Geometria I
§ 10
67
Spazi connessi
Cfr: Sernesi Vol II, Cap III, §11 [1].
Il teorema del valore intermedio si può esprimere in termini di connessione:
(10.1) Definizione. Uno spazio topologico X è detto connesso se gli unici sottoinsiemi di X
simultaneamente aperti e chiusi11 sono ∅ e X.
Quando si considera un sottospazio Y ⊂ X, allora Y è connesso se è connesso nella
topologia indotta da X. Osserviamo che se A ⊂ X è un sottoinsieme sia chiuso che aperto,
anche il suo complementare X ! A è sia chiuso che aperto. Quindi X = A ⊂ (X ! A), cioè X
è unione disgiunta di due aperti non vuoti.
(10.2) Teorema. Uno spazio topologico X è connesso se e solo se X non è unione di due
aperti non vuoti e disgiunti X = A1 ∪ A2 . (Equivalentemente: uno spazio topologico X non è
connesso se e solo se X è unione di due aperti non vuoti e disgiunti X = A1 ∪ A2 ).
(10.3) Esempio. Sia S 0 = {−1, +1} ⊂ R la sfera di dimensione 0 (soluzioni dell’equazione
x2 = 1). Entrambi i punti sono chiusi in R, e quindi chiusi in S 0 (che è chiuso in R): S 0 non
è connesso.
(10.4) Esempio. L’insieme vuoto e gli spazi con un solo punto sono connessi.
(10.5) Definizione. Un intervallo in R (più in generale: in un insieme ordinato) è un insieme
I ⊂ R contentente più di un punto, tale che x, y ∈ I, s ∈ R, x < s < y =⇒ s ∈ I.
Ricordiamo che m ∈ R è un minorante di un insieme di numeri X ⊂ R se ∀x ∈ X, m ≤ x
(cioè se m ≤ X). Analogamente, M ∈ R è un maggiorante di X se ∀x ∈ X, x ≤ M (cioè
se X ≤ M ). Si dice che X è limitato da sotto se esiste un minorante di X. Si dice che X è
limitato da sopra se esiste un maggiorante di X. L’insieme di tutti i minoranti di X è quindi
un insieme non vuoto se e solo se X è limitato da sotto. L’insieme di tutti i maggioranti di X
è un insieme non vuoto se e solo se X è limitato da sopra.
L’insieme dei minoranti di X si scrive come
minoranti = {m ∈ R : ∀x ∈ X, m ≤ x}
= {m ∈ R : ∀x ∈ X, m ∈ (−∞, x]}
!
= {m ∈ R : m ∈
(−∞, x]}
=
!
x∈X
11
In inglese: clopen.
x∈X
(−∞, x].
Geometria I
68
Dato che è l’intersezione di una famiglia di chiusi, è un sottoinsieme chiuso di R. L’insieme
dei maggioranti di X si scrive come
maggioranti = {M ∈ R : ∀x ∈ X, M ≥ x}
= {M ∈ R : ∀x ∈ X, M ∈ [x, +∞)}
!
= {M ∈ R : M ∈
[x, +∞)}
=
!
x∈X
[x, +∞).
x∈X
Dato che è l’intersezione di una famiglia di chiusi, è un sottoinsieme chiuso di R. L’estremo
inferiore è il massimo dei minoranti, l’estremo superiore è il minimo dei maggioranti.
Dato che R ha la proprietà dell’estremo superiore e dell’estremo inferiore, gli intervalli
sono tutti gli insiemi del tipo (−∞, b],(−∞, b),(a, b),(a, b], [a, b), [a, b], [a, +∞), (a, +∞), con
a < b. Mostreremo che tutti gli intervalli sono connessi. Cominciamo dall’intervallo chiuso
(compatto) [a, b].
(10.6) Teorema. Ogni intervallo chiuso [a, b] ⊂ R è connesso.
Dimostrazione. Per assurdo, supponiamo che l’intervallo [a, b] sia unione di due aperti disgiunti
non vuoti [a, b] = A1 ∪ A2 (dove A1 , A2 += ∅, A1 ∩ A2 = ∅, e quindi A1 e A2 sono chiusi nella
topologia di [a, b]). Essendo [a, b] chiuso in R, A1 e A2 sono anch’essi chiusi e non vuoti in R
(nota: non sono necessariamente aperti! Vedi esercizio (3.3)). Dato che gli estremi superiore
e inferiore di un sottoinsieme chiuso di R sono contenuti nell’insieme stesso (vedi esercizio
(3.2)), risulta sup Ai ∈ Ai , inf Ai ∈ Ai per i = 1, 2. Consideriamo per ogni y ∈ [a, b] l’insieme
chiuso
By = {x ∈ A1 : x ≤ y} = [a, y] ∩ A1 ⊂ A1 .
L’intersezione
B=
!
y∈A2
By = {x ∈ A1 : ∀y ∈ A2 , x ≤ y}.
è dunque un chiuso contenuto in A1 (che consiste di tutti i minoranti di A2 in A1 ). Ora,
a meno di cambiare gli indici, possiamo supporre che a ∈ A1 (e quindi a +∈ A2 , poiché
A1 ∩ A2 = ∅), e quindi a ∈ B. L’estremo superiore s1 = sup B (che esiste perché B += ∅ ed è
limitato) appertiene al chiuso B (e quindi è un minorante di A2 ), e dunque appartiene a A1
(che contiene B). D’altra parte, consideriamo l’estremo inferiore s2 di A2 , che appartiene a
A2 dato che A2 è chiuso: si ha che s2 ≤ t per ogni t ∈ A2 , e
t ∈ [a, b] ∧ t > s2 =⇒ ∃y ∈ A2 : t > y,
(cioè non esistono minoranti di A2 più grandi di s2 , s2 è il massimo dei minoranti). Quindi
s1 ≤ s2 , dato che gli elementi di B sono minoranti di A2 . In altre parole, B è contenuto
nell’insieme di tutti i minoranti di A2 , e quindi il massimo di B (cioè s1 ) non può essere piú
grande del massimo dei minoranti (cioè s2 ).
Geometria I
69
Ora, se s1 = s2 , si ha
A1 ⊃ B 0 s1 = s2 ∈ A2 =⇒ s1 = s2 ∈ A1 ∩ A2 ,
che è assurdo visto che A1 ∩ A2 = ∅. Dunque deve essere s1 < s2 .
Prendiamo dunque un s ∈ [a, b] compreso tra s1 e s2 :
sup B = s1 < s < s2 = inf A2 .
