ELETTROTECNICA:
LE MACCHINE ELETTRICHE
PARTE PRIMA
Lezioni di Delucca Ing. Diego
Cominciamo con il definire cosa si intende per Macchina Elettrica.
Una macchina elettrica è un dispositivo in grado di trasformare l’energia, il cui
funzionamento si basa su due leggi fondamentali:
la legge dell’induzione magnetica, ossia un circuito elettrico soggetto ad un
flusso magnetico variabile nel tempo diventa sede di una tensione indotta, così
esprimibile, e = - / t. Essa è nota come legge di Faraday, Neumann, Lenz.
la legge dell’azione dinamica, ossia un conduttore percorso da una corrente I
e posto in un campo magnetico di induzione B è soggetto ad una forza F data
da, F = IBl, con l lunghezza del conduttore interessata dal campo magnetico.
Le trasformazioni energetiche ci consentono di effettuare le seguenti considerazioni,
utili per fornire una prima classificazione delle macchine elettriche:
( tenendo conto della seguente simbologia, con Pe si indica la potenza elettrica, Pm
la potenza meccanica, Pp la potenza perduta o dissipata, Da un punto di vista
generale si può anche parlare di Potenza assorbita o Pa, Potenza resa o restituita
Pr e Potenza dispersa o perduta Pp. )
Pe
TRASFORMATORE
Pe
Pp
Il trasformatore opera sullo stesso flusso energetico, ossia assorbe potenza elettrica e
la trasforma in potenza elettrica, variando semplicemente il legame fra tensione e
corrente. Infatti, il trasformatore è distinto in elevatore di tensione, ossia tensione
elevata e basso valore di corrente, oppure abbassatore di tensione ossia basso valore
di tensione ed elevato valore di corrente. In questo caso, quindi, si può ammettere che
1
il trasformatore assorbe potenza elettrica e restituisce potenza elettrica, a spese di
potenza dissipata in calore.
Pe
Pm
MOTORE
Pp
Il motore elettrico assorbe potenza elettrica e restituisce potenza meccanica, come
movimento rotatorio dell’albero della macchina stessa, ( scapito di potenza persa
come calore ).
Pm
Pe
GENERATORE
Pp
Il generatore elettrico assorbe potenza meccanica per restituire potenza elettrica.
Pe
Pm
FRENO
Pp
Il freno è una macchina che assorbe sia potenza elettrica che meccanica per dissipare
tutto in calore.
2
Cenno sul RENDIMENTO
Un qualsiasi dispositivo non restituisce in toto tutto ciò che assorbe, poiché una parte
viene persa, comunque, sotto forma di calore. Non è possibile eliminare
completamente questa parte perduta. Pertanto, il rapporto fra la potenza resa o
restituita dalla macchina e la potenza assorbita da essa, costituisce ciò che si indica
col termine di rendimento η.
E’ possibile dimostrare che il rendimento sia minore di 1?
Sì è possibile attraverso queste semplici considerazioni.
η = Pr / Pa = ( Pa – Pp ) / Pa = ( Pa / Pa ) – ( Pp / Pa ) = 1 – Pp / Pa.
Da quanto visto fino ad ora una caratteristica peculiare delle macchine elettriche è la
loro reversibilità, ossia la possibilità di invertire il verso o il senso del flusso
energetico.
CLASSIFICAZIONE delle MACCHINE ELETTRICHE
Vedremo la loro classificazione sotto una forma grafica.
MACCHINE ELETTRICHE
DINAMICHE o
ROTANTI
STATICHE
TRASFORMATORI
MOTORI
in
CORRENTE
CONTINUA
GENERATORI
ASINCRONI
3
in
CORRENTE
ALTERNATA
MOTORI
GENERATORI
SINCRONI
CIRCUITI ELETTRICI E MAGNETICI DI UNA MACCHINA ELETTRICA
Nella struttura di base di ogni macchina elettrica si possono distinguere 2 circuiti
elettrici, mutuamente accoppiati, da un circuito magnetico. I due circuiti elettrici si
distinguono in:
Circuito Induttore, che ha lo scopo di creare il campo magnetico, mediante la
circolazione della corrente nei conduttori che lo costituiscono. Esso è spesso
indicato col nome di circuito di eccitazione e la sua corrente, di conseguenza,
prende il nome di corrente di eccitazione;
Circuito Indotto, sul quale agisce il campo magnetico e che risente delle
variazioni di quest’ultimo, diventando così sede di tensioni e di correnti
indotte. L’insieme delle azioni prodotte dall’avvolgimento del circuito indotto
si dice reazione di indotto.
Nel trasformatore il circuito magnetico è unico ed è detto nucleo magnetico. In
questo caso i due avvolgimenti sono avvolti sul nucleo e sono interessati al flusso
magnetico che è presente nel nucleo stesso.
Esempio di nucleo magnetico di un trasformatore monofase e mantello
/2
/2
Nelle macchine rotanti sono presenti, invece, due parti. Una parte fissa detta statore
e la parte mobile detta rotore o indotto. Il rotore è meccanicamente collegato con
l’albero di rotazione della macchina elettrica. Lo statore ed il rotore sono separati tra
loro da un sottile strato d’aria detto traferro. In questo caso le linee di flusso si
sviluppano sia nel materiale ferromagnetico che nell’aria, ( esso perché si può parlare
di circuito magnetico statorico e di circuito magnetico rotorico ).
4
Lo spessore del traferro dipende da due ragioni fondamentali, ossia per ragioni
meccaniche che per il corretto dimensionamento elettromeccanico della macchina.
A secondo del tipo di rotore impiegato, le macchine elettriche, si distinguono in:
macchine a poli lisci, in cui non vi sono espansioni polari nei due nuclei e
perciò, il traferro ha uno spessore costante lungo tutta la circonferenza.
Queste macchine si dicono, pertanto, isotrope, poiché la riluttanza è costante secondo
tutte le direzioni uscenti radialmente dal centro della circonferenza medesima.
macchine a poli salienti o sporgenti, in cui vi sono delle espansioni polari, o
nel rotore o nello statore, che sporgono dalla superficie cilindrica. In questo
caso il traferro ha uno spessore variabile e proprio per questa ragione, questo
tipo di macchina, prende il nome di macchina anisotropa, ( in quanto la
riluttanza non ha valore costante, infatti il valore risulta minimo lungo la
direzione dei poli, ossia nella zona in cui lo spessore del traferro risulta più
contenuto. )
statore
Nord
traferro
Nord
rotore
Sud
Sud
Macchina isotropa a poli
Lisci
Macchina anisotropa a poli
salienti o sporgenti
5
PERDITE nelle MACCHINE ELETTRICHE
Nelle macchine elettriche si possono considerare le seguenti perdite:
Macchine elettriche
Perdite negli
avvolgimenti o per
effetto Joule
Perdite
addizionali o per
invecchiamento
Perdite meccaniche:
per attriti vari o per
avviamento, per
ventilazione, per
contatto con le
spazzole, ecc.
Perdite nel nucleo
magnetico:
perdite per correnti
parassite o di Foucault e
perdite per ciclo di
isteresi
Le perdite negli avvolgimenti elettrici si esprimono attraverso la relazione:
Pj = R( I )² = ( ρl / S ) I²,
ma I = densità per area attraversamento del conduttore = GS, di conseguenza
sostituendo si ottiene,
Pj = ( ρl / S ) G² S² = ρl G² S.
Tenendo presente che, Sl = volume, potremo allora scrivere:
Pj = ρl G² S = ρ G² V, da cui si deduce che le perdite specifiche per unità di volume
del rame è, pV = Pj / V = ρ G² ed essa si misura in Watt / m3.
Se si ricorda la definizione di densità d, ossia ricordando che la densità di un
materiale è definita come: d = massa / volume,
conseguentemente volume = massa / densità = M / d,
ora se questa relazione la sostituiamo nella relazione, Pj = ρl G² S = ρ G² V = ρ G²
M / d, ciò implica che,
6
pm = Pj / M = ρ G² / d, dove pm rappresenta la perdita specifica per unità di massa
del rame, la quale si misura in Watt / Kg.
Nel caso dei conduttori in rame, funzionanti con una densità di corrente G tra 2 e 4
A / mm2, la pm varia tra i 10 ed i 40 W / Kg.
ESERCIZIO
Calcolare la perdita pV e pm che si ha a 75 °C in un avvolgimento di rame,
( ρ20 = 0,0178 mm2 / m; = 3,81 . 10-3 ( °C-1 ) e d = densità = 8,9 Kg / dm3 =
8900 Kg / m3 ), funzionante con una densità di corrente
G = 3,5 A / mm2 = 3,5 . 106 A / m2.
Bisogna tenere presente che all’aumentare della temperatura, anche la resistività del
rame si modifica. La formula che ci consente di tenere conto di questo fatto è:
ρ75 = ρ20 ( 1 + T ).
Pertanto si ottiene che:
ρ75 = 0,0178( 1 + 3,81 . 10-3 ( 75 – 20 )) = 0,0178 ( 1 + 3,81 . 10-3 ( 55 )) =
0,02153 mm2 / m = 0,02153 . 10-6 m.
A questo punto la perdita specifica per unità di volume si ottiene come:
pV = ρ G² = 0,02153 . 10-6 . ( 3,5 . 106 )2 = 0,264 . 106 W / m3.
Mentre la perdita specifica per unità di massa del rame si ottiene applicando la
relazione: pm = ρ G² / d = 0,264 . 106 / 8900 = circa = 29,7 W / Kg.
PERDITE ADDIZIONALI
E’ possibile ammettere per le macchine elettriche delle perdite addizionali. Tutte le
parti, anche se realizzate correttamente, non sono perfette e quindi si possono
verificare dei fenomeni di perdita aggiuntivi. Si deve inoltre tenere conto che i
materiali, invecchiando, possono assolvere meno bene al loro compito e dare luogo
ad perdite maggiori di quelle preventivate all’inizio. Tenendo presente i termini
simbolici è possibile introdurre:
RDC = resistenza ohmica del conduttore nel funzionamento in direct current,
ossia in regime continuo;
RAC = resistenza ohmica, dello stesso conduttore, in regime alternato, ( alternat
current ).
Si ricordi che la resistenza RAC > RDC ossia, in regime alternato lo stesso conduttore
assume una resistenza maggiore di quella che presenta in regime continuo, ( per il
cosiddetto fenomeno o effetto Pelle ).
Pertanto, è possibile ammettere:
RAC – RDC = RADD.
A questo punto le perdite totali negli avvolgimenti di rame possono essere così
schematizzate:
Pcu = Pj + PADD = RAC I2 = RDC I2 + RADD I2 .
7
In definitiva è come ammettere che: Pcu = RAC I2 ; Pj = RDC I2 ; PADD = RADD I2 .
In conclusione, è possibile ammettere che:
PADD = RADD I2 = Pcu – RDC I2 .
E’ necessario tenere presente, infine, che nelle situazioni reali i comportamenti degli
elementi conduttori sono molto diverse.
Comunque i comportamenti più significativi sono:
al variare della frequenza le perdite principali rimangono costanti, mentre
quelle addizionali aumentano col quadrato della frequenza;
all’aumentare della temperatura le perdite principali aumentano, mentre quelle
addizionali diminuiscono; infatti le prime sono direttamente proporzionali alla
resistività ρ, mentre le seconde sono inversamente proporzionali a ρ stesso.
ESERCIZIO
Sull’avvolgimento di una M E sono state effettuate le seguenti prove:
misura in corrente alternata
Pcu = 350 W e I = 50 A;
misura della resistenza elettrica in regime continuo RDC = 0,112 .
Si calcolino le perdite principali, quelle addizionali e le resistenze RAC , RADD .
Tenendo conto che: Pcu = Pj + PADD = RAC I2 = RDC I2 + RADD I2 .
Si possono calcolare i valori richiesti dall’esercizio.
RAC = Pcu / I2 = 350 / ( 50 )2 = 0,14 ;
RADD = RAC – RDC = 0,14 – 0,112 = 0,028 ;
PADD = RADD I2 = 0,028 ( 50 )2 = 70 W;
Pj = RDC I2 = 0,112 ( 50 )2 = 280 W.
Verifica: Pj = Pcu – PADD = 350 – 70 = 280 W, c.v.d.
LE PERDITE NEI NUCLEI MAGNETICI
Le perdite nel ferro o nei circuiti magnetici, come già anticipato, dipendono da due
particolari fenomeni:
le perdite per ciclo di isteresi e le perdite per correnti parassite o di Foucault.
Queste perdite si manifestano solo se i nuclei magnetici o
ferromagnetici sono soggetti a flussi variabili nel tempo.
Nel caso di flusso magnetico costante tali perdite sono nulle.
Le perdite per ciclo di isteresi dipendono dai seguenti fattori:
dal tipo di materiale;
dalla frequenza;
valore dell’induzione massima Bm.
Tutto questo si può sintetizzare con la formula di Steinmetz:
Pci = Ki f ( Bm )n,
8
con l’indice n uguale a 1,6 se Bm è minore di 1 Tesla, oppure
n = 2 se Bm è maggiore o uguale ad 1 Tesla.
NB.
1 T = 1 Wb / m2.
Le perdite per correnti parassite dipendono dal fatto che i circuiti magnetici sono
realizzati con lamierini di ferro o leghe di ferro. Questi lamierini quindi sono, a tutti
gli effetti, dei conduttori di corrente elettrica, ( anche se pessimi ). Proprio le
variazioni di flusso magnetico determinano in essi delle tensioni indotte e
conseguentemente, delle correnti indotte. Le correnti tendono a scaldare, ( per la
legge di Joule ), i lamierini, ( poiché incontrano una resistenza al loro passaggio ).
Pertanto, il riscaldamento dei lamierini comporta una perdita sottoforma di calore. In
poche parole, per ovviare a questo inconveniente, il nucleo magnetico si ottiene dalla
sovrapposizione di un certo numero di lamierini, isolati l’uno rispetto all’altro, con
uno spessore ridotto. Spesso, nella lega, si inserisce del silicio, in opportuna
percentuale, ( il silicio, nella lega non può mai essere superiore al 4% o al massimo il
4,5 % , infatti esso ha la tendenza ad infragilire la lamiera. Il silicio però occorre per
aumentare la resistività del lamierino stesso ).
In definitiva, se un circuito magnetico è costituito da n lamierini, di spessore s e
resistività ρ le perdite per correnti parassite assumono il seguente valore:
Pcp = n Kl s2 f2 ( Bm )2 = Ke f2 ( Bm )2.
Ovviamente risulterà:
relazione A)
PFE = Pci + Pcp = Ki f ( Bm )n + Ke f2 ( Bm )2
CIFRA di PERDITA
Se si sommano le perdite per ciclo di isteresi e per correnti parassite si ottiene la
perdita nel ferro totale. Quest’ultima, però, è riferita all’unità di volume o di
massa. In questo caso si parla di perdite specifiche del lamierino ferromagnetico.
Queste perdite si ottengono impiegando l’apparecchio di Epstein. Con l’apparecchio
di Epstein si rileva la somma delle perdite per ciclo di isteresi e per correnti parassite
in condizioni specifiche o predeterminate, ossia applicando una sollecitazione o
un’induzione magnetica, di tipo sinusoidale, a 50 Hz. Inoltre, il valore dell’induzione
massima, ossia Bm, risulta essere predeterminato. Il valore di Bm in questa prova è 1
Tesla oppure 1,5 Tesla. La perdita così rilevata costituisce un valore caratteristico di
ogni materiale ferromagnetico, che viene indicato col nome di cifra di perdita, cP.
Ora se indichiamo con B0 l’induzione massima, nella valutazione del cP0, di un
materiale ferromagnetico, allora considerando n = 2 potremo scrivere , la relazione A:
cP0 = Ki f ( B0 )2 + Ke f2 ( B0 )2= ( B0 )2 f ( Ki + Ke f ).
Mentre, per un valore di induzione Bm qualsivoglia potremo scrivere:
cPS = Ki f ( Bm )2 + Ke f2 ( Bm )2 = ( Bm )2 f ( Ki + Ke f ).
Se effettuiamo il rapporto membro a membro, fra la seconda e la prima otterremo:
9
cPS / cP0 = (( Bm )2 f ( Ki + Ke f ) ) / (( B0 )2 f ( Ki + Ke f )) = ( Bm / B0 )2.
In definitiva si può ammettere che:
cPS / cP0 = ( Bm / B0 )2.
Questa relazione è utile poiché se è nota la cP0 , B0 e Bm, siamo in grado di
determinare la perdita specifica, della lamiera ferromagnetica, per un valore di
induzione Bm qualsiasi; infatti risulterà:
relazione B) cPS = cP0 . ( Bm / B0 )2.
Si ricordi che la cifra di perdita cPS è riferita, in genere, a lamiere vergini o appena
uscite dalla fabbrica, perciò risulta necessario prevedere un aumento compreso fra il
5% e 10%, della perdita complessiva, per tenere conto dell’invecchiamento del
materiale o per il trattamento meccanico da esse ricevuto durante le lavorazioni.
ESERCIZIO
Un nucleo magnetico di massa M = 50 Kg è realizzato con
materiale ferromagnetico, avente una cifra di perdita cP0 = 1,5
W / Kg se l’induzione nella prova, con l’apparecchio di
Epstein, vale 1 T. Si calcoli la sua perdita specifica e la perdita
nel ferro totale, se l’induzione di lavoro vale 1,2 T.
Per quanto detto in precedenza, la perdita specifica per unità di massa, si può
determinare applicando la relazione B:
cPS = cP0 . ( Bm / B0 )2 = 1,5 ( 1,2 / 1 )2 = 1,5 ( 1,2 )2 = 2,16 W / Kg.
La perdita complessiva del ferro si ottiene moltiplicando questo valore per il valore
della massa M del materiale ferromagnetico. In questo caso risulterà:
PFE = M cPS = 50 ( 2,16 ) = 108 W.
Prevedendo un aumento dell’8% per tenere conto dell’invecchiamento del materiale,
potremo ammettere che la perdita complessiva di questo materiale ferromagnetico
sia:
PFE tot = 1,08 . PFE = 1,08 . 108 = 116,64 W.
PERDITE NEGLI ISOLANTI
Esistono perdite anche negli isolanti delle M E, che per il momento trascureremo. Si
possono tenere conto nel computo delle perdite addizionali.
PERDITE MECCANICHE
Nelle macchine rotanti è necessario tenere conto delle perdite di tipo meccanico, che
si manifestano per i seguenti motivi:
perdite per attrito, nei cuscinetti di supporto dell’albero motore, che
dipendono dal tipo di cuscinetto stesso, dal peso della parte rotante e dalla
velocità di rotazione;
10
perdite per ventilazione, ossia per attrito fra rotore e l’aria circostante, essa è
proporzionale al cubo della velocità di rotazione;
perdite per attrito fra spazzola e collettore, per le macchine in corrente
continua, per effetto dello strisciamento delle spazzole. Queste perdite sono
proporzionali alla superficie di contatto, alla pressione della spazzola sul
collettore ed alla velocità di rotazione.
RENDIMENTO EFFETTIVO E CONVENZIONALE DI UNA M E
Il concetto di rendimento lo abbiamo già introdotto, come rapporto fra la potenza di
uscita o utile o resa e la potenza di ingresso o assorbita della macchina, cioè
η = Pu / Pa.
Questo è il cosiddetto rendimento effettivo della M E.
Il rendimento percentuale si ottiene moltiplicando per 100 il valore di η, ossia:
η% = 100 η = 100 Pu / Pa = 100 ( 1 – Pp / Pa ).
E’ altrettanto vero che sarà:
η = Pu / Pu + Pp = ( dividendo sia numeratore che denominatore per Pu ) =
η = 1 / ( 1 + ( Pp / Pu )), da cui si deduce che,
η% = 100 / ( 1 + ( Pp / Pu )).
ESERCIZIO
Caso a)
Caso b)
Caso c)
Calcolare il rendimento percentuale delle seguenti macchine:
a) trasformatore con Pu = 850 W e Pa = 1 kW;
b) motore elettrico con Pa = 3400 W e Pp = 350 W;
c) generatore elettrico con Pu = 120 kW e Pp = 3,6 kW.
In questo caso possiamo calcolare direttamente il rendimento
η = Pu / Pa = 850 / 1000 = 0,85, ossia η% = 85% ;
Qui è necessario dedurre la potenza utile, come:
Pu = Pa – Pp = 3400 – 350 = 3050 W, da cui si deduce che,
η = Pu / Pa = 3050 / 3400 = 0,897 da cui si ha η% = 89,7% ;
in questo caso è necessario risalire alla potenza assorbita dalla macchina.
Ciò si ottiene tenendo conto che:
Pa = Pu + Pp = ( 120 + 3,6 ) = 123,6 kW e da ciò si ottiene,
η = Pu / Pa = 120 / 123,6 = 0,971 circa e quindi η% = 97,1% .
