Capitolo
5
Soluzioni
5. Lungo i tratti AB, CD, DE, che sono archi di circonferenza, l’accelerazione è
solo centripeta essendo il modulo della velocità costante. Si ha:
2
2
2
2
2
v
v
v
v
4 v
aAB
;
aCD
;
aDE
3
3R
1R
R
3 R
R
4
3
mentre nel tratto rettilineo BC essendo costante il modulo della velocità si ha:
aBC 0
Il massimo valore di accelerazione, tutta centripeta, si ha quindi durante la curva di raggio minimo DE, il minimo valore di accelerazione centripeta nella curva di raggio massimo AB, mentre il minimo valore di accelerazione in assoluto
è il valore nullo che si ha nel tratto rettilineo BC.
6. La forza centripeta è fornita tutta dalla forza di attrito statico fs , e la sua di
rezione è perpendicolare a quella in cui avanzano le ruote. Nel primo caso fs
non raggiunge il suo valore massimo, ma sappiamo però che la sua intensità
soddisfa la condizione 0 fs s N . Indicando con x la direzione radiale
istantanea come in figura, si ha:
2
v
15.02
fsx max fs m
1500
N 0.844 104 N
r
40.0
Per avere la velocità massima dobbiamo calcolare invece proprio la massima
forza di attrito statico s N e quindi trovare N . Dall’equilibrio in direzione
verticale si ha:
N y Wy 0
N mg 0
N mg
che sostituito nella relazione precedente:
2
2
v
v
fsx max max s N m
s m g m
r
r
v s gr 0.950 9.81 40.0 m/s 19.3 m/s .
1
N
N
N
W
W
W
In questo caso per la forza centripeta risulta
2
v
19.32
Fr m
1500
N 1.40 104 N .
r
40.0
7. Quando si trova nel punto più alto l’auto sta descrivendo una circonferenza,
quindi deve agire su di lei una forza verticale che punta verso il centro. Questo
significa che la somma delle forze che agiscono in verticale deve puntare in bas
so, cioè la forza N deve avere un’intensità minore di quella del peso W . E’ ben
nota infatti la sensazione di “alleggerimento” che da passeggeri si sperimenta
sulla sommità dei dossi: quello che si percepisce è proprio la diminuzione della
forza normale, che come sappiamo, invece, quando siamo in quiete resta sempre uguale al peso.
La forza centripeta è il risultato delle azioni congiunte di N e W , che in verticale si sottraggono. Osservando la direzione dell’asse verticale si ha ay
2
v
R
,
da cui si ricava per la forza centripeta:
N y Wy may
Fr N mg
2
v
10.52
N 9.56 103 N
R
15.0
mentre per la normale:
N mg 9.56 103 N N (1300 9.81 9.56 103 ) N 3.20 103 N
m
8. Fissato un riferimento nell’istante rappresentato in figura, sappiamo che in
direzione verticale non c’è accelerazione, poiché se l’angolo rimane costante,
la pallina non può né salire né scendere. Si ottiene:
Ty Wy may T cos 25.0 mg 0
T
T
Forza centripeta
W
1300
y
mg
0.300 9.81
N 3.25 N
cos 25.0
0.906
La forza centripeta è data dalla componente orizzontale della tensione, e coincide anche con la composizione data dalla regola del parallelogramma della
tensione e del peso, poiché la risultante di queste due forze, come abbiamo detto, è tutta orizzontale:
Fr T sin 25.0 3.25 0.423 N 1.37 N
x
quindi l’accelerazione centripeta vale:
Fr 1.37 4.57 m/s2
ac
m
0.300
2
Per avere la velocità eguagliamo tale valore all’espressione m v /R , dopo aver
trovato il raggio della traiettoria circolare:
R L sin 0.750 sin 25.0 0.317 m
m
2
v
R
R
0.317
1.37 N v (1.37 N) (1.37)
m/s 1.20 m/s
m
0.300
2
e ricaviamo da questa il tempo che occorre a compiere un giro dividendo il perimetro della circonferenza per la velocità costante:
2R
6.28 0.317
m/s 1.66 s
1.20
v