Dato che per definizione di s1 (estremo superiore di B)
t ∈ [a, b] ∧ t > s1 =⇒ t +∈ B,
il punto s non è in B. Inoltre s < s2 = inf A2 , e quindo s non può essere un elemento di
A2 (e dunque sta in A1 ), ed è un minorante di A2 . Ma questo significa che s ∈ B, il che è
assurdo.
qed
(10.7) Nota. Vedremo che il teorema precedente può essere generalizzato nel modo seguente:
Un sottoinsieme A ⊂ R con almeno due punti è connesso se e solo se è un intervallo. Per la
parte “solo se”, si cerchi di dimostrare (esercizio (5.5)) che se un insieme ha almeno due punti
e non è un intervallo, allora non è connesso (si veda anche la prossima nota).
(10.8) Nota. Usando la stessa tecnica di dimostrazione di (10.6), si può dimostrare che A ⊂ R
non è connesso se e solo se esistono x, y ∈ A, s +∈ A tali che x < s < y (cioè A è connesso se
e solo se x, y ∈ A, x < s < y =⇒ s ∈ A). Infatti, se A non fosse connesso, si definiscono A1 ,
A2 , B, s1 e s2 come sopra (s1 = sup B e s2 = inf A2 ), e deve risultare s1 < s2 . Ma allora esiste
s +∈ A tale che s1 < s < s2 – basta prendere s = 21 (s1 + s2 ). Questo fa seguire dall’ultimo
assioma di (7.1) la connessione di R. Viceversa, se esistono x, y ∈ A e s +∈ A tali che x < s < y,
allora si possono definire i seguenti sottoinsiemi (chiusi e aperti) di A:
A1 = {x ∈ A : x ≤ s} = {x ∈ A : x < s}
A2 = {x ∈ A : x ≥ s} = {x ∈ A : x > s}
la cui intersezione è vuota e la cui unione è A.
(10.9) Teorema. Se X è connesso e f : X → Y è una funzione continua, allora f (X) ⊂ Y è
connesso (con la topologia indotta da Y – si dice che l’immagine di un connesso è connessa).
Dimostrazione. Se f (X) fosse non connesso, esisterebbero A1 ⊂ f (X) e A2 ⊂ f (X) aperti
disgiunti (nella topologia indotta) e non vuoti tali che f (X) = A1 ∪ A2 . Le controimmagini
f −1 A1 e f −1 A2 sarebbero aperti disgiunti non vuoti in X tali che X = f −1 A1 ∪ f −1 A2 , e
dunque X non sarebbe connesso.
qed
(10.10) Corollario. Se X e Y sono due spazi topologici omeomorfi, allora X è connesso se
e solo se Y è connesso.
Geometria I
70
Dimostrazione. Come nella dimostrazione del corollario (7.18)
qed
Ricordiamo che S 0 = {±1} è lo spazio con due punti e la topologia discreta.
(10.11) Uno spazio X è connesso se e solo se ogni funzione continua f : X → S 0 è costante.
Dimostrazione. Supponiamo che X sia connesso. Allora la sua immagine è un sottospazio
connesso di S 0 . Dato che S 0 non è connesso, f X non può essere S 0 . Dato che f X += ∅, f X
ha esattamente un elemento, e quindi f è costante.
Viceversa, se X non è connesso allora esistono A1 , A2 aperti disgiunti non vuoti tali che
X = A1 ∪ A2 . Si definisca allora la funzione f : X → S 0 ponendo
"
+1 if x ∈ A1
f (x) =
−1 if x ∈ A2 .
La funzione è ben definita, dato che A1 ∩ A2 = ∅ e X = A1 ∪ A2 . È continua: basta osservare
che gli aperti di S 0 sono tutti i suoi sottoinsiemi ∅, {+1}, {−1}, S 0 , e la controimmagine di
ognuno di essi è aperto in X:
f −1 (∅) = ∅
f −1 ({+1}) = A1
f −1 ({−1}) = A2
f −1 (S 0 ) = X.
E non è una funzione costante.
qed
(10.12) Esempio. La funzione f : Q → {−1, 1}, definita ponendo
"
√
1
se x < 2
√
f (x) =
−1 se x > 2
è continua su Q.
(10.13) (Teorema del valore intermedio) Sia f : [a, b] ⊂ R → R una funzione continua tale
che f (a) < 0 e f (b) > 0. Allora esiste x0 ∈ (a, b) tale che f (x0 ) = 0.
Dimostrazione. L’intervallo [a, b] è connesso per (10.6), e quindi la sua immagine
f ([a, b]) = {f (x) : a ≤ x ≤ b}
è connessa, e dunque un intervallo (vedi anche (10.8)). Cioè, visto che f (a) ∈ f ([a, b]) e
f (b) ∈ f ([a, b]), anche tutti i valori intermedi y ∈ [f (a), f (b)] appartengono all’immagine
f ([a, b]). In particolare, 0 ∈ [f (a), f (b)], e quindi 0 ∈ f ([a, b]), cioè esiste x ∈ [a, b] tale che
f (x) = 0.
qed
Geometria I
71
(10.14) Esempio (Bisezione). Applichiamo (10.13) ad un caso concreto: determinare in
modo costruttivo √una successione di razionali che converge a un irrazionale. Osserviamo per
esempio che q = 22 ∈ [0, 1] risolve l’equazione 2x2 = 1, per cui non è un razionale (occorre
che si sappia dimostrarlo!). Non solo, è anche l’unico punto di [0, 1] che risolve l’equazione
(perché?). Ora costruiamo per ricorsione una successione di intervalli [an , bn ] di lunghezza 2−n
con la proprietà che
2a2n − 1 < 0 < 2b2n − 1
nel modo seguente. Per n = 0, poniamo
"
a1
b1
Si ha 2 · 02 − 1 < 0 < 2 · 12 − 1, e
0 = a1 <
=0
= 1.
√
2
< b1 = 1
2
dato che
1
< 12 .
2
2
Supponiamo di avere definito [an−1 , bn−1 ], entrambi razionali tali che 2a2n−1 − 1 < 0 <
√2bn−1 −
an−1 + bn−1
2
1. Allora c =
è ancora razionale, e quindi non può essere uguale a
che è
2
2
2
2
irrazionale. Ma allora 2c − 1 += 0, visto che in [0, 1] c’è un’unica soluzione di 2x − 1 = 0. Si
hanno quindi solo due casi, in cui si pone
"
[c, bn−1 ] se c < 0;
[an , bn ] =
[an−1 , c] se c > 0.
