Matematica Discreta
Lezione n° 2
APPROSSIMAZIONI DI FUNZIONI
Polinomi di Taylor
Interpolazione polinomiale
Polinomi di Lagrange
Polinomi di Newton
Minimi quadrati
1
POLINOMI DI TAYLOR :
APPROSSIMAZIONE NELL’INTORNO DI UN PUNTO
Forniscono un metodo per approssimare il valore di una funzione
in un punto x noti il valore della funzione e delle sue derivate in
un altro punto “vicino” a .
Teorema
Se f e le sue derivate sono continue in un intervallo che contiene
aex
f " (a)
f n (a)
2
f ( x) f (a) f (a)( x a)
( x a) ....
( x a) n ....
2
n!
Serie di Taylor di f (x) per x nelle vicinanze di un punto a
2
RAPPRESENTAZIONE GEOMETRICA DELLE SOMME
PARZIALI DELLA SERIE
f (x )
f ( x) f (a) appross. di ordine 0
T0 ( x)
T0 ( x)
a
f (x )
T1( x)
f ( x) f (a) f (a)( x a)
T1( x)
a
f ( x) f (a) f (a)( x a)
f (a)
( x a) 2
2!
f (x )
T2 ( x)
T2 ( x)
a
3
TEOREMA DI UNICITA’ DEL POLINOMIO DI TAYLOR
Esiste ed è unico il polinomio di grado n che coincide con f (x)
e con le sue n derivate prime in a ed è :
f k (a)
Pn ( x)
( x a) k
k 0 k!
n
(ovvero la serie di Taylor di f (x) troncata al termine di ordine n )
Osservazione :
Per f (x) da polinomi, usando un n° finito di termini, non si ha
una stima esatta. Ogni termine aggiuntivo migliora
l’approssimazione.
La decisione di quanti termini dell’espansione tenere dipende
dall’errore che vogliamo commettere :
Rn ( x) f ( x) Tn ( x)
Forma di Lagrange dell’errore (resto, residuo)
f n 1 ( )
Rn ( x)
( x a) n 1
(n 1)!
,
ξ (a,x)
4
Svantaggi :
1) non si conosce con esattezza ma si sa che è compreso tra a
ex
2) Per valutare l’espressione del residuo si richiede di valutare
la derivata (n+1) – esima.
Rn ( x) O(h n 1 )
ci dice come varia l’errore al variare di h
( h = distanza dal punto in cui sono
concentrate le informazioni)
In generale l’errore di troncamento diminuisce aggiungendo
termini della serie. In molti casi, se h è sufficientemente piccolo, i
termini del 1° e 2° ordine influiscono più di quelli successivi
sull’errore relativo ovvero dal 3° in poi sono trascurabili.
Esercizio
Trovare il polinomio di Taylor di terzo grado per la funzione
f (x)=1/(1+x)2 nell’intorno di a = 0. Lo si utilizzi per approssimare
f (0.05). Stimare l’errore assoluto usando la formula del resto di
Lagrange.
Soluzione :
1
2
f
'
(
x
)
(1 x ) 2 ,
(1 x) 3
24
f " ' ( x)
(1 x) 5
f ( x)
f " ( x)
6
(1 x) 4
5
calcolando le derivate in a = 0, si ha
f (0) = 1 , f (0) = -2 ,
f (0) = 6 , f (0) = 24
pertanto il polinomio di Taylor di ordine 3, nell’intorno di a = 0 è:
P(x) f( 0 ) f'( 0 ) x
f"( 0 ) 2 f"'( 0 ) 3
x
x 1 2 x 3x 2 4 x3
2!
3!
quindi :
P(0.05) 1 2(0.05) 3(0.05) 2 4(0.05) 3 0.907
L’errore assoluto commesso con tale approssimazione è :
E0.05 P(0.05) f (0.05) 0.907 0.90703 0.00003
6
Calcolo l’errore assoluto usando la formula del resto di Lagrange :
f ( n 1) ( )
Rn
( x a)n 1
(n 1)!
con (a, x) a 0 x 0.05
f iv ( x) 120(1 x) 6
quindi su x (0,0.05) il massimo valore lo assume in x = 0
quindi il massimo valore della derivata IV° è :
f iv (0) 120(1 0) 6 120
f ( n 1) ( )
120
Rn
( x a) n 1
(0.05 0) 4 3.125 *105
(n 1)!
