Regioni di funzionamento
1. Introduzione
Il controllo del PMSM è strettamente legato alle caratteristiche tecniche del
motore stesso (valori nominali di tensione, corrente, velocità) e dell’inverter che
viene utilizzato per pilotarlo (tensione di bus, corrente che gli switch sono in grado di
sostenere). Tutti questi parametri definiscono dei limiti che devono essere soddisfatti
contemporaneamente. Inoltre anche il funzionamento ad alta velocità può introdurre
delle restrizioni (non soltanto meccaniche) in quanto le forze controelettromotrici che
si manifestano negli avvolgimenti di statore sono proporzionali alla velocità di
rotazione e pertanto possono superare i valori sostenibili (dati di targa) sia della
macchina che dello stadio di potenza.
Le strategie di controllo del PMSM si adattano quindi a tali restrizioni e di volta
in volta adeguano il loro comportamento alla particolare condizione di lavoro.
Vengono definite in questo modo delle regioni di funzionamento ognuna delle quali
permette determinate prestazioni (in termini di coppia e di velocità)
dell’azionamento.
2. Limiti nominali
Consideriamo inizialmente il caso generale per un motore PMSM qualsiasi, per poi
andare ad analizzare in dettaglio il caso di motore isotropo ( Lq = Ld ) e anisotropo
( Lq ≠ Ld ).
Con riferimento alle seguenti equazioni dinamiche del modello del PMSM, si
possono ricavare le seguenti equazioni a regime:
U d = RId − Ω me Lq Iq
U q = RIq + Ωme Ld Id + Ωme Λ mg
3
T = p Λ mg Iq + (Ld − Lq )Id Iq
2
[
]
(2.1.a)
(2.1.b)
Un’ipotesi semplificativa è di supporre molto piccole le resistenze degli
avvolgimenti in modo tale da poter trascurare le relative cadute di tensione. Con
questa supposizione le (2.1) diventano:
U d = −Ω me Lq Iq
U q = Ωme Ld Id + Ωem Λ mg
3
T = p Λ mg Iq + (Ld − Lq )Id Iq
2
[
(2.2.a)
]
(2.2.b)
1
Cap. 4 - Regioni di funzionamento
Nelle (2.2) sia le tensioni che le correnti devono assumere dei valori che
rientrino nel campo dei valori nominali. Tali restrizioni individuano delle regioni di
funzionamento ben precise; poiché tutti i limiti devono essere soddisfatti
contemporaneamente, l’insieme dei valori ammissibili per il PMSM durante il
funzionamento a regime è ottenuto dall’intersezione di tali regioni.
Per quanto riguarda il limite di corrente, esso è individuato dal massimo modulo
(del vettore spaziale) della corrente (valore nominale IN ) sopportabile a regime dal
motore.
I = Id2 + Iq2 ≤ IN
(2.3)
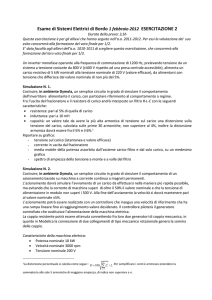
Come riportato in Fig.1, tale condizione individua nel piano delle correnti Id , Iq
una regione circolare (limite di corrente), di raggio pari a IN , centrata nell’origine.
Fig.1 – Limiti di corrente e di tensione
Analogamente il modulo del vettore spaziale della tensione non può superare il
valore nominale U N il quale dipende dalla massima tensione alla quale
l’azionamento può funzionare a causa dei limiti dell’inverter o del motore.
U = U d2 + U q2 ≤ U N
(2.4)
Sostituendo le (2.2) nella (2.4) si ottiene:
2
2
Λ mg Ld 2
UN2
Id +
+ Iq ≤ 2 2
Ld L q
Ωem L d
(2.5)
La (2.5), dipendendo dalla velocità di rotazione Ωme , descrive nel piano delle
correnti Id , Iq una famiglia di ellissi (di cui una è riportata in Fig. 1) aventi centro C,
2
Cap. 4 - Regioni di funzionamento
semiasse maggiore r ed eccentricità ξ (rapporto tra le lunghezze dell’asse maggiore e
dell’asse minore) rispettivamente di:
Λ mg
,0
C = −
Ld
(2.6)
UN
Ω me Ld
(2.7)
r=
ξ=
Lq
Ld
(2.8)
Il parametro ξ viene anche detto fattore (o rapporto) di salienza.
