Solitoni topologici in teorie classiche di
campo
Tesi di laurea triennale in fisica
A.A 2007-2008
Relatore: Prof. Riccardo Giachetti
Candidato: Stefano Iubini
1
Introduzione
In ambito classico il concetto di solitone è associato a particolari soluzioni di equazioni di
campo non lineari. Per introdurre in modo intuitivo tale concetto, possiamo analizzare qualche
semplice esempio di equazione d’onda relativistica in dimensione (1+1).
equazione di d’Alembert:
∂2
1 ∂2
µ
−
φ(x, t) = 0
(1)
2φ = ∂µ ∂ φ =
c2 ∂t2 ∂x2
dove φ(x, t) è un campo scalare in (1+1) dimensioni.
Sappiamo che questa equazione è lineare e non dispersiva, ciò implica che la soluzione generale assuma la forma φ(x, t) = f1 (x− ct)+ f2 (x+ ct). Un generico pacchetto d’onde localizzato
f (x − ct) si propagherà con velocità uniforme c senza subire distorsioni di forma, inoltre, se
consideriamo una soluzione costituita a t = −∞ da due pacchetti separati in avvicinamento,
la soluzione per t = +∞ è ancora costituita dai due pacchetti in allontanamento che hanno
ripreso la forma iniziale a seguito della collisione avvenuta per qualche t finito.
equazione di Klein-Gordon:
(2 + m2 c2 )φ(x, t) = 0
(2)
Questa equazione è ancora lineare e come per l’equazione di d’Alembert le onde piane
exp [i(kx ± ωt)] formano un insieme completo di soluzioni. Adesso abbiamo tuttavia una
relazione di dispersione ω 2 = k2 c2 + m2 c2 , di conseguenza un pacchetto d’onde perde la sua
forma iniziale durante l’evoluzione temporale.
Consideriamo un’equazione non lineare molto semplice, del tipo:
2φ(x, t) + φ3 = 0
(3)
In questo caso la conoscenza della struttura delle soluzioni diventa più complicata; a differenza
dei due casi precedenti, non sono ora più applicabili gli strumenti dell’analisi di Fourier, si
può in ogni caso provare che un generico pacchetto d’onde si sparpaglia nel tempo. Per
alcuni tipi di equazioni contenenti sia termini dispersivi sia termini non lineari può verificarsi
un bilanciamento tra i rispettivi effetti in modo che alcune soluzioni nella forma di pacchetti
localizzati si propaghino senza alterare la propria forma; tali soluzioni sono dette onde solitarie.
Per poter parlare di solitoni propriamente detti occorre conoscere il comportamento di più
onde solitarie, in altre parole è necessario studiare come si comportano delle onde solitarie
quando interagiscono tra loro. Cerchiamo di formalizzare questo concetto prendendo in esame
l’equazione di campo proveniente da una densità lagrangiana invariante di Lorentz:
1 ∂φ 2 1 ∂φ 2
−
− U (φ)
L=
2 ∂t
2 ∂x
dove U (φ) è una funzione semidefinita positiva che vale 0 per qualche valore di φ
Dalle equazioni di Eulero-Lagrange
∂L
∂L
∂L
=
+
∂φ
∂(∂φ/∂t)
∂(∂φ/∂t)
1
(4)
(5)
otteniamo l’equazione
2φ = −
∂U
∂φ
(6)
definiamo inoltre il funzionale energia come
# Z
Z +∞ " 2
+∞
1 ∂φ 2
1 ∂φ
dx
dx ǫ(x, t)
E[φ] =
+
+ U (φ) =
2 ∂t
2 ∂x
−∞
−∞
(7)
con ǫ densità di energia.
L’equazione di moto (6) conserva per ogni t il funzionale energia che in tutti i casi che
tratteremo dovrà assumere valori finiti. Si definisce soluzione localizzata una soluzione a cui
corrisponde una densità di energia che per ogni t è localizzata in una qualche regione finita dello
spazio e tende a 0 all’infinito spaziale in modo sufficientemente veloce da essere integrabile.
Un’onda solitaria è invece una soluzione localizzata non singolare la cui densità di energia
presenta la seguente dipendenza temporale:
ǫ(x, t) = ǫ(x − ut)
(8)
dove u è una velocità costante ed ǫ(x, t) una funzione non identicamente nulla.
Questa definizione inserisce le onde solitarie nella classe delle soluzioni non dissipative,
dove per soluzione dissipativa si intende una funzione alla quale è associata una densità di
energia ǫ(x, t) tale che
lim max ǫ(x, t) = 0
(9)
t→∞ x∈R
Si deve notare inoltre che dalla (8) segue che ogni soluzione indipendente dal tempo (statica)
è automaticamente un’onda solitaria con u = 0.
Supponiamo adesso che nel lontano passato una soluzione sia costituita da N onde soltarie
con posizioni ai e velocità ui arbitrarie, allora la densità di energia di una tale soluzione avrà
la forma
N
X
ǫ0 (x − ai − ui t)
t −→ −∞
(10)
ǫ(x, t) −→
i=1
con ǫ0 (x − ai − ui t) densità di energia di un’onda solitaria.
Data questa configurazione a t = −∞ la soluzione evolverà nel tempo governata dall’equazione non lineare; se accade che
ǫ(x, t) −→
N
X
i=1
ǫ0 (x − ai − ui t + δi )
t −→ +∞
(11)
dove δi sono sfasamenti costanti, allora ciascuna delle onde solitarie è detta solitone. Si ha
quindi che i solitoni hanno un comportamento molto simile a quello delle onde lineari non
dispersive in quanto le rispettive densità di energia riacquistano asintoticamente la propria
forma e velocità iniziali; l’unica traccia dell’avvenuta collisione tra solitoni è lo sfasamento
δi . Mentre tutti i solitoni sono onde solitarie, l’inverso è ovviamente falso; la definizione di
solitone risulta essere particolarmente restrittiva e in generale è molto difficile dimostrare che
2
una data soluzione è un solitone, questo perchè per poter provare le (10) e (11) è necessario
trovare esplicitamente la forma della soluzione costituita da un numero arbitrario di onde
solitarie. D’altra parte si deve precisare che assai spesso nelle varie applicazioni della fisica
l’interesse è rivolto verso le onde solitarie, piuttosto che ai solitoni veri e propri, per di più è
abbastanza comune che i due concetti vengano identificati portando a chiamare solitone ciò
che è invece un’onda solitaria. Nel seguito ci adatteremo a questa tradizione fatta eccezione
per alcuni casi in cui si renderà necessario introdurre le dovute distinzioni.
