FONDAMENTI TEORICI DEL MOTORE IN CORRENTE CONTINUA
AD ECCITAZIONE INDIPENDENTE
a cura di G. SIMONELLI
Nel motore a corrente continua si distinguono un sistema di eccitazione o sistema induttore che è
fisicamente collocato nella parte fissa ( = statore ) del motore a realizzare i poli magnetici di eccitazione,
e un sistema indotto coincidente con la parte rotante ( = rotore ). Il sistema indotto prende anche il nome
di armatura.
Il motore a cc è usato prevalentemente negli azionamenti elettrici dove sia necessario un controllo e una
regolazione della velocità di rotazione. Esso è del tipo ad eccitazione indipendente perché il sistema di
eccitazione è elettricamente separato (quindi indipendente) dal sistema indotto .
Possiamo distinguere questi motori ad eccitazione indipendente in due famiglie:
a) motori a magneti permanenti ( mccmp);
b) motori a eccitazione separata a campo avvolto.
I primi sono motori di piccola potenza; in essi il campo magnetico induttore è generato da una coppia di
poli magnetici realizzati mediante due magneti permanenti di opposta polarità.
I secondi possono raggiungere potenze fino al centinaio di kW; in essi il campo magnetico induttore è
generato da appositi avvolgimenti ( avvolgimenti di campo )disposti intorno alle espansioni polari dello
statore e sono percorsi da corrente continua ( corrente di eccitazione) in modo tale da formare due poli
di nome opposto, o quatto o sei poli ecc.. alternativamente N-S-N-S….. L’alimentazione elettrica del
circuito di eccitazione è distinta e separata da quella del circuito indotto.
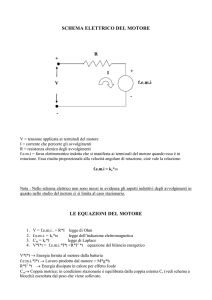
La figura seguente mostra la struttura elettrica meccanica e magnetica di un motore a corrente continua a
due poli con eccitazione ( indipendente ) mediante bobine
Piano neutro
+ Va
traferro
spazzola
Polo magnetico Nord
Collettore a
lamelle
Bobina di campo o
di eccitazione
Ia
Flusso magnetico
Rotore, indotto, armatura
Ie
Conduttore
dell’avvolgimento
indotto. Corrente
entrante
Ie
- Ve
+ Ve
- Va
2
Si distinguono:
•
lo statore, di forma cilindrica cava, di materiale ferromagnetico; lo statore è dotato all’interno di
due prolungamenti intorno ai quali sono collocate le bobine di eccitazione. I prolungamenti
terminano con due espansioni che prendono il nome di espansioni polari e realizzano i poli
magnetici di eccitazione N e S.
Le bobine di eccitazione costituiscono il circuito elettrico di eccitazione. Esso è alimentato con
una tensione, detta tensione di eccitazione, Ve. Questa determina la corrente di eccitazione
Ve
Re = resistenza del circuito di eccitazione
Ie =
Re
che a sue volta genera il flusso di eccitazione Ф e l’induzione magnetica B che sono alla base
del funzionamento della macchina.
Il piano intermedio tra i due poli è detto piano neutro.
