UNIVERSITA’ DEGLI STUDI DI TRENTO
SCUOLA DI SPECIALIZZAZIONE ALL’INSEGNAMENTO SECONDARIO
INDIRIZZO SCIENTIFICO MATEMATICO FISICO INFORMATICO
classe A049 matematica e fisica
Unità didattica
GEOMETRIE
NON EUCLIDEE
Dott. Mario Sandri
Matricola 117039
Anno Accademico 2005/2006
Geometrie non euclidee
Mario Sandri
INDICE DEI CONTENUTI
Pagina 4
Destinatari
Pagina 4
Prerequisiti
Pagina 4
Accertamento dei prerequisiti
Pagina 5
Obiettivi
Pagina 5
Obiettivi generali
Pagina 5
Obiettivi trasversali
Pagina 6
Obiettivi specifici
Pagina 6
Conoscenze (obiettivi cognitivi)
Pagina 6
Competenze (obiettivi operativi)
Pagina 6
Capacità (obiettivi metacognitivi)
Pagina 7
Pagina 7
Sviluppo dei contenuti
Storia delle geometrie non euclidee
Pagina 7
Introduzione
Pagina 8
Euclide: vita e opere
Pagina 9
Gli Elementi
Pagina 12
Il V Postulato
Pagina 13
La teoria delle parallele
Pagina 13
Primi tentativi di dimostrazione del V postulato
Pagina 16
Girolamo Saccheri
Pagina 18
La “marcia di avvicinamento” alle geometrie non euclidee
Pagina 19
La nascita delle geometrie non Euclidee: Lobacewskij, Bolyai,
Riemann
Pagina 21
L’assiomatizzazione moderna della geometria
Pagina 23
Modelli per la geometria di Lobacewskij
Pagina 27
Il modello della geometria di Riemann
Pagina 30
La geometria sulla sfera
Pagina 30
La somma degli angoli di un triangolo
Pagina 30
Rette parallele. I postulati di Euclide
Pagina 32
Il quinto postulato
Pagina 34
Rette parallele tagliate da una trasversale
Pagina 36
Somma degli angoli di un triangolo
Pagina 36
Punti all'infinito
Pagina 2
Geometrie non euclidee
Mario Sandri
Pagina 38
La geometria sulla sfera
Pagina 40
Circonferenze massime
Pagina 43
I percorsi più brevi
Pagina 46
Il concetto unificante di linea geodetica
Pagina 47
Geodetiche su una superficie cilindrica
Pagina 52
Geodetiche sul cubo
Pagina 54
Curvatura
Pagina 57
Geodetiche e curvatura intrinseca
Pagina 59
Circonferenze intrinseche
Pagina 62
Geodetiche e curvatura estrinseca
Pagina 63
La geometria di S2 è non euclidea
Pagina 65
La geometria di S2 è una geometria ellittica
Pagina 66
Triangoli sferici
Pagina 68
Due questioni tecniche
Pagina 70
Somma degli angoli di un triangolo sferico
Pagina 73
La formula ellittica α + β + γ = π + A
Pagina 75
Le tre geometrie
Pagina 77
Curvatura di una superficie
Pagina 81
Geometrie in uno spazio non omogeneo
Pagina 83
Il modello di Poincaré
Pagina 85
Metodologie didattiche
Pagina 85
Materiali e strumenti utilizzati
Pagina 86
Controllo dell’apprendimento
Pagina 86
Valutazione
Pagina 86
Recupero e approfondimento
Pagina 86
Tempi dell’intervento didattico
Pagina 87
Bibliografia
Pagina 3
Geometrie non euclidee
Mario Sandri
DESTINATARI
Questa unità didattica è rivolta a studenti del 5° anno del Liceo Scientifico e del Liceo
Scientifico P.N.I.
PREREQUISITI
•
Conoscere i fondamenti della geometria
•
Conoscere i fondamenti della geometria euclidea
•
Conoscenza delle funzioni trigonometriche
•
Conoscere la terminologia matematica
•
Conoscere la terminologia geometrica
•
Conoscere le caratteristiche di una sfera
•
Conoscere le figure geometriche
•
Saper fare calcoli letterari
•
Saper fare calcoli numerici
ACCERTAMENTO DEI PREREQUISITI
Questa unità didattica prevede che l’alunno abbia completamente acquisito nelle unità didattiche
precedenti le conoscenze e le competenze sui concetti fondamentali della geometria e sulla
terminologia specifica della disciplina, nonché su concetti fondamentali della matematica quali la
trigonometria, le caratteristiche delle figure geometriche e il calcolo letterale e numerico.
Come accertamento dei prerequisiti si accettano i risultati delle verifiche sommative delle unità
didattiche precedenti, pur ritenendo necessario condurre una lezione dialogata, durante la quale
l’insegnante verifica ulteriormente le conoscenze ponendo alcune domande opportune.
Alcuni punti essenziali e di strategica importanza sono da rivedere, integrare e rinforzare in
classe, durante la prima ora dell’unità didattica, con modalità dialogica-interattiva. Gli studenti
carenti in determinati argomenti, saranno invitati, entro la successiva lezione, a rivedere le
tematiche in questione.
Pagina 4
Geometrie non euclidee
Mario Sandri
OBIETTIVI
Obiettivi generali
•
Acquisire le conoscenze, competenze e capacità previste dall’unità didattica per l’argomento
geometrie non euclidee
•
Contribuire a sviluppare e soddisfare l’interesse degli studenti per la matematica, in
generale, e per la geometria, in particolare
•
Saper utilizzare consapevolmente procedure matematiche nell’ambito geometrico
•
Riconoscere il contributo dato dalla geometria allo sviluppo delle scienze musicali
•
Migliorare l’abilità di lettura di figure evidenziando in tal senso anche capacità critiche
•
Motivare gli alunni ad attività di studio teorico degli aspetti quotidiani della geometria
•
Contribuire a rendere gli studenti in grado di affrontare situazioni problematiche di natura
geometrica avvalendosi dei modelli più adatti alla loro rappresentazione
•
Condurre ad un appropriato utilizzo del lessico specifico della geometria e a saper
argomentare con proprietà di espressione e rigore logico
•
Sviluppare il senso critico e la capacità di correggere errori
•
Acquisire un’adeguata conoscenza e comprensione dei contenuti proposti insieme alla
consapevolezza del proprio stile di apprendimento
•
Possedere e migliorare il metodo di studio
•
Abituare ad un metodo autonomo di lavoro, consolidando la capacità progettuale ed
organizzativa
Obiettivi trasversali
•
Educare gli alunni ad un comportamento corretto e responsabile verso compagni ed
insegnanti e al rispetto reciproco nei rapporti interpersonali
•
Sviluppare attitudine alla comunicazione favorendo lo scambio di opinioni tra docente e
allievo e tra allievi
•
Proseguire ed ampliare il processo di preparazione scientifica e culturale degli studenti
•
Contribuire a sviluppare lo spirito critico e l’attitudine a riesaminare criticamente ed a
sistemare logicamente le conoscenze acquisite
Pagina 5
Geometrie non euclidee
Mario Sandri
Obiettivi specifici
Conoscenze (obiettivi cognitivi)
•
Conoscere gli assiomi della geometria euclidea
•
Conoscere gli assiomi delle geometrie non euclidee
•
Conoscere la storia della geometria
•
Conoscere il comportamento della geometria su una sfera
•
Conoscere il significato geometrico di grandezze comunemente adottate nel gergo
fisico-matematico
Competenze (obiettivi operativi)
•
Saper determinare la curvatura di una superficie
•
Saper determinare le caratteristiche di una superficie
•
Saper determinare il tipo di geometria
•
Saper determinare l’area di un triangolo
•
Saper determinare il comportamento della geometria su qualsiasi superficie
Capacità (obiettivi metacognitivi)
•
Riconoscere la stretta analogia tra geometria e mondo fisico
•
Acquisire la capacità di leggere ed interpretare fenomeni del mondo reale e fisico,
applicando le competenze geometrico-matematiche acquisite
•
Saper utilizzare le conoscenze e le competenze acquisite per risolvere problemi
•
Essere in grado di riconoscere in contesti diversi la presenza di geometrie non
euclidee ed essere in grado di trarre informazioni sul fenomeno che rappresentano,
utilizzando le conoscenze e competenze acquisite.
Pagina 6
Geometrie non euclidee
Mario Sandri
SVILUPPO DEI CONTENUTI
Porro nemo est qui dubitet de veritate expositi Pronunciati…
[Nessuno dubita della verità del V postulato…]
Gerolamo Saccheri, 1733
... sappiamo che se andiamo oltre questa stanza e guardiamo molto più lontano, il modello euclideo
non funziona più. E' adatto per un numero ristretto di casi, ma non va bene in altre situazioni.
Allora, cosa fanno i fisici? Cercano di scoprire quali modelli siano adatti. Ma a un matematico,
voglio dire a un matematico puro, non importa se i modelli da lui immaginati possano essere
applicati o no. Un matematico puro costruisce dei bei modelli, geometrici, e non si cura se tali
modelli possano essere usati per descrivere l'universo oppure no. L'importante è che siano belli.
Serge Lang, 1985
STORIA DELLE GEOMETRIE NON EUCLIDEE
Introduzione
La Matematica è stata considerata per millenni come una costruzione di conoscenze, basata su
fondamenta solide e sicure e innalzata in modo sistematico e produttivo per ottenere una serie di
verità inconfutabili e coerenti tra loro. "La Matematica non è un’opinione" è una frase, forse banale,
ma che sottolinea il senso di rigore assoluto che gli uomini hanno sempre ritenuto, e ritengono
tuttora, implicito in tale disciplina.
Nel libro "L’ultimo teorema di Fermat" l’autore Simon Singh scrive: "La ricerca di una
dimostrazione matematica è la ricerca di una conoscenza che è più assoluta della conoscenza
accumulata da ogni altra disciplina. Il desiderio di una verità definitiva, ottenuto attraverso il
metodo della dimostrazione è ciò che ha guidato i matematici negli ultimi 2500 anni."
Proprio su questa necessità di massimo rigore si è andata sviluppando, per rendere sempre più
solide le basi della geometria, la ricerca sul quinto postulato di Euclide, ricerca che ha avuto poi una
soluzione veramente inattesa.
Una delle massime menti filosofiche del 1700, Immanuel Kant, scriveva: "Lo spazio è una
rappresentazione necessaria a priori, la quale sta a fondamento di tutte le istituzioni esterne. Non si
può mai formare la rappresentazione che non vi sia spazio, sebbene si possa benissimo pensare che
Pagina 7
Geometrie non euclidee
Mario Sandri
in esso non si trovi nessun oggetto. Lo spazio viene quindi considerato come la condizione della
possibilità dei fenomeni, non come una determinazione dipendente da essi: ed è una
rappresentazione a priori, la quale è necessariamente a fondamento dei fenomeni esterni."
Si può ben capire, allora, quali turbamenti, esitazioni e ripensamenti abbiano attraversato le
menti e i cuori di quei tre matematici dell’800, Lobacevskji, Bolyai e Gauss che, pressoché
contemporaneamente e in tre nazioni diverse e distanti tra loro, l’Ungheria, la Russia e la Germania,
stavano, con le loro intuizioni e i loro studi, giungendo ad una medesima conclusione: la geometria
di Euclide poteva non essere più il modello ideale del sapere assoluto poiché non possedeva più
quei caratteri di verità e di necessità assoluta che fino ad allora le erano stati attribuiti. I risultati
delle loro ricerche si trovavano a cozzare contro le affermazioni dei grandi della scienza, ma,
nonostante ciò, si giunse in pochi anni a capire e soprattutto ad accettare che era possibile pensare
ad altre geometrie.
Euclide: vita e opere
Le notizie biografiche su Euclide sono scarse. Sappiamo che visse intorno al 300 a.C. e che fu
chiamato ad Alessandria dal re Tolomeo I per insegnare matematica nella prestigiosa scuola da esso
stesso istituita e nota con il nome di Museo. Per questo motivo è a noi noto col nome di Euclide di
Alessandria. Probabilmente Euclide fu allievo di Platone e le leggende lo dipingono come uomo di
temperamento gentile ma deciso. Si raccontano due aneddoti sulla sua vita. Al re Tolomeo, che gli
avrebbe chiesto se esistesse un modo rapido per imparare la geometria, Euclide avrebbe risposto
che non esistono in geometria "vie regie". Si racconta anche che un giorno un allievo chiese ad
Euclide a cosa servisse la geometria, e lui in risposta, prima di cacciarlo via, ordinò ad un suo
schiavo di dargli una moneta perché l’allievo voleva trarre guadagno da ciò che aveva studiato.
Molte sono le opere scritte da Euclide, di queste alcune sono arrivate fino a noi, mentre di altre,
andate perdute, siamo venuti a conoscenza attraverso gli scritti di altri autori. Euclide non si
interessò solo di matematica ma trattò argomenti riguardanti svariati campi di conoscenze,
dall’astronomia all’ottica, dalla musica alla meccanica. Ricordiamo i Dati, dove determina le
condizioni sotto le quali i problemi possono essere risolti; la Divisione delle figure, dove studia il
modo di dividere con delle rette alcune superfici piane in modo da rispettare certe proporzioni tra le
aree; gli Pseudaria (o False conclusioni); un trattato sulle Coniche; un’opera sui Porismi che se
fosse giunta fino a noi ci avrebbe dato l’idea di quanto Euclide si fosse avvicinato alla geometria
analitica. Senza dubbio però l’opera che ha dato fama all’autore e che per noi è oggi un sinonimo di
Euclide stesso sono gli Elementi.
Pagina 8
Geometrie non euclidee
Mario Sandri
Gli Elementi
Gli Elementi sono sostanzialmente un trattato organico sulle parti fondamentali della geometria
e dell’aritmetica. La formazione degli Elementi inizia probabilmente con Talete e nell’arco dei tre
secoli successivi si perfeziona fino a raggiungere l’apice con Euclide. Proclo vide in Euclide colui
che riuscì ad ordinare e a completare i risultati raggiunti dai suoi predecessori. Nella scuola dove
Euclide impartiva i suoi insegnamenti, l’Accademia, era in atto un movimento critico di revisione
dei principi della geometria che spinsero il nostro autore a dare un assetto rigoroso alle conoscenze
fino ad allora raggiunte. L’originalità dell’opera, che sostanzialmente è un manuale, non risiede
dunque nei risultati personali ottenuti dall’autore, ma nel nuovo ordinamento dato al materiale che
meglio rispondeva all’ideale di rigore geometrico che ha reso l’opera famosa fino ai giorni nostri.
Gli Elementi sono suddivisi in 13 Libri, i primi 6 riguardano la geometria piana, i successivi 3 la
teoria dei numeri, il decimo tratta degli incommensurabili e gli ultimi 3 riguardano la geometria
solida. Il Libro I inizia ‘brutalmente’ con l’elenco degli elementi di partenza: 23 Termini, 5
Postulati e 5 Nozioni Comuni, dai quali Euclide deduce i successivi risultati. I Termini potrebbero
essere interpretati come definizioni, non nel senso da noi dato attualmente (Euclide non definisce a
partire da concetti primitivi) ma come descrizioni di enti geometrici supposti già esistenti; Euclide
suppone che chi legge deve avere già un’idea di questi enti e quindi li descrive come "oggetti
geometrici" che possono comunque essere disegnati con riga e compasso. I Postulati sono
proposizioni primitive che si riferiscono agli enti geometrici definiti in precedenza. Essi avrebbero
carattere essenzialmente costruttivo e garantirebbero l’esistenza di certi elementi. Le Nozioni
Comuni, dette anche Assiomi, sono anch’esse delle nozioni primitive riguardanti però non solo la
geometria e si potrebbe dire che sono "regole di ragionamento".
Aristotele aveva gia fatto una distinzione tra assiomi e postulati dicendo che i primi devono
essere convincenti di per se stessi e sono verità comuni a tutte le scienze, mentre i secondi sono
meno evidenti e non presuppongono l’assenso dell’allievo poiché riguardano solo la disciplina in
questione. Non sappiamo se Euclide condividesse questa idea certo è che i matematici moderni non
fanno più alcuna distinzione tra assioma e postulato.
La maggior parte delle proposizioni del Libro I sono familiari agli studenti di scuola superiore
che abbiano seguito un corso di geometria. Esse comprendono i teoremi sulla congruenza dei
triangoli, riguardano semplici costruzioni con riga e compasso, disuguaglianze relative ai lati e agli
angoli di un triangolo, proprietà di rette parallele e terminano con la dimostrazione del teorema di
Pitagora e del suo reciproco. È facile per noi, alla luce degli sviluppi successivi, criticare l’opera di
Euclide ma non dimentichiamo che per più di duemila anni gli Elementi hanno costituito la più
rigorosa e razionale sistemazione della matematica.
Pagina 9
Geometrie non euclidee
Mario Sandri
Riportiamo di seguito gli elementi di partenza del Libro I così come Euclide li aveva elencati1
Termini
I Punto è ciò che non ha parti
II Linea è lunghezza senza larghezza
III Estremi di una linea sono punti
IV Linea retta è quella che giace ugualmente rispetto ai punti su essa
V Superficie è ciò che ha soltanto lunghezza e larghezza
VI Estremi di una superficie sono linee
VII Superficie piana è quella che giace ugualmente rispetto alle rette su essa
VIII Angolo piano è l’inclinazione reciproca di due linee su un piano, le quali si incontrino
fra loro e non giacciano in linea retta
IX Quando le linee che comprendono l’angolo sono rette, l’angolo si chiama rettilineo
X Quando una retta innalzata su una (altra) retta forma gli angoli adiacenti uguali tra loro,
ciascuno dei due angoli uguali è retto, e la retta innalzata si chiama perpendicolare a
quella su cui è innalzata
XI Angolo ottuso è quello maggiore di un retto
XII Angolo acuto è quello minore di un retto
XIII Termine è ciò che è estremo di qualche cosa
XIV Figura è ciò che è compreso da uno o più termini
XV Cerchio è una figura piana compresa da un’unica linea (che si chiama circonferenza)
tale che tutte le rette, le quali cadano sulla (stessa) linea, (cioè sulla circonferenza del
cerchio), a partire da un punto fra quelli che giacciono internamente alla figura, sono
uguali fra loro.
XVI Quel punto si chiama centro del cerchio
XVII Diametro del cerchio è una retta condotta per il centro e terminata da ambedue le parti
dalla circonferenza del cerchio, la quale retta taglia anche il cerchio per metà
XVIII Semicerchio è la figura compresa dal diametro e dalla circonferenza da esso tagliata.
