Fondamenti e Concetti della Fisica
Contemporanea
Roberto Casalbuoni
Dipartimento di Fisica, Università di Firenze
Sezione INFN, Firenze
Istituto di Fisica Teorica Galileo Galilei, Arcetri, Firenze
Appunti delle lezioni tenute all’Universita’ di Firenze nell’a.a. 2013/2014
nell’ambito della
Laurea Magistrale in Logica, Filosofia e Storia della Scienza.
Indice
Indice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1 Spazio delle fasi in meccanica classica e meccanica quantistica
1.1 Spazio delle fasi classico . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Lo spazio delle fasi in meccanica quantistica . . . . . . . . . . . . .
1.2.1 Spazi vettoriali . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.2 Spazi vettoriali con prodotto interno . . . . . . . . . . . . .
1.2.3 La notazione di Dirac . . . . . . . . . . . . . . . . . . . . .
1.3 Variabili dinamiche in Meccanica Quantistica . . . . . . . . . . . .
1.3.1 Operatori lineari su uno spazio vettoriale . . . . . . . . . .
1.3.2 Il problema agli autovalori e equazione caratteristica . . . .
1.3.3 Funzioni di un operatore . . . . . . . . . . . . . . . . . . . .
1.4 Applicazione allo spin dell’elettrone . . . . . . . . . . . . . . . . . .
1.5 Spazi vettoriali infinito-dimensionali . . . . . . . . . . . . . . . . .
1.5.1 Operatori in dimensioni infinite . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
2
3
5
7
9
11
13
19
22
22
28
33
2 I postulati della meccanica quantistica
2.1 Il collasso del vettore di stato . . . . .
2.2 Come si verifica la teoria quantistica .
2.3 Valori medi (o di aspettazione) . . . .
2.4 Variabili compatibili e incompatibili .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
38
45
46
47
52
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3 Sistemi con piu’ gradi di liberta’
3.1 Generalizzazione dei postulati a sistemi con più gradi di libertà . . . . . . .
3.2 Prodotto tensoriale di spazi . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Particelle identiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1 Il caso classico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.2 Il caso di due particelle identiche. Stati simmetrici ed antisimmetrici
3.3.3 Quando si può ignorare la simmetrizzazione o l’antisimmetrizzazione
della funzione d’onda? . . . . . . . . . . . . . . . . . . . . . . . . . .
57
57
58
62
62
63
4 L’equazione di Schrödinger
4.1 Soluzione dell’equazione di Schrödinger . . . . . . . . . . . .
4.1.1 Scrittura dell’equazione di Schrödinger . . . . . . . .
4.1.2 Studio generale della soluzione . . . . . . . . . . . .
4.1.3 L’equazione di Schrödinger per una particella libera
4.2 Equazione di Schrödinger per due particelle . . . . . . . . .
67
67
67
67
70
71
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
65
4.3
Più particelle in più dimensioni . . . . . . . . . . . . . . . . . . . . . . . . . 73
5 Principio di indeterminazione e limite classico
74
5.1 Principio di indeterminazione . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.2 Teorema di Ehrenfest e limite classico . . . . . . . . . . . . . . . . . . . . . 75
5.3 La rappresentazione di Heisenberg . . . . . . . . . . . . . . . . . . . . . . . 79
6 Oscillatore armonico
81
6.1 Oscillatore classico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
6.2 Oscillatore quantistico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
7 Momento angolare e spin
86
7.1 Il momento angolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
7.2 Lo spin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
7.3 Addizione di momenti angolari . . . . . . . . . . . . . . . . . . . . . . . . . 91
8 Stati entangled
8.1 Stati a due particelle di spin 1/2 . . . . . . . . . . . .
8.2 Matrice densita’ . . . . . . . . . . . . . . . . . . . . .
8.3 Entropia e entanglement . . . . . . . . . . . . . . . . .
8.4 Matrice densita’ ridotta e misura dell’entanglement . .
8.5 L’esperimento della doppia fenditura e stati entangled
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
93
94
96
100
103
108
9 La critica EPR
113
9.1 EPR riformulato da Bohm e Aharanov . . . . . . . . . . . . . . . . . . . . . 116
9.2 Le teorie di variabili nascoste e la disuguaglianza di Bell . . . . . . . . . . . 121
9.3 Località . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
10 La misura in Meccanica Quantistica
10.1 Sistema e apparato di misura . . . . . . . . . . .
10.2 Misura e sovrapposizione degli stati macroscopici.
10.3 La decoerenza . . . . . . . . . . . . . . . . . . . .
10.4 Altre interpretazioni . . . . . . . . . . . . . . . .
11 Conclusioni
. . . . .
Il gatto
. . . . .
. . . . .
. . . . . . . . .
di Schrödinger
. . . . . . . . .
. . . . . . . . .
.
.
.
.
128
132
137
142
148
150
1
Capitolo 1
Spazio delle fasi in meccanica
classica e meccanica quantistica
1.1
Spazio delle fasi classico
Gli stati o le configurazioni di un sistema classico sono descritti da punti nello spazio delle
fasi. Questo concetto e’ molto generale. Nel caso piu’ semplice della meccanica classica
(un punto che si muova lungo una retta) , lo spazio delle fasi e’ un piano nelle variabili di
posizione q e di impulso p. I moti possibili del punto corrispondono a fasci di traiettorie
non intersecanti. Infatti, date le equazioni di Hamilton, del primo ordine nelle derivate
temporali, per ogni punto passa una ed una sola traiettoria fisica. Questa idea si puo’
generalizzare ad un insieme generico di punti (anche discreto). E la meccanica classica
puo’ essere caratterizzata dai seguenti elementi:
• Un insieme di punti, ognuno dei quali corrisponde ad un determinato stato fisico,
cioe’ lo spazio delle fasi, M .
• Le osservabili classiche, cioe’ funzioni reali definite su M .
Le operazioni che si possono fare su un insieme di punti sono quelle classiche dell’algebra
booleana, unione e intersezione di sottoinsiemi. Per esempio si puo’ considerare l’unione
di tutte i punti (configurazioni) che soddisfano le proprietà A o B, ecc. L’esempio classico
piu’ semplice e’ il sistema con uno spazio delle fasi costituito da due punti. Fisicamente
questo puo’ corrispondere alle due facce di una moneta. In questo caso i due punti si
possono caratterizzare con i due simboli T e C (testa e croce rispettivamente), oppure con
0 e 1. In questo caso si parla di un bit classico. I bit classici hanno grande importanza
perche’ possono essere messi in corrispondenza con i simboli fondamentali della numerazione binaria e, quindi, ogni numero puo’ essere rappresentato da una successione di 0 e
1. Per esempio:
910 = 1 × 23 + 0 × 22 + 0 × 21 + 1 × 20 = 10012 .
(1.1)
E’ su questa corrispondenza che si basano i moderni calcolatori digitali in cui, appunto,
tutte le informazioni vengono digitalizzate in termini di 0 ed 1. Notiamo anche con N
2
copie di coppie 0 e 1 si possono formare 2N stati diversi. Detto in altri termini, con N
monete si possono ottenere una successione di 2N simboli 0 ed 1.
Dunque il sistema logico che sta alla base della meccanica classica e’ quello degli
insiemi con le conseguenti operazioni associate. Come vedremo la situazione e’ molto
diversa in meccanica quantistica, dove lo spazio delle configurazioni e’ costituito da uno
spazio vettoriale. Dunque gli stati, o i punti di questo spazio, sono vettori e come tali
possono essere combinati lineramente. Questa operazione, che e’ possibile in uno spazio
vettoriale, non ha senso su un insieme, corrispondentemente la struttura logica risulta
totalmente diversa.
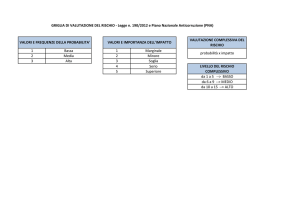
C
T
Figura 1.1: Un sistema a due stati classico. Le due facce di una moneta, T e C.
Per esempio, un sistema a due stati classico (vedi Fig. 1.1) corrisponde, in meccanica
quantistica a uno spazio vettoriale complesso (daremo le opportune definizioni generali in
seguito), in cui i vettori si possono scrivere come combinazioni di due vettori fondamentali
|0i e |1i
|ψi = α|0i + β|1i
(1.2)
con α e β numeri complessi. Dunque, mentre lo spazio delle fasi classico di questo esempio
e’ costituito da due punti, nel caso quantistico lo stato generico dipende da una doppia
continuita’ di parametri. Cioe’ tornando all’esempio del lancio di una moneta e’ come se
stessimo considerando una situazione in cui dopo il lancio la moneta non è ne’ testa ne’
croce.
1.2
Lo spazio delle fasi in meccanica quantistica
Abbiamo visto che l’esperimento di Stern e Gerlach mette in luce il fatto che l’elettrone
/ /2 in qualunque
possiede un momento angolare intrinseco che assume due soli valori ±h
direzione si misuri questa osservabile. Il momento angolare intrinseco prende anche il
nome di spin.
In questo esperimento e’ possibile preparare lo stato di spin, per esempio orientando
l’apparato in una certa direzione e selezionando solo il fascio di elettroni parallelo alla direzione del campo magnetico e bloccando l’altro fascio. Questo tipo di procedura si chiama
preparazione del sistema. Lo stesso apparato puo’ essere usato per la rivelazione. Per
esempio se mettiamo due Stern e Gerlach orientati nello stesso modo (sempre bloccando
il fascio che esce dal primo apparato con direzione opposta al campo), il secondo apparato
3
ci serve per rivelare che effettivamente gli elettroni hanno spin lungo il campo. Piu’ in
generale, se il secondo Stern e Gerlach e’ orientato diversamente dal primo, ci puo’ servire
per determinare quanti elettroni passano orientati lungo la sua direzione positiva e quanti
lungo la direzione negativa.
Nella discussione che segue faremo uso di un apparato di rivelazione e di preparazione
diverso da uno Stern e Gerlach convenzionale ma del tutto equivalente. L’apparato e’
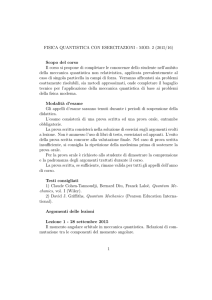
illustrato in Fig. 1.2. L’elettrone e’ posto in un campo magnetico abbastanza intenso.
B
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
xxxxxxxxxxxxxx
x
x
x
x
x
θx
Figura 1.2: Rappresentazione classica di un elettrone in un campo magnetico che
forma un angolo θ con lo spin.
~ dell’elettrone si allinea con il campo B.
~ Questa fase
Dopo qualche tempo lo spin, S,
corrisponde alla preparazione dello stato. Se vogliamo usare l’apparato come rivelatore,
sfruttiamo il seguente meccanismo. Come abbiamo detto se lo spin ed il campo non sono
paralleli, dopo un certo tempo lo spin si allinea ma, cosi facendo, emette una radiazione
elettromagnetica con intensita’ che dipende dall’angolo θ tra i due vettori. Se lo spin e’
allineato, θ = 0, non c’e’ irradiazione. Quanto sopra e’ quanto prevede la teoria classica.
Quantisticamente invece si hanno solo due possibilita’:
~
1. L’elettrone non emette fotoni se lo spin e’ allineato con B.
2. L’elettrone emette un fotone di energia pari alla differenza di energia tra gli stati di
~
spin parallelo ed antiparallelo a B.
Ne consegue, nei due casi, che
~ parallelo a B
~
1. L’elettrone aveva S
~ antiparallelo a B.
~
2. L’elettrone aveva S
Come si vede il risultato e’ esattamente analogo a quanto si aveva per Stern e Gerlach, lo
spin puo’ essere solo parallelo od antiparallelo al campo magnetico. Non ci sono situazioni
~ perpendicolari a B,
~
intermedie. Comunque si sia preparato lo stato, per esempio con S
4
quando riveliamo lo stato troviamo solo i due stati parallelo ed antiparallelo. Questo
e’ vero comunque si sia preparato lo stato di spin. Quindi lo spin puo’ esere orientato
lungo qualunque direzione (dipendente da come lo abbiamo preparato), ma alla fine si
hanno solo due risultati possibili. Questo e’ il classico esempio di un bit quantistico o
q-bit. I possibili risultati della misura sono solo due, ma lo stato dipende dalla direzione
arbitraria lungo la quale e’ stato preparato. Il bit classico dipende invece solo dai due
possibili risultati. Nel lancio di una moneta si ha testa o croce. Un vago analogo del caso
quantistico si ha se la moneta non e’ perfetta e quindi le probabilita’ che escano testa o
croce sono diverse, ma non esiste uno stato classico che sia una combinazione lineare di
testa e croce.
Abbiamo detto gli stati possibili per lo spin di un elettrone sono due, corrispondenti
/ /2. In corrispondenza introdurremo i due vettori
ai due valori misurati ±h
|+i,
|−i
(1.3)
Come abbiamo detto, in meccanica quantistica gli stati del sistema sono descritti da un
vettore e quindi si possono combinare linearmente tra di loro. Quindi una combinazione
arbitraria dei due stati precedenti descrivera’ un possibile stato del sistema
|ai = a1 |+i + a2 |−i
(1.4)
Se consideriamo il caso a due stati classico, la moneta, come potremmo interpretare questa combinazione? Certamente non potremo dire che dopo il lancio la moneta non da’
come risultato ne’ testa ne’ croce. L’intepretazione quantistica e’ che i moduli quadri dei
coefficienti forniscano la probabilita’ di avere l’elettrone con spin up o spin down rispettivamente. Notiamo che i coefficienti a1 e a2 sono le componenti del vettore |ai lungo le due
direzioni |±i. Nel calcolo vettoriale ordinario e’ possibile calcolare la componente di un
vettore lungo una direzione specificata da un versore ~n effettuando il prodotto scalare del
vettore con il versore. Dunque la matematica necessaria per descrivere lo spazio delle fasi
della meccanica quantistica e’ quella degli spazi vettoriali che, come vedremo, sono spazi
vettoriali complessi (cioe’ i coefficienti a1 e a2 sono numeri complessi), equipaggiati con
un prodotto scalare. Nei paragrafi successivi introdurremo i concetti fondamentali relativi
agli spazi vettoriali complessi.
1.2.1
Spazi vettoriali
Come abbiamo gia’ anticipato lo spazio delle fasi quantistico non e’ altro che uno spazio
vettoriale complesso. In questa sezione daremo le definizioni necessarie per comprendere
la struttura di questi spazi e come si opera su di essi.
Uno spazio vettoriale, V , è una collezione di oggetti (vettori), {v1 , · · · , vn } ∈ V sui
quali è definita una operazione di addizione ed una di moltiplicazione per quantita’ scalari
{α, β, γ, · · · } ∈ F (usualmente numeri reali o complessi a seconda della natura dello spazio
5
vettoriale, vedi in seguito), tali che
1)
v+w ∈V
2)
αv ∈ V, se v ∈ V, α ∈ F
(1.5)
F è detto il campo degli scalari e su F sono definite le operazioni di addizione e di prodotto (α + β ∈ F , αβ ∈ F ). Le due operazioni definite sui vettori soddisfano una serie di
proprietà che si possono dividere in due classi:
Assiomi per l’addizione
i)
vi + v j = vj + vi
ii)
vi + (vj + vk ) = (vi + vj ) + vk
iii)
∃ vettore nullo, 0, vi + 0 = 0 + vi = vi
iv)
∃ unico vettore, (−vi ), tale che, vi + (−vi ) = 0
(1.6)
Queste proprietà si sintetizzano dicendo che V è uno gruppo abeliano rispetto alla somma.
In particolare, iii) e iv) mostrano che V possiede l’elemento identità (il vettore nullo) e
l’inverso di ogni elemento v (−v).
Assiomi per la moltiplicazione con gli scalari
i)
ii)
α(vi + vj ) = αvi + αvj ,
α ∈ F, vi , vj ∈ V
(α + β)vi = αvi + βvi
iii)
α(βvi ) = (αβ)vi
iv)
1vi = vi ,
1∈F
(1.7)
dove 1 e’ l’identità nel campo F degli scalari, cioè 1α = α.
Il vettore nullo soddisfa:
1)
0v = 0 (0 = identità scalare, 0 = vettore nullo)
2)
α0 = 0
3)
(−1)v = (−v)
(1.8)
Un insieme di n vettori non nulli si dice linearmente indipendente se non ci sono
soluzioni scalari all’equazione
n
X
α i vi = 0
(1.9)
i=1
eccetto per la soluzione banale αi = 0.
Si dice che uno spazio vettoriale è n-dimensionale, se ammette al più n vettori linearmente indipendenti. Denoteremo uno spazio vettoriale n-dimensionale su
F con il simbolo V n (F ). Su tale spazio vale il seguente:
6
Teorema: Dati n vettori linearmente indipendenti (v1 , v2 , · · · , vn ), ogni altro vettore
v ∈ V n (F ) può essere scritto come combinazione lineare degli n vettori.
È opportuno osservare che gli assiomi che definiscono uno spazio vettoriale permettono
di sviluppare rapidamente il calcolo vettoriale. Consideriamo due vettori in V 3 (R) espressi
una data base (v1 , v2 , v3 ):
v = α1 v1 + α2 v2 + α3 v3
v0 = β1 v1 + β2 v2 + β3 v3
(1.10)
Ovviamente i due vettori si possono sommare con la regola del parallelogrammo, ma
usando gli assiomi si vede subito che si può fare la somma per componenti
v + v0 = (α1 v1 + α2 v2 + α3 v3 ) + (β1 v1 + β2 v2 + β3 v3 ) =
= (α1 + β1 )v1 + (α2 + β2 )v2 + (α3 + β3 )v3
(1.11)
Quindi le componenti del vettore somma sono la somma delle componenti dei due vettori.
Analogamente
αv = α(α1 v1 + α2 v2 + α3 v3 ) = (αα1 )v1 + (αα2 )v2 + (αα3 )v3
(1.12)
e vediamo che le componenti di αv sono il prodotto delle componenti di v per α. Le
due regole precedenti si estendono immediatamente a V n (F ). Il punto importante è che
assegnata una base un generico vettore in V n (F ) si rappresenta in maniera univoca in
termini delle n-uple delle sue componenti
v=
n
X
αi vi ⇒ v = (α1 , α2 , · · · , αn )
(1.13)
i=1
1.2.2
Spazi vettoriali con prodotto interno
Nell’esempio illustrato all’inizio i coefficienti dell’espansione di uno stato su una base
possono essere estratti tramite le proiezioni del vettore lungo le direzioni della base. A
questo fine e’ necessario introdurre il concetto di prodotto scalare o prodotto interno di
due vettori.
Un prodotto interno in uno spazio vettoriale associa a due vettori di V uno scalare di
F . Cioè è un mapping bilineare V × V → F che soddisfa ai seguenti assiomi:
i)
ii)
iii)
hv|vi ≥ 0
(= 0 se e solo se v = 0)
hvi |vj i = hvj |vi i∗
hvi |αvj + βvk i = αhvi |vj i + βhvi |vk i
7
(1.14)
L’operazione ∗ qui introdotta è la coniugazione complessa se F = C il campo dei complessi.
È invece l’operazione identità nel caso dei reali. Noi lavoreremo quasi sempre nel campo
complesso. La proprietà ii) dice che il prodotto interno (o prodotto scalare) è simmetrico
sui reali, mentre si dice hermitiano per il caso complesso. La proprietà iii) esprime
la linearità del prodotto interno rispetto al secondo vettore, mentre rispetto al primo è
antilineare. Infatti
hαvi |vj i = hvj |αvi i∗ = (αhvj |vi i)∗ = α∗ hvi |vj i
(1.15)
Uno spazio vettoriale sul quale sia definito un prodotto interno si chiama spazio
vettoriale con prodotto interno. In un tale spazio si può definire la norma di un
vettore:
p
|v| = hv|vi
(1.16)
Un vettore si dice normalizzato o vettore unitario se ha norma pari ad uno. Due
vettori si dicono ortogonali se il loro prodotto scalare è nullo
hv|wi = 0 ⇔ v⊥w
(1.17)
Un insieme di vettori (e1 , e2 , · · · , en ) è detto ortonormale se
hei |ej i = δij
dove δij è la delta di Kronecker, definita da
n
1,
δij =
0,
(1.18)
i=j
i 6= j
(1.19)
Il prodotto scalare espresso in termini delle componenti in una base ortonormale e’ dato
da
n
n
X
X
hv|v0 i =
αi∗ βj hei |ej i =
αi∗ βi
(1.20)
i,j=1
i=1
Notiamo che nel caso complesso, l’operazione ∗ che appare nell’assioma ii) è cruciale
affinché valga la i).
Una proprietà importante del prodotto interno è quella che va sotto il nome di disuguaglianza di Schwarz:
|hvi |vj i|2 ≤ |vi |2 |vj |2
(1.21)
l’uguaglianza vale solo quando vi ∝ vj ossia vi e vj sono paralleli.
Un’altra importante disuguaglianza a cui soddisfa il prodotto interno è la disuguaglianza triangolare:
|vi + vj | ≤ |vi | + |vj |
(1.22)
8
1.2.3
La notazione di Dirac
Dirac ha introdotto una notazione particolarmente felice per la descrizione di uno spazio vettoriale. Abbiamo già osservato che un vettore è completamente specificato assegnando le sue componenti rispetto a una base fissata. Per esempio, scegliendo una base
ortonormale
n
X
v=
ei vi
(1.23)
i=1
tutte le operazioni sui vettori si riportano ad operazioni sulle componenti vi . pertanto
esiste una corrispondenza biunivoca tra il vettore v e la n-upla delle sue componenti in
una data base
v1
v2
·
v⇔
(1.24)
·
·
vn
In questa base ortonormale il prodotto interno si può scrivere nella seguente forma:
0
v1
n
X
·
0
∗ 0
∗
∗
(1.25)
hv|v i =
vi vi = v1 · · · vn
·
i=1
·
vn0
dove abbiamo associato al vettore v la n-upla v1∗ · · · vn∗ . Si introducono allora i vettori
ket che corrispondono ai vettori colonna, cioè
v1
·
|vi ⇔
(1.26)
·
·
vn
e i vettori bra che corrispondono ai vettori riga:
hv| ⇔ v1∗ · · ·
vn∗
(1.27)
La rappresentazione che associa il bra al vettore v è anche detta duale di quella che ne
associa il ket. Notiamo che in notazione matriciale la rappresentazione duale è ottenuta
tramite le operazioni di trasposizione del vettore colonna e di coniugazione complessa.
L’insieme di queste due operazioni costituisce l’ aggiunto. In forma astratta fa passare
dai ket ai bra e viceversa
hv| = |vi†
(1.28)
Si richiede anche che
(|vi† )† = |vi
9
(1.29)
Nella base (1.23) i vettori base hanno la rappresentazione:
0
·
·
·
|ei i ≡ |ii ⇔
1 → iesimo posto
·
·
·
(1.30)
0
Ovviamente ogni ket si scrive in questa base come
X
|vi =
vi |ii
(1.31)
i
mentre i bra
hv| =
X
vi∗ hi|
(1.32)
i
Ogni equazione che vale per i ket può essere trasformata in una equazione per i bra,
semplicemente prendendo l’aggiunto. L’ortonormalità dei vettori di base si scrive nella
forma
hi|ji = δij
(1.33)
Se un ket ha la decomposizione
|vi =
X
vi |ii
(1.34)
i
le sue componenti si calcolano prendendone il prodotto interno con i vettori di base:
X
X
hj|vi =
vi hj|ii =
vi δij = vj
(1.35)
i
i
Segue l’espressione
|vi =
X
|iihi|vi
(1.36)
i
Analogamente si hanno le relazioni
hv| =
X
hv|ji =
X
hv| =
X
hi|vi∗
i
hi|jivi∗ = vj∗
i
hv|iihi|
(1.37)
i
L’ultima equazione si poteva anche ottenere prendendo l’aggiunta della (1.36)
X
X
hv| =
hi|vi∗ hi| =
hv|iihi|
i
i
10
(1.38)
Un importante teorema sugli spazi vettoriali è il seguente
Teorema: Il numero massimo di vettori ortogonali in uno spazio vettoriale è uguale al
numero massimo di vettori linearmente indipendenti.
Un sottospazio di uno spazio vettoriale, che sia anch’esso uno spazio vettoriale, è detto
un sottospazio vettoriale.
1.3
Variabili dinamiche in Meccanica Quantistica
Abbiamo visto che in meccanica classica una variabile dinamica e’ una funzione del punto
nello spazio delle fasi. Spesso pero’ le variabili dinamiche classiche hanno anche altre funzioni, cioe’ quelle di generare delle trasformazioni nello spazio delle fasi, cioe’ il passaggio
da un punto dello spazio delle fasi ad un altro. Un esempio e’ l’hamiltoniana che, tramite
le equazioni del moto hamiltoniane, genera un flusso nello spazio delle fasi. Nel caso di
un sistema discreto un moto si puo’ pensare come ad una successione discreta di intervalli
temporali tali che ad ogni intervallo corrisponde il passaggio da un punto ad un altro. Una
esemplificazione nel caso del sistema a due stati e’ dato in Fig. 1.3. Nel caso di sinistra
T
C
T
C
Figura 1.3: Possibili moti in un sistema a due stati classico.
questo corrisponde ad una serie di lanci in cui si alternano indefinitamente testa e croce.
Il secondo caso corrisponde invece ad una serie di lanci in cui esce sempre testa oppure
croce. Nel caso classico si ha che anche altri importanti operatori, come l’impulso od il
momento angolare, danno luogo a trasformazioni nello spazio delle fasi corrispondenti rispettivamente a traslazioni e rotazioni. Quindi, in generale, le variabili dinamiche classiche
possono essere pensate come delle funzioni che servono per generare delle trasformazioni
nello spazio delle fasi, cioe’ mapping di punti in punti. In maniera analoga penseremo a
delle variabili dinamiche quantistiche come a degli oggetti che possono trasformare vettori
in vettori. Le grandezze che hanno questa caratteristica sono ben studiate in matematica
e si chiamano operatori lineari su uno spazio vettoriale. La parola operatore ricorda
che la grandezza opera su un vettore e lo trasforma in un altro, mentre lineare ricorda che
la trasformazione deve rispettare le caratteristiche di linearita’ di uno spazio vettoriale.
Dunque un operatore lineare trasforma uno stato fisico (un vettore) in un altro stato fisico.
Mostreremo successivamente quali sono le caratteristiche di un operatore che si associano
alle grandezze corrispondenti che si misurano.
11
In meccanica classica le variabili dinamiche corrispondono a quantita’ osservabili, cioe’
misurabili sperimentalmente. Il valore aspettato di una data osservabile ad un certo istante
e’ semplicemente il valore della variabile corrispondente calcolata sul punto dello spazio
delle fasi che corrisponde allo stato del sistema a quell’istante. Inoltre l’insieme delle misure
che si possono fare corrisponde ad un insieme di numeri reali. Come possiamo generalizzare
questa idea al caso di operatori lineari? In genere un operatore lineare mappa un vettore
in un vettore diverso. Quindi se vogliamo associare il valore dell’osservabile misurata ad
un dato operatore, dovremo pensare che il sistema si trovi in uno stato che e’ lasciato
inalterato dall’operatore. Cio’ che in genere succede e’ che per un dato operatore esistono
dei vettori (autovettori) con tale proprieta’, cioe’
A|vi = λ|vi
(1.39)
Questa equazione dice appunto che il ket |vi e’ lasciato inalterato (conserva la direzione)
dall’azione dell’operatore A, salvo un fattore moltiplicativo, λ, che e’ detto autovalore di
A. Dunque, nello stato |vi, si puo’ associare ad A un numero ben preciso, l’autovalore λ.
Notiamo che se e’ possibile associare ad una quantita’ osservabile corrispondente all’operatore A due valori distinguibili sperimentalmente, i corrispondenti vettori di stato devono
essere ortogonali. Infatti se misuriamo l’osservabile e misuriamo il valore λ1 , lo stato corrispondente deve essere il corrispondente autostato e quindi non puo’ avere componente
sullo stato con autovalore λ2 , altrimenti lo stato su cui abbiamo misurato λ1 dovrebbe
avere una espressione del tipo
|ψi = a1 |λ1 i + a2 |λ2 i
(1.40)
Ma questo stato, contrariamente all’ipotesi, non e’ autostato di A. Dunque se misuriamo una osservabile, in genere i valori che si ottengono sono numeri reali e gli stati
corrispondenti devono essere ortogonali. Gli operatori hermitiani (vedi in seguito) godono esattamente di queste proprieta’, cioe’ hanno autovalori reali ed i corrispondenti
autovettori formano una base ortonormale dello spazio vettoriale. Inoltre, in uno spazio
n-dimensionale, un operatore hermitiano ha n-autovalori reali. Da qui in avanti useremo
osservabile ed operatore hermitiano come sinonimi. Pertanto, se il sistema si trova in
un autostato (o autovettore) di un’osservabile, il risultato della misura sara’ con certezza
l’autovalore corrispondente.
Ovviamente, non sempre il sistema si trovera’ in un autostato dell’osservabile che
vogliamo misurare. E’ in questa situazione che nasce la necessita’ dell’interpretazione
probabilistica della meccanica quantistica. Infatti in questa situazione non c’e’ un unico
autovalore di A associato allo stato. Infatti la decomposizione del vettore di stato in
autovettori dell’osservabile che si misura, coinvolge, in genere, tutti gli autostati di A:
X
|ψi =
ai |ii,
A|ii = λi |ii
(1.41)
i
con ai le proiezioni di |ψi lungo gli autovettori |ii, cioe’
ai = hi|ψi
12
(1.42)
Dunque l’unica cosa che potremo fare sara’ quella di associare i coefficienti ai alla probabilita’ di ottenere come risultato della misura λi . Pero’ una probabilita’ deve essere una
quantita’ definita positiva e minore di 1. Questa condizione e’ soddisfatta se assumiamo
la probabilita’ di ottenere λi come
P (λi ) = |ai |2 = |hi|ψi|2
(1.43)
Infatti questa e’ una quantita’ positiva e minore di uno se il vettore di stato |ψi e’
normalizzato
X
hψ|ψi =
|ai |2 = 1
(1.44)
i
La proprieta’ per cui la probabilita’ di misurare un qualunque valore di A deve essere
minore di 1 e’ automaticamente soddisfatta per vettori normalizzati. Se poi il vettore e’
un autovettore di A con autovalore λi , la probabilita’ di trovare λi come risultato della
misura e’ uguale a 1, mentre la probabilita’ di trovare un valore λj con j 6= i e’ zero.
1.3.1
Operatori lineari su uno spazio vettoriale
Un operatore A è una istruzione che trasforma un vettore in un altro vettore. Cioè A è
un mapping dello spazio vettoriale V in sé:
A: V →V
(1.45)
L’azione di A sui vettori si rappresenta nel seguente modo
|v 0 i = A|vi
(1.46)
Dato che stiamo considerando spazi vettoriali gli unici operatori che hanno senso, cioè che
trasformano lo spazio vettoriale in un altro spazio vettoriale sono quelli che ne preservano
la struttura lineare. Gli operatori con questa proprietà sono detti operatori lineari. Più
precisamente un operatore è lineare se soddisfa la seguente proprietà:
A(α|vi + β|wi) = αA|vi + βA|wi
(1.47)
Un operatore A può agire anche sui bra:
(hv|α + hw|β)A = hv|Aα + hw|Aβ
(1.48)
Si può definire un’algebra1 di operatori, introducendo il prodotto e la somma di due
operatori tramite le relazioni:
i)
ii)
(A1 A2 )|vi = A1 (A2 |vi)
(A1 + A2 )|vi = A1 |vi + A2 |vi
1
(1.49)
Un’algebra è uno spazio vettoriale, V , nel quale sia definito il prodotto di due vettori, come
un mapping bilineare V × V → V
13
nonché il prodotto di uno scalare per un operatore
iii)
(αA)|vi = α(A|vi)
(1.50)
È importante osservare che il prodotto di due operatori in genere non è commutativo, cioè
A1 A2 6= A2 A1
(1.51)
Il grado di non commutatività è definito in termini di una quantità detta commutatore
[A1 , A2 ] = A1 A2 − A2 A1
(1.52)
Due proprietà molto utili del commutatore, che si verificano immediatamente usando
la definizione, sono le seguenti:
[A, BC] = B[A, C] + [A, B]C,
[AB, C] = A[B, C] + [A, C]B
(1.53)
Se esiste, l’inverso di un operatore A lo si scrive A−1 ed è definito da
AA−1 = A−1 A = I
(1.54)
con I l’operatore identità. L’inverso del prodotto di due operatori è uguale al prodotto
degli inversi, cioè
(AB)−1 = B −1 A−1
(1.55)
Abbiamo visto che un vettore in una data base corrisponde ad una ennupla di numeri,
le sue componenti in quella base. Analogamente, in una data base, un operatore lineare è
rappresentato da una matrice di n × n numeri, i suoi elementi di matrice. Ovviamente i
valori degli elementi di matrice dipendono dalla base scelta, ma il loro uso risulta estremamente conveniente. Un operatore è completamente assegnato una volta che ne sia stata
definita l’azione sugli elementi di una base. In particolare si possono facilmente calcolare
le componenti del ket trasformato sotto l’azione dell’operatore. Se
|v 0 i = A|vi
(1.56)
segue
vi0 = hi|v 0 i = hi|A|vi = hi|A
X
vj |ji =
j
X
hi|A|jivj
(1.57)
j
Posto
Aij = hi|A|ji
(1.58)
X
(1.59)
segue
vi0 =
Aij vj
j
Quindi l’azione dell’operatore si può valutare agendo con i suoi elementi di matrice sulle
componenti del vettore iniziale. Nella data base il vettore iniziale è rappresentato da un
vettore colonna e l’azione dell’operatore è semplicemente il prodotto della matrice che
14
lo rappresenta per il vettore colonna con la consueta definizione di prodotto righe per
colonne.
Gli elementi di matrice dell’operatore identità si calcolano immediatamente:
hi|I|ji = hi|ji = δij
(1.60)
Quindi l’operatore identità in una base ortonormale corrisponde alla matrice identità.
Ricordiamo che abbiamo dimostrato la relazione
|vi =
n
X
|iihi|vi
(1.61)
i=1
che può essere riscritta nella forma
n
X
|vi =
!
|iihi| |vi
(1.62)
i=1
Questa relazione ci dice che l’espressione in parentesi altro non è che un operatore che
applicato al ket |vi lo riproduce. Quindi si ha
!
n
X
I=
(1.63)
|iihi|
i=1
È interessante considerare le quantità |iihi| come operatori. La loro azione è data da
(|iihi|) |vi = |iihi|vi = vi |ii
(1.64)
Questi operatori sono definiti proiettori
Pi = |iihi|
Vediamo che
n
X
Pi = I
(1.65)
(1.66)
i=1
Inoltre i proiettori definiscono la seguente algebra2
Pi Pj = |iihi|jihj| = δij |iihi| = δij Pi
(1.67)
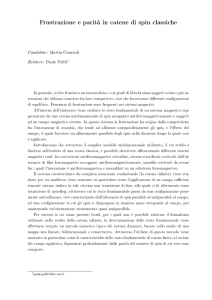
Il contenuto fisico di questa equazione può essere capito considerando gli analizzatori di
polarizzazione, che in pratica funzionano come proiettori, vedi Fig 1.4.
L’azione dei proiettori sui bra si ottiene facilmente
hv|Pi = hv|iihi| = vi∗ hi|
2
(1.68)
La proprietà Pi2 = Pi ha il nome di idempotenza, mentre Pi Pj = 0 per i 6= j si chiama
ortogonalità
15
Py
Py
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
xxxxxxxxxxxxx
E
xxxxxxxxx
xxxxxxxxx
xxxxxxxxx
xxxxxxxxx
xxxxxxxxx
xxxxxxxxx
xxxxxxxxx
xxxxxxxxx
xxxxxxxxx
xxxxxxxxx
xxxxxxxxx
xxxxxxxxx
xxxxxxxxx
xxxxxxxxx
xxxxxxxxx
xxxxxxxxx
xxxxxxxxx
xxxxxxxxx
xxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
Ey
Px
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxx
xxx
xx
xx
xx
xxx
xx
xxx
xx
xxx
xx
x
xx
xx
Ey
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxx
0
Figura 1.4: Gli analizzatori si comportano come operatori di proiezione. Il primo
analizzatore seleziona la componente y del campo. Dato che il secondo analizzatore
ha lo stesso orientamento del primo, il campo passa inalterato (corrisponde a Py2 =
Py ). Il terzo analizzatore proietta nella direzione ortogonale x e quindi il risultato è
zero (corrisponde a Px Py = 0).
Si ha
hj|Pi |ki = hj|iihi|ki = δij δik
(1.69)
Il prodotto di due operatori in termini di matrici si ottiene da AB
(AB)ij = hi|AB|ji = hi|AIB|ji =
n
X
hi|A|kihk|A|ji =
k=1
n
X
Aik Bkj
(1.70)
k=1
Definiamo adesso l’ aggiunto di un operatore. Sia:
A|vi = |v 0 i
(1.71)
Il bra che corrisponde a |v 0 i lo scriveremo come
hv 0 | ≡ hv|A†
(1.72)
hv|A† = (A|vi)†
(1.73)
od anche
Questa relazione definisce l’aggiunto di A come un operatore sullo spazio dei bra. Possiamo
calcolare gli elementi di matrice dell’aggiunto. Avremo
(A† )ij = (hi|A† )|ji = [hj|(A|ii)]∗ = hj|A|ii∗ = A∗ji
(1.74)
(A† )ij = A∗ji
(1.75)
cioè
16
Una proprietà importante riguarda l’aggiunto del prodotto di operatori
(AB)† = B † A†
(1.76)
Ovvero, l’aggiunto del prodotto è uguale al prodotto degli aggiunti in ordine inverso.
Consideriamo infatti
(AB)|vi = |v 00 i
(1.77)
e poniamo
B|vi = |v 0 i,
A|v 0 i = |v 00 i
(1.78)
Avremo
hv 00 | = hv 0 |A† = hv|B † A†
(1.79)
hv 00 | = hv|(AB)†
(1.80)
Ma per definizione
e quindi confrontando queste due equazioni
(AB)† = B † A†
(1.81)
Classi importanti di operatori sono gli operatori hermitiani
A† = A
(1.82)
A† = −A
(1.83)
e gli operatori anti-hermitiani
Ogni operatore può essere sempre decomposto
anti-hermitiana
1
A = (A + A† ) +
|2 {z }
hermitiano
in una parte hermitiana ed in una parte
1
(A − A† )
2
| {z }
(1.84)
anti−hermitiano
Altri operatori importanti sono gli operatori unitari, tali che
U U † = U †U = I
(1.85)
U † = U −1
(1.86)
o, in altri termini,
Il prodotto di operatori unitari è unitario
(U1 U2 )† = U2† U1† = U2−1 U1−1 = (U1 U2 )−1
(1.87)
Inoltre gli operatori unitari conservano il prodotto interno.
È importante osservare che se pensiamo alle colonne di una matrice unitaria n × n
come alle componenti di n vettori, questi formano un set ortonormale. Infatti, partendo
da U † U = I si ha
n
n
n
X
X
X
†
†
∗
δij = hi|I|ji = hi|U U |ji =
hi|U |kihk|U |ji =
(U )ik Ukj =
Uki
Ukj
†
k=1
k=1
17
k=1
(1.88)
Definiamo dei vettori v (i) con componenti
(i)
vk = Uki
segue:
n
X
(1.89)
(i)∗ (j)
vk vk = δij ⇔ hv (i) |v (j) i = δij
(1.90)
k=1
La stessa considerazione si può fare per le n righe.
Possiamo applicare a tutti i vettori di uno spazio vettoriale, V , una trasformazione
unitaria
|vi → U |vi, ∀ |vi ∈ V,
U †U = I
(1.91)
Il prodotto scalare tra due vettori rimane inalterato, mentre gli elementi di matrice di un
determinato operatore A sono trasformati come segue
hv 0 |A|vi ⇒ hU v 0 |A|U vi = hv 0 |U † AU |vi
(1.92)
In questo caso si parla di una trasformazione attiva. Lo stesso risultato, in termini di
elementi di matrice, si otterrebbe lasciando fissi i vettori e ruotando gli operatori con la
trasformazione unitaria U :
A → U † AU
(1.93)
In questo caso si parla di trasformazione passiva. La nomenclatura fa riferimento ai
vettori consueti in cui le trasformazioni attive equivalgono a trasformare i vettori, mentre
vengono lasciati inalterati in una trasformazione passiva. L’opposto accade per gli operatori. I due tipi di trasformazioni sono equivalenti sul piano della fisica, dato che non
cambiano i valori dei prodotti scalari (questo sarà visto meglio nel seguito).
Ci sono delle operazioni che si possono fare sugli operatori e che sono invarianti sotto
trasformazioni unitarie. Per esempio la traccia (somma degli elementi diagonali):
T r[A] =
n
X
Aii
(1.94)
i=1
L’invarianza deriva dalla proprietà fondamentale della traccia
T r[AB] = T r[BA]
(1.95)
Infatti
T r[AB] =
X
Aij Bji =
i,j
X
Bji Aij = T r[BA]
(1.96)
i
Da questa segue la proprietà ciclica della traccia
T r[ABC] = T r[A(BC)] = T r[(BC)A] = T r[B(CA)] = T r[CAB]
(1.97)
Usando quest’ultima si ha
T r[U † AU ] = T r[U U † A] = T r[A]
(1.98)
Anche il determinante è invariante sotto trasformazioni unitarie. Infatti
det|U † AU | = det|U † | det|U | det|A| = det|U † U | det|A| = det|A|
18
(1.99)
1.3.2
Il problema agli autovalori e equazione caratteristica
Discuteremo adesso il problema agli autovalori per un operatore A dato che, come detto
in precedenza, questo problema e’ strettamente collegato all’interpretazione fisica degli
operatori lineari.