4!
0.00003125
Il residuo ci dice l’errore assoluto massimo che possiamo
commettere
Il residuo ci dà sempre un valore uguale o maggiore dell’errore
assoluto esatto.
7
Esercizio n°1
Approssimare e 0.1 mediante il polinomio di Taylor di ordine uno,
due e tre nell’intorno di a = 0. Calcolare i corrispondenti errori
assoluti esatti.
Soluzione
Poiché f (x) = f (x) = f (x) = f (x) = e x , risulta :
f (0) = f (0) = f (0) = f (0) = 1
quindi :
P1 ( x) 1 x
P1 (0.1) 1 0.1 1.1
x2
P2 ( x) 1 x
2
(0.1) 2
P2 (0.1) 1 0.1
1.105
2
x2 x3
P3 ( x) 1 x
2
6
(0.1) 2 (0.1) 3
P3 (0.1) 1 0.1
1.10516
2
6
E1 e0.1 P1(0.1) 1.1052 1.1 0.0052
E2 e0.1 P2 (0.1) 1.1052 1.105 0.0002
E3 e0.1 P3 (0.1) 1.1052 1.10516 0.00004
8
APPROSSIMAZIONE DI FUNZIONI SU UN INTERVALLO
Approssimare una funzione f (x)
a)Conosciamo f (x) solo in alcuni punti
(xi , yi ) i = 1..n MODELLO
nodi
b)Conosciamo l’espressione analitica di f (x) ma la vogliamo
sostituire con una più semplice.
Fra quali classi di funzioni si cerca la funzione approssimante ?
1) Polinomi algebrici di grado n
Pn f n ( x) a0 a1x .... an x n
( n+1 parametri )
2) Polinomi trigonometrici di grado n e frequenza
n
Tn ( ) f n ( x) a0 (ak cos kx bk sin kx)
k 1
( per funzioni periodiche 2n+1 parametri )
1) Funzioni razionali
Rn , d f n ( x) a0 Pn ( x) / Pd ( x) , Pn ( x) Pn , Pd ( x) Pd
( per funzioni con singolarità, n + d +1 parametri )
2) Somme esponenziali di ordine n
9
n
En f n ( x) ak e bk x
k 1
( per approssimare fenomeni esponenziali, 2n parametri )
etc.
Supponiamo di voler approssimare f(x) con polinomi. Come
scegliamo il polinomio Pn (x) Rn opportuno che approssima
f(x)?
Supponiamo di conoscere (xi , yi ) i = 0..m dove yi = f (xi )
a_ Interpolazione
Pn tale che Pn (xi) = yi i = 1 … n
ha senso quando { yi } sono accurati
b_ Minimi quadrati
(caso discreto)
P ( x ) y
m
Pn tale che
i 0
i
n
i
i
2
sia minima
i pesi possono essere =1.
i
10
INTERPOLAZIONE POLINOMIALE
Problema: trovare il polinomio di grado minimo che passa per i
punti assegnati.
(xi , yi ) i = 0,1..n
yi = f (xi )
xi xj se i j
Pn ( x) a0 a1x .... an x n
Imponendo il passaggio per i punti (xi , yi ) si ha :
a0 a1 x0 ... an x0n y0
1 x0 ... x0n a0 y0
n
n
1 x1 ... x1 a1 y1
a0 a1 x1 ... an x1 y1
...
...
......................................
................
1 x ... x n a y
a0 a1 xn ... an xnn yn
n
n n
n
matrice di VANDERMONDE det 0
E’ un problema mal condizionato ma se det 0 il polinomio Pn (x)
che risolve il problema esiste ed è unico.
11
FORMULA D’INTERPOLAZIONE DI LAGRANGE
(xi , yi ) i = 0 .... n
n
(x x )
Lj
i
0 se k j1
L j ( x) n
( x j xi ) 1 se k j
i 0
i j
i 0
i j
x j 1
L
j
xj
x j 1
, j 0 , 1 , ... , n POLINOMI DI LAGRANGE
Lj sono linearmete indipenden ti
Costituisono una base per i polinomi di grado n
n
Pn ( x) a j L j ( x)
j 0
n
E si dimostra che: Pn ( x) y j L j ( x)
ovvero aj=yj
j 0
12
Esercizio
Dati tre punti del piano: P0 (0,-2), P1(1,-6) e P2(3,40).
