1. SPAZIO VETTORIALE E SPAZIO EUCLIDEO
1. Lo spazio vettoriale Rn
Una n-nupla ordinata di numeri reali x = (x1 , x2 , . . . , xn ) si dice
vettore a n dimensioni e il numero xi componente i-esima di x. L’insieme
di tutti i vettori di dimensione n è indicato con Rn . Definiamo la relazione
di uguaglianza tra vettori e introduciamo le due operazioni vettoriali di
l’addizione e moltiplicazione per uno scalare1 .
Definizioni:
Uguaglianza. x e y sono uguali, x = y, se hanno le stesse coordinate, cioè
se
xi = yi
per ogni
i = 1, . . . , n.
Addizione. Il vettore somma di x e y si ottiene sommando le componenti
corrispondenti dei due vettori, cioè
x + y = (x1 + y1 , x2 + y2 , . . . , xn + yn )
Moltiplicazione per uno scalare. La moltiplicazione di un vettore x per
uno scalare c consiste nel moltiplicare le coordinate di x per c:
cx = (cx1 , cx2 , . . . , xn )
Per l’insieme Rn dotato delle due operazioni di addizione e moltiplicazione definite sopra valgono le seguenti proprietà:
P1) Proprietà di chiusura. Un insieme X è chiuso rispetto alla addizione
se per ogni coppia di elementi, x e y in X l’elemento somma, x +
1
Col termine ‘scalare’ si intende qui un numero reale.
1
y è ancora contenuto in X. Un insieme X è chiuso rispetto alla
moltiplicazione per uno scalare se per ogni x in X e per ogni c ∈ R
anche l’elemento cx appartiene all’insieme. L’idea è che un insieme
è chiuso rispetto a certe operazioni se il risultato di tali operazioni è
ancora un elemento dell’insieme.
P2) Proprietà commutativa e associativa della addizione e proprietà associativa e distributiva della moltiplicazione. In ordine sono le seguenti:
(i) x + y = y + x; (ii) (x + y) + z = x + (y + z); (iii) c(bx) = (cb)x
e (iv) c(x + y) = cx + cy.
P3) Esistenza di un elemento neutro per la somma e di un elemento neutro
per la moltiplicazione. Il vettore le cui coordinate sono tutte pari a
0, cioè 0 = (0, 0, . . . , 0) è detto il vettore nullo o lo zero di Rn ; il
vettore nullo è l’elemento neutro della somma in quanto x + 0 = x.
Per quanto riguarda la moltiplicazione l’elemento neutro è lo scalare
1, in quanto (1)x = x.
P4) Esistenza dell’opposto per l’addizione. Per ogni elemento x, il vettore
(−1)x (per brevità −x) è l’ opposto di x in quanto x + (−x) = 0.2
Le proprietà delle operazioni qui elencate possono essere verificate
agevolmente (si vedano gli esercizi) e discendono dalle proprietà analoghe
dei numeri reali. Oltre a queste proprietà ve ne sono anche altre che
possono rivelarsi utili in molti casi; ad esempio, se cx = 0 allora c = 0
oppure x = 0. La dimostrazione è semplice: se c = 0 allora cxi = 0 per
2 Dalle due operazioni introdotte è possibile definire un’altra operazione tra vettori, la differenza, nel modo seguente
x − y = x + (−y) = (x1 − y1 , . . . , xn − yn ).
2
ogni i, quindi xi = 0 per ogni i. Dall’altro lato, se x = 0 allora cxi = 0
per qualche xi = 0 e quindi c = 0.
2. Interpretazione geometrica delle operazioni
I vettori dello spazio Rn per n ≤ 3 possono essere considerati, a
seconda dei casi, come coordinate di punti della retta, del piano o dello
spazio; ad esempio, al vettore (a1 , a2 ) di R2 si associa il punto del piano di
coordinate (a1 , a2 ), e viceversa; quindi, è naturale indicare con una stessa
lettera, ad esempio A, sia il punto del piano che il corrispondente vettore
di R2 . Per analogia, dunque, estenderemo questa terminologia anche agli
spazi di dimensione superiore a 3 e indicheremo con uno stesso simbolo
sia i vettori di Rn che i punti dello spazio a n dimensioni. In questa parte
stabiliremo una ulteriore corrispondenza tra i vettori dello spazio Rn e
altri enti geometrici chiamati vettori geometrici o applicati; questo nuovo
concetto consentirà di ottenere una interessante interpretazione geometrica delle operazioni algebriche precedentemente introdotte nello spazio
vettoriale.