Le cadute di tensione sulle resistenze di fase (che sono state trascurate) incidono
solamente sui limiti di tensione. Tali limiti restringono la regione di funzionamento
alle alte velocità dove però prevale la parte induttiva dell’impedenza del motore.
Questa considerazione permette di giustificare ulteriormente la semplificazione
introdotta nelle (2.2.a).
3 Macchina isotropa
Nel caso di macchina isotropa le induttanze relative all’asse d e all’asse q sono
uguali ( Ld = Lq = L , ξ = 1) e quindi le equazioni (2.2) diventano:
U d = −Ω me LI q
U = Ω LI + Ω Λ
me d
me mg
q
T=
3
pΛ mg Iq
2
(3.1.a)
(3.1.b)
La (2.5) rappresenta pertanto una famiglia di circonferenze con centro in
−Λ mg
,0 e raggio proporzionale al rapporto tra la tensione applicata e la velocità di
L
rotazione; il centro delle circonferenze può essere sia interno che esterno alle curva
limite di corrente.
Le curve a coppia costante sono, nel piano Id , Iq , delle rette parallele all’asse d:
Iq =
T
3
pΛ mg
2
(3.2)
Poiché la coppia dipende solamente da Iq è conveniente lavorare con Id = 0
(Fig.2 e 3, riferite al modello normalizzato come in tutte le figure analoghe seguenti)
ottenendo così coppia massima a parità di modulo di corrente. In questo modo il
3
Cap. 4 - Regioni di funzionamento
sistema di controllo (ad orientamento di campo) opera nella regione detta a coppia
disponibile costante, caratterizzata dalle equazioni:
U d = −Ωme LIq
U q = Ωme Λ mg
3
T = pΛ mg Iq
2
(3.3.a)
(3.3.b)
Fig.2 - Diagramma circolare per un PMSM isotropo (SPMa);
Punti di lavoro nella regione a coppia disponibile costante (Λ mg L > IN )
Fig. 3 - Diagramma circolare per un PMSM isotropo (SPMb);
Punti di lavoro nella regione a coppia disponibile costante (Λ mg L < IN )
A parità di coppia, la velocità risulta proporzionale al modulo della tensione
applicata (3.3) e raggiunge il valore nominale, detto velocità base dell’azionamento,
in corrispondenza alla tensione nominale; con un opportuno progetto del motore è
possibile fare intersecare le curve limiti nominali di tensione (alla velocità nominale)
4
Cap. 4 - Regioni di funzionamento
e di corrente sull’asse Iq (punto B delle Fig.2 e 3, corrispondente alle grandezze base
nel modello normalizzato) garantendo così la coppia nominale fino alla velocità
nominale.
Per vedere quanto vale la velocità di base ΩB basta considerare il triangolo AOB
(Fig.4):
Fig.4 – Triangolo AOB che ci permette di determinare il valore di ΩB ;
Λ mg
U N2
2
=
I
+
N
Ω2B L2
L
2
da cui si ricava:
UN
ΩB =
2 2
L IN + Λ2mg
(3.4)
Distinguiamo quindi due casi:
Ωme < ΩB
Il raggio sarà più grande rispetto a quello che genera la circonferenza
limite di tensione e quindi esterno al limite. In questa condizione, il
motore eroga massima coppia che distingue la zona a coppia costante.
La regione a coppia disponibile costante è quindi caratterizzata dalla
corrente Id nulla, da Iq compresa tra −IN e IN , e dalla tensione
variabile proporzionalmente alla velocità fino al valore U N , che è
raggiunto alla velocità nominale Ωme,N .
A velocità nulla la corrente è detta corrente di stallo, come la coppia che si
chiama coppia di stallo.
Ωme > ΩB
Il raggio è inferiore al limite, quindi non si può più lavorare nella zona
a coppia costante e siamo costretti a ridurre la massima coppia
possibile, lavoriamo nella zona a potenza apparente costante.
5
Cap. 4 - Regioni di funzionamento
Per aumentare la velocità del motore oltre il valore nominale, non potendo
incrementare la tensione (valore limite), si opera “in deflussaggio”. Al crescere della
velocità ω me → diminuisce l’ampiezza delle circonferenze limiti di tensione e quindi
il punto di lavoro ottimale (massima coppia rispetto alla corrente utilizzata) si sposta
nel piano Id , Iq corrispondentemente a valori di Id non più nulli e tali per cui si
genera una componente di flusso che si oppone a quella prodotta dal magnete
permanente. In questo modo si ottiene un risultato analogo a quello che si ha in una
macchina a corrente continua quando si diminuisce la corrente di eccitazione.
