ROME REHABILITATION 2012
Hotel Ergife
25-26-27 giugno 2012
I disturbi della
coordinazione
dal sintomo alla terapia
Sandro Gentili
IL MOVIMENTO COORDINATO
RUOLO DEL CERVELLETTO
RUOLO DEI NUCLEI DELLA BASE
Controllo Extrapiramidale
VIE E RIFLESSI SPINALI
L’Apprendimento Motorio
• Ci basiamo su due sistemi di apprendimento
per eseguire schemi di movimento:
• Apprendimento esplicito facciamo uno sforzo
cosciente per "addestrare" il cervello e siamo
consapevoli di ciò che stiamo imparando;
• Apprendimento
implicito
non
avviene
intenzionalmente, si imparano cose senza
pensarci, (per esempio attraverso la ripetizione
semplice).
• In pratica, la distinzione tra queste due forme
di apprendimento è difficile perchè, "la maggior
parte
dell'apprendimento
può
essere
influenzato sia dalla conoscenza implicita sia da
quella esplicita a livelli ancora al vaglio di studi
".
DISTURBO DELLA COORDINAZIONE
E RIAPPRENDIMENTO MOTORIO
•
•
•
•
•
•
•
•
•
•
Alterazione Posturale
Deficit della deambulazione
Disturbo dell’equilibrio
Alterazione del tono
muscolare
Atassia
Disfagia
Disartria
Disturbi sfinterici
Movimenti involontari
Micrografia
• Rieducazione Posturale
• Esercizio
propriocettivo
• Cues sensoriali
• Biofeedback
• Mirror Therapy
• Robotica
• Esercizio in acqua
• Training deambulatorio
• Assistive Tecnology
SCOPO DELL’ESERCIZIO TERAPEUTICO
L’esercizio terapeutico ha
lo scopo di mutare
un’attività motoria alterata
e stereotipata in un
movimento adeguato e
competente, dando la
possibilità all’esercizio
stesso di assumere il valore
di esperienza
attraverso una dialettica
percettivo-motoria
Foundamental of sensory phisiology
Schmidt R.F. (1981)
….MA COSA STIAMO STUDIANDO ?
• Quali risorse tecnologiche
abbiamo per migliorare
una funzione lesa?
• Quanto può riapprendere
il nostro cervello (ad
esempio dopo un danno
piramidale), se viene
stimolato adeguatamente
con una dialettica sensori
motoria?
ROBOTICA
IMPIEGO DEI ROBOT
• La terapia robotica sfrutta
un paradigma di
apprendimento di tipo
esplicito.
• Essa si basa, infatti, su
istruzioni esplicite che
portano il paziente alla presa
di coscienza del compito
motorio che deve eseguire.
• Il trattamento prevede
diverse modalita di esercizio,
inducendo movimenti passivi,
attivi o attivi assistiti, da
applicare nelle diverse fasi
della riabilitazione secondo le
abilita motorie del paziente.
SISTEMA ROBOTICO LOKOMAT
SISTEMA ROBOTICO MIT-MANUS
• Il primo sistema robotico testato clinicamente su larga scala
• Sono stati condotti studi clinici in soggetti con ictus cerebrale in fase
acuta (22) e cronica (23) che hanno dimostrato un recupero maggiore a livello
della spalla e del gomito nel gruppo trattato con la MIT-MANUS con 4-5
sessioni a settimana di un'ora ciascuna per nove settimane.
APPRENDIMENTO PER IMITAZIONE
•
•
•
•
All’inizio degli anni ’90 Giacomo Rizzolatti e composto
da Vittorio Gallese, Leonardo Fogassi e Luciano Fadiga,
scoprì nel macaco Nemestrino, tramite microelettrodi,
una speciale classe di neuroni, a livello dell’area F5
nella corteccia premotoria, che si attivavano sia
durante l’esecuzione di un compito (o un’azione), sia
alla vista del compito stesso eseguito da un altro
soggetto.
Per la loro particolarità di riflettere le azioni viste
come se ci si specchiasse venne dato loro il nome di
“neuroni specchio”.
Questa scoperta fu significativa anche perché
costituì un altro importante tassello che poneva fine
allo schema rigido e fisso che metteva in netta
distinzione percezione, cognizione e azione, andando a
conferire al sistema motorio le sue reali potenzialità.
Apprendimento motorio per imitazione, comprensione
delle azioni e loro previsione, empatia, sono i tre
campi in qui i neuroni specchio sono implicati e
attraverso questi meccanismi vengono impiegati in
ambito riabilitativo.
RIPROGRAMMAZIONE IDEOMOTORIA
• Wolfgang Prinz e coll (2002, 1990, 1987) richiamano alla nozione di
"azione ideomotoria“: più un atto percepito assomiglia ad uno presente
nel patrimonio motorio dell'osservatore, più tende a indurne l'esecuzione
• Percezione ed esecuzione delle azioni debbono pertanto possedere uno
"schema rappresentazionale comune “ (Prinz 2002), dove questo
schema è modulato dalla comprensione da parte dell'osservatore del tipo
d'atto, ovvero allo scopo o stadio finale dei movimenti compiuti dal
dimostratore (Bekkering et al 2000).
