Appunti del corso ”Algebre e gruppi di Lie“
Denis Nardin
19 luglio 2011
2
Indice
1 Algebre di Lie
1.1 Algebra inviluppante universale . . . . . . . . .
1.2 Algebre nilpotenti, risolubili, semisemplici . . .
1.2.1 Algebre nilpotenti . . . . . . . . . . . .
1.2.2 Algebre risolubili . . . . . . . . . . . . .
1.2.3 Algebre semisemplici . . . . . . . . . . .
1.3 Rappresentazioni di sl2 (k) . . . . . . . . . . . .
1.4 MANCANTE: La decomposizione di Jordan . .
1.5 Decomposizione di Cartan . . . . . . . . . . . .
1.6 Teoria assiomatica dei sistemi di radici . . . . .
1.7 MANCANTE: teoremi di coniugio, isomorfismo
1.8 Teoria delle rappresentazioni . . . . . . . . . .
.
.
.
.
.
.
.
.
.
e
.
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
esistenza
. . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5
5
6
6
7
10
13
14
15
18
22
23
2 Gruppi di Lie
2.1 Gruppi e sottogruppi di Lie . . . .
2.2 Algebra di Lie di un gruppo di Lie
2.3 Rivestimenti di un gruppo di Lie .
2.4 SLn (C) . . . . . . . . . . . . . . .
2.5 Algebre di Clifford e gruppi spin .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
29
29
34
35
37
39
3
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4
INDICE
Capitolo 1
Algebre di Lie
Un’algebra di Lie g è uno spazio vettoriale equipaggiato di un’applicazione
bilineare [−, −] : g × g → g tale che
• [xx] = 0 per ogni x ∈ g.
• [x[yz]] + [y[zx]] + [z[xy]] = 0 per ogni x, y, z ∈ g (identità di Jacobi).
Un sottospazio h di un’algebra di Lie è detto ideale se per ogni x ∈ g [xh] ⊆ h.
Se h è un’ideale lo spazio quoziente g/h possiede una struttura naturale di
algebra di Lie. Una rappresentazione di un’algebra di Lie è un omomorfismo di
algebre di Lie g → gln (k), dove gln (k) è l’algebra di Lie delle matrici n × n con
[AB] = AB − BA.
1.1
Algebra inviluppante universale
Osserviamo che ogni algebra associativa A su k è in modo naturale un’algebra
di Lie, con la struttura data da [xy] = xy − yx.
L’algebra inviluppante universale di un’algebra di Lie g è un’algebra
associativa U(g) con un omomorfismo di algebre di Lie g → U(g) tale che per
ogni algebra associativa A e per ogni omomorfismo di algebre di Lie g → A
esiste un unico omomorfismo di algebre associative U(g) → A che fa commutare
il diagramma
g
U(g)
A
Teorema 1. Per ogni algebra di Lie esiste un’algebra inviluppante universale
U(g), unica a meno di isomorfismo.
5
6
CAPITOLO 1. ALGEBRE DI LIE
Dimostrazione. L’unicità a meno di isomorfismo è chiara perchè U(g) è definita
tramite una proprietà universale. Sia T (g) l’algebra tensoriale su g vista come
spazio vettoriale. Definiamo
U(g) = T (g)/(xy − yx − [xy] | x, y ∈ g)
dove quozientiamo rispetto all’ideale bilatero generato. È chiaro che g → U(g) è
un omomorfismo di algebre di Lie. D’altro canto, se A è un’algebra associativa e
g → A è un omomorfismo di algebre di Lie, prima di tutto si estende unicamente
a un omomorfismo di algebre associative da T (g) → A, inoltre passa al quoziente
a un omomorfismo U(g) → A, per cui g → U(g) è proprio la nostra algebra
inviluppante universale.
Teorema 2 (Poincarè-Birkhoff-Witt). Sia g un’algebra di Lie e sia {z1 , . . . , zn }
una base di g come spazio vettoriale. Allora una base di U(g) come spazio
vettoriale è data da
{z1t1 · · · zntn | t1 , . . . , tn ∈ N}
In particolare g → U(g) è una mappa iniettiva.
1.2
Algebre nilpotenti, risolubili, semisemplici
Se g è un’algebra di Lie, il suo centro è
Z(g) = {x ∈ g | ∀y ∈ g [xy] = 0}
Se Z(g) = g, g è detta abeliana. Un’algebra di Lie g si dice semplice se non
ha sottoalgebre non banali e se non è abeliana.
1.2.1
Algebre nilpotenti
Un’algebra di Lie g è detta nilpotente se la successione centrale, definita da
g0 = g
gi+1 = [ggi ]
è definitivamente nulla (cioè esiste n > 0 tale che g n = 0.
Proposizione 1. Sia g un’algebra di Lie
1. Se g è nilpotente allora lo sono tutte le sua sottoalgebre e i suoi quozienti.
2. Se g/Z(g) è nilpotente allora lo è anche g.
3. Se g è nilpotente e non banale allora Z(g) 6= 0.
Dimostrazione. È chiaro che se h ⊆ g, allora hi ⊆ gi e analogamente se h
è un quoziente di g allora hi è un quoziente di gi , per cui il punto 1 segue
immediatamente. Inoltre se g/Z(g) è nilpotente esiste i tale che gi ⊆ Z(g),
quindi gi+1 = 0. Infine se g è nilpotente esisterà i tale che gi 6= 0 ma gi+1 = 0,
per cui gi ⊆ Z(g).
1.2. ALGEBRE NILPOTENTI, RISOLUBILI, SEMISEMPLICI
7
Lemma 1. Sia g una sottoalgebra di gl(V ) composta di elementi nilpotenti.
Allora esiste v ∈ V tale che gv = 0.
Dimostrazione. Dimostriamolo per induzione su dim g. Il caso dim g = 0 è
ovvio. Sia h una sottoalgebra massimale. Allora h agisce in modo naturale sullo
spazio vettoriale g/h, per cui per l’ipotesi induttiva (essendo dim h < dim g),
possiamo trovare un x ∈ g tale che [hx] ⊆ h. Di conseguenza il normalizzatore
di h contiene propriamente h. Ma h era massimale, per cui h è un ideale di g.
Ma allora dim h = dim g − 1, perchè se dim g/h > 1 possiamo trovare una
sottoalgebra propria (e.g. quella generata da un elemento), e la controimmagine
sarebbe una sottoalgebra tra g e h, contro la massimalità di h. Quindi dim g =
dim h + 1, per cui possiamo trovare x ∈ g tale che
g = x ⊕ h.
Ora, per ipotesi induttiva, l’insieme
{v ∈ V | hv = 0}
è non vuoto. Inoltre è x-invariante, infatti se hv = 0, abbiamo
hxv = [hx]v + xhv = 0
per ogni h ∈ h. Quindi, poichè x è nilpotente, possiamo trovare v tale che
xv = 0 e hv = 0, cioè gv = 0.
Corollario 1. Sia g una sottoalgebra di gl(V ) fatta di elementi nilpotenti. Allora possiamo trovare una bandiera 0 = V0 ⊆ V1 ⊆ · · · ⊆ Vn tale che gVi ⊆ Vi−1 .
In particolare g è nilpotente.
Dimostrazione. Per induzione su dim V . Prendiamo v dal lemma tale che gv =
0. Allora g agisce in modo naturale su V /hvi. Sollevando la bandiera data
dall’ipotesi induttiva, abbiamo la tesi.
Teorema 3 (Engel). Sia g un algebra di Lie. Allora è nilpotente se e solo se
tutti gli elementi sono ad-nilpotenti.
Dimostrazione. Se g è nilpotente è chiaro che tutti gli elementi sono ad-nilpotenti.
Per il viceversa andiamo per induzione su dim g. Se tutti gli elementi sono adnilpotenti, allora ad g è una sottoalgebra di elementi nilpotenti di gl(g). Per
il lemma possiamo trovare x ∈ g tale che (ad g)x = 0, cioè [gx] = 0, cioè
x ∈ Z(g). Ma allora g/Z(g) è un’algebra di Lie di dimensione inferiore in cui
tutti gli elementi sono ad-nilpotenti. Allora g/Z(g) è nilpotente. Ma allora g è
nilpotente.
1.2.2
Algebre risolubili
Un’algebra di Lie g si dice risolubile se la successione derivata, definita da
g(0) = g
g(i+1) = [g(i) g(i) ]
è definitivamente nulla, cioè se esiste n tale che g(n) = 0.
8
CAPITOLO 1. ALGEBRE DI LIE
Proposizione 2. Sia g un’algebra di Lie
1. Se g è risolubile allora lo sono anche tutte le sue sottoalgebre e i suoi
quozienti.
2. Se h è un ideale risolubile di g tale che g/h è risolubile allora anche g è
risolubile.
3. Se h1 , h2 sono due ideali risolubili allora anche h1 +h2 è un ideale risolubile.
Dimostrazione. Il punto 1 è ovvio (se h ⊆ g allora h(i) ⊆ g(i) e analogamente
per i quozienti). Per quanto riguarda il punto 2, sappiamo che esiste i tale che
(g/h)(i) = 0, cioè g(i) ⊆ h(i) . Quindi g è risolubile.
Per quanto riguarda il punto 3, consideriamo la successione esatta
0 → h1 → h1 + h2 → (h1 + h2 )/h1 → 0
allora h1 è risolubile, d’altro canto (h1 +h2 )/h1 = h2 /(h1 ∩h2 ) è risolubile perchè
quoziente di risolubile. Quindi h1 + h2 è risolubile.
Quindi esiste un unico ideale risolubile massimale chiamato il radicale di g
(Rad(g)).
D’ora in poi il campo base k sarà algebricamente chiuso di caratteristica 0.
Lemma 2. Sia g una sottoalgebra risolubile di gl(V ). Allora esiste un v ∈ V
che sia autovalore comune per tutti gli elementi di g.
Dimostrazione. Dimostriamolo per induzione su dim g. Possiamo trovare un
ideale h di dimensione 1. Infatti [gg] è un ideale proprio (se no g non sarebbe
risolubile) e g/[gg] è un’algebra abeliana, per cui ogni suo sottospazio (e in
particolare un sottospazio di codimensione 1) è un ideale. Per ipotesi induttiva
h ha un autovettore comune v , cioè esiste λ ∈ h∨ tale che
W = {v ∈ V | hv = λ(h)v per ogni h ∈ h}
è non banale. Fissiamo x ∈ g tale che g = h ⊕ x. Se dimostriamo che W è
invariante per x possiamo concludere come prima (basta trovare un autovettore
per x in W e possiamo perchè il campo è algebricamente chiuso). Ma se v ∈ V
h(xv) = x(hv) + [hx]v = λ(h)xv + λ([xv])v
perchè h è un ideale e perciò [hx] ∈ h. Ci rimane da dimostrare solo che
λ([hx]) = 0.
Fissiamo v ∈ V non nullo e consideriamo per ogni i ≥ 0 lo spazio
Wi = Span(v, xv, . . . , xi v) .
Inoltre sia m tale che {v, . . . , xm v} sia una base dell’unione di tutti i Wi .
Vorremmo dire che h agisce in modo diagonale su Wm e che per ogni h ∈ h
trWm h = mλ(h). Infatti un’immediata induzione dà che ∀h ∈ h
hxi − λ(h)xi ∈ Wi−1 .
1.2. ALGEBRE NILPOTENTI, RISOLUBILI, SEMISEMPLICI
9
Quindi in particolare
trWm [hx] = mλ([hx]) .
Ma, poichè [hx] è il commutatore di due endomorfismi di Wm , ha traccia nulla.
Quindi mλ([hx]) = 0. Poichè ora k ha caratteristica 0 abbiamo λ([hx]) = 0
come cercato.