Come abbiamo detto, siamo interessati a determinare le direzioni dello spazio vettoriale che non sono cambiate dall’‘azione di un dato operatore A. Queste sono definite
dall’equazione
A|vi = ω|vi
(1.100)
Il vettore |vi è detto un autovettore o un autoket di A (detto anche eigenvector o eigenket)
con autovalore (o eigenvalue) ω. La determinazione degli autovettori e degli autovalori di
un operatore è il problema centrale della meccanica quantistica.
L’equazione agli autovalori per l’operatore A si può riscrivere in componenti:
n
X
(Aij − ωδij )vj = 0
(1.101)
j=1
Questa è una equazione lineare ed omogenea nelle componenti dell’autovettore. Pertanto
si hanno soluzioni non identicamente nulle per le vj se e solo se il determinante del sistema
è nullo
det|A − ωI| = 0
(1.102)
Se espandiamo il determinante si trova una equazione di grado n che determina i possibili
autovalori:
n
X
ck ω k
(1.103)
0 = det|A − ωI| =
k=0
L’equazione risultante è indicata come l’ equazione caratteristica e il polinomio
P (ω) =
n
X
ck ω k
(1.104)
k=1
come il polinomio caratteristico. Chiaramente la forma del polinomio dipende dalla
base che scegliamo per effettuare i calcoli, ma le soluzioni sono indipendenti dalla base,
dal momento che l’equazione originaria non ne dipende.
Dal teorema fondamentale dell’algebra (ogni equazione di grado n ha n radici reali
o complesse) segue che ogni operatore in V n (C) ha n autovalori reali o complessi, non
necessariamente distinti. Una volta trovati gli autovalori, gli autovettori nella data base
si determinano risolvendo l’equazione agli autovalori
X
(Aij − ωδij )vj = 0
(1.105)
j
Quando alcuni degli autovalori coincidono questi si dicono degeneri ed anche l’operatore
e’ detto degenere.
19
D’altra parte non sempre gli autovettori esistono. Esistono però sempre per operatori
hermitiani3 e per operatori unitari.
Gli autovalori degli operatori hermitiani sono reali. Gli operatori hermitiani soddisfano ad un teorema che assicura l’esistenza degli autovettori. Precisamente
Teorema: Per ogni operatore hermitiano esiste almeno una base di autovettori ortogonali. In questa base l’operatore è diagonale (cioè tutti gli elementi di matrice fuori della
diagonale principale sono nulli) ed i suoi autovalori sono gli elementi di matrice diagonali.
Esempio:
Consideriamo l’operatore
0 1
A=
(1.106)
1 0
L’equazione agli autovalori risulta
A|vi = ω|vi ⇒
0 1
1 0
v1
v2
=ω
v1
v2
che possiamo riscrivere nella forma
v1
−ω 1
−ωv1 + v2
=
=0
1 −ω
v2
v1 − ωv2
(1.107)
(1.108)
Il sistema in v1 e v2 e’ lineare ed omogeneo e quindi ha soluzioni solo se il determinante
dei coefficienti si annulla (equazione agli autovalori)
−ω 1
0 = det
= ω2 − 1
(1.109)
1 −ω
Dunque gli autovalori sono ω = ±1. Le due equazioni in v1 e v2 non sono indipendenti, allorche’ ω sia uguale ad uno degli autovalori, ed e’ quindi sufficiente risolvere una
equazione, per esempio la prima
−ωv1 + v2 = 0 ⇒ v2 = ωv1
(1.110)
Dunque:
ω = +1,
ω = −1,
v 2 = v1 ,
v2 = −v1
(1.111)
Si puo’ poi determinare v1 imponendo la condizione di normalizzazone
|v1 |2 + |v2 |2 = 1
(1.112)
e poiche’ |v1 | = |v2 | in entrambi i casi, si ha
|v1 |2 =
3
1
2
(1.113)
Quindi anche per quelli anti-hermitiani, dato che assegnato un operatore A anti-hermitiano,
l’operatore iA è hermitiano
20
e scegliendo v1 reale
1
(1.114)
v1 = √
2
Pertanto i due autovettori, normalizzati ed ortogonali tra loro (controllare!) sono
1
1
1
1
ω = +1 ⇒ √
,
ω = −1 ⇒ √
(1.115)
2 1
2 −1
Teorema: Gli autovalori di un operatore unitario sono numeri complessi di modulo 1,
cioè della forma eiφ . Gli autovettori di un operatore unitario sono mutuamente ortogonali
Un teorema che come vedremo gioca un ruolo fondamentale in meccanica quantistica
è il seguente
Teorema: Se A e B sono operatori hermitiani che commutano tra loro
[A, B] = 0
(1.116)
allora esiste una base di autovettori comuni che li diagonalizza entrambi.
Dimostriamo questo teorema nel caso di operatori non degeneri, ma la dimostrazione
si estende facilmente al caso piu’ generale. Consideriamo gli autovettori di A
A|ai i = ai |ai i
(1.117)
BA|ai i = ai B|ai i
(1.118)
Si ha anche
Ma dato che A e B commutano segue
A(B|ai i) = ai (B|ai i)
(1.119)
Pertanto B|ai i è un autostato di A con autovalore ai . Vista la non degenerazione di A
segue che B|ai i deve essere proporzionale a |ai i
B|ai i = bi |ai i
(1.120)
Quindi |ai i è un autovettore di entrambi gli operatori. La base degli autovettori di A
diagonalizza entrambi gli operatori.
Si dimostra inoltre il
Teorema: Condizione necessaria e sufficiente affinché un operatore sia diagonalizzabile
con una trasformazione unitaria è che valga
[A, A† ] = 0
(1.121)
o, come si dice, che l’operatore A sia normale.
Dato che gli autovettori di un operatore hermitiano, A sono ortogonali e sono in numero
pari alle dimensioni dello spazio vettoriale essi formano un sistema ortonormale e possiamo
quindi ottenere una decomposizione dell’identita’ in termini degli autovettori di A, |ωi i
X
I=
|ωi ihωi |
(1.122)
i
21
In questo caso si parla di decomposizione spettrale. Possiamo anche ottenere una
rappresentazione dell’operatore A in termini dei proiettori sui suoi autostati, Pi = |ωi ihωi |
X
X
ωi |ωi ihωi | = A
|ωi ihωi | = A
(1.123)
i
i
da cui
A=
X
ωi Pi
(1.124)
i
cioe’ la decomposizione spettrale dell’operatore A.
1.3.3
Funzioni di un operatore
La maniera più semplice per definire una funzione di un operatore è quella di considerare
delle funzioni che ammettano uno sviluppo in serie di potenze
f (x) =
∞
X
cn xn
(1.125)
n=0
con x reale o complesso. Definiamo allora una funzione di un operatore A come
f (A) =
∞
X
cn An
(1.126)
n=0
Consideriamo ora un operatore A(λ) dipendente da un parametro λ. Definiamo la
derivata dell’operatore rispetto al parametro il limite
A(λ + ∆λ) − A(λ)
dA(λ)
= lim
∆λ→0
dλ
∆λ
1.4
(1.127)
Applicazione allo spin dell’elettrone
Abbiamo visto gli stati possibili per lo spin di un elettrone sono due, corrispondenti ai
/ /2. Dunque e’ possibile definire una variabile dinamica associata
due valori misurati ±h
allo spin, con autostati |±i. E’ conveniente identificare i risultati della misura con i valori
~ orientato lungo l’asse z.
±1, o semplicemente con ±. Iniziamo considerando il campo B
/ ).
Identificheremo l’osservabile di spin lungo l’asse z con σz (lo spin moltiplicato per 2/h
Gli autostati di σz e gli autovalori saranno dunque
σz |+i = +|+i,
σz |−i = −|−i
(1.128)
L’operatore σz nella base dei suoi autostati e’ diagonale con autovalori ±1. Dunque
1 0
σz =
(1.129)
0 −1
22
Lo spazio vettoriale con il quale lavoreremo sara’ dunque quello dei vettori complessi a
due dimensioni, con vettori ket
a1
|ai ↔
(1.130)
a2
e corrispondenti bra
a∗1 a∗2
ha| =
(1.131)
Il prodotto scalare e’ dato da
ha|bi = a∗1 b1 + a∗2 b2
(1.132)
ha|ai = |a1 |2 + |a2 |2
(1.133)
e la norma quadrata e’
Nella base degli autostati di σz abbiamo
1
,
|+i ↔
0
|−i ↔
0
1
(1.134)
Dunque la decomposizione di un generico vettore su questa base e’ data da
|ai = a1 |+i + a2 |−i
(1.135)
In base alla interpretazione probabilistica che abbiamo dato, se lo stato di spin e’ |ai e lo
si misura con l’apparato sopra descritto allineato lungo l’asse z, avremo che le probabilita’
per trovare lo spin parallelo o antiparallelo all’asse z sono
P (σz = +1) = |a1 |2 ,
P (σz = −1) = |a2 |2
(1.136)
Ovviamente dovremo aver normalizzato lo stato |ai e dunque
|a1 |2 + |a2 |2 = 1 ⇒ P (σz = +1) + P (σz = −1) = 1
(1.137)
Consideriamo adesso l’operatore di spin lungo l’asse x. Normalizzando sempre con
/ si ha (vedremo in seguito che questa matrice e’ proporzionale proprio alla
il fattore 2/h
componente lungo l’asse x del momento angolare intrinseco, o spin, per una particella di
spin 1/2)
0 1
σx =
(1.138)
1 0
Dato che σx2 = 1 si vede subito che i possibili autovalori sono ancora ±1. Per capirlo basta
osservare che ogni equazione operatoriale che dipenda da un operatore A e’ invariante
sotto la trasformazione
A0 = U AU −1
(1.139)
infatti, per ogni potenza di A si ha
U An U −1 = U AU −1 U AU −1 · · · U AU −1 = (U AU −1 )n
23
(1.140)
Quindi il trasformato di una potenza e’ uguale alla stessa potenza dei trasformati. Pertanto, dato che σx e’ hermitiana e si puo’ diagonalizzare con una trasformazione unitaria,
l’equazione σx2 = 1 vale anche per la matrice diagonalizzata e dunque i suoi autovalori
devono essere uguali a ±1. Inoltre la traccia di una matrice e’ invariante per trasformazioni unitarie e quindi anche σx diagonalizzata deve avere traccia nulla. Segue che i due
autovalori devono essere +1 e −1. Per trovare gli autovettori avremo
0 1
v1
v1
σx |σx = +1i = |σx = +1i ↔
=
(1.141)
1 0
v2
v2
Da cui segue l’equazione
v1 = v2
(1.142)
2|v1 |2 = 1
(1.143)
La normalizzazione richiede
e scegliendo v1 reale segue che l’autostato normalizzato e’
1
1
|σx = +1i = √ (|+i + |−i) ↔ √
2
2
1
1
1
−1
(1.144)
In modo del tutto analogo si dimostra che
1
1
|σx = −1i √ (|+i − |−i) ↔ √
2
2
(1.145)
Si verifica subito che questi due stati sono ortogonali tra loro. Supponiamo adesso di preparare uno stato corrispondente all’autovalore +1 di σx e di voler conoscere la probabilita’
di trovarlo orientato lungo l’asse z. Dunque lo stato iniziale e’
|ψi = |σx = +1i
(1.146)
e si chiede la probabilita’ di trovare lo spin nello stato
|σz = +1i
(1.147)
Questa probabilita’ e’ data dal modulo quadro del coefficiente di |+i nella decomposizione
di |σx = +1i
2
1
1
1 2
=
(1.148)
P (σz = +1) = |hσz = +1|σx = +1i| = 1 0 √
2
2 1
In modo analogo si ha
2
1
1
1 P (σz = −1) = |hσz = −1|σx = +1i| = 0 1 √
=
2
2 1
2
(1.149)
Nello stesso modo possiamo considerare lo spin lungo l’asse y che risulta corrispondere
all’operatore
0 −i
σy =
(1.150)
i 0
24
’ Anche questo operatore ha autovalori ±1 e’ hermitiano ed suoi autostati sono
1
1
1
1
|σy = +1i ↔ √
, |σy = −1i ↔ √
i
2
2 −i
(1.151)
Si verifica che anche in questo caso i due autostati sono ortogonali. Se poi prepariamo lo
stato come autostato di σy e chiediamo ancora la probabilita’ di trovare lo spin parallelo
o antiparallelo all’asse z, dovremo calcolare
2
1
1
1 P (σz = +1) = |hσz = −1|σx = +1i| = 1 0 √
=
i
2
2
(1.152)
2
1
1
=1
P (σz = −1) = |hσz = −1|σy = +1i| = 0 1 √
2
2 −i (1.153)
2
e
2
Dunque se lo spin e’ preparato a 900 rispetto all’asse z, la probabilita’ di osservarlo parallelo
o antiparallelo a questo asse e’ sempre 1/2.
Notiamo che i tre operatori σx,y,z non hanno autovettori comuni e quindi non commutano tra loro. Infatti
[σx , σy ] = 2iσz ,
[σy , σz ] = 2iσx ,
[σz , σx ] = 2iσy
(1.154)
La situazione piu’ generale e’ quando si prepara lo spin in una direzione ~n (|~n|2 = 1)
nel nostro riferimento. In questo caso l’operatore di spin e’ dato da
nz
nx − iny
nz n−
~σ · ~n = σx nx + σy ny + σz nz =
≡
(1.155)
nx + iny
−nz
n+ −nz
dove abbiamo definito
n− = nx − iny ,
n+ = n∗−
(1.156)
Dato che ~n e’ un versore segue
n2z + n+ n− = 1
(1.157)
Usando questa ultima relazione e’ facile dimostrare che
(~σ · ~n)2 = 1
(1.158)
da cui segue che anche gli autovalori di (~σ · ~n)2 sono ±1. Per l’autovettore corrispondente
all’autovalore +1 di ~σ · ~n si ha l’equazione
nz n−
α
α
=
(1.159)
n+ −nz
β
β
che da’ luogo alle due equazioni omogenee
nz α + n− β = α,
25
n + α − nz β = β
(1.160)
Dalla prima si ha
β
1 − nz
=
α
n−
(1.161)
e dunque l’autovettore sara’, a meno di un fattore di normalizzazione N ,
1
|~σ · ~n = +1i ↔ N 1 − nz
n−
(1.162)
Normalizzando si ha
(1 − nz )2
2
|N | 1 +
= |N |2
=1
n+ n−
1 + nz
2
(1.163)
e quindi
r
|~σ · ~n = +1i ↔
1
1 + nz
1 − nz
2
n−
(1.164)
In modo del tutto analogo si trova
r
|~σ · ~n = −1i ↔
1
1 + nz
1 + nz
−
2
n−
(1.165)
Si verifica facilmente che questi due vettori sono ortogonali.
Supponiamo adesso di preparare lo stato con lo spin diretto lungo l’asse ~n e di voler
determinare la probabilita’ di osservarlo diretto lumgo l’asse m,
~ con m
~ un versore. Dato
che il problema dipende solo dai due versore m
~ e ~n il risultato finale puo’ dipendere solo
dall’angolo θ tra i due versori, cioe’ da ~n · m
~ = cos θ. Questo risultato si puo’ ottenere
sia osservando che la probabilita’ non puo’ dipendere dalla nostra scelta del sistema di
coordinate e si puo’ dunque prendere ~n diretto lungo l’asse z. In questo caso
1
|~σ · ~n = +1i ↔
(1.166)
0
e dunque
P (~σ · m = +1) = |h~σ · m
~ = +1|~σ · ~n = +1i|2 =
1 + mz
1 + cos θ
=
2
2
(1.167)
Oppure per calcolo diretto, usando la (1.164), si dimostra che
P (~σ · m = +1) = |h~σ · m
~ = +1|~σ · ~n = +1i|2 =
1+m
~ · ~n
2
(1.168)
Notiamo che non e’ possibile misurare ~σ · ~n e ~σ · m,
~ con m
~ 6= ~n. Basta pensare, per
esempio, a σx e σy che non hanno autovettori comuni. Questa affermazione e’ correlata al
fatto che le σi non commutano tra loro. Infatti si puo’ verificare esplicitamente che
[σx , σy ] = 2iσz ,
[σy , σz ] = 2iσx ,
26
[σz , σx ] = 2iσy
(1.169)
Dunque nessuna di queste matrici commuta con le altre ed in particolare anche
[~σ · ~n, ~σ · m]
~ 6= 0, se ~n 6= m
~
(1.170)
Una proprieta’ interessante dell’operatore ~σ · ~n e’ che, dato uno stato normalizzato
(α, β), esiste sempre un versore ~n tale che
α
α
~σ · ~n
=
(1.171)
β
β
La dimostrazione e’ semplice perche’ basta risolvere le due equazioni non omogenee per le
componenti di ~n che seguono dalla precedente, e cioe’
nz n−
α
α
=
(1.172)
n+ −nz
β
β
ovvero
nz α + n− β = α, n+ α − nz β = β
(1.173)
Prendendo la complessa coniugata della seconda si ricava n− in termini di nz
n− α∗ = (nz + 1)β ∗
(1.174)
Sostituendo nella prima si ha
nz α +
nz + 1 2
|β| = α
α∗
(1.175)
Usando la condizione di normalizzazione |α|2 + |β|2 = 1 si trova
nz = |α|2 − |β|2
(1.176)
Sostituendo nella prima delle (1.173) segue
n− = 2αβ ∗ ,
n+ = 2α∗ β
(1.177)
Dato che il vettore (α, β) e’ definito a meno di un fattore di fase comune, possiamo sempre
scegliere per i parametri α e β le espressioni
α = cos θe−iφ ,
β = sin θe+iφ
(1.178)
In questo modo la condizione di romalizzazione e’ automaticamente soddisfatta. Inoltre
si ha
nz = cos2 θ − sin2 θ = cos 2θ
(1.179)
n− = 2 sin θ cos θe−2iφ = sin 2θe2iφ ,
n+ = sin 2θe+2iφ
(1.180)
da cui
nx = sin 2θ cos 2φ,
ny = sin 2θ sin 2φ
(1.181)
Se il versore ~n e’ assegnato in coordinate polari (θ̂, φ̂) si ha
~n = (sin θ̂ cos φ̂, sin θ̂ sin φ̂, cos θ̂)
(1.182)
θ = θ̂/2, φ = φ̂/2
(1.183)
Dunque vale
27
1.5
Spazi vettoriali infinito-dimensionali
In meccanica quantistica hanno interesse gli spazi vettoriali infinito-dimensionali. Cercheremo qui di introdurre i concetti di base in maniera intuitiva e non rigorosa. Per un
maggior approfondimento si rimanda ai testi di Analisi Funzionale.
Partiamo dall’idea che una funzione assegnata può essere pensata come un vettore in
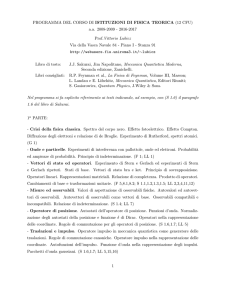
uno spazio infinito-dimensionale. A questo scopo consideriamo una funzione f (x) definita
su un intervallo chiuso 0 ≤ x ≤ L (vedi Figura 1.5). Questa potrebbe rappresentare, ad
esempio, lo spostamento di una corda fissata agli estremi 0 ed L. Possiamo campionare
questa funzione dividendo l’intervallo [0, L] in N + 1 parti ed assegnando i valori di f (x)
negli N punti di divisione (vedi Figura 1.6)
xi = i
L
,
N +1
i = 1, · · · , N
(1.184)
f(x)
0
L
x
Figura 1.5: La funzione f (x) definita sull’intervallo [0, L].
Possiamo pensare ai valori che assume la funzione in questi N punti come a un vettore
in V N (R):
f (x1 )
f (x2 )
·
(1.185)
|fN i ⇔
·
f (xN −1 )
f (xN )
Identificheremo i vettori base come ket denotati con xi , le coordinate del punto in cui
campioniamo la f (x), e avremo
0
·
|xi i ⇔
(1.186)
1
·
0
28
f(x)
0
x 1x 2 x3
xN-1x N
L x
Figura 1.6: Il campionamento della funzione f (x) data in Figura 1.5.
I vettori base corrispondono ad una funzione che vale 1 in xi e zero negli altri punti.
Chiaramente si hanno le relazioni
N
X
hxi |xj i = δij ,
|xi ihxi | = I
(1.187)
i=1
Cioè questi vettori formano un sistema di vettori ortonormali. Immaginiamo adesso uno
spazio N dimensionale con ogni direzione individuata da un vettore unitario |xi i. Allora
il vettore fN , che rappresenta la campionatura di f (x), sarà quel vettore che ha per
componente f (xi ) lungo l’asse |xi i
|fN i =
N
X
f (xi )|xi i
(1.188)
i=1
Occorre naturalmente dimostrare che stiamo effettivamente costruendo uno spazio vettoriale. Infatti possiamo definire una struttura lineare sulle funzioni definite nell’intervallo
[0, L], introducendo la somma di funzioni e la moltiplicazione per uno scalare. Consideriamo allora le funzioni definite nell’intervallo [0, L] tali che f (0) = f (L) = 0. Si definiscono
l’addizione ed il prodotto per uno scalare come segue:
(f + g)(x) = f (x) + g(x),
(αf )(x) = αf (x)
(1.189)
Si verifica immediatamente che tutte le proprietà che definiscono uno spazio vettoriale
sono soddisfatte. Inoltre, dato che le definizione sopra date valgono punto per punto, è
chiaro che anche le funzioni campionate soddisfano le condizioni di spazio vettoriale. In
particolare
(f + g)(x1 )
f (x1 )
g(x1 )
· ·
·
= · + ·
·
|(f + g)N i = |fN i + |gN i ⇔
(1.190)
·
·
·
(f + g)(xN )
f (xN )
g(xN )
29
e
f (x1 )
(αf )(x1 )
·
·
= α ·
·
|(αf )N i = α|fN i ⇔
·
·
f (xN )
(αf )(xN )
(1.191)
Possiamo anche definire un prodotto interno come
hfN |gN i =
N
X
f (xi )∗ g(xi )
(1.192)
i=1
In particolare |fN i e |gN i sono detti vettori ortogonali se
hfN |gN i = 0
(1.193)
Vogliamo adesso vedere cosa succede quando mandiamo N all’infinito, in modo che il
nostro campionamento riproduca esattamente la funzione originale. Il ket corrispondente
|fN i → |f∞ i ≡ |f i
(1.194)
è un vettore in uno spazio infinito-dimensionale (per di più continuo, cioè non numerabile).
Ovviamente le proprietà di spazio vettoriale non vengono alterate dal limite, dato che
queste sono definite tramite le equazioni (1.189). Le cose sono però diverse con il prodotto
scalare. Consideriamo la norma di un vettore per N finito
hfN |fN i =
N
X
|f (xi )|2
(1.195)
i=1
Nel limite N → ∞ la somma precedente diverge in pratica per qualunque funzione. D’altra
parte non è difficile alterare la definizione di prodotto interno in modo da avere somme
convergenti. Una scelta possibile (ma non l’unica) è, per esempio
hfN |gN i =
N
X
f (xi )∗ g(xi )∆N
(1.196)
i=1
con
L
N +1
Nel limite N → ∞ si ottiene la definizione consueta di integrale
Z L
hf |gi =
f (x)∗ g(x)dx
∆N =
(1.197)
(1.198)
0
Si vede facilmente che questa definizione soddisfa tutte le proprietà che definiscono in
generale il prodotto interno. Ovviamente è possibile definire il prodotto interno anche in
altro modo. Infatti più in generale, se introduciamo la misura
dµ(x) = ρ(x)dx
30
(1.199)
con ρ(x) definita positiva, la seguente espressione soddisfa le condizioni per definire un
prodotto interno
Z L
f ∗ (x)g(x)dµ(x)
(1.200)
hf |gi =
0
Se le funzioni sono definite in un intervallo generico [a, b] la forma più generale è
Z
hf |gi =
b
f ∗ (x)g(x)dµ(x)
(1.201)
a
Dobbiamo vedere adesso come normalizzare i vettori di base. In ogni punto x dell’intervallo
in esame, avremo un autoket |xi tale che per ogni x0 6= x
hx|x0 i = 0,
x 6= x0
(1.202)
D’altra parte, dato che nel passaggio dal discreto al continuo abbiamo cambiato la definizione di prodotto scalare non potremo avere hx|xi = 1. Per capire cosa succede
consideriamo la relazione di completezza che vorremmo della forma
Z b
|x0 ihx0 |dx0 = I
(1.203)
a
Da questa segue
Z
b
hx|x0 ihx0 |f idx0 = hx|I|f i = f (x)
(1.204)
a
Pertanto si dovrà avere
b
Z
hx|x0 if (x0 )dx0 = f (x)
(1.205)
a
Definiamo
hx|x0 i = δ(x, x0 )
(1.206)
con
δ(x, x0 ) = 0,
Integrando nell’intorno di x avremo
Z x+
x 6= x0
δ(x, x0 )f (x0 )dx0 = f (x)
(1.207)
(1.208)
x−
Nella regione di integrazione possiamo approssimare f (x0 ) con f (x) e quindi segue
Z x+
δ(x, x0 )dx0 = 1
(1.209)
x−
Vediamo che δ(x, x) non può avere un valore finito dato che il suo integrale su un intervallo
infinitesimo è finito. Inoltre il valore di δ(x, x0 ) dipende solo dal fatto che x − x0 sia nullo
oppure diverso da zero. Pertanto dovremo avere
δ(x, x0 ) = δ(x − x0 )
31
(1.210)
Le proprietà di δ(x − x0 ) sono dunque
0
δ(x − x ) = 0,
b
Z
0
δ(x − x0 )dx0 = 1,
x 6= x ,
a≤x≤b
(1.211)
a
La funzione δ(x)4 è nota come la delta di Dirac. Sebbene non la si possa considerare
come una funzione, è però definibile come il limite di una sequenza di funzioni. A titolo
esemplificativo consideriamo la famiglia di Gaussiane (vedi la Figura 1.7)
g∆ (x − x0 ) = √
1
π∆2
(x − x0 )2
∆2
e
−
(1.212)
g(x-x')
∆
1
π1/2∆
21/2∆
x
x'
Figura 1.7: La famiglia di gaussiane che definisce come limite la delta di Dirac.
Queste funzioni diventano sempre più alte e più strette man mano che ∆ → 0. D’altra
parte l’integrale rimane sempre uguale ad uno. Infatti, consideriamo l’integrale di una
gaussiana:
Z +∞
2
I(α) =
e−αx dx
(1.213)
−∞
Si ha
Z
2
+∞
I (α) =
2
e−αx dx
−∞
Z
∞ Z 2π
=
0
+∞
Z
2
e−αy dy =
−∞
2
ρdρdφe−αρ = 2π
0
da cui
Z
+∞
I(α) =
+∞
2
2
e−α(x + y ) dxdy =
−∞
Z
0
Z
∞
1 2 −αρ
dρ e
=π
2
2
e−αx dx =
−∞
4
2
r
π
α
Z
0
∞
π
dye−αy =
α
(1.214)
(1.215)
La δ(x) risulta ben definita da un punto di vista matematico solo nell’ambito della teoria delle
distribuzioni, che non sono funzioni nel senso classico, ma funzionali lineari.
32
Usando queste formula si verifica immediatamente che
Z +∞
g∆ (x − x0 )dx0 = 1
(1.216)
−∞
Vediamo anche che per ∆ → 0, la funzione g∆ (x − x0 ) tende ad essere sempre più piccola
nei punti x 6= x0 . Pertanto in questo limite si ha
lim g∆ (x − x0 ) = δ(x − x0 )
∆→0
(1.217)
In generale si definisce una serie di funzioni, f (x) come δ-convergenti se nel limite in cui
→ 0 succede che
n0 se x6=0
(1.218)
lim f (x) =
→0
∞ se x=0
e contemporaneamente
Z
lim
f (x)dx = 1
→0
(1.219)
In questo caso si ha
lim f (x) = δ(x)
(1.220)
→0
Dunque la successione di gaussiane che abbiamo considerato e’ δ-convergente. I matematici hanno dato una forma rispettabile alla delta di Dirac nell’ambito della teoria delle
distribuzioni. le distribuzioni sono funzioni generalizzate che si definiscono tramite le loro
proprietà di integrazione con classi di funzioni con opportune proprietà.
1.5.1
Operatori in dimensioni infinite
Dato che abbiamo definito i ket in corrispondenza biunivoca con le funzioni, un operatore
su questi spazi mappa una funzione f in un’altra funzione f˜
A|f i = |f˜i
(1.221)
Per esempio, consideriamo l’operatore derivata:
d
df (x)
: f (x) →
dx
dx
(1.222)
Nello spazio infinito-dimensionale che abbiamo costruito, indicando con D l’operatore
corrispondente avremo
D|f i = |df /dxi
(1.223)
Cioè D mappa una funzione nella sua derivata. Calcoliamo l’espressione
hx|D|f i = hx|df /dxi =
df (x)
dx
(1.224)
da cui, inserendo la completezza, si ottengono gli elementi di matrice di D tra i vettori di
base
Z
Z
df (x)
0
0
0
hx|D|x ihx |f idx = hx|D|x0 if (x0 )dx0 =
(1.225)
dx
33
Vediamo cosi che
d
δ(x − x0 )
dx
Siamo ora in grado di valutare le proprietà di hermiticità di D. Si ha dunque
hx|D|x0 i =
Dx,x0 = δ 0 (x − x0 )
(1.226)
(1.227)
da cui (l’apice indica sempre la derivata rispetto al primo argomento)
Dx∗0 ,x = δ 0 (x0 − x)∗ = δ 0 (x0 − x) = −δ 0 (x − x0 )
(1.228)
Vediamo che l’operatore D è antihermitiano
D† = −D
(1.229)
Possiamo dunque definire un operatore hermitiano
K = −iD
(1.230)
L’analisi fin qui fatta è formale. Dato che si ha a che fare con distribuzioni, tutte le proprietà andrebbero controllate sotto segno di integrale. Consideriamo dunque un generico
elemento di matrice di K, hg|K|f i. Affinché K sia hermitiano dobbiamo avere
hg|K|f i = hg|Kf i = hKf |gi∗ = hf |K † |gi∗ = hf |K|gi∗
(1.231)
hg|K|f i = hf |K|gi∗
(1.232)
cioè
Questa relazione si può riscrivere usando la completezza:
Z
Z
hg|K|f i =
dxdx0 hg|xihx|K|x0 ihx0 |f i = dxdx0 g ∗ (x)Kx,x0 f (x0 ) =
Z
dδ(x − x0 )
f (x0 ) =
=
dxdx0 g ∗ (x)(−i)
dx
Z
df (x)
=
dxg ∗ (x)(−i)
dx
(1.233)
D’altra parte
hf |K|gi∗ =
Z
Z
= i
dxf ∗ (x)(−i)
dg(x)
dx
∗
dg ∗ (x)
dx
f (x) = −i
dx
=
Z
dxg ∗ (x)
= hg|K|f i + i [g ∗ (x)f (x)]ba
df (x)
+ i [g ∗ (x)f (x)]ba =
dx
(1.234)
Dunque K è hermitiano se e solo se l’espressione
[g ∗ (x)f (x)]ba
34
(1.235)
è nulla. Dunque l’hermiticità dell’operatore K dipende dalla classe di funzioni sulla quale
è definito. Per esempio, se si ha a che fare con funzioni che si annullano agli estremi
dell’intervallo di definizione, K è hermitiano. Analogamente si ha hermiticità nel caso di
funzioni periodiche, f (a) = f (b). Nel seguito saremo interessati a funzioni definite in un
intervallo infinito (−∞, +∞). Ovviamente se si ha a che fare con funzioni che si annullano
all’infinito avremo hermiticità. Spesso però avremo a che fare con funzioni oscillanti, del
tipo eikx . Poniamoci adesso il problema agli autovalori:
K|ki = k|ki
(1.236)
hx|K|ki = khx|ki
(1.237)
ψk (x) = hx|ki
(1.238)
Passando alla base |xi si ha
Definendo
segue
Z
0
0
Z
0
hx|K|x ihx |kidx = −i
δ 0 (x − x0 )ψk (x0 )dx0 = −i
dψk (x)
dx
(1.239)
Dobbiamo dunque risolvere
dψk (x)
= kψk (x)
dx
(1.240)
ψk (x) = Aeikx
(1.241)
−i
La soluzione generale è
dove A è una costante di normalizzazione. Ogni valore di k produce un autovalore, d’altra
parte K deve essere hermitiano anche sui suoi autovettori. Ma per k complesso, k =
k1 + ik2 , le soluzioni divergono in uno dei due limiti e quindi dobbiamo restringerci a k
reale. Una normalizzazione conveniente è quella che produce autovettori ortonormali (nel
senso del continuo)
hk|k 0 i = δ(k − k 0 )
(1.242)
Si ha
0
Z
Z
hk|xihx|k idx = ψk∗ (x)ψk0 (x)dx =
Z
0
2
= |A|
e−i(k − k )x dx = (2π)|A|2 δ(k − k 0 )
hk|k i =
0
(1.243)
dove abbiamo fatto uso della equazione (??). Dunque scegliendo A reale si ha
Pertanto
1
A= √
2π
(1.244)
1
hx|ki = ψk (x) = √ eikx
2π
(1.245)
35
Si verifica facilmente che gli autovettori di K costituiscono un set ortonormale (nel senso
del continuo). Infatti
Z
Z
0
1
0
dkhx|kihk|x i =
dkeik(x − x ) = δ(x − x0 )
(1.246)
2π
da cui
Z
|kihk|dk = I
(1.247)
Assumeremo che anche nel continuo gli autovettori di un operatore hermitiano
costituiscano un set ortonormale. Nel caso in esame funzioni che si espandono nella
base |xi con componenti f (x) = hx|f i si potranno espandere anche nella base |ki. Infatti
si ha
Z
Z
1
f (k) = hk|f i = hk|xihx|f idx = √
e−ikx f (x)dx
(1.248)
2π
e viceversa
Z
Z
1
eikx f (k)dk
(1.249)
f (x) = hx|f i = hx|kihk|f idk = √
2π
Si ritrovano per questa via le formule dell’espansione di Fourier. Nella base |ki gli elementi
di matrice di K sono ovviamente banali
hk|K|k 0 i = k 0 hk|k 0 i = k 0 δ(k − k 0 )
(1.250)
Visto che la base |ki è data dagli autovettori di K ci possiamo chiedere se i vettori |xi
sono autovettori di un qualche operatore. Questo operatore può essere appunto definito
in termini dei suoi autovettori dalla relazione
X|xi = x|xi
(1.251)
hx0 |X|xi = xδ(x − x0 )
(1.252)
con elementi di matrice
È interessante calcolare l’azione di X sulle funzioni
X|f i = |f˜i
(1.253)
Si ha
Z
hx|X|f i =
0
0
0
hx|X|x ihx |f idx =
Z
x0 δ(x − x0 )f (x0 )dx0 = xf (x)
(1.254)
Pertanto
f˜(x) = xf (x)
(1.255)
X|f i = |xf i
(1.256)
e
Esiste una interessante relazione tra gli operatori X, che equivale a moltiplicare una funzione per il valore di x, cioè il valore della coordinata alla quale è calcolata, e l’operatore K,
36
l’operatore di differenziazione rispetto a x. Questa relazione si può trovare considerando
gli elementi di matrice di X tra autostati di K
Z
Z
0
0
d
1
d
1
−ikx
ik
x
i(k
−
k)x
0
e
xe
dx = i
e
dx = i δ(k − k 0 ) (1.257)
hk|X|k i =
2π
dk 2π
dk
Pertanto
dg(k)
(1.258)
dk
Gli operatori X e K vengono detti operatori coniugati ed in particolare hanno la
proprietà di non commutare. Infatti, da
hk|X|gi = i
X|f i ⇔ xf (x),
K|f i ⇔ −i
df (x)
dx
(1.259)
segue
d
f (x)
dx
(1.260)
d
d
(xf (x)) = −if (x) − ix f (x)
dx
dx
(1.261)
XK|f i ⇔ −ix
e
KX|f i ⇔ −i
Pertanto
[X, K]|f i ⇔ if (x) ⇔ iI|f i
(1.262)
[X, K] = iI
(1.263)
o
Lo spazio delle funzioni normalizzabili alla delta di Dirac è anche chiamato lo spazio di
Hilbert fisico.
37
Capitolo 2
I postulati della meccanica
quantistica
Introdurremo adesso i postulati della meccanica quantistica seguendo quella che viene
chiamata l’interpretazione di Copenhagen. Come discuteremo, il principale difetto di
questa impostazione e’ che gli effetti di un apparato di misura sulle osservabili vengono
postulati assumendo che l’apparato di misura sia classico e quindi, in qualche modo, esca
dalla descrizione quantistica. E’ subito evidente la difficolta’ di una simile supposizione.
Infatti, ogni apparato macroscopico e’ costituito da entita’ microscopiche, atomi e loro
costituenti, e quindi, in linea di principio, dovrebbe essere riconducibile ad una descrizione
quantistica. Cio’ nonostante l’interpretazione di Copenhagen fornisce un quadro molto
coerente dei dati sperimentali e fino ad oggi non e’ mai stata smentita. Piu’ avanti nel
corso discuteremo il problema della misura in maniera piu’ approfondita.
Inizieremo considerando un sistema costituito da un singolo grado di libertà, una
particella in una dimensione spaziale. Descriveremo ora i postulati della meccanica quantistica per un tale sistema mettendoli a raffronto con gli analoghi postulati della meccanica
classica.
Come vedremo, questi postulati si basano sulle considerazioni iniziali relative allo spazio delle fasi ed alle variabili dinamiche in Meccanica Quantistica.
Meccanica Classica
Meccanica Quantistica
1) Lo stato di una sistema ad ogni
istante è specificato assegnando un punto
P nello spazio delle fasi.
1) Lo stato di un sistema è specificato da
un vettore |ψ(t)i in uno spazio di Hilbert
(spazio delle fasi quantistico).
2) Ogni variabile dinamica, ω, è una
funzione sullo spazio delle fasi, ω = ω(P ).
2) Una variabile dinamica (o osservabile),
Ω, è un operatore hermitiano sullo
spazio di Hilbert in esame.
38
3) Se il sistema è nello stato |ψ(t)i, la
misura della variabile corrispondente a Ω
darà uno degli autovalori ω di Ω con
probabilità P (ω) ∝ |hω|ψi|2 . Dopo la
misura il sistema viene proiettato nello
stato |ωi corrispondente all’autovalore ω.
4) Il vettore di stato evolve in accordo alla
equazione di Schrödinger:
∂
/ |ψ(t)i = H|ψ(t)i
ih
∂t
dove H è un operatore hermitiano detto
operatore hamiltoniano.
3) Se il sistema è nello stato determinato
dal punto P , la misura di ω darà il valore
ω(P ). Lo stato del sistema rimane
inalterato dopo la misura.
4) Le variabili di stato evolvono secondo
le equazioni di Hamilton:
dω
∂ω
=
+ {ω, H}
dt
∂t
Quando si ha a che fare con un sistema specifico, i postulati 2) e 3) vengono ulteriormente specificati. Per esempio, se si considera un punto materiale che si muova lungo una
retta, il suo spazio delle fasi è descritto dalle variabili di posizione e di impulso (x, p) e i
postulati 2) e 3) diventano:
Meccanica Classica
(particella unidimensionale)
2) Ogni variabile dinamica, ω, è una
funzione di x e p, ω = ω(x, p)
4) Le variabili di stato evolvono secondo le equazioni di Hamilton:
∂H
∂H
ẋ =
, ṗ = −
∂p
∂x
Meccanica Quantistica
2) Le variabili x e p della meccanica classica
sono rappresentate da operatori hermitiani
X and P con i seguenti elementi di matrice
hx|X|x0 i = xδ(x − x0 )
d
/ δ(x − x0 )
hx|P |x0 i = −ih
dx
Gli operatori hermitiani che corrispondono
alle variabili classiche ω(x, p) si ottengono
tramite la sostituzione
Ω(X, P ) = ω(x → X, p → P )
4) Il vettore di stato evolve in accordo alla
equazione di Schrödinger:
∂
/ |ψ(t)i = H|ψ(t)i
ih
∂t
dove H(X, P ) = H(x → X, p → P ) è
l’hamiltoniana quantistica, ottenuta dalla
hamiltoniana classica, seguendo il
postulato 2).
39
Notiamo che per entrambi i casi i primi tre postulati fanno riferimento al sistema a un
dato istante, mentre il quarto specifica la variazione dello stato con il tempo.
Iniziamo con l’osservare che mentre il sistema classico è descritto da un punto nello
spazio delle fasi, e quindi, in genere, da un numero finito di gradi di libertà (per esempio
due gradi di libertà x e p nel caso della particella in una dimensione), il sistema quantistico
è specificato da un vettore di stato |ψ(t)i che, generalmente, è un vettore in uno spazio
di Hilbert infinito-dimensionale. L’interpretazione fisica del vettore di stato è fornita dai
postulati 2) e 3). Abbiamo detto che assegnato lo stato (o il punto nello spazio delle fasi),
in meccanica classica ogni osservabile ω è univocamente assegnata dal suo valore ω(P ).
