Esercizio
Trovare il polinomio di Taylor di terzo grado per la funzione
f (x)=1/(1+x)2 nell’intorno di a = 0. Lo si utilizzi per approssimare
f (0.05). Stimare l’errore assoluto usando la formula del resto di
Lagrange.
Soluzione :
1
2
f
'
(
x
)
(1 x ) 2 ,
(1 x) 3
24
f " ' ( x)
(1 x) 5
f ( x)
f " ( x)
6
(1 x) 4
calcolando le derivate in a = 0, si ha
f (0) = 1 , f (0) = -2 ,
f (0) = 6 , f (0) = 24
pertanto il polinomio di Taylor di ordine 3, nell’intorno di a = 0 è:
P(x) f( 0 ) f'( 0 ) x
f"( 0 ) 2 f"'( 0 ) 3
x
x 1 2 x 3x 2 4 x3
2!
3!
quindi :
P(0.05) 1 2(0.05) 3(0.05) 2 4(0.05) 3 0.907
L’errore assoluto commesso con tale approssimazione è :
E0.05 P(0.05) f (0.05) 0.907 0.90703 0.00003
1
2
Calcolo l’errore assoluto usando la formula del resto di Lagrange :
f ( n 1) ( )
Rn
( x a)n 1
(n 1)!
con (a, x) a 0 x 0.05
f iv ( x) 120(1 x) 6
quindi su x (0,0.05) il massimo valore lo assume in x = 0
quindi il massimo valore della derivata IV° è :
f iv (0) 120(1 0) 6 120
f ( n 1) ( )
120
Rn
( x a) n 1
(0.05 0) 4 3.125 *105
(n 1)!
4!
0.00003125
Il residuo ci dice l’errore assoluto massimo che possiamo
commettere
Il residuo ci dà sempre un valore uguale o maggiore dell’errore
assoluto esatto.
3
Esercizio n°1
Approssimare e 0.1 mediante il polinomio di Taylor di ordine uno,
due e tre nell’intorno di a = 0. Calcolare i corrispondenti errori
assoluti esatti.
Soluzione
Poiché f (x) = f (x) = f (x) = f (x) = e x , risulta :
f (0) = f (0) = f (0) = f (0) = 1
quindi :
P1 ( x) 1 x
P1 (0.1) 1 0.1 1.1
x2
P2 ( x) 1 x
2
(0.1) 2
P2 (0.1) 1 0.1
1.105
2
x2 x3
P3 ( x) 1 x
2
6
(0.1) 2 (0.1) 3
P3 (0.1) 1 0.1
1.10516
2
6
E1 e0.1 P1(0.1) 1.1052 1.1 0.0052
E2 e0.1 P2 (0.1) 1.1052 1.105 0.0002
E3 e0.1 P3 (0.1) 1.1052 1.10516 0.00004
4
Esercizio
Dati tre punti del piano: P0 (0,-2), P1(1,-6) e P2(3,40).
Trovare il polinomio interpolante di Lagrange che passa per essi.
Soluzione :
Il polinomio richiesto sarà un polinomio di secondo grado:
P( x) f ( x0 ) L0 ( x) f ( x1 ) L1 ( x) f ( x2 ) L2 ( x)
2L0 ( x) 6L1 ( x) 40L2 ( x)
Calcoliamo i coefficienti di Lagrange
( x x1 )( x x2 )
( x 1)( x 3) x 2 4 x 3
L0 ( x)
( x0 x1 )( x0 x2 ) (0 1)(0 3)
3
( x x0 )( x x2 )
( x 0)( x 3) x 2 3x
L1 ( x)
( x1 x0 )( x1 x2 ) (1 0)(1 3)
2
( x x0 )( x x1 )
( x 0)( x 1) x 2 x
L2 ( x)
( x2 x0 )( x2 x1 ) (3 0)(3 1)
6
quindi
x 2 4x 3
x 2 3x
x2 x
P( x) 2
6
40
3
2
6
9 x 2 15 x 6
3x 2 5 x 2
3
5
Esercizio
Sia data la seguente tabella:
xk
f (xk)
-1
2
0
0
3
4
7
7
Stimare f (4) usando un polinomio di Lagrange
Soluzione :
Il polinomio interpolatore di Lagrange per x = 4 è :
P(4) 2L0 (4) 4L2 (4) 7 L3 (4)
Calcoliamo i coefficienti di Lagrange
L0 (4)
4(4 3)( 4 7)
3
(1)( 1 3)( 1 7) 8
L2 (4)
(4 1)( 4)( 4 7) 5
(3 1)(3)(3 7) 4
L3 (4)
(4 1)( 4)( 4 3) 5
(7 1)(3)(7 3) 56
quindi
3
5
5 51
P(4) f (4) 2 4 7
6.375
8
4
56 8
6
Esercizio :
Ottenere la retta di regressione che approssimi i punti P1(0,1),
P2(1,3), P3(-1,2), P4(2,4). Determinare l’indice di scostamento
quadratico r 2
Soluzione :
Costruiamo la tabella per facilitare i calcoli, ed aggiungeremo la
colonna dell’errore residuo dell’approssimazione.
xk
0
1
-1
2
-------2
fk
1
3
2
4
-------10
xk2
0
1
1
4
-------6
xxfk
0
3
-2
8
-------9
( p(xk)-fk )2
1.21
0.01
0.49
0.09
-------1.8
7
na xi b yi
x a x b x y
i
2
i
i
i
Si ha quindi il sistema
4a 2b 10
2a 6b 9
che ha come soluzione a = 2.1 e b = 0.8.
