PROGRAMMA ELETTRONICA
CLASSE V
ANNO 2009/2010
I MODULO: CONVERTITORI
u.d. 1: Convertitore di tensione-corrente
u.d. 2: Convertitore corrente-tensione
u.d. 3: Convertitore analogico-digitale e digitale
II MODULO: RADRIZZATORI E SISTEMI DI CONTROLLO
u.d. 1: Raddrizzatori di precisione
u.d. 2: Sistemi di controllo
u.d. 3: Sistema di controllo di temperatura
III MODULO: ONDE E GENERATORI
u.d. 1: Oscilattore
u.d. 2: Generatore di onda quadra e triangolare
u.d. 3: Multivibratori
u.d. 4: Timer 555
u.d. 5: Multivibratore astabile con NE 555
u.d. 6: Multivibratore monostable con timer 555
IV MODULO: ELETTRONICA DI POTENZA
u.d. 1: Motore in corrente continua
u.d. 2: Dinamo
u.d. 3: Tiristori SCR
u.d. 4: Triac
u.d. 5: GTO
u.d. 6: Transistor IGBT
u.d. 7: Regolazione di potenza PWM
I MODULO
U.D. 1: CONVERTITORE TENSIONE – CORRENTE
Il convertitore tensione-corrente è un circuito in grado di mantenere
costante la corrente in uscita al variare del carico applicato e facendola
dipendere dalla sola tensione applicata in ingresso.
Circuito del convertitore tensione-corrente
Nel circuito di sopra la corrente nel carico Ru dipende solo dalla tensione
applicata in ingresso vi. Quindi la corrente iu dell'utilizzatore sarà costante
al variare del carico Ru, entro un certo campo di valori di Ru partendo da
zero.
Infatti se poniamo Ru=0, il resistore R4 risulta in corto e quindi tutta la
corrente di R3 va in Ru; ma su R3 vi è una tensione pari a quella di R2, in
quanto il morsetto invertente si trova a massa virtuale; quindi v3=v2.
La corrente
La v2 la possiamo calcolare in funzione della vi
l'amplificatore è in configurazione invertente, quindi:
sapendo che
Quindi la
Cioè la iu non dipende da Ru ma solo da vi.
Se nel carico Ru vi è un aumento di tensione la variazione di corrente
avverrà in R3 e non in Ru; in R4 si avrà una corrente
se indichiamo con vA la tensione nel punto A, che è uguale a quella ai
capi di R4; corrente che andrà a spese di R3
In pratica la
Essendo la tensione al punto A applicata al morsetto non invertente essa
sarà amplificata del valore:
per cui la v2 può essere anche uguale a:
Uguagliando le due equazioni di v2 otteniamo:
da cui otteniamo:
e quindi:
ricordando che:
otteniamo che iu diventa:
quindi la iu non dipende da Vu o da VA ma dipende dalla sola R4 e da vi.
Il circuito, allora, mantiene costante la corrente sul carico al variare della
tensione del carico stesso.
U.D. 2: CONVERTITORE CORRENTE – TENSIONE
Il convertitore corrente-tensione è un circuito che mi dà in uscita una
tensione che è proporzionale alla corrente ricevuta in ingresso. Di
conseguenza la tensione in uscita non dipende dal carico ma dipende
dalla sola corrente in ingresso.
Convertitore corrente-tensione
Il generatore in ingresso lo schematizziamo secondo il modello di Norton,
cioè con un generatore di corrente Ii, con in parallelo una unica resistenza
equivalente Ri.
Essendo il morsetto invertente a massa virtuale, tutta la corrente del
generatore di corrente, che si trova in corto circuito, arriva sul morsetto
invertente; ma essendo nulla la corrente assorbita dallo stesso morsetto
invertente, la corrente di corto circuito icc va interamente in R2.
La tensione ai capi di R2, cioè v2, è uguale alla tensione vu disponibile sul
carico, essendo R2 tra morsetto di uscita e carico.
Quindi:
vu=v2= - R2 icc
Questa equazione ci dice che la tensione nel carico non dipende dalla
corrente del carico ma dalla sola corrente di ingresso icc; quindi è un
circuito convertitore corrente-tensione.
U.D. 3: CONVERTITORE ANALOGICO – DIGITALE E
DIGITALE
Ricordiamo,brevemente, il concetto di grandezze analogiche e grandezze
digitali.
Differenza tra tensione analogica e tensione digitale
Una grandezza, tensione o corrente, si dice analogica quando al variare
del tempo può essere rappresentata mediante una funzione continua,
senza punti di discontinuità.
Una grandezza si dice digitale quando viene rappresentata mediante un
sistema binario costituito da valori 0 ed 1.
In genere tutte le apparecchiature elettroniche od elettriche tradizionali
sono analogiche, cioè hanno tensioni o correnti che variano con
continuità nel tempo, come lampade, elettrodomestici, apparecchi radio e
televisivi.
Le apparecchiature moderne, poiché hanno al loro interno un
microprocessore che funziona solamente nel sistema binario, sono per lo
più apparecchiature digitali.
Ed è proprio la presenza del computer che ci costringe ad usare i
convertitori analogici-digitali e digitali-analogici.
Sistema di controllo digitale
lnfatti la impossibilità di avere computer di tipo analogico ci costringe ad
utilizzare i convertitori in modo da passare da un segnale analogico ad un
segnale digitale; unico segnale in grado di essere elaborato mediante un
microprocessore.
Si dice convertitore analogico-digitale (in sigla ADC: analogic digital
converter) un circuito in grado di convertire una grandezza analogica in
una grandezza digitale.
Si dice convertitore digitale-analogico (in sigla DAC: digital analogic
converter) un circuito in grado di convertire una grandezza digitale in una
grandezza analogica.
Un problema fondamentale che si incontra nella conversione di una
grandezza analogica nella corrispondente grandezza digitale è quello
dovuto al fatto che la grandezza analogica è costituita da un insieme
infinito di valori e per ogni istante di tempo esiste uno ed uno solo valore
diverso dagli istanti precedenti e successivi. Nel sistema digitale, invece, i
valori binari, essendo costituiti da 0 o da 1, costituiscono un sistema
discontinuo di valori, con perdita di qualità nella conversione.
Conversione analogico-digitale a 3 bit
Per poter avere una maggiore precisione occorre dividere il valore di
tensione in un numero di parti molto elevato; il potere risolutivo dipende
dal numero di bit utilizzati. In particolare se indichiamo con n il numero
di bit utilizzati, nella figura sono 3, i possibili livelli di tensione sono:
2n
Per n=3 si ha
23=8
livelli di tensione, da 0 a 7 in decimale, e da 000 a 111 in binario.
II MODULO: RADRIZZATORI E SISTEMI DI
CONTROLLO
U.D. 1: RADDRIZZATORI DI PRECISIONE
Il circuito raddrizzatore normale, che abbiamo considerato,
Comune circuito raddrizzatore ad una semionda
non è adatto per raddrizzare piccoli segnali, in quanto esiste la tensione di
soglia Vg che da un lato non fa rilevare le piccole tensioni e dall'altro
altera i valori alle tensioni più alte,
la semionda in uscita è errata di un valore vg
in quanto occorre sempre detrarre da ogni valore di tensione il valore
della tensione di soglia Vg ; di conseguenza la caratteristica di
trasferimento non è lineare.
caratteristica di trasferimento di un raddrizzatore normale
Quando il segnale in ingresso è molto elevato questi inconvenienti
risultano trascurabili; non possiamo, invece, farlo quando abbiamo a che
fare con segnali di ingresso molto piccoli. Dobbiamo, quindi, fare ricorso
ai raddrizzatori di precisione.
