Geometria I
§ 13
112
Spazi affini
Cfr: Nacinovich, Cap V, §1 [3].
Sappiamo come è definita l’azione di un gruppo G su un insieme e l’azione di un gruppo
topologico su uno spazio topologico. Ricordiamo anche che cosa è uno spazio vettoriale su un
campo K (per esempio, K = R, K = C).
(13.1) Definizione. Uno spazio vettoriale V è un gruppo abeliano (additivo) su cui il campo
degli scalari K “agisce”; l’azione di un campo K su un gruppo abeliano è data in termini di
una legge di composizione (“prodotto per uno scalare”)
(k, v) ∈ K × V #→ kv ∈ V
con le proprietà seguenti.
(i) Per ogni k ∈ K la funzione indotta v ∈ V #→ kv ∈ V è un omomorfismo del gruppo
additivo V (cioè è additiva, manda lo zero nello zero, . . . )
(ii) Per ogni k1 , k2 ∈ K, v ∈ V :
(a) (k1 + k2 )v = k1 v + k2 v,
(b) (k1 k2 )v = k1 (k2 v)
(iii) 1v = v.
(13.2) Esempio. Sia Rn il prodotto diretto di n copie di R. Ha per elementi le n-uple di
numeri reali, ed è un gruppo additivo rispetto alla somma componente-per-componente. Il
prodotto di uno scalare per una n-upla è il modello di prodotto di scalare per vettore più in
generale. Infatti, in molti contesti non si distingue il concetto di vettore (riga o colonna) dal
concetto di n-upla.
L’idea di spazio affine è l’applicazione della omogeneità degli spazi vettoriali (vedi definizione (12.8)) rispetto al gruppo delle traslazioni: a meno di traslazioni, gli intorni dei punti
Rn sono gli stessi.17 Si può dire che uno spazio affine è uno spazio che localmente è come uno
spazio vettoriale, e dati due punti c’è ben definita una unica trasformazione (traslazione) che
manda un punto nell’altro (trasporto parallelo). Vedremo poi come da questa idea si deducono
i concetti di parallelismo e incidenza.
17
La parola affine fu usata per la prima volta da Eulero, ma la geometria affine fu riconosciuta come disciplina
soltanto dopo l’avvio del programma di Erlangen di Felix Klein (1849–1925) – cioè il famoso discorso tenuto nel
1872 da Klein nell’Università di Erlangen, in cui Klein propone una unificazione delle geometrie note al tempo
(euclidea piana e dello spazio, non-euclidea, proiettiva, affine,. . . ) con una interpretazione in termini di gruppi
di simmetria – o meglio gruppi di trasformazioni: gli spazi tradizionali sono “spazi omogenei” rispetto ad una
opportuna scelta del gruppo di trasformazioni (le similitudini e le rototraslazioni per la geometria euclidea, le
trasformazioni lineari per la geometria affine, . . . ) e le proprietà che si studiano sono quelle invarianti rispetto
all’azione di tale gruppo (angoli, lunghezze, . . . ). Questo approccio ha avuto una significativa influenza sul
modo in cui la geometria è stata insegnata e divulgata nei successivi (≥ 50) anni.
Geometria I
113
(13.3) Definizione. Uno spazio affine X su un campo K è un insieme X (insieme di punti)
−
→
su cui agisce in modo fedele e transitivo uno spazio vettoriale X su K (considerato solo come
gruppo additivo – cioè come il gruppo delle traslazioni). Gli elementi di X si chiamano punti,
−
→
gli elementi di X si dicono vettori affini o traslazioni, e il campo K viene detto campo dei
coefficienti.
−
→
(13.4) Sia X uno spazio affine e X lo spazio vettoriale (su campo K) associato. Allora
−
→
−→
esiste (unica) una funzione X × X → X , indicata da (A, B) #→ AB (indicato anche come
−→
AB = B − A), con le seguenti proprità:
−
→
−→
(i) ∀A ∈ X, ∀v ∈ X , ∃ unico B ∈ X : AB = v.
−→ −−→ −→
(ii) ∀A, B, C ∈ X, AB + BC = AC.
−
→
Dimostrazione. L’azione di X su X è per definizione transitiva: dunque per ogni scelta di A
−
→
−
→
−
→
e B in X esiste v ∈ X tale che v + A = B. Ora, se v, w ∈ X sono due vettori di X tali che
v + A = B e w + A = B, allora si ha v + A = w + A, cioè il vettore v − w fissa il punto A
((v − w) + A = A). Ma se v − w fissa il punto A allora, dal momento che (essendo l’azione
−
→
transitiva) ogni punto di X si può scrivere come z + A per qualche z ∈ X , per ogni B ∈ X
si ha
(v − w) + B = (v − w) + (z + A)
= (v − w + z) + A
= (z + (v − w)) + A
= z + (v − w + A)
=z+A
=B
e dunque v − w fissa ogni punto di X. Ma l’azione è fedele, e quindi deve essere v = w (cioè
−
→
per ogni A, B in X esiste unico v ∈ X per cui B = v + A. Si può dunque indicare con
−→
AB = v.
−→ −−→ −→
Ora mostriamo che ∀A, B, C ∈ X, AB + BC = AC. Infatti, per definizione risulta
−→
AB + A = B
−−→
BC + B = C
e quindi
−−→
−−→ −→
C = BC + B = (BC + AB) + A
che per definizione (e commutatività) si legge come
−→ −→ −−→
AC = AB + BC.
qed
Geometria I
114
−
→
(13.5) Supponiamo di avere un insieme non vuoto X e uno spazio vettoriale X , insieme con
−
→
−→
una funzione X × X → X , indicata da (A, B) #→ AB che soddisfa i due assiomi:
−
→
−→
(i) ∀A ∈ X, ∀v ∈ X , ∃ unico B ∈ X : AB = v.
−→ −−→ −→
(ii) ∀A, B, C ∈ X, AB + BC = AC (assioma di Chasles.18 )
Allora X è spazio affine rispetto all’azione
−
→
(v, A) ∈ X × X #→ A + v,
−→
dove si definisce A + v l’unico punto B ∈ X tale che AB = v (primo assioma).
Dimostrazione. Vedi esercizio (7.1).
qed
−
→
(13.6) Esempio. X = X = Rn . Allora lo spazio affine si indica con An (R). Analogamente,
per K = C, lo spazio affine n-dimensionale si indica con An (C).