•
Il rotore, chiamato comunemente anche con i termini indotto o armatura, di forma cilindrica, di
materiale ferromagnetico laminato ( per ridurre al minimo le perdite di potenza nel ferro ( perciò
chiamate Pfe ) per isteresi e per correnti parassite). Sulla periferia del rotore sono ricavate delle
scanalature o cave in cui sono alloggiati i conduttori dell’avvolgimento di indotto. Tali conduttori
sono percorsi dalla corrente Ia detta corrente di armatura. L’avvolgimento di armatura,
alimentato dalla tensione di armatura Va, è realizzato in maniera tale che tutti i conduttori sotto
l’influenza di un polo sono percorsi dalla corrente Ia nello stesso verso, mentre tutti i conduttori
sotto l’influenza del polo di nome opposto sono percorsi dalla stessa corrente Ia ma nel verso
opposto al precedente ( quindi sono percorsi dalla corrente -Ia ). Nei conduttori che in un certo
istante si trovano esattamente in corrispondenza del piano neutro la corrente è invece uguale a
zero. In altre parole durante la rotazione del rotore quando un conduttore attraversa il piano neutro
la corrente in esso si inverte passando dal valore Ia al valore -Ia. Questo aspetto del
funzionamento del motore a corrente continua è chiamato con il termine tecnico commutazione
Teoricamente quindi si ha il seguente andamento della corrente nei conduttori che attraversano il
piano neutro
Corrente in un conduttore
Ia
Posizione del conduttore rispetto al piano neutro
-Ia
La distribuzione detta della corrente Ia nei conduttori e il suo andamento particolare in un
conduttore in corrispondenza del piano neutro è ottenuto in virtù della presenza del sistema
elettromeccanico collettore-spazzole:
•
Collettore a lamelle: è un organo meccanico di forma cilindrica, solidale col rotore e posizionato
sul prolungamento dell’albero del rotore, costituito da un certo numero di settori di forma
opportuna , di rame, isolati tra di loro e rispetto all’albero del motore. Ogni lamella è collegata ad
un conduttore dell’avvolgimento di armatura. Il collettore è la parte più critica del motore a
corrente continua per motivi di ordine meccanico ( usura meccanica a causa dello strisciamento
delle spazzole che poggiano su di esso con una certa pressione per garantire un buon contatto
elettrico) ed elettrico ( a causa dello scintillio che si ha tra spazzole e lamelle quando ogni
3
spazzola perde il contatto con una lamella e attiva un nuovo contatto con la lamella che segue nel
senso della rotazione);
•
Spazzole sono di grafite e hanno la funzione di permettere un buon collegamento elettrico del
circuito indotto, in permanente rotazione, con il circuito esterno di alimentazione che è fisso.
Il rotore è ottenuto mediante l’affiancamento di lamierini isolati tra di loro con vernici isolanti
4
Motore a c.c a magneti permanenti
Motore a c.c. a eccitazione indipendente a due poli e a quattro poli
Come nasce la coppia motrice nel motore a corrente continua
Il principio su cui si basa il funzionamento del motore a corrente continua è semplice: un conduttore
percorso da corrente I ( A ) , disposto perpendicolarmente per una lunghezza L ( m ) in un campo
magnetico di induzione magnetica B ( T ) è sottoposto ad una forza meccanica perpendicolare sia a
I che a B il cui valore è espresso dalla relazione
F
Conduttore percorso da corrente I uscente dal foglio
Forza F diretta verso l’alto
B
F=BLI
[N]
+ Va
F
Conduttore percorso da corrente I entrante nel
Forza F diretta verso il basso
foglio
F11
Ia
Applicando questa legge a due conduttori
diametralmente opposti del rotore, come i conduttori
5 e 11, si vede che essi, essendo percorsi da correnti
di uguale intensità Ia ma di versi opposti e trovandosi
in una identica situazione magnetica, sono sottoposti
a due forze di uguale intensità ma di verso (verticale)
opposto,
Ie
F5 = B5 L Ia
e
F11 = B11 L Ia
+ Ve
Tali forze presentano un braccio b e quindi
formano una coppia C5-11 data da
F5
- Ve
- Va
b
5
C5-11 = B L Ia b
[N m ]
si può osservare che il prodotto L b rappresenta una superficie, e precisamente la superficie della spira
individuata dai conduttori 5 e 11. Indicando tale superficie con S5-11 si ha
C5-11 = B S 5-11 Ia
ora si può osservare che il prodotto B S 5-11 rappresenta il flusso magnetico che attraversa
perpendicolarmente la superficie della spira formata dai conduttori 5 e 11. Pertanto avremo
C5-11 = Ф5-11 Ia
la coppia motrice sulla spira formata da due conduttori diametralmente opposti è pari al prodotto
del flusso attraverso la spira per l’intensità di corrente nei due conduttori costituenti la spira.