Teorema 4 (Lie). Sia g una sottoalgebra risolubile di gl(V ). Allora g stabilizza
una bandiera
Dimostrazione. Andiamo per induzione su dim V . Per il lemma precedente
possiamo trovare v ∈ V non nullo tale che sia un autovettore comune per tutta g.
Quindi in particolare hvi è g-invariante. Ma allora applicando l’ipotesi induttiva
a V /hvi abbiamo la tesi.
Corollario 2. Sia g un’algebra di Lie risolubile, allora ha una bandiera di ideali.
In particolare g è risolubile se e solo se [gg] è nilpotente.
Dimostrazione. Se g è risolubile possiamo applicare il teorema di Lie a ad g.
Una bandiera di sottospazi di g stabilizzata da ad g è esattamente una bandiera
di ideali.
Quindi se g è risolubile sia
0 = g0 ⊆ g1 ⊆ · · · ⊆ gn = g
la bandiera di ideali. Se scegliamo una base di g tale che gi = hx1 , . . . , xi i, in
questa base tutte le matrici di ad g sono triangolari superiori, perciò tutte le
matrici di ad[gg] = [ad g ad g] sono strettamente triangolari superiori e perciò
nilpotenti. Quindi ad[gg] è nilpotente e perciò anche [gg] è nilpotente.
Inoltre è chiaro dalle definizioni che se [gg] è nilpotente allora g è risolubile.
La forma di Killing di un’algebra di Lie è una forma bilineare simmetrica
data da
κ(x, y) = trg (ad x ad y) .
Con un semplice conto si verifica che vale
κ([xy], z) = κ(x, [yz]) .
Teorema 5 (Criterio di Cartan). Sia g una sottoalgebra di gl(V ) con dim V <
∞. Supponiamo che tr(xy) = 0 per ogni x ∈ [gg] e ogni y ∈ g. Allora g è
risolubile.
Corollario 3. Sia g un’algebra di Lie tale che [gg] stia nel nucleo della forma
di Killing. Allora g è risolubile.
10
CAPITOLO 1. ALGEBRE DI LIE
1.2.3
Algebre semisemplici
Un’algebra di Lie g è detta semisemplice se il suo radicale Radg è nullo1 .
Proposizione 3. Un’algebra di Lie g è semisemplice se e solo se la sua forma
di Killing è non degenere.
Dimostrazione. Sia A il nucleo della forma di Killing di g (i.e. A = g⊥ ). È
chiaro che è un ideale di g, perchè per ogni x, z ∈ g e ogni y ∈ A
κ([xy], z) = κ(x, [yz]) = 0 .
Osserviamo che ad A è risolubile per il criterio di Cartan. Ma allora anche
A è risolubile. Quindi A è contenuta nel radicale di g. In particolare se g è
semisemplice κ è non degenere.
Il viceversa vale solo in caratteristica 0. Prendiamo un ideale abeliano h di g e
facciamo vedere che h ⊆ A. Questo chiaramente implica la tesi perchè un’algebra
senza ideali abeliani è semisemplice (ogni algebra risolubile ha un’ideale abeliano
non banale!). Ora se x ∈ h e y ∈ g vorremmo far vedere che κ(x, y) = 0. Ma
ad x ad y(g) ⊆ h e quindi (ad x ad y)2 g ⊆ [hh] = 0. Perciò
κ(x, y) = tr(ad x ad y) = 0 .
Lemma 3. Sia g algebra di Lie e h ideale. Allora la forma di Killing di h
coincide con la restrizione ad h × h della forma di Killing di g.
Dimostrazione. Siano x, y ∈ h. Voglio far vedere che adg x adg y ha la stessa
traccia di adh x adh y. Infatti prendiamo una base di h e completiamola ad una
base di g. In questa base le matrici di adg x e adg y sono della forma
∗ ?
0 0
dove al posto dell’asterisco ci sono le matrici di adh x e adh y. Questo implica
la tesi.
Teorema 6. Sia g un’algebra di Lie semisemplice. Allora esistono h1 , . . . , ht
ideali semplici di g tali che
g = h1 ⊕ · · · ⊕ ht .
Inoltre ogni ideale semplice di g è uno degli hi .
Dimostrazione. Andiamo per induzione su dim g. Se g è semplice abbiamo la
tesi. Prendiamo h1 un ideale di g e consideriamo h = h⊥
1 l’ortogonale rispetto
1 Ricordiamo
che il radicale di un’algebra di Lie è il massimo ideale risolubile.
1.2. ALGEBRE NILPOTENTI, RISOLUBILI, SEMISEMPLICI
11
alla forma di Killing. Il criterio di Cartan applicato a h ∩ h1 ci dice che è un
ideale risolubile, per cui h ∩ h1 = 0. Ma allora
g = h ⊕ h1
e la forma di Killing è non degenere se ristretta ad h o h1 . Perciò per ipotesi
induttiva g si scrive come somma di ideali semplici.
Sia ora h un ideale semplice di g. Allora
[hg] = [hh1 ] ⊕ · · · [hht ]
Ma se h 6= hi per nessun i ne segue che [hhi ] ⊆ h ∩ hi = 0. Quindi [hg] = 0, cioè
h abeliano, assurdo perchè h è semplice.
Osserviamo che in particolare se g è semisemplice [gg] = g.
Consideriamo ora una rappresentazione φ : g → gl(V ) e supponiamo che sia
fedele (i.e. che φ sia iniettivo). Prendiamo per ogni x, y ∈ g
β(x, y) = trV (φ(x)φ(y)) .
Questa è una forma bilineare simmetrica associativa (i.e. β([xy], z) = β(x, [yz]))
e non degenere. Per vederlo basta mimare le dimostrazioni per la forma di
Killing (che è il caso φ = ad).
Ora sia x1 , . . . , xn base di g e sia y1 , . . . , yn base duale rispetto a β. Allora
l’elemento di Casimir di φ è
X
cφ =
φ(xi )φ(yi ) ∈ gl(V ) .
i
Lemma 4. L’elemento di Casimir cφ commuta con l’azione di g (cioè è un
g-omomorfismo).
Dimostrazione. Fissiamo x ∈ g e poniamo
[xxi ] =
n
X
aij xj
[xyi ] =
j=1
n
X
bij yj .
j=1
Ma dall’equazione β([xxi ], yj ) + β([xyj ], xi ) = 0 segue che aij + bji = 0. Infine
[φ(x), cφ ] =
n
X
[φ(x), φ(xi )φ(yi )] =
i=1
=
n
X
i=1
[φ(x), φ(xi )]φ(yi ) + φ(xi )[φ(x), φ(yi )] =
n X
n
X
(aij + bji )φ(xi )φ(yi ) = 0
i=1 j=1
Lemma 5 (Schur). Sia g un’algebra di Lie e siano V, W due g moduli irriducibili. Se φ : V → W è un omomorfismo di g-moduli allora o φ è un
isomorfismo o è l’omomorfismo nullo.
12
CAPITOLO 1. ALGEBRE DI LIE
Dimostrazione. Osserviamo che ker φ è un sottomodulo di V . Poichè V è irriducibile o è tutto (e in tal caso φ è nullo) o è 0 (e in tal caso φ è iniettivo.
D’altro canto se φ è iniettivo la sua immagine è un sottomodulo non nullo di W
e quindi è tutto.
Quindi in particolare se k è algebricamente chiuso un qualunque endomorfismo φ di un g-modulo irriducibile è la moltiplicazione per uno scalare. Infatti
deve avere un’autovalore λ e allora φ − λId è un endomorfismo non iniettivo (e
perciò è 0).
Osserviamo ora che se g è semisemplice e φ : g → gl(V ) è una rappresentazione di g φ(g) ⊆ sl(V ). Infatti
φ(g) = φ([gg]) = [φ(g)φ(g)] ⊆ [gl(V )gl(V )] = sl(V ) .
In particolare se dim V = 1 φ(g) = 0.
Una rappresentazione è irriducibile se non ha sottorappresentazioni proprie. Una rappresentazione è completamente riducibile se è somma diretta di
sottorappresentazioni irriducibili.
Lemma 6. Sia g un’algebra di Lie semisemplice e sia V un g-modulo con un
g-sottomodulo W di codimensione 1. Allora W ha un g-modulo complementare
in V
Dimostrazione. Senza perdita di generalità assumiamo che V sia un g-modulo
fedele e che W sia irriducibile. Infatti se W 0 ⊆ W è un sottomodulo massimale
proprio ci basta costruire un complementare per W/W 0 in V /W 0 . Notiamo
inoltre che V /W è un g-modulo di dimensione 1, per cui dev’essere un modulo
banale.
Prendiamo ora l’elemento di Casimir cφ . Questo lascia invariato W perchè
è somma di prodotti di elementi di φ(g). Perciò, per il lemma di Schur, cφ |W
è la moltiplicazione per uno scalare. D’altro canto cφ agisce banalmente su
V /W perchè questa è un modulo 1-dimensionale su di un’algebra semisemplice.
Quindi
1
Id .
trW (cφ |W ) = trV (cφ ) ⇒ cφ |W =
dim W
Quindi W ∩ ker cφ = 0. Ma d’altro canto cφ è un g-sottomodulo di V per cui
W ⊕ cφ = V .
Teorema 7 (Weyl). Sia φ : g → gl(V ) una rappresentazione di un’algebra di
Lie semisemplice g. Allora φ è completamente riducibile.
Dimostrazione. Senza perdita di generalità assumiamo φ fedele (altrimenti basta
usare il teorema applicato a φ(g), ricordando che quozienti di algebre semisemplici sono semisemplici).
1.3. RAPPRESENTAZIONI DI SL2 (K)
13
Andiamo per induzione su dim V . Prendiamo W un sottomodulo di V
e dimostriamo che ha un complementare. Su Homk (V, W ) possiamo dare la
struttura standard di g-modulo data da
(xf )(v) = x(f (v)) − f (xv) .
Consideriamo Γ, Λ ⊆ Homk (V, W ) definito da
Γ = {f ∈ Homk (V, W ) | ∃λ ∈ k f |W = λId}
Λ = {f ∈ Homk (V, W ) | f |W = 0} .
È chiaro che Γ e Λ sono sottomoduli e che Λ ha codimensione 1 in Γ. Quindi
ha un complementare per il lemma 6. Sia f ∈ Γ tale che Γ = f ⊕ Λ. Possiamo
rinormalizzarlo di modo che f |W = Id. Osserviamo che hf i è un modulo di
dimensione uno e perciò banale. Quindi
(xf )(v) = xf (v) − f (xv) = 0
cioè f è un g-endomorfismo di V .
Vogliamo dimostrare che ker f è un complementare di W . È chiaro che
ker f ∩ W = 0. Inoltre poichè f è un g-endomorfismo, ker f è un sottomodulo.
Infine il rango di f è esattamente la dimensione di W (perchè f (V ) = W ) per
cui dim ker f + dim W = dim V , che implica
ker f ⊕ W = V
che è la tesi.
1.3
Rappresentazioni di sl2 (k)
Osserviamo che sl2 (k) è un’algebra semisemplice. Per cui per il teorema di Weyl
è sufficiente classificare tutte le rappresentazioni irriducibili.
Una base di sl2 (k) è data dalle tre matrici
0 1
0 0
1 0
x=
y=
h=
.
0 0
1 0
0 −1
Osserviamo che
[hx] = 2x, [hy] = −2y, [xy] = h .
Consideriamo lo spazio vettoriale h generato da x e h. Si vede immediatamente
che è una sottoalgebra di Lie risolubile, per cui c’è un autovettore comune v.
hv = λv
xv = µv .
Inoltre
λµv = hxv = xhv + [hx]v = (2µ + λµ)v
14
CAPITOLO 1. ALGEBRE DI LIE
per cui µ = 0.
