Circuiti elettrici in evoluzione dinamica
Scipione Bobbio - Luigi Verolino
Scrivere e ... vivere con leggerezza
non è solo un obiettivo, ma anche un ... ideale.
2 - Circuiti elettrici in evoluzione dinamica
3 - Circuiti elettrici in evoluzione dinamica
Indice
Prefazione
Capitolo 6
Circuiti funzionanti in condizioni variabili nel tempo
Capitolo 7
Reti in regime sinusoidale
Capitolo 8
Applicazioni del regime sinusoidale
Capitolo 9
Sistemi trifasi
4 - Circuiti elettrici in evoluzione dinamica
5 - Circuiti elettrici in evoluzione dinamica
Prefazione
Questo volume contiene sostanzialmente lo studio delle reti lineari di bipoli e
doppi bipoli in regime sinusoidale (cioè in ‘corrente alternata’), includendo,
naturalmente, anche i circuiti trifasi.
Lo studio dei circuiti lineari in condizioni ‘transitorie’ viene effettuato per mezzo
del simulatore circuitale Spice, e il testo mette l’allievo in condizione di far uso
di questo simulatore. Ciò farà sì che, oltre ad apprendere ad usare uno strumento
che gli sarà indispensabile nel corso della sua vita professionale, lo studente potrà
anche agevolmente familiarizzarsi con le dinamiche dei transitori più comuni, le
quali gli verranno proposte dal simulatore in forma di grafici chiari e completi.
Infine, grande risalto viene dato alla parte applicativa per consentire all’allievo di
rendersi conto fino in fondo se le idee esposte nel testo siano state ben assimilate.
Pertanto, con la certezza che ‘solo chi fa, sa’, questo volume, come d’altra parte
quello sui circuiti in regime stazionario, è corredato di molti esempi
completamente risolti e commentati.
S.B. - L.V.
Gennaio 2000
Mentre scrivevamo questi due volumi di Elettrotecnica, Scipione Bobbio,
sopraffatto da un male incurabile, il 22 febbraio del 2000, ci ha lasciati. Pertanto,
mi sembra giusto riportare un suo breve ricordo.
Era un uomo colto, una lucida intelligenza che offriva continuamente occasioni di
crescita a chi gli stava accanto. Spontaneo, appassionato ed appassionante nel
parlare, di grande generosità e per nulla invidioso. Nella società dell’immagine,
aveva scelto la via della discrezione ed amava lavorare sia nella ricerca, sia nella
società senza clamore, in totale dedizione.
Nato a Napoli il 23 luglio 1941 da Luigi e Maria Marone, si laureò in Ingegneria
Elettronica all’Università di Napoli Federico II nel 1965, diventando ben presto
Assistente, poi Professore Incaricato, infine Professore Ordinario dal 1980.
Insieme a Luciano De Menna, ad Oreste Greco ed al compianto Ferdinando
Gasparini, suoi carissimi amici, ha fondato la scuola di Elettrotecnica napoletana,
ormai punto di riferimento sul piano nazionale ed internazionale.
6 - Circuiti elettrici in evoluzione dinamica
Grande ricercatore ed amato didatta, ha dedicato gran parte della sua vita alla
comprensione dei fondamenti dell’Elettromagnetismo e dell’interazione del campo
con la materia.
Ha dato due grossi contributi nella sua attività di ricerca scientifica: uno
riguardante lo studio e la progettazione di macchine Tokamak per realizzare la
Fusione Termonucleare Controllata; l’altro riguardante l’interazione dei campi
elettrici e magnetici con i mezzi materiali.
È stato autore di più di cento pubblicazioni scientifiche su riviste internazionali e
di vari testi didattici e scientifici, tra i quali ricorderemo:
• Elettromagnetismo e Ottica, scritto in collaborazione con Emilio Gatti, edito da
Boringhieri nel 1984;
• Electrodynamics of materials, edito dall’Academic Press nel 2000.
Combinando la teoria classica dell’Elettromagnetismo con la Meccanica del
Continuo e la Termodinamica, ha affrontato il problema delle forze e dell’energia
nei mezzi polarizzati, contribuendo a chiarire una dibattuta controversia sulle
formule di Helmholtz e di Kelvin per le densità di forza nei dielettrici e nei
materiali magnetici. Gli ultimi lavori, alcuni scritti proprio poco tempo prima
della fine, ed il libro edito dall’Academic Press riguardano proprio questo
argomento. Nella presentazione al suo libro, Isaak Mayergoyz, professore
all’Università del Maryland ed editore della serie di Elettromagnetismo
dell’Academic Press, ha scritto: “The book reflects the broad erudition, unique
expertise, and strong interest of the author in the fundamental aspects of
electromagnetism”.
Era fermamente convinto che l’attività di ricerca servisse anche a fare la
‘manutenzione culturale’ del sapere, supporto indispensabile per il docente.
Tutti ricordiamo, ormai con nostalgia, le sue lezioni di Elettrotecnica, vissute al
limite della teatralità, in cui, quasi prendendo a pretesto le proprietà delle reti
elettriche o dei campi elettromagnetici, si poteva ascoltare un grande maestro che
insegnava come si ‘struttura il pensiero’.
7 - Circuiti elettrici in evoluzione dinamica
Scipione Bobbio ai tempi in cui era assessore al Comune di Napoli.
Lo stesso rigore, la stessa determinazione ed il forte impegno civile portò quando,
chiamato come assessore, lavorò nella prima giunta Bassolino. Questo scienziato,
prestato alla politica, è ricordato con tanto affetto da tutti coloro che, in quel
periodo, ebbero modo di interagire con lui, perché egli sapeva immedesimarsi nei
problemi della gente, da quelli dei dipendenti comunali messi in mobilità, a quelli
dei cittadini.
Grazie, insostituibile amico e maestro,
Luigi Verolino.
8 - Circuiti elettrici in evoluzione dinamica
9 - Circuiti elettrici in evoluzione dinamica
Capitolo 6
Circuiti funzionanti in condizioni variabili nel
tempo
6.1 Introduzione
6.2 Circuiti resistivi in condizioni di funzionamento non stazionario
6.3 Bipoli con memoria: l’induttore e il condensatore ideali
6.4 Altri componenti dotati di memoria: il mutuo induttore
6.4.1 Trasformatore ideale
6.4.2 Mutuo induttore
6.5 Struttura generale della Teoria dei circuiti in condizioni variabili
nel tempo
6.6 Un esempio di studio di circuito in condizioni variabili
6.7 Classificazione dei tipi fondamentali di funzionamento variabile
nel tempo
6.8 Le condizioni iniziali
6.9 Evoluzione libera
6.10 Risposta al gradino e altri esempi
Appendice: transitori in circuiti con generatori controllati
10 - Circuiti elettrici in evoluzione dinamica
Sommario
Questo capitolo fornisce una introduzione allo studio dei circuiti che
funzionano in condizioni variabili nel tempo. Particolare attenzione
verrà posta all’introduzione di nuovi elementi ‘a memoria’, induttore,
condensatore e mutuo induttore, che, a differenza del resistore, sono
capaci di immagazzinare l’energia elettrica. Non poteva mancare un
cenno ai transitori di circuiti in cui sono presenti generatori controllati.
11 - Circuiti elettrici in evoluzione dinamica
6.1 Introduzione
Nel primo volume di questa collana ci siamo volutamente limitati a trattare i
circuiti funzionanti in regime stazionario, pur sapendo bene che, nella stragrande
maggioranza dei casi, i circuiti funzionano invece in condizioni non stazionarie.
Per la verità, applicazioni importanti della ‘corrente continua’ non mancano: basti
pensare, ad esempio, a treni, tram, filobus, funivie, per i quali la ‘continua’ gioca
un ruolo importante. Anche in questi casi, però, va detto che tutti i ‘circuiti
ausiliari’ che azionano, controllano e segnalano il funzionamento degli apparati
principali funzionano in condizioni non stazionarie. Rimane vero, dunque, che, nel
panorama dei circuiti elettrici ed elettronici, la regola è il funzionamento non
stazionario mentre quello stazionario costituisce l’eccezione.
Ma, allora, perché siamo partiti a spiegarvi le cose con l’eccezione, e non con la
regola? La risposta è semplice, ed è fatta di due parti: la prima, ovvia per la
verità, è che lo studio dei circuiti in regime stazionario è generalmente più
semplice dell’altro; la seconda ragione, ancora più importante, è che, una volta che
si sia capito davvero il funzionamento dei circuiti in regime stazionario, è molto
agevole e naturale estendere l’intera trattazione al caso generale, poiché ci sono
poche cose nuove da capire rispetto a quelle già acquisite. E, una volta che le
avrete capite, il gioco sarà fatto: vedrete tra poco. Prima di entrare nel vivo delle
questioni che affronteremo nei prossimi paragrafi, però, vogliamo profittare
ancora per qualche momento di questa introduzione per accennare a un’ulteriore
distinzione che va fatta nell’ambito del funzionamento non stazionario (e che
riprenderemo alla fine del capitolo):
• funzionamento periodico (e, in particolare, regime sinusoidale, detto anche
in gergo funzionamento in corrente alternata);
• funzionamento aperiodico, detto anche ‘transitorio’ (ma quest’ultimo
termine, come si vedrà, è molto limitativo, ed è preferibile usarlo soltanto nei casi
particolari in cui, come vedremo più avanti, trova una sua giustificazione pratica).
Questa distinzione è importante sia sul piano concettuale, sia su quello pratico,
perché, tra l’altro, ci aiuta anche a cominciare a capir meglio alcune importanti
differenze che esistono fra quei circuiti che finora abbiamo considerato
indifferentemente elettrici oppure elettronici. Va detto, dunque, che i circuiti che
svolgono nelle nostre case funzioni che possiamo considerare ‘ripetitive’, come
l’illuminazione, il condizionamento ambientale, i lavori domestici (lavatrice,
aspirapolvere, lavastoviglie, frigorifero, forno) funzionano di regola in regime
sinusoidale (fatta eccezione, ovviamente, per i pochissimi attimi in cui vengono
12 - Circuiti elettrici in evoluzione dinamica
accesi o spenti, oppure ancora ‘regolati’ per far fronte a mutate esigenze). In
genere, questi dispositivi assorbono potenze elettriche (e quindi anche energie) di
un qualche rilievo: ad esempio, alcuni chilowatt di potenza (e quindi parecchi
chilowattora giornalieri di energia).
I circuiti che, invece, svolgono funzioni tipicamente non ripetitive, come il
telefono, la TV, gli impianti hi-fi, i personal computers, funzionano in condizioni
non periodiche, e quindi variabili nel tempo in modo del tutto generale. Di regola,
questi altri dispositivi, contrariamente ai precedenti (stufe, frigoriferi, ... )
assorbono livelli di potenza elettrica (e quindi anche energia) molto minori: ad
esempio, dell’ordine dei watt, delle decine o al massimo delle centinaia di watt.
Riassumendo, possiamo dire che, in gergo, vanno spesso sotto il nome di circuiti
elettrici quelli che hanno funzionamento tipicamente ripetitivo e assorbono valori
significativi di potenza ed energia elettrica (si dice che lavorano a livello di
potenza); vanno, invece, sotto l’indicazione di circuiti elettronici quelli che hanno
funzionamento tipicamente non ripetitivo, e assorbono potenze ed energie
elettriche notevolmente minori (si dice che lavorano a livello di segnale). La
distinzione non è comunque sempre così netta, e qualche ambiguità spesso rimane.
A questo punto, non ci resta che avviarci a fare il ‘grande salto’ dai circuiti in
regime stazionario a quelli funzionanti in condizioni qualsiasi. Lo faremo nei
prossimi paragrafi, ma, come al solito, con la massima gradualità, in modo da
portarvi alla meta ... senza scossoni. Nel prossimo paragrafo, perciò, ci
limiteremo a considerare una particolare classe di circuiti (quelli soltanto
resistivi), in cui il passaggio dal regime stazionario a quello non stazionario non
comporterà concettualmente alcuna novità: sarà soltanto questione di ... pazienza
(e Spice, vedrete, ci verrà in aiuto ancora una volta per risparmiare fatica).
Nei paragrafi successivi, invece, entreremo davvero nel vivo delle questioni,
affrontando i veri ‘fatti nuovi’ che nascono nel funzionamento non stazionario, e
che - come vedremo - traggono origine dal fatto che dovremo prendere in
considerazione componenti nuovi (diversi da quelli finora considerati), e che si
comportano in modo concettualmente e praticamente diverso dai resistori.
Ma ... andiamo per gradi ed esaminiamo una cosa alla volta.
6.2 Circuiti resistivi in condizioni di funzionamento non stazionario
In questo paragrafo, ci limiteremo a prendere in considerazione circuiti dello
stesso tipo di quelli di cui ci siamo occupati nella prima parte, con una importante
differenza: i generatori (di tensione o corrente) che li ‘alimentano’ non sono più
stazionari, bensì, come si dice in gergo, tempo varianti. Chiariamo subito cosa sia,
ad esempio, un generatore di tensione tempo variante. È molto semplice: è un
13 - Circuiti elettrici in evoluzione dinamica
bipolo la cui tensione ai morsetti è assegnata come funzione del tempo, che
indicheremo solitamente con e(t), indipendentemente dai circuiti nei quali il
generatore stesso può essere inserito. Fra un attimo, faremo degli esempi, e
mostreremo pure come sia possibile realizzare, almeno in linea di principio, simili
oggetti. Per ora, comunque, quel che ci preme sottolineare è che l’unica differenza
esistente fra un generatore indipendente di tensione stazionaria e uno tempo
variante è che, nel primo caso, la tensione ai morsetti è rappresentata da un
numero assegnato (e quindi costante nel tempo), mentre, nel secondo caso, è
rappresentata da un’assegnata funzione del tempo e(t). In entrambi i casi,
comunque, il generatore è in grado di erogare qualsiasi valore di corrente
(anch’essa, in generale, funzione del tempo) a seconda dei circuiti nei quali esso è
inserito. Per non lasciare le cose troppo nel vago, mostriamo subito come sia
possibile concepire generatori tempo varianti, purché si disponga di un
semplicissimo bipolo, il cosiddetto interruttore ideale. Naturalmente, i veri
generatori tempo varianti sono fatti diversamente, e ce ne occuperemo
diffusamente in altri volumi di questa collana, specie quello dedicato alle
‘Macchine Elettriche’; per il momento, quel che ci accingiamo a dire è più che
sufficiente per i nostri scopi. Cos’è, dunque, un interruttore ideale?
T
Figura 6.1: simbolo dell’interruttore ideale.
Un semplicissimo bipolo che presenta due possibili stati di funzionamento, indicati
solitamente come chiuso e aperto (oppure, in gergo, on e off): il punto essenziale è
che il passaggio da uno stato all’altro è deciso da noi, a piacer nostro premendo un
tasto, pigiando un pulsante, o in qualsiasi altro modo. I due stati dell’interruttore
ideale corrispondono a quello di corto circuito ideale (interruttore ‘chiuso’, o in
‘on’), e di circuito aperto ideale (interruttore ‘aperto’, o in ‘off’). Per questo
motivo, l’interruttore ideale è solitamente rappresentato graficamente come in
Figura 6.1, nella quale il tasto T si suppone mobile in modo da poter essere chiuso
e riaperto a nostro piacimento (in Figura 6.1, è in posizione aperto, ovviamente).
Ritornando ora al modo in cui si possa concepire, almeno in linea di principio, un
semplicissimo generatore di tensione tempo variante, basta pensare a un
bipolo del tipo schematizzato in Figura 6.2.
14 - Circuiti elettrici in evoluzione dinamica
+
+
A
E2
−
e(t)
I1
I2
+
E1
−
−
B
Figura 6.2: un semplice generatore di tensione tempo variante.
Esso è costituito, come si vede, da due generatori indipendenti di tensione
stazionaria di f.e.m. rispettive E 1 e E 2, nonché dagli interruttori ideali I1 e I2,
disposti come in Figura 6.2.
+
+
A
E2
−
I1
I2
e(t) = E 1
+
E1
−
−
B
Figura 6.3: l’interruttore I1 è aperto, I2 è chiuso.
15 - Circuiti elettrici in evoluzione dinamica
È facile rendersi conto che la tensione che si presenta ai morsetti del bipolo
equivalente A-B dipende dagli stati dei due interruttori ideali. Se, infatti, teniamo
aperto I1 e chiuso I2, come in Figura 6.3, la tensione ai morsetti A-B è pari alla
f.e.m. E 1. Per convincersene, basta applicare la LKT alla maglia
A - I2 - E 1 - B - A. Se, invece, chiudiamo I1 e apriamo I2, come in Figura 6.4, la
tensione tra A e B diventa pari alla somma E 1 + E 2. Possiamo quindi concludere
che, manovrando a piacere i due interruttori ideali, siamo facilmente in grado di
concepire un generatore di tensione tempo variante, la cui tensione ai morsetti A e
B cambi nel tempo in maniera largamente arbitraria (pur essendo, in questo caso,
costante a tratti).
+
+
A
E2
−
I1
e(t) = E 1 + E 2
I2
+
E1
−
−
B
Figura 6.4: l’interruttore I1 è chiuso, I2 è aperto.
e(t)
E1 + E2
E1
0
t1
t2
t3
t4
t5
t6
t
Figura 6.5: un possibile andamento temporale della tensione e(t).
16 - Circuiti elettrici in evoluzione dinamica
In Figura 6.5 abbiamo riportato una esempio di tensione variabile a tratti.
Sapreste dire cosa accade quando entrambi gli interruttori sono chiusi?
È ovvio, inoltre, che, se invece di disporre di due soli generatori stazionari e
altrettanti interruttori, si dispone di quanti si vuole generatori stazionari di f.e.m.
qualsiasi e interruttori, è possibile costruire molto facilmente generatori tempo
varianti la cui tensione ai morsetti possa essere assegnata praticamente a piacere
come funzione del tempo e(t), come, ad esempio, quella mostrata in Figura 6.6.
e(t)
0
t
Figura 6.6: una ‘forma d’onda’ un po’ più complicata.
In maniera del tutto simile, naturalmente, possono essere definiti e concepiti i
generatori indipendenti di corrente tempo varianti: si tratta di bipoli che erogano
correnti i(t) il cui andamento nel tempo è assegnato indipendentemente dai circuiti
nei quali sono inseriti, mentre le tensioni ai loro capi possono essere, in linea di
principio, arbitrarie.
A questo punto, armati di questi nuovi dispositivi, non ci resta che provare a
studiare il funzionamento di qualche semplice esempio di circuito contenente
soltanto generatori tempo varianti, nonché resistori.
Ciò che va chiarito ancora una volta, ove ce ne fosse ancora bisogno, è che i mezzi
cui faremo ricorso sono sempre gli stessi, e cioè le onnipresenti LKC e LKT,
nonché le caratteristiche dei bipoli e dei doppi bipoli presenti nei circuiti: e
null’altro!
Consideriamo, allora, il semplicissimo circuito rappresentato in Figura 6.7, in cui
si suppone che il generatore di tensione sia tempo variante, e che la sua f.e.m. sia
quella rappresentata nella stessa figura con E 1 = 100 V, E 2 = 50 V, E 3 = - 100 V,
t1 = 20 s, t2 = 70 s, t3 = 110 s. Siano, inoltre, R = 20 Ω e R1 = R2 = 10 Ω.
17 - Circuiti elettrici in evoluzione dinamica
R
i
i1
+
e(t)
R1
i2
R2
−
e(t)
E1
E2
t1
0
t2
t3
t
E3
Figura 6.7: primo esempio di circuito tempo variante.
Dopo aver compiuto le operazioni di rito (scelta delle correnti sui diversi rami),
ci proponiamo di determinare innanzitutto le correnti i(t), i1(t) e i2(t) circolanti nel
circuito.
A questo scopo, basterà considerare i tre intervalli di tempo, distinti fra loro, in
cui la e(t) assume separatamente i tre valori costanti, E 1, E 2 e E 3, e risolvere il
circuito in ciascuno dei tre casi come se fosse, di per sé, in regime stazionario (e
cioè dimenticandosi temporaneamente degli altri due). Si tratterà, insomma, di
risolvere per tre volte, consecutivamente, lo stesso circuito, cambiando soltanto la
f.e.m. del generatore presente.
i
R
+
e(t)
R0
−
Figura 6.8: circuito semplificato.
18 - Circuiti elettrici in evoluzione dinamica
Ormai, siete diventati bravi a risolvere circuiti, e concluderete subito che, in
ultima analisi, R1 e R2 sono fra loro in parallelo e possono essere sostituiti da un
resistore R0 = 5 Ω, posto in serie a R, come mostrato in Figura 6.8.
La soluzione è dunque immediata, perché, in corrispondenza dei diversi valori di
f.e.m. del generatore, si ha:
• per t compreso tra 0 s e 20 s, e(t) = 100 V, e quindi
i = 100 A = 4 A , i1 = i2 = i = 2 A ;
25
2
• per t compreso tra 20 s e 70 s, e(t) = 50 V, e quindi
i = 50 A = 2 A , i1 = i2 = i = 1 A ;
25
2
• per t compreso tra 70 s e 110 s, e(t) = - 100 V, e quindi
i = - 100 A = - 4 A , i1 = i2 = i = - 2 A .
25
2
Si vede che, ovviamente, le tre correnti i i1 e i2 variano anch’esse nel tempo come
la e(t). In Figura 6.9 è riportato l’andamento della sola i(t), per semplicità.
i(t)
4
2
0
t1
t2
t3
t
-4
Figura 6.9: andamento temporale della corrente i(t).
A questo punto, il metodo di soluzione di circuiti di questo tipo dovrebbe essere
chiaro, e può essere riassunto così: indipendentemente dalla variabilità nel tempo
del generatore (o dei generatori) presente basta risolvere il circuito in ogni istante
19 - Circuiti elettrici in evoluzione dinamica
come se fosse in regime stazionario, utilizzando naturalmente i valori dei
generatori (di tensione e di corrente) effettivamente presenti in ciascuno degli
istanti considerati. Si tratta, in ultima analisi, di armarsi si pazienza, e ripetere
tante volte i calcoli fino a ottenere tutti i risultati che si desiderano.
Anche in questo caso, come si accennava in precedenza, Spice può esserci di
grande aiuto, facendoci risparmiare fatica perché c’è addirittura una sua specifica
istruzione che ci consente di fare automaticamente col computer ciò che altrimenti
dovremmo fare ‘a mano’: si tratta dell’istruzione ‘.DC’.
Fino ad ora abbiamo imparato a risolvere una rete in continua con Spice e a
ricavare alcune informazioni come la potenza erogata dai generatori indipendenti
di tensione. L’istruzione ‘.DC’ permette di risolvere una rete quando un
generatore indipendente varia entro un intervallo di valori. Consideriamo di
nuovo l’esempio disegnato in Figura 6.10, descritto delle istruzioni, di seguito
riportate.
Esempio 1
* Esempio di circuito in continua
R1
1
3
2
R2
1
2
4
R3
3
0
10
R4
2
0
4
VE
1
0
100
IJ
2
3
4
.END
I2
1
I
I1
R1
J
R2
+
3
E
−
2
R3
R4
E = 100 V
J=4A
R1 = 2 Ω
R2 = 4 Ω
R3 = 10 Ω
R4 = 4 Ω
I3
0
I4
Figura 6.10: un esempio per illustrare l’uso dell’istruzione ‘.DC’.
20 - Circuiti elettrici in evoluzione dinamica
L’istruzione (inserita proprio prima dell’istruzione ‘.END’)
.DC
VE
90
110
1
fa sì che l’analisi in corrente continua venga effettuata considerando il generatore
di tensione VE che assume valori tra 90 V e 110 V con un incremento di 1 V. In
altri termini, Spice risolve il circuito una volta per VE = 90 V, poi per
VE = 91 V, fino a VE = 110 V.
Per ogni valore del generatore VE potete richiedere, mediante l’istruzione
‘.PRINT DC’, la stampa di una o più grandezze di interesse e otterrete nel file di
uscita una tabella in cui la prima colonna contiene i valori assunti dal generatore
che varia e le successive contengono le grandezze richieste.
Si noti che non conta il valore 100V che compare nella riga in cui definiamo il
generatore che faremo variare
VE
1
0
100 ,
in quanto esso sarà sostituito dal valore di volta in volta imposto dall’istruzione
‘.DC’. Tale valore, di solito, viene posto a zero proprio per ricordare che il
generatore è incluso in un istruzione ‘.DC’.
L’istruzione ‘.DC’ permette anche di far variare due generatori indipendenti
contemporaneamente; questa possibilità è particolarmente utile per ricavare le
caratteristiche di uscita dei doppi bipoli (per esempio, del transistore)
.DC
VE
90
110
1
IJ
0
4
0.5 .
Stavolta facciamo variare anche il generatore IJ tra 0 A e 4 A con incrementi di
0.5 A. Il file di uscita conterrà ancora una tabella in cui per ogni valore di VE
avremo i valori assunti dalle grandezze richieste per tutti i valori di IJ.
Per ottenere nella tabella anche i valori assunti da IJ bisogna ricorrere a un
generatore di tensione usato come amperometro, posto in serie a IJ.
Prima di concludere questo paragrafo, è importante fare un’ultima osservazione,
che ci riuscirà utile più avanti nei paragrafi seguenti.
L’osservazione, peraltro semplicissima, è che tutto quello che abbiamo detto in
questo paragrafo può essere riassunto così: per risolvere qualsiasi circuito
resistivo, alimentato da generatori tempo varianti, basta scrivere le equazioni del
circuito lasciando soltanto indicate le funzioni che rappresentano le f.e.m. dei
generatori di tensione (e le correnti di quelli di corrente), e risolvere, senza
21 - Circuiti elettrici in evoluzione dinamica
specificare in partenza il valore di t al quale si riferiscono. Con riferimento, ad
esempio, al circuito di Figura 6.8, basta scrivere la soluzione generale, valida per
ogni t, nella forma:
i(t) = e(t) , i1(t) = i2(t) = i(t) .
R + R0
2
Il punto importante è che, in questo modo, la soluzione generale del problema,
valida per ogni t, è stata ottenuta scrivendo e risolvendo equazioni nelle quali
compare il ‘parametro’ esprimente l’istante di tempo t, che, in partenza, può
assumere qualsiasi valore, a patto che, ad ogni suo valore, corrisponda nelle
equazioni il valore ‘giusto’ (e cioè corrispondente allo stesso t) di e(t).
6.3 Bipoli con memoria: l’induttore e il condensatore ideali
Se tutti i circuiti funzionanti in condizioni variabili nel tempo fossero del tipo che
abbiamo trattato nel paragrafo precedente, potremmo dire di avere praticamente
concluso il nostro studio dell’intera Teoria dei circuiti, e di poter terminare qui
questo libro. Ma, per fortuna, le cose non stanno così.
Per ... sfortuna, altro che per fortuna, penserete voi: sarebbe bello poter smettere
di studiare tutta questa roba, sapendo di aver già imparato tutto quello che c’è da
imparare. E, invece, sarebbe proprio un gran male, se le cose stessero così, perché
l’utilizzazione dell’energia elettrica si ridurrebbe, in ultima analisi,
all’illuminazione, al riscaldamento e a poco più. Non disporremmo, invece, delle
sconfinate possibilità che sono offerte dai fenomeni fondamentali
dell’Elettromagnetismo e delle sue bellissime leggi. Non disporremmo, ad
esempio, delle onde elettromagnetiche, e quindi di radio, TV, telefoni satellitari,
radar, né delle infinite opportunità offerte dall’Informatica e dalla Telematica, con
i loro computers, le loro reti (Internet in testa alle altre), né delle insostituibili
apparecchiature biomediche che consentono oggi di curarci (TAC, NMR, PET).
In ultima analisi, converrete facilmente anche voi che, senza tutte queste cose, il
mondo sarebbe incomparabilmente più ‘povero’ di opportunità di ogni tipo.
Ma, per fortuna, dicevamo, le cose non stanno così.
E, a guardare bene, la ragione ultima per cui i circuiti funzionanti in condizioni
variabili nel tempo offrono le sconfinate possibilità che offrono è che, oltre ai
generatori tempo varianti e ai bipoli e doppi bipoli resistivi, esistono altri tipi di
componenti, che si comportano in modo completamente diverso, e che
indicheremo genericamente come componenti dotati di memoria (in opposizione ai
resistori che, come vedremo subito, ne sono invece privi).
22 - Circuiti elettrici in evoluzione dinamica
Tra questi ‘nuovi’ tipi di componenti che ci accingiamo a introdurre subito, i più
semplici e senza dubbio più importanti sono:
• l’induttore ideale;
• il condensatore ideale.
In questo paragrafo, cominceremo col definire che cosa essi siano; li esamineremo
uno alla volta, e ne spiegheremo più chiaramente possibile il funzionamento dal
punto di vista circuitale. Ci sforzeremo inoltre di spiegare bene i motivi per cui
essi si comportano in modo totalmente diverso dai resistori, e offrono quindi
opportunità che i resistori stessi neppure si sognano.
Quel che, invece, non potremo fare (perché non ne abbiamo ancora gli strumenti
concettuali), è spiegarvi cosa c’è davvero dentro ciascuno di questi bipoli, né come
funzionano dal punto di vista fisico. Ma questo sarà compito del volume in cui
tratteremo le leggi dell’Elettromagnetismo. Per ora, andiamo come al solito per
gradi, e facciamo una cosa alla volta: impariamo a usarli nei circuiti.
L’induttore ideale
Abbiamo più volte detto che, in regime stazionario, definire un bipolo dal punto
di vista circuitale vuol dire, in ultima analisi, assegnarne la caratteristica statica, e
cioè la funzione che consente di determinare il valore della tensione V da
applicare ai morsetti del bipolo quando si vuole che la corrente che in esso circoli
valga I [oppure, viceversa, determinare I quando sia nota V].
Ricordiamo, ad esempio, che la caratteristica statica di un resistore è esprimibile
come
V = ± R I , con R ≥ 0 ,
(6.1)
(il segno a secondo membro è ‘+’, se si è fatta per il resistore la convenzione
dell’utilizzatore; il segno ‘-’, in caso contrario). Non a caso, una caratteristica di
questo tipo è detta statica, poiché il tempo t non vi figura in alcun modo.
Diremo invece che una caratteristica è dinamica, se il tempo t vi compare in modo
esplicito. D’altra parte, è anche ovvio che - se proprio lo desideriamo - non ci
vuole molto a far comparire la variabile t in una relazione del tipo (6.1); basta,
infatti, dire che essa vale in ogni istante di tempo, e scrivere quindi:
v(t) = ± R i(t) , con R ≥ 0 .
(6.2)
23 - Circuiti elettrici in evoluzione dinamica
Con ciò, la variabile t è presente, questa volta, e la (6.2) potrebbe essere vista non
più come una caratteristica statica, bensì dinamica. In realtà, però, quello di cui
stiamo parlando è un fatto di forma, più che di sostanza, perché la (6.2) non dice
nulla di più di quanto dica la (6.1), e cioè che, in ogni istante t, per ottenere v(t) a
quell’istante, basta moltiplicare per R (a parte il segno ‘±’) il valore della i(t) nello
stesso istante. E tutto questo era già contenuto anche nella (6.1), pur senza
esplicitare la variabile t.
Le cose stanno, invece, in modo completamente diverso per l’induttore ideale,
perché, come vedremo fra un attimo la sua caratteristica è davvero dinamica, e
cioè contiene la variabile t in maniera sostanziale e non soltanto formale.
i(t)
+
L
v(t)
−
Figura 6.11: simbolo dell’induttore ideale.
L’induttore ideale, solitamente rappresentato nei circuiti come indicato in Figura
6.11, è un bipolo la cui caratteristica è, per definizione
v(t) = ± L d i(t) , con L ≥ 0 ,
dt
(6.3)
nella quale L è un numero (non negativo) che caratterizza l’induttore (come la
resistenza caratterizza il resistore), prende il nome di induttanza (oppure
coefficiente di autoinduzione) dell’induttore, e si misura in henry (H). Inoltre, il
segno a secondo membro della (6.3) è ‘+’ se si è fatta per l’induttore la
convenzione dell’utilizzatore (come in Figura 6.11); è ‘-’ in caso contrario
(convenzione del generatore).
Come si vede, la (6.3) è una vera caratteristica dinamica, poiché la variabile t vi
figura in maniera sostanziale attraverso l’operazione di derivata rispetto a t della
funzione i(t), a secondo membro. In altre parole, non è possibile, in questo caso,
eliminare la variabile t, senza che nulla cambi (come è, invece, possibile per la
caratteristica del resistore). Eliminare la variabile t, infatti, obbligherebbe a
24 - Circuiti elettrici in evoluzione dinamica
eliminare anche la derivata della funzione i(t) rispetto a t. Ma, eliminare la
derivata equivarrebbe a ... ‘gettar via il bambino insieme con l’acqua sporca’.
Per essere il più possibile chiari, sottolineiamo che, per ottenere il valore della
tensione v(t) a un dato istante t, occorre moltiplicare per il numero L non il
valore di i(t) allo stesso istante t, bensì il valore della derivata rispetto a t della
corrente, calcolata nello stesso istante t. Tutto ciò conferma, come si vede,
l’aspetto sostanziale e non formale della presenza della variabile t in una
caratteristica dinamica come la (6.3).
Chiariti questi primi punti essenziali, ci proponiamo ora di mettere in evidenza le
differenze fondamentali che passano fra il comportamento circuitale di un
resistore e quello di un induttore ideale. A questo scopo, mettiamo a confronto le
principali differenze che derivano dalle caratteristiche dei due componenti (per
semplicità, facciamo per entrambi la convenzione dell’utilizzatore).
Resistore
A) Caratteristica:
v(t) = R i(t) , con R ≥ 0 .
B) In ogni istante t, per un fissato valore di i, resta determinato (per una data R)
il valore di v nello stesso istante. Ad esempio sia R = 10 Ω e t = 2 s; per
i(2) = 5 A, si ha v(2) = 10 ⋅ 5 = 50 V.
Se, poi, si prova a variare bruscamente (cioè di ‘scatto’) il valore della tensione
applicata, portandolo istantaneamente, che so, a 100 V, la corrente cambia
anch’essa istantaneamente, portandosi, in questo esempio, a 10 A. La stessa cosa si
verifica, ovviamente, se, invece che aumentare la tensione applicata, la riduciamo:
la corrente si riduce anch’essa istantaneamente nella misura imposta dalla
caratteristica del resistore. In altre parole, la corrente nel resistore ‘risponde’
istantaneamente alle variazioni di tensione applicata senza alcuna ‘esitazione’. È
come una automobile che abbia una ‘ripresa’ fortissima: è sufficiente schiacciare
l’acceleratore perché l’auto acceleri istantaneamente. In questo senso, è come se il
resistore non avesse alcuna memoria della situazione in cui si trovava a funzionare
prima che facessimo variare la tensione ad esso applicata.
C) La caratteristica statica può essere rappresentata con un grafico.
D) La tensione v è sempre dello stesso segno di i, perché R è positiva. Ne deriva
che le cariche positive, in un resistore, ‘cadono’ sempre dai punti a potenziale più
alto a quelli a potenziale più basso.
25 - Circuiti elettrici in evoluzione dinamica
E) La potenza elettrica assorbita è, in ogni istante, trasformata tutta in calore per
effetto Joule. Il resistore è come un colabrodo che non riesce a trattenere
nemmeno un po’ di energia elettrica.
Induttore
A) Caratteristica:
v(t) = L d i(t) , con L ≥ 0 .
dt
B) In ogni istante t, per un fissato valore di i, v può assumere qualsiasi valore
nello stesso istante. Ad esempio, sia L = 2 H e t = 2 s; consideriamo due casi tipici:
•
••
i1(t) = 2.5 t ; i1(2) = 2.5 ⋅ 2 = 5 A ;
i2(t) = 10/t ; i2(2) = 10/2 = 5 A ,
nei quali i(2) ha lo stesso valore (5A). Calcoliamo, ora, nei due casi, le
corrispondenti tensioni, ottenendo:
•
d i 1(t) = d 2.5 t = 2.5 ;
dt
dt
••
d i 2(t) = d 10 = - 10 .
dt
dt t
t2
Quindi:
•
v1(2) = 2 ⋅ 2.5 = 5 V ;
••
v2(2) = - 2 ⋅ 10 = - 5 V ≠ v 1(2) !
4
Come si vede, v2(2) è addirittura di segno opposto, in questo caso particolare, a
v1(2), a parità di corrente nell’istante considerato.
Il punto centrale da capire è che, nell’induttore, un brusco aumento della tensione
applicata non provoca un aumento altrettanto brusco della corrente (come avviene,
invece, nel resistore), ma soltanto una accelerazione nella crescita della corrente.
Da questo punto di vista, l’induttore è come un’auto dotata di scarsa ‘ripresa’ (e la
26 - Circuiti elettrici in evoluzione dinamica
ripresa è tanto peggiore quanto maggiore è l’induttanza L!). Quando ‘schiacciamo
l’acceleratore’ della tensione applicata, la corrente aumenta, sì, ma con gradualità,
non istantaneamente: è proprio come se l’induttore conservasse una certa memoria
della condizione in cui funzionava prima. Per questo, lo consideriamo dotato di
memoria.
i1(t)
i2(t)
I0
0
t0
t
Figura 6.12: intersezione tra due correnti.
Per rendere il fenomeno ancora più evidente, osserviamo esplicitamente che
diverse funzioni i(t) possono avere, nello stesso istante, lo stesso valore, ma diversi
valori della derivata rispetto a t, come suggerisce la Figura 6.12.
All’istante t0, sia i1(t) che i2(t) hanno il valore I0, ma la derivata di i1(t) è positiva
(la curva è inclinata verso l’alto), mentre la derivata di i2(t) è negativa (la curva è
inclinata verso il basso).
C) La funzione che descrive la caratteristica statica non esiste, e non può quindi
essere rappresentata da alcun grafico.
D) Il segno di v non dipende da quello di i, perché dipende dal segno della
derivata di i. Ne deriva che le cariche positive, in un induttore, possono sia
‘cadere’ dai punti a potenziale più alto, sia fare il contrario, cioè ‘risalire’ dai
punti a potenziale più basso a quelli a potenziale più alto.
E) La potenza elettrica assorbita da esso è, in ogni istante, immagazzinata e
neppure una piccola parte viene trasformata in calore. L’induttore è come un
serbatoio di energia privo completamente di buchi. L’energia (detta magnetica in
questo caso) accumulata in un induttore è data, in ogni istante da:
UL = 1 L i(t)
2
2
.
(6.4)
27 - Circuiti elettrici in evoluzione dinamica
Essa dipende, quindi, soltanto dal valore della corrente che circola nell’induttore
in quell’istante (e non dalla tensione applicata ai suoi morsetti).
In regime stazionario, l’induttore si riduce a un semplice corto circuito, poiché i è
costante nel tempo, e la sua derivata è quindi nulla. Si ha, dunque:
v(t) = L d i(t) = L ⋅ 0 = 0 !
dt
Ecco perché, in regime stazionario, non ne abbiamo proprio parlato.
Il condensatore ideale
Il condensatore ideale, schematizzato solitamente nei circuiti come in Figura 6.13,
è un bipolo la cui caratteristica è, per definizione:
i(t) = ± C d v(t) , con C ≥ 0 ,
dt
(6.5)
nella quale C è un numero (non negativo) che caratterizza il condensatore (come
l’induttanza L caratterizza l’induttore), prende il nome di capacità del
condensatore, e si misura in farad (F); inoltre, al secondo membro della (6.5), il
segno presente è ‘+’ se si è fatta la convenzione dell’utilizzatore (come in Figura
6.13); altrimenti, se cioè si è fatta la convenzione del generatore, il segno è ‘-’.
C
i(t)
−
+
v(t)
Figura 6.13: simbolo del condensatore ideale.
Come si vede, anche in questo caso (come per l’induttore), la (6.5) rappresenta
una caratteristica dinamica ‘vera’, poiché la variabile t vi figura in maniera
sostanziale attraverso l’operazione di derivazione proprio rispetto alla variabile t!
28 - Circuiti elettrici in evoluzione dinamica
Dal punto di vista circuitale, il condensatore si comporta in maniera per così dire
‘simmetrica’ (in gergo, si dice duale), rispetto all’induttore. In parole povere, ciò
significa che tutto quello che abbiamo detto a proposito dell’induttore, possiamo
ripeterlo a proposito anche del condensatore, a patto di scambiare sempre tra loro
le parole tensione e corrente. Così, ad esempio, potremo dire che, in ogni istante,
il valore della corrente circolante nel condensatore è indipendente dal valore della
tensione applicata in quello stesso istante al condensatore, ma è invece
proporzionale alla derivata nel tempo di questa tensione.
Similmente, le cariche positive possono, nel condensatore, tanto ‘cadere’ dai punti
a potenziale più alto a quelli a potenziale più basso, quanto ‘risalire’ in senso
inverso, a seconda del segno della derivata nel tempo della tensione. Continuando
nelle analogie con l’induttore, anche il condensatore è come un’auto con ‘scarsa
ripresa’ (tanto peggiore, quanto maggiore è la capacità): un brusco aumento della
corrente non determina un altrettanto brusco aumento della tensione.
In regime stazionario, il condensatore si riduce a un semplice circuito aperto, dato
che
i(t) = ± C d v(t) = 0 !
dt
Per questo, non se ne era parlato.
Anche il condensatore è un perfetto serbatoio di energia elettrica, senza buchi.
L’energia immagazzinata in un condensatore, in ogni istante, dipende soltanto
dalla tensione applicata ai suoi morsetti, e vale:
UC = 1 C v(t)
2
2
.
(6.6)
Per motivi del tutto analoghi a quelli validi per l’induttore, anche il condensatore
ideale è considerato, evidentemente, bipolo ‘dotato di memoria’.
Prima di concludere questo paragrafo, va detto che, naturalmente, i componenti
che, nella pratica, vanno sotto i nomi di induttore e condensatore (‘reali’, non
‘ideali’) si comportano in maniera simile a quelli ideali, ma non identica. La
principale differenza è che anch’essi sono, nella realtà, soggetti sia a pur piccole
‘perdite’ di energia: ciò significa che, inevitabilmente, durante il funzionamento di
un induttore o di un condensatore reale, una frazione sia pur modesta (di solito,
non superiore a qualche percento), della potenza elettrica assorbita si trasforma in
calore, ed è quindi trasmessa all’ambiente esterno (come una piccola stufetta, in
fondo). Come i resistori e tutti gli altri componenti, anche gli induttori e i
condensatori reali hanno, infine, una targa che serve a individuarne le effettive
29 - Circuiti elettrici in evoluzione dinamica
caratteristiche, anche dal punto di vista pratico. I dati di targa, solitamente,
contengono, per entrambi i bipoli, due informazioni essenziali:
• per l’induttore
l’induttanza L (in H), e la corrente nominale (in A),
oppure l’energia magnetica nominale (in J);
• per il condensatore la capacità C (in F), e la tensione nominale (in V),
oppure l’energia elettrica nominale (in J).
È ovvio, infatti, che componenti destinati a immagazzinare energia dell’ordine di
qualche joule dovranno avere dimensioni ben diverse da quelli destinati a
immagazzinare energia migliaia di volte (o, addirittura, milioni di volte) più
grandi. Per rendere più concrete le cose dette, discutiamo un paio di esempi (nei
quali assumiamo che il tempo t sia misurato in secondi: per questo, quando
scriveremo t = 3, intendiamo t = 3 s).
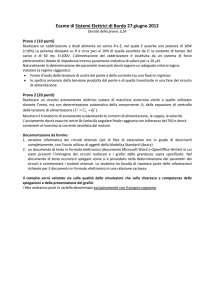
Esempio 1 - Un condensatore, supposto scarico all’istante t = 0 e di capacità
C = 2 F, viene alimentato dalla tensione
v(t) = 6 t .
Determinare la potenza e l’energia assorbite nell’intervallo 0 ≤ t ≤ 10.
70
60
i(t)
C=2F
50
40
v(t)
−
+
v(t)
30
20
i(t)
10
t
0
0
2
4
6
8
10
30 - Circuiti elettrici in evoluzione dinamica
Cominciamo col fare per il condensatore la convenzione dell’utilizzatore come
mostrato nella figura precedente. Si ha, allora (ricordate che la derivata della
semplice funzione f(t) = t è costante e pari a uno):
i(t) = C d v(t) = 2 d (6 t) = 12 d (t) = 12 .
dt
dt
dt
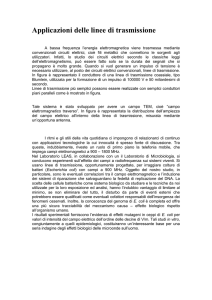
Venendo alla potenza e all’energia assorbite, non è difficile concludere che
p(t) = + v(t) i(t) = 72 t .
L’energia, invece, è pari a
UC(t) = 1 C v(t) 2 = 36 t2 .
2
Queste due grandezze sono rappresentate nella figura che segue (i valori della
potenza sono espressi, come al solito, in watt, quelli dell’energia in joule). Vale la
pena notare che, come già sappiamo, tra esse sussiste la relazione generale:
p(t) = d UC(t) .
dt
4000
3500
3000
UC(t)
2500
2000
1500
1000
p(t)
500
t
0
0
2
4
6
8
10
31 - Circuiti elettrici in evoluzione dinamica
Esempio 2 - Un induttore, supposto scarico all’istante t = 0 e di induttanza
L = 1 H , viene alimentato dalla corrente (il cui grafico è riportato nella figura che
segue):
per 0 ≤ t ≤ 2 ;
2t,
per 2 ≤ t ≤ 4 ;
i(t) = 8 - 2 t ,
0
altrove .
Determinare l’andamento della potenza e dell’energia istantanea assorbita.
L’esempio richiede la determinazione della potenza e dell’energia assorbite
dall’induttore. Fatta la convenzione dell’utilizzatore, cominciamo a calcolare la
tensione v(t) prodotta dalla corrente di alimentazione i(t):
v(t) = L d i(t) .
dt
5
4
3
2
i(t)
1
0
t
i(t) L = 1 H
-1
+
-2
v(t)
−
v(t)
-3
0
0.5
1
1.5
2
2.5
3
3.5
4
Adoperando questa relazione e ricordando le principali regole di derivazione, non
è difficile concludere che
32 - Circuiti elettrici in evoluzione dinamica
per 0 ≤ t ≤ 2 ;
2,
per 2 ≤ t ≤ 4 ;
v(t) = - 2 ,
0
altrove .
Comunque, tutto ciò che vi serve per verificare questo risultato è rappresentato
dalle formule
d t=1, d K=0,
dt
dt
dove K è un qualsiasi numero. Nella figura precedente sono rappresentate le due
funzioni, corrente e tensione, nell’intervallo 0 ≤ t ≤ 4; al di fuori di questo
intervallo, esse sono nulle.
Per determinate le potenza, basta eseguire il prodotto
4t,
per 0 ≤ t ≤ 2 ,
p(t) = + v(t) i(t) = 4 t - 16 , per 2 ≤ t ≤ 4 ,
0,
altrove ,
mentre l’energia magnetica immagazzinata è data dalla formula
UL(t) = 1 L i(t) 2 =
2
2 t2 ,
per 0 ≤ t ≤ 2 ,
32 + 2 t2 - 16 t ,
per 2 ≤ t ≤ 4 ,
0,
altrove .
La potenza e l’energia sono rappresentate, sempre nell’intervallo 0 ≤ t ≤ 4, nella
figura che segue.
Infine, riportiamo le istruzioni Spice per individuare un condensatore, ad esempio
di 1 mF, connesso tra i nodi 2 e 0:
C1
2
0
1e-3 ,
in cui C1 è il nome scelto. La prima lettera del nome deve essere sempre una C.
In maniera analoga per un induttore di valore, ad esempio 7 mH, connesso tra i
nodi 3 e 4, la sintassi è:
33 - Circuiti elettrici in evoluzione dinamica
L23
3
4
7e-3 ,
in cui il nome scelto è L23. Notate che per individuare un induttore la prima
lettera è sempre una L.
20
15
p(t)
10
5
UL(t)
0
t
-5
-10
-15
-20
0
0.5
1
1.5
2
2.5
3
3.5
4
Più avanti vedremo come utilizzare le condizioni iniziali per tali elementi a
memoria.
6.4 Altri componenti dotati di memoria: il mutuo induttore
Oltre agli induttori e ai condensatori, molti altri componenti (sia bipoli che doppi
bipoli) sono dotati di caratteristiche dinamiche (e non statiche), e sono molto
diffusi nelle applicazioni pratiche, sia di tipo elettrico che elettronico.
Basti pensare ai cosiddetti induttori e condensatori variabili che sono componenti
nei quali l’induttanza L e la capacità C possono essere fatte variare da noi (almeno
entro certi limiti) a piacere. In fondo, quando sintonizziamo la radio oppure la TV
su un dato canale, quel che facciamo è proprio far variare l’induttanza oppure la
capacità di uno di questi componenti (ma di questo, parleremo altrove, più
dettagliatamente).
Per il momento, non occorre specificare meglio quali siano le caratteristiche di
questi bipoli, né quelle di altri, come gli induttori e i condensatori non lineari. È
invece importante introdurre subito due particolari doppi bipoli, che useremo
34 - Circuiti elettrici in evoluzione dinamica
spesso nei capitoli restanti di questo libro: il cosiddetto trasformatore ideale e il
mutuo induttore, detto anche più semplicemente trasformatore (non ideale).
6.4.1 Trasformatore ideale
Il trasformatore ideale è un doppio bipolo lineare il cui funzionamento, con le
convenzioni fatte alle due porte in Figura 6.14, è definito dalle seguenti
caratteristiche:
v2(t) = 1 v 1(t) ,
a
(6.7)
i2(t) = - a i1(t) .
dove la costante a è detta rapporto di trasformazione; il simbolo del trasformatore
ideale è riportato in Figura 6.14.
i1(t)
a:1
i2(t)
+
+
v1(t)
−
v2(t)
−
Figura 6.14: simbolo circuitale del trasformatore ideale.
A stretto rigore, le (6.7) sono delle caratteristiche statiche (e non dinamiche),
poiché la variabile t vi figura in maniera non essenziale (in sostanza, non vi sono
derivate rispetto a t). Per questo motivo, sarebbe stato possibile includere anche il
trasformatore ideale fra i doppi bipoli trattati nel volume dedicato ai circuiti in
regime stazionario. Va detto, però, che il trasformatore ideale nella realtà non
esiste, mentre quello reale (che esiste ... e come!) presenta, come vedremo subito,
caratteristiche dinamiche e non statiche. Per questo motivo, si è preferito
includere anche il trasformatore ideale fra i doppi bipoli dinamici (pur essendo di
per sé, privo di memoria).
La potenza elettrica totale assorbita dal trasformatore ideale è nulla, in qualsiasi
condizione di funzionamento. Si ha, infatti:
35 - Circuiti elettrici in evoluzione dinamica
Pel-ass = + v1(t) i1(t) + v2(t) i2(t) = v1(t) i1(t) - 1a v1(t) a i1 (t) = 0 .
Esso, quindi, non dissipa, né immagazzina energia: si dice, in gergo, che è
trasparente alla potenza elettrica.
Una delle proprietà più importanti del trasformatore ideale può essere illustrata
dal circuito di Figura 6.15, in cui la porta secondaria è connessa a un resistore
lineare, di resistenza R. In questo caso, si ha:
v1(t) = a v2(t) = - a R i2(t) = a2 R i 1(t) .
i1(t)
a:1
(6.8)
i2(t)
+
+
v1(t)
−
v2(t)
−
R
Figura 6.15: una resistenza vista dal primario di un trasformatore ideale.
Ne segue che il bipolo equivalente ‘visto’ dai morsetti della porta primaria è un
resistore di resistenza a2R.
i1(t)
+
v1(t)
−
i2(t)
+
+
−
a v2(t) a i1(t)
v2(t)
−
Figura 6.16: realizzazione di un trasformatore ideale mediante generatori
controllati.
Ricordando, infine, quanto detto nel capitolo riguardante i doppi bipoli, un
trasformatore ideale può essere concepito mediante un generatore di corrente
controllato in corrente e un generatore di tensione controllato in tensione, come
36 - Circuiti elettrici in evoluzione dinamica
illustrato in Figura 6.16. Questo circuito equivalente suggerisce pure un modo di
simulare con Spice il trasformatore ideale.
6.4.2 Mutuo induttore
Il mutuo induttore è, per definizione, un doppio bipolo, solitamente rappresentato
negli schemi circuitali come in Figura 6.17, individuato dalle seguenti
caratteristiche dinamiche:
v1(t) = L1 d i 1(t) + M d i 2(t) ,
dt
dt
v2(t) = M d i 1(t) + L2 d i 2(t) ,
dt
dt
(6.9)
nelle quali L 1 e L 2 sono numeri non negativi che prendono il nome,
rispettivamente, di induttanza primaria e secondaria, e sono misurati in henry (H),
mentre M è un terzo parametro, che può essere sia positivo che negativo, detto
mutua induttanza, misurato anch’esso in henry (H).
Fate attenzione al piccolo dettaglio che differenzia la Figura 6.17a dalla 6.17b: si
tratta del ‘pallino’ della porta secondaria che è posto, rispettivamente, in alto
oppure in basso. Questa piccola differenza nella rappresentazione grafica ci
informa sul segno di M: se usiamo il simbolo di Figura 6.17a, stiamo dicendo che
M è positivo; viceversa, se usiamo il simbolo di Figura 6.17b, M è da ritenersi
negativo. Un piccolo dettaglio che, però, fa ... una grande differenza!
I tre numeri L 1, L 2 e M sono soggetti, inoltre, ad un’altra fondamentale
limitazione, e cioè che, in ogni caso, e per qualsiasi trasformatore, vale sempre la
seguente disuguaglianza:
M2 ≤ L 1 L 2 .
(6.10)
Un trasformatore per il quale valga nella (6.10) il segno di uguale, e cioè sia
M2 = L 1 L 2, viene detto ad accoppiamento perfetto. Per motivi che chiariremo
altrove, è conveniente pure introdurre la quantità adimensionale
k=
M ,
L1 L2
37 - Circuiti elettrici in evoluzione dinamica
detta coefficiente di accoppiamento. In forza della relazione (6.10), concludiamo
immediatamente che - 1 ≤ k ≤ 1.
Come si vede chiaramente, le caratteristiche (6.9) sono certamente dinamiche,
poiché vi figurano le derivate rispetto alla variabile t delle correnti i1(t) e i2(t).
Anche il mutuo induttore immagazzina energia magnetica (come il semplice
induttore), e non dissipa potenza elettrica in calore. L’energia immagazzinata è
esprimibile, in ogni istante, nella forma:
UM(t) = 1 L 1 i1(t)
2
2
+ 1 L 2 i2(t)
2
2
+ M i1(t) i2(t) .
i1(t)
(6.11)
i2(t)
M
+
v1(t)
+
L1
L2
−
v2(t)
(a)
−
i1(t)
i2(t)
M
+
v1(t)
−
+
L1
L2
v2(t)
(b)
−
Figura 6.17: simboli circuitali del mutuo induttore.