E centro del semicerchio è quello stesso che è anche centro del cerchio
XIX Figure rettilinee sono quelle comprese da rette, vale a dire: figure trilatere quelle
comprese da tre rette, quadrilatere quelle comprese da quattro, e multilatere quelle
comprese da più di quattro rette
1
da Gli Elementi di Euclide, a cura di A. Frajese e L. Macioni, UTET, Torino 1988
Pagina 10
Geometrie non euclidee
Mario Sandri
XX Delle figure trilatere, è un triangolo equilatero quello che ha i tre lati uguali, isoscele
quello che ha soltanto due lati uguali, e scaleno quello che ha i tre lati disuguali
XXI Infine, delle figure trilatere, è triangolo rettangolo quello che ha un angolo retto,
ottusangolo quello che ha un angolo ottuso, ed acutangolo quello che ha i tre angoli
acuti
XXII Delle figure quadrilatere, è quadrato quella che è insieme equilatera ed ha gli angoli
retti, rettangolo quella che ha gli angoli retti, ma non è equilatera, rombo quella che è
equilatera, ma non ha gli angoli retti, romboide quella che ha i lati e gli angoli opposti
uguali fra loro, ma non è equilatera né ha gli angoli retti. E le figure quadrilatere oltre a
queste si chiamano trapezi
XXIII Parallele sono quelle rette che, essendo nello stesso piano e venendo prolungate
illimitatamente dall’una e dall’altra parte, non si incontrano fra loro da nessuna delle
due parti
Postulati
I Risulti postulato: che si possa condurre una linea retta da un qualsiasi punto ad ogni altro
punto
II E che una retta terminata (=finita) si possa prolungare continuamente in linea retta
III E che si possa descrivere un cerchio con qualsiasi centro ed ogni distanza (=raggio)
IV E che gli angoli retti siano uguali fra loro
V E che, se una retta venendo a cadere su due rette forma gli angoli interni e dalla stessa
parte minori di due retti (= tali che la loro somma sia minore di due retti), le due rette
prolungate illimitatamente verranno ad incontrarsi da quella parte in cui sono gli angoli
minori di due retti (= la cui somma è minore di due retti)
Nozioni Comuni
I Cose che sono uguali ad una stessa cosa sono uguali anche tra loro
II E se cose uguali sono addizionate a cose uguali, le totalità sono uguali
III E se da cose uguali sono sottratte cose uguali, i resti sono uguali
IV E cose che coincidono fra loro sono fra loro uguali
V Ed il tutto è maggiore della parte
Pagina 11
Geometrie non euclidee
Mario Sandri
Il V Postulato
E che, se una retta venendo a cadere su due rette forma gli angoli interni e dalla stessa parte
minori di due retti, le due rette prolungate illimitatamente verranno ad incontrarsi da quella parte
in cui sono gli angoli minori di due retti.
Euclide cerca di dare un assetto rigoroso alla geometria a partire da verità evidenti e da postulati
che garantiscono l’esistenza di oggetti effettivamente costruibili con riga e compasso; ma mentre
per i primi 4 è facile individuare il carattere di costruttività , per l’ultimo, il V, questo aspetto non è
così evidente. Il I postulato infatti garantisce la possibilità di condurre una retta (concepita come
segmento) passante per due punti dati; con il II è possibile prolungare una retta (segmento)
indefinitamente; il III ci permette di costruire (con un compasso ideale!) circonferenze di raggio
qualunque; il IV è necessario per garantire che l’angolo retto ottenuto costruendo due rette che
incontrandosi formano angoli adiacenti uguali, non dipende dalle rette considerate (con il termine X
Euclide definisce l’angolo retto come angolo ottenuto innalzando su una retta un’altra retta che
formi con la prima angoli adiacenti uguali). Il V postulato infine, e qui siamo al punto cruciale,
garantisce sì l’esistenza del punto di intersezione tra due rette che formano con una trasversale
angoli coniugati minori di due retti, ma non da alcuna indicazione su come si possa costruirlo. Ad
Euclide era gia chiara la differenza sostanziale tra i primi 4 postulati e l’ultimo, e fece lo sforzo di
dimostrare il maggior numero di teoremi evitando di ricorrere al V postulato.
Pagina 12
Geometrie non euclidee
Mario Sandri
La teoria delle parallele
Le prime proposizioni del Libro I convergono verso un risultato caratteristico della geometria
euclidea "la somma degli angoli interni di un triangolo è uguale a due angoli retti", e tale risultato è
fondato sulla teoria delle parallele. La teoria delle parallele è espressa essenzialmente in tre
proposizioni, la 27 e la 28 che non fanno ricorso al V postulato e la 29 che ne fa invece uso.
È da notare come Euclide intendesse mostrare fino a che punto si poteva giungere senza fare
ricorso al V postulato dimostrando, ad esempio, la proposizione 17 "in ogni triangolo due angoli,
comunque presi, sono minori di due retti", che poteva essere dedotta in modo elementare dalla
proposizione 32 "la somma degli angoli interni di un triangolo è uguale a due retti". Con le prime
28 proposizioni l’autore costruì una specie di geometria non euclidea, nel senso che non si tratta di
una geometria che nega il V postulato ma di una "geometria assoluta" che ne prescinde.
Primi tentativi di dimostrazione del V postulato
Le critiche al lavoro svolto da Euclide, nel mondo greco, non tardarono a venire. Si riteneva che
il V postulato non fosse abbastanza evidente per poterlo accettare senza dimostrazione e per di più
la proposizione inversa (proposizione 17) era stata dimostrata. Molti matematici si cimentarono
dunque nella dimostrazione del V postulato senza avere, però, grandi successi. Nella maggioranza
dei casi la dimostrazione si basava su ipotesi che andavano semplicemente a sostituirlo senza avere
peraltro un maggior carattere di evidenza e di costruttività.
Proclo (410-485) nel suo Commento al I libro di Euclide racconta ad esempio che Posidonio (I
sec. a.C.) cerca di aggirare l’ostacolo del V postulato dando una diversa definizione di rette
parallele come rette complanari ed equidistanti. Questa definizione e quella euclidea "parallele sono
quelle rette che, essendo nello stesso piano e venendo prolungate illimitatamente dall’una e
dall’altra parte, non si incontrano fra loro da nessuna delle due parti", non sono però equivalenti e
determinano due situazioni che possono presentarsi separatamente. Di ciò si rende conto anche
Proclo che, facendo riferimento ai lavori di Gemino (I sec a.C.), porta come esempio l’iperbole che
non interseca i propri asintoti e tuttavia non è da essi equidistante. Proclo stesso tenta una
dimostrazione introducendo prima l’ipotesi che "la distanza tra due punti presi su rette che si
intersecano può essere resa grande a piacere prolungando sufficientemente le rette" e poi l’ipotesi
che "la distanza tra due rette parallele rimane finita". Sempre Proclo ci racconta di come Tolomeo
(II sec d.C.) dimostri il postulato con il seguente ‘bizzarro’ ragionamento:
Pagina 13
Geometrie non euclidee
Mario Sandri
Siano AB e CD due rette parallele ed EF una trasversale. La somma degli angoli interni a
sinistra AFE e CEF o è maggiore o è minore o è uguale a due angoli retti. Ipotizzando che se per
una coppia di parallele si verifica ad esempio il I caso, altrettanto si verifichi per ogni altra coppia,
poiché le rette FB e ED sono parallele come lo sono le rette AF e CE segue che se AFE + CEF è
maggiore di due retti altrettanto accadrà per BFE + DEF. Ma allora AFE + CEF + BFE + DEF
è maggiore di quattro retti e ciò è assurdo. Allo stesso modo si dimostra che la somma dei due
angoli non può essere minore di due retti quindi AFE + CEF è uguale a due retti. Da questo segue
il V postulato.
E’ interessante seguire il ragionamento con il quale si pretendeva di dimostrare che due rette
tagliate da una terza non si incontrano anche quando la somma degli angoli coniugati è minore di
due retti, e quindi la non validità del V postulato.
Pagina 14
Geometrie non euclidee
Mario Sandri
Sia AC una trasversale delle due rette AB e CD ed E il punto medio di AC. Dalla parte di AC,
in cui la somma degli angoli interni è minore di due retti si prendano su AB e CD i segmenti AF e
CG uguali ad AE. Le rette AB e CD non possono incontrarsi tra i punti A, F, e C, G, perché in un
triangolo ciascun lato è minore della somma degli altri due. Si congiungano i punti F e G e si
ripeta la procedura determinando i punti H, K, L. Le rette non potranno intersecarsi tra i punti F,
K e G, L e poiché questa procedura potrà ripetersi indefinitamente segue che AB e CD non
possono incontrarsi.
Questo paradosso è simile a quello di Zenone su Achille e la tartaruga e lo stesso Proclo nota
che il ragionamento fatto dimostra solo che non si può raggiungere il punto di intersezione delle
rette e non che tale punto non esista.
Anche gli arabi si occuparono come i greci del V postulato. Ricordiamo i contributi dati da AlNarizi (IX sec) e da Nasir-Eddin (XIII sec). Il primo riporta una dimostrazione che sostanzialmente
è simile a quella di Posidonio perché fondata sull’ipotesi che esistano rette equidistanti. Il secondo
fonda il suo ragionamento sull’ipotesi che se due rette r ed s sono l’una perpendicolare e l’altra
obliqua al segmento AB, i segmenti di perpendicolare condotti da s su r sono minori di AB dalla
parte in cui AB forma con s un angolo acuto, sono maggiori di AB dall’altra parte
Pagina 15
Geometrie non euclidee
Mario Sandri
Con questa ipotesi Nasir-Eddin deduce prima che la somma degli angoli di un triangolo è
uguale a due retti e poi il V postulato. Per dimostrare il postulato euclideo egli inizia con il
dimostrare che se due rette sono una perpendicolare e l’altra obliqua ad una terza retta devono
necessariamente intersecarsi, fa poi ricorso al teorema della somma degli angoli interni di un
triangolo per ridurre il caso generale al caso particolare appena dimostrato.
Possiamo dire che i primi commentatori di Euclide, nel tentativo di risolvere il problema legato
al V postulato, seguirono fondamentalmente due direzioni: in un caso diedero una diversa
definizione di rette parallele, nell’altro sostituirono il postulato euclideo con un’altra proposizione, a
parer loro, più evidente. Il problema rimase aperto e durante il Rinascimento ricominciarono le
ricerche in tal senso che si conclusero solo nel XIX sec. con la nascita delle "geometrie non
euclidee".
Quando Euclide sistemò la geometria dandole un assetto assiomatico, si trovò di fronte ad una
difficoltà che non riuscì a risolvere positivamente. Egli voleva dimostrare i teoremi utilizzando
"verità evidenti" nel senso di proposizioni riguardanti "oggetti" effettivamente costruibili e
disegnabili con riga e compasso. Per esempio introduce la retta non come ente di lunghezza infinita
ma postula che ogni segmento può essere prolungabile in modo indefinito. L’obiettivo è dimostrare
i teoremi senza introdurre caratteristiche che non siano costruttive, e ci riesce sino alla proposizione
28. Tuttavia per dimostrare alcuni teoremi che risultano essenziali nello studio delle figure piane
deve introdurre il V postulato (assioma della parallela), che pur essendo sicuramente coerente con il
senso comune, non presenta però carattere costruttivo. Ricordiamo inoltre che negli Elementi
compare come Teorema (dimostrato senza utilizzare il V postulato) la proposizione contraria del V.
Girolamo Saccheri
Nel Rinascimento si registra il rifiorire delle considerazioni critiche sulla teoria delle parallele,
dopo la scoperta del "Commento" di Proclo. In particolare citiamo Pietro Cataldi (1552-1626) e
Giordano Vitale (1633-1711) in Italia, e John Wallis (1616-1703) in Inghilterra. Quest’ultimo
introduce una nuova idea e deduce il V dalla proposizione: "Data una qualsiasi figura, se ne può
sempre costruire un’altra simile (cioè con gli stessi angoli) di grandezza arbitraria". D’altro canto è
noto che nella geometria Euclidea è vera la proposizione di Wallis, per cui è stabilita l’equivalenza
delle due proposizioni. L’opera di Wallis è importante poiché lega le questioni connesse con il V
con la similitudine; dai suoi risultati si deduce che in una geometria in cui non valga il V non
esistono figure simili che non siano anche uguali, e di conseguenza non è possibile sviluppare la
teoria della similitudine. I tentativi di dimostrazione del V postulato continuarono ancora e nel 1763
Pagina 16
Geometrie non euclidee
Mario Sandri
lo studioso tedesco G.S. Klugel in una sua opera ne esamina ben 30. Fra questi, quello di gran lunga
più interessante è quello di Girolamo Saccheri.
Girolamo Saccheri (1667-1733), padre gesuita, studiò matematica a Milano sotto la guida di
Tommaso Ceva. Insegnò matematica e filosofia a Pavia e Torino. Sono da ricordare oltre ai suoi
lavori sul V, anche l’opera "Logica demonstrativa" del 1697, in cui si trova, per la prima volta,
esposta in modo assiomatico la logica. In tale lavoro si trova anche esposto il metodo, peraltro non
nuovo della "reductio ad absurdum" (dimostrazione per assurdo), che Saccheri utilizzerà
sistematicamente nei suoi lavori connessi con il V postulato; assumendo per ipotesi la negazione
della proposizione che si vuole dimostrare si giunge ad una contraddizione, ciò permette di
affermare che la proposizione di partenza è vera. Questa idea, è interessante poiché vi si trova in
embrione la tesi che la verità matematica coincida con la non contraddittorietà. L’opera nella quale
Saccheri tenta la dimostrazione del V postulato ha il titolo "Euclides ab omni naevo vindicatus, sive
conatus geometricus quo stabiliuntur prima ipsa universale geometriae principia" è pubblicata nel
1733, anno della sua morte, e questo spiega in parte la poca notorietà che l’opera ebbe al suo tempo.
Nei secoli precedenti ci furono molti matematici che tentarono di dimostrare direttamente il V
postulato; Saccheri nel suo tentativo di dimostrazione, utilizzando la "reductio ad absurdum" cioè
partendo dalla negazione del V postulato, è il primo che costruisce teoremi di geometria non
Euclidea, pertanto deve essere considerato il precursore delle geometrie non Euclidee.
E’ un problema tuttora aperto se l’opera di Saccheri sia stata conosciuta dai suoi successori.
L’opera è esaminata in dettaglio in un lavoro di G. S. Klugel e tale lavoro era presente nella
biblioteca di Gottinga. Pare inverosimile che Gauss, insegnando a Gottinga e avendo anch’egli
lavorato sul V postulato, non conoscesse tale opera e questo discorso vale anche per gli altri
matematici che si riallacciano a Gauss, ma di fatto nessuno nomina Saccheri. Soltanto nella seconda
metà dell’Ottocento Eugenio Beltrami, matematico italiano, riuscì a fare assegnare all’opera di
padre Girolamo il posto di rilievo che le spetta nella storia della matematica.
Pagina 17
Geometrie non euclidee
Mario Sandri
La "marcia di avvicinamento" alle geometrie non Euclidee
Tra la fine del XVIII secolo e l’inizio del XIX i tentativi di dimostrazione del V postulato
sembravano avvicinarsi sempre più allo scopo. Ricordiamo le significative opere di Johann Enrich
Lambert matematico svizzero (1728 - 1777) e soprattutto di Adrien Marie Legendre (1752-1833)
matematico francese che ebbe il merito di stimolare l’interesse per i problemi concernenti il V
postulato, soprattutto per la sua importante posizione accademica e per la semplicità con cui, nei
suoi più volte pubblicati "Elements de geometrie" tratta l’argomento. Ma si frapponeva sempre
qualche ostacolo e il risultato non era la dimostrazione del V postulato, ma la determinazione di una
proposizione ad esso equivalente. E così, dopo numerosi tentativi falliti cominciò a delinearsi l’idea
che:
il V postulato non fosse deducibile dagli altri postulati.
Questo ha significato un ribaltamento di prospettiva nell’affrontare il problema, poiché la
questione dell’indimostrabilità di una proposizione è tutt’altro che semplice; e il problema era (per
il tempo) di natura sostanzialmente nuova, occorrevano nuove tecniche e strumenti e l’utilizzo di
considerazioni di logica-matematica. Inoltre, oltre alle questioni di carattere puramente
tecnico/matematico, nella fase iniziale si dovettero superare difficoltà di natura sia psicologica che
culturale perché le nuove geometrie venissero prese seriamente in considerazione. Per un verso la
geometria Euclidea in secoli di predominio, aveva condizionato psicologicamente i suoi fruitori (i
matematici) abituandoli a considerarla l’unica vera; a questo va aggiunto il fatto che se il V
postulato poteva ritenersi poco intuitivo, la sua negazione lo era ancor meno. Nel 1781, poi, era
stata pubblicata la "Critica della ragion pura" del potente e stimato Immanuel Kant; in tale opera
viene esposta la famosa dottrina dello spazio e del tempo, la quale riconosce allo spazio il carattere
di "intuizione pura" a priori e connaturata con la mente umana; quindi lo spazio non può essere
concepito arbitrariamente. La direzione verso la quale stavano procedendo le ricerche sul V
postulato, cozzava così con il sistema di interpretazione del mondo da parte delle autorità
intellettuali dominanti.
A tal proposito non si può non citare il "Princeps mathematicorum" Karl Friedrich Gauss (17771855), il primo grande matematico a riconoscere la possibilità di nuove geometrie. La sua
attenzione era particolarmente attratta da una delle più note e significative conseguenze del V
postulato: la somma degli angoli interni di un triangolo è uguale ad un angolo piatto. Egli riteneva
che la conoscenza dello spazio fisico circostante fosse così limitata da non consentire di poter
affermare con assoluta certezza che, preso in tale spazio un qualsiasi triangolo, con lati di qualsiasi
Pagina 18
Geometrie non euclidee
Mario Sandri
dimensione, la somma delle ampiezze dei suoi angoli interni fosse sempre uguale ad un angolo
piatto. E a questo punto Gauss progettò, e forse anche realizzò, un esperimento fisico: partendo
dalla considerazione che un raggio di luce può essere considerato, nel senso della Fisica, come una
rappresentazione della retta, pensò di costruire un enorme "triangolo di luce" avente i vertici sulle
cime di tre montagne e i lati sui tre raggi di luce che congiungevano tali vette. Lo scopo di Gauss
era quello di misurare, anche in quel caso, la somma degli angoli interni di quel particolare e
particolarmente "grande" triangolo, per vedere se tale misura era ancora uguale ad un angolo piatto;
purtroppo però gli errori di misurazione gli impedirono di giungere a risultati significativi. Tutto ciò
non gli impedì, tuttavia, di continuare le sue ricerche e questo lo si evince dalla sua nutrita
corrispondenza con altri matematici, ma non pubblicò alcunché su questo argomento. In una lettera
inviata a Bessel il 27 gennaio 1829 egli scrive."…temo le strida dei beoti, qualora volessi
completamente esprimere le mie vedute…".