Trovare il polinomio interpolante di Lagrange che passa per essi.
Soluzione :
Il polinomio richiesto sarà un polinomio di secondo grado:
P( x) f ( x0 ) L0 ( x) f ( x1 ) L1 ( x) f ( x2 ) L2 ( x)
2L0 ( x) 6L1 ( x) 40L2 ( x)
Calcoliamo i coefficienti di Lagrange
( x x1 )( x x2 )
( x 1)( x 3) x 2 4 x 3
L0 ( x)
( x0 x1 )( x0 x2 ) (0 1)(0 3)
3
( x x0 )( x x2 )
( x 0)( x 3) x 2 3x
L1 ( x)
( x1 x0 )( x1 x2 ) (1 0)(1 3)
2
( x x0 )( x x1 )
( x 0)( x 1) x 2 x
L2 ( x)
( x2 x0 )( x2 x1 ) (3 0)(3 1)
6
quindi
x 2 4x 3
x 2 3x
x2 x
P( x) 2
6
40
3
2
6
9 x 2 15 x 6
3x 2 5 x 2
3
13
Esercizio
Sia data la seguente tabella:
xk
f (xk)
-1
2
0
0
3
4
7
7
Stimare f (4) usando un polinomio di Lagrange
Soluzione :
Il polinomio interpolatore di Lagrange per x = 4 è :
P(4) 2L0 (4) 4L2 (4) 7 L3 (4)
Calcoliamo i coefficienti di Lagrange
L0 (4)
4(4 3)( 4 7)
3
(1)( 1 3)( 1 7) 8
L2 (4)
(4 1)( 4)( 4 7) 5
(3 1)(3)(3 7) 4
L3 (4)
(4 1)( 4)( 4 3) 5
(7 1)(3)(7 3) 56
quindi
3
5
5 51
P(4) f (4) 2 4 7
6.375
8
4
56 8
14
ERRORE COMMESSO CON LAGRANGE
Teorema
Siano x0, x1, ...xn n +1 punti in [a,b] e f C n+1 [a,b],
allora (x) in (a,b) tale che :
f ( n 1) ( ( x))
f ( x) Pn ( x)
( x x0 )...( x xn )
(n 1)!
dove P(x) è il polinomio di Lagrange di grado al più n,
interpolante f (x) in x0, x1, ...xn
N.B. L’interpolazione di Lagrange non richiede che i punti siano
equidistanti.
15
Osservazione :
E’ simile alla formula dell’errore di Taylor ((x-x0)n+1)
Osservazione :
Per calcolare l’errore usando la suddetta formula bisogna
conoscere la derivata (n+1) - esima o almeno una sua
maggiorazione M
f ( x) Pn ( x)
M
max
[ x0 , xn ]
M
( x x0 )( x x1 )...( x xn )
(n 1)!
f n 1( )
Pn
y0
x0
x1
x2
xn
16
FORMULA DI NEWTON ALLE DIFFERENZE DIVISE
Permette di aumentare l’ordine del polinomio interpolante
includendo più punti, senza dover ripetere tutti i calcoli .
(a differenza di Lagrange)
DIFFERENZE DIVISE
{x0 , …. , xn } n+1 nodi
{f(x0 ), …. ,f( xn )}
f x0 , x1
f ( x1 ) f ( x0 )
x1 x0
differenza divisa di ordine 1
f x0 , x1, x2
f x1, x2 f x0 , x1
x2 x0
f x0 ,..., xn
f x1 ,..., xn 1 f x0 ,..., xn
xn 1 x0
differenza divisa di ordine 2
diff. divisa di ordine n
Proprietà :
f x0 ,..., xn è una funzione invariante a permutazioni cioè
f x0 ,..., xn f xi 0 , xi1..., xin
i0 , i1,..., xn
permutazio ne di 0,..., n
17
FORMULA D’INTERPOLAZIONE DI NEWTON ALLE
DIFFERENZE DIVISE
f x , x
0
1
f(x ) f(x )
x x
1
0
1
0
P(x) f(x ) (x x )f x ,x
1
0
f x , x , x
0
1
2
0
0
1
f x , x f x , x
x x
1
2
0
2
1
0
P (x) f(x ) (x x )f x , x (x x )(x x )f x , x , x
2
0
0
0
1
P (x) (x x )(x x )f x , x , x
1
0
1
0
1
2
0
1
0
1
2
f ( x0 ), f x0 , x1 ,.... sono i coeff. del polinomio interpolan te
Considerando un polinomio di grado n generico:
Pn ( x) f ( x0 ) ( x x0 ) f x0 , x1 ( x x0 )( x x1 ) f x0 , x1 , x2 ...