Poniamo ora
vi =
yi
v
i!
Per induzione si vede che
hvi = (λ − 2i)vi
yvi = (i + 1)vi+1
xvi = (λ − i + 1)vi−1
v−1 = 0
Consideriamo Span(vi | i ≥ 0). Questo come si vede è un sottomodulo, per cui
dev’essere è tutto. Poniamo ora
Vα = {v ∈ V | hv = αv} .
Abbiamo visto che vi ∈ Vλ−2i . Poichè dim V < ∞ (e quindi ci sono solo un
numero finito di α tale che Vα 6= 0) deve esistere n tale che vn 6= 0 ma vn+1 = 0.
Allora
0 = xvn+1 = (λ − n)vn
per cui λ = n ∈ N. Inoltre è chiaro che dim V = n + 1, e che una base è
{v, v1 , . . . , vn }
In questa base l’azione di sl2 (k).
n
0
h 7→ .
..
0
0
n−2
..
.
···
···
..
.
0
0
..
.
0
···
−n
0
..
x 7→ .
0
0
n
···
···
···
..
.
0
..
.
1
0
0
1
y 7→ .
..
0
0
..
.
···
···
0
···
n
Queste sono chiaramente rappresentazioni irriducibili (e quindi sono tutte).
1.4
MANCANTE: La decomposizione di Jordan
Teorema 8. Sia x ∈ gl(V ). Allora esistono unici xs , xn ∈ gl(V ) tali che
xs è semisemplice (diagonalizzabile nella chiusura algebrica), xn è nilpotente e
[xs xn ] = 0. Inoltre xs , xn sono esprimibili come polinomi in x.
Teorema 9. Sia g un’algebra di Lie semisemplice. Allora per ogni x ∈ g esistono unici xs , xn tali che ad xs è semisemplice, ad xn è nilpotente e [xs xn ] = 0.
Inoltre se g è una sottoalgebra di gl(V ) questa decomposizione coincide con la
decomposizione del teorema precendente.
0
0
.. .
.
0
1.5. DECOMPOSIZIONE DI CARTAN
1.5
15
Decomposizione di Cartan
In tutta questa sezione g è un’algebra di Lie semisemplice.
Un’algebra torale è una sottoalgebra h di g composta completamente di
elementi semisemplici.
Proposizione 4. Ogni algebra torale h è abeliana.
Dimostrazione. Prendiamo x ∈ h. Vogliamo dimostrare che adh x = 0. Poichè
è diagonalizzabile ci basta far vedere non ha autovettori non nulli. Prendiamo
un autovettore y ∈ h tale che
[xy] = ay
Allora se consideriamo la restrizione di adh y a V = Span(x, y) questa è nilpotente. Siccome è anche diagonalizzabile abbiamo che adh y|V = 0, cioè a =
0.
Sia quindi h una sottoalgebra torale massimale di g. La restrizione della
rappresentazione aggiunta rende g automaticamente un h-modulo. Inoltre ad h
è composto di elementi a due a due commutanti, perciò è simultaneamente
diagonalizzabile. Possiamo quindi trovare una famiglia finita Φ ⊆ h∨ r {0} tale
che
M
g = C(h) ⊕
gα .
α∈Φ
∨
Qui per ogni α ∈ h poniamo
gα = {x ∈ g | [h, x] = α(h)x ∀h ∈ h}
e C(h) = Cg (h) = g0 è il centralizzatore di h.
Lemma 7. Siano α, β ∈ h∨ . Allora [gα gβ ] ⊆ gα+β .
Inoltre se α + β 6= 0 allora gα e gβ sono ortogonali rispetto alla forma di
Killing.
Dimostrazione. Sia x ∈ gα ,y ∈ gβ . Allora per ogni h ∈ h
[h[xy]] = [[hx]y] + [x[hy]] =
[α(h)xy] + [xβ(h)y] = (α + β)(h)[xy] .
Cioè [xy] ∈ gα+β .
Ora, se α + β 6= 0, esiste h ∈ h tale che (α + β)(h) 6= 0. Allora per ogni
x ∈ gα , y ∈ gβ
(α + β)(h)κ(x, y) = κ(α(h)x, y) + κ(x, β(h)y) =
= κ([hx], y) + κ(x, [hy]) = κ([hx], y) + κ([xh], y) = 0
che è la tesi.
Corollario 4. La restrizione di κ a C(h) è non degenere.
16
CAPITOLO 1. ALGEBRE DI LIE
Lemma 8. Sia h una sottoalgebra torale massimale. Allora C(h) = h.
Proposizione 5. Per ogni α ∈ Φ poniamo tα ∈ h definito da α(h) = κ(tα , h)
per ogni h ∈ h. Inoltre per ogni α, β ∈ h∨ poniamo (α, β) = κ(tα , tβ ).
1. Φ genera tutto h∨ come spazio vettoriale.
2. Se α ∈ Φ allora −α ∈ Φ.
3. Siano x ∈ gα , y ∈ g−α . Allora
[xy] = κ(x, y)tα .
E inoltre esistono tali x, y con [xy] 6= 0.
4. (α, α) 6= 0 per ogni α ∈ Φ.
5. Per ogni x ∈ gα esiste un unico y ∈ g−α tale che, posto
hα =
2tα
κ(tα , tα )
l’algebra generata da x, y, hα sia isomorfa a sl2 (k)
Dimostrazione. Osserviamo che se Φ non generasse tutto h∨ , esisterebbe h ∈ h
non nullo tale che α(h) = 0 per ogni α ∈ Φ. Ma allora h ∈ Z(g) = 0, assurdo.
Ora, se α ∈ Φ ma −α 6∈ Φ gα sarebbe nel nucleo della forma di Killing (è
ortogonale a tutti i gβ con β 6= −α). Ora, se x ∈ gα , y ∈ g−α , abbiamo che
[xy] ∈ g0 = h. Ma
κ([xy], h) = κ(x, [yh]) = α(h)κ(x, y)
per cui [xy] = κ(x, y)tα (stanno entrambi in h e rappresentano lo stesso funzionale tramite κ). Inoltre per ogni x ∈ gα esiste y ∈ g−α con κ(x, y) 6= 0,
perchè altrimenti x starebbe nel nucleo di κ.
Supponiamo ora che (α, α) = α(tα ) = 0. Consideriamo l’algebra S =
{tα , x, y} dove abbiamo scelto x ∈ gα , y ∈ g−α di modo che [xy] = tα . Allora
questa è risolubile, perchè [tα x] = [tα y] = 0, quindi adg S sarebbe risolubile. Ma
questo è assurdo perchè allora adg tα ∈ [adg S, adg S] sarebbe nilpotente, contro
l’ipotesi su tα .
Il punto 5 invece è ovvio.
Proposizione 6.
1. Se α ∈ Φ, allora dim gα = 1.
2. Se α ∈ Φ gli unici suoi multipli in Φ sono α e −α.
3. Se α, β ∈ Φ allora hβ, αi =
2(β,α)
(α,α)
sono interi e β − hβ, αiα ∈ Φ.
4. La α-stringa di radici per β è lunga hβ, αi, cioè l’insieme
{i ∈ Z | β + iα ∈ Φ}
è un intervallo di lunghezza hβ, αi.
1.5. DECOMPOSIZIONE DI CARTAN
17
Dimostrazione. Per ogni α ∈ Φ prendiamo Sα = hxα , yα , hα i isomorfa a sl2 (k).
Ora se consideriamo
M
M =h⊕
gcα .
c∈k×
questo è un Sα -modulo e perciò ha per pesi numeri interi. Prendiamo ora
v ∈ gcα . Questo è un autovettore di hα di autovalore
[hα v] = cα(hα )v = 2cv, .
Quindi gli autovalori di h sono {2c | gcα 6= 0} ⊆ Z. Ora, gli autovettori di
autovalore 0 sono dati da h, per cui le uniche sottorappresentazioni di peso pari
sono quelle contenute in ker α (che è somma di rappresentazioni 1 dimensionali)
e la rappresentazione aggiunta di Sα . In particolare 2α non è una radice (non
ci sono sottorappresentazioni di M di peso 4). Perciò se α è radice 12 α non lo è.
Di conseguenza non ci sono rappresentazioni di peso dispari, cioè
M = h ⊕ gα ⊕ g−α .
Quindi gli unici multipli di α che stanno in Φ sono α e −α. Inoltre dalla
dimostrazione è chiaro che gα = Span(xα ) e perciò ha dimensione 1.
Prendiamo ora α, β ∈ Φ e consideriamo la α-stringa di radici per β, cioè
poniamo
M
N=
gβ+iα .
i∈Z
Questo è ancora un Sα -modulo. Inoltre se v ∈ gβ+iα è autovettore di autovalore
β(hα ) + 2i perchè
[hα v] = (β + iα)(hα )v = (β(hα ) + 2i)v .
Quindi β(hα ) = hβ, αi è un intero e inoltre la lunghezza della α-stringa per β è
esattamente la dimensione di N , cioè hβ, αi.
Consideriamo ora il sottospazio vettoriale EQ di h∨ generato su Q dagli
elementi di Φ. Questo ha dimensione n = dim g. Infatti sia α1 , . . . , αn una base
di h∨ contenuta in Φ. Allora voglio dire che
Φ⊆
n
M
Qαi .
i=1
Infatti sia β ∈ Φ. Sappiamo che esistono c1 , . . . , cn ∈ k tali che β = c1 α1 + · · · +
cn αn . Allora per ogni j = 1, . . . , n vale
hβ, αj i =
n
X
ci hαi , αj i .
i=1
Questo è un sistema di n equazioni in n incognite a coefficienti razionali che
possiede un unica soluzione2 . Perciò ha soluzione in Q, cioè ci ∈ Q.
2 Perchè
la forma (, ) è non degenere.
18
CAPITOLO 1. ALGEBRE DI LIE
Infine dimostriamo che (, ) ristretta a EQ è definita positiva. Infatti se β ∈ EQ
(β, β) = κ(tβ , tβ ) = tr(adg tβ adg tβ ) =
X
α(tβ )2 > 0
α∈Φ
dove l’ultima uguaglianza segue dalla scrittura di adg tβ nella base data dai gα .
Quindi ponendo E = EQ ⊗Q R abbiamo costruito una mappa
(g, h) 7→ (E, Φ)
che associa a ogni algebra di Lie (corredata di una sottoalgebra torale massimale)
una coppia data da uno spazio euclideo e di un sistema di radici in esso.
Infatti per ogni spazio euclideo E definiamo un suo sottoinsieme Φ ⊆ E r{0}
come un sistema di radici se valgono le seguenti proprietà:
1. Φ genera E come spazio vettoriale su R.
2. Se α ∈ Φ gli unici multipli di α in Φ sono ±α.
3. Per ogni α, β ∈ Φ i valori hβ, αi =
2(β,α)
(α,α)
sono interi.
4. Per ogni α ∈ Φ le simmetrie σα che mandano x in x − hx, αiα lasciano Φ
invariato.
1.6
Teoria assiomatica dei sistemi di radici
Supponiamo di avere un sistema di radici Φ ⊆ E. Osserviamo che per ogni
α, β ∈ Φ se θ è l’angolo tra α e β
hβ, αi =
2(β, α)
2||β||
=
cos θ .
(α, α)
||α||
Ma allora
hβ, αihα, βi = 4 cos2 θ
è un intero minore o uguale a 4. Questo lascia poche possibilità per θ. Supponiamo ||β|| ≥ ||α|| e che non siano proporzionali (nel qual caso β = ±α). Allora
le possibilità sono
hα, βi
0
1
-1
1
-1
1
-1
hβ, αi
0
1
-1
2
-2
3
-3
θ
π/2
π/3
2π/3
π/4
3π/4
π/6
5π/6
||β||/||α||
indeterminato
1
1
2
2
3
3
1.6. TEORIA ASSIOMATICA DEI SISTEMI DI RADICI
19
Lemma 9. Siano α, β ∈ Φ non proporzionali. Se (α, β) > 0 (rispettivamente
(α, β) < 0) allora α − β ∈ Φ (rispettivamente α + β ∈ Φ).