CENNO SULLE CURVE DI RAFFREDDAMENTO E RISCALDAMENTO
DELLE M E. TIPI DI SERVIZIO
= temperatura
r
regime termico
I tipi di servizio sono
normalizzati. I più
significativi sono quello
continuo e quello
intermittente
11
A
t = tempo
curva di riscaldamento
curva di raffreddamento
POTENZA NOMINALE E DIAGRAMMA DI CARICO
Una macchina elettrica, per tutto il periodo di funzionamento, non lavora mai a
potenza costante. Facendo riferimento ad un periodo di tempo prefissato ed alla
potenza utile Pu, il diagramma cartesiano che descrive l’andamento della potenza in
funzione del tempo, si dice diagramma di carico. L’andamento del diagramma di
carico dipende dalla modalità con la quale la macchina viene impiegata nel periodo di
tempo considerato. Un esempio potrebbe essere il seguente:
Pu
P2
P1
P3
t1
t2
t3
t
L’andamento del diagramma di carico ha influenza sul comportamento termico della
M E, poiché il valore della potenza utile della macchina, risulta legato alla potenza
perduta o dissipata. Infatti, noi sappiamo che:
η = Pu / Pa = Pu / ( Pu + Pp) = Pu + Pp – Pp / Pu + Pp = 1 – Pp / Pa, di conseguenza
posso scrivere Pp / Pa = 1 – η
Pp = Pa ( 1 – η ) = che posso anche scrivere =
Pp = Pu ( Pa / Pu ) (1 – η ) = ( Pu / Pu / Pa ) ( 1 – η ), ma Pu / Pa corrisponde a 1 / η e
di conseguenza potremo scrivere,
Pp = Pu ( 1 – η ) / η.
Quest’ultima relazione mette in luce il legame diretto fra potenza perduta e potenza
utile, ed il coinvolgimento del rendimento nella medesima relazione.
Si tenga presente che per ogni macchina elettrica, fra i dati di targa, viene indicata la
potenza nominale Pn. La potenza nominale Pn rappresenta la potenza che la
macchina può erogare, in condizioni specifiche di funzionamento elettrico,
meccanico e di servizio, senza che essa superi i limiti termici ammessi dalle norme,
in relazione alla classe di isolamento per la quale essa risulta costruita.
Viene poi indicato col nome di fattore di carico o di utilizzazione il seguente
rapporto:
Ku = Pu / Pn = potenza utile / potenza nominale.
Il fattore di carico percentuale, Ku %, risulta allora dato da:
Ku % = 100 Ku = 100 Pu / Pn.
A seconda del valore del fattore di carico Ku si possono avere i seguenti tipi di
funzionamento:
12
se Ku = 1
Pu = Pn e ciò implica il funzionamento nominale o
a carico nominale;
se Ku < 1
Pu < Pn e ciò implica un funzionamento sotto
carico o a carico ridotto;
se Ku > 1
Pu > Pn e ciò implica un funzionamento in
sovraccarico.
ESERCIZIO
Un motore elettrico di potenza nominale Pn = 20 kW ha un
ciclo di funzionamento di otto ore, con le seguenti modalità:
4 ore con Ku % = 80% e rendimento η1 = 0,80;
2 ore con Ku % = 100% e rendimento η2 = 0,90;
2 ore con Ku % = 120% e rendimento η3 = 0,75.
Si disegni il diagramma di carico e quello delle potenze
Perdute.
Prima di procedere alla costruzione dei due diagrammi, effettuiamo alcune
considerazioni di mero calcolo numerico. Noi sappiamo che per definizione:
Ku % = 100 Ku e di conseguenza Ku = Ku % / 100, perciò sarà,
Ku1 = 80 / 100 = 0,8; Ku2 = 100 / 100 = 1; Ku3 = 120 / 100 = 1,2.
Si noti che il primo fattore di carico ci indica che la macchina lavora in regime di
carico ridotto, nel secondo a carico nominale ed infine, nel terzo lavora in regime di
sovraccarico. Inoltre, sapendo che Ku = Pu / Pn si desume che:
Pu = Ku Pn.
Nel nostro caso si ricava che:
Pu1 = Ku1 Pn = 0,8 . 20 kW = 16 kW;
Pu2 = Ku2 Pn = 1 . 20 kW = 20 kW ;
Pu3 = Ku3 Pn = 1,2 . 20 kW = 24 kW;
Infine, tenendo conto che : Pp = Pu ( 1 – η ) / η si ottiene che nei tre funzionamenti di
macchina indicati, le potenze rispettivamente perdute saranno:
Pp1 = Pu1 ( 1 – η1 ) / η1 = 16 ( 1 – 0,8 ) / 0,8 = 4 kW ;
Pp2 = Pu2 ( 1 – η2 ) / η2 = 20 ( 1 – 0,9 ) / 0,9 = 2,22 kW;
Pp3 = Pu3 ( 1 – η3 ) / η3 = 24 ( 1 – 0,75 ) / 0,75 = 8 kW .
Pu (kW)
Pp ( kW)
8
24
20
4
16
2,22
13
4 6
8
t (ore)
4
6
8 t ( ore)
TRASFORMATORE IDEALE
Il trasformatore è una macchina elettrica di tipo statico, ossia tale macchina non
presenta alcun organo in movimento o nessuna parte rotorica. Il trasformatore fonda
il suo funzionamento, esclusivamente, sull’effetto dell’induzione magnetica. Dal
punto di vista tecnico il trasformatore monofase è costituito da due avvolgimenti
avvolti attorno alle colonne del nucleo magnetico, si veda lo schema di riferimento:
i1
i2
v1
v2
Il lato che viene alimentato con una tensione sinusoidale, normalmente, si indica col
nome di primario, mentre l’altro lato si dice semplicemente secondario, ( ma essa è
una macchina reversibile, poiché posso alimentare indifferentemente sia l’uno che
l’altro ).
Il flusso magnetico prodotto dal lato alimentato, investe gli avvolgimenti costituenti il
secondario, producendo una tensione e conseguentemente un corrente indotta.
Il valore sia della tensione indotta primaria che secondaria dipende dal flusso e dal
numero di spire che costituiscono i due stessi avvolgimenti.
Ne risulta allora che:
E1 = E1m / √ 2 = N1 m / √ 2 = 2 f N1 m / √ 2 = = 4,44 f N1 m;
E2 = E2m / √ 2 = N2 m / √ 2 = 2 f N2 m / √ 2 = = 4,44 f N2 m.
Inizialmente tratteremo del trasformatore ideale, poiché le semplici considerazioni
su di esso, ci aiuteranno a comprendere il trasformatore reale.
Nelle condizioni ideali si utilizzano le ipotesi di Kap, che si possono così sintetizzare:
14
gli avvolgimenti sono ideali, ossia la loro resistenza risulta praticamente nulla;
il flusso è ideale, ossia tutte le linee di forza , prodotto dall’avvolgimento
primario, ( che risulta l’avvolgimento alimentato ), si concatena completamente
co l’avvolgimento secondario. In definitiva è come ammettere nullo il flusso
disperso;
il nucleo magnetico è perfetto, ossia è come ammettere che la riluttanza del
circuito magnetico risulta nulla. Ciò ci consente di ammettere che le perdite per
ciclo di isteresi e per correnti parassite siano uguali a zero. Inoltre per la legge
di Hopkinson, Fmm = NI = = 0, per cu la forza magnetomotrice risulta
nulla. Si ricorda che la Fmm è necessaria per creare il flusso magnetico.
Conseguenza di questo fatto: applicando la tensione all’avvolgimento primario
sorgerà un flusso magnetico senza necessità di una corrente di
magnetizzazione.
Lo schema grafico del trasformatore ideale è il seguente:
V1
E1
E2
V2
Applicando alle maglie il secondo principio di Kirchoff si deduce:
V1 + E1 = 0
V1 = – E1 ;
V2 – E2 = 0
V2 = E2 .
Nelle condizioni ideali risulta allora che:
V1 = E1 = 4,44 N1 m f;
V2 = E2 = 4,44 N2 m f;
ora se dividiamo membro a membro, ossia se effettuiamo la divisione,
V1 / V2 = E1 / E2 = ( 4,44 N1 m f ) / ( 4,44 N2 m f ) = N1 / N2.
15
In definitiva la quantità V1 / V2 = N1 / N2 = Kt si dice rapporto di
trasformazione del trasformatore.
FUNZIONAMENTO A VUOTO DEL TRASFORMATORE IDEALE
Questa situazione si può schematizzare nel modo seguente
I1 circa zero
I2 = 0
V1
E1
E2
V2
Come si osserva dallo schema di principio, ai morsetti del secondario non è
applicato alcun carico, proprio per questo si parla di funzionamento a vuoto.
La rappresentazione vettoriale di questa situazione si riassume nel modo seguente:
V1 = - E1
V2 = E2
E1
FUNZIONAMENTO A CARICO DEL TRASFORMATORE IDEALE
La situazione è così rappresentabile:
I1 0
I2
16
V1
E1
E2
V2
Zc
In questo caso ai morsetti del secondario risulta applicato un carico con
impedenza Zc. Si capisce che, V2 / Zc = E2 / Zc = I2.
Inoltre visto che deve risultare nulla la forza magnetomotrice totale, ossia la
somma delle f m m prodotte dalle due correnti I1 ed I2 deve essere uguale a zero:
N1 I1 + N2 I2 = 0 da cui si deduce che
I1 = ( - N2 / N1 ) I2.
Conseguentemente il diagramma vettoriale assume la seguente forma:
V1 = - E1
φ1
I1 = ( - N2 / N1 ) I2 = - I2 / Kt
I2
φ2
V2 = E2
E1
Infine, si osserva dal grafico che:
φ1 = φ2.
BILANCIO DELLE POTENZE
Le potenze apparenti nei due lati del trasformatore sono uguali a:
S1 = V1 I1 ed S2 = V2 I2, ma
S2 = V2 I2 = ( V1 / Kt ) ( Kt I1 ) = V1 I1 = S1, in definitiva risulta
S1 = S2, oppure, V1 I1 = V2 I2.
Si noti che V1 / V2 = Kt, di conseguenza V2 = V1 / Kt e dalla relazione in modulo
N1 I1 = N2 I2 si ricava che I2 = ( N1 / N2 ) I1 = Kt I1, ( come indicato nelle
relazioni superiori. Inoltre, visto che φ1 = φ2 e avendo dimostrato che, S1 = S2,
allora si deduce che:
17
P1 = V1 I1 cos φ1 = V2 I2 cos φ2 = P2, ossia P1 = P2,
Q1 = V1 I1sen φ1 = V2 I2 sen φ2 = Q2, ossia Q1 = Q2.
Le potenze attive e reattive sono anch’esse uguali fra loro.
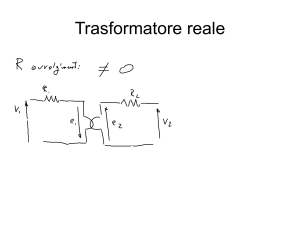
CIRCUITO REALE DI UN TRASFORMATORE MONOFASE
Per descrivere il comportamento reale di un trasformatore è necessario abbandonare
le ipotesi di Kap e tenere conto che:
il rame ha per effetto Joule, in quanto sia la resistenza degli avvolgimenti primari che
secondari, non risulta uguale a zero;
il nucleo del circuito magnetico non possiede riluttanza nulla e pertanto, bisogna
tenere conto delle perdite sia per ciclo di isteresi che per correnti parassite.
Inoltre, visto che il circuito magnetico non ha comportamento ideale è necessario
tenere conto che il flusso totale presenta una parte che viene dispersa all’esterno del
circuito stesso, ( NB. il flusso disperso dipende dal valore dell’induttanza primaria e
secondaria dei due avvolgimenti ).
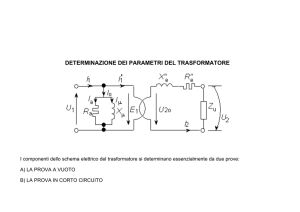
Lo schema equivalente di un trasformatore monofase reale è allora il seguente:
R1
j X1d
V1
R2
jB0
jX2d
V2
G0
E1
E2
I termini o parametri R1, X1d, R2 ed X2d si dicono i parametri longitudinali del
circuito equivalente del trasformatore, mentre G0 e B0 i parametri trasversali.
Dal circuito equivalente di un trasformatore monofase reale si osservi che:
R1 ed R2 sono rispettivamente le resistenze degli avvolgimenti primario e
secondario; X1d e X2d le reattanze di dispersione del primario e del secondario ed
infine, la G0 e la B0 ci occorrono per tenere conto delle perdite per correnti parassite
e per ciclo di isteresi nel ferro.
18
Si conclude questo argomento, ricordando che, complessivamente sarà:
Z1 = R1 + jX1d = impedenza del circuito primario;
Z2 = R2 + jX2d = impedenza circuito secondario .
Ritorniamo un attimo sull’accoppiamento magnetico tra il primario ed il secondario.
Visto che tale accoppiamento non è perfetto possiamo fare queste considerazioni, per
chiarire il concetto di flusso disperso. Possiamo dunque ammettere che il flusso sia
caratterizzato dalle seguenti linee di forza:
I
II
i1
i2
v1
v2
Dalla figura di riferimento si constata che il flusso è così costituito:
tutte le linee di forza che stanno all’interno del nucleo magnetico del
trasformatore, linee di colore blu, ( le quali costituiranno il flusso principale );
tutte quelle linee di forza che concatenano completamente o parzialmente il
solo avvolgimento primario o secondario, vedi linee di forza rosse e verdi. In
altri termini sono quelle linee di forza che si richiudono in aria. Esse
costituiranno ciò che è indicato col nome di flusso disperso.
Normalmente si indica con 0 il flusso principale, rappresentato da tutte le linee di
forza che concatenano contemporaneamente il primario ed il secondario, mentre con
1d e con 2d si indicano rispettivamente, il flusso disperso primario e secondario.
Calcoliamo in modo semplice l’induttanza di dispersione. Noi sappiamo che :
1d = L1d I1 / N1 ed 2d = L2d I2 / N2, di conseguenza
19
L1d = N1 1d / I1;
L2d = N2 2d / I2.
Infine, si ricorda che:
X1d = L1d = 2 f L1d;
X2d = L2d = 2 f L2d.
Il circuito magnetico del trasformatore reale viene pertanto investito da un flusso
variabile nel tempo. La legge di Lenz – Faraday – Neumann dell’induzione, ci
consente di capire che, in queste condizioni, il ferro ha perdite sia per ciclo di isteresi
che per correnti parassite.
Potremo, quindi, effettuare le seguenti considerazioni:
PFE = perdita nel ferro = Massa per perdita specifica per unità di massa = M pFE =
= cP0 ( Bm / B0 )2 = cP0 Bm2 / B02, ma
Bm si può pensare uguale a, Bm = m / SFE, dove SFE è la sezione del ferro effettiva
ed, inoltre, m = E1 / 4,44 f N1 e di conseguenza sarà,
PFE = M (cP0 / B02 ) 2m / S2FE = M (cP0 / B02 ) E12 / S2FE( 4,44 f N1 )2.
Tutte le grandezze che compaiono nella relazione superiore , eccetto la E1, sono
costanti durante il funzionamento del trasformatore, in quanto esse dipendono solo da
fattori costruttivi e dalla frequenza.
Si ricorda che il rapporto:
Potenza / (Tensione)2 = conduttanza = G, perciò il termine
M cP0 / ( B02 S2FE( 4,44 f N1 )2 = G0, di conseguenza sarà,
PFE = G0 E12 =( spesso si ritiene ) = G0 V12.
La legge di Hopkinson ci dice, inoltre, che per magnetizzare il nucleo di ferro, con
riluttanza diversa da zero, è necessaria una forza magnetomotrice. In altri termini
deve risultare:
Fmm = = Ni.
Ipotizzando che il secondario sia aperto, ossia ad esso non sia applicato alcun carico,
quindi risulterà I2 = 0,
possiamo ammettere che:
N1 I = , dove la I è la cosiddetta, corrente di magnetizzazione o
corrente magnetizzante. ( Si noti che la I dipende dalla corrente I1 ).
Ora, è possibile scrivere:
I = / N1 = ( / N1 ) m / √ 2 =
20
= I = ( / √ 2 N1 ) E1 / 4,44 f N1 = ( sapendo che 4,44 = √ 2 ) =
= I = ( / √ 2 N1 ) E1 / ( √ 2 f N1 ) = ( E1 ) / 2 f N12 = ( E1 ) / ( N12 )
Risulta infine che:
I10
Ia
G0
j B0
I
E1
Ia = G0 E1 = componente attiva ; I = componente reattiva = B0 E1.
Si completa il discorso ricordando che:
Y0 = 1 / Z0 = G0 + j B0 , dove Y0 si dice ammettenza, ed essa per definizione è il
reciproco dell’impedenza, mentre G0 è la conduttanza, ( che è il reciproco di una
resistenza ), e B0 si dice suscettanza, ( ed essa è equivalente al reciproco di una
reattanza ). In particolare la Y0 si dice ammettenza trasversale di un trasformatore
reale.
TRASFORMAZIONE DELLE IMPEDENZE
Noi sappiamo che:
V1 / V2 = - E1 / E2 = - Kt
di conseguenza è possibile effettuare la seguente considerazione,
Z1 = V1 / I1 = - Kt V2 / ( - 1 / Kt ) I2 = Kt2 V2 / I2 = Kt2 Z2,
in altri termini, è possibile ridurre o riportare a primario, l’impedenza
secondaria, moltiplicandola per il quadrato del rapporto di trasformazione del
trasformatore. Più precisamente scriveremo:
Z2’ = Kt2 Z2 = Kt2 R2 + j Kt2 X2d,
diremo che Z2’ è l’impedenza secondaria ridotta a primario. Corrispondentemente il
circuito equivalente di un trasformatore reale ridotto a primario è il seguente:
R1
j X1d
R2’
j X2d’
21
V1
jB0
E1
G0
R1 + R2’ = R1 + Kt2 R2 = R1cc;
Si noti pure che:
X1d + X2d’ = X1d + Kt2 X2d = X2cc.
Risulta possibile attuare la trasformazione inversa, ossia riportare a secondario
l’impedenza primaria. Ma come ? Seguiamo lo stesso ragionamento fatto in
precedenza e scriviamo: Z2 = V2 / I2 = ( V1 / Kt ) / Kt I1 = V1 / Kt2 I1 = Z1 / Kt2,
cioè l’impedenza primaria si può ridurre o riportare a secondario, dividendola
per il quadrato del rapporto di trasformazione del trasformatore.
In definitiva risulterà:
Z1” = impedenza primaria ridotta a secondario = Z1 / Kt2 =
= R1 / Kt2 + j X1d / Kt2 = R1” + j X1d”, ed ovviamente
risulterà, R2 + R1” = R2cc e X2d + X1d” = X2cc .
Il circuito equivalente di un trasformatore reale ridotto a secondario assume la
seguente forma:
R2
V1
jX2d
R1”
j X1d”
jB0
G0
NB. Anche la conduttanza G0 e la suscettanza B0 possono essere riportai a
secondario, in modo tale che tutti i parametri, sia longitudinali che trasversali,
possono essere riportati a secondario.
ESERCIZIO
Un trasformatore ideale con tensione V2 = 25 V, alimenta un
carico ohmico – induttivo, con fattore di potenza cosφ2 = 0,8.
Il carico assorbe una corrente I2 = 4 A. Sapendo che il
22
trasformatore è alimentato con una tensione V1 = 230 V, si calcoli
la corrente primaria, l’impedenza del carico e le potenze erogate
al carico. Si calcoli I1, come rapporto fra tensione primaria e
impedenza secondaria riportata a primario.
Quantità note
V2 = 25 V
V1 = 230 V
Valori da ricavare
Kt = N1 / N2 = V1 / V2 =
= 230 / 25 = 9,2
S2 = V2 I2 = 25 . 4 = 100 VA
cosφ2 = 0,8
I2 = 4
senφ2 = 0,6
P2 = S2 cosφ2 =
= 100 ( 0,8 ) =
= 80 W
Q2 = S2 senφ2 =
= 100 ( 0,6 ) = 60 VAR
R2 = P2 / I2² = 80 / 16 = 5
X2d = √ ( Z2² - R2² ) =
√ ( 6,25²- 5² ) = 3,75
Z2 = V2 / I2 = 25 / 4 = 6,25
Z2’ = Kt² Z2 = ( 9,2 )² . 6,25 =
= 529
X2d’ = Kt² X2d =
= ( 9,2 )² . 3,75 = 317,4
R2’ = Kt² R2 = ( 9,2 )² . 5 =
= 423,2
I1 = V1 / Z1 = V1 / Z2’ =
= 230 / 529 = 0,435 A
FUNZIONAMENTO A VUOTO DI UN TRASFORMATORE REALE
Lo schema di principio o il circuito equivalente del trasformatore reale è il seguente:
I10
j X1d
R2
R1
I
jX2d
I2 = 0
Ia
jB0
V1
V2
G0
E1
23
E2
Nel funzionamento a vuoto il primario risulta alimentato alla tensione V1, mentre il
secondario risulta aperto, ossia ai suoi morsetti non è collegato alcun carico,
conseguentemente la corrente secondaria I2 è nulla. Il fatto che la corrente secondaria
sia uguale a zero, ci consente di ammettere che, le cadute di tensione su R2 e su X2d
siano nulle e perciò, in queste condizioni, ai morsetti del secondario la tensione, che
si presenta, risulta identica alla tensione indotta nell’avvolgimento secondario, cioè:
E2 = V20 = V2.