Osserviamo che il valore di questa coppia dipende dalla posizione della spira ed è tanto più grande quanto
più lontani sono i conduttori dal piano neutro. In particolare questa coppia è massima per la spira formata
da due conduttori posizionati sull’asse polare ed è minima e uguale a zero per la spira formata da due
conduttori posti sul piano neutro (braccio uguale a zero e corrente uguale a zero ). Possiamo anche dire
che la coppia motrice su una spira cambia periodicamente da un massimo a zero, con periodo 180°.
Considerando quindi tutte le altre coppie di conduttori diametralmente opposti otteniamo altre coppie di
diverso valore istantaneo ma con uguale andamento temporale, sfasate tra di loro di un angolo pari
all’angolo meccanico esistente tra due conduttori successivi.
La coppia totale a cui risulta sottoposto il rotore, e che costituisce la coppia motrice che determina la
rotazione del motore si ottiene sommando tutte queste coppie motrici parziali
Ctot = C1-7 + C2-8 + C3-9 + C4-10 + C5-11 + C6-12
Questa coppia motrice, a differenza delle coppie motrici parziali, risulta costante se il numero dei
conduttori è sufficientemente grande, e proporzionale al flusso induttore Ф e alla corrente assorbita dal
motore Ia ed è espressa dalla relazione
C = K Ф Ia
Come si può invertire il senso di rotazione del motore a corrente continua.
L’espressione sopra trovata della coppia motrice suggerisce quali sono i criteri con cui può essere
invertito il senso di rotazione del motore:
•
•
Invertendo il verso della corrente assorbita dal motore ( quindi mediante inversione della polarità
della tensione di alimentazione); oppure:
Invertendo il segno del flusso di eccitazione, quindi invertendo il verso della corrente di
eccitazione, e quindi, in definitiva, invertendo la polarità della tensione di eccitazione
6
Schematizzazione grafica del motore a corrente continua ad eccitazione indipendente
La figura seguente mostra la schematizzazione del motore.
I
Per comodità si rappresenta il sistema più
semplicemente così
Ie
M
Ua
Ue
C
n
ω
Ua
M
C = coppia motrice [Nm ]
n = velocità di rotazione in giri /min
ω = velocità (angolare) di rotazione in rad / s
Quando il motore a corrente continua è usato per controllare la velocità di un albero esso viene chiamato
anche servo-motore.
Il modello elettrico del motore in corrente continua:
Il motore in corrente continua ad eccitazione indipendente può essere rappresentato elettricamente con il
seguente modello ( l’eccitazione non è rappresentata) :
E
Ia
La
Ra
Ф
E
Ua = tensione di armatura applicata ai
morsetti del motore
Ra = resistenza degli avvolgimenti di
armatura
La = induttanza degli avvolgimenti di
armatura
E = forza controelettromotrice ( fcem ) che
si oppone alla tensione di armatura
quando il motore gira
Il valore della resistenza di armatura Ra è tipicamente di qualche ohm o frazione di ohm.
Quando lo studio del motore viene eseguito a regime, cioè a velocità di rotazione costante, l’induttanza
La può essere omessa e lo schema si presenta frequentemente in una delle due forme
7
Ra
Ra
Ia
Ia
E
Ua
E
Ua
Per semplicità in questi due schemi non è stata ridisegnato il circuito di eccitazione
Nota sulla fcem sviluppata dal motore:
Quando il rotore gira , l’avvolgimento di armatura muovendosi all’interno del campo magnetico generato
dal circuito di eccitazione genera una tensione proporzionale alla velocità di rotazione posseduta dal
rotore in quell’istante, di polarità opposta alla tensione Ua applicata dall’esterno. Essa è proporzionale
inoltre al flusso induttore Φ e può essere espressa dalla relazione
E = k1 n Φ
essendo k1 una costante dipendente dalle caratteristiche del motore
Supponiamo che il flusso di eccitazione Φ rimanga costante; ( ciò può essere ottenuto o perché il sistema
di eccitazione è a magneti permanenti, o perché il motore, nel caso di eccitazione mediante bobine di
campo, è provvisto di appositi avvolgimenti di compensazione che hanno l’effetto di mantenere il flusso
costante anche quando il sistema passa a funzionare da vuoto a carico). Allora la fcem è funzione solo
della velocità di rotazione n.