Dimostrazione. Senza perdita di generalità supponiamo ||β|| > ||α||. Facciamo
il caso (α, β) > 0. Allora dalla tabella sappiamo che hα, βi = 1. Ma allora
α − hα, βiβ = α − β ∈ Φ .
Definiamo il gruppo di Weil W di Φ come il sottogruppo di GL(E)
generato dalle riflessioni σα per α ∈ Φ.
Lemma 10. Se ξ ∈ GL(E) manda Φ in sè, allora per ogni radice α ξσα ξ −1 =
σξα
Una base di Φ è un sottoinsieme ∆ ⊆ Φ tale che
• ∆ è una base di E.
• Ogni elemento β di Φ si scrive come somma concorde di elementi di ∆,
cioè
!
X
β=±
εα α con εα ∈ {0, 1}
α∈∆
Vogliamo dimostrare che esistono basi, anzi in un certo senso vogliamo
“trovarle tutte”. Sia per ogni α ∈ E
pα = {x ∈ E | (x, α) = 0}
(l’iperpiano ortogonale ad α). Le camere di Weil sono le componenti connesse
di
[
Er
pα .
α∈Φ
Lemma 11. Esiste una corrispondenza biunivoca tra le camere di Weil e le basi
di Φ.
Dimostrazione. Se C è una camera di Weil e γ ∈ C definiamo le radici positive
come
Φ+ = {α ∈ Φ | (α, γ) > 0} .
Osserviamo che questo dipende solo da C e non da γ. Inoltre chiamiamo radici
negative quelle radici che non sono positive (Φ− ). Diciamo che una radice positiva α è indecomponibile se non è somma di altre radici positive. Definiamo
quindi
∆(C) = {α ∈ Φ+ | α indecomponibile } .
È chiaro che ogni radice è combinazione concorde di elementi di ∆(C) (se un
α ∈ Φ+ è decomponibile lo scrivo come α = β + β 0 e poi induco, tanto sono un
numero finito). Quindi in particolare generano. Ci manca da dimostrare solo
20
CAPITOLO 1. ALGEBRE DI LIE
che siano linearmente indipendenti. Osserviamo che per ogni α, β ∈ ∆(C) α − β
non è una radice, per cui (α, β) ≤ 0. Scriviamo ora una combinazione lineare
X
rα α = 0
α
Separando nei due lati le rα positive da quelle negative
X
X
rα α =
(−rβ )β .
rα >0
rβ <0
Chiamiamo ε il valore comune. Allora
X
(ε, ε) =
−rα rβ (α, β) ≤ 0
rα >0,rβ <0
Per cui dev’essere ε = 0. WLOG allora rα > 0 per ogni α. Ma, preso γ ∈ C
risulta
X
0=
rα (α, γ)
α
e poichè tutti gli addendi del membro di destra sono positivi dev’essere rα = 0
per ogni α.
Viceversa per ogni base possiamo determinare una camera. Infatti è sufficiente prendere un γ tale che (γ, α) > 0 per ogni α ∈ ∆ e associare a ∆ la
camera in cui sta γ.
Lemma 12. Sia α ∈ ∆. Allora se β ∈ Φ+ , con β 6= α, allora σα β ∈ Φ+ .
Dimostrazione. Infatti scriviamo
β=
X
kγ γ .
γ∈∆
Poichè β non è proporzionale ad α esiste γ 6= α con kγ > 0. Ma in σα (β) =
β − hβ, αi cambia solo la coordinata di α, per cui σα (β), che ha un coefficiente
positivo, dev’essere una radice positiva.
Teorema 10. Sia Φ ⊆ E un sistema di radici e ∆ una sua base e sia W il
gruppo di Weil di Φ. Allora
1. Se γ sta in una camera esiste σ ∈ W tale che σγ ∈ C(∆) (cioè il gruppo
di Weil è transitivo sulle camere).
2. Se ∆0 è un’altra base di Φ esiste σ ∈ W tale che σ(∆0 ) = ∆ (cioè W è
transitivo sulle basi).
3. Se α ∈ Φ esiste σ ∈ W tale che σ(α) ∈ ∆.
4. W è generato dai σα per α ∈ ∆.
1.6. TEORIA ASSIOMATICA DEI SISTEMI DI RADICI
21
Dimostrazione. Dimostreremo prima i primi tre risultati per il sottogruppo
W 0 = hσα | α ∈ ∆i
e poi dimostreremo che W 0 = W . Fissiamo γ ∈ C(∆).
(1). Consideriamo
1 X
α
δ=
2
+
α∈Φ
0
Sia σ ∈ W tale che (σ(γ), δ) sia massimo. Vogliamo dire che (σγ, α) > 0 per
ogni α ∈ ∆ (e quindi in Φ+ ).
Infatti sappiamo che
(σα σγ, δ) ≤ (σγ, δ) .
Ma
X
1
σα (β) = (σγ, δ − α) = (σγ, δ) − (σγ, α)
(σα σγ, δ) = (σγ, σα δ) = σγ,
2
+
β∈Φ
dove la penultima uguaglianza è data dal fatto che σα α = −α, ma che σα
permuta le altre radici positive. Cioè (σγ, α) > 0 per ogni α ∈ Φ+ , che è quello
che volevamo dimostrare.
(2). È una ovvia conseguenza di (1) e della corrispondenza biunivoca tra
basi e camere di Weil.
(3). Per (2) è sufficiente far vedere che α appartiene ad almeno una base.
Prendiamo γ ∈ pα tale che γ 6∈ pβ per nessun’altra radice β 6= ±α. Possiamo
quindi trovare γ 0 tale che (γ 0 , α) = ε > 0, ma |(γ 0 , β)| > ε per ogni altra radice
β 6= ±α. Ma allora α è indecomponibile tra le radici positive rispetto a γ 0 .
Infatti se
α = β1 + · · · + βk ⇒ (γ 0 , α) = (γ 0 , β1 ) + · · · + (γ 0 , βk ) > ε
assurdo.
(4). Basta far vedere che σα ∈ W 0 per α ∈ Φ. Possiamo trovare ξ ∈ W 0 che
manda ξ(α) ∈ ∆. Ma allora
ξσα ξ −1 = σξα ∈ W 0
e perciò σα ∈ W 0 .
Un sistema di radici si dice irriducibile se non è scrivibile come unione
disgiunta di due sistemi di radici ortogonali.
Data una base ∆ = {α1 , . . . , αn }, la matrice di Cartan di Φ è la matrice
(hαi , αj i)ij . Osserviamo che, poichè due qualsiasi basi sono coniugate, la matrici
di Cartan non dipende dalla scelta della base (a meno di riordino).
Un modo comodo di codificare l’informazione della matrice di Cartan sono
i diagrammi di Dynkin. Il grafo di Coxeter di ∆ è il grafo che ha per vertici
gli elementi di ∆ e ha esattamente hαi , αj ihαj , αi i archi tra i vertici αi e αj . Il
22
CAPITOLO 1. ALGEBRE DI LIE
diagramma di Dynkin è il grafo di Coxeter con l’informazione aggiuntiva che
i lati multipli (che accadono solo quando αi e αj hanno moduli diversi) sono
ortientati verso la radice di modulo massimo.
È chiaro che il sistema di radici è irriducibile se e solo se il suo diagramma
di Dynkin è connesso. Inoltre la matrice di Cartan (e perciò il diagramma di
Dynkin) determina completamente il sistema di radici.
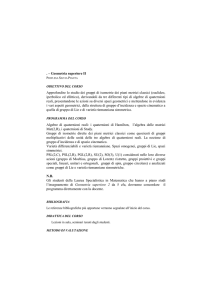
Teorema 11 (Teorema di Classificazione). Sia Φ un sistema di radici irriducibile di rango l. Allora il suo diagramma di Dynkin è uno dei seguenti:
Al (l ≥ 1) :
Bl (l ≥ 2) :
Cl (l ≥ 3) :
1
1
1
2
2
2
3
3
3
l−1
l−1
l−1
2
l
E6 :
1
3
4
l
F4 :
1.7
1
2
3
l−2
1
2
3
4
6
5
6
7
5
6
7
2
E7 :
l
1
3
4
l−1
Dl (l ≥ 3) :
5
2
E8 :
l
G2 :
1
3
1
2
4
MANCANTE: teoremi di coniugio, isomorfismo e esistenza
Questa sezione conterrà gli enunciati di tre teoremi molto importanti che n non
sono stati fatti a lezione.
Teorema 12 (di isomorfismo). Siano g, g0 algebre di Lie semisemplici e siano
h, h0 sottoalgebre torali massimali di sistemi di radici Φ, Φ0 rispettivamente. Supponiamo che esista un isomorfismo ξ di Φ con Φ0 che induce quindi un isomorfismo di algebre di Lie tra h e h0 . Inoltre fissiamo ∆ base di Φ e per ogni α ∈ ∆
scegliamo un isomorfismo ξα : gα → gξα . Allora esiste un unico ξ : g → g0
isomorfismo che estende gli isomorfismi di h e di gα .
Quindi algebre di Lie con sistemi di radici isomorfi sono isomorfe.
Teorema 13 (di coniugio). Sia g algebra di Lie semisemplice e siano h, h0
sottoalgebre torali massimali di g. Allora esiste un automorfismo ϕ : g → g tale
che ϕ(h) = h0 .
Quindi tutte le sottoalgebre torali massimali di un’algebra di Lie semisemplice hanno sistemi di radici isomorfi.
8
1.8. TEORIA DELLE RAPPRESENTAZIONI
23
Teorema 14 (di esistenza di Serre). Sia Φ un sistema di radici e sia ∆ =
{α1 , . . . , αl } una sua base. Sia g l’algebra di Lie generata dagli elementi
{xi , hi , yi | i = 1, . . . , l}
soggetti alle relazioni
• [hi hj ] per ogni i, j.
• [xi yi ] = hi e [xi yj ] = 0 per i 6= j.
• [hi xj ] = hαi , αj ixj e [hi yj ] = −hαj , αi iyj per ogni i, j.
• (ad xi )−hαj ,αi i+1 xj = 0 e (ad yi )−hαj ,αi i+1 yj = 0 per ogni i 6= j
Allora g è un’algebra di Lie semisemplice finita, la sottoalgebra generata dagli
hi è un’algebra torale massimale e il sistema di radici è naturalmente isomorfo
a Φ.
Quindi per ogni sistema di radici esiste un’algebra di Lie semisemplice.
1.8
Teoria delle rappresentazioni
Sia V un g-modulo (non necessariamente finito). Scegliamo inoltre un’algebra
torale massimale h e una base ∆ del sistema di radici. Sia λ ∈ h∨ . Definiamo
lo spazio-peso di λ come
Vλ = {v ∈ V | hv = λ(h)v ∀h ∈ h} .
Quegli elementi λ ∈ h∨ per cui Vλ 6= 0 sono detti pesi di V .
Un vettore massimale v ∈ V (di peso λ) è un vettore non nullo in Vλ =
{w ∈ V | hw = λ(h)w} tale che per ogni α ∈ ∆ gα v = 0. Se V è finito esistono
sempre vettori massimali. Infatti sia
M
B(∆) = h ⊕
gα
α0
una sottoalgebra di Borel. Questa è risolubile e perciò ha un autovettore comune
per il teorema di Lie, che è un vettore massimale.