Precisiamo che la definizione di onde solitarie e solitoni attraverso la densità di energia non
è l’unica delle possibili scelte ma certamente è una delle più comode ai fini della nostra trattazione: in primo luogo la generalizzazone al caso di più campi in più dimensioni è immediata,
inoltre un approccio di questo tipo facilita lo studio delle proprietà delle soluzioni solitoniche indipendentemente dalla forma esplicita che assumono queste ultime. Come vedremo in
seguito, la nostra analisi consiste proprio nel mostrare come si possa fare una classificazione
“topologica” delle soluzioni solitoniche di una data teoria applicando alcuni concetti elementari dell’omotopia; la potenza di una tale impostazione risiede nella capacità di dare importanti
informazioni riguardo al problema anche quando non si è in grado di risolverlo esplicitamente.
2
Solitoni in dimensione (1+1)
In questo paragrafo tratteremo i casi più semplici che danno luogo a onde solitarie, quando cioé
la dinamica del sistema è descritta da un singolo campo scalare reale in due dimensioni (una
temporale e una spaziale). Riprendiamo l’equazione di moto (6) e studiamo alcune importanti
famiglie di soluzioni.
Le soluzioni più semplici sono le soluzioni costanti, esse sono tutti e soli i minimi assoluti di
U (φ) in corrispondenza dei quali la funzione U (φ) assume il valore 0 per come è stata definita.
Queste sono inoltre le sole soluzioni che minimizzano l’energia totale facendole assumere il
valore 0.
Un’altra famiglia è quella delle soluzioni statiche per le quali l’equazione di moto ed il
funzionale energia si riducono a
∂U
∂2φ
(12)
=−
2
∂x
∂φ
#
Z +∞ " 2
1 ∂φ
dx
Es [φ] =
+ U (φ)
(13)
2 ∂x
−∞
E’ chiaro che se in linea di principio conoscessimo a priori tutte le soluzioni ad energia finita
di (6), la ricerca delle onde solitarie e dei solitoni sarebbe semplicemente ridotta alla verifica
delle condizioni (8), (10) e (11). In generale questo metodo “diretto” non è applicabile a causa
della complessità dell’equazione da risolvere; lo studio delle soluzioni statiche è invece molto
più semplice dato che è sempre possibile riportare la (12) (che è un’equazione differenziale
ordinaria del secondo ordine) a quadrature. La condizione Es [φ] < ∞ impone che il campo φ
per x −→ ±∞ tenda ad una soluzione costante individuata da uno zero di U (φ), quindi
∂φ
= lim U (φ) = 0
x−→±∞
x−→±∞ ∂x
lim
3
(14)
moltiplicando la (12) per ∂φ/∂x e tenendo conto delle condizioni appena trovate, abbiamo:
1
2
∂φ 2
= U (φ)
∂x
p
∂φ
= ± 2U (φ)
∂x
Z φ(x)
dξ
p
x − x0 = ±
2U (ξ)
φ(x0 )
(15)
(16)
(17)
con x0 costante di integrazione in corrispondenza della quale il campo prende il vale φ(x0 ).
Una volta calcolato l’integrale in (17) si conoscono le soluzioni statiche e quindi anche
le onde solitarie con velocità u = 0, se adesso si sfrutta l’invarianza della lagrangiana per
trasformazioni di Lorentz, si vede che basta applicare un boost alla soluzione statica per
ottenere la corrispondente onda solitaria con velocità generica u.
Cerchiamo adesso di determinare alcune proprietà generali delle onde solitarie osservando
che l’equazione (12) ammette un’analogia con un semplice modello meccanico: se consideriamo infatti la variabile x come il tempo e il campo φ(x) come la posizione di una particella
puntiforme di massa unitaria, allora la (12) non è altro che la seconda legge di Newton per il
moto della particella sottoposta ad un potenziale U ′ = −U (φ). Consideriamo il caso in cui il
potenziale U (φ) abbia un solo minimo in corrispondenza di φ1 , questo implica che il potenziale
U’ avrà invece un unico massimo in φ1 e sarà negativo per tutti gli altri valori. Le condizioni
al contorno richiedono che nel lontano passato e nel lontano futuro la posizione della particella
tenda al valore costante φ1 , di conseguenza otteniamo che l’unica traiettoria possibile è quella
costante φ(x) = φ1 , qualsiasi spostamento dalla posizione di equilibrio, infatti, farebbe tendere
la posizione della particella all’infinito.
Studiamo invece la situazione in cui il potenziale U’ presenta due o più massimi degeneri
come in figura 1: questa volta le condizioni al contorno prevedono che la particella parta
da un massimo per x = −∞ e arrivi a un massimo per x = +∞, si vede inoltre che questi
due massimi devono essere contigui. Quando infatti la particella arriva su φ2 che è il primo
U’(φ)
φ1
φ2
φ3
φ
Figura 1: Potenziale U’ con 3 massimi degeneri.
massimo che incontra dopo quello dal quale è partita, abbiamo per definizione U ′ (φ2 ) = 0
4
e (∂U ′ /∂φ)(φ2 ) = 0; dall’equazione (16) troviamo ∂φ/∂x = 0, inoltre dall’equazione delle
soluzioni statiche
∂2φ
=0
(18)
∂x2
∂ dU (φ)
d2 U ∂φ
∂3φ
=0
(19)
=
=
∂x3
∂x
dφ
dφ2 ∂x
∂4φ
d2 U ∂ 2 φ d3 U ∂φ 2
=
+
=0
ecc...
(20)
∂x4
dφ2 ∂x2
dφ3 ∂x
Vediamo quindi che in corrispondenza di φ2 tutte le derivate ∂ n φ/∂xn si annullano, di conseguenza il moto si arresta necessariamente in φ2 e, dato che la funzione U (φ(x)) non si annulla
mai per x finiti, si ha che la soluzione φ(x) è monotona. L’analogia meccanica ci permette di
concludere che se U ha un solo minimo non ci sono onde solitarie statiche, se invece possiede
un insieme discreto di n minimi degeneri si hanno 2(n − 1) tipi di soluzioni che connettono due
minimi consecutivi quando x varia tra −∞ e +∞. Questo chiarisce il significato di espressioni
come “il solitone collega due diversi stati di vuoto”.
Vediamo adesso un esempio che illustra quanto è stato precedentemente esposto:
2.1
Teoria φ4
2 2
Questo modello presenta un potenziale U (φ) = λ4 φ2 − mλ , la lagrangiana del sistema è
pertanto:
2
m2
1 ∂φ 2 1 ∂φ 2 λ
2
(21)
−
−
φ −
L=
2 ∂t
2 ∂x
4
λ
con λ e m2 costanti positive.