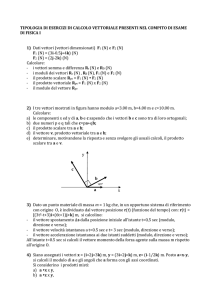
Un vettore geometrico o applicato è un segmento orientato, cioè un
segmento con una punta in uno degli estremi e che quindi assume la forma
di una freccia. Un vettore geometrico è caratterizzato da tre fattori: la
lunghezza del segmento, la direzione, indicata dalla retta su cui giace,
e il verso indicato dalla punta della freccia. Per individuare un vettore
geometrico è sufficiente una coppia ordinata di punti; i punti determinano
il segmento, quindi la sua lunghezza e direzione, mentre l’ordine stabilisce
un punto iniziale ed uno finale o vertice, cioè indica il verso. Il simbolo
comunemente impiegato per indicare il vettore geometrico spiccato dal
−→
punto A e con vertice nel punto B è AB.
Due vettori si dicono equivalenti se hanno la stessa lunghezza, la stessa
−→
direzione e lo stesso verso. Ad esempio, un vettore geometrico CD ot3
B
•
...........
..........
.......
.......
.
.
.
.
.
.
.
.
........
.......
.......
.......
.
.
.
.
.
.
......
A
•
•D
−→
AB
................
........ .
.......
.
.
.
.
.
.
.
........
.......
.......
.......
.
.
.
.
.
.
.....
.......
C
•
−→
CD
−→
tenuto da AB per traslazione (cioè attraverso uno spostamento parallelo)
−→
è equivalente ad AB perché conserva le tre caratteristiche indicate. I vet−→ −→
tori geometrici AB e BA, invece, pur avendo la stessa lunghezza e la stessa
direzione non sono equivalenti perché hanno verso opposto; analogamente,
−→
−→
si può osservare che BA può essere ottenuto da AB attraverso due trasformazioni geometriche consecutive: si effettua una rotazione di 180 gradi
−→
−→
di AB attorno al suo punto iniziale e poi si ottiene BA per traslazione. I
due vettori geometrici, dunque, non sono equivalenti perché per passare
dall’uno all’altro non è sufficiente una traslazione ma occorre anche una
rotazione.
La somma tra vettori geometrici è definita in base alla ‘regola del
parallelogramma’: si considerino due vettori geometrici spiccati da uno
−→ −→
stesso punto iniziale, OA e OB, e si costruisca in base ad essi un parallelogramma di vertici O, A, B e C come illustrato nella figura; il vettore
−→
−→
geometrico OC, cioè la diagonale del parallelogramma è la somma di OA
−→
e OB eseguita mediante la ‘regola del parallelogramma’.
Limitandoci per semplicità al caso del piano, introduciamo un sistema di coordinate e caratterizziamo l’equivalenza dei vettori geometrici
in termini delle coordinate dei loro punti iniziali e finali. Dato un vettore
−→
AB si indichino con A = (a1 , a2 ) e B = (b1 , b2 ) le coordinate del punto
iniziale e del punto finale e, come illustrato nella figura, si costruisca un
−→
triangolo rettangolo di cui AB è l’ipotenusa. Si nota immediatamente che
4
•C
.
...............
... ... .......
.. ... ........
.
.
.
.
...
.. .
... ...
.... ..
... ...
... .
....
... ...
.
.
.
...........
...
..
..
....
..
...
...
..
...
...
.
.
.
.
.
.
....
...
..
...
...
....
..
...
.
....
.
.
.
.
.
..
..
...
...
..............
... ....
...........
... .......
.
.
.
.
.
.
.
.
.
.
.
.. ....
.........
... ... ..........
..................
...........