Un g-modulo V si dice standard ciclico se esiste un vettore massimale v
di peso λ tale che
V = U(g)v .
Proposizione 7. Sia V = U(g)v standard ciclico e sia Φ+ = {β1 , . . . , βn }
l’insieme delle radici positive. Allora
(a) V è generato dai vettori yβi11 · · · yβinn v. In particolare V è somma diretta dei
suoi spazi peso.
24
CAPITOLO 1. ALGEBRE DI LIE
(b) I pesi di V sono della forma
µ=λ−
X
kα α
α∈∆
dove i kα ∈ N.
(c) Per ogni peso µ dim Vµ < ∞ e in particolare dim Vλ = 1.
(d) Ogni sottomodulo di V è somma diretta dei suoi spazi peso.
(e) V è indecomponibile e ha un unico sottomodulo massimale.
Dimostrazione. (a) è una
L conseguenza immediata del teorema di Poincarè-BirkoffWitt. Infatti sia g− = α∈Φ− gα . Allora
V = U(g)v = U(g− )U(B(∆)v = U(g− )v .
(b) segue da (a). Infatti tutti i vettori della forma yβi11 · · · yβinn v stanno nello
spazio peso corrispondente a
n
X
λ−
ij βj
j=1
(si tratta di un banale conto) per cui, sostituendo le espressioni dei βj in termini
degli elementi della base abbiamo la tesi.
(c) segue ancora da (a). Infatti per ogni peso µ
Vµ = Span(yβi11 · · · yβinn v | µ = λ −
n
X
ij βj }
i=j
e lo spazio vettoriale sulla destra è chiaramente di dimensione finita (e di
dimensione 1 quando µ = λ).
P
(d) Prendiamo W sottomodulo di V . Sappiamo che w = µ vµ con vµ ∈ Vµ
(perchè V è somma dei suoi spazi peso), dobbiamo dimostrare che vµ ∈ W . Se
cosı̀ non fosse prendiamo w controesempio con il minor numero di addendi non
nulli
w = v1 + · · · + vr vi ∈ Vµi .
È chiaro che r > 1 (se no non sarebbe un controesempio). Senza perdita di
generalità supponiamo v2 6∈ W . Poichè µ1 6= µ2 , esiste h ∈ h tale che µ1 (h) 6=
µ2 (h). Allora
µ1 (h)w − hw = (µ1 (h) − µ2 (h))v1 + · · · + (µ1 (h) − µr (h))vr ∈ W
è un controesempio più piccolo, assurdo.
(e) Basta prendere
M
W =
Vµ .
µ6=λ
Questo è chiaramente un sottomodulo. Inoltre contiene tutti i sottomoduli propri per cui è l’unico sottomodulo massimale (e perciò non ha un complementare,
quindi V è indecomponibile).
1.8. TEORIA DELLE RAPPRESENTAZIONI
25
Osserviamo che se V è un modulo standard ciclico, il peso del vettore massimale è caratterizzato dall’essere massimale tra tutti i pesi di W (cioè se µ è
un peso di V λ − µ è un peso positivo). Quindi il peso massimale di un modulo
standard ciclico è ben definito. Inoltre anche il vettore massimale è ben definito
a meno di proporzionalità, infatti dim Vλ = 1.
Teorema 15 (Esistenza e unicità). Per ogni λ ∈ h∨ esiste esattamente un unico
modulo V (λ) standard ciclico irriducibile di peso λ, eventualmente non finito.
Dimostrazione. Cominciamo con l’unicità. Siano V, W due moduli standard
ciclici irriducibili di peso λ e siano v, w vettori massimali. Consideriamo il
g-modulo V ⊕ W . È chiaro che (v, w) è un vettore massimale di peso λ.
Prendiamo ora T = U(g)(v, w). Questo è un modulo standard ciclico. Consideriamo le proiezioni pV , pW sui due fattori. Poichè V, W sono irriducibili
pV (T ) = V e pW (T ) = W . Quindi ker pV e ker pW sono due sottomoduli massimali di T . Ma T , essendo standard ciclico, ha un solo sottomodulo massimale,
per cui ker pV = ker pW . Cioè
V ∼
= T / ker pV = T / ker pW ∼
=W.
Veniamo all’esistenza. Ricordiamo la notazione dell’algebra di Borel
M
B(∆) = h ⊕
gα .
α∈Φ+
Prendiamo ora Dλ = kv e diamogli una struttura di B(∆)-modulo in questo
modo
gα v = 0 ∀α ∈ Φ+ e hv = λ(h)v ∀h ∈ h .
Quindi Dλ ha una naturale struttura di U(B(∆))-modulo. Definiamo ora
Z(λ) = U(g) ⊗U(B(∆)) Dλ
dove il prodotto tensore è fatto dando a U(g) la naturale struttura di U(B(∆))
modulo destro. Questo ha una naturale struttura di U(g)-modulo, anzi è standard ciclico perchè
Z(λ) = U(g)(1 ⊗ v)
e si vede immediatamente che gα v = 0 per ogni α ∈ Φ+ . Quindi Z(λ) ha un
unico sottomodulo massimale W . Bene, definiamo V (λ) = Z(λ)/W , questo è
un g-modulo standard ciclico irriducibile.
Lemma 13. In U(g) valgono le relazioni per α, β ∈ ∆, k > 0
• [xα yβk ] = 0 se α 6= β.
• [hα yβk ] = −kβ(hα )yβk .
• [xα yαk ] = −kyαk (k − 1 − hα ).
26
CAPITOLO 1. ALGEBRE DI LIE
Dimostrazione. Sono tutte una facile induzione, partendo dal fatto che α − β 6∈
Φ.
Sia ∆ = {α1 , . . . , αn } una base di Φ. Un peso λ ∈ h∨ è detto dominante
intero se si può scrivere nella forma
λ=
n
X
mi ∈ N
m i ωi
i=1
dove (ω1 , . . . , ωn ) è la base duale di
n
2αi
(αi ,αi )
o
i
, di modo che hωi , αj i = δij .
Teorema 16. V (λ) è finito dimensionale se e solo se λ è dominante intero.
Inoltre i pesi di V (λ) sono permutati dal gruppo di Weil.
Dimostrazione. Assumiamo che V (λ) sia finito. Per ogni α ∈ ∆ sia Sα =
Span(xα , yα , hα ) una copia di sl2 (k). Allora v è un autovettore di hα di peso
λ(hα ). Ma gli autovettori di h in una rappresentazione di sl2 (k) sono sempre
interi positivi o nulli. Per cui λ(hα ) ∈ N. Da questo segue la tesi, perchè
λ=
n
X
i=1
hαi , λiωi =
n
X
λ(hαi )ωi .
i=1
Viceversa supponiamo che λ sia dominante intero. Poniamo mi = λ(hi ) ∈ N e
(xi , hi , yi ) = (xαi , hαi , yαi )Fissiamo un vettore massimale v. La dimostrazione
si svolgerà in vari passi. Indichiamo la rappresentazione con φ : g → gl(V ).
• Per cominciare guardiamo il vettore w = yimi +1 v. Se j 6= i combinando la
prima parte del lemma 13 con il fatto che xj v = 0 abbiamo che xj w = 0.
D’altro canto, sempre per il lemma 13
xi w = y mi +1 xi v − kyimi +1 (mi − hi )v = −kyimi +1 (mi − mi )v = 0 .
Quindi w è P
un vettore massimale. Ma questo è impossibile perchè il suo
peso è λ − i (mi + 1)αi (sempre con un conto del lemma 13, per cui
w = 0.
• Indichiamo con Si = hi ⊕ gαi ⊕ g−αi la copia di sl2 (k) in g associata al
peso αi . Ora V contiene un Si -modulo finito dimensionale, precisamente lo
span dei vettori v, yi v, . . . , yimi v. Infatti per il punto precedente è stabile
per yi e per il lemma 13 è stabile per xi e hi . Definiamo ora V 0 come
la somma di tutti gli Si -sottomoduli finiti di V . Sappiamo che V 0 6= 0.
Inoltre xα V 0 ⊆ V 0 per ogni α ∈ Φ. Infatti se W è un Si -sottomodulo, lo è
anche xα W . Quindi V 0 è un g-sottomodulo di V , ma V è irriducibile per
cui V 0 = V .
• Vediamo ora che φ(xi ), φ(yi ) sono endomorfismi localmente nilpotenti di
V 3 . Infatti ogni w ∈ V sta in un Si -sottomodulo finito dimensionale, e lı̀
φ(xi ) e φ(yi ) sono nilpotenti.
3 Ricordiamo che un endomorfismo l di uno spazio vettoriale V è localmente nilpotente
se per ogni w ∈ V , esiste n ∈ N tale che ln w = 0.
1.8. TEORIA DELLE RAPPRESENTAZIONI
27
• Possiamo quindi definire
si = exp φ(xi ) exp φ(−yi ) exp φ(xi ) .
Infatti l’esponenziale di un endomorfismo localmente nilpotente l è sempre
ben definito perchè per ogni vettore w ∈ V la serie
(exp l)w =
∞
X
1 j
l w
j!
j=0
ha solo un numero finito di termini non nulli (ed è ovviamente lineare).
Inoltre si (Vµ ) = Vσi µ dove µ è un peso e σi = σαi è una riflessione.
Lemma 14. Per ogni x ∈ gl(V ) localmente nilpotente vale l’equazione
(exp x)y(exp x)−1 = (exp ad x)y ∀y ∈ gl(V ) .
Dimostrazione. Infatti ad x = lx +r−x dove lx y = xy, r−x y = −yx. Questi
sono due endomorfismi commutanti di gl(V ), per cui
exp ad x = exp(lx + r−x ) = (exp lx )(exp r−x ) = lexp x rexp −x .
Perciò, svolgendo un po’ di conti
si φ(hi )s−1
= φ((exp ad xi )(exp ad −yi )(exp ad xi )hi ) = φ(−hi ) .
i
si φ(hj )s−1
= φ((exp ad xi )(exp ad −yi )(exp ad xi )hj ) = φ(hj − 2hi ) .
i
e quindi se w ∈ Vµ risulta
hi si w = si (s−1
i hi si )w = si (−hi w) = −µ(hi )si w = (σi µ)(hi )(si w)
hi si w = si (s−1
i hi si )w = si (−hi w) = −µ(hj − 2hi )si w = (σi µ)(hj )(si w) .
• Quindi l’insieme dei pesi è stabile per l’azione del gruppo di Weil4 e
dim Vµ = dim Vσµ se σ ∈ W .
Facciamo ora vedere che i pesi sono in numero finito. Per cominciare
osserviamo che i pesi dominanti sono in numero finito. Infatti se µ è un
peso dominante di V allora ovviamente anche µ + λ è ancora dominante
(anche se potrebbe non essere più un peso di V ). Ma λ − µ è somma di
radici positive, per cui
(λ + µ, λ − µ) ≥ 0 ⇒ ||µ|| ≤ ||λ|| .
Quindi i pesi dominanti sono in numero finito. D’altro canto un peso è
dominante se e solo se sta nella camera di Weyl associata alla base ∆
4 ricordiamo
che il gruppo di Weil è generato dalle σi
28
CAPITOLO 1. ALGEBRE DI LIE
scelta. Ma il gruppo di Weyl agisce transitivamente sulle camere, per cui
ogni peso è coniugato ad un peso dominante. Poichè il gruppo di Weyl è
finito, anche l’insieme dei pesi lo è. Ma allora
M
V =
Vµ
µ∈Π(V )
è finito.
Capitolo 2
Gruppi di Lie
Un gruppo di Lie G è una varietà differenziabile che ha una struttura di gruppo
tale che le mappe µ : G × G → G di moltiplicazione e le mappe ι : G → G di
inversione siano lisce. Indichiamo per ogni g ∈ G con Lg : G → G la mappa di
moltiplicazione a sinistra per g.