(13.7) Definizione. Una retta nello spazio affine X è un sottoinsieme di X che si può scrivere
come
r = {x0 + tv : t ∈ K}
−
→
per un certo x0 ∈ X e v ∈ X ! {0}.19 Si dice che la retta passa per un punto se il punto
−
→
appartiene alla retta. Lo spazio vettoriale )v* ⊂ X di dimensione uno generato da v è la
giacitura della retta.
(13.8) Definizione. Tre punti A, B, C di uno spazio affine X sono allineati se stanno su una
stessa retta.
(13.9) Tre punti distinti A, B, C di uno spazio affine X sono allineati se e soltanto se i vettori
−→ −→
−−→ −→
AB e AC sono linearmente dipendenti (equivalentemente, se BC e BA sono linearmente
−→ −−→
dipendenti, oppure se CA e CB sono linearmente dipendenti).
Dimostrazione. Esercizio (7.2).
qed
(13.10) Due rette r = {A + tv : t ∈ K} e s = {B + tw : t ∈ K} coincidono se e solo se i
vettori v e w sono linearmente dipendenti (cioè se le giaciture coincidono) e A ∈ s ∧ B ∈ r.
Dimostrazione. Supponiamo che r = s. Allora è ovvio che A ∈ s ∧ B ∈ r. Ora, dato che
A ∈ s, esiste tA ∈ K tale che A = B +tA w; analogamente, esiste tB ∈ K tale che B = A+tB v.
Segue che
B − A = −tA w = tB v,
18
Michel Chasles, matematico francese (1793–1880).
In altre parole, una retta è l’orbita del punto x0 ∈ X mediante l’azione di un sottogruppo 1-dimensionale
−
→
(∼
= K) dello spazio di traslazioni X
19
Geometria I
115
cioè tA w + tB v = 0. Se tA .= 0 oppure tB .= 0, allora abbiamo dimostrato che v e w sono
linearmente dipendenti. Altrimenti, tA = 0 = tB cioè A = B. Ma allora, dato che A+v ∈ r = s
, esiste t! ∈ K tale che A + v = A + t! w, e quindi v − t! w = 0 (ancora, v e w sono linearmente
dipendenti).
Viceversa, supponiamo che A ∈ s e B ∈ R e che v e w siano linearmente dipendenti.
Segue che A = B + tA w per un certo tA ∈ K e che esiste t! ∈ K, t! .= 0, tale che v = t! w;
quindi
r = {A + tv : t ∈ K}
= {B + tA w + tv : t ∈ K}
= {B + tA w + tt! w : t ∈ K}
= {B + (tA + tt! )w : t ∈ K}
= {B + tw : t ∈ K}
=s
qed
(13.11) Teorema. Consideriamo il piano affine. Se A ∈ A2 (K) è un punto e r una retta
che non passa per A, allora esiste unica la retta per A che non interseca r (la parallela a r
passante per A). Tale retta ha la stessa giacitura di r. Due rette sono quindi parallele se
hanno la stessa giacitura.
Dimostrazione. Per definizione esistono un punto x0 e un vettore v .= 0 per cui
r = {x0 + tv : t ∈ K},
e non esiste t ∈ K per cui x0 + tv = A (dato che r non passa per A). La retta
r! = {A + tv : t ∈ K}
passa certamente per A. Supponiamo che r ∩ r! .= ∅. Allora esistono t1 , t2 ∈ K tali che
A + t1 v = x0 + t2 v ∈ r ∩ r! ,
e quindi
A = x0 + (t2 − t1 )v =⇒ A ∈ r
che è assurdo. Abbiamo mostrato che esiste una retta che non interseca r.
Supponiamo di avere due rette s e s! tali che s ∩ r = ∅ e s! ∩ r = ∅ e passanti per A.
Allora si possono scrivere con le equazioni s = {A + tw} e s! = {A + tw! }. Per la proposizione
(13.10) le due rette coincidono se e solo se w e w! sono linearmente dipendenti. Analogamente
a quanto visto sopra, s ∩ r = ∅ se e solo se non esistono t1 e t2 ∈ K tali che A + t1 w = x0 + t2 v,
cioè se e solo se l’equazione vettoriale (nelle incognite t1 e t2 )
t1 w − t2 v = x0 − A
Geometria I
116
non ha soluzioni, il che avviene se e solo se il vettore x0 − A non appartiene al sottospazio di
K 2 generato da w e v. Ora, se v e w sono linearmente indipendenti allora tale sottospazio
coincide con K 2 , per cui la soluzione c’è. Affinché la soluzione non esista è necessario che v e
w siano dipendenti. Abbiamo quindi mostrato che w è necessariamente multiplo di v. Dato
che lo stesso vale per w! , risulta che w e w! sono linearmente dipendenti e quindi s = s! . qed
(13.12) Nota. Osserviamo che valgono le seguenti proprietà: Se X è un piano affine, allora
(i) Per ogni due punti distinti passa una unica retta.
(ii) Per ogni retta r e punto A .∈ r, esiste una unica retta per A che non interseca r (detta
parallela).
(iii) Esistono almeno 4 punti che non contengono terne di punti allineate.
(Osserviamo che le prime due proprietà (ma non la terza) valgono anche per una retta
affine.)
(13.13) Esempio. Sia F un campo finito di ordine pk (prossimo anno, algebra?). Primo p.
Allora, A2 (F) è un piano affine sul campo F. Per p = 2, k = 1, F2 , A2 (F2 ) quanti punti ha?
Quante rette? Che legame ha con un tetraedro? Per p = 3, k = 1, con F3 = Z3 (si veda
l’esercizio (7.22))? In generale, se F è un campo finito di ordine n, allora A2 (F) ha n2 punti,
una retta affine ha n punti, e per un punto passano n + 1 rette (perché? considerare il fascio
di rette per un punto e le intersezioni delle rette del fascio con una retta che non passa per il
centro del fascio). Per ognuna delle n2 (n2 − 1) coppie (ordinate) di punti distinti di A2 (F) c’è
una sola retta, e in una retta ci sono n(n − 1) coppie (ordinate) di punti distinti. Quindi in
totale le rette sono
n2 (n2 − 1)
= n2 + n.
n(n − 1)
(13.14) Nota. Segue che esiste una relazione di equivalenza tra rette (relazione di parallelismo: r 2 s ⇐⇒ r = s ∨ r ∩ s = ∅). In particolare, un piano affine ha una struttura di
incidenza, nel senso che si ha un insieme P di punti, un insieme R di rette, e una relazione di
appartenenza ∈ : P × R → {0, 1}.