B•
b2
a2
•
A
•
O
...
..
..
... . . . . . . . . . . . .................
.. .
..
........ . ..
...
.......
..
...
.......
.
.
.
.
..
.
.
.
..
... . . . . . ................... ... ... ... ... ... ... ....
...
.
.
..
.
.
...
..
.
.
..
.
.
...
..
.
.
...
.
.
...
..
.
.
..
.
.
...
..
.
.
....................................................................................................................
O
B
A
•
a1
b1
le differenze tra le coordinate dei punti iniziale e finale, B − A, che sono
pari a (b1 −a1 , b2 −a2 ), sono le lunghezze dei cateti del triangolo rettangolo
−→
di cui il vettore geometrico AB è l’ipotenusa.
−→
Si consideri un’altro vettore geometrico, CD, ed in modo analogo a
quello visto sopra si costruisca un triangolo rettangolo. Se le lunghezze
dei cateti, D − C e B − A, dei due triangoli sono proporzionali tra loro,
cioè se (D − C) = c(B − A) dove c è un numero reale non nullo, allora
le ipotenuse dei due triangoli rettangoli considerati formano uno stesso
−→ −→
angolo con l’asse delle ascisse. Quindi i due vettori geometrici, AB e CD
giacciono su rette parallele, cioè hanno la stessa direzione; se, inoltre, c > 0
i vettori hanno lo stesso verso, se invece c < 0 hanno verso opposto.
−→ −→
Supponiamo che le coordinate di due vettori geometrici AB e CD
soddisfino la condizione B − A = D − C; dal punto di vista geometrico ciò
−→ −→
significa che i triangoli rettangoli di cui AB e CD sono le ipotenuse sono
triangoli uguali in quanto sono uguali le lunghezze dei loro cateti e quindi
i due vettori geometrici hanno la stessa lunghezza, direzione e verso, cioè
sono equivalenti. Questa osservazione di induce a definire l’equivalenza
5
tra vettori geometrici in termini delle coordinate dei loro punti iniziali e
−→ −→
finali nel modo seguente: AB e CD sono equivalenti se B − A = D − C.
Per stabilire una corrispondenza biunivoca tra i vettori di R2 e i
vettori geometrici del piano (cosı̀ come si è fatto in precendenza per i punti
del piano) possiamo limitarci a considerare soltanto i vettori geometrici
applicati nell’origine degli assi, O. In tal caso, infatti, essendo fissato il
punto iniziale è sufficiente fissare il punto finale per individuare un vettore
geometrico; perciò, ad ogni punto del piano, P , associamo un vettore
geometrico che parte dall’origine O e ha come vertice proprio il punto P ;
e viceversa, ad ogni vettore geometrico applicato nell’origine e con vertice
in P associamo il punto P . Quindi, possiamo rappresentare i vettori di R2
sia come punti del piano che come vettori geometrici applicati all’origine.
Ora mostreremo che l’operazione di addizione tra vettori di Rn che
abbiamo definito in precedenza ammette una importante interpretazione
geometrica per n = 2: la somma tra vettori corrisponde geometricamente
alla somma dei vettori geometrici eseguita mediante la ‘regola del parallelogramma’.
Dati i vettori A e B si prenda un vettore geometrico equivalente a
−→
−→
OA e con punto iniziale in B, cioè il vettore BC. I punti O, A, B e C sono
i vertici di un parallelogramma i cui lati sono dati dai vettori geometrici
−→ −→
OA e OB. Ora mostreremo che le coordinate del vertice C sono date dal
vettore somma A + B e quindi il vettore somma corrisponde al vettore
−→
−→ −→
geometrico OC. Poiché i vettori geometrici OA e BC sono equivalenti per
costruzione, tra le coordinate dei punti deve valere la condizione A = C −B
e quindi C = A + B; cioè, le coordinate del vertice del parallelogramma,
C, sono date dal vettore somma A + B.