2.1
Gruppi e sottogruppi di Lie
Un campo di vettori X su G è detto invariante a sinistra se per ogni h ∈ G
d(Lg )h Xh = Xgh .
Un sottogruppo ad un parametro ϑ di G è un omomorfismo di gruppi di
Lie ϑ : R → G.
Teorema 17. Sia G un gruppo di Lie. La mappa ϑ 7→ ϑ0 (0) è una corrispondenza biunivoca tra l’insieme di tutti i sottogruppi ad un parametro e lo spazio
tangente a G in e Ge .
Dimostrazione. Siano ϑ, ϕ due sottogruppi ad un parametro tali che ϑ0 (0) =
ϕ0 (0). Derivando in s la relazione
ϑ(t + s) = ϑ(t)ϑ(s) = Lϑ(t) ϑ(s)
e valutandola in s = 0 otteniamo
ϑ0 (t) = d(Lϑ (t))e ϑ0 (0) .
e l’unicità segue dal teorema di esistenza e unicità per le equazioni differenziali
ordinarie.
Per quanto riguarda l’esistenza prendiamo v ∈ Ge ed estendiamolo a un
campo di vettori invariante a sinistra ponendo vx = d(Lx )e v. Consideriamo
l’equazione
ϑ0 (t) = v(ϑ(t) .
29
30
CAPITOLO 2. GRUPPI DI LIE
Possiamo trovare ε > 0 tale che esista un’unica soluzione ϑ : (−ε, ε) → G tale
che ϑ(0) = e. Osserviamo che per |t|, |s| < ε/2 vale
ϑ(t + s) = ϑ(t)ϑ(s) .
Infatti entrambe le espressioni valgono ϑ(t) se s = 0 e soddisfano la stessa
equazione differenziale.
Definiamo ora
N
t
ψ(t) = ϑ
N
dove |t| < N ε. Questa definizione non dipende dalla scelta di N , infatti se N, M
soddisfano entrambi l’ipotesi
M N M
N t
t
t
= ϑ
= ϑ
ϑ
N
MN
M
Questa ψ è un sottogruppo ad un parametro che coincide con ϑ in un intorno
di 0, per cui ci da l’esistenza.
Definiamo la mappa esponenziale ϑ : Ge → G data da
exp(v) = ϑv (1)
dove ϑv è l’unico sottogruppo a un parametro tale che ϑ0v (0) = v. La mappa
esponenziale è liscia per il teorema di regolarità delle soluzioni di un’equazione
differenziale ordinaria:
Teorema 18. Sia Ω aperto di Rn , I ⊆ R intervallo contenente lo 0. Sia inoltre
v : I × Ω → Rn funzione C ∞ . Allora per ogni y0 ∈ Ω esiste un ε > 0, un V
intorno di y0 e una funzione f : (−ε, ε) × V → Ω tale che
(
f (0, y)
= y ∀y ∈ V
∂ f
=
v(t, f (t, y)) ∀(t, y) ∈ (−ε, ε) × V
∂t
(t,y)
Teorema 19. Dato φ : G → H omomorfismo di gruppi di Lie. Allora il
seguente diagramma commuta:
Ge
dφe
exp
He
exp
φ
G
H
Dimostrazione. Osserviamo che se v ∈ Ge abbiamo che ϑdφe (v) = φϑv (sono
entrambi sottogruppi a un parametro con lo stesso vettore tangente). Quindi
valuntando in 1:
exp(dφe (v)) = φ exp(v)
che è la tesi.
2.1. GRUPPI E SOTTOGRUPPI DI LIE
31
Teorema 20. La mappa esponenziale è un diffeomorfismo da un intorno di 0
a un intorno di e.
Dimostrazione. Per il teorema della funzione inversa basta mostrare che d(exp)e
è invertibile. Ma se prendiamo v ∈ (Ge )0 = Ge
d
d
=
= v.
d(exp)e v =
exp(tv)
ϑv (t)
dt
dt
t=0
t=0
per cui d(exp)e = id.
Ricordiamo il noto fatto che la componente connessa dell’identità di un
gruppo topologico G è un sottogruppo normale chiuso.
Proposizione 8. Sia G un gruppo topologico e G1 la componente connessa
dell’identità. Sia inoltre S ⊆ G1 un intorno dell’identità. Allora hSi = G1 .
Dimostrazione. Infatti hSi è aperto perchè per ogni x ∈ S, xS ⊆ hSi. D’altro
canto è chiuso, perchè se y 6∈ S, yS ∩ hSi = ∅.
Teorema 21. Sia G un gruppo di Lie connesso, H un altro gruppo di Lie. Allora ogni omomorfismo di gruppi di Lie ϑ : G → H è completamente determinato
da d(ϑ)e : Ge → He .
Dimostrazione. Prendiamo U 0 ⊆ Ge , U ⊆ G intorni di 0 e di e tali che exp :
U 0 → U sia diffeomorfismo. Analogamente per V 0 ⊆ He , V ⊆ H. A meno di
restringere U, U 0 possiamo supporre ϑ(U ) ⊆ V . Allora
ϑ|U = exp |V 0 ◦ dϑe |U 0 ◦ (expU 0 )−1 .
Quindi almeno il comportamento locale di ϑ è determinato da dϑe . D’altro
canto se ϑ, ϑ0 sono due omomorfismi con lo stesso differenziale l’insieme
{x ∈ G | ϑ(x) = ϑ0 (x)}
è un sottogruppo che contiene un intorno dell’identità. Per il lemma contiene
tutto G perchè è connesso.
Lemma 15. Sia G un gruppo di Lie e ϕ : U → G una carta in un intorno
dell’identità tale che ϕ(0) = e. Allora
µ(ϕ(x), ϕ(y)) = ϕ(x + y + o(|x| + |y|))
dove x, y ∈ U tali che il loro prodotto stia nell’immagine di ϕ e dove | · | è una
qualunque norma su U .
Dimostrazione. La mappa di moltiplicazione µ : G × G → G è C ∞ , per cui in
coordinate si può srivere come
µ(x, y) = µ(0, 0) + ax + by + o(|x| + |y|) .
Ora µ(0, 0) = 0. Si tratta di far vedere che a = b = 0. Ma se x = 0, µ(0, y) = y
per ogni y ∈ U , per cui dev’essere b = 1. Analogamente per a = 1.
32
CAPITOLO 2. GRUPPI DI LIE
Teorema 22. Sia G un gruppo di Lie abeliano connesso. Allora esistono a, b ∈
N tali che
G∼
= T a × Rb
dove T = S 1 = R/Z.
Dimostrazione. Per cominciare dimostriamo che exp : Ge → G è un omomorfismo di gruppi. Infatti prendiamo v, w ∈ Ge . Allora per ogni N ∈
N
w N v
w N
v N exp
= exp
exp
exp v exp w = exp
N
N
N
N
perchè G è abeliano. Ma per il lemma precedente
N
v
w
1
exp v exp w = exp
+
+o
= exp(v + w + o(1)) .
N
N
N
Infine facendo tendere N a ∞
exp v exp w = exp(v + w) .
Quindi exp(Ge ) è un sottogruppo di G che contiene un intorno di e (perchè exp
è diffeomorfismo locale), quindi è tutto G. Perciò
G∼
= Ge / ker exp .
Ma il nucleo di exp è un sottogruppo discreto di Ge ∼
= Rn , perchè exp è un
diffeomorfismo locale. Perciò ker exp è un reticolo
ker exp =
a
M
Zvi
i=1
con v1 , . . . , va linearmente indipendenti su R. Ma questo ci da la tesi.
Sia G un gruppo di Lie. Un sottogruppo di Lie è un omomorfismo iniettivo
di gruppi di Lie f : H → G.
Lemma 16. Un sottogruppo di Lie f : H → G è un’immersione iniettiva.
Dimostrazione. Osserviamo che dfe è iniettivo perchè se dfe v = 0 risulta che
f (exp tv) = exp dfe tv = exp 0 = e per ogni t ∈ R. Ma se prendiamo U intorno
di 0 su cui exp è diffeo e t abbastanza piccolo per cui tv ∈ U , abbiamo che
f (exp(tv)) = e ma exp(tv) 6= 0. Infine poichè dfe dLg = dLf (g) dfg abbiamo che
f è un’immersione iniettiva.
Quindi ogni sottogruppo di Lie corrisponde a una sottovarietà immersa di
G. Non tutte i sottogruppi corrispondono a sottovarietà regolari. Ad esempio
se consideriamo il sottogruppo ϕ : Z → S 1 dato da ϕ(n) = ein .
Una sottovarietà ι : N → M di una varietà differenziabile è quasiregolare
se per ogni funzione f : K → N abbiamo che f è liscia se e solo se ιf lo è.
Si dimostra (ma qui non lo faremo) che ogni sottogruppo di Lie è una varietà
quasiregolare.
Ci chiediamo quand’è che un sottogruppo corrisponde a una varietà regolare.
2.1. GRUPPI E SOTTOGRUPPI DI LIE
33
Teorema 23. Un sottogruppo H < G corrisponde a una sottovarietà regolare
se e solo se è chiuso.
Dimostrazione. (⇒) Poichè H è una sottovarietà regolare è localmente chiuso.
Quindi c’è un’intorno U di e tale che H ∩ U è chiuso in U . Prendiamo y ∈ H̄ e
sia x ∈ H ∩ yU −1 (questo esiste perchè yU −1 è un intorno di e). Allora y ∈ xU
e x ∈ H, per cui
x−1 y ∈ H̄ ∩ U = H ∩ U .
Quindi y ∈ H, cioè H̄ = H.
(⇐) Per prima cosa individuiamo il sottospazio di Ge che corrisponde a
He . Prendiamo U 0 intorno di 0 in Ge e U intorno di e tale che exp sia un
diffeomorfismo tra U 0 e U . Possiamo quindi prendere l’inversa log : U → U 0 .
Poniamo
H 0 = log(H ∩ U ) .
Ora se 0 è un punto isolato di H 0 deve esistere un intorno V di e tale che
H∩V = {e}, cioè H è un sottogruppo discreto (e perciò una sottovarietà regolare
di dimensione 0). D’ora in poi supponiamo che 0 sia un punto di accumulazione
per H 0 . Fissiamo una metrica a caso in Ge .
Lemma 17. Sia {hn }n∈N successione di elementi di H 0 r {0} tale che hn → 0
e che
hn
→ x ∈ Ge .
|hn |
Allora exp(tx) ∈ H per ogni t ∈ R.
Dimostrazione. Infatti poichè |hn | → 0 possiamo trovare {mn } ⊆ Z tale che
mn |hn | → t. Allora
hn
exp(mn hn ) = exp mn |hn |
→ exp(tx) .
|hn |
D’altro canto exp(mn hn ) = (exp(hn ))mn ∈ H.
Possiamo quindi definire
hn
W = sx | ∃{hn } ⊆ H 0 r {0} tale che hn → 0
→ x, s ∈ R .
|hn |
Per il lemma exp W ⊆ H. Vogliamo dire che W è un sottospazio vettoriale (l’
intuizione è W = He ).
Prendiamo x, y ∈ W , vogliamo dimostrare che x + y ∈ W . Prendiamo
h(t) = log(exp(tx) exp(ty)) .
