere espresso come 𝛼𝛼 =
1 ∆𝜌𝜌
𝜌𝜌0 ∆𝑇𝑇
. Poiché la resistenza è proporzionale alla resistività, la
variazione della resistenza con la temperatura può essere scritta come 𝑅𝑅 = 𝑅𝑅0 [1 + 𝛼𝛼(𝑇𝑇 − 𝑇𝑇0 )]. Esiste una classe di
metalli e composti per cui la resistenza diventa zero al di sotto di una particolare temperatura critica 𝑇𝑇𝑐𝑐 . Essi sono noti
come superconduttori.
Quando una carica passa attraverso un resistore, il sistema perde energia potenziale elettrica. Ovviamente, il sistema
riacquista questa energia quando la carica attraversa la batteria, a spese dell’energia chimica della batteria. La rapidità
con cui il sistema perde energia potenziale quando la carica passa attraverso il resistore è uguale alla rapidità con cui il
sistema guadagna energia interna nel resistore e rappresenta la potenza elettrica 𝑊𝑊 = 𝑖𝑖∆𝑉𝑉. Questa equazione si può
usare per determinare la potenza trasferita da una sorgente di tensione a qualsiasi dispositivo che trasporti una corrente
𝑖𝑖 avente una differenza di potenziale ∆𝑉𝑉 ai suoi capi. Possiamo esprimere la potenza fornita ad un resistore anche come
𝑊𝑊 = 𝑖𝑖 2 𝑅𝑅 =
(∆𝑉𝑉)2
𝑅𝑅
. L’unità di potenza è sempre il Watt (𝑊𝑊); l’unità di energia usata dalle società elettriche per calcolare
il trasferimento di energia è il kilowattora, che è la quantità di energia trasferita in 1 ora alla potenza costante di 1 kW.
Dispensa di Fisica Medica
MV
30
L’entità che mantiene costante la tensione si chiama sorgente di f.e.m. (abbreviazione di forza elettromotrice, termine
scorretto, poiché essa non è una forza, bensì una differenza di potenziale). Le sorgenti di f.e.m. sono costituite da
qualsiasi dispositivo che aumenta l’energia potenziale di un sistema circuitale mantenendo una differenza di potenziale
tra punti del circuito mentre le cariche si muovono lungo il circuito stesso. Si può pensare, quindi, ad una sorgente di
f.e.m. come ad una “pompa di carica”. La f.e.m. di una sorgente esprime il lavoro svolto per unità di carica e, quindi, la
sua unità di misura nel SI è il volt. Ma la differenza di potenziale ai capi di una batteria non è uguale alla f.e.m. della
batteria, poiché una batteria reale contiene sempre una resistenza interna r. Di conseguenza, la tensione ai capi della
batteria è data da ∆𝑉𝑉 = 𝑓𝑓. 𝑒𝑒. 𝑚𝑚. −𝑖𝑖𝑖𝑖; la f.e.m. è, quindi, uguale alla differenza di potenziale a circuito aperto, cioè la
tensione quando la corrente è zero. Si osserva che la tensione ai capi ∆𝑉𝑉 deve essere uguale anche alla differenza di
potenziale ai capi della resistenza esterna 𝑅𝑅, chiamata resistenza di carico; cioè, ∆𝑉𝑉 = 𝑖𝑖𝑖𝑖. Mettendo a sistema questa
e l’equazione precedente, otteniamo la relazione 𝑓𝑓. 𝑒𝑒. 𝑚𝑚. = 𝐼𝐼𝐼𝐼 + 𝐼𝐼𝐼𝐼, da cui si ottiene la seguente relazione per la
corrente: 𝑖𝑖 =
𝑓𝑓.𝑒𝑒.𝑚𝑚.
𝑅𝑅+𝑟𝑟
. Ciò dimostra che la corrente dipende sia dalla resistenza esterna 𝑅𝑅 alla batteria che da quella interna
𝑟𝑟. Si può notare anche che se 𝑅𝑅 è molto più grande di 𝑟𝑟, possiamo adottare un modello semplificato in cui trascuriamo
𝑟𝑟.
Quando due o più resistori sono collegati insieme in modo che abbiano un solo estremo in comune per ogni coppia, si
dice che sono collegati in serie; è importante notare che la carica 𝑄𝑄 che passa nei due resistori è la stessa, poiché la
carica che fluisce attraverso 𝑅𝑅1 deve essere uguale a quella che fluisce attraverso 𝑅𝑅2 . Poiché la stessa quantità di carica
passa attraverso entrambi i resistori in un dato intervallo di tempo, anche la corrente è la stessa in entrambi i resistori.
Quindi, la differenza di potenziale applicata è uguale a ∆𝑉𝑉 = 𝑖𝑖𝑅𝑅1 + 𝑖𝑖𝑅𝑅2 = 𝑖𝑖(𝑅𝑅1 + 𝑅𝑅2 ); la differenza di potenziale è,
quindi, applicata anche alla resistenza equivalente: ∆𝑉𝑉 = 𝑖𝑖𝑅𝑅𝑒𝑒𝑒𝑒 . Mettendo insieme queste equazioni, vediamo che
possiamo sostituire i due resistori in serie con una sola resistenza equivalente il cui valore è la somma delle singole
resistenze: ∆𝑉𝑉 = 𝑖𝑖𝑅𝑅𝑒𝑒𝑒𝑒 = 𝑖𝑖(𝑅𝑅1 + 𝑅𝑅2 ) → 𝑅𝑅𝑒𝑒𝑒𝑒 = 𝑅𝑅1 + 𝑅𝑅2 . La resistenza equivalente di un insieme di resistori collegati in
serie è uguale alla somma algebrica delle singole resistenze ed è sempre maggiore di ciascuna di esse. In simboli, 𝑅𝑅𝑒𝑒𝑒𝑒 =
𝑅𝑅1 + 𝑅𝑅2 + 𝑅𝑅3 + ⋯.