Si ottengono i seguenti risultati:
5
• Equazione del moto
• Soluzioni costanti
• Equazione statica
• Quadratura
∂2φ ∂2φ
− 2 = m2 − λφ3
∂x2
∂t
(22)
m
φ = ±√
λ
(23)
∂2φ
= −m2 φ + λφ3
∂x2
(24)
m
m
φ(x) = ± √ tanh √ (x − x0 )
2
λ
(25)
in questo caso la soluzione con il + è detta “kink, quella con il - “antikink”.
• Densità di energia
m4
4 m
sech √ (x − x0 )
ǫ(x) =
2λ
2
• Energia totale (anche detta “massa classica del kink”)
√
2 2 m3
M=
3 λ
• Soluzione in movimento con velocità u =
(26)
(27)
v
c
m (x − x0 ) − ut
m
√
√
tanh
φu (x, t) =
λ
2
1 − u2
(28)
Osserviamo che l’onda solitaria φkink (x) risulta singolare nel limite λ → 0, questo dimostra
che tale soluzione non può essere ottenuta tramite uno sviluppo perturbativo nel parametro λ.
Ci possiamo inoltre chiedere se kinks ed antikinks sono veri e propri solitoni o se sono soltanto
onde solitarie: per rispondere alla domanda dobbiamo studiare come evolve una soluzione
costituita da diversi kinks e antikinks. E’ ovvio che a causa della struttura del potenziale
l’unico caso possibile (cioè compatibile con la richiesta E[φ] < ∞) è quello in cui kinks e
antikinks si alternano, tuttavia simulazioni numeriche dimostrano che un kink e un antikink
non conservano la propria forma dopo una collisione. Concludiamo dunque che il modello φ4
non dà luogo a solitoni.
3
Solitoni topologici
Introduciamo adesso un aspetto che riguarda direttamente il problema che vogliamo trattare.
Nel modello φ4 abbiamo visto che un kink è una soluzione che collega i due diversi stati
di vuoto della teoria come in fig ??, ci chiediamo a questo proposito se è possibile avere una
6
soluzione la cui evoluzione temporale preveda il passaggio da uno stato di tipo kink a uno stato
di tipo antikink. La risposta è ovviamente negativa, una tale evoluzione richiederebbe infatti
una quantità infinita di energia come si può facilmente vedere dalla figura 2 se si immagina
che la soluzione “appoggiata” sulla superficie del potenziale sia una corda infinitamente estesa
che risente dell’interazione col potenziale stesso: con una energia finita si può spostare una
regione finita della corda da uno stato di vuoto a un altro ma non si può spostare l’intera corda.
Formalizziamo il concetto appena espresso: la condizione di finitezza dell’energia impone che
Figura 2: Visione tridimensionale del potenziale U (φ) e della soluzione φkink (x).
un qualsiasi campo (statico o dipendente dal tempo) ad ogni istante t tenda ad un minimo della
funzione U (φ) per ogni punto dell’ infinito spaziale, ovvero, introducendo l’insieme discreto
degli stati di vuoto M = {φ1 , φ2 · · · φN }:
lim φ(x, t) ≡ φ(+∞, t) = χ1 (t)
x→+∞
lim φ(x, t) ≡ φ(−∞, t) = χ2 (t)
x→−∞
∀t ∈ R
(29)
dove χ(t) è una funzione che prende valori in M . Osserviamo adesso che, essendo l’evoluzione
temporale continua, la funzione φ(∞, t) è una funzione continua, mentre in generale χ(t)
sarà non continua, per esempio tale funzione potrebbe essere realizzata mediante opportune
combinazioni di funzioni θ di Heaviside. Per rendere accettabili le uguaglianze in (29) risulta
quindi necessario che χ(t) sia costante rispetto al tempo, di conseguenza:
d
lim φ(x, t) = 0
(30)
dt x→±∞
Queste considerazioni ci autorizzano a suddividere lo spazio delle soluzioni ad energia finita in
settori ciascuno caratterizzato da due indici, ovvero i due valori stazionari φ(−∞) e φ(+∞).
Questi settori sono topologicamente disconnessi in quanto un campo appartenente ad un settore non può essere distorto con continuità in un campo appartenente ad un settore diverso
7
senza comportare una divergenza nell’energia totale. Guardando poi all’evoluzione temporale
come un esempio di trasformazione continua, si deduce che un qualsiasi campo in evoluzione
rimarrà sempre nel settore al quale apparteneva ad un certo istante iniziale. Da un punto di
vista ancora più astratto, ciascuna soluzione ad energia finita definisce una applicazione dai
due punti (−∞, +∞), che rappresentano l’infinito spaziale 1-dimensionale, nell’insieme degli
stati di vuoto M , per cui l’appartenenza di due soluzioni allo stesso settore o a settori diversi
dipende dalla possibilità di deformare con continuità le rispettive applicazioni l’una nell’altra,
ovvero dalla possibilità che le due applicazioni siano omotopicamente equivalenti. Nel caso
del modello φ4 vediamo che esistono quattro modi diversi
√ per√associare un punto dell’insieme
S 0 = {−∞, +∞} ad un punto dell’insieme M = {m/ λ, m/ λ}, ovvero:
m
m
m
m
m
m
m
m
+√ , +√
−√ , −√
−√ , +√
+√ , −√
(31)
λ
λ
λ
λ
λ
λ
λ
λ
dove la notazione (x, y) indica che x è associato a −∞ e y a +∞, gli elementi di tipo (x, x)
corrispondono ai settori di tipo vuoto che contengono il vuoto x. I quattro settori cosı̀ individuati risultano disconnessi, possiamo quindi classificare le soluzioni ad energia finita in
funzione della loro appartenenza a questi settori. E’ chiaro inoltre che una partizione dell’insieme delle soluzioni a energia finita induce automaticamente una classificazione di tutti
i suoi sottoinsiemi, in particolare dell’insieme dei solitoni. L’aspetto importante di queste
considerazioni è che l’esistenza di una topologia non banale per lo spazio delle applicazioni
dall’infinito spaziale all’insieme degli stati di vuoto si rivela molto utile per la ricerca di una
classe di solitoni che per questa ragione vengono chiamati topologici.
Supponiamo per
esempio
√ √
4
di studiare le soluzioni del modello φ appartenenti al settore −m/ λ, +m/ λ e di voler
cercare il campo che minimizza l’energia statica tra tutti i campi appartenenti a quel settore.