Viceversa in meccanica quantistica, allorché sia assegnato lo stato, per misurare una osservabile Ω dobbiamo effettuare le seguenti operazioni:
1) - Costruire l’operatore hermitiano Ω corrispondente alla variabile dinamica ω tramite
la regola di corrispondenza (o, comunque postulare le proprieta’ dell’operatore se non
si ha un corrispondente classico), per esempio per la particella
Ω = ω(x → X, p → P )
(2.1)
2) - Determinare gli autovettori |ωi i e gli autovalori ωi di Ω.
3) - Espandere il vettore di stato nella base degli autovettori di Ω
X
|ψi =
|ωi ihωi |ψi
(2.2)
i
4) - La probabilità P (ωi ) di ottenere come risultato della misura l’autovalore ωi è
P (ωi ) ∝ |hωi |ψi|2
(2.3)
Questo risultato si può anche esprimere usando il proiettore Pωi = |ωi ihωi |
P (ωi ) ∝ hψ|ωi ihωi |ψi = hψ|Pωi |ψi = hψ|Pωi Pωi |ψi = hPωi ψ|Pωi ψi
(2.4)
ovvero, la probabilità è la norma quadrata della proiezione del vettore di stato sull’autovettore corrispondente all’autovalore misurato.
Possiamo fare alcune osservazioni:
i) - La teoria fa solo predizioni probabilistiche per i risultati di una misura. Inoltre i
soli possibili risultati della misura di una osservabile Ω sono i suoi autovalori.
Se la quantita’ che si misura corrisponde a un operatore hermitiano i risultati della misura
sono reali.
40
ii) - Dato che P (ωi ) ∝ |hωi |ψi|2 , |hωi |ψi|2 è solo una probabilità relativa. Per avere la
probabilità assoluta occorre dividere per tutti i risultati possibili
|hωi |ψi|2
|hωi |ψi|2
|hωi |ψi|2
P
P (ωi ) = P
=
=
2
hψ|ψi
j |hωj |ψi|
j hψ|ωj ihωj |ψi
(2.5)
Quindi se normalizziamo lo stato |ψi
|ψ 0 i =
|ψi
] → hψ 0 |ψ 0 i = 1
[hψ|ψi]1/2
(2.6)
P (ωi ) = |hωi |ψ 0 i|2
(2.7)
si ha
Questo risultato vale solo per stati normalizzabili. Il caso di vettori normalizzati alla delta
di Dirac verrà riesaminato in seguito. Ovviamente due stati paralleli |ψi e α|ψi danno
luogo alla stessa distribuzione di probabilità. Pertanto a uno stato fisico non è realmente
associato un vettore nello spazio di Hilbert ma piuttosto una direzione o un raggio. Quindi quando si parla di stato di una particella si intende tipicamente uno stato normalizzato
hψ|ψi = 1. Anche con questa ulteriore restrizione lo stato |ψi non è univocamente fissato
dato che se |ψi è normalizzato, anche eiθ |ψi lo è e dà la stessa distribuzione di probabilità
di |ψi. A volte questa libertà viene usata per scegliere le componenti di |ψi reali in una
data base.
iii) - Nel caso in cui lo stato |ψi coincida con un autovettore, o autostato |ωi i dell’operatore Ω, il risultato della misura di Ω sarà certamente ωi .
iv) - Nel caso in cui lo stato |ψi sia una sovrapposizione di due autostati di Ω:
|ψi =
avremo
P (ω1 ) =
α|ω1 i + β|ω2 i
(|α|2 + |β|2 )1/2
|α|2
,
|α|2 + |β|2
P (ω2 ) =
(2.8)
|β|2
|α|2 + |β|2
(2.9)
v) - Se vogliamo informazioni relativamente a un’altra osservabile Λ, occorre ripetere tutto
il procedimento visto sopra. Cioè trovare autovalori ed autovettori di Λ, da cui
P (Λ) = |hλ|ψi|2
(2.10)
Vediamo dunque che il ket |ψi che rappresenta lo stato del sistema contiene le
predizioni relative a tutte le possibili osservabili. Questo e’ analogo alla meccanica
classica in cui la conoscenza del punto dello spazio delle fasi in cui si trova il sistema
permette di calcolare tutte le osservabili del sistema.
vi) - Per passare dalla base degli autostati di Ω a quella degli autostati di Λ conviene
41
procedere nel seguente modo. Una volta determinate le componenti di |ψi nella base |ωi i,
hωi |ψi, si può passare alla base |λi i usando la seguente espressione per |ψi:
X
|ψi =
|ωi ihωi |ψi
(2.11)
i
e proiettando su |λj i
hλj |ψi =
X
hλj |ωi ihωi |ψi
(2.12)
i
o
(λ)
ψj
=
X
(ω)
Sji ψi
(2.13)
Sji = hλj |ωi i
(2.14)
i
con
La matrice S con elementi di matrice (2.14) è chiamata la matrice di transizione tra
le due basi e soddisfa
X
X
X
∗
Skj =
hλk |ωi i∗ hλk |ωj i =
(S † S)ij =
(S † )ik Skj =
Ski
k
k
k
X
=
hωi |λk ihλk |ωj i = hωi |ωj i = δij
(2.15)
k
cioè S è una matrice unitaria. Questo è generalmente vero per le matrici di transizione
che fanno passare da una base ortonormale a un’altra ortonormale.
Esempio: Consideriamo lo spazio V 3 (R) e una base ortonormale corrispondente agli
autostati ortonormali di un operatore hermitiano Ω, con uno stato del sistema dato da
1
1
1
|ψi = |ω1 i + |ω2 i + √ |ω3 i
2
2
2
(2.16)
1 1 1
+ + =1
4 4 2
(2.17)
Segue che |ψi è normalizzato
e quindi
1
1
1
P (ω1 ) = , P (ω2 ) = , P (ω3 ) =
(2.18)
4
4
2
Supponiamo adesso di avere un’altra osservabile Λ con un set completo di autostati dati
in termini degli autostati di Ω da
|ω1 i = cos θ|λ1 i − sin θ|λ2 i
|ω2 i = sin θ|λ1 i + cos θ|λ2 i
|ω3 i = |λ3 i
(2.19)
Avremo dunque
|ψi =
1
1
1
(cos θ|λ1 i − sin θ|λ2 i) + (sin θ|λ1 i + cos θ|λ2 i) + √ |λ3 i
2
2
2
42
(2.20)
da cui
1
1
1
|ψi = (cos θ + sin θ)|λ1 i + (cos θ − sin θ)|λ2 i + √ |λ3 i
2
2
2
(2.21)
e
P (λ1 ) =
P (λ2 ) =
P (λ3 ) =
1
(1 + sin 2θ)
4
1
(1 − sin 2θ)
4
1
2
(2.22)
P
Ovviamente i P (λi ) = 1.
Sia nei postulati che nella discussione sin qui fatta ci sono alcune ambiguità e complicazioni che adesso discuteremo:
La prescrizione Ω = ω(x → X, p → P ) è ambigua. Consideriamo ad esempio
ω = xp = px
(2.23)
Ovviamente potremmo porre Ω = XP oppure Ω = P X, ma queste due espressioni non
coincidono. Infatti dal postulato 2)
/
hx|P |x0 i = −ih
d
δ(x − x0 )
dx
(2.24)
vediamo che
P = /hK
(2.25)
dove K è l’operatore definito in (1.230). Segue dunque da (1.263) che
/ I 6= 0
[X, P ] = ih
(2.26)
In questo caso adotteremo la prescrizione di Weyl che consiste nel simmetrizzare in X e
in P , cioè
1
Ω = (XP + P X)
(2.27)
2
Vediamo che questa prescrizione rende anche l’operatore Ω hermitiano dato che
(XP )† = P X
(2.28)
In casi più complessi in cui Ω contenga prodotti di due o più potenze di X con due o più
potenze di P non esiste una prescrizione univoca ed occorre ricorrere all’esperimento.
L’operatore Ω è degenere. Supponiamo di avere due autovalori degeneri ω1 = ω2 = ω.
Come calcoliamo P (ω) in questo caso? A questo scopo scegliamo una base ortonormale
nell’autospazio Vω , |ω, 1i e |ω, 2i. Supponiamo poi di partire da un caso non degenere in
cui i due autovalori siano ω e ω + . Inoltre supponiamo che
|ωi = |ω, 1i,
lim |ω + i = |ω, 2i
→0
43
(2.29)
Allora la probabilità di ottenere ω o ω + come risultato della misura è
P (ω o ω + ) = |hω|ψi|2 + |hω + |ψi|2
(2.30)
È ragionevole supporre che il risultato rimanga tale nel limite → 0 e quindi
P (ω) = |hω, 1|ψi|2 + |hω, 2|ψi|2
(2.31)
Se introduciamo l’operatore di proiezione sull’autospazio Vω
Pω = |ω, 1ihω, 1| + |ω, 2ihω, 2|
(2.32)
P (ω) = hψ|Pω |ψi = hPω ψ|Pω ψi
(2.33)
si ha
Pertanto il postulato 3) si generalizza semplicemente dicendo che la probabilità di ottenere
l’autovalore ω come risultato della misura di Ω è data da
P (ω) ∝ hψ|Pω |ψi
(2.34)
con Pω il proiettore sull’autospazio Vω .
Lo spettro di Ω è continuo. In questo caso si ha
Z
|ψi = |ωihω|ψidω
(2.35)
Dato che ω varia con continuità chiameremo
hω|ψi = ψ(ω)
(2.36)
la funzione d’onda nello spazio ω o anche l’ampiezza di probabilità per ottenere
ω dalla misura di Ω. È ovvio che non possiamo interpretare |hω|ψi|2 come una probabilità dato che ω assume infiniti valori e vogliamo una probabilità totale uguale ad uno.
Interpreteremo dunque P (ω) = |hω|ψi|2 come una densità di probabilità. Cioè
P (ω)dω = probabilità di trovare un risultato compreso tra ω e ω + dω
Con questa definizione, se |ψi è normalizzata a uno si ha
Z
Z
P (ω)dω = hψ|ωihω|ψidω = hψ|ψi = 1
(2.37)
quindi probabilità totale uguale ad uno. Se invece |ψi non è normalizzabile allora P (ω) va
pensata come una densità di probabilità relativa. Un esempio importante è quello dell’operatore X di posizione. La funzione d’onda nello spazio delle x si chiama semplicemente
la funzione d’onda. Osserviamo anche che una particella classica ha una posizione definita, mentre una particella quantistica può assumere qualunque posizione e quindi |ψ(x)|2
rappresenta la densità di probabilità per trovare la particella al punto x. In fisica classica
44
dobbiamo specificare anche l’impulso per definire completamente lo stato di una particella, invece in meccanica quantistica si dà la densità di probabilità per ottenere un dato
valore dell’impulso. Ancora, questa non è una ulteriore informazione, infatti tale densità
si ottiene sempre dal vettore di stato |ψi proiettando nella base |pi, cioè da hp|ψi = ψ(p).
La variabile Ω non ha analogo classico. Ci sono vari casi importanti in cui non
si ha analogo classico. Un esempio è lo spin dell’elettrone. In queste situazioni occorre
affidarsi all’intuizione e ad analogie, non dimenticando il confronto con i dati sperimentali.
2.1
Il collasso del vettore di stato
Abbiamo visto nel postulato 3) che il processo di misura cambia, in generale, lo stato del
sistema. Infatti se misuriamo l’osservabile Ω e |ωi i sono i suoi autovettori, lo stato del
sistema, che prima della misura era
X
|ψi =
|ωi ihωi |ψi
(2.38)
i
viene proiettato nell’autovettore corrispondente all’autovalore ωi determinato dal processo
di misura
=⇒ |ω i
|ψimisura
(2.39)
i
Notiamo che questa condizione, oltre ad essere verificata in innumerevoli esperimenti e’
anche una necessita’ logica della teoria. Infatti se non fosse cosi, la teoria non potrebbe fare
delle predizioni sui risultati sperimentali. Infatti il risultato di una misura non potrebbe
essere usato come dato iniziale di una successiva evoluzione del sistema. In altri termini
la teoria non sarebbe usabile ai fini pratici.
Vorremmo anche far notare una distinzione profonda tra il significato di misura in
fisica classica ed in meccanica quantistica. Quando si parla di misura in fisica classica
pensiamo di dover misurare il valore di una grandezza che corrisponde al valore che questa
grandezza ha nel sistema che stiamo misurando. Se misuriamo la velocita’ di una macchina
che risulta 10 m/sec., classicamente pensiamo che la macchina possieda quella velocita’
prima di effettuare la misura. In meccanica quantistica la situazione e’ profondamente
diversa a causa della natura probabilistica della teoria. Misurare significa determinare il
valore che ha una certa osservabile, dopo che l’abbiamo misurata. Prima della misura,
non sappiamo quale valore abbia la grandezza che misuriamo. Questa distinzione e’ da
tenere ben presente, perche’ spesso l’origine delle difficolta’ e’ nel diverso significato che
misura assume nei due contesti, classico o quantistico.
Occorre puntualizzare che in genere si intende di effettuare una misura ideale. Misura
ideale significa che se la si effettua su un autostato dell’osservabile che si sta misurando,
lo stato del sistema rimane inalterato.
In conclusione di questa analisi assumeremo che per ogni osservabile sia possibile una
misura ideale che lascia inalterati gli stati costituiti dagli autovettori dell’osservabile stessa.
45
Vediamo dunque che la differenza fondamentale tra meccanica classica e meccanica quantistica è che in meccanica classica si possono fare, per ogni variabile,
delle misure ideali che lasciano invariati tutti gli stati del sistema; invece, in
meccanica quantistica, una misura ideale dell’osservabile Ω lascia invariati solo
i suoi autostati.
Ripetendo ancora una volta, se come risultato della misura di Ω il risultato è l’autovalore ω, allora l’effetto della misura è la proiezione
|ψi
=⇒
misura
Pω |ψi
hPω ψ|Pω ψi1/2
(2.40)
dove Pω è il proiettore sull’autospazio Vω . Notiamo anche che, nel caso degenere, se
conosciamo lo stato del sistema prima della misura, lo conosceremo anche dopo. Per
esempio, supponiamo che in questo caso la decomposizione del vettore di stato rispetto
all’osservabile Ω che si desidera misurare, sia
X
1
1
|ψi = |ω, 1i + |ω, 2i +
αi |ωi i
2
2
(2.41)
ωi 6=ω
con l’autovalore ω doppiamente degenere. Supponiamo anche che il risultato della misura
sia proprio ω. Allora lo stato del sistema dopo la misura è certamente
|ψi
=⇒
misura
1
√ (|ω, 1i + |ω, 2i)
2
(2.42)
Se invece lo stato non è noto, dopo la misura possiamo solo dire che lo stato appartiene
all’autospazio Vω e quindi
|ψi
2.2
=⇒
misura
α|ω, 1i + β|ω, 2i
p
α2 + β 2
(2.43)
Come si verifica la teoria quantistica
La teoria quantistica fa delle predizioni probabilistiche riguardo ai risultati delle misure
su una particella che si trovi nello stato |ψi e predice l’evoluzione temporale dello stato.
Quindi, per essere in grado di verificare una teoria quantistica occorre poter effettuare due
operazioni fondamentali:
1) Creare delle particelle in uno stato definito |ψi.
2) Controllare le predizioni probabilistiche agli istanti successivi.
Osserviamo che la proprietà del collasso dei vettori di stato ci permette di creare degli
stati ben definiti. Infatti possiamo partire da uno stato generico |ψi e misurare una osservabile Ω. Se il risultato della misura è un autovalore non degenere (altrimenti sono
46
necessarie altre misure, vedi in seguito) sappiamo con certezza che il sistema si trova nello stato |ωi. Se vogliamo misurare un’altra osservabile Λ subito dopo aver misurato Ω,
avremo uno sviluppo quale, ad esempio
√
1 |ωi = √ |λ1 i + 2|λ2 i
(2.44)
3
In questo caso la teoria predice in modo univoco che si otterranno i valori λ1 e λ2 con
probabilità pari a 1/3 e 2/3 rispettivamente. Se ottenessimo come risultato λ 6= λ1 , λ2
sapremmo con certezza che la nostra teoria è errata. Se viceversa si trova λ1 o λ2 è un
buon indizio che la teoria sia corretta. Però questa non è la fine della storia. Infatti
dobbiamo ancora verificare che le probabilità sono proprio 1/3 e 2/3. D’altra parte, se
abbiamo trovato come risultato λ1 , il sistema non si trova più nello stato (2.44), ma nello
stato |λ1 i. Se quindi ripetessimo la misura di Λ troveremmo λ1 con probabilità uno.
Dobbiamo dunque ripetere l’esperimento partendo nuovamente con una particella nello
stato originale |ωi. Quindi si deve considerare un insieme quantistico di N particelle
nello stesso stato (|ωi nell’esempio in discussione). Effettuando la misura di Λ su
tutte le particelle dell’insieme dovremmo dunque trovare in media N/3 particelle nello
stato |λ1 i e 2N/3 particelle nello stato |λ2 i. La differenza con un insieme classico è che
con i risultati precedenti ottenuti dalla misura, nel caso classico si può pensare che prima
della misura N/3 particelle fossero nello stato caratterizzato da λ = λ1 e 2N/3 nello stato
λ = λ2 . Nel caso quantistico invece tutte e N le particelle sono nello stesso stato |ωi prima
della misura, ed in grado quindi di dare come risultato sia λ1 che λ2 . Solo dopo la misura
N/3 particelle sono proiettate nello stato |λ1 i e 2N/3 nello stato |λ2 i. La situazione è
completamente analoga a quanto abbiamo visto nell’esperimento di Young. Non possiamo
qui dire, prima della misura, che il sistema si trovava o nello stato |λ1 i o nello stato |λ2 i,
cosi come nell’esperimento di Young non si può dire da quale delle due fenditure passa la
particella.
2.3
Valori medi (o di aspettazione)
Abbiamo visto che una volta assegnate N particelle nello stato |ψi (supposto normalizzato)
è possibile prevedere quale frazione di esse da, come risultato della misura dell’osservabile
Ω, l’autovalore ω. Per questo è necessario risolvere il problema agli autovalori per Ω da
cui otterremo che la frazione desiderata sarà
N P (ω) = N |hω|ψi|2
(2.45)
Se invece siamo interessati a conoscere il valor medio di Ω sull’insieme delle N
particelle in esame, possiamo eludere il problema agli autovalori. Infatti si avrà, dalla
definizione di valor medio:
X
X
X
hΩi =
ωi P (ωi ) =
ωi |hωi |ψi|2 =
hψ|ωi iωi hωi |ψi =
i
i
i
X
=
hψ|Ω|ωi ihωi |ψi = hψ|Ω|ψi
i
47
(2.46)
Dunque
hΩi = hψ|Ω|ψi
(2.47)
La quantita’ hΩi e’ detta anche valore di aspettazione o valore aspettato di Ω con terminologia impropria. Piu’ corretto e’ chiamarla valor medio. Osserviamo che:
1) - Per calcolare il valor medio di Ω nello stato ψ basta conoscere lo stato e l’operatore.
2) - Se la particella si trova in un autostato di Ω, |ωi, allora
hΩi = ω
(2.48)
3) - Quando parliamo di valore medio di una osservabile ci riferiamo sempre alla media
fatta sull’insieme. Una singola particella può determinare un unico valore per la misura
di Ω.
Allorché si facciano considerazioni probabilistiche una quantità utile è la cosiddetta deviazione standard definita come
∆Ω = h(Ω − hΩi)2 i1/2
(2.49)
La quantità ∆Ω è anche detta l’indeterminazione su Ω. Si ha
1/2 1/2
hψ|(Ω − hΩi)2 |ψi
= hψ|(Ω2 − 2ΩhΩi + hΩi2 )|ψi
=
1/2
1/2
= hψ|Ω2 |ψi − hψ|Ω|ψi2
= hΩ2 i − hΩi2
∆Ω =
(2.50)
ovvero
1/2
∆Ω = hΩ2 i − hΩi2
Esercizio: Dati i seguenti operatori su V 3 (C)
0 1 0
0 −i 0
1
1
1 0 1 , Ly = √ i 0 −i ,
Lx = √
2 0 1 0
2 0 i
0
(2.51)
1 0 0
Lz = 0 0 0
0 0 −1
(2.52)
1) - Quali sono i possibili autovalori di Lz ? Chiaramente ±1, 0 visto che Lz è diagonale.
2) - Nell’ autostato di Lz con autovalore +1, quanto valgono hLx i, hL2x i e∆Lx ? Iniziamo
calcolando l’autostato di Lz , con Lz = 1. Si ha
x1
1 0 0
x1
x1
(2.53)
Lz |Lz = 1i ⇔ 0 0 0 x2 = 0 = x2
0 0 −1
x3
−x3
x3
48
da cui
x2 = x3 = 0
(2.54)
1
|Lz = 1i ⇔ 0
0
(2.55)
0 1 0
1
1
1 0 1
0 = 0
hLx i = √ 1 0 0
2
0 1 0
0
(2.56)
0 1 0
0 1 0
1 0 1
1
1
L2x ⇔ 1 0 1 1 0 1 = 0 2 0
2
2
0 1 0
0 1 0
1 0 1
(2.57)
1 0 1
1
1
1
1
1
1 0 0 0 2 0 0 =
1 0 0 0 =
hL2x i =
2
2
2
1 0 1
0
1
(2.58)
1/2 2 1/2
1
∆Lx = hL2x i − hLx i2
= hLx i
=√
2
(2.59)
Quindi
Pertanto
Si ha poi
Per cui
e
3) - Quali sono gli autovalori e gli autovettori di Lx nella base Lz ? Dato che nella rappresentazione assegnata Lz è diagonale, la matrice di Lx è già nella base Lz . Quindi gli
autovalori sono dati dall’equazione caratteristica data da
−λ √1
0 2
(2.60)
P (λ) = det √12 −λ √12 = λ(1 − λ2 ) = 0
1
√
0
−λ
2
Dunque gli autovalori sono λ = ±1, 0. Gli autovettori si ottengono facilmente, per esempio,
il caso λ = +1 si ottiene risolvendo
−1 √12 0 x1
−x1 + √12 x2
0 = √12 −1 √12 x2 = √12 (x1 + x3 ) − x2
(2.61)
√1 x2 − x3
x3
0 √12 −1
2
Risolvendo si ha
1
x1 = √ x2 ,
2
1
x3 = √ x2
2
(2.62)
Pertanto il vettore normalizzato è dato da
√1
2
1
|Lx = 1i ⇔ √ 1
2 √1
2
49
(2.63)
Analogamente si trova
−1
1
|Lx = 0i ⇔ √ 0
2 +1
1
(2.64)
√
1 2
|Lx = −1i ⇔ √ −1
2 √1
(2.65)
2
4) - Se la particella ha Lz = −1 e si misura Lx , quali sono i possibili risultati della misura
e le rispettive probabilità? I possibili risultati sono gli autovalori di Lx e quindi ±1, 0. Lo
stato in cui si trova la particella, avendo Lz = −1 è chiaramente
0
|ψi ⇔ 0
(2.66)
1
Quindi
2
P (Lx = +1) = |hLx = 1|ψi| = 12
√1
2
e inoltre
P (Lx = 0) = |hLx = 0|ψi|2 =
1
2
2
0 0 = 1
4
1 1
2
P (Lx = −1) = |hLx = −1|ψi|2 =
(2.67)
(2.68)
1
4
(2.69)
5) - Supponiamo che lo stato del sistema, nella base Lz , sia dato da
1
|ψi ⇔
2
1
2
√1
2
(2.70)
Supponiamo inoltre di misurare L2z e di trovare il risultato +1, quale è lo stato del sistema
dopo la misura? L’operatore L2z è dato da
1 0 0
(2.71)
L2z ⇔ 0 0 0
0 0 1
Quindi l’autovalore +1 di L2z è doppiamente degenere. Una base nell’autospazio corrispondente a L2z = +1 è chiaramente
1
2
|Lz = +1, 1i = |Lz = +1i ⇔ 0
0
0
2
(2.72)
|Lz = +1, 2i = |Lz = −1i ⇔ 0
1
50
Il proiettore su questo autospazio è dato da
1
0
1 0 0
PL2z =1 ⇔ 0 1 0 0 + 0 0 0 1 = 0 0 0
0
1
0 0 1
(2.73)
Pertanto
1 1
1 0 0
2
2
1
1
PL2z =1 |ψi ⇔ 0 0 0 12 = 0 ⇔ |Lz = +1i + √ |Lz = −1i
2
2
√1
√1
0 0 1
2
2
(2.74)
Lo stato normalizzato sarà quindi
PL2z =1 |ψi
||PL2z =1 |ψi||1/2
1
= √ |Lz = +1i +
3
r
2
|Lz = −1i
3
(2.75)
dove con il simbolo ||.|| intendiamo la norma quadrata di un vettore. Notiamo che la
probabilità di ottenere questo stato è data da
||PL2z =1 |ψi|| =
1 1
3
+ =
4 2
4
(2.76)
Se dopo aver misurato L2z misuriamo Lz troveremo +1 con probabilità 1/3 e −1 con probabilità 2/3.
6) - Il sistema si trova in uno stato per il quale
1
P (Lz = +1) = ,
4
1
P (Lz = 0) = ,
2
P (Lz = −1) =
1
4
(2.77)
Quale è lo stato più generale con questa proprietà? Chiaramente avremo
|ψi = α|Lz = +1i + β|Lz = 0i + γ|Lz = −1i
con
1
|α|2 = ,
4
1
|β|2 = ,
2
|γ|2 =
1
4
(2.78)
(2.79)
da cui
1
1
1
|ψi = eiδ1 |Lz = +1i + √ eiδ2 |Lz = 0i + eiδ3 |Lz = −1i
(2.80)
2
2
2
Se per esempio calcoliamo la probabilità di trovare Lx = 0 in questo stato avremo
1
P (Lx = 0) = |hLx = 0|ψi|2 = (1 − cos(δ3 − δ1 )
4
(2.81)
Quindi questa probabilità dipende solo dalla differenza delle fasi δ3 e δ1 . Infatti possiamo
sempre fattorizzare una fase nel nostro stato, per esempio δ1 , ottenendo
1
1 i(δ2 −δ1 )
1 i(δ3 −δ1 )
iδ1
|ψi = e
|Lz = +1i + √ e
|Lz = 0i + e
|Lz = −1i
(2.82)
2
2
2
51
D’altra parte, come discusso in precedenza, possiamo identificare |ψi con e−iδ1 |ψi e quindi
la fisica dipende solo da due differenze di fase. Notiamo anche che nel caso particolare
δ1 = δ2 = δ3 si ha
|ψi ⇔
1
2
√1
2
1
2
⇔ |Lx = +1i
(2.83)
mentre con δ2 − δ1 = π e δ3 − δ1 = 0
1
2
− √1
2
1
2
|ψi ⇔
2.4
⇔ |Lx = −1i
(2.84)
Variabili compatibili e incompatibili
Come abbiamo visto nelle sezioni precedenti, per una particella in uno dato stato |ψi
una variabile dinamica non ha un valore definito a meno che lo stato non sia autostato
dell’osservabile. Un tale stato è ottenuto semplicemente misurando l’osservabile. L’atto
della misura fa collassare lo stato |ψi nell’autostato |ωi con probabilità |hω|ψi|2 . In questa sezione estenderemo queste considerazioni al caso di più osservabili. In particolare ci
porremo i seguenti problemi:
1) - È possibile definire un sistema di filtraggio in modo da produrre uno stato con valori
definiti per due osservabili Ω e Λ?
2) - Qual’è la probabilità per ottenere un tale stato?
Per il primo punto possiamo pensare di partire con uno stato |ψi e misurare Ω. A
questo punto il sistema si troverà nell’autostato |ωi. Se dopo questa misura misuriamo
immediatamente Λ trovando l’autovalore λ avremo:
|ψi
=⇒
Ω
|ωi
=⇒
Λ
|λi
(2.85)
D’altra parte in generale |ωi non è un autostato di Λ né |λi è un autostato di Ω, per cui né
dopo la prima misura né dopo la seconda avremo un autostato di entrambe le osservabili.
Ma se vogliamo un autostato di entrambe le osservabili, lo stato prodotto dalla prima
misura non deve essere modificato dalla seconda, cioè |ωi deve essere autostato di Λ. Per
dare risposta positiva al primo problema occorre dunque filtrare un autostato simultaneo
delle due osservabili
Ω|ω, λi = ω|ω, λi, Λ|ω, λi = λ|ω, λi
(2.86)
Queste due relazioni implicano
[Ω, Λ]|ω, λi = 0
(2.87)
Vediamo che il commutatore [Ω, Λ] deve avere almeno un autovettore con autovalore nullo.
A questo proposito si possono avere tre possibilità distinte:
52
A) - Gli operatori Ω e Λ sono compatibili, cioè [Ω, Λ] = 0.
B) - Gli operatori sono incompatibili, cioè il commutatore è un operatore con nessun
autovalore nullo.
C) - Altri casi.
Consideriamo adesso i vari casi:
A) - Se Ω e Λ sono operatori hermitiani e compatibili esiste una base completa di autostati simultanei. Ogni vettore di questa base ha un valore ben definito delle due osservabili.
B) - Consideriamo, per esempio gli operatori X e P . Come sappiamo
/I
[X, P ] = ih
(2.88)
/ I|ψi =
ih
6 0 · |ψi
(2.89)
Ovviamente
per qualunque |ψi non banale. Pertanto X e P sono incompatibili non ammettendo autovettori simultanei. Ogni misura che filtri un autostato di X viene distrutta da una misura
successiva di P . Come vedremo meglio in seguito questa è la base del principio di indeterminazione di Heisenberg.
C) - In alcuni casi è possibile trovare alcuni stati (ma non un set completo) che sono
autostati simultanei dei due operatori non commutanti.
Discutiamo adesso le probabilità (non discuteremo il caso C) che è di scarso interesse):
A) - Supponiamo di essere nel caso non degenere. In questo caso misurando Ω si proietta
il sistema in un autostato di Ω che è anche autostato di Λ. Quindi:
|ψi
=⇒
Ω
|ω, λi
(2.90)
e
P (ω) = |hω, λ|ψi|2
(2.91)
Dato che il sistema è anche in un autostato di Λ con autovalore λ, la probabilità di trovare
λ dopo la misura di Λ è uguale ad uno. Quindi
P (ω, λ) = |hω, λ|ψi|2
(2.92)
Se invertiamo il processo di misura (prima Λ e poi Ω) il risultato non cambia. In altri termini, in questi casi possiamo espandere il vettore di stato in un set completo di autovettori
53
delle due osservabili compatibili:
|ψi =
X
|ω, λihω, λ|ψi
(2.93)
con
P (ω, λ) = P (λ, ω) = |hω, λ|ψi|2
(2.94)
Le due osservabili sono dette compatibili perché il processo di misura della seconda osservabile non altera l’autovalore ottenuto per la prima. Nel caso non degenere anche
l’autovettore non viene alterato. Questo può invece succedere nel caso degenere. A titolo
esemplificativo consideriamo V 3 (R) e due operatori Ω e Λ su questo spazio con Λ avente
un autovalore doppiamente degenere e una corrispondente base ortonormale data da
|ω1 , λi,
|ω2 , λi,
|ω3 , λ3 i
(2.95)
Supponiamo poi di avere uno stato normalizzato
|ψi = α|ω3 , λ3 i + β|ω1 , λi + γ|ω2 , λi
(2.96)
Se misurando Ω si ottiene ω3 , la misura successiva di Λ darà sicuramente λ3 con probabilità
per le due misure
P (ω3 , λ3 ) = |α|2
(2.97)
Supponiamo invece di ottenere ω1 dalla prima misura, lo stato diventerà |ω1 , λi e il risultato
di misurare Λ darà con certezza λ. La probabilità complessiva risulterà pari a |β|2 . Se
invece effettuiamo le misure in ordine inverso e il risultato della misura di Λ è λ, otterremo
lo stato normalizzato
|ψ 0 i =
Pλ |ψi
β|ω1 , λi + γ|ω2 , λi
=
1/2
|hPλ ψ|Pλ ψi|
(β 2 + γ 2 )1/2
(2.98)
con probabiltà
P (λ) = |β|2 + |γ|2
(2.99)
Se adesso misuriamo Ω otterremo lo stato |ω1 , λi con probabilità
P (ω1 ) =
|β|2
|β|2 + |γ|2
(2.100)
Quindi la probabilità di ottenere λ seguito da ω1 sarà
P (λ, ω1 ) = P (λ)P (ω1 ) = (|β|2 + |γ|2 ) ×
|β|2
= |β|2 = P (ω1 , λ)
|β|2 + |γ|2
(2.101)
Pertanto la probabilità non dipende dall’ordine delle misure nemmeno nel caso degenere.
D’altra parte lo stato può cambiare. In generale possiamo dunque dire per osservabili
compatibili l’autovalore misurato nella prima misura non cambia a seguito della seconda
misura. Corrispondentemente anche l’autospazio non cambia. D’altra parte nel caso
degenere sappiamo che l’autospazio non determina univocamente un autovettore e quindi
54
il vettore di stato può essere alterato dalla seconda misura. In conclusione un processo
di misura può essere usato per preparare un sistema in un determinato stato quantico.
Se siamo nel caso degenere e misuriamo l’osservabile Ω possiamo solo dire che il vettore
risultante sta nell’autospazio Vω . Possiamo allora misurare una osservabile compatibile
con Ω, diciamo Λ. Se questa osservabile è non degenere nell’autospazio Vω otterremo un
vettore ben definito |ω, λi, altrimenti dovremo trovare una terza variabile compatibile Γ.
Alla fine di questo processo avremo rimosso tutta la degenerazione e avremo ottenuto uno
stato ben definito caratterizzato da tutti gli autovalori delle osservabili usate nella misura,
Ω, Λ, Γ, · · · :
|ω, λ, γ, · · · i
(2.102)
Assumeremo che un tale sistema di osservabili compatibili esista sempre e lo chiameremo
un set completo di osservabili commutanti.
B) - Se Ω e Λ sono incompatibili possiamo ancora specificare quale sia la probabilità
di ottenere prima ω e poi λ dalle due misure in successione, ma invertendo l’ordine si ha
P (ω, λ) 6= P (λ, ω)
(2.103)
Infatti la successione delle due misure dà
|ψi
=⇒
Ω
|ωihω|ψi
=⇒
Λ
|λihλ|ωihω|ψi
(2.104)
|ψi
=⇒
Λ
|λihλ|ψi
=⇒
Ω
|ωihω|λihλ|ψi
(2.105)
Le rispettive probabilità sono dunque
P (ω, λ) = |hλ|ωi|2 |hω|ψi|2 6= P (λ, ω) = |hω|λi|2 |hλ|ψi|2
(2.106)
Come vediamo le due probabilità differiscono in quanto, in generale hω|ψi =
6 hλ|ψi. Inoltre
dopo la seconda misura il sistema è autostato della seconda osservabile misurata e non più
della prima.
Esempio: Consideriamo i due operatori ω = σx e λ = σz . Consideriamo inoltre lo
stato |ψi che nella base in cui σz è diagonale è dato da
α
|ψi ↔
(2.107)
β
con α e β dati da
α = cos θe−iφ , β = sin θeiφ
(2.108)
(vedi eq. 1.179). Supponiamo adesso di misurare prima σx e poi σz con risultato +1 in
entrambi i casi. Avremo (sempre nella base in cui σz è diagonale)
1
|σz = 1i ↔
(2.109)
0
55
e
1
|σx = 1i ↔ √
2
1
1
(2.110)
I prodotti scalari che ci servono sono
1
hλ|ωi = hσz = +1|σx = +1i = √
2
1
hω|λi = hσx = +1|σz = +1i = √
2
1
hω|ψi = hσx = +1|ψi = √ (α + β)
2
hλ|ψi = hσz = +1|ψi = α
(2.111)
Dunque in questo caso si ha
1
P (σz = 1, σx = 1) = |α + β|2
2
(2.112)
P (σx = 1, σz = 1) = |α|2
(2.113)
e
In termini dei parametri θ e φ si ha
1
P (σz = 1, σx = 1) = (1 + sin 2θ cos 2φ)
2
(2.114)
P (σx = 1, σz = 1) = cos2 θ
(2.115)
56
Capitolo 3
Sistemi con piu’ gradi di liberta’
3.1
Generalizzazione dei postulati a sistemi con
più gradi di libertà
L’estensione dei postulati a più gradi di libertà è molto semplice e, nel caso di particelle
consiste nel modificare il postulato 2) come segue:
In corrispondenza alle n coordinate cartesiane x1 , · · · , xn della teoria classica, esistono
n operatori commutanti X1 , · · · , Xn . In una base simultanea di questi operatori
|x1 , · · · , xn i
(3.1)
hx1 , · · · , xn |x01 , · · · , x0n i = δ(x1 − x01 ) · · · δ(xn − x0n )
(3.2)
|ψi ⇔ hx1 , · · · , xn |ψi = ψ(x1 , · · · , xn )
(3.3)
Xi |ψi ⇔ hx1 , · · · , xn |Xi |ψi = xi ψ(x1 , · · · , xn )
(3.4)
si ha
e
/
Pi |ψi ⇔ hx1 , · · · , xn |Pi |ψi = −ih
∂
ψ(x1 , · · · , xn )
∂xi
(3.5)
Inoltre le variabili classiche dipendenti ω(xi , pj ) vengono rappresentate dagli operatori
(modulo le ambiguità che abbiamo discusso in precedenza)
Ω = ω(xi → Xi , pi → Pi )
(3.6)
dP (x1 , · · · , xn ) = |ψ(x1 , · · · , xn )|2 dx1 , · · · , dxn
(3.7)
Notiamo in particolare che
è la densità di probabilità affinché le coordinate siano comprese tra x1 , · · · , xn e x1 +
dx1 , · · · , xn + dxn .
57
È importante sottolineare che il postulato è formulato strettamente in termini delle
variabili cartesiane che definiscono il sistema, dato che solo in tal caso è possibile effettuare
le semplici sostituzioni operatoriali sulla funzione d’onda
Xi → xi ,
/
Pi → −ih
∂
∂xi
(3.8)
Una volta effettuata questa sostituzione è poi possibile passare ad un generico sistema di
coordinate tramite la corrispondente sostituzione di variabili.
3.2
Prodotto tensoriale di spazi
Consideriamo adesso a scopo esemplificativo lo spazio di Hilbert relativo a due gradi di
liberta’ descritti da due operatori commutanti, ma queste considerazioni si estendono
facilmente ad un generico spazio di Hilbert in una base di n operatori commutanti.
Consideriamo allora lo spazio di Hilbert, H, come lo spazio degli autostati simultanei
di σ1z e σ2z . Vale a dire che stiamo considerando come gradi di libertà gli spin di due
particelle diverse. In genere, operatori che descrivono gradi di libertà diversi commutano
tra loro. Indicando gli autovalori di σ1z e σ2z con ±, invece di scrivere esplicitamente ±1,
si ha che i possibili stati, autostati di questi due operatori sono i seguenti quattro:
|+, +i, |+, −i, |−, +i, |−, −i
(3.9)
/ per entrambe le particelle
Dove gli spin delle due particelle, sono rispettivamente +1/2h
/ per la prima particella e −1/2h
/ per la seconda particella nel
per il primo stato, +1/2h
1
secondo stato e cosi via .
Quello che vogliamo fare è di costruire lo spazio descritto dalla base (3.9) in termini
dei due spazi di Hilbert descritti dalle basi in cui sono diagonali rispettivamente σ1z e σ2z .
Denoteremo questi due spazi con H1 e H2 e faremo vedere che è possibile, a partire da
questi due spazi, costruire uno spazio vettoriale, che chiameremo il prodotto tensoriale di
H1 e H2 ,H1 ⊗H∈ . e mostreremo che questo spazio è equivalente ad H. Costruiremo gli stati
del prodotto tensoriale partendo dagli operatori di particella singola e, per distinguerli da
σ1z e σ2 che agiscono nello spazio di Hilbert a 4 dimensioni complesse H, saranno denotati
da
(1)
(2)
σ1z ,
σ2z
(3.10)
Questi due operatori agiscono nei due spazi di Hilbert a due dimensioni complesse H1 e H2 .
Supponiamo di misurare prima lo spin della particella 1, ottenendo cosi uno stato |±i1 e
poi lo spin della particella 2 ottenendo lo stato |±i2 . Dato che i due operatori commutano,
lo stato della particella 1 non sarà alterato da questa misura, e lo denoteremo come
|±i1 ⊗ |±i2
1
~ è S
~ = 1/2h
/ ~σ
Ricordiamo che la relazione tra gli operatori ~σ e di spin S
58
(3.11)
In questo modo si ottengono 4 stati indipendenti e il prodotto tensoriale ha le stesse
dimensioni di H. Dato che vogliamo ottenere uno spazio vettoriale, assumeremo che il
prodotto precedente sia lineare rispetto ai vettori di entrambi gli spazi, cioè
(α|ψi1 + β|φi1 ) ⊗ |χi2 = α|ψi1 ⊗ |χi2 + β|φi1 ⊗ |χi2
(3.12)
|ψi1 ⊗ (α|φi2 + β|χi2 ) = α|ψi1 ⊗ |φi2 + β|ψi1 ⊗ |χi2
(3.13)
ed anche, per quanto riguarda la moltiplicazione per un numero complesso,
α(|ψi1 ⊗ |χi2 ) = (α|ψi1 ) ⊗ |χi2 ) + |ψi1 ⊗ (α|χi2 )
(3.14)
In questo modo il prodotto tensoriale risulta uno spazio vettoriale con le stesse dimensioni
complesse di H. Inoltre i vettori di base che abbiamo scelto nelle due basi hanno lo stesso
significato fisico e quindi i due spazi sono equivalenti (o isomorfi in linguaggio matematico).