Come si vede, questa energia è somma di tre termini distinti:
a) il primo termine corrisponde all’energia immagazzinata in un induttore di
induttanza L 1, ed è sempre non negativo;
b) il secondo termine corrisponde all’energia immagazzinata in un induttore di
induttanza L 2, ed è anch’esso sempre non negativo;
c) il terzo termine, invece, è il cosiddetto termine di energia mutua, e può essere
sia positiva che negativa poiché tanto i1(t) e i2(t), che M possono assumere qualsiasi
segno.
38 - Circuiti elettrici in evoluzione dinamica
Quel che resta certo, però, è che la somma dei tre termini, e cioè l’intera energia
magnetica UM(t), espressa dalla (6.11), non può essere mai negativa: è positiva, o
al minimo nulla, poiché il mutuo induttore è un componente passivo.
Più avanti, quando studieremo le macchine elettriche, torneremo più diffusamente
su questo fondamentale componente, le cui applicazioni sono, come vedremo,
moltissime, e impareremo ad usarlo in maniera corretta in tutte le diverse
condizioni di funzionamento. Ma, per ora, quel che abbiamo detto può ... bastare.
È appena il caso di dire, infine, che anche nei mutui induttori ‘reali’, un po’ di
perdite ci sono, e quindi, un po’ della potenza elettrica assorbita si trasforma in
calore.
6.5 Struttura generale della Teoria dei circuiti in condizioni variabili
nel tempo
Siamo arrivati così al punto centrale di tutto questo libro, e cioè al momento in cui
stiamo per presentarvi la Teoria dei Circuiti nella sua forma più generale, valida
non soltanto in regime stazionario, bensì in qualsiasi condizione di funzionamento,
variabile comunque nel tempo.
Ricordate il quadro che vi presentammo nel paragrafo 2.5 dicendovi, allora, che
quella era la ... Bibbia del circuitista, almeno per ciò che riguardava il regime
stazionario?
Bene. Vi sorprenderà forse (ma sarà certamente una ... gradita sorpresa)
apprendere che quello stesso quadro continua a valere anche in condizioni variabili
nel tempo, con la sola differenza che, in aggiunta ai componenti considerati in
regime stazionario (tutti dotati di caratteristiche statiche e privi di memoria),
dobbiamo aggiungere anche i seguenti nuovi tipi di componenti:
• generatori di tensione e di corrente tempo varianti;
• interruttori ideali;
• induttori, condensatori, mutui induttori, e altri componenti dotati di
caratteristiche dinamiche, e quindi di ‘memoria’.
Per il resto, non cambia nient’altro: questo è il bello!
Le LK rimangono inalterate, e debbono essere valide, naturalmente, in ogni
istante. Pertanto, esse saranno enunciate come segue:
39 - Circuiti elettrici in evoluzione dinamica
LKC
in ogni istante, la somma algebrica delle correnti che circolano nei terminali
tagliati da una qualunque superficie Gaussiana è nulla;
LKT
in ogni istante, quale che sia la maglia considerata, la somma algebrica delle
tensioni è nulla.
Il numero di equazioni indipendenti esprimenti la LKC è pari al numero di nodi
meno uno, (n - 1). Il numero di equazioni indipendenti esprimenti la LKT è pari
a r - (n - 1), se r è il numero totale di rami dell’intero circuito. Il numero totale
di equazioni indipendenti esprimenti le LK è dunque pari a r, numero di rami.
I modi per costruire un sistema di maglie indipendenti sono gli stessi che erano
validi in regime stazionario (ricordate la procedura dell’albero).
Il numero di equazioni indipendenti che esprimono le caratteristiche è pari al
numero di rami del grafo dell’intero circuito. Il numero totale di incognite è il
doppio del numero dei rami (una corrente e una tensione per ogni ramo).
Riassumendo, possiamo, quindi, presentarvi di nuovo il quadro che contiene
l’intera Teoria dei Circuiti nella sua forma più generale, valida sempre.
Teoria dei circuiti in regime dinamico qualsiasi
• Protagonisti:
- bipoli, doppi bipoli e altri componenti;
- le loro grandezze fondamentali [corrente (A), tensione (V)];
- grandezze derivate [potenza (W) ed energia elettrica (J, o Wh)].
• Leggi generali: LKC e LKT, valide in ogni istante.
• Funzioni che descrivono il comportamento elettrico di ciascun componente: le
caratteristiche statiche o dinamiche.
E questa è, finalmente, la ... vera e definitiva Bibbia del circuitista!
40 - Circuiti elettrici in evoluzione dinamica
In conclusione, risolvere un circuito in condizioni di funzionamento variabili
comunque nel tempo significa pur sempre dover risolvere un sistema di 2r
equazioni in altrettante incognite: queste incognite, però, a differenza del regime
stazionario, non sono più semplici numeri, bensì funzioni del tempo. Se è vero,
quindi, che il passaggio dal regime stazionario al funzionamento variabile nel
tempo non richiede concettualmente grandi cambiamenti nella formulazione del
problema della risoluzione dei circuiti, occorre dire pure con la massima
chiarezza che i calcoli da fare per risolvere un circuito si complicano non poco,
poiché si tratterà di affrontare la soluzione di equazioni di tipo nuovo: le
cosiddette equazioni differenziali. Naturalmente, quando diciamo equazioni nuove
ci riferiamo allo studio che stiamo portando avanti in questo libro. Nella realtà,
queste equazioni sono state studiate a fondo, a partire del secolo XVII (dai soliti
Newton e Leibnitz), e sono state sviluppate poi nei secoli successivi da schiere di
illustri matematici che ci hanno spiegato come fare a risolverle, e ci hanno fornito
spesso abili ‘trucchi’ per risparmiare fatica. Quelli di voi che continueranno studi
di carattere fisico-matematico all’Università ne impareranno molti.
A noi, però, in questo libro tutto ciò interessa relativamente poco, poiché il nostro
scopo principale non è quello di imparare tecniche e trucchi matematici, bensì
quello di imparare a risolvere circuiti. A questo scopo, cercheremo di risparmiare
fatica il più possibile, ricorrendo ogni volta che potremo a Spice, che funziona
egregiamente anche in condizioni variabili nel tempo.
Prima, però, di ... abbandonarci nelle braccia di Spice, dobbiamo fare alcune cose
che sono essenziali:
• darvi, con un semplice esempio, un’idea delle difficoltà connesse con la soluzione
di un’equazione differenziale, non fosse altro che per farvi capire almeno le
difficoltà che Spice vi consentirà di scansare;
• distinguere i diversi possibili tipi di funzionamento in condizioni variabili nel
tempo, con lo scopo di capire bene quali siano i casi in cui davvero non potremo
fare altro che ricorrere a Spice, da quelli in cui, invece, come vedremo subito,
potremo disporre di un semplice ‘trucco matematico’ (inventato, o meglio,
riscoperto alla fine del secolo XIX) che ci consentirà di arrivare alla risoluzione
dei circuiti in regime sinusoidale (o, in gergo, in corrente alternata), maniera
semplicissima, e cioè, ‘a mano’, con carta e penna, senza ricorrere all’aiuto di
Spice (non fosse altro che per controllare l’esattezza dei nostri risultati).
Per questi motivi prenderemo in esame in maniera semi-quantitativa un semplice
esempio di circuito che richiede la soluzione di una semplice equazione
differenziale. Poi, classificheremo i diversi tipi possibili di funzionamento in
condizioni variabili nel tempo, e sottolineeremo quelli per i quali il ‘trucco
41 - Circuiti elettrici in evoluzione dinamica
matematico’ cui abbiamo fatto cenno prima funziona e ci consente di risolvere i
circuiti ‘a mano’, da quelli in cui, invece, non avremo altra scelta se non ...
imparare a usare correttamente Spice.
6.6 Un esempio di studio di circuito in condizioni variabili
Veniamo al semplice esempio di cui abbiamo parlato, e consideriamo il circuito
schematizzato, nella sua condizione iniziale di funzionamento, in Figura 6.18.
R
I
+
+
E
vI
−
+
−
vR
+
vL
L
−
−
i=0
Figura 6.18: l’interruttore I è aperto.
Esso è costituito, come si vede, da un generatore indipendente di tensione di f.e.m.
E costante nel tempo, collegato in serie, attraverso l’interruttore ideale I, a un
resistore di resistenza R e a un induttore ideale di induttanza L.
Nelle condizioni iniziali, cui la Figura 6.18 si riferisce, l’interruttore è aperto, e
l’induttore è supposto scarico, e cioè privo di energia immagazzinata. Ricordando
la (6.4), ciò implica che nell’induttore, in queste condizioni, non circola alcuna
corrente.
Cominciamo col chiederci quale sia la soluzione del circuito in queste condizioni.
La risposta è molto semplice e può essere ottenuta applicando, come sempre, le
LK. Dopo aver compiuto le operazioni di rito (e avere quindi introdotto le diverse
grandezze del circuito), applichiamo subito la LKC, la quale ci dice semplicemente
che esiste un’unica corrente i che percorre tutti gli elementi del circuito, poiché
essi sono in serie fra loro; aggiungendo, poi, che l’interruttore ideale è in
posizione aperto, ed equivale quindi a un circuito aperto, il valore di questa
corrente i non può che essere zero. Ne concludiamo, quindi, che, nelle condizioni
indicate, l’intero circuito non è percorso da corrente.
42 - Circuiti elettrici in evoluzione dinamica
Per quel che riguarda, poi, le tensioni, la LKT, applicata all’unica maglia esistente,
è rappresentata dalla seguente equazione (nella quale inseriamo subito la
caratteristica del generatore):
E = vI + vR + vL .
(6.12)
La caratteristica del resistore richiede che, essendo i = 0, anche vR = R i = 0. Per
quel che riguarda, invece, la tensione vL, la caratteristica dell’induttore potrebbe
consentire un valore diverso da zero, soltanto a patto che la derivata rispetto a t
della corrente i fosse diversa da zero. D’altra parte, però, affinché ciò sia
possibile, occorrerebbe che una corrente cominciasse a circolare nell’induttore (e
quindi anche negli altri elementi in serie ad esso). E ciò, finché l’interruttore
ideale è aperto, non è possibile.
Cosa dobbiamo dunque concludere? Che, fino a quando l’interruttore I è aperto, la
LKT, espressa dalla (6.12), si riduce in realtà alle seguenti semplici condizioni:
vR = 0 ,
vL = 0 ,
vI = E .
Ciò significa che tutta la tensione del generatore di tensione si ritrova applicata ai
morsetti aperti dell’interruttore ideale, e che, inoltre, questa situazione può
continuare per tempo indeterminato (e cioè stazionario), fino a quando
l’interruttore I non verrà chiuso.
Ammettiamo ora che, a un certo istante, che per comodità indicheremo con t = 0
(l’istante in cui facciamo scattare il nostro cronometro), chiudiamo bruscamente
l’interruttore I.
R
vI = 0
+
I
−
+
+
E
−
vR
+
vL
L
−
−
i
Figura 6.19: l’interruttore I è chiuso.
43 - Circuiti elettrici in evoluzione dinamica
Per comprendere cosa succede, cominciamo col rappresentare il circuito nella sua
‘nuova’ condizione, mostrata in Figura 6.19. Questa volta, come si vede,
l’interruttore I è in posizione ‘chiuso’, ed equivale dunque a un corto circuito; ne
deriva che la tensione vI applicata ai suoi morsetti non può che essere zero!
Inoltre, essendo l’interruttore chiuso, una corrente i diversa da zero può ora
circolare nell’intero circuito.
Rispetto alla situazione precedente, è cambiato, per la verità, quasi tutto, e noi ora
ci proponiamo di esaminare proprio come cambia la condizione di funzionamento
del circuito dall’istante t = 0 in poi, e cioè per t ≥ 0. Proveremo a farlo ‘passopasso’, e cioè seguendo i cambiamenti che via via intervengono dalla chiusura
dell’interruttore in poi.
Per fissare le idee anche da un punto di vista quantitativo, e non soltanto
qualitativo, assegniamo dei valori numerici (i primi che ci capitano) ai diversi
parametri E, R e L. Scegliamo, ad esempio: E = 100 V, R = 10 Ω, L = 2 H .
Cominciamo ora a scrivere tutte le equazioni che governano il funzionamento del
circuito, e cioè le LK nonché le caratteristiche dei bipoli che compongono il
circuito stesso.
La LKC ci dice semplicemente (come già più volte sottolineato) che la stessa
corrente i (da determinare istante per istante) circola in tutti i bipoli, poiché questi
sono in serie fra loro. La LKT, applicata all’unica maglia esistente, è rappresentata
ora (per t ≥ 0) dalla seguente equazione (si noti l’assenza del termine vI, che è ora
nullo):
E = vR(t) + vL(t) ,
(6.13)
nella quale abbiamo volutamente sottolineato la dipendenza di vR e di vL dal tempo
t, mentre E ne è indipendente.
Non resta, a questo punto, che aggiungere le caratteristiche del resistore e
dell’induttore
vR(t) = R i(t) , vL(t) = L d i(t) ,
dt
(6.14)
e sostituirle nella (6.13), in modo da ricondurci a un’unica equazione nella sola
funzione incognita i(t):
E = R i(t) + L d i(t) .
dt
(6.15)
44 - Circuiti elettrici in evoluzione dinamica
Sostituendo, poi, i valori numerici scelti per E, R e L, la (6.15) diventa in
definitiva:
100 = 10 i(t) + 2 d i(t) ,
dt
(6.16)
la quale deve essere verificata in ogni istante successivo alla commutazione
dell’interruttore, cioè per t ≥ 0.
Siamo giunti così al punto centrale dell’intera questione: risolvere l’equazione
(6.16) vuol dire riuscire a trovare una particolare funzione la quale, una volta
sostituita al posto di i(t), sia nel termine 10 i(t) che nel termine 2 di(t)/dt, verifichi
l’equazione stessa in ogni istante t ≥ 0. Come si vede, il problema che ci si pone è
completamente diverso da quelli ai quali siamo abituati quando affrontiamo
un’equazione algebrica del tipo a x + b = c, con x incognita, e a, b, c parametri
noti. Come già detto in precedenza, equazioni come la (6.16), nelle quali, cioè,
compaiono, come incognite, funzioni di t, (e non semplici numeri costanti), e
inoltre figura pure la derivata rispetto a t della funzione incognita, vanno sotto il
nome di equazioni differenziali, e costituiscono, di per sé, uno dei settori più vasti
e importanti di tutta la Matematica!
Non vi spaventate, quindi, se non avete (e non potete ancora avere) i mezzi per
risolverle. Ne faremo a meno, aiutandoci con Spice, che, invece, le sa risolvere
egregiamente! Per non lasciarvi, però, a ... bocca asciutta, vogliamo provare,
prima di concludere questo paragrafo, a spiegarvi come è possibile risolvere
un’equazione di questo tipo in maniera non rigorosa, ma almeno approssimata (che
è, poi, per la verità, proprio quello che fa Spice). Il trucco è semplice, ed è fatto
di tanti ‘passi’ successivi che noi seguiremo uno a uno, cominciando dal primo, per
indicare poi la strada che potrà essere seguita poi per quanti ‘passi’ si vuole, ...
senza limiti.
• Il primo passo da fare è ricavare il termine contenente la derivata della funzione
incognita i(t) dall’equazione, riscrivendo la (6.16) nella forma:
d i(t) = 50 - 10 i(t) .
dt
(6.17)
• Il secondo passo è ricavare il valore di di/dt all’istante t = 0, sapendo che, per
ipotesi, la corrente i è nulla, all’istante t = 0. Si ha, così:
d i(t)
dt
= 50 - 10 i(0) = 50 ,
t=0
45 - Circuiti elettrici in evoluzione dinamica
dove abbiamo voluto indicare con il simbolo
d i(t)
dt
t=0
proprio il valore della derivata di i(t), calcolata all’istante t = 0.
• Il terzo passo richiede innanzitutto di ricordare (paragrafo 1.5) che la derivata di
una qualsiasi funzione i(t) può essere calcolata, almeno in modo approssimato,
utilizzando l’espressione generale
d i(t)
dt
t = t1
≅ i(t 2) - i(t1) ,
t2 - t 1
(6.18)
purché i due istanti di tempo t1 e t2 siano abbastanza vicini l’uno all’altro (quanto
più lo sono, tanto più preciso è il valore che si ottiene per la derivata: ricordate?).
Notate che, nella (6.18), non abbiamo usato il simbolo di uguaglianza ma quello
(≅) di approssimativamente uguale. L’espressione (6.18) può allora essere riscritta
in modo da poter calcolare il valore di i(t2), quando si sia già calcolato il valore
della derivata all’istante t1:
i(t 2) ≅ i(t1) + d i(t)
dt
(t 2 - t1) .
(6.19)
t = t1
Questa espressione è la vera formula magica che ci fornisce la soluzione
approssimata dell’equazione differenziale, a patto di ripetere a volontà i seguenti
due passi:
a) si ricava dalla (6.17) il valore della derivata prima all’istante t = t1, cioè
d i(t)
dt
;
t = t1
b) si sostituisce questo valore nella (6.19), e si calcola i(t2), partendo dalla
conoscenza di i(t1).
Applichiamo il metodo al nostro esempio, partendo con
t1 = 0 e t2 = 0.001 ,
46 - Circuiti elettrici in evoluzione dinamica
continuando, poi, con
t1 = 0.001 e t2 = 0.002 ,
e ancora
t1 = 0.002 e t2 = 0.003 ,
e così via. Otteniamo allora (utilizzando una semplice macchinetta calcolatrice
soltanto per fare i conti) che, per t1 = 0 e t2 = 0.001, risulta:
i(0.001) ≅ i(0) + d i(t)
dt
(0.001 - 0) = 0 + 50 ⋅ 0.001 = 0.05 .
t=0
Ripetendo per t1 = 0.001 e t2 = 0.002, possiamo calcolare i(0.002):
i(0.002) ≅ i(0.001) + d i(t)
dt
(0.002 - 0.001) .
(6.20)
t = 0.001
Ma, per farlo, abbiamo bisogno del valore della derivata di i(t) calcolata non più a
t1 = 0, bensì a t1 = 0.001. Come facciamo? Semplice: ritorniamo all’equazione di
partenza (6.17), proprio quella, cioè, che dobbiamo risolvere, e applichiamola al
‘nuovo’ istante t1 = 0.001, ottenendo:
d i(t)
dt
= 50 - 10 i(0.001) = 50 - 50 (0.05) = 49.75.
t1 = 0.001
Ottenuto così il nuovo valore della derivata, ricaviamo il valore di i(0.002) dalla
(6.20):
i(0,002) ≅ i(0.001) + d i(t)
dt
(0.002 - 0.001) =
t = 0.001
= 0.05 + 49.75 ⋅ 0.001 = 0.09975 .
Volendo continuare, occorre calcolare
d i(t)
dt
t = 0.002
47 - Circuiti elettrici in evoluzione dinamica
mediante la (6.17) sostituendo in essa, a secondo membro, il valore di i(0.002) che
abbiamo appena trovato, e, poi, ricavare i(0.003) dalla (6.19), partendo dalla
conoscenza della corrente e della sua derivata per t = 0.002.
t
0
0.001
0.002
0.003
0.004
0.005
0.006
i(t)
0
0.05000000000000
0.09975000000000
0.14925125000000
0.19850499375000
0.24751246878125
0.29627490643734
A questo punto, il metodo per andare avanti ‘passo-passo’ nella soluzione
dell’equazione dovrebbe essere chiaro. Potete controllare da soli, se ne avete
voglia, che, nel nostro esempio, si ottengono i valori riportati in tabella.
Riportare in una tabella tutti i dati calcolati sarebbe troppo lungo; conviene
organizzare i dati in un grafico. Allora, se ripetiamo il calcolo per molti altri
punti, otteniamo la soluzione mostrata in Figura 6.20.
12
i(t)
10
8
6
4
2
t
0
0
1
2
3
4
5
Figura 6.20: andamento temporale della corrente i(t).
48 - Circuiti elettrici in evoluzione dinamica
La soluzione che si ottiene non è quella matematica, rigorosa, ma è comunque
sufficiente per molti scopi pratici. D’altra parte, la cosa importante è che, con
questo metodo, se si vuole migliorare l’approssimazione con cui si desidera la
soluzione, basta avvicinare gli istanti, scegliendo, ad esempio, t1 e t2 che
differiscano fra loro di 0.0005 e non di 0.001. Basta, ad esempio, cominciare con
t1 = 0, e t2 = 0.0005, e continuare con t1 = 0.0005 e t2 = 0.001, e così via.
Vale la pena di osservare, infine, che l’equazione differenziale (6.16), una volta
stabilito che i(0) = 0, cioè che la corrente parte dal valore iniziale zero, ammette
una soluzione analitica (che imparerete a trovare nel prosieguo dei vostri studi),
che vale:
i(t) = 10 1 - e-5t , per t ≥ 0 ,
(6.21)
in cui ‘e’ rappresenta la funzione esponenziale introdotta nel Capitolo 1.
Notate come la soluzione (6.21) sia uguale a zero all’istante t = 0 e controllate con
cura che il grafico riportato in Figura 6.20 corrisponde proprio alla soluzione
riportata.
Facciamo ancora un passo avanti. Scriviamo la soluzione generale del problema
differenziale (6.15), soggetto alla condizione iniziale di corrente nulla, può essere
scritta nella forma generale
i(t) = E 1 - e-t/τ , per t ≥ 0 ,
R
(6.22)
in cui la quantità τ, detta costante di tempo del circuito, vale
τ=L .
R
(6.23)
Osservate come la (6.21) costituisca un caso particolare della (6.22) e come la
costante di tempo sia un parametro caratteristico di ogni circuito e che, in qualche
misura, determini il tempo di estinzione del transitorio. Per comprenderne sino in
fondo quanto andiamo dicendo, riconsiderate la Figura 6.20: essa mostra che la
corrente raggiunge il valore finale (si dice più correttamente ‘asintotico’) in due
secondi. La costante di tempo regola proprio questo tempo nel senso che, se il
valore della costante di tempo è piccolo, il circuito raggiunge la nuova situazione
stazionaria in poco tempo, altrimenti, cioè per costanti di tempo elevate, ci vuole
più tempo a raggiungere il valore finale. Convenzionalmente si dice che il circuito
impiega un tempo pari a 5 costanti di tempo perché il transitorio si estingua.
49 - Circuiti elettrici in evoluzione dinamica
R
1
+
+
E
vR(t)
2
−
+
vL(t)
L
−
t>0
−
0
i(t)
Figura 6.21: carica del circuito RL.
Dopo un tempo sufficientemente lungo la corrente che percorre il circuito in
esame è, dunque, di nuovo costante e vale
i(t) = E , dopo un certo tempo.
R
(6.24)
Ciò vuol dire che, dopo questo tempo, l’induttanza si comporta come un corto
circuito e, pertanto, vale la (6.24). Alle stesse conclusioni si può giungere
adoperando Spice. Vediamo, allora, di capire come si simuli una rete le cui
grandezze variano nel tempo, partendo da questo semplice esempio. Nei paragrafi
successivi discuteremo altri esempi.
Come al solito, numeriamo (0, 1, 2) i tre nodi della rete, ridisegnata in Figura
6.21 per t > 0, dopo che l’interruttore ha chiuso la maglia e, pertanto, il
generatore eroga la tensione continua E. Il listato che segue può essere utilizzato
per simulare la rete.
Esempio 2
*Carica del circuito RL
VE
1
0
100
R0
1
2
10
L0
2
0
2
IC=0
.TRAN
0.02 2
UIC
.PROBE
.END
50 - Circuiti elettrici in evoluzione dinamica
La terza, la quarta e la quinta riga introducono, rispettivamente il generatore di
tensione, il resistore e l’induttore. La quinta, in particolare,
L0
2
IC=0
0
2
che descrive l’induttore, posto tra i nodi 2 e 0, di valore 2 H, è completata con
l’indicazione ‘IC=0’. Essa sottolinea il fatto che l’induttore, quando l’interruttore
commuta, non è attraversato da corrente e, quindi, la condizione iniziale di
funzionamento (Initial Condition, in inglese) è nulla. Se, come vedremo nei
paragrafi successivi, l’induttore, all’istante iniziale, fosse stato interessato da una
corrente di 2 mA, avremmo dovuto scrivere ‘IC=2m’.
La sesta riga avverte il simulatore che è nostra intenzione eseguire un’analisi
dinamica della rete, chiedendo di risolverla con un passo di 0.02 s e fino a 2 s.
Questo passo è stato scelto basandoci sul valore della costante di tempo pari a
τ = L = 2 s = 0.2 s .
R 10
Un semplice criterio che consenta all’elaboratore di non svolgere troppi calcoli
ma, al tempo stesso, di fornire risultati attendibili, è di scegliere il passo utile per
la soluzione pari a un decimo della costante di tempo. È evidente che quanto più
piccolo viene scelto questo passo, tanto più accurata è la soluzione. Tuttavia un
passo eccessivamente piccolo potrebbe rappresentare una scelta troppo onerosa da
calcolare. Un buon compromesso è quello che abbiamo indicato.
Il comando ‘.TRAN’ nella sua versione più completa è
.TRAN
TSTEP
TSTOP
TSTART
TMAX
UIC
in cui TSTEP è il passo con cui vengono visualizzati i dati calcolati, TSTOP
l’istante di arresto in cui va terminato il calcolo, TSTART è l’istante iniziale che,
se non esplicitamente indicato, viene assunto pari a zero, TMAX è il più grande
passo di elaborazione dei risultati che, se non indicato, è assunto pari a TSTEP,
UIC impone al simulatore di usare le condizioni iniziali riportate nel file (Utilize
Initial Conditions).
La penultima riga contiene il comando ‘.PROBE’ che richiede a Spice di creare, in
uscita, un nuovo file, individuato con l’estensione ‘.DAT’, che contiene tutti i dati
delle elaborazioni effettuate. Questo nuovo file può essere letto dal post-processore
grafico PROBE che è in grado di produrre grafici di alta qualità sulla base dei dati
51 - Circuiti elettrici in evoluzione dinamica
forniti. Solo un po’ di pratica vi aiuterà a rendervi conto di quanto sia più
semplice usare questo processore grafico, piuttosto che descrivere come
adoperi.
In definitiva, come avete potuto constatare, l’analisi di una rete che lavori
condizioni dinamiche non è molto più complicata di quella di una rete che operi
regime stazionario; basta ricordare il comando ‘.TRAN’ e imparare ad usare
post-processore PROBE.
...
si
in
in
il
6.7 Classificazione dei tipi fondamentali di funzionamento variabile
nel tempo
Siamo ora pronti a introdurre i concetti fondamentali che sono alla base del
funzionamento di qualsiasi circuito in condizioni comunque variabili nel tempo,
per elencare i diversi tipi di funzionamento che si incontrano nella pratica, e che
saranno studiati nei prossimi capitoli, e per spiegarvi, almeno per sommi capi, in
che cosa consistono, dandovi quindi un’idea di ... ciò che vi aspetta.
I tipi principali di funzionamento in condizioni variabili nel tempo sono quattro, e
possono essere indicati così:
• regime periodico sinusoidale (in gergo, detto anche corrente alternata);
• regimi periodici non sinusoidali;
• funzionamento transitorio;
• funzionamento in condizioni dinamiche generali.
Ciascuno di questi termini richiede, naturalmente, opportune e approfondite
definizioni e spiegazioni, che saranno date di volta in volta nei capitoli seguenti.
Per il momento, basti pensare che il regime sinusoidale è fondamentale dal punto
di vista pratico, poiché esso corrisponde alle condizioni di funzionamento normale
della maggior parte dei dispositivi elettrici, sia a livello domestico che industriale.
Inoltre, anche dal punto di vista concettuale, il regime sinusoidale è essenziale,
poiché costituisce la base per analizzare anche i regimi periodici non sinusoidali.
Vanno sotto il nome di transitorie quelle condizioni di funzionamento, solitamente
di durata limitata, in cui un circuito passa da una condizione di regime all’altra
(dello stesso tipo o di tipo diverso). Infine, tipiche del funzionamento dei
dispositivi elettronici sono le condizioni in cui ciascuna grandezza varia nel tempo
in maniera non prevedibile ‘a priori’, ma dipendente dalle informazioni che si
vogliono comunicare (si pensi alla radio, alla TV, ai telefoni, ai computers, e così
via).
52 - Circuiti elettrici in evoluzione dinamica
Nel Capitolo 7, affronteremo lo studio del regime sinusoidale, mentre i paragrafi
che seguono saranno dedicati ai transitori e al funzionamento in condizioni
dinamiche generali. Come già accennato in precedenza, il regime sinusoidale, data
la sua particolare importanza pratica, sarà studiato da noi in notevole dettaglio,
perché è essenziale che voi impariate a ‘sbrigarvela bene’ con i circuiti in corrente
alternata. Sarà importante, quindi, che voi impariate a usare bene anche quei
‘trucchi’ algebrici che ci consentono di risolvere ‘a mano’ questi tipi di circuiti.
Spice ci servirà, comunque: non fosse altro che per controllare la correttezza dei
risultati che saremo stati capaci di ottenere a mano. D’altra parte, non è affatto
detto che ... agli esami finali, vi sarà consentito di ricorrere a Spice per risolvere
un circuito in corrente alternata!
6.8 Le condizioni iniziali
Prima di affrontare lo studio di alcuni transitori in circuiti elettrici, è necessario
sviluppare alcune considerazioni sulle condizioni iniziali.
In particolare, è utile considerare le eventuali discontinuità nella tensione o nella
corrente dei bipoli a memoria per imporre le giuste condizioni iniziali.
Cominciamo a esaminare un induttore. Mentre per la tensione v(t) ai suoi capi
(quale che sia la convenzione fatta) non si può escludere qualche discontinuità, per
la corrente i(t) che la percorre non è possibile accettare discontinuità.
0
t
Figura 6.22: due funzioni, più e meno ripide, attorno all’origine.
53 - Circuiti elettrici in evoluzione dinamica
Considerando, infatti, l’energia immagazzinata nell’induttore (6.4), segue che a
una discontinuità nella corrente corrisponde una discontinuità nell’energia e,
quindi, un potenza illimitata. Ricordate che la potenza elettrica è niente altro che la
derivata dell’energia e, pertanto, se la funzione da derivare è discontinua segue che
la derivata diventa illimitata. Questo ultimo punto merita qualche ulteriore
commento.
Dato che un disegno vale più di mille parole, tentiamo di mostrare graficamente
ciò che andiamo dicendo. La Figura 6.22 mostra due funzioni del tempo, una più
pendente (tratteggiata) dell’altra (a tratto continuo) attorno all’origine. Di queste
due funzioni abbiamo fatto la derivata che è mostrata in Figura 6.23.
Ebbene, cosa si può concludere osservando la Figura 6.23? Semplicemente questo:
che la funzione più ripida presenta una derivata più alta in prossimità dell’origine.
0
t
Figura 6.23: derivate delle funzioni di Figura 6.22.
Portiamo al limite questo ragionamento: se la funzione presenta un salto in un
certo istante, presenta, cioè, una brusca variazione, allora la sua derivata diventerà
tanto più grande, quanto più la variazione della funzione è brusca. Ciò era
esattamente quello che avevamo detto a proposito della potenza e dell’energia:
l’energia non può essere discontinua dato che ciò comporterebbe una potenza
illimitata nell’istante di salto.
54 - Circuiti elettrici in evoluzione dinamica
Detto ciò, ci siamo convinti che, non potendo essere discontinua l’energia in un
induttore, la corrente non può presentare brusche variazioni, cioè deve variare
con continuità.
Se esaminiamo il caso di un condensatore, con ragionamenti del tutto analoghi a
quelli fatti per il caso dell’induttore, pur di sostituire la tensione alla corrente, si
ottiene l’impossibilità di ammettere discontinuità nella tensione.
Riassumendo, se poniamo che la manovra dell’interruttore avvenga all’istante
t = 0, si può parlare del valore che la variabile interessata assume in un istante
immediatamente precedente alla manovra dell’interruttore, e del valore che essa
assume in un istante immediatamente susseguente la manovra. Ebbene, se
consideriamo la corrente in un induttore o la tensione su un condensatore, questi
due valori devono coincidere, ovvero esse non devono presentare salti bruschi o
altre discontinuità.
In base a queste considerazioni sulle discontinuità si possono ricavare le condizioni
iniziali necessarie a risolvere le equazioni differenziali che descrivono la dinamica
di una rete. In generale, si considera il regime precedente la commutazione
dell’interruttore che dà inizio al transitorio e si calcolano i valori delle correnti
negli induttori e delle tensioni sui condensatori. Dopo aver manovrato
l’interruttore le correnti negli induttori e le tensioni sui condensatori rimangono
inalterate e costituiscono quindi le condizioni iniziali note.
Un’ultima considerazione di carattere più pratico. Per sapere quali saranno i
valori di tensioni e correnti in una rete elettrica quando il transitorio sia
terminato, supponendo di utilizzare generatori stazionari, vi ricordiamo che
induttori e condensatori si possono sostituire con dei corto circuiti e dei circuiti
aperti, rispettivamente. È ovvio, infatti, che ‘a regime’ un induttore può essere
percorso da corrente ma non ha tensione ai suoi capi, mentre una condensatore
può essere sottoposto a tensione, ma non è percorsa da corrente.
Nei prossimi paragrafi esamineremo alcuni esempi di transitori nelle reti
elettriche per rendere più concrete le cose dette.
6.9 Evoluzione libera
È giunto il momento di applicare le cose imparate per studiare la scarica dei due
principali bipoli a memoria: il condensatore e l’induttore.
Scarica del condensatore
55 - Circuiti elettrici in evoluzione dinamica
Consideriamo il circuito mostrato in Figura 6.24, in cui un condensatore,
all’istante t = 0, viene collegato ad un resistore e, poco a poco, si scarica.
La costante di tempo di questo circuito è
τ = RC = 10 ms = 0.01 s ,
mentre la tensione ai capi del condensatore, come dimostra la teoria delle
equazioni differenziali, si può scrivere come
v(t) = v(0) e-t/τ = 2 e-100t , per t ≥ 0 .
1
+
C
t=0
v(t)
v(0) = 2 V
R
R=5Ω
C = 2 mF
−
0
i(t)
Figura 6.24: scarica di un condensatore.
Da ciò segue che la corrente è pari a (si noti che sul condensatore è stata fatta la
convenzione del generatore)
i(t) = - C d v(t) = - C v(0) - 1 e-t/τ = v(0) e-t/τ = 0.4 e-100t .
dt
RC
R
Quanto detto può essere verificato con Spice per mezzo delle istruzioni seguenti.
Esempio 3
*Scarica del condensatore
C0
1
0
2m
IC=2
R0
1
0
5
.TRAN
1m
0.1
UIC
.PROBE
.END
56 - Circuiti elettrici in evoluzione dinamica
Si noti che il condensatore è carico ‘IC=2’ e che l’analisi del transitorio viene
sviluppata dal simulatore con passo di 1 ms, fino a 0.1 s.
2.5
2
Tensione
Corrente
1.5
1
0.5
t
0
0
0.02
0.04
0.06
0.08
0.1
Figura 6.25: tensione e corrente nel circuito RC.
In Figura 6.25 abbiamo riportato sullo stesso grafico l’andamento temporale della
tensione e della corrente dopo la chiusura dell’interruttore. Si noti, però, che
prima che l’interruttore colleghi il condensatore al resistore, la tensione è costante
e pari a 2 V, mentre la corrente è nulla. Ciò vuol dire che nell’istante di
commutazione la tensione si mantiene continua, mentre la corrente è discontinua.
Ancora un’osservazione: se provate a disegnare la corrente con Spice, non
troverete esattamente il grafico riportato in Figura 6.25. Ciò dipende dal fatto che,
su ogni bipolo, anche in regime dinamico, Spice considera sempre la convenzione
dell’utilizzatore.
Scarica dell’induttore
La stessa cosa fatta per un condensatore ripetiamola per un induttore (Figura
6.26).
Anche in questo caso non sarebbe difficile mostrare, grazie alla teoria delle
equazioni differenziali, che
57 - Circuiti elettrici in evoluzione dinamica
i(t) = i(0) e-t/τ = e-1000t e v(t) = R i(0) e-t/τ = 2 e-1000t ,
in cui abbiamo introdotto la costante di tempo
τ = L = 1 ms .
R
1
+
L
t=0
i(0) = 1 A
R
v(t)
R=2Ω
L = 2 mH
−
0
i(t)
Figura 6.26: scarica di un induttore.
Esempio 4
*Scarica dell’induttore
L0
1
0
2m
IC=1
R0
1
0
2
.TRAN
0.1m
10m
UIC
.PROBE
.END
Potete verificare le cose dette per mezzo di Spice che vi mostrerà pure gli
andamenti di tensione e corrente riportati nella Figura 6.27.
Ancora una volta dobbiamo notare che, prima dell’istante di manovra
dell’interruttore, la corrente dell’induttore valeva 1 A e questo valore si è
mantenuto continuo anche nell’istante t = 0, mentre la tensione era nulla prima
della commutazione ed è bruscamente salita a 2 V per poi decrescere in maniera
esponenziale. Anche in questo caso una delle due grandezze riportate in Figura
6.27 (la tensione) si presenterà nei grafici di Spice con il segno cambiato.
58 - Circuiti elettrici in evoluzione dinamica
2.5
2
Tensione
Corrente
1.5
1
0.5
t
0
0
0.002
0.004
0.006
0.008
0.01
Figura 6.27: tensione e corrente nel circuito RL.
6.10 Risposta al gradino del circuito RLC e altri esempi
Continuiamo nello studio dei transitori considerando esempi più complicati. In
particolare, cominciamo dal circuito RLC forzato con un generatore di tensione a
gradino (Figura 6.28).
1
+
vR(t)
+
R
−
C
−
2
e(t)
L
0
−
e(t) = E u(t)
+
vL(t)
−
+
i(t) 3
E
0
t
vC(t)
Figura 6.28: circuito RLC forzato con un gradino di tensione.
Nel Capitolo 1 abbiamo introdotto la funzione gradino unitario, detta anche
funzione di Heaviside, e, pertanto, il generatore di tensione imporrà la tensione:
59 - Circuiti elettrici in evoluzione dinamica
e(t) = E u(t) =
E ,
per t > 0 ,
0 ,
per t < 0 .
(6.25)
Dato che la rete è a riposo per t < 0, possiamo assumere che sia la corrente
dell’induttore i(t), sia la tensione sul condensatore vC(t) siano nulle, e, quindi, le
due condizioni iniziali sono:
i(0) = 0 , vC(t) = 0 .
Scriviamo l’equazione differenziale che regola, ad esempio, la tensione ai capi del
condensatore (discorso analogo potrebbe farsi per la corrente nell’induttore).
Applicando la LKT alla maglia, per t > 0, risulta:
- E + vR(t) + vL(t) + vC(t) = 0 .
(6.26)
Notate che, invece della funzione e(t) definita dalla (6.25), abbiamo messo già il
valore che questa tensione assume dopo la commutazione, cioè E. Inoltre, essendo
la corrente legata alla tensione sul condensatore dalla relazione
i(t) = C d vC(t) ,
dt
utilizzando le caratteristiche dei diversi bipoli, possiamo scrivere:
2
vR(t) = R i(t) = RC d v C(t) , vL(t) = L d i(t) = LC d v C(t) ,
dt
dt
dt2
(6.27)
in cui il simbolo ‘d2/dt2’ indica la derivata seconda, cioè la derivata della derivata
della funzione. Sostituendo le (6.27) nella (6.26), è
2
LC d vC(t) + RC d vC(t) + vC(t) = E ,
dt
dt2
che si può anche scrivere nella forma semplificata
d2 v C(t) + R d v C(t) + vC(t) = E .
L dt
LC
LC
dt2
(6.28)
60 - Circuiti elettrici in evoluzione dinamica
La soluzione della (6.28) richiede la conoscenza delle equazioni differenziali
lineari. Noi ci accontenteremo della risposta che Spice ci fornisce, mostrando che,
a seconda dei valori che assumono i diversi parametri del circuito, la soluzione
può essere più o meno oscillante. Esaminiamo questo ultimo punto ricorrendo
all’esempio:
R = 4 Ω , L = 1 mH , C = 1 mF , E = 2 V .
Esempio 5
*Circuito RLC
R0
1
2
4
L0
2
3
1m
IC=0
C0
3
0
1m
IC=0
VE
1
0
2
.TRAN
0.01m 20m
UIC
.PROBE
.END
Il risultato della simulazione è riportato in Figura 6.29. Notate subito due cose: la
scala dei tempi è in millisecondi e la tensione, dolcemente, si avvicina, al crescere
del tempo, al valore di regime di 2 V.
2
vC(t)
1.5
1
R≥2
0.5
L
C
t (ms)
0
0
5
10
15
20
Figura 6.29: andamento temporale della tensione sul condensatore.
61 - Circuiti elettrici in evoluzione dinamica
Come abbiamo indicato nella stessa figura, questo è un comportamento tipico ogni
qual volta si verifica la disuguaglianza
R≥2
L .
C
Come poi questo fatto si giustifichi esula dalla trattazione elementare dei transitori
che stiamo facendo. Ciò che a noi interessa è che riteniate che per certi valori dei
parametri della rete l’andamento della tensione può essere non oscillante.
Se invece scegliamo i valori
R = 1 Ω , L = 1 mH , C = 1 mF , E = 2 V ,
in cui abbiamo abbassato il valore della resistenza da 4 Ω a 1 Ω, lasciando
inalterati gli altri parametri, l’andamento della tensione può diventare oscillante,
come mostrato in Figura 6.30. Come suggerito da questa figura, l’andamento della
tensione può essere descritto da una funzione che, mentre oscilla attorno al valore
di 2 V, si smorza ‘su esso’ sempre più al crescere del tempo.
2.5
vC(t)
2
1.5
1
0.5
R<2
L
C
t (ms)
0
0
5
10
15
20
Figura 6.30: andamento temporale oscillante della tensione sul condensatore.
62 - Circuiti elettrici in evoluzione dinamica
Notate pure come, nell’intervallo 0 ÷ 5 ms, la tensione sul condensatore superi il
valore di 2 V, valore che assumerà quando il transitorio sarà concluso: proprio
queste oscillazioni che superano i valori attesi di regime creano quelle
sovratensioni (o sovracorrenti) che durante il transitorio, provocato dalla chiusura
o dalla apertura di un interruttore, possono danneggiare alcuni componenti del
circuito: ciò mostra l’importanza dello studio delle reti in regime dinamico.
Come per il caso precedente, ci interessa riteniate che, se
R<2
L ,
C
le grandezze del circuito tendono ai valori di regime oscillando.
Prima di concludere questo paragrafo, vi riportiamo due esempi per mostrarvi
come sia semplice trattare con Spice generatori che impongono tensioni descritte
da funzioni più complicate e come si simuli un circuito in cui sia presente un
doppio bipolo accoppiamento mutuo. Se siete interessati ad altri tipi di tensione
oppure a particolari bipoli o doppi bipoli, è il caso che consultiate dei manuali più
specialistici di Spice.
Consideriamo il circuito schizzato in Figura 6.31. Si tratta di un circuito R - C
forzato con una tensione a forma di ‘onda quadra’, un tipo di generatore molto
diffuso nella pratica tecnica e che, spesso, incontrerete nei vostri studi. Per t < 0,
la tensione è nulla; per t > 0, la tensione è rappresentata da una funzione che si
ripete periodicamente assumendo il valore ‘E’ nell’intervallo 0 < t < T, il valore
‘0’ nell’intervallo T < t < 2T, poi di nuovo ‘E’ nell’intervallo 2T < t < 3T, e così
via fino all’infinito.
1
+
R
−
2
+
+
e(t)
vC(t)
C
−
0
e(t)
−
E
0
T
2T 3T
i(t)
Figura 6.31: circuito RC con forzamento a onda quadra.
t
63 - Circuiti elettrici in evoluzione dinamica
Il listato che di qui a poco commenteremo mostra come il circuito si possa
simulare per mezzo di Spice, nel caso in cui il periodo di ripetizione dell’onda
quadra è cinque volte più grande della costante di tempo del circuito, cioè
T = 10 ms > RC = 2 ms, avendo scelto R = 2 kΩ e C = 1 µF.
La tensione sul condensatore, come mostrato in Figura 6.32, nel primo periodo si
carica, tendendo al valore E = 2.5 V che praticamente raggiunge; nel secondo
periodo si scarica ritornando a zero. Questa operazione di carica e scarica si ripete
ogni volta che la tensione del generatore commuta alla tensione ‘E’ e da questa a
‘0’.
vC(t)
3
2.5
2
1.5
1
0.5
t
0
0
0.02
0.04
0.06
0.08
0.1
Figura 6.32: carica e scarica periodica in un circuito RC.
Esempio 6
*Circuito RC con forzamento a onda quadra
R0
1
2
2k
C0
2
0
1u
VE
1
0
PULSE(0 2.5 0 1n 1n 10m 20m)
.TRAN
0.1m
100m
.PROBE
.END
L’istruzione nuova è quella che introduce il generatore di tensione
64 - Circuiti elettrici in evoluzione dinamica
VE
1
0
PULSE(0 2.5 0 1n 1n 10m 20m)
in cui, tenendo sottocchio la Figura 6.33, il primo valore dopo la parola chiave
‘PULSE’ è 0 e rappresenta il valore iniziale ‘V1’, 2.5 quello di picco ‘V2’, il terzo
valore impone che ‘TD = 0’; il terzo e quarto campo scelgono, rispettivamente, i
valori di ‘TR = 1n’, il tempo di salita, e di ‘TF = 1n’, il tempo di discesa. Infine,
‘PW = 10m’ rappresenta il tempo in cui la tensione si mantiene costante al valore
V2, e ‘T = 40m’ è il periodo totale.
e(t)
PW
V2
TR
V1
0
TD
TF
T
t
Figura 6.33: impulso periodico.
Notate (Figura 6.32) che mettendo 1n per il tempo di salita e 1n per quello di
discesa praticamente abbiamo un’onda quadra ‘perfetta’.
Nel caso riportato in Figura 6.34, per il quale T = 0.4 ms < RC = 2 ms, in ciascun
periodo la tensione sul condensatore non ‘ha il tempo’ per caricarsi o scaricarsi e,
pertanto, abbozza solo un debole salita verso ‘E’ oppure una incerta discesa verso
‘0’. Il risultato è che l’andamento temporale risulta completamente diverso da
quello mostrato in precedenza e, dopo un certo tempo, la tensione sembra
‘oscillare’, in maniera più o meno lineare, tra due valori intermedi compresi tra
‘0’ e ‘E’.
Esempio 7
*Circuito RC con generatore a onda quadra
R0
1
2
2k
C0
2
0
1u
VE
1
0
PULSE(0 2.5 0 1n 1n 0.4m 0.8m)
.TRAN
0.01m 10m
.PROBE
.END
65 - Circuiti elettrici in evoluzione dinamica
vC(t)
3
2.5
2
1.5
1
0.5
t
0
0
0.002
0.004
0.006
0.008
0.01
Figura 6.34: carica e scarica periodica in un circuito RC.
Non possiamo qui riportare tutti i tipi di forme d’onda che Spice consente di
trattare. Tuttavia, se avete ben compreso i semplici esempi riportati, avete tutti gli
elementi per risolvere qualsiasi transitorio vi si presenterà nella pratica
professionale.
L’ultimo esempio che vogliamo discutere è il transitorio legato alla chiusura di un
interruttore su doppio bipolo accoppiamento mutuo. Per i diversi parametri
scegliamo i seguenti valori:
E = 6 V , L 1 = 3 mH , L 2 = 0.2 H , M = 20 mH , R1 = 1 Ω , R2 = 200 Ω .
1
i1(t)
i2(t)
2
M
+
t=0
+
v1(t)
E
−
R1
0
−
+
L1
L2
v2(t)
R2
−
3
Figura 6.35: transitorio con un doppio bipolo accoppiamento mutuo (M > 0).
66 - Circuiti elettrici in evoluzione dinamica
Notate subito che, per ragioni legate al simulatore Spice, abbiamo collegato tra
loro i due bipoli scegliendo il nodo ‘3’ comune alle due maglie, quella di ingresso
e quella di uscita.
Calcoliamo per prima cosa il coefficiente di accoppiamento
k=
M = 0.816496581
L1 L2
.
Esempio 8
*Circuito con un mutuo induttore (M > 0)
VE
1
0
DC
6
L1
1
3
3m
IC=0
L2
2
3
0.2
IC=0
KC
L1
L2
0.8165
R1
3
0
1
R2
2
3
200
.TRAN
0.01m 20m
UIC
.PROBE
.END
Notate che, se non altrimenti specificato, gli elementi a memoria vengono supposti
scarichi in Spice e, pertanto, non è nemmeno necessario usare ‘UIC’ nel comando
‘.TRAN’.
L’andamento della corrente di uscita i2(t) è riportato in Figura 6.36. Si tratta, in
ultima analisi, di un processo di carica, diverso però da quelli esaminati. La scala
dei tempi è in millisecondi.
Un’ultima considerazione che ci aiuti a simulare il caso in cui il fattore di
accoppiamento è negativo.
67 - Circuiti elettrici in evoluzione dinamica
i2(t)
0
t (ms)
-0,05
-0,1
-0,15
0
5
10
15
20
Figura 6.36: andamento temporale della corrente i2(t).
Consideriamo il circuito mostrato in Figura 6.37 che è del tutto equivalente a
quello appena esaminato tranne che per la posizione dei ‘pallini’ che, come
certamente ricorderete, impongono una mutua induttanza negativa. Usiamo,
allora, i seguenti dati per la simulazione:
E = 6 V , L1 = 3 mH , L2 = 0.2 H , M = - 20 mH , R1 = 1 Ω , R2 = 200 Ω .
1
i1(t)
i2(t)
2
M
+
t=0
+
v1(t)
E
−
R1
0
−
+
L1
L2
v2(t)
R2
−
3
Figura 6.37: transitorio con un doppio bipolo accoppiamento mutuo (M < 0).
Il risultato è qualitativamente simile a quello illustrato in Figura 6.36 con la sola
differenza che, questa volta, la corrente cambia segno. Provate voi a verificare
68 - Circuiti elettrici in evoluzione dinamica
questo risultato usando il listato Spice che cambia come di seguito riportato, in cui
la sola differenza è rappresentata dalla riga
KC
L1
L2
-0.8165
in cui si cambia segno al coefficiente di accoppiamento.
Esempio 9
*Circuito con un mutuo induttore (M < 0)
VE
1
0
DC
6
L1
1
3
3m
IC=0
L2
2
3
0.2
IC=0
KC
L1
L2
-0.8165
R1
3
0
1
R2
2
3
200
.TRAN
0.01m 20m
UIC
.PROBE
.END
Quanto detto può bastare sui transitori: è tempo, ora, di passare all’esame del
regime sinusoidale.
69 - Circuiti elettrici in evoluzione dinamica
Appendice: transitori in circuiti con generatori controllati
Consideriamo la rete mostrata in Figura A.1: un condensatore carico alla tensione
v(0) = v0, si scarica su due resistori posti in parallelo R1 e R2 in presenza di un
generatore di tensione controllato in corrente.
α i1(t)
1
+
v(t)
−
+
− 2
t=0
C
i2(t)
R1
i(t)
R2
i1(t)
0
Figura A.1: transitorio in un circuito con generatore controllato.
Nella rete assegnata è presente, dunque, un generatore di tensione controllato in
corrente (α ha le dimensioni di una resistenza) e il condensatore è stato caricato
(non ci interessa come) ad una valore di tensione non nulla.
Se provate a formulare il problema delle determinazione della tensione v(t),
troverete che essa soddisfa l’equazione differenziale
d v(t) + v(t) = 0 ,
τ
dt
in cui abbiamo introdotto la costante di tempo
τ = CR2 R1 - α .
R1 + R2
Basta una rapida occhiata a questa costante di tempo per convincersi che essa è
positiva per R1 > α, ed è negativa per R1 < α. Il fatto che la costante di tempo
possa diventare negativa comporta, come vedremo in dettaglio tra un momento,
che la corrente in esame, al trascorrere del tempo, aumenti. Tutti i transitori
finora sviluppati ci hanno abituato a dinamiche convergenti (o a zero, o a un certo
valore) e dinamiche ‘esplosive’ ci spaventano un poco. La realtà è che nessun
circuito può produrre indefinitamente tali dinamiche dato che, prima o poi,
interverranno dei fenomeni di saturazione, tipici di ciascun componente: quando le
70 - Circuiti elettrici in evoluzione dinamica
tensioni e le correnti diventano troppo elevate, il funzionamento dei componenti
non è più lineare e diventano importanti effetti non lineari che arrestano la
crescita esponenziale.
La soluzione del problema differenziale (la cui dimostrazione esula dagli scopi
della nostra trattazione) vale
per t ≥ 0 .
v(t) = v0 e-t/τ
e rappresenta una funzione esponenziale smorzata se τ è positivo, un esponenziale
‘che esplode’ per valori negativi di τ. In altri termini
se R1 > α, allora τ > 0 e la dinamica è del tipo smorzato;
se R1 < α, allora τ < 0 e la dinamica è del tipo esplodente.
Più che delle formule ci preme mostrarvi la Figura A.2 in cui alcune dinamiche
della tensione v(t) per valori, positivi e negativi, della costante di tempo vengono
presentate.
3
v(t)
v0 2.5
τ=-2
2
1.5
1
0.5
τ = 0.1
τ = 0.2
τ=1
t
0
-1
-0.5
0
0.5
1
1.5
2
Figura A.2: dinamiche in un circuito con generatore controllato.
Osservate dalla Figura A.2 come, per t < 0, la tensione si mantenga costante al
valore v0 e che, non appena l’interruttore collega il condensatore al resto del
71 - Circuiti elettrici in evoluzione dinamica
circuito, comincia il transitorio che o fa evolvere rapidamente la tensione verso
valori molto elevati, oppure, dopo qualche costante di tempo, rende praticamente
nulla la tensione.
Il fatto che la tensione possa crescere col passare del tempo non deve turbarci più
di tanto: se la tensione cresce, vuol dire che nella rete deve essere presente una
sorgente di energia da qualche parte. Questa sorgente è certamente il generatore
controllato dato che, come certamente ricorderete, i generatori pilotati sono
dispositivi attivi.
Provate a convincervi fino in fondo delle dinamiche fornitevi usando Spice per i
due seguenti casi:
a) v0 = 10 V, R1 = R2 = 1 Ω, C = 4 mF, α = 0.5 Ω;
b) v0 = 10 V, R1 = R2 = 1 Ω, C = 4 mF, α = 1.5 Ω.