La nascita delle geometrie non Euclidee: Lobacewskij, Bolyai, Riemann
Le prime esposizioni pubbliche di geometrie non Euclidee sono dovute ai matematici
Lobacewskij (Russia) e Bolyai (Ungheria) attorno al 1830; ci troviamo di fronte ad uno
stupefacente caso di scoperta simultanea, si veda in merito la lettera che il padre di Bolyai invia a
suo figlio e la simpatica interpretazione naturalistica che ne da.
Nicolaj Ivanovic Lobacewskij (1793-1856), figlio di un modesto funzionario governativo,
rimase orfano a sette anni. Nonostante le difficoltà finanziarie della famiglia fu mandato a studiare
all’Università di Kazan, dove venne in contatto con ottimi professori provenienti dalla Germania,
tra cui J.M. Bartels (1769-1836), che era stato maestro anche di Gauss. Ventunenne, Lobacewskji
era già membro del corpo insegnante e nel 1827 fu nominato Rettore dell’Università di Kazan dove,
per tutto il resto della sua vita svolse attività didattica e amministrativa. Negli anni tra il 1826 ed il
1829 Lobacewskji si era pienamente convinto che il V postulato non potesse essere dedotto sulla
base degli altri quattro. Nel 1829-30 pubblicò sul "Messaggero di Kazan" un lavoro nel quale viene
esposta la nuova geometria, da lui chiamata "Geometria immaginaria", sviluppata sino alla
trigonometria ed al calcolo di aree e volumi. Con tale articolo egli era il primo matematico a fare il
passo rivoluzionario consistente nel pubblicare una nuova geometria (con termine moderno
denominata iperbolica) costruita specificatamente su un’ipotesi che era in diretta contraddizione con
il V postulato, la negazione dell’unicità della parallela. In dettaglio: per un punto C che giace al di
fuori della retta r si può tracciare nello stesso piano più di una parallela ad r. Da questo postulato
deduceva una armoniosa struttura geometrica che non presentava nessuna contraddizione logica
interna. Essa era sotto ogni punto di vista una geometria accettabile, ma appariva allo stesso
Pagina 19
Geometrie non euclidee
Mario Sandri
Lobacewskji così contrastante con il senso comune che egli la chiamò "geometria immaginaria " e
in seguito "Pangeometria". Ai primi scritti del 1829-30 ne seguirono altri nel 1835, ed infine nel
1856 compare "Pangeometria" che contiene un esposizione completa della nuova geometria. Gauss
lesse gli scritti del 1835, ed elogiò i contributi che l’opera di Lobacevskji aveva portato alla
geometria, raccomandando la sua elezione a membro della Società scientifica di Gottinga nel 1842.
Morì nel 1856 ed è ricordato dai posteri come il Copernico della geometria.
L’amico ungherese di Gauss, W. F. Bolyai, aveva dedicato gran parte della sua vita ai tentativi
di dimostrare il postulato delle parallele. Quando venne a sapere che il proprio figlio, Janos Bolyai
(1802-1860), si era immerso nello studio del problema delle parallele, il padre insegnante di
matematica in una città di provincia, scrisse al figlio brillante ufficiale dell’esercito: "…per amor
del cielo, ti imploro di desistere dal tentativo. Il problema delle parallele è una cosa da temere ed
evitare non meno delle passioni dei sensi, poiché anch’esso può rubarti tutto il tuo tempo e privarti
della salute, della serenità di spirito e della felicità". Janos, lungi dal desistere proseguì nelle sue
ricerche, sviluppò quella che egli chiamò "scienza assoluta dello spazio" partendo dall’ipotesi che
per un punto esterno ad una retta si possano tracciare nello stesso piano infinite parallele alla retta
data, sempre più convinto della significatività dei risultati ottenuti li comunicò al padre. È
interessante riportare uno stralcio della risposta di quest’ultimo: "…se la cosa è perfettamente
riuscita, è conveniente affrettarsi a renderla di pubblica ragione per due motivi: primo perché le
idee passano facilmente da uno all’altro, che in seguito le può pubblicare prima; in secondo luogo,
perché c’è anche qualche verità in questo fatto, che parecchie cose hanno un epoca, nella quale
esse sono trovate nello stesso tempo in più luoghi, precisamente come in primavera le violette da
ogni parte vengono alla luce...” Il padre pubblicò i risultati di Janos, in forma di appendice ad un
proprio trattato dal lungo titolo:"Tentamen juventutem….". È fondamentale osservare che benché
questo trattato rechi una licenza di stampa datata 1829, ossia l’anno stesso in cui Lobacewskji
pubblicò il suo saggio sulla Gazzetta di Kazan, l’opera fu in realtà pubblicata solo nel 1832. Il padre
di Janos chiese un parere sull’opera anche al grande Gauss, che approvò sinceramente, dopo aver
sottolineato di avere avuto le stesse idee anni prima. Gauss però, non si espresse mai
pubblicamente. Janos ci rimase male e temette soprattutto di perdere il diritto della priorità, inoltre
lo scarso merito dato al suo lavoro, e la pubblicazione dell’opera di Lobacewskji in tedesco nel
1840, misero Bolyai in uno stato di prostrazione dal quale non si riebbe più, smise definitivamente
di occuparsi dell’argomento e perse via via il suo equilibrio mentale. La parte maggiore del merito
di avere gettato le basi della geometria non-Euclidea spetta quindi a Lobacewskji.
In seguito altri grandi matematici diedero contributi fondamentali alla costruzione di sistemi
geometrici alternativi a quello euclideo. È gia stato osservato che l’unica negazione del V postulato
Pagina 20
Geometrie non euclidee
Mario Sandri
coerente con il resto del sistema euclideo è relativa all’unicità della parallela; infatti era nota la
contraddittorietà dell’ipotesi dell’ottuso, cioè l’ipotesi che nega l’esistenza della parallela. Restava
comunque in sospeso la possibilità (modificando qualcos’altro oltre al V postulato) di costruire
geometrie (non-euclidee) in cui si negasse l’esistenza della parallela; o addirittura sistemi
geometrici ancora più generali.
Un importante contributo alla chiarificazione e soluzione di questi temi venne dato da G.F.B.
Riemann (1826 - 1866). Figlio di un pastore protestante, Riemann fu allevato in condizioni molto
modeste, conservando per tutta la vita un corpo fragile e maniere timide. Riemann studiò a Berlino.
Nel 1854 divenne privatdozent a Gottinga, come consuetudine venne invitato a pronunciare un
Habilitationschirft davanti alla facoltà. Il risultato fu la più famosa dissertazione di abilitazione della
storia della matematica. Essa infatti presentava un’ampia e profonda rivisitazione dell’intera
geometria. La dissertazione dal titolo "Ueber die Hypothesen welche der geometrie zu Grundle
liegen" (Sulle ipotesi che stanno alla base della geometria) riuscì ad entusiasmare persino il grande
Gauss che espresse, forse per la prima ed ultima volta nella sua carriera, la propria ammirazione per
l’opera di un altro matematico. Le geometrie di Riemann sono non-euclidee in un senso molto più
generale di quelle di Lobacevskji e Bolyai. Secondo la concezione di Riemann la geometria non
dovrebbe neppure necessariamente trattare di rette e punti nel senso ordinario, ma di insiemi di nple di coordinate nei quali riveste un ruolo fondamentale il concetto di distanza (metrica).
L’assiomatizzazione moderna della geometria
Da quanto accennato precedentemente, è facile intuire che dopo le prime apparizioni di
geometrie non euclidee, sono stati individuati vari sistemi geometrici coerenti e, col successivo e
crescente sviluppo del metodo assiomatico, questi hanno assunto, come tutti i sistemi matematici in
generale, un aspetto sempre più chiaramente ipotetico-deduttivo, perdendo il loro tradizionale
riferimento ad oggetti geometrici esterni. Questo è il punto di vista che potremo denominare
dell’assiomatica moderna, che si caratterizza per il fatto di considerare le teorie matematiche come
sistemi ipotetico-deduttivi, in cui, ammessi certi enunciati iniziali, si ricavano le loro conseguenze
logiche senza preoccuparsi di sapere se essi sono veri o falsi. Ciò porta a vanificare il problema
dell’esistenza degli enti matematici come oggetti a cui gli assiomi delle teorie intendono riferirsi.
Anche se, necessariamente, gli assiomi contengono termini primitivi dal "sapore" intuitivogeometrico come "punto", "piano", "stare tra", etc. Il significato di questi termini non è più
referenziale (cioè non deriva dal fatto che essi denotino degli oggetti), ma deriva soltanto da
relazioni e proprietà esplicitate negli assiomi. Fu David Hilbert (Germania 1862-1943), nel suo
Pagina 21
Geometrie non euclidee
Mario Sandri
volume "Grundlagen der Geometrie" (1899 - Fondamenti della geometria), il primo matematico a
dare alla geometria un assetto puramente formale e assiomatico. Pare significativo citare le parole
con cui Hilbert apre il primo capitolo dei suoi Grundlagen:
"Consideriamo tre diversi sistemi di oggetti: chiamiamo punti gli oggetti del primo sistema e li
indichiamo con A,B,C,…; chiamiamo rette gli oggetti del secondo sistema e li indichiamo con
a,b,c,…; chiamiamo piani gli oggetti del terzo sistema e li indichiamo con α, β, γ, …” e poi: "
Consideriamo punti, rette, piani in certe relazioni reciproche e indichiamo queste relazioni con
parole come "giacere", "fra", "congruente"; la descrizione esatta e completa di queste relazioni
segue dagli assiomi. "
Hilbert formula per la sua geometria un insieme di ventuno assunzioni, noti come assiomi di
Hilbert. Di questi, otto riguardano la relazione di incidenza e comprendono il primo postulato di
Euclide; quattro concernono proprietà di ordinamento; cinque vertono sulla congruenza; tre
riguardano la relazione di continuità (assunzioni tacitamente presenti in Euclide, ma non
esplicitamente dichiarate); infine un assioma è relativo alle parallele. Dopo avere definito parallele
due rette complanari che non si incontrano, Hilbert assume l’unicità della parallela ad una retta
condotta per un punto esterno ad essa (essendo l’esistenza dimostrabile con procedimento analogo a
quello di Euclide).
Sull’esempio dell’opera pionieristica di Hilbert altri matematici hanno proposto sistemi di
assiomi alternativi o sostitutivi, di conseguenza il carattere puramente formale e assiomatico delle
geometrie, come per le altre branche della matematica, è risultato definitivamente acquisito. E’
sensato porsi il problema, di che cosa sia oggi effettivamente la geometria, poiché di fronte a
geometrie costruite prevalentemente con enti formali e astratti, riesce piuttosto arduo intravedere in
esse una qualunque struttura geometrica nel senso intuitivo del termine. Si può, nonostante le
generalizzazioni subite dal sapere geometrico, recuperarne un’unità intrinseca che permetta di
caratterizzare cosa è "geometria" all’interno delle discipline matematiche? Un ordine di idee che
permette di rispondere a questa domanda è stato formulato da Felix Klein. Nel 1872, quando
divenne professore ad Erlangen, Klein, in un celebre discorso inaugurale, delineò il mezzo
conveniente per caratterizzare le varie geometrie che stavano nascendo. Nel suo discorso che
divenne famoso come "Programma di Erlangen" Klein descrive la geometria come lo studio delle
proprietà delle figure aventi carattere invariante rispetto ad un particolare gruppo di
trasformazioni. La classificazione dei gruppi di trasformazioni diventava quindi la chiave per la
caratterizzazione delle varie geometrie.
Pagina 22
Geometrie non euclidee
Mario Sandri
Modelli per la geometria di Lobacewskij
Lobacewskij scrive nella introduzione ai "Nuovi principi della geometria":
"I vani sforzi compiuti dai tempi di Euclide, per il corso di duemila anni, mi spinsero a sospettare
che nei concetti stessi della geometria non si racchiuda ancora quella verità che si voleva
dimostrare, e che può essere controllata, in modo simile alle altre leggi della fisica, soltanto da
esperienze, quali, ad esempio, le osservazioni astronomiche."
Egli concepisce l’idea che lo spazio fisico reale possa avere alcune caratteristiche diverse da
quello euclideo e, in seguito a ciò, ritiene che la geometria debba essere fondata non più su enti
ideali (punto, retta, piano), bensì su oggetti geometrici più tangibili e più vicini alla nostra
esperienza sensoriale (per esempio i corpi solidi). Questa fisicità porta a considerare vere solo le
affermazioni che possono essere verificate sperimentalmente. In questa ottica Lobacewskij nega,
nel V Postulato di Euclide, l’unicità della retta parallela ad una retta data, con le seguenti
considerazioni:
Preso un foglio su cui disegnare, dalle dimensioni qualsiasi, se r è una retta e P un punto esterno
ad essa, si conduca per P la perpendicolare PH alla retta r e, sempre per P, una retta a che forma
con PH un angolo che differisce da un angolo retto per "pochissimo". La retta a non incontrerà la
retta r sul foglio di lavoro e potrebbe non incontrarla ad una distanza "ragionevolmente vicina";
potrebbe incontrarla invece ad una distanza al di fuori della nostra percezione, o, proprio per
questo, non incontrarla affatto.
Se accettiamo questa ipotesi, per P passano delle rette (secanti) che incontrano la retta r e rette
(non secanti) che non la incontrano; le retta a e a’ che separano in ciascun semipiano le rette
secanti dalle non secanti vengono chiamate rette per il punto P e parallele alla retta r.
Pagina 23
Geometrie non euclidee
Mario Sandri
Lobacewskij allora ritiene validi i primi quattro postulati di Euclide e sostituisce il quinto con il
seguente:
per un punto passano due rette parallele ad una retta data
L’accettazione dell’assioma delle due parallele comporta notevoli conseguenze, fra le quali:
•
nessun quadrilatero è un rettangolo
•
non esistono triangoli simili, ad eccezione di quando essi sono anche congruenti
•
per un triangolo qualsiasi la somma degli angoli interni di un triangolo è sempre minore di
un angolo piatto
Ci sono alcuni validi modelli che descrivono la geometria di Lobacewskij: i modelli di Klein, di
Poincaré e di Beltrami. Iniziamo da quello di Klein: esso è costruito pensando
•
ai punti come i punti interni ad una conica (per esempio una circonferenza)
•
alle rette come le congiungenti due punti interni alla conica
•
al piano formato dai punti interni alla conica
Si può facilmente verificare che sono rispettati in questo modello sia gli assiomi di incidenza,
sia quelli di ordinamento, sia quelli di continuità.È invece meno semplice verificare gli assiomi
della congruenza, perchè per parlare di congruenza è indispensabile parlare di distanza tra punti e
tutto è complicato dal fatto di non poter parlare di segmenti la cui lunghezza supera quella del
diametro della circonferenza che abbiamo preso in esame. In tale modello non è verificato l’assioma
delle parallele: si consideri, infatti la "retta" AB e il punto C esterno ad essa; si può verificare
Pagina 24
Geometrie non euclidee
Mario Sandri
immediatamente che vi sono infinite "rette" che non intersecano la retta data e tali "rette" sono
separate da quelle che invece incontrano la "retta" AB da due particolari "rette" che vengono
definite parallele ad AB passanti per C.
In altro modello della Geometria di Lobacewskij è quello di Poincaré. Il modello di Poincaré è
costruito pensando:
•
i punti come i punti interni ad una circonferenza C
•
le rette sono gli archi di circonferenza perpendicolari nei loro estremi alla circonferenza C
(nei punti di intersezione le tangenti alle due circonferenze, la C e quella cui appartiene
l’arco, hanno tangenti fra loro perpendicolari)
•
il piano formato dai punti interni alla circonferenza
Come si può osservare in questa situazione le proprietà delle "nuove rette" differiscono da quelle
della geometria euclidea e in particolare non vale più il postulato delle parallele. Questi nuovi enti si
comportano esattamente come quelli del modello di Klein, ma con questa sottile distinzione: nel
Pagina 25
Geometrie non euclidee
Mario Sandri
modello di Klein le rette non sono le rette euclidee, nel modello di Poincaré le rette non sono le rette
euclidee, ma sono archi di circonferenza euclidei e quindi, sotto questo aspetto, in questo modello si
può applicare la geometria euclidea2.
Il terzo modello è quello di Beltrami, che risulta essere particolarmente importante perchè è stato il
primo modello proposto per le geometrie non euclidee ed ha avuto il pregio di convincere gli
studiosi della validità di tali studi. La curva fondamentale è la trattrice, definita come il luogo dei
punti del piano tali che i segmenti di tangente compresi tra essa e una retta hanno lunghezza
costante; tale retta risulta essere asintoto per la curva.
Si consideri adesso la superficie ottenuta ruotando la curva così costruita attorno al suo asintoto (si
ottiene la pseudosfera).
2
Occorre qui fare una breve considerazione: il matematico, nei suoi studi, è libero di utilizzare gli enti fondamentali e
un insieme qualsiasi di assiomi, purchè coerenti e compatibili al loro interno, ma il suo lavoro potrà essere utilizzato dal
fisico solo se il suo sistema complessivo ha un riscontro nelle situazioni fisiche in cui vengono a trovarsi degli oggetti
nel mondo reale (si ricordi l’esigenza, espressa dalle ricerche di Lobacewskij, di poter lavorare con concetti concreti). A
questo proposito si consideri la proposizione: "la luce si propaga in linea retta" e si pensi di considerare questa come la
definizione fisica di retta; su questa base poggia il modello di Poincarè: infatti si può dimostrare che se la velocità della
luce è in ogni punto interno alla circonferenza uguale alla distanza di quel punto dalla circonferenza i raggi di luce
prendono proprio la forma di quegli archi che nel modello vengono chiamati "rette".
Pagina 26
Geometrie non euclidee
Mario Sandri
I punti sono i punti che stanno sulla superficie della pseudosfera e per retta passante per due punti si
intende la geodetica, cioè la linea di minima distanza congiungente i due punti; si può ben osservare
che per un punto esterno ad una retta passano più rette che non la incontrano.
Il modello della geometria di Riemann
Nella geometria euclidea, così come in quella di Lobacewskij si implica, seppur tacitamente,
che la retta è infinita, ma con Riemann si apre una nuova via di intendere i concetti fondamentali.
Egli infatti fu il primo a introdurre una distinzione tra illimitatezza e infinità; tale distinzione gli
derivava dal considerare in geometria sia le proprietà di "estensione" sia le proprietà "metriche" e
affermava che l’illimitatezza dello spazio possiede una maggiore certezza empirica di ogni altra
esperienza esterna, ma che da questo non consegue necessariamente l’infinità, anzi basterebbe che
lo spazio avesse una curvatura costante positiva, seppur minima, ed esso sarebbe certamente finito.