Consideriamo ora due resistori collegati in parallelo: in questo caso, la differenza di potenziale ai capi dei resistori è la
stessa, poiché ciascun resistore è collegato direttamente ai capi della batteria. Invece, la corrente in ciascun resistore è
generalmente diversa. Quando le cariche arrivano al primo nodo, la corrente si divide in due parti, 𝑖𝑖1 che passa attraverso
𝑅𝑅1 ed 𝑖𝑖2 che passa attraverso 𝑅𝑅2 . Se 𝑅𝑅1 è maggiore di 𝑅𝑅2 , 𝑖𝑖1 sarà minore di 𝑖𝑖2 . Naturalmente, per la legge della
conservazione della carica, la corrente 𝑖𝑖 che entra nel nodo deve essere uguale alla corrente totale che ne esce. In simboli,
𝑖𝑖 = 𝑖𝑖1 + 𝑖𝑖2 . Poiché la differenza di potenziale ai capi di ogni resistore deve essere la stessa, dalla legge 𝑖𝑖 = ∆𝑉𝑉⁄𝑅𝑅 si
ottiene: 𝑖𝑖 = 𝑖𝑖1 + 𝑖𝑖2 =
∆𝑉𝑉
𝑅𝑅1
+
∆𝑉𝑉
𝑅𝑅2
= ∆𝑉𝑉 �
1
𝑅𝑅1
+
1
𝑅𝑅2
�=
∆𝑉𝑉
𝑅𝑅𝑒𝑒𝑒𝑒
, dove 𝑅𝑅𝑒𝑒𝑒𝑒 è una singola resistenza equivalente che ha lo stesso
effetto sul circuito; cioè, essa fa sì che vi sia la stessa corrente nella batteria. Da questo risultato si ottiene che il reciproco
della resistenza equivalente di due o più resistori collegati in parallelo è uguale alla somma algebrica dei reciproci delle
1
singole resistenze e la resistenza equivalente è sempre minore della più piccola resistenza dell’insieme. In simboli, 𝑅𝑅
1
𝑅𝑅1
+
1
𝑅𝑅2
+
1
𝑅𝑅3
𝑒𝑒𝑒𝑒
+ ⋯.
=
Come abbiamo visto, circuiti semplici possono essere analizzati usando l’equazione ∆𝑉𝑉 = 𝑖𝑖𝑖𝑖 e le regole per i
collegamenti in serie e in parallelo dei resistori. Tuttavia, i resistori possono essere collegati in modo tale che i circuiti
non possano essere ridotti ad un singolo resistore equivalente. Il procedimento per analizzare circuiti complessi è
enormemente semplificato con l’uso di due semplici regole, dette leggi di Kirchhoff: la prima, spesso chiamata legge dei
nodi, afferma che la somma delle correnti che entrano in un nodo è uguale alla somma delle correnti che ne escono; in
simboli, ∑𝑛𝑛𝑛𝑛𝑛𝑛𝑛𝑛 𝐼𝐼 = 0. La seconda, invece, detta legge delle maglie, afferma che la somma delle differenze di potenziale
ai capi di ogni elemento all’interno di una maglia deve essere uguale a zero; in simboli, ∑𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚 ∆𝑉𝑉 = 0. La legge dei
nodi è una conseguenza della conservazione della carica: qualsiasi corrente entri in un dato punto di un circuito, deve
poi lasciare quel punto, poiché la carica non può nascere o scomparire in un punto. La seconda legge è, invece, una
Dispensa di Fisica Medica
MV
31
conseguenza della conservazione dell’energia: supponendo che una carica si muova in un qualsiasi percorso chiuso in un
circuito, il circuito deve guadagnare e perdere la stessa quantità di energia.
Forze e Campi Magnetici
Il fenomeno del magnetismo era conosciuto già dai Greci nell’800 a.C. e la bussola, strumento che sfrutta questo
fenomeno, pare fosse utilizzata in Cina già dal XIII secolo a.C. A differenza delle cariche elettriche, che possono essere
isolate, i poli magnetici si trovano sempre a coppie: ogni pezzetto di magnete permanente, tagliato un numero
grandissimo di volte, sarà sempre un dipolo magnetico. I poli sono chiamati Nord (N) e Sud (S). Hans Christian Oersted,
nel 1819, scoprì poi la relazione fra elettricità e magnetismo, notando che una corrente elettrica che percorre un filo fa
deflettere un ago magnetico che si trovi nelle vicinanze.
È conveniente descrivere le interazioni fra oggetti carichi in termini di campi elettrici che circondano cariche elettriche
stazionarie. Lo spazio che circonda una carica elettrica in moto, invece, è sede di un campo magnetico, oltre che di un
�⃗ in ogni punto è la direzione verso cui punta il polo
campo elettrico. La direzione ed il verso di un campo magnetico 𝐵𝐵
nord dell’ago di una bussola in quel punto. Si può tracciare il campo magnetico di una sbarretta magnetica con l’aiuto
di una bussola, definendo una linea di campo magnetico, analogamente a quanto fatto per il campo elettrico. L’esistenza
di un campo magnetico in un certo punto dello spazio può essere determinata misurando la forza 𝐹𝐹⃗𝐵𝐵 che si esercita su
una appropriata particella di prova (elettricamente carica, per esempio un protone) posta in quel punto. Si trova
sperimentalmente che la forza magnetica è proporzionale alla carica 𝑞𝑞 ed al modulo della velocità 𝑣𝑣 della particella.
Inoltre, quando una particella carica si muove parallelamente al vettore campo magnetico, la forza magnetica che agisce
sulla carica è nulla, mentre quando il vettore velocità forma un angolo 𝜗𝜗 con il campo magnetico, la forza magnetica
�⃗: cioè, la forza magnetica è perpendicolare al piano formato da 𝑣𝑣⃗ e 𝐵𝐵
�⃗.
agisce in direzione perpendicolare sia a 𝑣𝑣⃗ che a 𝐵𝐵
Inoltre, si trova sperimentalmente che la forza magnetica su una carica negativa è diretta in verso opposto a quella che
agisce su una carica positiva che si muova nello stesso verso. Questi risultati mostrano che la forza magnetica agente
su una particella è più complicata della forza elettrica. Queste osservazioni si possono riassumere in una forma compatta:
�⃗. L’unità di misura nel SI del campo magnetico è il tesla (T), uguale ad 1 𝑁𝑁 ∙ 𝑠𝑠⁄𝐶𝐶 ∙ 𝑚𝑚. Il modulo della forza
𝐹𝐹⃗𝐵𝐵 = 𝑞𝑞𝑣𝑣⃗ × 𝐵𝐵
�⃗; è, invece, nulla
magnetica è, quindi, uguale a |𝑞𝑞|𝑣𝑣𝑣𝑣 𝑠𝑠𝑠𝑠𝑠𝑠 𝜗𝜗: è, quindi, massima (|𝑞𝑞|𝑣𝑣𝑣𝑣) quando 𝑣𝑣⃗ è perpendicolare a 𝐵𝐵
�⃗ (𝜗𝜗 = 0° 𝑜𝑜 180°). La direzione ed il verso si ricavano con la regola della mano
quando 𝑣𝑣⃗ è parallela o antiparallela a 𝐵𝐵
destra.