−→ −→
È possibile definire il rapporto (ratio) AC : AB di tre punti allineati in uno spazio affine
A, B, C come quell’unico ρ tale che
−→
−→
AC = ρAB.
(13.15) Il rapporto di tre punti allineati in uno spazio affine su campo K esiste ed è unico in
K.
Dimostrazione. Esercizio (7.14).
qed
Geometria I
117
(13.16) Teorema (Talete (∼624–546)). Siano li , i = 1, 2, 3 tre rette parallele distinte di un
piano affine X, e r1 , r2 altre due rette non parallele a li , con intersezioni Pi,j = ri ∩ lj . Allora
−−−−→ −−−−→ −−−−→ −−−−→
P1,1 P1,3 : P1,1 P1,2 = P2,1 P2,3 : P2,1 P2,2 .
Viceversa, se B è un punto di r1 tale che
−−−→ −−−−→ −−−−→ −−−−→
P1,1 B : P1,1 P1,2 = P2,1 P2,3 : P2,1 P2,2 ,
allora B = P1,3 .
−−−→
Dimostrazione. Per semplicità chiamiamo Ai = P1,i e Bi = P2,i per i = 1, 2, 3, e a = A1 A3 :
−−−→
−−−→ −−−→
A1 A2 , b = B1 B3 : B1 B2 . Per prima cosa dobbiamo mostrare che a = b. I tre vettori Bi − Ai ,
per i = 1, 2, 3, sono tutti multipli di un vettore non nullo v (dato che le tre rette li sono
parallele), cioè
Bi = Ai + βi v
per certi βi ∈ K, i = 1, 2, 3. Le rette ri d’altra parte non sono parallele a v. Per definizione
si ha
!
A3 = A1 + a(A2 − A1 )
B3 = B1 + b(B2 − B1 )
Ma
e quindi
=⇒ B3 − A3 = (B1 − A1 ) + b(B2 − B1 ) − a(A2 − A1 ).
=⇒ a(A2 − A1 ) − b(B2 − B1 ) ∈ )v*.
B2 − B1 = (A2 + β2 v) − (A1 + β1 v)
= A2 − A1 + (β2 − β1 )v
)v* 5 a(A2 − A1 ) − b[A2 − A1 + (β2 − β1 )v]
=⇒ a(A2 − A1 ) − b(A2 − A1 ) ∈ )v*,
cioè (a − b)(A2 − A1 ) ∈ )v*. Ma r1 non è parallela a v, quindi deve necessariamente essere
a − b = 0, cioè la tesi. Viceversa: poniamo B3 = B (senza supporre B3 ∈ l3 ), e siano a, b, v,
con a = b, e β1 , β2 come sopra. Non è difficile mostrare che
B3 ∈ l3 ⇐⇒ B3 − A3 ∈ )v*.
Se ripercorriamo le uguaglianze al contrario possiamo dedurre che
B3 − A3 = (B1 − A1 ) + b(B2 − B1 ) − b(A2 − A1 ).
= B1 − A1 + b(B2 − A2 ) − b(B1 − A1 )
= A1 + β1 v − A1 + b(β2 − β1 )v ∈ )v*
Per esercizio provare a completare i dettagli della dimostrazione (o a trovarne un’altra):
esercizio (7.15) a pagina 129.
qed
Geometria I
§ 14
118
Sottospazi affini
Cfr: Nacinovich, Cap I, §2 [3].
−
→
(14.1) Definizione. Sia X uno spazio affine e X lo spazio vettoriale su campo K associato.
−
→
Se P ∈ X è un punto fissato di X e W ⊂ X è un sottospazio vettoriale, allora il sottospazio
S = {x ∈ X : x − P ∈ W }
di tutti i punti x per cui x − P ∈ W si dice sottospazio affine passante per P e parallelo a W .
Il sottospazio W si dice giacitura di S. La dimensione di S è per definizione la dimensione di
W.
(14.2) Nota. I sottospazi affini sono le orbite mediante l’azione del sottospazio W , che agisce
mediante traslazioni sullo spazio affine. Osserviamo anche che, seguendo la definizione (14.1),
le rette sono proprio i sottospazi affini di dimensione 1. Inoltre non è difficile vedere che i punti
sono i sottospazi affini di dimensione 0. I sottospazi di dimensione dim(X) − 1 (codimensione
1 in X) si dicono iperpiani. I sottospazi di dimensione 2 si dicono piani. Se n = 3, piani e
iperpiani coincidono.
−
→
(14.3) Proposizione. Se S ⊂ X è un sottospazio affine con giacitura W ⊂ X , allora è uno
−
→
−
→
spazio affine con spazio vettoriale associato S = W ⊂ X
−
→
Dimostrazione. Il gruppo additivo X agisce in modo fedele e transitivo su X per definizione,
−
→
e dunque W ⊂ X agisce in modo fedele e transitivo sulla sua orbita, che per definizione è
S!
qed
−
→
(14.4) Proposizione. Siano P1 , P2 ∈ X due punti di uno spazio affine X, W1 , W2 ⊂ X due
sottospazi vettoriali e S1 = P1 + W1 , S2 = P2 + W2 i due sottospazi affini passanti per Pi con
giacitura Wi (i = 1, 2). Allora S1 = S2 se e solo se W1 = W2 , P2 ∈ S1 e P1 ∈ S2 . Cioè, un
sottospazio affine è identificato da uno qualsiasi dei suoi punti e dalla giacitura.
Dimostrazione. Supponiamo che S1 = S2 . Allora è ovvio che P1 ∈ S2 e P2 ∈ S1 . Vogliamo
dimostrare che W1 = W2 . Osserviamo che per definizione W1 = S1 − P1 e W2 = S2 − P2 . Dato
che P1 ∈ S1 = S2 , per definizione il vettore P1 −P2 appartiene a W2 . Inoltre P2 = P1 +(P2 −P1 )
da cui si trae che
S 2 = P2 + W 2
= P1 + (P2 − P1 ) + W2
= P1 + W 2
dato che w +W2 = W2 (come insiemi!) per ogni w ∈ W2 (vedi esercizio (7.7)), ed in particolare
per P2 − P1 . Ora, questo implica che S1 = S2 se e solo se
P 1 + W 1 = P1 + W 2
Geometria I
119
ma questo accade se e solo se W1 = W2 .