Nel circuito primario, invece, alla tensione V1 fa riscontro una corrente I10, ossia la
corrente primaria a vuoto, ( poiché il secondario è aperto ), il cui valore sarà dato da:
I10 = Y0 E1= I0.
Visto che il modulo della corrente I10 è modesto, è possibile ammettere, senza
commettere errore grave, che le cadute la resistenza e la reattanza di dispersione
primaria, siano trascurabili. Di conseguenza è possibile considerare V1 = E1 e
possiamo così scrivere, I10 = Y0 E1= I0 = Y0 V1, ( a meno del segno ).
Inoltre, la corrente I10 = I0 si può decomporre nelle sue componenti Ia e I,
cosicché risulta: I10 = I0 = Ia + I, dove la Ia si dice componente attiva e la I si
dice componente reattiva o di magnetizzazione.
Ora tenendo conto che la tensione è positiva se il vettore ha senso o verso:
allora ne risulta, Ia = - G0 E1 e I = - jB0 ( - E1 ) = j B0 E1.
Se si considera il secondo principio di Kirchoff, applicato al circuito primario, si può
desumere il diagramma vettoriale di un trasformatore reale durante il funzionamento
a vuoto:
j X1d I10
R1 I10
V1
- E1
I10
Ia
I
E1
V2 = V20 = E2
24
FATTORE DI TRASFORMAZIONE A VUOTO
In questo caso possiamo ammettere che:
K0 = E1 / E2 = V1 / V2 = circa = Kt, in altri termini si ritiene che il rapporto di
trasformazione o il fattore di trasformazione del trasformatore sia circa uguale al
rapporto fra le tensioni primaria e secondaria, che equivale al rapporto N1 / N2, che è
il rapporto spire che è un dato costruttivo della macchina stessa.
BILANCIO DELLE POTENZE
Per quanto riguarda il secondario, visto che la corrente I2 è nulla ne scende che:
S2 = 0,
P2 = 0,
Q2 = 0, in
conclusione non ci sono potenze erogate al carico, per fatto che i morsetti secondari
sono aperti.
Il primario durante il funzionamento a vuoto, assorbe dalla rete le cosiddette potenze
a vuoto, ossia:
S10 = V1 I10 = √ ( P02 + Q02 )
P0 = V1 I10 cosφ0,
Q0 = V1 I10 senφ0.
Osservando il circuito equivalente del trasformatore si può verificare che, la potenza
attiva P0, è somma della potenza dissipata nel rame primario e la potenza perduta nel
ferro del nucleo magnetico. In altri termini potremo scrivere:
P0 = R1 I10² + G0 E1², ma il valore della corrente assorbita
dal trasformatore, durante il funzionamento a vuoto, è molto piccola, perciò la perdita
dissipata nel rame primario è trascurabile e di conseguenza sarà
P0 = G0 E1².
Ciò significa che durante il funzionamento a vuoto, il trasformatore dissipa una
potenza che equivale alla perdita che si verifica nel nucleo magnetico o nel ferro.
La conclusione importante è dunque che:
P0 = PFE = circa = G0 E1² = G0 V1².
E’ altrettanto vero che: Q0 = X1d I10² + B0 E1² = circa = B0 E1²,
in altri termini la potenza reattiva, assorbita dal trasformatore reale durante il
funzionamento a vuoto, è circa uguale a potenza di magnetizzazione del nucleo
ferromagnetico.
PROVA A VUOTO
25
Il costruttore di un trasformatore effettua la prova a vuoto, con lo scopo di ottenere le
seguenti informazioni:
le perdite nel ferro; il fattore di potenza a vuoto cosφ0 = P0 / ( V1 I10 ); il valore
percentuale della corrente a vuoto, I0% = 100 I10 / I1n dove I1n è la corrente
nominale primaria; i valori dei parametri trasversali G0 e B0.
Si tenga presente che: PFE = circa = P0 e Q0 = P0 tgφ0 = PFE tgφ0.
ESERCIZIO
Un trasformatore assorbe nel funzionamento a vuoto, con tensione
V1n = 3000 V, la potenza P0 = 105 W e la corrente I0 = 0,113 A.
Si calcoli la corrente a vuoto percentuale, riferita alla corrente
Nominale I1n = 2,8 A, il fattore di potenza a vuoto ed i parametri
Trasversali G0 e B0.
Quantità note
V1n = 3000 V
I0 = 0,113
P0 = 105 W
Valori da ricavare
I0% = 100 ( 0,113 ) / 2,8 =
cosφ0 = P0 / ( V1 I10 ) =
= 4,04 %
= 105 / ( 3000 . 0,113 ) =
= 0,31
senφ0 = 0,95
G0 = P0/ V1n² =
tgφ0 = 3,07
= 105 / ( 3000 )² =11,7 S
B0 = Q0 / V1n² =
= P0 tgφ0 / V1n² =
= 105 . 3,07 / ( 3000 )² = 35,8 S
FUNZIONAMENTO A CARICO DI UN TRASFORMATORE REALE
Il trasformatore funziona a carico, quando il secondario è collegato ad un carico
avente impedenza Zc.
Lo schema di principio risulta essere il seguente:
I1
j X1d
R1
R2
I
jX2d
I2
Zc
Ia
jB0
V1
V2
G0
E1
26
E2
Ipotizzando che: Zc = Rc + j Xc, possiamo dire che la tensione indotta E2 determina
la circolazione della corrente secondaria I2, da cui si ricava: ( per il secondo principio
di Kirchoff applicato al circuito secondario )
E2 – ( R2 + jX2d ) I2 – ( Rc + j Xc ) I2 = 0, oppure
E2 = (( R2 + Rc ) + j ( X2d + Xc )) I2, da cui deduco
I2 = E2 / (( R2 + Rc )) + j( X2d + Xc )).
L’angolo di sfasamento 2, fra E2 ed I2 si ottiene come:
2 = tg-1 (( X2d + Xc ) / ( R2 + Rc )).
Il modulo del vettore I2 si esprime nel modo seguente:
I2 = E2 / ( √ (( R2 + Rc )² + ( X2d + Xc )²).
Per quanto riguarda il secondario, il secondo principio di Kirchoff, può anche essere
scritto nel modo seguente:
E2 – ( R2 + j X2d ) I2 – V2 = 0, di conseguenza,
V2 = E2 – ( R2 + j X2d ) I2.
Per meglio capire il comportamento del primario, quando al secondario è collegato un
carico, bisogna tenere conto qi questi fatti:
nel passaggio da vuoto a carico il flusso magnetico rimane costante;
l’ipotesi che il flusso rimanga costante, comporta ammettere che, la forza
magnetomotrice totale, in questo passaggio, si mantenga anch’essa costante;
la forza magnetomotrice a vuoto risulta uguale a N1 I10, mentre quella a carico
risulta uguale a: N1 I1 + N2 I2 .
La supposta costanza della forza magnetomotrice totale comporta quindi che risulti:
N1 I1 + N2 I2 = N1 I10, da cui ricavando I1,
N1 I1 = N1 I10 – N2 I2, dividendo ambo i membri per N1, si deduce che,
I1 = I10 – N2 / N1 I2 = I10 – I2 / Kt = I10 + I2’, dove
I2’ = corrente secondaria ridotta a primario.
La I2’ viene anche detta corrente di reazione primaria, ed è il “surplus” di corrente
che deve essere assorbita dai morsetti del primario, per compensare la forza
magnetomotrice secondaria, dovuta alla corrente I2, assorbita dal carico collegato al
trasformatore.
27
Ciò è dovuto al fatto che la forza magnetomotrice totale deve risultare costante, come
precedentemente indicato. Ricordando che: ( applicando Kirchoff al primario )
V1 = R1 I1 + j X1d I1 – E1,
possiamo tracciare il diagramma vettoriale del trasformatore, durante il suo
funzionamento a carico.
Si veda il diagramma nella pagina successiva:
j X1d I1
V1
R1 I1
- E1
I1
I2’
I10
Ia
I
E2
I2
R2 I2
E1
V2
J X2d I2
Questo è il diagramma di un trasformatore a carico.
BILANCIO DELLE POTENZE
Le potenze erogate dal trasformatore al carico, ( sia la potenza apparente, che attiva
e reattiva ), si possono ricavare, ad esempio nota la corrente I2 del secondario, ( e
assorbita dal carico ), nota la tensione V2 ai morsetti del secondario e noto il fattore
di potenza o cosφ2, dalle seguenti relazioni:
28
S2 = V2 I2 = √ ( P2² + Q2² );
P2 = S2 cosφ2 = V2 I2 cosφ2;
Q2 = S2 senφ2 = V2 I2 senφ2 = P2 tgφ2.
Mentre la potenze assorbite dal primario sono date da:
P1 = V1 I1 cosφ1= S1 cosφ1 ; Q1 = V1 I1 senφ1= S1 senφ1 ;
S1 = V1 I1 = √ ( P1² + Q1² ), ed infine si ricorda che Q1 è anche esprimibile come,
Q1 = P1 tgφ1.
Si osserva che: la potenza attiva assorbita dal primario, si può pensare come somma
delle perdite negli elementi resistivi del circuito, dalla potenza erogata al carico e
dalla potenza dissipata nel ferro. In definitiva potremo scrivere:
P1 = R1 I1² + R2 I2² + P2 + PFE = P2 + PCU + PFE = P2 + PCU + G0 (E1)².
Per le potenze reattive vale un discorso analogo, ossia risulterà:
Q1 = X1d I1² + X2d I2² + Q2 + QFE = X1d I1² + X2d I2² + Q2 + P1 tgφ1 =
= X1d I1² + X2d I2² + Q2 + B0 (E1)² = Q2d + Q2 + Q0.
ESERCIZIO
Un trasformatore eroga al carico la potenza S2 = 500VA con
tensione V2 = 25 V, e cosφ2 = 0,8, ( il carico è allora ohmico –
induttivo ). Le perdite nel ferro sono pari a 15 W con cosφ0 = 0,3
ed i parametri dei due avvolgimenti valgono: R1 = 2,27 ,
R2 = 0,0325 , X1d = 4 e X2d = 0,0573 . Calcolare le
Potenze, ( attiva, reattiva ed apparente ), assorbite dal primario,
sapendo che la corrente da esso assorbita vale I1 = 2,3 A.
Quantità note
S2 = V2 I2 = 500 VA
PFE = 15 W = P0
X1d = 4
V2 = 25 V
cosφ0 = 0,3
X2d = 0,0573
I1 = 2,3 A
cosφ2 = 0,8
R1 = 2,27
R2 = 0,0325
Quantità incognite con relativo calcolo per la loro determinazione
I2 = S2 / V2 = 500/ 25 =
senφ2 = 0,6
P2 = S2 cosφ2 =
= 20 A
tgφ2 = 0,75
= 500 . 0,8 = 400 W
Q0 = PFE tgφ0 =
senφ0 = 0,954; tgφ0 = 3,18
Q2 = P2 tgφ2 =
= 15 ( 3,18 ) = 47,7 W
= 400 ( 0,75 ) = 300 VAR
S0 = √( P0²+Q0² ) = 50 VA
PCU1= R1 I1² =
PCU2= R2 I2² =
PCUtot = PCU1+ PCU2 =
= 2,27 ( 2,3 )² = 12 W
= 0,0325 ( 20 )² = 13 W
= 12 + 13 = 25 W
X1d I1² = 4 ( 2,3 )² =
X2d I2² = 0,0573 ( 20 )² = = Q2d = X1d I1² + X1d I1² =
= 21,16 VAR
22,92 VAR
44,08 VAR
Sulla base dei risultati ottenuti si determina infine che:
P1 = PCU1+ PCU2 + P2 + PFE = 12 + 13 + 400 + 15 = 440 W
Q1 = Q2d + Q0 + Q2 = 44,08 + 47,7 + 300 = 391,78 VAR
S1 = √ ( P1² + Q1² ) = 589,14
29
cosφ1 = P1 / S1 = 440 / 589,14 = 0,747, con φ1 = 41,7°
Nelle ipotesi indicate, il primario risulta soggetto alla tensione V1 ottenuta come:
V1 = S1 / I1 = 589,14 / 2,3 = circa = 256,15 V ed il rapporto di trasformazione
risulta circa uguale a,
Kt = V1 / V2 = 256,15 / 25 = 10,246.
Se ne deduce pure che: I10 = I1 – I2/ Kt = 2,3 – ( 20 / 10,246 ) = 0,348 A
Conclusione, ricordando la definizione di rendimento, questo trasformatore risulta
avere
η = P2 / P1 = 400 / 440 = 0,9.
CIRCUITO EQUIVALENTE PRIMARIO
Come abbiamo visto in precedenza è possibile riportare i parametri o tutti a primario
o tutti a secondario. Pertanto, è possibile ricorrere, per un trasformatore reale, o al
circuito equivalente primario o al circuito equivalente secondario.
Ad esempio, sfruttando la possibilità di riportare tutti i parametri del secondario al
primario, è possibile ammettere il circuito equivalente primario, tenendo conto
che, per riportare a primario i parametri del secondario, occorre considerare le
seguenti relazioni:
R2’ = resistenza secondaria ridotta a primario = Kt² R2;
X2d’ = reattanza secondaria riportata a primario = Kt² X2d;
essendo Kt il rapporto di trasformazione del trasformatore.
Il circuito equivalente primario, per quanto detto assumerà la seguente forma:
Lo schema di principio risulta essere il seguente:
I1
j X1d
R2’
jX2d’
R1
I
Zc
Ia
jB0
V1
G0
OPPURE
I1
R1cc
j X1cc
I10
Zc’
V1
Y0
30
Si osservi infine che: R1cc = R1 + R2’ = R1 + Kt² R2 ; Y0 = G0 + j B0 ;
X1cc = X1d + X2d’ = X1d + Kt² X2d;
Zc’ = Kt² Rc + Kt² Xc = Rc’ + j Xc’ .
CIRCUITO EQUIVALENTE SECONDARIO
In modo perfettamente analogo è possibile riportare tutti i parametri a secondario e
realizzare il cosiddetto, circuito equivalente secondario. In questo caso bisognerà
tenere conto delle seguenti relazioni:
R1” = resistenza primaria ridotta a secondario = R1 / Kt² e
X1d” = reattanza primaria ridotta a secondario = X1d / Kt².
Il circuito equivalente, ridotto a secondario, assumerà la seguente forma:
I1
I2’
I2
R2
R1”
J X1d”
jX2d
I10
V2
Zc
Y0
V1
OPPURE
I1
R2cc
I10
j X2cc
I2
Zc
Y0
V1
Si osservi pure che:
V20
V2
R2cc = R2 + R1” = R2 + R1 / Kt² ;
X2cc = X2d + X1” = X2d + X1d / Kt²;
31
I2 = V2 / Zc;
V20 = ( R2cc + j X2cc )I2 + V2 = R2cc I2 + j X2cc I2 + V2.
Si noti anche il seguente schema vettoriale:
NB.
V20
V2
I2
φ2
ESERCIZIO
j X2cc I2
R2ccI2
In questo caso si ritiene V2
con sfasamento nullo, ossia
con forma polare:
V2 = V2 0°
Per un trasformatore, con rapporto di trasformazione a vuoto,
Kt = 20, i parametri longitudinali hanno i seguenti valori:
R1 = 1,85
X1d = 3,5
R2 = 6 m
X2d = 8,5 m
Si calcolino le impedenze equivalenti sia a primario che a
secondario ed i relativi fattori di potenza, ( cosφcc ).
Per circuito equivalente PRIMARIO
Noi sappiamo che:
R1cc = R1 + R2’ con R2’ = Kt² R2 = ( 20 )² . 6 . 10-3 = 2,4 ed
X1cc = X1d + X2d’ con X2d’ = Kt² X2d = 400 . 8,5 . 10-3 = 3,4 .
In conclusione risulterà:
R1cc = R1 + R2’= 1,85 + 2,4 = 4,25
X1cc = X1d + X2d’ =
= 3,5 + 3,4 = 6,9
Sapendo che R1cc = Z1cc cosφ1cc
si ottiene cosφ1cc = R1cc / Z1cc =
= 4,25 / 8,1 = 0,525
Z1cc = √ R1cc² + X1cc² =
√ ( 4,25² + 6,9² = 8,1
Per circuito equivalente SECONDARIO
Noi sappiamo che:
R2cc = R2 + R1” con R1” = R1 / Kt² = 1,85 / 400 = 4,63 . 10-3 ed
X2cc = X2d + X1d” con X1d” = X1d / Kt² = 3,5 / 400 = 8,75 . 10-3 .
In conclusione risulterà:
R2cc = R2 + R1”= ( 6 + 4,63 ) m =
= 10,63 m
X2cc = X1d + X2d’ =
32
Z2cc = √ R2cc² + X2cc² =
= ( 8,5 + 8,75 ) m = 17,25 m
Sapendo che R2cc = Z2cc cosφ2cc
si ottiene cosφ2cc = R2cc / Z2cc =
= 10,63 / 20,26 = 0,525
Ne consegue che:
√ ( 10,63² + 17,25² ) = 20,26 m
φ1cc = φ2cc = cos-1 ( 0,525 ) = 58,33°.
FUNZIONAMENTO IN CORTO CIRCUITO
Un trasformatore funziona in corto circuito quando l’impedenza di carico si può
ritenere praticamente uguale a zero. Questo tipo di funzionamento non è desiderato,
ma risulta una prova a cui viene sottoposto il trasformatore reale per valutare quelli
che sono indicati col nome di parametri di corto circuito; infatti la prova si dice
prova in corto circuito. I parametri di corto circuito forniscono informazioni utili sul
trasformatore stesso. Questo funzionamento può verificarsi nella realtà se il
trasformatore è in guasto o si trova in condizioni di guasto. Lo schema di principio di
questa prova è il seguente:
I1cc
j X1d
R2
R1
jX2cc
I2cc
V2cc = 0
V1cc
E1cc
E2cc
La corrente secondaria, in questo caso, aumenta notevolmente, ( anche fino a trenta
volta la corrente nominale, non essendo limitata dall’impedenza di carico ). Se
aumenta la corrente secondaria aumenta di conseguenza la corrente I1 richiamata dal
primario; infatti rimane pressoché costante la I10, ma aumenta molto la I2’.
Tenendo conto che: I1 = I10 + I2’ si deducono i seguenti grafici fi riferimento:
I1
I2’
I1
I2’
33
I10
notevolmente I2’ aumenta
osserva dai grafici.
A parità di I10 se aumenta
altrettanto fortemente I1, come si
I10
Ovviamente se questo funzionamento perdura nel tempo, il trasformatore si
danneggia, a causa delle notevolissime sollecitazioni termiche ed elettrodinamiche.
Ritenendo trascurabile la corrente I10, nel funzionamento di corto circuito, rispetto la
I2’, nello schema grafico, del trasformatore, è possibile trascurare l’ammettenza Y0,
( peraltro nel nostro schema ciò è già stato attuato ).
Le equazioni simboliche che legano le grandezze elettriche sono le seguenti:
E2cc – ( R2 + j X2cc ) I2cc = 0 e ciò implica,
I2cc = E2cc / ( R2 + j X2cc ) e V2cc per effetto del corto circuito si può ritenere
uguale a zero.
Infine, per quanto detto se ne deduce pure che:
I1cc = I10 – I2cc / Kt = circa = – I2cc / Kt e
V1cc = ( R1 + j X1d ) I1cc – E1cc.
Il diagramma vettoriale del corto circuito assume il seguente aspetto:
j X1d I1cc
V1cc
R1 I1cc
- E1cc
I1cc
I2cc
E2cc
E1cc
34
Anche il caso del corto circuito può essere trattato o riducendo tutti i parametri a
primario o a secondario, come è visibile negli schemi di pagina 35.
Parametri riferiti a primario
I1cc
R1cc
j X1cc
V1
Si noti che: I1cc = V1 / Z1cc da cui I1cc = V1 / √ ( R1cc² + X1cc² ).
Parametri riferiti a secondario
I2cc
R2cc
j X2cc
V20
Si noti che: I2cc = V20 / Z2cc da cui I2cc = V20 / √ ( R2cc² + X2cc² ).