9. Fissato un riferimento con la direzione radiale istantanea lungo l’asse x , abbiamo che la forza centripeta è fornita dalla tensione della corda:
2
v
2.502
Tx max T m
0.450
5.63 N
r
0.500
Per la massa appesa, la condizione di equilibrio richiede che lungo l’asse verticale sia nulla l’accelerazione:
Ty Wy may T Mg 0 Mg T 5.63 N
y
T
m
x
T
da cui si ottiene:
T
5.63
M
kg 0.574 kg
g
9.81
M
W
11. Per poter eseguire il giro le ruote dell’auto devono mantenere sempre il
contatto con la pista, in particolare nel punto più alto. Questo avviene solo se in
ogni momento la velocità istantanea che la traiettoria di caduta libera che tende
a far descrivere all’auto ha la parte iniziale esterna alla pista, come nella curva
blu in figura. In tal modo la pista deve esercitare una forza normale per costringere l’auto a deviare verso il centro, ed il contatto è assicurato. Se viceversa la
velocità istantanea è così bassa da produrre una traiettoria di caduta libera interna alla pista (curva gialla), il contatto viene meno. Quando la condizione di
contatto è soddisfatta nel punto più alto, essa è certamente soddisfatta anche
nell’intero tragitto, dato che forza di gravità fa diminuire l’intensità della velocità man mano che l’auto sale.
Indicando con va la velocità alla sommità, in quel momento risulta:
N y Wy may
N mg m
va
La forza centripeta m
va
R
2
N mg m
va
2
R
2
che occorre per mantenere l’auto in pista è tanto più
piccola quanto minore è va . Il valore minimo di va è quello a cui basta la sola
gravità a produrre m
mg m
va
R
2
R
va
2
R
va
2
N
y
N
W
. Per esso risulta dunque N 0 nel punto più alto:
gR
va gR
12. Come si ricava dalla figura la somma vettoriale della forza normale e del peso debbono fornire la necessaria forza centripeta per descrivere una curva di
raggio R alla velocità assegnata. Il secondo principio della dinamica in forma
vettoriale si scrive:
N W ma N mg maC
3
N
N
y
x
W
N
R
Allo stesso risultato si perviene facendo il rapporto delle componenti orizzontale e verticale della forza normale:
| v |2
N x max N x m
R
N y Wy 0 N y mg 0 N y mg
mg
N
maC
L’equazione sopra scritta è facilmente visualizzabile in termini geometrici gra
zie al metodo di punta-coda. Si forma un triangolo di ipotenusa N ed i cui cate
ti maC ed mg , in base ai dati del problema, devono essere rispettivamente
orizzontale e verticale. Si dimostra facilmente che è pure l’angolo fra N ed
mg . Risulta dunque:
|v |2
maC
m R
| v |2
15.02
tan
0.153; tan1 (0.153) 8.69
gR
9.81
150
mg
mg
mg
tan
Nx
Ny
m
|v |2
R
mg
| v |2
gR
13. Il blocchetto scivola sicuramente se la massima forza di attrito statico non può
fornire la forza centripeta necessaria per seguire quel particolare moto circolare. Per
calcolare la forza centripeta ricaviamo la velocità:
33 lunghezza di 1 giro 33 2r
33 6.28 0.250
v
m/s 0.864 m/s
secondi in un minuto
60
60
2
v
0.8642
Fr m
m
2.99m
r
0.250
Il valore della forza centripeta non è noto in quanto è ignota la massa del blocchetto.
Tuttavia anche l’attrito statico che deve produrla ha un valore massimo che dipende
da m . Sapendo che l’equilibrio in direzione verticale produce N mg :
fS ,max S N S mg 0.150 9.81 m 1.47m
e come si vede risulta sempre 2.99m 1.47m qualunque sia la massa, cioè il blocchetto scivola in ogni caso perché l’attrito statico non ce la fa a fornire la necessaria
forza centripeta, neppure in caso assuma il suo valore massimo.