Le definizioni che qui abbiamo dato valgono per spazi vettoriali di qualunque dimensione.
Tornando al problema originario, dato che ogni vettore nello spazio di parcella singola si
può espandere in una data base, avremo per generici vettori in H1 e H2 :
X
X
|ψi1 =
ci |ii1 , |χi2 =
dj |ji2
(3.15)
i=±
j=±
da cui
X
|ψi1 ⊗ |χi2 =
ci dj |ii1 ⊗ |ji2
(3.16)
i,j=±
dove abbiamo sfruttato la richiesta di linearità per il prodotto tensoriale. Dunque i vettori
|ii1 ⊗ |ji2 costituiscono una base per lo spazio prodotto tensoriale e un vettore generico si
scriverà nella forma
X
|ψi =
cij |ii1 ⊗ |ji2
(3.17)
i,j=±
Notiamo che non tutti i vettori del prodotto diretto si possono scrivere in termini del
prodotto tensore di due vettori, come nella (3.17). Questo sarà possibile solo quando i
coefficienti cij si possono fattorizzare nella forma ci dj . Notiamo anche che, per costruzione,
si ha l’identificazione
|i, ji = |ii1 ⊗ |ji2 , i, j = ±
(3.18)
essendo entrambi autostati degli stessi operatori.
Anche tutto questo si generalizza facilmente al prodotto tensore di due spazi V1 e V2
di dimensioni dimV1 = n e dimV2 = m. In questo caso il vettore più generale sarà
i=n,j=m
X
Tij |ii ⊗ |ji
(3.19)
i=1,j=1
Vediamo dunque che per spazi vettoriali finito-dimensionali si ha
dim(V1 ⊗ V2 ) = dimV1 · dimV2
59
(3.20)
Osserviamo anche che il prodotto diretto di due spazi è cosa diversa dalla somma diretta
per cui vale invece
dim(V1 ⊕ V2 ) = dimV1 + dimV2
(3.21)
Il prodotto interno in V1 ⊗ V2 è definito da
(hψ|1 ⊗ hχ|2 )(|φi1 ⊗ |ρi2 ) = hψ|φi1 hχ|ρi2
(3.22)
dove i due prodotti scalari sulla destra sono fatti negli spazi V1 e V2 rispettivamente. Il
prodotto scalare tra vettori generici si estende per linearità, esprimendo i vettori come
combinazione lineare di prodotti tensoriali. È anche utile esprimere gli operatori sugli
stati a due particelle in termini di operatori sugli spazi di particella singola.
Vogliamo adesso esprimere gli operatori σiz , operanti sullo spazio a due particelle,
(i)
in termini degli operatori σiz operanti sugli stati di particella singola. ad operatori che
agiscono sullo spazio prodotto tensoriale. Chiaramente si deve avere
(1)
σ1z (|ii1 ⊗ |ji2 ) = i(|ii1 ⊗ |ji2 ),
i, j = ±
(3.23)
Quindi possiamo definire l’azione sul prodotto diretto come
(1)
σ1z (|ii⊗ |ji2 ) = (σz1 (|ii1 ⊗ I (2) |ji2 )
(3.24)
dove I ( 2) è l’identità in H2 . Cioè σz1 agisce di fatto solo sul primo ket. Più generalmente,
dati due operatori A(1) e B (2) che agiscono rispettivamente in V1 e V2 , possiamo definire
il loro prodotto diretto come
(A(1) ⊗ B (2) )|ψ1 i ⊗ |φ2 i = (A(1) |ψ1 i) ⊗ (B (2) |φ2 i)
(3.25)
Dunque potremo scrivere
(1)
σz1 = σz1 ⊗ I (2)
(3.26)
(2)
(3.27)
In modo analogo si ha
σz2 = I (1) ⊗ σz2
L’algebra degli operatori agenti su un dato spazio vettoriale si può estendere al prodotto
diretto
(A(1) ⊗ B (2) ) · (C (1) ⊗ D(2) ) = (A(1) C (1) ) ⊗ (B (2) D(2) )
(3.28)
Segue dunque immediatamente che
[A(1) ⊗ I (2) , I (1) ⊗ B (2) ] = 0
(3.29)
e
(1)⊗(2)
(A1
(1)⊗(2) 2
+ A2
(1)
(2)
(1)
(2)
) = (A1 )2 ⊗ I (2) + I (1) ⊗ (A2 )2 + 2A1 ⊗ A2
Questa relazione è ovvia, dato che i due operatori commutano.
60
(3.30)
Torniamo adesso alla (3.17). Il suo significato è che i coefficienti cij sono le componenti
del vettore ψ nella base |ii1 ⊗ |jii . Possiamo allora costruire l’equivalenza tra lo spazio
H e H1 ⊗ H2 riordinando le componenti del prodotto tensoriale come un vettore colonna¡
Vediamo un esempio:
1
1
1
0
|+i1 ⊗ |+i2 ↔
⊗
↔
(3.31)
0 1
0 2
0
0
Infatti, in questo caso, le componenti del prodotto tensoriale si ottengono moltiplicando
tra loro le componenti dei vettori di particella singola e abbiamo scelto di ordinare le componenti del prodotto tensoriale nell’ordine c1 d1 , c2 d1 , c2 d1 , c2 d2 , con ici e di le componenti
dei vettori nei due spazi vettoriali. Ovviamente si sarebbe potuto scegliere anche un altro
ordine di moltiplicazione, il che sarebbe equivalse solo allo scambio di alcune componenti
del vettore prodotto diretto. In maniera analoga si possono costruire tutti i vettori di base
nel prodotto diretto:
0
1
1
0
(3.32)
↔
⊗
|−i1 ⊗ |+i2 ↔
0
0 2
1 1
0
0
0
0
1
(3.33)
↔
⊗
|+i1 ⊗ |−i2 ↔
1
1 2
0 1
0
0
0
0
0
↔
(3.34)
⊗
|−i1 ⊗ |−i2 ↔
0
1 2
1 1
1
Vediamo dunque che questi vettori sono effettivamente una base nello spazio prodotto
diretto a 4 dimensioni complesse. In maniera assolutamente analoga è possibile costruire,
a partire dagli operatori negli spazi di particella singola, gli operatori nello spazio a due
particelle. È sufficiente usare la stessa regola di prodotto usata per i vettori2 . Per esempio:
1
0
0
0
0 −1 0 0
1 0
1 0
(1)
σ1z = σ1z ⊗ I (2) ↔
⊗
↔
(3.35)
0 0 1 0
0 −1
0 1
0 0 0 −1
e
(2)
σ2z = I (1) ⊗ σ2z
1
0
1 0
1 0
↔
⊗
↔
0
0 1
0 −1
0
2
0 0
0
1 0
0
0 −1 0
0 0 −1
(3.36)
Questo si può giustificare rigorosamente utilizzando la rappresentazione spettrale degli
operatori
61
Notiamo infine che la relazione di completezza per lo spazio prodotto tensoriale è data
in generale da:
i=n,j=m
X
(|ii1 ⊗ |ji2 ) (hi|1 ⊗ hj|2 ) = I (1) ⊗ I (2)
(3.37)
i,j=1
In seguito ometteremo di indicare con gli indici 1 e 2 i vettori degli spazi di particella
singola in quanto i vettori dei due spazi sono univocamente determinati dall’ordine in cui
appaiono nel prorotto tensoriale, il primo a sinistra e il secondo a destra.
3.3
3.3.1
Particelle identiche
Il caso classico
Definiremo particelle identiche le particelle che sono repliche esatte le une delle altre per
quanto concerne le loro caratteristiche intrinseche, cioè massa, spin, momento magnetico,
ecc. Per esempio due elettroni sono da considerarsi come identici. Ovviamente non ci riferiamo alle loro caratteristiche contingenti quali la loro posizione o il loro impulso. Questa
definizione rimane valida sia nel caso classico che in quello quantistico, ma le implicazioni
sono enormemente diverse nei due casi. Classicamente è infatti possibile, almeno in linea
di principio, assegnare una descrizione spazio-temporale completa di ciascuna particella
del sistema. Pertanto anche particelle identiche possono essere identificate dalla loro storia
spazio-temporale. È come se potessimo assegnare a ognuna un segnaposto che le segue in
tutta la loro evoluzione. Dunque a livello classico non c’è poi molta distinzione tra particelle identiche e non identiche. Per esemplificare questo punto consideriamo un biliardo
e due palle una vicina alla buca 1 e l’altra alla buca 2. Queste palle saranno chiamate
rispettivamente palla 1 e palla 2 (vedi Figura 3.1).
In questa configurazione le due palle sono chiaramente distinguibili a causa della loro
diversa posizione spaziale, se però le scambiassimo troveremmo una configurazione equivalente. Per essere sicuri che le particelle sono distinguibili occorre mostrare che è possibile
trovare un esperimento in cui le due configurazioni non sono equivalenti. Immaginiamo
allora che due giocatori colpiscano le palle che si urtano al centro del biliardo e finiscono
nelle buche 3 e 4, come mostrato in Figura 3.1. Se chiedessimo a due fisici di predirre il
risultato avremmo due possibili risposte:
o
palla 1 in buca 3
A1 :
t=T
palla 2 in buca 4
o
palla 1 in buca 4
A2 :
t=T
(3.38)
palla 2 in buca 3
Ma l’esperimento dice che si verifica A1 e quindi A1 è giusta mentre A2 è errata. Ovviamente le due possibilità a t = T sono completamente equivalenti (cosı̀ come vi erano due
possibilità equivalenti a t = 0), cioè se un osservatore osserva solo il risultato a t = T non
avrà modo di sapere quale delle due risposte è esatta. Ciò che ci permette di sapere che la
risposta giusta è proprio A1 è la conoscenza della storia spazio-temporale delle due palle.
62
t=T
3
4
t=0
1
2
Figura 3.1: L’esempio del tavolo da biliardo discusso nel testo.
In modo analogo, le due situazioni apparentemente equivalenti a t = 0 non lo sarebbero
per qualcuno che avesse seguito la storia precedente delle due palle. Come conseguenza
in meccanica classica è possibile distinguere due particelle identiche dal fatto che le loro
storie spazio-temporali non sono identiche. D’altra parte, in meccanica quantistica non è
possibile ricostruire la storia spazio-temporale di una particella in modo completo e pertanto due configurazioni che differiscono per lo scambio di due particelle identiche devono
essere trattate come la stessa configurazione
3.3.2
Il caso di due particelle identiche. Stati simmetrici ed
antisimmetrici
Consideriamo, nel caso quantistico, il caso di due particelle distinguibili, 1 e 2. Se si
effettua una misura di posizione trovando 1 in x = a e 2 in x = b, il vettore di stato sarà
|ψi = |x1 = a, x2 = bi ≡ |a, bi
(3.39)
Se la particella 1 fosse misurata in b e la 2 in a, a causa della distinguibilità i due vettori
di stato sarebbero diversi
|ψ 0 i = |x1 = b, x2 = ai ≡ |b, ai =
6 |ψi
(3.40)
Se invece le due particelle sono identiche e denotiamo il vettore di stato con |ψ(a, b)i,
dovremo avere che questo e il vettore che corrisponde allo scambio delle due particelle
63
|ψ(b, a)i sono fisicamente equivalenti, cioè
|ψ(a, b)i = α|ψ(b, a)i
(3.41)
con α un numero complesso. Ovviamente non possiamo identificare il vettore di stato
|ψ(a, b)i né con |a, bi né con |b, ai. Questo è cosı̀ sia matematicamente che fisicamente,
in quanto nel caso di particelle identiche non possiamo attribuire il risultato x1 = a ed
x2 = b rispettivamente alle particelle 1 e 2 e nemmeno alle particelle 2 ed 1, proprio
per l’indistinguibilità3 . Ma questo significa che noi non possiamo distinguere tra i due
stati |a, bi e |b, ai, e pertanto possiamo assumere che il vettore di stato cercato sia una
combinazione lineare di questi due vettori
|ψ(a, b)i = β|a, bi + γ|b, ai
(3.42)
β|a, bi + γ|b, ai = α(β|b, ai + γ|a, bi)
(3.43)
Richiedendo la (3.41) si ha
da cui
β = αγ,
γ = αβ
(3.44)
Segue dunque
α2 = 1 ⇒ α = ±1
(3.45)
Gli stati corrispondenti risultano (a meno della normalizzazione)
α = +1,
β = +γ,
|a, b, Si = |a, bi + |b, ai
(3.46)
α = −1,
β = −γ,
|a, b, Ai = |a, bi − |b, ai
(3.47)
Una data specie di particelle deve necessariamente adeguarsi a una e una sola di queste due
possibilità. Se cosı̀ non fosse sarebbe possibile costruire un vettore del tipo α|a, b, Si +
β|a, b, Ai che però non ha proprietà di simmetria definita rispetto allo scambio a ↔ b.
Le particelle con vettori di stato simmetrici sono dette bosoni, mentre le particelle
con vettori di stato antisimmetrici sono dette fermioni. Esempi di bosoni sono i
fotoni, i gravitoni, i pioni. Esempi di fermioni sono gli elettroni, i protoni, i neutroni, i
quark. È uno dei risultati più importanti della teoria quantistica dei campi il Teorema
spin-statistica che asserisce che i bosoni hanno spin intero, mentre i fermioni hanno spin
semintero (vedi in seguito per lo spin).
Dunque se misuriamo le posizioni di due bosoni con risultati x1 = a e x2 = b, dopo la
misura lo stato del sistema sarà certamente
|ψi = |a, b, Si = |a, bi + |b, ai
3
(3.48)
È come se considerassimo la misura di X1 + X2 con autovalore a + b. Ovviamente questo
autovalore non risente del modo in cui siano assegnati a e b.
64
Questo risultato vale per la misura di qualunque osservabile, se misuriamo Ω ottenendo
come risultati ω1 e ω2 , il vettore di stato dopo la misura sarà |ω1 , ω2 , Si o |ω1 , ω2 , Ai a
seconda che si abbiano due bosoni o due fermioni.
Notiamo che per due fermioni si ha
|ω, ω, Ai = |ω, ωi − |ω, ωi = 0
(3.49)
La conseguenza di questo risultato è il Principio di esclusione che afferma che due
fermioni non possono trovarsi nello stesso stato quantico.
Tutto questo si generalizza al caso tridimensionale, ma ovviamente lo stato è ora
caratterizzato da più variabili. Per esempio potremo avere uno stato di particella singola
del tipo |ω, si con ω che caratterizza i gradi di libertà orbitali e s lo spin. In questo caso
la funzione d’onda di due fermioni sarà
|ω1 , s1 ; ω2 , s2 , Ai = |ω1 , s1 ; ω2 , s2 i − |ω2 , s2 ; ω1 , s1 i
(3.50)
Questa è zero se
ω1 = ω2
e
s1 = s2
(3.51)
Pertanto due elettroni possono stare nello stesso stato orbitale, ω1 = ω2 , se e solo se gli
spin sono diversi, s1 6= s2 .
3.3.3
Quando si può ignorare la simmetrizzazione o l’antisimmetrizzazione della funzione d’onda?
Considerando due particelle identiche molto ben separate spazialmente ci aspetteremmo
anche nel caso quantistico di poterle pensare come particelle distinte e quindi di poter
ignorare la simmetrizzazione o l’antisimmetrizzazione della funzione d’onda. Per esemplificare consideriamo due particelle identiche entrambe descritte da un pacchetto gaussiano,
uno centrato sulla terra, ψT (xT ), e l’altro centrato sulla luna, ψL (xL ). Dunque le funzioni
d’onda saranno del tipo
(xT − aT )
(xL − aL )
ψT (xT ) = AT exp −
,
ψ
(x
)
=
A
exp
−
(3.52)
L L
L
2∆2T
2∆2L
dove assumeremo che aT sia un punto sulla terra e aL un punto sulla luna. Queste
funzioni d’onda implicano che l’elettrone descritto da xT sarà in vicinanza di aT , mentre
l’elettrone descritto da xL sarà in vicinanza di aL , dato che la probabilità di trovarli in
posti che distano dai punti aT L più di qualche unità di ∆T L è molto piccola. Dunque se
le due particelle fossero distinguibili, e l’hamiltoniana che descrive il sistema non contiene
interazioni tra queste particelle, la loro funzione d’onda sarebbe
ψ(xL , xT ) = ψT (xT )ψL (xL )
(3.53)
Se scambiamo tra loro gli argomenti delle funzioni d’onda, si ottiene
ψ(xL , xT ) = ψT (xL )ψL (xT )
65
(3.54)
Entrambi i fattori sono molto piccoli, dato che l’elettrone descritto da xT sta in vicinanza
della terra, mentre quello descritto da xL sta in vicinanza della luna.
Osserviamo che tutto questo ha senso se la particella sulla luna e quella sulla terra
rimangono ben separate per tutti i valori di interesse del tempo, altrimenti l’argomento
cade non appena le funzioni d’onda hanno un overlapping apprezzabile. Per esempio se
considerassimo due bosoni descritti da due gaussiane centrate in punti a e b ben separati
all’istante iniziale, dopo qualche tempo cio’ non sarebbe piu’ possibile dato che si puo’
dimostrare che col passare del tempo la larghezza di una gaussiana aumenta e quindi non
potremmo piu’ trascurare la sovrapposizione dei pacchetti. Un’altra osservazione è che
quando si parla di sovrapposizione di funzioni d’onda ci stiamo sempre riferendo a uno
spazio particolare. Nell’esempio precedente le due funzioni non hanno sovrapposizione
nello spazio delle configurazioni, ma l’hanno nello spazio degli impulsi, e quindi in questo
spazio non possiamo ignorare la simmetrizzazione. Se invece consideriamo due particelle
con pacchetti centrati uno a un impulso piccolo e l’altro a impulso grande si può ignorare
la simmetrizzazione nello spazio degli impulsi ma non in quello delle coordinate.
66
Capitolo 4
L’equazione di Schrödinger
4.1
Soluzione dell’equazione di Schrödinger
Dopo questa lunga discussione sui primi tre postulati prendiamo adesso in esame il 4) postulato, cioè l’esistenza di una equazione che determina l’evoluzione temporale del vettore
di stato, l’equazione di Schrödinger
/
ih
∂
|ψi = H|ψi
∂t
(4.1)
Divideremo la discussione in tre fasi:
1) - Scrittura dell’equazione di Schrödinger per il problema in esame.
2) - Studio generale della soluzione.
3) - La scelta della base.
4.1.1
Scrittura dell’equazione di Schrödinger
Il postulato 4) ci dice che l’operatore H è il corrispondente dell’hamiltoniana classica,
quindi ottenibile da essa tramite l’usuale sostituzione x → X, p → P . Per esempio, per
un oscillatore armonico unidimensionale
Hclas =
1 2 1
p + mω 2 x2
2m
2
(4.2)
e quindi
H=
4.1.2
1 2 1
P + mω 2 X 2
2m
2
(4.3)
Studio generale della soluzione
Iniziamo considerando il caso in cui l’operatore H non abbia una esplicita dipendenza dal
tempo. In questo caso l’equazione di Schrödinger
/ |ψ̇i = H|ψi
ih
67
(4.4)
si puo’ risolvere usando il cosi detto metodo del propagatore. Il metodo consiste nello
sfruttare la linearita’ dell’equazione Schrödinger che ci permette di trovare la soluzione
applicando un opportuno operatore lineare al vettore di stato iniziale. Questo operatore
e’ detto il propagatore o l’operatore di evoluzione temporale. Il fatto che la soluzione
dipenda solo dalla funzione d’onda iniziale segue perche’ l’equazione e’ del primo ordine
nella derivata temporale. Dunque avremo
|ψ(t)i = U (t)|ψ(0)i
(4.5)
Possiamo determinare U (t) usando gli autovettori dell’hamiltoniana. L’equazione agli
autovalori per H sarà
H|Ei = E|Ei
(4.6)
Questa equazione viene anche chiamata l’equazione di Schrödinger indipendente dal
tempo. Supponiamo di averla risolta, allora potremo scrivere
X
X
|ψ(t)i =
|EihE|ψ(t)i =
aE (t)|Ei
(4.7)
E
E
con
aE (t) = hE|ψ(t)i
(4.8)
Inserendo la (4.7) nell’equazione di Schrödinger si trova
/
ih
∂aE (t)
/ hE|ψ̇(t)i = hE|H|ψ(t)i = EaE (t)
= ih
∂t
(4.9)
che possiamo integrare immediatamente ottenendo
−i
aE (t) = aE (0)e
Et
/h ,
Pertanto
−i
hE|ψ(t)i = e
aE (0) = hE|ψ(0)i
Et
/h hE|ψ(0)i
e
|ψ(t)i =
X
−i
|EihE|ψ(0)ie
Et
/h
(4.10)
(4.11)
(4.12)
E
o anche
U (t) =
X
−i
|EihE|e
Et
/h
(4.13)
E
Nel caso in cui H abbia autovalori degeneri, la somma andrà su ulteriori indici che dovranno
tener conto della degenerazione, cosı̀ come se lo spettro di H (cioè l’insieme dei suoi
autovalori) è continuo, al posto della somma avremo un integrale. Si può anche avere il
caso di operatori con spettro sia discreto che continuo, in tal caso la somma dovrà essere
68
sostituita da una somma sugli autovalori discreti più un integrale sugli autovalori continui,
ecc. In particolari gli stati
Et
−i
/h
|E(t)i = |Eie
(4.14)
sono detti modi normali o stati stazionari del sistema. Questo ultimo nome segue
dal fatto che se il sistema si trova in un tale stato, la distribuzione di probabilità di una
qualunque osservabile è costante nel tempo:
Et 2
−i 2
/h = |hω|E(0)i|2 = P (ω, 0)
(4.15)
P (ω, t) = |hω|E(t)i| = hω|E(0)ie
L’operatore di evoluzione dato in (4.13) può anche essere scritto nella forma
Ht
−i
/h
U (t) = e
Infatti si ha
U (t) =
X
Et
Ht
Ht
−i
−i
−i
X
/h =
/h = e
/h
|EihE|e
|EihE|e
E
(4.16)
(4.17)
E
dove abbiamo usato prima il fatto che gli stati |Ei sono autostati di H (operatore hermitiano) e poi la loro completezza. Si verifica anche immediatamente che
−i
|ψ(t)i = e
Ht
/h |ψ(0)i
(4.18)
soddisfa l’equazione di Schrödinger
Ht
Ht
−i
∂
∂ −i /h
/h |ψ(0)i = H|ψ(t)i
/ |ψ(t)i = ih
/ e
ih
|ψ(0)i = He
∂t
∂t
Inoltre, dato che H è un operatore hermitiano, U (t) è un operatore unitario
U † (t) = U −1 (t)
(4.19)
(4.20)
Una conseguenza importante di questa relazione è che la norma di un vettore non cambia
con il tempo
hψ(t)|ψ(t)i = hψ(0)|U † (t)U (t)|ψ(0)i = hψ(0)|ψ(0)i
(4.21)
Dunque l’evoluzione temporale di uno stato può essere pensata come una rotazione del
vettore nello spazio di Hilbert. Questo modo di pensare offre la possibilità di descrizioni
diverse della dinamica. Per esempio invece di usare una base fissa potremo usarne una che
ruoti come i vettori di stato (cioè ottenuta applicando ai vettori di base l’operatore U (t)).
In questo caso il vettore di stato appare fisso, mentre gli operatori si evolvono nel tempo.
D’altro canto, avendo a che fare con una trasformazione unitaria, gli elementi di matrice
degli operatori sono invarianti. Una tale rappresentazione è detta rappresentazione di
Heisenberg, mentre quella fin qui usata è detta di Schrödinger.
69
4.1.3
L’equazione di Schrödinger per una particella libera
Consideriamo il caso di una particella libera in una dimensione. L’hamiltoniana e’ data
da
P2
H=
(4.22)
2m
E’ evidente che gli autostati dell’impulso diagonalizzano anche l’hamiltoniana. Inoltre
l’equazione di Schrödinger stazionaria nello spazio delle coordinate
hx|H|Ei = Ehx|Ei
(4.23)
da luogo alla seguente equazione differenziale
/h2 d2
−
ψE (x) = EψE (x),
2m dx2
ψE (x) = hx|Ei
(4.24)
e dato che gli autostati dell’impulso sono dati da
1
/)
√ exp(ipx/h
2π
(4.25)
avremo
1
p2
/ ),
ψE (x) = √ exp(ipx/h
E=
(4.26)
2m
2π
Evidentemente l’autofunzione dell’impulso con p e quella con −p danno luogo allo stesso
autovalore dell’energia. Dunque gli autostati di H sono doppiamente degeneri. L’evoluzione di questi stati sara’ data da
1
/)
/ )|Ei = exp(−iEt/h
/ )ψE (x) = √ exp(i(px−Et)/h
ψE (x, t) = hx|E, ti = hx| exp(−iHt/h
2π
(4.27)
Dato che l’esponenziale si puo’ decomporre nella forma
/ ) = cos((px − Et)/h
/ ) + i sin((px − Et)/h
/)
exp(i(px − Et)/h
(4.28)
vediamo che la soluzione e’ un’onda piana con vettore d’onda
k=
2π
p
=
/h
λ
(4.29)
E
/h
(4.30)
e frequenza data dalla relazione
ω = 2πν =
da queste due formule segue
λ=
h
,
p
ν=
E
h
(4.31)
cioe’ le due relazioni di De Broglie che connettono le caratteristiche di una particella, E
e p con quelle dell’onda associata ν e λ. Quindi l’onda di De Broglie altro non e’ che
l’autovettore dell’hamiltoniana di particella libera proiettato nella base delle x.
70
Consideriamo una particella libera con una funzione d’onda gaussiana di larghezza ∆
al tempo t = 0
(x − a)2
−
1
2∆2
e
(4.32)
ψ(x, t = 0) =
(π∆2 )1/4
E’ possibile calcolare come questa funzione si evolve con il tempo. Senza entrare in dettagli e’ possibile dimostrare che il pacchetto rimane gaussiano ma con una larghezza che
aumenta con il tempo. Per calcolare l’aumento di larghezza, possiamo notare che a causa
della indeterminazione sull’impulso e quindi sulla velocita’, questo da’ luogo ad una indeterminazione sulla posizione data da (notiamo che la particella libera si muove di moto
uniforme)
/ht
/ht
∆P
∆X(t) = ∆v(0)t =
≈
t= √
(4.33)
m
m∆
2m∆
Questa ultima relazione puo’ essere dimostrata rigorosamente per tempi sufficientemente
grandi
Notiamo che per una particella macroscopica, con m = 1 gr e ∆ = 10−13 cm, si ha
∆v(0) ≈
1.05 × 10−34
≈ 10−16 m/sec
10−3 × 10−15
(4.34)
Se assumiamo t ≈ 300, 000 anni (1 anno ≈ 3 × 107 sec) si ha
∆X(t) ≈ 9 × 1012 × 10−16 ≈ 10−3 m
(4.35)
Dunque la dispersione per una particella macroscopica impiega tempi enormemente lunghi
prima di diventare essa stessa macroscopica. Corrispondentemente le particelle macroscopiche possono essere trattate con la meccanica classica.
4.2
Equazione di Schrödinger per due particelle
L’equazione di Schrödinger per un sistema a due particelle è
1
1
2
2
/
P +
P + V (X1 , X2 ) |ψi = H|ψi
ih|ψ̇i =
2m1 1
2m2 2
(4.36)
Il problema si può dividere in due classi:
Classe A: H separabile:
V (X1 , X2 ) = V1 (X1 ) + V2 (X2 )
(4.37)
H = H1 + H2
(4.38)
In questo caso
con
Hi =
1 2
P + Vi (Xi ),
2mi i
71
i = 1, 2
(4.39)
Classicamente le due particelle descritte dalle due hamiltoniane si evolvono in modo del
tutto indipendente e le loro energie sono separatamente conservate, mentre l’energia totale
del sistema è data da E = E1 + E2 . Consideriamo dunque uno stato stazionario
−i
|ψ(t)i = |Eie
Et
/h
(4.40)
con
H|Ei = (H1 (X1 , P1 ) + H2 (X2 , P2 ))|Ei = E|Ei
(4.41)
Dato che le due hamiltoniane commutano tra loro
[H1 (X1 , P1 ), H2 (X2 , P2 )] = 0
(4.42)
segue che si possono trovare autostati simultanei del tipo prodotto diretto
|E1 , E2 i = |E1 i ⊗ |E2 i
(4.43)
con
(1)
H1 |E1 i = E1 |E1 i
(2)
H2 |E2 i = E2 |E2 i
(4.44)
Quindi selezionando uno stato |Ei = |E1 i ⊗ |E2 i si ha
H|Ei = (H1 + H2 )|E1 i ⊗ |E2 i = (E1 + E2 )|Ei = E|Ei
(4.45)
E = E1 + E2
(4.46)
con
Ovviamente |E1 i ⊗ |E2 i ci fornisce una base in V1 ⊗ V2 e si ha
−i
|ψ(t)i = |E1 ie
E2 t
E1 t
−i
/h ⊗ |E ie
/h
2
(4.47)
Osserviamo che una volta trovate le soluzioni fattorizzate gli autostati più generali
sono
X
|Ei =
cE1 ,E2 δE,E1 +E2 |E1 i ⊗ |E2 i
(4.48)
E1 ,E2
o, nella base delle coordinate
ψE (x1 , x2 ) =
X
cE1 ,E2 δE,E1 +E2 ψE1 (x1 )ψE2 (x2 )
(4.49)
E1 ,E2
Classe B: H non separabile:
V (x1 , x2 ) 6= V1 (x1 ) + V2 (x2 )
(4.50)
In generale non si può fare molto, ma ci sono circostanze in cui la teoria può risultare
separabile se espressa in altre coordinate. Un esempio e’ il problema a due corpi con
una forza di interazione che dipende solo dalla distanza. In questo caso kl’hamiltoniana è
separabile nelle variabili del centro di massa e nelle variabili relative.
72
4.3
Più particelle in più dimensioni
Il problema di N particelle in D dimensioni, corrispondendo a N · D gradi di libertà è
matematicamente equivalente a quello di tante particelle unidimensionali. D’altra parte
risulta conveniente usare un simbolismo un pò diverso e che dipende esplicitamente dal
numero di dimensioni che stiamo considerando. Per esempio, gli autostati delle coordinate
in 3 dimensioni verranno denotati da |~xi e cosi via.
Esempio: La particella libera in 3 dimensioni.
3
H=
1 2 X 1 2
p~ =
p
2m
2m i
(4.51)
i=1
I possibili autovalori dell’energia si ottengono immediatamente e sono dati da
E = E1 + E2 + E3 =
3
X
p2i
p~ 2
=
2m
2m
(4.52)
i=1
Le autofunzioni dell’energia sono date da
ψE (~x) =
3
Y
1
/)
ψEi (xi ) = p
exp(i~
p · ~x − Et)/h
(2π)3
i=1
(4.53)
dove ψEi (xi ) sono le autofunzioni della particella libera unidimensionale. Notiamo che
qualunque autofunzione dell’impulso con |~
p| fissato e’ autofunzione dell’energia con E =
2
|~
p| /(2m). Quindi si ha una degenerazione infinita.
73
Capitolo 5
Principio di indeterminazione e
limite classico
5.1
Principio di indeterminazione
Abbiamo fin qui mostrato varie situazioni in cui il principio di indeterminazione esplica i
suoi effetti. Passiamo adesso a una dimostrazione formale. Infatti questo principio, sebbene sia uno dei capisaldi fisici su cui si regge la meccanica quantistica, dal punto di vista
della formulazione in termini dei postulati risulta una semplice conseguenza del formalismo. Abbiamo già mostrato che due osservabili che non commutano sono incompatibili,
cioè non è possibile definire un processo di misura tale da misurare simultaneamente queste osservabili. Questo fatto, che è appunto la base del principio di indeterminazione, può
essere espresso in modo più quantitativo in termini delle indeterminazioni sulle osservabili
in esame. Consideriamo allora due osservabili hermitiane, A e B, tali che
[A, B] = iC
(5.1)
con C una terza variabile hermitiana. Supponiamo che il sistema si trovi in un dato stato
|ψi e definiamo nuove osservabili sottraendo il valore di aspettazione delle precedenti
 = A − hAi,
B̂ = B − hBi
(5.2)
Avremo
(∆A)2 (∆B)2 = hψ|Â2 |ψihψ|B̂ 2 |ψi = hÂψ|ÂψihB̂ψ|B̂ψi
(5.3)
Facendo uso della disuguaglianza di Schwarz (vedi Sezione 1.2.2)
|v1 |2 |v2 |2 ≥ |hv1 |v2 i|2
dove il segno di uguaglianza vale solo per vettori paralleli, segue
2
1
1
2
2
2
2
[Â, B̂]+ + [Â, B̂] |ψi
(∆A) (∆B) ≥ |hÂψ|B̂ψi| = |hψ|ÂB̂|ψi| = hψ|
2
2
74
(5.4)
(5.5)
dove
[A, B]+ = AB + BA
(5.6)
è l’anticommutatore di due operatori A e B. Ma il commutatore di due operatori hermitiani è antihermitiano, mentre l’anticommutatore è hermitiano. Quindi stiamo calcolando
il modulo quadro di un numero complesso la cui parte reale è il valore di aspettazione
dell’ anticommutatore e la parte immaginaria il valore di aspettazione del commutatore.
Pertanto
2
2 1
1
1
1 2
hψ|
[
Â,
B̂]
+
[
Â,
B̂]
|ψi
=
hψ|[
Â,
B̂]
|ψi
(5.7)
+ |hψ|C|ψi|
+
+
2
2
4
4
Da cui
1
|hψ|C|ψi|2
4
La disuguaglianza si riduce a una uguaglianza se e solo se
(∆A)2 (∆B)2 ≥
(5.8)
Â|ψi = cB̂|ψi
(5.9)
hψ|[Â, B̂]+ |ψi = 0
(5.10)
e
La disuguaglianza (5.8) altro non è che l’espressione del principio di indeterminazione.
Infatti se applicata a variabili canonicamente coniugate come X e P , si ha C = /hI e
quindi
/h
∆X∆P ≥
(5.11)
2
Sebbene il tempo non sia una variabile dinamica, ma un semplice parametro, tuttavia
esiste una relazione di indeterminazione tempo-energia
∆E∆t ≥
/h
2
(5.12)
pur con interpretazione diversa dalla analoga relazione tra coordinate e impulsi coniugati.
Infatti la precedente relazione va intesa nel senso che l’energia di un sistema che sia in
un determinato stato per un tempo ∆t non può essere perfettamente definita ma ha uno
sparpagliamento pari a ∆E.
5.2
Teorema di Ehrenfest e limite classico
In questo capitolo studieremo come si possa riottenere la descrizione classica per i sistemi macroscopici a partire dalla meccanica quantistica. Ovviamente questo si riferisce
agli aspetti puramente quantitativi poiché l’interpretazione probabilistica della meccanica
quantistica rimane tale in qualunque limite. D’altra parte ci sono situazioni in cui ai fini
75
pratici certe probabilità diventano certezze. Iniziamo allora studiando l’evoluzione temporale del valor medio di un operatore. In generale supporremo anche che l’operatore possa
avere una dipendenza esplicita dal tempo. Si ha
=
d
hψ(t)|Ω(t)|ψ(t)i = hψ̇(t)|Ω(t)|ψ(t)i + hψ(t)|Ω̇(t)|ψ(t)i + hψ(t)|Ω(t)|ψ̇(t)i =
dt
i
i
hψ(t)|HΩ(t)|ψ(t)i − hψ(t)|Ω(t)H|ψ(t)i + hψ(t)|Ω̇(t)|ψ(t)i
(5.13)
/h
/h
Pertanto
d
i
hψ(t)|Ω(t)|ψ(t)i = − hψ(t)|[Ω(t), H]|ψ(t)i + hψ(t)|Ω̇(t)|ψ(t)i
/h
dt
(5.14)
o, in notazione più abbreviata
d
∂Ω(t)
i
hΩ(t)i = − h[Ω(t), H]i + h
i
/h
dt
∂t
(5.15)
Questa equazione è chiamata il teorema di Ehrenfest. È interessante osservare la
corrispondenza formale con la formula della meccanica analitica che esprime la variazione
nel tempo di una funzione delle variabili dinamiche q e p (ed eventualmente del tempo),
in termini della parentesi di Poisson della variabile dinamica con l’hamiltoniana
∂ω
dω(q, p, t)
= {ω, H} +
dt
∂t
(5.16)
Assumiamo (sempre nel caso unidimensionale) una hamiltoniana della forma
H=
1 2
P + V (X)
2m
(5.17)
Usando il teorema di Ehrenfest possiamo calcolare la variazione nel tempo del valor medio
della coordinata
i
1 2
i 1
1
d
/ )P i = hP i
hXi = − h[X,
P + V (X)]i = − h
(2ih
/
/
dt
2m
m
h
h 2m
(5.18)
Notiamo che in modo formale possiamo scrivere
P
∂H
d
∂H
=
⇒ hXi = h
i
m
∂P
dt
∂P
(5.19)
La regola per calcolare le derivate di H è come nel calcolo usuale quando l’operatore ammette uno sviluppo in serie di potenze della variabile (operatoriale) che si sta considerando.
In modo analogo si ha
d
i
i
hP i = − h[P, H]i = − h[P, V (X)]i
/h
/h
dt
(5.20)
Se V (X) ammette una espansione in serie di X il commutatore si può calcolare, ottenendo
per iterazione
/ X n−1
[P, X n ] = −nih
(5.21)
76
Infatti si ha
/,
[P, X] = −ih
/, · · ·
[P, X 2 ] = −2ih
(5.22)
Assumendo
/ X n−2
[P, X n−1 ] = −(n − 1)ih
(5.23)
segue
/ )X n−2 −ih
/ X n−1 = −nih
/ X n−1 (5.24)
[P, X n ] = X[P, X n−1 ]+[P, X]X n−1 = X(−(n−1)ih
Pertanto
/
[P, V (X)] = −ih
∂V (X)
∂X
(5.25)
se
V (X) =
X
cn X n
(5.26)
n
Dunque
∂V (X)
∂H
d
hP i = −h
i = −h
i
(5.27)
dt
∂X
∂X
Abbiamo dunque ottenuto le equazioni (5.19) e (5.27) che sono le equazioni di Hamilton
per i valori medi. Cerchiamo adesso di capire come queste equazioni si riducono alle
equazioni di Hamilton vere e proprie nel caso di corpi macroscopici. Consideriamo uno
stato simile a uno stato classico con la migliore definizione possibile per X e P , diciamo
|ψi = |x0 , p0 , ∆i
(5.28)
con
hXi = x0 ,
hP i = p0 ,
∆X = ∆,
∆P ≈
/h
∆
(5.29)
Un esempio di un tale stato è il pacchetto gaussiano
p0 x
(x − x0 )2
i
−
1
2∆2
e /h e
|x0 , p0 , ∆i ⇔ ψp0 ,x0 ,∆ (x) =
(π∆2 )1/4
(5.30)
Ovviamente per avere una buona descrizione macroscopica dovremo scegliere ∆ sufficientemente piccola. Per esempio potremmo prendere
∆ ≈ 10−15 m
(5.31)
cioè dell’ordine di grandezza della dimensione del protone. Questo significa avere una
indeterminazione sull’impulso pari a
∆P ≈ /h × 1015 ≈ 10−34 × 1015 Kg · m/s = 10−14 g · cm/s
(5.32)
nel caso di una particella macroscopica di massa dell’ordine del grammo, segue che l’indeterminazione sulla velocità è
∆v ≈ 10−14 cm/s
(5.33)
77
Ogni errore sperimentale concepibile su una misura di velocità è ben al di sopra di un tale
valore.
L’analogo quantistico delle equazioni di Hamilton è dunque
d
∂H
hXi = h
i,
dt
∂P
d
∂H
hP i = −h
i
dt
∂X
(5.34)
Da queste equazioni sarebbe possibile ricavare le equazioni di Hamilton per i valori medi
se potessimo sostituire il valor medio di una funzione degli operatori X e P con la funzione
delle medie
hf (X, P )i ⇒ f (hXi, hP i)
(5.35)
D’altra parte questo è vero solo se è possibile trascurare le fluttuazione, cioè se vale
hX n i = hXin
(5.36)
Ma a causa del principio di indeterminazione questo non sarà mai rigorosamente vero,
dato che ∆X 6= 0. Nel caso in esame avremo comunque
d
d
1
p0
hXi = x0 = hP i =
dt
dt
m
m
d
d
∂V (X)
hP i = p0 = −h
i
dt
dt
∂X
Da queste due equazioni si ricava l’analogo dell’equazione di Newton
mẍ0 = −h
∂V (X)
i
∂X
(5.37)
(5.38)
(5.39)
Si puo’ calcolare il secondo membro di questa espressione nella base delle coordinate.