Per il caso a) troverete una costante di tempo positiva e pari a τ = 1 ms; per il caso
b) la costante di tempo è negativa e vale τ = - 1 ms.
Cosa dobbiamo imparare dall’esempio appena discusso?
Abbiamo imparato che, essendo i generatori controllati doppi bipoli attivi, le
dinamiche che si instaurano in un circuito in cui siano presenti generatori di
questo tipo possono essere non convergenti col passare del tempo.
72 - Circuiti elettrici in evoluzione dinamica
Capitolo 7
Reti in regime sinusoidale
7.1 Introduzione
7.1.1 La generica funzione sinusoidale del tempo
7.1.2 C’era una volta ...
7.2 Una indispensabile parentesi matematica: i numeri complessi
7.2.1 I numeri immaginari
7.2.2 I numeri complessi: forma algebrica e forma polare
7.2.3 Le quattro operazioni fra i numeri complessi
7.3 I ‘trucchi’ di Steinmetz e Kennelly
7.4 La risoluzione di una rete in regime sinusoidale con il ‘metodo dei
fasori’
7.5 Impedenza complessa
7.6 Il circuito RLC
7.7 Strumenti in corrente alternata
7.8 Potenze in regime sinusoidale
7.9 Esempi
7.10 Doppi bipoli in regime sinusoidale
7.11 Un transitorio con forzamento sinusoidale
73 - Circuiti elettrici in evoluzione dinamica
7.12 Galileo Ferraris
Appendice: introduzione alla Trigonometria
A.1
A.2
A.3
A.4
La misura degli angoli
Le principali funzioni trigonometriche
L’identità pitagorica
Qualche utile relazione
Sommario
Studieremo in questo capitolo il regime sinusoidale, detto in gergo
‘corrente alternata’, caratterizzato da tensioni e correnti che variano
sinusoidalmente nel tempo. Dopo aver introdotto i numeri complessi,
saremo in grado di concludere che, per studiare il comportamento di
una rete operante in corrente alternata, possono essere adoperati tutti i
metodi che abbiamo imparato per le reti in regime stazionario e ciò ... ci
faciliterà non poco la vita.
74 - Circuiti elettrici in evoluzione dinamica
7.1 Introduzione
Questo capitolo è dedicato interamente allo studio dei circuiti in regime
sinusoidale. L’importanza che in tal modo attribuiamo a questo argomento non
deve sorprendere, giacché la rete con la quale l’energia elettrica viene distribuita
agli utenti (a partire dalle nostre stesse case), non soltanto in Europa, ma
nell’intero mondo industrializzato, funziona appunto in regime sinusoidale. Si
comprende, quindi, l’importanza di queste condizioni di funzionamento.
È essenziale, perciò, che acquisiate la massima familiarità con la risoluzione dei
circuiti in regime sinusoidale: e che sappiate farlo correttamente e rapidamente,
tanto aiutandovi con i mezzi di calcolo disponibili al computer (Spice), quanto ‘a
mano’.
Prima di entrare nel vivo dell’argomento, che sarà affrontato nei paragrafi
seguenti (dal 7.2 in avanti), conviene profittare di questa premessa per spiegare
innanzitutto due cose essenziali:
• in cosa consista esattamente il regime sinusoidale;
• come mai esso si sia affermato così diffusamente, al posto del più semplice
(almeno in apparenza) regime stazionario.
A questo scopo, dedicheremo innanzitutto un lungo paragrafo per discutere a
fondo cosa sia una funzione sinusoidale del tempo, sia dal punto di vista
matematico che fisico, poiché queste funzioni costituiscono il fondamento
dell’intera teoria dei circuiti in regime sinusoidale. Non sorprendetevi, quindi, se
insisteremo a lungo su queste cose: sarà tutta fatica risparmiata ... nel seguito.
Un’ultima annotazione prima di iniziare. In diversi punti di questo capitolo
useremo delle relazioni tra funzioni trigonometriche; ogni volta cercheremo, per
mezzo di grafici, di farvene intuire e di farvene comprendere appieno il
significato. Tuttavia, per chi volesse dimostrarle rigorosamente, abbiamo
preparato un’appendice, posta alla fine del libro, in cui vi sono le idee
fondamentali della trigonometria piana e, con esse, alcune relazioni che vi
torneranno utili nel corso dei vostri studi.
7.1.1 La generica funzione sinusoidale del tempo
Per chiarire la prima questione, facciamo un passo indietro, e cominciamo col
ricordare che, già nel paragrafo 1.4, avevamo introdotto le semplici funzioni della
variabile t che avevamo indicato con i simboli
75 - Circuiti elettrici in evoluzione dinamica
SIN(t) ,
COS(t) ,
TAN(t) ,
oppure anche
sen(t) ,
cos(t) ,
tan(t) ,
e di cui avevamo riportato i grafici, nonché i modi per calcolarle per ciascun
valore di t, sia facendo uso di una comunissima ‘macchinetta calcolatrice’, sia ‘a
mano’. Ora, per chiarire bene in cosa consista il funzionamento di un circuito in
regime sinusoidale conviene introdurre una funzione un po’ più generale, sia di
sen(t) che di cos(t), che va sotto il nome generico di funzione sinusoidale, e che è
rappresentata dalla seguente espressione:
a(t) = AM sen(ωt + α) ,
(7.1)
nella quale
• AM è un numero sempre positivo, che prende il nome di ampiezza della funzione
sinusoidale;
• ω è un altro numero, anch’esso sempre positivo, che va sotto il nome di
pulsazione della suddetta funzione;
• α è un terzo numero, questa volta di segno qualsiasi, che prende il nome di fase
della funzione considerata.
Per fissare subito le idee, riportiamo qualche semplice esempio di funzione
sinusoidale:
a1(t) = 100 sen(200t + 1.5) ,
a2(t) = 300 sen(314t - π/4) ,
a3(t) = 10 2 sen(1000t + π/3) ,
e così via. Le ampiezze di a1(t), a2(t) e a3(t) valgono, rispettivamente, 100, 300 e
10 2 ; le pulsazioni delle tre funzioni sono rispettivamente 100, 314 e 1000,
mentre, infine, le rispettive fasi sono 1.5, - π/4 e + π/3.
L’intera quantità contenuta all’interno della parentesi nella (7.1), e cioè
l’espressione
76 - Circuiti elettrici in evoluzione dinamica
β = ωt + α
(7.2)
prende il nome di argomento della funzione sinusoidale, e possiamo quindi
scrivere:
a(t) = AM sen(ωt + α) = AM sen β .
(7.3)
Come vedremo subito, già la semplice definizione che abbiamo appena dato di una
generica funzione sinusoidale della variabile tempo richiederà parecchie
precisazioni e qualche approfondimento, per essere compresa fino in fondo.
Cominciamo quindi col chiarire subito come si calcola il valore di una funzione
del tipo (7.1) per un qualsiasi, assegnato, valore della variabile indipendente t. La
cosa è ovvia: si comincia col calcolare, per il valore assegnato di t, il valore
dell’argomento β, dato dalla (7.2). Ad esempio, con riferimento alla funzione
a2(t) = 300 sen(314t - π/4) ,
volendo calcolare il valore, diciamo, per t = 12.3, abbiamo, subito:
β = 314 ⋅ 12.3 - π = 3861.41460184
4
.
Dopo di ciò, basta pigiare sulla calcolatrice il tastino ‘SIN’, per ottenere subito:
sen β = - 0.386866046
.
Infine basta moltiplicare questo risultato per l’ampiezza 300:
a2(12.3) = 300 sen(314 ⋅ 12.3 - π/4) = 300 ⋅ (- 0.386866
) = - 116.0598
.
A questo punto, abbiamo imparato a calcolare il valore di una qualsiasi generica
funzione sinusoidale del tipo (7.1) per ogni valore della variabile indipendente t.
Già questo ci consente di ricavare alcune importanti informazioni sulle funzioni
sinusoidali, nonché sul significato dei tre numeri AM, ω e α che la caratterizzano.
Cominciamo coll’osservare subito che ogni funzione sinusoidale è periodica.
Questo vuol dire, in parole povere, che, se conosciamo i valori in un determinato
intervallo di tempo (che prende il nome di periodo della funzione), i valori in
ogni altro istante sono noti a priori, perché non fanno altro che ripetere quelli già
77 - Circuiti elettrici in evoluzione dinamica
assunti nel periodo. Chiariamo la cosa con un esempio, come al solito, e
consideriamo la funzione:
a(t) = 100 sen(50t + π/4) .
Calcoliamo il valore di a(t) per t, ad esempio, pari a 3:
a(3) = 100 sen(50 ⋅ 3 + π/4) = - 1.105
.
Ricaviamolo, ora, per t = 3 + 0.125664:
a(3.125664) = 100 sen(50 ⋅ 3.125664 + π/4) = - 1.105
,
e, ancora, per t = 3 ± 2 ⋅ 0.125664:
a(3 ± 2 ⋅ 0.125664) = - 1.105
.
Ci accorgiamo così che il valore della funzione a(t), calcolato per t = 3 coincide
esattamente col valore calcolato per t = 3 ± n ⋅ 0.125664, essendo n un numero
intero qualsiasi (1, 2,
, 100,
).
La stessa cosa si ripete per qualsiasi altro valore della variabile indipendente t;
accade, cioè, che ad esempio:
a(23.5) = a(23.5 ± n ⋅ 0.125664) ,
e così via. Si intuisce allora che, per la funzione a(t) assegnata, il numero fisso
0.125664 svolge il ruolo di quello che avevamo chiamato periodo della funzione.
Sorge spontanea allora la domanda: come abbiamo fatto a saperlo? E, inoltre,
come si fa a calcolare il periodo per un’altra, qualsiasi funzione sinusoidale?
La risposta è semplicissima: data una qualsiasi funzione sinusoidale scritta nella
forma (7.1), il periodo, che indicheremo con la lettera maiuscola T, è dato dalla
semplicissima formula:
T = 2π ,
ω
(7.4)
nella quale ω è la pulsazione della funzione sinusoidale considerata. In altre
parole, conoscere ω è equivalente a conoscere T; e viceversa, se si conosce T ma
non ω, quest’ultima si ottiene subito dalla stessa (7.4):
78 - Circuiti elettrici in evoluzione dinamica
ω = 2π .
T
(7.5)
Il periodo T è misurato in secondi, ovviamente, quando la variabile t è il tempo.
La pulsazione ω è misurata invece in ‘radianti/secondi’.
C’è una terza grandezza, anch’essa legata a ω e T, che è molto usata nella pratica,
ed è la cosiddetta frequenza, di solito indicata con la lettera f, e che corrisponde
semplicemente all’inverso del periodo:
f=1 = ω .
T 2π
(7.6)
La frequenza si misura in ‘hertz’ (Hz) e suoi multipli (kHz, MHz, GHz, che si
leggono rispettivamente chilohertz, megahertz, gigahertz; a volte, si usano, in
gergo, anche termini come chilocicli, megacicli, e così via).
In conclusione, conoscere uno qualsiasi dei tre numeri ω, T, f consente di
calcolare subito, mediante le (7.4), (7.5) e (7.6), gli altri due.
Per chiarire ulteriormente il significato di questi numeri, facciamo riferimento al
grafico tipico di una funzione sinusoidale, riportato in Figura 7.1.
Come si vede, esso è ‘periodico’ anche dal punto di vista ‘visivo’: nel senso che si
ripete continuamente lungo l’asse orizzontale.
a(t) = AM sen(ωt + α)
AM
T
t
0
T
- AM
Figura 7.1: generica funzione sinusoidale.
79 - Circuiti elettrici in evoluzione dinamica
Il valore del periodo T può essere misurato, su un grafico di questo tipo, con
estrema facilità: basta prendere una ‘oscillazione completa’ della funzione, come
mostrato in figura e misurare l’intervallo di tempo corrispondente (indicato con T
e i suoi estremi, in due posizioni diverse del grafico).
La frequenza f corrisponde, in questo modo, al numero di periodi (e, quindi, di
oscillazioni complete) contenuti in un secondo.
La pulsazione ω, infine, altro non è se non la frequenza moltiplicata per il numero
‘fisso’ 2π, come prescritto dalla relazione (7.6).
Data l’importanza fondamentale di questi concetti nello studio dei circuiti (e non
soltanto in regime sinusoidale), non deve sorprendere se insistiamo ancora a
metterne in evidenza i diversi significati.
A questo scopo, facciamo ora riferimento a un esempio ‘meccanico’ certamente
familiare a tutti: quello di un pendolo (fatto semplicemente di un filo appeso al
soffitto e terminante con una pallina di acciaio o con qualunque altro oggetto,
piccolo ma abbastanza pesante).
θ
Figura 7.2: esempio di pendolo meccanico.
Immaginiamo di mettere in moto questo pendolo e di lasciarlo poi oscillare da
solo per un certo tempo. Non sarebbe difficile mostrare che, specie all’inizio, il
moto del pendolo può essere descritto con eccellente approssimazione proprio da
una funzione sinusoidale del tipo (7.1), nella quale il valore della funzione
rappresenta, in ogni istante, l’angolo θ che il pendolo fa con la verticale (vedi la
Figura 7.2). È chiaro che la durata T del periodo è quella che corrisponde a una
oscillazione completa del pendolo (e cioè a una andata e ritorno completi della
pallina), e che, analogamente, la frequenza con cui il pendolo oscilla corrisponde
al numero di oscillazioni complete compiute dal pendolo in un solo secondo. Con
80 - Circuiti elettrici in evoluzione dinamica
ciò, speriamo di aver chiarito a sufficienza il significato fisico di T, e quindi anche
di f e ω.
Ricordando che la generica funzione sinusoidale (7.1) è caratterizzata dai tre
numeri AM, ω, α, resta ora da chiarire il significato di ΑM e α per completare il
quadro.
Per quel che riguarda AM, la cosa è semplicissima, poiché basta ricordare che la
funzione sen(ωt + α) ha come valore massimo + 1 e come valore minimo - 1, per
concludere che AM rappresenta il valore massimo assunto dalla funzione (come
indicato nella Figura 7.1), e che, analogamente, il suo opposto, - AM, ne
rappresenta il minimo.
È importante osservare qui che, per motivi che saranno chiariti più avanti, è
molto diffuso scrivere l’ampiezza AM nella seguente forma:
AM = A 2 ,
(7.7)
dove la quantità A prende il nome di valore efficace della a(t). Nell’esempio del
pendolo, AM rappresenta l’angolo formato dal filo con la verticale, quando il
pendolo, raggiunto uno degli estremi della sua ‘corsa’, si trova proprio nel
momento in cui sta per ritornare indietro.
Più delicato è chiarire, invece, il significato del terzo numero che caratterizza la
funzione sinusoidale, e cioè la fase α. Data, però, l’importanza assunta da questo
parametro nello studio del regime sinusoidale, ci soffermeremo anche su esso, col
dovuto dettaglio per metterne in piena luce i diversi aspetti.
Cominciamo coll’osservare che se, nell’espressione (7.1) di una generica funzione
sinusoidale a(t), calcoliamo il valore all’istante t = 0, otteniamo:
a(0) = AM sen(ω ⋅ 0 + α) = AM sen α .
(7.8)
Come si vede, quindi, il valore di α determina (indirettamente, e cioè attraverso
l’espressione AM sen α) il valore che la funzione sinusoidale assume proprio
all’istante t = 0. Così, ad esempio, se la fase α è zero, si ha: a(0) = 0, e il grafico
della funzione a(t), riportato in Figura 7.3, passa per l’origine degli assi.
81 - Circuiti elettrici in evoluzione dinamica
a(t) = AM sen(ωt)
α=0
AM
0
t
- AM
Figura 7.3: funzione sinusoidale con α = 0.
Se, invece, la fase α è, ad esempio, pari a π/2, si ha: a(0) = AM sen(π/2) = AM, e il
grafico corrispondente è del tipo riportato in Figura 7.4, in cui si vede che a(t)
raggiunge addirittura il suo valore massimo AM proprio nell’istante t = 0.
a(t) = AM sen(ωt + π/2)
α = π/2
AM
0
- AM
Figura 7.4: funzione sinusoidale con α = π/2.
t
82 - Circuiti elettrici in evoluzione dinamica
Più in generale, non sarebbe difficile far vedere che α può essere facilmente
misurato sul grafico della generica funzione a(t), nel modo indicato in Figura 7.5:
si considera il primo punto (indicato con P in Figura 7.5) a sinistra dell’origine
nel quale il grafico assume valore nullo, e cioè ‘taglia’ l’asse orizzontale, mentre
cresce; il punto P', quindi, non va bene, perché il grafico ‘taglia’, sì, l’asse
orizzontale, ma mentre decresce.
Una volta trovato il punto P, basta misurare la durata P0 sull’asse t, e
moltiplicarla per la pulsazione ω. Si ha, cioè:
α = ω P0 ,
(7.9)
avendo indicato con P0 la durata (misurata ovviamente in secondi, del segmento
P0).
A questo punto, siamo in condizioni di chiarire la differenza sostanziale che passa
tra un numero come ω e uno come α. Mentre, infatti, per una data funzione
sinusoidale, ω è un numero assegnato, che noi non possiamo modificare in alcun
modo, α dipende sostanzialmente da noi, poiché dipende dall’istante in cui noi
facciamo ‘scattare’ il cronometro. Non dimentichiamo, infatti, che l’istante t = 0
non esiste di per sé: esso indica semplicemente l’istante in cui noi decidiamo di far
partire la lancetta del nostro orologio.
a(t) = AM sen(ωt + α)
AM
P'
P
0
t
- AM
Figura 7.5: misura di α per una generica funzione sinusoidale.
83 - Circuiti elettrici in evoluzione dinamica
Ora, tornando, per chiarire ulteriormente la cosa, all’esempio del pendolo, è facile
capire che, mentre il pendolo sta oscillando per conto suo (e cioè liberamente,
senza alcun intervento da parte nostra), noi possiamo decidere di far partire in
qualsiasi momento il nostro orologio. Con ciò, la fase della funzione sinusoidale
che descrive il moto del pendolo rimane praticamente decisa da noi stessi, nel
momento in cui azioniamo il cronometro.
In conclusione, mentre la pulsazione ω (e quindi anche la frequenza f, e il periodo
T) di una data funzione sinusoidale è univocamente fissata, la fase α è arbitraria,
poiché dipende, come già detto, dall’istante in cui facciamo partire il nostro
orologio.
Ciò detto, va però chiarita subito un’altra cosa, altrettanto importante, che
riguarda le differenze di fase fra funzioni sinusoidali diverse. Se, infatti,
consideriamo le due seguenti funzioni sinusoidali
a(t) = AM sen(ωt + α) , b(t) = BM sen(ωt + β) ,
(7.10)
che hanno la stessa pulsazione ω, è chiaro, in base a ciò che abbiamo detto prima,
che, facendo scattare il nostro cronometro in un determinato istante (scelto
arbitrariamente da noi), possiamo decidere il valore della fase di una delle due
funzioni, ma non di tutte e due insieme. Per chiarire ulteriormente, se di pendoli
che oscillano ciascuno per conto proprio ce ne sono due (e non uno soltanto),
possiamo fare scattare l’orologio nell’istante in cui, ad esempio, il primo pendolo
sta passando proprio per la verticale, ma, in quello stesso istante l’altro pendolo si
troverà in generale in una posizione diversa. Ne dobbiamo concludere quindi che,
‘giocando sull’istante t = 0‘, possiamo decidere ad arbitrio il valore di α, oppure
quello di β, ma non il valore della differenza
ϕ=α-β,
(7.11)
che prende il nome di ‘sfasamento di b(t) rispetto ad a(t)’, ed è indipendente dal
momento in cui azioniamo il cronometro.
La stessa cosa vale ovviamente quando, invece che due funzioni sinusoidali di
uguale pulsazione, ne consideriamo tante quante ne vogliamo:
84 - Circuiti elettrici in evoluzione dinamica
a(t) = AM sen(ωt + α) ,
b(t) = BM sen(ωt + β) ,
c(t) = CM sen(ωt + γ) ,
(7.12)
s(t) = S M sen(ωt + σ) .
‘Giocando’ sull’istante t = 0, possiamo fissare ad arbitrio il valore di una qualsiasi
delle fasi α, β, γ,
, ma di una soltanto. Restano, invece, determinati in modo
fisso tutti gli sfasamenti (e cioè le differenze di fase) fra le diverse funzioni:
ϕ1 = α - β , ϕ2 = α - γ ,
.
(7.13)
In gergo, quando lo sfasamento ϕ dato dalla relazione (7.11) è positivo, si dice che
a(t) è in ‘anticipo di ϕ‘ sulla b(t); oppure, il che è equivalente, che b(t) è ‘in
ritardo di ϕ‘ sulla a(t). Ad esempio, per
a(t) = AM sen(ωt + π/4) , b(t) = BM sen(ωt + π/5) ,
lo sfasamento ϕ è
ϕ = π - π = π = 9° ,
4 5 20
e a(t) è in anticipo di π/20 su b(t). Analogamente, posto
a(t) = AM sen(ωt + π/2) , b(t) = BM sen(ωt - π/3) ,
risulta che
ϕ = π - - π = 5π = 150° ,
2
3
6
e a(t) è in anticipo di 5π/6 su b(t).
Per abituarvi, poi, al gergo degli elettrotecnici, ricordate che quando
ϕ = π/2 = 90°, si dice che a(t) è in quadratura d’anticipo (o di ritardo, se
ϕ = - π/2 = - 90°) su b(t), e che, se ϕ = π = 180° , a(t) e b(t) sono in opposizione.
85 - Circuiti elettrici in evoluzione dinamica
Al termine di questa lunga parentesi dedicata a chiarire bene cosa sia una generica
funzione sinusoidale del tempo, e a metterne in luce i diversi aspetti e i diversi
parametri, è ora il caso di applicare quello che abbiamo detto al caso pratico che ci
interessa più da vicino, e che ciascuno di noi ha sottocchio tutti i giorni, in casa e
sui posti di lavoro: quello delle cosiddette ‘prese’ (alle quali accennavamo già
all’inizio di questo libro). Siamo ora, finalmente, nelle condizioni di spiegare in
dettaglio cosa rappresenti una ‘presa’ dal punto di vista circuitale.
Con riferimento a una tipica presa a tre fori, del tipo rappresentato in Figura 7.6
(come se ne trovano normalmente nelle nostre case), diciamo subito che,
malauguratamente (per motivi che saranno chiariti nel libro dedicato agli impianti
elettrici), molto spesso, per non dire quasi sempre, il foro centrale della presa è
inutile, e può essere quindi ignorato, perché elettricamente inattivo.
Figura 7.6: presa a tre fori.
Quando non è così, esso è invece molto importante ai fini della sicurezza degli
utenti!
Per semplicità, facciamo riferimento quindi a una presa a due soli fori (Figura
7.7), come, pure, se ne trovano ancora tante nelle nostre case.
+
e(t)
−
Figura 7.7: presa a due fori e circuito equivalente.
86 - Circuiti elettrici in evoluzione dinamica
Bene: da un punto di vista circuitale, possiamo pensare che una presa di questo
genere sia equivalente, con buona approssimazione (pari a ± 5%) a un generatore
indipendente di tensione, la cui d.d.p. sia la seguente funzione sinusoidale del
tempo:
e(t) = 220 2 sen(2π 50 t + α) ≅ 220 2 sen(314 t + α) .
(7.14)
Si vede così che:
• è più corretto considerarla come ‘presa di tensione’, che non ‘di corrente’ (non
trattandosi di un generatore di corrente, bensì - semmai - di tensione);
• che la frequenza di questa tensione è 50 Hz (e cioè 50 oscillazioni complete in un
secondo); il periodo è quindi di 20 ms (millisecondi), mentre la pulsazione è circa
314 radianti/secondo;
• che il valore efficace di questa d.d.p. è pari a 220 V, mentre l’ampiezza (e cioè il
valore massimo) è circa 311 V.
Siamo ora giunti al punto di poter dare piena e completa risposta alla prima
domanda che ci eravamo posti nella premessa, e cioè cosa debba intendersi
esattamente per regime sinusoidale quando ciascuna delle grandezze fondamentali
della rete, e cioè ciascuna corrente e ciascuna tensione varia nel tempo come una
funzione sinusoidale la cui pulsazione sia assegnata una volta per tutte nell’intera
rete. Così, in Italia (e nel resto della Comunità europea), il regime sinusoidale, per
i comuni impianti domestici e industriali, ha la frequenza di 50 Hz. Ciò vuol dire lo ripetiamo - che ogni corrente e ogni tensione, in Italia, in Francia, e così via,
variano nel tempo sinusoidalmente alla frequenza di 50 Hz (negli USA, invece, il
regime sinusoidale ha una frequenza di 60 Hz).
Si osservi, infine, che, nel definire il regime sinusoidale di una rete, si è fatta
attenzione a specificare che le grandezze che variano sinusoidalmente sono soltanto
quelle fondamentali, e cioè le correnti e le tensioni: non così per le grandezze
derivate. Vedremo, infatti, che, in particolare, le potenze elettriche assorbite (ed
erogate) dai diversi componenti non variano, in generale, con legge sinusoidale,
bensì in modi diversi (che a suo tempo specificheremo caso per caso).
7.1.2 C’era una volta …
Come anticipato al termine della premessa a questo capitolo, vogliamo ora fare
almeno un cenno alle ragioni e alle circostanze principali che, in passato, hanno
87 - Circuiti elettrici in evoluzione dinamica
portato a fare prevalere il regime sinusoidale su quello stazionario nel
funzionamento delle reti di distribuzioni dell’energia elettrica.
Inquadriamo innanzitutto l’epoca: siamo negli ultimi decenni dell’Ottocento, e
dobbiamo immaginare che soltanto da pochi anni i fenomeni fondamentali
dell’Elettromagnetismo sono stati scoperti, insieme con le grandi leggi della fisica
che li governano, (ad opera di scienziati della levatura di Volta, Oersted, Faraday,
Maxwell e altri). Le prime applicazioni di questa ‘nuova’ branca della Fisica
cominciano a diffondersi: basta pensare al telegrafo, ai primi generatori
elettromeccanici (le cosiddette ‘dinamo’ di Pacinotti e di Siemens), ai primi motori
elettrici, alle prime lampade per l’illuminazione, e così via.
C’è da dire che questi primi dispositivi funzionano in ‘corrente continua’ (e cioè in
regime stazionario), e che soltanto ora cominciano a fare la loro comparsa i primi
generatori elettromeccanici tempo varianti che presentano ai loro morsetti una
d.d.p. variabile sinusoidalmente nel tempo (sono i cosiddetti alternatori), e che specie all’inizio - non sembrano offrire opportunità migliori rispetto a quelle
offerte dalle ‘dinamo’, né dal punto di vista tecnico, né economico.
Poi, all’improvviso - siamo intorno agli anni ’80 dell’Ottocento - compare un
dispositivo nuovo, il cosiddetto Generatore secondario, a opera di due ‘praticoni’
(uno, francese, di nome Gaulard, e l’altro, inglese, Gibbs), che permette di fare,
operando in ‘corrente alternata’ (e cioè in regime sinusoidale), una cosa molto
importante che in ‘continua’ non può essere fatta in alcun modo. Si tratta, in
ultima analisi, di riuscire a cambiare a piacimento (almeno entro certi limiti) il
valore della tensione prodotta ai morsetti di un generatore, sia innalzandola che
abbassandola. Di qui, il nome di generatore secondario, poiché il dispositivo
opera, dal punto di vista logico, come se fosse un secondo generatore funzionante
‘in cascata’ a un generatore ‘primario’.
Il dispositivo offre certamente opportunità - specie in termini di flessibilità di
funzionamento - che sono di grande interesse tecnico-economico, anche se occorre riconoscerlo apertamente - neppure gli stessi inventori ne avevano capito
fino in fondo il funzionamento. Al punto che, specie all’inizio, si ‘sospettava’ che il
generatore secondario fosse in grado di erogare una potenza elettrica addirittura
maggiore della potenza elettrica assorbita! A chiarire questo aspetto fondamentale
della questione, rimettendo le cose al loro giusto posto, nel contesto del teorema
generale di conservazione delle potenze elettriche, ci pensò il nostro grande
Galileo Ferraris, professore di Elettrotecnica a Torino, che, in un lavoro
scientifico esemplare sia sotto il profilo della ‘pulizia’ logica che sotto quello della
abilità e precisione sperimentale, spiegò in maniera del tutto soddisfacente il
funzionamento del nuovo dispositivo, e ne indicò anche in maniera limpida e
originale i criteri-guida per progettarlo e costruirlo ‘a regola d’arte’.
88 - Circuiti elettrici in evoluzione dinamica
Le enormi possibilità offerte dal nuovo dispositivo (che ormai è indicato come
trasformatore, e non più generatore secondario) si delineano rapidamente: specie
nei confronti della possibilità di riuscire a innalzare la tensione delle linee di
distribuzione dell’energia elettrica, in modo da poterne ridurre i costi di
realizzazione.
Nasce, così, di qua e di là dell’Atlantico, una grande disputa fra le aziende che,
all’epoca, dominavano l’allora nascente mercato elettrico, come la Westhinghouse,
la General Electric, la Siemens e poche altre, circa l’opportunità di prevedere per
il futuro lo sviluppo dell’energia elettrica nel quadro di una generale distribuzione
della stessa in regime stazionario, oppure in regime sinusoidale. A favore
dell’alternata, oltre alla possibilità di impiego del trasformatore, ci sono anche
altre opportunità alle quali faremo cenno fra un attimo. Per contro, a vantaggio
della ‘continua’ non va sottovalutata la facilità di risoluzione delle reti in regime
stazionario che, in ultima analisi, si traduce in semplicità di progettazione e quindi
anche di realizzazione. Non dimentichiamo, infatti, che la risoluzione di una rete
in condizioni variabili nel tempo richiede quegli strumenti matematici, le
equazioni differenziali di cui si è parlato al temine del Capitolo 6, e che, all’epoca
di cui stiamo parlando, non potevano essere considerate patrimonio comune dei
tecnici che progettavano e realizzavano apparati elettrici.
La disputa ebbe toni accesi, e durò più di un decennio, con alti e bassi da una parte
e dall’altra.
Come sempre accade in casi simili, alla fine la scelta non fu presa in un solo, ben
preciso momento, né per una sola e precisa ragione: avvenne, invece,
gradualmente, e per l’effetto concomitante di molte cause.
Molto influirono certamente due fatti, che videro la luce grosso modo
contemporaneamente:
a) l’intuizione avuta dal giovanissimo ingegnere tedesco Brown circa la possibilità
di distribuire l’energia elettrica per mezzo di linee trifase e non soltanto monofase
(di qui a poco, chiariremo bene il senso di questa intuizione);
b) l’invenzione da parte ancora del nostro Galileo Ferraris e di un ‘geniaccio’
euro-americano, Nikola Tesla, del cosiddetto motore asincrono, che letteralmente
rivoluzionò le opportunità di applicazione dell’energia elettrica in campo
meccanico.
La conclusione fu, per farla breve, che già ai primi del Novecento, il regime
sinusoidale l’aveva avuta vinta, sia al di qua che al di là dell’Atlantico, e che, sia
pure a malincuore, occorreva adattarsi ai problemi che nascevano dalla difficoltà
89 - Circuiti elettrici in evoluzione dinamica
di risoluzione delle reti in queste condizioni di funzionamento variabile nel tempo.
Ma questa è … un’altra storia, di cui parleremo nei paragrafi che seguono.
7.2 Una indispensabile parentesi matematica: i numeri complessi
In questo paragrafo introdurremo prima i numeri immaginari e, poi, i numeri
complessi, che rappresentano uno strumento capace di rendere più semplice lo
studio delle reti in regime sinusoidale.
7.2.1 I numeri immaginari
La questione di come riuscire a risolvere i circuiti in regime sinusoidale in
maniera rapida ed efficace, evitando di affrontare le complesse equazioni
differenziali mediante le quali si esprimono le leggi della teoria dei circuiti in
questi casi, impegnò non poco gli elettrotecnici degli ultimi decenni dell’Ottocento.
Alla fine, la soluzione fu trovata da un ingegnere cecoslovacco emigrato negli
USA, Charles Proteus Steinmetz (che, a buon diritto, può essere considerato uno
dei ‘padri fondatori’ dell’Elettrotecnica mondiale: si pensi che, ogni anno, egli
stabiliva da sé il compenso che riteneva giusto percepire dalla Compagnia che egli
stesso stava contribuendo tecnicamente a ‘lanciare’, e cioè la famosa General
Electric) e da un americano, Kennelly, che, a sua volta, contribuì in maniera
determinante al definitivo trionfo dei nuovi metodi.
Come spesso accade, si vide poi che il metodo escogitato da questi due notevoli
personaggi non era in realtà del tutto nuovo, poiché era stato concepito per la
prima volta da un famoso fisico francese, Fresnel, agli inizi dell’Ottocento per
risolvere problemi di tutt’altra natura, e cioè di Ottica. Ma, per la verità, né
Steinmetz, né Kennelly ne erano al corrente: all’epoca, la comunicazione
scientifica non viaggiava veloce come ai giorni nostri.
Come vedremo di qui a poco, il metodo di cui parliamo (che va sotto il nome di
metodo simbolico, oppure di metodo dei fasori) è molto efficace perché segue le
stesse vie logiche che si percorrono nel risolvere un qualsiasi circuito in regime
stazionario, con la sola differenza di fare ricorso a certi particolari calcoli
algebrici dei quali occorre acquisire subito piena padronanza.
Questo è il motivo per cui, prima di entrare nel vivo dei ‘trucchi’ inventati da
Steinmetz e Kennelly (che saranno spiegati in dettaglio nei paragrafi seguenti),
conviene presentare subito questa breve parentesi matematica che è alla base di
questi trucchi, e che altro non è se non l’uso dei cosiddetti numeri complessi.
90 - Circuiti elettrici in evoluzione dinamica
I cosiddetti numeri immaginari e, insieme con questi, i numeri complessi fecero la
loro prima apparizione già nel XVI secolo, e, fin dall’inizio, apparvero tanto
‘strani’ da essere indicati, appunto, come immaginari.
In cosa consiste questa stranezza? In una cosa molto semplice. Tutti sanno che non
esiste alcun numero che, elevato al quadrato, dia come risultato (- 1): infatti, si sa
che
(+ 1)2 = + 1 e (- 1)2 = + 1 .
Nessuno può però impedirci di immaginare che esista un altro oggetto matematico
(che non può essere un semplice numero, evidentemente), di tipo completamente
diverso (immaginario, appunto), che goda della proprietà che il suo quadrato sia
pari proprio a (- 1).
Come potremo indicarlo? Il modo più semplice di indicarlo è con il simbolo
-1 ,
(7.15)
perché, applicando semplicemente la regola del quadrato, si ha:
-1
2
=-1.
(7.16)
Con ciò, diciamo la verità, ci siamo semplicemente presi in giro, poiché il simbolo
che abbiamo introdotto, e cioè - 1 , non è un numero, e non può essere, quindi,
né elevato al quadrato, né sommato, né sottratto, né diviso per altri numeri
secondo le normali regole delle quattro operazioni.
Eppure ... vedrete che questa ‘stranezza’ che abbiamo fatto, quando sarà stata
sfruttata nel modo adatto, ci consentirà di risolvere problemi che altrimenti non
avremmo saputo neppure affrontare.
Si tratta, però, come dicevamo, di sapere sfruttare bene questa ‘strana’ idea di
partenza, ‘inventandoci’ opportune ‘regole del gioco’ che ci consentano di fare le
quattro operazioni anche su oggetti come questa immaginaria - 1 .
Cominciamo allora col dire subito che sappiamo attribuire un significato
(immaginario anche questo, ovviamente) a un ‘oggetto’ del tipo - 4 , oppure
- 10 , o che so - 5.21 , e così via. Basta, infatti, scrivere con le solite regole
dell’Algebra:
- 4 = ( 4 ) (- 1) = 4
- 10 = 10
-1 ,
-1 =2 -1 ,
- 5.21 = 5.21
-1 ,
e così via .
91 - Circuiti elettrici in evoluzione dinamica
Scriveremo quindi, indicando con a un generico numero reale (e cioè razionale o
irrazionale) positivo:
-a = +a
-1 .
(7.17)
In questo modo, - a viene scritto affiancando un vero numero reale (che è + a )
a questo oggetto immaginario che è - 1 . Sottolineiamo ancora una volta che
mettere a fianco questi due oggetti diversi non significa moltiplicarli, poiché non
sappiamo ancora, a questo punto della spiegazione, come si moltiplica - 1 per un
numero reale, né per qualsiasi altro ‘oggetto’ matematico.
Con ciò, siamo riusciti a dare una significato sia pure soltanto formale, e cioè in
questo caso immaginario, alla radice quadrata di un qualsiasi numero reale
negativo. Cosa significa, in ultima analisi, la relazione (7.17)? Niente di più che
quest’altra:
-a
2
= - a , (con a > 0) ,
(7.18)
e cioè che il quadrato del numero immaginario - a è il numero reale negativo
(- a).
D’ora innanzi, sarà questo l’unico significato che attribuiremo a oggetti matematici
di questo tipo.
Per non portarsi dietro ogni volta il simbolo - 1 , che è piuttosto ‘pesante’ da
scrivere, si convenne fin dall’inizio di indicarlo con un simbolo più ‘leggero’.
Questo simbolo, d’altra parte, non poteva essere un numero reale (perché non lo
è); si scelse allora di indicarlo con una lettera (che non poteva, evidentemente,
essere confusa con nessun numero): la lettera minuscola ‘j’ (i fisici e matematici
preferiscono la minuscola ‘i’, iniziale di immaginario; noi abbiamo scelto la ‘j’ per
non generare confusione con le correnti, che, d’abitudine, si indicano con nomi
che iniziano con la lettera ‘i’).
Ecco perché, dunque, si affermò rapidamente l’uso di scrivere questi ‘strani’
numeri immaginari nell’ancor più ‘strana’ forma
-a =±j +a ,
(7.19)
essendo ‘a’ un qualsiasi numero reale positivo. In altre parole, nella (7.19), il
simbolo ‘j’ sta al posto di - 1 , e si è implicitamente posto:
92 - Circuiti elettrici in evoluzione dinamica
(+ j)2 =
-1
2
=-1.
(7.20)
D’altra parte, utilizzando le solite regole dell’Algebra, deve aversi pure:
(- j)2 = (+ j)2 = - 1 .
(7.21)
Potremo quindi scrivere, in piena generalità
(± j)2 = - 1 ,
(7.22)
la quale - lo ripetiamo ancora una volta - ha ancora e sempre lo stesso significato
‘immaginario’ dal quale siamo partiti quando, per la prima volta, ci siamo
‘inventati’ l’oggetto rappresentato dal simbolo - 1 .
A conclusione di questa prima discussione, d’ora innanzi diremo che un numero
immaginario è un oggetto rappresentato da un simbolo del tipo
j a , oppure a j
(7.23)
(ad esempio, j 5, oppure 5 j, o - 3 j, o ancora 104 j, e così via), essendo ‘a’ un
numero reale qualsiasi, e ‘j’ la cosiddetta unità immaginaria, definita dalla
relazione
j= -1 .
(7.24)
Una volta introdotti questi strani numeri immaginari, occorre saper fare le quattro
operazioni aritmetiche: altrimenti, davvero non sappiamo cosa farci.
La cosa è molto semplice, se ci serviamo delle stesse regole che usiamo per i
numeri reali. Basta, infatti, stabilire che le operazioni fra numeri immaginari si
fanno così:
• addizione: j a + j b = j (a + b);
ad esempio, 3 j + 2 j = 5 j; 2 j + (- 3) j = (- 1) j = - j;
• sottrazione: j a - j b = j (a - b);
ad esempio, 2 j - 3 j = (2 - 3) j = (- 1) j = - j; - 3 j - 4 j = - 7 j;
• moltiplicazione: (j a) (j b) = (ab) j2 = - ab;
ad esempio, (2 j) (3 j) = 6 j2 = - 6; (- 3 j) (4 j) = - 12 j2 = + 12;
93 - Circuiti elettrici in evoluzione dinamica
• divisione: (j a) : (j b) = a : b ;
ad esempio, (3 j) : (2 j) = 3 : 2 = 1.5; (3 j) : (- 2 j) = - 1.5 .
Nella divisione, in altre parole, l’unità immaginaria ‘si semplifica’.
Per completare il quadro dei numeri immaginari, non resta a questo punto che
stabilire un’ultima cosa importante: come si fanno le quattro operazioni fra
numeri reali e numeri immaginari.
Qui, le cose si complicano un po’, perché si tratta di mettere insieme, in qualche
modo, ‘oggetti’ matematici molto diversi tra loro. Cominciamo quindi col
renderci conto subito che già dalla prima operazione, l’addizione, incontriamo una
difficoltà insormontabile. Se, infatti, proviamo a sommare un qualsiasi numero
reale (che so? 5) a un qualsiasi numero immaginario (ad esempio, 3 j), cosa ne può
‘venire fuori’?
Pensateci un momento: non può veneri fuori né semplicemente un numero reale,
ma neppure un numero immaginario, perché il ‘risultato’ deve in qualche modo
contenere sia il numero reale che quelli immaginario. Cosa fare, allora? In pratica
... non si fa proprio niente, stabilendo che la somma può soltanto essere indicata,
ma non eseguita.
In conclusione, potremo soltanto limitarci a scrivere la somma così com’è, cioè
5+3j,
stabilendo che essa non può essere eseguita: deve semplicemente essere lasciata così
com’è. Anzi: per non correre alcun rischio di confusione, possiamo fare una cosa
ancora più ‘simpatica’, e cioè stabilire una volta per tutte di introdurre un terzo
tipo di ‘oggetti’ matematici (oltre ai numeri reali e ai numeri immaginari), che
chiameremo numeri complessi, per distinguerli dagli altri.
7.2.2 I numeri complessi: forma algebrica e forma polare
D’ora innanzi, quindi, diremo che un ‘numero complesso’ è un oggetto matematico
che ha la seguente forma
a+jb,
(7.29)
94 - Circuiti elettrici in evoluzione dinamica
essendo sia ‘a’ che ‘b’ due qualsiasi numeri reali, e ‘j’ l’unità immaginaria. Spesso,
i numeri complessi vengono indicati con lettere soprassegnate, oppure con un
puntino sovrapposto, scrivendo quindi:
c = a + j b , oppure c = a + j b .
(7.30)
A seconda delle circostanze, ci atterremo all’uno oppure all’altro degli usi.
A questo punto, ancora una volta, per completare il quadro dei numeri complessi e
del loro uso, non ci resta che stabilire come vanno fatte le quattro operazioni.
Siamo così giunti al punto centrale della questione, che è alla base dei ‘trucchi’
inventati da Steinmetz e Kennelly per risolvere i circuiti in regime sinusoidale:
avrete già intuito, infatti, che questi trucchi si basano proprio sull’uso di questi
strani numeri complessi. Quindi, occorre imparare a usarli in modo corretto e
rapido, a partire, ovviamente, dalle quattro operazioni fra numeri complessi.
La cosa, dal punto di vista concettuale, è meno banale di quanto possa apparire a
prima vista: infatti, i matematici ‘rigorosi’ presentano le cose in maniera
abbastanza diversa da come faremo noi di qui a poco. A noi, però, come tante
volte abbiamo ripetuto, quel che davvero interessa è che voi impariate a risolvere i
circuiti in modo rapido e corretto, e rinunzieremo, quindi, a un po’ di rigore, a
patto che ciò serva a rendere le cose più semplici e chiare.
Diciamo subito, dunque, che piuttosto che darvi le definizioni delle quattro
operazioni fra numeri complessi nella loro forma più generale e astratta (come
fanno appunto i matematici), noi preferiamo spiegarvi subito come conviene farle,
in modo da risparmiare fatica. Tanto, per quel che ci serve, il risultato sarà lo
stesso: ... non preoccupatevi.
Per fare quel che abbiamo appena detto, conviene però fare un passo indietro, e
ritornare a un argomento che certamente sapete usare con disinvoltura: le frazioni.
Vi ricordiamo ancora una volta che le frazioni coincidono con quei numeri che
abbiamo chiamato razionali, per distinguerli dagli irrazionali. Vedrete, infatti, che
ci sono ... strane somiglianze fra un argomento facile come le frazioni e uno
complicato come i numeri complessi (almeno per ciò che riguarda i modi in cui
conviene fare le quattro operazioni).
Cominciamo, quindi, col ricordarvi innanzitutto che una frazione, e cioè un
‘oggetto’ matematico che solitamente indichiamo con il simbolo
95 - Circuiti elettrici in evoluzione dinamica
M → generica frazione
N
(7.31)
essendo M e N due qualsiasi numeri interi (ad esempio, 3/4, 11/3, - 4/5, e così
via), può essere espresso anche in una forma diversa, ma equivalente, e cioè in
forma cosiddetta decimale. Possiamo scrivere quindi:
4 = 0.8 , 3 = 0.75 , 2 = 0.6 = 0.666
5
4
3
, 11 = 2.2 , e così via.
5
Le due forme, quella ‘frazionaria’ e quella ‘decimale’, si presentano in modo
completamente diverso, ma sono equivalenti, perché sappiamo come si fa a passare
da una all’altra, e viceversa. Ricordate che, per passare dalla forma frazionaria a
quella decimale, basta dividere in numeratore per il denominatore, mentre per
passare dalla forma decimale a quella frazionaria, bisogna calcolare le cosiddette
‘frazioni generatrici’. Comunque, anche se non lo ricordate in dettaglio, non ve ne
preoccupate. L’importante è che sia chiaro che le due forme sono equivalenti, e
che possono essere usate, l’una oppure l’altra, a seconda di quel che fa più
comodo. In particolare, conviene usare una forma oppure l’altra, a seconda delle
operazioni che bisogna fare.
Se, infatti, occorre eseguire un’operazione di addizione o sottrazione, conviene
ricorrere alla forma decimale. A esempio, dovendo sommare le frazioni 3/4 e 4/5,
conviene eseguire la somma usando le forme decimali
3 + 4 = 0.75 + 0.80 = 1.55 ,
4 5
piuttosto che in forma frazionaria (dove occorre calcolare innanzitutto il minimo
comune denominatore delle due frazioni, e così via).
Quando, invece, occorre eseguire una moltiplicazione o una divisione, conviene di
solito la forma frazionaria. Ad esempio, volendo moltiplicare 3/4 per 4/5,
conveniamo subito che è più semplice usare la forma frazionaria
3⋅4=3,
4 5 5
piuttosto che eseguire la moltiplicazione tra le due forme decimali
0.75 ⋅ 0.8 = 0.6 .
96 - Circuiti elettrici in evoluzione dinamica
La conclusione di questi brevi elementari richiami sull’uso dei numeri decimali e
delle frazioni può così essere riassunta in due punti essenziali:
• l’oggetto matematico chiamato numero ‘razionale’ può essere rappresentato in
due forme diverse, ma equivalenti; è essenziale saper passare da una forma
all’altra, e viceversa, in modo corretto;
• per eseguire le quattro operazioni fra numeri razionali, conviene operare, a
seconda dei casi, utilizzando una forma oppure l’altra; l’importante è che i
risultati, in un modo o nell’altro, siano gli stessi (anche se rappresentati in forma
diversa).
Bene: entrambe le affermazioni contenute nei due punti precedenti valgono anche
per i numeri complessi. Ciò che, quindi, ci accingiamo a fare ora è proprio
mostrarvi innanzitutto le due forme (diverse, ma equivalenti) in cui i numeri
complessi possono essere presentati, mostrandovi come si passa dall’una all’altra (e
viceversa), e poi insegnarvi a fare le quattro operazioni fra numeri complessi,
ricorrendo a una forma oppure all’altra, a seconda della convenienza.
a) Forma algebrica
La cosiddetta forma algebrica di un numero complesso possiamo dire di
conoscerla già, poiché altro non è se non la forma, rappresentata dalla (7.29) con
la quale abbiamo introdotto (e, quindi, definito) i numeri complessi.
Diremo, perciò, che un dato numero complesso c è espresso in forma algebrica,
quando è nella forma
c=a+jb,
(7.32)
‘a’ e ‘b’ essendo due numeri reali qualsiasi, e ‘j’ l’unità immaginaria j = - 1 .
Ad esempio:
c1 = 3 + 4 j , c2 = - 1.2 + j 7.4 , c3 = - 3 - 4.5 j , e così via.
Il numero reale ‘a’ è detto parte reale del numero complesso c, ed è anche indicato
come
a=ℜ c ;
(7.33)
97 - Circuiti elettrici in evoluzione dinamica
il numero reale ‘b’ (senza l’unità
dell’immaginario, ed è indicato come
immaginaria)
b=ℑ c .
è
detto
coefficiente
(7.34)
La (7.32) può essere anche formalmente scritta come
c=ℜ c +jℑ c ,
ma, per la verità, è piuttosto rara.
Un’operazione che ci tornerà utile nel seguito, e che nel campo dei numeri reali
non viene definita, è l’operazione di coniugazione. Diremo coniugato del
numero complesso (7.32), il numero
c* = a - j b ,
in cui l’asterisco ci ricorda proprio la nuova operazione. Il numero complesso c *
ha la stessa parte reale del numero complesso c, ma parte immaginaria opposta.
Ad esempio:
se c = 4 - 5 j → c * = 4 + 5 j .
b) Forma polare
L’altra forma, detta polare, con cui può essere rappresentato un numero
complesso, richiede una semplice costruzione grafica. A questo scopo, cominciamo
col tracciare una coppia di assi cartesiani x e y, come in Figura 7.8, e conveniamo
di indicare l’asse x come asse reale, e l’asse y come asse immaginario. Ciò
fatto, conveniamo di rappresentare il generico numero complesso (7.32) come un
raggio-vettore ‘spiccato’ dall’origine degli assi, come mostrato in Figura 7.8. I
raggi-vettori come c vengono detti comunemente fasori; si parla, quindi,
indifferentemente di ‘numeri complessi in forma polare’, oppure di ‘fasori’, senza
alcuna distinzione di significato.
È chiaro che, in questo modo, la parte reale ‘a’ del numero complesso c
rappresenta la componente lungo l’asse x del vettore c, mentre il numero reale ‘b’
rappresenta l’altra componente del vettore c. Si ha, così:
cx = a , cy = b .
(7.35)
98 - Circuiti elettrici in evoluzione dinamica
y≡ℑ
c
b
α
x≡ℜ
a
0
Figura 7.8: numeri complessi in forma polare.
Dunque, per rappresentare il numero complesso c, è possibile assegnare, invece
che i due numeri reali ‘a’ e ‘b’, gli altri due numeri reali ‘c’ e ‘α’, che
rappresentano rispettivamente:
c → modulo del vettore c e si scrive: mod c ;
α → angolo formato dal vettore c con l’asse reale e si scrive: arg c .
Vale la pena sottolineare che il modulo, trattandosi della lunghezza di un vettore,
è sempre positivo. A proposito di ‘α’, va notato esplicitamente che esso va
considerato positivo quando misurato, a partire dall’asse reale, in senso antiorario,
e negativo, quando è misurato (sempre a partire dall’asse reale) in senso orario.
Perciò lo stesso angolo di Figura 7.9 può essere considerato come positivo, e pari
a 270°, oppure negativo, e pari a - 90°.
270°
- 90°
Figura 7.9: due modi diversi di indicare lo stesso angolo.
Un modo diffuso di indicare il numero complesso c in questa ‘forma polare’ è
scrivere
c= c,α ,
99 - Circuiti elettrici in evoluzione dinamica
oppure anche c = c ∠α, o altre ancora, meno diffuse.
La semplice costruzione grafica mostra con sufficiente chiarezza tanto come si
faccia a passare dalla forma algebrica a quella polare, quanto come si faccia il
passaggio inverso, dalla forma polare a quella algebrica. Per essere il più possibile
chiari, come sempre, ricorriamo a un paio di esempi.
Esempio 1 - Consideriamo il numero complesso espresso nella forma algebrica
c=3+4j.
Per passare in forma polare, costruiamo il grafico seguente, partendo col segnare
l’ascissa 3 e l’ordinata 4. Si ha subito (misurando α con un goniometro)
c = 32 + 42 = 25 = 5 , α ≅ 53° .
Alcuni autori, quando esprimono gli angoli in gradi, sono soliti indicare questa
scelta chiaramente anche nel simbolo, per cui si scrivono, ad esempio, α° ≅ 53°.
Useremo questa distinzione nei simboli solo nei casi in cui si possa dar adito a
qualche confusione.
y≡ℑ
4
c
3
2
1
0
α
1
2 3
x≡ℜ
Esempio 2 - Dato il numero complesso in forma polare
c = 10 , 45° = 10 , π/4 = 10 ∠π/4 .
Per passare in forma algebrica, costruiamo ancora il grafico, partendo questa
volta col tracciare il modulo del vettore c, e cioè il numero positivo 10 in una
100 - Circuiti elettrici in evoluzione dinamica
scala scelta ad arbitrio sul grafico, e posizionando poi il vettore c in modo da
formare l’angolo di 45° con l’asse reale.
y≡ℑ
c = 10
45°
0
x≡ℜ
Non è difficile convincersi che l’operazione di coniugazione di un numero
complesso in forma polare si ottiene cambiando il segno della fase:
c* = c , - α .
A questo punto, il passaggio dalla forma algebrica a quella polare di un qualsiasi
numero complesso, nonché il passaggio inverso dovrebbero essere chiari. Così
come li abbiamo spiegati, essi richiedono sempre la costruzione geometrica di un
grafico del tipo di quelli mostrati negli esempi, e la misura, con un goniometro,
dell’angolo ‘α’. Ora, entrambe le operazioni, benché concettualmente molto
semplici, richiedono però una certa precisione grafica. È preferibile, per evitare
errori, far ricorso a una delle solite calcolatrici, e fare il passaggio da una forma
all’altra, servendosi delle formule che, qui di seguito, riassumiamo.
È forse questo il momento migliore per leggere l’appendice trigonometrica posta
alla fine di questo capitolo.
a) Passaggio da forma algebrica a forma polare.
Cominciamo a dire che se il numero è immaginario, cioè se a = 0, la cosa è
semplice:
se c = j b →
c =b,
α = 90° ,
c = - b , α = 270° ,
se b > 0 ,
se b < 0 .
(7.36a)
101 - Circuiti elettrici in evoluzione dinamica
Facciamo qualche esempio:
c = 3 j → c = 3 , 90° = 3 ∠90° ; c = - 8 j → c = 8 , 270° = 8 ∠270° .