Il campo che cerchiamo è stabile in quanto soddisfa una condizione di minimo dell’energia,
esso è anche soluzione dell’equazione statica, ma deve essere necessariamente diverso da uno
stato di vuoto, poiché quest’ultimo appartiene ad un settore diverso; un campo che rispetta
queste richieste è proprio il kink. Se consideriamo invece un potenziale con un solo minimo, lo
spazio delle soluzioni è connesso, tutte le soluzioni sono deformabili con continuità nello stato
di vuoto e non esitono solitoni topologici (in tale caso, come abbiamo visto, non esiste nessun
tipo di soluzione solitonica). Alla fine di questo percorso si devono precisare due aspetti:
1. Considerazioni topologiche sullo spazio delle soluzioni a energia finita applicate al problema della ricerca dei solitoni forniscono in generale condizioni sufficienti, non necessarie.
2. Esistono soluzioni solitoniche dette non topologiche che non nascono dal meccanismo
appena descritto.
Ciò potrebbe far sorgere alcuni dubbi sull’utilità di quanto abbiamo fatto. Il punto è che
finché si rimane nell’ambito delle teorie che coinvolgono un campo scalare in (1+1) dimensioni,
difficilmente si riesce ad apprezzare la semplificazione introdotta dall’analisi topologica. Come
vedremo in seguito, in teorie più complicate che coinvolgono più campi in più dimensioni, il
metodo descritto, opportunamente adattato, permette in alcuni casi di trovare una scorciatoia
che conduce alla determinazione di soluzioni solitoniche. Spesso queste soluzioni sono anche
le uniche che si conoscono.
8
Riprendiamo adesso l’equazione (30) e osserviamo che essa appare sotto forma di una legge
di conservazione, ciò permette di definire una opportuna costante del moto che viene chiamata
“carica topologica”. Nel caso del modello (φ4 ) abbiamo:
√ Z +∞
√
λ
λ
∂φ
Q=
=
[φ(+∞) − φ(−∞)] = 0, ±1
(32)
dx
2m −∞
∂x
2m
Alla carica Q è poi associata una corrente conservata:
√
λ µν
µ
j =
ǫ ∂ν φ
2m
inoltre
µ
∂µ j = 0
Q=
Z
+∞
(33)
dx j 0 (x)
(34)
−∞
Si deve notare che la conservazione della carica Q non ha origine da particolari simmetrie della
lagrangiana come avviene per le usuali leggi di conservazione regolate dal teorema di Noether,
essa è piuttosto una conseguenza della mancanza di connessione nello spazio delle soluzioni a
energia finita.
4
Teorema di Derrick
Giunti a questo punto, il passo successivo sarebbe quello di ricercare soluzioni statiche per
modelli in più di una dimensione e con più campi scalari, esiste tuttavia un risultato generale
che rende vana questa intenzione:
~ = (φa ) un insieme di campi scalari (raccolti in un vettoTeorema 1 (Derrick) Sia φ
re) in (1+D) dimensioni. Assumiamo che la dinamica di questi campi sia regolata da una
lagrangiana:
1
1 ~ µ ~
~ = (∂µ φa ) (∂ µ φa ) − U (φa )
∂µ φ · ∂ φ − U φ
(35)
L=
2
2
con U funzione non negativa ed uguale a zero sugli stati fondamentali della teoria. Allora per
D ≥ 2 le uniche soluzioni non singolari, statiche e di energia finita sono gli stati fondamentali.
Vale la pena dare una dimostrazione del teorema:
definiamo i due funzionali
Z
1
~ a · ∇φ
~ a)
dD x(∇φ
V1 =
2
Z
V2 = dD xU (~(φ))
(36)
(37)
V1 e V2 sono non negativi e sono simultaneamente nulli solo sugli stati fondamentali. Consideriamo una soluzione statica φ~s (~x) e definiamo una famiglia ad un parametro di funzioni di
campo
φ~s (~x; λ) = φ~s (λ~x)
λ>0
(38)
9
Si può verificare che per questa famiglia il funzionale dell’energia statica assume la forma:
Es (λ) = Es [φ~s (λ~x)] = λ2−D V1 + λ−D V2
(39)
Dato che φ~s (~x) è una soluzione statica, la funzione Es (λ) deve essere stazionaria per λ = 1;
derivando la (39) rispetto al parametro λ si ottiene:
(D − 2)V1 + DV1 = 0
(40)
Se D > 2, dato che V1 ≥ 0 e V2 ≥ 0, l’equazione (40) può essere soddisfatta solo da V1 = 0 e
V2 = 0. Questo implica allora che φ~s (~x) = cost, ovvero φ~s è uno stato fondamentale. Se invece
~ φ
~=0
D = 2 la (40) implica V2 = 0, ma allora allora le soluzioni statiche ottenute da δEs [φ]/δ
~ φ
~ = 0. L’equazione che ne risulta è:
si possono ottenere anche da δV1 [φ]/δ
~=0
∇2 φ
(41)
Una funzione armonica in tutto RD è necessariamente una funzione costante, quindi, anche in
questo caso, φ~s (~x) = cost. Questo completa la dimostrazione del teorema.
Il teorema di Derrick afferma quindi che per campi scalari la cui dinamica è regolata da
una lagrangiana come la (35) non ci sono solitoni nella forma di soluzioni statiche; nulla si
può dire a proposito delle soluzioni solitoniche dipendenti dal tempo. Si deve sottolineare che
esistono comunque numerosi sistemi fisici descritti da funzioni lagrangiane ben più complicate
della (35) per i quali non valgono le ipotesi del teorema. Nel seguito tratteremo alcuni esempi
di questo tipo applicando l’analisi topologica delle soluzioni alla ricerca di soluzioni statiche.
