Breve ed euristica introduzione alla Geometria delle superfici
Abbiamo dimostrato il teorema di classificazione delle 2-varietá compatte (connesse). Rammentiamo che il teorema afferma che ogni 2-varietá compatta (connessa) si puó ridurre ad una e una sola delle seguenti forme standard:
1. Sfera.
2. Somma connessa di n piani proiettivi,
3. Somma connessa di m tori.
Ciascuna di esse é caratterizzata dal numero di Eulero χ e dall’orientabilitá. I
numero di Eulero é dato da χ = V − S + F ove V é il numero di vertici (o classe di
equivalenza di vertici), S é il numero di spigoli (o classe di equivalenza di spigoli),
F il numero di facce, tale numero é un invariante topologico. Se χ(S1 ) e χ(S2 ) sono
i numeri o caratteristica) di Eulero di S1 e di S2 é facile dimostrare che il numero
di Eulero della somma connessa é data da χ(S1 #S2 ) = χ(S1 ) + χ(S2 ) − 2.
In nessuna dimensione superiore a due, si ha lo stesso tipo di teorema per semplicitá e completezza. In dimensione tre il problema é molto piú complicato. Recentemente M. Perelman ha dimostrato un teorema di classificazione per le 3-varietá
ma in un contesto molto generale su cui non possiamo soffermarci. Per ragioni di
complessitá questo ambito esula da questo programma.
Ritornando alla classificazione precedente, alle tre forme standard sono associate
tre classiche geometrie: che sono la Euclidea e la geometria sferica (o ellittica) e la
geometria iperbolica (le non euclidee) .
Consideriamo ora il numero di Eulero si una 2-varietá M ridotta a forma standard, se χ(M ) > 0 allora M ha geometria ellittica o sferica se χ(M ) = 0 la superficie
M ha geometria euclidea se χ(M ) < 0 la superficie M ha geometria iperbolica.
Se M é la sfera S 2 χ(S 2 ) = 2, se M é il piano proiettivo allora la caratteristica
o numero di Elero sará χ(M ) = 1. Il caso χ(M ) = 0 la superficie M puó essere un
toro che denoteremo con T oppure una bottiglia di Klein che denoteremo con K.
Tutti gli altri hanno numero ( o caratteristica ) di Eulero χ < 0. La caratteristica
di Eulero per il toro a n buchi #nT o n-toro é
χ(#nT ) = 2 − 2n,
per n = 1 é il toro ordinario di caratteristica zero. Per n > 1 l’n-toro ha caratteristica negativa e geometria iperbolica.
Per la somma connessa di k piani proiettivi #kP la caratteristica é
χ(#kP ) = 2 − k.
Per un piano proiettivo il numero di Eulero é χ(P ) = 1 maggiore di zero come
per la geometria sferica (o ellittica), per k = 2 (la bottiglia di Klein equivalente
topologicamente alla somma connessa di due piani proiettivi) é χ(P #P ) = 0 ha
geometria euclidea. Per k > 2 l’k-piano proiettivo ha caratteristica negativa e
geometria iperbolica .
Il nostro ambiente topologico/algebrico non é quello proprio per approfodire
questo ambito (che spetta a quello puramente geometrico) ma ne diamo solo un
1
2
schema semplice di ciascuna di esse. Concentriamoci sulle simmetrie di queste
geometrie e non sulle proprietá metriche di esse. Nella geometria euclidea consideriamo le riflessioni rispetto a una linea retta ℓ, a partire da esse le traslazioni sono
due successive riflessioni rispetto a due rette parallele e distinte mentre le rotazioni
attorno a un punto, sono due riflessioni rispetto a due rette che si incontano in quel
punto. Traslazioni e rotazioni danno luogo a tutte le trasformazioni fondamentali
della geometria euclidea piana.
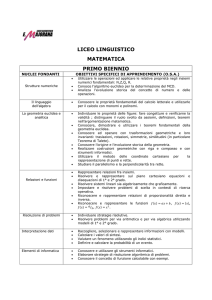
Vediamo ora perché il toro e la bottiglia di Klein hanno struttura euclidea. Dal
grafico di figura di sotto, le due traslazioni Ta e Tb (di ampiezza a e b) danno
luogo a orbite (una in particolare segnata col punto nero) di dominio fondamentale
segnato dalle frecce. Sul dominio fondamentale le frecce individuano il modo di
identificare i lati a coppie e il quoziente fornisce uno spazio omeomorfo a un toro
ovvero (lo spazio dell orbite) T = R2 / < Ta , Tb >. É allora chiaro che essendo la
geometria del dominio fondamentale quella euclidea ristretta al rettangolo, il toro
ne eredita le proprietá. La geometria é anche omogenea, questo significa che ogni
punto (localmente) la geometria é la stessa.