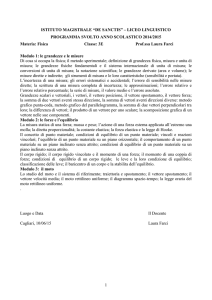
Analogamente, possiamo interpretare geometricamente anche la differenza tra vettori. Ad esempio, consideriamo il vettore differenza B − A
e l’identità A + (B − A) = B. Se applichiamo l’interpretazione geometrica ottenuta dall’addizione, osserviamo immediatamente che il vettore
6
...
..
..
..
........
...
.............
...
................
.
.
.
..
.
.
...
..
. ... ........ ....
... ..
...
.... .
..
.....
.... ....
............
.
.
.
...
.
.... ..
...
..
.... ..
..
...
....
.
..
... .......
...
.
.
...
..
...
..
..
.. ........
..
.
.
.
...
...
... ....
......
.. .... ........ ...................
.. ... .... ........
... ......... ...........
.. .............
.................................................................................................................................
C=A+B
•
B
•
•
A
O
...
..
..
..
. ....
...
.......
...
...... ...
.
.
.
..
..
..
... ...
. ...
..
...
... ..
..
..
....................
.
.
.
.
.
...
..
... ...... ... .... . ..
..
..
. ...
..
..
..
...
..........
.
.
.
.
.
.
.
.
.
.
.
... .
.. ..
..
.... .
.. ..
...
....... ....
.
...
.. .
...............
... ... ....
.
.
.
.. .
.
.
.
... .. ....
.
.
.
.
...
.
.
.. .. ...
.
.
.
.
..... .. ..........
..................
.....................................................................................................................
B
•
B-A•
•
A
O
differenza B − A deve essere uno dei lati del parallelogramma che ha per
diagonale il vettore B (si veda la figura). Infine, se si considera il parallelogramma costruito su A e B possiamo concludere che la somma A + B
e la differenza B − A corrispondono geometricamente alle diagonali del
parallelogramma.
L’interpretazione geometrica della moltiplicazione scalare è abbastanza immediata; se un vettore è un multiplo scalare di un altro, cioè
se B = cA, allora, come si è già visto in precedenza, i due vettori hanno la
stessa direzione e hanno verso ‘concorde’ se c > 0, mentre se c < 0 hanno
verso opposto; inoltre, la lunghezza di B è |c| volte quella di A. Graficamente, i multipli scalari di un vettore A giacciono tutti sulla stessa retta
passante per l’origine. Per analogia, estendiamo queste idee geometriche
a tutti gli spazi vettoriali Rn .
Definizione. Due vettori x e y di Rn sono paralleli se uno è un multiplo
scalare dell’altro, cioè se y = cx con c = 0. Se c > 0 i due vettori hanno la
stessa ‘direzione’ e lo stesso ‘verso’; se c < 0 i due vettori hanno la stessa
7
direzione ma verso opposto.
3. Prodotto scalare e spazio euclideo
Allo scopo di definire le nozioni di lunghezza di un vettore, di distanza
tra punti e di angolo tra vettori introduciamo una nuova operazione tra
elementi di Rn . Il prodotto scalare è un’operazione che si differenzia da
quelle già introdotte nello spazio vettoriale in quanto il risultato di tale
operazione non è un vettore ma un numero reale. L’insieme Rn dotato
della operazione di prodotto scalare, che ora definiremo, è chiamato spazio
euclideo.
Definizione. Il prodotto scalare (o prodotto interno) tra due vettori x e
y è un numero reale definito nel modo seguente
x · y = x1 y1 + · · · + xn yn =
n
xi yi ,
i=1
cioè, è la somma dei prodotti delle componenti con lo stesso indice.
Il prodotto scalare cosı̀ definito per i vettori di Rn soddisfa le seguenti
proprietà:
S1) Commutativa: x · y = y · x.
S2) Distributiva: x · (y + z) = x · y + x · z.
S3) Omogeneità: c(x · y) = (cx) · y = x · (cy)
S4) Positività: x · x > 0 se x = 0.
S5) x · x = 0 se x = 0.
La verifica di queste proprietà è semplice ed è lasciata come esercizio.