La forza magnetica che agisce su una particella carica in moto in un campo magnetico è perpendicolare alla velocità
della particella e, di conseguenza, il lavoro svolto dalla forza magnetica sulla particella è zero. Consideriamo il caso di
una particella carica positivamente che si muova in un campo magnetico uniforme quando il vettore velocità iniziale
della particella è perpendicolare al campo. La particella si muove lungo una traiettoria circolare il cui piano è
perpendicolare al campo magnetico. Il raggio della traiettoria può essere determinato con l’applicazione della seconda
legge di Newton: ∑ 𝐹𝐹 = 𝐹𝐹𝐵𝐵 = 𝑚𝑚𝑚𝑚 → 𝑞𝑞𝑞𝑞𝐵𝐵 =
𝑚𝑚𝑣𝑣 2
𝑟𝑟
→ 𝑟𝑟 =
𝑚𝑚𝑚𝑚
𝑞𝑞𝑞𝑞
; il raggio della traiettoria è, quindi, proporzionale alla
quantità di moto della particella ed inversamente proporzionale alla sua carica e all’intensità del campo magnetico. Il
periodo del moto è uguale alla lunghezza della circonferenza diviso per la velocità della particella. In simboli, 𝑇𝑇 =
2𝜋𝜋
𝜔𝜔
=
2𝜋𝜋𝜋𝜋
𝑞𝑞𝑞𝑞
2𝜋𝜋𝜋𝜋
𝑣𝑣
=
. Questi risultati mostrano che la velocità angolare della particella ed il periodo del moto circolare non
dipendono dalla velocità traslazionale della particella o dal raggio dell’orbita di una data particella in un campo
magnetico uniforme. La velocità angolare 𝜔𝜔 è spesso indicata come frequenza di ciclotrone, poiché particelle cariche
ruotano con questa velocità angolare in un tipo di acceleratore chiamato ciclotrone.
�⃗,
Se una particella carica si muova in un campo magnetico uniforme con la sua velocità che forma un certo angolo con 𝐵𝐵
la sua traiettoria è elicoidale. Per esempio, se il campo è nella direzione 𝑥𝑥, non c’è alcuna componente della forza nella
direzione 𝑥𝑥. Di conseguenza, 𝑎𝑎𝑥𝑥 = 0 e la componente 𝑥𝑥 della velocità rimane costante. Tuttavia, la forza magnetica
Dispensa di Fisica Medica
MV
32
�⃗ fa variare nel tempo le componenti 𝑣𝑣𝑦𝑦 e 𝑣𝑣𝑧𝑧 ed il moto risultante è un’elica che ha il suo asse parallelo al campo
𝑞𝑞𝑣𝑣⃗ × 𝐵𝐵
magnetico.
Poiché su una singola particella carica che si muove in un campo magnetico esterno si esercita una forza magnetica, non
dovrebbe meravigliare che anche un filo percorso da corrente sia soggetto ad una forza magnetica quando venga posto
in un campo magnetico esterno. Tutto ciò deriva dal fatto che la corrente non è altro che un insieme di molte particelle
cariche in movimento, quindi la forza magnetica risultante sul filo è dovuta alla somma di tutte le singole forze
magnetiche sulle particelle cariche. Si può osservare la forza magnetica che agisce su un filo percorso da corrente
sospendendo un filo tra le facce di un magnete. Il filo si piega a sinistra o a destra quando è attraversato da corrente (a
seconda del verso stesso della corrente). Per rendere questa discussione quantitativa, possiamo esprimere la forza
�⃗ × 𝐵𝐵
�⃗ è un vettore diretto nel verso della corrente
�⃗, dove ℓ
magnetica su un conduttore percorso da corrente come 𝐹𝐹⃗𝐵𝐵 = 𝑖𝑖ℓ
𝑖𝑖, il cui modulo è uguale alla lunghezza del tratto. Questa espressione si applica unicamente al caso di un tratto rettilineo
di un filo in un campo magnetico esterno uniforme. Per un filo di forma arbitraria e sezione uniforme, l’espressione
�⃗ → 𝐹𝐹⃗𝐵𝐵 = 𝑖𝑖 ∫𝑏𝑏 𝑑𝑑𝑠𝑠⃗ × 𝐵𝐵
�⃗, dove a e b sono due punti arbitrari e 𝑑𝑑𝑠𝑠⃗ è un vettore che rappresenta la
diventa 𝑑𝑑𝐹𝐹⃗𝐵𝐵 = 𝑖𝑖𝑖𝑖𝑠𝑠⃗ × 𝐵𝐵
𝑎𝑎
lunghezza del tratto, con il suo verso uguale a quello della corrente.
All’inizio del XIX secolo, Jean-Baptiste Biot e Félix Savart giunsero ad un’espressione per il campo magnetico in un punto
dello spazio in funzione della corrente che genera il campo. La legge di Biot-Savart può essere espressa, in simboli, come
�⃗ = 𝑘𝑘𝑚𝑚 𝑖𝑖 𝑑𝑑𝑠𝑠⃗2×𝑟𝑟̂ , dove 𝑑𝑑𝑑𝑑 è l’elemento di corrente di lunghezza infinitesima del filo, 𝑟𝑟̂ è il versore diretto
segue: 𝑑𝑑𝐵𝐵
𝑟𝑟
dall’elemento al punto P dove si vuole calcolare il campo magnetico, 𝑟𝑟 è la distanza fra l’elemento ed il punto P e 𝑘𝑘𝑚𝑚 è
𝜇𝜇
una costante che, nel SI, vale esattamente 10−7 𝑇𝑇 ∙ 𝑚𝑚⁄𝐴𝐴. La costante 𝑘𝑘𝑚𝑚 viene anche scritta comunemente come 0 ,
4𝜋𝜋
dove 𝜇𝜇0 è un’altra costante, nota come permeabilità magnetica nel vuoto, uguale a 4𝜋𝜋𝑘𝑘𝑚𝑚 . La legge di Biot-Savart può,
�⃗ = 𝜇𝜇0 𝑖𝑖 𝑑𝑑𝑠𝑠⃗2×𝑟𝑟̂ .