Poniamo
k1Φ = K e
[ V / giri / min = V min / giri ]
[1]
e otteniamo una relazione che esprime la proporzionalità diretta tra la velocità espressa in numero di giri
al minuto e la forza controelettromotrice indotta E:
E = Ke n
[2]
Ora la costante Ke dipende anche dalle caratteristiche magnetiche della macchina.
La costante Ke è chiamata costante di tensione del motore a corrente continua.
L’equazione fondamentale del motore a corrente continua a regime permanente
L’equazione fondamentale del motore in corrente continua a regime permanente altro non è che la legge
di Ohm applicata al circuito in corrente continua che rappresenta il modello elettrico del motore a regime
permanente
Ua = E + Ra Ia
[3]
8
Nota
Significato fisico ed elettrico di funzionamento a regime ( permanente )
Il regime permanente è quella situazione di funzionamento in cui la coppia motrice sviluppata dal motore
uguaglia perfettamente la coppia resistente esterna esercitata dal carico meccanico applicato all’asse +la
coppia resistente dovuta alle perdite.
C = Cu +Cp
In questa situazione la velocità di rotazione del motore è costante, è costante la corrente assorbita e
costante sarà pure la fcem E:
Ia = costante
E = costante = Ke n
e sull’induttanza La non v’è caduta di tensione perché la corrente assorbita è costante.
Se teniamo conto dell’espressione della forza controelettromotrice l’equazione fondamentale del motore a
corrente continua diventa
[4]
Ua = Ke n + Ra Ia
La potenza elettromagnetica:
Se moltiplichiamo l’espressione [4] per Ia otteniamo
Ua Ia = Ke n Ia + Ra (Ia) 2
equazione di equilibrio delle potenze
( bilancio delle potenze )
Il termine Ua Ia rappresenta la potenza elettrica assorbita dal motore
Pa = Ua Ia
potenza assorbita
Il termine Ra (Ia) 2 rappresenta la potenza elettrica dissipata per effetto Joule sulla resistenza interna del
motore
Pj = Ra (Ia) 2
potenza dissipata per effetto Joule
( è chiamata anche Pcu, perdite nel rame)
La quantità Ke n Ia = ( E Ia ) rappresenta la potenza elettromagnetica trasmessa al rotore
Pem
=
E Ia
= Ke n Ia
potenza elettromagnetica
La coppia elettromagnetica nel motore e corrente continua
Ricordiamo dalla meccanica la relazione che lega la potenza ad una coppia che agisce su un organo
rotante per tenerlo in rotazione ad una certa velocità
9
Potenza = coppia C per velocità angolare ω
Applichiamo questa relazione al nostro sistema in cui c’è un organo ( il rotore ) che si trova in rotazione
con velocità angolare ω. Affinché esso possa stare in rotazione occorre che sia sottoposto ad una coppia.
Introducendo perciò il concetto di coppia elettromagnetica potremo scrivere la relazione
Pem = Cem ω
[5]
Pem
e quindi
Cem =
ω
Essa si può scrivere
Ke n Ia
Cem =
ω
Sapendo che la velocità angolare ω è legata alla velocità di rotazione n dalla relazione
2π
πn
ω=
[rad /s ]
60
otteniamo
Ke n Ia
Cem =
2π
πn
60
e ancora, dopo aver semplificato la n
60 Ke Ia
Cem =
2π
π
Chiamando con Kc la parte costante dell’espressione e cioè:
60 Ke
Kc =
2π
π
otteniamo definitivamente l’espressione della coppia elettromagnetica:
Cem = Kc Ia
[Nm]
[6]
La coppia elettromagnetica è direttamente proporzionale alla corrente assorbita.
Bisogna notare che la coppia elettromagnetica non è la coppia meccanica trasmessa al rotore ma è più
grande; essa infatti comprende sia la coppia meccanica utile, sia la coppia meccanica resistente dovuta a
attrito e ventilazione, sia le perdite di natura elettrica ( nel rame e nel ferro ) che si hanno nel circuito
elettrico e magnetico di armatura.