Se, invece, il numero è complesso, allora:
arctan b ,
a
se c = a + j b → c = a2 + b , α =
180° + arctan b ,
a
2
se a > 0 ,
(7.36b)
se a < 0 ,
in cui la funzione ‘arctan’ è detta funzione arcotangente, e la trovate sulle vostre
calcolatrici, vi fornisce il valore della fase del numero complesso se a > 0, vi
fornisce il valore della fase, a meno dell’angolo 180° = π, se a < 0. La sola cosa
cui dovete prestare attenzione è capire come la vostra macchinetta calcolatrice
misura gli angoli, se in gradi, in radianti, o in qualche altra strana unità. Solo un
po’ di ‘confidenza’ con la calcolatrice vi fornirà la sicurezza necessaria per
interpretare correttamente il risultato fornito.
Ad esempio:
c = 1 + j → c = 12 + 12 ≅ 1.42 , α = arctan 1 = 45° = π ;
1
4
c = 3 + 4 j → c = 32 + 42 = 5 , α = arctan 4 ≅ 53.1° ;
3
c=-1+2j→c=
(- 1)2 + 22 ≅ 2.24 , α = 180° + arctan 2 ≅ 116.6° ;
-1
c=-1-3j→c=
(- 1)2 + (- 3)2 ≅ 3.16 , α = 180° + arctan 3 ≅ 251.6° ;
c=1-5j→c=
(- 1)2 + 52 ≅ 5.10 , α = arctan - 5 ≅ - 78.7° = 281.3° .
1
Insomma, ogni volta che state per calcolare la fase di un numero complesso,
dovete valutare con attenzione se sommare, o meno, l’angolo di 180° = π rad alla
funzione arcotangente.
b) Passaggio inverso, da forma polare a forma algebrica.
102 - Circuiti elettrici in evoluzione dinamica
Sono noti c (> 0) e α → a = c cos α , b = c sen α .
(7.37)
Ad esempio:
c = 5 ∠30° → a = 5 cos 30° ≅ 4.33 , b = 5 sen 30° = 2.5 ;
c = 6 ∠120° → a = 6 cos 120° = - 3 , b = 6 sen 120° ≅ 5.20 ;
c = 8 ∠210° → a = 8 cos 210° ≅ - 6.93 , b = 8 sen 210° = - 4 ;
c = 5 ∠310° → a = 5 cos 310° ≅ 3.21 , b = 5 sen 310° ≅ - 3.83 .
7.2.3 Le quattro operazioni fra i numeri complessi
Una volta imparato come si fa a passare rapidamente e correttamente da una
forma all’altra, è semplicissimo imparare a fare le quattro operazioni nel modo
più rapido e sicuro.
È conveniente distinguere le operazioni di addizione/sottrazione, che vanno
eseguite in forma algebrica, dalle operazioni di moltiplicazione/divisione, che
vanno, invece, eseguite in forma polare.
In questo modo, le regole sono semplicissime, e possono essere riassunte secondo
lo schema di seguito indicato.
A) Operazioni di addizione/sottrazione.
Volendo eseguire le operazioni
c1 ± c2 ,
basta porre entrambi i numeri complessi c1 e c2 nelle rispettive forme algebriche
c1 = a1 + j b1 , c2 = a2 + j b2 ,
e operare con le normali regole dell’Algebra elementare. Si ha, cioè:
c = c1 + c2 = a 1 + j b1 + a 2 + j b2 = a 1 + a 2 + j b1 + b2 ;
(7.38)
c = c1 - c2 = a 1 + j b1 - a2 + j b2 = a 1 - a2 + j b1 - b2 .
(7.39)
Siano, ad esempio, c1 = 3 + 4 j e c2 = 2 - 3 j. Allora, risulta:
103 - Circuiti elettrici in evoluzione dinamica
c1 + c2 = 3 + 4 j + 2 - 3 j = 5 + j ; c1 - c2 = 3 + 4 j - (2 - 3 j) = 1 + 7 j .
B) Operazioni di moltiplicazione/divisione.
Volendo eseguire le operazioni
c1 ⋅ c2 , oppure c1 : c2 ,
conviene porre entrambi i numeri complessi nelle rispettive forme polari
c1 = c1 ∠α1 , c2 = c2 ∠α2 ,
ed eseguire le operazioni come segue:
c = c1 ⋅ c2 = c1 ∠α1 ⋅ c2 ∠α2 = c 1 c2 ∠(α1 + α2) ;
(7.40)
c = c1 : c2 = c1 ∠α1 : c2 ∠α2 = c 1 : c 2 ∠(α1 - α2) .
(7.41)
In altri termini, per la moltiplicazione di due numeri complessi i moduli dei
numeri si moltiplicano tra loro, mentre gli angoli si sommano; per la divisione, i
moduli si dividono, e gli angoli si sottraggono.
Siano, ad esempio, c1 = 10 ∠45° e c2 = 5 ∠30°. Si ha, allora:
c1 ⋅ c2 = 50 ∠75° , c1 : c2 = 2 ∠15° .
Vale la pena osservare che, dovendo sommare (oppure sottrarre) due numeri
complessi dati in forma polare, ad esempio
c1 + c2 = 10 ∠45° + 5 ∠30° ,
conviene trasformarli dalla forma polare a quella algebrica, in modo che
c1 = 10 ∠45° = 10 cos 45° + j 10 sen 45° ≅ 7.07 + 7.07 j ,
c2 = 5 ∠30° = 5 cos 30° + j 5 sen 30° ≅ 4.33 + 2.5 j ,
e poi eseguire la somma
c1 + c2 ≅ 7.07 + 7.07 j + 4.33 + 2.5 j = 11.4 + 9.57 j .
104 - Circuiti elettrici in evoluzione dinamica
Viceversa, dovendo moltiplicare (o dividere) due numeri complessi espressi in
forma algebrica, conviene, innanzitutto, trasformarli in forma polare e, poi,
eseguire la moltiplicazione (o divisione).
7.3 I ‘trucchi’ di Steinmetz e Kennelly
Ora che abbiamo introdotto i numeri complessi, e abbiamo anche imparato a
operare su essi, possiamo finalmente ritornare alla questione centrale dalla quale
eravamo partiti, e cioè quella di trovare un metodo semplice e rapido per
risolvere correttamente ‘a mano’ (e cioè senza l’uso di Spice) i circuiti in regime
sinusoidale.
È chiaro che quando parliamo dei ‘trucchi’ che furono inventati da Steinmetz e
Kennelly per risolvere il problema, questo è soltanto un modo per indicare i
metodi (rigorosi anche da un punto di vista matematico) mediante i quali i due
autori riuscirono a risolvere le equazioni differenziali che governano il
funzionamento dei circuiti in regime sinusoidale.
A noi, però, come al solito, non interessa qui imparare questi metodi matematici
(anche perché ce ne mancherebbero le basi, al momento), bensì imparare a
risolvere i circuiti. Ecco perché, anche per alleggerire il tono, parliamo di
‘trucchi’ di Steinmetz e Kennelly, pur sapendo bene che i metodi utilizzati sono
tutt’altro che ‘magici’, ma hanno, invece, rigorose basi matematiche.
Non ci resta, a questo punto, che spiegarvi come si usano.
L’idea centrale del metodo è molto semplice, e prende spunto dalla definizione
stessa di regime sinusoidale. Ricordando, infatti, che una rete è in regime
sinusoidale, quando tutte le correnti e tensioni della rete sono funzioni sinusoidali
del tempo dotate della stessa pulsazione ω, ciascuna corrente e ciascuna tensione
può essere scritta nella forma generica
a(t) = A 2 sen(ωt + α) ,
(7.41)
nella quale ω è la pulsazione, fissata una volta per tutte (in Italia è
ω = 2π 50 ≅ 314 rad/s), mentre il valore efficace A, oppure l’ampiezza
AM = A 2 , e la fase α sono ovviamente diverse per le diverse correnti e tensioni.
D’altra parte, è vera anche la proprietà inversa: e cioè, se di una data corrente (o
tensione) conosciamo il valore efficace, diciamo ad esempio 10 A, nonché la fase,
ad esempio π/4, è semplicissimo scrivere l’espressione della grandezza considerata:
105 - Circuiti elettrici in evoluzione dinamica
i(t) = 10 2 sen 314t + π .
4
Negli USA, invece di ω = 2π ⋅ 50 rad/s, avremmo dovuto scrivere
ω' = 2π ⋅ 60 rad/s, perché la ‘frequenza di rete’ è pari a 60 Hz, invece che 50 Hz.
È chiaro, dunque, che ciascuna delle grandezze fondamentali di una rete che
funzioni in regime sinusoidale (a una data pulsazione) è individuata univocamente
da due numeri: il suo valore efficace, sempre positivo (oppure, equivalentemente,
dalla sua ampiezza, pari a 2 volte il valore efficace), e la sua fase, che può
essere, invece, sia positiva che negativa, (o anche nulla).
Viene spontaneo allora concludere che ciascuna corrente e tensione di una rete in
regime sinusoidale (alla assegnata pulsazione ω) può essere rappresentata da un
numero complesso espresso nella forma polare A ∠α, oppure, il che è
evidentemente la stessa cosa, dal corrispondente fasore rappresentato in Figura
7.10.
y≡ℑ
A
α
0
x≡ℜ
Figura 7.10: fasore rappresentativo di una generica grandezza elettrica.
In ultima analisi, è proprio questo il primo dei trucchi da usare (in particolare,
quello dovuto essenzialmente a Steinmetz): sostituire alle incognite funzioni
sinusoidali del tempo i(t) e v(t) incognite indipendenti dal tempo, e costituite da
fasori, cioè numeri complessi espressi in forma polare.
Il vantaggio di un simile ‘trucco’ è evidente poiché riporta le cose, in qualche
modo, a una situazione simile a quella che c’era in regime stazionario (in cui le
incognite erano, appunto, indipendenti dal tempo), con la sola differenza che, in
regime stazionario, le incognite sono rappresentate da numeri reali, mentre, in
regime sinusoidale, le incognite debbono essere rappresentate da fasori, e cioè,
ripetiamolo ancora una volta, da numeri complessi.
106 - Circuiti elettrici in evoluzione dinamica
L’altro trucco, essenzialmente dovuto a Kennelly, fu quello di riuscire a
trasformare le caratteristiche dinamiche dei bipoli dotati di memoria (in
particolare, induttore e condensatore ideale), in caratteristiche statiche che
collegano fra loro non più le funzioni sinusoidali del tempo che rappresentano le
correnti e le tensioni, bensì i fasori che le rappresentano. La ‘regola’ in base alla
quale questa fondamentale trasformazione viene realizzata è molto semplice, e può
essere enunciata nel modo seguente: la caratteristica di ciascuno dei tre bipoli
fondamentali, resistore, induttore e condensatore ideale, va scritta fra i fasori
rappresentativi della tensione e della corrente di ciascun bipolo, ed è sempre della
forma
V=±ZI ,
(7.42)
nella quale va il segno ‘+’ se si è fatta per il bipolo la convenzione dell’utilizzatore,
il segno ‘-’ in caso contrario, e inoltre V e I sono i fasori rappresentativi
rispettivamente della tensione e della corrente ai morsetti del bipolo. Infine, Z è
un numero complesso che è diverso per i tre bipoli fondamentali:
• per il resistore
Z=R,
(7.43)
in cui R è la stessa resistenza del resistore considerato in regime stazionario;
• per l’induttore ideale
Z=jωL,
(7.44)
in cui ω è la pulsazione comune a tutte le grandezze fondamentali del regime
sinusoidale considerato, L è l’induttanza che figura nella caratteristica dinamica
dell’induttore (6.3), e ‘j’ è l’unità immaginaria; se ne conclude che, in questo caso,
Z è un numero immaginario;
• per il condensatore ideale
Z=-
j
ωC
,
(7.45)
107 - Circuiti elettrici in evoluzione dinamica
in cui ω è la pulsazione comune a tutte le grandezze fondamentali del regime
sinusoidale considerato, C è la capacità che figura nella caratteristica dinamica del
condensatore (6.5), e ‘j’ è l’unità immaginaria; anche in questo caso, Z è un
numero immaginario.
Il numero Z prende il nome di impedenza del bipolo corrispondente, e ha le
dimensioni di una resistenza, cioè ohm. Vale la pena osservare esplicitamente due
cose:
• l’impedenza Z è indicata con la lettera zeta maiuscola sormontata da un pallino
piuttosto che da un trattino per sottolineare il fatto che essa è un numero (reale o
immaginario) che non rappresenta alcuna grandezza fondamentale della rete;
• il numero Z è rappresentato in forma algebrica, e non polare.
Aggiungiamo, infine, che la resistenza R è indipendente dalla pulsazione ω del
regime sinusoidale considerato. Invece, la quantità reale
XL = ω L ,
(7.46)
che è strettamente positiva (perché sia ω che L lo sono) prende il nome di
reattanza induttiva, cresce per una data L, al crescere della pulsazione ω, come
mostrato in Figura 7.11 (con L = tan α).
XL = ω L
α
0
ω
Figura 7.11: la reattanza induttiva cresce linearmente con la pulsazione.
Si vede, così, che, mentre il comportamento di un resistore non risente della
pulsazione ω del regime sinusoidale considerato, la reattanza induttiva di un
induttore ideale ne risente, invece, in maniera significativa, crescendo linearmente
con ω, e diventando tanto più grande, approssimando, cioè, il comportamento di
un circuito aperto, quanto più elevato è il valore della frequenza. Questo è il
motivo per cui, in regime stazionario, e cioè quando la frequenza tende a
108 - Circuiti elettrici in evoluzione dinamica
diventare nulla, la reattanza induttiva dell’induttore tende a diventare nulla, e,
corrispondentemente, l’induttore tende a comportarsi come un corto circuito.
D’altra parte, la quantità reale
XC = 1 ,
ωC
(7.47)
che è, come la reattanza induttiva, strettamente positiva (perché sia ω che C lo
sono), diminuisce, invece, per una data C, al crescere della pulsazione ω, come
mostrato in Figura 7.12.
XC = 1
ωC
0
ω
Figura 7.12: la reattanza capacitiva decresce con la pulsazione.
Si vede così che anche il comportamento del condensatore ideale risente
fortemente della pulsazione del regime considerato: ne risente, però, in modo
inverso rispetto all’induttore. Infatti, esso tende a comportarsi come un circuito
aperto quando la pulsazione ω tende a zero (poiché XC tende a diventare sempre
più grande, come una resistenza progressivamente crescente), mentre tende a
comportarsi come un corto circuito quando la pulsazione ω cresce indefinitamente
(poiché XC diminuisce progressivamente, come una resistenza che diventa sempre
più piccola).
La tabella che segue riassume il comportamento dei due bipoli a memoria,
induttore e condensatore, alle basse e alte pulsazioni (o frequenze).
Basse frequenze
Alte frequenze
Induttore ideale
Corto circuito
Circuito aperto
Condensatore ideale
Circuito aperto
Corto circuito
Per completare la nostra analisi, non ci resta che esaminare separatamente come i
tre bipoli fondamentali, resistore, induttore e condensatore, si comportino quando
funzionano in corrente alternata. Ciò vuol dire che, se immaginiamo che su
109 - Circuiti elettrici in evoluzione dinamica
ciascun bipolo venga fatta la convenzione dell’utilizzatore, vogliamo studiare
l’andamento temporale quando siano alimentati, ad esempio, da una corrente
sinusoidale del tipo
i(t) = I0 2 sen(ωt) ,
che può essere rappresentata, secondo la (7.41), dal numero complesso a fase nulla
I = I0 .
• Per il resistore, risulta
V = R I = R I0 ,
e i due fasori, quello che rappresenta la tensione e quello della corrente, hanno
entrambi fase nulla, e sono due vettori paralleli diretti nella stessa direzione
(quella dell’asse reale positivo), come suggerisce la Figura 7.13.
ℑ
V= R I
I
0
I
R
−
+
ℜ
V
V
Figura 7.13: fasori che rappresentano tensione e corrente ai capi di un resistore.
Rappresentando la tensione nella forma di sinusoide, la precedente relazione
diventa:
v(t) = R I0 2 sen(ωt) .
L’andamento temporale della tensione e corrente è rappresentato, in un caso
particolare, in Figura 7.14. Si noti, innanzitutto, che in ascisse non abbiamo
riportato il tempo t, ma la grandezza adimensionale ωt, ad esso proporzionale: è
questa una comoda rappresentazione alla quale spesso ricorreremo nel seguito. In
questo modo abbiamo evitato di specificare quanto valga la pulsazione di lavoro ω.
Osservate, poi, come le due sinusoidi assumano i valori massimo e minimo, o
110 - Circuiti elettrici in evoluzione dinamica
intersechino l’asse dei tempi, proprio negli stessi istanti: è questo il significato
dell’espressione in fase, che abbiamo in precedenza introdotto. Le due sinusoidi
evolvono nel tempo (qualche volta si dice pure oscillano, ricordando il pendolo) in
maniera sincrona. Tuttavia dovete convenire con noi nel dire che è più semplice
accorgersi che due fasori siano in fase dal diagramma di Figura 7.13, piuttosto che
riconoscerlo dall’andamento temporale delle corrispondenti sinusoidi di Figura
7.14.
Corrente
Tensione
1.5
1
0.5
ωt
0
-0.5
I0 = 1 A
2
1
R= Ω
2
-1
-1.5
-8
-6
-4
-2
0
2
4
6
8
Figura 7.14: tensione e della corrente ai capi di un resistore.
• Per l’induttore, risulta (Figura 7.15)
V = j ω L I = j XL I0 ,
e, assumendo che il fasore della corrente sia diretto come l’asse reale positivo, il
fasore che rappresenta la tensione punta nella direzione dell’asse immaginario
positivo.
I due fasori formano un angolo mutuo di 90° e sono, pertanto, in quadratura. Più
precisamente, usando, come abbiamo già fatto per la misura degli angoli, quale
verso di riferimento quello antiorario, cioè il verso di rotazione opposto a quello
delle lancette dell’orologio, diciamo pure che la tensione è in anticipo di 90°
rispetto alla corrente (o, se preferite, che la corrente è in ritardo di 90° rispetto
111 - Circuiti elettrici in evoluzione dinamica
alla tensione). Rappresentando la tensione nella forma di sinusoide, e considerando
che j = 1 ∠π/2, che la precedente relazione diventa:
v(t) = ω L I0 2 sen ωt + π .
2
ℑ
XL = ωL
V = j XL I
V
I
I
0
−
+
ℜ
V
Figura 7.15: fasori che rappresentano tensione e corrente ai capi di un induttore.
L’andamento temporale della tensione e corrente è rappresentato, in un caso
particolare, in Figura 7.16.
Corrente
Tensione
1.5
1
0.5
ωt
0
-0.5
I0 = 1 A
2
1
ωL = Ω
2
-1
-1.5
-8
-6
-4
-2
0
2
4
6
8
Figura 7.16: tensione e della corrente ai capi di un induttore.
Notate come la tensione assuma il suo valore massimo all’istante zero, mentre la
corrente raggiunge il massimo solo qualche tempo dopo (nel grafico per
ωt = π/2 = 1.57 ): la tensione, allora, è in anticipo rispetto alla corrente.
112 - Circuiti elettrici in evoluzione dinamica
• Per il condensatore, risulta (Figura 7.17)
V= -
j I=-j X I ,
C 0
ωC
e, assumendo, come d’abitudine, che il fasore della corrente sia diretto come l’asse
reale positivo, il fasore che rappresenta la tensione punta nella direzione dell’asse
immaginario negativo. I due fasori formano un angolo mutuo di 90° e sono,
pertanto, in quadratura. Più precisamente, usando, come abbiamo già fatto per la
misura degli angoli, quale verso di riferimento quello antiorario, diciamo pure
che la tensione è in ritardo di 90° rispetto alla corrente (o, se preferite, che la
corrente è in anticipo di 90° rispetto alla tensione).
ℑ
XC = 1/(ωC)
V = - j XC I
I
0
ℜ
I
−
+
V
V
Figura 7.17: fasori che rappresentano tensione e corrente ai capi di un
condensatore.
Rappresentando la tensione nella forma di sinusoide, e considerando che
j = 1 ∠π/2, la precedente relazione diventa:
v(t) = 1 I 0 2 sen ωt - π .
ωC
2
113 - Circuiti elettrici in evoluzione dinamica
Corrente
Tensione
1.5
1
0.5
0
-0.5
I0 = 1 A
2
ωC = 2 S
-1
-1.5
-8
-6
-4
-2
0
2
4
6
8
Figura 7.18: tensione e della corrente ai capi di un condensatore.
L’andamento temporale della tensione e corrente è rappresentato, in un caso
particolare, in Figura 7.18. Notate come la tensione assuma il suo valore minimo
all’istante zero, mentre la corrente ha già raggiunto il minimo qualche tempo
prima (nel grafico per ωt = - π/2 = - 1.57 ): la tensione, allora, è in ritardo
rispetto alla corrente.
Bene: a questo punto, vi attende una ... lieta sorpresa: i ‘trucchi’ sono finiti, e voi
siete ormai in possesso di tutto ciò che vi serve per risolvere ‘a mano’ una rete in
regime sinusoidale. Nel paragrafo seguente, vi spiegheremo come si fa, e ...
vedrete che è molto semplice.
7.4 La risoluzione di una rete in regime sinusoidale con il ‘metodo dei
fasori’
Arrivati a questo punto, e cioè, una volta che abbiamo imparato come si opera con
i numeri complessi, e abbiamo inoltre capito i due trucchi fondamentali escogitati
da Steinmetz e Kennelly, siamo finalmente in condizioni di spiegarvi in dettaglio
come si fa a risolvere ‘a mano’ una qualsiasi rete in regime sinusoidale. La cosa è
in realtà molto semplice, perché si tratta, in ultima analisi, di ripercorrere passo
dopo passo le stesse vie che si seguono in regime stazionario, con le sole seguenti
differenze:
114 - Circuiti elettrici in evoluzione dinamica
• ciascuna incognita della rete (tensione o corrente) è rappresentata da un numero
complesso (e non da un numero reale) costante nel tempo;
• le LK vanno scritte allo stesso modo che in regime stazionario, a patto di
scriverle fra i numeri complessi (e non reali) rappresentativi delle correnti e delle
tensioni;
• la caratteristica di ciascuno resistore, induttore o condensatore ideale va scritta,
con la convenzione dell’utilizzatore, nella forma statica
V = Z I , in cui si è posto
Z=R,
Z=jωL,
Z=-j 1 ,
ωC
per il resistore,
per l’induttore,
per il condensatore;
(7.48)
(7.49)
(7.50)
• la caratteristica di un generatore sinusoidale di tensione è del tipo
V=E,
(7.51)
essendo E un numero complesso noto, mentre la caratteristica di un generatore
sinusoidale di corrente è del tipo
I=J ,
(7.52)
essendo J un numero complesso noto.
A parte le cose segnate in questa cornice, niente altro cambia rispetto alla
risoluzione di una rete in regime stazionario. Ciò significa, in particolare, che la
risoluzione della rete si riduce alla soluzione di un opportuno sistema di equazioni
algebriche che hanno, come incognite, numeri complessi invece che numeri reali.
Per chiarire questo fondamentale aspetto della questione, facciamo ricorso subito a
un semplice esempio.
Consideriamo la rete rappresentata in Figura 7.19, e proponiamoci di risolverla
quando essa funziona in regime sinusoidale alla frequenza f = 50 Hz (cioè alla
pulsazione ω = 2π ⋅ 50 rad/s), imposta dal generatore sinusoidale di tensione la cui
f.e.m. vale:
e(t) = 100 2 sen ωt + π .
4
115 - Circuiti elettrici in evoluzione dinamica
R
+
e(t)
L
−
Figura 7.19: circuito R-L funzionante in regime sinusoidale.
Per fissare le idee anche da un punto di vista numerico, assumiamo inoltre i
seguenti valori per i parametri R e L: R = 10 Ω, L = 10 mH. Cominciamo,
dunque, come al solito, a compiere le operazioni di rito, e cioè a battezzare tutte le
grandezze fondamentali del circuito, come mostrato in Figura 7.20, in cui i nodi
sono stati chiamati con 0, 1 e 2 per motivi che saranno chiariti alla fine del
paragrafo.
1
+
+
vR(t)
−
2
+
R
e(t)
L
−
i(t)
vL(t)
−
0
Figura 7.20: convenzioni per le tensioni e la corrente.
Applichiamo, ora, la LKC, la quale ci dice, ovviamente, che, essendo tutti i bipoli
collegati in serie, esiste un’unica corrente i(t) circolante nel circuito.
Conformemente alle regole enunciate, consideriamo, come incognita, il numero
complesso (costante nel tempo), che indicheremo, ad esempio, con I, al posto della
funzione sinusoidale
i(t) = I 2 sen(ωt + α) ,
116 - Circuiti elettrici in evoluzione dinamica
della quale, al momento conosciamo la sola pulsazione ω, mentre ignoriamo il
valore efficace I e la fase α. Decidiamo pure di usare i radianti per misurare gli
angoli per lo svolgimento di questo esempio; pertanto, controllate che anche le
vostre calcolatrici misurino gli angoli in radianti, altrimenti rischiate di trovare
risultati ... falsi.
Comportandoci in modo analogo per quel che riguarda le altre grandezze
fondamentali del circuito, e cioè le tensioni, considereremo come incognite, in
luogo delle funzioni sinusoidali
vR(t) = VR 2 sen(ωt + β) , vL(t) = VL 2 sen(ωt + γ) ,
i numeri complessi (costanti nel tempo) che indicheremo rispettivamente con VR e
VL. Indicheremo poi con E il numero complesso (anch’esso costante nel tempo)
che rappresenta la funzione sinusoidale nota e(t) = 100 2 sen(ω t + π/4).
A questo punto, completato il battesimo di tutte le grandezze fondamentali del
circuito, non ci resta che applicare la LKT e aggiungere le caratteristiche dei
diversi bipoli che costituiscono la rete.
La LKT, applicata all’unica maglia esistente, è scritta subito nella forma:
- E + VR + VL = 0 .
(7.53)
Con il simbolo 0 abbiamo indicato un numero complesso che ha sia la parte reale,
sia quella immaginaria, nulle. La caratteristica dei diversi bipoli sono, d’altra
parte:
VR = R I ,
(7.54)
VL = j ω L I ,
(7.55)
E = 100 ∠π/4 ≅ 70.71 + 70.71 j .
(7.56)
Con ciò, come si vede, abbiamo terminato la scrittura di tutte le equazioni che
governano il funzionamento della rete, e cioè le LK nonché le caratteristiche di
tutti i bipoli. È bene notare ancora una volta che abbiamo fatto, quindi, le stesse
cose che avremmo fatto in regime stazionario, con la sola differenza di
considerare, come incognite, numeri complessi (costanti nel tempo), piuttosto che
numeri reali.
Sostituendo le (7.54), (7.55) e (7.56) nella (7.53), otteniamo:
117 - Circuiti elettrici in evoluzione dinamica
RI+jω LI=E.
(7.57)
Adoperando, a primo membro, le usuali regole dell’Algebra elementare e la
(7.56), possiamo scrivere (mettendo in evidenza I)
(R + j ω L) I = 100 ∠π/4 ,
(7.58)
e, sostituendo i valori numerici di R, L e ω, otteniamo:
(10 + j 2π ⋅ 50 ⋅ 10 ⋅ 10 -3) I = (10 + j π) I = 100 ∠π/4 .
(7.59)
Siamo, con ciò, arrivati a un’equazione algebrica lineare nella quale l’unica
incognita presente è il numero complesso I. La soluzione di questa equazione,
utilizzando ancora una volta le usuali regole dell’Algebra elementare, può essere
scritta nella forma:
I = 100 ∠π/4 ,
10 + j π
(7.60)
e cioè come rapporto tra due numeri complessi noti. Osserviamo subito, però, che,
mentre il numeratore è scritto in forma polare (e cioè come fasore), il
denominatore è scritto, invece, in forma algebrica. Per eseguire la divisione,
allora, conviene trasformare i due numeri complessi nella stessa forma: in questo
caso, conviene trasformare il denominatore in forma polare, in modo che
l’incognita I, una volta calcolata, risulti espressa automaticamente anch’essa come
fasore.
Ricordando la regola di trasformazione da forma algebrica a forma polare
rappresentata dalla (7.36), possiamo scrivere:
mod(10 + j π) = 102 + π2 ≅ 109.87 ≅ 10.48 ,
(7.61)
e, esprimendo gli angoli in radianti,
arg(10 + j π) = arctan π ≅ 0.30 .
10
Riassumendo, possiamo scrivere, quindi:
10 + j π ≅ 10.48 ∠0.30 ,
(7.62)
118 - Circuiti elettrici in evoluzione dinamica
e, sostituendo nella (7.60):
I≅
100 ∠π/4
.
10.48 ∠0.30
Ricordando, infine, che la divisione va fatta dividendo i moduli e sottraendo
l’argomento del denominatore da quello del numeratore, otteniamo infine:
I ≅ 9.54 ∠0.48 ≅ 8.46 + 4.41 j .
(7.63)
Abbiamo così trovato il valore (precedentemente incognito) del numero complesso
I. Le (7.54) e (7.55) ci forniscono allora i valori di VR e di VL. Anche in questo
caso, conviene prima trasformare i numeri complessi R e j ω L, scritti in forma
algebrica, in forma polare per mezzo della regola (7.36):
R = 10 = 10 ∠0 , j ω L = 2π ⋅ 50 ⋅ 0.01 j = j π = π ∠π/2 .
+
+
E
VR
−
y≡ℑ
+
R
L
−
I
−
VL
E
VL
VR
0
x≡ℜ
E = VR + VL
Figura 7.21: verifica grafica della LKT.
Otteniamo, così:
VR = R I ≅ 10 ∠0 ⋅ 9.54 ∠0.48 = 95.4 ∠0.48 ≅ 84.62 + 44.05 j ,
(7.64)
VL = jωLI ≅ π ∠π/2 9.54 ∠0.48 = 29.96 ∠2.05 ≅ - 13.81 + 26.59 j . (7.65)
Possiamo anche verificare i risultati trovati sostituendo nella LKT (7.53) i valori
calcolati:
119 - Circuiti elettrici in evoluzione dinamica
- E + VR + VL ≅ - 70.71 - 70.71 j + 84.62 + 44.05 j - 13.81 + 26.59 j =
= 0.1 - 0.07 j .
La somma delle tre tensioni, come c’era da aspettarsi, non è esattamente zero a
causa delle approssimazioni introdotte nel calcolo delle funzioni trigonometriche.
Noi abbiamo sviluppato i calcoli approssimando i diversi numeri con due cifre
decimali dopo la virgola; se provate a ripetere gli stessi calcoli con quattro cifre
decimali dopo la virgola, troverete che la LKT è verificata con maggiore
accuratezza dato che troverete un numero complesso ancora più vicino allo zero.
La Figura 7.21 suggerisce la stessa verifica, appena eseguita sviluppando le
operazioni sui numeri complessi, rappresentando nel piano complesso i fasori
corrispondenti alle tre tensioni E, VR e VL.
A questo punto, la rete è completamente risolta in termini di fasori rappresentativi
delle diverse grandezze fondamentali. Non ci resta che utilizzare il trucco di
Steinmetz in senso inverso, per ritornare dai fasori alle funzioni sinusoidali del
tempo. Ricordando, allora, che il modulo del fasore altro non è se non il valore
efficace della funzione sinusoidale, e l’argomento del fasore è la fase, concludiamo
subito che
i(t) = 2 mod I sen ωt + arg I = 9.54 2 sen(ωt + 0.48) ,
(7.66)
e, analogamente, che
vR(t) = 95.4 2 sen(ωt + 0.48) ,
(7.67)
vL(t) = 29.96 2 sen(ωt + 2.05) .
(7.68)
E, con ciò, la rete è completamente risolta.
Possiamo, a questo punto, verificare la validità della LKT nel dominio del tempo,
cioè controllare che, istante per istante, è:
- e(t) + vR(t) + vL(t) = 0 .
In Figura 7.22 abbiamo riportato gli andamenti temporali di queste tre tensioni,
per una durata di due periodi (ricordate che T = 20 ms). Notate che l’istante
generico, nella scala temporale scelta, è misurato in millisecondi (ms).
120 - Circuiti elettrici in evoluzione dinamica
150
100
e(t)
50
vR(t)
0
t (ms)
-50
vL(t)
-100
-150
-10
-5
0
5
10
15
20
25
30
Figura 7.22: andamento temporale delle tre tensioni e(t), vR(t) e vL(t).
Osservate pure che l’asse dei tempi appare tratteggiato: abbiamo, infatti, disegnato
pure la funzione F(t) = - e(t) + vR(t) + vL(t) che dovrebbe essere esattamente nulla
ma che, per le approssimazioni introdotte nel calcolo dei numeri complessi, non è
rigorosamente nulla. Tuttavia, nella scala delle ordinate scelta per costruire la
Figura 7.22, la funzione F(t) appare schiacciata sull’asse dei tempi. Se ci riflettete
un momento, questa funzione rappresenta proprio una misura dell’errore
numerico commesso: se non commettessimo alcun errore di approssimazione,
questa funzione sarebbe nulla in ogni istante, cioè F(t) = 0.
Provate voi a verificare che la funzione F(t) nei quattro istanti t = - 5 ms,
t = 5 ms, t = 15 ms e t = 25 ms (segnati con delle crocette in figura), vale:
F(-5) = F(15) ≅ - 0.13421 , F(5) = F(25) ≅ 0.13421 .
Prima di concludere questo paragrafo, vogliamo mostrarvi un primo esempio di
sintassi Spice per una rete che funzioni in regime sinusoidale. Lo scopo è di
convincervi che, dopo le istruzioni che avete imparato alla fine del regime
stazionario e quelle che codificano un induttore e un condensatore, studiate nel
Capitolo 6, avete bisogno veramente di poco per adoperare il simulatore anche in
corrente alternata.
121 - Circuiti elettrici in evoluzione dinamica
Pertanto, qui di seguito trovate il file di ingresso da dare a Spice per realizzare la
rete di Figura 7.20. Come d’abitudine, la prima riga assegna un nome al file,
mentre la seconda è un commento.
Esempio
* Primo esempio di circuito in alternata
R1
1
2
10
L1
2
0
10m
VE
1
0
AC
141.42 - 45
.AC LIN
1
50
50
.END
La terza e la quarta riga dovrebbero esservi familiari: esse codificano un resistore,
tra i nodi 1 e 2, e un induttore, tra i nodi 2 e 0, di valore 10 Ω e 10 mH,
rispettivamente.
La quinta linea stabilisce che tra i nodi 1 e 0 vi è un generatore sinusoidale (AC)
di tensione di ampiezza 100 2 V ≅ 141.42 V e fase - 45°. Va bene per l’ampiezza,
ma la fase assegnata è + 45° = π/4; da dove salta fuori il segno meno? Per
comprenderlo sino in fondo, bisogna sapere che Spice assume la seguente funzione
per realizzare un generatore sinusoidale:
e(t) = EM cos(2πf t + α) .
L’ampiezza vale E M; Spice, però, invece di usare la funzione seno, adopera la
funzione coseno. Noi siamo abituati ad usare la funzione seno. Come sono
collegate le funzioni seno e coseno? È facile: nella appendice trigonometrica posta
alla fine di questo capitolo, troverete la formula che risolve il nostro problema
sen x = cos x - π .
2
In tal modo, il generatore assegnato può anche scriversi nella forma equivalente
e(t) = 100 2 sen ωt + π = 100 2 cos ωt + π - π = 100 2 cos ωt - π ,
4
4 2
4
che, dando come di consueto un nome che inizia con V al generatore, può
codificarsi per mezzo della seguente riga:
VE
1
0
AC
141.42
- 45 .
122 - Circuiti elettrici in evoluzione dinamica
La sesta linea del pacchetto di istruzioni ‘.AC’ richiede a Spice di eseguire una
analisi in regime sinusoidale del circuito per un sol valore della frequenza (1 è il
terzo termine nell’istruzione in questione) pari a 50 Hz. Per esaminare
compiutamente l’istruzione, scriviamola in generale:
.AC
LIN
NP
FSTART
FSTOP .
Essa informa il programma che desideriamo venga effettuata un’analisi in regime
sinusoidale a partire dalla frequenza iniziale FSTART, fino a raggiungere la
frequenza finale FSTOP, e questa analisi va ripetuta NP volte. Esemplifichiamo
questa istruzione con un esempio:
.AC
LIN
5
10
50 .
Essa richiede che l’analisi in regime sinusoidale di un certo circuito vada ripetuta
5 volte, a partire dalla frequenza di 10 Hz, fino alla frequenza di 50 Hz, e cioè per
le cinque frequenze: 10 Hz, 20 Hz, 30 Hz, 40 Hz e 50 Hz.
Se vogliamo esaminare la rete per una sola frequenza (come è nel nostro caso)
basterà porre NP = 1 e far coincidere la frequenza iniziale con quella finale, come
abbiamo fatto noi scrivendo due volte 50 Hz.
La parolina ‘LIN’ informa Spice che vogliamo che, nel caso la rete vada esaminata
per diverse frequenze, esse dovranno variare linearmente dal valore iniziale a
quello finale, secondo una spaziatura costante data dalla formula:
SPAZIATURA = FSTOP - FSTART .
NP - 1
Più avanti, studiando la risonanza, discuteremo meglio questo punto.
Come per i circuiti in regime stazionario, Spice fornisce in uscita il potenziale dei
due nodi 1 e 2, assumendo quale riferimento per le tensioni il nodo indicato con 0.
Le tensioni vengono riportate come numeri complessi espressi sia in forma
algebrica, sia in forma polare, come vedremo tra breve.
7.5 Impedenza complessa
La relazione (7.57) del precedente paragrafo può anche essere riscritta nella
forma:
123 - Circuiti elettrici in evoluzione dinamica
I=
E
.
R+jωL
Essa mette in evidenza che la tensione complessa E agisce sull’impedenza
complessa
Z=R+jωL.
Questa impedenza, che è un numero complesso, è costituita da una parte reale di
valore R e di una parte immaginaria di valore ω L. Se provate a riflettere un
momento su questo risultato, concluderete che c’era da aspettarselo. Il generatore
di tensione ‘vede un’impedenza equivalente che è pari alla somma delle impedenze
che rappresentano, rispettivamente, il resistore e l’induttore: le due impedenze,
essendo percorse dalla stessa corrente, sono in serie. Ma allora è proprio come in
corrente continua: due (o più) impedenze in serie si possono sintetizzare in
un’unica impedenza equivalente, pari alla somma delle impedenze che
costituiscono la serie. La Figura 7.23 riassume graficamente ciò che abbiamo
appena affermato.
Z1
Z2
Z = Z1 + Z2
Figura 7.23: serie di impedenze.
Allora, se abbiamo N impedenze in serie, possiamo trasformarle in un’unica
impedenza di valore:
Z = Z1 + Z2 +
+ ZN .
(7.69)
Anche per il parallelo valgono le stesse regole che abbiamo introdotto per le reti
in regime stazionario. Prima però di esaminarle, è bene introdurre la ammettenza,
definita come l’inverso dell’impedenza:
Y= 1 =G+jB.
Z
(7.70)
124 - Circuiti elettrici in evoluzione dinamica
Anche in regime stazionario abbiamo fatto la stessa cosa quando abbiamo
introdotto la conduttanza, che era definita come l’inverso della resistenza. Solo per
fare un po’ di gergo, è bene sottolineare che la parte reale dell’ammettenza (G)
viene detta conduttanza, mentre la parte immaginaria (B) si chiama suscettanza.
Ebbene, se abbiamo due bipoli in parallelo, possiamo rappresentare il bipolo
equivalente con un’unica ammettenza (Figura 7.24):
Y = Y1 + Y2 .
Questa relazione, scritta in termini di impedenze, diventa in tutto simile alla regola
del parallelo di due resistori (che ben conoscete!):
Z = 1 = Z1 Z2 .
Y Z1 + Z2
(7.71)
Z1
Z = Z1 Z2
Z1 + Z2
Z2
Figura 7.24: parallelo di impedenze.
Anche il caso di N impedenze in parallelo è molto simile alle cose che avete
appreso nello studio del regime stazionario, potendosi scrivere che l’ammettenza
equivalente è pari alla somma delle ammettenze che compongono il parallelo:
Y = Y1 + Y2 +
+ YN .
Esempio 3 - Determinare l’impedenza equivalente vista dai morsetti A-B.
(7.72)
125 - Circuiti elettrici in evoluzione dinamica
Z1 = 1 + j
Z3 = 2 + 3 j
A
B
Z2 = 1 - j
Cominciamo coll’osservare che i valori delle resistenze e delle reattanze si
ritengono espressi in ohm, e che le due impedenze Z 1 e Z 2 sono in parallelo.
Pertanto, posto
Z 1 = 1 + j = 2 ∠π/4 = 2, π/4 e Z 2 = 1 - j = 2 ∠- π/4 = 2, - π/4 ,
l’impedenza equivalente a queste due vale:
Z = Z1 Z2 =
Z1 + Z2
2 , π/4 2 , - π/4
=
1+j+1-j
2
2 , π/4 - π/4
2, 0 2
=
= =1.
2
2
2
Ora, l’impedenza Z è in serie con Z 3 e, allora, l’impedenza vista dai morsetti A e
B vale:
Z AB = Z + Z 3 = 1 + 2 + 3 j = 3 + 3 j .
Esempio 4 - Determinare l’impedenza supponendo che la rete funzioni alla
pulsazione ω = 1 krad/s.
L 1 = 1 mH
A
C = 1 mF
B
R=3Ω
L 2 = 2 mH
126 - Circuiti elettrici in evoluzione dinamica
Le reattanze relative a ogni bipolo a memoria valgono:
X1 = ω L 1 = 1 Ω , X2 = ω L 2 = 2 Ω , XC = 1 = 1 Ω .
ωC
Poi, eseguendo il parallelo tra le impedenze relative a C e a L 2, si ha:
Z=
2
j X 2 - j XC
=- 2jj =-2j =-2j.
j X 2 - j XC
2j-j
j
Il risultato, dunque, di questo parallelo è una impedenza che corrisponde ad una
capacità (di reattanza 2). Ora, l’impedenza Z è in serie con la resistenza R e con la
reattanza X1, sicché:
Z AB = R + j X1 + Z = 3 + j - 2 j = 3 - j .
In gergo si dice che l’impedenza Z AB, avendo una parte immaginaria negativa, ha
un ‘carattere’ ohmico-capacitivo.
Abbiamo appena visto che valgono le stesse regole del regime stazionario per il
calcolo delle impedenze in serie e in parallelo. In maniera naturale, le regole del
partitore di tensione e di corrente continuano a valere: l’esempio che segue ha lo
scopo di mostrarvi come si adoperino in regime sinusoidale. Tra l’altro, può
essere utilmente adoperato per fare ulteriore pratica sui numeri complessi.
Esempio 5 - Consideriamo la rete mostrata in figura. Essa opera in regime
sinusoidale e, per questo, abbiamo riportato il valore del generatore di tensione
nella forma di fasore. Si assuma: E = (3 - j) V, R = 1 Ω, XC = 1 Ω.
I
R
A
IC
+
R
E
−
IR
B
1) Determinare la tensione VAB e la corrente I.
XC
127 - Circuiti elettrici in evoluzione dinamica
Prima di valutare la tensione richiesta, semplifichiamo la rete come mostrato nella
figura che segue, in cui l’impedenza Z rappresenta il parallelo tra R e XC:
1 ∠- π/2
Z = R || (- j XC) = - j R XC = - j =
= 1 ∠- π/4 =
R - j XC
1-j
2 ∠- π/4
2
= 1 cos π - j sen π = 1
4
4
2
2
1 - j =1-j.
2
2
2
I
R
A
+
+
E
Z
−
VAB
−
B
La tensione VAB può essere calcolata usando la regola del partitore di tensione:
1-j
2
VAB = E Z = (3 - j)
= (3 - j) 1 - j = 1 - j .
3-j
R+Z
1+1-j
2
Allora la corrente I può essere calcolata applicando la LKT all’unica maglia
(percorsa, come d’abitudine, in senso orario):
- E + R I + VAB = 0 → I = E - VAB = 3 - j - (1 - j) = 2 .
R
2) Calcolare le correnti IR e IC.
Adoperiamo la regola del partitore di corrente.
128 - Circuiti elettrici in evoluzione dinamica
I
A
IC
R
XC
IR
B
Risulta (come suggerito dalla figura precedente):
1, - π/2
IR = I - j XC = 2 - j = 2
=2 1 ,-π = 2
R - j XC
1-j
4
2 , - π/4
2
2
IC = I
R
=2 1 =2
R - j XC
1-j
1, 0
=2 1 ,π = 2
2 , - π/4
2 4
2
1 - j =1-j;
2
2
1 + j =1+j.
2
2
Quale verifica dei calcoli sviluppati, controllate che la LKC al nodo A
IR + IC - I = 0 ,
risulta verificata con i valori calcolati delle correnti. Infine, controllate che
avremmo potuto calcolare le correnti IR e IC per mezzo delle relazioni:
IR = VAB e IC = VAB .
R
- j XC
Anche la trasformazione triangolo stella (o quella stella-triangolo) di impedenze
può essere utilizzata in regime sinusoidale e le formule di trasformazione si usano
proprio come mostrato in regime stazionario. Prima però di mostrare qualche
esempio, ricordiamo le formule generali di trasformazione di un triangolo in una
stella e quelle inverse, di trasformazione di una stella in un triangolo:
129 - Circuiti elettrici in evoluzione dinamica
ZA =
Z AB Z AC
,
Z AB + Z AC + Z BC
Z AB = Z A Z B + Z B Z C + Z A Z C ,
ZC
ZB =
Z AB Z BC
,
Z AB + Z AC + Z BC
Z BC = Z A Z B + Z B Z C + Z A Z C ,
ZA
ZC =
Z AC Z BC
,
Z AB + Z AC + Z BC
Z AC = Z A Z B + Z B Z C + Z A Z C .
ZB
A
(7.73)
A
ZA
Z AB
B
Z AC
B
O
ZB
Z BC
C
C
ZC
Figura 7.25: triangolo e stella di impedenze.
Esempio 6 - Calcolare l’impedenza vista dai terminali A-B del bipolo mostrato
in figura, assumendo R = 6 Ω, XL = 4 Ω e XC = 4 Ω.
XL
R
R
A
R
XC
B
Per trovare l’impedenza equivalente vista dai terminali A-B si potrebbe procedere
in diversi modi; noi riteniamo che la via più semplice sia quella di trasformare il
130 - Circuiti elettrici in evoluzione dinamica
triangolo di resistenze in una stella. Successivamente, semplici operazioni di serie
e parallelo ci consentiranno di calcolare la richiesta impedenza.
Se facciamo riferimento allo schema riportato di seguito, possiamo affermare che,
dopo aver effettuato l’operazione di trasformazione del triangolo in stella, deve
essere
R + j XL R - j XC
R2 - j2 XL XC + j R XL - j R XC
3
3
3
Z AB = R + 3
=R+ 9
=
3
2R + j XL - XC
3
2R + j XL - XC
3
3
R2 + X L XC + j R XL - XC
3
=R+ 9
.
3
2R + j XL - XC
3
Avete notato come abbiamo eseguito la moltiplicazione tra due numeri complessi?
Siamo abituati a trasformare i fattori in forma polare e poi eseguire la
moltiplicazione; per sviluppare il calcolo precedente, abbiamo moltiplicato due
numeri complessi usando le regole algebriche cui siete abituati e osservando che,
per definizione, è j2 = - 1, risulta:
(a + j b) (c + j d) = ac + j bc + j ad + j2 bd = ac - bd + j (bc + ad) .
R
3
A
XL
R
3
B
R
3
XC
Se poi osserviamo che XL = X C, l’espressione precedente si semplifica come segue:
R2 + X L XC
Z AB = R + 9
= 2 + 4 + 16 = 7 .
3
2R
4
3
131 - Circuiti elettrici in evoluzione dinamica
Tuttavia, qualcosa di nuovo, forse anche un po’ strano e imbarazzante, può
accadere in regime sinusoidale. L’esempio che segue analizza questa novità e
fornisce una chiave di lettura dei risultati ottenuti.
Esempio 7 - Trasformare la stella di impedenze in un triangolo, assumendo che
R = 10 Ω, XL = 2 Ω e XC = 4 Ω.
R
XC
A
C
B
XL
Applicando le formule di trasformazione della stella in un triangolo, concludiamo
rapidamente che deve essere
Z AB =
XL XC + j R XL - XC
= R 1 - XL + j XL = 5 + 2 j ,
- j XC
XC
Z BC =
XL XC + j R XL - XC XL XC
=
+ j XL - XC = 0.8 - 2 j ,
R
R
Z AC =
XL XC + j R XL - XC
= R 1 - XC - j XC = - 10 - 4 j .
j XL
XL
Osservando con attenzione i risultati ottenuti, peraltro evidenziati nella figura che
segue, si nota che l’impedenza Z AC ha una parte reale negativa pari a - 10 Ω.
Questo fatto non deve turbarci più di tanto dato che le trasformazioni imposte ci
dicono che se chiudiamo in una scatola i due elementi a tre morsetti, quello a stella
e quello a triangolo, non sono distinguibili per mezzo di esperimenti eseguiti
dall’esterno di questa scatola. Il secondo ha in un ramo una resistenza negativa che
nei corsi di Elettronica imparerete a realizzare. Ci basti qui sottolineare che una
resistenza negativa, fatta ovviamente su essa la convenzione dell’utilizzatore, si
comporta come un generatore.
132 - Circuiti elettrici in evoluzione dinamica
- 10
A
4
5
C
2
2
0.8
B
7.6 Il circuito RLC
Continuiamo la nostra analisi del regime sinusoidale, esaminando circuiti più
complicati. In questo paragrafo esamineremo, in qualche dettaglio, il circuito
RLC, costituito da tre elementi in serie, alimentati da un generatore di tensione, e
mostrato in Figura 7.26.
1
+
vR(t)
+
R
−
C
−
2
+
e(t)
L
0
−
vL(t)
−
+
i(t) 3
vC(t)
Figura 7.26: circuito RLC serie.
Supponiamo che il generatore di tensione eroghi la tensione sinusoidale
e(t) = EM 2 sen(ωt + α) ,
che può essere rappresentata dal fasore
133 - Circuiti elettrici in evoluzione dinamica
E = E M ∠α = E M , α .
Dopo avere eseguito le normali operazioni di rito sulle tensioni e correnti relative
a ciascun bipolo, possiamo scrivere la LKT all’unica maglia che costituisce la rete:
- e(t) + vR(t) + vL(t) + vC(t) = 0 .
Ora, detto I il fasore che rappresenta la corrente che attraversa le tre impedenze,
quest’ultima relazione, introducendo le caratteristiche dei diversi bipoli, diventa:
- E + R I + j XL I - j XC I = 0 → I =
E
=E,
R + j XL - XC Z
(7.74)
in cui, abbiamo chiamato con
Z = R + j XL - XC =
R2 + XL - XC
2
,ϕ
(7.75)
l’impedenza ‘vista’ dal generatore e, come al solito, abbiamo introdotto le due
reattanze
XL = ω L e XC = 1 .
ωC
Inoltre, la fase ϕ dell’impedenza, definita come la differenza tra la fase di E e
quella di I (fase del rapporto di due numeri complessi), vale:
ϕ = arctan XL - XC .
R
(7.76)
Ora, la funzione arcotangente è positiva se l’argomento è positivo, negativa in caso
contrario. Potete convincervi di ciò adoperando la calcolatrice e calcolando
l’arcotangente una volta per un numero positivo, un’altra per un numero negativo;
se non siete sufficientemente convinti, ripetete questo esperimento numerico più
volte. Ciò comporta che
se XL > XC , allora ϕ > 0 ; mentre se XL < XC , allora ϕ < 0 .
Il diagramma vettoriale del circuito RLC serie è molto semplice: si comincia col
disegnare il vettore rappresentativo della corrente. La somma della caduta di
134 - Circuiti elettrici in evoluzione dinamica
tensione resistiva R I, in fase con la corrente, di quella induttiva j XL I, sfasata di
90° in anticipo, e di quella capacitiva - j XC I, sfasata di 90° in ritardo, fornisce il
vettore rappresentativo della tensione del generatore.
È immediato, a questo punto, determinare graficamente lo sfasamento ϕ fra
tensione e corrente. Se supponiamo (Figura 7.27a) che il modulo della caduta
induttiva sia maggiore del modulo della caduta capacitiva, la corrente è sfasata in
ritardo rispetto alla tensione (carico prevalentemente induttivo, ϕ > 0).
Naturalmente, se accade l’inverso (Figura 7.27b), la corrente è sfasata in anticipo
(carico prevalentemente capacitivo, ϕ < 0).
VL = j XL I
VL = j XL I
VR = R I
E
I
ϕ<0
ϕ>0
I
E
VR = R I
VC = - j XC I
(a)
VC = - j XC I
(b)
Figura 7.27: diagramma fasoriale del circuito RLC con un carico di tipo
ohmico-induttivo (a) e ohmico-capacitivo (b).
Resta da esaminare l’ultimo caso, quello in cui XL = XC. In tal caso il diagramma
vettoriale assume la caratteristica forma descritta in Figura 7.28. In pratica, le
cadute induttive e capacitive si compensano reciprocamente con il risultato che, al
generatore, il carico appare puramente resistivo. L’impedenza complessiva si
riduce alla sola resistenza e possiede, quindi, soltanto la parte reale.
È questo il fenomeno della risonanza che esamineremo in dettaglio nel prossimo
capitolo.
135 - Circuiti elettrici in evoluzione dinamica
VL = j XL I
E = VR = R I
I
ϕ=0
VC = - j XC I
Figura 7.28: diagramma fasoriale del circuito RLC in condizioni di risonanza.
Esempio 8 - Un circuito RLC serie, alimentato da una tensione sinusoidale
e(t) = EM 2 sen(ωt), con E M = 5 V e ω = 1 krad/s, è costituito da un resistore
R = 1 Ω, da un induttore L = 2 mH e da un condensatore C = 1 mF. Determinare
la corrente che attraversa il circuito.
Cominciamo a rappresentare il generatore di tensione con il fasore
E = EM = 5 V ,
ed a valutare le due reattanze
XL = ω L = 2 Ω , XC = 1 = 1 Ω .
ωC
L’impedenza vista dal generatore vale
Z = R + j XL - XC = 1 + j (2 - 1) = 1 + j =
2 ,π .
4
Essendo la fase dell’impedenza positiva, concludiamo subito che si tratta di un
carico di tipo ohmico-induttivo. Pertanto, la corrente risulta pari a
I=
E
= 5 =
R + j XL - XC 1 + j
5, 0
= 5 ,-π ,
4
2 , π/4
2
che è rappresentata dalla funzione sinusoidale
i(t) = 5 sen 1000 t - π .
4
136 - Circuiti elettrici in evoluzione dinamica
Come al solito, potete controllare il risultato adoperando il simulatore Spice, per
mezzo delle istruzioni che seguono.