35
L’esercizio precedente ci ha concesso di ricavare i parametri di
corto circuito di un trasformatore. I dati sono così riassumibili:
R1cc = 4,25 ; X1cc = 6,9 ; Z1cc = 8,1 ;
R2cc = 10,6 m; X2cc = 17,25 m; Z2cc = 20,25 m;
Si calcolino i valori delle correnti di corto circuito, nell’ipotesi
che V1 = 5 kV. ( NB. Per esso è Kt = 20 )
Le formule poco superiori ci consentono di ricavare i seguenti valori,
( si veda pagina 36 ):
I1cc = V1 / Z1cc = 5000 / 8,1 = 617,3 A
V20 = V1 / Kt = 5000 / 20
I2cc = V20 / Z2cc = 250 / ( 20,25 . 10-3 ) = 12,4 kA
= 250 V
ESERCIZIO
PROVA IN CORTO CIRCUITO
La prova in corto circuito di un trasformatore, non è eseguita per calcolare le correnti
di corto circuito a primario e a secondario, ma per determinare le correnti nominali
sia del lato primario che secondario, in quanto la prova stessa è condotta applicando
una tensione a primario notevolmente ridotta rispetto alla tensione nominale, ( 5 % 10% ). Proprio per questo in questa prova si indica con:
V1cc la tensione di alimentazione del primario che consente la circolazione
delle correnti I1n, a primario, e I2n, a secondario;
stesso discorso se si alimenta il secondario con la V2cc;
la potenza dissipata Pcc, nella prova in corto circuito, rappresenta la potenza
assorbita dal trasformatore per compensare le perdite che si sviluppano nel
rame del primario, ( PCU1 ) e nell’avvolgimento del secondario, ( PCU2 ).
In altri termini, per quanto scritto risulterà:
Pcc = PCU1 + PCU2 = R1 I1n² + R2 I2n².
Pertanto dalla prova in corto circuito si possono ricavare i seguenti dati:
Z1cc / V1cc / I1n
R1cc = Pcc / I1n²
X1cc = √ ( Z1cc² - R1cc²)
Z2cc / V2cc / I2n
R2cc = Pcc / I2n²
X2cc = √ ( Z2cc² - R2cc²)
cosφcc = Pcc / V1cc I1n
cosφcc = Pcc / V2cc I2n
ESERCIZIO
Dalla prova in corto circuito di un trasformatore sono stati ricavati
i seguenti valori: V1cc = 9,2 V; V2cc = 2 V; Pcc = 35 W;
I1n = 6,5 A ed infine I2n = 30 A. Si calcolino i parametri di corto
circuito primari e secondari ed il fattore di potenza cosφcc.
Quantità note
V1cc = 9,2 V
I1n = 6,5 A
V2cc = 2 V
Pcc = 35 W
I2n = 30 A
Quantità incognite con relativo calcolo per la loro determinazione
36
Z1cc = V1cc / I1n =
= 9,2 / 6,5 = 1,415
Z2cc = V2cc / I2n =
= 2 / 30 = 0,067
cosφcc =
Pcc / V1cc I1n =
= 35 / ( 9,2 . 6,5 ) =
= 0,585
DATI DI TARGA
R1cc = Pcc / I1n² =
= 35 / ( 6,5 )² = 0,828
R2cc = Pcc / I2n² =
= 35 / 30² = 0,039
X1cc = √ ( Z1cc² - R1cc²) =
= √ 1,415² - 0,828² = 1,147
X2cc = √ ( Z2cc² - R2cc²) =
= √ 0,067² - 0,039² = 0,0545
cosφcc =
Pcc / V2cc I2n =
= 35 / ( 2 . 30 ) =
= 0,584 circa
I trasformatori, come tutte le macchine elettriche, sono contraddistinti dai dati di
targa, ossia presentano una targa sulla quale viene riportato non solo il nome dl
costruttore ed il numero di serie della macchina, ma tutti i valori nominali delle
grandezze elettriche che la caratterizzano la macchina e per la quale il costruttore
l’ha costruita. Tali valori vengono ottenuti, dal costruttore, effettuando le prove a
vuoto e di corto circuito.
I dati di targa più significativi sono:
Potenza apparente Sn Tensione nominale primaria Tensione nominale secondaria
V1n
V20n
Frequenza f
Rapporto di Trasformazione Kt
Corrente Nominale Corrente nominale secondaria
I1n = Sn / V1n
I2n = Sn / V20n
P0% = 100 P0 / Sn
P0 = P0% . Sn / 100
I0% = 100 I0 / In
I0 = I0% . In / 100
cosφ0 = P0% / I0%
Vcc % = 100 V1cc / V1n
Vcc % = 100 . V2cc / V20n
V1cc = Vcc% . V1n / 100
V2cc = Vcc% .V20n / 100
Pcc % = 100 . Pcc / Sn
Pcc = Pcc % . Sn / 100
cosφcc = Pcc % / Vcc %
ESERCIZIO
Un trasformatore monofase ha i seguenti dati di targa:
Sn = 7,5 kVA
f = 50 Hz
Kt = 3000 / 230 = 13
V1n = 3000 V
P0% = 1,5 %
Pcc % = 2,7 %
V2n = 230 V
I0 % = 6 %
Vcc % = 4,5 %
Calcolare per esso, i fattori di potenza a vuoto ed in corto circuito,
le perdite nel ferro, nel rame, le tensioni di corto circuito, le
correnti nominali ed i parametri trasversali, considerati sul lato
primario o ad alta tensione ( V1n = 3000 V ).
Quantità incognite con relativo calcolo per la loro determinazione
I1n = Sn / V1n =
I2n = Sn / V20n =
= 7500 / 3000 = 2,5 A
= 7500 / 230 = 32,6
P0 = P0% . Sn / 100 =
cosφ0 = P0% / I0% =
senφ0 = 0,968
= 1,5 . 7500 / 100 =
= 1,5 / 6 = 0,25
= 112,5 W
tgφ0 = 3,873
37
B0 = P0 tgφ0 / V1n² =
= 112,5 ( 3,873 ) / ( 3000 )² =
= 48,4 S
G0 = P0 / V1n² =
112,5 / ( 3000 )² = 12,5 S
Pcc = Pcc % . Sn / 100 =
cosφcc = Pcc % / Vcc %
= 2,7 . 7500 / 100 =
=
= 202,5 W
= 2,7 / 4,5 = 0,6
V1cc = Vcc% . V1n / 100 =
V2cc = Vcc% . V20n / 100 =
= 4,5 . 3000 / 100 = 135 V
= 4,5 . 230 / 100 = 10,35 V
VARIAZIONE DI TENSIONE DA VUOTO A CARICO
La tensione secondaria dipende dal carico, o più precisamente, dalla corrente I2
assorbita dal carico e dal fattore di carico secondario cosφ2. Per studiarne il
comportamento è necessario, ( in realtà per motivi di comodità 9, al circuito
equivalente secondario del trasformatore. Impiegando il circuito equivalente
secondario è possibile dedurre il seguente diagramma vettoriale, ( sono ammesse
alcune linee di costruzione ):
V20
Z2cc I2
C
A
O
φ2 V2
2
j X2cc I2
R2ccI2
B
D
E
Dal diagramma così rappresentato è possibile ricavare le seguenti relazioni:
V20² = OC² = OE² + EC²
dove
OE = OD + DE = V2 cosφ2 + R2cc I2 = V20 cos 2,
EC = EB + BC = V2 senφ2 + X2cc I2 = V20 sen 2,
tg2 = EC / OE = V20 sen 2 / V20 cos 2.
Applicando il principio di Kirchoff si deduce che:
V2 = V20 – ( R2cc + j X2cc ) I2 = V20 – Z2cc I2,
( col metodo simbolico si ottiene V2 ).
Se non si vuole applicare il metodo simbolico e di conseguenza evitare l’uso dei
numeri complessi, si può ricorrere al teorema di Pitagora; infatti
V20² = ( V2 cosφ2 + R2cc I2 )² + ( V2 senφ2 + X2cc I2 )²,
relazione che consente di ricavare V2 o I2 o V20 a seconda delle grandezze note.
Dallo stesso diagramma vettoriale se ne deduce che:
38
2 = tg-1 ( ( V2 senφ2 + X2cc I2 ) / ( V2 cosφ + R2cc I2 ) ).
Si definisce, infine, variazione di tensione da vuoto a carico, la differenza tra i
valori efficaci della tensione a vuoto V20 e della tensione a carico V2:
V = V20 – V2 e di conseguenza, ne risulta che
V20 = V2 + V.
La V rappresenta la caduta di tensione interna del trasformatore, nel passaggio
da vuoto a carico, e solitamente viene espressa in valore percentuale:
V % = 100 V / V20 = 100 ( V20 – V2 ) / V20 = 100 ( 1 – V2 / V20 ).
Un metodo veloce per determinare il valore della caduta di tensione, consiste nel
calcolarla ritenendo trascurabile l’angolo = 2 – φ2. Nella maggioranza dei casi
trascurando questo valore, i valori ottenuti nel calcolo della V, in quasi tutti i casi
pratici, ( per carichi ohmici – induttivi ), e per fattori di potenza compresi fra 0,5 –
0,9 è ottenibile dalla seguente relazione approssimata:
V = circa = I2 ( R2cc cosφ2 + X2cc senφ 2 ).
Introduciamo ora la frazione di carico . Essa rappresenta il rapporto fra la corrente
erogata al carico e la corrente nominale secondaria:
= I2 / I2n.
E’ possibile ora definire la caduta di tensione percentuale, nel passaggio da vuoto a
carico come: V% = circa = ( 100 I2 ( R2cc cosφ2 + X2cc senφ 2 ) ) / V20 =
= V% = ( 100 I2n / V20 ) ( R2cc cosφ2 + X2cc senφ 2 ) =
= V% = ( 100 I2 / V20 ) ( ( Z2cc cosφ2cc ) cosφ2 + ( Z2cc senφ2cc ) senφ2 ) =
= ( 100 I2 / V20 ) ( ( V2cc / I2n ) cosφ2 cosφ2cc ) + ( V2cc / I2n ) senφ2 senφ2cc ).
Ma, noi sappiamo anche che:
cosφ1cc = cosφ2cc = cosφcc,
senφ1cc = senφ2cc = senφcc.
In base a quanto ricordato è possibile ammettere, in definitiva che:
V% = ( 100 / V20 ) ( V2cc / I2n ) I2 ( cosφcc . cosφ2 + senφcc . senφ2 ),
ma tenendo presente che, = I2 / I2n e
che 100 V2cc / V20 = 100 V2cc / V20n = Vcc%, se ne conclude che,
V% = circa = Vcc% ( cosφcc . cosφ2 + senφcc . senφ2 ).
ESERCIZIO
Un trasformatore ha i seguenti dati di targa:
Sn = 7,5 kVA
f = 50 Hz
Kt = 3000 V / 230 V
P0 % = 1,5 %
Pcc % = 2,7 %
I0% = 6 %
Vcc% = 4,5 %
Se ne determini la tensione V2, quando la corrente erogata al carico, ( ohmico –
induttivo ), vale I2 = 30 A a cosφ2 = 0,8. Se ne calcoli anche la caduta di tensione
percentuale.
Quantità incognite con relativo calcolo per la loro determinazione
Kt = 3000 / 230 = 13
cosφ2 = 0,8
V2cc = Vcc% . V20n / 100 =
senφ2 = 0,6
= 4,5 . 230 / 100 = 10,35 V
I2n = Sn / V20n =
Z2cc = V2cc / I2n =
39
= 7500 / 230 = 32,6
= I2 / I2n =
30 / 32,6 = 0,92
cosφcc = Pcc% / Vcc% =
= 2,7 / 4,5 = 0,6
senφcc = 0,8
= 10,35 / 32,6 = 0,3175
R2cc = Z2cc cosφcc =
= 0,3175 . 0,6 = 0,19
X2cc = Z2cc senφcc =
= 0,3175 . 0,8 = 0,254
La caduta di tensione di questo trasformatore si ottiene applicando la relazione:
V = circa = I2 ( R2cc cosφ2 + X2cc senφ 2 ).
Pertanto, inserendo i dati si ottiene per esso:
V = circa = 30 ( 0,19 . 0,8 + 0,254 . 0,6 ) = 9,132 V.
Risulta ovvio che: V2 = V20 – V = 230 – 9,132 = 220,868 V.
La caduta di tensione percentuale sarà allora:
V % = 100 V / V20 = 100 ( 9,132 ) / 230 = 3,97 %
Per questo stesso trasformatore si calcoli la tensione primaria V1, per avere una
tensione secondaria V2, con corrente secondaria I2 = 32,6 e fattore di potenza pari a
0,85, ( il carico risulta ancora ohmico – induttivo ).
La prima operazione da fare è quella di calcolare la V20. La V20 si può determinare
applicando la seguente relazione:
V20 = √ ( V2 cosφ2 + R2cc I2 )² + ( V2 senφ2 + X2cc I2 )²,
dove
V2 = 220 V
cosφ2 = 0,85
senφ2 = 0,527
I2 = I2n = 32,6
R2cc = 0,19
X2cc = 0,254
V20 = √ ( V2 cosφ2 + R2cc I2 )² + ( V2 senφ2 + X2cc I2 )² =
= √( 220 . 0,85 + 0,19 . 32,6 )² + ( 220 . 0,527 + 0,254 . 32,6 )² = 229,7 V
V = V20 – V2 = 229,7 – 220 = 9,7 V
V % = 100 V / V20 = 100 . 9,7 / 229,7 = 4,22% ,
infine, sapendo che Kt = circa = 13, se ne ricava che:
V1 = Kt V20 = 2996 V
CARATTERISTICA ESTERNA DEL TRASFORMATORE
La caratteristica volt – ampermetrica di un trasformatore o la sua caratteristica
esterna, è il grafico cartesiano che rappresenta l’andamento della tensione secondaria
V2 in funzione della corrente I2 erogata al carico.
Nell’ipotesi che la tensione di alimentazione primaria V1 sia costante, per un
determinato valore del fattore di potenza cosφ2, ( ciò implica che anche V20 è
costante, ma anche φ2 è costante ), sarà allora:
V2
V20
V
A V1 = cost.
40
V2
I2
I2
I2n
Un caso particolarmente significativo è il caso in cui φ2 = φ2cc, ossia nel caso in cui
il carico ha un fattore di potenza, pari a quello intrinseco o proprio del,trasformatore,
( è il caso del corto circuito ).
Ebbene in questa situazione risulterà:
V2 = – Z2cc I2 + V20,
la quale rappresenta nel piano cartesiano, l’equazione di una retta con coefficiente
angolare – Z2cc. Tale retta è contraddistinta da due valori notevoli o di particolare
importanza:
a vuoto con I2 = 0 e V2 = V20;
in corto circuito con I2 = I2cc e V20 = 0.
V2
φ2 < 0
V20
φ2 = 0
φ2 > 0
φ2 = φ2cc
I2cc
I2
Caso particolarmente interessante è il caso in cui φ2 < 0, ossia per un carico ohmico
– capacitivo, in cui la tensione secondaria V2 risulta superiore alla tensione a vuoto,
V20, del trasformatore stesso.
PERDITE E RENDIMENTO
In un trasformatore, non essendoci parti in movimento, non vi sono perdite
meccaniche. Ritenendo inoltre trascurabili le perdite dielettriche o negli isolanti, è
possibile ammettere che:
Pp = PFE + PCU = perdite nel ferro + perdite nel rame.
Le perdite nel ferro, applicando la tensione nominale V1n, si possono ritenere uguali
alle perdite misurate durante il funzionamento a vuoto del trasformatore, ossia:
PFE = circa = P0 = G0 V1n².
41
Se al trasformatore fosse applicata una tensione diversa da quella nominale, ( a cui si
riferisse la P0, allora occorre dedurre le perdite nel ferro, attraverso la seguente
relazione:
PFE = circa = P0 ( V1 / V1n )².
Le perdite nel rame si possono, invece, ritenere uguali a:
PCU = circa = Pcc = R2cc I2² = R2cc ( I2n )² = ² R2cc I2n², ma
Pccn = R2cc I2n² e di conseguenza
PCU = circa = ² Pccn.
Il termine , come già sappiamo, rappresenta la frazione di carico con cui lavora il
trasformatore. Al variare della frazione di carico e quindi, della corrente erogata I2,
le perdite nel ferro rimangono costanti, mentre quelle del rame aumentano con legge
parabolica, si veda il grafico di riferimento:
Pfe, Pcu, Pp
0
0,5
1
Il rendimento effettivo del trasformatore si calcola con la seguente relazione:
η = P2 / P1 = P2 / ( P2 + Pfe + Pcu ) =
= V2 I2 cosφ2 / ( V2 I2 cosφ2 + Pfe + Pcu ).
Il rendimento convenzionale può essere anche calcolato, con la relazione:
η = P2 / P1 = η = P2 / ( P2 + P0 + ² Pccn ).
Tenendo conto delle relazioni superiori, è possibile dedurre un grafico del rendimento
η in funzione della frazione di carico .
( In sede di progetto di dimensiona il trasformatore, in modo tale da avere il massimo
rendimento intorno al 70% - 80 % del carico nominale,
ossia per = 0,7 – 0,8 = 1 ).
η
η max
42
0
0,5 1
1
Nel caso di carichi di tipo R – L, il rendimento η diminuisce al calare del fattore di
potenza o del cosφ: ( si veda il grafico sotto riportato quale riferimento a quanto or
ora detto )
η
cosφ2 = 1 = carico puramente resistivo
cosφ2 < 1
Si può anche ammettere:
1 = √ ( P0 / Pccn ), per cosφ2 = 1 o
quando il carico è puramente ohmico.
0
0,5 1
1
Si conclude ricordando che il trasformatore è una macchina ad elevato rendimento;
infatti i trasformatori monofasi possono avere rendimenti maggiori del 90 %, quelli
trifasi si spingono fino al 99 %, ( trasformatori trifasi a grande potenza e con circuito
magnetico a cristalli orientati ).
ESERCIZIO
Per un trasformatore monofase siano i seguenti dati di targa:
Sn = 500 VA
Kt = 230 / 50
P0 = 15 W
Pccn = 20 W
Si calcoli il suo rendimento η, quando lavora a pieno carico, con un fattore di
potenza di valore 0,8 ed ipotizzando una caduta di tensione del 4% della tensione V2.
Determinare anche il suo massimo rendimento ritenendo V2 costante.
Ammettendo il funzionamento a pieno carico con I2 = I2n, possiamo determinare V2
e P2:
V = V% V20n / 100 =
V2 = V20 – V = 50 – 2 =
= 4 . 50 / 100 = 2 V
= 48 V
Se I2 = I2n allora, I2 = Sn / V20n =
P2 = V2 I2 cosφ2 =
= 500 / 50 = 10 A
= 48 . 10 . 0,8 = 384 W
43
Con i dati ricavati è possibile dedurre anche il rendimento a pieno carico e soddisfare
alle ulteriori richieste dell’esercizio:
η = P2 / ( P2 + P0 + Pccn ) =
1 = √ ( P0 / Pccn ) =
= 384 / ( 384 + 15 + 20 ) =
η % = 91,6 %
= √ ( 15 / 20 ) = 0,866
= 384 / 419 = 0,916
cosφ2 = 1
ηMAX = P2 / ( P2 + P0 + 1 Pccn² ) =
I2 = 1 I2n = 0,866 ( 10 ) = P2 = V2 I2 cosφ2 =
= 415,7 / ( 415,7 + 15 +( 0,866²) 20 ) =
= 48 . ( 8,66 ) . 1 =
= 8,66 A
= 415 / 445,7 = 0,933
= 415,7 W
ηMAX % = 93,3 %
Concludiamo questa parte di teoria, sul trasformatore monofase, con un esercizio dato
agli allievi nella prova del 2010.
ESERCIZIO
Un trasformatore abbia i seguenti dati di targa:
Sn = 220 kVA
f = 50 Hz
Kt = 4800 / 400 = 12
P0% = 1,2 %
R1 = 1,95
X1d = 4,5
I0% = 8 %
R2 = 8 m
X2d = 12 m
Pcc = 3,2 %
Vcc% = 4 %
cosφ2 = 0,8 ; senφ2 = 0,6
Si calcolino:
1)
i parametri dell’impedenza equivalente primaria e secondaria;
2)
la corrente di corto circuito primaria e secondaria, ( I1cc ed I2cc );
3)
le perdite nel ferro ed il corrispondente fattore di potenza cosφ0, le perdite nel
rame, la tensione di corto circuito primaria e secondaria, ( I1cc ed I2cc ), la
corrente nominale primaria e secondaria, ( I1n ed I2n ), ed infine i parametri
trasversali G0 e B0;
4)
la caduta di tensione V e la corrispondente caduta di tensione percentuale
V% ;
5)
il rendimento η.