quindi, essere scritta anche nella forma 𝑑𝑑𝐵𝐵
4𝜋𝜋 𝑟𝑟
Immaginiamo un filo metallico rettilineo che si trovi in un campo magnetico uniforme entrante nel foglio; all’interno del
filo, vi sono elettroni liberi. Supponiamo, ora, che il filo si muova con velocità 𝑣𝑣⃗ verso destra: una forza magnetica (diretta
verso il basso) agisce sugli elettroni del filo. Poiché questa direzione è lungo il filo, gli elettroni si muovono lungo il filo in
risposta a questa forza: quindi, si produce una corrente nel filo quando esso si muove nel campo magnetico! Un altro
semplice esperimento consiste nel collegare una spira di filo conduttore ad un galvanometro. Se si avvicina un magnete
alla spira, l’indice del galvanometro si sposterà in un certo verso, mentre quando il magnete è tenuto fermo, l’ago non
si sposterà. Se, poi, il magnete è allontanato dalla spira, l’indice si sposterà nel verso opposto. Le stesse osservazioni si
ottengono se il magnete è tenuto fermo ed è la spira ad essere avvicinata o allontanata da esso. Si può, quindi,
concludere che una corrente elettrica circola nel galvanometro ogni volta che vi è un moto relativo del magnete rispetto
alla spira. Questa corrente, generata senza che vi sia una batteria nel circuito, è chiamata corrente indotta ed è generata
da una f.e.m. indotta. Michael Faraday concluse da un esperimento effettuato con una bobina che una corrente elettrica
può essere generata da un campo magnetico variabile nel tempo (e non da un campo magnetico stazionario). Per
rendere questa affermazione quantitativa, è necessario definire una grandezza chiamata flusso magnetico,
proporzionale al numero di linee di campo associate al campo magnetico (analogamente alla proporzionalità del flusso
elettrico al numero di linee di campo associate al campo elettrico). Considerando un elemento di area 𝑑𝑑𝑑𝑑 su una
�⃗, allora il flusso magnetico
superficie di forma arbitraria, se il campo magnetico in questo punto di questo elemento è 𝐵𝐵
�⃗ ∙ 𝑑𝑑𝐴𝐴⃗, dove 𝑑𝑑𝐴𝐴⃗ è un vettore perpendicolare alla superficie, il cui modulo è uguale all’area 𝑑𝑑𝑑𝑑.
attraverso l’elemento è 𝐵𝐵
�⃗ ∙ 𝑑𝑑𝐴𝐴⃗ . L’unità di misura del flusso nel SI è il tesla per metro
Quindi, il flusso totale 𝛷𝛷𝐵𝐵 attraverso la superficie è 𝛷𝛷𝐵𝐵 = ∫ 𝐵𝐵
quadrato, chiamato Weber (Wb).
Si ha, quindi, una forza elettromotrice indotta in un circuito quando il flusso magnetico attraverso la superficie che limita
il circuito varia nel tempo. La legge di Faraday dell’induzione afferma, infatti, che la f.e.m. indotta in un circuito è uguale
alla rapidità con cui varia il flusso magnetico attraverso il circuito. In simboli, 𝑓𝑓. 𝑒𝑒. 𝑚𝑚. = −
Dispensa di Fisica Medica
𝑑𝑑𝛷𝛷𝐵𝐵
𝑑𝑑𝑑𝑑
, dove 𝛷𝛷𝐵𝐵 è il flusso
MV
33
magnetico attraverso la superficie che limita il circuito. Se il circuito è una bobina di N spire, tutte concentriche e di
uguale superficie, e il flusso è concatenato con tutte le spire, la f.e.m. indotta sarà uguale a 𝑓𝑓. 𝑒𝑒. 𝑚𝑚. = −𝑁𝑁
𝑑𝑑𝛷𝛷𝐵𝐵
𝑑𝑑𝑑𝑑
: la f.e.m.
aumenta di un fattore N poiché tutte le spire sono in serie, cosicché le f.e.m. delle singole spire si sommano a dare la
f.e.m. totale.
Il segno negativo della legge di Faraday è espressione della legge di Lenz (una legge espressa a parole, a cui non è
associata alcuna equazione): la polarità della f.e.m. indotta nell’avvolgimento tende a produrre una corrente il cui campo
magnetico si oppone alla variazione del flusso concatenato con il circuito. Ovvero, la corrente indotta è in una direzione
tale che il campo magnetico indotto tende a mantenere il flusso iniziale attraverso il circuito.
Consideriamo un circuito formato da un interruttore, un resistore ed una sorgente di f.e.m.: quando si chiude
l’interruttore, la corrente non passa istantaneamente da zero al suo valore massimo 𝑓𝑓. 𝑒𝑒. 𝑚𝑚.⁄𝑅𝑅; la legge di Faraday
predice il reale comportamento: aumentando la corrente nel tempo, aumenta anche il flusso magnetico concatenato
con il circuito, dovuto a questa corrente. Questo aumento di flusso magnetico da parte del circuito induce una f.e.m. nel
circuito, che si oppone alla variazione del flusso magnetico concatenato con il circuito. Dalla legge di Lenz, il campo
elettrico indotto nel filo deve essere opposto al verso della corrente e la presenza di questa f.e.m. opposta porta ad un
graduale aumento della corrente. Questo effetto è detto autoinduzione, perché la variazione di flusso magnetico
concatenato con il circuito ha origine dal circuito stesso. La f.e.m. che ha origine in questo caso è chiamata f.e.m.
autoindotta. Dalla legge di Faraday, sappiamo che la f.e.m. indotta è data dalla rapidità con cui varia il flusso magnetico
concatenato con il circuito, con il segno cambiato. Quindi, la f.e.m. autoindotta è sempre proporzionale alla rapidità con
cui varia la corrente nel tempo. Per una bobina costituita da 𝑁𝑁 spire, addossate l’una all’altra (solenoide ideale o bobina
toroidale), si trova che 𝑓𝑓. 𝑒𝑒. 𝑚𝑚.𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎 = −𝑁𝑁
𝑑𝑑𝛷𝛷𝐵𝐵
𝑑𝑑𝑑𝑑
= −𝐿𝐿
𝑑𝑑𝑑𝑑
𝑑𝑑𝑑𝑑
, dove 𝐿𝐿 è una costante di proporzionalità chiamata
induttanza della bobina, che dipende dalle caratteristiche geometriche e fisiche della bobina. Da questa espressione,
vediamo che l’induttanza di una bobina avente 𝑁𝑁 spire è data da: 𝐿𝐿 =
𝑁𝑁𝛷𝛷𝐵𝐵
𝑖𝑖
, assumendo che il flusso attraverso ciascuna
spira sia lo stesso. Possiamo anche scrivere l’induttanza come rapporto 𝐿𝐿 = −
𝑓𝑓.𝑒𝑒.𝑚𝑚.𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎
𝑑𝑑𝑑𝑑 ⁄𝑑𝑑𝑑𝑑
, indipendentemente dalla
forma o dalla grandezza del circuito. L’unità di misura dell’induttanza nel SI è l’henry (H), equivalente ad 1 𝑉𝑉 ∙ 𝑠𝑠⁄𝐴𝐴.