14. Il punto descrive in un periodo T 24 h 86400 s una circonferenza di raggio:
r RT cos 42 (6.378 106 0.7431) m 4.739 106 m
2r
6.28 4.739 106
6.28 4.739
v
m/s
1064 m/s 344 m/s
4
T
8.6400
8.6400 10
e come si vede la velocità trovata è superiore alla velocità del suono in aria. Per
l’accelerazione risulta:
2
v
3442
1.18336 105
aC
m/s2
m/s2
r
4.739 106
4.739 106
0.2497 1056 m/s2 2.50 102 m/s2
4
15. Osserviamo che il peso dell’auto W 1200 9.81 N 1.18 104 N è inferiore
al carico massimo sopportabile, tuttavia questo non permette di concludere che il
ponte non si rompe in quanto la forza normale N che esso esercita sull’auto, oltre ad
equilibrare la componente radiale del peso dell’auto (WR in figura), deve anche
produrre la necessaria forza centripeta affinché l’auto possa seguire la traiettoria circolare imposta dalla forma del ponte. Al crescere della componente radiale del peso,
la forza normale cresce in intensità fino al suo massimo, assunto nel punto più basso,
dove deve equilibrare l’intero peso dell’auto. La velocità massima si ottiene imponendo che il valore massimo della normale (quello nel punto più basso) sia proprio
1.50 104 N :
N
1.50 10 4
v R
g 200
9.81 23.2 m/s
m
1.200 10 3
2
v
N mg m
R
R
16. Sappiamo che la sfera sta descrivendo un moto circolare di raggio R. Fissiamo un asse delle ordinate orientato in alto e scriviamo la seconda legge della
dinamica nell’istante in cui la sfera passa sulla bilancia. Avremo:
2
v
N y Wy may N mg m
R
Da questo possiamo calcolare la normale esercitata dalla bilancia sulla sfera.
Poiché la bilancia segna 3.75 kg significa che si sta premendo contro di essa
v
bilancia
con una forza 3.75 9.81 N 36.8 N e cioè che, per la terza legge della dinami
ca, essa spinge sulla pallina con una forza di pari intensità, cioè N 36.8 N :
36.8 N 1.25 9.81 N 1.25
v
N
2
v
N
3.00
N 0
3.00(36.8 12.3)
m/s 7.67 m/s
1.25
17. Fintanto che il blocco segue il profilo dell’igloo sta descrivendo una traiettoria
circolare, e quindi occorre che le forze agenti su di lui, normale N e peso W , produ
cano la forza centripeta necessaria. La normale N come sappiamo è una forza passiva, che adegua man mano la sua intensità in conseguenza della forza con la quale
il blocco viene premuto contro l’igloo. Se l’igloo non ci fosse, il blocco seguirebbe sin
dall’inizio una traiettoria parabolica di caduta libera, che si troverebbe nello spazio
occupato dal ghiaccio. A mano a mano che procede la discesa, questa traiettoria ipotetica si va aprendo sempre più perché aumenta l’intensità della velocità con cui la
caduta libera avrebbe inizio. Nell’istante in cui la parabola diventa tutta esterna
all’igloo, il blocco non viene più premuto contro il ghiaccio e così si stacca. In quel
momento, dato che cessa di essere premuto, si annulla anche la forza normale.
Scegliendo un riferimento come in figura, osserviamo che il modulo della velocità non è uniforme, ma cresce durante la caduta per l’azione della gravità.