10
Riassumiamo nello specchietto seguente le relazioni caratteristiche del motore a corrente continua
Ua = E + Ra Ia
E = Ke n
equazione di equilibrio elettrico del motore
forza controelettromotrice indotta
K e = kΦ
Φ
costante di tensione
C = Kc Ia
coppia elettromagnetica
Kc = 60 Ke / 2π
π
= 60 kΦ
Φ/
2π
π
Pem = E Ia = Ke n Ia
costante di coppia
potenza elettromagnetica
Altre relazioni significative che si possono dedurre dall’equazione di equilibrio sono:
Ua – Ke n
Ia =
corrente assorbita quando il motore gira ad una certa velocità
Ra
Ua – Ra Ia
n =
velocità di rotazione in giri al minuto
( giri / min )
quando il motore assorbe una certa corrente ed una certa potenza
Ke
Relazioni tra le potenze nel motore a corrente continua
Pa = Presa + Pav + Pcu + Pfe
potenza assorbita dal motore ( non è compresa la
potenza di eccitazione )
Pa = Pem + Pcu
Pem = Presa + Pav + Pfe
Presa = Pem - Pav - Pfe
potenza elettromagnetica
potenza meccanica resa dal motore
Rendimento del motore
Presa
η
=
rendimento del motore
Pa + Pe
Presa = η ( Pa + Pe )
La Presa è la potenza meccanica utile resa all’albero del motore ( potenza utile ). La conoscenza
della Presa permette di calcolare la coppia resa o coppia utile Cu
11
La coppia utile o coppia resa
Presa
Cu
=
60 Presa
=
ω
coppia utile o coppia resa
2π
πn
Spunto del motore
Consideriamo la macchina inizialmente ferma e applichiamo ai suoi morsetti una tensione Ua.
Essendo il rotore fermo la fcem, al momento della chiusura dell’interruttore di marcia, è uguale a zero, e
nel circuito di armatura circola una corrente chiamata corrente di spunto Is ( o corrente di avviamento )
limitata esclusivamente dalla resistenza interna del motore
Ua – Ke n
Ia =
corrente assorbita quando il motore gira ad una certa velocità
Ra
Essendo n = 0
Ua
Is =
corrente di spunto
Ra
Essendo la Ra nella totalità dei casi molto piccola la corrente di spunto assume un valore iniziale molto
grande che può essere incompatibile con l’integrità della macchina , o può dar luogo a intervento non
desiderato delle protezioni.
L’interazione tra questa corrente e il campo magnetico di eccitazione genera una coppia ( coppia di
spunto) Cs.
Questa coppia è espressa dalla relazione
Cs = Kc Is
coppia di spunto
per effetto della quale il motore entra rapidamente in rotazione con velocità via via crescente e tendente a
una velocità finale il cui valore dipende dalla coppia resistente.
L’avvolgimento, ruotando all’interno del campo magnetico, genera in ogni istante la fcem E
proporzionale alla velocità raggiunta in quell’istante. Man mano che la velocità aumenta, aumenta anche
la fcem E mentre la corrente assorbita I è obbligata a decrescere. Infatti esprimendo la corrente I
dall’equazione di equilibrio elettrico in un certo istante del transitorio si ha
Ua – Ke n
Ia =
se n cresce Ia diminuisce
Ra
Il motore raggiunge una velocità finale detta velocità di regime in corrispondenza della quale la coppia
motrice uguaglia perfettamente la coppia resistente.
12
Riduzione della corrente di spunto
La corrente di spunto può essere limitata a valori non pericolosi per il motore e per la linea inserendo in
serie al motore un reostato ( reostato di avviamento ) che introduce nel circuito di armatura una
resistenza addizionale Rs. Questa al momento dello spunto viene a trovarsi in serie alla resistenza propria
di armatura riducendo così il valore della corrente assorbita.
Infatti allo spunto avremo una nuova corrente
Ua
I’s =
corrente di spunto con reostato di avviamento
Ra + Rs
Il reostato di avviamento viene rapidamente disinserito a gradini mediante temporizzatore con comando
automatico
Funzionamento a vuoto.