Riemann abbandona quindi la tradizionale concezione euclidea dello spazio inteso soprattutto in
senso sintetico (strettamente geometrico) e lo integra con visione più analitica ( più rivolta verso il
calcolo). Nella teoria di Riemann è di fondamentale importanza il concetto di varietà ndimensionale, che porta ad una generalizzazione del piano e dello spazio cartesiano. Per meglio
spiegare la sua teoria Riemann utilizza come modello una superficie curva, da cui nasce l’esigenza
Pagina 27
Geometrie non euclidee
Mario Sandri
di introdurre un valore di curvatura dello spazio. Secondo tale valore si possono distinguere tre
varietà a curvatura costante3:
•
varietà a curvatura negativa (geometria di Lobacewskij o iperbolica)
•
varietà a curvatura nulla (geometria di Euclide)
•
varietà a curvatura positiva (geometria di Riemann o ellittica)
L’ultimo caso è quello di cui si occupa Riemann ed è fondato essenzialmente sull’ipotesi che la
retta sia chiusa e finita. Il modello che Riemann propone è il seguente:
•
Il piano è costituito da una superficie chiusa ( per comodità potremmo pensare ad una
superficie sferica)
•
I punti sono i punti su di essa
•
Le rette per due punti sono i cerchi massimi passanti per essi
É evidente che in questo modello non esistono rette parallele.
3
La curvatura è uno dei caratteri che contraddistinguono una curva. Si ha immediatamente l’intuizione che la curvatura
di una curva in ognuno dei suoi punti può essere più o meno accentuata; la curvatura si definisce mediante la
circonferenza che meglio approssima la curva e così è facile comprendere che a una curvatura forte corrisponde un
raggio "piccolo" e a una curvatura debole un raggio "grande". Quando il raggio diventa infinitamente grande la
curvatura tende ad annullarsi e la linea a diventare una retta (la retta viene quindi considerata una curva a curvatura
nulla )
Pagina 28
Geometrie non euclidee
Mario Sandri
In tale contesto Riemann definisce la linea di minima distanza tra due punti la geodetica, cioè l’arco
minore di circonferenza che passa per i due punti ed ha il centro nel centro della sfera. A volte, per
semplificare il modello si preferisce considerare una semisfera, per evitare il caso di punti
diametralmente opposti sulla sfera. Anche in un tale contesto, oltre a non avere rette parallele, si
può dimostrare che:
•
la somma degli angoli interni di un triangolo è sempre maggiore di una angolo piatto
•
non esistono triangoli simili, salvo quando sono anche congruenti
•
tutte le perpendicolari ad una "retta" passano per una medesima coppia di punti, che sono
diametralmente opposti.
Come si può ben capire dalla figura precedente non è più valida l’unicità della retta perpendicolare
ad una retta data e passante per un punto (la "retta" che passa per A e per B ha come perpendicolari
sia la retta AC che la retta BC, entrambe passanti per C). Inoltre, pensando di aumentare la
lunghezza dell’arco AB e mantenendo fisso il vertice C, si possono ottenere triangoli in cui la
somma degli angoli interni può arrivare fino a 540°.
Pagina 29
Geometrie non euclidee
Mario Sandri
LA GEOMETRA SULLA SFERA
La somma degli angoli di un triangolo
Anche un ragazzino sa che la somma degli angoli di un triangolo, di qualsiasi triangolo, è di
180°. Perchè è così? Potremo fare delle verifiche sperimentali, ritagliando gli angoli di alcuni
triangoli: verificheremo, con una certa approssimazione, che una volta
"messi insieme" formano sempre un angolo piatto. Ma una proprietà
così importante meriterebbe una maggiore riflessione. Questa proprietà
euclidea dei triangoli, all'apparenza così innocua, nasconde infatti una
delle questioni più profonde della matematica. Una questione che ha
impegnato i matematici per due millenni. Allora, perchè la somma
degli angoli di un triangolo è di 180°? Per rispondere dobbiamo occuparci di alcune questioni
cruciali concernenti le rette parallele4.
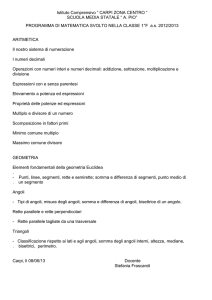
Rette parallele. I postulati di Euclide
In figura 1 la retta r è fissa mentre la retta s può ruotare in senso antiorario attorno al punto P.
Indichiamo con Q il punto in cui r ed s si incontrano.
Man mano che s ruota si vede che il punto Q si allontana verso est sulla retta r (fig. 2).
4
Gauss era così poco convinto che la somma degli angoli di un triangolo fosse realmente di 180° che nel 1820, quando
fu incaricato di eseguire rilevamenti cartografici dallo stato di Hannover, ebbe cura di eseguire delle misurazioni su
grandi triangoli i cui vertici si trovavano sulle cime di montagne (visibili nonostante la curvatura della terra). Il più
grande di questi triangoli aveva come vertici le cime dei monti Hohenhagen, Brocken e Inselberg, e il lato maggiore
misurava 107 km. Progettò egli stesso un raffinato strumento ottico in grado di riflettere un raggio luminoso in una
sola direzione. Ma gli esperimenti non mostrarono alcun apprezzabile scostamento dalla previsione euclidea: lo somma
degli angoli risultò di 180°, nei limiti dell'accuratezza degli strumenti. Ma non è irrilevante che Gauss nutrisse questo
dubbio; in realtà Gauss dubitava, come vedremo, del carattere euclideo dello spazio.
Pagina 30
Geometrie non euclidee
Mario Sandri
Il punto Q si muove con continuità su r: piccole rotazioni di s determinano piccoli spostamenti di Q
(e viceversa). Q assume via via tutte le posizioni possibili su r, "passa" per tutti i punti di r. Il
punto Q dunque si allontana sempre più sulla retta r. Si intuisce però che esiste una (e una sola)
situazione in cui sembra proprio che le due rette non si intersechino e quindi Q non esista. In questa
situazione le due rette si dicono parallele (fig. 3).
Continuando a ruotare s ci accorgiamo che il punto Q ricompare su r, questa volta però Q è a ovest.
Eccoci arrivati a un punto cruciale. Nella geometria euclidea si assume, assecondando l'intuizione,
che per un punto P non appartenente alla retta r passi una e una sola retta s parallela a r (tale cioè
che r e s non si incontrino). Tale assunzione non è altro che il quinto postulato di Euclide.
Qui di seguito sono elencati i postulati su cui Euclide (300 avanti Cristo) fondò, negli Elementi,
il castello della sua geometria:
(P1) Da ogni punto a ogni altro punto è possibile condurre una linea retta;
Euclide non postula esplicitamente che per due punti passi un'unica retta, ma assume
tacitamente che sia così.
(P2) Un segmento di linea retta può essere indefinitamente prolungato in linea retta;
(P3) Attorno ad un centro scelto a piacere è possibile tracciare una circonferenza con
raggio scelto a piacere;
(P4) Tutti gli angoli retti sono uguali;
Euclide ha già dato la definizione di angolo retto: se una retta r innalzata da un'altra
retta s forma con essa angoli adiacenti uguali fra loro, ciascuno dei due angoli è retto. Il
postulato P4 è necessario per garantire che gli angoli ottenuti con un'altra costruzione di
Pagina 31
Geometrie non euclidee
Mario Sandri
questo tipo, relativa alle rette r' e s', sono uguali ai precedenti. Il postulato P4 dimostra
una notevole raffinatezza logica da parte di Euclide e afferma in sostanza che il piano è
uniforme (nel senso che la costruzione predetta fornisce sempre gli stessi angoli, in
qualsiasi parte del piano venga eseguita).
(P5) In un piano, per un punto fuori di una retta si può condurre una e una sola parallela
a una retta data (due rette si diranno, con Euclide, parallele, quando non si
incontrano).
In realtà Euclide formulò il quinto postulato in una forma diversa da quella qui riportata
ma ad essa del tutto equivalente.
Il quinto postulato
Per secoli i matematici hanno ritenuto che il quinto postulato dovesse essere una conseguenza
dei primi quattro e si sono adoperati, inutilmente, per dimostrarlo5. Bisogna aspettare la prima metà
del 1800 perchè la questione venga affrontata in modo radicalmente diverso da Lobacevskij (russo)
e Bolyai (ungherese); i due matematici si convinsero infatti, l'uno indipendentemente dall'altro, che
il quinto postulato non fosse una conseguenza dei precedenti e lo sostituirono con un'ipotesi
alternativa:
(P5') per un punto che giace al di fuori di una retta si possono tracciare più rette (almeno
due) che non incontrino la retta data.
Svilupparono così uno dei due possibili rami della geometria non euclidea: la geometria non
euclidea iperbolica. Lobacevskij pubblicò il suo lavoro nel 1829 e Bolyai nel 1832. Prima di loro,
tuttavia, anche il grande Gauss (1777-1855) era arrivato a conclusioni e risultati simili senza
tuttavia pubblicarli. Si osservi che il quinto postulato può essere negato anche in un altro modo:
5
Tanta ostinazione da parte degli studiosi di geometria nel cercare di dimostrare il postulato delle parallele - a
cominciare da Proclo (IV secolo a.C.) fino a Saccheri (1667-1733) e Lambert (1728-1777) - non risiedeva nel fatto che
essi dubitassero della sua verità (nessuno dubitava che la geometria euclidea fosse l'unica geometria possibile) ma nel
carattere essenzialmente diverso che il quinto postulato aveva rispetto agli altri. I primi quattro postulati sembravano
godere di una maggiore evidenza; nel quinto postulato entrava infatti in gioco una proprietà che non è verificabile in
una regione finita di piano (dire che due rette sono parallele equivale a dire che non si incontrano per quanto possano
essere prolungate). Per di più Euclide aveva introdotto molto tardi, negli Elementi, il quinto postulato dimostrando
prima ben 28 teoremi; ciò faceva ritenere che lo stesso Euclide nutrisse qualche dubbio sul fatto che tale asserzione non
potesse discendere dai primi quattro postulati. Questo enorme sforzo di studio e di ricerca, per quanto in alcuni casi si
avvalesse di sottili argomentazioni logiche, non portò che a una serie di dimostrazioni sbagliate; nessuno, prima di
Gauss, Lobacevskij e Bolyai, accettò l'idea che il problema così come era posto non poteva essere risolto (cioè nessuno
accettò l'idea che il postulato delle parallele fosse logicamente indipendente dai primi quattro) e che quindi si fosse
autorizzati, sul piano logico, a sostituire il quinto postulato con un'assunzione alternativa sviluppando così una nuova
geometria.
Pagina 32
Geometrie non euclidee
Mario Sandri
(P5") tutte le rette passanti per un punto che giace al di fuori di una retta data incontrano
tale retta (quindi due rette si intersecano sempre).
Si arriva così all'altro possibile ramo della geometria non euclidea: la geometria ellittica sviluppata
da Riemann (dissertazione presso l'università di Gottinga del 1854).
Mentre per la geometria ellittica fu lo stesso Riemann a fornire un modello6, il primo modello di
geometria iperbolica fu dato nel 1868 dal matematico italiano Eugenio Beltrami (1835-1900). Un
secondo importante modello per la geometria iperbolica è quello di Henri Poincaré (1854-1912)7.
6
Un modello di un sistema assiomatico è un insieme "concreto" di oggetti geometrici che verifichino gli assiomi del
sistema. Un modello per la geometria ellittica è la geometria sulla sfera di cui ci occuperemo. In questo modello
interpreteremo come piano la superficie della sfera, come punto un punto della superficie sferica e come retta una
circonferenza massima. Lavoreremo a lungo su questo modello: il nostro principale obiettivo didattico è darne una
giustificazione sul piano intuitivo (in particolare rendere "ragionevole" l'idea che le circonferenze massime, che a noi
appaiono come linee curve, debbano invece considerasi nel modello come linee rette).
7
A proposito dello sviluppo della geometria non euclidea si è parlato, giustamente, di "rivoluzione copernicana" nel
pensiero matematico; ecco cosa scrive Lucio Lombardo Radice: Ciò che colpisce in Lobacevskij (e in Bolyai, che poco
dopo Lobacevskij raggiunse risultati equivalenti) è il fatto che, dal punto di vista matematico, la lettura delle loro opere
non richiede conoscenze che vadano al di là di quelle "euclidee". E ciò che colpisce forse ancora di più è il fatto che
alcuni dei principali teoremi della nuova "geometria generale" siano antecedenti alla sua fondazione: si trovino
nell'opera, ad esempio, di Gerolamo Saccheri, "euclideo" convinto, un secolo prima che non nei Principi della
geometria di Lobacevskij o nel Tentamen di Bolyai, che non nelle opere cioè dei fondatori della nuova geometria. Il
paragone che viene alla mente (e che da altri è stato già fatto) è piuttosto quello con la rivoluzione copernicana. Nella
rivoluzione non-euclidea come in quella copernicana il fatto nuovo non consiste tanto e soltanto nell'apporto di nuovo
materiale, di nuove scoperte, quanto in un capovolgimento del "punto di vista".
Pagina 33
Geometrie non euclidee
Mario Sandri
Rette parallele tagliate da una trasversale
Consideriamo due rette r, s parallele e una terza retta t che le tagli. Si intuisce che gli angoli
evidenziati in figura 1 (angoli corrispondenti) devono essere uguali: la retta t ha infatti la stessa
inclinazione rispetto alle rette r ed s che sono parallele.
Da questa osservazione e dall'uguaglianza di angoli opposti segue l'uguaglianza dei quattro angoli
acuti che si formano (fig. 2).
Analogamente si ragiona per i quattro angoli ottusi che sono tutti uguali.
Pagina 34
Geometrie non euclidee
Mario Sandri
Quindi:
Due rette parallele tagliate da una trasversale formano 4 angoli acuti uguali e 4 angoli ottusi
uguali (oppure formano 8 angoli retti).
Ora attenzione: questa proprietà delle rette parallele, che come si è visto ha una sua evidenza
intuitiva, può essere dimostrata, sul piano logico, solo se si assume il quinto postulato di Euclide. E'
importante osservare che assumendo solo i primi quattro postulati di Euclide più le seguenti due
proposizioni (che Euclide utilizzò senza dichiararle esplicitamente tra i postulati)
(A1) Una linea retta divide il piano in due semipiani
(A2) Due punti distinti individuano un'unica retta
è possibile dimostrare che esistono nel piano rette parallele (cioè rette che non hanno alcun punto in
comune). In particolare si può dimostrare che per un punto P non appartenente a una retta r passa
una parallela a r. Non è tuttavia possibile dimostrare l'unicità di tale parallela (di qui la necessità del
quinto postulato). Non è neanche possibile dimostrare la sopra citata proprietà di rette parallele
tagliate da una trasversale8. L’immagine seguente illustra il significato dell'assioma A1: se i punti A
e B non sono nello stesso semipiano allora il segmento AB interseca necessariamente la retta r.
8
Come vedremo esistono due possibili geometrie ellittiche: quella singola e quella doppia. La geometria sulla sfera
costituisce un modello di geometria ellittica doppia. Qui vedremo che è verificato l'assioma A1 ma non l'assioma A2.
L'altra geometria ellittica, che pure studieremo, è quella del piano proiettivo (ed è una geometria ellittica singola). Qui è
verificato l'assioma A2 ma non l'assioma A1. Il discrimine tra le due geometrie ellittiche è dunque dato dal verificarsi
dell'assioma A1 oppure dell'assioma A2 (mentre deve essere chiaro che in una geometria ellittica, singola o doppia, non
possono essere entrambi verificati perchè da essi e da un'opportuna modificazione dell'assioma P2 discende l'esistenza
di rette parallele che è chiaramente incompatibile con l'assioma P5"). In geometria iperbolica sono invece verificati gli
assiomi P1 - P4 e gli assiomi A1 e A2.
Pagina 35
Geometrie non euclidee
Mario Sandri
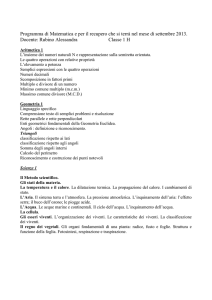
Somma degli angoli di un triangolo
Si consideri un triangolo ABC di base BC. Tracciate la retta r parallela alla base e passante per
A. I due angoli rossi e i due angoli blu sono evidentemente uguali dato che i lati AB e AC tagliano
rette parallele. Ne segue che la somma dei tre angoli del triangolo è uguale a un angolo piatto.
Ci si è allora resi conto come l'invarianza della somma degli angoli interni di un triangolo discenda
da una proprietà delle rette parallele che si fonda sul quinto postulato di Euclide. Ma c'è di più: si
potrebbe dimostrare che tale proprietà angolare dei triangoli è perfettamente equivalente al quinto
postulato.
Punti all'infinito
Si è visto che la retta s ruotando attorno a P incontra via via tutti i punti di r. Il punto Q si
muove con continuità su r, si allontana sempre più a est e poi ricompare a ovest.
C'è una sola posizione di s, abbiamo detto, alla quale non corrisponde alcun punto Q su r. Ciò è in
accordo con la nostra intuizione di rette parallele (e ciò viene assunto col quinto postulato). Ma, a
una riflessione più attenta, ci accorgiamo che forse c'è qualcosa che può non convincere. Come è
strano il comportamento del punto Q! Si muove con continuità su r allontanandosi all'infinito verso
est e poi, bruscamente, ricompare "infinitamente" lontano a ovest riprendendo il suo movimento
continuo su r. Sarebbe bello immaginare che esista un punto all'infinito comune alle rette r ed s,
Pagina 36
Geometrie non euclidee
Mario Sandri
chiamiamolo Q*, che consenta a Q di evitare questo "salto", questa discontinuità. Q* dovrebbe
trovarsi infinitamente lontano a est e, nello stesso tempo, infinitamente lontano a ovest.
Se così fosse cambierebbero molte cose: due rette si incontrerebbero sempre, non esisterebbero rette
parallele. Inoltre le rette si comporterebbero in realtà come delle curve (e per di più come delle
curve chiuse).
Tutte le rette tra loro parallele avrebbero in comune uno stesso punto all'infinito e rette con diversa
direzione individuerebbero diversi punti all'infinito. Dovremmo dire allora che il piano con i suoi
punti all'infinito è diventato "curvo" e "chiuso"?