Raddrizzatore di precisione
Nei raddrizzatori di precisione le prestazioni migliorano. Nel circuito si
vede come l'operazionale è collegato nella configurazione di inseguitore
di tensione; il diodo entra in conduzione non quando la vi supera la
tensione di soglia vg, ma quando la
Essendo Av il guadagno di tensione a catena aperta, che, ricordiamo, per
il mA741 è circa 200.000
La tensione di soglia da 0,6 V si riduce allora a
Nel raddrizzatore di precisione la caratteristica
trasferimento reale coincide con quella ideale
di
Anche la caratteristica di trasferimento diviene ora più precisa, in quanto
si comporta come una retta.
Raddrizzatore amplificatore invertente di precisione
Questo circuito, tuttavia, raddrizza ma non amplifica la tensione in
ingresso.
Volendo possiamo utilizzare il seguente circuito:
Durante la semionda negativa dell'ingresso si ha in uscita
all'operazionale, collegato in configurazione invertente, una semionda
positiva, che manda in conduzione il diodo D2. La tensione in uscita
risulta amplificata del rapporto
;
quindi:
Caratteristica di trasferimento
Durante la semionda positiva dell'ingresso il diodo D2 risulta interdetto,
in quanto l'operazionale sfasa di 180°, quindi la semionda positiva non
passa; essa, però, potrebbe passare tramite R2; ma il diodo D1 conduce,
mettendo in corto circuito R2, ovvero riducendo a zero il guadagno
complessivo, durante la semionda positiva. Quindi la semionda positiva
non passa.
Questo circuito resta un raddrizzatore di precisione ad una semionda.
Volendo un raddrizzatore a doppia semionda, possiamo utilizzare il
seguente circuito.
raddrizzatore amplificatore invertente a doppia semionda
Il primo stadio è costituito da un raddrizzatore di precisione ad una
semionda, mentre il secondo stadio è costituito da un circuito sommatore.
Il valore dei resistori viene scelto opportunamente in modo tale che il
guadagno del primo stadio sia unitario; quindi poniamo:
R1=R2=R3=R5=R
Mentre per il circuito sommatore, poiché dobbiamo ottenere una
amplificazione doppia della tensione presente nel punto A, scegliamo
Durante la semionda positiva del segnale di ingresso vi, l'uscita del primo
operazionale è negativa, essendo in configurazione invertente; di
conseguenza il diodo D2 è polarizzato direttamente e la semionda
negativa la ritroviamo nel punto A.
Durante la semionda negativa del segnale di ingresso il diodo D2 è
polarizzato inversamente; quindi sul punto A la tensione è nulla; il diodo
D1 mette in corto circuito il resistore R2, per cui il guadagno è nullo.
Questo ci assicura che il segnale non arrivi nel punto A tramite R2.
Sul circuito sommatore arrivano contemporaneamente due segnali; il
primo è la vi che viene dall'ingresso; essa tramite il resistore R3 viene
applicata sul morsetto invertente del secondo operazionale ed amplificata
del rapporto:
che volutamente abbiamo scelto uguale a -1, in modo che venga solo
sfasato. Il segnale di ingresso arriva sia durante la semionda positiva che
durante la negativa; quindi il contributo che il segnale di ingresso dà alla
uscita, cioè vui è una intera onda, ma sfasata di 180° rispetto alla vi e non
amplificata.
forme d'onda
Contemporaneamente sul sommatore arriva un segnale che proviene dal
punto A, che è costituito da tutte semionde negative, che in origine erano
le semionde positive di vi; tali semionde negative vengono sfasate ed
amplificate del doppio; per cui il contributo alla tensione di uscita che dà
il punto A, cioè vuA, è un segnale costituito da semionde positive,
amplificate del doppio rispetto al segnale di ingresso. Tuttavia ad ogni
doppia semionda positiva di vuA corrisponde istante per istante, il
contributo di vui, che è una semionda negativa pari al segnale di ingresso
vi; per cui, sottraendo istante per istante a vuA il valore di vui, otteniamo
una semionda positiva, pari e contemporanea alla semionda positiva della
vi.
Durante la semionda negativa di vi, il contributo sull'uscita del punto A è
nullo, per cui ci ritroviamo in uscita il solo valore del contributo di vui,
che rappresenta la vi sfasata di 180°, e, quindi, una semionda positiva.
In definitiva l'uscita è un raddrizzatore a doppia semionda.
Questo raddrizzatore non amplifica la tensione di ingresso; volendo,
invece, amplificarla del valore Av, dobbiamo porre i seguenti valori di
resistori:
R1=R2=R3=R
R5=Av . R
In tal modo il segnale di uscita sarà amplificato del valore Av, rispetto al
segnale di ingresso.
Particolare cura deve essere data nella precisione dei resistori, cioè
dobbiamo prendere resistori a bassa tolleranza, in modo che le due
semionde positive siano perfettamente uguali.
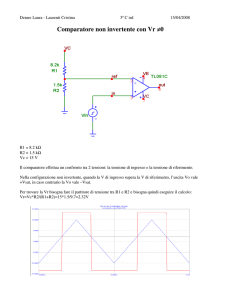
U.D. 2: SISTEMI DI CONTROLLO
TRIGGER DI SCHMITT
Il trigger di Schmitt è un comparatore con isteresi che ha tensione di
riferimento diversa da zero; per ottenere ciò si aggiunge in serie al resistore
R1 un generatore di tensione, secondo lo schema seguente:
In tale schema notiamo il generatore V in serie al partitore costituito da R1
ed R1, con lo scopo di generare sul morsetto invertente la tensione di
riferimento, che calcoliamo nel seguente modo. Quando la tensione in uscita
Vu assume il valore zero, cioè Vu = 0 , e quindi è come se l'uscita fosse
collegata a massa, sul punto A è presente una tensione che coincide con la
tensione ai capi di R2, cioè
VA = V
R2
R1 + R2
Di conseguenza la tensione di riferimento a livello alto, cioè VRA sarà:
VRA = VA +
Vu R1
R1 + R2
Invece, la tensione di riferimento a livello basso VRB sarà:
VRB = VA - Vu R1
R1 + R2
La caratteristica di trasferimento del trigger di Schmitt sarà la seguente:
Il sistema di controllo è un insieme di circuiti elettronici ed elettrici in grado
di tenere sotto controllo una determinata grandezza fisica, come la
temperatura, la pressione, uno spostamento. In pratica si fissa un certo
andamento che la grandezza deve avere nel tempo e si realizzano i circuiti in
modo che tale andamento avvenga nel tempo come previsto. Lo schema a
blocchi di un generico sistema di controllo può essere il seguente:
In tale schema notiamo il trasduttore, che ha il compito di trasformare la
grandezza fisica in una tensione o in una corrente elettrica. Sono trasduttori:
il termostato e il termistore, che variano la propria resistenza al variare
della temperatura; la dinamo tachimetrica, che dà una tensione variabile
con la velocità dell'asse di rotazione. Il comparatore, che ha il compito di
confrontare la tensione di uscita dal trasduttore VT con la tensione di
riferimento VR. La tensione VR rappresenta quello che deve essere
l'andamento della grandezza fisica al variare del tempo; in pratica quando si
vuole che la grandezza fisica aumenti, si aumenta il valore di VR e
viceversa. In uscita dal comparatore di tensione avremo una tensione
positiva o nulla. Cioè, se in un dato istante la grandezza fisica ha il valore
previsto da VR, il trasduttore mi dà in uscita una VT = VR, e quindi il
comparatore mi dà in uscita tensione nulla, e quindi l'attuatore non verrà
alimentato; se invece la grandezza fisica in un dato istante è inferiore a
quella prevista da VR, si avrà una VT inferiore a VR e quindi il comparatore
mi darà in uscita una tensione positiva, in modo da alimentare l'attuatore.