• L'esecuzione stessa, in tutto il suo decorso, è una prolungata fonte di
reafferenza, un banco di prova sul piano empirico del prototipo di azione.
Attraverso questa dialettica si sarà poi in grado di comprendere e gestire
(sul piano cognitivo) cosa non andava e perché.
Quindi l’agire permette l’apprendimento,
l’apprendimento permette di agire con maggior efficacia e pertinenza.
MIRROR THERAPY
•
•
•
•
Il primo utilizzo pratico della scoperta in
riabilitazione la si deve a Ramachandran et al.,
che nel 1995 va ad indagare l’effetto dell’uso
dello specchio per la riabilitazione del dolore da
arto fantasma.
Il disturbo della rappresentazione del sé a livello
corticale ha trovato una forma di compensazione,
permettendo una riprogrammazione funzionale
dello schema corporeo che ha avuto l’effetto
pratico di far diminuire il dolore in modo
statisticamente significativo
La Mirror Therapy è risultata efficace nei
seguenti casi: dolore da arto fantasma, sindrome
dolorosa regionale complessa (si vedano gli studi
in materia di Moseley et al.), riabilitazione
motoria dell’arto superiore in ictus cronico
(Sutbeyaz et al.).
Si pone quindi come una interessante metodica di
scuola EBR (Evidence Based Rehabilitation), utile
come approccio in sé e come consolidamento dei
risultati ottenuti con altre tecniche.
Mirror Image Movement Enhancer (MIME)
• E’ un manipolatore con sei gradi
di libertà, commercializzato
come Puma 560, che applica
forze all'arto superiore
attraverso un'ortesi di
avambraccio permettendo
movimenti di reaching.
• I soggetti con ictus in fase
stabilizzata trattati con questo
dispositivo raggiungano risultati
piu soddisfacenti in termini di
forza muscolare, fluidità del
movimento e riduzione della
menomazione.
Rispetto alle tecniche di riabilitazione convenzionali, dove è difficile
quantificare la dose, l'intensità e l'esecuzione dell'esercizio somministrato, la
terapia robotica si propone come un valido strumento in grado di studiare i
processi del recupero motorio.
REALTA’ VIRTUALE
•
Può essere considerata come il punto più
elevato di rendere l’interazione con i nuovi
media il più possibile simile a quella che
ciascuno di noi ha all’interno di un
ambiente reale
Motor Learning di tipo implicito
•
In pratica, con la realtà virtuale il corpo
diventa la principale interfaccia con cui
manipolare l’informazione disponibile
(esperienza percettivo motoria)
Possiamo definire la realtà virtuale come
un ambiente tridimensionale generato dal
computer in cui il soggetto o i soggetti
interagiscono tra loro e con l’ambiente
come se fossero realmente al suo interno
•
Dal punto di vista tecnologico è possibile
distinguere tra due tipi di realtà virtuale:
quella immersiva e quella non immersiva
ESERCIZIO TERAPEUTICO E
RIPROGRAMMAZIONE MOTORIA ESPLICITO/IMPLICITA
• E.T.C. (esercizio terapeutico conoscitivo)
COSCIENTIZZAZIONE
•
•
•
•
•
Biofeedback
Biofeedback
Biofeedback
Biofeedback
Biofeedback
posizionale
EMG
stabilometrico
basografico
goniometrico
SISTEMI BIOFEEDBACK
• Rappresentano un modello di
esercizio conoscitivo valido per
la riprogrammazione motoria;
• Sono utili per migliorare il
reclutamento delle unità
motorie;
• Permettono di eseguire Test di
Misurazione;
• L’esercizio è ripetibile in
intensità e durata;
• La riproducibilità della tecnica
consente di addestrare il
paziente che guiderà l’esercizio
in modo autonomo. (modello)
SISTEMI STABILOMETRICI E
RIPROGRAMMAZIONE PROPRIOCETTIVA
TEST ED ESERCIZIO
PROPRIOCETTIVO
SENSIBILITA’ PROPRIOCETTIVA DI POSIZIONE
SENSIBILITA’ DEL CENTRO PERCEPITO
SENSIBILITA’ DEL MOVIMENTO
SENSIBILITA’ DEL MOVIMENTO
MEDIA DELL’ERRORE (ATE)
Lewis M.M., Slagle A.B., Smith A.B., Truong Y., Bai P., et Al.
Task specific influences of Parkinson’s disease on the striato-thalamo-cortical and
cerebello-thalamo-cortical motor circuitries.
Neuroscience 147 (2007) 224-235.
•
•
•
I pazienti detti “Diligenti” tendono ad
avere buoni risultati sia a livello
dell’ATE sia a livello dell’indice di
stabilità, sia sul lato maggiormente
interessato che sul lato
secondariamente colpito.