02 <
In entrambi i casi la lunghezza è la metà di quella di [an−1 , bn−1 ], cioè la metà di 2−(n−1)
(ipotesi di induzione), che è 12 2−n+1 = 2n ; inoltre
"
c < 0 =⇒ 2a2n − 1 = 2c2 − 1 < 0 < 2b2n − 1 = 2b2n−1 − 1,
c > 0 =⇒ 2a2n − 1 = 2a2n−1 − 1 < 0 < 2c2 − 1 = 2b2n − 1.
Quindi la successione è ben definita. Osserviamo che per ogni n ≥ 0 si ha [an , bn ] ⊂ [an−1 , bn−1 ].
Dato che per √
ogni n si ha q ∈ [an , bn ], si ha quindi che sia an che bn sono numeri che
approssimano 2/2 a meno di 2−n , cioè
√
√
2
2
|
− an | < 2−n , |
− bn | < 2−n .
2
2
√
Questo segue dal fatto che 2/2 ∈ [an , bn ] e che bn − an < 2−n .
Geometria I
72
(10.15) Nota. È possibile implementare facilmente questo algoritmo, per avere approssimazioni dell’ordine 2−n , per ogni n, in qualche linguaggio che possa fare operazioni su frazioni
senza limiti sulla grandezza dei numeratori/denominatori coinvolti (altrimenti prima o poi per
il calcolatore 2−n = 0). Meglio sarebbe se fosse direttamente in grado di eseguire operazioni
tra frazioni. Ma anche supponendo di poter eseguire solo operazioni su interi di grandezza
arbitraria, è possibile definire in modo semplice somme e prodotti di frazioni (come?); risulta
un po’ più efficiente se si sa come ridurre le frazioni ai minimi termini (dividendo numeratore
√
e denominatore per il massimo comun divisore). In altre parole, fissato per esempio q = 2/2
dovrebbe essere possibile scrivere un programma che per k assegnato calcola in modo esatto
tutte le prime k cifre decimali di q (si veda anche la nota (8.9) a pagina 54).12
(10.16) Definizione. Definiamo componenti connesse di uno spazio topologico X i sottospazi connessi massimali (cioè i sottospazi connessi di X che non sono contenuti in sottospazi
connessi di X).
L’insieme dei sottospazi connessi di X è parzialmente ordinato, rispetto all’inclusione di
sottoinsiemi. Un elemento massimale è un sottospazio connesso Y che non è contenuto in
nessun sottospazio connesso di X. Ogni elemento x ∈ X è contenuto in un tale Y : infatti,
{x} è connesso. Se {x} non è contenuto in nessun connesso piú grande, allora {x} stesso è
massimale e basta porre {x} = Y . Altrimenti, x appartiene ad un connesso piú grande. È
vero che un connesso massimale che contiene x esiste sempre? È vero che ne esiste uno solo?
È vero che quindi X si decompone in una unione disgiunta di componenti connesse?
12
Lo studente interessato potrebbe provare a calcolare le prime 200 cifre di π utilizzando per esempio lo
sviluppo (è solo uno dei molti metodi possibili)
arctan x =
n
#
k=0
(−1)k
x2k+1
+ rn
2k + 1
con resto |rn | < x2n+3 /(2n + 3) e l’identità
π
= arctan 1.
4
1
è minore di 10−200 quando 2n + 3 > 10200 , forse occorrono un po’ troppi termini. Roadrun2n + 3
ner, il supercomputer più potente del mondo, supera il petaflop/s, cioè è in grado di eseguire 1105 teraflop/s
(cioè approssimativamente 1015 FLoating point Operations Per Second). Ogni termine della somma richiede
certamente più di una operazione (e non è detto che si usino float: a volte bastano gli interi), ma in ogni caso
con questa formula occorrerebbero a Roadrunner non meno di 10185 secondi per terminare, cioè non meno di
3 · 10177 anni. Tenuto conto che l’età stimata dell’universo è intorno ai 14 · 109 anni, il metodo è destinato al
fallimento. Usando invece identità del tipo (formule di Machin)
Dato che
π
1
1
1
1
1
= arctan + arctan = arctan + arctan + arctan
4
2
3
2
5
8
è possibile sommare un numero ragionevole di termini. Lo studente interessato può provare a calcolare le prime
200 cifre di π con questo metodo, e anche a dimostrare le identità usate.
Geometria I
73
(10.17) Esempio. Uno spazio X è connesso se e solo se ha una sola componente connessa.
Le componenti connesse di Q sono . . .
(10.18) Teorema. Le componenti connesse di Q ⊂ R sono i suoi punti.
(10.19) Siano B ⊂ X e {Yw }w∈W sottoinsiemi$
connessi di uno spazio topologico X tali che
∀w ∈ W, B ∩ Yw += ∅. Allora l’unione Y = B ∪
Yw è connesso.
w∈W
Dimostrazione. Basta dimostrare che ogni funzione continua f : Y → {±1} è costante. Dato
che B è connesso, la restrizione f |B è continua e quindi per (10.11) è costante. Quindi esiste
y ∈ S 0 tale che f (b) = y, per ogni b ∈ B. Ora, per ogni w ∈ W lo spazio Yw è connesso, e
quindi la restrizione f |Yw è una funzione costante dato che è continua. Ma Yw ∩ B += ∅, quindi
esiste b ∈ Yw ∩ B, e deve essere f (Yw ) = {f (b)} = {y}. Quindi per ogni x ∈ Y si ha f (x) = y,
cioè f è costante.
Vediamo un’altra dimostrazione. Supponiamo che A1 e A2 siano aperti disgiunti tali che
Y = A1 ∪ A2 . Per ogni w ∈ W , A1 ∩ Yw e A2 ∩ Yw sono aperti disgiunti in Yw , e quindi non
possono essere entrambi non vuoti, visto che Yw è connesso: cioè, Yw ⊂ A1 oppure Yw ⊂ A2 .
Lo stesso per A1 ∩ B e A2 ∩ B: supponiamo senza perdere in generalità che B ⊂ A1 . Ma
allora, poiché per ipotesi B ∩ Yw += ∅, deve anche essere ∀w ∈ W, Yw ⊂ A1 , e cioè Y ⊂ A1 . Ma
allora A2 = ∅.
qed
(10.20)
Corollario.
%
& Siano Aw , per w ∈ W , sottospazi connessi di uno spazio X tali che
w Aw += ∅. Allora
w Aw è connesso.
Dimostrazione. Basta prendere uno degli Aw e chiamarlo B: per ogni w$ ∈ W
!