L'attuatore è un dispositivo che trasforma la corrente elettrica in grandezza
fisica. Sono attuatori: resistenze di riscaldamento, motori elettrici, ecc.
U.D. 3: SISTEMA DI CONTROLLO DELLA
TEMPERATURA
Si dice sistema di controllo della temperatura un circuito in grado di
mantenere alla temperatura stabilita un determinato ambiente, che può
essere un forno elettrico o una stanza. Un circuito semplice può essere il
seguente:
Nel circuito notiamo che il PTC è un componente che varia la sua
resistenza al variare della temperatura; di conseguenza mettendo il PTC
nel forno esso rileva la temperatura del forno; se la temperatura del forno
aumenta, si avrà un aumento della resistenza del PTC; se invece la
temperatura del forno diminuisce, si ha una diminuzione della resistenza
del PTC. Poiché il PTC è inserito in serie al resistore R1, che è di valore
fisso, in modo da formare un partitore di tensione, quando aumenta la
resistenza del PTC, si ha anche un aumento di tensione ai capi del PTC, e
quindi anche al morsetto invertente del comparatore; quando invece
diminuisce la resistenza del PTC si ha una diminuzione della tensione ai
capi del morsetto invertente. Per generare la tensione di riferimento
utilizziamo un resistore e un diodo Zener, polarizzato inversamente.
Quindi, R2 ha il compito di polarizzare il diodo DZ, il quale mantiene
costante la sua tensione, che viene applicata in ingresso al morsetto non
invertente del comparatore di tensione. Il comparatore confronta le due
tensioni di ingresso; se le due tensioni sono uguali l'uscita del
comparatore sarà Vu = 0, e quindi la base del transistor ha tensione nulla,
cioè VB = 0; e quindi il transistor non conduce; se invece la temperatura è
inferiore al valore stabilito, la tensione sul morsetto invertente sarà
inferiore a quella del diodo DZ, e il comparatore mi dà in uscita una
tensione positiva, polarizzando direttamente la base del transistor T che
va in saturazione. Il resistore RC rappresenta una resistenza di
riscaldamento del forno; in pratica maggiore è la corrente di RC maggiore
sarà il suo riscaldamento. Però la corrente del resistore RC coincide con la
corrente di collettore del transistor IC; in definitiva il transistor regola la
corrente di riscaldamento del resistore RC .
III MODULO: ONDE E GENERATORI
U.D. 1: OSCILLATORE
Si dice oscillatore un circuito in grado di generare una forma d'onda
qualsiasi, senza alcun segnale applicato in ingresso.La forma d'onda
generata ha una certa ampiezza VM, che si misura in Volt, una certa
frequenza f, che si misura in Hertz, e un certo periodo T, che si misura in
secondi. Ricordiamo che tra frequenza e periodo esiste la seguente
relazione:
f= 1
T
Cioè la frequenza è l'inverso del periodo.Può essere utile il seguente
diagramma:
Un generatore si dice sinusoidale se genera una forma d'onda di tipo
sinusoidale, come il diagramma superiore.
Un generatore si dice triangolare se genera una forma d'onda di tipo
triangolare, come il seguente:
Un generatore si dice d'onda quadra se genera una forma d'onda quadra o
rettangolare come il seguente:
Un oscillatore si dice a frequenza audio se genera una forma d'onda udibile
dall'orecchio umano, e cioè fino ad una frequenza f = 20 kHz. Un oscillatore
si rice a radio frequenza se genera frequenze superiori a 20 kHz.
U.D. 2: GENERATORE D’ONDA QUADRA E
TRIANGOLARE
Vediamo ora un circuito in grado di generare una forma d'onda di tipo
rettangolare, come il seguente:
Fondamentale in tutti gli oscillatori è la presenza di un amplificatore di
tensione e di una reazione positiva, cioè occorrono uno o più
componenti che prendono parte del segnale di uscita e lo riportino in
ingresso ad un amplificatore però in fase, in modo che il segnale, anche
se pur piccolo venga amplificato e lo si ritrovi in uscita con ampiezza
sempre maggiore, si dice così che l'amplificatore oscilla, cioè genera una
oscillazione. Nel nostro caso l'amplificatore è di tipo con operazionale e
funziona da comparatore con isteresi. Infatti i resistori R1 ed R2
costituiscono un partitore di tensione. Supponiamo che i due resistori
siano uguali, cioè R1 = R2; quando l'amplificatore va in saturazione si ha
che vu = VCC e quindi la tensione di riferimento a livello alto sarà:
VRA= VCC
R1
= VCC R1 = VCC
R 1 + R2
2R1
2
Inizialmente supponendo il condensatore C scarico si ha che vc<VRA e
quindi il comparatore va in saturazione positiva, vu=Vcc, ed il
condensatore inizia a caricarsi attraverso il resistore R. La tensione sul
condensatore sarà data dalla seguente formula:
t_
vC = vu ( 1 - e
- RC
)
dove t è l'istante di tempo considerato, misurato in secondi, e è il numero
di Nepero, e = 2,718; R è la resistenza misurata in Ohm, e C è il valore
della capacità del condensatore, misurata in Farad.
Quando il condensatore raggiunge una tensione pari a VRA, il
comparatore commuta, perché la tensione sul morsetto invertente è
maggiore di quella sul morsetto non invertente, cioè vc>VRA, l'uscita va
subito in saturazione negativa, cioè vu=-Vcc; il condensatore C è costretto
prima a scaricarsi e poi inizia a ricaricarsi, essendo sottoposto, tramite R
ad una tensione uguale a -Vcc; intanto, essendo vu negativa, la tensione di
riferimento del comparatore si è portata a livello basso, cioè
VRB = - Vcc
2
Al passare del tempo la tensione del condensatore cresce in valore
negativo, sino a raggiungere il valore - VRB, cioè la tensione di
riferimento a livello basso; superato tale valore in senso negativo, si ha
che la tensione sul morsetto invertente è maggiore, sempre negativamente
di quella di VRB , e quindi il comparatore ritorna in saturazione positiva,
cioè vu = +Vcc ed il condensatore è costretto prima a scaricarsi e poi a
caricarsi con tensione positiva. Il ciclo si ripete all'infinito. Di
conseguenza le tensioni disponibili sono sia quella del condensatore vC
che quella di uscita vu, secondo i seguenti diagrammi:
Il periodo T lo possiamo calcolare con la seguente formula:
T = 2,2 RC
Mentre la frequenza f sarà:
f=
1 =
T
1
2,2 RC
In definitiva da questo oscillatore possiamo prelevare una forma d'onda di
tipo rettangolare, in quanto la tensione ai capi del condensatore non è
perfettamente triangolare. Volendo anche una tensione triangolare
possiamo ricorrere al seguente circuito:
In questo circuito notiamo una prima parte, a sinistra, costituita da un
circuito integratore che ricevendo in ingresso un'onda quadra dà in uscita
un'onda di tipo triangolare, mentre la seconda parte del circuito è un
comparatore, che riceve in ingresso una forma d'onda triangolare e dà in
uscita una forma d'onda quadra, che viene applicata in ingresso al circuito
integratore.