Se la macchina funziona a vuoto (nessun carico meccanico utile applicato all’albero) deve sviluppare una
coppia motrice sufficiente ad equilibrare la coppia resistente ( parassita ) dovuta agli attriti e alla
ventilazione e alle perdite nel ferro.
Al termine del transitorio il motore si porta quindi a girare alla velocità a vuoto no a cui corrisponde una
forza controelettromotrice a vuoto Eo e una corrente assorbita a vuoto Io
Eo = Ke no
forza controelettromotrice a vuoto
L’equazione di equilibrio del motore si scrive
Ua = Ke no + Ra Io
La costante Ke rimane la stessa in qualunque condizione di funzionamento.
Funzionamento sotto carico. Perdita di velocità.
Partiamo da macchina funzionante a vuoto. Se applichiamo all’albero la coppia resistente utile o frenante
Cu il rotore subisce un rallentamento. Anche ammettendo che il flusso di citazione rimanga costante la
fcem E si riduce dal valore Eo ad uno minore e nel motore viene a circolare di conseguenza una corrente
I > Io che a sua volta viene a generare una coppia elettromagnetica C > Co.
Inizia così un transitorio elettrico e meccanico caratterizzato da una costante di tempo elettrica τe e da
una costante di tempo meccanica τm al termine del quale:
13
il motore si stabilizza alla velocità finale ( velocità di regime) nf, minore di no, a cui assorbe una
corrente Ia che gli permette di generare una coppia meccanica esattamente uguale ed opposta alla
coppia resistente Cu +Cav
Cmecc = Cu +Cav
Il motore presenta quindi una perdita di velocità ∆n = no - n
e un forte aumento della corrente
assorbita ∆I = Ia – Io. Questo aumento di corrente è reso necessario dal fatto che il motore, sviluppando
una maggiore potenza meccanica, deve assorbire una maggiore potenza elettrica.
La variazione della corrente assorbita e la perdita di velocità dipendono, in maniera proporzionale, dalla
coppia utile applicata al motore.
Per la corrente la relazione è immediata:
Co = Kc Io
Cem = Kc Ia
Cu
quindi
∆I =
oppure
Kc
Cu = Kc ∆I
Cu
Ia = Io +
Kc
Per la velocità di rotazione dimostreremo più avanti che
Ra
∆n =
Cu
oppure
Kc Ke
Ra
n = no –
Cu
Kc Ke
Ra
Se
poniamo
Kn=
otteniamo
∆n = Kn Cu
e
n = no – Kn Cu
Kc Ke
Caratteristica meccanica.
La caratteristica meccanica è il grafico che mette in relazione tra di loro la velocità di rotazione n
con la coppia resa o utile Cu: n = f ( Cu ) o, viceversa, Cu = f(n).
E’ facile trovare la caratteristica espressa nella seconda forma, ragionando per comodità sulla coppia elettromagnetica:
Ua – Ke n
Ua
KcKe
Cem = Kc Ia = Kc
= Kc
n
Ra
Ra
Ra
Ua
ma
Kc Ke
= Is ( corrente di spunto )
e
1
=
Ra
Ra
e
Kc Is = Cs coppia di spunto
Kn
Quindi otteniamo
1
Cem = Kc Is -
1
n
Kn
cioè
Cem = Cs -
n
Kn
14
Caratteristica elettromeccanica
La caratteristica elettromeccanica è il grafico che mette in relazione tra di loro la corrente assorbita
a carico con la coppia resa o utile Cu: I = f ( Cu ):
Si è gia detto che quando il motore da vuoto passa funzionare a carico per l’applicazione di una coppia
resistente utile all’albero, esso assorbe una corrente Ia più grande di quella a vuoto
Cm,u
I = Io +
questa è l’espressione della
Kc
CARATTERISTICHE
caratteristica elettromeccanica
ESTERNE
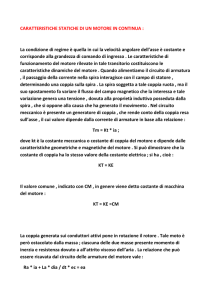
La caratteristica meccanica e quella elettromeccanica sono chiamate caratteristiche esterne.