∅=
+
Aw ⊂ Aw! ∩ B,
w
e quindi si può applicare il lemma precedente.
qed
(10.21) Nota (Componenti connesse). Per ogni x ∈ X sia Cx l’unione di tutti i sottospazi
connessi di X che contengono x
$
Cx =
Y
Y connesso
x∈Y ⊂X
Dato che {x} è connesso e contiene x, l’insieme Cx contiene x. Per (10.19), questa unione
è un sottoinsieme connesso di X che contiene x. Non può essere contenuto propriamente in un
connesso piú grande, perché se cosí fosse sarebbe contenuto propriamente in un connesso che
contiene x, e dunque sarebbe contenuto propriamente in sé stesso. Quindi Cx è una componente
connessa (secondo la definizione (10.16)). Osserviamo che se z ∈ Cx , allora Cz = Cx : infatti se
Cz è un connesso massimale che contiene z, dato che anche Cx ∪ Cz contiene z (ed è connesso
per (10.19)), deve essere Cx ∪ Cz ⊂ Cz , cioè Cx ⊂ Cz . Analogamente, Cz ∪ Cx ⊂ Cx , dato
che è un connesso e contiene x, e quindi Cz ⊂ Cx . Due componenti connesse o sono disgiunte
Geometria I
74
oppure coincidono: infatti se si ha Cx ∩Cy += ∅, esiste z ∈ Cx ∩Cy , e quindi Cz = Cx e Cz = Cy ,
da cui Cx = Cy . Quindi ogni x ∈ X è contenuto in una e una sola componente connessa di
X: X è l’unione disgiunta delle sue componenti connesse.
(10.22) Corollario. Se I ⊂ R è un intervallo, allora I è connesso.
Dimostrazione. Per definizione I ha più di un punto, e se x, y ∈ I, allora x < s < y =⇒ s ∈ I.
Siano x1 e x2 due punti di I, e x0 = 21 (x1 + x2 ). Allora x1 < x0 < x2 e quindi x0 ∈ I, da cui
segue che
$
I=
[a, b],
a∈I, b∈I
a<x0 <b
visto che x ∈ I =⇒ x ∈ [x, x2 ] (se x < x0 ) oppure x ∈ [x1 , x] (se x > x0 ), oppure x ∈ [x1 , x2 ]
(se x = x0 ). Ora, se a ∈ I, b ∈ I e a < x0 < b, allora x0 ∈ [a, b], quindi la tesi segue da (10.19)
ponendo B = {x0 } e Yw = [a, b] con w ∈ W = {(a, b) ∈ I 2 : a < x0 < b}.
qed
(10.23) Corollario. La retta reale R è connessa.
Dimostrazione. Basta osservare che si può scrivere R = {0}∪
oppure direttamente il corollario (10.22).
&
R>0 [−R, R]
e applicare (10.19),
qed
(10.24) Teorema. I sottoinsiemi connessi di R sono tutti e soli gli insiemi con un elemento
solo e gli intervalli.
Dimostrazione. Per (10.22) gli intervalli sono connessi, e i punti sono sempre connessi. Ora,
un insieme X ⊂ R con più di due punti che non sia un intervallo è tale che esistono x, y ∈ X
e s ∈ R tali che x < s < y ma s +∈ X, e quindi
X = [ X ∩ (−∞, s)] ∪ [X ∩ (s, +∞)] ,
cioè unione disgiunta di due aperti non vuoti, e quindi X non è connesso.
qed
(10.25) Esempio. Rn è connesso: è unione di rette per l’origine. Rn ! {0} è connesso.
Perché? Vedi esercizio (5.2).
(10.26) Teorema. Due spazi topologici X e Y sono connessi se e solo se il prodotto X × Y
è connesso.
Dimostrazione. Se X × Y è connesso, allora X e Y , in quanto immagini delle proiezioni
canoniche p1 : X × Y → X e p2 : X × Y → Y , sono connessi (vedi (10.9)). Viceversa, se X
e Y sono connessi, allora si scelga y0 ∈ Y : per ogni x ∈ X i sottospazi {x} × Y ⊂ X × Y e
X × {y0 } ⊂ X × Y sono omeomorfi rispettivamente a Y e X, e quindi entrambi connessi. Ma
allora
$
X × Y = X × {y0 } ∪
({x} × Y ),
x∈X
e quindi possiamo applicare (10.19) con B = X × {y0 } e Yx = {x} × Y .
qed
Geometria I
75
(10.27) Proposizione. Se A ⊂ X è connesso, allora la chiusura A di A in X è connesso.
Dimostrazione. Per (10.11), basta mostrare che ogni funzione continua f : A → {±1} è costante. Ma la restrizione di f ad A è costante e quindi f (A) è un solo punto: supponiamo
che sia uguale a 1 (altrimenti sostituiamo f con −f ). Per (2.10)-2 (pagina 7), f (A) ⊂ f (A),
e quindi
f (A) ⊂ f (A) = {1} = {1},
cioè f è costante anche sulla chiusura A.
qed
(10.28) Corollario. Ogni spazio topologico X è unione disgiunta delle sue componenti connesse. Ogni componente connessa è chiusa in X.
Dimostrazione. Abbiamo visto sopra che X è unione disgiunta delle sue componenti connesse.
Se Cx è una componente connessa, allora C x non può essere più grande di Cx , e quindi
Cx = C x .
qed
§ 10.1
Spazi connessi per archi
Cfr: Sernesi Vol II, Cap III, §12 [1].
Un arco (oppure un cammino) in uno spazio X è una mappa (funzione continua) γ : [0, 1] →
X. Si dice che l’arco parte da γ(0) e arriva a γ(1).
(10.29) Definizione. Si dice che uno spazio X è connesso per archi se per ogni coppia di
punti x0 , x1 ∈ X esiste un arco γ tale che γ(0) = x0 e γ(1) = x1 .
(10.30) Se f : X → Y è una funzione suriettiva e X è connesso per archi, allora Y è connesso
per archi.
Dimostrazione. Siano y0 , y1 due punti di Y . La funzione è suriettiva, e dunque esistono x0
e x1 in X tali che f (x0 ) = y0 e f (x1 ) = y1 . Dato che X è connesso, esiste un cammino
γ : [0, 1] → X tale che γ(0) = x0 e γ(1) = x1 . Ma la composizione di funzioni continue è
continua, e quindi il cammino ottenuto componendo γ con f : f ◦ γ : [0, 1] → X → Y è un
cammino continuo che parte da y0 e arriva a y1 .
qed
(10.31) Corollario. Se due spazi X e Y sono omeomorfi, allora X è connesso per archi se
e solo se Y è connesso per archi.