Vediamo più in dettaglio il funzionamento del circuito. Supponiamo che
inizialmente l'uscita del comparatore si trovi in saturazione negativa, cioè
vu2=-Vcc, la tensione di riferimento a livello basso del comparatore sarà
VRB =
vu2 R1
R1+R2
Poiché però l'integratore sta ricevendo in ingresso una tensione negativa
vu2=-Vcc, genera in uscita una rampa crescente con tensione vu1. La
tensione della rampa si somma perciò con la tensione di riferimento VRB.
Di conseguenza la tensione applicata sul morsetto non invertente sarà:
v+ = vu1 - VRB
Quando le due tensioni saranno uguali e contrarie, il comparatore
commuta, e va in saturazione positiva, cioè vu2 = +Vcc, tale tensione vu2
viene applicata in ingresso all'integratore, che dà in uscita una rampa
negativa. Di conseguenza la tensione applicata al morsetto non invertente
sarà:
v+ = - vu1 + VRA
Dove VRA è:
VRA = vu2 R1
R 1 + R2
I diagrammi sono i seguenti:
Il periodo si può calcolare con la seguente formula:
T = 4 R C R1
R2
Se facciamo in modo che R2 = 4R1 il periodo diventa:
T = RC
U.D. 3: MULTIVIBRATORI
Si dice multivibratore un circuito in grado di generare in uscita una forma
d'onda di tipo rettangolare. Vi sono tre tipi di multivibratori. Multivibratore
monostabile, multivibratore bistabile, multivibratore astabile.
Un multivibratore si dice monostabile quando ha un solo stato stabile, cioè
normalmente l'uscita si trova a livello alto oppure a livello basso; quando
arriva un impulso dall'esterno il monostabile commuta, cioè se si trovava a
livello alto passa a livello basso; però finito l'effetto dell'impulso esterno,
torna nello stato precedente.
Un multivibratore si dice bistabile quando ha due stati stabili, cioè
normalmente l'uscita si trova a livello alto oppure a livello basso; quando
arriva un impulso dall'esterno il monostabile commuta, cioè se si trovava a
livello alto passa a livello basso e viceversa; finito l'effetto dell'impulso
esterno, rimane nello stato determinato dall'impulso.
Un multivibratore si dice astabile quando commuta continuamente dallo
stato alto a quello basso, senza ricevere impulsi dall'esterno.
Un semplice multivibratore astabile si può realizzare con le porte logiche,
come nel seguente circuito:
Come si vede vi sono due porte NOT, che danno in uscita un segnale
opposto a quello ricevuto al loro ingresso, collegate in modo che l'uscita di
una sia l'ingresso dell'altra.
Supponiamo che all'istante iniziale il condensatore C sia scarico. Il primo
NOT riceve uno zero logico in ingresso e dà in uscita sul punto B il valore
1. Il secondo NOT riceve 1 in ingresso e da in uscita zero. Il condensatore C
è costretto a caricarsi, col positivo verso il basso, tramite la resistenza R2.
Quando la tensione del condensatore è cresciuta fino a raggiungere il livello
logico 1, sul primo NOT viene applicato il livello logico 1, tramite R1, sul
punto A; sul punto B ottengo livello logico 0; in uscita ho livello logico 1. Il
condensatore C è costretto a scaricarsi e caricarsi con segno opposto, cioè
col positivo verso l'alto, riducendo la tensione sul punto A. Quando la
tensione sul punto A raggiunge lo 0 logico, il punto B si porta a 1, e l'uscita
a 0, riprendendo il ciclo iniziale. La forma d'onda in uscita sarà la seguente:
Per calcolare la frequenza, prima ci calcoliamo il periodo con la formula:
T1 = T2 = 1,1 R2 C
Dove T1 è il tempo in cui l'uscita si mantiene a livello alto; T2 è il tempo in
cui l'uscita si mantiene a livello basso.
Tale formula è valida per porte logiche tipo CMOS. Poi ci calcoliamo :
f= 1
T
U.D. 4: TIMER 555
Il timer è un circuito integrato complesso avente lo scopo di regolare per un
tempo prestabilito determinati circuiti. In pratica il timer 555 è un
temporizzatore. Nella seguente figura vediamo una vista esterna.
Lo schema a blocchi del circuito integrato è il seguente:
Possiamo notare tre resistori uguali da 5 k , aventi lo scopo di dividere la
tensione di alimentazione Vcc in tre tensioni multiple di 1/3 di Vcc; in fatti
tra il resistore inferiore e massa, cioè sul morsetto non invertente del
secondo comparatore, abbiamo una tensione pari a Vcc/3; tra il secondo
resistore e massa, cioè sul morsetto invertente del primo comparatore,
abbiamo una tensione pari a 2Vcc/3; infine sul terzo resistore dal basso
abbiamo tutta la Vcc. Tali tensioni ci servono come tensioni di riferimento
per i due comparatori interni.
Infatti vi sono due comparatori; il primo comparatore, quello superiore ha
una tensione di riferimento sul morsetto invertente pari a 2Vcc/3, mentre il
morsetto non invertente è disponibile all'esterno dell'integrato, sul piedino 6,
detto soglia. In pratica quando la tensione sul piedino 6 è maggiore di
2Vcc/3 l'uscita del primo comparatore si porta a livello logico alto, cioè 1;
quando, invece, la tensione sul piedino 6 è inferiore a 2Vcc/3 l'uscita del
primo comparatore si porta a livello basso, cioè zero.
Viceversa, il secondo comparatore , quello inferiore, ha una tensione di
riferimento sul morsetto non invertente pari a Vcc/3, mentre il morsetto
invertente è disponibile all'esterno dell'integrato, sul piedino 2, detto trigger.
In pratica quando la tensione sul piedino 2 è maggiore di Vcc/3 l'uscita del
secondo comparatore si porta a livello logico basso, cioè 0; quando, invece,
la tensione sul piedino 2 è inferiore a Vcc/3 l'uscita del secondo comparatore
si porta a livello alto, cioè 1.
Le uscite dei due comparatori sono applicate in ingresso ad un latch di tipo
S-R.