Da queste proprietà ne discendono altre; ad esempio, utilizzando la proprietà commutativa e distributiva si mostra che il prodotto scalare della
somma di due vettori è dato da (x + y) · (x + y) = x · x + y · y + 2x · y,
8
una formula simile al quadrato della somma di due numeri reali. Tuttavia,
a differenza del prodotto definito sul campo dei numeri reali, non vale la
nota proprietà che se il prodotto di due numeri è nullo allora almeno uno
dei fattori deve essere nullo. Nel caso del prodotto scalare possiamo avere
infatti i due vettori non nulli x = (1, 1) e y = (1, −1) e il cui prodotto
scalare è x · y = 1 − 1 = 0. Vedremo più oltre qual è l’interpretazione
geometrica da attribuire ai vettori il cui prodotto scalare si annulla.
La definizione di prodotto scalare data sopra non è l’unica. In termini
assiomatici si dice ‘prodotto scalare’ qualsiasi funzione da Rn × Rn a R
che soddisfa le cinque proprietà sopra indicate.
Esempio 1. Sia q un vettore di componenti strettamente positive, cioè
con qi > 0 per ogni i. La funzione che ad ogni coppia di vettori x e y
associa il numero
n
qi xi yi
i=1
è un prodotto scalare in quanto soddisfa le cinque proprietà sopra indicate
(si verifichi per esercizio).
Prima di chiudere questa parte dimostreremo una importante proprietà del prodotto scalare:
Diseguaglianza di Cauchy-Schwarz: per ogni coppia di vettori, x e
y, di Rn vale:
(x · y)2 ≤ (x · x)(y · y)
Inoltre, il segno di eguaglianza vale se e solo se un vettore è un multiplo
scalare dell’altro.
In base alla definizione di prodotto scalare che abbiamo dato questa
9
diseguaglianza assume la forma:
n
2
xi yi
i=1
=
n
x2i
i=1
n
yi2
i=1
Ora presentiamo una dimostrazione della ‘diseguaglianza di CauchySchwarz’ valida per qualsiasi definizione di prodotto scalare (anche per
quella dell’esempio 1) in quanto fa unicamente riferimento alle proprietà
S1) – S5).
Dimostrazione. Se x o y sono nulli allora la diseguaglianza è banalmente vera; quindi asumiamo che entrambi i vettori siano diversi dal
vettore nullo. Si definisca z = sx − ty con s = y · y e t = x · y e si applichi
la proprietà del prodotto scalare z · z ≥ 0, cioè
(sx − ty) · (sx − ty) = s2 x · x + t2 y · y − 2stx · y ≥ 0
Sostituendo s e t si ricava
(y · y)2 x · x + (x · y)2 y · y − 2y · y(x · y)2 ≥ 0
Poiché y = 0 si può dividere tutto per y · y ottenendo
(y · y)x · x + (x · y)2 − 2(x · y)2 ≥ 0
da cui si ricava facilmente l’enunciato. Infine, poiché z · z = 0 se e solo se
z = 0, allora l’uguaglianza vale se e solo sx = ty, cioè se un vettore è un
multiplo scalare dell’altro.
4. Lunghezza o norma di un vettore
Per definire la lunghezza o norma di un vettore di Rn faremo riferimento anche in questo caso alla interpretazione geometrica disponibile
10
per i vettori di R2 . Il vettore geometrico spiccato dall’origine e con vertice
nel punto x = (x1 , x2 ) è l’ipotenusa di un triangolo rettangolo i cui cateti
hanno lunghezza pari a x1 e x2 . Per il teorema di Pitagora sappiamo che
la lunghezza dell’ipotenusa al quadrato è pari alla somma dei quadrati dei
cateti, x21 + x22 = x · x, cioè è pari al prodotto scalare del vettore con se
stesso. Abbiamo quindi trovato un’interessante interpretazione geometrica
del prodotto scalare: la radice quadrata del prodotto scalare di un vettore
con se stesso è pari alla lunghezza del vettore. Per analogia, estendiamo il
concetto di lunghezza anche agli spazi vettoriali di dimensione maggiore
di 3, anche se l’interpretazione geometrica non è più possibile.
Definizione. La norma di un vettore è definita nel modo seguente
x =
√
x · x,
cioè è la radice quadrata del prodotto scalare del vettore per se stesso.