Viceversa, se P1 ∈ S2 e P2 ∈ S1 e W1 = W2 , allora come sopra si può scrivere S1 = P1 + W1
e S2 = P2 + W2 , e quindi S1 = S2 .
qed
(14.5) Per due punti distinti di uno spazio affine passa una unica retta. Per tre punti non
allineati di uno spazio affine passa un unico piano.
Osserviamo che la proposizione (14.4) generalizza la proposizione (13.10): basta considerare
i sottospazi 1-dimensionali generati da v e w.
(14.6) Definizione. Consideriamo un insieme di d + 1 punti P0 , P1 , . . . Pd in uno spazio
affine X. Il più piccolo sottospazio affine S ⊂ X che contiene tutti i punti P0 , . . . , Pd si dice
sottospazio affine generato dai d + 1 punti P0 , . . . , Pd .
(14.7) Nota. Dobbiamo dimostrare che la definizione (14.6) è ben posta, dal momento che
potrebbe non esistere un sottospazio con la proprietà cercata. Vediamo come.
(14.8) Proposizione. Il sottospazio affine di X generato da d + 1 punti P0 , . . . , Pd ∈ X è il
sottospazio passante per P0 e con giacitura
−−→ −−→
−−→
−
→
)P0 P1 , P0 P2 , . . . P0 Pd * ⊂ X ,
e non dipende dall’ordine con cui i punti P0 , . . . , Pd sono stati scelti.
Dimostrazione. Sia S il sottospazio affine di X passante per P0 e con giacitura
−−→ −−→
−−→
−
→
W = )P0 P1 , P0 P2 , . . . P0 Pd * ⊂ X .
Si ha ovviamente P0 ∈ S e, inoltre, per ogni i Pi ∈ S dato che per ogni i = 1, . . . d si ha
Pi = P0 + (Pi − P0 ) ∈ P0 + W = S (per definizione Pi − P0 ∈ W ). Quindi S contiene tutti i
punti P0 , . . . , Pd .
Supponiamo che S ! sia un altro sottospazio affine contenente i punti P0 , . . . , Pd . In
−
→
particolare, P0 ∈ S ! , per cui esiste W ! ⊂ X tale che
S ! = P0 + W ! .
Dal momento che per ogni i = 1, . . . , d Pi ∈ S ! , e quindi Pi − P0 ∈ W ! ,
−−→ −−→
−−→
W = )P0 P1 , P0 P2 , . . . P0 Pd * ⊂ W ! .
Cioè S è contenuto in ogni sottospazio affine contenente i d + 1 punti. Sia ora S ! il sottospazio
affine costruito a partire da una permutazione dei d + 1 punti esattamente come S. Allora
l’argomento di sopra si applica sia a S che a S ! , per cui S ⊂ S ! e S ! ⊂ S, cioè S = S ! . qed
Geometria I
120
(14.9) Nota. Consideriamo d + 1 punti P0 , P1 , . . . , Pd nello spazio affine X. A priori non ha
senso scrivere la somma
d
"
λi Pi =?
i=0
per dei coefficienti λi ∈ K, dal momento che non abbiamo definito prodotto di uno scalare
λi per un punto Pi (potremmo farlo solo moltiplicando vettori con scalari, non punti con
scalari).
Però, si può prendere un punto qualsiasi O ∈ X e definire tale somma solo nel caso
#d
λ
=
1:
i=0 i
$ d
%
d
d
"
"
"
−−→
λi Pi =
λi (OPi ) +
λi O
i=0
=
i=0
d
"
i=0
−−→
λi (OPi ) + O.
i=0
La somma non dipende dalla scelta di O:
d
"
i=0
⇐⇒
d
"
i=0
d
" −−→
−−→
λi (OPi ) + O =
λi (QPi ) + Q
i=0
λi (Pi − O − (Pi − Q)) + O − Q = 0
⇐⇒
d
"
i=0
λi (Q − O) + O − Q = 0
⇐⇒ 0 = 0.
Possiamo in questo modo definire anche il baricentro di d + 1 punti, interpretando λi come
masse (più propriamente, densità di massa). Se le masse sono uguali, il baricentro affine
(geometrico) ha λi = 1/(n + 1).
(14.10) Definizione. In uno spazio affine di dimensione n, si dice che d + 1 punti sono indipendenti se la dimensione del sottospazio affine generato è d, altrimenti si dicono dipendenti.
È chiaro che se sono indipendenti, allora d ≤ n. Due punti sono dipendenti se e solo se coincidono. Tre punti sono dipendenti se e solo se appartengono ad una stessa retta (e si dicono
allineati. Analogamente, quattro punti sono indipendenti se non sono contenuti in un piano,
per cui quattro punti sono dipendenti se e solo se appartengono ad uno stesso piano.
(14.11) d + 1 punti
. . . , xd sono dipendenti se e soltanto se esistono λ1 , . . . , λn non
# x0 , x1 ,−→
tutti nulli tali che di=0 λi −
x0 xi = 0.
Dimostrazione. Segue dalla definizione.
qed
Geometria I
121
(14.12) Nota. Due punti distinti nel piano sono sempre allineati. È vero che tre punti nello
spazio sono allineati (dipendenti) se e soltanto se il determinante della matrice 3 × 3 delle loro
coordinate è nullo? Quale direzione della doppia implicazione è vera e quale no?
(14.13) Definizione. Sia X uno spazio affine su campo K di dimensione n ≥ 1. Un
riferimento affine in X è (equivalentemente):
(i) Una scelta di n + 1 punti di X indipendenti (dal punto di vista affine).
−
→
(ii) Una scelta di un punto x0 di X e di n vettori indipendenti di X (cioè, di una base per
−
→
−
→
X , visto che dim( X ) = dim(X) = n).
(14.14) (Equazioni parametriche) Sia S ⊂ X un sottospazio affine. Allora se si sceglie un
riferimento affine P0 , P1 , . . . , Pd ∈ S si può scrivere S mediante le equazioni parametriche
come
d
"
−−→
S = {P0 +
ti P0 P1 : ti ∈ R},
i=1
o anche come
d
"
−−→
P = P0 +
ti P0 P1
i=1
(14.15) Nota. Ritroviamo qui le equazioni parametriche di rette (P = P0 + tv) e piani
(P = P0 + sv + tw).
