1/2
ESERCITAZIONE DI SISTEMI VAele MAGGIO- 2012
1)Si vuole controllare l’uscita di un sistema ,la cui Fdt è data dalla formula
G(s)=44,8 104/((s+50)(s+600)) , utilizzando un sistema controreazionato in cui la Fdt del
blocco di ritorno vale H(s)=0,11. Il sistema di controllo deve introdurre ,a regime ,un errore
al segnale a gradino unitario posto in ingresso inferiore all’ 1% della sua ampiezza e inoltre
deve avere una sensibilità parametrica di almeno -20 db. Cio’ premesso rispondi alle
seguenti domande:
a)Disegna lo schema a blocchi del sistema ;b) Verifica che siano rispettate le specifiche
richieste e in caso contrario inserisci, nella linea di andata, un blocco che
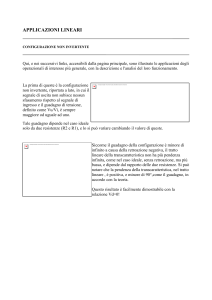
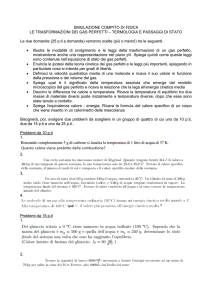
amplifichi di un fattore K opportunamente calcolato; c)Progetta la rete correttrice
anticipatrice di figura A nel caso in cui il sistema non presenti un adeguato margine di fase
e indicane la collocazione.
Gcorrettrice=1+sCR
FIG A
SOLUZIONE:
b)Dalla teoria sappiamo che l’errore a regime è dato dalla formula lim e(t)=lim s I(s)/(1+HG)
in questo caso I(s)=A/s , A è l’ampiezza del gradino che vale 1, sostituendo si ricava
l’ampiezza dell’errore e=1/(1+0,11*14,8 )=1/ 2,628=0,38 che risulta essere il 38%
dell’ampiezza del gradino unitario d’ingresso- Il valore di G=14,8 è stato ottenuto dalla G(s)
ponendoS=0.
La sensibilità parametrica è data dalla formula 1/(1+HG) calcolata per s=0 e vale in db
Sp=20 Log(1/(1+HG))=20Log(1/2,268)=-8,39 db che risulta maggiore dei -20 db richiesti.
Si ricorda che la sensibilità parametrica è una misura della capacità della controreazione
di ridurre l’effetto delle variazioni del guadagno del sistema G sul guadagno del sistema
reazionato Gcl(guadagno totale a catena chiusa).
Introduciamo nelle formule il fattore K incognito, per la condizione sull’errore imponiamo
1/(1+GHK)<=0,01 e da qui si ricava facilmente K>=99/1,628=60.
La seconda condizione vuole che 20Log(1/(1+HGK))=-20db e quindi: 1+HGK>=10 ,da cui
k>=5,52 . Dovendo essere soddisfatte entrambe le condizioni porremo K>=60.
2/2
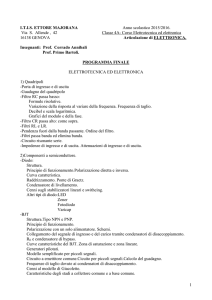
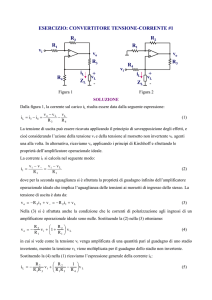
b)In figura B è riportato il diagramma di Bode delle ampiezze |G(s)ol|=|G(s) H(s) K| , come
si vede il grafico taglia l’asse delle ω con una pendenza di -40db/decade a cui corrisponde
uno sfasamento di circa -180° per cui il margine di fase vale Mφ=180+φ=0°
Per aumentare il margine di fase senza diminuire il polo dominante, che è posto a 50
rad/sec,
si introduce uno zero in corrispondenza del 2° polo della G(s) che è posto a 600 rad/sec
utilizzando il circuito di figura A.
La Fdt del circuito si ricava immediatamente tenendo conto che il guadagno per l’operazionale
collegato nella configurazione non invertente è dato dalla (1+Z2/Z1) con Z2=R e Z1=1/(sC)
risulta Fdt=1+sCR. Si tratta di un derivatore reale non invertente che presenta uno zero per
s=-1/RC e passando a ω per ω=1/RC. Introducendo uno zero per ω=600 rad/sec, la curva
diventa una retta che taglia l’asse delle ω con una pendenza di -20db/decade (fig B) cui
corrisponde uno sfasamento di -90° e il margine di fase passa a 90° gradi. In realtà il circuito
alle alte frequenze introduce uno o più poli che però non interessano perchè a queste
frequenze il guadagno tende a zero e non creano problemi per alla stabilità. Il valore del
prodotto RC si ricava da RC=1/ ω= 1,666 ms con ω=600rad/sec, ponendo C=1µF otteniamo
R=1,666KΩ. La rete correttrice si pone sulla linea di andata. Se la derivazione alle frequenze
più alte pone dei problemi si può utilizzare una rete con uno zero a 600rad/sec e un polo
per esempio a 1000rad/sec in modo da non alterare il punto di intersezione con l’asse delle
ω(vedi grafico B)