R1cc = R1 + R2’ =
R2cc = R2 + R1” =
I1n = Sn / V1n =
-3
= 1,95 + ( 12² ) . 8 . 10 = = 220000 / 4800 = 45,83 A
= 8 . 10-3 + ( 1,95 / 12²) =
= 1,95 + 1,152 = 3,102
= 21,5 m
X1cc = X1 + X2d’ =
X2cc = X2 + X1d” =
I2n = Sn / V20n = ( I2 ) =
-3
= 4,5 + ( 12² ) . 12 . 10 =
= 12 . 10-3 + ( 4,5 / 12²) =
= 220000 / 400 = 550 A
= 4,5 + 1,728 = 6,228
= 43,2 m
Z1cc = √ 3,102² + 6,228² =
cosφcc = R1cc / Z1cc =
Z2cc = √ 21² + 43,2² =
= 3,102 / 6,96 = 0,446
= 6,96
= 48,2 m
φcc = 63,5°
cosφ0 = P0% / I0% =
P0 = P0% Sn / 100 =
φ0 = 81,4°
= 1,2 / 8 = 0,15
= 1,2 . 220000 / 100 =
sen φ0 = 0,989
= 2640 W
tg φ0 = 6,59
Q0 = P0 tg φ0 =
G0 = P0 / V1n² =
B0 = Q0 / V1n² =
= 2640 . 6,59 = 17397,6
= 2640 / ( 4800 )² =
= 17397,6 / ( 4800 )² =
VAR
= 114,6 S
= 755,1 S
V1cc = Vcc% V1n / 100 = V2cc = Vcc% V20n / 100 =
V = V20n – V2 = circa =
44
= 4 . 4800 / 100 =
= 192 V
= 4 . 400 / 100 = 16 V
Pcc = Pcc% Sn / 100 =
= 220000 . 3,2 / 100 =
= 7040 W
I2cc = V20n / Z2cc =
400 / 48,2 . 10-3 = 8298,75 A
P2 = V2 I2 cosφ2 =
I1cc = V1n / Z1cc =
= 4800 / 6,96 = 689,65 A
V2 = V20n – V =
= 400 – 23,72 = 376,28 V
= ( 376,28 ) 550 ( 0,8 ) =
165563,2 W = 165,56 kW
= I2 ( R2cc cosφ2 + X2cc senφ2 ) =
= 550 ( 0,0215 . 0,8 + 0,0432 . 0,6 ) =
= 550 ( 0,0172 + 0,02592 ) =
= circa = 23,72 V
V % = 100 V / V20n =
= 100 . 23,72 / 400 = 5,93 %
η= P2 / ( P2 + P0 + Pcc ) = in kW =
= 165,56 / ( 165,56 + 2,64 + 7,04 ) =
= 165,56 / 175,24 = 94,5 = η
IL PARALLELO DEI TRASFORMATORI MONOFASE
Il funzionamento in parallelo dei trasformatori viene adottato nel caso di un aumento
notevole della potenza richiesta da un carico o da un impianto in espansione. La
richiesta, durante questa fase di espansione, diviene nettamente superiore a quella che
può fornire un unico trasformatore. Un’altra situazione in cui si utilizza questa
soluzione è quella per garantire il servizio o meglio, la continuità del servizio, in caso
di guasto di un trasformatore. Il parallelo di due macchine avviene collegando i
morsetti primari alle sbarre dell’Alta Tensione e i corrispondenti morsetti secondari
alle sbarre di Bassa Tensione. Utilizzeremo la seguente schematizzazione grafica:
SBARRE DI ALTA TENSIONE
1.1
1.2
1.1
2.1
2.2
2.1
1.2
2.2
SBARRE DI BASSA TENSIONE
Visto che i trasformatori hanno avvolgimenti di alta e di bassa tensione che possono
essere avvolti nello stesso senso oppure in senso tra loro opposto, di conseguenza le
forze elettromotrici indotte possono risultare tra loro in fase oppure in opposizione di
45
fase. La connessione in parallelo, allora, tra due trasformatori monofase, può avvenire
a patto che si colleghino fra loro gli avvolgimenti corrispondenti delle due macchine,
ossia devono avere la stessa polarità, per garantire che le tensioni secondarie siano in
concordanza di fase. Le tensioni secondarie devono risultare in concordanza di fase
per impedire che, nel funzionamento a vuoto, scaturiscano pericolose circolazioni di
correnti. La normativa impone che gli avvolgimenti dei trasformatori monofasi, ( ma
anche quelli trifasi ), siano identificati con un numero progressivo, con obbligo di
marcare con 1 gli avvolgimenti di alta tensione. Se le polarità, indicate dal
costruttore, vengono rispettate, una volta effettuato il parallelo, si evitano di avere
elevate circolazioni di corrente tra i due trasformatori, ( si veda la figura superiore ).
Per analizzare il funzionamento a vuoto di due trasformatori monofasi, collegati in
parallelo si consideri la seguente figura:
SBARRE DI ALTA TENSIONE
I1A
I1B
1.1
TR A
2.1
I2A
1.2
2.2
E2A
1.1
TR B
2.1
j XA”
1.2
2.2
E2B
RB”
I2B
RA”
ZC
j XB”
SBARRE DI BASSA TENSIONE
Il funzionamento in parallelo dei trasformatori monofasi è garantito,anche, per evitare
gravi problemi di riscaldamento degli avvolgimenti e quindi problemi di isolamento,
nelle seguenti condizioni:
funzionanti alla stessa frequenza;
stessa tensione primaria.
In queste condizioni però, la connessione in parallelo determinerà il passaggio o la
circolazione di una corrente a vuoto, nelle maglie dei due circuiti secondari, dati dalla
legge di OHM:
IC0 = ( E2A – E2B ) / ( ZA” + ZB” ),
46
questa corrente è tanto più grande quanto più lo è la differenza fra le tensioni
secondarie e quanto più piccola la differenza fra le impedenze interne delle due
macchine.
In questa situazione, il trasformatore con rapporto di trasformazione a vuoto minore,
erogherà all’altro una potenza. Nel funzionamento a vuoto questo comporterà una
dissipazione di potenza per effetto Joule che si somma a quella nel ferro. In queste
ipotesi, il funzionamento dei due trasformatori in parallelo si può così semplicemente
schematizzare:
vedi nella pagina successiva
XA”
I2A
XB”
I2B
RB”
RA”
E2A
V2
I2
ZC
E2B
Se applica la legge di Ohm alle maglie del circuito superiore si desume che:
E2A = V2 + ZA” I2A,
E2B = V2 + ZB” I2B.
Sottraendo membro a membro le due relazioni precedenti so ottiene:
E2A – E2B = ZA” I2A – ZB” I2B, ma noi sappiamo che,
I2 = I2A + I2B.
Se combiniamo le relazioni precedenti fra loro possiamo esprimere le correnti I2A e
I2B nel modo che vedremo:
E2A – E2B = ZA” I2A – ZB” I2B = ZA” ( I2 – I2B ) – ZB” I2B = ZA”I2 – ( ZA” + ZB” ) I2B
E2A – E2B = ZA”I2 – ( ZA” + ZB” ) I2B
OPPURE
E2A – E2B = ZA” I2A – ZB” I2B = ZA” I2A – ZB” ( I2 – I2A ) = ( ZA” + ZB” ) I2A – ZB” I2
E2A – E2B = ( ZA” + ZB” ) I2A – ZB” I2
47
E DI CONSEGUENZA
I2B = ( – E2A + E2B + ZA”I2 ) / ( ZA” + ZB” );
I2A = ( E2A – E2B + ZB”I2 ) / ( ZA” + ZB” ).
Ora ricordando che: IC0 = ( E2A – E2B ) / ( ZA” + ZB” ), le relazioni superiori possono
venire scritte come:
I2A = IC0 + ( ZB”I2 / ( ZA” + ZB” ));
I2B = – IC0 + ( ZA”I2 / ( ZA” + ZB” )).
INDICANDO CON
IA = ZB”I2 / ( ZA” + ZB” ),
IB = ZA”I2 / ( ZA” + ZB” ),
SE NE CONCLUDE CHE
le frazioni di corrente erogate dai due trasformatori al carico valgono,
I2A = IC0 + IA ,
I2B = – IC0 + IB .
Le relazioni finali mettono in evidenza che la corrente erogata, da ogni trasformatore
al carico è la risultante della corrente di circolazione a vuoto IC0 con quella di carico,
( IA ed IB ), ripartita in ragione diretta alle impedenze secondarie equivalenti dei
trasformatori. Si può osservare che la corrente erogata da ogni trasformatore dipende
dall’impedenza equivalente dell’altro, come per la corrente che si divide su due rami
in parallelo.
Conclusione
Nel parallelo di due trasformatori la corrente erogata al carico, da
ogni trasformatore, dipende dall’impedenza secondaria dell’altro,
quindi in relazione diretta con questa. Il trasformatore con
maggiore impedenza interna, ( ed esso avrà una maggiore
variazione di tensione nel passaggio da vuoto a carico ), erogherà
la corrente minore e ciò può comportare un sovraccarico dell’altro,
ossia di quello con minore impedenza interna.
ESERCIZIO
Due trasformatori monofase sono collegati in parallelo ed
alimentati alla tensione nominale e frequenza nominale,
( 50 Hz ). I dati di targa delle due macchine sono:
TRASFORMATORE A
TRASFORMATORE B
SA = 100 kVA
SB = 50 kVA
V1n = 20 kV
V2n = 20 kV
V20A = 500 V
V20B = 490 V
vccA% = 6,5 %
vccB% = 3,5 %
cosφccA = 0,5
cosφccB = 0,45
La corrente erogata al carico è I2 = 220 – j 180 =
= 284,25- 39,29 A. Determinare la corrente di circolazione a
48
vuoto e le correnti erogate dai due trasformatori al carico.
SOLUZIONE
Inizialmente, procederemo alla determinazione dei parametri del circuito equivalente
secondario, di entrambe le macchine. Il primo calcolo riguarda la determinazione
delle correnti secondarie nominali:
I2nA = SA / V20A = 100000 / 500 =
I2nB = SB / V20B = 50000 / 490 =
= 200 A
= 102,04 A
Calcoliamo di seguito, le tensioni di corto circuito, le impedenze, le resistenze e le
induttanze del circuito equivalente secondario di ciascuna delle macchine:
vccA = ( vccA% V20A ) / 100 =
= 6,5 . 500 / 100 = 32,5 V
ZA” = vccA / I2nA =
= 32,5 / 200 = 0,1625
RA” = ZA” cosφccA =
= 0,1625 . 0,5 = 0,08125
XA” = √ ( ZA”)² - ( RA”)² =
= 0,141
φccA” = cos-1 ( 0,5) = 60°
vccB = ( vccB% V20B ) / 100 =
= 3,5 . 490 / 100 = 17,15 V
ZB” = vccB / I2nB =
= 17,15 / 102,04 = 0,1681
RB” = ZB” cosφccB =
= 0,1681 . 0,45 = 0,07564
XB” = √ ( ZB”)² - ( RB”)² =
= 0,150
φccB” = cos-1 ( 0,45) = 63,26°
Noi sappiamo che la corrente di circolazione a vuoto si determina dalla seguente
relazione:
IC0 = ( E2A – E2B ) / ( ZA” + ZB” ),
da cui nel nostro caso si otterrà,
IC0 = ( 500 – 490 ) / ( 0,08125 + j 0,141 + 0,07564 + j 0,150 ) =
= 10 / ( 0,15689 + j 0,291 ) = ( 10 0 ) / ( 0,3306 61,67 ) = 30,25 - 61,67 =
= 14,355 – j 26,627 A.
Le correnti erogate dai due trasformatori si ottengono, invece, attraverso le seguenti
relazioni:
I2A = IC0 + ( ZB”I2 / ( ZA” + ZB” ));
I2B = – IC0 + ( ZA”I2 / ( ZA” + ZB” )).
Conseguentemente otterremo:
I2A = (14,355 – j 26,627) + ((0,168163,26) / (0,330661,67 )) . (284,25- 39,29) =
= ( 14,355 – j 26,627 ) + 144,532 - 37,7 ° =
= 14,355 – j 26,627 + 114,357 – j 88,385 = 128,71 – j 115 =
= 172,6 - 41,78 A;
I2B = (-14,355 + j 26,627) + ((0,162560) / (0,330661,67 )) . (284,25- 39,29) =
(-14,355 + j 26,627) + 139,72 - 40,96 =
49
= - 14,355 + j 26,627 + 105,512 – j 91,6 = 91,16 – j 65 =
= 111,96 - 35,5 A.
Dai risultati ottenuti, si può osservare che il trasformatore A eroga una corrente
minore della sua corrente nominale, ( 200 – 172,6 = 27,4 A in meno. Circa il 13,7 %
in meno della sua corrente nominale reale ).
Mentre, il trasformatore B eroga una corrente maggiore di quella nominale, ossia
111,96 – 102,04 = 9,92 A in più della sua corrente nominale reale. La corrente
erogata dal trasformatore B, è dunque circa del 9% maggiore di quella nominale,
pertanto esso risulta leggermente sovraccaricato.
ESERCIZIO
Si supponga che i dati di targa siano i seguenti:
TRASFORMATORE A
TRASFORMATORE B
SA = 100 kVA
SB = 50 kVA
V1n = 20 kV
V2n = 20 kV
V20A = 500 V
V20B = 490 V
vccA% = 6,5 %
vccB% = 6,5 %
cosφccA = 0,5
cosφccB = 0,5
SOLUZIONE
In questo caso ne risulterà:
I2nA = SA / V20A = 100000 / 500 =
= 200 A
vccA = ( vccA% V20A ) / 100 =
= 6,5 . 500 / 100 = 32,5 V
ZA” = vccA / I2nA =
= 32,5 / 200 = 0,1625
RA” = ZA” cosφccA =
= 0,1625 . 0,5 = 0,08125
XA” = √ ( ZA”)² - ( RA”)² =
= 0,141
φccA” = cos-1 ( 0,5) = 60°
I2nB = SB / V20B = 50000 / 490 =
= 102,04 A
vccB = ( vccB% V20B ) / 100 =
= 6,5 . 490 / 100 = 31,85 V
ZB” = vccB / I2nB =
= 31,85 / 102,04 = 0,312
RB” = ZB” cosφccB =
= 0,312 . 0,5 = 0,156
XB” = √ ( ZB”)² - ( RB”)² =
= 0,270
φccB” = cos-1 ( 0,5) = 60°
Inoltre risulterà:
IC0 = ( E2A – E2B ) / ( ZA” + ZB” ) =
( 10 0 ) / ( 0,08125 + j 0,141 + 0,156 + j 0,27 =
= ( 10 0 ) / ( 0,237 + j 0,411 ) =
= ( 10 0 ) / 0,474 60,03 =
= 21,1 - 60,03 A = 10,54 – j 18,28 A;
I2A = IC0 + ( ZB”I2 / ( ZA” + ZB” )) =
( 10,54 – j 18,28 ) + ((( 0,31260 ) / (0,474 60,03)) 284,25- 39,29 ) =
(10,54 – j 18,28) + 187,1 - 39,32 =
50
= 10,54 – j 18,28 + 144,744 – j 118,56 = 155,28 – j 136,84 =
= 207 - 41,39 A;
I2B = = – IC0 + ( ZA”I2 / ( ZA” + ZB” )) =
= (- 10,54 + j 18,28 ) + ((( 0,162560) / (0,474 60,03)) 284,25- 39,29 ) =
= (- 10,54 + j 18,28 ) + 97,45 - 39,32 =
= - 10,54 + j 18,28 + 75,39 – j 61,75 = 64,85 – j 43,47 =
= 78,1 - 33,83 A.
In questo caso il trasformatore B eroga una corrente compatibile con la sua corrente
nominale, mentre il trasformatore A è lievemente sovraccaricato.
Comunque, la ripartizione della corrente di carico, avviene in ragione diretta alla
potenza nominale delle macchine, infatti risulta:
IA = ZB”I2 / ( ZA” + ZB” ) =
= ((( 0,31260 ) / (0,474 60,03)) 284,25- 39,29 ) =
= 187,1 - 39,32;
I2B = = ZA”I2 / ( ZA” + ZB” ) =
= ((( 0,162560) / (0,474 60,03)) 284,25- 39,29 ) =
= 97,45 - 39,32.
Infine, si nota che:
IA / IB = 187,1 / 97,45 = circa a 2,
COME
SA / SB = 100 / 50 = 2.
Si ricordi che, il PARALLELO PERFETTO, si ottiene quando i trasformatori
soddisfano le seguenti condizioni:
esiste una corrispondenza tra i morsetti primari e secondari;
sono costruiti per la stessa frequenza;
hanno lo stesso rapporto di trasformazione a vuoto, ossia hanno la stessa
tensione primaria e secondaria a vuoto;
hanno la stessa tensione di corto circuito;
hanno lo stesso fattore di potenza di corto circuito.
51
In queste condizioni i trasformatori, posti in parallelo, non danno luogo a correnti di
circolazione a vuoto significative ed, essi si ripartiscono equamente il carico, o
meglio in ragione diretta alla loro potenza nominale. Vista la non possibilità di creare,
dal punto di vista costruttivo, trasformatori con caratteristiche identiche, solitamente
non si pongono in parallelo trasformatori con un rapporto fra potenze nominali
superiore a 3.
AUTOTRASFORMATORE MONOFASE
L’autotrasformatore è un particolare trasformatore, dotato di un unico avvolgimento,
con il quale si ottengono il lato primario e secondario mediante una presa intermedia
o più prese se si vuole modificare il rapporto di trasformazione. Per ottenere i due
valori distinti della tensione si collegano i due lati in modo tale che a ciascuno di essi,
corrisponda un numero diverso di spire della bobina. Anche l’autotrasformatore può
essere o abbassatore di tensione o elevatore di tensione.
Il caso dell’autotrasformatore abbassatore lo schema di principio è il seguente:
N1 – N2
V1
N1
V2
N2
essendo N2 < N1 di conseguenza risulterà V2 < V1.
Nel caso l’autotrasformatore sia elevatore di tensione lo schema di principio è,
invece, il seguente:
N2 – N1
V1
N2
N1
52
V2
essendo N2 > N1 di conseguenza risulterà V2 > V1.
Come si osserva dallo schema, nel caso di autotrasformatore abbassatore, il primario
è collegato alle spire totali dell’avvolgimento, mentre il secondario è connesso ad una
sola parte di esso. Nel caso di elevatore di tensione, è il secondario che è collegato
all’avvolgimento totale, mentre il primario ad una sua parte.
Il vantaggio dell’autotrasformatore, è sostanzialmente legato al fatto che, esso si
possa dimensionare per una potenza minore di quella che viene erogata
effettivamente a secondario. Proprio per questa ragione che esso ha dimensioni più
contenute, rispetto ad un trasformatore. Questo pregio è molto importante per
macchine di elevata potenza. Lo svantaggio fondamentale è che i due avvolgimenti
non sono separati elettricamente, a scapito della sicurezza dell’installatore.
FUNZIONAMENTO A VUOTO
Come per il trasformatore, durante il funzionamento a vuoto, il lato primario
dell’autotrasformatore assorbe la corrente a vuoto I10. In particolare, nel nucleo si
genera il flusso magnetico e vengono indotte le tensioni V1 = E1 e V20 = E2. Inoltre,
la potenza assorbita dalla macchina è all’incirca uguale alle perdite nel ferro.
FUNZIONAMENTO A CARICO
In questa situazione, il primario viene alimentato alla tensione V1, mentre il
secondario è chiuso sul carico, che alimenterà alla tensione V2 e corrente I2.
La corrente I2 è dunque la corrente erogata al carico.
Gli schemi di principio di questo funzionamento, sia nel caso di autotrasformatore
abbassatore che elevatore, sono rappresentati qui di seguito:
I1
I2
N1 – N2
Zc
V1
N1
V2
I
N2
53
I1
N2 – N1
I2
Zc
V1
N2
V2
I
N1
Per ricavare le espressioni delle correnti si deve partire dall’ipotesi che sia nulla la
forza magnetomotrice totale, ossia N1 I1 + N2 I2 = 0. ( Tale ipotesi deve anche
ammettere che sia trascurabile la f.m.m a vuoto N1 I10 ).
Considerando solo il caso dell’autotrasformatore elevatore di tensione, la forza
magnetomotrice totale è la somma vettoriale tra quella sviluppata dalle N1 spire
percorse dalla corrente I e quella prodotta dalle N2 – N1 spire percorse dalla corrente
I2, da cui si otterrà:
N1 I – ( N2 – N1 ) I2 = 0,
N1 I = ( N2 – N1 ) I2, da ciò, I = ( N2 – N1 ) I2 / N1 = ( 1 / Kt – 1 ) I2.
In conclusione si desume che:
I = ( 1 / Kt – 1 ) I2, dove il fattore ( 1 / Kt – 1 ) è positivo essendo Kt < 1.
Inoltre, l’espressione superiore mostra che la corrente I, circolante nelle N1 spire è in
fase con la corrente I2. Infine, la corrente I1 assorbita dalla macchina, tenendo conto
dei versi indicati nella figura della pagina precedente, è data da:
I1 = I + I2 = I2 / Kt – I2 + I2 = I2 / Kt,
la corrente primaria risulta allora in fase con la corrente secondaria I2 e tra l’altro il
rapporto I2 / I1 = Kt come nel caso dei trasformatori.
POTENZE APPARENTI
Ammettendo solo il funzionamento di elevatore, ( comunque le conclusioni sono
analoghe anche nel caso di funzionamento di abbassatore ), la potenza apparente
erogata al carico, detta Potenza passante, si esprime come:
S2 = V2 I2,
mentre la potenza apparente dell’avvolgimento primario, costituito dalle N1 spire
soggette alla tensione V1 e percorse dalla corrente I, è invece,
S1d = V1 I = Kt V2 I = Kt V2 ( 1 / Kt – 1 ) I2 = Kt V2 I2 / Kt – Kt V2 I2 =
= V2 I2 – Kt V2 I2 = ( 1 – Kt ) V2 I2 = ( 1 – Kt ) S2.