(14.16) Nota. Come abbiamo visto nella nota (14.9), dati d + 1 punti P0 , . . . Pn in uno spazio
affine X di dimensione n si possono considerare i punti P che si scrivono come
P =
d
"
λ i Pi ,
i=0
d
"
λi = 1
i=0
con λi ∈ K. Questi sono tutti e soli i punti del sottospazio affine generato dai Pi , e i coefficienti
λi ∈ K sono unici, nel senso che se
P =
d
"
i=0
λi Pi ,
d
"
λi = 1,
i=0
=
d
"
i=0
λ!i Pi ,
d
"
λ!i = 1
i=0
allora λi = λ!i per ogni i. I (d + 1) elementi λi ∈ K si chiamano le coordinate baricentriche del
punto P . Quando K = R, gli insiemi dei punti con coordinate baricentriche positive o nulle
vengono chiamati
Segmenti per d = 1 (con estremi P0 e P1 );
Triangoli per d = 2 (con vertici P0 , P1 e P2 , e lati dati dai segmenti ottenuti ponendo λi = 0,
per i = 0, 1, 2).
Geometria I
122
In altre parole, il segmento che ha per estremi A, B ∈ An (R) si scrive come
AB = {λ0 A + λ1 B : λ0 ≥ 0, λ1 ≥ 0, λ0 + λ1 = 1}
−→
= {A + λ1 AB : 0 ≤ λ1 ≤ 1}.
I punti del triangolo che ha per vertici A, B, C ∈ An (R) sono gli elementi dell’insieme
ABC = {λ0 A + λ1 B + λ2 C : λ0 ≥ 0, λ1 ≥ 0, λ2 ≥ 0, λ0 + λ1 + λ2 = 1}
−→
−→
= {A + λ1 AB + λ2 AC : λ1 ≥ 0, λ2 ≥ 0, λ1 + λ2 ≤ 1}.
I lati del triangolo ABC sono
AB = {λ0 A + λ1 B + λ2 C : λ0 ≥ 0, λ1 ≥ 0, λ2 ≥ 0, λ0 + λ1 + λ2 = 1, λ2 = 0}
= {λ0 A + λ1 B : λ0 ≥ 0, λ1 ≥ 0, λ0 + λ1 = 1}
BC = {λ0 A + λ1 B + λ2 C : λ0 ≥ 0, λ1 ≥ 0, λ2 ≥ 0, λ0 + λ1 + λ2 = 1, λ0 = 0}
= {λ1 B + λ2 C : λ1 ≥ 0, λ2 ≥ 0, λ1 + λ2 = 1}
CA = {λ0 A + λ1 B + λ2 C : λ0 ≥ 0, λ1 ≥ 0, λ2 ≥ 0, λ0 + λ1 + λ2 = 1, λ1 = 0}
= {λ0 A + λ2 C : λ0 ≥ 0, λ2 ≥ 0, λ0 + λ2 = 1}.
Opzionale: piani affini finiti e quadrati latini, greco-latini e
magici
Problema dei 36 ufficiali (L. Euler, 1782):
C’è una delegazione di 36 ufficiali, ognuno dei quali appartiene ad uno dei 6 reggimenti (a, b, c, d, e, f ). I 6 gradi sono (α, β, γ, δ, ', ϕ), cioè colonnello, tenentecolonnello, maggiore, capitano, tenente, sottotenente. Possono formare un quadrato 6 × 6 in modo tale che ogni grado e reggimento è rappresentato in ogni riga
e in ogni colonna (equivalentemente, in ogni riga e in ogni colonna non compaiono
mai due reggimenti uguali o due gradi uguali)?
Un quadrato del genere si chiama anche “quadrato greco-latino”, perché i 36 elementi
possono essere rappresentati da aα, aβ, . . . f ', f ϕ.
Naturalmente lo stesso problema può essere posto per quadrati n × n, ed Eulero riuscì a
trovare soluzioni per ogni n tranne quelli per cui n ≡ 2 mod 4. Quindi congetturò che non
possono esserci soluzioni se n ≡ 2 mod 4.
La congettura fu dimostrata (con qualche errore) da Tarry (1901) per n = 6 (cioè Tarry
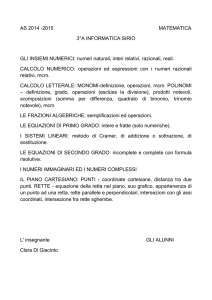
mostrò che non esiste la soluzione al problema per n = 6),20 ma confutata per il caso in
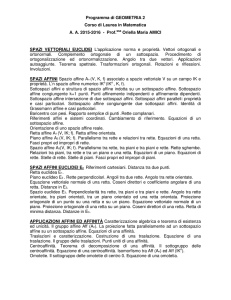
generale da Parker nel 1959, con un celebre controesempio con n = 10 (indicato nella figura
20
G. Tarry, “Le problème des 36 officiers,” C. R. Assoc. Fran. Av. Sci. Vol. 1(1900), p. 122–123, Vol.
2(1901), p. 170–203.
Geometria I
123
5 a pagina 127);21 nel 1960 fu dimostrato anche negli altri casi la congettura è falsa, cioè che
anche per per ogni n > 6, n ≡ 2 mod 4 esistono quadrati greco-latini22 In pratica esistono
per ogni n tranne n ∈ {2, 6}.
Un quadrato magico n × n è un quadrato in cui i primi n2 numeri compaiono in modo tale
che la somma delle cifre per colonne e per righe è costante. Osserviamo che se si ha un quadrato
greco-latino n × n, i cui elementi sono (i, j), con i, j = 0, . . . , n − 1, allora sostituendo al posto
di (i, j) il numero 1 + i + nj di ottiene un quadrato magico). Infatti con questa sostituzione
la somma dei coefficienti di ogni riga (e quella di ogni colonna) è uguale a (perché?)
n−1
"
i=0
(1 + i) + n
n−1
"
1
1
n
j = n + n(n − 1) + n2 (n − 1) = (n2 + 1).
2
2
2
j=0
Per costruire quadrati greco-latini, torniamo per un momento alla geometria affine.
(14.17) Nota. Le proprietà della Nota (13.12) possono essere prese come assiomi per una
struttura di geometria affine (finita). Più precisamente, una struttura di incidenza è una
coppia (X, L), dove X è un insieme finito (di punti), e L un insieme finito di rette, con la
relazione di incidenza x ∈ l, ∈ : X × L → {0, 1}. Se valgono anche gli assiomi
(i) Per ogni due punti distinti di X passa una unica retta.