Il latch di tipo S-R è un circuito logico con due ingressi e due uscite. Un
primo ingresso, detto SET, cioè porre a 1, quando si trova a 1, obbliga
l'uscita Q a portarsi a 1; il secondo ingresso, detto RESET, cioè azzerare,
quando si trova a livello logico 1, porta l'uscita Q a zero, cioè l'azzera. La
tabella di verità è la seguente:
S
R
Q
Q
0
0
1
0
1
0
Q
0
1
Q
1
0
1
1
indeterminato
indeterminato
Nel timer 555 delle due uscite l'uscita Q non viene utilizzata, ma viene usata
solo l'uscita Q negato. Se Q negato si trova a livello alto, manda in
saturazione il transistor e quindi il piedino 7 viene collegato a massa,
permettendo la scarica di un condensatore, che di solito viene applicato al
piedino 7; se invece l'uscita Q negato si trova a livello basso il transistor è
interdetto, quindi il piedino 7 si trova isolato da massa, permettendo la
carica del condensatore. Sull'uscita Q negato è applicato un invertitore, che
trasforma l'uscita Q negato in uscita Q, ed inoltre permette una elevata
corrente in uscita. Il timer 555 può essere utilizzato sia come multivibratore
astabile, che come bistabile.
U.D. 5: MULTIVIBRATORE ASTABILE CON NE 555
Il multivibratore astabile è un circuito in grado di generare una forma d'onda
rettangolare, senza segnale applicato in ingresso. Lo schema elettrico è il
seguente:
Supponiamo che inizialmente il condensatore C sia scarico, gli ingressi dei
due comparatori sui piedini 2 e 6 si trovano a livello basso; il comparatore
superiore dà in uscita un livello basso, quindi R=0; il comparatore inferiore
dà in uscita un livello alto, quindi S=1; il latch S-R pone l'uscita Q a 1,
mentre Q negato = 0; l'uscita del timer, sul piedino 3 si trova a livello alto; il
transistor è interdetto, perché la base non è polarizzata direttamente, il
piedino 7 si trova isolato da massa, il condensatore C inizia a caricarsi
attraverso i resistori R1 ed R2 che si trovano in serie.
Quando la tensione ai capi del condensatore C raggiunge il calore di Vcc/3,
il comparatore inferiore commuta e si porta a livello basso, S=0; i latch S-R
non commuta perché anche R=0, e quindi la parte restante del circuito resta
nello stato precedente, ed il condensatore continua a caricarsi. Quando la
tensione ai capi del condensatore C raggiunge i 2Vcc/3 allora il comparatore
superiore commuta, portando la sua uscita a livello alto; R=1; il latch S-R
azzera la sua uscita Q; Q negato = 1; l'uscita dell'integrato si porta a livello
basso; il transistor va in saturazione, mettendo il piedino 7 del timer a
massa; il condensatore è costretto a scaricarsi attraverso il solo resistore R2.
Quando la tensione del condensatore C scende al di sotto di Vcc/3 allora il
comparatore inferiore commuta, portando S a 1, mentre R già era a zero
appena iniziata la scarica; quindi il latch S-R avendo S=1 porta la sua uscita
Q a 1, e Q negato a 0; l'uscita del timer si porta a livello alto; il transistor è
interdetto, il piedino 7 è staccato da massa, il condensatore inizia a
ricaricarsi, ripetendo il ciclo precedente.
I diagrammi sono i seguenti:
Trascurando il tempo iniziale di carica Ti, in cui il condensatore parte da
tensione zero, indichiamo con T1 il tempo in cui l'uscita si mantiene a livello
alto, ed il condensatore si carica; T1 lo possiamo calcolare con la seguente
formula:
T1 = 0,693 (R1+R2) C
Infatti il condensatore si carica attraverso R1 ed R2.
Indichiamo con T2 il tempo in cui l'uscita si mantiene a livello basso; T2 lo
possiamo calcolare con la seguente formula:
T2 = 0,693 R2 C
Sommando i due tempi T1 e T2 otteniamo l'intero periodo cioè
T = T1 + T2
La frequenza sarà l'inverso del periodo, cioè
f= 1
T
Si dice ciclo utile D il rapporto tra T1 e T, cioè
D=
T1
T
Notiamo che è difficile ottenere un ciclo utile pari al 50%, cioè T1 = T2, cioè
il tempo in cui la forma d'onda è a livello alto è uguale al tempo in cui la
forma d'onda è a livello basso; per ottenere questo dovremmo porre R2 = 0;
però R2 è la resistenza di collettore del transistor interno, che non può avere
valori inferiore a 1.000 , per evitare di bruciare il transistor. Per ottenere R2
= 0 si può mettere in parallelo ad R2 un diodo, secondo il seguente schema:
in tal modo durante la carica del condensatore C il diodo D è polarizzato
direttamente e si comporta come un corto circuito, il condensatore si carica
solo attraverso R1; durante la scarica del condensatore il diodo è polarizzato
inversamente, quindi è come un circuito aperto, permettendo al
condensatore di scaricarsi attraverso R2.
Il condensatore C1 serve come livellamento della tensione di riferimento. Il
morsetto di RESET va collegato a + Vcc, in modo da escluderlo.
U.D. 6: MULTIVIBRATORE MONOSTABILE CON
TIMER 555
Il multivibratore monostabile genera una forma d'onda rettangolare in uscita,
però ha bisogno di un impulso esterno per poterla generare. Lo schema
elettrico è il seguente:
Il monostabile ha un solo stato stabile, nel nostro caso l'uscita si mantiene
sempre a livello basso finché non arriva un impulso dall'esterno, sul piedino
2. Infatti mantenendo a livello alto il piedino 2, il comparatore inferiore dà
in uscita un valore basso; quindi S=0; invece il comparatore superiore,
essendo il condensatore inizialmente scarico, dà in uscita 0; quindi R=0;
quindi il latch S-R resta nella condizione di azzeramento, cioè Q=0; Q
negato =1; l'uscita del timer è zero; il transistor va in saturazione, essendo la
base polarizzata direttamente, il piedino 7 si trova a massa, ed il
condensatore C non si può caricare attraverso il resistore R1. Il circuito si
mantiene stabile con uscita a livello basso.
Quando arriva un impulso dall'esterno sul piedino 2, detto trigger, la
tensione sul piedino 2 si porta a zero, il comparatore inferiore dà in uscita un
livello alto; S=1; mentre R è rimasto a 0; immediatamente l'uscita Q del
latch S-R si porta a 1, mentre Q negato =0; l'uscita del timer si porta a 1; il
transistor è interdetto, il condensatore inizia a caricarsi attraverso il resistore
R1; quando la tensione sul condensatore raggiunge i 2Vcc/3 il comparatore
superiore commuta portando l'uscita a livello alto, quindi R = 1; mentre il
comparatore inferiore ha già dato l'uscita a livello basso non appena il
condensatore ha superato Vcc/3; quindi S = 0; l'uscita del latch S-R si
azzera, quindi Q = 0; Q negato = 1; l'uscita del timer si porta a livello basso;
il transistor va in saturazione scaricando il condensatore.
Il condensatore C1 serve come livellamento della tensione di riferimento. Il
morsetto di RESET va collegato a + Vcc, in modo da escluderlo.