Esempio 8
* Circuito RLC serie
R1
1
2
1
L1
2
3
2m
C1
3
0
1m
VE
1
0
AC
7.071 -90
.AC LIN
1
159.15
159.15
.PRINT AC
VM(1,2) VP(1,2)
.END
Ricordate che Spice usa la funzione coseno per rappresentare i generatori e,
pertanto, il nostro generatore va rappresentato come
e(t) = E M 2 sen(ωt) = E M 2 cos ωt - π .
2
Anche la corrente verrà rappresentata sotto forma di coseno:
i(t) = 5 sen 1000 t - π = 5 sen 1000 t - 3 π + π = 5 cos 1000 t - 3 π .
4
4
2
4
Provate ora a risolvere da soli lo stesso circuito, usando per il condensatore due
diversi valori: C = 1/3 mF e C = 1/2 mF. Troverete i risultati che vi riassumiamo
nella tabella che segue.
C mF
1/3
1/2
XL Ω
2
2
XC Ω
3
2
i(t) A
5 sen(1000 t - π/4)
5 2 sen(1000 t)
Prima di terminare questo paragrafo, vogliamo sottolineare che le stesse cose dette
per il circuito RLC serie si possono adattare per quello parallelo, mostrato in
Figura 7.29.
137 - Circuiti elettrici in evoluzione dinamica
1
+
j(t)
R
v(t)
L
C
−
0
Figura 7.29: circuito RLC parallelo.
Notate che questa volta, invece di un generatore di tensione, la rete è alimentata da
un generatore di corrente. Provate da soli a calcolare la tensione v(t) ai capi del
generatore, usando gli stessi valori numerici per L e C dell’esempio appena svolto.
In questo caso, per risolvere la rete, basta semplicemente calcolare l’ammettenza
vista dal generatore:
Y=G+jB= 1 + 1 - 1 = 1 +j 1 - 1 .
R j XL j XC R
XC XL
(7.77)
Infine, controllate i risultati per mezzo di Spice.
7.7 Strumenti in corrente alternata
Gli strumenti in corrente alternata si usano come quelli in corrente continua con la
sola differenza che essi misurano non il valore istantaneo della grandezza
sinusoidale, ma il suo valore efficace. Così, un voltmetro che, operando in regime
sinusoidale, deve misurare la tensione
v(t) = 8 2 sen(500 t + π/6) ,
fornirà sul suo quadrante (o display) l’indicazione
V0 = 8 V .
Per essere quanto più possibile chiari, consideriamo la porzione di rete mostrata in
Figura 7.30: nel nodo N convergono tre rami e le correnti che interessano ciascun
lato soddisfano la LKC al nodo. Ammettiamo che esse valgano:
138 - Circuiti elettrici in evoluzione dinamica
i1(t) = 5 2 sen(ωt) , i2(t) = 5 2 sen(ωt + π/2) , i3(t) = 10 sen(ωt - π/4) .
Queste correnti possono essere anche rappresentate dai tre fasori:
I1 = 5 , I2 = 5 , π = 5 cos π + 5 j sen π = 5 j ,
2
2
2
i2(t)
I3 = 10 , - π = 5 - 5 j .
4
2
i2(t)
A
i1(t)
A
N
i1(t)
i3(t)
N
A
i3(t)
Figura 7.30: inserzione di amperometri in regime sinusoidale.
Usando la rappresentazione complessa, è facile convincersi che vale la LKC al
nodo N:
- I1 + I2 + I3 = 0 → I1 = I2 + I3 .
Se, ora, inseriamo tre amperometri come mostrato in Figura 7.30, essi ci
forniranno le indicazioni dei tre valori efficaci
I1 = 5 ,
I2 = 5 ,
I3 = 10 = 5 2 ,
2
che non verificano la LKC al nodo, dato che il valore efficace della somma non
coincide con la somma dei valori efficaci
I1 ≠ I2 + I3 .
Allora fate attenzione: le LK non valgono per i valori efficaci, esse valgono per le
grandezze sinusoidali, oppure per i fasori. Sottolineiamo ciò poiché gli strumenti
di misura delle tensioni e delle correnti in regime sinusoidale forniscono soltanto
l’indicazione del valore efficace della grandezza da misurare.
Ancora una osservazione prima di terminare il paragrafo. Guardate con attenzione
la Figura 7.30: l’amperometro (ma la stessa cosa potrebbe dirsi per un voltmetro)
ha perduto, rispetto agli strumenti che abbiamo utilizzato in regime stazionario,
139 - Circuiti elettrici in evoluzione dinamica
l’indicazione della polarità. Se rivisitate un esempio svolto, noterete che
l’amperometro aveva, vicino a uno dei suoi terminali, un segno ‘+’. In regime
sinusoidale, l’indicazione di questo segno è superflua dato che lo strumento
fornisce l’indicazione del valore efficace, che è una quantità positiva, e, pertanto,
viene omessa negli schemi.
Nel prossimo paragrafo, dopo aver introdotto la potenza in regime sinusoidale,
studieremo lo strumento che misura la cosiddetta potenza attiva: il wattmetro. In
altri termini, questo nuovo strumento ci fornirà quella indicazione sulla fase che,
al momento, abbiamo perduto.
7.8 Potenze in regime sinusoidale
Per parlare compiutamente delle potenze in regime sinusoidale, cominciamo a
ricordare la definizione di potenza istantanea. Considerato un bipolo e fatto su
esso, ad esempio, la convenzione dell’utilizzatore, chiameremo potenza istantanea
il prodotto:
p(t) = v(t) i(t) .
(7.78)
Ora, dato che il bipolo funziona in regime sinusoidale, la tensione e la corrente
saranno rappresentate da due sinusoidi con la stessa pulsazione e sfasate di un certo
angolo che, per generalità, indicheremo con ϕ. In tal modo, possiamo scrivere:
v(t) = V 2 sen(ωt + ϕ) e i(t) = I 2 sen(ωt) ,
essendo, rispettivamente, V e I, i valori efficaci della tensione e della corrente e ϕ
la fase della tensione, avendo supposto la corrente a fase nulla. In termini di fasori
possiamo scrivere:
V= V,ϕ , I= I,0 .
Per rendere più concrete le idee, supponiamo che la tensione V agisca su
un’impedenza Z, di modo che
V,ϕ
Z=V=
= V,ϕ ,
I
,
0
I
I
(7.79)
140 - Circuiti elettrici in evoluzione dinamica
in cui la fase ϕ coincide pure con la fase dell’impedenza. Come abbiamo già
evidenziato in precedenza, può accadere che questa fase ϕ sia:
• positiva, e in tal caso la corrente è in ritardo rispetto alla tensione e il bipolo
avrà un carattere ohmico-induttivo;
• negativa, e in tal caso la corrente è in anticipo rispetto alla tensione e il bipolo
avrà un carattere ohmico-capacitivo;
• nulla, e in tal caso la corrente è in fase rispetto alla tensione e il bipolo avrà un
carattere puramente ohmico.
Comunque sia, la potenza istantanea (7.78) vale:
p(t) = 2 V I sen(ωt + ϕ) sen(ωt) .
(7.80)
Ora, se consultate l’appendice trigonometrica posta alla fine di questo capitolo,
scoprirete che il prodotto di due seni può scriversi nella forma equivalente:
cos(α - β) - cos(α + β) = 2 sen α sen β .
Allora, la formula (7.80) diventa:
sen(ωt + ϕ) sen(ωt) = 1 cos ϕ - cos(2ωt + ϕ) .
2
(7.81)
Sostituendo la (7.81) nella (7.80), otteniamo:
p(t) = V I cos ϕ - V I cos(2ωt + ϕ) .
(7.82)
141 - Circuiti elettrici in evoluzione dinamica
p(t)/(VI)
2
1.5
1
0.5
ωt
0
ϕ=π
3
-0.5
-1
0
1
2
3
4
5
6
7
Figura 7.31: andamento temporale della potenza istantanea.
In altri termini, la potenza istantanea, in regime sinusoidale, è la somma di un
termine costante, pari al prodotto del valore efficace della tensione per il valore
efficace della corrente per il coseno dell’angolo ϕ tra i due fasori, più un termine
oscillante di pulsazione 2ω.
La Figura 7.31 illustra chiaramente quanto detto nel caso particolare ϕ = π/3
cos ϕ = 0.5 : in essa abbiamo rappresentato la potenza istantanea (normalizzata al
fattore V I) al variare del tempo (più precisamente della variabile adimensionale
ωt). Il primo termine della formula (7.82), V I cos ϕ, è rappresentato dalla linea
tratteggiata (che nel disegno è una costante pari a 0.5). Il secondo è una funzione
sinusoidale, di pulsazione 2ω, che, come potete rendervene conto osservando con
attenzione la Figura 7.31, oscilla un po’ al di sopra, un po’ al di sotto della
costante 0.5: più precisamente, in un periodo
T = 2π
ω ,
esso compie due oscillazioni complete, essendo il suo periodo pari a
π =T.
T * = 2π = ω
2ω
2
142 - Circuiti elettrici in evoluzione dinamica
Questo termine oscillante ha valor medio nullo. Per comprendere fino in fondo il
significato di questa affermazione, sempre nel caso particolare ϕ = π/3, facciamo
un grafico della sola parte oscillante.
1.5
cos(2ωt + ϕ)
1
+
0.5
0
ωt
−
-0.5
ϕ=π
3
-1
-1.5
0
1
2
3
4
5
6
7
Figura 7.32: andamento temporale del solo termine oscillante.
In un periodo T, esso compie due oscillazioni complete, e le semionde negative
sono uguali a quelle positive: l’area netta sottesa da un’onda completa è, dunque,
nulla:
T
cos(2ωt + ϕ) dt = 0 .
(7.83)
0
Detta a(t) una qualsiasi grandezza periodica (di periodo T), si definisce valor
medio il seguente integrale:
T
valor medio = 1
T
a(t) dt .
0
(7.84)
143 - Circuiti elettrici in evoluzione dinamica
Il valor medio di una grandezza sinusoidale (che noi abbiamo chiamato alternata) è
pari a zero poiché, in un periodo, le semionde positive descrivono un’area uguale
ed opposta a quella delle semionde negative.
Allora, la potenza media, detta anche potenza attiva, indicata con P, sarà:
T
P=1
T
0
T
p(t) dt = V I
T
cos ϕ - cos(2ωt + ϕ) dt = V I cos ϕ .
(7.85)
0
La (7.85) è conosciuta in letteratura come formula di Ferraris. Notate che il
secondo termine nell’integrale (7.85), essendo a valor medio nullo, non
contribuisce all’integrale per quanto detto in precedenza. La potenza attiva è
sempre positiva dato tale è il coseno, nell’intervallo - π/2 ≤ ϕ ≤ π/2.
Il fattore cos ϕ viene detto fattore di potenza.
In effetti, il valore della potenza media (P) consente di calcolare agevolmente la
quantità di energia (E), assorbita in un intervallo di tempo pari proprio al periodo
T, come il prodotto della potenza media per l’intervallo stesso: E = P T.
Come è lecito attendersi, la potenza attiva si misura in watt, o nei suoi multipli e
sottomultipli. Ci aspettiamo, pure, che per la potenza media valga, così come per
l’energia, un teorema di conservazione: la potenza attiva fornita dai generatori
deve essere eguale a quella utilizzata dagli utilizzatori.
Torna utile introdurre anche la cosiddetta potenza reattiva, indicata con Q, e
definita dalla relazione:
Q = V I sen ϕ .
(7.86)
Per la misura della potenze reattiva si usa una nuova unità: il volt-ampere-reattivo
(simbolo VAr). In realtà, nella introduzione di questa nuova unità di misura per la
potenza reattiva, non vi è nulla di magico: si tratta soltanto di un nuovo nome,
adoperato per distinguere le potenze attive da quelle reattive. Badate bene, però,
che, a differenza di quella attiva, la potenza reattiva può essere sia positiva che
negativa poiché il seno, nell’intervallo - π/2 ≤ ϕ ≤ π/2, cambia segno.
Anche la potenza reattiva si conserva. Pertanto, la potenza reattiva erogata dai
generatori presenti nella rete è uguale a quella assorbita dalle diverse impedenze
che costituiscono il circuito. Il fatto che la potenza reattiva sia una grandezza che
144 - Circuiti elettrici in evoluzione dinamica
si conservi può essere di grande utilità nella risoluzione delle reti. Si consideri,
per esempio, il caso di due carichi in parallelo di cui siano note le potenze attive e
reattive assorbite da ognuno di essi; si può affermare che il complesso dei due
carichi è equivalente ad un unico carico che assorbe una potenza attiva e reattiva
che sono la somma algebrica (la potenza reattiva può essere negativa!) delle
rispettive potenze dei singoli carichi.
Come vedremo meglio quando studieremo i campi elettrici e magnetici, una
potenza reattiva non nulla in una rete è indubbiamente indice della presenza di
energie immagazzinate associate al campo elettrico o al campo magnetico.
In un resistore, la potenza reattiva assorbita è evidentemente nulla, mentre diversa
da zero è la potenza attiva che è pari a VI, dato che cos ϕ = 1.
Per l’induttore ed il condensatore, invece, la potenza attiva assorbita è nulla,
essendo cos ϕ = 0; le potenze, invece, reattive valgono rispettivamente VI e - VI.
La Tabella che segue riassume, per un resistore, induttore e condensatore, i valori
di potenza attiva e reattiva.
Bipolo
ϕ
Resistore
0
Induttore
π/2
Condensatore - π/2
Potenza attiva P [W]
VI
0
0
Potenza reattiva Q [VAr]
0
VI
-VI
Per valutare simultaneamente la potenza attiva e reattiva relative a un bipolo, è
utile introdurre una potenza complessa, che noi indicheremo con P, definita in
maniera tale che la sua parte reale coincida con la potenza attiva, mentre la sua
parte immaginaria sia proprio pari alla potenza reattiva, cioè
P=P+jQ.
(7.87)
Sostituendo nella (7.87) le definizioni di P e Q, essa diventa:
P = P + j Q = V I cos ϕ + j sen ϕ = V I , ϕ .
(7.88)
Sostituendo la (7.79) nella (7.88) e ricordando la definizione di numero complesso
coniugato, otteniamo una nuova semplice rappresentazione della potenza
complessa:
145 - Circuiti elettrici in evoluzione dinamica
*
VI = V,ϕ I,0 = VI,ϕ =A =P+jQ,
(7.89)
in cui abbiamo indicato con ϕ la fase della tensione ed abbiamo supposto la
corrente a fase nulla come abbiamo fatto sin dall’inizio di questo paragrafo (ma la
formula ottenuta è generale). Da questa ultima formula, poi, se ne può ricavare
immediatamente un’altra assai comoda. Se ricordiamo che V = Z I per una
generica impedenza Z e consideriamo che il prodotto tra un numero complesso e il
suo coniugato è pari al modulo al quadrato del numero stesso, la (7.89) diventa
*
*
P = V I = Z I I = Z I2 ,
(7.90a)
cioè la potenza complessa è pari al prodotto del numero reale I2, per la quantità
complessa Z. In maniera simile possiamo scrivere che
*
P=V I =V V
Z
*
*
2
=VV = V .
*
*
Z
Z
(7.90b)
Separando la parte reale da quella immaginaria nella (7.90a) e supponendo che
Z = R ± j X, otteniamo due ‘comode’ formule per la potenza attiva e per quella
reattiva assorbite da un bipolo:
P = R I 2 e Q = ± X I2 .
Dato che, come sottolineato in precedenza, sia la potenza attiva, sia quella reattiva
si conservano, allora anche la potenza complessa si conserva: le potenze complesse
erogate dai generatori sono, pertanto, pari a quelle assorbite dai carichi.
Le formule (7.90) mostrano che, anche nel calcolo delle potenze, tra corrente
continua e corrente alternata esiste uno stretto legame. E sarà proprio questo
legame a fornirci una maniera per interpretare in termini fisici il valore efficace
di una grandezza sinusoidale. Consideriamo un resistore R che, in corrente
continua, sia attraversato da una corrente di valore I. Come sappiamo, la potenza
P = R I2 assorbita dal resistore si trasforma in calore per effetto Joule. Se, invece,
lo stesso resistore funziona in regime sinusoidale, valendo formalmente la stessa
relazione in cui, però, I rappresenta il valore efficace, possiamo concludere che il
valore efficace rappresenta il valore che ha una corrente continua che, circolando
nello stesso resistore, genera, per effetto Joule, la stessa quantità di calore.
146 - Circuiti elettrici in evoluzione dinamica
Infine, è abitudine diffusa indicare il prodotto VI col nome di potenza apparente,
A, che si misura in volt-ampere. Si noti che tra le tre potenze, attiva P, reattiva Q
ed apparente A, sussiste la relazione:
|P| =
P2 + Q 2 .
Tale relazione può utilmente essere rappresentata graficamente nel cosiddetto
triangolo delle potenze, che mostra l’interessante relazione, che più volte
adopereremo nel seguito:
Q = V I sen ϕ = V I cos ϕ sen ϕ = P tg ϕ .
cos ϕ
(7.91)
|P| = P2 + Q2
Q
ϕ
P
Figura 7.33: triangolo delle potenze.
Si badi bene che, in generale le potenze apparenti non si conservano.
Esempio 9 - La rete mostrata in figura opera in regime sinusoidale. Risolvere la
rete e determinare le potenze attive, reattive e apparenti assorbite dai singoli
bipoli e quelle erogate dal generatore. Infine si verifichino i teoremi di
conservazione.
C
1
+
2
iG(t)
+
e(t)
R
−
v0(t)
−
i(t)
0
j(t)
147 - Circuiti elettrici in evoluzione dinamica
Assumiamo che e(t) = E 2 sen(ωt), j(t) = - I 2 cos(ωt), E = 10 V, I = 2 mA,
ω = 200 rad/s, R = 5 kΩ, C = 1 µF.
Cominciamo a calcolare la reattanza
1
XC = 1 =
= 5 kΩ ,
ω C 200 10-6
e a introdurre i fasori che rappresentano i due generatori
e(t) = E 2 sen(ωt) → E = E ;
j(t) = - I 2 cos(ωt) = I 2 sen(ωt - π/2) → J = I, - π/2 = - j I .
Le LK applicate, rispettivamente al nodo 2 e alla maglia formata dal generatore di
tensione, dal condensatore e dal resistore, sono sufficienti a risolvere la rete:
I - J - IG = 0
nodo 2 ,
- E - j XC IG + R I = 0
maglia E - XC - R .
Risolvendo questo sistema di due equazioni complesso, otteniamo immediatamente:
I = E - j XC J = 0 , IG = E - R J = 0.002 j .
R - j XC
R - j XC
Pertanto, le potenze complesse erogate dai due generatori valgono:
PE = E IG* = - 0.02 j , PJ = V0 J * = 0 .
Invece le potenze assorbite dal condensatore e dal resistore valgono:
PC = - j XC I2G = - 0.02 j , PR = R I2 = 0 .
Ora, si verifica facilmente la conservazione delle potenze complesse
PE + PJ = PC + PR ,
che, come detto in precedenza, comporta la conservazione delle potenze attive e
reattive.
148 - Circuiti elettrici in evoluzione dinamica
Continuate da soli a lavorare sull’idea della conservazione delle potenze in regime
sinusoidale adoperando il file Spice, qui di seguito riportato. Notate che per i
valori massimi della tensione e della corrente dei due generatori e per la frequenza
di lavoro sono state introdotte i seguenti valori approssimati:
E 2 ≅ 14.142 V , I 2 ≅ 2.8284 mA , f = ω ≅ 31.83 Hz .
2π
Cambiate i valori di resistenza e capacità, risolvete ‘a mano’ l’esercizio, controllate
i risultati con il codice riportato (opportunamente adattato ai nuovi dati), e, infine,
verificate che le potenze complesse si conservano.
L’istruzione
.PRINT AC
VM(1)
VM(2)
richiede la stampa nel file di uscita dei moduli delle sue tensioni V1 e V2 (sempre
riferite al potenziale di riferimento).
Esempio 9
*Conservazione delle potenze
C0
1
2
1u
R0
2
0
5k
VE
1
0
AC
14.142
-90
IJ
0
2
AC
2.8284m 180
.AC
LIN
1
31.83
31.83
.PRINT AC
VM(1)
VM(2)
.END
Controllate con cura i risultati ottenuti nel file di uscita; il modulo VM(2) non è
rigorosamente nullo, a causa dei dati approssimati che abbiamo immesso, ma
quasi!
Ancora due relazioni che ci torneranno più volte utili nel seguito.
Consideriamo un condensatore. Come sappiamo, esso assorbe una potenza reattiva
pari a
2
QC = - V = - ω C V2 .
XC
149 - Circuiti elettrici in evoluzione dinamica
Ora, la quantità C V2 rappresenta il valore massimo dell’energia elettrica
immagazzinata dal condensatore. Nel Capitolo 6, infatti, abbiamo visto che
l’energia immagazzinata in un condensatore vale (α è la fase, peraltro generica,
della tensione):
UC(t) = 1 C v2(t) = 1 C 2 V2 sen2(ωt + α) .
2
2
Come per la funzione seno, anche la funzione seno al quadrato assume un valore
massimo che è pari ad uno. Allora, il valore massimo di energia è dato da
UC-max = C V2 ,
ed allora
2
QC = - V = - ω C V2 = - ω UC-max .
XC
Quest’ultima relazione mostra che la potenza reattiva assorbita da un condensatore
è proporzionale al massimo valore di energia immagazzinata.
In maniera simile, per un induttore, si potrà scrivere:
QL = ω L I2 = ω UL-max ,
e la potenza reattiva assorbita da un induttore è proporzionale massimo valore di
energia immagazzinata.
Vale la pena notare, a conclusione di questo lungo paragrafo, che la misura della
potenza attiva P può essere realizzata per mezzo di un wattmetro. Nel primo
capitolo abbiamo mostrato come questo strumento a quattro morsetti si inserisca
su un carico per misurarne la potenza. Per la verità, in quella sede, dicemmo che
il wattmetro misurava la potenza istantanea; questa affermazione non è del tutto
corretta dato che, per motivi che saranno chiariti più compiutamente quando
studieremo le misure, il dispositivo non riesce a seguire le variazioni istantanee
della p(t) e, pertanto, la misura si attesta sul suo valore medio, cioè la potenza
media.
150 - Circuiti elettrici in evoluzione dinamica
I=5A
+
V
+
+
W
P = R I2 = 1 ⋅ 52 = 25 W
I
Z=1+2j
−
Figura 7.34: inserzione di un wattmetro in corrente alternata.
Per questa ragione, un wattmetro completa le informazioni che ci servivano per
descrivere il comportamento di una assegnata impedenza in corrente alternata,
consentendoci di sapere quanto valga la fase ϕ.
La Figura 7.34 mostra un esempio di inserzione e la susseguente indicazione del
wattmetro. Vi ricordiamo solo che i due morsetti amperometrici andavano
collegati in serie al carico di cui si vuole misurare la potenza attiva, mentre i due
voltmetrici andavano messi in parallelo.
7.9 Esempi
In questo paragrafo non introdurremo alcun concetto nuovo, ma cercheremo di
convincervi che tutte le tecniche di soluzione delle reti in regime stazionario, si
possono applicare, fatte le debite differenze, per le reti in regime sinusoidale.
Faremo ciò per mezzo di alcuni esempi, convinti che essi vi aiuteranno più di
mille parole. Ancora una parola prima di iniziare: anche i generatori controllati si
usano come in regime stazionario. Pertanto, ogni tanto, torneremo a presentarveli.
Come abbiamo visto, a condizione di trasformare tutte le grandezze sinusoidali nei
corrispondenti fasori, si può operare in regime sinusoidale alla stessa maniera in
cui si è operato in regime continuo. Ai concetti di resistenza e di conduttanza dei
bipoli si sostituiscono quelli di impedenza ed ammettenza. Tali grandezze, a
differenza delle precedenti, sono espresse da numeri complessi, e ciò naturalmente
comporterà inizialmente qualche lieve complicazione. Per superarle basta
ricordare le principali operazioni sui numeri complessi.
In generale, possiamo affermare che tutte le proprietà ed i teoremi sulle reti, che
abbiamo studiato in regime stazionario basandoci delle leggi di Kirchhoff, hanno
un loro equivalente in regime sinusoidale in termini di fasori. In particolare, vale
la conservazione delle potenze, che nella sua più generale forma, può esprimersi
151 - Circuiti elettrici in evoluzione dinamica
come legge di conservazione delle potenze complesse, contenendo in se la
conservazione delle potenze attive e quella delle potenze reattive
Per comprendere fino in fondo quanto l’analogia regime stazionario - regime
sinusoidale sia forte, cominciamo con un primo semplice esempio di rete, e
tentiamo di risolverla utilizzando le regole del partitore di tensione o di corrente.
Esempio 10 - La rete rappresentata in figura è a regime. Determinare
l’impedenza vista dal generatore e le correnti iL(t) e iC(t).
2
iL(t)
R
1
+
L
iC(t)
3
e(t)
C
R
−
0
Si assuma che e(t) = E sen(1000 t), E = 10 V, R = 5 Ω, L = 20 mH, C = 0.1 mF.
L’impedenza vista dal generatore è presto calcolata, osservando che il
condensatore C è in parallelo con la serie tra il resistore 2R e l’induttore L.
Pertanto, valutando le reattanze
XL = ω L = 20 Ω e XC = 1 = 10 Ω ,
ωC
si ha immediatamente:
Z = - j XC || 2R + j XL = XL XC - 2 j R XC = 5 - 15 j .
2R + j XL - XC
Per calcolare la corrente che fluisce nel condensatore, non è necessario ricorrere
al metodo simbolico dato che la tensione che insiste ai suoi capi è proprio quella
del generatore e(t), ed allora:
iC(t) = C de(t) = cos(1000t) .
dt
152 - Circuiti elettrici in evoluzione dinamica
Per calcolare la corrente che fluisce nel ramo dell’induttore, ricorrendo ai fasori,
si ha:
e(t) = 10 sen(1000 t) → E = 10 .
2
Risulta allora:
IL =
E
= 10/ 2 =
2R + j XL 10 + 20 j
1 , - arctg 2 .
10
E
63.435°
IL
Come mostra il diagramma fasoriale la corrente IL è in ritardo rispetto alla
tensione E di un angolo pari a α = arctg 2 ≅ 1.107148767 rad ≅ 63.435°.
Tornando alle rappresentazione in termini di funzioni sinusoidali, avremo
iL(t) = 1 sen(1000t - α) = 1 cos 1000t - α - π .
2
5
5
Riflettete sulla rapidità ed efficacia di calcolo consentite dal metodo simbolico, che
ha eliminato le relazioni differenziali dei bipoli a memoria, sostituendole con
relazioni algebriche.
Esempio 10
*Circuito in corrente alternata
R0
1
2
5
R1
3
0
5
L0
2
3
20m
C0
1
0
0.1m
VE
1
0
AC
10
-90
.AC
LIN
1
159.155
.PRINT AC
IM(L0)
IP(L0)
.END
159.155
153 - Circuiti elettrici in evoluzione dinamica
Si noti come l’istruzione
.PRINT AC
IM(L0)
IP(L0)
chiede al compilatore di stampare nel file ‘.OUT’ il modulo e la fase della
corrente che passa per l’induttore L0.
In questo esercizio applicheremo sistematicamente le leggi di Kirchhoff per
risolvere una semplice rete nel dominio dei fasori; si noti la stretta analogia con i
circuiti in regime stazionario.
Esempio 11 - Determinare le correnti che fluiscono nei tre rami della rete
mostrata in figura, sia come fasori che nel dominio del tempo.
C
1
3
R
2
i3(t)
+
e1(t)
+
L
−
e2(t)
i1(t)
i2(t)
−
0
Si assuma che e1(t) = E 2 sen(ωt), e2(t) = - E 2 cos(ωt),
ω = 1 krad/s, R = 5 Ω, L = 5 mH, C = 0.2 mF.
E = 10 V,
Partiamo come al solito dal calcolo delle reattanze:
XL = ω L = 5 Ω e XC = 1 = 5 Ω .
ωC
Poniamo poi:
e1(t) → E 1 = E , e2(t) → E 2 = - j E = - 10 j .
Per stabilire la fase del secondo generatore, si è fatto uso della notevole identità
trigonometrica (vedi l’appendice):
154 - Circuiti elettrici in evoluzione dinamica
- cos α = sen α - π .
2
Applicando le leggi di Kirchhoff nel dominio dei fasori, e adoperando le
convenzioni di segno mostrate in figura, possiamo scrivere:
E 1 = R I1 + j XL I3 ,
E 2 = - j XC I2 + j XL I3 ,
I1 + I2 = I3 ,
ovvero, eliminando la corrente I3 per mezzo della terza equazione:
E 1 = R I 1 + j X L I 1 + I 2 = R + j XL I 1 + j X L I 2 ,
E 2 = - j XC I2 + j XL I1 + I2 = j XL I1 + j XL - XC I2 .
Sostituendo i valori numerici assegnati, e risolvendo il precedente sistema, è facile
ottenere i seguenti valori per i fasori rappresentativi delle tre correnti di lato:
I1 = - 2 = 2 , π ,
I2 = 2 - 4 j = 2 5 , - ϕ , (ϕ = arctg 2 ≅ 1.107)
I3 = - 4 j = 4 , - π ,
2
che, nel dominio del tempo, diventano:
i1(t) = 2 2 sen(1000t + π) ,
i2(t) = 2 10 sen(1000t - ϕ) ,
i3(t) = 4 2 sen(1000t - π/2) .
Operiamo, come d’abitudine, un controllo dei risultati ottenuti per mezzo di Spice.
Esempio 11
*Circuito in alternata
R1
1
3
5
C1
2
3
0.2m
L1
3
0
5m
155 - Circuiti elettrici in evoluzione dinamica
VE1 1
0
AC
14.14
-90
VE2 2
0
AC
14.14 180
.AC LIN 1
159.15
159.15
.PRINT AC
IM(R1)
IP(R1)
.PRINT AC
IM(C1)
IP(C1)
.PRINT AC
IM(L1)
IP(L1)
.END
La risposta di Spice si può condensare nelle sei righe che seguono
FREQ
1.592E+02
IM(R1)
2.828E+00
IP(R1)
9.001E+01
FREQ
1.592E+02
IM(C1)
6.323E+00
IP(C1)
-1.534E+02
FREQ
1.592E+02
IM(L1)
5.656E+00
IP(L1)
-1.800E+02
che (non senza un tantino di trigonometria) ci forniscono risultati in accordo con
quelli che abbiamo trovato ‘a mano’.
Per continuare ad esercitarvi, provate ad ottenere gli stessi risultati adoperando la
sovrapposizione degli effetti, cioè facendo agire, uno per volta, i due generatori di
tensione.
Vediamo, poi, come si applicano i metodi dei potenziali nodali e delle correnti di
maglia.
Esempio 12 - La rete in figura opera in regime sinusoidale. Si determini la
corrente i(t) che fluisce nel condensatore.
156 - Circuiti elettrici in evoluzione dinamica
j(t)
L2
4
L1
3
2
i(t)
R3
R2
C0
0.5 j(t)
0.5 j(t)
5
0
R4
R1
1
Si assuma che j(t) = I 2 cos(ωt), ω = 200 rad/s, I = 2 A, L 1 = L 2 = L = 5 mH,
C0 = 10 mF, R1 = R2 = R3 = R4 = R = 1 Ω.
Questo esercizio verrà risolto sia adoperando il metodo dei potenziali nodali, sia
adoperando quello delle correnti di maglia. Cominciamo, come sempre, col
calcolare le reattanze
XL = ω L = 1 Ω e XC =
1 =1 Ω,
ω C0 2
e i fasori rappresentativi dei generatori (osservate bene la rete: vi sono, ben
nascosti, due generatori indipendenti di corrente)
j(t) = I 2 cos(ωt) → J = I = 2 A .
Potenziali nodali
Scegliamo quale riferimento per i potenziali il nodo 0, ponendo cioè V0 = 0.
Essendo
I1 = V3 - V1 ,
R + j XL
I2 = V3 - V5 ,
R + j XL
I3 = - V1 , I4 = - V5 , I = j V3 ,
R
R
XC
le equazioni ai nodi 1, 2 e 3 diventano:
157 - Circuiti elettrici in evoluzione dinamica
V3 - V1 + V3 - V5 + j V3 = J ,
R + j XL R + j XL
XC
V3 - V5 = 1 J + V5 ,
R + j XL 2
R
V3 - V1 = 1 J + V1 .
R + j XL 2
R
Sostituendo i valori numerici, e risolvendo, potete verificare che la soluzione del
precedente sistema vale:
V1 = - 1 - 1 j ,
2 2
V3 = 1 - 1 j ,
2 2
V3 = - 1 - 1 j .
2 2
Pertanto, la corrente incognita vale
I = 1 + j = 2 , π/4 ,
che, nel dominio del tempo, fornisce il risultato:
i(t) = 2 cos 200t + π .
4
Correnti di maglia
Scegliendo come incognita le due correnti di maglia indicate nella figura seguente,
e scelti (in maniera del tutto arbitraria) i percorsi delle correnti impresse dai
generatori (noi abbiamo diviso la corrente J in due metà, ciascuna passante
attraverso un resistore), possiamo scrivere il seguente sistema:
R + j XL J1 + J/2 + R J1 - j XC J1 + J2 = 0 ,
R + j XL J2 + J/2 + R J2 - j XC J1 + J2 = 0 .
158 - Circuiti elettrici in evoluzione dinamica
J
XL
XL
I
R
J1
J2
R
R
0.5 J
XC
0.5 J
R
Sostituendo i valori numerici e risolvendo, si ha:
J1 = J2 = - 1 - 1 j .
2 2
A questo punto, non è difficile mostrare che la corrente è ancora una volta pari al
risultato ottenuto in precedenza; basta porre:
I = - J1 - J2 .
Esempio 12
*Ancora un circuito in regime sinusoidale
R1
0
1
1
R2
1
2
1
L1
2
3
5m
C0
3
0
10m
L2
3
4
5m
R3
4
5
1
R4
5
0
1
I1
5
3
AC
1.414
0
I2
1
3
AC
1.414
0
.AC LIN
1
31.83
31.83
.PRINT AC
IM(C0)
IP(C0)
.END
Il file Spice riportato dà la possibilità di controllare i risultati trovati ‘a mano’.
159 - Circuiti elettrici in evoluzione dinamica
Infine studiamo gli utilissimi teoremi del generatore equivalente (Thévenin e
Norton).
Esempio 13 - Determinare il circuito equivalente di Thévenin (Norton), visto
dai morsetti A-B, per la rete mostrata in figura.
L
A
+
e(t)
R
−
B
C
Si assuma e(t) = E 2 sen(ωt), E = 100 V, ω = 20 krad/s, R = 10 Ω, L = 1 mH,
C = 5 µF.
Dopo aver valutato le due reattanze
XL = ωL = 20 Ω ,
XC = 1/(ωC) = 10 Ω ,
possiamo valutare l’impedenza equivalente vista dai morsetti A-B quando il
generatore di tensione viene spento:
Z E = R || j XL - XC =
j R XL - XC
= 100 j = 5 (1 + j) .
R + j XL - XC 10 + 10 j
Ponendo poi:
E = E = 100 V ,
la tensione a vuoto può essere calcolata per mezzo di un semplice partitore di
tensione:
E0 = E
R
= 1000 = 50 (1 - j) .
R + j XL - XC 10 (1 + j)
160 - Circuiti elettrici in evoluzione dinamica
Similmente, volendo applicare il teorema di Norton (vedi la figura), si conclude
rapidamente che
I0 =
E
= 100 = - 10 j .
j XL - XC 10 j
XL
A
+
E
R
−
I0
B
XC
Si noti come l’impedenza equivalente, determinata all’inizio di questo esercizio,
poteva essere calcolata anche per mezzo del rapporto:
Z E = E 0 = 50 (1 - j) = 5 (1 + j) .
- 10 j
I0
Terminiamo con un esempio in cui la sovrapposizione degli effetti risulta una
tecnica utilissima per risolvere una rete in cui operano due generatori di
pulsazione differente.
Esempio 14 - La rete mostrata in figura è a regime. Determinare la corrente
i(t).
161 - Circuiti elettrici in evoluzione dinamica
L
i(t)
+
e(t)
C
j(t)
R
−
Si assuma che ω = 1 krad/s, e(t) = E = 10 V, j(t) = J 2 sen(ωt), J = 2 A, R = 2 Ω,
L = 1 mH, C = 0.5 mF.
Nella rete sono presenti due generatori che funzionano a due frequenze diverse: il
generatore di tensione che opera in regime stazionario, erogando una tensione
continua; quello di corrente lavora in corrente alternata. È, pertanto, necessario
applicare la sovrapposizione degli effetti, facendo funzionare un generatore per
volta.
Supponiamo agisca il solo generatore di tensione: dato che l’induttore si comporta
come un corto circuito e il condensatore come un circuito aperto, la rete si
semplifica come di seguito mostrato.
+
e(t)
I0
R
−
Si ha, allora, che la corrente che interessa il resistore vale:
I0 = E = 5 A .
R
Spegniamo ora il generatore di tensione, lasciando in funzione il solo generatore
di corrente. Se poniamo
162 - Circuiti elettrici in evoluzione dinamica
XL = ωL = 1 Ω ,
XC = 1/(ωC) = 2 Ω ,
ed anche
Z = jXL || -jXC =
XL XC = 2 j ,
j XL - XC
indicando con J = J = 2 A il fasore rappresentativo della corrente j(t), la regola del
partitore impone che nel resistore circoli la corrente:
IA = J
Z = 1 + j = 2 , π/4
Z+R
→ iA(t) = 2 sen 1000t + π .
4
L
iA(t)
C
R
j(t)
In definitiva, sovrapponendo i due effetti ed esprimendo le correnti in ampere,
risulta:
i(t) = I0 + iA(t) = 5 + 2 sen 1000t + π .
4
7.10 Doppi bipoli in regime sinusoidale
Tutto quello che abbiamo detto per i doppi bipoli in regime stazionario, vale, pur
di apportare le necessarie modifiche, in regime sinusoidale.
Cominciamo a convincerci che, in presenza dei generatori controllati, potete
adoperare i metodi che avete appreso nel Capitolo 5.
Esempio 15 - Calcolare l’impedenza equivalente vista dai terminali A-B per la
rete mostrata in figura.
163 - Circuiti elettrici in evoluzione dinamica
r i(t)
C
−
+
A
i(t)
L
R
B
Si assuma che R = 30 Ω, L = 0.6 mH, C = 0.4 µF, r = 5 Ω, ω = 100 krad/s.
Iniziamo con il calcolo delle due reattanze
XL = ω L = 60 Ω ,
XC = 1 = 25 Ω .
ωC
Per valutare l’impedenza vista dai due terminali A e B, è necessario alimentare la
rete, ad esempio con un generatore (ovviamente sinusoidale) di tensione
arbitraria, come mostrato in figura.
rI
XC
+
A
+
V0
−
B
−
IL
XL
R
I
Come si vede, siamo passati nel dominio dei fasori, e abbiamo collegato alla rete
un generatore di tensione, rappresentato dal fasore V0. L’impedenza equivalente
vista dai terminali A-B è definita dal rapporto:
Z E = V0 .
I0
Per la linearità della rete, essa non dipende dalla tensione di alimentazione scelta.
Applicando le leggi di Kirchhoff, si ha immediatamente:
164 - Circuiti elettrici in evoluzione dinamica
IL = I0 + I ,
j X L IL = - R I ,
V0 = - j XC I0 + r I + j XL IL .
Eliminando ora la corrente IL, il sistema si riduce a uno di ordine più basso:
j X L I0 + I = - R I ,
V0 = - j XC I0 + r I + j XL I0 + I .
Eliminando la corrente I, si ha:
V0 = - j XC I0 + R - r
j XL I ,
0
R + j XL
di qui, si ricava immediatamente il valore dell’impedenza (espresso in ohm)
Z E = V0 = - j XC + R - r j X L = 20 - 15 j .
R + j XL
I0
Quello che segue è un esercizio riassuntivo, in cui si chiede di calcolare tutte le
caratteristiche di un certo doppio bipolo.
Esempio 16 - Per il doppio bipolo mostrato in figura, determinare le
rappresentazioni in termini di impedenze, ammettenze e ibride.
R0
I1
1
+
I2
+
L
R
C
V1
−
2
V2
−
1'
2'
I1
I2
Si assuma che ω = 1 krad/s, R = 2 Ω, R0 = 2 Ω, L = 2 mH, C = 1 mF.
165 - Circuiti elettrici in evoluzione dinamica
L’induttore e il condensatore possono essere rappresentati alla frequenza di
lavoro, rispettivamente, dalle due reattanze
XL = ω L = 2 Ω e XC = 1 = 1 Ω .
ωC
Iniziamo con il calcolo delle caratteristiche in termini di impedenze
V1 = Z 11 I1 + Z m I2 ,
V2 = Z m I1 + Z 22 I2 .
L’elemento Z 11 rappresenta l’impedenza vista dalla porta 1, quando la seconda
porta è aperta:
Z 11 = V1
I1
.
I2 = 0
Aprendo la porta 2, è facile verificare che
Z 11 = - j XC + R || R0 + j XL = - j XC +
R R0 + j XL
=6-3j.
R + R 0 + j XL 5 5
In maniera del tutto analoga, si verifica che l’impedenza vista dalla porta 2,
quando la porta 1 è aperta, vale:
Z 22 = - j XC + R + R 0 || j X L = - j XC +
j XL R + R0
=4+3j.
R + R 0 + j XL 5 5
Più complicato è il calcolo dell’impedenza mutua Z m, definita dalla relazione
Z m = V1
I2
.
I1 = 0
Con riferimento allo schema indicato nella figura seguente, risulta
V1 = R I21 - j XC I2 ,
laddove un partitore mostra che
166 - Circuiti elettrici in evoluzione dinamica
I21 = I2
j XL
.
R + R 0 + j XL
R0
I21
I1 = 0
1
I2 2
+
+
L
R
C
V1
−
V2
−
I2
1'
I2
I2 2'
I1 = 0
Mettendo insieme le ultime due relazioni, concludiamo:
Z m = - j XC +
j R XL
=2-1j.
R + R 0 + j XL 5 5
Provate ora voi a verificare che allo stesso risultato si sarebbe arrivati anche
utilizzando l’altra definizione della mutua impedenza:
Z m = V2
I1
.
I2 = 0
R0
I2 2
I1
1
+
L
R
V1
C
−
1'
I1
V2 = 0
I2 2'
167 - Circuiti elettrici in evoluzione dinamica
Passiamo, ora, alla rappresentazione in termini di ammettenze, e cominciamo a
calcolare l’elemento Y11, tramite la definizione. Esso è l’ammettenza equivalente
vista dalla porta 1, quando la porta 2 è chiusa in corto circuito:
Y11 =
I1
V1
.
V2 = 0
Lo schema prima riportato suggerisce che risulta:
1
Y11 = 1 +
=3 +1j.
R0 R + -jXC || jXL 4 4
In maniera simile, può controllare gli altri due elementi valgono:
Ym = - 1 + 1 j ,
4 4
Y22 = 3 - 3 j .
4 4
Passiamo, infine, alla rappresentazione ibrida, definita dalle relazioni:
V1 = H11 I1 + H12 V2 ,
I2 = H21 I1 + H22 V2 .
Gli elementi che definiscono questa rappresentazione hanno dimensioni diverse (da
ciò discende il nome ibrida):
H11 = Ω ,
H22 = S ,
H12 e H21 sono adimensionali .
Adoperando alcuni risultati già ottenuti, abbiamo subito:
H11 = V1
I1
V2 = 0
= 1 =6-2j.
Y11 5 5
In maniera duale, è anche:
H22 =
I2
V2
I1 = 0
= 1 =4-3j.
Z 22 5 5
Un pochino più complicato è il calcolo dei due elementi H12 e H21. Cominciamo
con H12. Esso è definito come
168 - Circuiti elettrici in evoluzione dinamica
H12 = V1
V2
.
I1 = 0
D’altra parte, quando I1 = 0, risulta:
V1 = Z m I2 e V2 = Z 22 I2 .
Da queste due relazioni, otteniamo allora:
H12 = Z m = 1 - 2 j .
Z 22 5 5
L’ultimo elemento, H21, può essere ottenuto mediante il teorema di reciprocità:
H21 = - H12 = - 1 + 2 j .
5 5
Provate voi a mostrare che l’altra rappresentazione ibrida ‘G’ vale:
G11 = 2 + 1 j ,
3 3
G12 = - 1 ,
3
G21 = 1 ,
3
G22 = 2 + 2 j .
3 3
Un’ultima considerazione: l’esercizio appena svolto lascia intuire che tra gli
elementi delle diverse rappresentazioni di un doppio bipolo esiste una relazione.
Su molti manuali si forniscono tabelle con queste relazioni di collegamento. Qui si
vuole solamente sottolineare che, qualora si dovessero cercare più
rappresentazioni per un doppio bipolo, si tenti sempre di minimizzare il numero
di elementi da calcolare, tentando di adoperare quei legami che con un poco di
attenzione e di buon senso si intuiscono facilmente.
Passiamo, poi, ad esaminare come funzioni in regime sinusoidale il trasformatore
ideale.
Esempio 17 - La rete in figura opera in regime sinusoidale. Determinare la
potenza complessa erogata dal generatore di tensione.
169 - Circuiti elettrici in evoluzione dinamica
C
R
a:1
+
e(t)
−
R
L
Si assuma e(t) = E 2 sen(ωt), E = 16.4 V, ω = 200 rad/s, R = 10 Ω, L = 64 mH,
C = 0.25 mF, a = 0.8.
Cominciamo, come al solito, a calcolare le due reattanze:
XL = ω L = 12.8 Ω e XC = 1 = 20 Ω .
ωC
Poniamo poi:
e(t) = E 2 sen(ωt) → E = E = 16.4 V .
Trasportando al primario la serie R-C, l’impedenza equivalente, espressa in ohm,
vale:
Z = a 2 R - j XC = 6.4 - 12.8 j .
Potendosi la rete ridisegnare nella maniera semplificata di seguito riportata, la
corrente che fluisce attraverso il generatore vale:
I=
R 1+
a2
E
=1A.
+ j XL - a2 XC
170 - Circuiti elettrici in evoluzione dinamica
R
I
+
E
Z
−
XL
In definitiva, la potenza complessa erogata dal generatore di tensione vale:
P = E I * = 16.4 W .
Il generatore non eroga, quindi, alcuna potenza reattiva. Torneremo su questo,
quando, nel prossimo capitolo, prenderemo in esame più dettagliatamente la
risonanza.
Dovreste ricordare il giratore. Ebbene, rispetto alle cose che già sappiamo, il
giratore è un particolare doppio bipolo che consente di realizzare un induttore a
partire da un condensatore, e, dualmente, un condensatore a partire da un
induttore.
Esempio 18 - Si risolva la rete supponendo che essa operi in regime sinusoidale.
R
+
e(t)
−
i1(t)
G
i2(t)
+
+
v1(t)
v2(t)
−
−
L
Si assuma che e(t) = E 2 sen(ωt), E = 200 V, ω = 500 rad/s, R = 20 Ω, L = 1 µH,
G = 10 S .
Cominciamo col ricordare che il giratore è un doppio bipolo, il cui funzionamento
è descritto dalle relazioni che qui di seguito ricordiamo:
171 - Circuiti elettrici in evoluzione dinamica
i1 = G v2 ,
i2 = - G v1 ,
in cui G è la conduttanza di girazione.
La proprietà più importante di questo componente può essere illustrata quando la
porta ‘2’ è connessa a un induttore lineare tempo-invariante, di induttanza L. In
questo caso, si ha:
v1 = G v2 = - GL di2 = G2L di1 .
dt
dt
Pertanto, quando alla porta di uscita è collegato un induttore, la porta di ingresso
si comporta come un condensatore lineare tempo-invariante, di capacità G2L.
Pertanto, il giratore consente di realizzare bipoli condensatori a partire da
induttori.
Vale anche la proprietà duale (che ha forse maggiori ricadute sul piano
tecnologico): tramite un giratore è possibile realizzare un induttore a partire da un
condensatore. In particolare, se alla porta di uscita viene collegato un condensatore
di capacità C, la porta di ingresso si comporta come un induttore lineare e tempo
invariante di induttanza pari a C/G2 (provate a eseguire questa verifica).
È facile mostrare anche le seguenti proprietà: se il giratore è connesso a un
resistore lineare di resistenza R, il bipolo equivalente si comporta come un
resistore lineare di resistenza 1/(RG2); se il giratore è collegato a un resistore
controllato in tensione (corrente), ad esempio ad un diodo tunnel, il bipolo
equivalente si comporta come se fosse un resistore controllato in corrente
(tensione).
Venendo all’esercizio proposto, la prima cosa da fare è trasportare alla porta di
ingresso l’induttanza presente alla porta di uscita, che è pari ad una capacità
C = L G2 = 0.1 mF, ovvero una reattanza capacitiva di valore
1
XC = 1 =
= 20 Ω .
ω C ω L G2
172 - Circuiti elettrici in evoluzione dinamica
R
+
e(t)
−
i1(t)
+
v1(t)
C
−
Pertanto, prendendo come riferimento temporale la tensione erogata dal
generatore
e(t) = E 2 sen(ωt) → E = E = 200 V ,
la corrente del generatore vale
I1 =
E
= 200 = 5 (1 + j) = 5 2 , π .
R - j XC 20 (1 - j)
4
Ritornando nel dominio del tempo si ha immediatamente
i1(t) = 10 sen ωt + π ,
4
e, sfruttando la definizione di giratore, è anche
v2(t) = 1 i1(t) = sen ωt + π .
G
4
Ancora, dato che
v1(t) = e(t) - R i1(t) ,
applicando con cura le formule di addizione dei seni (riportate in Appendice), si
può scrivere
v1(t) = 200 2 sen(ωt) - 200 sen ωt + π ,
4
da cui discende che la corrente alla porta di uscita vale
173 - Circuiti elettrici in evoluzione dinamica
i2(t) = - G v1(t) = - 2000 2 sen(ωt) + 2000 sen ωt + π .
4
7.12 Un transitorio con forzamento sinusoidale
Prima di concludere questo lungo capitolo dedicato al regime sinusoidale, ci
sembra opportuno ritornare al punto dal quale eravamo partiti. Il regime
sinusoidale è quel particolare regime che si instaura nelle reti elettriche quando i
generatori sono funzioni sinusoidali del tempo, tutti della stessa frequenza.
È evidente che, nei circuiti reali, ciò accade per mezzo della chiusura di un
interruttore e, pertanto, il regime sinusoidale non si instaura immediatamente:
come abbiamo imparato nel capitolo precedente, alla chiusura dell’interruttore ha
luogo un transitorio che, più o meno rapidamente, si estingue per lasciare il posto
alla soluzione di regime, proprio quella che abbiamo imparato a calcolare con il
metodo dei fasori.
Per comprendere, almeno in un caso semplice, come questo accada, studiamo il
transitorio che la chiusura dell’interruttore T provoca nel circuito mostrato in
Figura 7.35. L’interruttore collega il generatore alla rete nell’istante t = 0: il
nostro scopo è determinare la corrente che fluisce nell’induttore.
T
1
iR(t)
t=0
j(t)
R
L
iL(t)
0
Figura 7.35: transitorio con forzamento sinusoidale.
Volendo rendere ancora più concrete le cose, assumiamo che j(t) = I 2 sen(ωt),
ω = 1 krad/s, I = 2 A, R = 1 Ω e L = 1 mH.
La rete è a riposo prima che l’interruttore commuti e, pertanto, la corrente
nell’induttore (che è pure l’unica variabile di stato presente nella rete), essendo
nulla per t < 0, si mantiene continua anche nell’istante di commutazione. Ciò
comporta che, in t = 0 s, possiamo assumere che
174 - Circuiti elettrici in evoluzione dinamica
iL(0) = 0 A ,
che costituirà la condizione iniziale per la soluzione del transitorio.
Applicando le leggi di Kirchhoff alla rete una volta che il generatore di corrente
sia stato collegato alla rete, si può scrivere il seguente sistema costituito dalle due
seguenti equazioni:
iR + iL = j
prima legge al nodo 1 ,
R iR = L diL
dt
secondo principio alla maglia R - L .
Questo sistema, eliminando la corrente iR(t) dalla seconda equazione, può essere
ridotto ad un unica equazione differenziale
L diL + iL = j .
R dt
Riassumendo, la corrente che circola nell’induttore del circuito di Figura 7.35
dopo la commutazione dell’interruttore si può descrive per mezzo del sistema
(equazione differenziale e condizione iniziale)
diL + iL = I sen(ωt) , per t ≥ 0 ,
τ τ
dt
iL(0) = 0 ,
in cui abbiamo introdotto, come d’abitudine, la costante di tempo del circuito
τ = L = 1 ms .
R
Già sapete che è difficile risolvere questo tipo di problema; qui ci limiteremo a
darvi la soluzione e farvela verificare con Spice, soluzione che si può scrivere
nella forma generale
iL(t) =
I 2
sen(ωt - ϕ) + e-t/τ sen ϕ .
2
1 + (ωτ)
Dato che la fase ϕ vale
175 - Circuiti elettrici in evoluzione dinamica
ϕ = arctan(ωτ) = arctan 1 = π ,
4
nel caso in esame, la soluzione generale si particolarizza come
iL(t) = 2 sen 1000t - π + e-1000t sen π .
4
4
La Figura 7.36 riporta sia la soluzione completa (a tratto pieno), sia il solo
termine sinusoidale (tratteggiato). Come è evidente, dopo un intervallo abbastanza
breve, i due andamenti sono indistinguibili. Sappiamo, infatti, che deve essere
iL(t) ≅
I 2 sen(ωt - ϕ)
1+
(ωτ)2
dopo qualche tempo (diciamo 5 costanti di tempo) ,
e questa corrente è proprio quella che calcoliamo con il metodo dei fasori.
Per convincere anche i più increduli tra voi, adoperiamo il metodo fasoriale per
risolvere l’esercizio.
3
2
1
t
τ
0
-1
j(t)
-2
iL(t)
-3
0
2
4
6
8
10
Figura 7.36: andamenti della corrente del generatore e dell’induttore.
Posto, allora,
176 - Circuiti elettrici in evoluzione dinamica
j(t) = I 2 sen(ωt) → J = I = 2 A ,
la corrente dell’induttore, usando la regola del partitore di corrente, vale:
IL = J
R
1
=2
= 2 =
3
-3
R+jωL
1+j
1 + j 10 10
2,0
= 2 ,-π .
4
2 , π/4
2
Tornando alle funzioni sinusoidali otteniamo, ovviamente, lo stesso risultato
precedente
iL(t) = 2 sen ωt - π .
4
Controllatelo con cura.