Devono essere considerati due casi.
1) Il centro dei cerchi limiti di tensione è esterno al limite di corrente.
Λ
In questa situazione ( mg = IN ) il punto che descrive il maggior rapporto
L
coppia/corrente (a parità di tensione) rimane sulla circonferenza limite di corrente
(Fig.5) e giace sull’intersezione con la circonferenza limite di tensione
corrispondente alla velocità di rotazione (regione a potenza apparente costante). Tale
velocità può raggiungere il massimo valore teorico:
UN
Ωme,max L
Ωme,max =
+ IN =
Λ mg
L
UN
Λ mg − LIN
(3.5)
in corrispondenza del quale il cerchio limite di corrente è tangente al cerchio limite
di tensione in un punto che si trova sull’asse Id (e a cui corrisponde coppia e potenza
disponibile nulle).
Fig. 5 - Diagramma circolare per un PMSM isotropo (SPMa)
Punti di lavoro in deflussaggio (Λ mg L > IN )
6
Cap. 4 - Regioni di funzionamento
Gli andamenti della coppia, della tensione e delle correnti ( Id , Iq e del modulo I)
per una macchina isotropa con il centro dei cerchi limiti di tensione esterno al
cerchio limite di corrente sono rappresentati nelle Fig.6 e 7.
T
B
Ω em
U
B
Ω em
Fig.6 - PMSM isotropo (SPMa), (Λ mg L > IN ), Coppia T e tensione U
Id
B
Iq
B
Iq
Id
Ω em
I
B
Ω em
Fig. 7 - PMSM isotropo (SPMa), (Λ mg L > IN ), Correnti Id , Iq e I (modulo)
Raggiunta la velocità base, la tensione rimane costante e pari al valore nominale
mentre la coppia diminuisce raggiungendo il valore nullo quando la velocità assume
il valore massimo; il modulo di corrente I rimane costante al diminuire di Iq (che
garantisce il limite) e all’aumentare, in valore assoluto, di Id (per deflussare la
macchina).
2) Il centro dei cerchi limiti di tensione è interno al limite di corrente.
Λ
In questa situazione ( mg < IN ) il punto che descrive il maggior rapporto
L
coppia/corrente (a parità di tensione) inizialmente rimane sulla circonferenza limite
di corrente (Fig.10) come nel caso precedente (regione a potenza apparente costante)
ma, raggiunto il punto P (sulla verticale del centro dei cerchi limiti di tensione),
segue la retta avente ascissa −Λ mg L (regione a potenza apparente decrescente). In
questa situazione non esiste una velocità limite di rotazione se non dovuta alle
restrizioni poste dalla meccanica della macchina.
7
Cap. 4 - Regioni di funzionamento
La variabile che controllo passando da un sistema all’altro (cioè da BC a CH) è
la velocità. A seconda della velocità stabilisco quale valore assegnare a Id* :
Ω ≤ ΩB
assegno ad Iq* il valore necessario e pongo Id* = 0.
ΩB < Ω ≤ ΩCH
Ω > ΩCH
Id* = circonferenza .
Λ
Id* = − mg valore costante.
L
Fig. 8 – Schema di controllo a blocchi, dove il valore di Id* varia col variare della Ω.
Il controllo di Iq* è retroazionato, mentre per Id* c’è bisogno del calcolo della
velocità.
Per calcolare ΩCH faccio come segue:
Fig.9 – Triangolo CHO che ci permette di determinare il valore di ΩCH .
8
Cap. 4 - Regioni di funzionamento
2
Λ mg U N
I =
+
L ΩCH L
2
2
N
(3.6)
⇒ ΩCH =
U N2
(LI N ) 2 − Λ2mg
È importante capire la tecnica di deflussaggio adatta. Si deve agire sulla velocità per
poi avere effetti sulla coppia, il principio causa-effetto (coppia-velocità) anche in
questo caso aiuta: si deve intervenire sugli effetti per modificare le cause.
Fig.10 - Diagramma circolare per un PMSM isotropo (SPMb)
Punti di lavoro in deflussaggio (Λ mg L < IN )
Gli andamenti della coppia, della tensione e delle correnti ( Id , Iq e del modulo I)
per una macchina isotropa con il centro dei cerchi limiti di tensione interno al cerchio
limite di corrente sono rappresentati nelle Fig.11 e 12.