Il blocco seguirà il profilo circolare dell’igloo solo fino a quando la somma delle
forze radiali
F
r
riuscirà a produrre la necessaria forza centripeta m
5
2
v
R
:
direzione radiale
istantanea
y
N
y
R c os
W
x
Fr N mg cos m
2
v
R
Imponendo la condizione trovata sopra, per cui la normale si annulla al momento del distacco, si trova la velocità:
mg cos m
v Rg cos
v
t
2
v
R
19. L’angolo è acuto perché il modulo della velocità sta aumentando, e pertanto la
componente tangenziale dell’accelerazione deve essere orientata concordemente al
verso di percorrenza della traiettoria. Di conseguenza il vettore accelerazione deve
essere orientato prevalentemente nel verso di percorrenza, cosa che accade nel caso
dell’angolo acuto.
22. Si tratta di calcolare il periodo, che è il tempo corrispondente ad un singolo ciclo:
1
1
T
s 0.455 109 s
9
f
2.20 10
s
(3 / 2)R
3
4.71 rad
R
R
2
3
s
(3 / 4)R
3
135 s 2R
2.36 rad
8
R
R
4
2R
s
(1/ 3)R
60 s
1.05 rad
6
R
R
3
24. 270 s
r
3
2R
4
26. Sapendo che il giorno solare medio è periodo di rotazione, T 86400 s , si ha:
2
6.28
rad/s 7.27 105 rad/s
T
86400
Per avere la velocità lineare del punto P è necessario conoscere il raggio r della
circonferenza che esso descrive. Con riferimento alla figura si ha:
r 6400 km cos 42 4756 km
da cui si ricava:
v r (7.27 105 rad/s) (4756 km) 0.346 km/s 346 m/s
P
42
27. La frequenza è il numero di giri al secondo, quindi considerando 45 giri/min un
2R
numero esatto, si ha:
giri
45 giri
3
45
Hz f
min 60 s
4
da cui si ricava la velocità angolare, che tenendo tre cifre risulta:
3
3
2 f 2 rad/s rad/s 4.71 rad/s
4
2
per le velocità lineari è sufficiente moltiplicare per i due raggi:
d
18
vA A 4.71
cm/s 42 cm/s
2
2
d
4.5
vB B 4.71
cm/s 11 cm/s
2
2
2R
6
28. Risulta v V 20 m/s , infatti quando il punto di contatto ha fatto un giro
completo, anche il centro della ruota si è spostato di un tratto pari al perimetro della
ruota. Per la velocità angolare e la frequenza, identiche per tutti i punti della ruota,
risulta:
v
20
50
rad/s 50 rad/s f
Hz 8.0 Hz
R
0.40
2
6.28
30. Applicando la formula si ha, rispetto all’asse passante per il centro:
m
I mi ri2 m(L /2)2 m (L / 2)2 mL2 /2 (2.0 0.802 /2) kg m 2 0.64 kg m 2
e l’accelerazione angolare vale:
/I (5.0/ 0.64) rad/s2 7.8 rad/s2
m
31. Applicando la formula si ha, rispetto all’asse passante per il centro:
I ML2 /12 m(L /2)2 m(L /2)2
ML2 /12 mL2 / 2 [(1.50 0.802 /12) (2.0 0.802 / 2)] kg m2 0.72 kg m2
e l’accelerazione angolare vale:
/I (5.0/ 0.72) rad/s2 6.9 rad/s2
m1
32. Applicando la formula per il momento d’inerzia si ha, rispetto all’asse per il centro:
m2
I M 1L21 /12 2m1 (L1 / 2)2 M 2 L22 /12 2m2 (L2 / 2)2
m2
L21 (M 1 /12 m1 / 2) L22 (M 2 /12 m 2 /2)
[0.602 (7.0/12 2.0 /2) 0.302 (5.0/12 3.0/2)] kg m2 0.74 kg m2
E l’accelerazione angolare è:
2
m1
2
/I (9.0/ 0.74) rad/s 12 rad/s
33. Il momento d’inerzia risultante è la somma di quello di un anello più quello di
due barre rispetto al centro, di lunghezza ciascuna 2R . Dalla tabella:
I mAR2 2mB (2 /12) m AR 2 2mB (4R2 /12) R2 (m A 2mB / 3)
[0.2502 (1.50 2 1.00 / 3)] kg m2 0.135 kg m2
E l’accelerazione angolare è:
/I (12.0/ 0.135) rad/s2 88.9 rad/s2
34. Il momento d’inerzia complessivo si ottiene sommando quello del disco (cioè di
un cilindro) a quello delle tre masse puntiformi:
2
2
A
2
I (1/ 2)MR 2 mAOA mBOB mC OC
[(1/2) 10.0 3.002 2.00 2.002 1.20 1.502 1.40 2.602 ] kg m2 65.1 kg m2
L’accelerazione angolare si trova dividendo il momento della forza |F | R per il
momento d’inerzia. La rotazione è antioraria e tutte le quantità sono positive:
/I |F | R /I (100 3.00/ 65.1) rad/s2 4.61 rad/s2
7
F
O
C
B
R
34. L’accelerazione angolare da imprimere si ottiene dalla formula per
l’accelerazione angolare media:
0 5.00
rad/s2 2.00 rad/s2
t
2.50
Negativa quindi in senso orario. Calcoliamo il momento d’inerzia della piattaforma
sommando quello dei due cilindri:
R2
I (1/ 2)m1R12 (1/2)m2R22 (1/2)(280 4.002 120 2.202 ) kg m2 290 kg m2
R1
Da questi due valori si ha il momento da esercitare, negativo e quindi orario, come
l’accelerazione angolare:
I [290 (2.00)] Nm 580 Nm
37. Il raggio della ruota è la metà della distanza del suo punto più alto da terra,
R (0.70/ 2) m 0.35 m . La velocità della bicicletta coincide con la velocità | vC |
del centro della ruota, quindi:
| vC | /r (18.0/ 0.35) rad/s 51 rad/s
La velocità del punto P più in alto vale:
vP 2r (2 51 0.35) m/s 38 m/s
vA
38. Un punto verticalmente sopra al centro, a distanza d dal contatto a terra, ha
velocità istantanea d , da cui:
| vA | / d (7.00/0.300) rad/s 23.3 rad/s
d
Applicando la stessa formula alla velocità del centro delle ruote, che coincide con la
velocità del motorino, si trova:
r | vC | / (5.00 /23.3) m 0.215 m 21.5 cm
vC
m
39. La velocità di caduta della massa è uguale alla velocità del punto più alto del
rocchetto, da cui abbiamo la velocità angolare:
| v | / 2r (45.0/ 30.0) rad/s 1.50 rad/s
La velocità del centro del rocchetto è, come sappiamo, la metà di quella del suo
punto più alto e cioè 22.5 cm/s
41. Poniamo un asse delle ascisse parallelo al piano, orientato in basso. Usando la
formula per l’accelerazione sul piano inclinato di una sfera piena che rotola:
v0
R
25
a
mR2 sin
2
mR I
g
m R2 sin
g
sin 25
9.81 m/s2 5.80 m/s2
5 /7
m R2 2 m R2 / 5
L’accelerazione angolare è oraria, quindi negativa:
a /R (5.80/0.0600) rad/s2 10.4 rad/s2
Per lo spazio percorso usiamo la legge oraria nella forma v 2 v 02 2a x imponendo che la velocità sia annulli:
x v02 /2a (4.002 /2 5.80) m 1.38 m
negativo perché contro il verso delle ascisse scelte. Percorre quindi 1.38 m .