Dimostrazione. Si dimostra come nel caso della connessione e della compattezza (7.18). qed
(10.32) Teorema. Uno spazio connesso per archi è connesso.
Geometria I
76
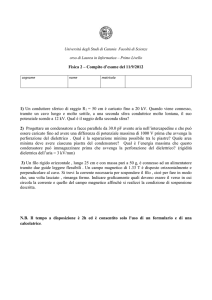
(0, 12 )
Figura 1: La pulce e il pettine dell’esempio (10.36).
Dimostrazione. Sia X uno spazio connesso per archi. Supponiamo che non sia connesso, e
dunque che esista A ⊂ X, A += ∅, A += X sia aperto che chiuso. Dato che A += ∅, possiamo
scegliere un punto x0 ∈ A. Dato che A += X, possiamo scegliere un punto x1 +∈ A. Dato che X
è connesso, esiste un cammino γ : [0, 1] → X che parte da x0 e arriva a x1 . La controimmagine
γ −1 (A) è un sottoinsieme chiuso di [0, 1] (dato che γ è continua e A è chiuso) ed al tempo
stesso un sottoinsieme aperto (dato che γ è continua e A aperto). Ma [0, 1] è connesso, quindi
γ −1 A può solo essere ∅ oppure tutto [0, 1]. Ma x0 ∈ γ −1 A, e quindi γ −1 A += ∅, e x1 +∈ γ −1 A, e
quindi γ −1 A += [0, 1], e questo ci porta ad una contraddizione.
qed
(10.33) Teorema. Se X è un sottoinsieme aperto e connesso di Rn , allora X è connesso per
archi.
Dimostrazione. Vedi esercizio (5.20)
qed
(10.34) Proposizione. I sottoinsiemi connessi di R sono connessi per archi.
(10.35) Proposizione. Non è vero in generale che se X è connesso allora è connesso per
archi.
La dimostrazione (opzionale) è data dal seguente esempio.
(10.36) Esempio (La pulce e il pettine). Sia A ⊂ R2 il seguente insieme (con la topologia
euclidea di R2 ):
1
A = {( , y) : 0 ≤ y ≤ 1, n ≥ 1 intero} ∪{ (x, 0) : 0 < x ≤ 1}.
n
Applicando (10.19) si vede che A è connesso. È anche connesso per archi: per esempio c’è un
cammino che collega tutti i punti di A con (1, 0) ∈ A.
Se P denota il punto di coordinate (0, 12 ), allora anche lo spazio X = {P } ∪ A è connesso:
infatti P è di accumulazione per A in R2 , e quindi la chiusura di A in X coincide con X. Ma
Geometria I
77
10
5
-20
-15
-10
-5
0
5
10
15
20
-5
-10
Figura 2: Figura per l’esempio (10.37).
per (10.27) la chiusura di A in X è connesso, visto che lo è A, e quindi X è connesso perché
coincide con la chiusura di A in X.
Non è connesso per archi: sia γ : I → X una funzione continua tale che γ(0) = P e γ(1) +=
P . Le componenti di γ sono due funzioni continue (x(t), y(t)). Sia m = sup{t ∈ I : x(t) = 0}
(l’estremo superiore esiste dato che x(0) = 0). Per continuità, si ha x(m) = 0 e y(m) = 21
(cioè γ(m) = P ). Visto che γ(1) += P e P è il solo punto con ascissa nulla, si ha x(1) > 0
e quindi m < 1. Si prenda m$ tale che m < m$ ≤ 1. Se m$ − m è abbastanza piccolo, si ha
che y(t) è abbastanza vicino a 12 per ogni t ∈ [m, m$ ]: supponiamo quindi che m$ − m è cosí
piccolo (ma positivo) da far sí che per ogni t ∈ [m, m$ ] si abbia y(t) ≥ 14 . Osserviamo che per
costruzione comunque x(m$ ) > 0; l’insieme
B = {x(t) : m ≤ t ≤ m$ }
è l’immagine dell’intervallo chiuso [m, m$ ] mediante la funzione continua x(t), e quindi è un
intervallo (perché connesso) chiuso (perché compatto), cioè è della forma
B = {x(t) : m ≤ t ≤ m$ } = [0, M ],
dove M è il massimo di x(t) in [m, m$ ] e risulta M > 0.
Ma ogni punto di γ([m, m$ ]) ha ordinata maggiore di 41 , e quindi deve avere ascissa uguale
a un valore del tipo n1 con n intero, e dunque B non può essere un intervallo del tipo [0, M ].
È quindi assurdo supporre che γ(1) += P , cioè tutti i cammini continui con γ(0) = P sono
costanti in P : segue che X non è connesso per archi.
(10.37) Esempio. Il sottoinsieme X ⊂ R2 definito da
X = {(x, y) ∈ R2 : x + y + xy += 1}
Geometria I
78
è un aperto di R2 , quindi è connesso per archi se e soltanto se è connesso. Non è connesso,
dato che la sua immagine in R mediante la funzione continua f (x, y) = x + y + xy non è un
intervallo (e quindi non è connesso) perché contiene i due punti f (2, 0) = 2 e f (0, 0) = 0, ma
non 1 che è intermedio. Osserviamo che X è l’unione disgiunta dei due aperti A1 e A2 non
vuoti definiti da
A1 = {(x, y) ∈ R2 : x + y + xy > 1}
A2 = {(x, y) ∈ R2 : x + y + xy < 1}.
Verifichiamo che A2 è connesso per archi (e quindi connesso): se (x1 , y1 ) ∈ A2 , allora il
cammino γ(t) definito per t ∈ [0, 1] da
γ(t) = (−1 + t(x1 + 1), −1 + t(y1 + 1))
parte da γ(0) = (−1, −1) e arriva a γ(1) = (x1 , y1 ). Per ogni t ∈ [0, 1] si ha
(−1 + t(x1 + 1)) + (−1 + t(y1 + 1)) + (−1 + t(x1 + 1))(−1 + t(y1 + 1))
= −1 + t2 (x1 + y1 + x1 y1 + 1)
< −1 + t2 (1 + 1) = 2t2 − 1
≤ 2 − 1 = 1,
e quindi γ(t) ∈ A2 .
Invece A1 non è connesso: si può scrivere come unione di aperti disgiunti non vuoti A+
1 e
−
A1 definiti da
2
A+
1 = {(x, y) ∈ R : x + y + xy > 1 ∧ x + y > 0}
2
A−
1 = {(x, y) ∈ R : x + y + xy > 1 ∧ x + y < 0}.