Dalle proprietà del prodotto scalare discendono le seguenti proprietà
per la norma:
N1) Omogeneità: cx = |c|x
N2) Positività: x > 0 se x = 0.
N3) x = 0 se x = 0.
N4) ‘Diseguaglianza triangolare’: per ogni coppia di vettori x e y vale
x + y ≤ x + y
Le prime tre proprietà sono facilmente verificabili; per quanto
riguarda la ‘diseguaglianza triangolare’ daremo la dimostrazione qui di
seguito.
Dimostrazione. Si tenga presente che la ‘diseguaglianza triangolare’ si
può scrivere in modo equivalente come segue:
x + y2 ≤ (x + y)2
11
Inoltre, si noti che x + y2 = x · x + y · y + 2x · y e che (x + y)2 =
x · x + y · y + 2x · y. Infine, si applichi la ‘diseguaglianza di CauchySchwarz’ nella forma
|x · y| ≤ xy
e si noti che (x · y) ≤ |x · y|.
Dal concetto di norma possiamo passare facilmente a quello di ‘distanza’ tra i punti di Rn . Possiamo infatti definire la distanza tra due punti
come la lunghezza del vettore geometrico che li unisce. Dati due punti, A
e B sappiamo che la differenza B − A è un vettore equivalente al vettore
−→
geometrico BA; quindi la distanza tra A e B è la lunghezza del vettore
−→
geometrico BA, cioè B − A. Ora possiamo dare una giustificazione al
nome attribuito alla proprietà N 4): questa proprietà esprime il semplice
fatto che in un triangolo la lunghezza di un lato è inferiore alla somma
delle lunghezze degli altri due lati. Siano infatti i tre punti del piano A,
B e C i vertici di un triangolo e siano A − B, A − C e C − B la
lunghezza di ciascuno dei tre lati. Tra le lunghezze vale la diseguaglianza
sopra richiamata, e cioè
A − B ≤ A − C + C − B
Se ora poniamo x = A − C, y = C − B abbiamo anche x + y = A − B
e andando a sostituire nell’espressione sopra otteniamo proprio la ‘diseguaglianza triangolare’; quindi l’ovvio risultato secondo cui in un triangolo la somma di due lati è maggiore del terzo lato si traduce in termini
analitici nella diseguaglianza triangolare.
Chiudiamo questo paragrafo osservando che anche per la norma cosı̀
come per il prodotto scalare si può adottare un approccio assiomatico
e definire norma qualsiasi funzione da Rn a R che soddisfi le quattro
proprietà sopra indicate, cioè N1) – N4).
12
Esempio 2. Definiamo la funzione n(x) = maxi=1,...,n |xi |. È facile verificare che n è una norma; infatti, n(cx) = max |cxi | = max |c||xi | =
|c| max |xi | = |c|n(x), cioè la N1) è soddisfatta. Inoltre, se x = 0 allora
xj = 0 per qualche j, quindi n(x) = max |xi | ≥ |xj | > 0, cioè anche
N2) è soddisfatta. La N3) è ovvia ed infine per la N4) si applichi la diseguaglianza triangolare per i valori assoluti, cioè |xi + yi | ≤ |xi | + |yi |.
5. Ortogonalità e proiezione ortogonale
Nei paragrafi precedenti abbiamo utilizzato il prodotto scalare per
definire la lunghezza di un vettore e la distanza tra i punti di Rn . Ora
vedremo che il prodotto scalare è strettamente legato anche al concetto
di angolo tra vettori. Prendiamo in esame in primo luogo il caso di due
vettori del piano, x e y, che formano tra loro un angolo di 900 , cioè due
vettori perpendicolari. Poiché i due vettori sono i cateti di un triangolo
rettangolo sappiamo (dal teorema di Pitagora) che devono soddisfare la
condizione
x + y2 = x2 + y2
(∗)
Se sviluppiamo algebricamente l’espressione x + y2 ricaviamo
x + y2 = (x + y) · (x + y) = x2 + y2 + 2x · y
(∗∗)
Perciò se x e y sono perpendicolari (cioè, vale la (*)) allora la (*) e la (**)
dovranno essere uguali e quindi x · y = 0. Abbiamo visto, cioè, che se due
vettori sono perpendicolari allora il loro prodotto scalare è pari a zero (e
viceversa). Anche in questo caso estendiamo l’interpretazione geometrica
al caso generale di Rn :
Definizione. Due vettori x e y si dicono ortogonali se il loro prodotto
scalare è nullo, cioè se x · y = 0, e si scrive x ⊥ y.