5
Modello O(3) non lineare: variazioni sul tema
Presentiamo adesso un caso in cui l’esistenza di solitoni topologici statici è dovuta ad un meccanismo leggermente diverso rispetto a quello descritto nel paragrafo 3, si tratta del modello
O(3) non lineare, particolarmente utile in fisica dello stato solido in quanto descrive nel limite
continuo il comportamento di un ferromagnete isotropo classico bidimensionale. Il modello
è cosituito da tre campi scalari reali in (1 + 2) dimensioni {φa (~x, t); a = 1, 2, 3} legati da un
vincolo non lineare nella forma:
3
X
a=1
~·φ
~=1
φ2a (x, t) ≡ φ
∀(~x, t) ∈ R2 × R
la dinamica dei campi è poi regolata dalla lagrangiana:
1 ~ µ ~ 1
∂µ φ · ∂ φ = (∂µ φa ) (∂ µ φa )
L=
2
2
(42)
(43)
Osserviamo che in questo caso il teorema di Derrick non vale a causa della presenza del vincolo
(42) che altera sensibilmente la struttura delle soluzioni. In assenza della (42) l’equazione del
moto sarebbe semplicemente:
~=0
∇2 φ
(44)
10
che, in accordo col teorema di Derrick, ha come soluzioni non singolari statiche solo le soluzioni
costanti. Siamo qui in una situazione in cui le condizioni di non linearità delle equazioni di
campo non compaiono esplicitamente nella lagrangiana attraverso il potenziale U ma vengono
~ Estremando il funzionale azione con il vincolo imposto
indirettamente imposte sui campi φ.
attraverso un moltiplicatore di Lagrange si ottengono le equazioni di moto:
Z
Z
1
~ · (∂ µ φ)
~ + λ(~x, t)(φ
~·φ
~ − 1)]
~ =
(45)
S[φ]
dt d2 x [ (∂µ φ)
2
~
δS[φ]
~ + λφ
~=0
= 0 ⇒ ∂µ ∂ µ φ
(46)
~
δφ
~ ed usando la (42) si trova:
moltiplicando la (46) per φ
la (46) allora diventa:
~ · 2φ
~
λ(~x, t) = −φ
(47)
~ − (φ
~ · 2φ)
~ φ
~=0
2φ
(48)
Se ci limitiamo a studiare le soluzioni statiche allora l’equazione di campo diventa:
~ − (φ
~ · ∇2 φ)
~ φ
~=0
∇2 φ
il funzionale energia statica è in questo caso:
Z
1
~
~ j φ)d
~ 2x
Es [φ] =
(∂j φ)(∂
2
(49)
(j = 1, 2)
(50)
Cerchiamo ora di analizzare in maniera più approfondita la struttura delle soluzioni costanti
~ può essere considerato
e delle soluzioni statiche. Per prima cosa osserviamo che il campo φ
un vettore in uno spazio interno tridimensionale le cui direzioni sono individuate dall’indice a,
tale spazio deve essere distinto dallo “spazio fisico” i cui vettori sono invece gli usuali vettori
relativistici xµ . In questo senso un campo φa (xµ ) è una applicazione dallo spazio fisico allo
spazio interno, inoltre sia la lagrangiana (43) sia il vincolo (42) sono invarianti sotto rotazioni
del gruppo O(3) nello spazio interno.
~ = 0,
Dalla (50) si deduce che le soluzioni a energia nulla devono soddisfare la condizione ∂j φ
~ x) = φ
~ 0 = cost dove φ
~ 0 è un qualsiasi vettore unitario appartenente allo spazio
ovvero φ(~
~
interno. Dato che φ0 può puntare in una qualsiasi direzione nello spazio interno, abbiamo
una famiglia degenere di stati di vuoto i quali possono essere parametrizzati attraverso i punti
di una 2-sfera che chiameremo S2int . Due generici stati di vuoto sono legati attraverso una
trasformazione di O(3).
~ permette di trovare delle proprietà non banali per le soluzioni statiche di
Il funzionale E[φ]
energia finita che sono alla base dell’esistenza di soluzioni solitoniche topologiche per questo
modello. Affinchè l’integrale in (50) sia finito, introducendo coordinate polari, occorre che
r
X
a
2 r→∞
~ ak
k ∇φ
−→
1
rα
α>1
⇐⇒
11
r→∞
~ a k −→ 0 ∀a
r k ∇φ
(51)
quindi
~ x) = φ
~0
lim φ(~
r→∞
(52)
~ x)
Questo significa che in qualunque direzione si tenda all’infinito nello spazio fisico, il campo φ(~
~
deve tendere al medesimo valore limite φ0 , se infatti si ipotizzasse una dipendenza angolare
nel limite r → ∞, si otterrebbe una divergenza dell’energia dovuta alla componente angolare
del gradiente che vale 1r ∂φa /∂θ. Possiamo riformulare quanto appena trovato dicendo che i
punti all’infinito nello spazio fisico, rappresentabili su una circonferenza S 1 , vengono mappati
~ nello stesso punto φ
~ 0 dello spazio interno. Segue dunque che il campo
dal campo statico φ
~ x) è una applicazione definita non tanto sul piano R2 , bensı̀ su una sfera che chiameremo
φ(~
S2phys ottenuta riducendo i punti all’infinito del piano nel polo nord della sfera; la (52) produce
quindi una compattificazione dello spazio fisico che permette di definire le soluzioni statiche
di energia finita come applicazioni:
~ : S phys −→ S int
φ
2
2
(53)
~ possono ora essere facilmente classificate secondo omotopia facendo interveLe applicazioni φ
nire il secondo gruppo di omotopia della sfera S2 indicato con Π2 (S2 ). Sappiamo in particolare
che Π2 (S2 ) è isomorfo all’insieme dei numeri interi, ovvero Π2 (S2 ) = Z, di conseguenza si ottiene una classificazione delle soluzioni del tutto analoga a quella presentata nel paragrafo 3:
anche in questo caso due soluzioni appartenenti a classi di omotopia diverse non sono deformabili con continuità l’una nell’altra, ogni settore dello spazio delle soluzioni è poi individuato
da un numero intero Q che assume il significato di carica topologica. L’aspetto che impedisce
di ricondurre il modello O(3) alla classe di teorie del tipo φ4 è l’origine della classificazione topologica. Anche nel modello O(3) abbiamo un vuoto degenere, tuttavia la carica Q non nasce
dalle possibili scelte delle condizioni al contorno nelle diverse direzioni, al contrario si è visto
~ 0 su tutta la circonferenza S 1 rappresentatiche il campo deve assumere il medesimo valore φ
va dell’infinito spaziale. D’altra parte la condizione al contorno (52) richiede semplicemente
~ 0 sia uno stato di vuoto ma non fissa univocamente un particolare stato di vuoto come
che φ
accadeva per il modello φ4 . Da questo segue che due configurazioni con diverse condizioni al
contorno possono essere messe in relazione in modo continuo mediante un’opportuna rotazione
~ 0 non conducono a soluzioni con cadi O(3) nello spazio interno, pertanto, scelte diverse di φ
rica topologica diversa. La carica topologica nasce invece dalla compattificazione dello spazio
fisico e dal comportamento globale delle applicazioni dallo spazio fisico allo spazio interno.