Questo è definito in un intorno di 0. Inoltre sappiamo che h(t)
→ x + y. Se
t
h(t) = 0 in un intorno di 0 abbiamo che x + y = 0, cioè y = −x. Beh ma in tal
caso x + y ∈ W di sicuro. Altrimenti
h(t)
h(t) |t|
x+y
=
→
|h(t)|
t |h(t)|
|x + y|
34
CAPITOLO 2. GRUPPI DI LIE
per t → 0+ . Per cui scegliendo opportunamente una successione tn abbiamo
x+y
∈ W , per cui x + y ∈ W .
che |x+y|
Consideriamo ora D = W ⊥ (supponendo la metrica in Ge inotta da un
prodotto scalare) e prendiamo la mappa
φ:D⊕W →G
(x, y) 7→ exp x exp y
Questo è un diffeomorfismo locale in (0, 0) (basta calcolarne il differenziale per
vedere che è x + y) e manda W in H. Infatti supponiamo che esistano xn , yn
con yn 6= 0 tali che
exp xn exp yn ∈ H, (xn , yn ) → 0 .
Allora a meno di sottosuccessioni possiamo supporre che |yynn | → y ∈ D. Ma
exp yn ∈ H per ogni n per cui yn ∈ H 0 definitivamente. Quindi y ∈ W , assurdo
perchè y ∈ D.
Quindi φ è una carta adattata per H in e. Ma allora coniugando con Lh per
h ∈ H otteniamo carte adattate per H in ogni h ∈ H.
2.2
Algebra di Lie di un gruppo di Lie
Facciamo ora vedere che Ge ha una naturale struttura di algebra di Lie. Ricordiamo che se M è una varietà differenziabile il bracket dà una struttura naturale
di algebra di Lie alla famiglia dei campi vettoriali su M . Vogliamo dire che i
campi vettoriali invarianti a sinistra sono una sottoalgebra di Lie. Ricordiamo
che un campo vettoriale è invariante a sinistra se per ogni g, h ∈ G
d(Lg )h Xg = Xgh .
Allora che sia una sottoalgebra di Lie segue dal fatto che
d(Lg )h [X, Y ]h = [d(Lg )h Xh , d(Lg )h Yh ] .
Ricordiamo che i campi vettoriali invarianti a sinistra sono isomorfi come spazio
vettoriale a Ge .
Teorema 24. Sia f : G → H omomorfismo di gruppi di Lie. Allora dfe : Ge →
He è un omomorfismo di algebre di Lie.
Dimostrazione. Per ogni g ∈ G vale
Lf (g) ◦ f = f ◦ Lg .
Per cui, differenziando
d(Lf (g) )f (h) dfh = dfh d(Lg )h
Sia X campo vettoriale invariante a sinistra e sia X̃ il campo vettoriale invariante
a sinistra definito da
X̃e = dfe Xe .
2.3. RIVESTIMENTI DI UN GRUPPO DI LIE
35
Allora
X̃h = d(Lh )e X̃e = d(Lh )e dfe Xe = dfh Xh
per cui X̃ è f -correlato a X e la tesi segue immediatamente.
Definiamo ora per ogni gruppo di Lie G la rappresentazione aggiunta in
questo modo. Facciamo agire G su Ge ponendo
gx = d(ιg )e x
dove ιg : G → G è il coniugio ιg h = ghg −1 .
Teorema 25 (Formula di Baker-Campbell-Hausdorff).
Sia G un gruppo di Lie,
P
x, y ∈ Ge . Esiste una serie di potenze n an sn tale che an ∈ Ge è un’espressione ottenuta facendo parentesi di Lie annidate a partire da x e y e che per t
abbastanza piccolo valga
!
X
exp(tx) exp(ty) = exp
an tn .
n
In particolare exp(tx) exp(ty) = exp t(x + y) +
[xy] 2
2 t
+ o(t2 ) .
Teorema 26. d(Ad)e = ad.
Dimostrazione. Beh, (d(Ad)e x)y =
d
dt (Ad(exp(tx))y) t=0 .
Ma d’altro canto
d
(ιexp(tx) exp(sy))
Ad(exp(tx))y = d(ιexp(tx) )e y =
ds
t=0
per cui
(d(Ad)e x)y =
d2
.
(exp(tx) exp(sy) exp(−tx))
dsdt
s=t=0
E, alla formula di Baker-Campbell-Hausdorff
exp(tx) exp(sy) exp(−tx) = exp(tx + sy + o(|t| + |s|)) exp(−tx) =
= exp(sy − ts[xy]/2 + o(|t|2 + |s|2 ))
da cui la tesi.
2.3
Rivestimenti di un gruppo di Lie
Enunciamo un importante teorema senza dimostrazione.
Teorema 27. Sia G gruppo di Lie di algebra di Lie g. Sia h sottoalgebra di
Lie. Allora esiste un unico sottogruppo di Lie H tale che la sua algebra di Lie
sia h.
36
CAPITOLO 2. GRUPPI DI LIE
p
Teorema 28. Sia G un gruppo di Lie e sia G̃ −
→ G il suo rivestimento universale. Prendiamo un qualsiasi punto ẽ ∈ G sopra e. Allora esiste un’unica
struttura di gruppo di Lie su G̃ tale che p sia un omomorfismo di gruppi di Lie
e ẽ sia l’identità di G̃.
Dimostrazione. Mettiamo su G̃ la struttura naturale di varietà C ∞ che rende
p un diffeomorfismo locale. Consideriamo le due mappe µ : G × G → G e
η : G → G di moltiplicazione e di inverso. Sappiamo che sono C ∞ . Allora
possiamo trovare µ̃ unico sollevamento di µ ◦ (p, p) : G̃ × G̃ → G tale che
µ̃(ẽ, ẽ) = ẽ. Analogamente possiamo trovare η̃ unico sollevamento di η ◦ p tale
che η̃(ẽ) = ẽ. Un rapido controllo con l’unicità del sollevamento dice che µ̃ e η̃
danno a G̃ l’unica struttura possibile di gruppo di Lie.
Proposizione 9. Sia Γ sottogruppo discreto di un gruppo topologico G. Allora
p : G → G/Γ è un rivestimento.
Dimostrazione. Osserviamo che, poichè p è G-equivariante e G/Γ è omogeneo,
ci basta trovare un intorno banalizzante di e.
Prendiamo U intorno di e tale che U ∩ Γ = {e}. Possiamo trovare allora
V intorno di e tale che V V −1 ⊆ U (questo perchè la mappa (x, y) 7→ xy −1 è
continua). Per ogni h1 , h2 ∈ Γ abbiamo che V h1 ∩ V h2 = ∅. Infatti se
v1 h1 = v2 h2 ⇒ v1 v2−1 = h2 h−1
1 ∈Γ
e, poichè V V −1 ∩ Γ = {e}, dev’essere h1 = h2 . Ma p|V h : V h → p(V ) è iniettiva
e aperta, aperta perchè proiezione al quoziente per un gruppo, iniettiva perchè
se
v1 h(v2 h)−1 ∈ H ⇒ v1 v2−1 ∈ H ⇒ v1 = v2
per cui è un omeomorfismo. Ma allora p(V ) è un intorno banalizzante di p(e).
Osserviamo che abbiamo essenzialmente dimostrato che Γ agisce su G in
modo libero e propriamente discontinuo.
Proposizione 10. Sia G gruppo topologico connesso e Γ < G sottogruppo
normale discreto. Allora Γ < Z(G).
Dimostrazione. Fissiamo γ ∈ Γ e facciamo vedere che sta nel centro. La mappa
G → Γ che manda
g 7→ gγg −1
è continua, per cui l’immagine è connessa. Ma contiene chiaramente γ e Γ è
discreto. Perciò gγg −1 = γ, cioè γ ∈ Z(G).
Teorema 29. Siano G, H gruppi di Lie connessi e sia f : G → H omomorfismo
di gruppi di Lie che sia un diffeomorfismo locale (è sufficiente in e). Allora f
è un rivestimento e Γ = ker f è un sottogruppo normale discreto del centro. In
particolare se G è semplicemente connesso allora Γ = π1 (H, e).
2.4. SLN (C)
37
Dimostrazione. Che ker f sia discreto segue dal fatto che f sia omeomorfismo
locale. Perciò Γ è centrale. Inoltre è surgettiva perchè nell’immagine ci sta
tutto un intorno di e in H. Quindi H ≡ G/Γ come gruppi di Lie e f : G → H
è rivestimento.
Quindi a ogni gruppo di Lie G possiamo associare un gruppo di Lie semplicemente connesso G̃ è un sottogruppo discreto del centro Γ tale che G̃/Γ.
Teorema 30. Siano G1 , G2 due gruppi di Lie e siano g1 , g2 le corrispondenti
algebre di Lie. Supponiamo inoltre di avere λ : g1 → g2 omomorfismo di algebre
di Lie. Allora esiste al più un π : G1 → G2 omomorfismo di gruppi di Lie tale
che dπe = λ. Inoltre, se G1 è semplicemente connesso, tale π esiste sempre.
Dimostrazione. Sia G = G1 ×G2 . È chiaro che la sua algebra di Lie è g = g1 ⊕g2 .
Allora consideriamo il grafico di λ
h = {(x, λx) ∈ g | x ∈ g1 } .
Si verifica subito che questa è una sottoalgebra di Lie. Prendiamo H < G il
sottogruppo di Lie corrispondente.
Supponiamo ora che esista π : G1 → G2 che induce λ e consideriamo σ :
G1 → G data da
σ(x) = (x, π(x)) .
Questa è tale che dσe (g1 ) = h. Perciò σ(G1 ) ⊆ H e ne contiene un intorno
dell’identità (perchè la mappa esponenziale è un diffeomorfismo locale). Quindi
σ(G1 ) = H, cioè π è definita da
π(x) = y ⇔ (x, y) ∈ H .
Perciò tale π se esiste è unico.
Mostriamo ora che se G1 è semplicemente connesso, allora H è il grafico di
qualcosa. Prendiamo γ : G → G1 la proiezione sul primo fattore. Consideriamo ora τ = d(γ|H )e . Questa non è altro che la proiezione sul primo fattore
h → g1 . Ma questo è un isomorfismo di algebre di Lie, per cui γ : H → G1 è un
diffeomorfismo locale. Ma allora è un rivestimento. Ma, poichè G1 è semplicemente connesso, è un isomorfismo. Quindi H è un grafico di un omomorfismo
π : G1 → G2 di gruppi di Lie (dato dalla composizione della proiezione H → G2
con l’isomorfismo G1 ≡ H). È un conto immediato vedere che π induce λ.
Quindi in particolare studiare le rappresentazioni di un gruppo di Lie semplicemente connesso è la stessa cosa che studiare le rappresentazioni della sua
algebra di Lie.
2.4
SLn (C)
Proposizione 11. Il centro di SLn (C) è costituito dalle matrici scalari che
corrispondono alle radici n-esime dell’unità.
38
CAPITOLO 2. GRUPPI DI LIE
Dimostrazione. Consideriamo la rappresentazione naturale di SLn (C) che agisce
su Cn . Questa è chiaramente fedele e irriducibile. Allora, se prendiamo γ nel
centro di SLn (C), questo agisce come un endomorfismo di rappresentazioni. Ma,
per il lemma di Schur, è o nullo o un isomorfismo. Prendiamo quindi λ autovalore
di γ. Allora γ − λ è un endomorfismo di rappresentazioni non iniettivo, per cui
è nullo, cioè γ è una matrice scalare. D’altronde det γ = λn = 1, da cui la
tesi.
Indicheremo con µn il gruppo delle radici n-esime dell’unità.
Osserviamo che Z(SLn (C)) ⊆ exp h dove h è la sottoalgebra torale massimale
di sln (C) fatta dalle matrici diagonali. Infatti se
2π
n
A=0
0
0
0
..
.
···
0
0
···
···
2π
n
0
0
2π
⇒ exp(A) = e n
0
− 2(n−1)π
n
e analogamente per gli altri elementi del centro.
Questo non è un caso, infatti per ogni gruppo semisemplice G se h è un’algebra torale massimale di g abbiamo che Z(G) ⊆ exp h.