13
..
..
..
..
...
..
.....
...
.........
...
. ...
..
...
..
...
...
...
..
...
...
...
...
...
..
...
..
...
... ....
..............
... ...
... ..........
.........
........... ...
........
.
.
.
.
.
.
... .. ...........
.... ........
............................................................................................................................................................
x·y = 0
y
x
O
Ogni vettore di Rn può essere espresso in modo univoco come la
somma di due vettori ortogonali; questo importante risultato è noto come
il teorema della ‘scomposizione ortogonale’. Illustreremo questo risultato
nel caso di R2 .
Dati due vettori x e y non nulli è possibile esprimere il vettore y
come somma di due vettori perpendicolari tra loro di cui uno è un multiplo scalare di x; la figura illustra il procedimento per ottenere questa
scomposizione del vettore y. In termini formali si ha: dati due vettori non
nulli x e y è possibile scrivere in modo univoco,
y = tx + z
con
x⊥z=0
(1)
Come si vede dalla figura il vettore tx è individuato tracciando la perpendicolare dal punto y sul vettore x; tx è chiamata la proiezione ortogonale
di y su x. Il valore dello scalare t dipende dai due vettori x e y e si può
ricavare agevolmente; infatti, dalla (1) si ha z = y − tx; inoltre, poichè z
e x sono perpendicolari deve valere x · z = x · (y − tx) = 0 da cui si ricava
immediatamente
t=
x·y
x·x
(2)
Definizione. Dati due vettori x e y, la proiezione ortogonale di y lungo
x è data dal vettore tx con t = x · y/x · x.
14
Ora utilizziamo il risultato sopra visto per introdurre la nozione di
angolo tra vettori in Rn . Rimanendo nel caso del piano, indichiamo con
θ l’angolo compreso tra i vettori x e y, come illustrato nella figura. Se
pensiamo a y come un punto sul cerchio con centro nell’origine, si può
mostrare che esiste una relazione tra il prodotto scalare di x e y e il
coseno dell’angolo θ compreso tra i due vettori. Infatti, dato che y è
il raggio del cerchio, la definizione di coseno di θ, in questo caso in cui
0 < θ < π/2, è
cos θ =
tx
x
= |t|
;
y
y
sostituendo t dalla (2) si ricava un’importante formula:
cos θ =
x·y
x y
(A.1)
Questa formula consente di definire l’angolo tra vettori in funzione delle
loro norme e del loro prodotto scalare; cioè l’angolo compreso tra x e y è
il numero θ che soddisfa l’equazione (A. 1); tale numero è ben definito, in
quanto, per la diseguaglianza di Cauchy-Schwartz si ha |x·y|/x y ≤ 1.
Inoltre, dalla (A. 1) otteniamo una espressione equivalente del
prodotto scalare: il prodotto scalare tra due vettori x e y è uguale al
prodotto delle norme moltiplicato per il coseno dell’angolo compreso tra i
due vettori, cioè
x · y = x y cos θ.
Da questa espressione si ricava un’interessante interpretazione geometrica
del prodotto scalare. Infatti, poiché le norme sono sempre non negative,
il segno del prodotto scalare dipende soltanto dall’ampiezza dell’angolo
compreso tra i due vettori; tenendo presente che
> 0 se 0 ≤ θ < π/2
cos θ = 0 se θ = π/2
< 0 se π/2 < θ ≤ π
15
..
..
..
..
...
..
...
...
..
..
. ............
... ... ...... .. .......... ...
.. ..
. .........
.
.
.
.
.
.
......
...
.
..
...
......... ...
.
.
..
... ...
.
..
...
... ..
.
.
..
... ..
..
.. ...................
... ... ....
.......................... ..