... ( x x0 )( x x1 ).....( x xn 1 ) f x0 ...xn
Pn 1( x) Pn ( x) ( x x0 )( x x1).....( x xn ) f x0 ...xn 1
En ( x) ( x x0 )( x x1 ).....(x xn ) f x0 ...xn1
18
Teorema
Supponiamo che f C [a, b] e x ,..., x siano numeri distinti in
[a,b]. Allora esiste un numero in (a,b) tale che
f ( )
f [ x ,..., x ]
n!
n
0
n
(n)
0
n
COSTRUZIONE DELLE DIFFERENZE DIVISE
x0
f ( x0 )
x1
f ( x1)
f x0 , x1
x2
f ( x2 )
f x1, x2
f x0 , x1, x2
x3
f ( x3 )
f x2 , x3
f x1 , x2 , x3
f x0, x1 , x2 , x3
dove
f x1, x2 , x3
f x2 , x3 f x1, x2
x3 x1
f x1 , x2 , x3 f x0 , x1 , x2
f x0 , x1 , x2 , x3
x3 x0
19
Esempio
Calcolare il polinomio interpolante i punti della seguente tabella
usando il metodo delle differenze divise di Newton:
xk
fk
0
1
1
2
3
3
fk
1
2
3
f [xk,x k+1]
f [xk,x k+2,x k+2]
1
1/2
-1/6
Soluzione :
xk
0
1
3
Calcolati nel seguente modo:
f x0 , x1
f ( x1 ) f ( x0 ) 2 1
1
x1 x0
1 0
f x1 , x 2
f ( x 2 ) f ( x1 ) 3 2 1
x 2 x1
3 1 2
1
1
f x1 , x 2 f x0 , x1 2
1
f x0 , x1 , x 2
x 2 x0
30
6
quindi il polinomio interpolatore sarà :
1
7
1
P( x) 1 1 ( x 0) ( x 0)( x 1) x 2 x 1
6
6
6
20
Esempio
Sia data la seguente tabella di valori
xk
fk
3.2
22.0
2.7
17.8
1
14.2
a) Mediante il metodo delle differenze divise ottenere il polinomio
interpolatore per i dati della tabella
b) Se si aggiunge il punto (4.8 ; 38.3) alla precedente tabella, come
sarà il nuovo polinomio interpolatore?
Soluzione :
a) Costruiamo la tabella delle differenze divise:
xk
x0 =3.2
x1 =2.7
x2 =1
x3 =4.8
fk
22.0
17.8
14.2
38.3
f [xk,x k+1] f [xk,x k+1,x k+2] f [xk,x k+1,x k+2,xk+3]
8.4
2.118
6.342
2.855 f[x0,x1,x2]
2.011 f[x1,x2,x3] -0.528
N.B. x0,x1,x2,x3 non sono necessariamente in ordine crescente
e non sono necessariamente equidistanti.