Il risultato che si trova e’:
∂V (x) 1 ∂ 3 V (x) mẍ0 = −
(5.40)
−
∆2 + · · ·
∂x x0 2 ∂x3 x0
Il primo termine a secondo membro di questa equazione fornisce la legge di Newton, mentre
il termine successivo e tutti gli altri trascurati nascono a causa del fatto che la particella
non è localizzata nel punto x0 e quindi risponde al potenziale anche nei punti vicini a
x0 . Notiamo che tutti i termini correttivi si annullano nel caso particolare di potenziali
quadratici
V = ax2 + bx + c
(5.41)
quindi nel caso dell’oscillatore armonico. In generale le correzioni quantistiche sono piccole
per potenziali che variano poco su regioni dell’ordine di grandezza del pacchetto. La
condizione precisa è che (vedi equazione (5.40))
∂2F 2
∆ F
∂x2
(5.42)
dove F = −∂V /∂x è la forza. Nel caso numerico che abbiamo considerato (∆ ≈ 10−13 cm)
le fluttuazioni sono trascurabili per qualunque potenziale macroscopico (cioè che coinvolga
78
solo scale macroscopiche). D’altra parte si dimostra che al passare del tempo il pacchetto
si allarga. Precisamente si ha che la ’incertezza sulla posizione al tempo t e’ data, per
tempi molto lunghi da
1 /ht
∆X(t) ≈ √
(5.43)
2 m∆
Risulta che con una indeterminazione sulla velocità dell’ordine di 10−14 cm occorrono
300,000 anni affinché l’indeterminazione sulla posizione diventi dell’ordine del millimetro.
Pertanto in un caso come quello esaminato la descrizione classica è senz’altro buona. Se
però partissimo con pacchetti tale che ∆ ≈ 10−27 cm allora le cose sarebbero diverse.
D’altra parte stati di questo tipo non occorrono in pratica. Infatti se misuriamo la posizione tramite la luce nel visibile si ha a disposizione una lunghezza d’onda λ ≈ 10−5 cm
con analoga indeterminazione ∆. Per misurare X con un ∆ ≈ 10−27 cm occorre una pari
λ. Ma per questo sarebbe necessaria radiazione elettromagnetica con impulso
p=
h
6 × 10−34
≈
Kg · m/s ≈ 6 gr · cm/s
λ
10−29
(5.44)
Ma un fotone di questo tipo potrebbe far rinculare un oggetto macroscopico.
Notiamo infine che anche se x0 e p0 soddisfano le equazioni di Hamilton in buona
approssimazione, non è detto che lo stesso accada per un’altra variabile dinamica Ω dato
che
hΩ(X, P )i =
6 Ω(x0 , p0 ) = ω(x0 , p0 )
(5.45)
Per esempio, se consideriamo Ω = X 2 si ha
hx0 , p0 , ∆|X 2 |x0 , p0 , ∆i = hx0 , p0 , ∆|(X 2 − x20 )|x0 , p0 , ∆i + x20 = ∆2 + x20 6=
6= (hXi)2 = x20
5.3
(5.46)
La rappresentazione di Heisenberg
Le precedenti equazioni derivate per i valori medi degli operatori possono essere rappresentate in modo più suggestivo facendo uso della rappresentazione di Heisenberg. In questa
rappresentazione i vettori di stato vengono riportati al tempo t = 0, mentre le osservabili
diventano dipendenti esplicitamente dal tempo:
Schrödinger :
Heisenberg :
|ψ(t)iS = U (t)|ψ(0)i,
ΩS
(5.47)
|ψ(t)iS → U −1 (t)|ψ(t)iS = |ψ(0)i ≡ |ψiH
ΩS → U (t)−1 ΩS U (t) ≡ ΩH (t)
(5.48)
/ ).
Ricordiamo che per hamiltoniane non dipendenti esplicitamente dal tempo U (t) = exp(−iHt/h
Notiamo che
S hψ(t)|ΩS |ψ(t)iS
= hψ(0)|U −1 (t)ΩS U (t)|ψ(0)i = H hψ(0)|ΩH (t)|ψ(0)iH
79
(5.49)
Calcoliamo adesso la variazione temporale di una variable dinamica in rappresentazione
di Heisenberg1
d
d −1
∂ΩS
dU (t)
ΩH (t) =
U (t) ΩS U (t) + U −1 (t)
U (t) + U −1 (t)ΩS
=
dt
dt
∂t
dt
1
1
∂ΩS
−1
= −U (t)
HU (t) U −1 (t)ΩS U (t) + U −1 (t)ΩS HU (t) + U −1 (t)
U (t) =
/
/
∂t
ih
ih
1
∂ΩS
= = − U −1 (t)[H, ΩS ]U (t) + U −1 (t)
U (t)
(5.50)
/
∂t
ih
e infine
i
dΩH (t)
= − [ΩH (t), HH ] +
/h
dt
∂Ω
∂t
(5.51)
H
con
HH = U −1 (t)HU (t)
(5.52)
Ricordiamo che classicamente un’osservabile ha una evoluzione temporale data da
dω
∂ω
= {ω, H} +
dt
∂t
(5.53)
Questa relazione formale indusse Dirac a formulare delle parentesi di Poisson quantistiche
per due osservabili generiche v1 e v2 dalla regola:
i
{v1 , v2 }op = − [v1 , v2 ]
/h
(5.54)
e un principio di corrispondenza che asserisce che le parentesi di Poisson quantistiche (e
quindi i commutatori) si deducono tramite la regola
{v1 , v2 }op = {v1 , v2 }clas (x → X, p → P )
(5.55)
Nella pratica, a causa dei problemi già visti sull’ordine delle espressioni, tale principio si
applica solo alle variabili cartesiane x e y. Pertanto da
{x, p}clas = 1,
{x, x}clas = {p, p}clas = 0
(5.56)
[X, X] = [P, P ] = 0
(5.57)
segue la regola di quantizzazione
/,
[X, P ] = ih
Passando al caso di più gradi di libertà vediamo che in questo modo è possibile sostituire
il postulato 2) con
/ δij , [Xi , Xj ] = [Pi , Pj ] = 0
[Xi , Pj ] = ih
(5.58)
Per questo calcolo usiamo la proprietà dA−1 /dλ = −A−1 dA/dλA−1 facilmente ricavabile
/.
differenziando AA−1 = I. Inoltre facciamo uso di dU (t)/dt = HU (t)/ih
1
80
Capitolo 6
Oscillatore armonico
6.1
Oscillatore classico
L’ importanza dell’oscillatore armonico nello studio della fisica è dovuta al fatto che ogni
sistema che fluttua attorno a una configurazione di equilibrio può essere descritto, in
prima approssimazione, come una collezione di oscillatori armonici disaccoppiati. Da qui
l’importanza dello studio del comportamento di un singolo oscillatore armonico, sia nella
fisica classica, che nella fisica quantistica. Un singolo oscillatore armonico costituito da una
massa m attaccata a una molla di costante elastica k è caratterizzato dall’hamiltoniana
classica
r
k
1 2 1
2 2
p + mω x ,
ω=
(6.1)
H=
2m
2
m
dove ω è la frequenza classica di oscillazione. Più in generale si ha a che fare con un
potenziale V (x) con un minimo a x = x0 , come rappresentato in Figura 6.1
V(x)
x0
x
V( x0)
Figura 6.1: Un potenziale unidimensionale con un minimo in x0 .
81
Una particella nell’intorno di x0 effettuerà delle oscillazioni attorno a questo punto che
è un punto di equilibrio stabile. Si dimostra facilmente che se il sistema fa delle piccole
oscillazioni rispetto al minimo del potenziale, allora si puo’ approssimare V (x) con
1
V (x) = V (x0 ) + (x − x0 )2 V 00 (x0 ) + · · ·
2
(6.2)
Si può inoltre scegliere il sistema di riferimento in modo che V (x0 ) = 0 e prendere x0 = 01 .
In questo riferimento
1
V (x) = x2 V 00 (0) + · · ·
(6.3)
2
Dunque si arriva ancora all’hamiltoniana
H=
1 2 1
p + mω 2 x2 ,
2m
2
mω 2 = V 00 (0)
(6.4)
Un altro esempio è costituito dal potenziale elettromagnetico che soddisfa l’equazione di
D’Alembert
~ 2φ = 0
φ̈ − ∇
(6.5)
Espandendo il potenziale in onde piane
φ=
X
~
ak (t)eik · ~x
(6.6)
k
si trova
äk + |~k|2 ak = 0
(6.7)
Prima di passare allo studio dell’oscillatore quantistico ricordiamo alcune proprietà dell’oscillatore classico. Le equazioni di Hamilton sono
ẋ =
ṗ = −
p
∂H
=
∂p
m
∂H
= −mω 2 x
∂x
(6.8)
(6.9)
da cui
ẍ + ω 2 x = 0
(6.10)
x(t) = A cos ωt + B sin ωt = x0 cos(ωt + φ0 )
(6.11)
La soluzione generale è
dove x0 è l’ampiezza dell’oscillazione e φ0 la fase. Si ha anche
1
1
1
E = T + V = mẋ2 + mω 2 x2 = mω 2 x20
2
2
2
1
(6.12)
Sarà sufficiente traslare il riferimento in modo da portare il minimo nell’origine delle coordinate.
82
da cui
1/2
2E
2 2
ẋ =
= ω(x20 − x2 )1/2
(6.13)
−ω x
m
Pertanto la velocità dell’oscillatore si annulla nei punti ±x0 . Il significato fisico di questi
punti, turning points, dovrebbe essere evidente dalla Figura 6.2
V(x)
E
_x
x0
0
x
Figura 6.2: Il potenziale dell’oscillatore armonico e i turning points ±x0 .
6.2
Oscillatore quantistico
Passiamo adesso allo studio dell’oscillatore quantistico
d
/ |ψ(t)i = H|ψ(t)i
ih
dt
con
1
P2
H=
+ mω 2 X 2
2m 2
Inizieremo lo studio a partire dall’equazione di Schrödinger stazionaria
H|Ei = E|Ei
Ricordiamo che l’hamiltoniana e’ data da
p2
1
1
H=
+ mω 2 x2 = /hω P 2 + X 2
2m 2
2
dove abbiamo introdotto operatori adimensionali2
r
r
mω
1
X=
x,
P =
p
/h
/hmω
2
(6.14)
(6.15)
(6.16)
(6.17)
(6.18)
Stiamo qui cambiando le nostre convenzioni usando x e p per gli operatori quantistici e X e
P per i corrispondenti operatori adimensionali
83
Notiamo che X e P sono adimensionali poiche’
mω
1
/ = (mv)2
= 2,
mωh
/h
`
(6.19)
Si vede facilmente che
[X, P ] = i
(6.20)
Si introducono poi gli operatori non hermitiani
1
a† = √ (X − iP )
2
1
a = √ (X + iP ) ,
2
(6.21)
Chiaramente a e a† sono l’uno l’hermitiano coniugato dell’altro e prendono il nome di
operatore di distruzione (annihilation) e di creazione (creation) rispettivamente. Inoltre
soddisfano la regola di commutazione
[a, a† ] = 1
(6.22)
Invertendo le equazioni (6.21),
1 X = √ a + a† ,
2
i P = − √ a − a†
2
(6.23)
l’hamiltoniana risulta
H=
/hω 1
−(a − a† )2 + (a + a† )2 = /hω a† a +
2
2
(6.24)
E’ conveniente introdurre l’operatore numero di occupazione
N = a† a
(6.25)
1
/
H = hω N +
2
(6.26)
in termini del quale si ha
Quindi diagonalizzare N e’ equivalente a diagonalizzare H. Dalle regole di commutazione
[N, a] = −a,
[N, a† ] = +a†
(6.27)
segue che a diminuisce di 1 gli autovalori di H, mentre a† li aumenta di 1. Infatti, se
N |νi = ν|νi, segue
N (a|νi) = (aN − a)|νi = (ν − 1)(a|Ei)
(6.28)
e
N (a† |νi) = (a† N + a† )|νi = (ν + 1)(a† |νi)
(6.29)
Poiché a diminuisce gli autovalori di N di 1, segue che deve esistere uno stato |0i tale che
a|0i = 0. Infatti consideriamo un autostato |νi di N
hν|a† a|νi = hν|(a† a)|νi = ||aνi|| ≥ 0
84
(6.30)
Dunque l’equazione precedente ci dice che gli autovalori di N sono definiti positivi con la
sola eccezione l’autostato |νi tale che a|νi = 0, che corrisponde all’autovettore di N con
autovalore nullo.
A partire dallo stato |0i (vettore ciclico) si possono poi trovare tutti gli altri autostati
applicando ripetutamente a† . Per la normalizzazione, scegliendo h0|0i = 1, si ha
h0|aa† |0i = h0|(a† a + 1)|0i = h0|0i = 1
(6.31)
h0|a2 a† |0i = h0|a(a† a + 1)a† |0i = h0|aa† (a† a + 1)|0i + 1 = 2
(6.32)
inoltre
2
Assumendo allora che
1
n
(6.33)
|ni = √ a† |0i
n!
sia correttamente normalizzato ad 1, mostriamo che questo è vero per n + 1. Premettiamo
la proprietà
n
n−1
[a, a† ] = na†
(6.34)
Infatti
2
[a, a† ] = [a, a† ]a† + a† [a, a† ] = 2a†
(6.35)
Per induzione segue allora
[a, a†
n+1
n
n
] = [a, a† ]a† + a† [a, a† ] = na†
n−1 †
n
a + a† = (n + 1)a†
n
(6.36)
Segue allora (sempre per induzione)
hn + 1|n + 1i =
=
1
n+1
h0|an+1 a†
|0i =
(n + 1)!
1
1
n+1
n
n
h0|an (a†
a + (n + 1)a† )|0i = h0|an a† |0i
(n + 1)!
n!
(6.37)
Inoltre si ha
n
n
a†
a†
a†
n
n−1
)|0i = n √ |0i = n|ni
a a|ni = a a √ |0i = √ (a† a + na†
n!
n!
n!
†
†
(6.38)
(Questo seguiva anche dall’osservazione che a† aumenta di un’unità l’autovalore di a† a).
Segue che i possibili autovalori dell’energia sono
1
/
En = hω n +
(6.39)
2
Usando le equazioni (6.33) e (6.34) si ha
√
1
1
1
n
n
n−1
a|ni = √ aa† |0i = √ [a, a† ]|0i = √ na†
|0i = n|n − 1i
n!
n!
n!
dove nel secondo passaggio abbiamo usato a|0i = 0.
85
(6.40)
Capitolo 7
Momento angolare e spin
7.1
Il momento angolare
Classicamente il momento angolare e’ definito dalla relazione
~ = ~x ∧ p~
L
(7.1)
Tramite la corrispondenza usuale avremo che l’operatore quantistico (che continueremo
~ sara’ dato da
ad indicare con L)
~ =X
~ ∧ P~
L
(7.2)
Non e’ difficile calcolare i commutatori di queste quantita’. Per esempio
/ Y Px + ih
/ XPy = ih
/ Lz
[Lx , Ly ] = [Y Pz − ZPy , ZPx − XPz ] = −ih
(7.3)
Si hanno analoghe relazioni per le altre componenti. In definitiva
[Li , Lj ] = iijk Lk
(7.4)
Le proprietà algebriche dell’operatore di momento angolare permettono di trattare il
~ 2 e Lz in modo molto simile a
problema della ricerca degli autovalori e autovettori di L
quanto fatto per l’oscillatore armonico. Infatti la positività dell’hamiltoniana dell’oscillatore che ne permetteva la fattorizzazione ci permetterà in questo caso la fattorizzazione
~ 2 in operatori analoghi agli operatori di creazione e distruzione. Iniziamo definendo
di L
un operatore adimensionale
1~
(7.5)
J~ = L
/h
con regole di commutazione
[Ji , Jj ] = iijk Jk ,
i, j, k = 1, 2, 3
(7.6)
Scegliamo poi una base in cui J~ 2 e Jz siano diagonali
J~ 2 |λ, mi = λ|λ, mi,
Jz |λ, mi = m|λ, mi
86
(7.7)
Si può dimostrare che gli autovalori di J~2 sono dati da
λ = j(j + 1),
j intero o semintero
(7.8)
ed inoltre gli autovalori di Jz possono prendere 2j + 1 valori:
m = −j, −j + 1, · · · , j − 1, j
(7.9)
Nel caso in cui si realizzi il momento angolare in termini delle variabili dello spazio
~ si parla di momento
~ e P~ = −ih
/ ∇)
delle configurazioni (cioe’ in termini degli operatori X
rbitale e si trova che i soli possibili valori del momento angolare sono interi. Questo segue
perche’ in questo caso si richiede che la funzione d’onda ritorni allo stesso valore dopo
una rotazione di 2π. Per casi più generali in cui la funzione d’onda non è semplicemente
una funzione a valori complessi, ma una funzione a valori vettoriali (basta pensare al
campo elettromagnetico), la situazione è più complicata, perché nella rotazione non basta
calcolare la funzione nel punto ruotato, ma essa stessa può subire una rotazione. In
tal caso l’operatore di momento angolare si divide in due parti (vedi nel seguito), una
parte di momento orbitale, che agisce sulle coordinate, e una parte che agisce invece sulle
componenti della funzione d’onda (parte di spin. È solo sulla parte orbitale che è richiesta
la condizione che la funzione ritorni in sé dopo 2π e quindi il momento orbitale potrà avere
solo valori interi, mentre la parte di spin (o intrinseca) potrà avere anche valori seminteri.
Come abbiamo visto la teoria generale del momento angolare prevede che il momento
angolare possa assumere anche valori semiinteri, ma a parte questo risultato è ovvio che
la teoria del momento angolare non si può ridurre al solo studio del momento orbitale.
Infatti, in generale, la funzione d’onda non si ridurrà a una funzione a valori complessi, ma
potrà avere delle ulteriori proprietà. Basta pensare al campo elettromagnetico. Il campo
elettrico e magnetico, se calcolati in un sistema di riferimento ruotato non cambiano solo
perchè ruotano le coordinate del punto considerato, ma anche perché ruotano le loro
componenti. Questo è un fatto del tutto generale e che ci conduce a separare il momento
angolare in due parti, la parte orbitale, che tiene conto della rotazione delle coordinate
del punto che si sta considerando e la parte di momento angolare intrinseco, o brevemente
di spin, che tiene conto delle variazioni che possono subire le componenti delle funzione
d’onda. Nel caso fin qui esaminato di una funzione d’onda a valori complessi, questa
variazione è nulla e si dice che lo spin è zero.
7.2
Lo spin
Dal ragionamento fatto precedentemente segue che lo spin corrisponde a una vera e propria
variabile dinamica addizionale, per cui il vettore di stato corrispondente ad uno spin j sarà
caratterizzato da una funzione d’onda in una base in cui sono diagonali le coordinate, il
quadrato del momento di spin e la sua terza componente
ψj (~r, m) = h~r; j, m|ψi,
m = −j, −j + 1, · · · , j − 1, j
87
(7.10)
Dunque la funzione d’onda dipende non solo dalla posizione ma anche da una ulteriore
variabile discreta m che prende 2j + 1 valori. In questa base (la base hj, m|) il momento di
spin agisce come una matrice (2j + 1) × (2j + 1) e quindi si può pensare a ψj (~r, m) come
a un vettore con 2j + 1 componenti:
ψj (~r, j)
ψj (~r, j − 1)
···
(7.11)
ψj (~r, m) =
ψj (~r, −j + 1)
ψj (~r, −j)
Per momento angolare di spin fissato, la norma di un vettore di stato è data
hψ|ψi =
+j Z
X
3
d ~rhψ|~r; j, mih~r; j, m|ψi =
m=−j
+j Z
X
d3~r |ψj (~r, m)|2
(7.12)
m=−j
Quindi per un vettore normalizzato le probabilità di osservare la particella con proiezione
m del momento di spin è data da
Z
P (m) = d3~r |ψj (~r, m)|2
(7.13)
Prima di procedere consideriamo i casi particolari dello spin 1/2 e dello spin 1.
Spin 1/2: Sappiamo che i possibili autovalori di Jz sono ±1/2, dunque nella base degli
autovalori di Jz avremo
1 1 0
Jz =
(7.14)
2 0 −1
Inoltre si dimostra che
1
1
Jx = (J+ + J− ) =
2
2
e
i
1
Jy = − (J+ − J− ) =
2
2
0 1
1 0
(7.15)
0 −i
i 0
(7.16)
In genere si preferisce usare le matrici di Pauli, definite come
~σ = 2J~
(7.17)
e quindi date da
0 1
σx =
,
1 0
Chiaramente si ha
0 −i
σy =
,
i 0
σz =
1 0
0 −1
(7.18)
1 3
~σ 2 = 4J~ 2 = 4 · · = 3
2 2
(7.19)
σz2 = 1
(7.20)
e
88
Dalle espressioni per le matrici di Pauli segue
σx2 = σy2 = σz2 = 1
(7.21)
Dalle regole di commutazione del momento angolare si trova
X
[σi , σj ] = 2i
ijk σk
(7.22)
k
Si ha anche che le matrici σi anticommutano tra loro, cioè
[σi , σj ]+ = 0, i 6= j
(7.23)
per esempio,
[σx , σy ]+ = σx σy + σy σx =
=
1
(σx [σz , σx ] + [σz , σx ]σx ) =
2i
1
(σx σz σx − σz + σz − σx σz σx ) = 0
2i
(7.24)
Pertanto
[σi , σj ]+ = 2δij
(7.25)
Usando il risultato per il commutatore e quello per l’anticommutatore si vede subito che
X
σi σj = δij + i
ijk σk
(7.26)
k
Dunque la funzione d’onda per lo spin 1/2 è una funzione con due componenti
ψ+ (~r)
ψ(~r, 1/2)
≡
ψ1/2 (~r) =
ψ− (~r)
ψ(~r, −1/2)
(7.27)
la ψ1/2 (~r) viene chiamata spinore. Le due componenti con + e − vengono dette con spin
up e spin down rispettivamente. Per un vettore di stato normalizzato le probabilità per
spin up e spin down sono rispettivamente
Z
Z
3
2
P (+) = d ~r |ψ+ (~r)| , P (−) = d3~r |ψ− (~r)|2
(7.28)
spin 1: Si ha (ancora nella base in cui Jz è diagonale)
1 0 0
Jz = 0 0 0
0 0 −1
(7.29)
Inoltre si dimostra che
0 1 0
1
Jx = √ 1 0 1 ,
2 0 1 0
0 −i 0
1
Jy = √ i 0 −i
2 0 i
0
89
(7.30)
Si ha
J~ 2 = 1 · 2 = 2
(7.31)
e si verifica immediatamente che
Ji3 = Ji ,
i = x, y, z
In questo caso la funzione d’onda è data da
ψ(~r, +1)
ψ1 (~r) = ψ(~r, 0)
ψ(~r, −1)
(7.32)
(7.33)
Dunque, nel caso generale, si ha oltre al momento angolare orbitale un momento
angolare intrinseco o di spin. Pertanto quando si effettui una rotazione del sistema di
coordinate occorrerà considerare la trasformazione di entrambi. Usando ancora variabili
adimensionali, il momento angolare totale J~T sarà dato da
~ +S
~
J~T = L
(7.34)
~ S]
~ =0
[X,
(7.35)
Dato che
la base |~r; j, mi si può identificare con il prodotto tensoriale della base delle coordinate e
della base di spin
|~r; j, mi = |~ri ⊗ |j, mi
(7.36)
Per finire diciamo come si modifica l’equazione di Schrödinger per funzioni d’onda con
spin. Partendo sempre dall’equazione astratta
∂
|ψi = H|ψi
∂t
(7.37)
∂
h~x; j, m|ψi = h~x; j, m|H|ψi
∂t
(7.38)
/
ih
e proiettando sulla base |~x; j, mi segue
/
ih
da cui (se H commuta con J~ 2 )
X
∂
∂
/ ψj (~x, m) =
ih
Hmm0 ~x,
ψj (~x, m)
∂t
∂~x
0
(7.39)
m
dove Hmm0 (~x, ∂/∂~x) è un insieme di (2j + 1) × (2j + 1) operatori differenziali nello spazio
delle coordinate e
∂
h~x; j, m|H|~x0 ; j, m0 i = Hmm0 ~x,
δ(~x − ~x0 )
(7.40)
∂~x
90
Dunque nello spazio degli spinori l’equazione di Schrödinger diventa un insieme di (2j + 1)
equazioni accoppiate
∂
/ ψj (~x) = Hψj (~x)
ih
(7.41)
∂t
con H una matrice (2j + 1) × (2j + 1).
Nel caso particolare dello spin 1/2 usando il fatto che nello spazio delle matrici 2 × 2
le σ di Pauli e la matrice identità formano un set completo1 si può scrivere
~ ·σ
H = H0 · I + H
(7.42)
~ sono in genere operatori differenziali. Dunque la forma più generale dell’edove H0 e H
quazione di Schrödinger per una particella di spin 1/2 è (equazione di Pauli):
/
ih
∂
~ · ~σ )ψ1/2 (~x)
ψ (~x) = (H0 + H
∂t 1/2
(7.43)
Discuteremo successivamente l’interpretazione fisica dei due termini che appaiono a secondo membro in questa equazione.
7.3
Addizione di momenti angolari
Consideriamo due momenti angolari commutanti tra loro J~1 e J~2 2 . Consideriamo la somma
dei due momenti angolari
J~ = J~1 + J~2
(7.44)
e notiamo che
[Ji , Jj ] = iijk Jk
(7.45)
e quindi la somma di due momenti angolari soddisfa le stesse regole di commutazione
dei due momenti angolari. Dunque potremmo diagonalizzare sia J~2 che Jz che avranno
autovalori J(J + 1) e M rispettivamente, con J intero o semintero e
−J ≤ M ≤ J
(7.46)
Quello che vogliamo fare è determinare i possibili valori di J e M quando i due momenti
angolari che sommiamo sono caratterizzati dai due numeri quantici (j1 , m1 ) e (j2 , m2 ).
Diamo qui i risultati senza dimostrazione. Si trova che
M = m1 + m2
(7.47)
|1 − j2 | ≤ J ≤ j1 + j2
(7.48)
e
con J che varia a pasi di uno tra il valore inferiore e quello superiore.
1
Si dimostra facilmente usando le proprietà di prodotto delle matrici di Pauli e le proprietà di
traccia T r[I] = 2 e T r[~σ ] = 0
2
Usiamo qui momenti angolari adimensionali, cioè divisi per /h
91
Per esempio per due spin 1/2 il momento angolare totale può essere 0 o 1. Dato che
si può dimostrare che con J~2 e Jz si possono diagonalizzare anche ~j12 e ~j22 gli stati saranno
caratterizzati da j1 , j2 , J, M e si scriveranno nella forma
|j1 , j2 , J, M i
(7.49)
Gli autostati del momento angolare totale, in termini degli autoscatti dei due momenti
angolari, nel caso di due stati di spin 1/2, sono dati da
|j1 = 1/2, j2 = 1/2, J = 1, M = +1i = |m1 = 1/2, m2 = 1/2i,
1
|j1 = 1/2, j2 = 1/2, J = 1, M = 0i = √ (|m1 = 1/2, m2 = −1/2i + |m1 = 1/2, m2 = −1/2i)
2
|j1 = 1/2, j2 = 1/2, J = 0, M + −1i = |m1 = −1/2, m2 = −1/2i
1
|j1 = 1/2, j2 = 1/2, J = 0, M = 0i = √ (|m1 = 1/2, m2 = −1/2i − |m1 = 1/2, m2 = −1/2i)
2
(7.50)
i primi tre stati, corrispondenti a J = 1 sono detti di tripletto, mentre il quarto stato
con spin 0 e’ detto di singoletto.
92
Capitolo 8
Stati entangled
Come vedremo, in meccanica quantistica esistono degli stati con caratteristiche molto
peculiari e con un comportamento assolutamente non classico. Tipicamente si puo’ avere
uno stato composto i cui componenti hanno interagito nel passato e che poi si separano
e che se osservati a distanze non connesse da un punto di vista causale preservano una
correlazione tra loro. Queste correlazioni appaiono non locali sebbene tutte le interazioni
conosciute risultino locali con un grado di accuratezza elevatissimo. Per essere piu’ chiari
facciamo un esempio esplicito. Consideriamo un sistema composto da due sottosistemi A
e B, descritto da una funzione d’onda
X
Ψ(x, y) =
cn φn (x)ψn (y)
(8.1)
n
con x, y le variabili di posizione che descrivono i due sistemi unidimensionali. Supponiamo
inoltre che le due funzioni d’onda φn (x) e ψn (y) siano autofunzioni di due operatori OA e
OB ognuno dei quali operante nel proprio sottospazio
OA |φi = λnA |φi,
OB |ψi = µnB |ψi
(8.2)
Se misuriamo OA con risultato λnA , il sistema si proietta nel seguente stato
Ψ(x, y) → φn (x)ψn (y)
(8.3)
Se adesso viene misurata l’osservabile OB (senza che nel frattempo vengano effettuata
altre operazioni sul sistema) il risultato della misura sara’ con certezza µnB . Questo vale
a qualunque distanza dal punto in cui e’ misurata OA , viene misurato OB , cioe’ anche se
la distanza tra i due punti, dAB e’ tale da essere maggiore dell’intervallo temporale tra le
due misure, tAB moltiplicato per la velocita’ della luce c:
dAB > tAB c
(8.4)
In questo caso la distanza spazio temporale e’ detta di tipo spazio (space-like) e i due eventi
non sono casualmente connessi. Infatti, in accordo alla teoria della relativita’ ristretta non
93
e’ possibile trasportare informazioni a distanze di tipo space-like e quindi non e’ possibile
influenzare con l’azione in un punto quello che avviene in un altro ad una distanza di
questo tipo. Questo e’ il significato di punti non connessi da un punto di vista causale.
E’ su questo punto che e’ nata la discussione relativa al paradosso EPR (Einstein,
Podolski e Rosen) che riprenderemo in un secondo momento. D’altra parte si puo’ notare
che di fatto non c’e’ contraddizione con la relativita’. Infatti l’osservatore che misura OB
non ha modo di sapere, istantaneamente, cosa abbia misurato OA . Le due misure possono
solo essere confrontate a posteriori. Dunque e’ solo possibile stabilire, a posteriori, una
correlazione tra le misure. Gli istanti a cui vengono effettuate le due misure sono irrilevanti,
occorre solo essere sicuri di accoppiare bene gli eventi.
8.1
Stati a due particelle di spin 1/2
In questa sezione considereremo gli stati entangled di due particelle di spin 1/2. Lo spazio
ad una particella sara’ descritto dai due stati |ui e |di tali che
σ3 |ui = +|ui,
σ3 |di = −|di
(8.5)
Gli stati a due particelle sono ottenuti tramite prodotto tensoriale e si hanno quattro stati
indipendenti
|uui ≡ |ui ⊗ |ui,
|ddi ≡ |di ⊗ |di,
|udi ≡ |ui ⊗ |di,
|dui ≡ |di ⊗ |ui
(8.6)
Gli operatori di spin (rappresentati da matrici di Pauli) operanti sui due sottospazi saranno
indicati rispettivamente con σi e τi . Conviene ricordare come operano le matrici di Pauli
nei loro sottospazi ad una particella
σ1 |ui = +|di,
σ1 |di = +|ui
σ2 |ui = +i|di,
σ2 |di = −i|ui
σ3 |ui = +|ui,
σ3 |di = −|di
(8.7)
Osserviamo che lo spazio vettoriale che descrive lo spin 1/2 e’ uno spazio a due dimensioni
complesse e che quindi il vettore piu’ generale dipende da 2 parametri complessi o 4 parametri reali. Se pero’ ci limitiamo a considerare stati fisici, possiamo imporre la condizione
di normalizzazione ed abbiamo una fase arbitraria a disposizione. Quindi lo spazio degli
stati fisici dipende da due parametri reali. Infatti, dalla normalizzazione di α|ui + β|di
(supponendo i due ket di base normalizzati) segue
|α|2 + |β|2 = 1
(8.8)
la cui soluzione generale e’
α = cos θeiφ1 ,
94
β = sin θeiφ2
(8.9)
Scegliendo una fase overall tale che α sia reale, segue che lo stato piu’ generale e’ descritto
da
|ψi = cos θ|ui + sin θeiφ |di
(8.10)
In modo analogo lo spazio di due spin 1/2 ha quattro dimensioni complesse, ma avendo a
disposizione la normalizzazione e la fase complessiva, lo stato fisico piu’ generale dipende
da 8 − 2 = 6 parametri reali. Il prodotto tensoriale di due stati fisici ad una particella
|ψi = (cos θ1 |ui + sin θ1 eiφ1 |di) ⊗ (cos θ2 |ui + sin θ2 eiφ2 |di)
(8.11)
dipende invece da soli 4 parametri reali. Esistono pertanto 2 combinazioni reali indipendenti degli stati di base che non sono fattorizzabili. Per esempio, due tali combinazioni
sono
1
|ψ± i = √ (|udi ± |dui)
(8.12)
2
che sono rispettivamente uno stato del tripletto e lo stato di singoletto. E’ evidente che
gli stati fattorizzati sono autostati simultanei di ~σ · ~n e ~τ · m
~ per una opportuna scelta di
~n e m
~ (vedi eq. (1.182)). Come vedremo. la stessa proprieta’ non vale per gli stati non
fattorizzati.
In uno spazio di tipo VA ⊗ VB , il vettore piu’ generale e’ dato da
X
|ψi =
cij |ii ⊗ |ji
(8.13)
ij
Se
B
cij = cA
i cj
(8.14)
lo stato si dice fattorizzabile o separabile. In caso contrario lo stato e’ non fattorizzabile o entangled.
Consideriamo lo stato |ψ+ i in (8.12). Se misuriamo su questo stato σ3 con risultato
+1, lo stato viene proiettato in |udi e misurando τ3 otterremo -1. Se invece σ3 = −1,
allora τ3 = +1. dunque in questo stato nessuno dei due spin e’ definito. Anzi, si vede
facilmente che
hψ± |σi |ψ± i = hψ± |τi |ψ± i = 0
(8.15)
Dunque sugli stati entangled non esistono vettori ~n e m
~ lungo i quali gli spin siano diagonali. Infatti, come e’ ovvio dalla loro struttura lo spin delle due particelle non e’ definito.
Come sappiamo e’ invece definito lo spin totale. Dato che |ψ− i e’ lo stato di singoletto
con J = 0, segue subito
(~σ + ~τ )|ψ− i = 0
(8.16)
Sullo stato ψ+ il risultato di ~σ + ~τ e’ non nullo, dato che e’ uno stato con J = 1. In
particolare sullo stato di singoletto vale l’identita’
~σ · ~n|ψ− i = −~τ · ~n|ψ− i
per qualunque ~n, come segue dalla (8.16).
95
(8.17)
8.2
Matrice densita’
Abbiamo visto in Sezione 2.2 che i processi di verifica della meccanica quantistica richiedono in genere la ripetizione di una misura preparando un numero sufficientemente grande
di volte, N , lo stato originale. In pratica in questa preparazione si possono introdurre
degli errori che non ci permettono di riprodurre esattamente lo stesso stato. Per esempio,
se la temperatura e’ non nulla, i sistemi hanno sempre delle fluttuazioni termiche che sono
regolate da una distribuzione di probabilita’ termica. Infatti, se consideriamo autostati
dell’energia, e’ noto dalla termodinamica che le probabilita’ (statistiche adesso) di ottenere un certo valore dell’energia dipendono dalla temperatura seguendo la distribuzione di
Boltzmann
w(E) ∝ e−E/kT
(8.18)
dove T e’ la temperatura in 0 K, e k e’ la costante di Boltzmann, 1.38×10−23 Joule/Kelvin.
Il significato e’ che ad una data temperatura, le energie piu’ probabili sono quelle per cui
E ≈ kT . Dunque la probabilita’ di produrre uno stato di energia E e’ data da w(E).
Quindi, quando si considera la media di un certo operatore, oltre a considerarne il valore
di aspettazione sullo stato considerando, dovremo fare un’ulteriore media statististica. Se
indichiamo con wi la probabilita’ statistica di avere il sistema nello stato |ψi i, allora il
valor medio di un operatore A sara’ dato da
X
hAi =
wi hψi |A|ψi i
(8.19)
i
Notiamo che si puo’ scrivere
hψi |A|ψi i = Tr(Pi A)
dove Pi e’ il proiettore sullo stato |ψi i. Infatti
X
X
Tr(Pi A) =
hψj |Pi |ψk ihψk |A|ψj i =
δji δik hψk |A|ψj i = hψi |A|ψi i
j,k
(8.20)
(8.21)
j,k
Dunque
hAi =
X
wi Tr(Pi A)
(8.22)
i
Possiamo introdurre un nuovo operatore (matrice densita’) dato da
X
ρ=
wi P i
(8.23)
i
in termini del quale il valor medio di un operatore risulta dato da
hAi = Tr(ρA)
(8.24)
Ricordiamo che se il sistema si trova nello stato |ψi i la probabilita’ di trovarlo dopo una
misura in uno stato |φi e’ data da
p(φ) = |hφ|ψi i|2 = hψi |Pφ |ψi i
96
(8.25)
dove Pφ = |φihφ| e’ il proiettore sullo stato |φi. Se lo stato iniziale e’ una miscela di stati
|ψi i allora la probabilita’ di trovare lo stato |φi dopo la misura sara’
X
p(φ) =
wi hψi |Pφ |ψi i
(8.26)
i
D’altra parte si ha
Tr (Pi Pφ ) =
X
hψj |Pi Pφ |ψj i = hψi |Pφ |ψi i
(8.27)
j
Dunque
p(φ) =
X
wi Tr(Pi Pφ ) = Tr (ρPφ )
(8.28)
i
Pertanto in generale, si possono riesprimere le probabilita’ ed i valori medi usando la
matrice densita’. Talvolta si identifica lo stato del sistema con la matrice densita’ stessa.
La matrice densita’ dipende dal processo di preparazione (tramite le probabilita’ wi )
e possiede le seguenti proprieta’
1. La matrice densita’ ha traccia uguale ad 1:
X
X
X
X
Tr ρ =
hj|ρ|ji =
wi hj|Pi |ji =
wi δij δij =
wi = 1
j
ij
ij
(8.29)
i
dove l’ultima relazione segue dal significato probabilistico delle wi
2. La matrice densita’ e’ hermitiana. Questo segue dalla hermiticita’ dei proiettori
3. La matrice densita’ e’ un operatore definito positivo. Un operatore A e’ definito
positivo se per ogni stato |ψi si ha hψ|A|ψi ≥ 0. L’enunciato segue osservando che
i wi sono numeri positivi e i proiettori sono operatori definiti positivi1
4. Vale la seguente diseguaglianza
Trρ 2 ≤ 1
(8.30)
Infatti
Trρ 2 =
X
wi wj Tr(Pi Pj ) =
ij
X
ij
wi wj δij =
X
wi2 ≤ 1
(8.31)
i
dove abbiamo sfruttato le proprieta’ dei proiettori ed il fatto che essendo ogni wi ≤ 1
si ha wi2 ≤ wi , da cui prendendo la somma
X
X
wi2 ≤
w1 = 1
(8.32)
i
i
1
Infatti, se si considera un proiettore
Pi ed un generico stato con la seguente decomposizione
P
sulla base dei proiettori, |ψi = i ci |ψi i, segue hψ|Pi |ψi = |ci |2 > 0 per qualunque |ψi.
97
Quest’ultima proprieta’ permette di distinguere tra quello che si chiama uno stato puro,
cioe’ il sistema preparato in un unico stato quantico |ψi, e una miscela statistica. Per uno
stato puro wψ = 1 con tutti gli altri wi uguali a zero. Allora si ha
ρ = |ψihψ| = Pψ
(8.33)
ρ2 = Pψ2 = Pψ = ρ
(8.34)
e quindi
e quindi per il caso puro in equazione (8.31) vale l’uguaglianza. Si mostra facilmente che
e’ vero anche il viceversa, cioe’ se vale ρ2 = ρ allora lo stato e’ puro. Infatti se vale questa
relazione si ha
X
0 = ρ2 − ρ =
(wi2 − wi )Pi
(8.35)
i
dove i Pi sono i proiettori sugli stati |ii. Segue
wi2 = wi
(8.36)
che ha due soluzioni, wi = 0 o wi = 1. dato che la somma di tutti i wi deve fare
P
uno, i wi = 1, segue che tutti i wi devono essere nulli eccetto uno, diciamo wĩ = 1 e,
corrispondentemente
ρ = |ĩihĩ|
(8.37)
che implica che lo stato e’ puro.
Quando lo stato non e’ puro si parla di una miscela di stati. In tal caso nella (8.31)
si ha una stretta disuguaglianza. Dunque il caso puro ed il caso di una miscela di stati
possono essere distinti in un modo indipendente dalla base di vettori che si sta usando2 ,
semplicemente guardando alla traccia del quadrato della matrice densita’.
Facciamo un esempio semplice. Consideriamo un sistema descritto da due stati |±i.