Pagina 37
Geometrie non euclidee
Mario Sandri
La geometria sulla sfera
Immaginiamo che il nostro ambiente geometrico non sia più il piano euclideo ma la superficie
di una sfera. Il piano e la superficie di una sfera sono entrambi
ambienti geometrici bidimensionali (diremo anche: spazi a due
dimensioni). Useremo due simboli: E2 per il piano euclideo, S2 per
la superficie di una sfera (il 2 che compare a destra delle lettere sta
a ricordarci che si tratta di ambienti che hanno dimensione 2). Il
concetto di dimensione di un oggetto geometrico ha un suo
fondamento intuitivo: un punto ha dimensione 0, tutte le linee
hanno dimensione 1, tutte le superfici hanno dimensione 2, tutte le
figure solide hanno dimensione 3. Se tuttavia si vuole approfondire
tale concetto si può ricorrere ai sistemi di coordinate. Sia nel caso di E2 che nel caso di S2 abbiamo
bisogno di due parametri continui (cioè di due coordinate) per individuare un punto P.
Nel caso di E2 si tratta delle normali coordinate cartesiane (ascissa e ordinata), nel caso di S2 si
tratta delle coordinate geografiche (longitudine e latitudine, che sono misure angolari). E'
importante osservare che la corrispondenza tra punti e coordinate, oltre ad essere biunivoca, è, in
entrambi i casi, bicontinua: se variamo di poco la posizione di P, cambieranno di poco le sue
coordinate (e viceversa).
Pagina 38
Geometrie non euclidee
Mario Sandri
Una sfera è naturalmente un oggetto tridimensionale che noi possiamo concepire solo se immerso
nello spazio tridimensionale; ma la superficie di una sfera è bidimensionale. Degli esseri
bidimensionali (pensate agli abitanti di Flatlandia9, portati però sulla superficie di una sfera)
potrebbero benissimo studiare la geometria di questo "mondo" bidimensionale. Inutile dire che un
essere bidimensionale percepirebbe la superficie della sfera, cioè il suo mondo, in modo ben diverso
da come lo percepiamo noi. Il punto di vista di un essere bidimensionale, nello studio della
geometria della sfera, lo chiameremo intrinseco. La cosa è tutt'altro che banale, un essere
bidimensionale non ha la minima idea di cosa sia lo spazio tridimensionale così come noi non
abbiamo la più pallida intuizione di cosa sia un spazio a quattro dimensioni. Chiameremo invece
estrinseco il nostro punto di vista tridimensionale che ci consente di contemplare la superficie di
una sfera immersa nello spazio. Gli enti geometrici su cui si basa la geometria nel piano euclideo
sono punti e rette; quali sono gli enti corrispondenti sulla superficie di una sfera? Ai punti del piano
corrispondono naturalmente i punti di S2. Ma cosa dobbiamo intendere per "linea retta" sulla
superficie di una sfera?
9
Il riferimento è al libro fantastico Flatland (1884) di E. A. Abbot. Flatlandia è un mondo planare abitato da creature
bidimensionali: possiamo immaginarle come sottili monete sulla superficie di un tavolo o come macchie di inchiostro
su un foglio di carta. Gli abitanti di Flatlandia sono in realtà della figure geometriche; ecco come il Quadrato,
protagonista del racconto, presenta il suo mondo:
Immaginate un vasto foglio di carta su cui delle Linee Rette, dei Triangoli, dei Quadrati, dei
Pentagoni, degli Esagoni e altre figure geometriche, invece di restar ferme al loro posto, si
muovano qua e là, liberamente, sulla superficie o dentro di essa, ma senza potersene sollevare e
senza potervisi immergere, come delle ombre, insomma, consistenti, però, e dai contorni luminosi.
Così facendo avrete un'idea abbastanza corretta del mio paese e dei miei compatrioti. Ahimè,
ancora qualche anno fa avrei detto: "del mio universo", ma ora la mia mente si è aperta a una più
alta visione delle cose.
Pagina 39
Geometrie non euclidee
Mario Sandri
Circonferenze massime
È opportuno fare alcune osservazioni (estrinseche) sulla geometria della sfera10. Ogni piano che
tagli una sfera determina per sezione un cerchio11; i cerchi sezione hanno naturalmente raggi
diversi: si va da una situazione limite di raggio nullo (il cerchio sezione degenera in un punto, il
piano è tangente) alla situazione in cui il raggio è massimo ed è uguale al raggio della sfera. In
quest'ultimo caso il piano che sega la sfera passa per il centro della sfera: diremo che la sezione è un
cerchio massimo e sulla superficie sferica viene individuata una circonferenza massima.
10
Ricordiamo le definizioni di sfera e superficie sferica. Indichiamo con P un punto dello spazio e con
r un numero reale positivo (raggio). Chiameremo sfera l'insieme dei punti dello spazio ordinario
(euclideo) che hanno distanza minore o uguale a r da P; chiameremo superficie sferica l'insieme dei
punti che hanno distanza uguale a r da P. La sfera è un oggetto tridimensionale mentre la superficie
sferica è un oggetto bidimensionale costruito nello spazio tridimensionale.
11
Riempiendo gradualmente un recipiente sferico (di vetro o plastica trasparente) con del liquido
colorato si possono visualizzare le sezioni di una sfera. Si capisce che comunque sia disposto il piano
secante rispetto alla sfera otterremo sempre per sezione dei cerchi (a causa della simmetria della
sfera).
Pagina 40
Geometrie non euclidee
Mario Sandri
Dobbiamo ora esaminare due semplici ma importanti proprietà delle circonferenze massime. Ci
serve prima una definizione: due punti P, P' sulla superficie di una sfera
si dicono antipodali (o opposti) se sono allineati con il centro O della
sfera (anche questa è una definizione estrinseca). Ecco le due proprietà.
(1) Per ogni punto P sulla superficie di una sfera passano infinite
circonferenze massime.
(2) Sulla superficie di una sfera, per ogni coppia P, Q di punti
non antipodali passa una e una sola circonferenza massima.
Le due proprietà si dimostrano facilmente12. Per la prima osserveremo che per un punto P e il centro
O passano infiniti piani (possono ruotare liberamente attorno all'asse PO): ciascuno di essi,
passando per il centro O, stacca sulla superficie della sfera una circonferenza massima.
Per la seconda osserveremo che per tre punti non allineati P, Q ed O passa uno e un solo piano13
che, contenendo O, individua sulla superficie della sfera un'unica circonferenza massima (P, Q ed
O non sono allineati perchè, per ipotesi, P e Q non sono antipodali).
12
Le dimostrazioni che seguono si fondano sulle proprietà dell'ordinario spazio euclideo (ad esempio: per tre punti
passa uno e un solo piano; se due piani hanno un punto in comune allora hanno una retta in comune). Non ci interessa
qui di introdurre l'assiomatica (euclidea) per la geometria dello spazio ordinario. Si rifletta però sul fatto che la
costruzione del nostro modello di geometria non euclidea (la geometria sulla sfera) e lo studio delle sue proprietà si
basano sulla geometria euclidea dello spazio ordinario. Utilizziamo la geometria euclidea per costruire un modello non
euclideo.
13
Per illustrare concretamente questa proprietà dei piani dello spazio euclideo possiamo ricorrere all'esempio di una
porta: se è fissata per due punti - i due cardini - è libera di ruotare, se fissiamo un ulteriore punto - il punto di serratura la porta rimane bloccata.
Pagina 41
Geometrie non euclidee
Mario Sandri
Ora attenzione, siamo arrivati a un punto cruciale: la proprietà (2) delle circonferenze massime ci
fornisce un "indizio" molto forte su ciò che potrebbero essere, sulla superficie di una sfera, le linee
"rette". Ragioneremo per analogia. Nel piano euclideo una retta è individuata in modo univoco da
due punti ed è l'unica linea a godere di questa proprietà (ad esempio per individuare una
circonferenza ci vogliono tre punti).
Analogamente sulla superficie di una sfera una circonferenza massima è individuata in modo
univoco da due punti (purché non siano antipodali). Possiamo allora assumere che le linee "rette"
sulla superficie di una sfera siano le circonferenze massime? Cerchiamo conferme di questa ipotesi.
Pagina 42
Geometrie non euclidee
Mario Sandri
I percorsi più brevi
Tutti sanno che il percorso più breve che collega due punti A e B nel piano euclideo è un
segmento di linea retta. Le rette sono dunque caratterizzate da una proprietà di "minimo":
(1) Comunque presi due punti A, B su una retta r, il segmento AB di r è il percorso più
breve tra A e B.
La proprietà (1) può essere efficacemente illustrata in questo modo. Se mettiamo in tensione un
elastico tra due chiodini, vediamo che l'elastico si dispone sul percorso minimo cioè su un segmento
di linea retta. Se proviamo a spostare l'elastico e poi lo lasciamo andare, ci accorgiamo che dopo
qualche oscillazione riassume lo stato di minima tensione.
Riflettiamo sulle seguenti condizioni di minimo:
energia potenziale elastica minima = tensione minima = lunghezza
minima dell'elastico (tenendo conto dei vincoli) = percorso più
breve tra A e B = disposizione su un segmento
Come spesso accade una questione energetica è strettamente legata a un fatto geometrico. Passiamo
ora a considerare la superficie di una sfera. La nostra ipotesi è che le circonferenze massime
abbiano lo stesso ruolo delle rette nel piano. Dovremmo allora verificare che esse ci forniscono il
percorso più breve tra due punti di S2. Procediamo sperimentalmente: prendiamo un pallone,
tracciamo su di esso una circonferenza massima e fissiamo un elastico (con del nastro adesivo) in
modo che sia in leggera tensione tra due punti A e B di tale circonferenza. Vedremo che l'elastico si
dispone esattamente su un arco della circonferenza massima; e se proveremo ad allontanarlo da tale
posizione, facendolo rimanere sulla superficie sferica, vedremo che, una volta lasciato libero, si
ridisporrà sulla circonferenza massima.
Pagina 43
Geometrie non euclidee
Mario Sandri
Possiamo allora concludere che l'arco minore AB di circonferenza massima è il percorso più breve,
sulla superficie sferica, tra i punti A, B. Sono qui necessarie due osservazioni:
(a) Dobbiamo precisare che si tratta dell'arco minore, infatti i due punti A e B, che supponiamo
non essere antipodali, staccano sulla circonferenza massima due archi, uno maggiore e
l'altro minore: l'arco che a noi interessa è chiaramente l'arco minore.
(b) Se i punti A e B fossero antipodali avremmo infiniti percorsi minimi (tutte le
semicirconferenze massime per A e B); qui compare una differenza con le rette euclidee. Se
tuttavia ci limitiamo a considerare punti non antipodali il problema non si pone (il percorso
minimo è unico ed è l'arco minore dell'unica circonferenza massima per A e B).
Una volta determinato il percorso minimo tra due punti sulla superficie sferica abbiamo anche
introdotto una nozione intrinseca di distanza tra due punti: è la lunghezza dell'arco minore di
circonferenza massima che collega A con B (se i due punti fossero antipodali assumeremo come
loro distanza la lunghezza di una semicirconferenza massima).
I punti A e B della figura 5, ad esempio, hanno, sulla superficie della sfera, una distanza pari a un
quarto di circonferenza massima. Se assumiamo che la nostra sfera abbia raggio unitario allora ogni
Pagina 44
Geometrie non euclidee
Mario Sandri
circonferenza massima ha lunghezza 2π e la distanza intrinseca di A da B è π/2. Nello spazio
ordinario misureremmo la distanza di A da B tenendo conto della terza dimensione e quindi la
distanza (estrinseca) di A da B sarebbe
2 . Per noi che vogliamo studiare la geometria su S2, cioè
la geometria intrinseca di S2, distanza significa naturalmente distanza intrinseca.
Ci siamo dunque resi conto che le circonferenze massime sono caratterizzate dalla seguente
proprietà:
(2) Comunque presi due punti non antipodali A, B su una circonferenza massima γ, l'arco
minore AB di γ è il percorso più breve tra A e B.
L'analogia tra le proposizioni (1) e (2) è molto forte. Le linee rette del piano euclideo sono
caratterizzate come "linee più brevi" così come lo sono le circonferenze massime di S2. L'unica
differenza, come si è detto, consiste nella non unicità del percorso minimo quando si considerano,
su S2, punti antipodali. Ma il caso dei punti antipodali può essere considerato come un caso
eccezionale; se considerassimo su S2 solamente punti "abbastanza vicini" il problema non si
porrebbe14.
14
Che i punti antipodali costituiscano una situazione eccezionale lo possiamo capire anche riflettendo sul fatto che la
distanza tra due punti qualsiasi A e B di S2, assumendo una sfera unitaria, è sempre minore o uguale a π
Distanza(A, B) ≤ π
La distanza è uguale a π solo se i punti sono antipodali. I punti antipodali sono i punti più lontani possibile.
Pagina 45
Geometrie non euclidee
Mario Sandri
Il concetto unificante di linea geodetica
Consideriamo una qualsiasi superficie (la superficie di un cilindro, di una sfera, di un cono, di
un toro o anche un piano). Indichiamo con la lettera Σ tale superficie. Come potremmo definire su Σ
delle linee che equivalgano alle linee rette del piano euclideo? Ecco la definizione che ci serve:
(1) Diremo che una linea γ tracciata sulla superficie Σ è una linea geodetica se ogni arco
non troppo lungo di γ, i cui estremi siano i punti A e B, è il percorso più breve da A a B
tra tutti quelli tracciabili su Σ15.
Ci si rende subito conto che le linee geodetiche del piano euclideo sono le rette; ci si rende anche
conto che le circonferenze massime sono le geodetiche sulla superficie di una sfera (tenendo
presente che, sulla sfera, archi non troppo lunghi di geodetiche sono necessariamente archi minori).
In figura 1, ad esempio, vedete delle linee sulla superficie di una sfera: quelle blu non sono
geodetiche (sono circonferenze minori), quelle rosse sono geodetiche (sono circonferenze
massime). Vedremo tra non molto che comunque presi due punti A e B su una circonferenza
minore, l'arco (minore) AB non rappresenta mai il percorso minimo tra A e B.
15
Si suppone che sia definita la lunghezza di un arco di curva tracciato su Σ.
Pagina 46
Geometrie non euclidee
Mario Sandri
La nozione di linea geodetica è piuttosto astratta ma proprio per questo unificante: enti geometrici
che siamo abituati a pensare come sostanzialmente diversi (ad esempio rette euclidee di E2 e
circonferenze massime di S2) diventano casi particolari di un concetto generale di "linea più breve".
Ed è proprio l'idea intuitiva di "linea più breve" o di "linea più dritta" che aiuta ad avvicinarci a
questo nuovo concetto. Naturalmente il nostro approccio alla nozione di linea geodetica è informale
e intuitivo; in particolare si noterà la mancanza di rigore nella locuzione "non troppo lungo" riferita
ad un arco di curva. La branca della matematica che si occupa della geometria delle superfici curve
(e quindi dello studio delle linee geodetiche) è la geometria differenziale ed è uno dei rami più
tecnici e più difficili della matematica moderna. I primi ad occuparsi di geometria differenziale
sono stati i grandi matematici tedeschi Gauss e Riemann (allievo di Gauss). Il primo trattato di
geometria differenziale (Disquisitiones circa superficies curvas), di Gauss, è del 1827.
Geodetiche su una superficie cilindrica
Per il momento l'unica superficie curva di cui abbiamo individuato le geodetiche è la superficie
sferica (tale superficie, come si intuisce, è la più facile da studiare ed è quella che più ci interessa).
E' opportuno però, per chiarire la nozione di linea geodetica, affrontare qualche altra situazione: ora
studieremo le geodetiche sulla superficie di un cilindro. Procediamo in questo modo: tracciamo su
un foglio trasparente (un lucido) alcune rette, con inclinazione diversa e di colore diverso, come
vedete in figura 1. Arrotoliamo poi il lucido come indicato in figura (il foglio deve sovrapporsi a se
stesso più volte).
Pagina 47
Geometrie non euclidee
Mario Sandri
Otterremo, come è chiaro, un cilindro (senza basi). Le linee rette sulla superficie piana del lucido si
sono trasformate in linee curve sulla superficie di un cilindro: le abbiamo riportate in figura 2 (voi
però le vedrete tutte sullo stesso cilindro e potrete distinguerle grazie ai loro colori).
Tutte le linee ottenute sono linee geodetiche: tenete infatti presente che si passa dal piano (foglio) al
cilindro (foglio arrotolato) operando una flessione senza dilatazione. Ciò significa che la distanza
tra due punti A e B presi su una retta del foglio rimane invariata quando la retta si arrotola sul
cilindro. Si intuisce quindi che le geodetiche sul foglio si trasformano in geodetiche sul cilindro.
Pagina 48
Geometrie non euclidee
Mario Sandri
Se questo discorso non vi convince fate una verifica diretta sul cilindro col metodo dell'elastico,
considerando archi non troppo lunghi su ciascuna geodetica.
Tornate alla figura 2: le linee r2, r3, r4 si chiamano eliche circolari, r1 è una retta (generatrice del
cilindro) e r5 è una circonferenza che si trova su un piano perpendicolare all'asse del cilindro.
Osserverete che le eliche r2, r3, r4 hanno passo diverso (il passo di un'elica circolare è la distanza
costante tra due "spire" successive, ad esempio r2 ha un passo maggiore di r3).
Pagina 49
Geometrie non euclidee
Mario Sandri
Naturalmente sulla superficie del cilindro esistono infinite eliche di passo diverso. Possiamo
considerare anche le linee r1 e r5 come particolari eliche circolari (la prima di passo infinito, la
seconda di passo zero). Si potrebbe dimostrare che tutte le geodetiche della superficie cilindrica
sono eliche circolari (tenendo conto anche di quelle del tipo r1 e r5). Ora attenzione, riflettiamo
sulla figura 6. Come vedete per i punti A e B passano due archi di linee geodetiche: un arco
rettilineo e un arco di elica (quest'ultimo parte da A, passa dietro al cilindro e raggiunge B).
E' chiaro però che il percorso minimo è l'arco geodetico rettilineo (su questo si disporrebbe
l'elastico). La cosa da capire è allora questa: i due punti A e B staccano un arco che possiamo
considerare non troppo lungo sulla geodetica rettilinea ma non sull'elica. Si può inoltre osservare
che per A e B passano infinite geodetiche (basta considerare eliche da A a B con passo via via
decrescente) ma per nessuna di esse, eccetto la geodetica rettilinea, l'arco AB può considerarsi non
troppo lungo (anzi via via che il passo decresce l'arco AB diventa sempre più lungo). Osserviamo
Pagina 50
Geometrie non euclidee
Mario Sandri
infine che tutte le eliche finora considerate sono eliche destre; se avessimo arrotolato il lucido
nell'altro modo possibile (vedi figura 8) avremmo ottenuto delle eliche sinistre.
In figura 9 sono rappresentate un'elica destra e un'elica sinistra; potete distinguerle in questo modo:
ruotando in senso antiorario nell'elica destra si sale, in quella sinistra si scende.