Esse mettono graficamente in evidenza il comportamento del motore in qualunque condizione di
funzionamento: a vuoto, a carico, in corto circuito ( rotore bloccato ), spunto. Sono rette che, a parte la
pendenza che dipende dalla scala, hanno l’andamento della figura:
n ( giri / min )
Ia ( A )
Is
no
∆n
n
I
Io
Cu
CS
C (N*m)
Caratteristica meccanica coppia – numero di giri
n = no - KnCu
Cu
Cs
C (N*m)
Caratteristica elettromeccanica coppia-corrente
I = Io + Cu / Kc
o anche
1
Cu = Cs -
n
Kn
La caratteristica meccanica incontra l’asse delle ordinate in ( 0; no) e l’asse delle ascisse in ( Cs;0 ).
15
COME VARIANO LE CARATTERISTICHE AL VARIARE DELLA TENSIONE DI
ALIMENTAZIONE ( mantenendo costante il flusso ) Regolazione a coppia costante
Se cambiano i valori della tensione di alimentazione Ua la caratteristica trasla parallelamente a sé stessa (
perché il coefficiente angolare non cambia ), verso l’alto se la Ua cresce e verso il basso se la Ua
decresce, mentre variano in modo direttamente proporzionale la coppia di avviamento e la velocità a
vuoto.
Quindi le caratteristiche meccaniche disegnate per diversi valori di Ua sono rappresentate da rette
parallele tra loro
n
Ua3 >Ua2 >Ua1
n2
no
n1
Ua3
Ua2
Ua1
3
2
1
Cu
C’u
CS1
CS2 CS4
Coppia
Caratteristica meccanica coppia – numero di giri per valori diversi di tensione Ua
La figura mostra chiaramente come bisogna aumentare la tensione di alimentazione Ua quando ,
aumentando la coppia resistente utile si voglia mantenere costante la velocità ω
Es. La macchina lavora a vuoto alla tensione Ua1. La velocità di rotazione a vuoto è no ( caratteristica n.
1 ). Se viene applicata la coppia resistente utile Cu si ha una perdita di velocità, e la velocità di rotazione
diventa n1. Se si vuole riportare la macchina a lavorare alla velocità posseduta vuoto bisogna applicare
una tensione Ua più grande e tale che la caratteristica diventi la n. 2 Se poi la coppia resistente utile
diventa ancora più grande e passa a C’u bisogna aumentare ancora la tensione di alimentazione e portare
il motore a lavorare sulla caratteristica n. 3. Il processo è messo in evidenza dai segmenti marcati .
Questo modo di regolazione della velocità di rotazione è detto a coppia costante ( perché Kc rimane
costante).
16
COME VARIANO LE CARATTERISTICHE AL VARIARE DEL FLUSSO DI ECCITAZIONE
( mantenendo costante la tensione di alimentazione ) Regolazione a potenza costante
Se si mantiene costante la tensione di alimentazione e si varia il flusso di eccitazione cambiano di
conseguenza le costanti Ke e Kc . Esse aumentano entrambe all’aumentare del flusso di eccitazione. Si
hanno perciò due conseguenze importanti:
--- essendo no = Ua / Ke un aumento del flusso, determinando l’aumento di Ke , determina anche
una diminuzione di no
--- essendo Cs = Kc Is un aumento del flusso, determinando l’aumento di Kc , determina anche
un aumento di Cs .
n ( giri / min )
Фe,1
Фe,2> Фe,1
A parità di tensione di alimentazione la
caratteristica meccanica assume una
inclinazione minore se il flusso viene
aumentato. Ciò si traduce in un valore più
basso della costante del motore Kn per cui il
motore diventa meno sensibile alle variazioni
di carico e presenta una minore perdita di
velocità .