(ii) Per ogni retta r e punto A .∈ r, esiste una unica retta per A che non interseca r (detta
parallela).
(iii) Esistono almeno 4 punti che non contengono terne di punti allineate.
allora X è un piano affine. Due rette di X si dicono parallele se non si intersecano, oppure
se sono uguali. Si tratta di una relazione di equivalenza: basta dimostrare che è transitiva
(dato che è simmetrica e riflessiva). Siano a, b e c tre rette distinte (se due di tre rette
coincidono allora evidentemente vale la proprietà transitiva per questo caso particolare), con
a ∩ b = ∅ = b ∩ c. Se esistesse un punto P ∈ a ∩ c, allora P .∈ b, e dunque esiste una unica retta
b̂ parallela a b passante per P . Ma sia a che c non intersecano b, e passano per P , dunque
a = c, cioè non è vero che le tre rette non sono distinte. Quindi P non esiste, cioè a è parallela
a c.
A proposito degli assiomi, in realtà si può prendere l’assioma
(iii)’ Esistono tre punti non collineari.
21
E. T. Parker, “Construction of some sets of mutually orthogonal Latin squares,” Proc. Amer. Math. Soc.,
Vol. 10(1959), p. 946–949. Si veda anche R. C. Bose and S.S. Shrikhande, “On the construction of sets of
mutually orthogonal Latin squares and the falsity of a conjecture of Euler”, Trans. Amer. Math. Soc., 95
(1960) 191–209.
22
R. C. Bose and S. S. Shrikhande, “On the falsity of Euler’s Conjecture about the non-existence of two
orthogonal latin squares of order 4t+2,” Proc. Nat. Acad. Sci. U. S. A. Vol. 45(1959), p. 734–737. R.C. Bose,
S.S. Shrikhande, and E.T. Parker, “Further results on the construction of mutually orthogonal Latin squares
and the falsity of Euler’s conjecture”, Canad. J. Math., 12 (1960) 189–203.
Geometria I
124
invece che il (iii). Occorre poi dimostrare che i due insiemi di assiomi sono equivalenti. . . 23
(14.18) Nota. Consideriamo una struttura di incidenza (X, L) come sopra. Se X ha h
elementi x1 , x2 , . . . xh e L ha k elementi l1 , l2 , . . . , lk , allora ogni relazione di incidenza
X × L → {0, 1} può essere descritta come una matrice A di tipo h × k in cui i coefficienti aij
sono 0 o 1: per i = 1 . . . h, e j = 1 . . . k si pone
!
1 se xi ∈ lj ;
aij =
0 se xi .∈ lj .
Nell’esercizio (7.25) vedremo come è possibile verificare gli assiomi di piano affine finito su
una matrice di incidenza. È possibile –teoricamente– scrivere un algoritmo a “forza-bruta” che
enumera tutte le possibili 2hk matrici di incidenza di geometrie affini finite, scarta quelle che
non soddisfano gli assiomi, e genera quindi una lista di tutte le geometrie finite (fino ad un
certo numero di punti). Un approccio del genere è anche praticabile?24
Per prima cosa contiamo quanti punti e quante rette ci sono in un piano affine finito (non
necessariamente un A2 (F)).
(14.19) Nota. Supponiamo che una retta di un piano affine X (definito a partire però dagli
assiomi della nota (13.12). . . ) abbia un numero finito di punti, n (deve essere n ≥ 2 perché. . . ).
Il piano si dice di ordine n. Dimostriamo che tutte le rette hanno n punti, che per ogni punto
passano n + 1 rette, e che in totale ci sono n2 punti e n2 + n rette.
Dimostrazione. Sia r la retta con n punti e sia P un punto non su r (che esiste per il (iii) della
nota (13.12) a pagina 116). Sia x il numero di rette per P . Delle x rette, una sola è parallela
a r (per (ii)); le x − 1 rette hanno intersezione con r e passano per P . Let intersezioni delle
rette con r sono necessariamente distinte, per cui x − 1 ≤ n. D’altro canto per ogni punto R
di r esiste una unica retta passante per R e per P (e queste rette sono tutte distinte): quindi
x − 1 ≥ n, cioè per ogni punto non sulla retta r passano n + 1 rette distinte.
Ora, siano P e Q due punti distinti. Per (iii), esiste sicuramente una retta l che non
contenga né P né Q (altrimenti, tutte le rette contengono almeno P oppure Q: tutte le rette
intersecano la retta per P e Q: non ci possono essere punti al di fuori di questa retta (per
l’assioma delle parallele): tutti i punti sono allineati). Il numero di rette per P (e il numero di
23
È chiaro che (iii) =⇒ (iii)’. Viceversa, se ci sono tre punti non allineati A, B, C, allora esistono le rette
r parallela ad AB e passante per C e s parallela a BC e passante per A. Se le rette r e s non si intersecano
(cioè, sono parallele), dato che la relazione di parallelismo è una relazione di equivalenza, allora BC (la retta
per B e C) è parallela a AB, e BC e AB si intersecano in B certamente, le due rette coincidono, cioè ABC
sono allineati (contro ipotesi). Quindi esiste D ∈ r ∩ s. I quattro punti A, B, C e D non contengono terne
di punti allineate. Osserviamo che AB e CD sono parallele e AD e CB sono parallele. Se tre dei quattro
punti fossero allineati allora le quattro rette AB, CD e AD e CB sarebbero tutte tra loro parallele, e quindi
coincidenti. Ma ABC non sono allineati per ipotesi e questo è assurdo.
24
Stimando molto per eccesso che un computer non può (e non potrà nei prossimi anni) eseguire più di 1015
operazioni al secondo.
Geometria I
125
rette per Q) è uno in più del numero di punti di l, e dunque il numero di rette per P è uguale
al numero di rette per Q.
Ora, se l è una seconda retta (e la retta r ha n punti), allora scegliamo un punto P non
su l e non su r (ancora, P deve esistere per (iii), altrimenti tutti i punti sono in l ∪ r, e non
vale l’assioma delle parallele . . . ). Segue che r e l hanno lo stesso numero di punti, e per
l’arbitrarietà di l la tesi.
Ora, se x è il numero totale di punti e y il numero totale di rette, abbiamo:
ny = (n + 1)x
(14.20)
(contando i punti al variare delle rette, alla fine ogni punto è stato contato esattamente n + 1
volte). Ma possiamo contare anche le rette con le coppie di punti distinti: per ognuna delle
x(x − 1)/2 coppie di punti distinti c’è una retta, ed ogni retta è contata n(n − 1)/2 volte in
questo modo. Dunque
x(x − 1) = yn(n − 1).