Pagina 51
Geometrie non euclidee
Mario Sandri
Geodetiche sul cubo
E' chiaro che su ogni faccia di un cubo gli archi geodetici sono segmenti; l'unica cosa da capire
è come una linea geodetica "attraversi" uno spigolo. Osservate il cubo in figura 1: un elastico è stato
teso tra i punti A e B che si trovano su facce consecutive.
Ci rendiamo conto di una semplice regola che caratterizza le geodetiche sul cubo:
gli angoli α e β che l'elastico forma con lo spigolo sono uguali. Del resto se
rappresentassimo le due facce in questione nel piano (fig. 2) ci renderemmo conto
che gli angoli α e β sono angoli opposti al vertice. In figura 3 vedete due linee
geodetiche r e s. Per un essere bidimensionale che si muovesse sul cubo
sarebbero percorsi intrinsecamente "rettilinei".
In figura 4 vedete il cubo sviluppato nel piano: le linee r e s sono segmenti i cui estremi saranno
identificati quando il cubo verrà assemblato nello spazio.
Pagina 52
Geometrie non euclidee
Mario Sandri
Le due geodetiche r e s appaiono, dal nostro punto di vista tridimensionale, rispettivamente come
un quadrato e come un esagono regolare (possiamo ottenerle segando la superficie del cubo con due
piani opportuni); ma dal punto di vista intrinseco di un essere bidimensionale sarebbero dei
monogoni, cioè dei poligoni con un solo lato16. Osservate ora il percorso rosso sul cubo in figura 5:
non è una geodetica ma un triangolo t (intrinseco) ottenuto collegando tre archi geodetici. La figura
6 mostra che l'attraversamento di uno spigolo non avviene rispettando la regola degli angoli uguali.
D'altra parte la definizione di linea geodetica che abbiamo dato non può essere applicata al nostro
percorso triangolare t, infatti per quanto piccolo sia scelto il numero positivo ε, posso sempre
trovare due punti A e B tali che la lunghezza dell'arco AB di t sia minore di ε e tali che l'arco AB di
t non rappresenti il percorso più breve da A a B (figura 7).
16
Un essere bidimensionale non potrebbe rendersi conto in alcun modo dell'attraversamento di uno spigolo. I punti di
uno spigolo sono dal suo punto di vista perfettamente equivalenti a quelli che per noi si trovano, ad esempio, nella parte
centrale di una faccia. Noi percepiamo uno spigolo in quanto intersezione di due facce piane disposte, nello spazio
tridimensionale, su piani diversi. Se non siete convinti, prendete un foglio di carta e operate una piegatura: si formerà
uno spigolo. Ora schiacciate perfettamente il foglio sul piano: lo spigolo non è più individuabile.
Pagina 53
Geometrie non euclidee
Mario Sandri
Curvatura
State guidando su una strada in cui si alternano tratti rettilinei e tratti con curve. Vi trovate, in
questo momento, su un tratto rettilineo: non avete bisogno di sterzare, non avete bisogno di
modificare la traiettoria rettilinea dell'automobile. Diremo che in questo punto del percorso la
curvatura è zero. Ora state affrontando una curva "larga": dovete agire sullo sterzo, dovete
modificare la traiettoria rettilinea ma lo farete lievemente, con una piccola rotazione dello sterzo. In
questo punto il percorso ha una "piccola" curvatura. Ecco infine una curva "stretta": dovete agire
sullo sterzo molto rapidamente, ruotandolo più di prima (potremmo dire che ora vi allontanate dalla
traiettoria rettilinea, cioè dalla tangente al percorso, più rapidamente di quanto non abbiate fatto
nella curva precedente). In questo punto il percorso ha una "grande" curvatura.
Abbiamo dato un'idea intuitiva di cosa si intenda, nel piano euclideo, per curvatura di una linea in
un dato punto. Come possiamo dare significato matematico a questa nozione intuitiva? Cominciamo
a ragionare sulle linee piane più semplici che conosciamo. Per le rette c'è poco da dire: non c'è
Pagina 54
Geometrie non euclidee
Mario Sandri
curvatura in alcun punto, la curvatura è sempre nulla. Consideriamo invece delle circonferenze;
osserviamo in particolare l'animazione seguente in cui vediamo alcune circonferenze, di raggio
diverso, che hanno tutte in comune un punto P.
Cosa possiamo dire della curvatura in P? È facile capire che se aumenta il raggio delle nostre
circonferenze la curvatura diminuisce. È allora abbastanza naturale definire la curvatura per
ciascuna circonferenza come l'inverso del suo raggio r
curvatura =
1
r
Osservate che questa definizione è indipendente dalla scelta del punto P: per una data circonferenza
la curvatura dipende solo dal raggio ed è uguale in tutti i punti. Questo non ci meraviglia data
l'assoluta simmetria delle circonferenze (ogni punto è, per i nostri fini, assolutamente equivalente
agli altri). Del resto se doveste guidare un'automobile su un percorso perfettamente circolare non
dovreste, una volta trovata la giusta rotazione dello sterzo, effettuare più alcuna correzione. Quindi:
le circonferenze sono linee piane a curvatura costante e la
loro curvatura è uguale all'inverso del raggio.
Si potrebbe dimostrare che le uniche linee piane a curvatura
costante sono le rette (curvatura zero) e le circonferenze
(curvatura 1/r). Vediamo rapidamente come si possa definire
la curvatura in un punto P per una generica linea curva γ che
si trovi nel piano. L'idea è questa: cerchiamo di
Pagina 55
Geometrie non euclidee
Mario Sandri
approssimare, nelle vicinanze di P, la nostra linea con una circonferenza; se ci riusciamo il gioco è
fatto, diremo che la curvatura di γ in P è uguale alla curvatura di questa circonferenza. Ma come
determinare la circonferenza che meglio approssima γ in P? Consideriamo due punti A e B su γ
molto vicini al punto P. Sappiamo che per tre punti non allineati passa una e una sola circonferenza,
quindi per A, P e B passa una ben determinata circonferenza. Ora facciamo tendere verso P sia il
punto A che il punto B (facendoli muovere sempre sulla nostra curva γ): si intuisce che
individueremo una circonferenza limite. È questa la circonferenza che cerchiamo: prende il nome di
cerchio osculatore a γ in P. E' anche chiaro cosa si debba intendere per raggio di curvatura e centro
di curvatura per una curva γ in P: si tratta rispettivamente del raggio e del centro del cerchio
osculatore a γ in P. Naturalmente per una generica linea curva piana la curvatura varierà al variare
del punto P (al contrario di quanto accade per le circonferenze che hanno curvatura costante).
Osservando la figura seguente potete ad esempio rendervi conto come la curvatura nei due punti P e
P' di una parabola sia ben diversa. La curvatura nel vertice P, uguale a 1/r, è decisamente maggiore
della curvatura in P' (uguale a 1/r' ). In geometria differenziale si dimostra che la curvatura in P di
una parabola varia con continuità al variare con continuità di P sulla curva. Man mano che P si
allontana su ciascuno dei due rami della parabola la curvatura tende a zero.
Consideriamo ora nel piano due punti A e B e le circonferenze che passano per A e B (sono infinite,
hanno tutte il centro sull'asse del segmento AB).
Pagina 56
Geometrie non euclidee
Mario Sandri
Si capisce che tanto maggiore è il raggio della circonferenza (quindi tanto minore è la curvatura),
tanto minore sarà la lunghezza dell'arco AB. Anzi ci rendiamo conto che facendo tendere il raggio
all'infinito (e quindi la curvatura a zero) l'arco AB tende al segmento AB.
Geodetiche e curvatura intrinseca
Abbandoniamo ora il piano euclideo E2 e torniamo a considerare la superficie di una sfera (lo
spazio S2)17. Immaginiamo degli esseri bidimensionali liberi di muoversi in S2: il loro spazio è la
superficie di una sfera. Per noi che contempliamo la sfera immersa nello spazio tridimensionale
questi esseri vivono sulla superficie S2 (punto di vista estrinseco); ma per loro non ha senso parlare
di "sopra", diranno di vivere in S2 (punto di vista intrinseco), così come noi diciamo di vivere nello
spazio tridimensionale. Immaginate ora che uno di questi esseri si muova lungo una circonferenza
massima: potete essere certi che dal suo punto vista (intrinseco) dirà di "andar dritto"; abbiamo
infatti visto come le circonferenze massime su una sfera siano l'equivalente delle rette nel piano
euclideo (geodetiche). Quindi:
da un punto di vista intrinseco le circonferenze massime non hanno curvatura.
Ciò può essere illustrato con un metodo suggestivo, di tipo meccanico, che ci consente di decidere
se stiamo andando dritto o se stiamo curvando. Consideriamo un carrellino a due ruote indipendenti,
come in figura 1.
17
Vi crea qualche problema il fatto di utilizzare il termine spazio per indicare anche il piano o la superficie di una sfera?
Da una punto di vista matematico il termine spazio viene spesso usato al posto di ambiente geometrico. E un ambiente
geometrico può avere una, due, tre dimensioni (o anche più di tre). Ad esempio, possiamo considerare una retta come
uno spazio a 1 dimensione. La nozione matematica di spazio è molto più generale e astratta di quella del linguaggio
comune.
Pagina 57
Geometrie non euclidee
Mario Sandri
Se spingiamo il carrellino sul piano, lungo un percorso rettilineo, la ruota di sinistra percorrerà, in
ogni istante, la stessa distanza di quella di destra mentre ciò non accadrà su un tratto di curva (figura
2).
Analogamente se spingeremo il carrellino sulla superficie di una sfera, lungo una circonferenza
massima, le due ruote percorreranno la stessa distanza (stiamo andando "dritto") mentre ciò non
accadrà se spingeremo il carrellino lungo un parallelo che non sia un equatore. Osservando la figura
3 potete rendervi conto che nel caso del percorso superiore la ruota più a nord percorre una distanza
minore di quella più a sud. Nel secondo percorso invece le ruote si muovono su paralleli simmetrici
rispetto all'equatore.
Pagina 58
Geometrie non euclidee
Mario Sandri
Circonferenze intrinseche
Sappiamo bene che una circonferenza è, nel piano euclideo, il luogo dei punti equidistanti da un
punto dato (il centro). Applichiamo la stessa definizione a S2, tenendo conto delle distanze
intrinseche da P. Nella figura seguente è rappresentata una circonferenza intrinseca di centro P e
raggio s.
Come vedete una circonferenza intrinseca è una circonferenza anche dal punto di vista estrinseco
(possiamo ottenere la stessa circonferenza tagliando la superficie sferica con un piano) ma da un
punto di vista estrinseco avrebbe centro e raggio diversi (nella figura seguente: centro P' e raggio
s').
Un essere bidimensionale traccerebbe in S2la sua circonferenza proprio come facciamo noi nel
piano: fisserebbe un filo nel punto P e poi si muoverebbe in modo da descrivere una curva chiusa
tenendo il filo sempre in tensione. Tutti i punti della curva avrebbero la stessa distanza (intrinseca)
da P uguale alla lunghezza del filo. Ci sono però alcune sostanziali differenze fra la geometria delle
circonferenze in E2 e in S2. Assumiamo una superficie sferica S2 di raggio unitario. Potete osservare
che all'aumentare del raggio (intrinseco) r, la lunghezza di una circonferenza in S2 prima aumenta
Pagina 59
Geometrie non euclidee
Mario Sandri
fino ad arrivare al suo massimo 2π quando il raggio è uguale a π/2, poi comincia a diminuire fino ad
andare a zero quando il raggio è uguale a π. Al contrario l'area dei cerchi corrispondenti aumenta
sempre all'aumentare del raggio fino a raggiungere il suo massimo 4π quando il raggio è uguale a π
(in questo caso l'area del cerchio è uguale all'area di tutta la superficie sferica, cioè di tutto lo
"spazio" che ha area finita).
Ma la cosa più interessante da notare è questa: se consideriamo le infinite circonferenze intrinseche
di centro P e raggio r (vedi figura 3), tra queste c'è una e una sola circonferenza massima (quella di
raggio π/2). Questa circonferenza è però anche una geodetica, è cioè intrinsecamente retta.
Possiamo quindi concludere che in S2 le linee rette sono particolari circonferenze. Ciò non accade
nel piano euclideo dove rette e circonferenze sono enti geometrici ben distinti (a meno che non si
consideri una retta come una circonferenza di raggio infinito). Qui ci rendiamo conto dell'eleganza
della geometria su S2. Occupiamoci ora di un'altra questione di fondamentale importanza. In fig. 4
vedete una circonferenza. Il centro intrinseco è il punto A mentre il centro estrinseco è il punto A'
(che si trova sul piano secante); il raggio intrinseco è r, quello estrinseco è r'.
Pagina 60
Geometrie non euclidee
Mario Sandri
Tenendo presente che abbiamo assunto una sfera di raggio unitario ci si rende conto che la misura
della raggio intrinseco r non è altro che la misura in radianti dell'angolo euclideo α che vedete in
figura (O è il centro della sfera). Ne segue che tra i due raggi intercorre la relazione
r ' = sin r
e dunque la lunghezza c della circonferenza in funzione del suo raggio intrinseco è
c = 2π sin r
Quindi il rapporto tra circonferenza e diametro (intrinseco) non è, nella geometria sulla sfera,
costante e vale
c π sin r
=
2r
r
La costante π non può dunque essere definita in modo intrinseco come rapporto tra circonferenza e
diametro. Si osservi tuttavia che per valori del raggio intrinseco r molto piccoli (prossimi a zero) si
ritrova la situazione euclidea
c
=π
2r
infatti si ha
lim
r →0
π sin r
r
=π
E' inoltre facile dimostrare che l'area del cerchio in funzione del raggio intrinseco r è data dalla
formula
⎛r⎞
4π sin 2 ⎜ ⎟
⎝2⎠
Pagina 61
Geometrie non euclidee
Mario Sandri
Geodetiche e curvatura estrinseca
Abbiamo detto che le circonferenze massime di S2, cioè le geodetiche, non hanno curvatura
intrinseca. Ma se assumiamo il punto di vista estrinseco, cosa si può dire? Consideriamo due punti
non antipodali A e B sulla superficie sferica e la retta AB che attraversa la sfera nello spazio
tridimensionale. Consideriamo il fascio di piani per A e B (li ottenete facendo ruotare il piano a
della figura seguente attorno all'asse AB). Ognuno di questi piani stacca sulla superficie sferica una
circonferenza per A e B. Tra queste circonferenze avremo una (e una sola) circonferenza massima
quando il piano a passa per il centro della sfera O.
Ora supponiamo di rappresentare tutte queste circonferenze in uno stesso piano, come in figura 2.
Si capisce che il percorso minimo tra A e B sarà l'arco di minor curvatura cioè l'arco della
circonferenza massima (come del resto ci aspettavamo). La circonferenza massima è quella di
raggio r, dove r è il raggio della sfera. Questa circonferenza che in S2 non ha curvatura (è una
geodetica, è una retta), ha invece curvatura 1/r quando viene rappresentata nel piano. Si tratta,
ripetiamolo, di curvatura estrinseca. Possiamo quindi concludere che: le geodetiche di S2 sono le
circonferenze che hanno curvatura (estrinseca) minima.
Pagina 62
Geometrie non euclidee
Mario Sandri
La geometria di S2 è non euclidea
Abbiamo ormai preparato il terreno per esaminare gli elementi fondamentali della geometria
sulla sfera. I punti del nostro ambiente geometrico sono evidentemente i punti della superficie
sferica. Chiameremo inoltre:
a) retta ogni linea geodetica (cioè ogni circonferenza massima);
b) segmento ogni arco di geodetica.
E' anche facile intendersi su cosa siano gli angoli e su come misurali. Per comodità daremo una
definizione estrinseca di angolo: l'angolo formato da due segmenti con un estremo in comune è
l'angolo formato dai due piani che contengono le due circonferenze massime su cui giacciono i
segmenti. In figura 1, ad esempio, si vedono due segmenti AB e AC e le due circonferenze massime
s e s' su cui giacciono. Supponiamo che le due circonferenze massime dividano la superficie sferica
di centro O in 4 regioni uguali. E' chiaro allora che l'angolo formato dai due segmenti è retto: i due
piani ABO e ACO da considerare sono infatti perpendicolari (potete pensare di dividere un'arancia
in quattro spicchi uguali operando due tagli perpendicolari).
Riferendoci alla figura 1, diremo inoltre che le due rette s e s' sono perpendicolari. Esaminiamo ora
rapidamente le principali caratteristiche non euclidee della nostra geometria, assumendo d'ora in poi
un raggio unitario per la sfera.
(1) Per due punti del piano euclideo passa una e una sola retta; lo stesso accade per due punti
non antipodali di S2, ma per due punti antipodali passano infinite rette.
(2) Due rette euclidee hanno al più un punto in comune mentre due rette di S2 hanno sempre
due punti in comune; in figura 2 vedete due rette s, s' che si incontrano nei punti A e B (A e
B sono necessariamente antipodali).
Pagina 63
Geometrie non euclidee
Mario Sandri
(3) Nel piano euclideo esistono rette parallele mentre non esistono rette parallele (cioè rette che
non si intersechino) in S2.
Osservate ad esempio la figura 3 che mostra due situazioni analoghe, l'una nel piano
euclideo e l'altra in S2. Si tratta di un fascio di rette perpendicolari alla retta s: nel piano
euclideo queste rette non si incontrano (sono tutte parallele), in S2 si incontrano tutte nei due
punti antipodali P e P'.
I due punti P e P' prendono il nome di poli di s e la retta s prende il nome di retta polare dei
punti P e P'. Si osservi che i due poli di s hanno la stessa distanza π/2 da ogni punto della
retta s. Questa proprietà dei poli appare meno strana se si pensa che la retta s può essere
considerata anche come circonferenza intrinseca di centro P (o di centro P') e raggio π/2.
(4) Nel piano euclideo esiste una e una sola retta passante per un dato punto P e perpendicolare
a una data retta s; in S2 ciò è vero se e solo se P non è un polo per s (vedi fig. 4).
Pagina 64
Geometrie non euclidee
Mario Sandri
(5) Le rette euclidee sono infinitamente estese mentre le rette di S2 hanno tutte la stessa
lunghezza finita 2π.
(6) Il piano euclideo è infinitamente esteso mentre S2 ha area finita 4π.
(7) Di tre punti qualsiasi di una retta euclidea, uno e uno solo sta fra gli altri due; la stessa cosa
non si può dire per una retta di S2 trattandosi di una linea chiusa. Osservate la figura 5: nel
caso euclideo per andare da A a B passo necessariamente per C (quindi C sta fra A e B), nel
caso di S2 posso andare da A a B senza passare per C. Notate inoltre che due punti
individuano nel piano euclideo uno e un sol segmento mentre ne individuano due nel caso di
S2.