Sono ovviamente disgiunti, inoltre x + y + xy > 1 =⇒ x + y += 0 (perché?), e quindi
−
+
−
A1 = A+
1 ∪A1 . Verifichiamo che A1 e A1 sono connessi per archi, e quindi connessi. Cambiamo
coordinate in R2 , e prendiamo le nuove coordinate a = x + 1, b = y + 1 (è un omeomorfismo
R2 ≈ R2 ). Allora nella coordinate (a, b) si ha
2
A+
1 ≈ {(a, b) ∈ R : ab > 2 ∧ a + b > 2}.
Definiamo γ(t) = (a1 + b1 − tb1 , a1 + b1 − ta1 ). Si ha
γ(0) = (a1 + b1 , a1 + b1 )
γ(1) = (a1 , b1 ).
Inoltre per ogni t ∈ [0, 1] si ha a1 > 0, b1 > 0 e quindi
(a1 + b1 − tb1 )(a1 + b1 − ta1 )
≥ a1 b 1 > 2
a1 + b1 − tb1 + a1 + b1 − ta1 = (2 − t)(a1 + b1 ) ≥ (a1 + b1 ) > 2,
Geometria I
79
quindi γ(t) ∈ A+
1 . Definiamo ora un’altro cammino η(t) ponendo per t ∈ [0, 1]
η(t) = (2 + t(a1 + b1 − 2), 2 + t(a1 + b1 − 2)).
Si ha
Dato che
η(0) = (2, 2)
η(1) = (a1 + b1 , a1 + b1 ).
(t, t) ∈ {(a, b) ∈ R2 : ab > 2 ∧ a + b > 2}
se e soltanto se t2 > 2, per mostrare che η(t) ∈ A+
1 occorre mostrare che
(2 + t(a1 + b1 − 2))2 > 2.
Ma questo segue dal fatto che a1 + b1 > 2, quindi 2 + t(a1 + b2 − 2) > 2, e quindi il suo
quadrato è maggiore di 2. Nelle coordinate a, b, quindi possiamo definire il cammino α(t) in
A+
1 ponendo
"
η(2t)
se t ∈ [0, 1/2]
α(t) =
γ(2t − 1) se t ∈ [1/2, t],
−
che collega (2, 2) con qualsiasi punto (a1 , b1 ) di A+
1 . Per A1 si procede allo stesso modo
−
(esercizio). Concludiamo quindi dicendo che X ha tre componenti connesse: A2 , A+
1 e A1
(c’era una dimostrazione più veloce?).
Geometria I
80
Optional: construzione di R (Dedekind)
(-2.1) Consideriamo il sottoinsieme Q ⊂ Q dei numeri razionali positivi o nulli: Q = {x ∈
Q : x ≥ 0}. Lo scopo di questo esercizio (e dei seguenti) è di rivisitare la costruzione delle
sezioni di Dedekind in termini di connessione (così come la costruzione di Cantor dei numeri
reali come completamento di Q è fatta in termine di convergenza di successioni di Cauchy).13
Sappiamo che Q e Q non sono connessi (perché?): esistono quindi due aperti-e-chiusi non
vuoti A1 ,A2 ⊂ Q tali che A1 ∪ A2 = Q. Definiamo le sezioni di Q come segue: una sezione
α ⊂ Q è un intervallo aperto e limitato di Q contenente lo 0, cioè
(i) 0 ∈ Q;
(ii) p ∈ α =⇒ ∃$ > 0, B! (p) ⊂ α (α è aperto).
(iii) p ∈ α =⇒ [0, p) ⊂ α (α è un intervallo che contiene lo 0);
(iv) α è limitato (equivalentemente, α += Q, dal momento che α è un intervallo che contiene
0).
Dimostrare che le sezioni (definite come sopra) soddisfano le seguenti proprietà:
(i) α non è vuoto e α += Q;
(ii) Se p ∈ α e q ∈ Q e q < p allora q ∈ α;
(iii) Se p ∈ α allora p < r per qualche r ∈ α.
(-2.2) Sia S l’insieme di tutte le sezioni di Q. Consideriamo la funzione f : Q ! {0} →S
definita da f (q) = α = [0, q), per ogni q ∈ Q ! {0}. Dimostrare che è iniettiva (non è definita
in 0).
*(-2.3) Dimostrare che la relazione di inclusione α < β ⇐⇒ α ⊂ β ∧ α += β è una relazione
di ordine totale su Q, cioè:
(i) Se α e β sono sezioni in S, allora una sola delle relazioni seguenti è vera: α < β, β < α,
β = α.
(ii) (proprietà transitiva): se α, β e γ sono in S, e α < β ∧ β < γ, allora α < γ.
*(-2.4) Dimostrare che l’insieme delle sezioni S ha la proprietà dell’estremo superiore: ogni
insieme non vuoto e limitato in S ammette estremo superiore. (Suggerimento:
se A ⊂ S è
&
un insieme limitato e non vuoto, allora si può definire l’unione U = α∈A α – le sezioni sono
sì elementi di S, ma sono anche intervalli di numeri razionali, e quindi è possibile definire
l’unione. . . poi si dimostra che l’unione in effetti è una sezione, e quindi U ∈ S . . . è un
maggiorante di A, ed è poi possibile vedere che è il minimo dei maggioranti. . . )
13
Questa non è la costruzione dei reali con le sezioni di Dedekind.
Geometria I
81
*(-2.5) Ora dobbiamo mostrare che la somma e il prodotto, definite in Q, si estendono a S.
Definiamo la somma come
α + β = {a + b : a ∈ α, b ∈ β}
e il prodotto come
αβ = {ab : a ∈ α, b ∈ β}.
Dimostrare che la somma e il prodotto di sezioni sono ancora sezioni. Dimostrare che la funzione f dell’esercizio (-2.2) conserva le operazioni di somma, prodotto e la relazione d’ordine:
f (p + q) = f (p) + f (q), f (pq) = f (pq), p < q =⇒ f (p) < f (q).
*(-2.6) Dimostrare che se α, β ∈ S, e α < β, allora esiste un unico γ ∈ S tale che β = α + γ.
(-2.7) Dimostrare che se α ∈ S, allora esiste un unico β tale che αβ = 1 (dove identifichiamo
1 = [0, 1) = f (1).
*(-2.8) Ora siano S + e S − due copie di S, e sia R = S − ∪ {0} ∪S + . Se α ∈ S, allora
indicheremo con +α (o anche semplicemente con α) l’elemento corrispondente in S + , e con
−α l’elemento corrispondente di S − . Definire operazioni di addizione, moltiplicazione e la
relazione d’ordine su R in modo che R risulti un campo ordinato.