Considerazioni analoghe si possono fare nel caso di una bottiglia Klein, occorrerá
solo cambiare gli orientamenti delle frecce del dominio fondamentale, che é ancora
un rettangolo, in particolare la traslazione Tb sará una traslazione insieme a una
riflessione rispetto all’asse x che denotiamo globalmente (traslazione + riflessione)
con σ. La bottiglia di Klein sará l’orbita del gruppo R2 / < Ta , σ > con geometria
euclidea
Tb
Ta
Passiamo alla geometria sferica/ellittica considerando solo le riflessioni. Le rette
sferiche solo i cerchi massimi. Per le riflessioni di un punto rispetto a una retta
sferica, si consideri un piano per P avente come asse la retta per l’origine (posto nel
centro della sfera) e ortogonale al piano che individua il cerchio massimo passante
per il punto P. Sull’arco per P si prenda il simmetrico e analogamente si costruisca
il simmetrico P1 . La composizione di due riflessioni danno luogo una rotazione
3
attorno a un punto (segnato in nero nel caso difigura). Le misure delle distanza tra
coppie di punti restano inalterate (movimenti isometrici) come nel caso euclideo.
Il piano proiettivo é la sfera S 2 / < ±1 > ove punti diametralmente opposti sono
identificati e la sua geometria é ereditata da quella sferica.
Passiamo alle superfici con caratteristica di Eulero negativa, ovvero passiamo
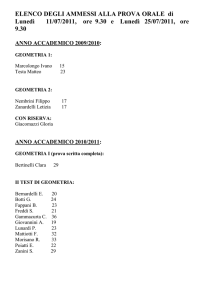
alla geometria iperbolica. Introduciamo la nozione di inversione in un cerchio di
centro fisso o trasformazione per raggi vettori reciproci. Consideriamo un punto P
(vedi figura) esterno alla circonferenza, e tracciamo la circonferenza di centro P e
raggio PO. Questa interseca il circolo di inversione nei punti R ed S. Con centro
nel punto R si traccia la circonferenza passante per O e la si interseca con la retta
OP. Oltre al punto O, si ottiene il punto P che l’ inverso circolare del punto P.
Si hanno i seguenti teoremi:
Teorema A(immagine di una retta tramite una inversione circolare) Tramite
l’inversione circolare rispetto ad una circonferenza di centro O:
a) una retta che non passa per O si trasforma in una circonferenza passante
per O (privata del punto O);
b) una retta per O, ma privata di tale punto, si trasforma in se stessa.
Inversione circolare di una retta non passante per O.
Nello stesso modo si puó arrivare ad enunciare e poi a dimostrare il seguente
teorema:
Teorema B (immagine di una circonferenza tramite un’inversione circolare) Tramite
l’inversione circolare rispetto ad una circonferenza di centro O:
c) una circonferenza che non passa per O si trasforma in una circonferenza
che non passa per O;
d) una circonferenza per O, ma privata di tale punto, si trasforma in una retta
che non passa per O.
4
Effetto dell’inversione circolare sugli angoli: La seguente proposizione descrive
l’effetto dell’inversione circolare sugli angoli.
Proposizione. L’inversione circolare conserva gli angoli tra curve, ma scambia
il loro orientamento. Quindi l’inversione circolare é una trasformazione conforme
(cioé mantiene gli angoli).
Fissato il cerchio unitá (sul piano complesso C), il piano iperbolico denotato con
H, l’inversione lascia fissi i punti di Cu e manda iniettivamente punti interni di Cu
in punti interni di Cu
Nel modello di Beltrami-Poincaré H, i punti della geometria iperbolica sono i
punti interni a Cu e le rette sono i cerchi che incontrano il cerchio unitá sotto angoli
retti e le riflessioni sono le inversioni fatte rispetto a cerchi (rette iperboliche) che
incontrano Cu sotto angoli retti. Cerchiamo cosa sia una riflessione di un punto A
rispetto a una ”retta”.