Proprio in questa uguaglianza sta tutta la forza del metodo simbolico: esso ci
consente di ottenere le soluzioni di regime quando il circuito è forzato da soli
generatori sinusoidali, aventi tutti la stessa pulsazione, senza ricorrere al
complicato apparato di equazioni differenziali (che neppure conosciamo!). Esso,
in altri termini, è un metodo che consente di operare con le reti in regime
sinusoidale per trovare la soluzione per mezzo di tecniche algebriche nel campo
complesso.
Non ci resta che fornirvi il listato Spice per simulare la rete e controllare i
risultati riportati.
Esempio 13
*Transitorio con forzamento sinusoidale
IJ
1
0
SIN(0 2.8284 159.155 0 0)
R0
1
0
1
L0
1
0
1m
.TRAN 10u 10m
.PROBE
.END
Solo un cenno alla nuova istruzione introdotta
IJ
1
0
SIN(0 2.8284 159.155 0 0)
177 - Circuiti elettrici in evoluzione dinamica
che introduce un generatore sinusoidale di ampiezza
2 2 ≅ 2.8284 ,
e frequenza
f = ω = 1000 Hz ≅ 159.155 .
2π
2π
Nel caso generale, questa istruzione introduce un generatore di corrente (ma
potrebbe essere usata con altrettanto successo per un generatore di tensione)
dipendente dal tempo secondo la relazione:
iG(t) =
I0 ,
per 0 ≤ t ≤ TD ;
I0 + IA e- θ (t - TD) sen 2π f (t - TD) ,
per TD ≤ t ≤ TSTOP .
Spieghiamo il significato dei diversi parametri. La corrente I0 è un valore costante
di corrente che, nel caso in esame, è stata considerata nulla; IA è, invece, il valore
massimo della sinusoide. Il tempo ‘TD’ rappresenta un certo ritardo, assente
nell’esempio che stiamo sviluppando, e che ci consente di non far partire la
sinusoide dall’istante t = 0, ma dall’istante TD. La frequenza della funzione
sinusoidale è f e, infine, la quantità θ, misurata in s-1, rappresenta un’eventuale
attenuazione che possiamo, aggiungere alla sinusoide: anch’essa è stata assunta
nulla.
178 - Circuiti elettrici in evoluzione dinamica
2
iG(t)
I0
1.5
1
0.5
0
TD
TSTOP
Figura 7.37: funzione sinusoidale smorzata.
Per non lasciare troppo nel vago le definizioni riportate, vi proponiamo la Figura
7.37 che li riassume tutti e che vi aiuta a ricordarli.
Se non altrimenti specificato, l’attenuazione θ e il tempo di ritardo TD vengono
assunti pari a zero, mentre, se non venisse indicata esplicitamente, la frequenza
sarebbe assunta pari a 1/TSTOP: abitudine diffusa dire che questi sono i valori
assunti per ‘default’ dal compilatore. Noi comunque, per evitare qualunque
confusione, li abbiamo riportati tutti.
7.12 Galileo Ferraris
Livorno Vercellese (oggi Livorno Ferraris), 1847 - Torino, 1897
Galileo Ferraris si laureò in Ingegneria Civile a Torino alla fine del 1869, con una
tesi ‘Sulle trasmissioni telodinamiche di Hirn’, in cui si discuteva il tentativo di
trasmissione a distanza dell’energia meccanica mediante fili e carrucole.
Ferraris appartiene alla generazione immediatamente successiva a quella che era
stata protagonista diretta delle vicende del nostro Risorgimento. Suo maestro fu
Giovanni Codazza, allievo a sua volta di quell’Ottaviano Fabrizio Mossotti, che
aveva saputo accomunare, nel corso di una vita movimentata, un rigoroso impegno
179 - Circuiti elettrici in evoluzione dinamica
scientifico e una intensa partecipazione civile alle vicende risorgimentali (prese
parte, tra l’altro, alle famose battaglie di Curtatone e Montanara).
Particolarmente rilevante, nell’opera di Ferraris, è la varietà degli interessi
scientifici, testimoniata da numerosi contributi originali in campi, come l’Ottica e
l’Acustica, anche lontani dall’Elettromagnetismo (che costituì, in ogni caso, il
settore scientifico cui dedicò maggiore attenzione). L’interesse per l’Acustica si
ricollega certamente alla sua spiccata passione per la musica, specialmente quella
wagneriana, di cui era profondo conoscitore. Lo spessore culturale di Ferraris e la
sua sensibilità letteraria sono testimoniate, fra l’altro, dalla qualità della sua prosa,
agile e ricca, oltre che rigorosa.
Detto questo, è indubbio che i contributi maggiori di Ferraris riguardino
l’Elettromagnetismo e le sue applicazioni. È qui che egli mostrò da un lato la
profondità del suo approccio fisico-matematico (era tra i pochi in Europa,
all’epoca, a padroneggiare le equazioni di Maxwell), dall’altro la vivacità del suo
ingegno creativo. Fu il primo a proporre una seria teoria scientifica di quel
‘generatore secondario’ di Gaulard e Gibbs (in realtà, un trasformatore) che tanta
sorpresa aveva prodotto nei contemporanei per le sue sorprendenti proprietà. E fu
il primo, inoltre, a rendersi conto che l’espressione della potenza media, in regime
sinusoidale, deve contenere un fattore dipendente dallo sfasamento fra tensione e
corrente (per molto tempo, questa espressione fu indicata come ‘formula di
Ferraris’).
L’altro, notevole, contributo di Ferraris, l’invenzione del motore asincrono,
traeva origine da una sofisticata analogia fisico-matematica tra la polarizzazione
rotatoria della luce, ottenuta sovrapponendo due stati piani di polarizzazione
opportunamente sfasati, e la rotazione di un campo magnetico, ottenuta
sovrapponendo due campi ortogonali, anch’essi opportunamente sfasati.
Fanno sorridere le parole con cui, concludendo il lavoro dedicato all’invenzione
del motore, Ferraris confessa di ritenere che ben difficilmente la sua invenzione
avrebbe potuto avere ricadute industriali. Queste ricadute furono, invece, subito
percepite dal più pratico inventore croato-americano Nikola Tesla, che, pur non
avendo compreso appieno il principio di funzionamento del motore (pensava che
le correnti indotte nel rotore andassero minimizzate), ne sviluppò subito le
potenzialità applicative (forte, tra l’altro, del potenziale economico-industriale
della Westinghouse).
Va ricordato, infine, il notevole impegno didattico di Ferraris. Le sue lezioni sulla
‘Teoria geometrica dei campi vettoriali’, e il suo testo di Elettrotecnica,
costituiscono ancor oggi un esempio magistrale di chiarezza espositiva, unita a
rigore fisico-matematico.
180 - Circuiti elettrici in evoluzione dinamica
Appendice: introduzione alla Trigonometria
Studiando il regime sinusoidale, vi sarete certamente accorti che, oltre ai numeri
complessi, è necessario avere una certa pratica con le funzioni trigonometriche,
almeno quelle più importanti. Crediamo di farvi cosa grata mettendo in questa
appendice un piccolo compendio di Trigonometria (piana), ponendo l’accento su
quelle formule che maggiormente interessano i nostri studi.
A.1 La misura degli angoli
Certamente avete la nozione intuitiva di angolo come quella porzione di piano
racchiusa tra due linee che si intersecano, o, più precisamente, come inclinazione
reciproca di due rette. Il nome tradisce il suo significato: deriva dal greco ankon,
che vuol dire ‘gomito’.
Tra gli angoli ve ne sono alcuni notevoli che più volte avete incontrato nel corso
dei vostri studi: l’angolo retto, ad esempio, è uno qualsiasi dei quattro angoli
formato da due rette perpendicolari.
Ma come si misurano gli angoli?
Vi sono parecchi modi di misurare un angolo. Le vostre calcolatrici hanno dei
tasti per scegliere la maniera di misurare gli angoli (tasti talvolta indicati come
‘deg’, ‘rad’ o ‘grd’). Qui ne esamineremo soltanto due. Cominciamo da quello che
vi è più familiare: la misura in gradi.
90°
angolo retto
180°
angolo piatto
360°
angolo giro
Figura A.1: alcuni angoli notevoli.
Tutto comincia col dire che l’angolo retto misura 90°. Il numero ‘90’ non ha nulla
di magico: è solo un numero convenzionale scelto per eseguire la misura. Ogni
misura, d’altra parte, ha bisogno di una unità la cui scelta, in qualche maniera, è
arbitraria. Seguendo questa strada, possiamo dire che un grado sessagesimale
181 - Circuiti elettrici in evoluzione dinamica
(detto anche più semplicemente ‘grado’) altro non è se non la novantesima parte
dell’angolo retto.
La Figura A.1 mostra alcuni angoli e le rispettive misure in gradi che, siamo
sicuri, sono delle vostre ... vecchie conoscenze!
Per indicare gli angoli useremo le lettere dell’alfabeto greco e, per ricordarci che
stiamo misurando un certo angolo α in gradi, useremo il simbolo α°.
Nella pratica scientifica e tecnica, tuttavia, è molto diffusa anche un’altra unità di
misura: il radiante. La definizione del radiante è descritta in Figura A.2.
B
C
α
Α
CA = CB = raggio (R) della circonferenza
arc(AB) = arco che congiunge i punti A e B
Figura A.2: definizione del radiante.
Su una circonferenza di centro C e raggio R, consideriamo un arco, indicato con
arc(AB). I segmenti CA e CB, essendo entrambi raggi, sono lunghi R. La misura
di un angolo α in radianti si ottiene dividendo la lunghezza di questo arco per il
raggio della circonferenza:
α = arc(AB) = arc(AB) = arc(AB) .
R
CA
CB
Ricorderete certamente che una circonferenza di raggio R misura 2πR, in cui π è
il cosiddetto ‘numero fisso’ che è un numero con infinite cifre decimali dopo la
virgola, alcune delle quali qui vi riportiamo:
π = 3.14159265359
.
Pertanto, dato che un quarto di circonferenza è pari a πR/2, possiamo scrivere per
un angolo retto
π rad = 90° ,
2
182 - Circuiti elettrici in evoluzione dinamica
in cui l’abbreviazione ‘rad’ (che qualche volta si sottintende) ci ricorda
semplicemente che abbiamo misurato l’angolo in radianti. Allo stesso modo,
scriveremo per l’angolo piatto e giro:
π rad = 180° , 2π rad = 360° .
Tra la misura di un angolo in gradi e quella in radianti esiste una relazione che
può essere sintetizzata dalla semplice proporzione
α : α° = π : 180° ,
in cui α è la misura dell’angolo in radianti e α° la corrispondente misura in gradi.
Da essa si possono ricavare le due formule di uso molto frequente
α = α° π ,
180°
(A.1)
per la conversione dei gradi in radianti, e l’altra
α° = α 180° ,
π
(A.2)
per la conversione dei radianti in gradi. Facciamo qualche esempio.
Supponiamo di avere un angolo di 30° e di essere interessati a sapere a quanti
radianti corrisponde. La relazione (A.1) fornisce immediatamente:
α = 30°
π =π.
180° 6
Alla stessa maniera provate che un angolo di 60° corrisponde π/3 radianti.
Invece, se abbiamo un angolo di π/4 radianti, siamo sicuri, in forza della formula
(A.2) che esso corrisponde a
α° = π 180°
= 45° .
4 π
Allo stesso modo si può dire che un angolo di π/12 radianti può essere anche
espresso come
183 - Circuiti elettrici in evoluzione dinamica
α° = π 180°
= 15° .
12 π
Continuate ad esercitarvi sulle formule (A.1) e (A.2) con gli angoli di 36° e di
π/18 radianti.
Ancora una curiosità. Quanto vale un radiante? Se abbiamo un angolo α = 1 rad,
la formula (A.2) ci dice che esso, espresso in gradi, è pari a
α° = 1 180°
π ≅ 57.30° .
Un’ultima osservazione sull’orientazione degli angoli.
Quando consideriamo una retta in un piano cartesiano, come ad esempio quella
mostrata in Figura A.3, l’angolo che essa forma con l’asse x viene, per
convenzione, misurato in senso antiorario, l’opposto del senso di rotazione delle
lancette dell’orologio. Pure i quattro quadranti in cui il piano resta suddiviso dalle
due rette perpendicolari, si numerano nello stesso senso con dei numeri romani I,
II, III e IV.
y
II
I
α
O
III
-α
x
α>0
IV
Figura A.3: misura di angoli orientati.
Un angolo viene rappresentato con un numero positivo quando è misurato,
dunque, nel verso antiorario a partire dal semiasse positivo dell’asse x. In caso
contrario, è rappresentato con un numero negativo.
A.2 Le principali funzioni trigonometriche
184 - Circuiti elettrici in evoluzione dinamica
Nel Capitolo 1 abbiamo già introdotto le principali funzioni trigonometriche; in
particolare, in quella sede, vi presentammo i grafici delle funzioni seno, coseno e
tangente. In questo paragrafo vogliamo imparare a calcolare ‘a mano’ il valore di
queste funzioni e, magari, scoprire qualche loro interessante proprietà. In realtà,
esistono anche altre funzioni trigonometriche, secante, cosecante e cotangente; esse
sono frequenti nelle applicazioni e, comunque, sono legate alle tre che stiamo per
introdurre.
Per definire e calcolare le funzioni ‘sen t’, ‘cos t’ e ‘tan t’ [che si trovano scritte
anche nella forma ‘sen(t)’, ‘cos(t)’ e ‘tan(t)’] seguiamo il procedimento di seguito
proposto.
• Si disegna una circonferenza di raggio R qualsiasi come in Figura A.4, nonché
due assi ortogonali, x e y, passanti per il centro O della circonferenza.
• A partire dall’asse x, si misura, poi, in senso antiorario un angolo orientato α
(come in Figura A.4), intersecando la circonferenza nel punto P (che dipende
ovviamente da α) con la semiretta che parte dall’origine.
y
P
α
O
Q
x
Figura A.4: circonferenza utile alla definizione delle funzioni trigonometriche.
• Si abbassa, poi, la perpendicolare dal punto P sull’asse x, fino al punto Q.
• Per definizione, scriveremo le funzioni trigonometriche seno, coseno e tangente
come i seguenti tre rapporti:
sen α = lunghezza del segmento PQ = PQ ;
lunghezza del segmento OP OP
(A.3a)
185 - Circuiti elettrici in evoluzione dinamica
cos α = lunghezza del segmento OQ = OQ ;
lunghezza del segmento OP OP
(A.3b)
tan α = lunghezza del segmento PQ = PQ .
lunghezza del segmento OQ OQ
(A.3c)
• I valori di sen α sono da considerarsi positivi quando il punto P giace sulla
semicirconferenza ‘superiore’, rispetto all’asse x, cioè nel primo e secondo
quadrante; negativi, invece, quando P giace sulla semicirconferenza ‘inferiore’,
cioè nel terzo e quarto quadrante. Essa è periodica di periodo 2π e, in ogni caso,
assume valori compresi nell’intervallo - 1 ÷ 1. Notate pure come il seno assuma il
valore massimo in α = π/2 ≅ 1.57 e quello minimo in α = 3π/2 ≅ 4.71.
y = sen x
1
- 2π
-π
0
π
2π
x
-1
Figura A.5: la funzione seno.
• I valori di cos α sono da considerarsi positivi quando il punto P giace sulla
semicirconferenza di ‘destra’ rispetto all’asse y, nel primo e quarto quadrante;
negativi, invece, quando P giace sulla semicirconferenza di ‘sinistra’, nel secondo e
terzo. Si tratta sempre di una funzione periodica di periodo 2π che assume valori
compresi nell’intervallo - 1 ÷ 1.
186 - Circuiti elettrici in evoluzione dinamica
y = cos x
1
-π
π
- 2π
0
2π
x
-1
Figura A.6: la funzione coseno.
• I valori di tan α sono da considerarsi positivi quando il punto P giace nel primo
e terzo quadrante del piano; negativi, invece, quando P giace nel secondo e quarto
quadrante. Essa è periodica di periodo π, cioè la metà del periodo del seno e del
coseno. Inoltre si tratta di una funzione che, nel primo quadrante assume valori
positivi, crescenti: in prossimità di π/2, assume valori grandissimi, al limite
infiniti. Nel secondo quadrante cresce partendo da valori negativi, e continua a
crescere nel terzo quadrante, ma assumendo valori positivi. Infine, nel quarto
quadrante, torna ad assumere valori negativi crescenti.
Vale la pena notare che, se consideriamo il rapporto tra le funzioni seno e coseno,
otterremo la funzione tangente. Dividendo membro a membro le formule (A.3) si
ha, infatti:
sen α = PQ OP = PQ = tan α .
cos α OP OQ OQ
(A.4)
Questa ultima relazione mette in evidenza che, una volta note le funzioni seno e
coseno, anche la tangente è nota: basta fare il rapporto tra esse.
Per convincervi che il metodo funziona davvero, proviamo a calcolare le funzioni
trigonometriche di qualche angolo notevole. Ad esempio, poniamo α = π/6 = 30°.
187 - Circuiti elettrici in evoluzione dinamica
y = tan x
-π
2
π
2
0
x
Figura A.7: la funzione tangente.
Partiamo (Figura A.8) dal triangolo equilatero ABC e consideriamo l’altezza AH.
Dalle relazioni geometriche
BH = 1 AB e
2
2
2
AH = AB - BH = 3 AB ,
2
discende immediatamente che
sen π = BH = 1 , cos π = AH = 3 , tan π = BH = 1 = 3 .
6 AB 2
6 AB 2
6 AH
3
3
A
π
6
B
C
H
Figura A.8: calcolo delle funzioni trigonometriche per un angolo di 30°.
188 - Circuiti elettrici in evoluzione dinamica
Sempre dallo stesso triangolo precedente, dato che l’angolo
ABH = 60° = π ,
3
si ricava pure che
sen π = AH = 3 , cos π = BH = 1 , tan π = AH = 3 .
3 AB 2
3 AB 2
3 BH
Nella tabella che segue riassumiamo i valori delle funzioni trigonometriche per
alcuni angoli notevoli.
Seno
0
1/2
0° = 0
30° = π/6
45° = π/4
60° = π/3
90° = π/2
1/ 2
3 /2
1
Coseno
1
Tangente
0
3 /2
1/ 2
1/2
0
1/ 3
1
3
∞
Infine, vale la pena sottolineare ancora una volta che la vostra calcolatrice calcola
le funzioni trigonometriche ... presto e bene.
A.3 L’identità pitagorica
Torniamo alle definizioni del seno e del coseno date dalle relazioni (A.3) che, di
seguito, riassumiamo per comodità:
sen α = PQ e cos α = OQ .
OP
OP
Dalla Figura A.4, si evince che OPQ è un triangolo rettangolo e, allora,
applicando il teorema di Pitagora, risulta:
2
2
2
PQ + OQ = OP .
Questa relazione può anche essere scritta nella forma equivalente
189 - Circuiti elettrici in evoluzione dinamica
2
2
PQ + OQ = 1 .
2
2
OP
OP
Nel primo rapporto riconosciamo la definizione del seno, nel secondo quella del
coseno. Pertanto, otteniamo la cosiddetta identità pitagorica
sen2 α + cos 2 α = 1 ,
(A.5)
che ci lascia intuire che nemmeno il seno e il coseno sono funzioni del tutto
indipendenti. In tal modo, se conosciamo, ad esempio, che
sen π = 3 ,
3
2
dalla relazione (A.5) ricaviamo immediatamente che
cos π =
3
1 - sen 2 π =
3
1-3 =
4
1 =1.
4 2
In realtà, davanti alla radice quadrata avremmo dovuto mettere due segni, il più e
il meno; il segno meno è stato scartato dato che, nel primo quadrante, tanto il
seno, quanto il coseno sono numeri positivi.
A.4 Qualche utile relazione
Consideriamo i due numeri complessi di modulo unitario
c1 = 1 , θ1 = cos θ1 + j sen θ1 e c2 = 1 , θ2 = cos θ2 + j sen θ2 .
Sviluppiamo il prodotto tra questi due numeri sia in forma polare, sia in forma
cartesiana. Cominciamo con quella polare:
c1 c2 = 1 , θ1 1 , θ2 = 1 , θ1 + θ2 = cos θ1 + θ2 + j sen θ1 + θ2 .
Per quella cartesiana, invece, ricordando che j2 = - 1, valgono le relazioni:
(A.6)
190 - Circuiti elettrici in evoluzione dinamica
c1 c2 = cos θ1 + j sen θ1 cos θ2 + j sen θ2 =
= cos θ1 cos θ2 + j2 sen θ1 sen θ2 + j cos θ1 sen θ2 + sen θ1 cos θ2 =
(A.7)
= cos θ1 cos θ2 - sen θ1 sen θ2 + j cos θ1 sen θ2 + sen θ1 cos θ2 .
Uguagliando le parti reali e quelle immaginarie dei due numeri complessi (A.6) e
(A.7),, si ottengono le cosiddette formule di addizione del seno e del coseno:
cos θ1 + θ2 = cos θ1 cos θ2 - sen θ1 sen θ2 ,
sen θ1 + θ2 = cos θ1 sen θ2 + sen θ1 cos θ2 .
(A.8)
Se ripetiamo questo ragionamento per i numeri complessi
c1 = 1 , θ1 = cos θ1 + j sen θ1 e c2 = 1 , - θ2 = cos θ2 - j sen θ2 ,
dove il nuovo c2 è il coniugato del precedente, otterrete, senza troppo sforzo,
quelle che sono note come formule di sottrazione:
cos θ1 - θ2 = cos θ1 cos θ2 + sen θ1 sen θ2 ,
sen θ1 - θ2 = cos θ1 sen θ2 - sen θ1 cos θ2 .
(A.9)
Un esempio classico di applicazione delle formule di addizione e sottrazione è il
seguente: si voglia calcolare il seno a 75°. Ora, dato che 75° = 45° + 30°,
consultando la tabella riportata nel paragrafo precedente, otteniamo:
sen 75° = sen(45° + 30°) = sen 45° cos 30° + cos 45° sen 30° =
= 1 3 + 1 1= 3+1 .
2 2
2 2
2 2
Parecchie volte incontrerete queste formule e, perciò, fate bene a ricordarvi
almeno ... dove potete trovarle, dato che da esse ne discendono molte altre.
Ad esempio, se nelle relazioni (A.8) scegliete valori uguali per i due angoli, cioè
θ1 = θ2 = θ, esse ci consentono di scrivere quelle che sono note come formule di
duplicazione:
cos(2θ) = cos 2 θ - sen 2 θ e sen(2θ) = 2 sen θ cos θ .
(A.10)
191 - Circuiti elettrici in evoluzione dinamica
Se provate a fare la stessa cosa nelle formule di sottrazione (A.9) otterrete di
nuovo l’identità pitagorica (A.5) ed un’identità banale (0 = 0).
Dalle formule di addizione e sottrazione (A.8) e (A.9) si possono trarre ancora
alcune utili relazioni. Cominciamo a riscrivere le formule di addizione e
sottrazione del coseno, cioè la prima delle (A.8) e delle (A.9):
cos θ1 - θ2 = cos θ1 cos θ2 + sen θ1 sen θ2 ,
cos θ1 + θ2 = cos θ1 cos θ2 - sen θ1 sen θ2 .
Sommando e sottraendo membro a membro queste ultime due relazioni, discende
che
cos θ1 - θ2 + cos θ1 + θ2 = 2 cos θ1 cos θ2 ,
cos θ1 - θ2 - cos θ1 + θ2 = 2 sen θ1 sen θ2 .
(A.11)
La stessa cosa, ripetuta sulle formule di addizione e sottrazione del seno, invece,
fornisce:
sen θ1 - θ2 + sen θ1 + θ2 = 2 cos θ1 sen θ2 ,
sen θ1 + θ2 - sen θ1 - θ2 = 2 sen θ1 cos θ2 .
(A.12)
Le formule (A.11) e (A.12) trasformano il prodotto di due funzioni seno e coseno
in somma, e sono quelle che abbiamo usato nello studio delle potenze in regime
sinusoidale.
Infine, se poniamo θ1 = θ e θ2 = π/2, sempre le (A.8) e (A.9), ci consentono di
scrivere delle utili relazioni che, durante lo studio del regime sinusoidale, abbiamo
più volte adoperato dato che ci consentivano di sostituire un generatore sinusoidale
con uno cosinusoidale o viceversa. Dunque, ricordando che
sen π = 1 e cos π = 0 ,
2
2
possiamo scrivere:
cos(θ + π/2) = - sen θ , sen(θ + π/2) = cos θ ,
cos(θ - π/2) = sen θ , sen(θ - π/2) = cos θ .
(A.13)
192 - Circuiti elettrici in evoluzione dinamica
Ora, però, è tempo di smetterla con la Trigonometria e di tornare ai circuiti!
193 - Circuiti elettrici in evoluzione dinamica
Capitolo 8
Applicazioni del regime sinusoidale
8.1 Introduzione
8.2 La risonanza nei circuiti elettrici
8.2.1 Risonanza serie
8.2.2 Risonanza parallelo
8.3 Rifasamento
8.4 Massimo trasferimento di potenza
Appendice: bipoli passivi reali
Sommario
Abbiamo raccolto in questo capitolo alcune applicazioni delle reti in
regime sinusoidale: si tratta della risonanza nelle reti elettriche, del
rifasamento e del massimo trasferimento di potenza. Esse non sono le
uniche possibili e altre ne vedrete studiando le macchine elettriche, gli
impianti o i circuiti elettronici. Ci è sembrato interessante, comunque,
considerarle tutte insieme per due motivi: sono semplici da studiare e
hanno moltissime applicazioni pratiche. Preparatevi, dunque, a studiare
un capitolo in cui applicherete i metodi che avete appreso studiando il
regime sinusoidale per risolvere alcuni problemi che un tecnico incontra
con una certa frequenza nella pratica professionale.
194 - Circuiti elettrici in evoluzione dinamica
8.1 Introduzione
L’ampio risalto dato nel capitolo precedente al regime sinusoidale è giustificato
dalle molteplici applicazioni che di esso esistono: per fare solo due fra i più
importanti esempi, pensate che le principali macchine elettriche e la trasmissione
dell’energia elettrica vengono realizzate in regime sinusoidale.
In questo capitolo abbiamo raccolto alcune applicazioni in corrente alternata, non
meno interessanti, che si utilizzando in campi anche molto diversi. Abbiamo
preferito scorporale dal capitolo relativo al regime sinusoidale per dare ad esse
maggior risalto.
Dopo avere introdotto il concetto di comportamento variabile in frequenza e
parlato della risonanza dei circuiti elettrici, studieremo il rifasamento e
l’importante teorema del massimo trasferimento di potenza che, quando
introducemmo il regime stazionario omettemmo, per introdurlo in tutta la sua
generalità in regime sinusoidale. Infine, concluderemo il capitolo facendo un
cenno alla pratica realizzazione dei bipoli resistore, induttore e condensatore,
introducendo quei parametri che ci consentono di capire di quanto il bipolo reale
che stiamo usando si discosti dal modello ideale che adoperiamo nello studio e
nella simulazione.
8.2 La risonanza nei circuiti elettrici
Un circuito elettrico opera in condizioni risonanti quando esiste un accordo tra la
frequenza che impongono i generatori e quella caratteristica del circuito. Non è un
fenomeno che si verifica esclusivamente nelle reti elettriche, ma si può ritrovare
in tutti i sistemi dinamici in cui è possibile avere l’accordo detto. Pensate, per
esempio, a un plotone si soldati che attraversa un ponte; essi non possono marciare
al ‘passo’ dato che, se sul ponte poggiano il piede a terra tutti nello stesso istante,
esiste la possibilità che ciò inneschi una pericolosa risonanza e il ponte può, in
certe condizioni, persino crollare. Senza pensare, però, a effetti tanto catastrofici,
ci accingiamo a studiare la risonanza nelle reti elettriche allo scopo di
comprendere come funzionano certi oggetti di uso quotidiano.
8.2.1 Risonanza serie
Nel capitolo precedente abbiamo visto che in un circuito RLC serie (Figura 8.1),
alimentato da un generatore di f.e.m. sinusoidale, si può verificare la condizione
per cui la caduta capacitiva compensa perfettamente la caduta induttiva, e il
circuito appare al generatore come puramente ohmico.
195 - Circuiti elettrici in evoluzione dinamica
Supponiamo che i valori di L e C siano assegnati, e domandiamoci quando ciò
accade. Il generatore di tensione deve operare ad una pulsazione (nel gergo
tecnico, la pulsazione viene spesso confusa con la frequenza, tanto che i due
termini vengono usati come sinonimi) pari a
XL = X C → ω L = 1
→ ω2 = 1 → ω0 = 1 ,
ωC
LC
LC
(8.1)
che corrisponde ad una frequenza
1
f0 = ω 0 =
.
2π 2π LC
(8.2)
1
+
vR(t)
+
R
−
C
−
2
+
e(t)
L
0
−
vL(t)
−
+
i(t) 3
vC(t)
Figura 8.1: circuito RLC serie.
Siamo dunque nella già menzionata condizione di risonanza tra la frequenza del
forzamento e quella propria del sistema. Un circuito di tal genere è detto anche
circuito risonante. In esso, la tensione erogata dal generatore, che, in generale, è
somma delle tre tensioni del resistore, dell’induttore e del condensatore, si riduce
ad essere uguale alla sola tensione del resistore perché le altre due si compensano
perfettamente, essendo uguali ed opposte. Quindi possiamo concludere che
l’impedenza diventa un numero complesso puramente reale, privo della parte
immaginaria (reattanza nulla), simbolicamente:
Z = R + j XL - XC
→ ℑ Z =0.
Le tensioni dell’induttore e del condensatore si calcolano, poi, agevolmente come
prodotto tra la corrente e relativa impedenza (Figura 8.2).
196 - Circuiti elettrici in evoluzione dinamica
Sia nel caso della risonanza serie, sia in quello della risonanza parallelo che
esamineremo tra poco, bisogna tener presente che abbiamo assunto di essere a
regime (sinusoidale). Ciò comporta che, in tempi lontani, di cui si è perduto ogni
traccia, il generatore è stato collegato alla rete per mezzo di un interruttore che ha
portato all’attuale situazione di regime. Durante il transitorio, il generatore ha
fornito al complesso dei due elementi con memoria presenti nella rete una certa
quantità di energia; d’altra parte, da quanto dicemmo nel Capitolo 6, sappiamo che
l’energia immagazzinata nel condensatore è proporzionale al quadrato della
tensione su di esso, mentre quella nell’induttore è proporzionale al quadrato della
corrente che lo attraversa. Allora, se tensione e corrente non sono in fase, ma in
quadratura, come nel nostro caso, accadrà che quando l’energia elettrica associata
al condensatore è massima, quella magnetica associata all’induttore è nulla e
viceversa. Se poi in particolare tali energie massime sono uguali, una volta
raggiunto il regime si assisterà ad un periodico scambio di energia tra campo
elettrico e campo magnetico che vede completamente estraneo il generatore, che
dovrà solo occuparsi di fornire la potenza dissipata nel resistore.
VL = j XL I
E = VR = R I
ϕ=0
I
VC = - j XC I
Figura 8.2: diagramma fasoriale di un circuito RLC serie in risonanza.
Negli impianti di potenza la condizione di risonanza va evitata poiché essa può
provocare pericolose sovracorrenti (o nel caso della risonanza serie,
sovratensioni) che possono produrre danni irreparabili nei diversi componenti.
Per convincersi di ciò basta osservare il diagramma fasoriale di Figura 8.2; le
tensioni dell’induttore e del condensatore, come già osservato, sono uguali e
possono diventare, per particolari valori dei parametri del circuito, molto più
grandi della tensione di alimentazione stessa. È questa la ragione ultima della
creazione delle pericolose sovratensioni. Provate a dare dei particolari valori ai
parametri R, L e C che rendano la tensione erogata dal generatore più piccola
delle altre due.
197 - Circuiti elettrici in evoluzione dinamica
Il fenomeno della risonanza può essere visto anche da un altro punto di vista,
molto importante anche per le applicazioni, specialmente nel campo dei circuiti:
esso è caratteristico di qualsiasi sistema che abbia la capacità di oscillare su
frequenze proprie. Vediamo di capire cosa ciò significhi continuando l’esame del
circuito di Figura 8.1. Supponiamo di poter disporre di un generatore di tensione
a frequenza variabile, che, come d’abitudine, rappresenteremo per mezzo della
funzione sinusoidale
e(t) = E 2 sen(ωt) → E = E .
Questa volta dobbiamo immaginare che vi sia sul generatore di tensione ‘una
manopola’ che consenta di variare a piacimento la frequenza che esso eroga.
Introducendo il numero complesso che rappresenta l’impedenza
Z = R + j XL - XC =
R2 + XL - XC
2
, arctan XL - XC = Z(ω) , ϕ(ω) ,
R
possiamo, per ciascuna frequenza, calcolare il valore del fasore della corrente
I=
E
E
=
= I(ω) , - ϕ(ω) ,
R + j XL - XC
Z(ω) , ϕ(ω)
e anche il suo modulo
I=
E
R + XL - XC
2
2
= I(ω) .
(8.3)
Nella formula (8.3) abbiamo esplicitamente, con il simbolo I(ω), messo in evidenza
che il modulo della corrente dipende, per la presenza delle due reattanze, dalla
pulsazione di funzionamento (notate pure che il modulo E del generatore di
tensione non dipende dalla pulsazione). Cerchiamo di essere ancora più chiari e di
esplicitare questa dipendenza dalla pulsazione. Dato che (ω0 = 1/ LC )
ω ω L - ω0 1 =
XL - XC = ω L - 1 = ω
0
ω ω0 C
0
ωC
la formula (8.3) può riscriversi come:
L ω - ω0 ,
C ω0 ω
198 - Circuiti elettrici in evoluzione dinamica
I(ω) =
E
R2 + L ω - ω 0
C ω0 ω
2
.
(8.4)
È abitudine diffusa indicare con
Q= 1
R
L
C
(8.5)
un parametro adimensionale cui si dà il nome di fattore di qualità (o di merito). Il
motivo sarà chiaro tra un momento; per ora ci basti osservare che esso ci consente
di ricavare il rapporto
L = R2 Q2 ,
C
che, sostituito nella (8.4), ci consente di scrivere il modulo della corrente nella
nuova forma:
R I(ω) =
E
1
1 + Q2 ω - ω 0
ω0 ω
1.2
= F(ω) .
(8.6)
2
F(ω)
1
Q=5
0.8
0.6
0.4
0.2
ω
ω0
0
0
1
2
3
4
5
Figura 8.3: andamento della funzione F(ω) al variare della pulsazione.
199 - Circuiti elettrici in evoluzione dinamica
Negli ultimi passaggi riportati non vi è nulla di concettuale da comprendere; essi
sono solo formali e servono a scrivere in maniera più compatta e significativa la
corrente. La nuova funzione F(ω) rappresenta una quantità adimensionale,
proporzionale alla corrente, che prende il nome di curva di risonanza.
Riportiamo, dunque, in un diagramma la curva di risonanza, relativa alla corrente,
in funzione della pulsazione.
Cerchiamo di farci una ragione dell’andamento riportato in Figura 8.3. A basse
frequenze, poiché il condensatore si comporta come un circuito aperto (si dice
anche che presenta una impedenza infinita) nel circuito non circola corrente e,
allora, non può che essere F(0) = 0. Anche per valori elevati della frequenza, la
corrente tende a diventare nulla, questa volta a causa dell’induttore che, per queste
frequenze, si comporta come un circuito aperto. In corrispondenza della
pulsazione di risonanza, il modulo della corrente ha un massimo pari ad E/R, cioè
F(ω0) = 1.
2
ϕ(ω)
1.5
1
0.5
ω
ω0
0
-0.5
-1
Q=5
-1.5
-2
0
1
2
3
4
5
Figura 8.4: andamento della fase ϕ (ω) al variare della pulsazione.
Per rendere completa l’informazione, è necessario anche riportare l’andamento
della fase dell’impedenza, ϕ (ω), che si può riscrivere nella forma adimensionale:
ϕ (ω) = ∠ Z(ω) = arctan XL - XC = arctan Q ω - ω 0 .
ω0 ω
R
(8.7)
200 - Circuiti elettrici in evoluzione dinamica
Come era prevedibile (Figura 8.4), per frequenze inferiori a quella di risonanza il
circuito si comporta globalmente come un carico prevalentemente capacitivo:
l’impedenza offerta dal condensatore prevale e la fase ϕ(ω) vale circa
- π/2 ≅ - 1.57. Per frequenze invece superiori a quella di risonanza, il carico è
prevalentemente induttivo, e la fase della corrente tende, piuttosto lentamente, a
π/2 ≅ 1.57. Alla frequenza di risonanza, come già sappiamo, il carico si comporta
come se fosse puramente resistivo; quindi, per ω = ω0, la fase della corrente vale
zero.
Le cose più interessanti si scoprono facendo variare il fattore di qualità del
circuito. All’aumentare di esso, la curva di risonanza diventa sempre più ripida
nell’intorno della frequenza di risonanza e stretta (Figura 8.5). Si usa anche dire
che essa è sempre più ‘piccata’ attorno alla frequenza di risonanza.
Osservando la Figura 8.5, si conclude immediatamente che, al crescere del valore
di Q, le cosiddette caratteristiche filtranti del circuito si accentuano. Si dice che un
circuito si comporta da filtro, se lascia ‘passare’ di preferenza un determinato
intervallo di frequenze (banda), e attenua tutte le altre. Per essere ancora più
chiari, consideriamo la curva corrispondente al caso Q = 10 di Figura 8.5; se
supponiamo che il nostro generatore di tensione lavori ad una pulsazione molto
più grande (oppure molto più piccola) rispetto alla pulsazione di risonanza,
possiamo dire che, con buona approssimazione, la funzione F(ω), che rappresenta
la corrente, è pressoché nulla.
Per far circolare una corrente significativa nel circuito, bisogna che esso operi o
in condizioni di risonanza (in cui abbiamo un massimo), oppure in un suo intorno,
cioè un poco prima o un poco dopo. Questo intervallo di frequenze utili si chiama
in gergo banda. In ultima analisi, la banda rappresenta un intervallo di pulsazioni
(o di frequenze) entro cui la curva della funzione F(ω) si mantiene al di sopra di
un prefissato valore di soglia.
Ad esempio, assumiamo come banda (conosciuta come banda a tre decibel, o banda
a 3 dB) l’intervallo di frequenze entro cui la funzione F(ω) si trovi sempre al di
sopra del valore 1/ 2 . Incontrerete certamente altre definizioni della banda nel
corso dei vostri studi.
Dato che un grafico vale più di mille parole, abbiamo riportato in Figura 8.6 la
definizione di banda (detta talvolta anche banda passante) che è, dunque, da
intendersi come l’intervallo di frequenze pari a
banda → ∆f = ω 2 - ω 1 .
2π
(8.8)
201 - Circuiti elettrici in evoluzione dinamica
1.2
F(ω)
1
Q=1
Q=5
Q = 10
0.8
0.6
0.4
0.2
ω
ω0
0
0
1
2
3
4
5
Figura 8.5: risonanza per vari valori di Q.
Si potrebbe dimostrare che la banda, indicata nella (8.8) con il simbolo ∆f, per un
circuito RLC serie caratterizzato da un fattore di merito elevato, è data dalla
formula:
∆f = ω 0 .
2π Q
(8.9)
L’inverso di Q viene detto fattore di selettività, e la formula (8.9) mette in
evidenza che, all’aumentare di Q, la banda diventa sempre più piccola e, pertanto,
il circuito è sempre più selettivo in frequenza.
È giunto il momento di dare una interpretazione fisica del fattore di merito. In
condizioni di risonanza, nella rete circola la corrente:
I = E = E → i(t) = I 2 sen(ω0t) = E 2 sen(ω0t) .
R R
R
Cominciamo a determinare l’energia E R assorbita dal resistore in un intervallo di
tempo pari proprio al periodo T. Dalla definizione che abbiamo dato nel capitolo
precedente di valore efficace, segue immediatamente:
202 - Circuiti elettrici in evoluzione dinamica
E R = P T = R I2 T = 2π R I 2 .
ω0
1.2
(8.10)
F(ω)
1
1 ≅ 0.707
2
0.8
0.6
0.4
0.2
ω
0
0
ω1 1
ω2 2
3
4
5
Figura 8.6: definizione di banda.
Continuiamo, poi, con il calcolo dell’energia immagazzinata nell’induttore, che
vale
UL(t) = 1 L i2(t) = L I2 sen2(ω0t) ,
2
e che assume un valore massimo (quando, ovviamente, la funzione seno al
quadrato è pari a uno) pari a
UL-max = L I2 .
(8.11)
Consideriamo, allora, il rapporto tra queste due energie, facendo il rapporto tra la
(8.11) e la (8.10):
valore massimo dell’energia immagazzinata nell’induttore =
energia assorbita in un periodo dal resistore
L
= UL-max = ω0 L = 1
= 1 1
ER
2π R 2π R LC
2π R
L = Q .
C
2π
203 - Circuiti elettrici in evoluzione dinamica
Ebbene, se accettiamo il fatto che il massimo di energia immagazzinata
dall’induttore è uguale a quella immagazzinata dal condensatore (cosa che potete
provare a verificar da soli), in forza dell’ultima relazione scritta, possiamo
concludere che il fattore di qualità rappresenta, a parte la costante 2π, proprio il
rapporto tra il massimo valore dell’energia immagazzinata negli elementi a
memoria e l’energia dissipata in un periodo nel resistore. In formula:
Q = 2π energia massima immagazzinata in uno dei due elementi a memoria .
energia dissipata dal resistore
In ultima analisi possiamo dire che se il fattore di merito è elevato vuol dire che
gli elementi a memoria immagazzinano molta energia o che il resistore ne dissipa
poca; se la cifra di merito è piccola, allora o il circuito immagazzina poca energia,
oppure ne dissipa molta nel resistore.
Prima di concludere questo paragrafo, vogliamo soltanto sottolineare come, in
condizioni di risonanza, le potenze reattive ai capi dell’induttore e del
condensatore siano proporzionali ai valori massimi di energia immagazzinata in
ciascuno di essi. Ricordando la (8.11), per l’induttore risulta:
QL = XL I2 = ω L I2 = ω UL-max .
Provate voi ad ottenere che, per il condensatore, deve essere:
2
QC = - VC = - ω C V2C = - ω UC-max .
XC
Tra le tantissime applicazioni che sfruttano il fenomeno della risonanza nelle reti
elettriche, tutte di importanza notevole, dobbiamo ricordare il circuito di sintonia
di un apparecchio radiofonico o televisivo. Quando ruotiamo la manopola della
sintonia di un ricevitore non facciamo altro che modificare la capacità di un
circuito risonante, e quindi variamo la sua frequenza di risonanza, in modo tale da
selezionare l’opportuna banda che desideriamo filtrare.
Esempio 1 - Supponendo la rete di figura alimentata dal solo generatore e(t) a
frequenza variabile, si determini la pulsazione ω 0 di risonanza e il valore della
resistenza R che, in condizioni di risonanza, renda il valore efficace della tensione
ai capi dell’induttore 40 volte maggiore del valore efficace della tensione di
alimentazione. Si supponga, poi, di collegare un generatore di corrente ai nodi A e
204 - Circuiti elettrici in evoluzione dinamica
B, e che entrambi i generatori funzionino alla pulsazione ω 0. In tali condizioni, si
valutino le potenze, attiva e reattiva, erogate dal generatore di corrente.
R
A
+
e(t)
L
j(t)
−
B
C
Assumiamo che e(t) = 10 2 sen(ω 0t), j(t) = 400 sen(ω0t - π/4), L = 5 nH, C = 2 µF.
La pulsazione di risonanza di un circuito R-L-C serie si trova imponendo la
condizione (uguaglianza tra reattanza induttiva e reattanza capacitiva):
XL = X C → ωL = 1 → ω 0 = 1 = 10 Mrad/s f0 ≅ 1.592 MHz .
ωC
LC
Operando in condizioni di risonanza, il valore di R si troverà imponendo che il
modulo della tensione ai capi dell’induttore valga
VL = ω 0 L I = ω 0 L E = 40 E ,
R
che implica immediatamente
R = ω 0L = 1.25 mΩ .
40
Colleghiamo alla rete anche il generatore di corrente e applichiamo il metodo
fasoriale, ponendo XL = ω 0L = 50 mΩ = X C, e
e(t) → E = 10 , j(t) → J = 200 2 , - π = 200 - 200 j .
4
205 - Circuiti elettrici in evoluzione dinamica
I
R
A
I+J
+
E
XL
−
J
B
XC
Si scriva la seconda legge di Kirchhoff alla maglia costituita dal generatore di
tensione, R, XL e XC
E = R I + j XL I + J - j XC I = R I + j XL J ,
ovvero, esplicitando la corrente I,
I = E - j XL J = 10 - 0.05 j (200 - 200 j) = - 8000 j .
R
1.25 10-3
Per valutare la potenza complessa erogata dal generatore di corrente, definita
come
PJ-ero = PE + j QE = VAB J * ,
bisogna calcolare la tensione VAB, che è pari a
VAB = j XL I + J = 410 + 10 j .
In definitiva
PJ-ero = (410 + 10 j) (200 + 200 j) = 80000 + 84000 j ,
ovvero PE = 80 kW e QE = 84 kVAr.
8.2.2 Risonanza parallelo
206 - Circuiti elettrici in evoluzione dinamica
Del tutto equivalente è il caso del circuito RLC parallelo, a volte detto anche
circuito antirisonante (Figura 8.7).
1
+
i(t)
v(t)
iR(t)
iL(t)
R
L
iC(t)
C
−
0
Figura 8.7: circuito RLC parallelo.
In esso la corrente erogata dal generatore, che è somma delle tre correnti
rispettivamente nel resistore, nell’induttore e nel condensatore, si riduce ad essere
uguale alla sola corrente nel resistore perché le altre due si compensano
perfettamente, essendo uguali ed opposte.
IL = V
j XL
V= R I
I
IC =
V
- j XC
Figura 8.8: diagramma fasoriale di un circuito RLC parallelo in antirisonanza.
Le correnti nell’induttore e nel condensatore si calcolano, poi, agevolmente come
rapporto tra tensione applicata e relativa impedenza (Figura 8.8).
Esaminiamo in qualche dettaglio quanto detto per un circuito RLC parallelo che
funzioni in condizioni di antirisonanza. Con riferimento alla Figura 8.7,
introduciamo innanzitutto il fasore che rappresenta la corrente i(t) erogata dal
generatore:
i(t) = I 2 sen(ωt) → I = I .
(8.12)
207 - Circuiti elettrici in evoluzione dinamica
In generale, la LKC impone il seguente legame tra le correnti:
I = IR + IL + IC ,
Questa ultima relazione, in condizioni di risonanza, diventa
I = IR → V = R I = R I , 0
→ v(t) = R I 2 sen(ωt) ,
(8.13)
da cui discende immediatamente che pulsazione, come nel caso di circuito serie già
esaminato, vale
IL + IC = 0 →
V - V = 0 → XL = XC → ω0 = 1 .
j XL j XC
LC
Inoltre, si può scrivere che
C ,-π ,
L
2
IL = - IC = V = R I = R LC I = R I
j XL j ω 0 L
jL
che, in termini di funzioni sinusoidali, significa
iL(t) = R I
C
L
2 sen ω 0t - π = - R I
2
C 2 cos(ω 0t) .
L
(8.14)
Prima di procedere oltre esaminiamo le affinità con il circuito serie. Diremo che
il circuito è in condizioni di antirisonanza quando l’ammettenza diventa un numero
complesso puramente reale, privo della parte immaginaria (suscettanza nulla),
simbolicamente:
Y = 1 + j BC - BL
R
→ ℑ Y =0.
Le relazioni (8.13) e (8.14) ci consentono di calcolare l’energia totale
immagazzinata nei due elementi a memoria, cioè nel condensatore e nell’induttore,
rispettivamente. Posto, allora, U0 = C R2 I2, risulta:
UL(t) = 1 L i2L(t) = 1 L R2 I 2 C 2 cos2(ω 0t) = U0 cos2(ω 0t) ,
2
2
L
(8.15)
UC(t) = 1 C v 2(t) = 1 C R2 I 2 2 sen2(ω 0t) = U0 sen2(ω 0t) .
2
2
(8.16)
208 - Circuiti elettrici in evoluzione dinamica
1.2
Energia / U0
U0 = C R2 I2
Totale
1
0.8
0.6
0.4
L
C
0.2
ω0t
0
0
1
2
3
4
5
6
Figura 8.9: energie immagazzinate al variare del tempo.
Ora, se ricordiamo l’identità
nell’Appendice del Capitolo 7)
trigonometrica
fondamentale
(discussa
sen2 x + cos2 x = 1 ,
concludiamo che l’energia totale immagazzinata nei due bipoli è costante nel tempo
e vale:
U(t) = UC(t) + UL(t) = U0 .
(8.17)
In Figura 8.9 abbiamo rappresentato, in forma adimensionale, le tre precedenti
energie: nel ‘cappio’ LC si dice che si sono instaurate delle oscillazioni persistenti,
cioè che continuano indefinitamente nel tempo senza attenuarsi.
Esempio 2 - Per il circuito mostrato in figura, verificate che la frequenza di
risonanza è pari a ω0 = 1/ LC .
209 - Circuiti elettrici in evoluzione dinamica
R
1
2
+
e(t)
L
C
−
i(t)
0
Se provate a scrivere il valore efficace della corrente i(t), otterrete:
I(ω) = E
R
1
1+
Q2
ω2
ω2 - ω20
,
2
in cui abbiamo introdotto il fattore di merito
Q= 1
R
L .
C
Per comprendere come varia con la frequenza il modulo della corrente,
riferiamoci al grafico che segue, in cui abbiamo scelto R = 1 Ω, L = 1 mH e
C = 1 mF. Da esso si evince chiaramente quanto segue:
R I(ω) ≅ 1 , alle basse frequenze;
E
R I(ω) ≅ 1 , alle alte frequenze .
E
• Si potevano prevedere questi comportamenti asintotici?
Questi due comportamenti ‘estremi’ si possono spiegare facilmente osservando
che, alle basse frequenze, il condensatore si comporta come un circuito aperto e
l’induttore come un corto circuito, mentre, alle alte frequenze, i due
comportamenti limite si invertono. Inoltre, la figura suggerisce pure che il
circuito si comporta come un ‘elimina banda’ dato che il valore normalizzato della
corrente è quasi sempre unitario tranne in una regione più o meno piccola attorno
alla frequenza di risonanza in cui diventa nulla. Non dovrebbe risultarvi troppo
complicato comprendere quanto detto poiché è l’esatto complementare del circuito
210 - Circuiti elettrici in evoluzione dinamica
RLC serie che si comporta come un ‘passa banda’. Domandatevi, infine: cosa
succede se cambia il fattore di merito?
1
R I(ω)
E
0.8
0.6
0.4
ω0 = 1 krad/s
Q=1
0.2
ω
ω0
0
0
1
2
3
4
5
• Spice può aiutarci a fare grafici come questo?
La risposta è affermativa. Basta ricordare quanto abbiamo accennato nel Capitolo
7 quando spiegammo il significato dei vari campi dell’istruzione ‘.AC’.
Per comprendere fino in fondo quel che stiamo per dire, conviene anzitutto
scrivere il file Spice per simulare il circuito. Allora supponiamo che il generatore
di tensione sia, ad esempio, del tipo
e(t) = E cos(ωt) , con E = 1 V .
Esempio 2
*Analisi in frequenza di una rete
VE
1
0
AC
1
0
R0
1
2
1
L0
2
0
1m
C0
2
0
1m
.AC LIN
1001
0.1
1000.1
.PROBE
.PRINT AC
I(R0)
.END
211 - Circuiti elettrici in evoluzione dinamica
Ricordate che Spice adotta le funzioni cosinusoidali per la rappresentazione nel
dominio del tempo. Il file, allora, è, qui di seguito, riassunto.
Considerate l’istruzione ‘.AC’; essa è del tipo
.AC
LIN
NP
FSTART
FSTOP
in cui ‘LIN’ ci informa che la scansione in frequenza, su NP = 1001 punti, tra
FSTART = 0.1 Hz e FSTOP = 1000.1 Hz, è lineare con passo
FSTEP = FSTOP - FSTART = 1000.1 - 0.1 = 1 Hz .
NP - 1
1001 - 1
In termini più semplici, Spice risolve 1001 volte il circuito: la prima volta alla
frequenza di 0.1 Hz, la seconda a 1.1 Hz, la terza a 2.1 Hz, e così via fino a
1000.1 Hz.
• Come facciamo a visualizzare i risultati ottenuti?
I risultati dell’analisi AC possono essere mostrati in un grafico mediante il ‘postprocessore’ grafico Probe, di solito distribuito insieme a Spice.
L’istruzione ‘.PROBE’, contenuta nel file di ingresso, richiede al compilatore di
creare un nuovo file in uscita, che verrà individuato con l’estensione ‘.DAT’, che
contiene tutti i dati delle elaborazioni effettuate. Un tale file può essere letto dal
processore grafico che è in grado di produrre grafici di alta qualità sulla base dei
dati forniti da Spice. Con un po’ di pratica riprodurrete il grafico che vi abbiamo
dato prima e scoprirete che Probe presenta una gamma di possibilità veramente
vasta. Come sempre, la pratica ha un ruolo insostituibile e non è possibile spiegare
ciò che pochi minuti di lavoro rendono semplice.
8.3 Rifasamento
È sotto gli occhi di tutti che il trasporto dell’energia elettrica, dai luoghi di
produzione fino a quelli di utilizzazione, avviene per mezzo di lunghe linee (che,
come vedremo più avanti sono di tipo trifase), lungo le quali l’energia viaggia per
molte centinaia di chilometri nel nostro paese, attraversandolo da nord a sud.
Uno dei pregi maggiori dell’energia elettrica è la trasportabilità, cioè il fatto che
essa viene portata dai luoghi di generazione (dalle cosiddette centrali) a quelli di
utilizzazione (le nostre case, i luoghi di lavoro, e così via) senza apprezzabili
212 - Circuiti elettrici in evoluzione dinamica
perdite. Il sistema di trasporto è, in altri termini, molto efficiente realizzando una
trasmissione che non comporta eccessive perdite. Si calcola che circa il 12%
dell’energia prodotta viene dissipata in calore nel trasporto, a volte anche molto
lungo, sulle linee di trasmissione.
I
V
+
V
−
Z
ϕ
I
Figura 8.10: generico utilizzatore di tipo ohmico-indutttivo.
Quando studieremo gli impianti elettrici ci renderemo conto meglio del fatto che,
allo scopo di ridurre le perdite per effetto Joule, è conveniente realizzare una
trasmissione dell’energia elettrica che impegni correnti di valore quanto più basso
possibile. Allora, per comprendere in maniera semplice come ciò possa
realizzarsi, consideriamo un generico utilizzatore, mostrato in Figura 8.10, che
per funzionare correttamente ha bisogno che il valore efficace della tensione ai
suoi capi sia fissato.