La potenza apparente dell’avvolgimento secondario, si calcola come prodotto
della tensione V2 – V1 per la corrente I2, pertanto ne risulta che:
S2d = ( V2 – V1 ) I2 = ( V2 – Kt V2 ) I2 = ( 1 – Kt ) V2 I2 = ( 1 – Kt ) S2.
54
In definitiva, le potenze apparenti dei due lati della macchina sono uguali e perciò si
può scrivere che Sd = S2 ( 1 – Kt ), dove la potenza Sd rappresenta la potenza
apparente di dimensionamento dell’autotrasformatore ed è evidente che essa
risulta minore di quella nominale. Ciò comporta una riduzione delle dimensioni della
macchina rispetto ad un trasformatore tradizionale. Il vantaggio di questa riduzione
risulta tanto più evidente quanto più Kt si avvicina al valore 1; infatti per Kt = 1
risulterebbe Sd = 0 e ciò comporterebbe un trasferimento di potenza diretto fra
primario e secondario senza interessare l’avvolgimento.
Nel caso dell’autotrasformatore abbassatore procedendo in modo perfettamente
analogo, si arriva alle seguenti relazioni, ( dove in questo caso Kt > 1 ):
I = ( Kt – 1 )I1; I2 = Kt I1;
Sd = S2 ( 1 – 1 / Kt ).
ESERCIZIO
Per collegare due fasi di un sistema trifase con V1 = 400 V ad un
carico elettrico funzionante con tensione V2 = 230 V, si impiega
un autotrasformatore monofase. Si calcoli la potenza apparente di
dimensionamento della macchina e la corrente erogata ad un
carico di potenza P2 = 800W con fattore di potenza 0,8, la corrente
primaria e la corrente I nelle spire secondarie.
Le formule richieste per la soluzione sono le seguenti:
I = ( Kt – 1 )I1; I2 = Kt I1;
Sd = S2 ( 1 – 1 / Kt ).
Kt = V1 / V2 =
= 400 / 230 = 1,739
P2 = V2 I2 cosφ2, da cui
V2 I2 = S2 = P2 / cosφ2 =
= 800 / 0,8 = 1000 VA
I2 = S2 / V2 = 1000 / 230 =
= circa = 4,35 A
I1 = I2 / Kt = 4,35 / 1,739 =
= 2,5 A
Sd = S2 ( 1 – 1 / Kt ) =
= 1000 ( 1 – 1 / 1,739 ) =
= 1000 ( 1 – 0,575 ) =
= 425 VA
I = ( Kt – 1 )I1 =
= ( 1,739 – 1 ) ( 2,5 ) =
= circa = 1,85 A
TRASFORMATORE TRIFASE
I trasformatori trifasi vengono utilizzati per collegare due sistemi elettrici a tensioni
distinte. Al secondario di questo trasformatore può essere semplicemente collegato un
carico trifase, o con collegamento triangolo o con collegamento a stella. Questi stessi
trasformatori sono molto impiegati per la trasmissione e la distribuzione
dell’energia elettrica. Il principio di funzionamento di queste macchine è
perfettamente analogo a quello dei trasformatori monofasi, ma queste macchine
hanno anche caratteristiche proprie od esclusive.
TIPI DI COLLEGAMENTO
55
Il modo più semplice, dal punto di vista teorico, per ottenere un trasformatore trifase,
è quello di collegare opportunamente tre unità monofasi. Il modo opportuno di
collegamento, detto poco sopra, equivale a dire che le tre unità devono alla fine
costituire un sistema trifase. Gli schemi di principio che mostrerò, mettono in luce
due condizioni importanti, ossia il collegamento non prevede il neutro oppure
prevede il neutro. Ovviamente, dal punto di vista pratico, il trasformatore trifase è
una macchina unica, con un unico nucleo magnetico e sei avvolgimenti,: tre per sul
lato di Bassa Tensione e tre per il lato di Alta Tensione. Nei due lati gli avvolgimenti
possono poi essere collegati a stella o a triangolo. Adesso mostriamo gli schemi di
principio sopra indicati: ( vedi nella pagina successiva )
TR1
TR2
TR3
56
Il collegamento è privo di neutro ed è il collegamento triangolo – triangolo
TR1
TR2
Centro stella
TR3
In
57
Collegamento triangolo – stella con neutro
Come si osserva dalle figure precedenti, nel collegamento a stella le tre bobine del
lato secondario sono collegati ad un estremo comune, ( morsetto nero di figura
precedente ), ossia al cosiddetto centro stella. In questo caso è possibile avere due
valori di tensione , cioè la tensione di fase e la tensione concatenata. Nella
connessione a triangolo le tre bobine del lato sia primario che secondario sono chiuse
assieme, in modo tale da costituire un circuito chiuso. Normalmente il collegamento a
stella si indica con i seguenti simboli:
Y se il collegamento a stella è a primario,
y se il collegamento a stella è a secondario.
Mentre per il collegamento a triangolo si utilizzano i seguenti simboli:
se il collegamento a triangolo è a primario,
se il collegamento a triangolo è a secondario.
Per il trasformatore trifase esiste un altro tipo di collegamento detto a zig – zag , con
simbolo Z se tale avvolgimento è a primario e z se l’avvolgimento in questione è a
secondario.
Comunque, i trasformatori trifasi impiegati nella tecnica e nell’industria possono
avere i seguenti collegamenti:
Y – y ; - oppure D – d ; - y oppure D – y ; Y - oppure Y – d ; Y – z .
Visto che gli avvolgimenti devono costituire un sistema trifase, senza ombra di
dubbio, possiamo ammettere che le tensioni primarie e secondarie devono definire
una terna simmetrica, in cui le tensioni di ogni fase hanno valori uguali e devono
risultare ordinatamente sfasate di 120°.
Si ricorda che dallo studi dei sistemi trifasi si è visto che:
per il collegamento a stella, le tensioni tra ogni coppia di morsetti, si
dicono tensioni concatenate, il cui valore in modulo E = (√ 3) V, con V
tensione di fase;
per il collegamento a triangolo le tensioni fra i morsetti sono coincidenti
con le tensioni di ogni singola fase, ossia in modulo E = V.
Si osserva, infine, che anche le tensioni concatenate costituiscono una terna
simmetrica.
58
RAPPORTO DI TRASFORMAZIONE
Anche per il trasformatore trifase viene definito, in modo perfettamente analogo a
quello monofase, il rapporto di trasformazione o il rapporto spire N1 / N2:
Kt = N1 / N2 = E1 / E2.
In realtà, per i trasformatori trifasi il rapporto di trasformazione Kt dipende dal tipo di
collegamento impiegato per gli avvolgimenti primari e secondari, pertanto sarà:
Y – y : K0 = V1n / V20n = (√ 3) E1 / (√ 3) E2 = N1 / N2 = Kt, K0 = Kt ;
D – d : K0 = E1 / E2 = N1 / N2 = V1n / V20n = Kt , K0 = Kt ;
Y – d : K0 = V1n / V20n = (√ 3) E1 / E2 = (√ 3) N1 / N2 = (√ 3) Kt, ossia
sarà, K0 = (√ 3) Kt ;
D – y : K0 = V1n / V20n = E1 / (√ 3) E2 = ( 1 / √ 3 ) N1 / N2 = Kt / √ 3,
ossia sarà K0 = Kt / √ 3 ;
Y – z : K0 = V1n / V20n = (√ 3) E1 / ((√ 3 / 2 ) (√ 3) E2 = ( 2 / √ 3 ) Kt, ossia
sarà K0 = ( 2 / √ 3 ) Kt.
CIRCUITI EQUIVALENTI
Lo studio dei trasformatori trifasi può avvenire adottando i circuiti equivalenti
derivanti dal trasformatore monofase. Le regole, per trasferire i parametri, comunque,
sono le stesse di quelle viste nel caso monofase. Nell’ipotesi di considerare un
trasformatore trifase con collegamento stella – stella, ossia, Y – y, i circuiti
equivalenti risultano i seguenti: ( in modo perfettamente analogo si ottengono le altre
situazioni di collegamento )
A
j X1cc
R1cc
a
I1
I2’
I2
C
E1 I10
j X1cc
E2
A
R
R1cc
b
I
B
C
j X1cc
O
R1cc
c
C
Y0
Y0
Y0
59
Questo è il circuito equivalente di un trasformatore trifase ridotto a primario
Nella pagina successiva introdurremo l’altro circuito equivalente.
A
j X2cc
R2cc
I1
I2’
E1 I10
a
I2
E2
R2cc
j X2cc
b
B
R2cc
j X2cc
C
A
R
I
C
O
c
C
Y0
Y0
Y0
Questo schema rappresenta il circuito equivalente, di un trasformatore trifase,
ridotto a secondario
Affinché ci sia equivalenza è necessario rispettare le seguenti condizioni:
Le tensione del trasformatore monofase, essendo le tensioni di fase, dovranno
essere pari a E / (√ 3), essendo la E la corrispondente tensione concatenata;
Le potenze del trasformatore monofase, essendo relative ad una sola fase,
dovranno essere pari a P / 3, essendo P la corrispondenza potenza trifase;
Il rapporto di trasformazione del trasformatore monofase dovrà essere uguale
a quello del trasformatore trifase.
E’ bene tenere presente che i valori percentuali, ossia, P0%, I0%, Vcc%,
Pcc% ed il cosφcc rimangono uguali per entrambi.
60
Consideriamo i seguenti esercizi:
Sia dato un trasformatore trifase con collegamento stella – stella e con K0 = 20.
Si calcoli il valore che dovrebbe avere Kt per avere, nelle diverse configurazioni,
lo stesso rapporto di trasformazione a vuoto.
In questo caso bisogna tenere conto che nelle diverse configurazioni si ha che:
Y – y : K0 = Kt che nel caso in oggetto vale 20;
D – d : K0 = Kt = 20;
Y – d : K0 = (√ 3) Kt che implica Kt = K0 / (√ 3) = 20 / √ 3 = 11,55;
D – y : K0 = Kt / √ 3 da cui Kt = (√ 3) K0 = 20 (√ 3) = 34,64;
Y – z : K0 = ( 2 / √ 3 ) Kt da cui ne segue, Kt = (√ 3) K0 / 2 = 20 (√ 3) / 2 = 17,32.
Calcolare le caratteristiche del trasformatore monofase equivalente ad un
trasformatore trifase avente i seguenti dati di targa:
Sn = 63 kVA
K0 = 6000 / 400 = 15
Pccn = 1200 W
P0 = 225 W
Vcc% = 4 %
I0% = 1,8 %
Per quanto detto poco sopra dovrà risultare:
Sn’ = 63 / 3 kVA =
P0’ = P0 / 3 = 225 / 3 =
Pccn’ = Pccn / 3 =
= 21 kVA
= 75 W
1200 / 3 = 400 W
V1n’ = V1n / (√ 3) =
I0’ % = I0% = 1,8 %
Vcc’ % = Vcc% = 4 %
= 6000 / (√ 3) = 3464,1 V
Ricordiamo, che in un
V20n’ = V20n / (√ 3) =
K0’ = V1n’ / V20n’ =
sistema trifase, risulta :
= 400 / (√ 3) = 230,94 V
= 3464,1 / 230,94 = 15,
ossia
Sn = (√ 3) V1n I1n
K0 = K0’
I0 = ( I0% ) I1n / 100 =
I0’ = (I0’ %) I1n’ / 100 =
= ( I0% / 100) Sn / √ 3 V1n = = ( I0’ % / 100) Sn / V1n =
= (0,018) 63 / ( 6 . √ 3 ) =
= ( 18 . 21 ) / 3464,1 =
= 0,109 A
= 0,109 A
POTENZE, PERDITE E RENDIMENTO
Per un trasformatore trifase, funzionante in regime sinusoidale simmetrico ed
equilibrato, le potenze erogate al carico sono espresse dalle relazioni seguenti:
S2 = (√ 3) V2 I2;
P2 = (√ 3) V2 I2 cosφ2 = S2 cosφ2,
Q2 = (√ 3) V2 I2 senφ2 = S2 senφ2,
dove V2 è la tensione applicata al carico, I2 è la corrente di linea di una fase e φ2 è
l’angolo di sfasamento del carico.
Le potenze assorbite dal primario del trasformatore sono espresse da:
S1 = (√ 3) V1 I1;
61
P1 = (√ 3) V1 I1 cosφ1 = S1 cosφ1,
Q1 = (√ 3) V1 I1 senφ1 = S1 senφ1,
dove la V1 è la tensione di alimentazione di una fase del primario, I1 è la corrente di
linea assorbita da una fase del trasformatore e φ1 è l’angolo di sfasamento sul lato
primario.
Relativamente alle sole potenze attive potremo scrivere che:
Potenza assorbita a primario =
= potenza assorbita dal carico + potenza persa nel ferro + potenza persa nel rame =
P1 = P2 + Pfe + Pcu.
Le perdite nel ferro, come nel caso del trasformatore monofase, si possono ritenere
uguali alla potenza assorbita dal trasformatore stesso, durante il funzionamento a
vuoto, con tensione pari a quella nominale, ossia:
P0 = circa = Pfe = (√ 3) V1 I10 cosφ0, e si può anche osservare che,
P0 = 3 G0 ( E1 / √ 3 )² = G0 E1² = G0 V1², essendo trascurabili le perdite
nei parametri trasversali durante il funzionamento a vuoto.
Le perdite nel rame con correnti pari a quelle nominali si possono ritenere uguali alla
potenza di corto circuito nominale:
Pcu = circa = Pccn = (√ 3) V1cc I1n cosφcc, nell’ipotesi di chiudere il secondario in
corto circuito, ( come nel caso del trasformatore monofase ).
Tenendo conto che in questo caso stiamo facendo riferimento ad un trasformatore
trifase, si può ammettere che la potenza di corto circuito nominale corrisponda al
triplo della perdita di una singola fase, in altri termini sarà:
Pccn = 3 R1cc I1n²
oppure,
Pccn = 3 R2cc I2n².
Inoltre, le tensioni di corto circuito E1cc e E2cc, essendo tensioni concatenate,
saranno esprimibili come:
E1cc = (√ 3) Z1cc I1n e
E2cc = (√ 3) Z2cc I2n.
Infine, per il calcolo del rendimento η del trasformatore trifase, varranno le stesse
relazioni viste per il trasformatore trifase:
η = P2 / ( P2 + P0 + ² Pccn ) =
= ( √ 3 V2 I2 cosφ2 ) / ( √ 3 V2 I2 cosφ2 + P0 + ² Pccn ).
ESERCIZIO
Si calcoli il rendimento e la potenza assorbita dal primario di
un trasformatore trifase, sapendo che:
V2 = 400 V
P0 = 200 W
= 0,85
I2n = 72 A
cos φ2 = 0,8
Pccn = 1100 W
Applicando le relazioni appena indicate si ottiene:
Q2 = √ 3 V2 I2 senφ2 =
Sapendo che, = I2 / I2n si P2 = √ 3 V2 I2 cosφ2 =
= √ 3 . 400 . 61,2 . 0,8 =
= √ 3 . 400 . 61,2 . 0,6 =
ottiene I2 = I2n =
= 33920,5 W
= 25440,4 VAR
= 0,85 ( 72 ) = 61,2 A
62
Pcu = ² Pccn =
= (0,85)² . 1100 = 794,75 W
S2 = √ ( P2² + Q2² ) =
= 42400,64 VA
In definitiva η vale:
η = 33920,5 / ( 33920,5 +
200 + 794,75 ) = 0,9715
Visto che η = P2 / P1 si Ma è anche vero che:
ottiene anche P1 = P2 / η = P1 = P2 + P0 + ² Pccn =
P1 = 33920,5 / 0,9715 =
= 33920,5 + 200 + 794,75 =
= circa = 34915 W
= circa = 34915 W
VARIAZIONE DI TENSIONE DA VUOTO A CARICO
Nel caso dei trasformatori trifasi, la caduta di tensione industriale riferita ai valori
concatenati, si esprime calcola utilizzando la seguente relazione:
E = √ 3 V = √ 3 I2 ( R2cc cosφ2 + X2cc senφ2 ).
ESERCIZIO
Determinare la caduta di tensione, ( c.d.t ), per un trasformatore
Avente Sn = 160 kVA, K0 = Kt = 15/ 0,4, ( entrambe le tensioni
sono espresse in kV ), Vcc% = 4, Pccn = 2350 W, funzionante a
pieno carico con cosφ = 0,9.
Per risolvere l’esercizio risulta necessario ricavare i seguenti valori:
I2n poiché il trasformatore lavora a pieno carico, quindi con corrente erogata al
carico uguale alla corrente secondaria nominale, la resistenza R2cc e la X2cc. In
questo caso la c.d.t si calcola con la relazione:
E = √ 3 V = √ 3 I2n ( R2cc cosφ2 + X2cc senφ2 ).
I2n = Sn / (√ 3 V20n ) =
= 160000 / (√ 3 . 400 ) =
= 230,94 A
V2cc = Vcc% . V20n / 100 =
= 4 . 400 / 100 = 16 V
Z2cc = V2cc / (√ 3 . I2n ) =
= 16 / (√ 3 . 230,94 ) =
= 0, 04
R2cc = Pccn / (I2n)² =
= 2350 / 3 . (230,94)² =
= circa = 0,0147
X2cc = √Z2cc² - R2cc² =
= √ 0.04² - 0,0147² =
= 0,0372
φ =cos-1 ( 0,9 ) = 25,84 °
senφ = sen25,84 = 0,436
In definitiva si ottiene che:
c.d.t = V = (√ 3) . ( 230,94 ) ( 0,0147 . 0,9 + 0,0372 . 0,436 ) = circa = 11,78 V,
da cui si ricava che, V% = 100 . V / V20n = 100 . 11,78 / 400 = 2,945 %.
DATI DI TARGA DEL TRASFORMATORE TRIFASE
Nel caso del trasformatore trifase i dati di targa visti per il trasformatore monofase
valgono anche in questo caso, con le seguenti variazioni:
potenza apparente nominale Sn = √ 3 V20n I2n;
63
correnti nominali I1n = Sn / √ 3 V1n ;
I2n = Sn / √ 3 V20n
Si ricorda che per la potenza e la tensione di corto circuito valgono le relazioni già
introdotte, Pccn = 3 R1cc I1n² oppure, Pccn = 3 R2cc I2n², mentre per le tensioni di
corto circuito le relazioni introdotte sono,
V1cc = (√ 3) Z1cc I1n e V2cc = (√ 3) Z2cc I2n.
Per quanto riguarda la potenza a vuoto0 vale la formula seguente:
P0 = circa = Pfe = (√ 3) V1 I10 cosφ0.
Un dato di targa tipico del trasformatore trifase è l’indicazione del tipo e del gruppo
di collegamento.
Il collegamento con cui si realizzano i due avvolgimenti vengono indicati con una
coppia di lettere: la lettera maiuscola riguarda la tipologia dell’avvolgimento
primario, mentre la lettera minuscola riguarda la tipologia dell’avvolgimento
secondario. A questa coppia di lettere viene aggiunto un numero, che indica il
gruppo di appartenenza o il gruppo di collegamento del trasformatore.
Il gruppo di collegamento di un trasformatore trifase viene così definito:
il numero che moltiplicato per 30°, fornisce l’angolo di sfasamento in ritardo
della tensione di fase del lato BT, rispetto alla corrispondente tensione di fase del
lato AT.
Secondo le norme CEI i gruppi di collegamento dei trasformatori sono 4,
il gruppo 0 a cui corrisponde lo sfasamento nullo;
il gruppo 5 a cui corrisponde lo sfasamento di 150°;
il gruppo 6 a cui corrisponde lo sfasamento di 180°;
il gruppo 11 a cui corrisponde lo sfasamento di 330°.
Dallo schema sotto riportato si può notare che il gruppo corrisponde alla lettura
dell’ora di un orologio analogico, ossia:
Gruppo 0
Gruppo 5
Gruppo 6
64
Gruppo 11
Il gruppo di collegamento dei trasformatori trifasi è importante per il loro
funzionamento in parallelo, ossia il parallelo fra due trasformatori trifasi si può
eseguire a patto che i due trasformatori appartengano allo stesso gruppo, per evitare
di collegare fra loro punti a tensione distinta.
AUTOTRASFORMATORE TRIFASE
L’autotrasformatore trifase funziona sullo stesso principio dell’autotrasformatore
monofase, visto precedentemente. L’impiego dell’autotrasformatore trifase è nel
campo delle elevate potenze, con un ordine di grandezza pari alle centinaia di
megavoltampere.
Anche in questo caso, è possibile sfruttare la riduzione della potenza di
dimensionamento rispetto a quella passante.
Il collegamento normalmente utilizzato è quello a stella, poiché consente la
connessione a terra del centro stella, per ragioni di sicurezza.
Lo schema di principio è qui di seguito rappresentato:
V1
A
B
C
V1f
V2f
O
65
V2
a
b
c
n
LE MACCHINE ASINCRONE
In questo caso si parla di macchine rotanti; infatti la parte rotorica ruota attorno al suo
asse centrale. In poche parole, le macchine rotanti sono costituite da una parte fissa
detta statore e da una parte rotante detta rotore o indotto.