Poichè dimostreremo in seguito che SLn (C) è semplicemente connesso le sue
rappresentazioni coincideranno con le già classificate rappresentazioni di sln (C).
La domanda adesso è quand’è che una rappresentazione passa al quoziente a
SLn (C)/Γ per un sottogruppo centrale Γ?
Ricordiamo che le rappresentazioni irriducibili di sln (C) sono classificate
da (n − 1)-uple λ = (m1 , . . . , mn−1 ) di numeri naturali (più precisamente da
elementi dominanti interi del duale dell’algebra torale massimale).
Proposizione 12. Vλ è una rappresentazione di SLn (C)/Γ se e solo se λx ∈
2πiZ per ogni x tale che exp x ∈ Γ.
Dimostrazione. Ora Vλ è rappresentazione di SLn (C)/Γ se e solo se γv = v per
ogni γ ∈ Γ, dove v è il vettore massimale.
Supponiamo che sia una rappresentazione e prendiamo exp x ∈ Γ. Allora
(exp x)v = v ma (exp x)v = eλ(x) v ⇒ eλ(x) = 1
e cioè λ(x) ∈ 2πiZ. Il viceversa è ovvio.
Poichè Γ è un sottogruppo centrale dev’essere µm per qualche m che divide
n. Quindi, come abbiamo visto, l’elemento generico di µm è della forma exp x
dove
1 ···
0
2πi . .
..
..
x=
..
.
m
0 ··· 1 − n
2.5. ALGEBRE DI CLIFFORD E GRUPPI SPIN
In questo caso λ(x) =
2πi
m (λ1
39
+ · · · + λn−1 ) dove
λk =
k
X
mj
j=1
infatti
λ(Ejj − E(j+1)(j+1) ) = λj .
Quindi il più grande m per cui Vλ è una rappresentazione di SLn (C)/µm è
M CD(n, λ1 + · · · + λn−1 ) .
Proposizione 13. SLn (C) è semplicemente connesso per ogni n ≥ 1.
Dimostrazione. Facciamo agire SLn (C) su Cn r{0}. Il vettore v = 1
ha per stabilizzatore il sottogruppo H delle matrici della forma
1 v
h=
0 B
0
···
con B ∈ SLn−1 (C) e v ∈ Cn . Questo è isomorfo a SLn−1 (C) o Cn . La mappa
SLn (C) → Cn r {0} data da
A 7→ Av
genera un fibrato di fibra H. Perciò per la successione esatta lunga di gruppi
d’omotopia
π1 (H) → π1 (SLn (C) → π1 (Cn r {0})
Ora ricordiamo che H è omotopicamente equivalente a SLn−1 (C) e che Cn r{0}
è omotopicamente equivalente a S 2n−1 .
Dimostriamo che π1 (SLn (C)) = 1 per induzione su n. Se n = 1 SL1 (C) =
{±1}, per cui è sicuramente semplicemente connesso. Se n > 1 abbiamo che
S 2n−1 è semplicemente connesso. Per ciò la successione esatta diventa
1 → π1 (SLn (C)) → 1
e quindi SLn (C) è semplicemente connesso.
2.5
Algebre di Clifford e gruppi spin
Sia V uno spazio vettoriale equipaggiato di una forma quadratica Q.1 Definiamo
l’algebra di Clifford relativa a Q (C(Q)) come il quoziente dell’algebra tensoriale T V per l’ideale bilatero generato dagli elementi della forma v ⊗ v − Q(v, v).
Questa soddisfa l’ovvia proprietà universale:
1 Qui assumeremo che il campo base sia C, anche se molto di quello detto vale per un campo
di caratteristica generica.
T
0
40
CAPITOLO 2. GRUPPI DI LIE
Teorema 31. Se A è un’algebra associativa e l : V → A è un’applicazione
lineare tale che per ogni v ∈ V l(v)l(v) = Q(v, v), allora esiste un unico omomorfismo di algebre associative ˜l : C(Q) → A tale che ˜lι = l, dove ι : V → C(Q)
è l’ovvia inclusione.
Osserviamo che, poichè tutte le relazioni per cui quozientiamo sono pari (cioè
contengono solo elementi di grado pari in T V ) allora C(Q) ha una struttura
naturale di algebra Z/2 graduata.
C(Q) = C(Q)pari ⊕ C(Q)dispari .
Questa struttura può essere anche interpretata come la decomposizione in autospazi dell’involuzione α : C(Q) → C(Q) definita sugli elementi di V da
α(v) = −v.
Supponiamo ora che Q sia non degenere e prendiamo una decomposizione
V = W ⊕ W0
dove W, W 0 sono sottospazi isotropi. Vogliamo dimostrare che c’è un isomorfismo naturale di algebre associative
C(Q) ∼
= End(Λ◦ W ) .
Per dare l’isomorfismo è sufficiente dare una mappa V → End(Λ◦ W ) che rispetti
le relazioni dell’algebra di Clifford. Più precisamente daremo due mappe, una
che parte da W e una che parte da W 0 . La prima è di facile descrizione
l : W → End(Λ◦ W )
l(w)z = w ∧ z .
Per quanto riguarda la seconda, definiamo per ogni θ ∈ W ∨ una derivazione di
Λ◦ W come
Dθ (1) = 0, Dθ (w) = θ(w), Dθ (ζ ∧ ξ) = Dθ (ζ) ∧ ξ + (−1)deg ζ ζ ∧ Dθ (ξ) .
O, più esplicitamente
Dθ (w1 ∧ · · · ∧ wr ) =
r
X
(−1)i−1 θ(wi )w1 ∧ · · · ∧ w
ci ∧ · · · ∧ wr .
i=1
Allora possiamo porre, per ogni w0 ∈ W 0
l0 (w0 )z = Dθ (w0 ) dove θ(w) = 2Q(w0 , w) .
A questo punto definiamo j(w + w0 ) = l(w) + l(w0 ) e sono solo un po’ di conti
dimostrare che j passa a un isomorfismo.
Vogliamo usare questa descrizione di C(Q) per descrivere più in dettaglio
C(Q)pari . Infatti C(Q)pari è fatto dagli automorfismi di Λ◦ V che lasciano
invariato
M
Λ2k V .
k≥0
2.5. ALGEBRE DI CLIFFORD E GRUPPI SPIN
41
Se consideriamo l’antiautomorfismo definito da
τ (x1 · · · xr ) = xr · · · x1 .
possiamo definire −∗ : C(Q) → C(Q) dato da x∗ = ατ x.
Definiamo il gruppo Spin come
Spin(Q) = {x ∈ C(Q)pari | xx∗ = 1, xV x∗ ⊆ V } .
Questo è un gruppo di Lie perchè è un sottogruppo chiuso di C(Q)× = GL(Λ◦ W ).
Teorema 32. Sia dim V ≥ 2. Poniamo ρ : Spin(Q) → GL(V ) dato da
ρ(x)v = xvx∗ .
Allora ρ(Spin(Q)) = SO(Q) ed è un rivestimento doppio connesso.
Dimostrazione. Per cominciare osserviamo che
Q(ρ(x)v, ρ(x)v) = Q(xvx∗ , xvx∗ ) = xvx∗ xvx∗ = xvvx∗ = xQ(v, v)x∗ = Q(v, v)
cioè che ρ(Spin(Q)) ⊆ O(Q).
Per mostrare che l’immagine è SO(Q) consideriamo un problema più generale. Prendiamo il gruppo
P in(Q) = {x ∈ C(Q) | xx∗ = 1, xV x∗ ⊆ V }
e facciamolo agire su V in questo modo
ρ(x)v = α(x)vx∗ .
Vediamo che anche questo agisce via isometrie. Osserviamo infatti che per ogni
v ∈ V , vale vv = −vv ∗ . Allora
Q(ρ(x)v, ρ(x)v) = (α(x)vx∗ )(α(x)vx∗ ) = −(α(x)vx∗ (α(x)vx∗ )∗ =
= −α(x)vx∗ xv ∗ α(x)∗ = −α(x)vv ∗ α(x∗ ) = α(x)Q(v, v)α(x∗ ) = Q(v, v) .
Per mostrare che è surgettiva a questo punto è sufficiente mostrare che tutte
le riflessioni stanno nell’immagine (infatti queste generano O(Q)). Prendiamo
w ∈ V tale che Q(w, w) = −1. Allora w ∈ P in(Q) perchè w∗ = −w e ww = −1.
Mostriamo che ρ(w) = Rw dove Rw è la riflessione della forma
Rw (v) = v + Q(v, w)w .
Infatti
α(w)vw∗ = wvw = (Q(w, v) − vw)w = v + Q(w, v)w = v − Q(w, v)w
Poichè ρ è surgettiva per vedere che è un rivestimento doppio di O(Q) basta
dimostrare che il nucleo è discreto di ordine 2. Prendiamo x ∈ P in(Q) tale che
α(x)vx∗ = v
42
CAPITOLO 2. GRUPPI DI LIE
per ogni v ∈ V . Se scomponiamo x in parte pari e in parte dispari x = x0 + x1
abbiamo
α(x)v = vx ⇒ (x0 − x1 )v = v(x0 + x1 ) ⇒ x0 v − vx0 = vx1 + x1 v .
Ma il membro sinistro è dispari e il membro destro è pari, per cui
(
x0 v = vx0
x1 v = −vx1
Scrivendo il tutto in una base ortonormale otteniamo che x0 = λ ∈ C, mentre
x1 = 0. Ma dev’essere xx∗ = 1 per cui λ = ±1.
Quindi P in(Q) è un rivestimento doppio di O(Q). Ci resta solo da far vedere
che Spin(Q) è la controimmagine di SO(Q) e che Spin(Q) è connesso. Ma
prendiamo R ∈ O(Q). Questa è composizione di un certo numero di riflessioni,
per cui
R = Rw1 · · · Rwr
Ma allora
ρ−1 R = {±w1 · · · wr }
ed è chiaro che questo sta in Spin(Q) se e solo se r è pari, cioè se e solo se
R ∈ SO(Q).
Per vedere che Spin(Q) è connesso ci basta trovare un cammino tra 1 e -1.
Prendiamo v ∈ V tale che Q(v, v) = −1 e prendiamo A ∈ SO(Q) che manda
Av = −v. Allora, poichè SO(Q) è connesso possiamo trovare A(t) cammino in
SO(Q) tale che A(0) = 1, A(1) = A. Allora
E(t) = v(A(t)v)
è un cammino in Spin(Q) che congiunge 1 a -1.
Osserviamo che abbiamo dimostrato che
Spin(Q) = {±w1 · · · w2r | wi ∈ V Q(wi , wi ) = −1} .
Inoltre, poichè π1 (SO(Q)) = Z/2, abbiamo che Spin(Q) è l’unico gruppo di Lie
semplicemente connesso che ha per algebra di Lie so(Q).
Chi è il centro di Spin(Q)? Poichè il centro di SO(Q) è composto solo di
uno o due elementi (±1 o 1 a seconda che la dimensione di V sia pari o dispari),
abbiamo che il centro di Spin(Q) può essere composto al più da 4 elementi. Ci
basta quindi esibirne quattro. Prendiamo v1 , . . . , v2m base ”ortonormale“ tale
che Q(vi , vj ) = −δij . Allora
Z(Spin(Q)) = {±1, ±v1 · · · v2m } .
Infatti v1 · · · v2m commuta con tutti i vi e V genera C(Q) come algebra. Inoltre
gli elementi sono distinti perchè sono a due a due linearmente indipendenti.
L’unica domanda che possiamo porci ora è se Z(Spin(Q) sia Z/4 o Z/2 × Z/2.
Ma questo si vede con un conto diretto: se m è pari allora è Z/2×Z/2, altrimenti
è Z/4.