Introduciamo un’espressione della carica topologica Q come integrale sulle funzioni di
~
campo φ:
Z
1
~ · (∂µ φ
~ × ∂ν φ)d
~ 2x
ǫµν φ
(54)
Q=
8π R2
La Q cosı̀ definita è effettivamente la carica topologica associata alle classi di omotopia contenute in Π2 (S2 ) in quanto, facendo un cambiamento di coordinate, si può far vedere che la
(54) è equivalente a :
Z
1
Q=
dS int
(55)
4π
12
Poiché S2int ha superficie 4π, la quantità Q dà proprio il numero di volte che viene rivestita
la sfera S2int quando la coordinata ~x varia su tutto R2 ; per questo motivo Q è anche detta
“winding number”.
Il funzionale (54) può essere utilizzato per trovare qualche soluzione esplicita per ogni
valore di Q: si può mostrare con semplici passaggi che l’ovvia disuguaglianza
Z
~ ± ǫµν φ
~ × ∂ν φ)
~ 2 ≥0
d2 x(∂µ φ
(56)
può essere riscritta in
Z
~ · (∂µ φ)
~ ≥ ±
d x(∂µ φ)
2
Z
~ · (∂µ φ
~ × ∂ν φ)]
~
d2 x[ǫµν φ
(57)
e ricordando le definizioni di Es e Q, si ottiene
Es ≥ 4π | Q |
(58)
Questa disuguaglianza fissa un limite inferiore per l’energia di una qualsiasi soluzione statica in
un determinato settore Q; ricordiamo a questo proposito che le soluzioni statiche si ottengono
minimizzando il funzionale Es con il vincolo (42). Poiché le soluzioni appartenenti a settori
diversi non possono essere deformate con continuità le une nelle altre, possiamo calcolare
separatamente i minimi di Es in ciascun settore e individuare quindi le soluzioni statiche di
carica | Q | come quelle soluzioni che soddisfano l’uguaglianza Es = 4π | Q |, ovvero
~ = ±ǫµν φ
~ × ∂ν φ
~
∂µ φ
(59)
Siamo quindi passati da un’equazione differenziale del secondo ordine, la (49), ad un’equazione
del primo ordine. Il passaggio non è stato indolore, infatti se è vero che tutte le soluzioni della
(59) che soddisfano il vincolo sono anche soluzioni della (49), in generale non è vero il contrario.
Le soluzioni statiche che non soddisfano la (59) non corrispondono a minimi assoluti di Es nei
settori Q, ma sono in generale degli estremi ad energia più elevata, ovvero minimi relativi. La
semplificazione introdotta dall’analisi topologica ha quindi il difetto di essere ristretta solo ad
una sottoclasse dell’insieme delle soluzioni statiche.
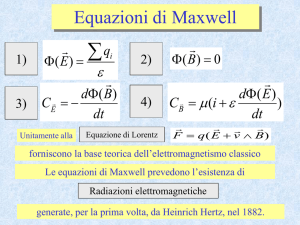
La (59) può essere ulteriormente semplificata sfruttando un cambiamento di variabili realizzato mediante una proiezione stereografica della sfera S2int sul piano parallelo al piano {φ1 , φ2 }
e passante per il polo sud della sfera (figura 3). Le nuove variabili (ω1 , ω2 ) sono quindi definite
dalla relazione:
2φ2
2φ1
e
ω2 =
(60)
ω1 =
1 − φ3
1 − φ3
introducendo anche la variabile complessa ω = ω1 + iω2 , otteniamo l’equazione :
∂1 ω = ∓i∂2 ω
(61)
facilmente riconducibile alle condizioni di Cauchy-Riemann per le funzioni ω(z) e ω(z ∗ ) con
z = x1 + ix2 . Concludiamo quindi che la soluzione generale della (59) è:
ω(z) oppure ω(z ∗ )
con ω(z) funzione olomorfa
13
(62)
φ3
N
P
φ2
φ1
S
ω2
P’
ω1
~
Figura 3: Interpretazione geometrica del cambiamento di variabili ω
~ (φ).
Riscrivendo ω(z) in termini di φa e ~x si ottiene la corrispondente soluzione statica dell’equazione di campo. Anche in questo caso si può sfruttare l’invarianza per trasformazioni di Lorentz
della lagrangiana del modello per ricavare le soluzioni solitoniche dipendenti dal tempo.
Consideriamo adesso un’importante classe di teorie che, come il modello O(3), possono
dare luogo a soluzioni solitoniche anche in dimensioni superiori. Verrà fatta inizialmente una
trattazione generale del problema seguita dalla discussione di un esempio particolare.
6
Teorie classiche di gauge
Le teorie di gauge coinvolgono un insieme di campi scalari (non necessariamente reali) riuniti
in un vettore n-dimensionale φ. Per queste teorie è definito un gruppo di Lie compatto e
connesso G, chiamato “gruppo di gauge”, con una rappresentazione unitaria n-dimensionale
D. Data una funzione g(x) dallo spazio-tempo al gruppo G, si definisce una trasformazione
dei campi scalari detta “trasformazione di gauge” come:
φ(x) 7−→ D(g(x))φ(x)
≡
φ(x) 7−→ g(x)φ(x)
(63)
In questo caso l’algebra di Lie del gruppo G (ovvero l’insieme dei generatori di G) è rappresentata da un insieme di matrici hermitiane T a di dimensione n × n che obbediscono alle relazioni
di commutazione :
[T a , T b ] = i cabc T c
(somma sugli indici ripetuti)
(64)
dove le cabc sono le costanti di struttura dell’algebra. Per mezzo dei generatori T a sono definiti i
“campi di gauge” reali Aaµ (x) il cui comportamento sotto trasformazioni di gauge è individuato
dalla seguente relazione:
i
Aaµ T a 7→ g(x)Aaµ (x)T a g(x)−1 + (∂µ g(x))g(x)−1
e
14
(65)
dove e è una costante reale detta “costante di accoppiamento di gauge”. Definiamo infine la
a come:
derivata covariante di φ ed il tensore di campo Fµν
Dµ φ = ∂µ φ − ieAaµ T a φ
a
Fµν
=
∂µ Aaµ
−
∂ν Aaµ
(66)
abc
− ec
Abµ Acν
(67)
con le seguenti proprietà di trasformazione:
Dµ φ
a
Fµν (x)T a
7→ g(x)Dµ φ
7→
(68)
a
g(x)Fµν
(x)T a g(x)−1
(69)
Per mezzo di questi oggetti si può costruire una densità lagrangiana invariante di gauge:
1 a aµν 1
F
+ Dµ φ† · Dµ φ − U (φ)
(70)
L = − Fµν
4
2
dove U è una funzione dei campi scalari invariante di gauge; come in precedenza assumeremo U
semidefinita positiva e nulla solo sugli stati fondamentali della teoria. Si noti che l’introduzione
della derivata covariante nella lagrangiana (70) impedisce di estendere i risultati del teorema
di Derrick alle teorie di gauge.