Le Onde Elettromagnetiche
Nella sua teoria unificata dell’elettromagnetismo, James Clerk Maxwell dimostrò che i campi elettrici e magnetici
dipendenti dal tempo soddisfano un’equazione d’onda lineare. La più importante conseguenza di questa teoria è la
previsione dell’esistenza delle onde elettromagnetiche. Le equazioni mi di Maxwell prevedono che un’onda
elettromagnetica consista di campi elettrici e magnetici oscillanti; la variazione dei campi crea reciprocamente il
mantenimento della propagazione dell’onda: il campo elettrico variabile induce un campo magnetico ed un campo
�⃗ sono perpendicolari fra di loro e con la direzione di
magnetico variabile induce un campo elettrico. I vettori 𝐸𝐸�⃗ e 𝐵𝐵
�⃗. La velocità a cui si muovono le onde elettromagnetiche
propagazione, ovvero la direzione del prodotto vettoriale 𝐸𝐸�⃗ × 𝐵𝐵
è data dalla relazione 𝑐𝑐 =
1
�𝜀𝜀0 𝜇𝜇0
= 299792 × 108 𝑚𝑚⁄𝑠𝑠. Poiché questa è esattamente uguale alla velocità della luce (nel
vuoto), si è (correttamente) portati a credere che la luce sia un’onda elettromagnetica. Inoltre, in ogni istante, in un’onda
elettromagnetica, il rapporto fra il campo elettrico ed il campo magnetico è uguale alla velocità della luce. In simboli,
𝐸𝐸
𝐵𝐵
= 𝑐𝑐.
Le onde elettromagnetiche viaggiano nel vuoto con velocità 𝑐𝑐 , frequenza 𝑓𝑓 e lunghezza d’onda 𝜆𝜆 . L’intervallo di
lunghezze d’onda e frequenze è molto vasto e si distinguono, al suo interno, molti tipi diversi di onde elettromagnetiche.
Le onde radio sono il prodotto di cariche accelerate, per esempio, nel filo conduttore di un’antenna radio. Le microonde
sono onde radio di piccola lunghezza d’onda (tra 1mm e 30cm), utilizzate nei sistemi radar, nella navigazione aerea e
per studiare le proprietà atomiche e molecolari della materia, oltre a trovare un’applicazione domestica nei forni a
microonde. Le onde infrarosse hanno lunghezze d’onda che vanno da circa 1mm alla più lunga lunghezza d’onda della
Dispensa di Fisica Medica
MV
34
luce visibile, pari a 7 × 10−7 𝑚𝑚, sono prodotte dai corpi caldi e dalle molecole e sono facilmente assorbite dalla maggior
parte dei materiali; la radiazione infrarossa ha molte applicazioni pratiche e scientifiche: la fotografia all’infrarosso, la
terapia fisica, la spettroscopia vibrazionale, nonché i telecomandi per TV, DVD e videoregistratore. La luce visibile è
certamente la più familiare forma di onde elettromagnetiche, definita come quella parte di spettro elettromagnetico che
l’occhio umano può rivelare; è prodotta dagli oggetti incandescenti, come il filo di una lampadina, e dalla disposizione
degli elettroni in atomi e molecole; le varie lunghezze d’onda sono classificate con colori che vanno dal violetto (𝜆𝜆 ≈ 4 ×
10−7 𝑚𝑚) al rosso (𝜆𝜆 ≈ 7 × 10−7 𝑚𝑚); la sensibilità dell’occhio umano è una funzione della lunghezza d’onda ed è massima
alla lunghezza d’onda di circa 5.5 × 10−7 𝑚𝑚 (giallo-verde). La luce ultravioletta copre le lunghezze d’onda che vanno da
circa 4 × 10−7 𝑚𝑚 (400 nm) fino a 6 × 10−10 𝑚𝑚 (0.6 nm); il Sole è una sorgente importante di luce ultravioletta, la
principale responsabile dell’abbronzatura; la maggior parte della radiazione ultravioletta proveniente dal Sole viene
assorbita dagli atomi della parte superiore dell’atmosfera, chiamata stratosfera, costituita principalmente da ozono
(𝑂𝑂3 ), che risulta dall’interazione della radiazione ultravioletta con l’ossigeno: questo schermo di ozono converte la letale
radiazione ultravioletta di alta energia in innocua radiazione infrarossa. I raggi X sono onde elettromagnetiche con
lunghezze d’onda comprese in un intervallo che va da circa 10−8 𝑚𝑚 (10 nm) fino a 10−13 𝑚𝑚 (10−4 nm); i raggi X vengono
comunemente prodotti mediante la decelerazione di elettroni ad alta energia che bombardano un bersaglio metallico;
sono usati come strumento diagnostico in medicina e per il trattamento di alcune forme di cancro, oltre che nello studio
della struttura cristallina, poiché hanno lunghezze d’onda confrontabili con le distanze interatomiche nei solidi. I raggi
gamma, infine, sono onde elettromagnetiche emesse da nuclei radioattivi ed in alcune reazioni nucleari, hanno
lunghezze d’onda comprese fra circa 10−10 𝑚𝑚 e meno di 10−14 𝑚𝑚, sono altamente penetranti e producono seri danni
quando vengono assorbiti dai tessuti viventi.
Ottica
Sebbene incontriamo la luce ogni giorno, non appena apriamo gli occhi al mattino, a questa esperienza è associato un
fenomeno fisico davvero complicato. Il modello corpuscolare (capofila del quale era Isaac Newton) vedeva la luce
formata da un flusso di particelle emesse da una sorgente: esso spiegava molti fenomeni, quali la riflessione e la
rifrazione. Nel 1600 Christiaan Huygens propose una teoria alternativa, che vedeva la luce come un fenomeno
ondulatorio, dimostrando che anche un simile modello poteva spiegare riflessione e rifrazione. Tuttavia, per la grande
fama di Newton e per l’evidenza che la luce, a differenza delle onde conosciute all’epoca (onde sonore, onde nell’acqua,
etc.), avrebbe dovuto propagarsi nel vuoto (per giungere dal Sole a noi), la teoria non fu accettata. Nel 1801 Thomas
Young dimostrò chiaramente la natura ondulatoria della luce, mostrando che, sotto appropriate condizioni, essa dava
origine a fenomeni di interferenza. In seguito, grazie agli ulteriori sviluppi della scienza e, soprattutto, al lavoro di James
Clerk Maxwell, il modello ondulatorio della luce fu accettato dalla comunità scientifica. Tuttavia, alcuni esperimenti
successivi, quali l’effetto fotoelettrico, non potevano essere spiegati supponendo che la luce fosse un’onda. Considerando
tutto ciò, oggi si afferma unanimemente che la luce possiede una doppia natura: in alcuni casi corpuscolare, in altri
ondulatoria.