8
42. Applichiamo la seconda legge della dinamica per calcolare l’accelerazione con
cui scende lo yo-yo, in un riferimento con l’asse delle ordinate verticale orientato in
alto:
Ty Wy may mg |T | m |a | |a | g |T | /m
Applichiamo poi la relazione I rispetto all’asse centrale, rispetto al quale
solo la tensione ha momento diverso da zero, e tende a far ruotare in verso antiorario:
I |T |R I
Considerato che per un cilindro I mR2 /2 e che |a |/R :
|T |R I (mR2 / 2)|a | /R |T | m |a | /2
Sostituendo:
|a | g |T | /m g |a | / 2 |a | 2g / 3
2g / 3R 131 rad/s2
47. Trasformiamo il periodo in secondi:
T (27 24 3600 7 3600 43 60) s 2.36 106 s
sappiamo che vale la relazione:
2rL
GMT
vo
T
rL
rL
3
T 2GMT
4 2
sostituendo i valori dati:
rL
3
3
T 2GMT
4 2
3
2.362 1012 6.67 1011 5.97 1024
m
4 2
2.362 6.67 5.97
10
39.44
121124
3
25
m 1.78 10 3 m
1.78 3 10 108 m 3.83 108 m 383000 km
Per l’accelerazione centripeta occorre conoscere la velocità orbitale:
2rL
6.28 3.83 108
6.28 3.83
vo
m/s
1086 m/s
6
T
2.36
2.36 10
10.2 102 m/s 1.02 103 m/s
che inserita fornisce:
2
vo
(1.02 103 )2
1.022
2
aC
m/s
1068 m/s2 2.72 103 m/s2
rL
3.83
3.83 108
48. Per prima cosa calcoliamo il raggio dell’orbita, r R h , ed il periodo in secondi:
r 6.378 106 m 500 km (6.378 106 0.500 106 ) m 6.88 106 m
T (94.6 60) s 5676 s 5.68 103 s
Il numero di giri in un secondo si trova dividendo 1 s per la durata di un giro in secondi, cioè prendendo il reciproco del periodo:
1
1
f
0.170 103 s1 1.70 104 Hz
T
5.88 103 s
9
T
R
W
A
questo numero si dice frequenza e la sua unità di misura, s1 è detta Hertz Hz .
Calcoliamo la velocità orbitale e poi l’accelerazione centripeta:
2r
6.28 6.88 106
6.28 6.88
vo
m/s
1063 m/s 7.61 103 m/s
3
T
5.68
5.68 10
2
vo
(7.61 103 )2
7.612
ac
m/s2
1066 m/s2 8.41 m/s2
6
r
6.88
6.88 10
L’accelerazione dovuta alla gravità terrestre si trova facendo il rapporto fra la forza
gravitazionale e la massa m del satellite:
FG
1
M m
5.97 1024
G T2 6.67 1011
m/s 2
m
m
r
(6.88 106 )2
6.67 5.97
10112412 m/s2 0.841 101 m/s2 8.41 m/s2
6.882
49. Dalla terza legge di Keplero applicata al pianeta Klingon si ricava
un’espressione per la massa M K del pianeta:
r3
42 r 3
G T2
T2
42
Calcoliamo il raggio dell’orbita ed il periodo in secondi:
r RK h 1.00 104 km 7.00 104 km 8.00 107 m
GM K
MK
T (48 3600) s 172800 s 1.728 105 s
Sostituendo: M K
4 2 r 3
4 3.142
8.003 1021
kg
G T2
6.67 1011 1.7282 1010
4 9.86 512
10211110 kg 1013 1021 kg 1.01 1024 kg
6.67 2.986
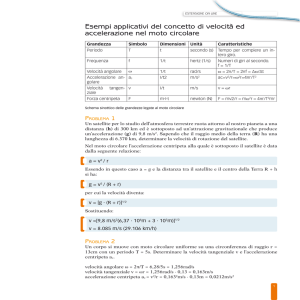
50. Con riferimento alla figura, sulla massa m posta in L1 si ha:
2
vo
MT m
ML m
G
G
m
r
r2
(r r )2
L
Il periodo orbitale deve essere lo stesso della Luna, dal che si ricava la velocità:
2
T
G
GMT
MT
r
2
3
rL
G
2
vo
ML
2
(rL r )
2
2
2r 2 2 r
GMT r 2
GM
3
T
T
rL3
2 rL 2
2
1 G MT r
r
rL3
10
MT
r
3
ML
2
r (rL r )
MT
rL3