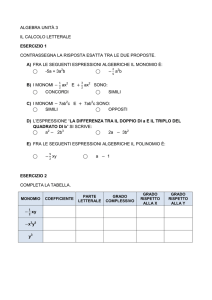
Quindi la retta dei minimi quadrati y = bx + a è :
p(x) = 0.8 x + 2.1
Ora siamo in condizione di riempire l’ultima colonna della tabella.
L’ errore residuo usando la retta di regressione è :
S r ( p( xk ) f k ) 2 1.8
f = 10/4 = 2.5
St ( f k f )2 (1 2.5)2 (3 2.5)2 (2 2.5)2 (4 2.5)2
5
St S r
0.64
St
ciò indica che il 64 % della incertezza nei dati è stata eliminata
usando la regressione.
r2
8
4
3.5
3
2.5
2
1.5
1
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3
Esercizio :
Calcolare la retta dei minimi quadrati per i dati della seguente
tabella:
xk
yk
-1
6
1
1
3
11
Determinare inoltre l’errore residuo St usando la media e l’indice
di scostamento quadratico r 2.
Soluzione :
xk
-1
1
3
-------3
fk
6
1
11
--------18
xk2
1
1
9
--------11
xxfk
-6
1
33
---------28
( p(xk)-fk )2
6.25
25
6.25
---------37.5
9
Sostituendo nelle equazioni normali:
na xi b yi
x a x b x y
i
2
i
i
i
si ha il seguente sistema:
3a 3b 18
3a 11b 28
la cui soluzione è b = 1.25 e a = 4.75
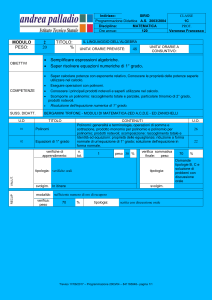
Quindi la retta dei minimi quadrati è: p(x)=1.25 x + 4.75.
Gli errori residui sono :
S r ( p( xk ) f k ) 2 37.5
Calcolo r 2.
f = 18/3 = 6
S t ( f k f ) 2 (6 6) 2 (1 6) 2 (11 6) 2 50
r2
St S r
0.25
St
allora si è avuto un miglioramento del 25 % considerando la retta
di regressione invece della media dei dati.
10
graficamente:
12
10
8
6
4
2
0
-2
-1
0
1
2
3
4
ESEMPIO 2
Approssimare i dati della seguente tabella, usando il metodo dei
minimi quadrati discreti , con un polinomio di 2°grado.
i
xi
yi
1
0.00
1.0000
2
0.25
1.2840
3
0.50
1.6487
4
0.75
2.1170
5
1.00
2.7183
Soluzione
Le equazioni normali sono:
5a0
2.5a1 1.875a2 8.7680
2.5a0
1.876a1 1.5625a2 5.4514
1.875a0 1.5625a1 1.3828a2 4.4015
La soluzione di questo sistema è :
a0 1.0052 a1 0.8641 a2 0.8437
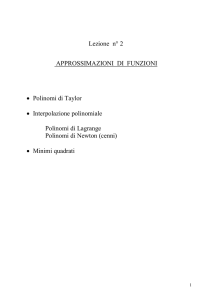
Cioè, il polinomio dei minimi quadrati di grado 2° che approssima
i dati è :
11
P2 ( x) 1.0052 0.8641 x 0.8437 x2
3
2.5
y
2
1.5
1
0.5
0
0
0.25
0.5
x
0.75
1
Per questi valori di xi
otteniamo l’approssimazione mostrata nella seguente tabella.
L’errore totale
y P( x ) 2.76 10
5
i 1
2
i
4
i
è il minimo che si può ottenere usando un polinomio di grado al
più 2°.
i
xi
yi
P(xi)
yi-P(xi)
1
0.00
1.0000
1.0052
-0.0052
2
0.25
1.2840
1.2740
0.0100
3
0.50
1.6487
1.6482
0.0005
4
0.75
2.1170
2.1279
-0.0109
5
1.00
2.7183
2.7130
0.0053
12
ESEMPIO 3
Considerare l’insieme di dati nelle prime tre colonne della
seguente tabella. Se xi è rappresentato in funzione di ln y , i dati
sembrano avere una relazione lineare, così è ragionevole assumere
che y rispetto ad x abbia un andamento esponenziale:
y beax
oppure
ln y ln b ax
Completando la seguente tabella si ottiene :
i
1
2
3
4
5
xi
1.00
1.25
1.50
1.75
2.00
7.50
yi
ln yi
1.629
1.756
1.876
2.008
2.135
9.404
5.10
5.79
6.53
7.45
8.46
xi2
1.0000
1.5625
2.2500
3.0625
4.0000
11.875
xi ln yi
1.629
2.195
2.814
3.514
4.270
14.422
Usando le equazioni normali della retta si ottiene :
a
(5)(14.422) (7.5)(9.404)
(5)(11.875) (7.5)
2
0.5056
e
ln b
(11.875)(9.404) (14.422)(7.5)
(5)(11.875) (7.5)
2
1.122
poichè b e1.122 3.071
13
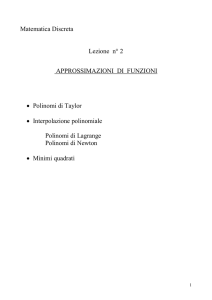
L’approssimazione assume la forma :
y 3.071 e0.5056 x
Verifichiamo graficamente i risultati
i
1
2
3
4
5
xi
3.071e0.5056xi
5.09
5.78
6.56
7.44
8.44
yi
1.00
1.25
1.50
1.75
2.00
5.10
5.79
6.53
7.45
8.46
8.5
8
7.5
7
y
6.5
6
5.5
5
4.5
4
0
0.25
0.5
0.75
1
x
1.25
1.5
1.75
2
y 3.071 e0.5056 x
14
Fare Esercizi :5(d,e) 6
E= bontà dell’approssimazione
15