Si consideri il punto A sulla ”retta” Cb e sia Ca la ”retta” per B ortogonale in
B a Cb . Il punto C (la riflessione del punto A rispetto alla ”retta Ca ) si ottiene
mediante inversione del punto A rispetto alla ”retta” Ca (vedere figura, nella stessa
figura é disegnato un triangolo iperbolico, ciascuno dei lati é un arco di circonferenza
che incontra il bordo di Cu secondo un angolo retto). Continuando a cercare su Cb
punti simmetrici rispetto alla ”retta” Ca otteniamo una successione di punti che
5
si avvicinano alla frontiera di Cu con distanze relative molto piccole dal punto di
vista euclideo ma con la stessa distranza dal punto di vista iperbolico.
Una rappresentazione analitica delle riflessioni in Cu ⊂ C é la seguente: fissiamo
un punto w ∈ Cu = H, la trasformazione cercata é
ϕ(z) =
z−w h
e
1 − w̄z
(caso particolare della trasformazione lineare fratta, o trasformazione di Moebius
f (z) = az+b
cz+d multiplicata per una rotazione). Le riflessioni di una ”retta” n rispetto
a un’altra ”retta” m formanti un angolo dato, si ottiene mediante inversione di n
rispetto a m per ottenere n′
Scegliendo un angolo opportuno (una frazione di angolo giro) 1/8 ad esempio
abbiamo 8 angoli uguali con vertice comune.
Vedremo che vi sono molte piú simmetrie nella geometria iperbolica che non in
quella euclidea o sferica. Avremo di conseguenza nella geometria iperbolica molte
piú tassellature o pavimentazioni di quante non ve ne siano in quella eucliea o
sferica.
In geometria piana o no, si dicono tassellature (talvolta tassellazioni o pavimentazioni) i modi di ricoprire il piano euclideo o no con una o piú figure geometriche
6
ripetute all’infinito senza sovrapposizioni. Tali figure geometriche, (dette appunto
”tasselli”), sono spesso poligoni, regolari o no, ma possono anche avere lati curvilinei, o non avere alcun vertice. L’unica condizione che solitamente si pone é che
siano connessi, anzi semplicemente connessi (ovvero che siano un pezzo unico e
non abbiano buchi). Nella geometria sferica le pavimentazioni sono fornite dai 5
solidi platonici (tetraedro, cubo, ottaedro, pentaedro, icosaedro). Nella geometria
euclidea i tasselli sono rettangoli, triangoli equilateri ed esagoni. Nella geometria
del piano iperbolico abbiamo molti tasselli, praticamente infiniti. Una tassellazione
del piano iperbolico si ottiene considerando la somma connessa di due tori
Operiamo un taglio lungo le curve disegnate in figura, otteniamo due paia di
pantaloni
tagliano ancora lungo opportune curve, otteniamo i quattro esagoni
7
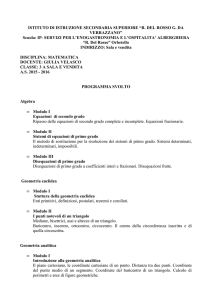
I quattro vertici di questi quattro esagoni si incontrano in un punto. Ma dalla figura
di sotto, il piano euclideo si puó ricoprire con esagoni di cui solo tre si incontrano
in un punto. Essi ricoprono il piano iperbolico mediante simmetrie rispetto ai lati
e senza creare vuoti. Mentre per un angolo pari a 14 rad (pari a un angolo retto)
occorre necessariamente passare al piano iperbolico. Nella stessa figura appare un
inizio di pavimentazione con esagoni iperbolici in cui (nella parte inferiore) sono
mostrati le riflessioni (inversioni) rispetto ai lati in cui in un vertice concorrono
quattro esagoni iperbolici congruenti e adiacenti.
Un tale punto puó esistere solo nel piano con geometria iperbolica ma non in
geometria euclidea piana. Ogni angolo dell’esagono regolare misura 120◦ = 13 rad
per cui possiamo avere la concorrenza in uno stesso punto di soli 3 angoli (3 ×
120◦ = 360◦ ) e la pavimentazione con esagoni regolari é possibile, dove in un
vertice concorrono solo tre esagoni, ovvero nel piano euclideo. Nel piano iperbolico
disponiamo di poligoni regolari iperbolici che a partire da un angolo comune pari
a quello euclideo (per esagoni che stanno in intorno molto piccolo del centro del
cerchio) si va verso esagoni con angolo comune che tende verso zero. Abbiamo allora
infinite pavimentazioni e infinite simmetrie. Nella figura che segue sono disegnati
ottagoni iperbolici regolari con angolo comune decrescente e zero a limite. Tra
questi possiamo trovare uno di angolo pari a 18 e pavimentazioni ove in un solo
vertice insistono otto poligoni iperbolici conguenti e adiacenti.