La natura ondulatoria della luce si basa sul modello a raggi luminosi (o approssimazione geometrica dell’ottica). Un
raggio è una linea retta tracciata lungo la direzione di propagazione di una singola onda che mostra il percorso dell’onda
quando essa viaggia nello spazio. Se un’onda piana incontra un ostacolo con un’apertura circolare, il cui diametro sia
grande rispetto alla lunghezza d’onda, l’onda che emerge dall’apertura continua a muoversi secondo una linea retta (a
meno di alcuni piccoli effetti di bordo) e l’approssimazione geometrica continua ad essere valida; se, invece, il diametro
dell’apertura dell’ostacolo è dell’ordine della lunghezza d’onda, le onde (e conseguentemente i raggi che tracciamo) si
diffondono dall’apertura in tutte le direzioni: l’onda entrante subisce diffrazione quando passa attraverso l’apertura.
Infine, se l’apertura è piccola rispetto alla lunghezza d’onda, la diffrazione è così forte che l’apertura può essere
approssimata ad una sorgente puntiforme di onde: pertanto, l’effetto della diffrazione è tanto più pronunciato quanto
più il rapporto 𝑑𝑑⁄𝜆𝜆 si avvicina a zero. Supponendo che l’apertura sia un cerchio di diametro 𝑑𝑑, l’approssimazione dei
raggi luminosi assume che 𝜆𝜆 ≪ 𝑑𝑑, cosicché non avremo a che fare con gli effetti della diffrazione, che dipendono
Dispensa di Fisica Medica
MV
35
totalmente dalla natura ondulatoria della luce. L’approssimazione geometrica è ottima per lo studio di specchi, lenti,
prismi e strumenti ottici composti, quali telescopi, macchine fotografiche ed occhiali.
Consideriamo dei raggi luminosi incidenti su una superficie: a meno che la superficie sia perfettamente assorbente, una
certa parte della luce è riflessa dalla superficie. Se la superficie è molto liscia, i raggi riflessi saranno paralleli: tale
riflessione è chiamata riflessione speculare. D’altro canto, se la superficie riflettente è ruvida, la superficie rifletterà i
raggi in varie direzioni: tale riflessione è detta riflessione diffusa. Una superficie si comporterà come una superficie liscia
fintantoché le rugosità superficiali sono piccole se confrontate con la lunghezza d’onda della luce incidente. Per esempio,
la luce passa attraverso i piccoli buchi della porta di un forno a microonde, permettendo di guardare dentro, mentre le
microonde, a causa della loro grande lunghezza d’onda, vengono riflesse dalla porta come se fosse un pezzo di metallo
pieno. Considerato un raggio luminoso che viaggia in aria ed incide con un certo angolo su di una superficie piana e liscia,
i raggi incidente e riflesso formano angoli 𝜗𝜗1 e 𝜗𝜗1′ rispetto ad una linea tracciata perpendicolarmente alla superficie nel
punto in cui il raggio incidente colpisce la superficie. Gli esperimenti mostrano che l’angolo di riflessione è uguale
all’angolo di incidenza. In simboli, 𝜗𝜗1 = 𝜗𝜗1′ , equazione nota come legge della riflessione. Il cammino di un raggio di luce
è, inoltre, reversibile. Un’applicazione pratica della legge della riflessione è la proiezione digitale delle pellicole
cinematografiche, spettacoli televisivi e presentazioni al computer.
Una parte dell’energia di un’onda incidente su una discontinuità viene trasmessa attraverso la discontinuità. Quando un
raggio di luce che viaggia in un mezzo trasparente incide obliquamente su una superficie di separazione con un altro
mezzo trasparente (per esempio, aria-qcqua), parte del raggio è riflessa, ma parte è trasmessa nel secondo mezzo. Il
raggio luminoso che entra nel secondo mezzo subisce una variazione di direzione sul confine dei due mezzi e si dice che
è rifratto. Il raggio incidente, il raggio riflesso ed il raggio rifratto giacciono sullo stesso piano. L’angolo di rifrazione 𝜗𝜗2
𝑠𝑠𝑠𝑠𝑠𝑠 𝜗𝜗
𝑣𝑣
dipende dalle proprietà dei due mezzi e dall’angolo di incidenza secondo la relazione 𝑠𝑠𝑠𝑠𝑠𝑠 𝜗𝜗2 = 𝑣𝑣2 = 𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐, dove 𝑣𝑣1 è
1
1
la velocità nel mezzo 1 e 𝑣𝑣2 quella nel mezzo 2. Come nel caso della riflessione, la traiettoria di un raggio luminoso
attraverso una superficie rifrangente è reversibile. La luce, passando da un mezzo ad un altro, viene rifratta poiché la
sua velocità media è diversa nei due mezzi. Infatti, la luce viaggia con la sua massima velocità nel vuoto. È conveniente
definire l’indice di rifrazione 𝑛𝑛 di un mezzo come il rapporto 𝑛𝑛 ≡
𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣à 𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑 𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙 𝑛𝑛𝑛𝑛𝑛𝑛 𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣
𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣à 𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚 𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑 𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙 𝑛𝑛𝑛𝑛𝑛𝑛 𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚𝑚
𝑐𝑐
= . Da questa
𝑣𝑣
definizione vediamo che l’indice di rifrazione è una grandezza adimensionale maggiore o uguale all’unità, poiché 𝑣𝑣 in un
mezzo è minore di 𝑐𝑐. Inoltre, 𝑛𝑛 è uguale all’unità per il vuoto. Quando un’onda passa da un mezzo all’altro, la sua
frequenza non varia. Poiché la relazione 𝑣𝑣 = 𝑓𝑓𝑓𝑓 deve essere valida, e le velocità sono diverse, le due lunghezze d’onda
sono differenti. Possiamo, quindi, esprimere una relazione nota come legge della rifrazione o legge di Snell (o, in Francia,
come legge di Descartes): 𝑛𝑛1 𝑠𝑠𝑠𝑠𝑠𝑠 𝜗𝜗1 = 𝑛𝑛2 𝑠𝑠𝑠𝑠𝑠𝑠 𝜗𝜗2 .