... .. ....
. ...
.
.
.
.
.
.. ... .....
.
.
.
.
.
..... .. .. .................
.... .........
...........................................................................................................................
y
z
θ
tx
x
O
si osserva immediatamente che: il prodotto interno tra x e y è (i) positivo,
se i due vettori formano un angolo acuto, (ii) nullo, se i due vettori formano
un angolo di 90 gradi e (iii) negativo, se i due vettori formano un angolo
ottuso.
6. Applicazioni geometriche: la retta
In questa parte consideriamo alcune descrizioni in termini analitici
della retta nel piano e nello spazio. Partiamo, come di consueto, dal caso
R2 . Dato un vettore v = (v1 , v2 ) i multipli scalari di tale vettore sono vettori paralleli a v, cioè hanno la stessa direzione di v. Se lasciamo variare
lo scalare consentendogli di assumere qualsiasi numero reale, otteniamo
l’insieme dei punti che stanno sulla retta passante per l’origine e con pendenza uguale a quella del vettore v. Quindi, ogni vettore determina una
retta passante per l’origine che può essere espressa analiticamente, nel
modo seguente
x = tv
con
t∈R
Questa espressione è detta l’equazione parametrica della retta passante
dall’origine e parallela a v; il vettore v è chiamato vettore direzione.
L’equazione parametrica di una retta passante per un punto diverso
16
dall’origine si può ricavare in modo analogo. Indichiamo con x i punti
−−→
di una retta passante per il punto p e parallela a v. I vettori p
x devono essere paralleli al vettore v, quindi tra le coordinate dei punti deve
valere la relazione x − p = tv, quindi l’equazione parametrica della retta
è x = p + tv.
Definizione. L’equazione parametrica di una retta passante per un punto
p e parallela al vettore v è data dall’espressione x = p + tv per t ∈ R.
Dalla definizione è abbastanza semplice ricavare l’equazione parametrica di una retta passante per due punti dati, ad esempio, p e q. Infatti,
in questo caso si può prendere come vettore direzione il vettore differenza
q − p e scrivere quindi x = p + t(q − p).
Nel caso di R2 , e soltanto in questo caso, possiamo sfruttare
l’ortogonalità per passare dall’equazione della retta in forma parametrica
alla equazione cartesiana della retta. Ovviamente la caratteristica comune
a tutti i vettori che giacciono su una retta è quella di avere la stessa direzione di v. Quindi, un vettore ortogonale a v è ortogonale anche a tutti
i vettori che giacciono sulla retta. Formalmente, se n = (n1 , n2 ) è un
vettore ortogonale a v, cioè n ⊥ v, allora dall’equazione parametrica della
retta otteniamo n · x = tn · v = 0, cioè n · x = n1 x1 + n2 x2 = 0. Dall’altro
lato si osserva che, in R2 , se i vettori x e v sono entrambi ortogonali ad
uno stesso vettore n allora x e v sono multipli scalari l’uno dell’altro, cioè
i vettori x giacciono sulla retta passante per l’origine e parallela a v. Per
dimostrare questa affermazione si ponga k = v1 /v2 e quindi si riscriva il
vettore v = (v1 , v2 ) = v1 (1, k); cioè, si riscriva il vettore v come multiplo
scalare del vettore di componenti (1, k). Dalle condizioni di ortogonalità
x ⊥ n e v ⊥ n si ottiene x2 /x1 = v2 /v2 = k, cioè x2 = kx1 ; quindi possiamo riscrive il vettore x come segue, x = x1 (1, k), cioè anch’esso come
17
multiplo scalare del vettore (1, k). Pertanto i vettori x e v sono multipli
scalari.
Da questa discussione abbiamo ricavato la conclusione che l’insieme
dei punti x di R2 che soddisfano l’equazione n · x = 0 è una retta passante
per l’origine e con vettore direzione perpendicolare a n. Il vettore n è
chiamato il vettore normale alla retta e n · x = 0 è l’equazione cartesiana
della retta.
Analogamente, si può mostrare che l’equazione n · (x − p) = 0 rappresenta una retta passante per il punto p e con direzione perpendicolare
al vettore n