Ottenuta come segue:
21
f x0 , x1
f ( x1 ) f ( x0 ) 17.8 22.0
8.4
x1 x0
2.7 3.2
f x1 , x 2
f ( x 2 ) f ( x1 ) 14.2 17.8
2.118
x 2 x1
1 2.7
f x0 , x1 , x 2
f x1 , x 2 f x0 , x1 2.118 8.4
2.855
x 2 x0
1 3.2
il polinomio è quindi :
P2 ( x) 22 8.4( x 3.2) 2.855( x 3.2)( x 2.7)
f x2 , x3 f x1 , x2 6.342 2.118
f x1 , x2 , x3
2.011
x3 x1
4.8 2.7
b) Aggiungendo un nuovo dato alla tabella, non è necessario rifare
i calcoli, basta calcolare :
f x2 , x3 , f x1 , x2 , x3 , f x0 , x1 , x2 , x3 :
f x 2 , x3
f ( x3 ) f ( x 2 ) 38.3 14.2
6.342
x3 x 2
4.8 1
f x0 , x1, x2 , x3
0.528
f x1, x2 , x3 f x0 , x1, x2 2.011 2.2855
x3 x0
4.8 3.2
quindi :
22
P3 ( x) 22 8.4( x 3.2) 2.855( x 3.2)( x 2.7)
(0.528)( x 3.2)( x 2.7)( x 1)
NOTA:
Dati n+1 punti esiste un solo polinomio di grado al più n che li
interpola , tale polinomio lo si può calcolare usando Lagrange o
Newton: ovvero i polinomi calcolati con Lagrange o con Newton
sono uguali.
TEOREMA DI WEIERSTRASS
f ( x) C a, b
pn ( x)
succession e di polinomi tali che
lim f ( x) Pn ( x) 0
n
Sfortunatamente questo risultato in generale non risulta valido
quando pn(x) viene definito da un processo d’interpolazione.
In generale aumentando il n° di punti da interpolare aumenta il
grado del polinomio e quindi le oscillazioni (fenomeno di Runge)
23
METODO DEI MINIMI QUADRATI DISCRETO
L’interpolazione non è sempre il miglior modo di approssimare
una serie di dati ed il loro andamento sottostante soprattutto se
i dati considerati sono affetti da errori .
Una strategia più appropriata per tali casi consiste nel trovare una
funzione che approssimi la tendenza generale dei dati senza
necessariamente passare per ciascuno di essi.
Supponiamo che l’andamento sembri rettilineo e li si voglia
approssimare con una retta
Un modo per determinare la retta è quello di ispezionare
visivamente i dati e quindi tracciare la retta che “meglio li
attraversa”. Ovviamente un simile metodo è piuttosto arbitrario
cioè diversi analisti potrebbero tracciare rette con pendenze
diverse. Per evitare ciò si deve stabilire un criterio con cui trovare
una sola approssimazione.
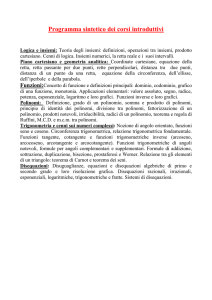
REGRESSIONE LINEARE
Sia dato un insieme di punti (x1,y1) , (x2,y2) , ...., (xn,yn) ,
4
3.5
3
2.5
2
1.5
1
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3
24
l’espressione matematica della retta generica è :
yr ( x) bx a
l’errore commesso in un punto (xi,yi) è
ei yi yr ( xi ) yi bxi a
Una strategia per determinare i coefficienti a e b consiste nel
minimizzare la somma dei quadrati degli errori:
n
n
2
Sr e yi a bxi
i 1
2
i
i 1
Questo criterio fornisce un’unica linea retta per un insieme di
punti dato.
Per determinare i valori di a e b, si deve imporre l’uguaglianza a
zero delle derivate parziali rispetto ad a e b:
S r
2 ( yi a bxi )
a
S r
2 (( yi a bxi ) xi )
b
La sommatoria è intesa per i =1 .. n.
0 yi a bxi
25
0 yi xi axi bxi2
poiché
a na
si possono riscrivere le due equazioni precedenti come segue:
x b na y
x b x a x y
i
i
2
i
i
i
i
Queste ultime prendono il nome di equazioni normali della retta.
QUANTIFICAZIONE DELL’ERRORE
La bontà dell’approssimazione è misurata tramite la somma dei
quadrati degli errori residui ovvero Sr
n
Sr
i 1
ei2
n
2
yi a bxi
i 1
Errore residuo usando retta
di regressione
o bontà dell’approssimazione
26
Sr è in generale diverso da zero e misura la dispersione dei dati
intorno alla retta di regressione.
Consideriamo ora la dispersione dei dati intorno alla loro media:
y
y
i
n
n
S t ( yi y) 2
i 1
Errore residuo usando la media
La differenza St - Sr quantifica la riduzione dell’errore dovuto al
fatto che si approssimano i dati con una linea non perfettamente
orizzontale quale è la media.