8
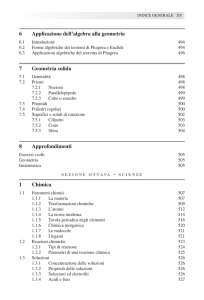
La forma standard della somma connessa di due tori T #T é
aba−1 b−1 cdc−1 d−1
astrattamente rappresentanto da un ottagono regolare con i lati opportunamente
orientati. Abbiamo provato nel corso della dimostrazione del teorema di classificazione delle superfici compatte e connesse, che tutti i vertici dell’ottagono regolare
sono tra loro identificati. Per cui gli otto vertici sono identificati in un punto. Tra
tutti gli ottagoni regolari iperbolici scegliamo allora quello il cui angolo comune
misura 18 rad. (vedi figura ). Vediamo ora come algebricamente si scrivono le
simmetrie necessarie a generare la pavimentazione iperbolica con tasselli iperbolici
ottagoni regolari. Nel caso euclideo le riflessioni dell’ottaedro sono quelle attorno
ai segmenti OA e OG ovvero una rotazione attorno O poi una riflessione attorno a
segmento AA, si ottiene un’altro ottagono con il lato AA in comune. Ma queste riflessioni, per quanto giá detto, non generano una pavimentazione del piano euclideo.
Operiamo le riflessioni indicate con r1 , r2 , r3 del triangolo di base, otteniamo una
rotazione attorno ad O per r1 , r2 e una riflessione rispetto al lato HK nella base
del triangolo iperbolico OHK. Il punto in nero in alto nella figura si trasforma
nel punto in nero in basso mediante la trasformazione Ta = r3 r1 (r1 r2 )2 si devono
aggiungere in modo simile le trasformazioni Tb , Tc , Td . Sotto l’azione delle trasformazioni Tb , Tc , Td si ottengono gli ottagoni iperbolici congruenti che si appoggiano
sui lati b, c, d. Occorre osservare che la pavimentazione dell’intero piano iperbolico
é il risultato dell’applicazione di infinite trasformazioni Ta , Tb , Tc , Td ai successivi
domini. Dal punto di vista euclideo i loro diametri tendono verso zero mano a mano
che, sotto l’azione delle trasformazioni, essi si accostano alla frontiera (senza mai
raggiungerla) ma restano tra loro congruenti in senso iperbolico.
9
Il toro doppio é lo spazio generato dalle orbite del gruppo H/ < Ta , Tb , Tc , Td > .
Consideriamo infine la superficie data dalla somma connessa di tre piani proiettivi P #P #P la cui forma standard é data dalla parola aabbcc, ovvero da un
esagolo con i sei vertici identificati. Il valore comune di questo angolo é dunque
1
6 . La pavimentazione é sul piano iperbolico. Restringiamo opportunamente un
esangono iperbolico fino a ottenere un angolo (in radianti) di 61 (figura in basso)
10
Operando in modo simile al caso ottagonale avremo una pavimentazione. In un
angolo si avranno sei esagoni iperbolici regolari adiacenti e congruenti (figura), le
trasformazioni dovranno agire in modo che gli orientamenti sui lati siano rispettate.
Maurits Cornelis Escher (Leeuwarden, 17 giugno 1898 Laren, 27 marzo 1972)
stato un incisore e grafico olandese. É conosciuto principalmente per le sue incisioni
su legno, tassellature del piano iperbolico e non e dello spazio, litografie e mezzetinte
che tendono a presentare costruzioni impossibili, esplorazioni dell’infinito e motivi
a geometrie interconnesse che cambiano gradualmente in forme via via differenti.
Le opere di Escher sono molto amate dagli scienziati, logici, matematici e fisici che
apprezzano il suo uso razionale di poliedri, distorsioni geometriche ed interpretazioni
originali di concetti appartenenti alla scienza, spesso per ottenere effetti paradossali.
(internet mostra varie opere di questo autore, se ne consiglia la visione).
Il Prof.