Descriviamo adesso un metodo particolarmente elegante che consente di mettere in relazione la struttura della varietà del vuoto, ovvero l’insieme degli zeri della funzione U, con il
meccanismo della rottura spontanea della simmetria legato alla presenza di un vuoto degenere.
Per prima cosa supponiamo che la varietà del vuoto M sia omogenea per il gruppo G, ovvero
che ogni stato di vuoto sia della forma gφ0 con g ∈ G e φ0 uno stato di vuoto di riferimento.
Definiamo il sottogruppo di stabilità H per l’elemento φ0 come l’insieme:
H = {h ∈ G : hφ0 = φ0 }
(71)
Si può dimostrare che per uno spazio omogeneo M il sottogruppo di stabilità H è lo stesso per
tutti gli stati di vuoto φ ∈ M , più precisamente, presi due stati di vuoto φ0 e φ1 , esiste sempre
un isomorfismo tra i corrispondenti sottogruppi H0 e H1 . Se M è omogeneo, la struttura di
H non dipende quindi dalla scelta dello stato φ0 . Sempre nell’ipotesi che M sia omogeneo
è possibile dimostrare che M è isomorfo all’insieme delle classi laterali G/H 1 . Per quanto
riguarda la rottura spontanea della simmetria possiamo allora distinguere tre diversi casi:
• se H = G il vuoto è unico e la simmetria non è rotta.
• se H ⊂ G, H 6= {e} la simmetria è parzialmente rotta.
• se H = {e} non c’è più traccia di simmetria.
Dopo questa breve introduzione alle teorie di gauge, l’obiettivo diventa quello di trovare le
condizioni che permettono di avere soluzioni ad energia finita e capire in quali casi ci si può
aspettare una classificazione non banale di queste ultime. Il primo passo è quello di cercare
una semplificazione che intervenga nelle espressioni (66) e (67) realizzabile attraverso una
opportuna trasformazione di gauge. Senza darne una dimostrazione riportiamo il seguente
risultato:
1
Ricordiamo che se H è un sottogruppo normale di G, ovvero se ghg −1 ∈ H
G/H ha struttura di gruppo.
15
∀h ∈ H
∀g ∈ G, allora
Proposizione 1 E’ sempre possibile trovare una opportuna trasformazione di gauge in modo
da avere Aa0 = 0.
La scelta della gauge Aa0 = 0 in particolare comporta:
a
F0i
= ∂0 Aai
D0 φ = ∂0 φ
si ottiene quindi un’espressione dell’energia totale del tipo E = T + V con
Z
1
1
D
a 2
†
T =
d x (∂0 Ai ) + ∂0 φ · ∂0 φ
2
2
Z
1
1
D
a 2
†
~ · Dφ
~ + U (φ)
V =
d x (Fij ) + Dφ
4
2
(72)
(73)
(74)
Se ci concentriamo come al solito sulla struttura delle soluzioni statiche il problema si semplifica
ulteriormente. Con un ragionamento analogo a quello che si usa per provare la proposizione
1 è possibile determinare delle trasformazioni di gauge indipendenti dal tempo il cui effetto è
quello di annullare le componenti radiali Aar (~x) esternamente ad una sfera centrata nell’origine;
in formule:
Aar (~x) = 0
r ≥ r0
(75)
Analizziamo adesso il caso di una teoria in 2 dimensioni spaziali, l’estensione al caso tridimensionale segue in modo immediato. Passando a coordinate polari e tenendo conto della (75)
possiamo scrivere:
Z ∞
Z 2π
dθ[∂r φ† · ∂r φ + Dθ φ† · Dθ φ + U (φ)]
(76)
E≥
rdr
0
r0
Affinchè l’integrale converga è quindi necessario che:
lim φ(r, θ) ≡ φ(∞, θ) = φ0
r→∞
φ0 ∈ M
(77)
Resta da discutere il comportamento all’infinito del termine (Dθ φ† · Dθ φ). In questo caso la
presenza della derivata covariante permette una dipendenza non banale di φ da θ che sarebbe
invece proibita dal normale gradiente, si noti infatti la differenza tra le due espressioni:
~
~eθ · ∇φ
=
~
~eθ · Dφ
=
1 dφ(∞, θ)
modello O(3)
r
dθ
1 dφ(∞, θ)
teorie di gauge
− ieAaθ T a φ
r
dθ
(78)
(79)
la (79) può annullarsi asintoticamente anche quando φ dipende da θ a patto che:
lim rAaθ T a φ(r, θ) = −
r→∞
i dφ(r, θ)
e dθ
(80)
in questo modo per grandi r Aaθ va come 1/r mentre il tensore di campo va come 1/r 2
assicurando l’integrabilità del funzionale energia.
16
Possiamo riassumere i risultati appena trovati in questo modo: in due dimensioni spaziali
ad ogni insieme di dati al contorno di soluzioni ad energia finita si associa una funzione φ(∞, θ)
dello spazio in cui sono assegnati i dati al contorno, ovvero una circonferenza S 1 ,nello spazio
omogeneo del vuoto G/H. Analogamente in 3 dimensioni spaziali si ha una funzione dalla
sfera S 2 in G/H.
Se due insiemi di dati al contorno sono associati alla medesima applicazione, allora è
ovvio che possiamo deformare con continità l’uno nell’altro senza che il funzionale energia
presenti divergenze; una volta sistemato il comportamento all’infinito spaziale nessun tipo
di trasformazione continua effettuata nella parte finita dello spazio causerà problemi. Se
invece i due insiemi di dati al contorno sono associati ad applicazioni diverse, essi possono
essere deformati con continuità se e solo se le applicazioni associate godono di tale proprietà.
Generalizzando il risultato appena ottenuto, possiamo enunciare il seguente teorema:
Teorema 2 Esiste una corrispondenza biunivoca tra lo spazio delle componenti connesse delle
soluzioni non singolari con energia finita e lo spazio delle classi di omotopia delle applicazioni
della sfera S D−1 nello spazio omogeneo G/H, dove D è il numero di dimensioni spaziali.
Come banale corollario segue in particolare che se U ha un solo zero, allora lo spazio G/H è
costituito da un singolo punto (si ha infatti H = G); esiste solo una classe di omotopia (in
realtà c’è una sola applicazione) e pertanto non esistono leggi di conservazione topologiche.
Abbiamo quindi ottenuto in forma generale il risultato discusso nel paragrafo 3, possiamo allora
affermare che l’esistenza di solitoni topologici per una data teoria richiede necessariamente la
presenza di un vuoto degenere.