Uno stato puro e’, per esempio,
1
|ψi = √ (|+i − |−i)
2
(8.38)
La matrice densita’ e’data da
ρψ = |ψihψ| =
1
(|+ih+| + |−ih−| − |+ih−| − |−ih+|)
2
Rappresentando gli stati come vettori colonna avremo
1
0
|+i ⇔
,
|−i ⇔
0
1
e
1
|ψi ⇔ √
2
2
1
−1
(8.40)
Ricordiamo che la traccia di un operatore non dipende dalla base di cui si fa uso
98
(8.39)
(8.41)
Si trova allora
1
ρψ =
2
1 −1
−1 1
(8.42)
che soddisfa
ρ2ψ = ρψ
(8.43)
Se invece consideriamo una miscela in cui lo stato |+i sia presente con probabilita’ 1/2 e
quello |−i con uguale probabilita’, la matrice densita’ sara’ data da
1
1
ρ = |+ih+| + |−ih−|
2
2
(8.44)
ed in notazioni 2 × 2
1
ρ=
2
1 0
0 1
(8.45)
che soddisfa
1
1
ρ2 = ρ ⇒ Trρ2 = < 1
(8.46)
2
2
La differenza tra queste due diverse configurazioni del sistema puo’ essere vista considerando i valori medi delle osservabili. Per un sistema a due componenti, quale quello in
esame, un operatore e’ semplicemente una matrice 2 × 2. Possiamo allora considerare le
matrici di Pauli3
1 0
0 −i
0 1
(8.47)
, σz =
, σy =
σx =
0 −1
i 0
1 0
per le quali si ha
Tr (ρψ σx ) = −1,
Tr (ρψ σy ) = 0,
Tr (ρψ σz ) = 0
(8.48)
e
Tr (ρσx ) = 0,
Tr (ρσy ) = 0,
Tr (ρσz ) = 0
(8.49)
Consideriamo ancora l’espressione generale della matrice densita’, nella base in cui e’
diagonale
X
ρ=
wi |iihi|
(8.50)
i
dove wi e’ la probabilita’ che il sistema si trovi nello stato |ii. La dipendenza temporale
di ρ segue immediatamente dalla equazione di Schrödinger per gli stati
X i
X i
i
ρ̇ =
wi −
H|iihi| +
wi +
|iihi|H = − [H, ρ]
(8.51)
/h
/h
/h
i
i
3
Queste tre matrici intervengono nella descrizione delle particelle con spin 1/2. Nel presente
contesto la loro rilevanza e’ che assieme alla matrice identita’ costituiscono un set completo di
matrici 2 × 2. Cioe’ ogni matrice di questo tipo si puo’ scrivere come combinazione lineare a
coefficienti complessi delle matrici di Pauli e della matrice identita’
99
Notiamo che questa equazione differisce nel segno da quella a cui soddisfano le equazioni
del moto per gli operatori in rappresentazione di Heisenberg. Questa equazione (detta
di von Neumann) e’ l’equivalente dell’equazione di Liouville della meccanica statistica
classica, cioe’ l’equazione per la densita’ nello spazio delle fasi classico. Dall’evoluzione
temporale degli stati
|ψ(t)i = U (t)|ψ(0)i
(8.52)
segue subito
ρ(t) = U (t)ρ(0)U † (t)
(8.53)
Da questa equazione si ha il risultato
Tr[ρn (t)] = Tr[ρn (0)]
(8.54)
per qualunque potenza intera. Infatti
Tr[ρn (t)] = Tr[U (t)ρ(0)U † (t) · · · U (t)ρ(0)U † (t)] = Tr[ρn (0)]
(8.55)
come segue dalla unitarieta’ di U (t) e dalla prorieta’ ciclica della traccia. Questo mostra,
in particolare. che la proprieta’ fondamentale di ρ
Tr[ρ] = 1
(8.56)
e’ conservata nel tempo (conservazione della probabilita’) ed inoltre che anche la proprieta’
per uno stato di essere puro o misto, dettata dalla traccia di ρ2 , e’ conservata nel tempo.
8.3
Entropia e entanglement
In fisica il concetto di entropia e’ legato al disordine di un sistema fisico e rappresenta
il numero dei modi in cui un sistema macroscopico puo’ essere realizzato in termini dei
microsistemi componenti. Il concetto di entropia che introdurremo in questo contesto,
l’entropia di von Neumann, e’ invece piu’ prossimo a quello introdotto da Shannon nella
sua teoria dell’informazione. Consideriamo una collezione classica di stati, cioe’ un insieme
di punti che, come abbiamo visto rappresenta lo spazio delle fasi del sistema (vedi Fig.
8.1). L’idea dell’entropia di informazione e’ quella di definire una quantita’ che decresce
con l’aumentare dell’informazione. Consideriamo un sottoinsieme Sn dello spazio delle
fasi (vedi Fig. 8.2) e supponiamo di sapere che il sistema si trova in uno qualunque degli
stati in Sn . Piu’ grande e’ il numero di stati in Sn e minore e’ l’informazione. Se il
sottoinsieme contiene un solo stato sappiamo con certezza che il sistema si trova in quello
stato. Il minimo di informazione si ha quando il sottoinsieme Sn coincide con tutto lo
spazio delle fasi, dato che in questo caso il sistema si puo’ trovare in uno qualunque degli
stati. Definiamo allora l’entropia come il logaritmo del numero degli stati in Sn
S = log n
100
(8.57)
2
N
3
1
Figura 8.1: Spazio delle fasi classico. Ogni stato e’ rappresentato da un punto.
2
N
3
Sn
1
Figura 8.2: Un sottoinsieme Sn dello spazio delle fasi classico.
Dunque S = 0 quando si ha il massimo di informazione ed e’ al valore massimo, S = log N ,
quando si ha il minimo di iformazione.
Consideriamo come caso particolare un sistema (classico) di m spin. In questo caso il
sistema ha N = 2m stati e l’entropia massimale (minimo di informazione) risulta
S = m log 2
(8.58)
In queste considerazioni abbiamo implicitamente assunto che il sistema possa stare in
uno qualunque degli stati in Sn con egual probabilita’. Piu’ in generale possiamo definire
una funzione probabilita’, P (i), sullo spazio delle fasi, con la condizione
N
X
P (i) = 1,
P (i) ≥ 0
(8.59)
i=1
Si definisce allora entropia la quantita’
S=−
N
X
P (i) log P (i)
(8.60)
i=1
La motivazione del segno meno e’ che le P (i) sono quantita’ minori od uguali ad uno e
quindi il loro logaritmo e’ negativo, mentre noi vogliamo S positiva. Nel caso esaminato
101
in precedenza le probabilita’ sono scelte come segue
P (i) =
1
n
if
i ∈ Sn ,
P (i) = 0
if
i∈
/ Sn
(8.61)
Infatti gli stati in Sn sono equiprobabili, la probabilita’ che il sistema non sia in Sn e’ zero
e la somma dei P (i) deve fare 1. Dunque si ha
S=−
X 1
X 1
1
log =
log n = log n
n
n
n
i∈Sn
(8.62)
i∈Sn
Nel caso in cui non si sappia niente dello stato in cui si trova il sistema che equivale a dire
che si puo’ trovare in uno qualunque degli N stati con probabilita’ 1/N segue
S = log N
(8.63)
e l’entropia e’ massimale. Dunque quando S e’ massima non si conosce niente sullo stato
del sistema. Al contrario, quando S assume il valore minimo, S = 0, allora sappiamo con
esattezza in quale stato si trovi il nostro sistema.
Come abbiamo visto la quantita’ che in meccanica quantistica generalizza l’idea di
probabilita’ e’ la matrice densita’ e quindi von Neumann ha definito l’entropia di uno
stato quantistico in termini della matrice densita’ associata
S = −Tr[ρ log ρ]
(8.64)
La matrice densita’ e’ hermitiana e quindi diagonalizzabile con una trasformazione unitaria. Dunque possiamo definire la traccia nella base in cui ρ e’ diagonale. Indicando con ρi
gli autovalori di ρ si ha
X
S=−
ρi log ρi
(8.65)
i
Se la matrice densita’ si riferisce allo stato di un sistema in cui siano definiti N operatori
di proiezione ortogonali Pi , la matrice densita’ e’ data da
ρ=
N
X
wi Pi
(8.66)
i=1
dove wi sono le probabilita’ di avere lo stato |ii. Nella base in cui i Pi sono diagonali, la
matrice densita’ e’ diagonale con autovalori wi e dunque
X
S=−
wi log wi
(8.67)
i
e vediamo che l’entropia di von Neumann coincide con quella definita da Shannon.
102
8.4
Matrice densita’ ridotta e misura dell’entanglement
L’ idea di entropia introdotta nella Sezione precedente e’ particolarmente rilevante per i
sistemi composti in quanto fornisce, come vedremo, una misura dell’entanglement degli
stati. Consideriamo allora un sistema composto da due sottosistemi 1 e 2. Una base
ortonormale e’ data da
|i, ji ≡ |ii ⊗ |ji,
i = 1, 2, · · · , N, j = 1, 2, · · · , M
(8.68)
dove |ii e |ji sono due basi ortonormali per i due sistemi 1 e 2. Lo stato normalizzato piu’
generale sara’ dunque
X
X
|ψi =
cij |i, ji,
|cij |2 = 1
(8.69)
i,j
i,j
Consideriamo un operatore O1 che agisca sul solo sistema 1, avremo
hi, j|O1 |i0 , j 0 i = (O1 )ii0 δjj 0 ,
(O1 )ii0 = hi|O1 |i0 i
Supponiamo di voler calcolare il valor medio di O1 sullo stato |ψi. Avremo
X
X
X
hO1 i = hψ|O1 |ψi =
c∗ij ci0 j 0 (O1 )ii0 δjj 0 =
(O1 )ii0
ci0 j c∗ij
ii0 jj 0
ii0
(8.70)
(8.71)
j
Introduciamo l’operatore densita’ ridotto per il sistema 1 come quell’operatore i cui elementi di matrici sono dati da
X
(ρrid )i0 i =
ci0 j c∗ij
(8.72)
j
Notiamo che se pensiamo ai coefficienti cij come elementi di una matrice c (in generale
non quadrata), questa relazione si puo’ anche scrivere nella forma
ρrid = cc†
(8.73)
hO1 i = Tr[O1 ρrid ]
(8.74)
Vediamo dunque che
Formalmente possiamo ottenere la matrice densita’ ridotta anche tracciando la matrice
densita’ dell’intero sistema ρ = |ψihψ| sugli stati del sistema 2. In dettaglio
X
ρ = |ψihψ| =
c∗k1 l2 ci1 j2 |i1 i ⊗ |j2 ihk1 | ⊗ hl2 |
(8.75)
i1 j2 k1 l2
La traccia parziale sul sistema 2 e’ definita nel seguente modo
X
X X
ρrid = Tr2 [ρ] =
hm2 |ψihψ|m2 i =
c∗k1 l2 ci1 j2 |i1 ihk1 |δj2 m2 δl2 m2
m2
m2 i1 j2 k1 l2
103
(8.76)
da cui
ρrid =
X
X
ci1 j2 c∗k
1 j2
i1 k1
|i1 ihk1 | =
j2
X
(ρrid )i1 k1 |i1 ihk1 |
(8.77)
i1 k1
Che ρ1 sia una matrice densita’ lo si deduce notando che ne ha tutte le proprieta’
formali. Infatti ha traccia 1:
XX
X
Tr[ρrid ] =
cij c∗ij =
|cij |2 = 1
(8.78)
i
j
ij
come segue dalla normalizzazione di |ψi. ρrid e’ hermitiana
X
X
(ρrid )∗ii0 =
(cij c∗i0 j )∗ =
ci0 j c∗ij = (ρrid )i0 i
j
(8.79)
j
ed inoltre e’ definita positiva. Per questo basta mostrare che per un generico stato |φi di
1 si ha hφ|ρ1 |φi ≥ 0:
!
X
X X
X X
X
hφ|ρrid |φi =
b∗i (ρ1 )ii0 bi0 =
b∗i
cij c∗i0 j bi0 =
b∗i cij
bi0 ci0 j
(8.80)
ii0
ii0
j
l
i
i0
e introducendo
dj =
X
b∗i cij
(8.81)
i
la precedente relazione diventa
hφ|ρrid |φi =
X
|dj |2 ≥ 0
(8.82)
j
Cosi come abbiamo introdotto una matrice densita’ ridotta per il sistema 1, potremmo
anche introdurre una matrice densita’ ridotta per il sistema 2.
Supponiamo adesso che il vettore di stato |ψi sia fattorizzabile, cioe’
cij = c1i c2j
La condizione di normalizzazione diventa
X
X
|c1i |2 =
|c2j |2 = 1
i
(8.83)
(8.84)
j
e la matrice densita’ sara’
(ρrid )i0 i =
X
2∗
1 1∗
c1i0 c2j c1∗
i cj = ci0 ci
(8.85)
j
ed il valore di aspettazione di O1
hO1 i = Tr[O1 ρrid ] =
X
c1i c1∗
i0 (O1 )i0 i = hφ|O1 |φi
ii0
104
(8.86)
con
|φi =
X
c1i |ii
(8.87)
i
e lo stato del sottosistema 1 e’ uno stato puro (cosi come quello del sottosistema 2). Dunque
per uno stato complessivo fattorizzato, la matrice ridotta si fattorizza nel prodotto dei
coefficienti dello stato puro 1. Notiamo che noi abbiamo supposto che lo stato complessivo
sia uno stato puro. In tal caso la matrice densita’ dello stato e’ il proiettore sullo stato
stesso e soddisfa ρ2 = ρ, mentre la matrice densita’ ridotta non e’ in generale un proiettore
e non soddisfa ρ21 = ρ1 .
Facciamo il seguente esempio. Consideriamo lo stato entangled
1
|ψ− i = √ (|udi − |dui)
2
(8.88)
Questo e’ uno stato puro del sistema 1 + 2. I coefficient cij sono dati da
1
cud = −cdu = √
2
cuu = cdd = 0,
(8.89)
da cui si trova facilmente
1
(ρrid )uu = (ρrid )dd = ,
2
(ρrid )ud = (ρrid )du = 0
(8.90)
Dunque
ρrid
1
=
2
1 0
0 1
1
= 1
2
(8.91)
Pertanto
1
ρ2rid = ρrid
(8.92)
2
che non e’ un proiettore. Pertanto lo stato che corrisponde a questa matrice densita’ e’
uno stato misto. Infatti corrisponde ad una miscela di spin su e spin giu’, ognuna con
probabilita’ 1/2. Possiamo ora calcolare l’entropia associata a ρrid . Si ha
1 1
1
1
S = − log − log = log 2
2
2 2
2
Dunque l’entropia e’ massima (il sistema ha due stati) e non sappiamo in quale
stati si trova il sistema 1. Supponiamo invece di sapere che i coefficienti cij , in un
di due spin 1/2, sono dati da
1
cij =
2
Segue
1
(ρrid )uu = (ρrid )ud = (ρrid )du = (ρrid )dd =
2
Cioe’
1/2 1/2
ρrid =
1/2 1/2
105
(8.93)
dei due
sistema
(8.94)
(8.95)
(8.96)
Si verifica immediatamente che questo e’ un proiettore
ρ2rid = ρrid
(8.97)
e dunque il sistema 1 si trova in uno stato puro. Infatti se calcoliamo l’entropia, notando che i due autovalori della matrice densita’ sono necessariamente 0 ed 1, essendo un
proiettore ed avendo traccia 1, si trova4
S = −1 log 1 − 0 log 0 = 0
(8.98)
il sistema ha entropia minimale e dunque conosciamo con certezza il suo stato. Infatti si
verifica immediatamente che lo stato del sistema 1 + 2 e’ uno stato fattorizzato
1
1
|ψi = √ (|ui + |di) ⊗ √ (|ui + |di)
2
2
(8.99)
Che questo stato e quello considerato precedentemente siano due stati distinti, lo si puo’
verificare direttamente tramite una misura dello spin del sistema 1. Infatti, nel caso dello
stato entangled, come abbiamo visto in precedenza
hσi i = 0
(8.100)
mentre per lo stato fattorizzato si ha
0 1
1/2 1/2
=1
hσx i = Tr
1 0
1/2 1/2
(8.101)
mentre si trova zero per i valori medi di σy e σz .
Nel caso in esame e’ possibile esprimere in forma del tutto generale la matrice densita’
ridotta, osservando che la matrice hermitiana 2 × 2 piu’ generale la si puo’ scrivere in
termini della matrice identita’ e delle matrici di Pauli nella forma
~ · ~σ
ρrid = A + B
(8.102)
~ reali. Se imponiamo la condizione di traccia uguale ad 1, segue
con A e B
Tr[ρrid ] = 2A = 1 → A =
1
2
(8.103)
~ )
Scriviamo allora (posto ~v = 2B
ρrid
1 + v3
1 + ~v · ~σ
2
=
=
1
2
v
2 +
1
2 v−
1 − v3
2
(8.104)
con
v± = v1 ± iv2
4
(8.105)
qui definiamo la quantita’ 0 log 0 come il limite di log per che tende a zero che e’ zero.
106
Questa matrice ha traccia 1 e determinante
det[ρrid ] =
1 − |~v |2
4
(8.106)
Dunque gli autovalori della matrice densita’ ridotta sono
1 ± |~v |
2
(8.107)
Dato che la matrice densita’ deve essere definita positiva segue
|~v | ≤ 1
(8.108)
L’entropia e’ data da
S=−
1 + |~v | 1 − |~v |
1 − |~v |
1 + |~v |
log
−
log
2
2
2
2
(8.109)
Questa funzione e’ rappresentata graficamente in Fig. 8.3
S
v
Figura 8.3: Il grafico rappresenta l’entropia di eq. (8.109) in funzione di |~v |.
Come si vede si tratta di una funzione decrescente con massimo in |~v | = 0 e minimo
in |~v | = 1. In particolare, per ~v = 0 si ha il minimo di informazione e
1
ρrid = 1
2
(8.110)
in accordo con l’esempio precedente. In maniera analoga per |~v | = 1 si ha il massimo di
informazione e quindi entropia nulla. In questo punto l’informazione e’ massima dato che
la matrice densita’ diventa un proiettore
ρ2rid =
1 + 2~v · ~σ + |~v |2
2 + 2~v · ~σ + |~v |2 − 1
|~v |2 − 1
=
= ρrid +
4
4
4
(8.111)
Dunque quando ~v e’ un versore la matrice densita’ ridotta diventa un proiettore sugli
autostati ~v · ~σ che avranno autovalori ±1.
107
Il significato del vettore ~v che appare nella matrice densita’ e’ molto semplice, infatti
rappresenta il valor medio delle matrici σi nello stato corrispondente. Infatti
hσi i = Tr[ρrid σi ] = Tr[
X
1X
1 + ~v · ~σ
σi ] =
vj Tr[σj σi ] =
vj δij = vi
2
2
j
(8.112)
j
dove abbiamo usato le seguenti proprieta’ delle matrici di Pauli
Tr[σi ] = 0,
Tr[σi σj ] = 2δij
che seguono dalla proprieta’ (7.26) delle matrici di Pauli
X
σi σj = δij + i
ijk σk
(8.113)
(8.114)
k
8.5
L’esperimento della doppia fenditura e stati
entangled
.
.
.
n
2
1
1
0
S
-1
-1
.
.
.
-2
-n
Figura 8.4: La schematizzazione dell’esperiomento di Young usata nel testo.
Studieremo adesso una versione semplificata dell’esperimento della doppia fenditura.
Questa versione ci permettera’ di mostrare in maniera semplice come il processo di misura
si possa interpretare in termini di un processo di entanglement tra sistema da misurare
e apparato di misura. La schematizzazione che seguiremo e’ illustrata in Fig. 8.4. Gli
elettroni sono prodotti dalla sorgente S e possono passare solo dai punti indicati con 1
e −1. Gli elettroni5 possono solo arrivare nei punti indicati con n, · · · , −1, 0, 1 · · · n dove
vengono rivelati (per esempio impressionando una lastra sensibile).
5
In questa sezione considereremo l’esperienza realizzata con elettroni ma analoghe considerazioni
si potrebbero fare usando dei fotoni.
108
Come sappiamo l’evoluzione di uno stato e’ una trasformazione lineare sui vettori e
quindi se
|ψi → |ψ 0 i, |φi → |φ0 i
(8.115)
una combinazione lineare dei vettori di stato si evolve secondo la legge
α|ψi + β|φi → α|ψ 0 i + β|φ0 i
(8.116)
Iniziamo pensando ad entrambe le fenditure, rappresentate da 1 e −1, aperte. Allora lo
stato iniziale si evolvera’ nel seguete modo
|Si → |1i + | − 1i
(8.117)
dove abbiamo indicato con |Si lo stato che descrive l’elettrone alla sorgente e con | ± 1i gli
stati dell’elettrone al passaggio delle due fenditure. Se l’elettrone viene rivelato nel punto
denotato con n, indicheremo lo stato con |ni e l’evoluzione dell’elettrone dalla fenditura
allo schermo di rivelazione sara’ data da
X
|1i →
ψn |ni
(8.118)
n
con probabilita’ di arrivare in n data da |ψn |2 se la fenditura −1 viene chiusa. Analogamente se chiudiamo la fenditura 1 avremo
X
| − 1i →
φn |ni
(8.119)
n
con probabilita’ |φn |2 . Se le fenditure sono entrambe aperte avremo
X
|1i + | − 1i →
(ψn + φn )|ni
(8.120)
n
Dunque la probabilita’ che l’elettrone arrivi in n sara’ data da
Pn = |ψn + φn |2 6= |ψn |2 + |φn |2
(8.121)
La differenza e’ particolarmente evidente se consideriamo il punto 0. Infatti per simmetria
avremo ψ0 = φ0 e
P0 = 4|φ0 |2
(8.122)
mentre considerando le due fenditure chiuse a turno, la somma delle due probabilita’ e’
2|φ0 |2 .
Ricordiamo anche che le ampiezze ψn e φn descrivono la funzione d’onda dell’elettrone
che, nel caso in esame, sara’ un’onda sinusoidale. Se consideriamo le ampiezze per arrivare
nel punto n̄ puo’ succedere che le due ampiezze siano sfasate di π. In questo caso sono
uguali a parte il segno (ricordiamo che cos(α + π) = − cos α. Corrispondentemente la
probabilita’ di rivelare un elettrone nel punto n̄ e’ uguale a zero. Dunque si ottiene una
figura di interferenza con dei massimi (per esempio in 0) e dei minimi (per esempio in n̄).
109
Notiamo che la somma delle due probabilita’ che si hanno tenendo chiusa una volta la
fenditura 1 ed una volta quella −1, sarebbe |ψn̄ |2 + |φn̄ |2 .
Supponiamo adesso di avere entrambe le fenditure aperte, ma di voler determinare
da quale fenditura passa l’elettrone. Questo puo’ essere fatto in maniera molto semplice
usando una particella di spin 1/2, nello stato |di, posta nella fenditura 1. Se l’elettrone
passa dalla fenditura 1 lo spin si ribalta e lo stato fa una transizione a |ui. Se invece
passa da −1, lo spin rimane nello stato iniziale |di (vedi Fig. 8.5). Adesso il problema
1
S
-1
Figura 8.5: La determinazione del passaggio dell’elettrone da una fenditura o l’altra
viene fatta tramite uno spin 1/2, diretto verso il basso, posto nella fenditura 1 e che
l’elettrone ribalta quando passa da 1.
va pensato nello spazio di Hilbert che e’ il prodotto diretto dello spazio di Hilbert che
descrive l’elettrone e lo spazio di Hilbert (a due dimensioni complesse) che descrive lo spin
1/2. Lo stato iniziale sara’ dunque
|S, di = |Si ⊗ |di
(8.123)
Nel caso in cui l’elettrone passi da 1 avremo
|S, di → |1, ui
(8.124)
|S, di → | − 1, di
(8.125)
mentre se passa da −1
Dato che in questo caso entrambi i fori sono aperti avremo
|S, di → |1, ui + | − 1, di
(8.126)
Dunque, l’effetto della misura, e’ di realizzare uno stato entangled tra l’elettrone e lo spin
1/2, cioe’ tra il sistema e l’apparato di misura. L’evoluzione temporale successiva sara’
X
X
|1, ui + | − 1, di →
ψn |n, ui +
φn |n, di ≡ |ψi
(8.127)
n
n
Per calcolare la probabilita’ di trovare l’elettrone nel punto 0 e’ conveniente usare il formalismo dei proiettori. Indichiamo con Q0 il proiettore sul sottospazio corrispondente a 0
e teniamo conto del fatto che nello spazio prodotto diretto tale stato e’ degenere, si avra’
Q0 = |0, uih0, u| + |0, dih0, u|
110
(8.128)
e la probabilita’ cercata e’
P0 = hψ|Q0 |ψi = |h0, u|ψi|2 + |h0, d|ψi|2 = 2|ψ0 |2
(8.129)
dove si e’ tenuto conto del fatto che gli stati di spin sono ortonormali. Dunque il misurare
la fenditura da cui passa l’elettrone e’ equivalente a chiudere alternativamente le due
fenditure o, se vogliamo, al risultato classico quando si studia questo esperimento facendo
uso di particelle classiche invece che di onde.
Lo stesso risultato lo si puo’ ottenere usando il formalismo della matrice densita’
ridotta. Dall’espressione della |ψi data in eq. (8.127) ed usando le stesse notazioni usate
nella eq. (8.69) si ha
cnu = ψn , cnd = φn
(8.130)
e la matrice densita’ ridotta sara’ data da
X
∗
(ρrid )nm =
cnj c∗mj = ψn ψm
+ φn φ∗n
(8.131)
j=u,d
Per calcolare la probabilita’ di trovare l’elettrone in 0, dovremo considerare il proiettore
sullo stato 0 che, questa volta, il va preso nello spazio ridotto
Q0 = |0ih0|
(8.132)
La probabilita’ cercata si trova prendendo la traccia della densita’ ridotta con il proiettore
X
P0 = Tr[ρrid Q0 ] =
(ρrid )nm (Q0 )mn ]
(8.133)
nm
D’altra parte
(Q0 )nm = hn|0ih0|mi = δn0 δm0
(8.134)
P0 = 2|ψ0 |2
(8.135)
e dunque
Analogamente la probabilita di trovare l’elettrone in un punto generico n̄ si cacola usando
il proiettore
Qn̄ = |n̄ihn̄|
(8.136)
e
(Qn̄ )nm = δnn̄ δmn̄
(8.137)
Pn̄ = |ψn̄ |2 + |φn̄ |2
(8.138)
da cui
E’ interessante considerare una variante in cui lo spin che serve da apparato di misura non sempre si ribalti ma rimanga invece inalterato al passaggio dell’elettrone con
probabilita’ |β|2 e che invece si ribalti, segnalando il passaggio, con probabilita’ |α|2 con
|α|2 + |β|2 = 1. In questo caso l’evoluzione dalla sorgente al primo schermo sara’
|S, di → α|1, ui + β|1, di + | − 1, di
111
(8.139)
con l’evoluzione temporale successiva data da
X
(αψn |n, ui + (βψn + φn )|n, ui)
α|1, ui + β|1, di + | − 1, di →
(8.140)
n
Questa e’ del tutto analoga alla eq. (8.127) con le sostituzioni
ψn → αψn ,
φn → (βψn + φn )
(8.141)
e quindi la probabilita’ di osservare l’elettrone nel punto 0 e’ data da
P0 = |α|2 |ψ0 |2 + |β|2 |ψ0 |2 + |φ|2 + β(ψ0∗ φ0 + ψ0 φ∗0 ) = |ψ0 |2 + φ0 |2 + β(ψ0∗ φ0 + ψ0 φ∗0 ) (8.142)
dove abbiamo assunto β reale ed usato |α|2 + |β|2 = 1, Dato che per simmetria ψ0 e φ0
sono uguali, si trova
P0 = 2(1 + β)|ψ0 |2
(8.143)
Notiamo che β = 1 significa che lo spin dell’apparato di misura rimane sempre insensibile al passaggio dell’elettrone e questo caso risulta equivalente al caso in cui non si
determina da quale foro passa l’elettrone e infatti P0 = 4|ψ0 |2 . Se invece β = 0, siamo nel
caso in cui si determina sempre il foro di passaggio e pertanto si ha
P0 = 2|ψ0 |2
come trovato precedentemente.
112
(8.144)
Capitolo 9
La critica EPR
Fino a non molto tempo fa la maggior parte dei libri di meccanica quantistica non ripoortava nessuna discussione sulla interpretazione della meccanica quantistica. Questo fatto
e’ del tutto peculiare ed e’ il contrario di quanto accade in fisica classica in cui, di norma,
si inizia discutendo il concetto di misura di una quantita’ fisica e l’interpretazione che si
deve dare a queste misure. Questo risulta possibile perche’ l’assunzione fondamentale della
fisica classica e’ che, in linea di principio, sia sempre possibile rendere la misura di una
quantita’ fisica indipendente dall’apparato di misura. Ovviamente non e’ che non ci siano
interferenze tra l’apparato di misura e la quantita’ che si vuole misurare ma, secondo la
fisica classica, non ci sono ostacoli di principio a rendere questa interferenza piccola a piacere ed in particolare piu’ piccola delle incertezze tipiche di ogni misura (limitazioni delle
scale di lettura, ecc.). Questo non e’ vero nell’ambito quantistico, dove non e’ possibile
separare in maniera netta l’apparato di misura dalla quantita’ che si intende misurare.
Questo fatto crea ovviamente delle ambiguita’ nella interpretazione delle misure stesse.
D’altro canto, ad oggi, la meccanica quantistica e’ stata applicata in un numero enorme
di situazioni fisiche diverse e sempre con pieno successo, al di la di ogni interpretazione
che si voglia dare del concetto di misura. E’ solo di recente che anche i libri di testo
dedicano qualche paragrafo al problema interpretativo. Uno dei motivi e’ che di recente
gli esperimenti in situazioni tipicamente quantistiche sono diventati possibili. Pertanto
risulta possibile discutere il problema della interpretazione su base quantitativa.
Nel passato e’ stata essenzialmente la discussione di due situazioni paradossali, il gatto
di Schrödinger1 e la critica di Einstein, Podolsky e Rosen (EPR)2 , che ha polarizzato la
discussione. Discuteremo il primo paradosso in seguito. Iniziamo adesso a discutere la
critica EPR.
Facciamo alcune premesse. Per giudicare il successo di una teoria fisica occorre porsi
due domande:
1. La teoria e’ corretta? Il grado di correttezza di una teoria dipende evidentemente dal confronto con i dati sperimentali e quindi solo il confronto tra teoria ed
1
2
Vedi: E. Schrödinger, Die Naturwissenschaften 23 (1935) 807-812, 823-828, 844-849.
Vedi: A. Einstein, B. Podolsky e N. Rosen, Physical Review 47 (1935) 777.
113
esperimento può rispondere a questa questione. Inoltre e’ opportuno sottolineare
che l’accordo significa che le previsioni teoriche si accordano con i dati sperimentali
a disposizione ed entro le incertezze dovute agli strumenti di misura. Può benissimo
accadere che la correttezza sia smentita da future misure di precisione superiore,
oppure che nuovi esperimenti non siano interpretabili in termini della teoria che
abbiamo a disposizione.
2. La descrizione fornita dalla teoria e’ completa? Questa affermazione e’ da
intendersi nel seguente senso: ogni elemento della realta’ fisica deve avere una controparte nella descrizione teorica. Ovviamente per rispondere a questa questione
dobbiamo essere in grado di decidere quali siano gli elementi di realtà. Noi faremo
uso della seguente definizione: Se, senza recare disturbo al sistema in esame, e’ possibile prevedere con certezza (cioe’ con probabilita’ uno) il valore di una quantita’
fisica, esiste un elemento di realta’ fisica corrispondente a questa quantita’ fisica. In
meccanica classica tutte le coordinate e tutti gli impulsi sono elementi di realta’.
Per illustrare queste considerazioni studiamo un caso unidimensionale. Sappiamo che
ad ogni grandezza fisica possiamo associare un operatore, A. Se abbiamo un autovettore
di A
A|ωi = ω|ωi
(9.1)
la quantita’ A ha con certezza il valore ω quando il sistema si trova in |ωi. Per esempio
se lo stato (nello spazio delle configurazioni) e’
/
ψp (x) = N eip0 x/h
(9.2)
questo e’ un autostato dell’impulso con autovalore p0 . Pertanto l’impulso della particella
nello stato ψ(x) e’ un elemento di realta’. Questo stato non e’ ovviamente un autostato
della posizione, che dovrebbe essere
ψx0 (x) = Cδ(x − x0 )
(9.3)
Quello che possiamo calcolare e’ la probabilita’ di trovare la particella, in un autostato
d’impulso assegnato, in un intervallo [a, b] dell’asse reale. Questa sara’ data da
Z
P (a, b) =
b
|ψp |2 dx = |N |2 (b − a)
(9.4)
a
Poiche’ la probabilita’ dipende solo dalla differenza b − a, tutti i valori della posizione sono
equiprobabili. Dunque non possiamo dire quale sia la coordinata della particella in un tale
stato. La potremmo misurare, ma in questo caso, come sappiamo, si altererebbe lo stato
del sistema immediatamente dopo la misura. Il risultato della meccanica quantistica e’
dunque: se conosciamo con certezza l’impulso di una particella, le sue coordinate non sono
elementi della realta’. Questa conclusione si applica a qualunque coppia di variabili A e
B che non commutano tra loro, [A, B] 6= 0. Cioe’ quando gli operatori corrispondenti a
114
due quantita’ fisiche diverse non commutano tra loro, le due quantita’ non possono essere
elementi di realta’ simultaneamente.
La conseguenza e’ che:
1. La descrizione quantistica in termini di funzione d’onda non e’ completa, oppure,
2. quando due operatori non commutano le quantita’ fisiche corrispondenti non possono
avere realtà simultanee. Infatti se avessero realtà simultanee entrerebbero nella
descrizione completa (per l’ipotesi di completezza). Quindi se la funzione d’onda
fornisse una descrizione completa allora i valori delle due osservabili potrebbero
essere predetti.
L’assunzione della meccanica quantistica e’ che la funzione d’onda fornisce una descrizione completa della realta’, completa nel senso che e’ possibile misurare un set completo
di osservabili commutanti. Vedremo che anche questa posizione porta a dei problemi che
sono precisamente quelli sollevati da EPR.
Ripetiamo qui l’argomento che abbiamo discusso all’inizio del capitolo sugli stati entangled. Supponiamo di avere due sistemi I e II che interagiscono nell’intervallo temporale
(0, T ) con l’interazione che si annulla dopo il tempo T . Supponiamo di conoscere gli stati
prima del tempo t = 0. Usando l’equazione di Schrödinger possiamo calcolare come si
evolvono questi stati per ogni istante successivo ed anche, quindi, per t > T . In questa situazione non saremo pero’ in grado di conoscere lo stato di ciascuno dei sistemi.
Per questo dobbiamo procedere alla misura di una qualche osservabile di particella singola. Supponiamo di misurare l’osservabile della particella 1 corrispondente all’operatore A
con autovalori ai ed autostati (lavorando ancora nello spazio delle configurazioni) ui (x1 ).
Possiamo decomporre lo stato delle due particelle (lavorando ancora nello spazio delle
configurazioni)
X
Ψ(x1 , x2 ) =
ψi (x2 )ui (x1 )
(9.5)
i
Le ψi (x2 ) sono niente altro che i coefficienti dell’espansione sul set completo ui (x1 ). Se
misurando A si trova il valore ai allora lo stato collassa in
Ψ(x1 , x2 ) ⇒ ψi (x2 )ui (x1 )
(9.6)
Chiaramente la scelta delle funzioni ui (x) dipende dalla scelta dell’osservabile A. Se avessimo scelto una diversa osservabile B con autovalori bi ed autostati vi (x1 ) si sarebbe
ottenuto
X
Ψ(x1 , x2 ) =
φi (x2 )vi (x1 )
(9.7)
i
Se adesso misuriamo B e troviamo bi avremo il collasso
Ψ(x1 , x2 ) ⇒ φi (x2 )vi (x1 )
(9.8)
Pertanto come conseguenza della misura di osservabili diverse fatte sul sistema I, il sistema
II puo’ avere funzioni d’onda differenti. Ma dato che i due sistemi non interagiscono
115
il secondo sistema non puo’ cambiare, qualunque cosa si sia fatto sul primo. Pertanto
vediamo che e’ possibile assegnare due funzioni d’onda diverse al secondo sistema. E
quindi, non potendo assegnare un vettore di stato definito al secondo sistema si dedurrebbe
che la descrizione in termini di funzioni d’onda non e’ completa. Ovviamente se A e B
commutano non c’e’ alcun problema dato che le funzioni ψ e φ coincideranno. Ma se A e
B non commutano abbiamo un problema.
9.1
EPR riformulato da Bohm e Aharanov
Discuteremo adesso il paradosso EPR in un ambito più semplice, quello di due sistemi
di spin, come formulato da Bohm e Aharonov. Iniziamo discutendo le ipotesi di realtà,
di località (le misure sul sistema I non influiscono sul sistema II) e di completezza come
assunte da EPR. Iniziamo riformulando i principi di base:
• Completezza: Ogni elemento della realta’ fisica deve avere una controparte nella
descrizione teorica.
• Principio di realta’: Se, senza intervenire sul sistema, si puo’ prevedere con certezza il valore di una grandezza fisica, a questa corrisponde una proprieta’ oggettiva
(o elemento di realta’) del sistema, cioe’ una proprieta’ che non dipende da possibili
osservatori esterni al sistema.
• Principio di localita’: Consideriamo due sistemi fisici che per un certo periodo
di tempo siano isolati tra di loro, allora l’evoluzione delle proprieta’ fisiche di un
sistema (in tale intervallo temporale) non può essere influenzata da operazioni fatte
sull’altro. Questa formulazione della località è anche detta località alla Einstein.
L’esempio più semplice, dovuto a Bohm e Aharonov (Phys. Rev. 108 (1957) 1070), e’
diventato la base di molte delle discussioni sul paradosso EPR. Bohm ha considerato il
decadimento di una particella di spin totale zero come il π 0 , un mesone, in una coppia
elettrone positrone, che sono particelle di spin 1/2. La conservazione del momento angolare
richiede che nello stato finale la coppia e+ e− abbia momento angolare nullo3 .
Chiamando elettrone e positrone particella 1 e 2 rispettivamente, considereremo le due
seguenti possibilita’
1. Esperimento I - Misura dello spin della particella 1 tramite un apparato di Stern e
Gerlach orientato lungo l’asse z.
2. Esperimento II - Misura dello spin della particella 1 tramite un apparato di Stern e
Gerlach orientato lungo l’asse x.
3
Seguiremo qui la discussione di C.D. Cantrell e M.O. Scully in Physics Reports, C 43, 500
(1978)
116
Notiamo che le due misure si riferiscono a osservabili incompatibili, la misura dello spin
lungo l’asse z e lungo l’asse x rispettivamente. Dunque le osservabili misurate sono S1z e
S1x che non commutano tra loro. Vediamo in dettaglio i due casi:
Esperimento I
Se supponiamo di misurare lo spin della particella 1 al tempo t0 (vedere Fig. 9.1),
SG z
1
2
π0
z
spin 1
spin 2
y
x
Figura 9.1: L’esperimento I. La particella 1 passa attraverso lo Stern e Gerlach
orientato lungo l’asse z (indicato con la grossa freccia) e subisce una deflessione
verso il basso mostrando che lo spin e’ up.
conviene descrivere lo stato del sistema in termini degli autostati di S1z e S2z . Dato che
lo stato iniziale delle due particelle (dopo il decadimento del π 0 ) ha spin 0, avremo
1
<
|ψ12
(I)i = √ (|u1 , d2 i − |d1 , u2 i)
2
(9.9)
dove, per esempio, la notazione |ui e’ un abbreviazione per |uiz . Se la misura da come
risultato che lo spin della particella 1 e’ up, allora lo spin della particella 2 al tempo t > t0 ,
cioe’ dopo la misura, sara’ down e lo stato corrispondente
|ψ2> (I)i = |d2 i
(9.10)
A questo punto il ragionamento secondo EPR va come segue. Dato che le due particelle,
dopo la disintegrazione del π 0 , non interagiscono piu’, lo stato della particella 2 deve essere
lo stesso prima e dopo la misura. Dunque prima della misura dovremmo avere
|ψ2< (I)i = |ψ2> (I)i = |d2 i
(9.11)
La matrice densita’ corrispondente sara’
ρ<
2 (I)
=
|ψ2< (I)ihψ2< (I)|
= |d2 ihd2 | =
117
0
1
0 1
=
0 0
0 1
(9.12)
Esperimento II
Dato che in questo caso si misura lo spin della particella 1 lungo l’asse x conviene espri-
SG x
2
1
spin 1
π0
spin 2
z
y
x
Figura 9.2: L’esperimento I. La particella 1 passa attraverso lo Stern e Gerlach
orientato lungo l’asse x (indicato con la grossa freccia) e subisce una deflessione
verso la direzione x mostrando che lo spin e’ orientato lungo −x.
mere lo stato di spin 0 delle due particelle nella base in cui sono diagonali S1x e S2x .
Indicheremo gli autostati nella direzione x con la notazione |uix = |+i e |dix = |−i. Lo
stato iniziale (dopo il decadimento) verra’ scritto nella forma
1
<
|ψ12
(II)i = √ (|+1 , −2 i − |−1 , +2 i)
2
(9.13)
Se ora si misura lo spin della particella 1 tramite lo Stern e Gerlach orientato lungo −x
(vedi Fig. 9.2) sappiamo che a t > t0 lo spin 2 sara’ orientato lungo +x e lo stato
corrispondente sara’
|ψ2> (II)i = |+2 i
(9.14)
ed usando l’argomento EPR abbiamo, come nel caso precedente, che questo sara’ anche lo
stato a t < t0 . Dunque
|ψ2< (II)i = |ψ2> (II)i = |+2 i
(9.15)
Per la matrice densita’ avremo
<
<
ρ<
2 (II) = |ψ2 (II)ihψ2 (II)|
(9.16)
Ricordiamo la relazione tra gli auto stati di Sx e Sz . Si ha
1
|±i = √ (|ui ± |di)
2
(9.17)
Pertanto
ρ<
2 (II)
1
1
= (|u2 i + |d2 i)(hu2 | + hd2 |) =
2
2
118
1
1
1 1
1
=
2
1 1
1 1
(9.18)
Come vediamo la matrice densita’ della particella 2 risulta essere diversa nei due diversi
esperimenti. Ma dato che abbiamo effettuato misure solo sulla particella 1 con nessuna
possibilita’ di interferenza con la particella 2, questo ci porta ad una contraddizione.