La geometria di S2 è una geometria ellittica
È stato detto che sostituendo al postulato P5 di Euclide il postulato P5" si ottiene una geometria
non euclidea ellittica. Riformuliamo l'assioma che caratterizza la geometria ellittica:
Assioma ellittico: due rette si intersecano sempre.
Ci siamo resi conto che la geometria di S2 è una geometria ellittica: per lo spazio S2 vale infatti
l'assioma ellittico. Potremo anche dire che S2 è un modello di geometria ellittica. E' importante
osservare che nella geometria su S2 non solo viene a cadere il quinto postulato ma cade anche
l'assunzione
(A2) Per due punti distinti passa un'unica retta
che Euclide utilizzò senza però un'esplicita dichiarazione. Inoltre deve essere modificato il postulato
Pagina 65
Geometrie non euclidee
Mario Sandri
(P2) Un segmento di linea retta può essere indefinitamente prolungato in linea retta
da cui Euclide faceva discendere l'infinita lunghezza di una retta; ogni segmento di S2 può
effettivamente essere prolungato in una retta, ma le rette di S2 sono linee chiuse per cui un punto P
può muoversi indefinitamente su di esse ma è destinato a riassumere le stesse posizioni. Le rette
euclidee sono infinite mentre quelle ellittiche hanno lunghezza finita. Sono invece senz'altro
verificati nella geometria su S2 i postulati euclidei P1, P3, P4. Diremo infine che la geometria di S2 è
una geometria ellittica doppia poiché due rette si intersecano sempre in due punti; vedremo nel
seguito che esiste anche una geometria ellittica singola.
Triangoli sferici
In figura 1b vedete un triangolo sferico: i suoi tre lati sono naturalmente segmenti di S2, cioè
archi geodetici. Da un punto di vista intrinseco dovremmo parlare semplicemente di triangolo.
Cerchiamo di definire più precisamente un triangolo sferico. Nel piano euclideo tre punti non
allineati individuano uno e un sol triangolo: basta collegare coppie di punti con un segmento. Le
cose non sono così semplici su S2. In primo luogo due punti non antipodali possono essere collegati
con due diversi segmenti (un arco minore e un arco maggiore di circonferenza massima, vedi figura
1a). Stabiliamo allora di considerare solo archi minori. C’è poi da osservare che tre archi minori,
non disposti sulla stessa circonferenza massima e aventi a coppie un estremo in comune, delimitano
due regioni sulla sfera (come ogni altra linea chiusa). Chiamiamo allora triangolo sferico quella
regione, delle due, che ha area minore. In tal modo tre archi minori individuano un'unica regione
triangolare che ha sempre superficie minore di quella di una semisfera18. In figura 1b vedete
rispettivamente in giallo e in azzurro le due regioni delimitate da tre archi minori: il triangolo
sferico individuato dai tre archi è chiaramente quello azzurro.
18
La nostra definizione di triangolo sferico, che è quella oggi generalmente assunta, si discosta di poco dalla classica
definizione di Eulero (Trigonometria sphaerica universa, Pietroburgo, 1779). I triangoli sferici euleriani contemplano
anche il caso "degenere" in cui ciascuno dei tre lati possa essere uguale a una semicirconferenza massima (ma non
maggiore di essa). Più generali sono invece le nozioni di triangolo sferico assunte da Lobacevskij (1835) e Möbius
(1860).
Pagina 66
Geometrie non euclidee
Mario Sandri
Ora osserviamo la figura 1b. Ogni lato del triangolo è lungo 1/4 di circonferenza massima cioè π/2 e
l'area del triangolo è pari a 1/8 dell'area di S2 cioè è uguale, ancora, a π/2 (non dimenticate che
abbiamo assunto una sfera di raggio unitario che ha area totale 4π). Ma la cosa più importante da
osservare è la somma degli angoli: nel nostro caso è di 270°. Viene dunque a cadere il teorema
euclideo sulla somma degli angoli di un triangolo. Ma c'è di più: mentre la somma degli angoli è
costante per i triangoli euclidei, per i triangoli sferici tale somma varia al variare del triangolo.
Come vedete A è un polo per la retta s e i segmenti AB e AP sono perpendicolari a s. I triangoli
APB che vengono a formarsi al variare di P su s hanno, tutti, due angoli retti mentre il terzo angolo,
quello in A, è variabile. È quindi variabile anche la somma degli angoli. Per tutti questi triangoli la
somma degli angoli è maggiore di 180° e si capisce che facendo tendere a zero l'angolo in A la
somma degli angoli tende a 180°. Non deve sorprenderci il fatto che per i triangoli sferici non valga
la proprietà euclidea della somma degli angoli di un triangolo. Come si è già detto, tale proprietà è
logicamente equivalente al quinto postulato di Euclide e, come sappiamo, nella geometria di S2 tale
postulato non vale mentre vale l'assioma ellittico.
Pagina 67
Geometrie non euclidee
Mario Sandri
Due questioni tecniche
Nel seguito ci farà comodo misurare gli angoli in radianti (anziché in gradi) e dovremo calcolare
l'area di fusi sferici. Risolviamo rapidamente le due questioni.
a) Misura degli angoli in radianti
Consideriamo la circonferenza di raggio unitario in figura 1.
Ad ogni angolo al centro a corrisponde un arco di circonferenza t (vedi figura). Tra angoli e archi
c'è una relazione di proporzionalità diretta: se si raddoppia l'angolo si raddoppia anche l'arco, se si
triplica l'angolo si triplica anche l'arco, ecc. (e viceversa). Possiamo quindi assumere come misura
dell'angolo la misura dell'arco corrispondente. Parleremo in questo caso di misura dell'angolo in
radianti. Ad esempio ad un angolo di 90° corrisponde un arco di lunghezza π/2; quindi la misura in
radianti di un angolo di 90° è π /2. In generale possiamo scrivere la proporzione
α : t = 360 : 2π
dove α è la misura in gradi dell'angolo e t la lunghezza dell'arco corrispondente (quindi t è la misura
in radianti dell'angolo). Ne segue
t=
πα
180
Quest'ultima formula ci consente di passare dalla misura in gradi di un angolo a quella in radianti.
Viceversa possiamo passare dalla misura in radianti a quella in gradi con la formula
α=
180 t
π
Pagina 68
Geometrie non euclidee
Mario Sandri
b) Area di un fuso sferico
Un fuso sferico è la regione della superficie sferica compresa tra due semicirconferenze massime
aventi il diametro AB in comune. In figura 2 è evidenziato un fuso sferico: s ed s' sono due
circonferenze massime e AB è un diametro della sfera. E' anche evidenziato l'angolo a del fuso.
Si capisce che l'area di un fuso è direttamente proporzionale all'angolo del fuso; si può quindi
scrivere la proporzione
A : α = 4π r 2 : 2π
dove A è l'area del fuso, α è l'angolo del fuso espresso in radianti, 4π r 2 è l'area di tutta la superficie
sferica e 2π è l'angolo giro espresso in radianti. Per una sfera di raggio unitario (r = 1) si ha
A = 2α
ove α è l'angolo del fuso espresso in radianti. È infine evidente che l'area del doppio fuso sferico
della figura 3 è
A = 4α
Pagina 69
Geometrie non euclidee
Mario Sandri
Somma degli angoli di un triangolo sferico
Siamo ora pronti per dimostrare il teorema fondamentale sui triangoli sferici. Assumeremo
come sempre una sfera unitaria e misureremo gli angoli in radianti. In figura 1 vedete il triangolo
sferico ABC: consideriamo la somma s degli angoli
s=α+β+γ
Ci siamo resi conto che s non è costante, ma varia al variare del triangolo. Il nostro obiettivo è
quello di esprimere s in funzione di un unico parametro che rappresenti una proprietà caratteristica
di ogni dato triangolo. Questo parametro potrebbe essere proprio l'area del triangolo. Proviamo la
nostra ipotesi. Osserviamo subito che le tre rette s1, s2, s3, individuano sulla superficie della sfera
Pagina 70
Geometrie non euclidee
Mario Sandri
due triangoli: il triangolo ABC e il triangolo antipodale A'B'C' uguale ad ABC19 (figura 1).
Consideriamo ora i tre doppi fusi delle figure 2, 3 e 4: il primo è individuato dalle circonferenze
massime s1 e s2, il secondo da s2 e s3, il terzo da s1 e s3. Gli angoli dei fusi sono gli angoli del nostro
triangolo cioè sono rispettivamente α, β, γ.
Se consideriamo contemporaneamente i tre doppi fusi ci accorgiamo che ricoprono tutta la
superficie sferica; inoltre i due triangoli ABC e A'B'C' vengono ricoperti tre volte (potete infatti
notare in figura 4 che il triangolo ABC viene ricoperto successivamente in azzurro, verde e giallo e
lo stesso accade per il triangolo antipodale).
19
I triangoli ABC e A'B'C' sono inversamente uguali (simmetrici rispetto al centro della sfera); i due triangoli hanno lati
e angoli corrispondenti uguali ma non c'è modo di portare ABC su A'B'C' facendolo "scorrere" sulla superficie sferica.
Si intuisce però che i due triangoli hanno la stessa area e questo è ciò che ora ci interessa.
Pagina 71
Geometrie non euclidee
Mario Sandri
Allora
area sup. sferica = area dei tre doppi fusi - 2 volte area ABC - 2 volte area A'B'C'
Quindi, tenendo conto che i due triangoli ABC e A'B'C' sono uguali e applicando la formula che
fornisce l'area di un doppio fuso, si ha
4π = 4α + 4β + 4γ – 4A
ove abbiamo indicato con A l'area del nostro triangolo ABC. Ne segue la formula
α+β+γ=π+A
Concludendo:
la somma degli angoli di un triangolo sferico è sempre maggiore di un angolo piatto ed è uguale a
un angolo piatto più l'area del triangolo.
La stessa formula si può leggere anche così: l'area di un triangolo sferico è uguale alla somma dei
suoi angoli (misurati in radianti) meno π.
Pagina 72
Geometrie non euclidee
Mario Sandri
La formula ellittica α + β + γ = π + A
La formula per la somma degli angoli di un triangolo sferico costituisce un risultato importante
che merita alcune riflessioni.
a) La formula α + β + γ = π + A ci dice che la somma degli angoli di un triangolo sferico
varia al variare dell'area del triangolo. Tanto maggiore è l'area del triangolo, tanto più la
somma degli angoli si discosta da π. Per triangoli di area molto piccola rispetto a π la nostra
formula ci fornisce valori quasi euclidei per la somma degli angoli. In altri termini le due
formule
possono considerarsi equivalenti se l'area A del triangolo sferico tende a zero. In questo
senso possiamo affermare che la geometria euclidea è un caso limite della geometria
ellittica. In effetti se ci limitassimo a considerare un intorno molto piccolo di un punto P
sulla superficie sferica, potremmo approssimare questa piccola regione con una
corrispondente regione del piano tangente in P alla sfera. E la geometria sul piano tangente è
naturalmente una geometria euclidea.
b) Si potrebbe dimostrare che per i triangoli sferici valgono quattro criteri di uguaglianza: i
primi tre sono del tutto analoghi a quelli per i triangoli euclidei, il quarto criterio è invece il
seguente: due triangoli sferici sono uguali se hanno angoli corrispondenti uguali. Nel piano
euclideo due triangoli che abbiano angoli corrispondenti uguali non sono in generale uguali
Pagina 73
Geometrie non euclidee
Mario Sandri
ma sono simili; se però due triangoli simili hanno la stessa area allora sono necessariamente
uguali. Nel caso dei triangoli sferici abbiamo visto che avere angoli corrispondenti uguali (e
quindi somme angolari uguali) implica avere aree uguali; ne segue che triangoli sferici simili
sono necessariamente uguali.
c) Avrete certamente notato il ruolo fondamentale di π nella geometria sferica: distanze,
aree, angoli possono essere espressi in funzione di π (considerate ad esempio il triangolo
equilatero "trirettangolo": ogni lato è lungo π/2, l'area è π/2, ogni angolo è π/2). Tenete
presente che il confronto tra aree e angoli è così semplice proprio perchè abbiamo misurato
gli angoli in radianti. È importante osservare però che la costante π ha una sua definizione
estrinseca (rapporto tra lunghezza di una circonferenza estrinseca e suo diametro) mentre
non può essere definita intrinsecamente (per le circonferenze intrinseche il rapporto tra la
loro lunghezza e il doppio del raggio non solo non è uguale a π ma non è nemmeno
costante).
d) La formula α + β + γ = π + A è
stata dimostrata nell'ipotesi di una
sfera di raggio unitario.
Ma è
molto facile ottenere una formula
anche nel caso generale di una
sfera di raggio r. Osservate la
figura 2: abbiamo tracciato un
triangolo su un quadrato che
possiamo
immaginare
di
tela
elastica. Se stiriamo la tela sia
orizzontalmente che verticalmente
in modo da raddoppiare i lati (omotetia di coefficiente 2), l'area del triangolo quadruplica
(perchè raddoppiano sia base che altezza). Non varia invece la misura degli angoli (si
conserva la forma). In generale se stiriamo il quadrato di un fattore r, l'area del triangolo
aumenta secondo un fattore r². La stessa cosa avviene su una superficie sferica: se dilatiamo
una sfera di raggio unitario in una sfera di raggio r, l'area di ogni figura tracciata sulla
superficie sferica deve essere moltiplicata per un fattore r². Torniamo ora alla nostra formula
per la sfera unitaria che possiamo scrivere
Pagina 74
Geometrie non euclidee
Mario Sandri
A=α+β+γ-π
Se passiamo a una sfera di raggio r, l'area A deve essere moltiplicata per un fattore r²,
mentre non cambiano gli angoli; quindi si ha
A = r² (α + β + γ – π)
Ne segue
α + β + γ = π + A/r2
Nella formula α + β + γ = π + A/r2 il termine A/r² prende il nome di eccedenza angolare del
triangolo (o eccesso sferico del triangolo) e si indica con E; pertanto la formula può scriversi
nella forma α + β + γ = π + E. Come si vede, l'eccedenza angolare ci dice di quanto la
somma degli angoli supera π; nel caso di una sfera unitaria l'eccedenza angolare coincide
con l'area del triangolo.
Le tre geometrie
La formula dimostrata precedentemente
e le riflessioni su di essa sviluppate ci
consentono di accennare ad una profonda
questione che concerne la geometria degli
spazi
bidimensionali.
Ci
farà
comodo
ricorrere ancora una volta alla metafora di un
mondo bidimensionale, popolato da esseri
bidimensionali.
Tali
esseri
potrebbero
scoprire quale tipo di geometria intrinseca
ammetta il loro mondo facendo il semplice
esperimento (intrinseco) che consiste nel
misurare gli angoli di un triangolo (non
troppo piccolo). Se scoprissero che la somma
degli angoli è uguale a un angolo piatto
potrebbero desumere che la loro geometria è
euclidea (un modello per il loro mondo
Pagina 75
Geometrie non euclidee
Mario Sandri
sarebbe il piano euclideo). Se invece scoprissero che la somma degli angoli è maggiore di un angolo
piatto potrebbero desumere il carattere ellittico della loro geometria. C'è infine un terzo caso
possibile: che la somma degli angoli sia minore di un angolo piatto: è il caso della geometria
iperbolica. La figura 1 mostra tre superfici bidimensionali che
ammettono le tre diverse geometrie; nel caso dell'ultima
superficie, a forma di sella, si intuisce che la somma degli
angoli del triangolo è minore di un angolo piatto (naturalmente
i lati del triangolo sono archi geodetici). C'è un modo molto
semplice per costruire un modello di superficie a sella.
Disegnate su un foglio di carta un cerchio e un settore circolare
con lo stesso raggio del cerchio e un'ampiezza, diciamo, di 60
gradi (fig. 2). Ritagliate il cerchio e il settore. Tagliate il cerchio
lungo un suo raggio in modo che presenti una fessura. Inserite nella
fessura il settore e fissatelo ai bordi della fessura con del nastro
adesivo trasparente. Naturalmente questa operazione di inserimento
non è possibile se si rimane nel piano (stiamo pretendendo di inserire
altri 60 gradi in un angolo giro); ma potremo farlo se lascieremo
flettere la superficie nella terza dimensione. Otterrete così una
superficie a sella (è opportuno applicare del nastro anche sull'altra
faccia della superficie). La realizzazione di questo modello è molto
istruttiva: vi siete resi conto che una sella invade "più superficie" di quanta possa stare nel piano.
Se provaste a schiacciare la vostra superficie sul piano (ad esempio con un libro) vi rendereste conto
che si formano delle pieghe, delle sovrapposizioni. Questa proprietà caratterizza le superfici a
geometria iperbolica; una proprietà opposta caratterizza la superficie sferica (come sappiamo, a
geometria ellittica); se provate a schiacciare una semisfera nel piano non si creeranno delle
sovrapposizioni ma delle lacerazioni, delle fessure (potete fare
l'esperimento svuotando accuratamente mezza arancia e
schiacciando la buccia emisferica con un libro). La sfera, al
contrario della sella, ha "meno superficie" di quanta ne serva
per schiacciarla nel piano. Esistono dunque tre possibili
geometrie per uno spazio bidimensionale: la geometria
euclidea o geometria a curvatura zero; la geometria ellittica, o
geometria a curvatura positiva; la geometria iperbolica, o
geometria a curvatura negativa. Bisogna precisare, però, che ci stiamo riferendo a spazi omogenei, a
Pagina 76
Geometrie non euclidee
Mario Sandri
spazi cioè la cui geometria locale è la stessa in tutti i punti. Sono ad esempio spazi omogenei E2 ed
S2, mentre non lo è superficie di un toro per quanto sia dotata di una certa simmetria (fig. 4).
Per capire meglio come stanno le cose dobbiamo accennare, sul piano intuitivo e senza pretese di
rigore, a cosa si debba intendere per curvatura in un punto di una superficie.
Curvatura di una superficie
Come ricorderete, per le curve nel piano la nozione di curvatura in un punto P ci consentiva di
valutare lo scostamento della curva dalla tangente nelle immediate vicinanze del punto considerato
cioè lo scostamento dall'andamento rettilineo; in modo analogo la curvatura di una superficie in suo
punto P dovrà misurare lo scostamento della superficie dal piano tangente in P nelle immediate
vicinanze del punto considerato. In fig. 1 vedete ad esempio due porzioni di superfici sferiche: la
sfera a sinistra ha raggio sensibilmente maggiore di quella a destra. Ora si capisce che una grande
sfera ha curvatura minore di una piccola sfera.