L’indice di rifrazione quando la luce entra in un materiale dipende, effettuando misure molto accurate, dalla lunghezza
d’onda della luce, poiché la velocità dell’onda dipende dalla sua lunghezza d’onda (questa dipendenza è nota come
dispersione). Ciò significa che la luce viola viene rifratta più della luce rossa quando passa dall’aria ad un materiale. Ecco
perché quando una luce bianca (ovvero una combinazione di tutte le lunghezze d’onda visibili) passa attraverso un
prisma, i raggi che emergono dalla seconda faccia del prisma si diffondono in una serie di colori nota come spettro
visibile (rosso – arancione – giallo – verde – blu – indaco – violetto). Questo è anche alla base del fenomeno
dell’arcobaleno, dovuto alla rifrazione della luce solare attraverso le gocce di pioggia sospese nell’atmosfera: essa viene
prima riflessa, poi rifratta ed infine riflessa una seconda volta, generando la serie dello spettro visibile. Si può generare
un arcobaleno secondario, meno intenso del primario e con i colori invertiti, se la luce subisce due riflessioni all’interno
della goccia. In laboratorio sono stati generati anche arcobaleni in cui la luce subisce 30 riflessioni prima di uscire dalla
goccia d’acqua.
Un effetto interessante è chiamato riflessione interna totale e può verificarsi quando la luce si propaga da un mezzo di
un dato indice di rifrazione ad uno con un indice di rifrazione minore. Ad un certo angolo di incidenza, chiamato angolo
limite, il raggio di luce si muoverà parallelo alla superficie; per angoli di incidenza maggiori, nessun raggio è rifratto ed
il raggio incidente è totalmente riflesso dalla superficie di separazione. Questo raggio è riflesso dalla superficie come se
Dispensa di Fisica Medica
MV
36
avesse incontrato una superficie perfettamente riflettente e segue la legge della riflessione: l’angolo di incidenza, cioè,
è uguale all’angolo di riflessione. Per trovare l’angolo limite possiamo usare la legge di Snell: se 𝜗𝜗1 = 𝜗𝜗𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙𝑙 e 𝜗𝜗2 = 90°,
𝑛𝑛
𝑛𝑛1 𝑠𝑠𝑠𝑠𝑠𝑠 𝜗𝜗𝑙𝑙 = 𝑛𝑛2 𝑠𝑠𝑠𝑠𝑠𝑠 90° = 𝑛𝑛2 , per cui 𝜗𝜗𝑙𝑙 = 2 . Si ricordi che questa equazione può essere usata solo quando la luce si
𝑛𝑛
1
propaga da un mezzo di un dato indice di rifrazione ad uno di indice minore, ovvero quando 𝑛𝑛1 > 𝑛𝑛2 . L’angolo limite per
la riflessione interna totale è piccolo quando 𝑛𝑛1 è considerevolmente maggiore di 𝑛𝑛2 , come nel diamante (𝑛𝑛 = 2.42 e
𝜗𝜗𝑙𝑙 = 24°), il che (insieme con la sua sfaccettatura) fa sì che esso scintilli quando si osserva alla luce.
Un’applicazione interessante della riflessione interna totale è l’uso di bacchette di vetro o di plastica trasparente per
guidare la luce da un posto all’altro. Nell’industria delle comunicazioni, impulsi di luce laser si muovono lungo questi tipi
di guide, portando informazioni ad alta velocità. La luce che viaggia all’interno di una bacchetta stretta e trasparente è
confinata a propagarsi entro la bacchetta, anche lungo curve dolci, come risultato di successive riflessioni interne. Una
tale guida di luce sarà flessibile se si usano fibre sottili, piuttosto che bacchette spesse: tali fibre sono dette fibre ottiche.
Se si usa un fascio di fibre ottiche parallele per costruire una linea di trasmissione ottica, si possono trasferire immagini
da un punto ad un altro. Una fibra ottica consiste di un nucleo trasparente circondato da un rivestimento di un materiale
che ha un basso indice di rifrazione rispetto al nucleo; l’insieme deve essere circondato da una guaina protettiva di
plastica per prevenire danni meccanici. Poiché l’indice di rifrazione del rivestimento è minore di quello del nucleo, la luce
che viaggia nel nucleo subisce riflessione interna totale quando arriva all’interfaccia nucleo-rivestimento con un angolo
di incidenza che supera l’angolo limite. In questo caso, la luce “rimbalza” lungo il nucleo della fibra ottica, perdendo
pochissimo della sua intensità mentre si propaga. Una singola fibra ottica può portare un segnale digitale. Se si vuole
trasportare un’immagine, serve un fascio di fibre ottiche: questi fasci sono utilizzati in medicina nel fibroscopio.
L’elemento ottico più semplice possibile è lo specchio piano. Consideriamo una sorgente puntiforme di luce posta nel
punto 𝑂𝑂 ad una distanza 𝑝𝑝 davanti ad uno specchio piano, indicata come distanza dell’oggetto. I raggi di luce
provenienti dalla sorgente sono riflessi dallo specchio. Dopo la riflessione, i raggi continuano a divergere (cioè, si
allontanano l’uno dall’altro). I raggi divergenti appaiono all’osservatore come provenienti da un punto 𝐼𝐼 dietro allo
specchio, chiamato immagine dell’oggetto posto in 𝑂𝑂 . In tutti i sistemi ottici, localizzeremo le immagini con i
prolungamenti dei raggi divergenti, fino al punto immagine in cui tali prolungamenti si incontrano. Le immagini sono
localizzate o in un punto da cui i raggi luminosi realmente divergono o in un punto da dove appaiono divergere. La
distanza 𝑞𝑞 tra l’immagine e lo specchio è chiamata distanza dell’immagine. Le immagini sono divise in reali e virtuali:
un’immagine reale è quella in cui la luce passa attraverso il punto immagine e diverge; un’immagine virtuale è quella
in cui la luce non passa attraverso il punto immagine, ma appare soltanto divergere da quel punto. L’immagine formata
dallo specchio appena descritto, così come ogni immagine di un oggetto reale visto in uno specchio piano, è virtuale. Le
immagini reali possono essere esposte su uno schermo (come in una proiezioni), le immagini virtuali no. L’immagine che
si forma al di là di uno specchio e l’oggetto che sta di fronte sono equidistanti dall’oggetto: ovvero, usando la convenzione
stabilita precedentemente, 𝑝𝑝 = |𝑞𝑞| (usiamo il simbolo di valore assoluto perché, come vedremo fra breve, ai valori di 𝑝𝑝
e 𝑞𝑞 è associata una convenzione sui segni. Inoltre, nel modello geometrico, l’altezza dell’oggetto, che chiamiamo ℎ, è
uguale all’altezza dell’immagine, che chiamiamo ℎ′ . Possiamo, quindi, definire l’ingrandimento lineare trasversale (o
semplicemente ingrandimento) 𝑀𝑀 di un’immagine come: 𝑀𝑀 ≡
𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎 𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑′𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖𝑖
𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎 𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑′𝑜𝑜𝑜𝑜𝑜𝑜𝑜𝑜𝑜𝑜𝑜𝑜𝑜𝑜
ℎ′
= ℎ . Per uno specchio piano, in cui
ℎ = ℎ′ , 𝑀𝑀 = 1. Inoltre, come indica il valore positivo dell’ingrandimento, l’immagine è dritta. Tuttavia, uno specchio
piano forma un’immagine che ha un’apparente inversione destra-sinistra: tuttavia, questa non è realmente
un’inversione destra-sinistra, bensì un’inversione fronte-retro, giacché, per esempio, considerando l’immagine di una
mano destra, è pur vero che essa appare come una mano sinistra, ma il pollice, a sinistra nella mano reale, è a sinistra
anche nella mano allo specchio! Essa è un’inversione fronte-retro causata dai raggi di luce che arrivano allo specchio e
poi sono riflessi indietro da esso.