*(-2.9) Mostrare che la funzione f di (-2.2) si estende in modo naturale ad una inclusione di
campi
Q ⊂ R.
(Vale la pena di concludere osservando che R = R. . . ).
Geometria I
82
Figura 3: Topologie con tre punti
Esercizi: foglio 5
*(5.1) Dimostrare (direttamente) che gli intervalli semiaperti [a, b) sono connessi, così come
gli intervalli (−∞, a), (−∞, a], (a, ∞) e [a, ∞) (vedi teorema (10.6) e (10.19)).
(5.2) Dimostrare che Rn ! {0} è connesso.
(5.3) Dimostrare che i punti di uno spazio topologico sono connessi.
(5.4) Dimostrare che Q non è connesso. Quali sono le sue componenti connesse? (Nota: Q
non ha la topologia discreta!)
(5.5) Dimostrare che i sottoinsiemi connessi non vuoti di R sono tutti e soli i singoli punti e
gli intervalli (dove diciamo che un sottoinsieme A ⊂ R è un intervallo se contiene almeno due
punti distinti e se x, y ∈ A, x < s < z =⇒ s ∈ A).
(5.6) Sia X un insieme con almeno due elementi. Quali sono i sottoinsiemi connessi, se X ha
la topologia discreta? E se ha la topologia banale?
(5.7) Se X è connesso e Y ha meno aperti di X, allora è vero che anche Y è connesso?
Utilizzare questo fatto per determinare nel grafo (cfr. figure 4 e ?? a pagg. 83 e ??) delle
classi di omoeomorfismo di spazi topologici finiti su 3 e 4 punti quali sono quelli connessi. Tra
tutti gli spazi topologici finiti (a meno di omeomorfismo) con 3 o 4 punti, quanti sono quelli
connessi?
Geometria I
83
Figura 4: Topologie con quattropunti
(5.8) Determinare quali dei seguenti sottospazi di R2 sono connessi:
(i) {(x, y) ∈ R2 : x2 + y 2 < 1}.
(ii) {(x, y) ∈ R2 : x2 + y 2 = 1}.
(iii) {(x, y) ∈ R2 : x2 + y 2 += 1}.
*(5.9) Supponiamo che f : X → Z sia una funzione continua (dove Z, con la topologia indotta
da R, ha la topologia discreta) e non costante. Dimostrare che X non è connesso.
*(5.10) Dimostrare che Rn ! {0} è connesso per n ≥ 2. Dedurne che la sfera di dimensione n
S n e il piano proiettivo P2 (R) sono connessi.
(5.11) In uno spazio topologico X si consideri la seguente relazione: x ∼ y ⇐⇒ ∃C ⊂ X
connesso tale che x ∈ C 0 y. Mostrare che è una relazione di equivalenza. Mostrare poi che le
classi di equivalenza sono le componenti connesse di X. Dedurre che le componenti connesse
(definite in (10.16)) di uno spazio topologico sono ben definite e disgiunte (cfr. nota (10.21)).
*(5.12) Sia X l’unione dei sottospazi A e B di R2 definiti da A = {(x, y) ∈ R2 : x = 0 ∧ −1 ≤
y ≤ 1} e B = {(x, y) ∈ R2 : y = cos x1 ∧ 0 < x ≤ 1}. Dimostrare che X è connesso.
(Suggerimento: uno è nella chiusura dell’altro)
Geometria I
1
84
y
0.5
0
0
0.2
0.4
0.6
0.8
x
1
-0.5
-1
*(5.13) Siano A = {(x, y) : 12 ≤ x ≤ 1, y = 0} e B = {(x, y) : y = nx , 0 ≤ x ≤ 1 per qualche n ∈ N}.
Dimostrare che X = A ∪ B è connesso.
1.2
y
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
x
1
-0.2
(5.14) Sia S n = {x ∈ Rn+1 : |x|2 = 1}. Dimostrare che S n è connesso. (Suggerimento:
Rn ! {0} è connesso)
*(5.15) Dimostrare che S 1 non è omeomorfo ad un intervallo. (Suggerimento: S 1 meno un
punto . . . )
*(5.16) Dimostrare che gli intervalli (0, 1) e [0, 1) non sono omeomorfi.
(5.17) Dimostrare che uno spazio topologico X è connesso se e solo se ogni volta che si scrive
come X = A ∪ B con A += ∅ e B += ∅ allora A ∩ B += ∅ oppure B ∩ A += ∅.
(5.18) Dimostrare che se S ⊂ R non è un intervallo (cioè se esistono x, y, z con x < s < y,
x, y ∈ S e s +∈ S ) allora S non è connesso.
Geometria I
85
(5.19) Mostrare che se uno spazio topologico X è unione di aperti connessi disgiunti e non
vuoti, allora questi sono le componenti connesse di X. Dimostrare poi che se X ha un numero
finito di componenti connesse allora esse sono sia aperte che chiuse e disgiunte. Trovare un
esempio di spazio con infinite componenti connesse tutte chiuse ma mai aperte.
*(5.20) Dimostrare che se X ⊂ Rn è un sottoinsieme aperto e connesso di Rn , allora è anche
connesso per archi. (Suggerimento: osservare che i cammini si possono comporre nel seguente
modo: se γ : [0, 1] → X è un cammino che va da x0 ∈ X a x1 ∈ X, e γ $ : [0, 1] → X un
secondo cammino che va da x1 a x2 , allora γ $ può essere riparametrizzato (utilizzando un
omeomorfismo [0, 1] ≈ [1, 2]) come γ $$ : [1, 2] → X. Ma allora è possibile definire un nuovo
cammino α : [0, 2] → X “incollando” i due cammini – e verificare che è ancora continuo.
Ora non rimane che dimostrare la seguente cosa: se si sceglie x0 ∈ X, lo spazio di tutti i
punti raggiungibili con un cammino che parte da x0 è un aperto (“incollando” al cammino un
pezzettino di cammino rettilineo. . . ), ma è anche un chiuso (cioè lo spazio di tutti i punti non
raggiungibili con un cammino che parte da x0 è un aperto) . . . )
(5.21) Sia X uno spazio topologico, e ∼ la seguente relazione in X: x ∼ y se e solo se esiste
cammino γ : [0, 1] → X che parte da x e arriva a y. Dimostrare che la relazione “∼” è di
equivalenza. Cosa sono le classi di equivalenza?