Concludiamo il paragrafo enunciando un risultato che chiarisce la relazione tra classi di
omotopia e trasformazioni di gauge.
Proposizione 2 Siano φ1 (~x) e φ2 (~x) due soluzioni non singolari ad energia finita legate tra
loro da una trasformazione non singolare di gauge g(~x):
φ2 (~x) = g(~x)φ1 (~x)
(81)
Allora le corrispondenti applicazioni di S D−1 in G/H sono omotope.
7
Vortice di Nielsen-Olesen in (1+2) dimensioni
Il vortice è l’esempio più semplice di solitone in una teoria di gauge. Il nome “vortice” discende
dalla proprietà del modello in esame di ammettere delle soluzioni statiche di tipo “vortice”
della teoria di Landau-Ginzburg per superconduttori di tipo II.
La teoria possiede un gruppo di gauge abeliano U (1); l’insieme dei campi scalari è costituito
in questo caso da un singolo campo complesso φ su cui U (1) agisce moltiplicativamente. La
lagrangiana si scrive:
dove Fµν
1
1
1
L = − F µν Fµν + (Dµ φ)∗ · (Dµ φ) − λ(| φ |2 −F 2 )2
4
2
4
è ridotto al tensore elettromagnetico:
Fµν = ∂µ Aν − ∂ν Aµ
17
λ>0,F >0
(82)
(83)
mentre la derivata covariante è:
Dµ = ∂µ − ieAµ
(84)
notiamo che, essendo il gruppo abeliano, le costanti di struttura dell’algebra sono tutte nulle;
non compaiono poi esplicitamente i generatori T a .
La varietà del vuoto è individuata dall’equazione:
| φ0 |= F ⇒ φ0 = F eiα
α∈R
(85)
abbiamo quindi M = G/H = S 1 . Dal teorema (2) segue che l’unico valore della dimensione
spaziale compatibile con l’esistenza di solitoni topologici è D = 2, in quanto:
Π1 (S 1 ) = Z
(86)
Πk (S 1 ) = 0 ∀k ∈ N , k 6= 1.
Le condizioni asintotiche che devono essere soddisfatte dal campo φ per garantire E[φ] < ∞
sono:
lim | φ | = F
(87)
lim Dµ φ =
(88)
|x|→∞
|x|→∞
lim (∂µ φ − ieAµ φ) = 0
|x|→∞
ovvero:
lim φ(r, θ) = F eiα(θ)
(89)
i ∂µ φ
e φ
(90)
r→∞
lim Aµ (r, θ) = −
r→∞
La funzione φ(∞, θ) che descrive il comportamento del campo all’infinito spaziale è quindi:
φ(∞, θ) : S 1 → S 1
φ(∞, θ) = F eiα(θ)
(91)
In questo caso le classi di omotopia sono caratterizzate da un numero intero n, il “winding
number ”, che conta quante volte viene avvolta la circonferenza nello spazio dei campi quando
si percorre una volta la circonferenza delle condizioni al contorno nello spazio fisico. n è
definito come:
Z 2π
dα
1
(92)
dθ
n=
2π 0
dθ
Si trova in questo modo che lo spazio delle soluzioni ad energia finita si partiziona in un
numero infinito di componenti ciascuna individuata da un numero n. Dobbiamo ricordare che
in generale l’analisi topologica delle soluzioni non permette di stabilire l’esistenza di soluzioni
statiche; in questo caso non si riesce nemmeno a trovare qualche soluzione esplicita come è
stato fatto per il modello O(3). Accenniamo brevemente ad un metodo utilizzato per la ricerca
delle soluzioni.
Dalle considerazioni fatte nel paragrafo 6 possiamo scegliere A0 = Ar = 0, cercheremo poi
soluzioni a simmetria circolare del tipo:
Aθ = A(r)
φ = F (r)einθ
18
(93)
le condizioni asintotiche (89) e (90) d’altra parte impongono:
lim F (r) = F
lim A(r) =
r→∞
r→∞
n
er
(94)
chiaramente il fattore einθ contenuto in φ conduce a delle soluzioni (nel caso che esistano) con
carica topologica pari a n. Ricavando le equazioni del moto associate alla lagrangiana (82) e
inserendo le posizioni fatte, si ottengono le due equazioni accoppiate:
i
h
2
d
d
r dr
F (r) + nr − eA(r) + λ F 2 (r) − F 2 F (r) = 0
− 1r dr
(95)
ne
d 1 d
− dr r dr (rA(r)) + e2 A(r) − r F 2 (r) = 0
delle quali non è nota alcuna soluzione analitica. Possiamo comunque estrarre gli andamenti
asintotici sostituendo F (r) = F nella seconda equazione; abbiamo a questo punto un’equazione
lineare che può essere integrata fornendo:
r→∞
A(r) −→
e−eF r
n
+ cost · √
er
r
(96)
inserendo poi la (96) e la condizione F (r) = F nella prima equazione otteniamo:
r→∞
F (r) −→ F + cost · e−
√
λF r
(97)
concludiamo quindi che qualora esistessero delle soluzioni, esse tenderebbero ai valori asintotici
in modo esponenziale.
Esiste infine un risultato particolarmente interessante legato a questo modello. Dalle
equazioni (89) e (90) segue che se r tende all’infinito, Aθ diventa:
Aθ = −
1 dα
i 1 1 d
F eiα(θ) =
iα
e F e r dr
er dθ
~ attraverso il piano (xy) è allora:
il flusso totale del campo A
I
Z 2π
Z 2π
e
e
e
dα
1
~
~
~
Φ(A) =
A · dl =
dθ = n
Aθ rdθ =
2π
2π
2π 0
2π 0 dθ
(98)
(99)
dove si è usato il teorema della circuitazione e la definizione (92). Si ottiene quindi:
~ =
Φ(A)
2πn
e
(100)
~ come il potenziale vettore del campo elettromagnetico, la (100)
in particolare, interpretando A
rappresenta una relazione di quantizzazione del flusso del campo elettromagnetico. La stranezza consiste proprio nell’aver ottenuto una proprietà caratteristica di un sistema quantistico da
una teoria puramente classica. In realtà la (100) non può essere identificata con la condizione
di quantizzazione del flusso in superconduttività che invece è:
~ = 2πn~
(101)
Φ(A)
2q
osserviamo infatti che nel risultato classico non compare la costante ~, inoltre non c’è alcuna
relazione tra la costante di accoppiamento del campo e la carica dell’elettrone: solo a livello
quantistico si riesce a trovare la relazione 2q = ~e.
19