Proprio per questa ragione, iniziamo con introdurre alcune nozioni fondamentali del
moto rotatorio. Per comodità ipotizziamo che il corpo, che esegue un moto rotatorio,
attorno al suo asse, sia un cilindro.
In questo caso tutti i punti del corpo rigido, durante la rotazione, compiono una
circonferenza di raggio r, con raggio massimo per i punti appartenenti alla superficie
esterna ed il raggio decresce con l’avvicinarsi dei punti all’asse di rotazione. I punti
appartenenti all’asse di rotazione, non eseguono alcun movimento.
F
F
b B con b = braccio di leva
Asse di rotazione
Se durante l’intervallo di tempo t, un qualsiasi punto, non appartenente all’asse di
rotazione, si sposta di un angolo , si può introdurre il concetto di velocità angolare,
dove per velocità angolare , si intende il rapporto seguente:
66
= / t, dove nel S. I si misura in rad / s.
In altri termini la velocità angolare ha le dimensioni di una frequenza.
Inoltre, se la velocità angolare varia nel tempo, ossia la quantità
= / t = ² () / t² si dice accelerazione angolare.
L’accelerazione angolare si misura in rad /s².
La velocità angolare è legata alla velocità lineare periferica dalla relazione
seguente: v = r, dove da quest’ultima relazione si deduce che i punti appartenenti
alla periferia dell’asse di rotazione viaggiano con una velocità lineare più elevata,
poiché devono percorrere circonferenze più lunghe.
Si ricordi che dal moto circolare uniforme, si può dedurre che:
v = velocità = spazio / tempo = ( se il raggio della circonferenza vale r ) =
= perimetro della circonferenza / periodo del moto circolare =
= 2 r / T, ma 1 / T = f = frequenza, da cui si deduce,
v = 2 r / T = 2 r f.
Dalla relazione precedentemente ricavata, si capisce che risulta, v = 2 r f = r,
ossia risulta = 2 f.
Spesso nelle macchine rotanti elettriche, la velocità angolare, viene espressa in
numero di giri al minuto, ed indicata con il simbolo n. Tenendo presente che 1 giro
corrisponde ad un angolo giro = 360°, ossia in radianti corrisponde all’angolo 2, e
ricordando che ad ogni minuto corrispondono 60 s si ha:
= 2 n / 60, ciò implica che,
n = 60 / 2 = circa = 9,55 .
Il moto rotatorio di un corpo si ottiene applicando una coppia. La coppia è l’insieme
di due forze, uguali ed opposte, ( la cui risultante è nulla ), poste ad una distanza b dal
corpo. In questo caso il prodotto F b produce, il cosiddetto momento di rotazione,
ossia il momento prodotto dalla coppia di forze è in grado di porre in rotazione il
corpo attorno ad un asse di rotazione. Ovviamente, la coppia motrice deve essere
maggiore della coppia resistente, ossia della coppia di forze che si oppone al moto di
rotazione del corpo, ( è sufficiente l’attrito dell’aria circostante il corpo ).
In conclusione, un corpo in rotazione con velocità angolare , è sempre soggetto ad
una coppia motrice Cm ed a una coppia resistente Cr:
Cm
Cr
Per il moto rotatorio, esiste un’ equazione, di equilibrio dinamico, detta equazione
di D’Alambert, che mette in relazione la coppia motrice con la coppia resistente
attraverso la relazione qui riportata:
Cm = Cr + J , ossia,
67
Coppia motrice = Coppia resistente + momento di Inerzia . (acceler . angolare).
La grandezza J, cioè, il momento di Inerzia rispetto all’asse di rotazione, dipende
dalla caratteristiche geometriche e fisiche del corpo posto in rotazione.
La quantità J , costituisce la cosiddetta coppia d’inerzia del corpo, ed essa può
essere così interpretata: la coppia motrice da applicare ad un corpo per poterlo
fare ruotare con accelerazione angolare , deve essere uguale alla somma tra la
coppia resistente, che si oppone al moto, e la coppia d’inerzia.
Si osserva infine che: = ( Cm – Cr ) / J, che si traduce ammettendo che
l’accelerazione angolare risulta inversamente proporzionale al momento di inerzia J
del corpo; ( è una funzione analoga a quella della massa m sull’accelerazione dei
moti rettilinei ).
Molto importante è il segno della , perché si ha:
> 0, in altri termini il corpo accelera, la velocità angolare aumenta, pertanto
Cm > Cr e la differenza Cm – Cr rappresenta la coppia accelerante;
< 0, in altri termini il corpo decelera, la velocità angolare diminuisce e
quindi, Cm < Cr e la differenza Cr – Cm rappresenta la coppia decelerante;
se = 0, il corpo ruota con velocità angolare costante, quindi il corpo non
subisce accelerazioni. In questo caso si ha equilibrio, cioè Cm = Cr.
Si aggiunge infine che il momento di inerzia J, dipende dalla massa e dalle
dimensioni del corpo in rotazione, ad esempio per un cilindro retto di raggio r e di
massa M, uniformemente distribuita, risulta che:
J = ( 1 / 2 ) M r².
Da quest’ultima relazione si capisce che, a parità di massa, il momento di inerzia
risulta particolarmente elevato per corpi aventi raggio molto elevato o per punti
aventi massa molto lontana dall’asse di rotazione. Per le parti rotanti o per i rotori
delle macchine elettriche, viene utilizzata una grandezza equivalente al momento di
inerzia. Questa grandezza viene indicata col termine di GD², dove D indica il
diametro di inerzia che corrisponde al doppio del raggio di inerzia R . Il raggio di
inerzia R viene definito come la distanza teorica che dovrebbe avere la massa M,
supposta concentrata in un punto, rispetto all’asse di rotazione, per avere lo stesso
momento di inerzia J:
R
M
La distanza R è data da: R = √ ( J / M ).
68
In definitiva, la grandezza GD² prende il nome di momento dinamico, la quale si
misura in Nm², la quale risulta calcolata in funzione del peso della parte rotante G e
del già citato diametro di inerzia D.
Dimostriamo ora il legame fra il momento dinamico ed il momento di inerzia J:
GD² = G ( 2R )² = 4 GR², ma R = √ ( J / M ) e G = M g =
= GD² = 4 G J / M = 4 Mg J / M = 4 g J.
In definitiva risulta che:
GD² = 4 g J.
Esercizio
Si calcoli il momento di inerzia e quello dinamico di un rotore, di un
motore elettrico, avente una massa M = 100 Kg e un raggio r = 12 cm =
= 0,12 m.
Considerando la relazione J = ( 1 / 2 ) M r², possiamo ricavare il corrispondente
momento di inerzia della macchina: J = 0,5 . 100 . ( 0,12)2 = 0,72 Kg m².
Il diametro di inerzia D corrisponde 2R, con R = √ ( J / M ) = √ ( 0,72 / 100 ) =
circa = 0,0848 m, da cui il diametro di inerzia D = 2R = circa = 0,17 m.
Conseguentemente si ricava che, essendo G = M g = 100 . ( 9,81 ) = 981 N,
GD² = 981 . ( 0,17 )² = 28,35 Nm².
Procediamo questa introduzione alle macchine rotanti, tenendo conto che, le
macchine stesse sono accoppiate a dei carichi meccanici. Il movimento del sistema si
svolgerà in relazione agli andamenti della coppia motrice e della coppia resistente, in
diretta connessione con la velocità e agli attriti che si oppongono al moto stesso.
Il grafico cartesiano che descrive l’andamento della coppia al variare della
velocità è detto caratteristica meccanica.
Nel caso dei motori elettrici le caratteristiche meccaniche assumono varie forme.
Esempio di accoppiamento motore elettrico – carico meccanico, mediante
l’utilizzo di un giunto:
Le caratteristiche meccaniche dei carichi, dipendenti dal carico stesso, possono essere
ricondotte a tre forme particolari:
a)
coppia resistente costante con la velocità:
Cr
è una caratteristica tipica degli apparecchi
di sollevamento, ( gru, montacarichi ),
in cui il peso da sollevare è costante.
69
b)
Cr
coppia resistente proporzionale alla velocità:
si ha quando il carico è costituito da un
generatore elettrico chiuso su di una
resistenza costante, ( dinamo freno ). Anche
la coppia resistente sviluppata, dall’attrito
viscoso ha un andamento di questo tipo.
c)
coppia resistente proporzionale al quadrato della velocità: Cr
si ha per le macchine operatrici che operano con i fluidi,
( ventilatori, pompe centrifughe, ecc. ); nel caso di
veicoli in movimento soggetti a resistenza aerodinamica,
( per esempio i treni ), è comunque un caso frequente.
Nel grafico, sotto riportato, rappresentiamo le caratteristiche meccaniche di un
motore con coppia meccanica Cm = Ca – K1 , decrescente con la velocità.
Il grafico della Cm, come si osserva, parte dal valore Ca, per = 0, e
per 1 = Ca / K1 risulta Cm = 0, inoltre il carico ha una coppia resistente
Cr = K2 + K3 ², ossia una coppia resistente data dalla somma di un termine
costante e di uno crescente con il quadrato della velocità angolare .
C
Cr
Ca
P
In P si ha equilibrio meccanico
Cm > Cr
Cm < Cr stabile.
P
1
Osservando il grafico si possono effettuare le seguenti osservazioni:
all’avviamento, ossia per = 0, si ha la massima accelerazione, essendo
massima la differenza Cm – Cr, inoltre la velocità del sistema aumenta con il
diminuire dell’accelerazione, dato che diminuisce la coppia accelerante;
nel punto P, alla velocità P, si ha l’equilibrio delle coppie, ossia Cm = Cr, e
la velocità del motore resta costante. In questo caso si ottiene la seguente
relazione, Ca – K1 P = K2 + K3 P², da cui si può ricavare la velocità.
Inoltre, nel punto P il sistema è in equilibrio stabile, infatti se si verifica un
piccolo spostamento rispetto a P, il sistema reagisce ripristinando l’equilibrio.
Nell’intorno del punto P si rileva che o Cm > Cr a sinistra di P, oppure,
Cm < Cr a destra di P, ed in queste situazioni l’equilibrio è instabile.
70
RELAZIONE TRA COPPIA E POTENZA
L’applicazione di una coppia C ad un corpo rotante con velocità angolare costante ,
produce un lavoro meccanico che, nel tempo t, durante il quale si ha uno
spostamento angolare , è pari a L = C . Pertanto si sviluppa una potenza data
da: P = L / t = C / t = C , essendo il rapporto / t la velocità angolare. In
definitiva la relazione che lega la potenza alla velocità angolare è:
P = C .
Esprimendo ora in funzione dei numeri di giri della macchina o della parte rotante,
si ha che:
P = 2 n C / 60, da cui si ricava,
C = ( 60 / 2 ) ( P / n ) = 9,55 ( P / n ).
Le relazioni precedenti mettono in luce che, a parità di coppia la potenza aumenta con
la velocità angolare, mentre a parità di potenza la coppia diminuisce all’aumentare
della velocità angolare.
ASPETTI COSTRUTTIVI DELLA MACCHINA ASINCRONA
La struttura di una macchina asincrona dipende da numerosi fattori. I principali
fattori che possono influenzare le caratteristiche della macchina asincrona sono:
la potenza, ( e questa influenza anche le dimensioni della macchina stessa ), la
tensione di funzionamento, il sistema di raffreddamento, il collegamento meccanico
con il carico, ( ad esempio con asse orizzontale, verticale, con un giunto, con un
riduttore, ecc. ), il grado di protezione nei riguardi degli agenti esterni sia solidi che
liquidi. Le parti costituenti di una macchina asincrona possono essere così
schematizzate:
cassa statorica, avente la funzione di contenere le parti interne della macchina,
proteggerla dagli agenti esterni, permetterne il fissaggio, ecc.;
morsettiera, per il collegamento al circuito esterno e a cui fanno capo le tre fasi
dell’avvolgimento statorico;
targhetta d’identificazione, sulla quale vengono riportati i dati forniti dal
costruttore;
circuito magnetico statorico, in cui si sviluppa il campo magnetico dello statore,
ossia della parte fissa della macchina;
circuito magnetico rotorico, che costituisce la parte mobile della macchina. La parte
rotorica è accoppiata con l’albero della macchina. Inoltre, tale parte è separata dallo
statore mediante uno strato d’aria, detto traferro. In tale parte si sviluppa il campo
magnetico di indotto;
avvolgimento rotorico, è l’avvolgimento realizzato all’interno della parte rotante,
detto anche avvolgimento di indotto, in cui si sviluppa la coppia motrice della
macchina;
albero meccanico, per il collegamento col carico;
ventola di raffreddamento, avente la funzione di autoventilare la macchina.
MACCHINA ASINCRONA TRIFASE
71
La macchina asincrona trifase viene prevalentemente impiegata come motore, ma può
funzionare anche come generatore.
IL CAMPO MAGNETICO TRIFASE
Il funzionamento del motore asincrono si fonda sul campo magnetico rotante,
scoperto da Galileo Ferraris.
Per ottenere un campo magnetico trifase rotante devono essere soddisfatte due
condizioni:
devono esservi tre avvolgimenti fissi nello spazio, uguali fra loro, con lo stesso
numero di avvolgimenti e disposti secondo tre assi sfasati di 120°;
nei tre avvolgimenti, così disposti, circolino tre correnti magnetizzanti alternate
sinusoidali, aventi la stessa frequenza, lo stesso valore efficace e sfasate fra loro
di 120° nel tempo. Costituiscono così una terna simmetrica ed equilibrata.
Consideriamo, i tre avvolgimenti, ( costituiti ciascuno da N spire di rame ), su
indicati, disposti su tre assi sfasati reciprocamente di 120°. Siano tali avvolgimenti
interessati ad una terna simmetrica ed equilibrata di correnti, ( = tutte tre le correnti
sono sinusoidali, isofrequenziali e sfasate di 120° ).
Tale situazione può essere così schematizzata:
r1
I1
1
Schema della distribuzione spaziale di 3
bobine a 120°. Le 3 bobine sono
percorse da una terna equilibrata di
correnti
Im
N
I3
O
+ 2/3
I1
N
N
I3
I2
- 2/3
Re
I2
3
2
r3
r2
Se la corrente I1 è presa come riferimento si deduce che le tre correnti sinusoidali
sono, rispettivamente:
i1 = IM sen ( t )
i2 = IM sen ( t – 2/3 )
i3 = IM sen ( t + 2/3 ).
72
Ogni bobina crea una forza magnetomotrice, espressa come F.m.m = Ni e perciò si
avranno tre forze magnetomotrice sinusoidali, con lo stesso valore massimo
FmM = NIM, in fase con le rispettive correnti e sfasate fra loro di 120° nel tempo:
Fm1 = Ni1 = N IM sen ( t ) = FmM sen ( t );
Fm2 = Ni2 = N IM sen ( t – 2/3 ) = FmM sen ( t – 2/3 );
Fm3 = Ni3 = N IM sen ( t + 2/3 ) = FmM sen ( t + 2/3 ).
Ogni forza magnetomotrice agirà nello spazio, secondo la direzione della bobina,
( vedi assi r1, r2 ed r3 ), che la produce e con il verso dipendente dal segno della
f.m.m nell’istante considerato. Il campo magnetico che si sviluppa dipende dalla
f.m.m TOTALE, che si ha istante dopo istante. Facciamo alcuni esempi, in istanti
opportuni e verifichiamo il valore della f.m.m totale. Assumiamo per esempio
l’istante t1 = 0, di conseguenza t1 = 0 e le tre f.m.m sono uguali rispettivamente a:
Fm1 = 0;
Fm2 = FmM sen ( - 2/3 ) = - ( √3 / 2) FmM;
Fm3 = FmM sen ( 2/3 ) = ( √3 / 2) FmM .
In questo modo la risultante vettoriale FmT si può dedurre dalla seguente
composizione:
r1
Fm2 = - ( √3 / 2) FmM
FmT
r3
Fm3 = ( √3 / 2) FmM
r2
In definitiva, FmT è la somma vettoriale dei due vettori Fm2 ed Fm3, il cui modulo
vale:
FmT = 2 (( √3 / 2) FmM ) cos30° = 2 (( √3 / 2) FmM ) (√3 / 2) = 3/2 FmM.
Consideriamo l’istante di tempo t2 tale che t2 = / 6, ( ovviamente deve risultare
t2 = / 6 ), in questa situazione ne risulta che:
Fm1 = FmM sen ( /6 ) = FmM / 2;
Fm2 = FmM sen ( /6 – 2/3 ) = FmM sen ( - / 2 ) = - FmM ;
Fm3 = FmM sen (/6 + 2/3 ) = FmM sen (5/6 ) = FmM / 2 .
FmT
r1
S
Fm2
H
Fm1
73
O
Fm3
r3
r2
Si può verificare che la somma dei due vettori Fm1 ed Fm3, dà luogo ad un vettore
risultante con modulo FmS = Fm1 = Fm3 = FmM / 2, ( basta osservare che il triangolo
HOS è equilatero ) e perciò la somma dei tre vettori costituisce una forza
magnetomotrice totale FmT il cui modulo vale
FmT = Fm2 + FmS = FmM + FmM / 2 = 3/2 FmM.
Se il tempo assume il valore, t3 = / 3, in altri termini è il caso in cui, t3 = / 3,
si desume che:
Fm1 = FmM sen ( /3 ) = ( √3 / 2 ) FmM;
Fm2 = FmM sen ( /3 – 2/3 ) = FmM sen ( - / 3 ) = - ( √3 / 2) FmM ;
Fm3 = FmM sen (/3 + 2/3 ) = FmM sen ( ) = 0 .
FmT
r1
Fm2 = - ( √3 / 2) FmM
Fm1 = ( √3 / 2 ) FmM
angolo di 120°
r3
r2
In questo caso, si osserva che la somma dei due vettori Fm1 ed Fm2 è un vettore a
120° rispetto all’asse della x o a 150° rispetto all’asse della bobina 2 o asse r2. Il
valore del modulo della FmT è dato come: 2 ( √3 / 2 ) FmM cos (/3) = 3/2 FmM.
Infine, se si considera l’intervallo di tempo in cui t4 = / 2, ossia è t4 = / 2, si
desume che:
Fm1 = FmM sen ( /2 ) = FmM;
Fm2 = FmM sen ( /2 – 2/3 ) = FmM sen ( - / 6 ) = - FmM / 2 ;
Fm3 = FmM sen (/2 + 2/3 ) = FmM sen ( 7 / 6 ) = FmM sen ( - / 6 ) = - FmM / 2 .
r1
FmT
Fm1 = FmM
Fm2 = -FmM / 2
Fm3 = - FmM / 2
r3
r2
74
In questo caso il vettore risultante è tutto appartenente all’asse della prima bobina o
asse r1. Il valore del suo modulo vale:
Fm2 + Fm3 = FmM / 2 con direzione asse r1, da cui il vettore risultante sarà con
modulo Fm1+ Fm2 + Fm3 = FmM + FmM / 2 = ( 3 / 2 ) FmM .
Si deve tenere presente che, abbiamo effettuato il ragionamento, solo per alcuni
istanti, ma esso si dovrebbe ripetere ad ogni istante. Si giunge comunque alla
seguente conclusione:
la f.m.m risultante delle tre bobine ha, ad ogni istante, sempre lo stesso valore,
ossia uguale a 1,5 volte quello massimo della f.m.m di fase, e ruota nello spazio
con velocità angolare costante, pari alla pulsazione delle correnti magnetizzanti.
Osservando che all’istante in cui corrisponde un angolo di 90° della sinusoide si ha
uno spostamento angolare di 90°, allora si comprende che la pulsazione è uguale alla
velocità angolare. Infine, si deve ricordare che la f.m.m produce un flusso magnetico
legato alla legge di Hopkinson, f.m.m = e il flusso è legato a sua volta
all’induzione dalla relazione, B = / S. In conclusione la f.m.m produce un campo
magnetico rotante, le cui polarità N – S si muovono continuamente nello spazio,
come si trattasse di un magnete posto in movimento da un qualche sistema
meccanico. In base a quanto detto ne segue il seguente teorema di Galileo Ferraris:
dalla composizione di n campi magnetici alternati prodotti da un sistema
polifase equilibrato di n correnti sinusoidali circolanti in n bobine disposte a
( 360° / n ), nasce un campo magnetico di ampiezza costante pari a n / 2
l’ampiezza di ogni campo componente, rotante nello spazio con velocità pari alla
pulsazione della corrente magnetizzante.
CAMPO MAGNETICO ROTANTE NELLA MACCHINA ASINCRONA
TRIFASE
In questo tipo di macchina il campo magnetico rotante è creato dall’avvolgimento
statorico, che risulta collegato con la rete elettrica di alimentazione.
In questo caso le bobine dell’avvolgimento induttore sono disposte all’interno di cave
prodotto sulla superficie circolare dello statore, con una distribuzione discontinua
della f.m.m. Inoltre, a seconda della disposizione degli avvolgimenti il campo può
avere più di due poli. In genere si indica con 2p il numero di poli e con p il numero
delle coppie polari.