I diagrammi sono i seguenti:
Indichiamo con T il tempo in cui il condensatore si carica, si ha che:
T = 1,1 R1C
IV MODULO: ELETTRONICA DI POTENZA
U.D. 1: MOTORE IN CORRENTE CONTINUA
Il motore in corrente continua è una macchina elettrica che trasforma in
movimento rotatorio la potenza elettrica assorbita dall'alimentazione.
Costituzione del motore in corrente continua
Se prendiamo due solenoidi, cioè due avvolgimenti di filo di rame
smaltato, e li alimentiamo tutti e due con una tensione continua, avviene
che ciascun solenoide si magnetizza, a seconda del verso di circolazione
della corrente. Cioè se voglio che il polo Nord del magnete sia verso
l'alto, faccio circolare una corrente continua con il polo positivo sulla
parte superiore del solenoide, e dispongo il solenoide in modo che le spire
sia avvolte in senso antiorario, viste dall'alto. Naturalmente il polo Sud si
troverà verso il basso.
Se, invece, nello stesso solenoide, con le spire avvolte in senso antiorario
viste dall'alto, fornisco una tensione negativa sulla parte superiore del
solenoide, allora il solenoide avrà il polo Sud verso l'alto e il polo Nord
verso il basso.
Mettendo due soloneidi, alimentati con tensione continua, nelle
immediate vicinanze, si manifestano tra di loro delle forze o di attrazione
o di repulsione; cioè di attrazione se i due poli sono contrari, cioè NordSud; di repulsione se i due poli sono uguali, cioè Nord-Nord oppure SudSud.
Se uno dei solenoidi lo avvolgo attorno ad un nucleo di materiale
ferromagnetico di forma cilindrica, cavo internamente, mentre l'altro
soleonide lo avvolgo sulla parte esterna di un cilindro più sottile, posto
internamente al primo, a causa delle azioni di attrazione o di repulsione, il
cilindro posto internamente è costretto a muoversi, e quindi a girare, nel
verso stabilito dai due poli.
Si chiama motore, appunto, un insieme di avvolgimenti e di nuclei di
materiale ferromagntico, che opportunamente alimentati, fanno mettere in
rotazione un albero, detto rotore.
La parte fissa del motore, si chiama statore, cioè sta fermo;
statore con i due poli magnetici Nord e Sud
la parte che gira, si chiama rotore, cioè può ruotare.
Rotore con avvolgimenti e collettore
Dei due avvolgimenti quello fisso sulla parte cilindrica che non può
ruotare, lo statore, si chiama avvolgimento di eccitazione; mentre l'altro
avvolgimento, posto sulla parte che può ruotare, cioè il rotore, si chiama
avvolgimento di armatura.
Collegare lo statore ad un generatore di tensione continua è molto
semplice, in quanto lo statore è fermo.
Più complesso è, invece, collegare il rotore ad un generatore di tensione
continua, in quanto appena il rotore inizia a ruotare si avvolge su di sè i
fili di collegamento dando luogo alla rottura dei fili stessi. Per evitare
questo si è utilizzato un sistema detto a collettore e spazzole.
Collettore a lamelle
In pratica sul rotore, si riempiono due solchi cilindrici di rame nudo,
isolati elettricamente dal nucleo di materiale ferromagnetico e tra di loro.
Su questi due anelli di rame si poggiano due elettrodi di grafite,
ricordiamo che la grafite è un conduttore, ed ha la proprietà di
autolubrificarsi. Questi elettrodi vengono chiamati spazzole.
Spazzole con molle
Occorrono quindi due spazzole, una collegata col polo positivo del
generatore di tensione; l'altra collegata col polo negativo del generatore di
tensione.
Collettore a contatto con le spazzole
Poggiando le spazzole sui due anelli e premendole con una molla, in modo
da avere un perfetto contatto elettrico, anche il motore gira, le spazzole
restano sempre collegate l'una con la parte superiore del solenoide, l'altra
con la parte inferiore. In tal modo il motore può ruotare e il rotore resta
sempre alimentato, senza rompere i fili.
Spinotto di alimentazione
Rotore con avvolgimenti
e collettore
Collettore a lamelle
Esterno di un motore in
continua
Spazzole con molle
Statore con i due poli magnetici a magnete permanente
Collettore a contatto
con le spazzole
Lo schema elettrico del motore in corrente continua è il seguente:
Indichiamo con Ve la tensione continua di alimentazione dell'avvolgimento
di eccitazione Le, cioè dell'avvolgimento che genera il flusso magnetico di
eccitazione Fe; tale avvolgimento si trova sulla parte fissa del motore, detta
statore. Indichiamo con Va la tensione continua di alimentazione del
secondo avvolgimento, detto avvolgimento di armatura che si trova sulla
parte del motore che ruota, detta la tensione continua di alimentazione del
secondo avvolgimento, detto avvolgimento di armatura che si trova sulla
parte del motore che ruota, detta rotore. Nel rotore circola una certa corrente
detta Ia, cioè corrente di armatura. Tra i due avvolgimenti, uno fisso e l'altro
libero di ruotare attorno ad un asse, si manifestano delle forze magnetiche di
attrazione o di repulsione, che fanno sì che il rotore si mette a ruotare,
essendo lo statore fermo. Poiché la forza che lo fa mettere in movimento ha
una certa distanza dall'asse di rotazione si genera una coppia motrice Cm che
fa ruotare il rotore. La formula per calcolare la coppia motrice è la seguente:
Cm = Ka Fe Ia
Cioè la coppia è direttamente proporzionale ad una costante Ka, che è
caratteristica di un motore una volta costruito e resta costante; è direttamente
proporzionale al flusso di eccitazione e alla corrente di armatura. In pratica
una volta costruito il motore, possiamo regolare la coppia motrice agendo o
sul flusso Fe oppure sulla corrente di armatura Ia. A causa del movimento
del rotore vi sono degli attriti tra rotore e cuscinetti che lo sostengono e tra
rotore e aria, indichiamo con Cr la coppia resistente che tiene conto di tutte
le forze che si oppongono al moto. In equilibrio si ha:
Cr = Cm
Se invece la coppia motrice è maggiore di quella resistente, cioè:
Cm > Cr
il motore accelera, cioè aumenta di velocità finché non si raggiunge
l'equilibrio e quindi
Cm = Cr
Se invece la coppia motrice è inferiore alla coppia resistente il motore
decelera, cioè rallenta la velocità.
Il movimento del rotore all'interno del flusso magnetico costante Fe, secondo
la legge di Farady - Neumann - Lenz genera all'interno del rotore una forza
elettromotrice E di verso opposto alla tensione di armatura Va, di
conseguenza l'equazione del circuito di armatura è:
Va = E + Ra Ia
Cioè la tensione di armatura è uguale alla somma forza elettromotrice E più
la caduta di tensione ai capi dell'avvolgimento di armatura, cioè RaIa, dove
con Ra abbiamo indicato la resistenza del filo che costituisce l'avvolgimento
di armatura.
Il valore di E lo calcoliamo con la seguente formula
E = Ka Fe n
Dove Ka è caratteristica del motore una volta costruito; Fe è il flusso dello
statore, n è la velocità del rotore in numero di giri al minuto.