(14.21)
Risolviamo le due equazioni (14.20) e (14.21) otteniamo subito x = n2 e y = n2 + n.
qed
Quindi le matrici (possibili) di incidenza per i piani di ordine n hanno h = n2 righe e
k = n2 + n colonne, e quindi sono
2 2
2n (n +n) .
Il numero di secondi necessario (con un supercomputer ipotetico, capace di 1015 operazioni al
3
secondo) è almeno 2n (n+1) 10−15 , cioè. . .
Torniamo ora ai quadrati greco-latini, che fondamentalmente sono unioni di due quadrati
latini distinti (e con la proprietà che tutte le n2 coppie compaiono), dove per quadrato latino
si intende la parte a lettere latine. Più precisamente, un quadrato latino di ordine n è una
matrice n × n i cui coefficienti sono i numeri {1, 2, . . . , n} e in cui ogni riga e ogni colonna
contiene ogni numero esattamente una volta. Anche in questo caso si ha un quadrato magico:
le somme delle righe e delle colonne sono uguali a n(n + 1)/2, oppure, se si somma k ∈ Z ad
ogni coefficiente della matrice, n(n + 1)/2 + nk.
Non è difficile vedere che la tabella di moltiplicazione di un gruppo G di ordine n è di fatto
un quadrato magico: . . . (esercizio!).
Due quadrati latini ai,j e bi,j sono ortogonali se le coppie ordinate (ai,j , bi,j ) sono tutte
distinte al variare di i, j. Quindi, i quadrati greco-latini non sono altro che coppie di quadrati
latini ortogonali.
(14.22) Esempio. Un piano affine di ordine n genera n − 1 quadrati latini n × n nel modo
seguente: fissiamo un punto O del piano e due rette x e y distinte e passanti per O. Ci sono
n + 1 − 2 = n − 1 altre rette per O distinte, n rette parallele a x e n rette parallele a y.
Chiamiamo
x1 , . . . , x n
le rette parallele a x e
y1 , . . . , y n
Geometria I
126
le rette parallele a y. Sia z una delle n − 1 rette per O diverse da x e y, e
z = z1 , . . . , zn
le rette parallele a z. Per ogni i, j le due rette xi e yj non sono parallele, e quindi si intersecano
in un unico punto xi ∩ yj . Questo punto è contenuto in una sola retta parallela a z, cioè esiste
k ∈ {1, . . . , n} tale che xi ∩ yj ∈ zk . Fissato z, quindi, sia A la matrice n × n con coefficienti
ai,j determinati da
ai,j = k ⇐⇒ xi ∩ yj ∈ zk .
(14.23) La matrice ai,j è un quadrato latino.
Dimostrazione. Gli elementi della prima riga sono
a1,j = k ⇐⇒ x1 ∩ yj ∈ zk .
Fissato k, cioè zk , se x1 ∩ yj ∈ zk e x1 ∩ yl ∈ zk con j .= l, allora in zk ci sono due punti distinti
(perché appartengono alle due rette yj e yl parallele distinte) che appartengono anche a x1 ,
cioè x1 = zk , e questo è assurdo perché x1 è parallela a x, zk è parallela a z e x non è parallela
a z. Lo stesso per le altre righe e per le colonne.
qed
Quindi al variare di z nell’insieme delle n − 1 rette per O non parallele a x o a y otteniamo
n − 1 quadrati latini (esercizio (7.23)). Non solo sono quadrati latini distinti: sono a due a
due ortogonali!
(14.24) Se z e w sono due rette distinte per O non parallele a x e a y, e ai,j e bi,j i quadrati
latini generati come sopra, allora ai,j e bi,j sono ortogonali.
Dimostrazione. Occorre mostrare che per ogni coppia (h, k), con h, k ∈ 1, . . . , n esiste una
unica coppia di indici (i, j) tale che
!
ai,j = h
bi,j = k.
Questo è equivalente a chiedere che per ogni retta zh parallela a z e per ogni retta wk parallela
a w esiste unica la coppia di rette xi e yj tali che
!
xi ∩ yj ∈ zh
xi ∩ yj ∈ wk .
Ma zh e wk non sono parallele e quindi si intersecano in un unico punto. Esiste una unica xi
che passa per questo punto, ed esiste una unica yj che passa per questo punto (sono fasci di
rette parallele!). Quindi xi ∩ yj ∈ zh ∩ wk come volevasi dimostrare.
qed
Geometria I
127
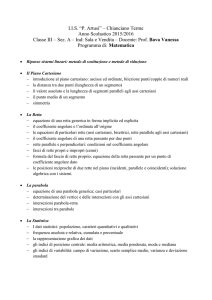
Figura 5: Raffigurazione del controesempio alla congettura di Eulero per n = 10. È alla base
della struttura del romanzo La Vie – mode d’emploi (1978) di Georges Perec (1936 - 1982), e
di alcuni quadri/decorazioni.
Quindi per ogni piano affine finito di ordine n ≥ 3 è possibile trovare quadrati greco-latini.
Ma per quali n ci sono piani affini finiti? Certamente se n è l’ordine di un campo finito (per
esempio, se n è primo25 ), altrimenti non è una domanda facile. Possiamo stabilire che non ci
sono piani affini finiti di ordine 6 (altrimenti ci sarebbe una soluzione per il problema dei 36
ufficiali di Eulero).
25
I campi finiti hanno ordine n = pk per p primo e k intero. La Prime Power Conjecture congettura che ci
sia un piano affine di ordine n se e soltanto se n è la potenza di un primo.
Geometria I
128
Esercizi: foglio 7
(7.1) Dimostrare la proposizione (13.5): supponiamo di avere un insieme non vuoto X e uno
−
→
−
→
−→
spazio vettoriale X , insieme con una funzione X × X → X , indicata da (A, B) #→ AB che
soddisfa i due assiomi:
−
→
−→
(i) ∀A ∈ X, ∀v ∈ X , ∃ unico B ∈ X : AB = v.
−→ −−→ −→
(ii) ∀A, B, C ∈ X, AB + BC = AC
Allora X è spazio affine rispetto all’azione
−
→
(v, A) ∈ X × X #→ A + v,
−→
dove si definisce A + v l’unico punto B ∈ X tale che AB = v.