La maggior parte delle apparecchiature industriali si possono schematizzare con
dei carichi ohmico-induttivi e, pertanto, la corrente sarà in ritardo rispetto alla
tensione o, equivalentemente (ricordate che le reattanze sono da intendersi sempre
come numeri positivi),
Z=R+jX.
Ciò non vuol dire che nella pratica non si trovino anche carichi di tipo ohmicocapacitivo; quelli induttivi sono, però, di gran lunga più diffusi. Inoltre le cose che
diremo, con piccole modifiche, si applicano anche ai carichi di tipo capacitivo.
In questo paragrafo, vogliamo imparare a rifasare un carico che vuol dire, in
ultima analisi, ridurre il valore efficace della corrente che interessa il carico
lasciando, però, invariate sia la tensione sul carico, sia la potenza attiva da esso
assorbita.
Per fare ciò, possiamo procedere come suggerito dalla Figura 8.11: per ridurre il
modulo della corrente, a tensione bloccata, possiamo aggiungere alla corrente di
linea I una corrente IC che la riduca al valore I'. Ora, la corrente IC deve essere in
213 - Circuiti elettrici in evoluzione dinamica
anticipo di 90° rispetto alla tensione V e ciò può realizzarsi mediante un opportuno
condensatore posto in parallelo al carico. Si ha, allora:
I' = I + j ω C V .
(8.18)
Se supponiamo che la tensione V sia concorde con l’asse reale, la relazione
complessa (8.18) diventa equivalente alle due reali:
I' cos ϕ' = I cos ϕ ,
(8.19)
- I' sen ϕ' = - I sen ϕ + ω C V .
La prima delle relazioni (8.19) ci dice che stiamo lavorando a parità di potenza
attiva assorbita dal carico; moltiplicando, infatti, membro a membro per il valore
efficace V della tensione risulta:
V I' cos ϕ' = V I cos ϕ → P' = P .
I'
IC
I
IC
XC
(8.20)
ϕ'
+
V
−
V
Z
ϕ
I'
IC
I
Figura 8.11: condensatore di rifasamento.
La seconda relazione (8.19) deve fornirci il valore della capacità C che consente la
riduzione dell’angolo della corrente da ϕ a ϕ', realizzando quello che è
tecnicamente conosciuto come il rifasamento del carico Z. Moltiplicando ancora
per V, essa diventa:
- V I' sen ϕ' = - V I sen ϕ + ω C V 2 → Q - Q' = ω C V 2 ,
(8.21)
in cui Q è la potenza reattiva assorbita dalla sola impedenza di carico, mentre Q' è
quella assorbita dal carico e dal condensatore di rifasamento.
214 - Circuiti elettrici in evoluzione dinamica
La Figura 8.12 ci ricorda il cosiddetto triangolo delle potenze dal quale, per sola
ispezione, si può ricavare un legame tra potenza attiva P e reattiva Q. Pertanto,
eliminando dalla (8.21) le potenze reattive e osservando che per la (8.20) è P = P',
possiamo, in definitiva, scrivere che
Q - Q' = ω C V2 = P tan ϕ - P' tan ϕ' = P (tan ϕ - tan ϕ') ,
dalla quale si ricava immediatamente il valore della capacità che rifasa il carico
fino all’angolo ϕ'
C=
P (tan ϕ - tan ϕ') .
ω V2
(8.22)
Q = P tan ϕ
ϕ
P
Figura 8.12: triangolo delle potenze.
Potremmo essere, a questo punto, indotti a credere che è meglio rifasare un carico
fino a ϕ' = 0, come mostrato in Figura 8.13. Ciò, tuttavia, non è tecnicamente
conveniente per i motivi che andiamo a dire. Le linee di trasporto dell’energia
sono lunghi fili che, in quanto tali, hanno un comportamento di tipo ohmicoinduttivo (in realtà, questa affermazione vi sarà completamente chiara solo dopo
avere studiato i campi elettrici e magnetici). Ciò comporta che, se per qualche
motivo accidentale, il carico varia, anche poco, in modo che la corrente I' anticipa
la tensione V, alla fine delle linee verrà a trovarsi un carico ohmico-capacitivo.
Per quanto detto sulle linee, ciò può creare delle indesiderate risonanze che
possono generare forti sovracorrenti e sovratensioni che possono danneggiare
irreparabilmente l’intero impianto di distribuzione. Per questo motivo l’angolo ϕ'
non si riduce mai a zero; lo renderemo piccolo, ma non nullo.
Questo fatto si esprime dicendo che il coseno di questo angolo deve essere molto
prossimo all’unità, diciamo 0.9 (dire che l’angolo tra tensione e corrente è piccolo
vuol dire che il coseno è vicino all’unità).
215 - Circuiti elettrici in evoluzione dinamica
I'
V
I
ϕ' = 0
IC
Figura 8.13: rifasamento a ϕ' = 0.
Quando studieremo gli impianti elettrici vedremo quale siano i valori fissati dalle
normative vigenti nel nostro e negli altri paesi.
Esempio
3 - Rifasare il carico mostrato
cos ϕ' = 0.9 ϕ' ≅ 0.451 , poi, a cos ϕ' = 1 ϕ' = 0 .
in
figura
prima,
a
I
+
R
V0
XL
−
Si assuma che R = XL = 20 Ω, V0 = 220 V, f = 50 Hz.
La fase dell’impedenza di carico
ϕ = arctan Q = arctan 1 = π
P
4
è positiva, e, come in realtà si verifica nella maggioranza dei carichi industriali,
stiamo considerando un carico ohmico-induttivo. Come abbiamo detto, la potenza
dissipata lungo la linea che collega il carico ai generatori è proporzionale al
quadrato del modulo della corrente, che va tenuto quanto più basso possibile.
Tali perdite possono essere ridotte se, in parallelo al carico, se ne disponesse un
secondo, puramente reattivo, nelle nostre ipotesi, capacitivo, in grado di assorbire
216 - Circuiti elettrici in evoluzione dinamica
una porzione della sola potenza reattiva. In tali condizioni il carico si dirà rifasato
da cosϕ a cosϕ'.
I
+
R
V0
XC
XL
−
In pratica con il rifasamento si evita che l’energia immagazzinata nel carico, che,
come è noto, oscilla tra un punto di massimo ed uno di nullo, venga continuamente
trasferita lungo la linea, avanti ed indietro, con le conseguenti perdite; l’aver
disposto un ‘serbatoio di energia’ in opposizione di fase in prossimità del carico - è
questa appunto la funzione che svolgono i condensatori posti in parallelo al carico
- consente che tale scambio di energia avvenga tra il ‘serbatoio’ ed il carico e non
tra i generatori ed il carico. Il problema del rifasamento si riduce al calcolo della
capacità da disporre in parallelo al carico in modo tale che la fase dell’impedenza
equivalente sia quella desiderata. Essa è
C=
P (tan ϕ - tan ϕ') ,
2πf V 2
dove ϕ è la fase senza il condensatore e ϕ' è quella desiderata.
Cominciamo a calcolare la corrente che circola nel carico quando il condensatore
non c’è (assumendo che la tensione V0 sia a fase nulla):
I=
V0
220
=
= 11 2 , - π .
R + j XL 20 (1 + j)
2
4
Calcoliamo, poi, la potenza media da esso assorbita:
P = V0 I cos π = 1210 W .
4
217 - Circuiti elettrici in evoluzione dinamica
Allora, la capacità deve valere, nel primo caso
C ≅ 41 µF (rifasamento a cos ϕ' = 0.9)
e nel secondo caso
C ≅ 79.6 µF (rifasamento a cos ϕ' = 1) .
Osserviamo che tutti i calcoli svolti sono stati condotti nell’ipotesi che
l’utilizzatore abbia un carattere ohmico-induttivo. Nel caso, per la verità più raro,
in cui si verifichi l’evenienza opposta, cioè ci troviamo a dover operare con un
carico ohmico-capacitivo, occorre disporre in parallelo all’utilizzatore una
induttanza, e bisogna sviluppare considerazioni del tutto simili a quelle appena
sviluppate. Provate voi a verificare che l’induttanza che serve per rifasare questo
tipo di carico vale:
2
1
L= V
.
ω P tan ϕ - tan ϕ'
(8.23)
8.4 Massimo trasferimento di potenza
Discuteremo ora una notevole proprietà delle reti in regime sinusoidale che regola
il trasferimento di potenza da un generatore a un carico. In particolare, con
riferimento alla Figura 8.14, stabiliremo che il massimo trasferimento possibile di
potenza attiva dal generatore al carico si ottiene se la parte reale e quella
immaginaria dell’impedenza di carico verificano le relazioni
R = R0 , X = - X0 ,
(8.24)
in cui Z 0 = R0 + j X0 rappresenta l’impedenza interna del generatore di tensione E.
In questo paragrafo abbandoniamo, per comodità, la regola dataci in questo libro
secondo cui le reattanze sono da intendersi sempre come numeri positivi, anche
nel caso di un condensatore: qui ‘X’ indicherà il valore di una generica reattanza
che, se positiva, rappresenta un induttore, se negativa, un condensatore.
In altri termini, vogliamo sapere quale carico Z dobbiamo collegare alla rete per
ottenere il massimo trasferimento di potenza attiva. Allo scopo, cominciamo a
calcolare la corrente in forma di fasore
218 - Circuiti elettrici in evoluzione dinamica
I=
E =
E
,
R
+
R
+
0 j X + X0
Z + Z0
cui corrisponde un modulo pari a
I=
E
R + R0 2 + X + X 0
2
.
(8.25)
Z 0 = R0 + j X0
+
E
Z=R+jX
−
I
Figura 8.14: generatore collegato ad un generico carico.
La potenza attiva P che assorbe il carico vale:
P = R I2 =
R E2
R + R0 2 + X + X 0
2
.
(8.26)
Ora, dimostrare che la potenza espressa dalla (8.26) è massima proprio quando
sono verificate le condizioni (8.24) non è un affare semplice: è necessario sapere
studiare come si trovano i massimi (e i minimi) di una funzione (P) che dipende
da due variabili indipendenti (R e X). Ciò che è certo, comunque, è che se le
(8.24) sono soddisfatte, la potenza attiva è massima e vale:
2
Pmax = E .
4 R0
(8.27)
Se nelle stesse condizioni di massimo proviamo a calcolare la potenza complessa
erogata dal generatore E, concludiamo che
219 - Circuiti elettrici in evoluzione dinamica
*
2
2
*
PE-max = E I = E E = E (quantità reale) → P E-max = E .
2 R0 2 R0
2 R0
(8.28)
Ora, se consideriamo il rapporto tra la potenza attiva assorbita dal carico e quella
erogata dal generatore, possiamo calcolare il rendimento
rendimento → η =
P
PE-max
= 0.5 ,
(8.29)
e concludere che soltanto il 50% della potenza erogata viene assorbita dal carico.
E ciò è il meglio che, al momento, possiamo fare: l’altro 50% viene dissipato nella
resistenza interna del generatore. Quando studieremo le macchine elettriche, e il
trasformatore in particolare, scopriremo che è possibile aggirare questo pesante
vincolo. La condizione (8.24) che può anche essere riscritta nella forma più
compatta
*
Z = R + j X = R0 - j X0 = Z 0 ,
(8.30)
è anche conosciuta come condizione di adattamento, volendo sottolineare il
fatto che, se la condizione (8.30) è verificata, ci troviamo nelle condizioni di
adattamento del carico alla sorgente la quale trasferisce ad esso il massimo
possibile di potenza attiva.
Esempio 4 - Si valuti l’indicazione fornita dal wattmetro W nella rete di figura,
funzionante in regime sinusoidale, quando il carico Z soddisfi la condizione di
adattamento.
j(t)
X1
C
+
+
W
R3
A
IZ
+
R2
e(t)
Z
−
X2
B
R1
D
X3
220 - Circuiti elettrici in evoluzione dinamica
Si assuma che e(t) = E sen(ωt), E = 100 2 V, j(t) = J sen(ωt - π/4), J = 20 A,
R1 = R2 = 10 Ω, R3 = 3.75 Ω, X1 = X2 = 5 Ω, X3 = 10 Ω.
Il wattmetro fornisce una indicazione formalmente espressa da
*
W = ℜ VCD IZ ,
dove la tensione VCD è legata alla corrente IZ dalla relazione costitutiva
VCD = R3 + Z - jX3 IZ .
Volendo conoscere l’indicazione del wattmetro, è sufficiente valutare la sola
corrente IZ, la quale può essere calcolata adoperando il teorema di Thévenin, come
suggerisce lo schema che segue.
ZE
A
IZ
+
E0
Z
−
B
Si vuole, in altre parole, applicare il teorema del generatore equivalente per
trasformare l’intera rete a monte dei morsetti A-B in un generatore di tensione E 0
e in un’impedenza equivalente Z. In tal modo, la corrente IZ sarà pari a
IZ =
E0 ,
Z + ZE
e il problema potrà dirsi risolto. Osserviamo pure che trovandoci in condizioni di
adattamento, cioè di massima potenza attiva trasferita al carico Z, deve essere
*
Z = ZE ,
221 - Circuiti elettrici in evoluzione dinamica
e la precedente relazione si semplifica ulteriormente
IZ =
E0
.
2 ℜ ZE
Si cominci a calcolare Z E, rendendo passiva la rete. Risulta, allora,
Z E = R 3 - jX3 + R1 + jX1 || R2 - jX2 = 10 (1 - j) Ω ,
da cui si ottiene immediatamente
*
Z = Z E = 10 (1 + j) Ω .
R3
X1
A
R2
X2
B
R1
X3
Veniamo al calcolo della tensione a vuoto E 0. Dato che attraverso la resistenza R3
e la reattanza X3 non passa corrente a circuito aperto, lo schema si semplifica
come indicato di seguito, e si evince che
E = R1 + jX1 I + R2 - jX2 I + J .
Trasformando le sinusoidi nei fasori corrispondenti
e(t) → E = 100 V , j(t) → J = 10 2 , π = 10 (1 - j) A ,
4
la corrente I vale
222 - Circuiti elettrici in evoluzione dinamica
I=
E - R2 - jX2 J
= (2.5 + 7.5j) A .
R1 + R2 + j X1 - X2
X1
C
J
+
I
+
R2
E
E0
I+J
−
X2
−
R1
D
J
Pertanto, la tensione a vuoto vale
E 0 = R2 - jX2 I + J = (112.5 - 87.5j) V .
Tornando al circuito di partenza, la corrente IZ risulta
IZ =
E0
= (5.625 - 4.375j) A ,
2 ℜ ZE
e, in definitiva, l’indicazione del wattmetro è
W = ℜ VCD IZ* = ℜ R3 + Z - jX3 I2Z = R3 + ℜ Z I2Z .≅ 698.24 W .
Si fa notare esplicitamente che l’indicazione fornita dal wattmetro ha un preciso
significato fisico: coincide con la potenza attiva assorbita dalla serie di R3, Z e X3.
223 - Circuiti elettrici in evoluzione dinamica
Appendice: bipoli passivi reali
Si è già avuto modo di sottolineare più volte che i bipoli introdotti costituiscono
sempre una rappresentazione, più o meno approssimata, dei bipoli reali. Con
riferimento al regime sinusoidale (in altre condizioni di funzionamento le
considerazioni possono essere diverse) faremo ora qualche cenno alla
corrispondenza fra bipoli reali e bipoli ideali che li rappresentano; per le
induttanze mutue svilupperemo considerazioni analoghe nel volume dedicato alle
macchine elettriche, quando approfondiremo il funzionamento del trasformatore.
Per comprendere fino in fondo ciò che diremo in questo paragrafo, è necessario
avere qualche conoscenza dei campi elettrici e magnetici. Pertanto, nel volume
dedicato allo studio di questi campi, approfondiremo alcuni aspetti che potrebbero
risultare poco chiari ed alcune affermazioni che faremo in quel che segue
diverranno completamente chiare solo dopo aver studiato alcuni aspetti fisici legati
alla definizione dei condensatori e degli induttori. Non perdete, dunque, la
pazienza se non tutto vi sarà chiaro; fidatevi e memorizzate quanto diremo. Più
avanti ... tutto si illuminerà.
Una cosa da sottolineare subito è che, fissata una frequenza oppure un intervallo di
frequenze di funzionamento, un certo bipolo reale può essere considerato un
resistore, un induttore oppure un condensatore, solo in maniera approssimata: i
termini resistore, induttore e condensatore indicano un bipolo reale che ha
caratteristiche prevalentemente resistive, induttive oppure capacitive, ma che, a
voler essere precisi, mostra un comportamento ben più complesso di quello che
suggerisce il suo nome.
Resistore
La maniera più semplice di realizzare un resistore è quella di avvolgere un filo su
un supporto (Figura A.1).
Figura A.1: filo avvolto per formare un resistore.
Come sappiamo già, il filo presenta una resistenza che dipende dalla sua lunghezza,
dalla sezione e dal materiale di cui è costituito. È pure vero che il resistore può
anche essere considerato come un solenoide a cui si può associare un’induttanza, e,
224 - Circuiti elettrici in evoluzione dinamica
se si considera una coppia di spire contigue, si può osservare che queste possono
essere considerate come armature di un condensatore, cui si può associare una
capacità. In definitiva, mentre uno studio molto preciso e completo, valido a tutte
le frequenze, del comportamento del sistema richiederebbe l’analisi del campo
elettrico e del campo magnetico che si generano al passaggio della corrente,
limitando lo studio ad un intervallo ristretto di frequenze, il sistema può
essere rappresentato con il circuito equivalente di Figura A.2, dove la capacità è
stata considerata concentrata agli estremi del bipolo. È chiaro che, a una ben
precisa frequenza, il bipolo è poi ulteriormente semplificabile con uno schema
equivalente serie (o parallelo), mettendo in evidenza due soli parametri; la parte
resistiva è preponderante e la parte reattiva è induttiva o capacitiva, secondo la
prevalenza dell’uno dell’altro effetto parassita. È appena il caso di accennare
che, entro una data approssimazione, per allargare il campo di frequenze entro cui
è valido il circuito equivalente, bisogna complicare sempre più, richiedendo un
numero di parametri sempre maggiore.
Induttore
Fisicamente si può pensare a un solenoide, cioè a un sistema come quello di Figura
A.1. Data la perfetta analogia, valgono le considerazioni già fatte per il resistore;
un circuito equivalente, valido in un campo ristretto di frequenze, è quello già
visto in Figura A.2, dove, l’effetto induttivo è, ovviamente, preponderante.
C
R
L
Figura A.2 circuito equivalente di un resistore reale.
Non si ritiene opportuno approfondire qui i problemi connessi con la presenza di
un nucleo di ferro: basti accennare al fatto che, non tenendo conto dei fenomeni di
non linearità necessariamente presenti, si può sempre, ad una data frequenza,
rappresentare l’induttore con un circuito equivalente semplificato, come quello
mostrato in Figura A.3.
225 - Circuiti elettrici in evoluzione dinamica
Per indicare l’entità della parte resistiva parassita si utilizza spesso, invece che la
resistenza R, un altro parametro, detto angolo di perdita δ, definito come
tan δ = R .
ωL
R
L
Figura A.3: circuito equivalente semplificato di un induttore reale.
Quanto più piccolo è l’angolo di perdita, tanto più ideale sarà il comportamento
dell’induttore. L’inverso della tangente dell’angolo di perdita viene detto fattore
di qualità (o coefficiente di merito)
Q=
1 = ωL ,
tan δ
R
e rappresenta un altro parametro largamente usato nella letteratura tecnica. Il
fattore Q fornisce il rapporto fra le potenze attiva e reattiva assorbite dal bipolo.
È importante sottolineare, infine, che al variare della frequenza variano, in
generale, i parametri che caratterizzano l’induttore; tuttavia, l’induttanza
equivalente varia percentualmente di meno dell’angolo di perdita, o della
resistenza equivalente.
Condensatore
La presenza di un dielettrico non perfettamente isolante e di elementi conduttori
non perfettamente conduttivi spiega la presenza di una componente resistiva nel
circuito equivalente che rappresenta un condensatore ideale; la presenza di un
campo magnetico, e quindi di un flusso concatenato con un circuito di cui il
condensatore è parte (non approfondiamo qui la questione), giustifica la presenza
di un’induttanza. Un circuito equivalente frequentemente adottato valido per un
certo campo di frequenze, è quello di Figura A.4. Anche in questo caso,
comunque, è possibile considerare un circuito più semplificato, eliminando la
resistenza R0 e l’induttanza L 0.
In funzione di R e di C (oltre che di ω) sono, anche in questo caso, definiti
l’angolo di perdita δ
tan δ = ω R C ,
226 - Circuiti elettrici in evoluzione dinamica
e il fattore di qualità Q
Q=
1 = 1 .
tan δ ω R C
C
R0
L0
R
si possono eliminare
nel circuito semplificato
Figura A.4: circuito equivalente (e semplificato) di un condensatore reale.
Anche per il condensatore è opportuno sottolineare che i parametri sono variabili
con la frequenza, specialmente quelli direttamente rappresentativi degli elementi
parassiti.
227 - Circuiti elettrici in evoluzione dinamica
Capitolo 9
Sistemi trifasi
9.1 Introduzione
9.2 Sistemi trifasi
9.2.1 Disposizione dei generatori
9.2.2 Disposizione degli utilizzatori
9.3 Collegamenti fra generatori e utilizzatori
9.4 Esame dei diversi tipi di configurazione
9.4.1
9.4.2
9.4.3
9.4.4
9.4.5
Collegamento
Collegamento
Collegamento
Collegamento
Collegamento
stella-stella
stella-stella con neutro
stella-triangolo
tringolo-stella
triangolo-triangolo
9.5 Un primo vantaggio dei sistemi trifasi
9.6 Potenze nei sistemi trifasi
9.6.1 Centro stella accessibile
9.6.2 Centro stella inaccessibile
9.6.3 Sistema trifase equilibrato
9.7 Rifasamento dei sistemi trifasi
9.8 Altri vantaggi dei sistemi trifasi
9.9 Conclusioni
228 - Circuiti elettrici in evoluzione dinamica
Appendice: impianti di distribuzione
Sommario
I generatori elettrici e gli utilizzatori che fino a questo momento
abbiamo usato nel nostro studio dei circuiti elettrici hanno avuto, tra le
varie caratteristiche, quella di presentare sempre solo due morsetti. E
proprio da questa loro particolarità vien fuori il termine ‘bipolo’.
In questo capitolo apriremo una finestra su quella che si chiama
elettrotecnica industriale in cui i generatori elettrici e gli utilizzatori,
salvo casi eccezionali, sono dotati di più di due morsetti. Si dice in gergo
che essi danno luogo a un sistema polifase, anziché monofase. La ragione
di questa apparente complicazione troverà una prima parziale
giustificazione nelle pagine seguenti.
229 - Circuiti elettrici in evoluzione dinamica
9.1 Introduzione
Negli ultimi due capitoli abbiamo dato il meritato risalto alle reti che operano in
regime sinusoidale; una rete del genere viene, in gergo, detta rete sinusoidale
monofase. L’attributo ‘monofase’ sottolinea il fatto che l’energia elettrica viene
portata dal generatore ad un generico carico per mezzo di due conduttori: uno
attraverso cui la corrente raggiunge il carico ed un altro di ritorno. La grande
maggioranza degli impianti elettrici domestici offre il più tipico esempio di
sistema monofase: nell’alloggio giungono due fili, provenienti da una vasta e
ramificata rete di distribuzione dell’energia. Con la mentalità ormai formata
attraverso la considerazione e l’uso del teorema di Thévenin, i due fili che
giungono ad alimentare le utenze elettriche di un’abitazione possono essere
considerati gli estremi di un bipolo equivalente, costituito da un generatore ideale
di tensione e da un’opportuna impedenza. Nella pratica, tuttavia, l’energia elettrica
non viene né prodotta, né trasportata alle varie utenze in questa maniera.
Questo ultimo capitolo è dedicato allo studio dei sistemi trifasi. L’importanza di
tale studio risiede nel fatto che la produzione, la trasmissione e la distribuzione
dell’energia elettrica avvengono quasi totalmente sotto forma di grandezze
alternate trifasi, sia per motivi tecnici, sia per motivi economici.
Quando studieremo le macchine elettriche mostreremo che quelle trifasi, a parità
di potenza e tensione ai morsetti, presentano minor peso e sono meno ingombranti
rispetto alle macchine monofase o in corrente continua. Inoltre, le linee elettriche
trifasi utilizzate nella trasmissione e nella distribuzione dell’energia elettrica
presentano cadute di tensione più basse rispetto alle linee monofase a parità di
lunghezza della linea, e possono essere realizzate con sezioni dei conduttori più
piccole. Le linee trifasi, infatti, consentono, a parità di lunghezza e di carico
servito, un risparmio di circa il 25% sul peso di rame impiegato rispetto a una
corrispondente linea monofase. Quanto detto non deve far dimenticare, tuttavia,
che la corrente continua e la corrente alternata monofase trovano ancora oggi
impiego in alcune importanti applicazioni, quali la trazione elettrica, la
trasmissione dell’energia elettrica a grande distanza (alta tensione continua) e, alla
già ricordata, alimentazione di piccole utenze.
Ma procediamo con ordine e cerchiamo di capire cosa si intende per sistema
trifase.
9.2 Sistemi trifasi
230 - Circuiti elettrici in evoluzione dinamica
La grande maggioranza degli impianti elettrici industriali non costituisce un
sistema monofase. Se vogliamo considerare gli apparecchi utilizzatori, senza
necessariamente sapere come sono fatti al loro interno, essi si presentano come
mostrato in Figura 9.1.
1
2
U
3
0
Figura 9.1: generico utilizzatore industriale.
Essi sono costituiti da tre (a volte quattro) morsetti, indicati con 1, 2 , 3 (e 0), e
funzionano in maniera corretta solo se vengono collegati ad altrettanti morsetti di
alimentazione, generalmente nel medesimo ordine (Figura 9.2). In realtà, esiste
anche il quinto filo, detto fune di guardia, del quale qui ci disinteresseremo, ma
che è molto utile per la protezione della linea di trasmissione dell’energia dalle
fulminazioni indirette.
1
G
+
2 − V12
+
3 − V23
0
−
I1
I2
U
I3
+ V
31
I0
Figura 9.2: collegamento trifase tra un generatore e un carico.
I morsetti 1, 2 e 3 sono detti morsetti di fase e devono essere collegati ai rispettivi
morsetti di fase del sistema di alimentazione. Il morsetto 0, quando esiste, deve
essere collegato al rispettivo morsetto 0 del sistema di alimentazione: tale morsetto
(o conduttore) viene detto di (o del) neutro.
231 - Circuiti elettrici in evoluzione dinamica
Le tensioni applicate all’apparecchio U dal generatore trifase, V12, V23 e V31,
hanno generalmente un identico valore efficace (V) e sono indicate, in gergo,
come tensioni concatenate:
V12 = V23 = V31 = V .
Quando, invece, riferiamo le tensioni al neutro, considerando la terna V10, V20 e
V30, parleremo di tensioni di fase (o stellate) che hanno anch’esse lo stesso
valore efficace (E):
V10 = V20 = V30 = E .
Le tre correnti I1, I2 e I3 sono chiamate correnti di linea e, come preciseremo
più avanti, non è detto che esse abbiano lo stesso valore efficace. Infine, I0 è la
corrente che attraversa il filo del neutro.
9.2.1 Disposizione dei generatori
Cerchiamo di capire, per quanto possibile, come è fatto un generatore trifase.
Come sarà più chiaro quando studieremo le macchine elettriche, un generatore
trifase è un sistema elettrico capace di sostenere tre tensioni sinusoidali. Più
precisamente, esso genera una terna di tensioni che, se il sistema è ben progettato,
è pressoché simmetrica. Intendiamoci bene su questi nuovi termini introdotti.
E1
−
+
E2
−
+
E3
−
1
+
−
V12
2
+
3
0
Figura 9.3: disposizione a stella dei tre generatori.
232 - Circuiti elettrici in evoluzione dinamica
Consideriamo il sistema dei tre generatori collegati a stella mostrati in Figura 9.3,
detto generatore ideale trifase di tensione; in questa figura, per non complicare
inutilmente il disegno, abbiamo riportato la sola tensione concatenata V12, non
rappresentando le altre. Le tre tensioni stellate siano rappresentate dalle funzioni
sinusoidali
e1(t) = E 2 sen(ωt) ,
(9.1)
e2(t) = E 2 sen(ωt - 2π/3) ,
e3(t) = E 2 sen(ωt - 4π/3) ,
o, in maniera equivalente, dai corrispondenti tre fasori E 1, E 2 e E 3. Si tratta
(Figura 9.4) di tre vettori complessi aventi lo stesso valore efficace E, e definiti
dalle relazioni
E1 = E , 0 = E ,
E 2 = E , - 2 π = E cos 2 π - j E sen 2 π =
3
3
3
E 3 = E , - 4 π = E cos 4 π - j E sen 4 π =
3
3
3
-E-jE
2
-E+jE
2
3 ,
2
3 .
2
Tenete presente che un terzo di angolo giro può indicarsi come
1 360° = 120° = 2 π ,
3
3
e che valgono le relazioni trigonometriche
cos 2 π = cos 4 π = - 1 e sen 2 π = - sen 4 π = 3 .
3
3
2
3
3
2
(9.2)
233 - Circuiti elettrici in evoluzione dinamica
ℑ
E3
E1
ℜ
0
E2
Figura 9.4: rappresentazione fasoriale di una terna diretta.
Quando accade che tre fasori hanno lo stesso valore efficace e sono sfasati tra loro
di 120° diremo che essi costituiscono una terna trifase; in particolare se, come è
nel nostro caso, ci stiamo riferendo al generatore, la terna si dice simmetrica. In
caso contrario, cioè se le tre tensioni non hanno lo stesso valore efficace, o non
sono mutuamente sfasate di 120°, la terna viene detta dissimetrica.
ℑ
E2
E1
0
ℜ
E3
Figura 9.5: terna simmetrica inversa.
Una terna simmetrica di tensioni può essere, poi, inversa o diretta. Se, assunto
quale verso di riferimento per la misura degli angoli quello antiorario, la tensione
E 1 è in anticipo sulla tensione E 2 e quest’ultima è in anticipo sulla E 3, la terna è
detta diretta. In Figura 9.4 abbiamo rappresentato una terna diretta. In caso
contrario, come suggerisce la Figura 9.5, la terna viene detta inversa.
234 - Circuiti elettrici in evoluzione dinamica
Nel seguito ci riferiremo quasi esclusivamente a terne dirette, anzi la parola terna
senza aggiunta di altri attributi sarà sinonimo di terna diretta.
Osserviamo subito che per una terna simmetrica, vale la relazione:
e1(t) + e2(t) + e3(t) = 0 , in ogni istante di tempo.
(9.3)
Per verificare la (9.3) usiamo la rappresentazione fasoriale (9.2). Possiamo,
allora, scrivere:
E1 + E2 + E3 = E - E - j E 3 - E + j E 3 = 0 .
2
2 2
2
Per sincerarvi fino in fondo della proprietà appena dimostrata, provate ad usare la
Figura 9.6 e a sommare in un istante da voi scelto le tre funzioni sinusoidali:
troverete sempre zero, quale che sia l’istante di tempo considerato.
1.5
e1(t)
1
e2(t)
e3(t)
0.5
ωt
0
-0.5
-1
-1.5
0
2
4
6
8
10
Figura 9.6: le tre funzioni sinusoidali (9.1).
Spesso ciò che interessa non è tanto la terna di tensioni stellate (inaccessibile nelle
macchine reali) ma la terna di tensioni concatenate. La cosa è semplice dato che
non è difficile passare da una terna stellata di tensioni alle corrispondenti
concatenate. Dalla Figura 9.3 discende immediatamente che
235 - Circuiti elettrici in evoluzione dinamica
V12 = E 1 - E 2 , V23 = E 2 - E 3 , V31 = E 3 - E 1 .
(9.4)
La Figura 9.7 rappresenta graficamente le tre relazioni (9.4).
E3 3
V31
V23
0
1 E1
V12
E2 2
Figura 9.7: la terna di tensioni concatenate.
Tentiamo di capire se questa costruzione grafica ci può essere di aiuto nel calcolo
delle tre tensioni concatenate, a partire dalle stellate. Cominciamo con la prima:
V12 = E 1 - E 2 .
Ciò che potremmo immediatamente fare è sostituire al posto delle due tensioni
stellate le rispettive definizioni e, poi, farne la differenza. Osserviamo, invece, la
Figura 9.7 o, meglio ancora, il dettaglio di essa riprodotto in Figura 9.8.
E3 3
V23
30°
0
1 E1
V12
E2 2
30°
Figura 9.8: dettaglio della Figura 9.7.
Il triangolo 1-2-0, di base V12 e lati E 1 e E 2, è isoscele dato che E 1 = E 2 = E. Ora,
essendo 102 = 120° , i due angoli alla base sono pari a 30°. Ciò comporta,
tracciando l’altezza relativa alla base V12, che
236 - Circuiti elettrici in evoluzione dinamica
V12 = E cos 30° = E 3
2
2
→ V12 = E 3 .
La Figura 9.8 suggerisce pure che il fasore V12 è in anticipo di 30° rispetto a E 1
(che è stato assunto, per semplicità, a fase nulla). Allora possiamo finalmente
concludere che
V12 = E 3 , π .
6
Seguendo la stessa linea di ragionamento è possibile ricavare anche le altre due
tensioni concatenate e, pertanto, scrivere che
V12 = E 3 , π = E 3 cos π + j sen π = E 3 + j 3 ,
6
6
6
2
2
V23 = E 3 , - π = E 3 cos π - j sen π = - j E 3 ,
2
2
2
(9.5)
V31 = E 3 , 5 π = E 3 cos 5 π + j sen 5 π = E - 3 + j 3 .
6
6
6
2
2
Le relazioni (9.5) ci forniscono le tre tensioni concatenate ma, cosa più
interessante, il metodo adoperato per dedurle ci fornisce una traccia che più volte
useremo nello studio dei sistemi trifasi.
Vale la pena notare come, anche per le tensioni concatenate, valga la relazione
V12 + V23 + V31 = 0 .
(9.6)
Una terna di generatori come quelli indicati in Figura 9.3, priva di filo di neutro,
può anche essere collegata a triangolo e, in questa configurazione circuitale,
fornirà direttamente le tre tensioni concatenate, come mostra la Figura 9.9.
237 - Circuiti elettrici in evoluzione dinamica
+
V12
−
1
−
2
V31
+
+
V23
−
3
Figura 9.9: disposizione a triangolo dei tre generatori.
In realtà, dei tre generatori a triangolo di questa figura, non tutti sono necessari
per imprimere una terna di tensioni concatenate: se ne potrebbe togliere uno e
nulla cambierebbe quanto alle tensioni. Cambierebbero, invece, le correnti erogate
dai generatori qualora essi alimentassero dei carichi. Questa affermazione, è
appena il caso di accennarlo, si fonda sul fatto che la LKT, applicata alla maglia
costituita dai tre generatori, impone la relazione
V12 = - V23 - V31 ,
sia che esista, sia che non esista il generatore tra i morsetti 1 e 2. Analogamente si
potrebbe dire per le altre due tensioni concatenate facendo ruotare i pedici. Già
nel primo volume abbiamo fatto notare che nel parallelo di due generatori reali
che non forniscono la stessa tensione circola una corrente di valore molto elevato.
Per questo è molto importante che le tre f.e.m. erogate da un triangolo di
generatori soddisfino la relazione (9.6) in modo da evitare assolutamente che
circoli corrente nel triangolo medesimo quando esso non alimenta carichi.
Le tre relazioni (9.5) ci fornivano il valore delle tensioni concatenate noto quello
delle stellate. Volendo trasformare un collegamento a triangolo dei generatori in
uno equivalente a stella, abbiamo bisogno di relazioni che ci forniscano le tensioni
stellate note le concatenate. Da quanto detto in precedenza, posto che le tre
tensioni concatenate siano rappresentate dalle relazioni
V12 = V , α , V23 = V , α - 2 π , V31 = V , α - 4 π ,
3
3
(9.7)
238 - Circuiti elettrici in evoluzione dinamica
(α è una fase generica, introdotta per rendere generali le cose) segue che le tre
stellate sono pari a
E1 = V , α - π , E2 = V , α - 5 π , E3 = V , α + π .
6
6
2
3
3
3
(9.8)
Provate a verificarle da soli, prestando particolare attenzione al caso α = π/6
ricavato in precedenza.
Infine, ritornando al fatto che uno dei generatori del triangolo si può escludere
senza che si modifichino le tensioni concatenate, talvolta si può trovare realmente
qualche generatore trifase con due soli lati del triangolo, anziché tre; il terzo lato,
allora, può essere tranquillamente portato in riparazione o revisione periodica. Si
dice in tal caso che i generatori sono collegati non a triangolo, ma a ‘V’, essendo
V la lettera dell’alfabeto che meglio rappresenta un triangolo a cui è stato tolto un
lato.
Esempio 1 - Si abbia una terna di generatori come quella rappresentata dalle
relazioni (9.2), di valore efficace E = 10 V.
• Verificare che
E1 + E2 + E3 = 0 .
Posto, dunque,
E 1 = 10 , 0 = 10 ,
E 2 = 10 , - 2 π = 5 - 1 - j 3 ,
3
E 3 = 10 , - 4 π = 5 - 1 + j 3 ,
3
risulta:
E 1 + E 2 + E 3 = 10 + 5 - 1 - j 3 + 5 - 1 + j 3 =
= 10 - 5 - 5 - 5 j 3 + 5 j 3 = 0 .
• Calcolare V31 = E 3 - E 1.
Dalle definizioni precedenti discende immediatamente che
239 - Circuiti elettrici in evoluzione dinamica
V31 = E 3 - E 1 = - 5 + 5 j 3 - 10 = 5 - 3 + j 3 .
In forma polare questa tensione diventa:
V31 = 5 9 + 3 = 5 12 = 10 3
e ϕ31 = π + arctan - 3 = π - π = 5 π .
6 6
3
• Verificare che V23 = - 10 j 3 .
Operando come nel caso precedente, otteniamo:
V23 = E 2 - E 3 = 5 - 1 - j 3 - 5 - 1 + j 3 = - 10 j 3 .
• Valutare il fasore A = E 1 + 2 E 2.
Sempre usando le definizioni delle tre tensioni assegnate, possiamo scrivere:
A = E 1 + 2 E 2 = 10 - 10 - 10 j 3 = - 10 j 3 = 10 3 , - π .
2
9.2.2 Disposizione degli utilizzatori
Veniamo, ora, alla disposizione degli utilizzatori che riflette, in gran parte, quanto
detto a proposito dei generatori e quanto già avete appreso nel primo volume a
proposito della trasformazione stella-triangolo.
I1
1
+
V12
−
2
+
3
Z
V23
−
I2
I3
Z
0
Z
Figura 9.10: tre impedenze uguali collegate a stella.
240 - Circuiti elettrici in evoluzione dinamica
La Figura 9.10 mostra tre impedenze uguali, di valore Z, percorse dalle tre
correnti di linea I1, I2 e I3. I tre generatori di alimentazione non sono mostrati in
figura per non appesantirla inutilmente.
Se le tre correnti di linea costituiscono un insieme di fasori che hanno lo stesso
modulo (I) e sono sfasati l’uno rispetto all’altro di 120°, si dice che costituiscono
un sistema trifase equilibrato nel carico. A seconda del senso ciclico scelto, una
terna viene detta diretta oppure inversa, come suggerisce la Figura 9.11. In questo
testo, salvo avviso contrario, come abbiamo già sottolineato per le terne di
tensioni, si farà riferimento soltanto a terne dirette.
I3
I2
120°
120°
120°
I1
120°
120°
I1
120°
I3
I2
Terna diretta
Terna inversa
I1 = I , α
I1 = I , α
I2 = I , α - 120°
I2 = I , α + 120°
I3 = I , α - 240°
I3 = I , α + 240°
Figura 9.11: terna diretta e inversa di correnti.
Allo stesso modo, se si considera un generico carico equilibrato a triangolo, tra le
correnti di linea e quelle di lato, sussistono i legami:
I1 = J12
3 , - π , I2 = J23
6
3 , - π , I3 = J31
6
3,-π .
6
(9.10)
241 - Circuiti elettrici in evoluzione dinamica
I1
1
+
J12
V12
2
3
−
+
V23
−
Z
I2
Z
J23
Z
J31
I3
Figura 9.12: tre impedenze uguali collegate a triangolo.
Le correnti J12, J23 e J31, essendo relative ai tre lati che compongono il triangolo di
impedenze, vengono dette correnti di lato.
La verifica delle relazioni (9.10) potrebbe essere fatta come per i legami tra
tensioni stellate e concatenate, visti in precedenza. Qui, invece di procedere per via
grafica, sfruttando relazioni geometriche sui triangoli isosceli, opereremo in
maniera analitica. Così facendo, avrete visto, una volta per tensioni, l’altra per le
correnti, le due maniere di procedere per passare dalla terna stellata a quella
concatenata.
Allora, mostriamo come si passa in maniera analitica dalla terna di correnti di lato
a quelle di linea. Riferendoci, ad esempio alla prima corrente di linea e
supponendo note le correnti di lato, risulta:
I1 = J12 - J31 .
Assumendo quale riferimento per le tensioni la prima concatenata
V12 = V , 0 = V ,
le tre correnti di lato, essendo proporzionali alle tensioni concatenate secondo le
impedenze, valgono:
V , - 2π/3
V , - 4π/3
J12 = V12 = V , J23 = V23 =
, J31 = V31 =
.
Z
Z
Z
Z
Z
Z
242 - Circuiti elettrici in evoluzione dinamica
Pertanto, possiamo scrivere:
I1 = J12 - J31 = V12 - V31 = 1 V12 - V31 = 1 V - V cos 4 π + j V sen 4 π =
3
3
Z
Z
Z
Z
= V 1 + 1 - j 3 = V 3 - j 3 = J12
2
2
2
Z
Z 2
3 , - arctan 3 = J12
3
3,-π .
6
Allo stesso modo verificate le relazioni (9.10) relative alle altre due correnti di
linea.
La Figura (9.13) riassume graficamente le relazioni espresse dalla (9.10); dovreste
confrontarla con cura con la Figura 9.7 per convincervi che le correnti di lato
giocano il ruolo delle tensioni stellate, mentre quelle di linea corrispondono a
quelle concatenate.
J12
I1
I2
J31
I3
J23
Figura 9.13: relazione tra le correnti di linea e di lato.
Esempio 2 - Tre resistori, con R = 190 Ω, sono collegati a triangolo e alimentati
da una terna di tensioni concatenate con V12 = 380 V. Determinare le correnti di
linea.
Dalla Figura 9.12, assumendo che le tre generiche impedenze coincidano con i tre
resistori assegnati, segue che
J12 = V12 = 380 A = 2 A → J23 = 2 , - 2 π , J31 = 2 , - 4 π .
R
190
3
3
Note le tre correnti di lato, possiamo agevolmente calcolare quelle di linea:
243 - Circuiti elettrici in evoluzione dinamica
I1 = J12 - J31 = 2 - 2 cos 2 π - j sen 2 π = 3 - j 3 = 2 3 , - π ;
3
3
6
I2 = 2 3 , - π - 2 π = 2 3 , - 5 π ;
6 3
6
I3 = 2 3 , - π - 4 π = 2 3 , - 3 π = 2 3 , π .
6 3
2
2
9.3 Collegamenti fra generatori e utilizzatori
Nel paragrafo appena terminato abbiamo appreso che, sia i generatori, sia i
carichi, possono essere collegati a stella oppure a triangolo e che il quarto
conduttore, il filo di neutro, può esserci o meno.
La Figura 9.14 riassume queste cose e riporta in maniera schematica i tre tipi di
collegamento possibili di generatori e carichi.
Collegamento a stella senza neutro
Collegamento a stella con neutro
Collegamento a triangolo
Figura 9.14: possibili collegamenti di generatori e carichi.
Nella Figura 9.15, invece, riportiamo le cinque possibili combinazioni tra
generatori e carichi, disposizioni circuitali che, di qui a poco, esamineremo in
dettaglio, ma che, per il momento, riassumiamo:
1) collegamento stella-stella;
2) collegamento stella-stella con neutro;
3) collegamento stella-triangolo;
4) collegamento triangolo-stella;
5) collegamento triangolo-triangolo.
244 - Circuiti elettrici in evoluzione dinamica
Per convenzione, abbiamo riportato a sinistra i generatori e a destra i carichi.
Ognuno di questi collegamenti ha qualche aspetto di particolare interesse e
rappresenta un tipo di impianto che si può incontrare nelle applicazioni.
Collegamento stella-stella
Collegamento stella-stella con neutro
Collegamento stella-triangolo
Collegamento triangolo-stella
Collegamento triangolo-triangolo
Figura 9.15: possibili collegamenti tra generatori e carichi.
È chiaro, allora, che il collegamento di una stella di generatori con neutro non si
può fare con un triangolo di impedenza: ci avanzerebbe un filo, quello di neutro,
che non sapremmo proprio ... dove collegare!
9.4 Esame dei diversi tipi di configurazione
È giunto il momento di prendere in esame, in qualche dettaglio, i diversi tipi di
configurazione e di collegamento descritti sommariamente nel precedente
paragrafo.
9.4.1 Collegamento stella-stella
Supponiamo ora di collegare i tre generatori a stella alle tre impedenze di carico
sempre a stella, come mostrato in Figura 9.16
245 - Circuiti elettrici in evoluzione dinamica
−
E1
+
Z1
1
I1
E2
0'
−
+
Z2
2
0
I2
E3
−
+
Z3
3
I3
Figura 9.16: collegamento stella-stella senza filo di neutro.
Le tre tensioni di alimentazione siano simmetriche come quelle delle relazioni
(9.2), mentre le tre impedenze possono anche essere diverse: ciò comporta che le
tre correnti non formano necessariamente una terna di correnti aventi lo stesso
modulo e neppure sfasate di 120°. Il nostro scopo è di calcolare le correnti di
linea, note che siano le tensioni di alimentazione e le impedenze.
La differenza di potenziale tra i nodi 0 e 0' è la chiave di volta del problema: se la
conoscessimo, potremmo calcolare agevolmente le tre correnti di linea. In realtà,
già sappiamo come si possa calcolare: basta ricordare quanto detto nel primo
volume sulla formula di Millman, che altro non era se non una applicazione del
metodo dei potenziali di nodo. Se non la ricordate, andate a riguardarla; senza
questa formula, non riuscireste a comprendere sino in fondo gran parte delle cose
che diremo.
Dunque, per calcolare la differenza di potenziale V00' = V0 - V0', facciamo uso
della formula di Millman:
E1 + E2 + E3
V00' = Z 1 Z 2 Z 3 = Y1 E 1 + Y2 E 2 + Y3 E 3 ,
1 + 1 + 1
Y1 + Y2 + Y3
Z1 Z2 Z3
(9.11)
in cui, per rendere la notazione più comoda, abbiamo introdotto le tre ammettenze
Y1 = 1 , Y2 = 1 , Y3 = 1 .
Z1
Z2
Z3
246 - Circuiti elettrici in evoluzione dinamica
La conoscenza di questa differenza di potenziale, detta spostamento del centro
stella per motivi che tra un po’ vi saranno più chiari, rende il calcolo delle
correnti di linea molto agevole. Se, infatti, vi aiutate con la Figura 9.17 e applicate
la LKT, potete scrivere
V00' - E 1 + Z 1 I1 = 0 ,
da cui è facile ricavare la prima corrente di linea
I1 = E 1 - V00' = Y1 E 1 - V00' .
Z1
−
E1
+
(9.12)
Z1
1
I1
0'
−
V00'
+
0
Figura 9.17: calcolo della corrente I1.
Con un po’ di pazienza possiamo ora esplicitare ulteriormente la relazione (9.12).
Sostituendo in essa l’espressione (9.11) che ci fornisce il valore della V00', avremo:
Y Y E - E 2 + Y3 E 1 - E 3
I1 = Y1 E 1 - Y1 E 1 + Y2 E 2 + Y3 E 3 = 1 2 1
.
Y1 + Y2 + Y3
Y1 + Y2 + Y3
Questa formula, stabilita con riferimento alla prima corrente, può essere
naturalmente estesa alle altre correnti di linea. Nel quadro che segue riportiamo il
valore delle tre correnti che è sempre buona norma controllare con cura:
247 - Circuiti elettrici in evoluzione dinamica
I1 = Y1 E 1 - V00' =
Y1
Y2 E 1 - E 2 + Y3 E 1 - E 3 ,
Y1 + Y2 + Y3
I2 = Y2 E 2 - V00' =
Y2
Y1 E 2 - E 1 + Y3 E 2 - E 3 ,
Y1 + Y2 + Y3
I3 = Y3 E 3 - V00' =
Y3
Y1 E 3 - E 1 + Y2 E 3 - E 2 .
Y1 + Y2 + Y3
(9.13)
Le formule (9.13) rappresentano tutto quanto ci serve per risolvere il nostro
problema; sembrano difficili da ricordare ma, come l’uso frequente suggerirà, è
molto facile trovare regole mnemoniche per ... tirarle fuori al momento
opportuno. Per convincervene, applichiamole in un caso particolare.
Esempio 3 - La rete trifase di figura è alimentata da una terna diretta di tensioni,
aventi lo stesso valore efficace. Determinare le correnti di linea.
−
e1(t)
+
R
1
i1(t)
−
e2(t)
+
0'
i2(t)
e3(t)
−
L
2
+
C
0
e1(t) = E 2 sen(ωt)
e2(t) = E 2 sen(ωt - 2π/3)
e3(t) = E 2 sen(ωt - 4π/3)
3
i3(t)
Si assuma che E = 20 V, ω = 1 krad/s, L = 1 mH, C = 1 mF, R = 1 Ω.
Cominciamo a calcolare le reattanze
XL = ω L = 1 Ω e XC = 1 = 1 Ω ,
ωC
e, quindi, le tre ammettenze
248 - Circuiti elettrici in evoluzione dinamica
Y1 = 1 = 1 S , Y2 = 1 = - j S , Y3 = 1 = j S .
R
j XL
- j XC
Assumendo le relazioni (9.2) quale riferimento per le tensioni stellate,
determiniamo la differenza di potenziale V00':
V00' = Y1 E 1 + Y2 E 2 + Y3 E 3 = E 1 - j E 2 + j E 3 =
Y1 + Y2 + Y3
= E + j E - E 3 - j E - E 3 = E 1 - 3 = - 20
2
2
2
2
3-1 V.
Da essa ricaviamo, allora, le tre correnti:
I1 = Y1 E 1 - V00' = 20 3 A ,
I2 = Y2 E 2 - V00' = 10 - 3 + j 1 - 2 3 A ,
I3 = Y3 E 3 - V00' = 10 - 3 - j 1 - 2 3 A .
La tabella precedente è stata stabilita in condizioni generali di alimentazione e di
carico. Tuttavia, la prima domanda che ci viene in mente è la seguente: assumendo
una terna di alimentazione simmetrica, come si semplificano nel caso particolare
di tre impedenze di carico uguali?
Ebbene, se assumiamo che
Z1 = Z2 = Z3 = Z
ovvero Y1 = Y2 = Y3 = Y ,
la formula (9.11) diventa:
V00' = Y E 1 + E 2 + E 3 = E 1 + E 2 + E 3 .
3
3Y
Essendo la terna di alimentazione simmetrica, per cui
E1 + E2 + E3 = 0 ,
concludiamo che i due nodi 0 e 0' sono allo stesso potenziale e
V00' = 0 .
249 - Circuiti elettrici in evoluzione dinamica
Questo risultato ci consente di semplificare le espressioni delle correnti di linea:
I1 = Y E 1 = E 1 ,
Z
I2 = Y E 2 = E 2 ,
Z
I3 = Y E 3 = E 3 .
Z
(9.14)
Proviamo a leggere il risultato espresso dalle tre relazioni (9.14). La prima
corrente di linea I1 è determinata dalla sola tensione E 1 (e ovviamente
dall’impedenza); se volete, la prima tensione imposta dal generatore ‘cade’ tutta
sulla impedenza della prima linea. Allo stesso modo, le altre due tensioni
riguardano solo le impedenze delle linee omologhe. È, per certi versi, come se
avessimo a che fare con tre circuiti ‘monofase’ indipendenti. Questa osservazione
ci tornerà utile nel prossimo paragrafo quando spiegheremo l’uso del filo di
neutro.
Inoltre, delle tre relazioni (9.14) si può dare una efficace rappresentazione
grafica, riportata in Figura (9.18).
Ι3
E3
0
Ι2
Z= Z,ϕ
ϕ
ϕ
E1
ϕ
E2
Ι1
Figura 9.18: tensioni di alimentazione e correnti di linea in una linea equilibrata.
Osservate con attenzione questa figura: in essa trovate le tre tensioni di
alimentazione, che formano una terna simmetrica, e le tre correnti di linea, che
costituiscono una terna equilibrata. Ciascuna corrente, rispetto alla corrispondente
tensione, è, nel caso scelto come esempio, in ritardo dello stesso angolo ϕ che
rappresenta proprio la fase dell’impedenza.
Qualora le tre impedenze non fossero uguali, sempre ammesso che le tensioni di
alimentazione siano una terna simmetrica, il diagramma fasoriale si modifica
come mostrato in Figura 9.19.
250 - Circuiti elettrici in evoluzione dinamica
E3
0
ϕ2
Ι2
Ι3
ϕ3
E1
ϕ1
E2
Ι1
Figura 9.19: tensioni di alimentazione e correnti di linea in una linea squilibrata.
Le tre correnti non hanno più lo stesso valore efficace, e nemmeno l’angolo
relativo tra tensione e corrente della stessa linea è lo stesso per le tre fasi. Inoltre,
la differenza di potenziale V00' non è più nulla e le tre tensioni sui carichi V10, V20
e V30 non costituiscono più una terna simmetrica di tensioni, come indica la Figura
9.20.
E3 3
V30
V00'
0'
0
V10
1 E1
V20
E2
2
Figura 9.20: interpretazione dello spostamento del centro stella.
Da questa figura si capisce l’origine del nome di V00': spostamento del centro
stella. Se il carico è costituito da tre impedenze diverse, il centro 0 della stella
delle tre tensioni di alimentazione è diverso da quello 0' delle tre tensioni sui
carichi, e la tensione V00' rappresenta proprio lo spostamento tra questi due centri
stella. Ricordiamo ancora una volta che, se le tre impedenze di carico sono uguali,
le due terne coincidono.
Da quanto precede, si può concludere che il collegamento in esame non è
consigliabile con carichi non equilibrati poiché, quanto più squilibrato è il sistema,
251 - Circuiti elettrici in evoluzione dinamica
tanto più grande è la V00' rispetto alle tensioni di fase, e dunque le tensioni sulle
impedenze
V10 = E 1 - V00' , V20 = E 2 - V00' , V30 = E 3 - V00' ,
sono sempre più dissimetriche. Come discuteremo più in dettaglio nel prossimo
paragrafo, questo squilibrio non è gradito nel progetto di un buon impianto di
distribuzione che, se ben fatto, dovrebbe alimentare le tre impedenze di carico con
una terna simmetrica.