Per calcolare la velocità n si usa la seguente formula:
Notiamo che gli avvolgimenti sia sul rotore che sullo statore sono più di
uno. Gli avvolgimenti dello statore è semplice collegarli perché non sono in
movimento. Quelli di rotore, essendo in movimento, non è semplice
collegarli, per cui si raggruppano sul collettore, che si trova sul rotore, ed è
costituito da una serie di lamelle di rame, ognuna collegata ad un capo di un
avvolgimento. Sul collettore premono delle spazzole di grafite che è un
materiale conduttore che si autolubrifica; le spazzole sono ferme e sono
collegate al generatore di tensione, hanno lo scopo di alimentare il rotore.
U.D. 2: DINAMO
Una dinamo è una macchina elettrica rotante per la trasformazione di
lavoro meccanico in energia elettrica, sotto forma di corrente continua
(DC, per gli inglesi, direct current) assumendo la funzione di trasduttore.
Descrizione
Una semplice costruzione di dinamo, costruttivamente identica ad un
motore DC.
Nella sua forma più semplice consiste di una spira conduttrice (rotore)
immersa in un campo magnetico (generato ad esempio da una coppia di
magneti permanenti, i quali formano lo statore) e messa in rotazione da
un albero. Per la legge di Faraday per l'induzione un conduttore che si
muove in un campo magnetico (purché non parallelamente ad esso) vede
nascere una forza elettromotrice indotta (fem); chiudendo quindi la spira
su un carico elettrico (ad esempio una lampadina, o un accumulatore) si
può misurare una corrente scorrere nella spira stessa e nel carico (la
lampadina
si
accende).
Se ci fermassimo qui, però, la dinamo non funzionerebbe, infatti fin qui la
corrente è tutt'altro che continua, infatti la differenza di potenziale nella
singola spira varia con legge sinusoidale con l'angolo di rotazione e
quindi cambia segno ogni mezzo giro (producendo corrente alternata). È
quindi necessario connettere i capi della spira ad un oggetto chiamato
"collettore" o "commutatore", calettato sul rotore e solidale ad esso, che,
attraverso un contatto strisciante con spazzole (dette carboncini), scambia
i capi della spira ogni mezzo giro mantenendo la tensione in uscita
sempre dello stesso segno.
Per motivi di corretto funzionamento ed efficienza energetica le
realizzazioni reali sono leggermente più complesse, prevedendo diverse
spire avvolte sul rotore lungo i 360° ognuna delle quali deve commutare i
propri capi ogni mezzo giro. Inoltre, per potenze superiori a pochi watt,
anche lo statore (quello che genera il campo magnetico) è "avvolto", cioè
il campo magnetico è prodotto da spire avvolte sui poli statorici,
all'interno delle quali scorre la corrente di induzione o di eccitazione.
Campi di utilizzo
Dinamo per bicicletta (in realtà è un alternatore)
Le dinamo sono oggi utilizzate soprattutto per le piccole potenze. La
dinamo è una macchina elettrica reversibile, ovvero può funzionare anche
come motore elettrico: se infatti si invia ai morsetti del collettore una
tensione continua la corrente che scorre nelle spire interagisce con il
campo magnetico di statore generando una forza (detta forza di Lorentz)
tangenziale su tutte le spire del rotore, causando la rotazione del rotore
stesso ovvero una coppia sull'albero di uscita. Questo è detto motore in
CC ed è utilizzato per potenze da pochi watt (nei modellini
radiocomandati e in tutti gli utensili ed elettrodomestici a batteria) fino ad
alcuni megawatt (in tutte le motrici ferroviarie escluse quelle di ultima
generazione, che utilizzano motori asincroni trifase).
Nota curiosa: si noti che la cosiddetta "dinamo" applicata alle biciclette è
in realtà un alternatore, in quanto produce corrente alternata.
Invenzione
L'origine del concetto di elettricità prodotta mediante moto si fa risalire a
quando nel 1831 Michael Faraday e Joseph Henry notarono che un
magnete spostandosi all'interno di un campo magnetico produceva
corrente elettrica. La prima dinamo basata sui principi di Faraday fu
costruita nel 1860 in Italia da Antonio Pacinotti. In Francia l'invenzione
della dinamo è attribuita a Zénobe Gramme e datata 1869. L'invenzione
di Pacinotti (anche detta anello di Pacinotti) viene considerata solo un
prototipo. La macchina era costituita da un magnete che veniva fatto
ruotare con una manovella. I poli nord e sud del magnete passavano
ripetutamente davanti a un pezzo di acciaio avvolto da un cavo elettrico,
producendo impulsi di corrente in direzioni opposte. Dopo l'aggiunta di
un convertitore, Pacinotti fu capace di trasformare la corrente alternata in
corrente continua. L'apparato fu chiamato dal suo inventore macchina
magnetoelettrica.
Nel 1870 l'accoppiamento della dinamo alla turbina idraulica diede avvio
alla produzione commerciale di energia elettrica.
U.D. 3: TRISTORI SCR
I tiristori sono dei componenti elettronici speciali utilizzati nell'elettronica
di potenza, cioè l'elettronica idonea per elevate tensioni ed elevate
correnti, cioè gli impieghi più comuni dell'elettronica di tipo industriale.
Illustreremo nel seguito il diodo controllato, detto SCR (Silicon
Controlled Rectifier), il TRIAC (Triode Alternate Current) e il GTO
(Gate Turn Off).
Diodo controllato SCR (Silicon Controlled Rectifier)
Il nome di SCR deriva dalla sigla Silicon Controlled Rectifier, cioè
raddrizzatori al silicio controllati.
struttura di un SCR
simbolo elettrico di un SCR
La struttura di un SCR è costituita da quattro strati di semiconduttore
drogati alternativamente PNPN, in modo da costituire tre giunzioni PN.
schema di un SCR con coppia di BJT
Un SCR può in tal modo considerarsi come costituito da due transistor
uno PNP e l'altro NPN collegati come la figura di sopra.
Se si polarizza l'anodo positivamente e il catodo negativamente il tiristore
non conduce se il gate non è polarizzato in quanto T2 risulta interdetto
essendo IB2=0.
Se invece applichiamo anche per un breve istante una tensione positiva
sul gate vi è una corrente IB2 che porta in conduzione il transistor T2. Tale
corrente di base viene amplificata del coefficiente hFE2, per cui:
IC2 = hFE2 IB2 = IB1
Per cui anche il transistor T1 entra in conduzione aumentando la sua
corrente di collettore:
IC1=hFE1 IB1= hFE1 hFE2 IB2
Tale corrente porta i due transistor in saturazione anche se viene meno la
corrente del gate.
SCR alimentato con tensione continua
Di conseguenza un SCR una volta innescato continua a condurre anche
senza tensione di gate, se la tensione applicata tra anodo è catodo è una
tensione continua.
SCR alimentato con tensione alternata
Se invece la tensione è di tipo alternato un SCR si disinnesca quando
arriva la semionda negativa. Inoltre se un SCR si alimenta inversamente
non conduce mai anche se polarizziamo il gate direttamente.
U.D. 4: TRIAC
Triodo per corrente alternata TRIAC (Triode Alternate Current)
Il nome di TRIAC deriva dalla sigla Triode Alternate Current, cioè triodo
(componente a tre elettrodi) per corrente alternata.
struttura di un TRIAC
simbolo elettrico di un TRIAC
Il TRIAC è simile ad un SCR ma conduce in entrambi i versi in quanto
può essere considerato come l'insieme di due SCR collegati in senso
opposto ma comandati da un solo gate.