Per rendere la quantità Sr indipendente dalla scala la si normalizza
usando St e si ottiene:
S Sr
r t
St
2
r
St S r
St
Indice di scostamento quadratico
o coefficiente di determinazione
oppure
Indice di scostamento o
Coefficiente di correlazione
Quando Sr = 0 r = r 2= 1 l’approssimazione usando la retta di
regressione è perfetta.
27
Ovviamente deve essere S t S r affinché abbia senso calcolare la
retta di regressione e quindi r, sia per motivi analitici, sia poiché
ciò implica che la dispersione intorno alla retta della media è
maggiore della dispersione intorno alla retta dei minimi quadrati.
28
Esercizio :
Ottenere la retta di regressione che approssimi i punti P1(0,1),
P2(1,3), P3(-1,2), P4(2,4). Determinare l’indice di scostamento
quadratico r 2
Soluzione :
Costruiamo la tabella per facilitare i calcoli, ed aggiungeremo la
colonna dell’errore residuo dell’approssimazione.
xk
0
1
-1
2
-------2
xk2
0
1
1
4
-------6
fk
1
3
2
4
-------10
xxfk
0
3
-2
8
-------9
( p(xk)-fk )2
1.21
0.01
0.49
0.09
-------1.8
na xi b yi
x a x b x y
i
2
i
i
i
Si ha quindi il sistema
4a 2b 10
2a 6b 9
29
che ha come soluzione a = 2.1 e b = 0.8.
Quindi la retta dei minimi quadrati y = bx + a è :
p(x) = 0.8 x + 2.1
Ora siamo in condizione di riempire l’ultima colonna della tabella.
L’ errore residuo usando la retta di regressione è :
S r ( p( xk ) f k ) 2 1.8
f = 10/4 = 2.5
St ( f k f )2 (1 2.5)2 (3 2.5)2 (2 2.5)2 (4 2.5)2
5
St S r
0.64
St
ciò indica che il 64 % della incertezza nei dati è stata eliminata
usando la regressione.
r2
4
3.5
3
2.5
2
1.5
1
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3
30
Esercizio :
Calcolare la retta dei minimi quadrati per i dati della seguente
tabella:
xk
yk
-1
6
1
1
3
11
Determinare inoltre l’errore residuo St usando la media e l’indice
di scostamento quadratico r 2.
Soluzione :
xk
-1
1
3
-------3
xk2
1
1
9
--------11
fk
6
1
11
--------18
xxfk
-6
1
33
---------28
( p(xk)-fk )2
6.25
25
6.25
---------37.5
Sostituendo nelle equazioni normali:
na xi b yi
x a x b x y
i
2
i
i
i
si ha il seguente sistema:
31
3a 3b 18
3a 11b 28
la cui soluzione è b = 1.25 e a = 4.75
Quindi la retta dei minimi quadrati è: p(x)=1.25 x + 4.75.
Gli errori residui sono :
S r ( p( xk ) f k ) 2 37.5
Calcolo r 2.
f = 18/3 = 6
S t ( f k f ) 2 (6 6) 2 (1 6) 2 (11 6) 2 50
r2
St S r
0.25
St
allora si è avuto un miglioramento del 25 % considerando la retta
di regressione invece della media dei dati.
graficamente:
12
10
8
6
4
2
0
-2
32
-1
0
1
2
3
4
PARABOLA DEI MINIMI QUADRATI
2
Si vuole trovare la parabola y a0 a1x a2 x
che approssima una serie di punti ( xi ; yi ) affinché sia minimo il
valore di :
a0 a1xi a2 xi
n
2
i 1
yi
2
Imponendo la condizione di minimo si ottiene :
n
n
n
i 1
i 1
i 1
2
y
a
n
a
x
a
x
i 0
1 i
2 i
n
n
n
i 1
i 1
i 1
xi yi a0 xi a1 xi
n
xi
i 1
2
n
2
n
n
a2 xi 3
i 1
n
yi a0 xi a1 xi a2 xi 4
i 1
2
3
i 1
i 1
a partire dalle quali si calcolano a0 , a1, a2
y a0 a1x a2 x 2
yi
xj
r si calcola come per la retta
33
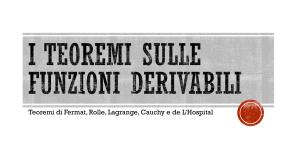
ESEMPIO 2
Approssimare i dati della seguente tabella, usando il metodo dei
minimi quadrati discreti , con un polinomio di 2°grado.