C ( Nm )
17
FUNZIONAMENTO SU QUATTRO QUADRANTI : MOTORE; GENERATORE ; FRENO
Partendo dalla condizione di funzionamento da motore ( primo quadrante, es. punto PM della caratteristica
meccanica) la macchina può passare con continuità al funzionamento da generatore (secondo quadrante,
es. punto PG della caratteristica meccanica ) o da freno (quarto quadrante, es. punto PF della caratteristica
meccanica).
n ( giri / min )
GENERATORE
Ia
U
MOTORE
PG
Ua
no PV
E
Cest < Cs
Cem ; n
E
2
Cest; n
PM
Cem
Ua = E + Ra Ia
1
E = U + Ra Ia
Cest <0
0
Cest > Cs
PS
CS
CU
C (N*m)
PF
n<0
FRENO
Ia
1° quadrante ( e 3° ) funzionamento da motore
2° quadrante funzionamento da generatore
4° quadrante funzionamento da freno
U
E
Cest> Cs
;
n
Cem
Ua + E = Ra Ia
Funzionamento da FRENO
Consideriamo il motore in corrente continua ad eccitazione indipendente in una condizione generica di
funzionamento ( punto PM ). Se aumenta la coppia resistente applicata all’albero il punto di lavoro si
sposta sulla caratteristica come mostra la linea orientata 1; il motore rallenta assorbendo una maggiore
corrente per potere sviluppare una maggiore coppia motrice e ristabilire l’equilibrio con la coppia esterna.
Man mano che la coppia resistente esterna aumenta il motore rallenta sempre più. Se la coppia esterna
assume un valore pari alla coppia di avviamento il motore cessa di ruotare assorbendo la corrente di
spunto Is. A partire da questa situazione di funzionamento se la coppia applicata all’albero del motore
assume un valore superiore alla coppia di avviamento, la macchina si mette in rotazione con verso
18
contrario e il punto di lavoro si porta per esempio in PF. Avendo invertito il senso di rotazione anche la
fcem generata inverte il suo segno e diventa concorde con la tensione applicata ( quindi diventa a
tutti gli effetti una fem ). La corrente ( vedere la caratteristica elettromeccanica ) conserva il suo verso ma
assume valori molto elevati. La macchina funziona da freno assorbendo sia potenza elettrica sia potenza
meccanica, che sono dissipate sotto forma di calore.
Esempio: è questo il caso di un motore in corrente continua che solleva un carico. Il carico viene sollevato fino a quando la
coppia resistente da esso esercitata sull’asse è minore della coppia di avviamento. Ma se il carico assume un valore maggiore la
coppia esterna risulta maggiore della coppia di spunto e il motore si mette a girare in senso contrario ( scende invece di salire ).
La coppia elettromagnetica sviluppata dal motore diventa coppia frenante.
Funzionamento da GENERATORE
Consideriamo il motore in corrente continua ad eccitazione indipendente in una condizione generica di
funzionamento ( punto PM ). Se diminuisce la coppia resistente applicata all’albero il punto di lavoro si
sposta sulla caratteristica come mostra la linea orientata 2; il motore aumenta la sua velocità assorbendo
una minore corrente per potere sviluppare una minore coppia motrice e ristabilire l’equilibrio con la
coppia esterna.
Man mano che la coppia resistente esterna diminuisce, restando invariata la tensione applicata
dall’esterno, il motore aumenta sempre più la sua velocità. Il motore si avvicina sempre più alla
condizione di funzionamento a vuoto.
Se la coppia esterna diventa nulla il motore ruota alla velocità a vuoto no., sviluppando solo la piccola
coppia necessaria ad equilibrare le perdite , in queste condizioni è Eo ≈ Ua e la corrente è molto piccola
( Io ).
Se ora dall’esterno applichiamo all’albero della macchina una coppia di segno concorde con il senso di
rotazione posseduto dal rotore la velocità della macchina continua ad aumentare ( il punto di lavoro
diventa PG ) , la fem indotta diventa maggiore della tensione applicata esterna Ua conservando il
segno.
La corrente, I = ( E – Ua ) / Ra , dopo aver assunto il valore zero diventa negativa ( vedere la
caratteristica elettromeccanica ) , e inverte pertanto la sua direzione. Questo significa che la corrente esce
dalla macchina dal morsetto + e quindi la macchina funziona da generatore, assorbendo energia
meccanica e fornendo energia elettrica alla rete che genera la tensione U.
19