Consideriamo, adesso, uno specchio sferico, formato, come dice il nome, da una calotta sferica. Se la luce è riflessa dalla
superficie interna, lo specchio è detto concavo. Un tale specchio possiede un raggio di curvatura 𝑅𝑅 ed un centro di
curvatura 𝐶𝐶; inoltre, il centro della calotta sferica è chiamato 𝑉𝑉 e la linea tracciata da 𝐶𝐶 a 𝑉𝑉 si chiama asse principale
dello specchio. Consideriamo una sorgente puntiforme di luce posta nel punto 𝑂𝑂, situato sull’asse principale, oltre il
Dispensa di Fisica Medica
MV
37
punto 𝐶𝐶 all’esterno. Due raggi divergenti originati in 𝑂𝑂, dopo essere riflessi dallo specchio, convergono e si incontrano
nel punto immagine 𝐼𝐼. Poi, i raggi continuano a divergere da 𝐼𝐼 come se lì vi fosse una sorgente di luce. Se gli occhi rivelano
i raggi divergenti dal punto 𝐼𝐼, si può affermare che una sorgente di luce è posta in quel punto. A differenza di quanto
abbiamo visto nello specchio piano, stavolta i raggi di luce passano attraverso il punto immagine e l’immagine è, quindi,
reale. Adottiamo, ora, un modello semplificato, assumendo che tutti i raggi divergenti da un oggetto formino un piccolo
angolo con l’asse principale. Questi raggi, detti raggi parassiali, si riflettono sempre attraverso il punto immagine; i raggi
che formano grandi angoli, invece, convergono in altri punti sull’asse principale, producendo un’immagine sfocata.
Possiamo calcolare la distanza dell’immagine 𝑞𝑞 conoscendo la distanza dell’oggetto 𝑝𝑝 ed il raggio di curvatura 𝑅𝑅 .
Consideriamo due raggi di luce provenienti dalla punta dell’oggetto, immaginandolo come una freccia. Uno di questi
raggi passa attraverso il centro di curvatura 𝐶𝐶 dello specchio, colpisce lo specchio perpendicolarmente alla superficie
speculare e si riflette all’indietro su se stesso. Il secondo raggio, invece, colpisce lo specchio dal vertice 𝑉𝑉 e si riflette,
obbedendo alla legge di riflessione. L’immagine della punta della freccia è collocata nel punto in cui questi due raggi si
intersecano. I due raggi identificano due triangoli, da cui vediamo che 𝜗𝜗 = ℎ⁄𝑝𝑝 per il triangolo formato dal secondo
raggio, mentre 𝜗𝜗 = − ℎ′ ⁄𝑞𝑞 per il triangolo individuato dal primo raggio. Il segno meno indica che l’immagine è
capovolta. Da questi risultati, troviamo che l’ingrandimento dell’immagine è uguale a 𝑀𝑀 =
questa equazione e dai due triangoli, possiamo trovare che
ℎ′
ℎ
=−
𝑅𝑅−𝑞𝑞
𝑝𝑝−𝑅𝑅
, da cui segue che
𝑅𝑅−𝑞𝑞
𝑝𝑝−𝑅𝑅
𝑞𝑞
ℎ′
ℎ
=
1
−𝑞𝑞 𝑡𝑡𝑡𝑡𝑡𝑡 𝜗𝜗
𝑝𝑝 𝑡𝑡𝑡𝑡𝑡𝑡 𝜗𝜗
1
2
𝑞𝑞
= − . Da
𝑝𝑝
= → + = , chiamata
𝑝𝑝
𝑝𝑝
𝑞𝑞
𝑅𝑅
equazione dello specchio, applicabile solo al modello dei raggi parassiali. Se l’oggetto è molto lontano dallo specchio,
cioè la distanza dell’oggetto 𝑝𝑝 è abbastanza grande confrontata con 𝑅𝑅, al punto che si possa dire che 𝑝𝑝 tende all’infinito,
𝑅𝑅
allora 1⁄𝑝𝑝 → 0 per cui 𝑞𝑞 ≈ , cioè quando l’oggetto è molto lontano dallo specchio, il punto immagine è in un punto
2
medio fra il vertice dello specchio ed il centro di curvatura. Il punto in cui i raggi (paralleli) si intersecano, dopo la
riflessione dello specchio, si chiama punto focale dello specchio, a distanza 𝑓𝑓 dallo specchio, detta distanza focale. In
𝑅𝑅
1
1
1
simboli, 𝑓𝑓 = 2 . L’equazione dello specchio, espressa in funzione della distanza focale, diventa: 𝑝𝑝 + 𝑞𝑞 = 𝑓𝑓.
Uno specchio convesso è uno specchio che riflette la luce dalla superficie esterna, anche chiamato specchio divergente
poiché i raggi che provengono da qualsiasi punto divergono dopo la riflessione, come se provenissero da un punto dietro
lo specchio. L’immagine prodotta da un simile specchio è virtuale, invece che reale, poiché la posizione da cui i raggi
sembrano aver origine è dietro lo specchio. In generale, l’immagine formata da uno specchio convesso sarà sempre
virtuale, dritta e più piccola dell’oggetto.
In conclusione, per uno specchio concavo, quando l’oggetto è collocato al di là del punto focale, l’immagine sarà reale
e capovolta (e la sua grandezza varierà con la posizione). Se, invece, l’oggetto è collocato tra lo specchio ed il punto
focale, l’immagine sarà virtuale, dritta ed ingrandita. Per uno specchio convesso, invece, in qualsiasi punto l’oggetto
sia collocato, l’immagine ottenuta sarà virtuale, dritta e rimpicciolita.
Dispensa di Fisica Medica
MV
38