(7.2) Dimostrare il lemma (13.9) a pagina 114.
(7.3) Dimostrare che due rette distinte di uno spazio affine si intersecano in al più un punto.
Dedurre che per due punti distinti passa una unica retta.
(7.4) Dimostrare che se A e r sono un punto e una retta di uno spazio affine X, con A .∈ r,
allora esiste un unico piano di X che contiene sia A che r.
*(7.5) Sia l una retta del piano affine A2 (R). Dimostrare che l non può incontrare tutti i lati
di un triangolo.
(7.6) Dimostrare che il segmento che unisce i punti medi di due lati di un triangolo è parallelo
al terzo lato.
(7.7) Dimostrare che, se V è uno spazio vettoriale e v ∈ V , V = v + V = {v + w, w ∈ V }.
(7.8) Dimostrare che se S ⊂ An (K) è un sottospazio affine e v ∈ K n è un vettore non nullo,
allora S è parallelo al suo traslato v + S (S 2 (v + S)). Determinare per quali v ∈ K n si ha
che S ∩ (v + S) = ∅.
x
0
1
3
(7.9) Si consideri la retta r in A (R) di equazioni parametriche y = 1 + t 2 . Scrivere
z
2
3
1
l’equazione della parallela s a r passante per 1.
1
(7.10) Determinare il piano/i piani (le equazioni di) che contengono le due rette r e s
dell’esercizio (7.9).
Geometria I
129
(7.11) Scrivere l’equazione della retta per i due punti A, B ∈ A4 (R)
√
1
√2
−1
− 2
√
A=
2 , B = 1 .
√
− 2
−1
(7.12) Scrivere l’equazione della retta per i due punti A, B ∈ A4 (C)
i
1
−i
−1
A=
i , B = 1 .
−1
−i
(7.13) Dimostrare che due rette non parallele nel piano affine si intersecano esattamente in
un punto.
−→ −→
(7.14) Dimostrare che rapporto AC : AB di tre punti ABC allineati in uno spazio affine
An (K) su campo K esiste ed è unico in K. Cosa succede se si permutano i tre punti? Se
−→ −→
AC : AB = ρ, esprimere in funzione di ρ i rapporti
−−→ −→
BC : BA = . . .
−→ −→
AB : AC = . . .
−→ −−→
CA : CB = . . .
−→ −−→
BA : BC = . . .
−→ −−→
CA : CB = . . .
*(7.15) (Teorema di Talete) Siano l1 , l2 e l3 rette parallele e distinte del piano affine A2 (R), e
r1 , r2 rette non parallele a l1 , l2 , l3 . Per l’esercizio precedente (7.13), le intersezioni li ∩ rj per
i = 1, 2, 3 e j = 1, 2 sono sei singoli punti, che chiamiamo Pi,j . Dimostrare che esiste ρ ∈ R
tale che
!−−−−→
−−−−→
P1,1 P3,1 = ρP1,1 P2,1
−−−−→
−−−−→
P1,2 P3,2 = ρP1,2 P2,2 .
(7.16) Determinare quali delle
1
2
2, 3,
3
1
seguenti terne di punti di A3 (R) sono allineate:
3
2
4
3
1
1
2
1 ; 4, 6, 5 ; 0, 1, 1 .
2
6
2
4
0
0
1
(7.17) Considerare le tre terne di punti dell’esercizio precedente. Siano S1 , S2 e S3 i sottospazi
affini di A3 (R) generati da esse. Determinare quali tra S1 , S2 e S3 sono parallele, sghembe o
incidenti.
Geometria I
130
(7.18) Un piano e una retta in A3 (R) possono essere sghembi?
, - , - , 0
1
2
,
di A2 (R). Se costituiscono un riferimento
,
(7.19) Si considerino i tre punti
2
1
2
affine, scrivere esplicitamente il cambio di coordinate: un punto di coordinate (generiche) x, y
si scriverà come . . .
0
0
1
0 1 0
(7.20) Determinare l’equazione del piano di A4 (R) passante per i tre punti
0, 0, 1.
3
2
1
1/3
0
0
1
0
1
0
, , , 1/3 costituiscono un
(7.21) Determinare se i quattro punti di A4 (R)
0 0 1 1/3
2
3
2
1
4
riferimento affine per un opportuno sottospazio tridimensionale di A (R). Se sì, scrivere le
equazioni del piano dell’esercizio precedente (7.20) in queste coordinate.
*(7.22) Rappresentare in un grafo la struttura di piano affine per A2 (GF (3)), dove GF (3) = F3
(9 punti e 12 rette).
*(7.23) Dimostrare che le matrici generate da un piano affine come nell’esempio (14.22) di
pagina 125 sono quadrati latini.
(7.24) Dimostrare che tre punti A = (a1 , a2 ),
allineati se e solo se il determinante
a1 b1
det a2 b2
1 1
B = (b1 , b2 ) e C = (c1 , c2 ) di A2 (K) sono
c1
c2 = 0.
1
(7.25) Sia (X, L) la struttura di incidenza (cfr. nota (14.17) a pagina 123) di un piano affine
finito di ordine n e A la sua matrice di incidenza associata (cfr. nota (14.18) a pagina 124).
(i) Mostrare che A è una matrice n2 × (n2 + n) (cfr. nota (14.19) a pagina 124). Dedurre
una stima degli n per cui è teoricamente possibile enumerare le geometrie finite a partire
dall’elenco delle matrici A.
(ii) Mostrare che se a e b sono le colonne j-esima e j̄-esima di A, allora il prodotto scalare
2
standard a · b (in Rn ) è uguale a
n se j = j̄;
a · b = 1 se lj e lj̄ non sono parallele
0 se lj e lj̄ sono parallele e distinte.
Geometria I
131
(iii) Mostrare che se a e b sono le righe i-esima e ī-esima di A, allora il prodotto scalare
2
standard a · b (in Rn +n ) è uguale a
!
n + 1 se i = ī;
a·b=
1
se i .= ī.
(iv) Dedurre che (At indica la matrice trasposta di A, Jq indica la matrice q × q che ha tutti
1 per coefficienti, Iq la matrice identica q × q) se Pn2 +n indica la matrice che rappresenta
la relazione di parallelismo in L = {l1 , . . . , ln2 +n }, allora si ha
At A = nIn2 +n + Jn2 +n − Pn2 +n
AAt = nIn2 + Jn2 .
(v) Esplicitare l’assioma delle parallele in funzione dei coefficienti di A.