i
xi
yi
1
0.00
1.0000
2
0.25
1.2840
3
4
0.50
1.6487
0.75
2.1170
5
1.00
2.7183
Soluzione
Le equazioni normali sono:
5a0
2.5a1 1.875a2 8.7680
2.5a0
1.876a1 1.5625a2 5.4514
1.875a0 1.5625a1 1.3828a2 4.4015
La soluzione di questo sistema è :
a0 1.0052 a1 0.8641 a2 0.8437
Cioè, il polinomio dei minimi quadrati di grado 2° che approssima
i dati è :
P2 ( x) 1.0052 0.8641 x 0.8437 x2
3
2.5
y
2
1.5
1
0.5
0
0
0.25
0.5
x
0.75
1
34
Per questi valori di xi otteniamo l’approssimazione mostrata nella
seguente tabella. L’errore totale
yi P( xi )2 2.76 104
5
i 1
è il minimo che si può ottenere usando un polinomio di grado al
più 2°.
i
xi
yi
P(xi)
yi-P(xi)
1
0.00
1.0000
1.0052
-0.0052
2
0.25
1.2840
1.2740
0.0100
3
0.50
1.6487
1.6482
0.0005
4
0.75
2.1170
2.1279
-0.0109
5
1.00
2.7183
2.7130
0.0053
35
APPROSSIMAZIONE CON FUNZIONI ESPONENZIALI
O LOGARITMICHE RISOLTE USANDO LE EQUAZIONI
NORMALI DELLA RETTA: funzioni linearizzabili
y a xb
1_ TIPO POTENZA
per scoprire se questo è l’andamento rappresentare graficamente
log(y) rispetto a log(x) e vedere se è una retta
log y log a xb log a log xb log a b log x
cambiando le variabili
Y log y
A log a
X logx
si ha :
Y A b X
36
y a bx
2_ TIPO ESPONENZIALE
per scoprire se questo è l’andamento rappresentare graficamente
log(y) rispetto a x e vedere se è una retta
log y log a b x log a x log b
cambiando le variabili
Y log y
A log a
B log b
si ha :
Y A B x
ESEMPIO 3
Considerare l’insieme di dati nelle prime tre colonne della
seguente tabella. Se xi è rappresentato in funzione di ln y , i dati
sembrano avere una relazione lineare, così è ragionevole assumere
che y rispetto ad x abbia un andamento esponenziale:
y beax
oppure
ln y ln b ax
Completando la seguente tabella si ottiene :
i
1
2
3
4
xi
1.00
1.25
1.50
1.75
yi
5.10
5.79
6.53
7.45
ln yi
1.629
1.756
1.876
2.008
xi2
1.0000
1.5625
2.2500
3.0625
xi ln yi
1.629
2.195
2.814
3.514
37
5
2.00
7.50
8.46
2.135
9.404
4.0000
11.875
4.270
14.422
Usando le equazioni normali della retta si ottiene :
a
(5)(14.422) (7.5)(9.404)
(5)(11.875) (7.5)
2
0.5056
e
ln b
(11.875)(9.404) (14.422)(7.5)
(5)(11.875) (7.5)
2
1.122
poichè b e1.122 3.071
L’approssimazione assume la forma :
y 3.071 e0.5056 x
Verifichiamo graficamente i risultati
i
1
2
3
4
5
xi
1.00
1.25
1.50
1.75
2.00
yi
5.10
5.79
6.53
7.45
8.46
3.071e0.5056xi
5.09
5.78
6.56
7.44
8.44
38
8.5
8
7.5
7
y
6.5
6
5.5
5
4.5
4
0
0.25
0.5
0.75
1
x
1.25
1.5
1.75
2
y 3.071 e0.5056 x
39
Fare Esercizi :5(d,e) 6
E= bontà dell’approssimazione
40