T
B
P
Ω em
U
B
P
Ω em
Fig.11 - PMSM isotropo (SPMb), (Λ mg L < IN ), Coppia T e tensione U
9
Cap. 4 - Regioni di funzionamento
Id
B
P
Iq
Iq
B
P
Id
Ω em
I
B
P
Ω em
Fig.12 - PMSM isotropo (SPMb), (Λ mg L < IN ), Correnti Id , Iq e I (modulo)
Raggiunta la velocità base, la tensione rimane costante e pari al valore nominale
mentre la coppia diminuisce tendendo asintoticamente a zero. Il modulo di corrente I
rimane inizialmente costante (dal punto B al punto P) per poi diminuire nella regione
a potenza apparente decrescente fino al valore Λ mg L; la componente di corrente Id
aumenta da B a P (per deflussare la macchina) e poi rimane costante mentre la
componente di corrente Iq tende asintoticamente a zero.
4.4 Macchina anisotropa
Per la macchina anisotropa si possono fare dei ragionamenti del tutto analoghi a
quelli già fatti per la macchina isotropa. Le differenze sostanziali sono dovute al fatto
che le induttanze relative all’asse d e all’asse q sono diverse ( Ld ≠ Lq , ξ ≠ 1).
La (2.5) rappresenta in questo caso una famiglia di ellissi concentriche il cui
centro può essere sia interno che esterno alla curva limite di corrente.
Differenze maggiori si hanno per quanto riguarda le curve a coppia costante.
Infatti, ricavando la componente Iq dall’espressione della coppia (2.1.b), si ottiene:
Iq =
T
3
p ⋅ Λ mg + Ld − Lq ⋅ I d
2
[
(
) ]
(4.1)
che individua nel piano Id , Iq , al variare del valore di coppia, una famiglia di
iperboli aventi per asintoti orizzontali e verticali rispettivamente le rette:
Iq = 0
Id =
(4.2.a)
Λ mg
Ld − Lq
(4.2.b)
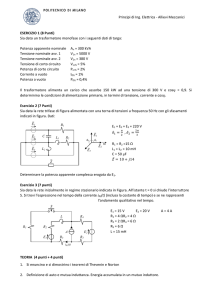
Come è evidente dalle Fig.13 e 14, per ogni valore del modulo di corrente I il
valore massimo di coppia che si può ottenere è quello relativo all’iperbole tangente al
cerchio di raggio I. In queste condizioni, suddividendo la corrente nelle componenti
10
Cap. 4 - Regioni di funzionamento
d e q, si sfrutta appieno anche la coppia di riluttanza (oltre a quella elettrodinamica)
caratteristica delle macchine anisotrope.
Iq
3
T=1
2
T = 0.71
B
T = 0.45
1
T = 0.22
0
Ω em = 1
-1
-2
-3
-4
-3
-2
-1
0
1
Id
Fig.13 - Diagramma circolare per un PMSM anisotropo (IPMa);
Punti di lavoro nella regione a coppia disponibile costante (Λ mg L > IN ).
Iq
T=1
3
T = 0.63
2
B
T = 0.34
1
T = 0.49
0
-1
Ω em = 1
-2
-3
-4
-3
-2
-1
0
1
2
Id
3
Fig.14 - Diagramma circolare per un PMSM anisotropo (IPMb);
Punti di lavoro nella regione a coppia disponibile costante (Λ mg L < IN ).
Analogamente a quanto avviene per le macchine isotrope, con un opportuno
progetto del motore è possibile fare intersecare l’ellisse limite di tensione (alla
velocità nominale) e il cerchio limite di corrente nel punto di lavoro a coppia
massima (punto B delle figure, corrispondente alle grandezze base nel modello
normalizzato) garantendo anche in questo caso la coppia nominale fino alla velocità
nominale.
La regione a coppia disponibile costante è quindi caratterizzata da una tensione
proporzionale alla velocità fino al valore U N , raggiunto alla velocità nominale ΩN .
11
Cap. 4 - Regioni di funzionamento
Nel funzionamento “in deflussaggio” al crescere della velocità Ωme diminuisce
l’ampiezza delle ellissi limiti di tensione e quindi il punto di lavoro ottimale
(massima coppia rispetto alla corrente utilizzata) si sposta, essendo vincolato a
rimanere all’interno di tali ellissi.
Anche per la macchina anisotropa devono essere considerati due casi.
1) Il centro delle ellissi limiti di tensione è esterno al limite di corrente.