In questa discussione abbiamo usato il principio di realta’, perche’ la misura di S2z o
S2x fatta a t > t0 dara’ con certezza che lo spin 2 e’ down oppure orientato lungo +x,
quindi queste sono entrambe due proprieta’ oggettive del sistema. Abbiamo poi usato la
localita’ per asserire che queste proprieta’ oggettive a t > t0 lo sono anche per t < t0 dato
che le due particelle non interagiscono. Ma dato che le matrici densita’ della particella
2 sono diverse nei due casi, la deduzione alla EPR e’ che la teoria non e’ completa dato
che non e’ possibile associare alle proprieta’ oggettive che abbiamo determinato una unica
matrice densita’ od una unica funzione d’onda. Quindi queste proprieta’ non hanno una
controparte nella descrizione teorica. Vediamo che almeno una di queste proprieta’ e’ in
contrasto con la meccanica quantistica.
Mostriamo che, al contrario, i risultati dei due esperimenti qui esaminati sono in perfetto accordo con la Meccanica Quantistica ortodossa. A questo scopo occorre osservare
che se, in qualunque momento, noi chiediamo informazioni su una sola parte del sistema
(in questo caso lo spin della particella 2), questa va caratterizzata in termini della matrice
densita’ ridotta. Quindi, in entrambi i casi dovremo calcolare la matrice densita’ tracciata
sulla particella 1
<
ρ<
(9.19)
2 = Tr1 [ρ12 ]
Consideriamo ancora i due casi:
Esperimento I
In questo caso si ha
1
<
|ψ12
(I)i = √ (|u1 , d2 i − |d1 , u2 i)
2
(9.20)
e
<
<
ρ<
2 (I) = Tr1 [|ψ12 (I)ihψ12 (I)|] =
1h
=
hu1 | (|u1 , d2 i − |d1 , u2 i) (hu1 , d2 | − hd1 , u2 |) |u1 i +
2
i
+ hd1 | (|u1 , d2 i − |d1 , u2 i) (hu1 , d2 | − hd1 , u2 |) |d1 i =
1
1
1 1 0
=
(|u2 ihu2 | + |d2 ihd2 |) = I2 =
2
2
2 0 1
(9.21)
Esperimento II
Notiamo che lo stato iniziale
1
<
|ψ12
(II)i = √ (|+1 , −2 i − |−1 , +2 i)
2
119
(9.22)
e’ identico nel caso dell’esperimento I, salvo che e’ espresso nella base degli autostati di
Sx e si ottiene formalmente con le sostituzioni u → + e d → −. Dato che il calcolo di una
traccia non dipende dalla base scelta, possiamo calcolare la traccia parziale sugli autostati
di Sx e quindi otterremo un risultato analogo a quello di I:
1
1
1 1 0
<
ρ2 (II) = (|+2 ih+2 | + |−2 ih−2 |) = I2 =
(9.23)
2
2
2 0 1
Il risultato in termini di matrici 2 × 2 e’ identico al precedente, ma si potrebbe obiettare
che le due matrici sono espresse in basi diverse, ma occorre osservare che le due espressioni
astratte per la matrice ridotta mostrano che e’ proporzionale alla risoluzione dell’identita’
nelle due basi e quindi coincidono tra loro. Dunque abbiamo dimostrato che il risultato dei
due esperimenti, dal punto di vista della particella 2, e’ identico e che inoltre la matrice
densita’ descrive una miscela statistica. Questo si poteva intuire dal fatto che dopo la
misura la particella 2 viene proiettata in uno stato di spin definito e che quindi il risultato
di una serie di misure da’ il 50% delle volte −1/2 ed il restante 50% +1/2 quando la
particella 1 viene misurata avere rispettivamente spin 1/2 e −1/2.
Dunque la teoria ortodossa non da’ luogo a problemi. Rimane il fatto che dal punto di
vista EPR le tre proprieta’ di completezza, realismo e localita’ producono una inconsistenza. Una possibile via di uscita potrebbe essere una interpretazione statistica dei risultati.
Infatti il problema della correlazione tra osservabili esiste anche in meccanica classica. Per
esempio, nel decadimento di una particella si deve conservare l’impulso e quindi misurando l’impulso di una particella si conosce anche quello dell’altra. Ma questo significa
semplicemente che l’impulso della seconda particella e’ una proprieta’ oggettiva e non ci
porta in nessuna contraddizione perche’ comunque questa proprieta’ e’ effettivamente ben
definita a livello classico. Il problema in meccanica quantistica e’ che il ragionamento per
cui si puo’ estrapolare all’indietro il valore conosciuto cozza con il fatto che quella variabile
non ha un valore ben definito nello stato originario dato che si tratta di uno stato entangled. Ma questo suggerisce che forse e’ possibile concepire un modello di tipo statistico
in cui sia possibile assegnare un valore definito alle osservabili, ma le proprieta’ quantistiche derivano dal fatto che non conosciamo esattamente questi valori perche’ dipendono
da una variabile non osservata. Questi modelli prendono il nome di modelli di variabili
nascoste.
Nella Sezione successiva mostreremo un argomento di Bell che permette di distinguere
sperimentalmente tra teorie di variabile nascosta e meccanica quantistica e che i risultati
sperimentali prediligono la meccanica quantistica. Una successiva definizione di localita’
in Meccanica Quantistica ci mostrera’ che esiste effettivamente una non localita’ associata
alle misure di correlazione come quelle presenti nella discussione EPR.
Pertanto in Meccanica Quantistica delle tre proprieta’ richieste da EPR solo realismo
e completezza sono valide. Faremo anche vedere che la non localita’ non porta pero’ ad
una violazione del principio di causalita’ (la causa precede l’effetto).
120
9.2
Le teorie di variabili nascoste e la disuguaglianza di Bell
Le teorie di variabili nascoste sono di tipo classico, anche se con trattazione di tipo probabilistico nello stesso senso della meccanica statistica4 . Dunque valgono sia la completezza
che la realta’. Inoltre si assume la localita’ per non cadere in contraddizione con la teoria
della relativita’ ristretta. Ma nel 1964 John Bell sferro’ un duro colpo a queste teorie
perche’ mostro’ che qualunque teoria di variabile nascosta locale e’ incompatibile con la
meccanica quantistica.
Cominciamo con l’osservare che nell’esperimento descritto nella sezione precedente
esiste una chiara correlazione tra i risultati delle misure che vengono effettuate. Infatti
se l’osservatore 1 fa molte misure e trova i seguenti risultati risultati per lo spin dell’elettrone (+, +, −, +, −, −, · · · ), l’osservatore 2 misurera’ i seguenti spin del positrone
(−, −, +, −, +, +, · · · ). La correlazione e’ tale che i prodotti delle quantita’ misurate dai
due osservatori da’ come unico risultato −1. In effetti la correlazione dei risultati ottenuti in diverse misure e’ una quantita’ che si calcola facilmente in meccanica quantistica.
Bell suggeri’ dunque una generalizzazione dell’esperimento sugli spin che abbiamo discusso precedentemente: invece di orientare i rivelatori dell’elettrone e del positrone lungo la
stessa direzione, assunse una angolazione arbitraria tra i due rivelatori. Il primo rivelatore
misura la componente dello spin dell’elettrone lungo la direzione specificata dal versore ~a
mentre il secondo misura lo spin del positrone lungo quella specificata da ~b. La meccanica
quantistica permette di calcolare questa correlazione prendendo semplicemento il valor
medio dei prodotti (~σ1 · ~a)(~σ2 · ~b). Se per esempio, se facessimo una serie di 5 misure con
i risultati
e− e+ Prodotto
+1
+1
−1
+1
−1
−1
+1
+1
−1
−1
−1
+1
−1
−1
+1
(9.24)
il valor medio del prodotto delle proiezioni dei due spin lungo le direzioni ~a e ~b risulterebbe
1
1
(−1 + 1 − 1 − 1 + 1) = − = −0.2
5
5
(9.25)
D’altra parte noi sappiamo che il valor medio di un operatore e’ dato dal suo valore di
aspettazione sullo stato del sistema e dunque avremo per la correlazione spin-spin, P (~a, ~b)
P (~a, ~b) = hψ|(~σ1 ·~a)(~σ2 · ~b)|ψi = −hψ|(~σ1 ·~a)(~σ1 · ~b)|ψi = −hψ|(~a · ~b)|ψi = − cos θab (9.26)
4
La meccanica statistica tratta sistemi con un gran numero di gradi di liberta’. Questo comporta, di fatto, l’ignoranza sulle condizioni iniziali del sistema. A questo si ovvia sostituendo alla
conoscenza dei dati iniziali dello stato del sistema una funzione di probabilita’ che caratterizzi i
possibili stati iniziali
121
Nel primo passaggio abbiamo usato il fatto che |ψi e’ uno stato di spin 0 e quindi
1 ~
~2 |ψi = (~σ1 + ~σ2 ) |ψi = 0
S1 + S
(9.27)
2
dunque
~σ1 |ψi = −~σ2 |ψi
(9.28)
Nel secondo passaggio abbiamo usato l’algebra delle matrici di Pauli
σi σj = δij + iijk σk
(9.29)
(~σ · ~a)(~σ · ~b) = ~a · ~b + i(~a ∧ ~b) · ~σ
(9.30)
da cui
ed il fatto che nello stato di singoletto il valore di aspettazione di qualunque componente
di ~σ e’ nullo
hψ|~σ1 |ψi = 0
(9.31)
Infine essendo ~a e ~b due vettori unitari il loro prodotto scalare e’ semplicemente il coseno
dell’angolo compreso θab . Dunque la correlazione spin-spin quantistica e’
P (~a, ~b) = − cos θab
(9.32)
Consideriamo ora una teoria di variabili nascoste. Prenderemo in esame solo il caso di
una singola variabile nascosta e che supporremo continua. Tutto l’argomento seguente si
puo’ pero’ estendere facilmente al caso di piu’ variabili che possono essere sia continue che
discrete. Supponiamo dunque che lo stato completo del sistema elettrone-positrone sia
caratterizzato da una variabile nascosta λ in maniera per noi incontrollabile. Supponiamo
inoltre che il risultato della misura fatta sull’elettrone sia indipendente dall’orientazione ~b
del rivelatore del positrone. Infatti essa potrebbe essere scelta dall’osservatore situato dalla
parte del positrone appena prima che venga effettuata la misura sull’elettrone, troppo tardi
quindi perche’ un qualsiasi segnale a velocita’ inferiore a quella della luce possa tornare
indietro al rivelatore dell’elettrone. L’ipotesi e’ che le predizioni delle misure delle due
orientazioni di spin siano date da funzioni A(~a, λ) e B(~b, λ). Il fatto che queste funzioni
dipendano solo da uno dei vettori ~a o ~b e’ appunto l’ipotesi di localita’. Inoltre queste
funzioni possono assumere solo i valori ±1:
A(~a, λ) = ±1;
B(~b, λ) = ±1
(9.33)
Inoltre sappiamo che quando i rivelatori sono allineati i risultati sono perfettamente
anticorrelati, e dunque dovremo avere
A(~a, λ) = −B(~a, λ)
(9.34)
per ogni valore di λ. In questa teoria il valor medio del prodotto dei risultati delle due
misure e’ dato da
Z
Z
~
~
P (~a, b) = dλP(λ)A(~a, λ)B(b, λ) = − dλP(λ)A(~a, λ)A(~b, λ)
(9.35)
122
dove la funzione P(λ) e’ la probabilita’ statistica che compete ad ogni valore di λ5 e dunque
Z
P(λ) ≥ 0, ∀λ,
dλP(λ) = 1
(9.36)
Consideriamo ora un terzo versore ~c e la differenza
Z
h
i
P (~a, ~b) − P (~a, ~c) = − dλP(λ) A(~a, λ)A(~b, λ) − A(~a, λ)A(~c, λ)
(9.37)
Usando
A(~b, λ)2 = 1
(9.38)
possiamo riscrivere
P (~a, ~b) − P (~a, ~c) = −
Z
h
i
dλP(λ)A(~a, λ)A(~b, λ) 1 − A(~b, λ)A(~c, λ)
(9.39)
Notiamo che
−1 ≤ A(~a, λ)A(~b, λ) ≤ +1
h
i
P(λ) 1 − A(~b, λ)A(~c, λ) ≥ 0
(9.40)
(9.41)
Prendendo allora il modulo della (9.39) si ha
Z
h
i
~
|P (~a, b) − P (~a, ~c)| = dλP(λ)A(~a, λ)A(~b, λ) 1 − A(~b, λ)A(~c, λ) ≤
Z
h
i
≤ dλP(λ) 1 − A(~b, λ)A(~c, λ)
(9.42)
Dunque
|P (~a, ~b) − P (~a, ~c)| ≤ 1 + P (~b, ~c)
(9.43)
Questa e’ la famosa disuaglianza di Bell: vale per qualunque teoria di variabile nascosta
locale soggetta solo alle condizioni delle equazioni (9.33) e (9.34). Ricordiamo ancora che
non sono state fatte assunzioni ne’ sulla densita’ di probabilita’ P(λ) ne’ sulla natura
della variabile nascosta λ. Si puo’ anche mostrare che lo stesso risultato e’ valido per un
numero arbitrario di variabili nascoste. E’ facile mostrare che la predizione della meccanica
quantistica e’ incompatibile con la disuguaglianza di Bell. Supponiamo per esempio che
tutti e tre i vettori ~a, ~b, ~c giacciano in un piano e che ~c formi un angolo di 450 sia con ~a sia
con ~b (e quindi θab = 900 ); in questo caso, il risultato della meccanica quantistica e’:
P (~a, ~b) = 0,
da cui
1
P (~a, ~c) = P (~b, ~c) = − √ ≈ − 0.707
2
1
|P (~a, ~b) − P (~a, ~c)| = √ ≈ 0.707,
2
1
1 + P (~b, ~c) = 1 − √ ≈ 0.293
2
(9.44)
(9.45)
5
Se λ e’ discreta questa formula equivale a fare la media pesata delle varie misure, con il
peso wi che corrisponde della probabilita’ che si realizzi il valore λi per λ. Cioe’ P (~a, ~b) =
P
a, λi )B(~b, λi )
i wi A(~
123
palesemente in contrasto con la disuguaglianza di Bell.
Dunque se il mondo microscopico si potesse spiegare con una opportuna teoria di
variabile nascosta, la disuguaglianza di Bell sarebbe valida e la meccanica quantistica
sarebbe sbagliata. Se invece la MQ e’ corretta allora non c’e’ alcuna teoria di variabile
nascosta che ci potra’ venire in soccorso per salvarci dai problemi sollevati da EPR.
D’altra parte Bell ci offre, con la sua disuguaglianza, la possibilita’ di verificare quale
delle due teorie sia corretta.
Sono stati effettuati molti esperimenti negli anni 60 e 70 per mettere alla prova la
disuguaglianza di Bell, culminati nel lavoro di Aspect, Grangier e Roger. A dire il vero
loro usarono transizioni atomiche a due fotoni e non decadimento di pioni ma la trattazione
teorica non differisce dal caso di spin 1/2 qui analizzato. Per escludere la possibilita’ che
i due rivelatori fossero sensibili alle loro posizioni reciproche, le due orientazioni furono
fissate a caso dopo che i fotoni erano gia’ in volo. I risultati furono in ottimo accordo con
le predizioni della MQ e incompatibili con la disuguaglianza di Bell.
La conferma sperimentale della MQ arrivo’ come una sorta di mazzata sulla comunita’ scientifica. Infatti dimostrava che la natura in se’ e’ fondamentalmente non locale.
Infatti se vogliamo credere alla meccanica quantistica non possiamo non pensarla come
una teoria completa. Altrimenti la dovremmo considerare solo una teoria fenomenologica.
Analogamente e’ difficile abbandonare il principio di realta’. Questo abbandono significa
ammettere che la funzione d’onda non e’ una proprieta’ del sistema ma e’ solo un oggetto
matematico che ci permette di prevedere alcune caratteristiche del sistema, ma non lo
descrive in modo completo. L’unica alternativa appare essere l’abbandono dell’idea di localita’. Evidentemente nella interpretazione di Copenhagen questa idea e’ implicitamente
abbandonata, dato che la localita’ fa a cozzi con la riduzione del pacchetto d’onda. Infatti, la non localita’ nella forma del collasso istantaneo della funzione d’onda era stata
da sempre una caratteristica dell’interpretazione ortodossa, ma prima degli esperimenti di
Aspect era ancora possibile sperare che la non localita’ quantistica fosse in qualche modo
un artefatto privo di significato. Tale speranza risulta ormai priva di fondamento e siamo
obbligati a riesaminare la nostra avversione alla non localita’. Perche’ l’idea stessa di
influenze superluminali provoca cosi’ tanto allarme fra i fisici? Dopo tutto ci sono molte
cose che viaggiano piu’ velocemente della luce. Se una pulce attraversa un fascio di luce
di un proiettore la velocita’ della sua ombra e’ proporzionale alla distanza dallo schermo:
in linea di principio tale distanza puo’ essere grande quanto si vuole e quindi l’ombra
puo’ muoversi con velocita’ arbitrariamente grande. L’ombra pero’ non trasporta alcuna
energia e non puo’ trasmettere alcun messaggio da un punto all’altro dello schermo.
D’altra parte, un influsso causale che si propagasse piu’ velocemente della luce implicherebbe conseguenze inaccettabili. Infatti, secondo la teoria della relativita’ speciale
esistono sistemi di riferimento inerziali in cui un tale segnale si potrebbe propagare all’indietro nel tempo con l’effetto che precederebbe la causa e cio’ darebbe luogo ad anomalie
logiche senza via di scampo. La domanda e’: gli influssi superluminali previsti dalla MQ
e messi in evidenza in modo concreto dagli esperimenti di Aspect sono in accordo o meno
124
con il principio di causalita’6 ?
Consideriamo ancora l’esperimento del decadimento del π 0 . La misura sull’elettrone
influenza il risultato che si ottiene nella misura sul positrone? Certo che si’ altrimenti non
potremmo spiegare la correlazione fra i dati. Ma possiamo dire che la misura sull’elettrone
causi un particolare effetto sulla misura del positrone? No, in nessun senso comune della
parola.
Infatti l’osservatore dalla parte del positrone non e’ in grado di sapere il risultato della
misura dello spin sino al momento in cui la compie. Lo puo’ sapere solo se l’osservatore
dell’elettrone gli comunica (con velocita’ inferiore o pari a quella della luce) il valore della
sua misura. Chi guarda il positrone ha accesso solo ai dati dalla sua parte dell’esperimento,
non puo’ dire se la misura sull’elettrone sia stata effettuata o no, dato che le due liste di
dati compilate dalle due parti dell’esperimento, se prese separatamente, sono del tutto
casuali. E’ solo quando le si confrontano che si scoprono le notevoli correlazioni.
Dunque l’unica manifestazione della non localita’ quantistica sta nella correlazione tra
due liste di dati del tutto casuali se presi singolarmente e non produce alcuna violazione
della causalita’. Daremo, successivamente, una dimostrazione di questo fatto.
È interessante sapere che il teorema di Bell può essere dimostrato assumendo semplicemente che lo spazio delle fasi classico e’ costituito da un insieme di punti . Pertanto le
operazioni logiche ammissibili su questi insiemi sono quelle classiche di unione ed intersezione. Dato che le operazioni logiche ammiseibili in uno spazio vettoriale vanno definite in
altro modo, si deduce che la distinzione tra fisica classica e meccanica quantistica è dovuta
alla diversa struttura dello spazio delle fasi.
9.3
Località
Come abbiamo visto nella discussione EPR della Sezione 9.2, le ipotesi di localita’, realismo e completezza sono contraddittorie tra di loro. Cercheremo adesso di definire la
localita’ in un modo che non coinvolga elementi al di fuori della Meccanica Quantistica.
Consideriamo allora (come nel caso EPR) due sistemi S1 e S2 entangled tra di loro e che
siano separati spazialmente in modo da non avere piu’ interazioni. I due sistemi, ad un
istante t0 , successivo al loro disaccoppiamento, interagiscono con due apparati di misura
X e Y completamente disaccoppiati (vedi Fig. 9.3). Diremo che il principio di localita’
e’ soddisfatto se la misura di una osservabile Q1 del sistema S1 fatta da X non
influisce sulle misure di osservabili di S2 fatte da Y. L’hamiltoniana che descrive
il sistema dal tempo t0 in poi sara’
H = H1 + H2 ,
H1 = K1 + KX + V1X ,
H2 = K2 + KY + V2Y
(9.46)
dove K1,2 sono le hamiltoniane relative a S1 e S2 rispettivamente ed analogamente per
KX,Y . I termini V1X e V2Y descrivono l’interazione tra gli apparati di misura X e Y
6
Il principio di causalita’ dice in sostanza che l’effetto non puo’ precedere la causa
125
entangled states
S1
S2
X
Y
Figura 9.3: I sistemi entangled S1 , S2 e gli apparati di misura X, Y , come descritti
nel testo discusse nel testo.
rispettivamente con S1 e S2 . E’ importante osservare che dopo il tempo t0 non ci sono
interazioni tra i sistemi (S1 , X) e (S2 , Y ) e quindi l’hamiltoniana H e’ separabile:
[H1 , H2 ] = 0
(9.47)
Corrispondentemente l’operatore di evoluzione fattorizza
U = U1 U2 ,
/
Ui = e−i(t − t0 )Hi /h
(9.48)
Lo stato a t0 e’ descritto da una matrice densita’
ρ0 = ρ0S ⊗ ρ0X ⊗ ρ0Y
(9.49)
dove ρ0S e’ la matrice densita’ per gli stati entangled S1 e S2 . Supponiamo adesso di
misurare una osservabile Q1 del sistema S1 , tramite l’apparato di misura X al tempo
t > t0 . Avremo
h
i
h
i
h
i
hQ1 i = Tr [Q1 ρ] = Tr Q1 U1 U2 ρ0 U2† U1† = Tr U2† Q1 U1 U2 ρ0 U1† = Tr U1† Q1 U1 ρ0 (9.50)
dove abbiamo usato ripetutamente la proprieta’ ciclica della traccia e la commutativita’
di U2 con U1 e Q1 . Come si vede, dal calcolo e’ sparita la dipendenza da U2 e quindi
dall’apparato di misura Y che appare solamente nella ρ0Y . Questo significa che lo stato
dell’apparato di misura Y non viene toccato da misure fatte su osservabili di S1 .
Il discorso e’ diverso per le misure di correlazione che dipendono da osservabili che
stanno nel prodotto diretto dei due spazi di Hilbert e saranno di tipo Q1 ⊗ Q2 e che hanno
un carattere non-locale. Il teorema di Bell ci dice che questa non-localita’ non puo’ essere
riprodotta da teorie di variabili nascoste locali.
126
In definitiva la riduzione del pacchetto non provoca problemi su questo fronte. Vedremo
pero’ che questa non e’ la fine della storia, perche’ questa ipotesi appare come una ipotesi
ad hoc che si applica solo al momento della misura effettuata con apparati macroscopici.
D’altra parte anche l’apparato di misura e’ fatto di elementi microscopici ed in linea
di principio lo si potrebbe descrivere in termini di meccanica quantistica. Dunque se la
meccanica quantistica e’ corretta e’ naturale porsi la domanda se la riduzione del pacchetto
puo’ essere dedotta dalla meccanica quantistica stessa. Se cosi’ non fosse, come vedremo,
saremmo portati a dover considerare seriamente un altro paradosso che e’ quello del gatto
di Schrödinger. Ed e’ appunto questa analisi che faremo nel capitolo successivo.
127
Capitolo 10
La misura in Meccanica
Quantistica
Il concetto di misura in Meccanica Quantistica e’ qualcosa di profondamente diverso da
quello della Meccanica Classica. In quest’ultimo caso noi sappiamo, a priori, che una
quantita’ che si vuole misurare in un determinato sistema ha un valore ben definito e che,
tramite una misura ideale1 e’ possibile determinare quel valore. Al contrario, nel caso
della Meccanica Quantistica, il valore della osservabile che vogliamo misurare, prima della
misura, non e’ definito. Come sappiamo, questo valore puo’ essere uno qualunque degli
autovalori dell’osservabile. Quello che fa l’operazione di misura e’ di proiettare lo stato del
sistema nell’autostato dell’osservabile che corrisponde al valore misurato. Solo dopo questa
procedura di preparazione dello stato conosciamo a priori il valore dell’osservabile, cioe’
prima di una ulteriore misura della stessa osservabile, infatti in questo caso la probabilita’
di ottenere proprio quel valore e’ pari ad 1. Vediamo che in Meccanica Quantistica e’
importante distinguere tra due processi (sebbene entrambi costituiscano una procedura
di misura), la preparazione e la misura vera e propria. Nella preparazione si ottiene
uno stato con proprieta’ definite rispetto all’osservabile che si misura, ma in generale lo
stato cosi’ ottenuto non ha proprieta’ definite rispetto ad altre osservabili (in particolare
quelle che non commutano con la nostra osservabile). Possiamo dire che il processo di
preparazione e’ contestuale rispetto alla particolare osservabile di riferimento. Notiamo
che in Meccanica Classica si assume invece che in un dato sistema tutte le osservabili
abbiano un valore ben definito.
Possiamo esemplificare con una particella di spin 1/2 che si voglia preparare in uno
/ /2. Questo puo’ essere fatto usando un apparato di
stato di sz definito, per esempio +h
Stern-Gerlach con un campo magnetico orientato lungo l’asse z. Noi sappiamo che i due
/ /2 vengono separati. Bloccando il fascio con sz = −h
/ /2 otteniamo un
fasci con sz = ±h
fascio di particelle aventi tutte la polarizzazione desiderata. Ovviamente le particelle cosi’
1
In MC per misura ideale si intende una misura eseguita con una indeterminazione che puo’
essere resa piccola a piacere. Cioe’ e’ una misura che non perturba il sistema, o comunque lo
perturba molto poco e al di sotto della precisione che si vuole realizzare nell’esperimento.
128
preparate non hanno piu’ un valore definito di sx . Infatti sappiamo che se si misura sx si
/ /2 che sx = −h
/ /2, ognuno con probabilita’ 1/2.
puo’ ottenere come risultato sia sx = +h
Dunque la preparazione corrisponde a selezionare uno stato particolare del sistema
sottoponendolo ad una determinata procedura di misurazione. Nel processo di misura
quantistico noi chiediamo al sistema il valore dell’osservabile. Dunque il risultato della
misura non e’ controllabile in alcun modo da parte dello sperimentatore. Nel caso classico
la misura ci dice qual’e’ il valore dell’osservabile misurata in un dato stato. Supponiamo
adesso che, prima della misura, il sistema si trovi in una sovrapposizione di autostati
dell’osservabile Ω che vogliamo misurare
X
|ψi =
ck |ωk i
(10.1)
k
Se il risultato della misura e’ ωk , dopo la misura lo stato verra’ proiettato nel corrispondente autostato
|ψi → |ωk i
(10.2)
Si puo’ dimostrare che, eccetto il caso in cui |ψi sia un autostato di Ω, non esiste nessun
operatore unitario che connetta i due stati, cioe’
Uk |ψi =
6 |ωk i,
Uk† Uk = I
(10.3)
|ψi → Pk |ψi
(10.4)
Infatti i due stati sono connessi dal proiettore
Pk = |ωk ihωk |,
che e’ un operatore con autovalori 0, 1 e quindi non invertibile, eccetto sul sottospazio
corrispondente all’autovalore 1, vale a dire sul sottospazio appartenente all’autovalore
ωk . Dunque l’evoluzione che subisce lo stato |ψi durante il processo di misura non puo’
coincidere con l’evoluzione temporale prevista dall’equazione di Schrödinger che e’ una
evoluzione prodotta da un operatore unitario.
Possiamo riformulare quanto abbiamo detto in termini della matrice densita’. Consideriamo questa matrice prima della misura
X
X
ρprima = |ψihψ| =
|ci |2 |ωi ihωi | +
ci c∗j |ωi ihωj |
(10.5)
i
i6=j
Se vogliamo ottenere un risultato ben definito dalla misura occorre che i termini misti si
annullino e che soppraviva solo il termine
X
ρdopo =
|ci |2 |ωi ihωi |
(10.6)
i
La matrice densita’ si deve ridurre ad una miscela statistica il cui significato e’ che avremo
una probabilita’ pari a |ci |2 per ottenere come risultato ωi . Ovviamente non esiste un
129
operatore unitario che possa svolgere questa funzione. A tale scopo dobbiamo operare con
operatori di proiezione e le due matrici sono connesse dalla seguente operazione
X
ρprima → ρdopo =
Pi ρprima Pi ,
Pi = |ωi ihωi |
(10.7)
i
Questa operazione prende il nome di postulato di proiezione e la miscela statistica che
si ottiene si chiama miscela di Lüders. Ad esempio consideriamo uno spin 1/2 e partiamo
dallo stato
|ψi = c+ |+i + c− |−i
(10.8)
Per calcolare la proiezione
X
Pi ρprima Pi =
X
i
Pi |ψihψ|Pi
(10.9)
i
notiamo che
P+ |ψi = c+ |+i,
P− |ψi = c− |−i
(10.10)
ed usando l’hermiticita’ degli operatori di proiezione si trova
ρdopo = |c+ |2 |+ih+| + |c− |2 |−ih−|
(10.11)
Nella interpretazione di Copenhagen, la riduzione del vettore di stato si verifica allorche’ si misuri un’osservabile. Dato che alla fine il risultato della misura deve arrivare all’osservatore si assume che gli apparati usati, od almento gli indici che danno la misura stessa,
siano apparati macroscopici. Pertanto il postulato del collasso significa letteralmente che il
collasso si verifica allorche’ si effettui una misura con un apparato macroscopico. E’ questa
affermazione che fino ad ora non ha mai avuto smentite sperimentali. E’ chiaro pero’ il
problema interpretativo dato che qualunque apparato macroscopico puo’ essere analizzato
nei suoi componenti microscopici, atomi etc. Pertanto il processo di misura stessa puo’
essere, in linea di principio, analizzato in termini quantistici. Ma se cosi fosse il collasso
dovrebbe seguire automaticamente da questa analisi. Altrimenti la meccanica quantistica
cosi come e’ formulata mancherebbe di qualche elemento. Il problema principale e’ che,
se ignoriamo il collasso, la meccanica quantistica e’ perfettamente deterministica, dato
che l’equazione di Schrödinger permette di conoscere completamente il vettore di stato a
qualunque istante, una volta che sia assegnato ad un istante iniziale. Invece il collasso e’
un fenomeno assolutamente non deterministico, poiche’ la funzione d’onda puo’ collassare
con diverse probabilita’ in diversi vettori di stato senza nessuna possibilita’ di previsione
a priori. In altri termini, la formulazione della Meccanica Quantistica, nella sua interpretazione alla Copenhagen, prevede due distinte evoluzioni temporali. Una che avviene
attraverso l’equazione di Schrödinger tramite un operatore di evoluzione unitario ed una,
al momento della misura, che si postula avvenire attraverso un processo non unitario, cioe’
la riduzione o il collasso del vettore di stato. Il primo a formalizzare in questo senso il
problema della misura fu Von Neumann nel 1932. D’altra parte egli si rese conto che
non era possibile giustificare quantisticamente il fenomeno del collasso e questo lo porto’
130
ad introdurre la coscienza dell’osservatore come elemento atto a produrre tale fenomeno.
Con le parole di Von Neumann la coscienza individuale dovrebbe costituire un fenomeno
extra-osservazionale, quindi non riducibile a termini fisici.
Ci sono proposte diverse per uscire da questa situazione, in particolare aggiungendo
ulteriori elementi alla meccanica quantistica. In questo corso prenderemo una strada piu’
tradizionale che e’ quella di cercare di risolvere il problema del collasso nell’ambito stesso
della meccanica quantistica. Ora e’ evidente che e’ impossibile descrivere un fenomeno
non deterministico nell’ambito di una teoria completamente deterministica. Dunque se
una soluzione esiste, questa puo’ essere solo una soluzione di tipo efficace, cioe’ dovra’
essere una soluzione deterministica ma che a tutti gli effetti pratici si comporta come
non deterministica. Una tale situazione e’ chiamata in inglese FAPP (For All Practical
Purposes). Vedremo che la teoria della decoerenza e’ proprio di questo tipo, cioe’ se
si misura una certa osservabile, in un tempo assolutamente trascurabile (detto tempo
di decoerenza) il sistema viene a trovarsi nell’autostato dell’osservabile corrispondente
all’autovalore misurato.
Quello che fa la teoria della decoerenza e’ di introdurre uno spazio di Hilbert piu’
grande che comprende, oltre ai gradi di liberta’ del sistema in esame, anche i gradi di
liberta’ dell’ambiente esterno che, inevitabilmente interagisce con il sistema. In questo
spazio allargato l’evoluzione avviene in modo deterministico tramite un operatore unitario,
ma quando restringiamo la nostra osservazione al sistema dobbiamo rivolgere la nostra
attenzione allo spazio di Hilbert originario. Ma un operatore unitario in uno dato spazio
non e’ necessariamente unitario in un sottospazio. In questo modo viene evitato l’impasse
della doppia evoluzione temporale.
Le interazioni dei gradi di liberta’ macroscopici dell’apparato di misura (per esempio
la posizione di un indice su una scala di misura) con i gradi di liberta’ microscopici dell’apparato stesso ed eventualmente con i gradi di liberta’ che descrivono l’ambiente circostante
generano un fenomeno dissipativo per cui i gradi di liberta’ macroscopici cedono energia
agli altri gradi di liberta’. Per esempio, un indice viene regolato da una molla che col passare del tempo tende a ritornare nella posizione originaria a causa degli attriti. Quello che
succede in modo abbastanza generale e’ che il tempo di decoerenza risulta proporzionale al
tempo di dissipazione (il tempo caratteristico dei processi di attrito) con un coefficiente di
proporzionalita’ estremamente piccolo. Dunque anche per fenomeni dissipativi molto lenti
(e quindi con tempi di dissipazione lunghi) il tempo di decoerenza e’ piccolissimo e praticamente non misurabile. Recentemente sono stati fatti degli esperimenti in cui l’apparato
di misura e’ simulato da sistemi mesoscopici2 . Per esempio, un sistema con un numero
piccolo di fotoni, dell’ordine di 5-10, puo’ essere considerato mesoscopico. In questi sistemi
il tempo di decoerenza e’ sufficientemente grande per poterlo misurare. Ebbene i risultati
sperimentali sono molto confortanti, dato che confermano in pieno l’aspettativa teorica.
L’argomento e’ ancora sotto discussione, ma certamente quella della decoerenza e’ una
2
Un sistema mesoscopico e’ in qualche modo al limite tra un sistema quantistico ed un sistema
classico
131
soluzione brillante del problema ed inoltre, almeno in certe situazioni limite, puo’ ricevere
una adeguata conferma sperimentale.
10.1
Sistema e apparato di misura
Introdurremo qui il concetto di misura pensata come ad una interazione tra due sistemi,
che soddisfano entrambi la meccanica quantistica. Inizieremo con una semplice schematizzazione. Precisamente, considereremo un sistema fisico S in un dato stato quantico. S
e’ il sistema sul quale vogliamo misurare una data osservabile OS . La misura viene eseguita tramite un altro sistema fisico A (apparato di misura) che coinvolge degli elementi
macroscopici. In particolare si suppone che A sia un sistema macroscopico e quindi il
suo comportamento sara’ ben descritto in termini di fisica classica. Pero’ A e’ esso stesso
costituito da elementi microscopici che descriveremo in termini quantistici. Ovviamente il
comportamento classico riflettera’ quello quantistico sulla base del teorema di Ehrenfest.
La misura risulta dunque in un processo di interazione tra sistema fisico S ed apparato
di misura A entrambi descritti quantisticamente. La dinamica del sistema complessivo
puo’ essere formulata in termini del prodotto tensoriale dei due spazi di Hilbert HS e HA ,
HS ⊗ HA . Finche’ non interviene l’interazione, che supporremo essere presente solo per un
certo intervallo di tempo, il sistema S e’ descritto da una hamiltoniana HS e da uno stato
|ψi ∈ HS . Analogamente l’apparato di misura e’ descritto da una hamiltoniana HA e da
uno stato |φi ∈ HA . L’osservabile OS che vogliamo misurare agisce sullo spazio HS e, per
semplicita’, assumeremo che non sia degenere. Il sistema totale, prima dell’interazione, e’
soggetto alla somma delle due hamiltoniane (commutanti tra loro), HS e HA
H0 = HS + HA
(10.12)
Quando interviene l’interazione l’hamiltoniana sara’ data da
H = H0 + HI
(10.13)
con HI il termine che rappresenta l’interazione tra S e A. Quando l’interazione termina,
il sistema sara’ ancora descritto da H0 .
Al fine di mostrare che questa descrizione e’ possibile considereremo un tipo di interazione estremamente semplice introdotta da Von Neumann. Supponiamo che l’apparato di
misura contenga un quadrante graduato ed un puntatore, come illustrato in Figura 10.1.
La posizione del puntatore sara’ individuata dagli autovalori di un operatore di posizione
X. Assumeremo che prima dell’interazione il puntatore sia nella sua posizione di equilibrio b0 . A causa dell’interazione il puntatore si spostera’ sulla posizione b1 e li rimarra’.
Quindi prima e dopo l’interazione X e’ una costante del moto e pertanto commuta con
l’hamiltoniana H0 . Prima della misura potremo rappresentare lo stato del sistema A con
una funzione d’onda del tipo
φ(x, y) = η(x)χ(y)
(10.14)
132
Figura 10.1: Un apparato di misura costituito da un quadrante ed un puntatore.
con la funzione η(x) che descrive una gaussiana molto stretta centrata sulla posizione
del puntatore a riposo, b0 , che assumeremo corrispondere all’ autovalore x = 0 di X.
Le variabili y sono tutte le altre variabili necessarie per descrivere l’apparato di misura
M che pero’ giocano un ruolo del tutto accessorio in questa discussione e che quindi
ignoreremo. Dunque la funzione d’onda di M puo’ essere semplificata ed assunta essere
φ(x). Assumeremo di misurare una osservabile OS del sistema.
In genere la misura avviene facendo interagire per un certo tempo l’apparato di misura
ed il sistema e separandoli prima e dopo la misura. Assumeremo quindi che la misura
abbia luogo nell’intervallo temporale (−, +) e che per effetto della misura il puntatore si
sposti dalla posizione di riposo alla posizione b1 corrispondente all’autovalore x = x1 di X.
Un modo molto semplice per caratterizzare questa interazione e’ di scrivere la seguente
hamiltoniana
HI (t) = −g(t)P OS
(10.15)
con
g(t) = g per − ≤ t ≤ +,
g(t) = 0, altrimenti
(10.16)
P l’operatore in HA coniugato canonicamente a X, cioe’
/
[X, P ] = ih
(10.17)
Se prendiamo l’intervallo temporale sufficientemente piccolo e supponiamo che l’interazione sia sufficientemente grande da essere dominante rispetto ad H0 possiamo risolvere
l’equazione del moto per l’operatore di evoluzione nell’intervallo temporale della misura
/
ih
dU (t)
= H(t)U (t)
dt
(10.18)
/ ). Per − ≤ t ≤ Per t ≤ − si ha H = H0 si ha U (t) = exp(−iH0 t/h
/
ih
dU (t)
= −gP OS U (t)
dt
(10.19)
che puo’ essere integrata con il risultato
/
U () = eiλP OS /h
133
(10.20)
dove abbiamo definito
λ = 2g
(10.21)
e, dato che stiamo considerando la sola evoluzione connessa con l’interazione abbiamo
assunto U = 1 prima di −. Supponendo che prima della misura il sistema si trovi in un
autostato |ψi = |ok i di OS , quando agiamo con l’ operatore di evoluzione sulla funzione
d’onda di S e A, |ψi ⊗ |φi, l’operatore OS assume il valore ok e quindi sullo stato |φi
avremo
/
eiλP/h φ(x) = eλok d/dx φ(x)
(10.22)
Ma
eλok d/dx φ(x) =
∞
X
(λok )n dn
φ(x) = φ(x + λok )
n! dxn
(10.23)
n=0
Dunque
/
eiλP OS /h φ(x) = φ(x + λok )
(10.24)
Vediamo che dopo la misura il puntatore sara’ nella posizione corrispondente al valore
x1 = λak . Il fatto che la misura correli la posizione dell’indice con l’autovalore misurato
e’ la condizione essenziale della misura.
Per descrivere in maniera piu’ accurata l’operazione di misura che abbiamo esemplificato seguendo Von Neumann, introduciamo alcuni concetti correlati all’ apparato di
misura. Distingueremo tra le seguenti parti di A
• Metro. La parte dell’apparato che interagisce direttamente con il sistema che si
misura.
• Amplificatore. Trasforma l’input microscopico nel segnale macroscopico.
• Puntatore. E’ l’indice o il contatore sul quale si legge il risultato della misura.