L'innesco si può avere o con una tensione positiva del gate o con una
tensione negativa del gate; una volta innescato esso continua a condurre
sia se viene alimentato tra i due anodi con una tensione continua e sia se
viene alimentato con tensione alternata. Per poterlo spegnere occorre,
quindi, annullare la tensione tra i due anodi.
U.D. 5: GTO
Tiristore GTO (Gate Turn Off).
Il nome di GTO deriva dalla sigla Gate Turn Off, cioè gate con
spegnimento.
struttura di un GTO
simbolo elettrico di un GTO
Il GTO è simile ad un SCR ma si differenzia solo nel comportamento del
gate; infatti nel GTO con un impulso positivo sul gate si ottiene l'innesco;
mentre con un impulso negativo sul gate si ottiene lo spegnimento.
U.D 6: TRANSISTOR IGBT
Transistor bipolare con gate isolato IGBT (Insulated Gate Bipolar
Transistor).
E un particolare transistor bipolare che al posto della base ha un gate
isolato simile ai MOSFET, tipico lo IRG4BC20S della International
Rectifier.
simbolo elettrico di un IGBT
E' idoneo per controllare la velocità dei motori in corrente continua. Il
transistor passa in conduzione con un impulso positivo sul gate e vi resta
in conduzione anche se viene meno l'impulso positivo sul gate.
Per poterlo portare all'interdizione occorre applicare un impulso negativo
sul gate. Per cui mediante una oppurtuna serie di impulsi positivi e
negativi si ottiene un facile controllo di un motore in continua collegato
in serie sul collettore o sull' emettitore.
schema elettrico di un IGBT che pilota un motore in continua
Nello schema notiamo il motore in corrente continua M collegato sul
collettore di un IRG4BC20S. Il transistor funge da interruttore di potenza;
il tempo di conduzione è dettato dagli impulsi che arrivano sul gate; di
conseguenza la potenza e la velocità del motore possono essere regolati
mediante un opportuno treno di impulsi. La luminosità del LED è
proporzionale alla durata degli impulsi; il diodo D sopprime le
extratensioni generate dall'induttanza del motore; il condensatore C
riduce i disturbi dovuti sia alla commutazione del transistor che alle
spazzole del motore.
U.D. 7: REGOLATORI DI POTENZA PWM
Il transistor come amplificatore di segnale
Il transistor, impiegato come amplificatore di segnale, genera in uscita
una tensione che riproduce, amplificata, quella in ingresso. Lo fa
controllando la corrente che scorre nel collettore e nella resistenza ad esso
collegata, che è in genere almeno di qualche migliaio di ohm. La corrente
che passa è quindi comunque piccola e non crea problemi per quanto
riguarda la potenza che il transistor può sopportare.
Il transistor nel controllo di potenza
Altra cosa è il transistor impiegato per pilotare un carico caratterizzato da
una bassa resistenza, come potrebbe essere una lampadina di cui si vuole
regolare la luminosità. Analizzeremo adesso alcuni casi e faremo due
conti,
per
meglio
capire
come
vanno
le
cose.
Consideriamo uno stadio come quello in figura, alimentato a 12 volt,
dove un transistor comanda sul collettore una lampadina da 12 volt e
della
potenza
di
6
watt.
Primo caso: la tensione sulla base del transistor è nulla o molto bassa, per
cui il transistor non conduce e la tensione di alimentazione si trova quasi
tutta ai suoi capi (come indica il tester in figura). La lampada è spenta. La
potenza dissipata dal transistor, ottenuta moltiplicando la tensione ai suoi
capi per la corrente che lo attraversa è praticamente nulla, perchè in
queste condizioni passa una corrente debolissima (milionesimi di
ampere).
Secondo caso: la tensione sulla base del transistor è tale da portarlo in
completa
conduzione. La
lampada
è
completamente
accesa
e
la
tensione
di
alimentazione è
presente
quasi
tutta ai suoi capi.
La tensione ai
capi del transistor
è molto bassa,
pari a circa 0,6
volt. La corrente
che attraversa il
transistor è quella
che attraversa la
lampada, e cioè
0,5 ampere. La
potenza dissipata
dal transistor è
quindi 0,6 x 0,5 =
0,3 watt. Si tratta di una potenza piuttosto bassa, ma che è già al limite di
quella che può essere sopportata da transistori come i BC107, BC108,
BC109 e simili (la cui potenza massima è proprio di 0,3 w).
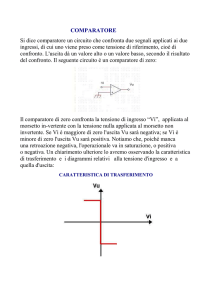
Terzo caso: la tensione sulla base ha un valore intermedio, per cui la
lampada è accesa a metà. In questo caso la tensione di alimentazione si
dividerà fra la lampada ed il transistor, in percentuali diverse da caso a
caso. Supponiamo che dei 12 volt totali, siano presenti 7 volt sulla
lampada e 5 volt sul transistor, e che passi una corrente di 0,25 ampere.
La potenza dissipata dal transistor diventa 5 x 0,25 = 1,25 watt. Tale
potenza richiederebbe già l'impiego di transistori relativamente robusti e
adeguatamente
raffreddati, quelli
che
vengono
definiti
"transistori
di
potenza". Bisogna
pensare
che
stiamo parlando
di pilotare una
lampada di soli 6
W. Se al suo
posto ce ne fosse
stata una da 60
W, in analoghe
condizioni il transistor si sarebbe trovato a dover dissipare una potenza di
12 w e oltre.
La tecnica ad impulsi
Come abbiamo visto analizzando i tre casi precedenti, controllare un
carico di potenza regolando gradualmente la corrente che passa nella base
e quindi nel collettore del transistor, risulta poco consigliabile: c'è infatti
un notevole spreco di potenza che porta tra l'altro a surriscaldare il
transistor, col rischio di distruggerlo. Una soluzione è quella del
funzionamento in regime impulsivo. Considerando che i casi in cui il
transistor è meno sollecitato si verificano quando la lampadina è tutta
accesa o tutta spenta, noi faremo lavorare il transistor sempre in tali
condizioni, senza mai riccorrere a situazioni intermedie. Ma come si può
allora fare in modo che la lampadina si accenda di più o di meno?
Semplicemente accendendola e spegnendola tantissime volte in sequenza,
a intervalli così vicini che la luce sembri sempre accesa. Se i tempi in cui
la lampada è spenta saranno più lunghi di quelli in cui è accesa, la luce
media sarà più bassa, e così via. Nella figura vediamo un esempio del tipo
di impulsi che devono arrivare sulla base del transistor per ottenere la
regolazione della luce: notiamo che gli impulsi si susseguono sempre con
la stessa frequenza (cioè alla stessa distanza); quello che cambia è la
lunghezza del periodo di tempo in cui ogni impulso si mantiene a livello
alto
(cui
corrisponde
la
lampada
Vedremo in una prossima lezione come produrre tali impulsi.
accesa).