Λ
In questa situazione ( mg = IN ) il punto che descrive il maggior rapporto
L
coppia/corrente (a parità di tensione) rimane sulla circonferenza limite di corrente
(Fig.15) e giace sull’intersezione con l’ellisse limite di tensione corrispondente alla
velocità di rotazione (regione a potenza apparente costante). Tale velocità può
raggiungere il massimo valore teorico:
Ωme,max =
UN
Λ mg − Ld IN
(4.3)
in corrispondenza del quale si ha la tangenza (sull’asse Id ) del cerchio limite di
corrente con l’ellisse limite di tensione (a coppia nulla).
Iq
3
T=1
T = 0.95
T = 0.82
2
T = 0.64
B
T = 0.42
1
0
Ω em = 4.89
Ω em = 2.75
Ω em = 1.91
Ω em = 1.47
Ω em = 1.19
Ω em = 1
-1
-2
-3
-4
-3
-2
-1
0
1
Id
Fig.15 - Diagramma circolare per un PMSM anisotropo (IPMa);
Punti di lavoro in deflussaggio (Λ mg L > IN )
Gli andamenti della coppia, della tensione e delle correnti ( Id , Iq e del modulo I)
per una macchina anisotropa con il centro delle ellissi limiti di tensione esterno al
cerchio limite di corrente sono rappresentati nelle Fig.16 e 17.
12
Cap. 4 - Regioni di funzionamento
T
B
Ω em
U
B
Ω em
Fig.16- PMSM anisotropo (IPMa), (Λ mg L > IN ),Coppia T e tensione U.
Id
B
Iq
Iq
B
Id
Ω em
I
B
Ω em
Fig.17 - PMSM anisotropo (IPMa), (Λ mg L > IN ),Correnti Id , Iq e I (modulo).
Oltre la velocità base, la tensione rimane costante e pari al valore nominale
mentre la coppia diminuisce fino a zero quando la velocità raggiunge il valore
massimo; il modulo di corrente I rimane costante al variare delle componenti Id e Iq
(quest’ultima componente assume il valore nullo alla velocità massima).
2) Il centro delle ellissi limiti di tensione è interno al limite di corrente.
In questa situazione ( Λ mg Ld > IN ) il punto che descrive il maggior rapporto
coppia/corrente (a parità di tensione) inizialmente rimane sulla circonferenza limite
di corrente (Fig.18) come nel caso precedente (regione a potenza apparente costante)
ma, raggiunto il punto P (quando l’iperbole corrispondente alla coppia massima è
tangente all’ellisse limite di tensione), si sposta all’interno della circonferenza limite
di corrente (regione a potenza apparente decrescente) nei punti in cui vi è tangenza
tra le ellissi e le iperboli. Anche in questo caso non esiste una velocità limite di
rotazione se non dovuta alle restrizioni poste dalla meccanica della macchina.
13
Cap. 4 - Regioni di funzionamento
T=1
T = 0.91
Iq
3
T = 0.70
2
B
1
T = 0.44
P
T = 0.24
T = 0.08
0
Ω em = 8.95
Ω em = 3.46
Ω em = 2.14
Ω em = 1.55
Ω em = 1.21
Ω em = 1
-1
-2
-3
-4
-3
-2
-1
0
1
2
3
Id
Fig.18 - Diagramma circolare per un
PMSM anisotropo (IPMb)
Punti di lavoro in deflussaggio
(Λ mg L < IN )
Gli andamenti della coppia, della tensione e delle correnti ( Id , Iq e del modulo I)
per una macchina anisotropa con il centro delle ellissi limiti di tensione interno al
cerchio limite di corrente sono rappresentati nelle Fig.19 e 20.
T
B
P
Ω em
U
B
P
Ω em
Fig.19 - PMSM anisotropo (IPMb), (Λ mg L < IN ),Coppia T e tensione U.
Id
B
P
Iq
Iq
Id
B
P
Ω em
I
B
P
Ω em
14
Cap. 4 - Regioni di funzionamento
Fig.20 - PMSM anisotropo (IPMb), (Λ mg L < IN ), Correnti Id , Iq e I (modulo).
Oltre la velocità base, la tensione rimane costante e pari al valore nominale
mentre la coppia diminuisce tendendo asintoticamente a zero. Il modulo di corrente I
rimane inizialmente costante (dal punto B al punto P) per poi diminuire nella regione
a potenza apparente decrescente tendendo al valore Λ mg Ld mentre la componente
di corrente Iq tende asintoticamente a zero.
15