Pagina 77
Geometrie non euclidee
Mario Sandri
Osservando la fig. 2 si capisce infatti che la superficie a sinistra si scosta meno dal piano tangente,
in un intorno del punto P, di quanto non accada per la superficie a destra.
Cerchiamo di precisare queste osservazioni di carattere intuitivo. Consideriamo allora una qualsiasi
superficie Σ, un punto P di Σ e la retta n normale a Σ in P (cioè perpendicolare a Σ in P). Ora ogni
piano che contiene la normale n taglia la superficie secondo una curva che prende il nome di
sezione normale per P. Le sezioni normali avranno naturalmente una curvatura in P (come curve
piane) che varia al variare del piano; si dimostra però che la curvatura delle sezioni normali per P
ammette un massimo e un minimo, indichiamoli con k1 e k2, in corrispondenza di due piani tra loro
ortogonali. Bene, chiameremo curvatura di Σ in P il numero
k = k1 k2
Fate attenzione: k1 e k2 sono curvature in P di oggetti
monodimensionali (curve piane) mentre k è, per definizione, la
curvatura in P di un oggetto bidimensionale (superficie). In figura 3
vedete ad esempio un ellissoide; P è un punto della superficie e n è
la normale in P. Le due curve evidenziate in azzurro sono le due
sezioni normali di curvatura in P rispettivamente massima e minima.
La curva orizzontale ha raggio di curvatura minimo r1 (quindi
curvatura massima k1 = 1/r1) e quella verticale ha raggio di
curvatura massimo r2 (quindi curvatura minima k2 = 1/r2). Come
vedete, le due curve si trovano su piani ortogonali. È facile capire come sono state determinate,
considerate un piano che contenga la normale e fatelo ruotare attorno alla normale: si ottengono
delle curve sezione il cui raggio di curvatura, si intuisce, varia con continuità tra r1 e r2. Osservate
inoltre che le due curve sezione evidenziate volgono la concavità entrambe verso il basso rispetto
Pagina 78
Geometrie non euclidee
Mario Sandri
alla normale orientata come in figura; ne consegue che i raggi di curvatura r1 e r2 hanno entrambi
segno negativo (perchè il centro di curvatura si trova sulla semiretta negativa della normale
orientata come in figura e con origine in P) e quindi la curvatura k = 1/(r1 r2) in P è positiva. Per
qualsiasi punto P dell'ellissoide la curvatura, pur variando, rimane sempre positiva (potete rendervi
conto, applicando la definizione, che se il punto P si sposta sulla sommità dell'ellissoide in figura
allora la curvatura della superficie aumenta perchè diminuiscono i raggi di curvatura r1 e r2). Nel
caso di una superficie sferica di raggio r si ha invece che tutte le sezioni normali, per qualsiasi
punto P, sono uguali (sono circonferenze massime di curvatura 1/r); ne segue che la curvatura è
ovunque uguale a 1/r2 ed è sempre positiva. La superficie sferica è a curvatura costante positiva.
Consideriamo ora la superficie a sella in fig. 4. Sono
evidenziate in rosso le due curve σ1 e σ2 che ci
consentono di valutare la curvatura della superficie in P.
Ora attenzione: σ1 è la sezione normale che ha curvatura
massima tra quelle che volgono la concavità verso l'alto
rispetto all'orientamento di n (il raggio di curvatura r1 è
positivo perchè il centro di curvatura si trova sulla
normale al di sopra di P), mentre σ2 è la sezione normale
che ha curvatura massima (in valore assoluto) tra quelle
che volgono la concavità verso il basso (il raggio di
Pagina 79
Geometrie non euclidee
Mario Sandri
curvatura r2 è negativo perchè il centro di curvatura si trova sulla normale al di sotto di P). Poiché k
= 1/(r1 r2) ne segue che la curvatura k è negativa in P. Alla luce di quanto detto, è semplice capire
se una superficie ha curvatura positiva o negativa in un punto P: nel primo caso tutte le sezioni
normali per P volgono la concavità dalla stessa parte rispetto alla normale mentre nel secondo le
sezioni normali volgono la concavità sia da una parte che dall'altra. Esaminiamo infine il caso di
superfici che abbiano in un punto curvatura nulla. Un piano, è chiaro, ha curvatura nulla in tutti i
suoi punti. Le sezioni normali sono infatti delle rette e hanno curvatura nulla in ogni punto. Più
interessante è il caso di un cilindro (senza basi): anche la sua superficie ha curvatura nulla in ogni
punto. In figura 5 vedete una superficie cilindrica e, evidenziate in azzurro, le due sezioni normali
ortogonali per il punto P che ci interessano; la sezione orizzontale è una circonferenza ed ha
curvatura massima k1, quella verticale è una retta ed ha curvatura minima k2 = 0. Ne segue che la
curvatura della superficie in P è k = k1 k2 = 0. Probabilmente vi
sembrerà strano che la superficie cilindrica, che siamo abituati a
considerare una superficie curva, sia in realtà una superficie che
"tecnicamente" ha curvatura nulla in tutti i suoi punti. Ma le cose stanno
proprio così: il fatto è che un cilindro non è altro che un piano
arrotolato. Riflettete sul fatto seguente: possiamo avvolgere un cilindro
con un foglio di carta operando una flessione del foglio senza
lacerazioni; non possiamo fare la stessa cosa con la superficie di una
sfera, di un ellissoide o di un toro. Possiamo ora tornare alla questione
lasciata in sospeso precedentemente; si diceva che la superficie di un
toro non costituisce uno spazio omogeneo.
Uno spazio
omogeneo deve aver la stessa curvatura in ogni suo punto.
Ora ci rendiamo conto che la superficie di un toro ha la
curvatura che cambia da punto a punto; ma c'è di più:
abbiamo regioni del toro a curvatura positiva e regioni a
curvatura negativa (ve ne potete rendere conto facilmente
osservando la fig. 6). L'esistenza di regioni sia a curvatura
positiva che a curvatura negativa ha delle implicazioni
fondamentali per la geometria sulla superficie: nelle regioni
a curvatura positiva la geometria sarà di tipo ellittico (somma degli angoli di un triangolo maggiore
di π), nelle regioni a curvatura negativa sarà di tipo iperbolico (somma degli angoli di un triangolo
minore di π).
Pagina 80
Geometrie non euclidee
Mario Sandri
Geometrie in uno spazio non omogeneo
La superficie di un toro non è uno spazio omogeneo. Vogliamo renderci conto che su questa
superficie possiamo trovare sia regioni a geometria ellittica sia regioni a geometria iperbolica. Per
discriminare le due geometrie ricorreremo alla studio delle somme angolari per un poligono
tracciato sulla superficie. Ricordiamo, a questo proposito, che nel piano euclideo la somma s degli
angoli, misurati in radianti, di un poligono con n lati è data da
s = (n - 2) π
La situazione ellittica è invece caratterizzata dalla
disuguaglianza
s > (n - 2) π
(ove s indica sempre la somma degli angoli) e infine quella iperbolica dalla disuguaglianza
s < (n - 2) π
E' chiaro che l'uguaglianza e le due disuguaglianze precedenti discendono tutte dal fatto che la
somma degli angoli di un triangolo è, nel caso ellittico, maggiore di π, nel caso euclideo uguale a π,
nel caso iperbolico minore di π. Un poligono su una superficie è naturalmente limitato da archi
geodetici (così come nel piano euclideo è limitato da segmenti). Ora nel caso della superficie di un
toro (figura 1) l'individuazione di poligoni (e la valutazione di angoli) è un problema che non
possiamo affrontare utilizzando le sole tecniche
elementari
considerare
di
cui
una
disponiamo.
Possiamo
però
superficie
topologicamente
equivalente a quella del toro che in qualche modo ne
conservi le caratteristiche globali di curvatura ma che
sia
più
facile
da
studiare.
Prenderemo
in
considerazione il solido a facce piane con un foro
centrale che vedete in figura 2. Sul solido è stato
tracciato, in rosso, un triangolo ABC. Attenzione,
dovete essere convinti che si tratta di un triangolo intrinseco; i tre lati AB, BC, CA sono archi
geodetici. Il triangolo, come vedete, ha tre angoli retti. Siamo dunque in una situazione ellittica (s >
Pagina 81
Geometrie non euclidee
Mario Sandri
π); non ce ne meravigliamo perchè si intuisce che il triangolo si trova in una regione del solido che
corrisponde ad una regione del toro in cui la curvatura è positiva. Ma osservate il quadrilatero
DEFG tracciato in giallo (è un rettangolo intrinseco): si trova anch'esso in una regione del solido
che corrisponde ad una regione del toro a curvatura positiva, tuttavia qui la somma s degli angoli è
2π e siamo quindi in una situazione euclidea. Osservate inoltre che all'interno del poligono giallo
non ci sono vertici del solido. Potremmo allora ipotizzare che la curvatura del nostro solido si
concentri tutta nei vertici (mentre nel caso del toro la curvatura si distribuisce su tutta la superficie).
Ci si convince, con qualche esperimento, che le cose stanno proprio così. Proviamo ad esempio a
considerare un poligono sulla superficie che contenga al suo interno un vertice del solido in cui
deve concentrarsi curvatura negativa (uno degli 8 vertici che circondano internamente il foro).
Osservate il pentagono ABCDE (in celeste) in figura 3. La somma degli angoli è pari a 5 angoli
retti, cioè s = 5π /2 < 3π. Come ci aspettavamo, siamo in una situazione iperbolica.
E' poi evidente che per un poligono interamente situato all'interno di una faccia del solido, come il
rettangolo giallo che vedete sempre in figura 3, la somma degli angoli verificherà l'uguaglianza
euclidea (siamo all'interno di una faccia piana, a curvatura zero). Possiamo allora concludere che
sul nostro solido, in cui la curvatura positiva o negativa si concentra nei vertici, troviamo dei
poligoni per cui i valori di s rientrano in ciascuno dei tre casi di cui si è detto; è anche facile capire
che il valore di s è determinato dalla presenza (o meno) di vertici del solido all'interno del poligono
stesso (e naturalmente dal tipo di vertici: ce ne sono 8, quelli esterni, in cui si concentra curvatura
positiva e 8, quelli interni, in cui si concentra curvatura negativa). Torniamo al toro. Qui la
curvatura non si concentra solo in alcuni punti ma si distribuisce su tutta la superficie e varia con
continuità; si intuisce, pertanto, che ogni poligono tracciato sulla superficie mostrerà, rispetto alla
formula euclidea, un eccesso angolare (situazione ellittica) o un difetto angolare (situazione
iperbolica). E ciò dipenderà dal tipo di curvatura della regione contenuta al suo interno.
Pagina 82
Geometrie non euclidee
Mario Sandri
IL MODELLO DI POINCARÉ
Di seguito viene proposto un esempio di costruzione di un modella della geometria non euclidea ed
in particolare per quella iperbolica utilizzando il programma Cabri-Géomètre. Il Cabri-Géomètre è
utilizzato quasi esclusivamente per esplorare situazioni euclidee. Con l’ausilio delle opzioni di
Cabri è possibile estendere il suo dominio di applicazione alla geometria non-euclidea. Il problema
da affrontare, allora, è quello di interpretare i concetti primitivi della geometria non euclidea
iperbolica in altrettante costruzioni euclidee da realizzare sul Cabri.
1. Si costruisca un punto a piacere
2. Si costruisca un altro punto a piacere non coincidente col primo
3. Si costruisca una circonferenza centrata nel primo punto e passante per il secondo
4. Si chiami la circonferenza ottenuta Orizzonte
5. Si costruisca un punto all’interno del cerchio non coincidente con il centro
6. Si chiami tale punto A
7. Si costruisca un punto all’interno del cerchio non coincidente con nessun punto precedente
8. Si chiami tale punto B
9. Si costruisca il segmento iperbolico tra A e B
10. Si costruisca un punto all’interno del cerchio non coincidente con nessun punto precedente
11. Si chiami tale punto C
12. Si costruisca il segmento iperbolico tra B e C
13. Si costruisca il segmento iperbolico tra A e C
14. Si tracci la perpendicolare iperbolica per il punto A
15. Si tracci la perpendicolare iperbolica per il punto B
16. Si tracci la perpendicolare iperbolica per il punto C
17. Si scriva il titolo: Il modello di Poincaré per la geometria iperbolica:
I Punti sono i punti euclidei interni al cerchio chiamato "orizzonte"
Le Rette sono gli archi di circonferenze fra due punti che intersecano
perpendicolarmente l'orizzonte.
18. Si scriva: Sposta A, B e C e osserva la somma degli angoli del triangolo iperbolico.
Sposta l'orizzonte e osseva la forma del triangolo iperbolico.
Inoltre: se si sposta l'orizzonte all’infinito, si ritorna alla geometria euclidea. Se il
centro dell'orizzonte si sposta all’infinito, si realizza il modello del semipiano per
la geometria iperbolica.
Pagina 83
Geometrie non euclidee
Mario Sandri
Il modello di Poincaré per la geometria iperbolica:
I Punti sono i punti euclidei interni al cerchio chiamato "orizzonte"
Le Rette sono gli archi di circonferenze fra due punti che intersecano perpendicolarmente l'orizzonte.
orizzonte
A
Sposta A, B e C e osserva la somma degli angoli del triangolo
iperbolico.
Sposta l'orizzonte e osseva la forma del triangolo iperbolico.
Inoltre: se si sposta l'orizzonte all' _, si ritorna alla geometria
euclidea. Se il centro dell'orizzonte si sposta all' _, si realizza il
modello del semipiano per la geometria iperbolica.
B
C
Pagina 84
Geometrie non euclidee
Mario Sandri
METODOLOGIE DIDATTICHE
Le strategie didattiche che si intendono adottare sono prevalentemente la lezione frontale,
limitata ad una breve parte dell’ora di lezione per sfruttare al meglio i tempi di attenzione, la lezione
interattiva che stimoli gli allievi a porre e a porsi domande, a collegare situazioni e a ricercare
soluzioni.
Per la presentazione dei nuovi contenuti e per lo svolgimento di esercizi significativi si farà uso
di lezioni frontali; per la risoluzione di ulteriori esercizi in collaborazione insegnate-allievi si farà
uso invece di lezioni dialogiche, con lo scopo di coinvolgere gli studenti nella realizzazione delle
lezioni, sollecitandoli con opportune domande. I momenti di lezione frontale e dialogica non
saranno rigidamente distinti, ma si potranno alternare nell’ambito della stessa ora di lezione. Alla
presentazione di ogni nuovo concetto o metodo di risoluzione di problemi, seguirà lo svolgimento
di esempi numerici. Talvolta sarà più opportuno partire da esempi significativi per giungere alla
formulazione di proprietà generali. Inoltre la correzione in classe degli esercizi farà da spunto per
nuove riflessioni e argomentazioni.
Una parte del monte ore dedicato alla seguente unità didattica verrà affrontata nel laboratorio di
informatica, dove gli studenti creeranno e poi utilizzeranno un programma di geometria chiamato
Cabri-Géomètre che illustrerà loro il comportamento di un modello iperbolico di geometria, nello
specifico quello di Poincaré.
MATERIALI E STRUMENTI UTILIZZATI
•
Lavagna, gessi colorati
•
Libro di testo. Questo strumento dovrà presentare un linguaggio adeguato all’età,
evidenziare i nodi concettuali evitando nel contempo pericolose banalizzazioni, sostenere
uno studio individuale e le attività in classe. Il testo andrà usato in modo critico, adattandolo
ed eventualmente semplificandolo, cercando un punto di contatto tra gli obiettivi della
programmazione in classe e le abilità possedute dagli alunni. La difficoltà di un testo può
essere legata ai contenuti, alle operazioni cognitive, agli aspetti linguistici o agli aspetti
grafici. Per questo motivo, spesso emerge la necessità di completare, ridurre, schematizzare
ed evidenziare quanto contenuto nel testo.
•
Personal computer. Sarà indispensabile che ogni alunno abbia la possibilità di lavorare su un
singolo PC per evitare che alcuni ragazzi non lavorino affatto. Sarà importante verificare la
loro conoscenza del programma Cabri-Géomètre. A seguito di possibili carenze verrà inoltre
aggiunto un piccolo intervento di recupero.
Pagina 85
Geometrie non euclidee
Mario Sandri
CONTROLLO DELL’APPRENDIMENTO
L’insegnante potrà valutare l’andamento dell’attività didattica e controllare la comprensione
dell’argomento da parte degli alunni attraverso verifiche formative costituite da esercizi mirati, di
difficoltà crescente, da svolgere a casa. Tali esercizi saranno successivamente discussi in classe,
puntando principalmente su quelli in cui gli studenti hanno riscontrato maggiori difficoltà.
VALUTAZIONE
La valutazione dell’apprendimento si attua attraverso prove orali.
RECUPERO E APPROFONDIMENTO
Si prevedono attività di recupero per integrare e completare l’attività didattica. L’insegnamento
è in ogni caso orientato alla continua ripresa degli argomenti su cui gli studenti incontrano maggiori
difficoltà. Gli argomenti da recuperare sono individuati attraverso le prove orali. Le forme di
recupero previste sono:
•
Recupero svolto in classe attraverso la ripresa di concetti non ben assimilati e lo
svolgimento di esercizi chiarificatori;
•
Attività pomeridiane con gli studenti interessati (“sportello” e ”ascolto didattico”);
•
Assegnazione allo studente di esercizi mirati alla difficoltà da recuperare e guidati nella
risoluzione.
TEMPI DELL’INTERVENTO DIDATTICO
Viene proposta una descrizione del susseguirsi delle attività didattiche con i tempi necessari a
ciascuna attività. Questa proposta va comunque considerata in maniera elastica, in quanto l’attività
dipende molto dalle esigenze degli studenti.
Accertamento dei prerequisiti
1h
Storia delle geometrie non euclidee
2h
La geometria sulla sfera
4h
Il modello di Poincaré
1h
Esempi ed esercizi
2h
Prove orali
Pagina 86
Geometrie non euclidee
Mario Sandri
BIBLIOGRAFIA
Carl B. Boyer - Storia della matematica - Mondadori
Roberto Bonola - Geometria non euclidea - Zanichelli
P. A. Giustizi - Da Euclide ad Hilbert - Bulzoni
H. Meschkowski - Mutamenti nel pensiero matematico - Boringhieri
Lorenzo Magnani - Le geometrie non euclidee - Zanichelli
Morris Kline - Storia del pensiero matematico - Einaudi
Richard Courant - Herbert Robbins - Che cos’è la Matematica - Universale Scientifica
Boringhieri
Federigo Enriques - Questioni riguardanti le matematiche elementari -Zanichelli
Evandro Agazzi - Dario Palladino - Le Geometrie non Euclidee - EST Mondatori
Walter Maraschini - Mauro Palma - Format, spe - Paravia
Pagina 87