Supponiamo allora di voler misurare un’osservabile OS del sistema S, con autovalori ok , con
l’apparato di misura A. Mantenendo le stesse notazioni del caso precedente, indicheremo
con HA lo spazio di Hilbert che descrive le posizioni del puntatore in termini di autostati
|ak i i cui autovalori ak danno appunto le posizioni del puntatore che dovranno essere in
corrispondenza biunivoca con i valori ok che assume l’osservabile OS . Introdurremo poi
lo spazio di Hilbert HS che descrive il sistema che intendiamo misurare. Lo stato iniziale
del sistema sara’ assunto essere
X
|ψ(0)i =
cj |oj i
(10.25)
j
Chiaramente dovremo accoppiare l’apparato A e il sistema S in modo che ci sia, come
abbiamo visto nel caso di Von Neumann, una corrispondenza biunivoca tra i valori ok
dell’osservabile OS che stiamo misurando, e le posizioni dell’indice. Inoltre lo stato che
otterremo allo spegnimento dell’accoppiamento dovra’ anche essere tale che la probabilita’
134
di ottenere come risultato della misura un certo valore oj sia ancora |cj |2 . Questo accoppiamento sara’ dovuto ad una hamiltoniana di interazione tra il sistema e l’apparato di
misura, HSA , con un corrispondente operatore di evoluzione USA (t). Assumeremo anche
che HSA sia della forma
HSA = gOA ⊗ OS
(10.26)
dove g e’ la costante di accoppiamento che supporremo sufficientemente grande per poter
trascurare le hamiltoniane di S e di A durante l’interazione. Supponiamo che lo stato
iniziale sia dato da
|ψSA (0)i = |ψ(0)i ⊗ |A(0)i
(10.27)
con |A(0)i corrispondente allo stato di riposo dell’indice dello strumento di misura |a0 i =
|A(0)i. Applicando l’interazione per un certo tempo τ , vorremmo ottenere il seguente
risultato
X
|ψSA (τ )i = USA (τ )|ψ(0) ⊗ |ai0 i =
(10.28)
cj eiφj |oj i ⊗ |aj i
j
Infatti, se vogliamo che la misura abbia senso, i coefficienti cj dovranno essere gli stessi
dello stato iniziale del sistema, salvo un fattore di fase che pero’ non altera le probabilita’.
Notiamo anche che per preparare in questo modo lo stato al tempo τ occorrera’, in generale, scegliere opportunamente l’istante τ stesso. In questo modo si realizza una perfetta
correlazione tra sistema ed apparato di misura. Notiamo che uno stato del tipo |ψSA (τ )i
e’ uno stato entangled. Questo significa che per realizzare il risultato desiderato e’ necessario considerare una sovrapposizione quantistica degli stati (macroscopici) dell’apparato
di misura che, come vedremo successivamente, porta a risultati classicamente paradossali.
Faremo adesso un esempio molto semplice su come sia possibile realizzare una situazione di questo tipo, considerando un sistema S e, invece dell’intero apparato A, il metro M
entrambi a due livelli. Indicando con HM lo spazio di Hilbert relativo al metro, il generico
stato composto sara’ dato da una sovrapposizione di stati del tipo,
|±, ±i = |±iS ⊗ |±iM
(10.29)
Scegliamo come osservabile da misurare sul sistema
OS = σzS
(10.30)
Il metro avra’ due posizioni corrispondenti agli stati up e down del sistema. Lo caratterizzeremo in termini di autostati dell’operatore σzM . Supporremo allora che il metro sia
nella posizione iniziale corrispondente all’autovalore down
|M (0)i = |−iM
(10.31)
Dunque, se lo spin di S sara’ down al termine dell’interazione, il metro dovra’ rimanere
nella posizione down, mentre se diventera’ up, anche il metro dovra’ essere nello stato up.
Assumiamo poi come hamiltoniana di interazione
HSM = g(1 + σzS )σxM
135
(10.32)
dove notiamo che, come nel caso di Von Neumann, l’operatore in A, σxM , che entra in HSM
non commuta con σzM che fornisce la posizione del puntatore mentre (1 + σzS ) commuta
con σzS . Il significato fisico di HSM e’ che essa e’ zero sullo stato down di S, mentre sullo
stato up di S fa flippare lo stato down di M allo stato up. Assumiamo poi come stato
iniziale per S, la combinazione
|ψ(0)i = c+ |+iS + c− |−iS
(10.33)
|c+ |2 + |c− |2 = 1
(10.34)
con
L’hamiltoniana di interazione e’ diagonale nella base in cui σzS e σxM sono diagonali. Dunque occorre riesprimere lo stato |−iM nella base degli autostati di σxM . Gli autostati di
questo operatore nella base σzM sono dati da
1
1
1
1
M
M
|+ix = √
, |−ix = √
(10.35)
2 1
2 −1
da cui
1
|+iM
x = √ (|+iM + |−iM ),
2
Pertanto, lo stato iniziale di M sara’
1
|−iM
x = √ (|+iM − |−iM )
2
1
M
|M (0)i = |−iM = √ (|+iM
x − |−ix )
2
(10.36)
(10.37)
Supponendo che le hamiltoniane che descrivono S e M siano trascurabili rispetto al
termine di interazione avremo
/
|ψ(τ )i = e−iτ HSM /h |ψ(0)i ⊗ |M (0)i =
S M /
1
M
e−iτ g(1 + σz )σx /h (c+ |+iS + c− |−iS ) ⊗ √ |+iM
x − |−ix
2
(10.38)
tenendo presente che (1 + σzS )σxM vale 2σxM sullo stato up di S e zero sullo stato down, si
trova facilmente
1 h
/
/
+2igτ /h
|ψ(τ )i = √ e−2igτ /h c+ |+iS ⊗ |+iM
c+ |+iS ⊗ |−iM
x −e
x +
2
i
M
+ c− |−iS ⊗ |+iM
(10.39)
x − c− |−iS ⊗ |−ix
Infine, riesprimendo gli autostati di σxM in termini degli autostati di σzM , facendo uso della
(10.36), si trova
/ )|+, −i − ic+ sin(2gτ /h
/ )|+, +i + c− |−, −i
|ψ(τ )i = c+ cos(2gτ /h
(10.40)
Scegliendo il tempo τ in modo da eliminare il termine proporzionale a |+, −i, cioe’
/
2gτ
π
πh
= →τ =
/h
2
4g
136
(10.41)
si ottiene infine
|ψ(τ )i = c− |−, −i − ic+ |+, +i
(10.42)
Il risultato e’ uno stato entangled del sistema con il metro con le proprieta’ desiderate.
Cioe’ se il sistema al tempo τ si trova nello stato up con probabilita’ |c+ |2 , il metro e’
nello stato up. Mentre se si trova in down con probabilita’ |c− |2 , allora il metro e’ down.
La conclusione generale e’ che se lo stato iniziale e’ preparato in una combinazione
lineare di autostati di OS , possiamo arrangiare la misura in modo tale che lo stato finale
complessivo S+M risulti entangled nella maniera desiderata. E’ chiaro che la preparazione
dello stato entangled tramite l’interazione di S con M e’ assolutamente necessaria affinche’
la nostra procedura di misura abbia senso. Dunque l’interazione tra il sistema S ed il metro
puo’ essere considerata preliminare alla misura vera e propria ed e’ quella necessaria a
realizzare l’entanglement tra S ed A. L’interazione tra S e M viene anche descritta come
premisura.
Notiamo che la matrice densita’ che si riferisce allo stato puro che emerge alla fine
della premisura e’ data da
ρSM
= |ψ(τ )ihψ(τ )| = |c+ |2 |+, +ih+, +| + |c− |2 |−, −ih−, −| +
+ ic∗− c+ |+, +ih−. − | − ic∗+ c− | − .−ih+, +|
(10.43)
Questa matrice densita’ ha dei termini misti (termini di interferenza) che derivano dal
fatto che lo stato entangled e’ puro e originano dalla possibilita’ di combinare linearmente
gli stati quantistici. Questa sovrapposizione non e’ pero’ ammissibile nella fase successiva
in cui si passa alla parte macroscopica dell’apparato perche’ porterebbe a sovrapposizione
quantistica per un oggetto macroscopico. Abbiamo anche visto che la struttura entangled
e’ necessaria al fine di poter definire il processo di misura. Dunque in qualche modo e’
necessario che nella parte dell’operazione di misura che segue dopo il metro, i termini di
interferenza si cancellino in modo da ottenere una matrice densita’ che descriva la miscela
statistica
ρSA = |ψ(τ )ihψ(τ )| = |c+ |2 |+, +ih+, +| + |c− |2 |−, −ih−, −|
(10.44)
Nell’interpretazione di Copenhagen questo e’ ovviamente conseguenza del postulato sul
collasso, ma questa posizione non e’ tenibile se vogliamo descrivere la misura in termini
quantistici. Dovremo dunque cercare di capire se la meccanica quantistica stessa ci puo’
offrire una soluzione.
10.2
Misura e sovrapposizione degli stati macroscopici. Il gatto di Schrödinger
Ovviamente la descrizione dell’interazione e’ ipersemplificata, ma serve per far capire
come tutto il processo di misura si possa descrivere in termini quantistici e tramite l’uso
dell’equazione di evoluzione del sistema. Per il futuro ignoreremo i dettagli dell’interazione
ma ci limiteremo ad assumere che ci sia una osservabile di M , che denoteremo come metro,
137
i cui autovalori ci forniscono i risultati della misura. I casi discussi nella sezione precedente
ci dicono che il processo di misura deve essere tale da far passare lo stato |on i ⊗ |a0 i allo
stato |on i ⊗ |an i:
|on i ⊗ |a0 i → |on i ⊗ |an i
(10.45)
Inoltre, per essere piu’ precisi occorre tener conto del fatto che l’apparato consiste anche
in un amplificatore ed in un puntatore, gli stati in HA oltre a dipendere dall’autovalore
considerato del metro, dipendono anche da altri numeri quantici r che nel corso della
misura possono cambiare, dato che nello spostamento del puntatore lo stato microscopico
di A certamente cambiera’. Dunque la transizione dovuta al processo di misura sara’
X (n)
|on i ⊗ |a0 , ri →
crr0 |on i ⊗ |an , r0 i
(10.46)
r0
E’ importante sottolineare che questa transizione e’ il risultato dell’evoluzione temporale
del sistema dovuta all’hamiltoniana di interazione. Segue allora che se lo stato iniziale e’
una combinazione lineare di autostati di OS
X
|ψi =
µn |on i
(10.47)
n
a causa della linearita’ dell’equazione di Schrodinger, lo stato finale sara’ la stessa combinazione lineare degli stati finali dell’equazione (10.46)
X
XX
(n)
|ψi ⊗ |a0 , ri =
µn |on i ⊗ |a0 , ri →
(10.48)
µn crr0 |on i ⊗ |an , r0 i
n
n
r0
Come abbiamo gia’ osservato in precedenza, questa espressione per lo stato finale e’ la
responsabile dei problemi dovuti al problema della misura in meccanica quantistica, quando si voglia dare una descrizione quantistica anche all’apparato di misura. Il paradosso
che ne scaturisce e’ noto come il paradosso del gatto di Schrödinger. Non c’e’ dubbio che
Figura 10.2: Il gatto di Schrödinger.
ogni verifica sperimentale della meccanica quantistica sia in accordo con il postulato di
riduzione. Pero’ se la meccanica quantistica e’ in grado di descrivere tutti i sistemi microscopici deve essere anche in grado di descrivere quelli macroscopici. La conseguenza di
138
questa situazione fu esemplificata da Schrödinger tramite il suo famoso esperimento ideale
sul gatto. Si rinchiuda un gatto in una scatola di acciaio (vedi Figura 10.2) insieme con
un contatore Geiger ed minuscola porzione di sostanza radioattiva. In un dato intervallo
di tempo uno degli atomi si puo’ disintegrare. Se cio’ succede, il contatore lo segnala e
aziona un relais di un martelletto che rompe una fiala con del cianuro che avvelena il gatto.
Oppure puo’ succedere che non ci siano disintegrazioni e che quindi allo scadere del tempo
prefissato il gatto sia vivo. Dagli argomenti precedenti vediamo che il gatto si trova in
uno stato sovrapposto dei due stati vivo o morto. Nell’interpretazione di Copenhagen e’
solo al momento dell’apertura della scatola che si decide in quale stato sia il gatto, vivo
oppure morto con probabilita’ dipendenti dal meccanismo usato.
Torniamo adesso al caso generale e consideriamo la transizione di equazione (10.48).
Se assumiamo che lo stato inziale sia normalizzato segue che anche lo stato finale deve
esserlo (l’evoluzione temporale e’ descritta da un operatore unitario) e quindi si ha la
(n)
seguente condizione di normalizzazione per i coefficienti crr0
X
(n)
|crr0 |2 = 1
(10.49)
r0
Se invece consideriamo lo stato iniziale in (10.48) la condizione di normalizzazione sara’
X
|µn |2 = 1
(10.50)
n
Questa assieme alla precedente implicano che anche lo stato finale della (10.48) sia normalizzato. Se, sempre in questa espressione consideriamo la probabilita’ che l’indicatore
dello stato finale punti su an (corrispondente appunto al valore on di OS ) si ha che tale
probabilita’ e’ data da
X
(n)
(10.51)
|µn |2 |crr0 |2 = |µn |2
r0
Questo e’ esattamente cio’ che ci aspettiamo, cioe’ che la probabilita’ che il metro assuma
il valore an , sia uguale alla probabilita’ che lo stato iniziale sia nell’autostato |on i dell’osservabile OS . Quindi la probabilita’ per OS di avere l’autovalore on viene trasferita alla
probabilita’ di un fenomeno, la posizione del metro, che mostra come risultato il valore an
corrispondente appunto ad on .
Consideriamo infine una ulteriore semplificazione. Dopo la misura possiamo considerare il sistema microscopico S al quale abbiamo applicato il nostro processo di misura come
facente parte dell’apparato di misura A. Chiameremo il nuovo sistema macroscopico A0 .
Nel caso dello spin, possiamo pensare che la particella si arresti nell’apparato di misura
dopo che sia stata determinata la direzione dello spin. Dunque il nuovo sistema A0 sara’
uguale al sistema A + S . Questo aggiungera’ solo alcune altre variabili (quelle di S) alle
moltissime altre che stiamo usando per descrivere A. Potremo allora evitare di scrivere lo
139
stato finale come un prodotto tensoriale3 ma usare invece la notazione
X
X
X
(n)
(n)
µn |on i ⊗ |a0 , ri →
µn crr0 |on i ⊗ |an , r0 iM =
µn crr0 |an , r0 iM 0
n
n,r0
(10.52)
n,r0
Come risultato vediamo che lo stato finale e’ una somma di stati distinti macroscopici.
Quando effettuiamo una misura, sappiamo che dovremo preparare N copie dello stato
iniziale. Nell’esempiodella Sezione precedente (spin con metro a due stati) troveremo (per
N sufficientemente grande) |c+ |2 N volte il puntatore in alto ed |c− |2 N volte il puntatore
in basso. L’interpretazione e’ che lo spin della particella in esame ha probabilita’ |c+ |2
di essere up e probabilita’ |c− |2 di essere down. Potrebbe sembrare naturale interpretare
il risultato dicendo che si ha un insieme statistico con |c+ |2 N particelle di spin up e
|c− |2 N particelle di spin down. Abbiamo gia’ visto in un caso simile (vedi Sezione 8.2)
che le matrici densita’ di uno stato puro del tipo considerato in precedenza (dove adesso
indichiamo gli stati del metro con | ↑i e | ↓i), come per esempio,
1
1
|ψi = √ |+i ⊗ | ↑i + √ |−i ⊗ | ↓i
2
2
(10.53)
o in uno stato misto, che in questo caso sarebbe descritto dalla matrice densita’
1
1
ρ = (|+i ⊗ | ↑i)(h+| ⊗ h↑ |) + (|−i ⊗ | ↓i)(h−| ⊗ h↓ |)
(10.54)
2
2
sono profondamente diverse. Calcoliamo la matrice densita’ nei due casi nella rappresentazione in cui
0
1
(10.55)
,
|−i ⇔
|+i ⇔
1
0
e
0
1
(10.56)
,
| ↓i ⇔
| ↑i ⇔
1
0
Avremo per
1
1
1
|ψi = √ |+i ⊗ | ↑i + √ |−i ⊗ | ↓i ⇔ √
2
2
2
da cui
1
0
1
0
0 0
1
+
|ψi ⇔ √
2 0 0
0
1
⊗
1
0
0
1
1
= √1 0
2 0
1
La corrispondente matrice densita’ e’ data da
1
1 0
1 0 0 1 = 1
ρψ = |ψihψ| ⇔
0
2
2
1
3
1
+√
2
⊗
0
1
(10.57)
1
0
0
1
0
0
0
0
0
0
0
0
(10.58)
1
0
0
1
(10.59)
Questa identificazione e’ dello stesso tipo di quella usata per descrivere lo stato a due particelle
in termini di un prodotto tensoriale di stati ad una particella. In questo caso diciamo che scrivere
|x1 i ⊗ |x2 i e’ equivalente a scrivere |x1 , x2 i
140
Per la matrice ρ di equazione (10.54) si ha invece
1
1 0
0
0
0
1 0 0
1
1 0 0 0 + 0 0 0 1 =
ρ=
0
2 0 0
2 0
0
0 0
1
0
0
0
0
0
0
(10.60)
0
1
Vediamo che tutta la differenza tra le due matrici e’ negli elementi fuori della diagonale
principale. Questi elementi, che non sono nulli nella matrice relativa allo stato puro, danno
luogo a termini di interferenza che pero’ nel caso macroscopico non sono accettabili.
Torniamo adesso al caso generale e calcoliamo la matrice densita’ per lo stato (10.52)
X
(n) (n0 )∗
ρ=
µn µ∗n0 crr0 crr00 |an , r0 ihan0 , r00 |
(10.61)
n,n0 ,r0 ,r00
Possiamo calcolare il generico elemento di matrice con il risultato:
(n) (n0 )∗
han , r0 |ρ|an0 , r00 i = µn µ∗n0 crr0 crr00
(10.62)
Dato che gli indici r non giocano nessun ruolo fintanto che ci limitiamo all’osservazione
del puntatore, possiamo definire una matrice densita’ ridotta dalla formula
X
X (n) (n0 )∗
han |ρrid |an0 i =
han , r0 |ρ|an0 , r0 i = µn µ∗n0
crr0 crr0
(10.63)
r0
r0
Quando n = n0 si ha per la (10.49)
han |ρrid |an i = |µn |2
(10.64)
come ci aspettiamo per una miscela statistica. Ma in questo caso gli elementi non diagonali
dovrebbero dare un risultato nullo, cioe’ si dovrebbe avere
han |ρrid |an0 i = |µn |2 δnn0
(10.65)
Dunque lo stato finale che si ottiene dopo la misura non e’ costituito da eventi chiaramente
distinti, cioe’ abbiamo una sovrapposizione di stati macroscopici. Questo e’ chiaro se
pensiamo di misurare un’osservabile C dell’apparato di misura e che non commuta con
l’osservabile che definisce il metro. Dalla miscela statistica ci aspetteremmo
X
hCi =
|µn |2 han |C|an i
(10.66)
n
mentre si ha
hCi =
X
µn µ∗n0 han0 |C|an iInn0
(10.67)
n,n0
dove
Inn0 =
X
(n) (n0 )∗
crr0 crr0
r0
141
(10.68)
Pertanto quando si voglia descrivere l’apparato di misura in termini quantistici, il risultato
e’ che si ha interferenza tra stati macroscopicamente diversi associati a diversi risultati
della misura. Questa conclusione deriva dall’aver considerato l’apparato di misura come
un oggetto descrivibile in termini quantistici. Chiaramente nell’interpretazione di Copenhagen si rinuncia a questa possibilita’ ed il problema non sorge. Infatti il risultato finale
dell’esperimento e’ interpretabile in termini di probabilita’, vista la riduzione della funzione d’onda che e’ appositamente postulata perche’ l’interpretazione probabilistica sia
consistente. Rimane pero’ il fatto che non e’ evidente a priori il criterio secondo cui un
oggetto puo’ considerarsi classico o quantistico. Sebbene caso per caso questa distinzione
possa essere fatta, non esiste un criterio generale.
D’altra parte una soluzione semplice e’ quella di assumere che la quantita’ Inn0 sia data
da δnn0 , cioe’ che sia nulla per n 6= n0 . Ovviamente occorre pero’ far vedere che questo
e’ compatibile con la dinamica quantistica. Questo e’ per l’appunto cio’ che accade per
l’effetto di decoerenza. In questo caso, a causa della inevitabile interazione con l’ambiente, si puo’ far vedere che in un tempo estremamente piccolo, i diversi stati macroscopici
diventano praticamente ortogonali tra loro a causa della dinamica di Schrödinger e quindi
gli effetti di interferenza vanno a zero.
Un’altra possibilita’, discussa da Von Neumann, e’ quella che un risultato diventi noto
solo dopo che la coscienza dell’osservatore lo ha registrato. E’ questo atto che rompe la
catena della dinamica quantistica e che da’ luogo alla riduzione della funzione d’onda.
L’idea e’ affascinante ma richiede che in qualche modo l’atto di prendere coscienza non sia
descrivibile in termini quantistici ed in definitiva non differisce molto dall’interpretazione
di Copenhagen.
Notiamo anche che la riduzione del pacchetto e’ in accordo con tutte le osservaziioni e
gli esperimenti effettuati e che quindi l’uguaglianza Inn0 = δnn0 e’ certamente confermata
dai dati. Il punto e’ che trovarne una spiegazione non e’ banale. D’altro canto la difficolta’
principale in una spiegazione teorica generale e’ che un sistema macroscopico non e’ facilmente descrivibile (sia in termini classici che quantistici) a causa dell’immenso numero di
gradi di liberta’ da cui e’ composto.
10.3
La decoerenza
Negli anni 70 Zeh e all’inizio degli anni 80 Zurek osservarono che era possibile eliminare i
termini misti presenti nella matrice densita’ a livello di premisura. L’osservazione cruciale
e’ che se il sistema, come in pratica succede sempre, interagisce con l’ambiente circostante,
allora i termini misti non desiderati vengono eliminati. In altri termini, contrariamente al
caso classico in cui si suppone che un sistema fisico possa sempre considerarsi isolato, cioe’
che si possano sempre rendere trascurabili le interazioni con l’esterno, qui la situazione e’
opposta. Si considera cioe’ un sistema quantistico come un sistema aperto che interagisce
con l’ambiente. Come vedremo, quando si voglia considerare la misura di un’osservabile
del sistema, si puo’ effettuare una traccia parziale sulla matrice densita’ relativa al sistema
142
piu’ ambiente, sulle variabile di ambiente. Restringendo cosi’ la dinamica complessiva alla
dinamica del solo sistema e’ possibile ottenere il fenomeno di cui abbiamo bisogno, cioe’ che
l’operatore di evoluzione, unitario nello spazio complessivo, dia luogo ad una operazione
non unitaria sul sistema in esame. In pratica la traccia ci fornisce automaticamente la
riduzione del vettore di stato, facendo si che la matrice densita’ ridotta (cioe’ tracciata
sulle variabili di ambiente) descriva una miscela statistica.
Consideriamo adesso l’idea base dell’approccio di Zurek. Il vettore di stato e’ considerato come un vettore nello spazio di Hilbert prodotto diretto di quello del sistema S, di
quello dell’apparato di misura A e di quello dell’ambiente E, |ψSAE i. Per semplicita’ identificheremo l’apparato di misura con il metro. Questo ci libera dall’appesantimento delle
notazioni della sezione precedente in quanto, come abbiamo visto, le variabili r necessarie
per descrivere il puntatore e l’amplificatore non giocano alcun ruolo. Il processo di misura
viene diviso idealmente in due fasi. Per semplicita’ supponiamo che lo stato iniziale sia
uno stato fattorizzato del tipo
|ψSAE (0)i = |ψi ⊗ |a0 i ⊗ |ψE i
(10.69)
A causa dell’interazione tra il sistema e l’apparato di misura al tempo t = t1 si avra’
l’effetto di entanglement tra S ed A dovuto alla premisura. Successivamente, tra t1 e
t2 > t1 l’ambiente E subira’ l’entanglement con S ed A. Quindi avremo
#
"
X
|ψi ⊗ |a0 i ⊗ |ψE (0)i →
ci |oi i ⊗ |ai i ⊗ |ψE (t1 )i, t = t1
i
X
→
ci |oi i ⊗ |ai i ⊗ |ei i,
t > t2
(10.70)
i
La seconda trasformazione sara’ descritta tramite un operatore di evoluzione unitario che
coinvolge l’hamiltoniana di interazione tra i tre sistemi S, A ed E. Chiaramente la matrice
densita’ per t > t2 contiene termini misti del tipo visto precedentemente, ma se valutiamo
la matrice densita’ ridotta
X
X
ρrid = TrE |ψASE (t)ihψASE (t)| =
hej |ρ|ej i =
|cj |2 |oj i ⊗ |aj ihoj | ⊗ haj |
(10.71)
j
j
vediamo che essa corrisponde ad una miscela statistica in cui ogni autovalore oi , segnalato
dal metro con il valore ai , occorre con probabilita’ |ci |2 . Si mostra facilmente che questo
risultato continua a valere anche nel caso in cui si considerino le variabili addizionali r
purche’ nel definire la matrice ridotta si effettui una traccia anche su queste variabili.
Si potrebbe mostrare che l’informazione contenuta nei termini misti non e’ persa nel
sistema totale ma e’ trasferita dalla parte S, A all’ambiente E. D’altra parte, dal punto
di vista dell’apparato, questa informazione viene completamente perduta. Il fatto che il
postulato di proiezione venga riprodotto in questa forma e’ perfettamente consistente con
una evoluzione unitaria nello spazio totale ma che diventa non unitaria allorche’ la si esami
sul sistema piu’ l’apparato di misura. L’ipotesi che abbiamo fatto nello scrivere la seconda
143
delle formule (10.71) e’ che ci sia una perfetta correlazione tra l’ambiente E e l’apparato
di misura A. In genere non e’ cosi’ e questo fa si che la matrice densita’ ridotta non
sia perfettamente diagonale ma contenga ancora dei termini misti. Questo porta all’idea
di un tempo tipico, detto tempo di decoerenza, tdec , tale che i termini non diagonali
decadano esponenzialmente a zero con una legge del tipo
e−t/tdec
(10.72)
L’idea di un tempo di decoerenza fu introdotta da Zurek che ne propose anche una definizione nel caso particolare di sovrapposizione di due gaussiane interagenti con un bagno
termico a temperatura T , cioe’ con un ambiente a temperatura fissata. Nel caso particolare
di una dimensione spaziale si trova
tdec
1
=
γ
λT
∆x
2
(10.73)
dove γ rappresenta l’inverso del tempo di rilassamento, definito dal modo in cui le particelle
cedono energia all’ambiente exp (−tγ) ed e’ anche proporzionale all’accoppiamento tra le
particelle e l’ambiente. Quindi quanto piu’ piccolo e’ l’accoppiamento e quanto piu’grande
e’ il tempo di decoerenza. ∆x e’ la separazione tra i due picchi gaussiani, quindi maggiore
e’ la separazione e piu’ piccolo e’ tdec . Infine λT e’ la lunghezza d’onda termica di de
Broglie
/h
(10.74)
λT = √
2mkT
dove k e’ la costante di Boltzman. Ricordiamo infatti che a temperatura costante una particella libera ha una energia cinetica media hp2 /2mi = kT e quindi la lunghezza d’onda
termica e’ proprio la lunghezza d’onda di De Broglie, dove l’impulso e’ quello corrispondente ad una energia termica pari a kT . Per avere un tdec piccolo, anche λT deve essere
piccola, quindi si deve avere una temperatura elevata.
Possiamo costruire un semplice modello per capire cosa succede quando non c’e’ perfetta correlazione tra ambiente, ed il sistema piu’ puntatore. Per semplicita’, dato che
comunque puntatore e sistema devono essere correlati, descriviamoli entrambi con un unico vettore di stato. A questo punto considereremo sistema +puntatore come descritti
da uno spin 1/2, mentre non faremo assunzioni particolari sull’ambiente, salvo assumere
che i due stati che si correlano con |±i non sono ortogonali tra loro. Avremo dunque
un’evoluzione temporale nello spazio di Hilbert complessivo del tipo
|+i ⊗ |Ei → |+it ⊗ |E+ it
|−i ⊗ |Ei → |−it ⊗ |E− it
(10.75)
Definiremo il prodotto scalare come una variabile η che in genere sara’ diversa da zero:
η = hE+ |E− i
144
(10.76)
Se assumiamo gli stati |E± i normalizzati, segue dalla disuguaglianza di Schwarz e dall’assunzione che η sia reale e positivo
hE± |E± i = 1 −→ 0 ≤ η ≤ 1
(10.77)
Per trattare il problema, consideriamo due vettori dell’ambiente ortonormali tra loro,
|E1,2 i al tempo t, ed espandiamo |E± i su questa base
p
p
|E+ it =
λ(t)|E1 i + 1 − λ(t)|E2 i
p
p
|E− it =
λ(t)|E2 i + 1 − λ(t)|E1 i
(10.78)
dove assumiamo λ ≤ 1. La dinamica dell’ambiente e della sua interazione con lo spin e’
stata parametrizzata dalla funzione λ(t). Usando l’ortonormalita’ di |E1,2 i vediamo che
gli stati |E± i sono correttamente normalizzati e che
p
(10.79)
η = 2 λ(1 − λ)
Dalla condizione iniziale |E+ it=0 = |E− it=0 = |Ei segue
p
p
1
λ(0) = 1 − λ(0) → λ(0) =
2
(10.80)
η(0) = 1
(10.81)
e
L’idea fondamentale della decoerenza e’ che al passare del tempo gli stati E± dell’ambiente,
essendo descritti da molti gradi di liberta’, si differenziano sempre piu’ sino a diventare
ortogonali per t → ∞. Quindi, in questa ipotesi e’ sensato parametrizzare η(t) in termini
di una funzione esponenziale che ha esattamente queste caratteristiche
η(t) = e−t/tdec
(10.82)
Consideriamo adesso uno stato iniziale dello spin che sia una sovrapposizione dei due stati
di spin up e down
|ψi = cos(θ/2)|+i + sin(θ/2)|−i
(10.83)
Dunque l’evoluzione temporale, per linearita’, sara’ data da
|ψi ⊗ |Ei → cos(θ/2)|+it ⊗ |E+ it + sin(θ/2)|−it |E− it
(10.84)
Espandendo |E± i in termini di |E1,2 i si trova
|ψi ⊗ |Ei → |ψ1 i ⊗ |E1 i + |ψ2 i ⊗ |E2 i
(10.85)
p
p
λ(t) cos(θ/2)|+it + 1 − λ(t) sin(θ/2)|−it
p
p
|ψ2 i =
1 − λ(t) cos(θ/2)|+it + λ(t) sin(θ/2)|−it
(10.86)
con
|ψ1 i =
145
Consideriamo ora una misura dello spin fatta lungo la direzione x. Gli autostati di Sx ,
nella base in cui e’ diagonale Sz sono
1
|±ix = √ (|+i ± |−i)
2
(10.87)
Per calcolare la probabilita’ di misurare lo spin lungo le direzioni ±x, calcoliamo la matrice densita’ ridotta relativa allo spin dalla matrice densita’ del sistema piu’ l’ambiente.
Dall’equazione (10.85) si trova
ρrid = Tr[ρ] = hE1 |(|ψ1 i ⊗ |E1 i + |ψ2 i ⊗ |E2 i)(hψ1 | ⊗ hE1 | + hψ2 | ⊗ hE2 |)|E1 i +
+ hE2 |(|ψ1 i ⊗ |E1 i + |ψ2 i ⊗ |E2 i)(hψ1 | ⊗ hE1 | + hψ2 | ⊗ hE2 |)| =i
= |ψ1 ihψ1 | + |ψ2 ihψ2 |
(10.88)
Vediamo che la matrice densita’ ridotta, come ci aspettiamo, non corrisponde ad uno stato
puro ma ad una miscela statistica. Pero’ questa matrice non e’ diagonale nella base Sz , ci
sono cioe’ dei termini di inerferenza. Infatti si ha
p
p
λ(t)
cos(θ/2)
1
−
λ(t)
cos(θ/2)
p
, |ψ2 i =
(10.89)
|ψ1 i = p
1 − λ(t) sin(θ/2)
λ(t) sin(θ/2)
Pertanto ρrid e’ data da
ρrid =
2
p cos (θ/2)
λ(t)(1 − λ(t) sin θ
p
λ(t)(1 − λ(t) sin θ
sin2 (θ/2)
dove abbiamo usato la relazione sin θ = 2 sin(θ/2) cos(θ/2).
proiezione per gli autostati di Sx sono
1
1 ±1
P±x =
2 ±1 1
(10.90)
Inoltre gli operatori di
(10.91)
Dunque le probabilita’, P±x , di trovare la particella con spin lungo l’asse ±x:
P(±x) = Tr[ρrid P±x ] =
1
cos2 (θ/2) sin θ η(t)/2
1 ±1
=
Tr
sin θ η(t)/2 sin2 (θ/2)
±1 1
2
(10.92)
dove abbiamo usato la (10.79) per riesprimere λ in funzione di η. Il calcolo di questa
traccia e’ immediato e si trova
1
P(±x) = (1 ± η sin θ)
2
(10.93)
Il caso di perfetta correlazione tra sistema ed ambiente corrisponde a η = 0, cioe’ quando
gli stati |E± i coincidono con |E1,2 i e quindi sono ortogonali tra loro e questa situazione si
verifica a t → +∞. Questa situazione asintotica e’ di fatto raggiunta in tempi di qualche
unita’ di tdec . Altrimenti gli effetti di interferenza si fanno sentire sulle probabilita’ di
146
P(+x)
θ
Figura 10.3: La probabilita’ P(+x) in funzione di θ. Il segmento corrisponde a
η = 0, cioe’ perfetta correlazione. Le due curve sopra il segmento sono per η = 0.5
e per η = 1 rispettivamente.
misurare lo spin lungo la direzione x, modulandole tramite il termine η sin θ, come illustrato
in Fig 10.3.
Scully, Shea e Mc Cullen (Physics Reports, 43 C, 485, 1978) hanno proposto un
semplice modello che mette in luce il fatto che e’ possibile realizzare il collasso senza la
necessita’ della coscienza dell’osservatore come richiesto da Von Neumann. Il modello
serve anche per illustrare le caratteristiche principali della decoerenza, nel senso che e’
effettivamente possibile realizzare la decoerenza pur di arrangiare i parametri del modello
in modo da cancellare i termini di interferenza. Niente ci dice pero’ sul decadimento
esponenziale di questi termini, cioe’ del tempo di decoerenza. Vedremo un modello di
questo tipo successivamente.
Il modello di Scully, Shea e Mc Cullen consiste in uno SG in cui i fasci, dopo essere
divisi sono fatti interagire con un atomo con due soli stati, il fondamentale e lo stato
eccitato (in pratica e’ sufficiente che le energie in gioco non permettano di eccitare i livelli
superiori). Questo atomo puo’ servire da apparato di misura se si decide di osservare
il risultato. Se invece non leggiamo il risultato, i nostri fasci interagiscono con questo
atomo e questo porta alla distruzione dei termini di interferenza e ad una matrice densita’
ridotta corrispondente ad una miscela statistica. Pertanto, almeno nel modello in esame, il
postulato di riduzione e’ una conseguenza della dinamica descritta dall’interazione dei fasci
molecolari con un atomo che e’ considerato esterno al sistema. Il modello e’ rilevante dal
punto di vista di von Neumann che richiede la partecipazione attiva di un osservatore per
provocare il collasso del vettore di stato. Il modello in esame mostra invece che la riduzione
e’ possibile anche senza un osservatore attivo ma che e’ sufficiente un’interazione con un
oggetto inanimato come un atomo, purche’ questa interazione non venga osservata. In
altri termini per la riduzione e’ sufficiente che il sistema S sia un sistema aperto. Si spiega
147
cosi anche la dinamica non unitaria a livello del sistema dei fasci. L’operatore di evoluzione
e’ unitario nello spazio complessivo, fasci molecolari + atomo, ma questa proprieta’ non
vale piu’ nello spazio ridotto dei fasci molecolari. Infatti una matrice unitario in uno
spazio, non lo e’, in genere, in un sottospazio. Basta pensare al caso 2 × 2 ridotto ad una
dimensione:
cos θ − sin θ
U=
, UU† = 1
(10.94)
sin θ cos θ
Chiaramente la sottomatrice U11 = cos θ non e’ unitaria.
10.4
Altre interpretazioni
Abbiamo gia’ discusso in precedenza l’interpretazione di Von Neumann che fa riferimento
alla coscienza dell’osservatore. Vediamo ora altre interpretazioni che sono state proposte
che pero’, al contrario della decoerenza, richiedono una estensione della usuale meccanica
quantistica. Daremo qui un breve elenco delle interpretazioni, a giudizio personale, piu’
significative.
Interpretazione a molti mondi
Nel 1957 Everett propose che in realta’ non ci fosse un collasso del vettore di stato ma che
le sue componenti, relative alla decomposizione dell’osservabile in oggetto, si evolvessero
ognuna in un mondo differente. Cioe’, se misuriamo Ω e lo stato e’
X
|ψi =
ck |ωk i
(10.95)
k
ogni componente |ωk i evolve in un mondo diverso. Quindi non c’e’ mai un collasso del
vettore di stato in quanto lo stato si evolve in maniera unitaria nell’isieme dei mondi,
e’ semplicemente l’osservatore che seguendo una di queste linee mondo e vede solo una
componente del vettore, pensa che ci sia stata una riduzione dello stato. In altri termini,
ad ogni osservazione, la particolare linea mondo seguita dall’osservatore che fa la misura si
ramifica in tante linee monde relative alla varie componenti del vettore di stato. Sebbene
su una base interpretativa completamente diversa, anche questa interpretazione usa il fatto
che un operatore unitario nello spazio complessivo possa diventare non unitario quando
ristretto ad una particolare linea mondo.
Uno dei problemi e’ la degenerazione delle basi. Infatti il vettore di stato puo’ decomporsi in basi diverse a seconda dell’osservabile che si vuole misurare. Dunque dovrebbero
esistere mondi relativi a tutte le possibili scelte di base che noi desideriamo fare per il
vettore di stato. Un altro problema riguarda la spiegazione del perche’ le diverse componenti di una funzione d’onda abbiano probabilita’ diverse di essere realizzate nel mondo
del singolo osservatore. Dato che tutte le possibilita’ sono permesse dalla decomposizione
del vettore di stato ci si apetterebbe che queste fossero equiprobabili.
148
Modifiche dell’equazione di Schrödinger
Alcuni autori, come per esempio Ghirardi Rimini e Weber, hanno proposto delle modifiche
ad hoc dell’equazione di Schrödinger dipendenti da un parametro tale che le applicazioni
al microcosmo, cioe’ ad oggetti di piccole dimensioni, sono identiche a quelle della Meccanica Quantistica tradizionale. D’altro canto se si considerano oggetti macroscopici questa
modifica diventa rilevante e permette la riduzione del pacchetto d’onda.
149
Capitolo 11
Conclusioni
Quindi concludendo, abbiamo visto che
• La decoerenza fa si che i termini di intereferenza tra stati macroscopici vadano a zero
esponenzialmente con un andamento tipico exp(−t/tdec ). Il tempo di decoerenza tdec
e’ molto piccolo rispetto al tempo di dissipazione, tdec τ , che a sua volta e’ legato
all’interazione tra variabili collettive e d’ambiente. Questo significa che anche per
una piccola interazione (cioe’ per un tempo di dissipazione lungo), l’interferenza
e’ comunque piccola. Abbiamo pero’ anche detto che in certi sistemi macroscopici
in cui l’interazione sia particolarmente piccola, i fenomeni di interferenza possono
riemergere.
• Il rapporto tdec /τ dipende dal rapporto tra la costante di Planck ed una quantita’,
con le dimensioni di un’azione, che e’ costruita con i parametri macroscopici dell’apparato di misura. Da questo segue che il rapporto e’ molto piccolo. Vediamo
cosi che il problema della decoerenza e’ profondamente connesso con la transizione
tra classico e quantistico che anche, in linea generale, e’ caratterizzata dal rapporto
tra la costante di Planck ed una grandezza caratteristica di ogni sistema che e’ la
variabile di azione del sistema stesso.
• La decoerenza risolve il problema del collasso del vettore di stato nell’ambito della
meccanica quantistica stessa. Dunque si ottiene una risposta chiara al paradosso del
gatto di Schrödinger. Quando apriamo la scatola il gatto sara’ sempre vivo o morto.
In effetti non appena preparato il sistema, la sovrapposizione quantistica dei due
stati vivo o morto si riduce in modo quasi immediato alla loro miscela statistica.
L’approccio della decoerenza non e’ privo di critiche. Per esempio Bell non era assolutamente soddisfatto da questo tipo di risposta che considerava di tipo FAPP (For All
Practical Purposes) e priva di un valore universale. Infatti, data la linearita’ della equazione di Schrödinger, se all’istante iniziale il sistema e’ sovrapposizione lineare di due stati
macroscopici lo rimarra’ sempre. D’altra parte abbiamo visto che la risposta della decoerenza e’ quella di considerare un qualunque sistema quantistico come un insieme aperto
150
che si evolve unitariamente nello spazio di Hilbert totale, ma che l’evoluzione puo’ essere
non-unitaria quando si restringa l’operatore di evoluzione ad un sottospazio.
Ci sarebbe da chiedersi cosa ne penserebbe oggi del problema John Stewart Bell1 se
fosse ancora tra noi.
1
John Bell e’ nato a Belfast nel 1928 ed e’ morto a Belfast nel 1990
151