Ricordiamo che nel sistema posizionale con base b all’allineamento
(an . . . a3 a2 a1 a0 .a−1 a−2 . . .)b
(finito a sinistra) corrisponde il numero reale
an bn + . . . + a3 b3 + a2 b2 + a1 b1 + a0 + a−1 b−1 + a−2 b−2 + . . . .
In generale si ha che 0 ≤ an < b, ma ci sono sistemi in cui questo non è richiesto (vedi
l’esercizio (5.23 )).
*(5.22) Sia C ⊂ [0, 1] ⊂ R l’insime di numeri reali compresi tra 0 e 1 che hanno uno sviluppo in
base ternaria (con cifre 0, 1, 2) in cui non compare mai il la cifra 1 (quando la rappresentazione
non è unica, come per esempio quando l’ultima cifra è 2 periodica (0.2̄)3 = (1.0)3 oppure
(0.12̄)3 = (0.2)3 , basta che per una delle due rappresentazioni sia vero che non compare la
cifra 1). L’insieme C si chiama insieme di Cantor. Mostrare che
(i) C è chiuso;
(ii) C è compatto;
(iii) se x ∈ C, allora x è di accumulazione per il complementare di C.
(iv) se x ∈ C, allora x è di accumulazione per C ma non è interno a C.
(v) se Y ⊂ C è un sottospazio connesso e Y += ∅, allora Y ha un solo elemento (cioè l’insieme
di Cantor è totalmente sconnesso, come Q).
(vi) (opzionale) Mostrare che C è omeomorfo allo spazio 2N (con la topologia prodotto).
Geometria I
86
**(5.23) Nella notazione posizionale ternaria bilanciata invece degli allineamenti in base 3 (con
i simboli 0, 1, 2) si considerano gli allineamenti dei tre simboli 1, 0, 1 (che corrispondono agli
interi −1,0,1) in base 3. Nel sistema ternario si ha che 0 ≤ an < 3, ma nel sistema ternario
bilanciato si pone −1 ≤ an ≤ 1, e si indica 1 = −1 per semplicità (negli anni 1950-1960,
per un certo periodo il sistema ternario bilanciato è stato preso seriamente in considerazione,
insieme al sistema decimale e al sistema binario, per la costruzione di calcolatori elettronici –
per esempio dal gruppo di S.L. Sobolev a Mosca).
(i) Quanto valgono (0.1̄)3 , (0.01̄)3 , (0.1̄)3 e (0.01̄)3 ?
(ii) È vero che ogni x ∈ R può essere scritto in notazione ternaria bilanciata?
(iii) La rappresentazione è unica? L’insime degli x che non hanno una rappresentazione unica
è chiuso in R? (osservare che se x non ha una rappresentazione unica, allora nemmeno
x/3 e x ± 1 hanno una rappresentazione unica e quindi h+1/2
...)
3k
(iv) Sia X l’insieme dei numeri reali in [− 12 , 12 ] che ha almeno una rappresentazione ternaria
bilanciata in cui non compare mai la cifra 1. Ha le stesse proprietà dell’insieme di
Cantor (dell’esercizio precedente, cioè è compatto, totalmente sconnesso e ogni punto è
di accumulazione sia per X che per il complementare di X)?
*(5.24) Sia f : X ⊂ R → R una funzione continua definita su un intervallo (connesso) X ⊂ R.
(i) Mostrare che se f non è (strettamente) monotona (né crescente né decrescente), allora
non è iniettiva.
(ii) Dedurre che se f è continua e iniettiva, l’immagine di un intervallo aperto è un intervallo
aperto (e quindi che f è una mappa aperta).
(iii) Dimostrare che se f : X → R è continua e biunivoca, allora è un omeomorfismo sull’immagina f (X) ⊂ R.
(iv) Mostrare anche che non esistono funzioni continue e iniettive f : S 1 → R.
(5.25) Utilizzare l’esercizio (5.24) per mostrare che (utilizzando il fatto che le funzioni (x, y) 8→
x + y e (x, y) 8→ xy sono continue su R2 , e che x 8→ x−1 è continua R ! {0} → R):
(i) Per ogni n ∈ N, n ≥ 1, la funzione f : [0, ∞) → [0, ∞) ⊂ R definita da f (x) = xn è un
omeomorfismo.
(ii) Per ogni n ∈ N, n ≥ 1, per ogni x√
≥ 0, x ∈ R, esiste un unico√y ∈ R tale che xn = y (la
radice n-esima di x, indicata
con n x) e che la funzione x 8→ n x è continua.
√
q
p/q
(iii) La funzione x 8→ x := xp , definita per x ≥ 0, x ∈ R e p, q ∈ Z, q += 0, è una funzione
continua di x.
Nel prossimo esercizio, utilizzare il seguente fatto (provare a dimostrarlo): comunque si
scelgano n numeri positivi x1 , . . . , xn si ha
'
(n
x1 + x2 + · · · + xn
x1 x2 . . . xn ≤
,
n
e l’uguaglianza è verificata solo quando i numeri sono tutti uguali fra loro. Ovvero: la media
geometrica di n numeri positivi è sempre minore o uguale alla loro media aritmetica, e le due
medie sono uguali se e solo se i numeri sono tutti uguali tra loro.
Geometria I
87
*(5.26) Per l’esercizio (5.25), per ogni numero razionale x = p/q e ogni reale b > 0 abbiamo
visto che esiste bx . Dimostrare i seguenti fatti.
(i) Per ogni x, y razionali e ogni b > 0 reale si ha bx+y = bx by e b0 = 1.
(ii) Per ogni numero razionale x = pq dell’intervallo (0, 1) e per ogni numero reale b > 0
diverso da 1 vale la disuguaglianza bx < 1 + (b − 1)x (utilizzare il confronto tra media
geometrica e media aritmetica per n + m numeri, di cui n sono uguali a b e m uguali a
1.)
(iii) Se b > 1, funzione x 8→ bx è una funzione Q → R continua e strettamente monotona
crescente.
(iv) Se b > 1, la funzione x 8→ bx := sup{by : y ∈ Q, y ≤ x}, definita R → R, è ben definita,
monotona e continua, ed estende la funzione x 8→ bx definita Q → R.
(v) Esiste una funzione continua x 8→ logb x, che associa ad x > 0, x ∈ R, l’unico numero
reale y tale che by = x.
(vi) La funzione f : R>0 × R → R definita da f (b, x) = bx è una funzione continua (rispetto alla topologia prodotto del dominio). (suggerimento: si consideri l’omeomorfismo
log2 : (0, ∞) ≈ R)