Il lato primariamente colpito,
solitamente, nel tempo tende a un
lieve peggioramento, talvolta rilevabile
solo strumentalmente. Si può
ipotizzare che questi pazienti tendano
ad utilizzare la via cerebello-talamocorticale e striato-talamo-corticale in
maniera “bilanciata” (anche grazie al
supporto farmacologico) con una
predominanza però della cerebellotalamo-corticale, attivata dalla loro
attenzione durante lo svolgimento
preciso del task motorio.
Questi pazienti tendono ad acquisire
maggiormente l’informazione
propriocettiva soprattutto con il lato
“sano” e ad essere in grado di
rieseguire l’esercizio con precisione al
follow-up.
• I pazienti “Non Diligenti”, sembrano usufruire
del compenso farmacologico per riequilibrare il
lato primariamente malato, dove migliora sia
l’indice di stabilità che la capacità di svolgere il
task al follow-up.
• Dal lato contro laterale, apparentemente meno
interessato dalla patologia, sembrerebbe invece
subentrare
una
instabilità
documentata
dall ’ andamento dell ’ indice di stabilità e una
incapacità a riprendere il compito funzionale al
follow-up.
• Apparentemente questi pazienti usufruirebbero
del compenso farmacologico per quanto riguarda
la parte più colpita che verrebbe riequilibrata,
mentre la parte contro laterale, meno colpita,
risentirebbe di un “sovradosaggio” del farmaco e
un ’ eccessiva facilitazione della via straiatotalamo-corticale, non compensata come nei
“ Diligenti ”
da un attivazione, dovuta
dall’attenzione, della via cerebellare.
Cosa suggerisce questo studio
•
Carpenter M. G, Bloem B. R. – Postural control in Parkinson
patients: a proprioceptive problem? – Experimental Neurology
227 (2011) 26-30.
•
Kerr G, Worringham C.J., Cole M.H., Lacherez P.F., Wood
J.M., Silburn P.A. - Predictors of future falls in Parkinson
disease – Neurology 75, July 13-2010.
•
Tagliabue M., Ferrigno G., Horak F. – Effects of Parkinson’s
disease on proprioceptive control of posture and reaching while
standing – Neuroscience 158 (2009) 1206-1214.
•
Konczac J., Corcos D.M., Horak F., Poizner H., Shapiro M. –
Proprioception and motor control in Parkinson’s disease – J.
Motor Behavior, vol 41, n°°6, 2009.
•
Mongeon D., Blanchet P., Messier J. - Impact of Parkinson’s
disease and dopaminergic medication on proprioceptive
processing. Neuroscience 158 (2009) 426-440.
BIOFEEDBACK EMG VISIVO E
RIPROGRAMMAZIONE MOTORIA
Con questo strumento è possibile rilevare
l’intensità della contrazione muscolare
mediante segnale EMG di superficie
E’ utile per il reclutamento delle unità
motorie residue e per il rinforzo della
risposta motoria.
E’ ortesi conoscitiva nella
riprogrammazione del movimento volontario
Consente la misurazione dell’esercizio
terapeutico e la pianificazione di test di
valutazione iniziale e di follow up
E’ stato impiegato in studi scientifici sulla rieducazione del passo
dell’emiplegico e viene attualmente usato anche nelle malattie
neurodegenerative per lo stesso scopo.
Se applicato sul m. tibiale anteriore e sul m. gemello mediale viene
riprodotto “a secco” il passaggio tacco-punta e si allena in modo specifico
l'alternanza contrazione-rilasciamento degli attivatori di caviglia e si
fornisce un ritmo che, tarato dall'inizio sulle potenzialità del paziente, deve
essere mantenuto per tutta la durata dell'esercizio.
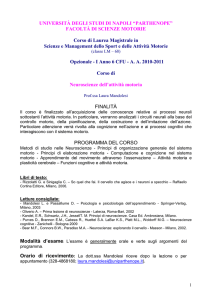
INDAGINE STRUMENTALE
Prima del trattamento
Dopo il trattamento
Analisi baropodometrica dinamica
SEGNALE VISIVO
ASSISTIVE TECHNOLOGY
MISURAZIONE DELLA DISABILITA’
Evidence Based Rehabilitation
UPDRS
Barthel Index
Berg, Tinetti
FFM
Mini Mental Scale
ADL Scale
6 Minutes WT
SF36
Disturbi della coordinazione: CONCLUSIONI
• Il fenomeno dell'apprendimento motorio
(motor learning) è un processo associato
alla pratica e all'esperienza che portano a
modificazioni permanenti nelle abilità di
produrre movimenti finalizzati.
• Le variabili che incidono in maniera
rilevante sulla capacità di apprendimento
sono l'intensa ripetitività, la rilevanza
funzionale del gesto e l'utilizzo di
feedback durante l'esercizio.
• Durante l'esecuzione di un compito motorio
infatti, i processi di apprendimento
vengono consolidati utilizzando diverse
tipologie di feedback (visivo, uditivo,
tattile).
GRAZIE
[email protected]