Esempio 4 - La terna simmetrica diretta di tensioni stellate, di valore efficace
E = 220 V, alimenta tre resistenze uguali, di valore R = 10 Ω.
−
E1
+
R
1
I1
E2
0'
−
+
R
2
0
I2
E3
−
+
R
3
I3
• Determinare le tre correnti di linea.
Il carico è costituito da tre resistenze uguali e, pertanto, lo spostamento del centro
stella è nullo. In questa situazione, la prima tensione E 1 insiste tutta sulla resistenza
della prima linea, la seconda tensione E 2 su quella della seconda linea, la terza
tensione E 3 su quella della terza linea. Allora:
I1 = E 1 = 22 , 0 , I2 = E 2 = 22 , - 2 π , I3 = E 3 = 22 , - 4 π .
R
R
3
R
3
(Verificate, per esercizio, che la somma di queste tre correnti è identicamente
nulla).
252 - Circuiti elettrici in evoluzione dinamica
• A causa di un guasto, la seconda linea si interrompe. Determinare lo spostamento
del centro stella.
−
E1
+
R
1
I1
E2
0'
−
+
0
I2 = 0
E3
−
R
2
+
R
3
I3
In questa nuova situazione, la conduttanza della seconda linea è nulla (se vi piace
di più, potete anche dire che la resistenza, a causa del guasto, diventa infinita).
Allora, la corrente I2 è zero e, pertanto, posto G = 1/R, risulta:
V00' = G E 1 + 0 E 2 + G E 3 = E 1 + E 3 = - E 2 .
G+0+G
2
2
Sostituendo i valori numerici assegnati e usando le (9.2), otteniamo:
V00' = - E cos 2 π + j E sen 2 π = 110 + j 55 3 V .
2
3
2
3
9.4.2 Collegamento stella-stella con neutro
La presenza del filo di neutro impone che, per questo tipo di collegamento, sia
sempre verificata la condizione:
V00' = 0 .
253 - Circuiti elettrici in evoluzione dinamica
−
E1
+
Z1
1
I1
E2
0'
−
+
Z2
2
0
I2
E3
−
+
Z3
3
I3
I0
Figura 9.21: collegamento stella-stella con neutro.
Ciò porta come naturale conseguenza che le tensioni ai capi delle singole
impedenze siano uguali alle tensioni di fase imposte dai generatori, che, come più
volte sottolineato, sono generalmente simmetriche. Inoltre, le correnti di linea,
ove si tenga conto della precedente relazione, si calcolano immediatamente:
I1 = E 1 , I2 = E 2 , I3 = E 3 .
Z1
Z2
Z3
Infine, la corrente del neutro, in forza della LKC al nodo 0' (oppure 0), vale:
I0 = - I1 - I2 - I3 = - E 1 - E 2 - E 3 = - Y1 E 1 - Y2 E 2 - Y3 E 3 .
Z1 Z2 Z3
(9.15)
Esempio 5 - La rete trifase di figura è alimentata da una terna simmetrica diretta
di tensioni di valore efficace E = 220 V. Assumendo R = 100 Ω, L = 0.11 H ,
C = 1 mF e ω = 100 rad/s, determinare la corrente di neutro i0(t).
254 - Circuiti elettrici in evoluzione dinamica
−
e1(t)
+
R
1
i1(t)
0'
−
e2(t)
+
i2(t)
e3(t)
−
L
2
+
0
C
3
i3(t)
i0(t)
Se rappresentiamo le tre tensioni del generatore per mezzo della terna
E 1 = 220 , 0 = 220 ,
E 2 = 220 , - 2 π = 220 cos 2 π - j 220 sen 2 π = - 110 - j 110 3 ,
3
3
3
4
4
E 3 = 220 , - π = 220 cos π + j 220 sen 4 π = - 110 + j 110 3 ,
3
3
3
possiamo ottenere facilmente ottenere le correnti delle tre linee
I1 = E 1 = 2.2 A ,
R
I2 = E 2 = - 110 - j 110 3 = 10 - 3 + j A ,
jωL
11 j
I3 = j ω C E 3 = - 110 + j 110 3 = - 11 3 + j A ,
- 10 j
e da esse la corrente del neutro
I0 = - I1 - I2 - I3 = - 2.2 + 10 3 - 10 j + 11 3 + 11 j = 21 3 - 2.2 + j =
1
≅ 34.19 , arctan
≅ 34.19 , 0.02925 .
21 3 - 2.2
Ritornando alle funzioni sinusoidale, infine, risulta:
255 - Circuiti elettrici in evoluzione dinamica
i0(t) ≅ 34.19 2 sen(100 t + 0.02925) .
Il collegamento in esame è adatto nel caso di carichi aventi una certa probabilità di
squilibrio. In tal modo, siamo sicuri che le tensioni sui carichi hanno tutte lo stesso
valore efficace, anche se le impedenze sono diverse tra loro. Un esempio tipico si
ha negli impianti elettrici degli edifici civili: in ogni appartamento entrano due
fili, il neutro e un altro filo. Questo secondo filo risulta quello della fase 1 per un
terzo degli appartamenti dell’edificio, quello della fase 2 per un altro terzo, quello
della fase 3 per l’ultimo terzo. Se anche il gruppo di appartamenti serviti da una
fase presenta un carico squilibrato rispetto a un altro gruppo (evento assai
probabile), la tensione fra i due fili in arrivo in ogni alloggio (ricordate che uno
della coppia è sempre il neutro) non varia il suo valore efficace. Quanto più
pronunciato è lo squilibrio, tanto più grande sarà la corrente di neutro I0, secondo
quanto si deduce dalla formula (9.15).
9.4.3 Collegamento stella-triangolo
In questo caso supponiamo che siano assegnate le tre tensioni di fase dei generatori
e le tre impedenze che costituiscono il carico a triangolo.
E1
−
I1
+
+
0'
−
−
E2
E3
1
J12
V12
+ −
+
V23
+ −
Z1
I2
Z3
2
J23
Z2
I3
J31
3
Figura 9.22: collegamento stella-triangolo.
Per determinare le correnti di linea, è opportuno innanzitutto valutare le tre
tensioni concatenate, dalle quali si deducono agevolmente le correnti di lato:
J12 = V12 , J23 = V23 , J31 = V31 .
Z1
Z2
Z3
256 - Circuiti elettrici in evoluzione dinamica
Le correnti di linea si ricavano applicando le LKC ai nodi 1, 2 e 3, secondo le
relazioni:
I1 = J12 - J31 , I2 = J23 - J12 , I3 = J31 - J23 .
Esempio 6 - La rete trifase di figura è alimentata da una terna simmetrica diretta
di tensioni stellate di valore efficace E = 110 V. Determinare le correnti di linea,
assumendo che XC = 11 3 Ω.
E1
−
I1
+
+
0'
−
−
E2
E3
1
J12
V12
+ −
+
V23
+ −
XC
I2
XC
2
J23
XC
I3
J31
3
Assumendo, come di consueto, quale riferimento per le fasi la prima tensione del
generatore, stante le relazioni (9.5), le tre tensioni concatenate sono pari a:
V12 = 110 3 , π = 110 3 + j 3 V ,
6
2
2
V23 = 110 3 , - π = - j 110 3 V ,
2
V31 = 110 3 , 5 π = 110 - 3 + j 3 V .
6
2
2
Note le tre tensioni concatenate, le correnti di fase discendono immediatamente:
257 - Circuiti elettrici in evoluzione dinamica
,π
6 =-5 1-j 3 A,
-π
2
3,-π
2 = 10 A ,
3,-π
2
3,5π
6 =-5 1+j 3 A.
3,-π
2
110 3
V
12
J12 =
=
- j XC 11 3 ,
110
J23 = V23 =
- j XC
11
110
J31 = V31 =
- j XC
11
Infine, applicando la LKC al nodo 1, otteniamo la prima corrente di linea
I1 = J12 - J31 = - 5 + 5 j 3 + 5 + 5 j 3 = 10 j 3 A ,
e similmente le altre due. Volendo ricavare le sole correnti di linea, si sarebbe
anche potuto operare la trasformazione del triangolo di impedenze in stella e poi
procedere come mostrato in precedenza.
9.4.4 Collegamento triangolo-stella
In questo caso, si può trasformare la stella delle impedenze degli utilizzatori nel
triangolo equivalente. Dato che i generatori sono a triangolo, si conoscono già la
tensioni concatenate e si può procedere come mostrato nel paragrafo precedente.
1
+
V12
I1
−
−
V31
Z1
Z2
0
2
+
+
I2
−
I3
V23
Z3
3
Figura 9.23: collegamento triangolo-stella.
258 - Circuiti elettrici in evoluzione dinamica
Si potrebbe anche trasformare il triangolo di generatori in stella, secondo le
formule (9.8), e operare come nel caso del collegamento stella-stella.
Esempio 7 - Determinare la prima corrente di linea. Si assuma V12 = 25 3 V e
R = 5 Ω.
I1
1
+
V12
−
2
+
3
R
V23
−
I2
I3
R
0
R
In questo esempio non vengono assegnate le tre tensioni stellate del generatore ma
direttamente le concatenate. Se rivedete le formule (9.8) nel caso particolare
α = 0, risolverete senza difficoltà l’esempio, trovando:
I1 = 5 , - π .
6
Quanto valgono le altre correnti di linea? E poi, la LKC al nodo 0 è verificata?
9.4.5 Collegamento triangolo-triangolo
Come operare in questo tipo di collegamento discende dalle cose dette in
precedenza. Vi facciamo soltanto osservare che i generatori ci forniscono i valori
delle tensioni concatenate, per mezzo dei quali calcoliamo rapidamente le correnti
dei lati del triangolo di impedenze, note le quali è poi facile risalire a quelle di
linea.
259 - Circuiti elettrici in evoluzione dinamica
1
+
V12
I1
J12
Z2
−
−
V31
2
+
Z3
I2
+
J23
V23
J31
Z1
−
I3
3
Figura 9.24: collegamento triangolo-triangolo.
Come sempre un esempio vale più di mille parole.
Esempio 8 - Assumendo V12 = 380 V e R = XL = 19 Ω, determinare la prima
corrente di linea.
I1
1
+
J12
V12
−
2
+
3
V23
−
R
I2
J23
R
I3
XL
J31
La prima cosa da osservare nell’esempio proposto è che la tensione concatenata tra
la prima e la seconda linea viene assegnata non solo in valore efficace, ma anche in
fase (in particolare, la si assume a fase nulla). Pertanto, dato che
I1 = J12 - J31 ,
260 - Circuiti elettrici in evoluzione dinamica
per determinare la prima corrente di linea, dobbiamo calcolare le due correnti di
fase. Risulta, allora:
J12 = V12 = 20 A ,
R
J31 = V31 =
j XL
380 , - 4 π
3 = 20 , - 11 π = 20 , π = 10
π
6
6
19 ,
2
3+j A.
In definitiva, la corrente della prima linea vale:
I1 = 10 1 - 3 - j A .
Completate l’esempio determinando le correnti nella altre due linee e verificando
che la somma delle tre correnti di linea è identicamente nulla.
9.5 Un primo vantaggio dei sistemi trifasi
Giunti a questo punto della trattazione, dopo aver introdotto le terne di tensioni e
correnti ed aver studiato tutti i possibili collegamenti tra generatori e carichi, il
lettore più attento si sarà certamente domandato quali siano i veri vantaggi dei
sistemi trifasi. Per comprenderli a fondo, dobbiamo discutere delle potenze messe
in gioco; in questo paragrafo cominceremo a discutere la questione, mostrando un
primo vantaggio che si può ottenere.
Consideriamo la rete trifase mostrata in Figura 9.25. Si tratta, come ormai
dovrebbe esservi ben chiaro, della solita terna simmetrica di tensioni stellate che
alimenta un generico carico trifase equilibrato, indicato con M in figura.
261 - Circuiti elettrici in evoluzione dinamica
−
e1(t)
+
1
i1(t)
0'
−
e2(t)
+
2
M
i2(t)
e3(t)
−
+
3
i3(t)
[neutro]
i0(t)
Figura 9.25: carico equilibrato alimentato da una terna simmetrica di tensioni.
Potete pensare il carico M come volete; se vi fa piacere, immaginate vi siano tre
impedenze collegate a stella oppure a triangolo. Una cosa è certa: il carico M
verrà supposto equilibrato. La presenza del neutro, tratteggiato in figura e
supposto conduttore elettrico perfetto, non è essenziale per la discussione che
segue.
Quale che sia il tipo di carico che avete immaginato, la potenza istantanea fornita
dai generatori, che rappresenta proprio tutta quella assorbita dal carico, vale:
p(t) = e1(t) i1(t) + e2(t) i2(t) + e3(t) i3(t) .
Ricordiamo che la terna di tensioni è simmetrica e, pertanto,
e1(t) = E 2 sen(ωt) ,
e2(t) = E 2 sen(ωt - 2π/3) ,
e3(t) = E 2 sen(ωt - 4π/3) ,
mentre la terna di correnti è pari a
i1(t) = I 2 sen(ωt - ϕ) ,
i2(t) = I 2 sen(ωt - 2π/3 - ϕ) ,
i3(t) = I 2 sen(ωt - 4π/3 - ϕ) ,
(9.16)
262 - Circuiti elettrici in evoluzione dinamica
in cui il valore efficace I e la fase ϕ dipendono da come è realizzato il carico (si
dice anche, più sinteticamente, che dipendono dal tipo di carico). Stando così le
cose, la potenza istantanea risulterà:
p(t) = 2 E I sen(ωt) sen(ωt - ϕ) + 2 E I sen ωt - 2π sen ωt - 2π - ϕ +
3
3
(9.17)
+ 2 E I sen ωt - 4π sen ωt - 4π - ϕ .
3
3
Ci conviene, a questo punto, applicare, per tre volte di seguito, la relazione
trigonometrica secondo la quale il prodotto di due funzioni seno si può
trasformare nella somma di due funzioni coseno:
2 sen a sen b = cos(a - b) + cos(a + b) .
Applicandola al nostro caso, la (9.17) diventa:
p(t) = 3 E I cos ϕ - E I cos(2ωt - ϕ) - E I cos 2ωt - ϕ - 4π +
3
- E I cos 2ωt - ϕ - 8π .
3
(9.18)
La formula (9.18) è composta da due termini:
- il termine costante
P = 3 E I cos ϕ ,
che non dipende dal tempo;
- il termine variabile
p0(t) = - E I cos(2ωt - ϕ) + cos(2ωt - ϕ - 4π/3) + cos(2ωt - ϕ - 8π/3) .
che sembra dipendere dal tempo.
Abbiamo usato l’espressione ‘sembra dipendere dal tempo’ perché, come tra un
momento vedremo nel dettaglio, il secondo termine è nullo. Se pensate, infatti, di
riscrivere questo termine dopo avere posto α = 2ωt - ϕ ed aver osservato che
263 - Circuiti elettrici in evoluzione dinamica
-8 π=-2π-2 π,
3
3
otterrete la quantità:
- p0(t) = cos α + cos(α - 4π/3) + cos(α - 2π/3) .
EI
Ora, è facile convincersi che è nulla dal momento che questa ultima quantità può
interpretarsi come la somma di tre fasori, di stesso valore efficace, sfasati di 120°;
una tale somma, come certamente ricorderete, è nulla.
Tornando alla potenza istantanea assorbita dal carico (9.18), possiamo concludere
che
p(t) = 3 E I cos ϕ ,
cioè che essa non varia nel tempo. E questo è proprio il primo grande vantaggio
dei sistemi trifase rispetto a quelli monofase perché, se andate a rivedere quanto
detto a proposito della potenza in regime sinusoidale monofase, scoprirete che essa
era composta di due termini: uno costante, che rappresentava la potenza media,
l’altro oscillante con pulsazione doppia e a valor medio nullo in un periodo.
Un carico trifase equilibrato, dunque, assorbe una potenza istantanea costante nel
tempo, potenza che coincide anche con il suo valor medio. Concludiamo che, in
questo caso, essendo assenti termini oscillanti, possiamo scrivere:
p(t) = 3 E I cos ϕ = P .
(9.19)
Il termine oscillante, presente nel caso monofase, rappresentava un inutile
impegno della sorgente a fornire un’energia al carico, energia che in certi istanti
era fornita dalla sorgente al carico, in altri ritornava dal carico alla sorgente, ma
che, in ogni caso, rappresentava un inutile impegno. Questa energia ‘fluttuante’ nel
caso trifase è scomparsa e la sorgente trifase non viene inutilmente impegnata a
fornirla.
Prima di concludere questo paragrafo un’ultima osservazione va fatta.
La formula (9.19) ci fornisce la potenza media assorbita da un carico trifase
equilibrato. In essa la fase ϕ rappresenta l’angolo che la generica tensione di fase
264 - Circuiti elettrici in evoluzione dinamica
forma con la corrispondente corrente di linea. Le tensioni concatenate non entrano
in questo computo di angoli.
Questa formula, d’abitudine, si trova anche scritta con riferimento al valore
efficace della tensione concatenata V = E 3, nella forma:
p(t) = 3 V I cos ϕ = P .
È solo una questione di comodità di uso. Tuttavia la fase ϕ è la stessa appena detta:
angolo tra tensione di fase e corrente di linea corrispondente. Tenetelo bene in
mente.
Esempio 9 - Determinare la potenza istantanea assorbita dalla rete trifase
mostrata in figura. Si supponga di alimentare la rete con una terna simmetrica
diretta di tensioni stellate di valore efficace E = 220 V e che R = 50 Ω.
−
e1(t)
+
R
1
i1(t)
e2(t)
0'
−
+
R
2
0
i2(t)
e3(t)
−
+
R
3
i3(t)
La rete assegnata è simmetrica ed equilibrata e, pertanto, la prima tensione del
generatore è tutta sulla resistenza della prima linea e così via per le altre due. Ciò
vuol dire che
i1(t) = e1(t) , i2(t) = e2(t) , i3(t) = e3(t) .
R
R
R
Le potenze istantanee assorbite dalle tre resistenze valgono
265 - Circuiti elettrici in evoluzione dinamica
2
2
2
p1(t) = R i21(t) = e1(t) = 2 E sen2(ωt) = E 1 - cos(2ωt) ,
R
R
R
2
2
2
p2(t) = R i22(t) = e2(t) = 2 E sen2(ωt - 2π/3) = E 1 - cos(2ωt - 4π/3) ,
R
R
R
2
2
2
p3(t) = R i23(t) = e3(t) = 2 E sen2(ωt - 4π/3) = E 1 - cos(2ωt - 8π/3) ,
R
R
R
in cui abbiamo usato la relazione trigonometrica
sen2(ωt) = 1 - cos(2ωt) .
2
La potenza istantanea, somma delle tre precedenti potenze, risulta
2
2
2
p1(t) = 3 E - E cos(2ωt) + cos 2ωt - 4π + cos 2ωt - 8π = 3 E = 2904 W .
R R
3
3
R
che, come sappiamo dalla teoria appena svolta, coincide con il solo termine
costante. Tuttavia, volendo verificare che il termine fluttuante è nullo per ogni
istante di tempo, possiamo procedere in maniera diversa da come proposto in
questo paragrafo, usando le formule di addizione della funzione coseno. In altri
termini, è facile verificare quanto segue:
cos(2ωt) + cos(2ωt - 4π/3) + cos(2ωt - 8π/3) =
cos(2ωt) 1 + cos(4π/3) + cos(8π/3) + sen(2ωt) sen(4π/3) + sen(8π/3) =
= cos(2ωt) 1 - 1 - 1 + sen(2ωt) 3 - 3 = 0 .
2 2
2
2
In tal modo, abbiamo verificato, almeno in un caso particolare, che il termine di
potenza fluttuante è nullo in maniera, leggermente diversa, da quanto proposto
nella spiegazione generale fornita.
9.6 Potenze nei sistemi trifasi
Siamo ora pronti a parlare in maniera più completa della potenza assorbita da un
sistema trifase. Per farlo, cominciamo coll’osservare la Figura 9.26 in cui
abbiamo disegnato, quale esempio, un carico costituito da tre impedenze diverse
collegate a stella.
266 - Circuiti elettrici in evoluzione dinamica
La potenza complessa assorbita dal questo carico coincide con quella assorbita
dalle tre impedenze, sicché si può scrivere come la somma dei tre termini:
*
*
*
P = P + j Q = V10 I1 + V20 I2 + V30 I3 .
(9.20)
È pure evidente che la parte reale della potenza complessa (9.20) coincide con la
potenza attiva, quella che abbiamo calcolato facendo il valor medio nel paragrafo
precedente, e che la parte immaginaria definisce la potenza reattiva
complessivamente assorbita dal carico trifase. Le considerazioni che stiamo per
fare, comunque, si adattano naturalmente anche al caso di un carico a triangolo
dato che la trasformazione triangolo-stella ci consente di trasformare un carico
nell’equivalente altro.
Z1
1
I1
Z2
0
2
I2
Z3
P = V10 I1* + V20 I2* + V30 I3*
3
I3
Figura 9.26: carico trifase descritto nel dominio dei fasori.
Come sempre cominciamo con un esempio.
Esempio 10 - Determinare la potenza complessa assorbita dal carico trifase
mostrato in figura, alimentato da una terna simmetrica diretta di tensioni.
267 - Circuiti elettrici in evoluzione dinamica
R
I1
1
+
V12
2
3
−
+
R
I2
0
R = 19 Ω
XL = XC = 20 Ω
V12 = 380 V
V23
− I3
XL
XC
Vale la pena notare, innanzitutto, due cose:
• la tensione concatenata tra le linee 1 e 2 ci è stata assegnata in modulo e fase;
• l’uguaglianza delle due reattanze comporta che la terza linea sia un circuito
aperto.
Da queste osservazioni scaturisce il circuito semplificato mostrato nella figura
seguente, in cui viene messo in evidenza che la corrente della terza linea è nulla.
R
I1
1
+
V12
−
2
+
3
V23
−
R
I2
0
I3 = 0
Ora, applicando la LKT alla maglia costituita dalle prime due linee e la LKC al
nodo 0, risulta:
268 - Circuiti elettrici in evoluzione dinamica
V12 = R I1 - R I2 e I1 = - I2 .
Da queste equazioni discende immediatamente che
I1 = - I2 = V12 = 10 A .
2R
Pertanto la potenza complessa è pari a
*
*
*
*
P = P + j Q = V10 I1 + V20 I2 + V30 I3 = V10 - V20 I1 =
*
2
*
*
= V1 - V0 - V2 + V0 I1 = V12 I1 = V12 V12 = V12 = 3800 W .
2R 2R
La risonanza nel parallelo L-C comporta che la potenza complessa sia un numero
reale e che, quindi, vi sia solo assorbimento di potenza attiva da parte del carico.
Come si può misurare la potenza assorbita da un generico sistema trifase?
Per approfondire il problema della misura della potenza trifase, è necessario
distinguere il caso in cui il centro della stella di impedenze che costituisce il carico
sia accessibile da quello in cui il centro stella non è accessibile. Nel primo caso,
infatti, possiamo fisicamente arrivare al punto comune alle tre impedenze; nel
secondo non possiamo arrivarci e, come vedremo tra un momento, dobbiamo in
qualche maniera ricostruirlo. Ma procediamo con ordine e distinguiamo i due casi.
9.6.1 Centro stella accessibile
Se il centro stella delle tre impedenze è accessibile, la misura della potenza attiva
assorbita dal carico trifase si può eseguire come mostrato in Figura 9.27. I tre
wattmetri misurano, ciascuno, la potenza attiva assorbita dalla impedenza di linea
in cui sono inseriti. Il primo wattmetro, ad esempio, misura la potenza attiva
assorbita dall’impedenza ohmico-induttiva Z 1 = R1 + j X1, che vale
P1 = R 1 I 21 = V 10 I 1 cos ϕ 10 ,
in cui l’angolo ϕ10 rappresenta la fase relativa tra la tensione V10 e la corrente I1.
Stesse considerazioni potete ripetere per le altre due impedenze.
269 - Circuiti elettrici in evoluzione dinamica
Notate pure come il punto comune delle voltmetriche dei tre wattmetri, indicato
con U in figura, coincida con il centro stella 0 delle impedenze.
1
+
Z1
+
W
W1
+
2
I1
+
W
Z2
W2
+
3
0
I2
+
W
W3
Z3
I3
U
Figura 9.27: misura della potenza attiva nel caso di centro stella accessibile.
1
+
Z1
+
I1
Var1
2
+
+
Z2
Var2
+
3
0
I2
+
Z3
Var3
I3
U
Figura 9.28: misura della potenza reattiva nel caso di centro stella accessibile.
270 - Circuiti elettrici in evoluzione dinamica
Se disponessimo di tre varmetri, cioè di tre strumenti che misurano la potenza
reattiva, potremmo usare lo stesso schema discusso con i wattmetri. In Figura 9.28
tre varmetri vengono utilizzati per effettuare una misura della potenza reattiva
assorbita dal carico trifase. Notate che un varmetro, se esistesse, sarebbe uno
strumento a quattro terminali, proprio come un wattmetro. Con i simboli appena
introdotti, Var1 misura, ad esempio, la potenza reattiva assorbita dalla prima
impedenza:
Q1 = X 1 I 21 = V10 I1 sen ϕ 10 .
Riassumendo, gli schemi mostrati nelle Figure 9.27 e 9.28 suggeriscono che
P = W1 + W2 + W3 = V10 I1 cos ϕ10 + V20 I2 cos ϕ20 + V30 I3 cos ϕ30 ,
Q = Var1 + Var2 + Var3 = V10 I1 sen ϕ10 + V20 I2 sen ϕ20 + V30 I3 sen ϕ30 .
9.6.2 Centro stella inaccessibile
Supponiamo, ora, che il centro stella sia inaccessibile, come accade nella maggior
parte dei casi.
1
2
+
Z1
+
W
W1
+
I1
+
W
Z2
0
W2
+
3
I2
+
W
W3
Z3
I3
U
Figura 9.29: misura della potenza attiva nel caso di centro stella inaccessibile.
Lo schema mostrato in Figura 9.29 delinea una possibile strategia di misura della
potenza attiva. Analoghe considerazioni si possono fare nel caso della potenza
271 - Circuiti elettrici in evoluzione dinamica
reattiva, e, per questo motivo, nelle deduzioni che seguono parleremo sempre
della potenza complessa.
La somma delle indicazioni dei tre wattmetri di Figura 9.29 e degli eventuali tre
varmetri sistemati allo stesso modo ci fornisce la seguente potenza complessa:
*
*
*
P = V1U I1 + V2U I2 + V3U I3 .
(9.21)
Ora, dato che le tre tensioni sono riferite al nodo comune U, esse possono
scriversi come differenze di potenziale rispetto a questo nodo:
V1U = V1 - VU , V2U = V2 - VU , V3U = V3 - VU .
Sostituendo nell’espressione della potenza complessa, risulta che
*
*
*
P = V1 - VU I1 + V2 - VU I2 + V3 - VU I3 =
*
*
*
*
*
*
= V1 I1 + V2 I2 + V3 I3 + I1 + I2 + I3 VU .
Dato che stiamo considerando un sistema trifase senza neutro, la somma delle tre
correnti di linea è nulla e l’espressione precedente si può semplificare:
*
*
*
P = V1 I1 + V2 I2 + V3 I3 .
Proprio il fatto che la somma delle tre correnti di linea è nulla ci consente anche
di scrivere pure che
*
*
*
*
*
*
P = V1 I1 + V2 I2 + V3 I3 - I1 + I2 + I3 V0 ,
in cui V0 rappresenta il potenziale del centro della stella di impedenze. Ma allora il
gioco è fatto poiché quest’ultima relazione può essere riscritta nella forma
*
*
*
P = V1 - V0 I1 + V2 - V0 I2 + V3 - V0 I3 .
(9.22)
dalla quale appare con chiarezza che la misura (9.21) ci fornisce proprio la
potenza complessa assorbita dal carico trifase. La formula (9.22) si commenta
dicendo che se il centro stella risulta inaccessibile ... si crea ‘artificialmente’ e la
misura della potenza assorbita risulta comunque possibile.
272 - Circuiti elettrici in evoluzione dinamica
Le considerazioni precedenti sono state sviluppate in tutta generalità; il punto U,
comune ai tre wattmetri, è un punto qualsiasi e nulla ci vieta di considerarlo
proprio su una delle tre linee. Ad esempio, in Figura 9.30, il punto U è stato scelto
sulla terza linea e questa scelta rende inutile l’uso del terzo wattmetro che
fornirebbe sempre indicazione nulla dato che la tensione ai suoi capi è nulla.
Quando i wattmetri sono usati in questa configurazione, si dice che abbiamo
realizzato un’inserzione Aron (dal nome dello studioso che per primo la propose).
Dunque, due strumenti indicatori (wattmetri o varmetri che siano) sono
effettivamente necessari per eseguire misure su sistemi trifasi qualsiasi. Nel
prossimo paragrafo mostreremo come, per mezzo di un’inserzione Aron, se il
sistema è equilibrato possiamo conoscere anche la potenza reattiva usando soltanto
due wattmetri.
1
2
+
+
W
W1
Z1
I1
+
Z2
+
W
0
W2
I2
Z3
3
I3
Figura 9.30: inserzione Aron.
9.6.3 Sistema trifase equilibrato
Se il carico è equilibrato, le precedenti considerazioni possono ulteriormente
semplificarsi. Innanzitutto, la formula generale (9.20), detta Z l’impedenza di
carico, diventa:
P = P + j Q = V10 I1* + V20 I2* + V30 I3* = Z I1 I1* + Z I2 I2* + Z I3 I3* =
= Z I21 + Z I22 + Z I23 = 3 Z I2 ,
in cui I è il valore efficace comune alle tre correnti. Se l’impedenza di carico è
posta nella forma (peraltro generale)
273 - Circuiti elettrici in evoluzione dinamica
Z = Z , ϕ = Z (cos ϕ + j sen ϕ) ,
la relazione precedente, considerando separatamente la parte reale e la parte
immaginaria, ci fornisce le due relazioni
P = 3 Z I2 cos ϕ = 3 E I cos ϕ ,
Q = 3 Z I2 sen ϕ = 3 E I sen ϕ ,
di uso assai frequente, in cui si è posto E = Z I.
Esempio 11 - Un motore è alimentato da una terna simmetrica di tensioni
stellate. Determinare le correnti di linea.
E1
−
0'
E2
−
E3
−
1
+
E 1 = 220 V
I1
+
2
M
I2
+
PM = 3 kW
QM = 1 kVar
3
I3
Prima di iniziare a risolvere il quesito proposto, vale la pena notare che la prima
tensione stellata ci viene assegnata in modulo, E = 220 V, e fase (nulla). Inoltre,
non sappiamo come è fisicamente costruito il motore, ma sappiamo che assorbe
una data potenza attiva ed una reattiva, che, essendo positiva, ci informa che si
tratta di un carico ohmico-induttivo. Detto ciò, dalle relazioni generali
PM = 3 E I cos ϕM e QM = 3 E I sen ϕM ,
si ricava immediatamente il valore della fase ϕM:
tan ϕ M = QM = 1
PM
3
→ ϕM = π .
6
Allora, il comune valore efficace delle correnti di linea risulta pari a
274 - Circuiti elettrici in evoluzione dinamica
I=
PM
= 1000 3 A = 100 A = 3.03 A ,
3 E cosϕ M 3 220 3
33
2
e, pertanto, ricordando che la prima corrente è in ritardo di π/6 rispetto alla
corrispondente tensione stellata e che le altre due correnti sono in ritardo rispetto
alla prima di 2π/3, potremo scrivere:
I1 = I , - π , I2 = I , - 5 π , I3 = I , π .
6
6
2
Come potete controllare da soli, la somma di queste tre correnti è nulla in forza
della LKC al nodo 0', e il diagramma fasoriale che le rappresenta è mostrato nella
figura che segue.
ℑ
α
I2
I3
α=π
6
0
E1
α
ℜ
I1
Le precedenti considerazioni sulla misura della potenza, nel caso di un carico
equilibrato, risultano molto semplificate. Osservate la Figura 9.31.
275 - Circuiti elettrici in evoluzione dinamica
1
2
+
+
W
W1
Z
I1
+
+
W
Z
0
W2
I2
Z
3
I3
Figura 9.31: inserzione Aron su un sistema equilibrato.
La somma delle indicazioni dei due wattmetri in inserzione Aron, come sappiamo,
ci forniscono la potenza attiva; ciò che non sappiamo è che la loro differenza
risulta proporzionale alla potenza reattiva assorbita dal carico trifase.
In maniera più formale, possiamo dire che la somma delle indicazioni dei due
wattmetri fornisce la potenza attiva complessivamente assorbita dal carico:
P = W1 + W 2 .
(9.23)
In realtà, se riflettete bene, anche un solo wattmetro sarebbe sufficiente per la
misura della potenza attiva. Provate a scoprire da soli il motivo.
Per la misura della potenza reattiva, consideriamo, invece, la differenza:
Q = 3 W1 - W2 .
(9.24)
Per verificare le due ultime relazioni (9.23) e (9.24), dobbiamo investigare bene
le relazioni di fase che intercorrono tra le tensioni concatenate e le correnti di
linea. Allo scopo seguite, aiutandovi con la Figura 9.32, il ragionamento relativo
al primo elemento della terna (gli altri si otterranno per successivi sfasamenti di
120°).
276 - Circuiti elettrici in evoluzione dinamica
V12
π/6
ϕ
E1
I1
Figura 9.32: tensione concatenata e corrente della prima linea.
Senza perdere di generalità, supponiamo che il carico sia di tipo ohmico-induttivo.
Allora, la tensione stellata E 1 è in anticipo rispetto alla corrente di linea I1 proprio
dell’angolo ϕ dell’impedenza Z. Inoltre, sempre la stellata E 1 è in ritardo rispetto
alla concatenata V12 di un angolo pari a π/6 radianti, cioè 30°. Concludiamo che la
concatenata V12 è in anticipo rispetto alla corrente della prima linea I1 di un angolo
pari a ϕ + π/6. Ciò comporta che, se assumiamo quale riferimento per le fasi
proprio la tensione concatenata V12, possiamo scrivere:
V12 = V , 0 , V23 = V , - 2 π , V31 = V , - 4 π ;
3
3
I1 = I , - ϕ - π , I2 = I , - ϕ - π - 2 π , I3 = I , - ϕ - π - 4 π .
6
6 3
6 3
Se poi ricordate che l’indicazione di un wattmetro consiste nel prodotto del valore
efficace della tensione rilevata dai morsetti voltmetrici per il valore efficace della
corrente rilevata ai morsetti amperometrici per il coseno della loro fase relativa,
otterrete senza alcuna difficoltà:
W1 = V I cos - π + ϕ + π = V I cos ϕ - π = V I
3
6
6
W2 = V I cos - 2 π + ϕ + π + 2 π = V I cos ϕ +
3
6 3
3 cos ϕ + 1 sen ϕ ;
2
2
π = V I 3 cos ϕ - 1 sen ϕ .
6
2
2
Se ora sommate membro a membro le due ultime relazioni, otterrete la (9.23),
peraltro già dimostrata nel caso generale di carico squilibrato. Ma, se sottraete
membro a membro, troverete la (9.24).
In definitiva, per un carico equilibrato, due wattmetri in inserzione Aron possono
darci non solo la misura della potenza attiva, ma anche quella della potenza
reattiva.
277 - Circuiti elettrici in evoluzione dinamica
Esempio 12 - Supponendo che la rete trifase di figura sia alimentata da una terna
simmetrica di tensioni stellate, determinare la corrente della prima linea dei due
carichi. Si assuma PM = 3 kW, QM = 3 kVar, R = 50 Ω, XL = XC = 100 Ω,
V12 = 380 V.
1
I1
I1M
I2
I2M
+
V12
−
2
M
I3
I3M
3
R
R
XL
XC
La prima cosa da osservare è che la rete trifase è composta da due carichi trifase,
uno equilibrato e l’altro squilibrato, posti in parallelo, cioè sono alimentati dalla
stessa terna di tensioni concatenate (o, se volete, dalle stesse tensioni stellate). Poi,
notate che il parallelo L-C è in risonanza e, pertanto, la rete può semplificarsi
come mostrato nella figura che segue.
278 - Circuiti elettrici in evoluzione dinamica
1
I1M
I1 = I1M + I
+
V12
− I2 = I2M - I
2
I
I2M
M
I3 = I3M
3
2R
Ora, le tre correnti che interessano il motore M costituiscono una terna di correnti
equilibrate, mentre le correnti di alimentazione I1, I2 e I3 sono squilibrate. Allora,
detta I la corrente del resistore 2R, risulta:
I = V12 = 3.80 A .
2R
Le tre correnti del motore possono determinarsi come segue. Dal legame con la
potenza attiva
PM = 3 V IM cos ϕ M ,
essendo
tan ϕ M = QM = 3
PM
3
→ ϕM = π ,
3
discende immediatamente che
IM =
PM
= 1000 3 A = 100 A ≅ 5.26 A .
19
3 V cos ϕ M 380 3 cos π
3
279 - Circuiti elettrici in evoluzione dinamica
e, quindi, dato che il fasore della corrente della prima linea del motore è in
ritardo di ϕM + π/6 rispetto a V12, risulta:
I1M = IM , - ϕ M - π = IM , - π = - j IM .
6
2
La LKC, infine, ci consente di concludere che
I1 = I1M + I = V12 - j IM ≅ (3.80 - 5.26 j) A .
2R
9.7 Rifasamento dei sistemi trifasi
Per il rifasamento di un sistema utilizzatore trifase (andate a rivedere anche
quanto detto a proposito del rifasamento monofase) si ricorre, generalmente, al
collegamento di condensatori a triangolo, come mostrato in Figura 9.33, in cui,
anche se non ci serviranno nel ragionamento che segue si sono pure indicate le
correnti di linea e del motore. Inoltre, il generico carico trifase è stato indicato in
figura con la lettera M, iniziale di motore.
1
+
I1M
I1
V12
−
2
M
I2M
I2
3
I3
XC
XC
I3M
XC
Figura 9.33: rifasamento di un carico trifase.
Per comprendere la ragione del collegamento a triangolo anziché a stella bisogna
considerare il fatto che, a parità di potenza reattiva assorbita, che è negativa
280 - Circuiti elettrici in evoluzione dinamica
trattandosi di condensatori, il costo di un condensatore cresce al diminuire della
tensione e al crescere della capacità, come accadrebbe se si passasse ad un
collegamento a stella dei condensatori. Ciò vale in maniera particolare per tensioni
non troppo elevate, quali si hanno negli impianti utilizzatori della maggior parte
delle industrie.
Per il calcolo delle capacità necessarie a rifasare un carico ohmico-induttivo, come
è un tipico motore, da un angolo di fase ϕ ad uno più piccolo ϕ' (< ϕ), possiamo
seguire il semplice schema proposto qui di seguito.
• Prima dell’inserimento della batteria di condensatori:
Q = tan ϕ → Q = P tan ϕ .
P
• Dopo l’inserimento della batteria di condensatori:
Q + QC = tan ϕ' → Q + Q = P tan ϕ' = P tan ϕ + Q .
C
C
P
Ora, dato che
2
QC = - 3 V = - 3 ω C∆ V2 ,
XC
segue che il valore della capacità da utilizzare per ottenere il desiderato
rifasamento vale:
QC = - 3 ω C∆ V2 = P (tan ϕ' - tan ϕ) → C∆ = P (tan ϕ - tan ϕ') .
3 ω V2
(9.25)
Generalmente le batterie di condensatori di rifasamento per sistemi trifasi sono
caratterizzate da due dati essenziali:
• la tensione concatenata V (tensione nominale) per la quale essi sono destinati;
• la potenza reattiva totale QC, considerata in valore assoluto, pur essendo noto
che, con le convenzioni da noi adottate, è negativa, che essi assorbono alla tensione
V.
281 - Circuiti elettrici in evoluzione dinamica
Per esercizio potete provare a calcolare le correnti di linea con e senza i
condensatori di rifasamento e a fare il rapporto tra i rispettivi valori efficaci.
Ricordate sempre che in quel che precede abbiamo parlato di rifasamento di un
carico ohmico-induttivo; nel caso duale di carico ohmico-capacitivo, poco
frequente nelle applicazioni, invece di una batteria di condensatori dovreste
adoperare un insieme di induttori. Provate da soli a discutere questo caso che si
trova, ad esempio, quando al posto del motore M considerate il caso di una
industria chimica dotata di celle galvaniche.
L’esempio che segue vi invita a trovare il valore delle capacità di rifasamento nel
caso di collegamento a stella dei condensatori.
Esempio 13 - Trovare il valore della capacità CY nel caso di collegamento a
stella dei condensatori di rifasamento.
1
I1
I1M
I2
I2M
+
V12
−
2
M
I3
I3M
3
XC
XC
XC
La potenza reattiva assorbita dai tra condensatori a stella vale:
2
QC = - 3 E = - 3 ω CY E 2 ,
XC
282 - Circuiti elettrici in evoluzione dinamica
essendo E il valore efficace della tensione stellata di alimentazione. Ora,
ricordando il legame tra tensione concatenata e stellata V = E 3, la precedente
relazione diventa:
QC = - ω CY V2 .
Allora, dato che
QC = P (tan ϕ' - tan ϕ) ,
otteniamo il valore di capacità desiderata
QC = - ω CY V2 . = P (tan ϕ' - tan ϕ) → CY =
P (tan ϕ - tan ϕ') .
ω V2
Come si evince dalla formula trovata, a parità di tutti glia altri parametri, il valore
di capacità nel caso di rifasamento a triangolo è tre volte più piccolo di quello
necessario per il rifasamento a stella:
C∆ = 1 CY .
3
9.8 Altri vantaggi dei sistemi trifasi
Nei paragrafi precedenti abbiamo prima parlato delle terne di tensioni o di
correnti, poi dei sistemi trifasi. In particolare abbiamo mostrato che, rispetto al
caso monofase, vi era un importante vantaggio: la potenza istantanea, in un sistema
trifase simmetrico ed equilibrato, è costante nel tempo.
Scopo di questo paragrafo è mostrare che, rispetto al caso monofase, esistono altri
vantaggi che hanno portato all’affermazione dei sistemi trifasi per il trasporto
dell’energia elettrica su grandi distanze.
Supponiamo di avere un certo utilizzatore U, ad esempio, una palazzina di tre
piani, caratterizzata da un certo fattore di potenza, cioè da un certo cos ϕ, e di
dover decidere se sia più conveniente alimentare questo carico secondo uno
schema monofase o trifase. Per effettuare questo confronto, è bene convincersi
subito che, a patto di adoperare lo stesso valore efficace di tensione sul carico, due
cose devono essere assunte uguali:
• la potenza dissipata lungo le linee, cioè quella perduta nel trasporto;
283 - Circuiti elettrici in evoluzione dinamica
• la potenza fornita al carico.
Consideriamo due sistemi, l’uno monofase e l’altro trifase, senza neutro, che siano
del tutto equivalenti secondo quanto in precedenza specificato. Potete immaginare
il sistema trifase come preferite, costituito, cioè, da tre impedenze disposte a
triangolo oppure a stella; ciò che stiamo per dire non ne risulterà influenzato. Per
questo, in Figura 9.34 abbiamo lasciato non meglio specificato il carico, sia nel
caso monofase, sia in quello trifase.
Uguagliando le due potenze assorbite dal carico sottoposto alle due diverse
alimentazione, possiamo scrivere
PD = V IM cos ϕ = 3 V IT cos ϕ → I M = 3 I T .
(9.26)
in cui IM e IT rappresentano, rispettivamente, i valori efficaci delle correnti di
alimentazione del caso monofase e di quello trifase.
IM
RM
+
U
V
IM
RM
I1T
RT
cos ϕ
(a)
−
V12 = V
1
+
I2T
RT
I3T
RT
V12
− 2
+
V23 3
−
U
cos ϕ
(b)
Figura 9.34: alimentazione (a) monofase e (b) trifase.
Uguagliando, invece, le potenze dissipate nel trasporto, risulta:
2 RM I 2M = 3 RT I 2T ,
(9.27)
284 - Circuiti elettrici in evoluzione dinamica
in cui RM e RT sono, rispettivamente, le resistenze offerte dai conduttori,
monofase e trifase, usati per il collegamento. Sostituendo la (9.26) nella (9.27),
otteniamo:
2 RM 3 I2T = 3 RT I 2T → 2 RM = R T .
Ora, ricordando il legame tra resistenza, resistività, sezione e lunghezza del
conduttore, e che i tratti di conduttore che collegano il carico al generatore sono
ugualmente lunghi (L) sia nel caso monofase, sia in quello trifase, otteniamo, detta
ρ la resistività dei conduttori, che
2 RM = R T → 2 ρL = ρL → S M = 2 S T .
SM ST
(9.28)
Già il risultato (9.28) mostra un ulteriore vantaggio dei sistemi trifasi: la sezione
dei conduttori del caso monofase è doppia rispetto a quella del caso trifase.
Intuiamo, pertanto, che ci sarà nel caso trifase un risparmio di volume di
materiale conduttore. Cerchiamo di capire quanto materiale in meno viene
impiegato, seguendo lo schema:
volume monofase = 2 SM L = 4 ST L ;
volume trifase = 3 ST L .
Dividendo membro a membro le precedenti relazioni, possiamo, in definitiva,
affermare che
volume trifase = 3 ,
volume monofase 4
cioè che vi è un risparmio del 25% in volume di conduttore utilizzato nel caso
trifase rispetto al caso monofase.
Questo semplice confronto basterebbe a giustificare la scelta della trasmissione con
sistemi trifasi; naturalmente ci sono altri aspetti del problema che non abbiamo
esaminato in quanto non congruenti con il livello di approfondimento della
questione al quale riteniamo di doverci mantenere, e che approfondirete durante il
corso di Impianti Elettrici.
9.9 Conclusioni
285 - Circuiti elettrici in evoluzione dinamica
Con questo paragrafo si conclude questo secondo volume dedicato allo studio delle
reti elettriche. In questi due volumi, il primo dedicato alle reti elettriche in regime
stazionario, il secondo a quelle in regime dinamico (con particolare enfasi al
regime sinusoidale), abbiamo cercato di spiegare, nella maniera più semplice
possibile, i metodi principali di studio delle reti elettriche. Abbiamo
volontariamente trascurato ogni collegamento alla affascinante teoria dei campi
elettrici e magnetici per dare risalto al problema della corretta soluzione di una
rete elettrica. Nel prosieguo dei vostri studi, quando studierete le macchine, gli
impianti, le misure o i circuiti elettronici, capirete sino in fondo il perché di
alcune nostre scelte. Di una cosa, però, dovete essere certi: che, quale che sia la
rete che incontrerete, che nasca dalla studio di un campo o da una macchina, voi
dovete saperla studiare. E se vi chiederanno lo studio delle dinamiche transitorie,
oppure volete solamente controllare la correttezza dei calcoli fatti a mano, non
dimenticate il simulatore Spice, il solo che può veramente aiutarvi a trattare
problemi nei quali il numero delle maglie cresce molto.
Abbiamo pure tralasciato alcune applicazioni che ci sembrava appesantissero
inutilmente la trattazione, ma che possono essere facilmente comprese una volta
assimilati i princìpi di base espressi in questi volumi. Ad esempio, abbiamo detto
che l’inserzione Aron non consente la misura della potenza reattiva per un sistema
squilibrato. Esistono tuttavia due altri tipi di inserzioni che possono essere usati
per risolvere questo problema e che sono mostrati in Figura 9.35.
1
(a)
+
+
W
W1
+
2
1
+
W
2
W2
3
C A
D B
(b)
+
+
W
W1
+
+
W
W2
3
+
+
W
W3
Figura 9.35: (a) inserzione Barbagelata e (b) inserzione Righi.
286 - Circuiti elettrici in evoluzione dinamica
L’inserzione Barbagelata (Figura 9.35a) permette di ricavare la potenza reattiva in
un sistema simmetrico squilibrato per mezzo della relazione
Q=
W1A - W2B + 2 W1C - W2D
,
3
in cui W1A, W2B, W1C e W2D sono le letture dei wattmetri con i commutatori posti
nelle posizioni A, B, C e D, rispettivamente.
L’inserzione Righi (Figura 9.35b), invece, permette di ricavare la potenza reattiva
in un sistema simmetrico squilibrato come
Q = W1 - W2 + 2 W3 ,
3
in cui W1, W2 e W3 rappresentano le indicazioni dei tre wattmetri.
Siamo sicuri che, con l’aiuto del vostro docente, riuscirete a dimostrare queste due
relazioni, sviluppando, tra le altre cose, anche un utile esercizio sui trifasi.
I metodi di misura delle potenze si convertono agevolmente in metodi di misura
delle energie sostituendo ai wattmetri ordinari i wattmetri integratori, più
conosciuti come contatori. Data l’importanza economica delle misure di energia, è
necessario fare uso di metodi che non risentano troppo delle dissimetrie (peraltro
di solito trascurabili), ma soprattutto degli squilibri (spesso imponenti) del sistema
trifase. Il problema può essere risolto usando l’inserzione Aron per le misure di
energia attiva, con il vantaggio di ottenere indicazioni corrette quale che sia il
grado di dissimetria e di squilibrio del sistema, e l’inserzione Righi per le misure
di potenza reattiva, ottenendo una valutazione accettabile del cos ϕ medio
qualunque sia il grado di squilibrio; purché la dissimetria sia abbastanza contenuta.
Torneremo a parlare più dettagliatamente dei contatori nel volume dedicato alle
misure.
Se poi, oltre ai tanti esempi che in questi due volumi abbiamo sviluppato, sentiste
il bisogno di farne degli altri, potete utilizzare il libro ‘Esercizi sui circuiti
elettrici’ di Andreotti, Davino e Verolino, nel quale troverete circuiti in regime
stazionario e sinusoidale, trifasi compresi, la maggior parte dei quali codificati
anche con Spice, e che costituirà un valido strumento per affinare la vostra
preparazione.
287 - Circuiti elettrici in evoluzione dinamica
Un’ultima osservazione prima di concludere. Con il crescere delle vostre
conoscenze matematiche, comprenderete meglio molti dei concetti che abbiamo
introdotto in questi due volumi e che abbiamo adoperato per l’analisi delle reti
elettriche: non dimenticate, pertanto, di rileggere, di tanto in tanto, i vostri libri di
Elettrotecnica. Teneteli sempre sotto mano: quale che sia il prosieguo dei vostri
studi, siamo sicuri, vi torneranno certamente utili.
288 - Circuiti elettrici in evoluzione dinamica
Appendice: impianti di distribuzione
Un impianto di distribuzione dell’energia elettrica per applicazioni industriali è
una rete più o meno complessa che assolve il compito di trasferire lavoro elettrico
da un insieme di generatori ad un certo insieme di utilizzatori o carichi. Il numero
ed il tipo degli utilizzatori collegati alla rete, salvo casi eccezionali, varia in
maniera impredicibile nel tempo e dipende dalle necessità degli utenti. Risulta,
quindi, di primaria importanza costruire la rete di distribuzione in modo che ogni
carico venga ad essere alimentato nelle condizioni nominali, indipendentemente dal
numero e dal tipo degli altri carichi collegati. Ora, questa esigenza può essere
soddisfatta nel modo più semplice attuando la rete in una delle due forme di
seguito descritte.
• Distribuzione in parallelo
Tutti i carichi sono collegati in parallelo tra loro e con un generatore di tensione;
in serie a ciascun carico è disposto un interruttore, come mostrato in Figura A.1.
I carichi vengono inseriti chiudendo gli interruttori; il generatore di tensione,
supposto ideale per semplicità, mantiene ai loro morsetti la tensione nominale
quale che sia il numero di carichi inseriti.
+
E
−
Figura A1: impianto di distribuzione in parallelo.
• Distribuzione in serie
Tutti i carichi sono collegati in serie tra loro e con un generatore di corrente; in
parallelo ad ogni carico è disposto un interruttore, come mostrato in Figura A.2.
I carichi vengono inseriti aprendo gli interruttori; il generatore, supposto ideale
per semplicità, mantiene ai loro morsetti la corrente nominale quale che sia il
numero di carichi.
289 - Circuiti elettrici in evoluzione dinamica
I
Figura A.2: impianto di distribuzione in serie.
I generatori industriali approssimano per lo più il comportamento di generatori
ideali di tensione e, per questa ragione, gli impianti di distribuzione dell’energia
elettrica sono di norma in parallelo. Vi sono, tuttavia, delle importanti eccezioni,
degne di essere messe in rilievo.
Gli impianti
elettrochimici sono caratterizzati da un valore molto elevato di
corrente assorbita da ciascuna cella, decine di migliaia di ampere ed anche oltre.
Ciò rende proibitiva la distribuzione in parallelo, nella quale il generatore
verrebbe ad essere percorso da una corrente somma delle correnti dei carichi.
Taluni impianti di distribuzione stradale vengono realizzati con una
distribuzione in serie che consente di alimentare tutte le lampade con la stessa
corrente, che si può rendere uguale a quella nominale, ottenendo prestazioni
nominali. Se si fosse adottato, invece, uno schema di distribuzione in parallelo, a
causa delle inevitabili cadute di tensione, le lampade più lontane dal generatore
sarebbero alimentate a tensione più bassa di quella nominale e fornirebbero,
pertanto, prestazioni inferiori a quelle di progetto.
In questi impianti, tutti in corrente alternata, il generatore è un particolare
trasformatore detto a corrente costante, di cui parleremo più approfonditamente
nel volume dedicato alle macchine elettriche. Inoltre, allo scopo di evitare la
brusca apertura del circuito in occasione della fulminazione di una lampada e,
quindi, i danni che deriverebbero dalle sovratensioni prodotte da questa apertura,
si dispone in parallelo a ciascuna lampada una valvola di tensione, costituita da una
pastiglia di materiale isolante, che viene perforata da una scarica e trasformata in
un corto circuito, quando la tensione ai morsetti della lampada interrotta supera un
prestabilito valore.
Un impianto di distribuzione dell’energia elettrica in parallelo può essere
effettivamente descritto mediante una rete di bipoli in parallelo solo se è possibile
trascurare le impedenze longitudinali dei tronchi di linea di collegamento: ciò
290 - Circuiti elettrici in evoluzione dinamica
accade, d’abitudine, se le distanze tra i carichi sono piuttosto piccole. In generale,
è necessario tenere in debito conto di tali impedenze longitudinali ed allora
l’impianto viene schematizzato come in Figura A.3.
+
E
−
Figura A.3: impianto di distribuzione in parallelo con linee di impedenza non
trascurabile.