Molto importante:
per lo studio dei fenomeni elettromagnetici che interessano i
conduttori statorici e rotorici, si farà riferimento ad un’induzione
magnetica con distribuzione sinusoidale lungo il traferro e
rotante lungo le circonferenze statorica e rotorica, ossia con
posizione continuamente variabile nel tempo.
VELOCITA’ DEL CAMPO MAGNETICO ROTANTE
75
Da quanto visto in precedenza, in una macchina a due poli, ossia ad una coppia
polare, vi è corrispondenza fra l’angolo t della sinusoide e lo spostamento angolare
del campo magnetico, in altri termini ad ogni periodo T il campo magnetico
percorrerà un giro, pari a 2 radianti, con una velocità angolare, 0 = 2 / T = 2f,
che corrisponde anche alla pulsazione della sinusoide.
La velocità angolare del campo magnetico rotante, dipende dal numero delle coppie
polari, pertanto essa è espressa in radianti al secondo la seguente relazione:
0 = 2 / p T = 2f / p.
Spesso la velocità viene espressa in giri / minuto secondo la seguente relazione:
n0 = 60 f / p.
Le due espressioni precedenti, legate alla velocità del campo magnetico rotante,
esprimono in realtà la cosiddetta velocità di sincronismo. Questo termine deriva
dalla macchina sincrona nella quale la parte rotante della macchina, ( il rotore ),
viaggia alla stessa velocità del campo magnetico rotante.
Infine dalla relazione n0 = 60 f / p si capisce che la velocità delle machine
diminuisce all’aumentare del numero delle coppie polari.
TENSIONI INDOTTE NELL’AVVOLGIMENTO STATORICO
Le varie spire costituenti l’avvolgimento statorico risultano, per quanto visto in
precedenza, investite da un campo magnetico variabile nel tempo, con legge
sinusoidale. Pertanto possiamo dire che:
in ogni conduttore statorico viene indotta una tensione sinusoidale la cui fase
dipende dalla posizione del conduttore rispetto alla distribuzione del campo
magnetico.
Si osserva che:
le tensioni indotte nei conduttori, disposte in cave adiacenti risultano sfasate di
un angolo ec = angolo elettrico di cava;
i conduttori, intervallati di un passo polare, avranno tensioni in opposizione di
fase;
lo sfasamento di 360° elettrici corrisponde a due passi polari;
l’angolo meccanico di cava mc , rappresenta in pratica lo spostamento
angolare tra gli assi di due cave adiacenti. Tale angolo meccanico si ottiene
dalla relazione: mc = 360° / Nc = 360° / Numero di cave statoriche.
Si ricorda, infine, che esiste anche il seguente legame: ec = p mc .
Si può ammettere che il valore efficace della tensione indotta in un singolo
conduttore sia uguale a:
Ec = 2 Kf f .
La tensione totale di una fase è minore di quella che si otterrebbe con la semplice
somma algebrica delle tensioni, a causa degli sfasamenti. Pertanto, per tenere conto di
ciò, si deve esprimere la E1, cioè tensione di fase totale dello statore, come:
E1 = KB N1 Ec,
76
dove KB è il fattore di Blondel ed N1 il numero di spire totali dell’avvolgimento
statorico. Conseguentemente ne risulterà:
E1 = KB N1 Ec = KB N1 2 Kf f . = K1 N1 f ,
avendo posto K1 = 2 KB Kf . Spesse volte si assume Kf = 1,11.
Per il calcolo del coefficiente di Blondel si utilizza in genere la seguente relazione:
KB = sen ( q ec / 2 ) / q sen ( ec / 2 ), con q numero di ( cave / polo . fase ).
ESEMPIO L’avvolgimento statorico di un motore asincrono trifase ha i seguenti
dati:
Nc = numero delle cave = 36
Frequenza F = 50 Hz
Numero poli = P = 2 p = 4
Esso è composto, inoltre, da 6 matasse in serie per fase di 50 spire l’una.
Si calcoli il valore del flusso per polo per avere una f.e.m = 230 Volt.
Come primo dato è necessario ricavare il numero di cave per polo fase q, che si
ottiene dalla seguente relazione: q = num. di cave / num. di fasi . numero poli =
= q = Nc / 3 . 2p = 36 / 3 . 4 = 36 / 12 = 3 cave / polo . fase.
Inoltre, si ricava l’angolo meccanico di cava mc = 360° / Nc = 360° / 36 = 10°, ed
ovviamente l’angolo elettrico di cava ec = p mc = 20°.
Dai dati ottenuti è possibile risalire al coefficiente di Blondel, che per definizione è:
( bisogna tenere presente che E1 = KB N1 Ec = KB N1 2 Kf f . = K1 N1 f ),
KB = sen ( q ec / 2 ) / q sen ( ec / 2 ) =
= sen 30° / 3 sen 10° = 0,5 / 0,52 = circa = 0,96.
Il numero di spire per fase statorica è dato dalla relazione seguente:
N1 = num. di matasse per serie . num. di spire totali . num. di coppie polari =
= N1 = 6 . 50 . ( P / 2 ) = 300 . 2 = 600 conduttori complessivi.
Si deve tenere conto infine che: K1 = 2 Kf KB = 2 . 1,11 . 0,96 = 2,1312.
In conclusione ricordando che:
E1 = KB N1 Ec = KB N1 2 Kf f . = K1 N1 f , si deduce che,
= E1 / K1 N1 f = 230 / ( 2,1312 . 600 . 50 ) = circa = 3,6 mWb
SCORRIMENTO
La caratteristica fondamentale della macchina asincrona è quella far ruotare la sua
parte mobile ad una velocità n inferiore a quella di sincronismo n0 . Pertanto, si
definisce scorrimento s di una macchina asincrona, il seguente rapporto:
s = n0 – n / n0 = 1 – ( n / n0 ) = scorrimento.
Spesso, la differenza n0 – n si dice velocità di scorrimento e si indica con ns.
Lo scorrimento percentuale viene definito come:
s% = 100 s = 100 ( n0 – n / n0 ) = 100 (1 – ( n / n0 ) ).
Il valore dello scorrimento s è compreso fra 0 ed 1. Nel caso in cui s = 0, risulta
77
n0 = n ed è il caso ideale in cui la macchina ha campo rotante avente la stessa
velocità del rotore, ossia è il caso del sincronismo.
Mentre se s = 1 è il caso in cui è il rotore fermo o bloccato, ossia risulta n = 0.
In definitiva, è la situazione nella fase di avviamento della macchina in cui la parte
rotante è ancora ferma. E’ il cosiddetto caso a rotore bloccato.
Sapendo che: s = n0 – n / n0 di conseguenza sarà, n0 s = n0 – n da cui posso anche
scrivere,
n = n0 – n0 s = n0 ( 1 – s ) oppure, n = ( 100 n0 ( 1 – s ) ) / 100 =
= n = n0 ( 100 – 100s ) / 100 = n0 ( 100 – s% ) 100.
ESERCIZIO
Calcolare lo scorrimento di un motore a 6 poli, alimentato ad
una frequenza di 50 Hz, quando funziona ad una velocità n = 960 giri / min.
Noi sappiamo che, n0 = 60 f / p = 60 . 50 / 3 = 1000 giri / min.
Di conseguenza possiamo dedurre il valore dello scorrimento s; infatti noi sappiamo
che, s = n0 – n / n0 = ( 1000 – 960 / 1000 ) = 40 / 1000 = 0,04 e perciò lo
scorrimento percentuale vale, s% = 100 s = 100 ( 0,04 ) = 4 %.
Sempre in riferimento all’esercizio precedente, quale sarà la velocità di rotazione
della macchina asincrona, nell’ipotesi che lo scorrimento sia pari al 3,2% ?
In questo caso applichiamo la relazione nella quale si ha:
n = n0 ( 100 – 100s ) / 100 = n0 ( 100 – s% ) 100 = 1000 ( 100 – 3,2 ) 100 =
= 10 ( 96,8 ) = 968 giri / min.
FREQUENZA ROTORICA
La frequenza delle grandezze elettriche, ( tensione, corrente ), della parte
rotorica di una macchina asincrona, dipende essenzialmente dalla velocità di
scorrimento,
ns = n0 – n, che è la velocità con la quale il rotore vede muoversi il campo magnetico
rotante. Ne consegue che, fr = frequenza rotorica = ns p / 60 = ( n0 – n ) p / 60, ma
risulta anche che, n = n0 ( 1 – s ) = n0 – n0 s , e sostituendo quest’ultimo valore nella
relazione, fr = ns p / 60 = ( n0 – n ) p / 60, si ottiene:
fr = ns p / 60 = (( n0 – n0 + n0 s )p) / 60 = ( n0 s ) p / 60, ma n0 = 60 f / p,
che inserito nella relazione precedente fornisce la relazione finale,
fr = ( n0 s ) p / 60 = ( 60 f / p ) s ( p / 60 ) = f s.
La relazione finale ci dice che la frequenza rotorica si ottiene moltiplicando la
frequenza f per lo scorrimento s:
fr = f s.
La frequenza rotorica è massima nell’ipotesi che lo scorrimento valga 1, ossia per
s = 1, che è la situazione a rotore bloccato. Nelle condizioni di sincronismo, ossia per
s = 0, è ovvio che la frequenza rotorica valga zero. Nel funzionamento normale la
frequenza rotorica vale qualche Hertz.
TENSIONI INDOTTE ROTORICHE
78
La tensione indotta in ogni fase rotorica dipende dalla frequenza rotorica fr e
perciò potremo scrivere:
E2 = K2 N2 fr = K2 N2 s f , ma spesso
si indica E20 = K2 N2 f e perciò la relazione superiore diventa,
E2 = s ( E20 ).
OSSERVAZIONI
La tensione indotta nel rotore risulterà massima nel caso in
cui s = 1, ossia a rotore bloccato, mentre è nulla nell’ipotesi
di s = 0, ossia al sincronismo.
Se viene fornito il valore percentuale di s, ossia s %, bisogna
ricordare che: s% = 100 s e da ciò s = s % / 100
ESERCIZIO
Sia considerato un motore a 6 poli, con f = 50 Hz e sia
n = 960 giri / min, con s% = 4 %. Si calcoli per esso la frequenza
rotorica e la tensione E2, nell’ipotesi che a rotore bloccato
E20 = 100 Volt.
Dai dati del problema se ne deduce che: fr = s f = ( s % / 100 ) f = 0,04 . 50 = 2 Hz.
Inoltre Noi sappiamo che:
E2 = s E20 = ( s % / 100 ) . 100 = 0,04 . 100 = 4 Volt.
CIRCUITO EQUIVALENTE DEL MOTORE ASINCRONO TRIFASE
Rispetto al trasformatore, per tracciare il corrispondente circuito equivalente
del motore asincrono trifase, è necessario tenere conto delle seguenti differenze:
la frequenza rotorica è diversa da quella statorica;
la macchina asincrona è una macchina rotante, caratterizzata dallo
scorrimento;
lo scorrimento incide sulla frequenza rotorica;
il motore non alimenta un carico elettrico, ( come il trasformatore ), in quanto
le fasi rotoriche sono chiuse in corto circuito;
alimentando il motore con una terna simmetrica di tensioni, esso stesso si
comporta come un carico equilibrato, ( proprio per questo è possibile studiare
la macchina attraverso un’unica fase.
Il circuito equivalente di una macchina asincrona trifase allora potrà essere così visto:
I1
j X2d
j X1d
R1
R2
Z1
Z2
Y0
E1
Dallo schema si deduce facilmente che:
79
E2
Z1 = R1 + jX1d = R1 + j L1d = R1 + j 2 f L1d;
Y0 = G0 + j B0;
Z2 = R2 + j r L2d = R2 + j 2 fr L2d = R2 + j 2 s f L2d = R2 + j s X2d.
RAPPRESENTAZIONE ELETTRICA DEL CARICO MECCANICO
Il modulo della corrente rotorica I2 si calcola mediante la seguente relazione:
I2 = E2 / √ ( R2² + ( s X2d )² ) = √ ( R2² + s² (X2d) ² = ( tenendo conto che
E2 = s E20 ) = E2 = s E20 / √ ( R2² + s² (X2d) ² = s E20 / √ s² (R2² / s² + (X2d) ² =
s E20 / ( s √ (R2² / s² + (X2d) ² ) , da cui in definitive risulta,
I2 = E20 / √ (R2 / s)² + (X2d) ².
La resistenza ( R2 / s ) si può anche scrivere nel modo seguente:
R2 / s = R2 / s + R2 – R2 = R2 + R2 ( 1 / s – 1 ) = R2 = R2 + R2 ( (1 – s) / s ).
In poche parole la resistenza ( R2 / s ) si può pensare come somma di due resistenze
in serie, la resistenza R2 e la resistenza R2 ( (1 – s) / s ) che può essere interpretata
come una resistenza fittizia che rappresenta il carico meccanico. Quanto qui indicato
vale solo nella rappresentazione dei circuiti equivalenti, in quanto questa resistenza,
nella realtà non esiste, ( ossia la resistenza elettrica del carico non esiste ):
I2
R2 / s
R2
j X2d
j X2d
I2
R2 ( 1 – s )
E20
E20
circuito a
s
circuito b
La rappresentazione elettrica del carico meccanico è giustificabile anche, in sede di
bilancio energetico delle potenze rotoriche. Infatti, la potenza attiva che trasmette lo
statore al rotore, la quale viene anche detta potenza trasmessa o potenza
elettromagnetica, si può rilevare dal circuito a di figura superiore, ( tenendo conto
che il circuito equivalente si riferisce ad una singola fase ). Comunque, dal circuito a
si rileva che l’unico elemento dissipativo è proprio R2 / s, non essendovi altri
elementi dissipativi, perciò è: potenza trasmessa da una fase = Ptf = ( R2 / s ) I2².
La stessa potenza vista dal circuito b è data da:
Ptf = R2 I2² + R2 ( (1 – s) / s ) I2²,dove le due potenze possono essere così
considerate,
R2 I2² la potenza persa nell’avvolgimento rotorico;
R2 ( (1 – s) / s ) I2² rappresenta, per ogni fase, la differenza fra la potenza
trasmessa e quella persa dal rotore. Proprio per questo, ( per ogni fase )
rappresenta la potenza meccanica totale, fornita all’albero motore, o Pmf.
La potenza meccanica totale si può pensare come somma della potenza meccanica
utile, fornita al carico, e la potenza meccanica dissipata per attrito e ventilazione.
80
Nelle considerazioni precedenti si sono ritenute trascurabili le perdite nel ferro
rotoriche, le quali dipendono dalla frequenza fr = s f, che risulta un valore molto
piccolo e quindi trascurabili. Ma quando ciò non è possibile nel computo delle Pmf
occorre considerare tali perdite. Vogliamo ora dimostrare il legame esistente fra la
potenza meccanica totale Pmf e la potenza trasmessa Ptf . Partiamo dalle relazioni che
ci sono note:
Ptf = R2 I2² + R2 ( (1 – s) / s ) I2², ed inoltre è, Pmf = R2 ( (1 – s) / s ) I2²,
consideriamo la prima relazione e raccogliamo il termine comune R2 I2², da cui si
deduce che, Ptf = R2 I2² ( 1 + ( (1 – s) / s ) ), considerando il denominatore comune
si giunge ad ammettere che, Ptf = R2 I2² ( s + 1 – s ) / s = R2 I2² / s, in definitiva
riesco a ricavare che, R2 I2² = s Ptf . Se riprendiamo la prima relazione si ha che:
Ptf = R2 I2² + R2 ( (1 – s) / s ) I2² = R2 I2² + Pmf = s Ptf + Pmf . Di conseguenza
deduco che, Ptf = s Ptf + Pmf , ma posso ricavare anche che,
Pmf = Ptf - s Ptf = Ptf ( 1 – s ), ossia,Pmf = Ptf ( 1 – s ) che è il legame cercato.
Le considerazioni svolte confermano, anche, la possibilità di introdurre nel circuito,
equivalente, della macchina asincrona, la resistenza di carico Rm data da:
Rm = R2 ( 1 – s ) / s.
La resistenza di carico Rm tiene conto, per ogni fase, della potenza fornita al carico
meccanico totale, equivalente al carico effettivo e alle varie resistenze meccaniche
che si oppongono al moto.
Si conclude mettendo in evidenza il circuito equivalente completo di una macchina
asincrona:
Z1
I1f
V1f
Z2
I2’
I0
Y0
I2
Rm =
R2( 1 – s ) / s
E1
E2
FUNZIONAMENTO A CARICO, BILANCIO DELLE POTENZE
Il funzionamento a carico di una macchina asincrona trifase si può studiare
mediante il circuito equivalente monofase disegnato poco sopra, ( nella
rappresentazione superiore si ipotizza la configurazione base stella – stella ) .
L’equazione della maglia rotorica può essere così scritta:
E2 = ( R2 / s ) I2 + j X2d I2;
bisogna inoltre tenere conto che, I2’ = - I2 / K0,
ed infine è anche, I1 = I0 + I2’.
L’equazione di Kirchoff, applicata alla maglia statorica, consente di scrivere:
V1f = - E1 + R1 I1 + jX1d I1.
81
Trasferendo sul piano di Gauss le relazioni indicate si ottiene il diagramma vettoriale,
di una singola fase, della macchina asincrona:
jX1d I1
V1f
R1I1
I2’
- E1
I1
I0
R2 I2 /s
E20
jX2d I2
I2
E1
Come si osserva il diagramma vettoriale è molto simile a quello di un trasformatore,
ma con delle differenze:
il diagramma della macchina asincrona trifase cambia con lo scorrimento, dato
che con lo scorrimento s si modifica il modulo e la fase della corrente I2, ( e di
conseguenza si modificano tutte le altre grandezze ad essa legate );
la caduta di tensione della maglia statorica è percentualmente maggiore rispetto
al trasformatore, perché lo statore della m. a. t vanta una reattanza di valore
maggiore;
non compare la tensione secondaria in quanto l’avvolgimento rotorico è chiuso
in corto circuito.
POTENZE E LORO BILANCIO
La potenza complessivamente assorbita dalla m.a.t, ( considerando il contributo
delle tre fasi ), vale:
Pa = ( √3 ) V1 I1 cosφ1.
Per arrivare alla potenza resa Pr in uscita dalla macchina è necessario considerare
tutte le perdite che si sviluppano sia nello statore che nel rotore, seguendo questo
diagramma di flusso:
STATORE
ROTORE
Pt
Pm
Pa
82
Pr
Pav
PJ2
PJ1
+
Padd
PFE
Le perdite nel ferro PFE sono rappresentate sul circuito equivalente dalla potenza
attiva assorbita dal componente G0 dell’ammettenza Y0 e, risultano pari a:
PFE = 3 G0 E1² = circa = 3 G0 (V1f )² = 3 G0 ( V1 / √3 )² = G0 V1²,
avendo considerato, E1 = circa = V1f = V1 / √3, a causa del valore ridotto della
caduta di tensione sull’impedenza Z1. ( In realtà questa approssimazione è meno
giustificata, rispetto alla stessa approssimazione fatta sul trasformatore, a causa di un
valore maggiore di reattanza di dispersione ). Nel diagramma di flusso superiore si
considerano solo le perdite nel ferro dello statore, poiché le medesime perdite nel
rotore sono trascurabili. Le perdite nel rame dello statore, PJ1, sono date da :
PJ1 = 3 R1 I1².
Alle perdite nel rame statorico vanno aggiunte le perdite addizionali, che si
considerano pari al 0,5 % della potenza assorbita: Padd = 0,005 Pa.
Osservazione
Le perdite addizionali sono state imputate nella parte statorica, ma
in realtà si verificano in tutta la macchina.
Si osserva dal diagramma di flusso che: Pt = Pa – ( PFE + PJ1 + Padd ), che
rappresenta la potenza trasmessa da statore e rotore, mediante il campo magnetico
rotante. Si osserva pure che: Pt = 3 Ptf = 3 R2 I2² / s.
Le perdite nel rame del rotore sono date dalla seguente relazione:
PJ2 = 3 R2 I2², dove R2 rappresenta la resistenza elettrica del rotore, relativa ad una
singola fase. Confrontando queste due ultime relazioni si ricava un’importante
relazione: Pt = 3 R2 I2² / s = PJ2 / s, da cu deduco, PJ2 = s Pt .
La differenza Pt – PJ2 = Pm rappresenta, come si è già detto in precedenza, la
potenza meccanica totale fornita all’albero. Questa potenza Pm depurata dalle
perdite dovute ai vari attriti e per la ventilazione, della parte rotante, definisce infine,
la potenza resa Pr, all’albero dalla macchina asincrona.
In conclusione, si possono utilizzare nel bilancio delle potenze di una macchina
asincrona, le seguenti relazioni, ( che risultano tutte equivalenti fra loro ):
Pr = Pa – Pp = Pa – ( PFE + PJ1 + Padd + PJ2 + Pav ) oppure,
Pa = Pr + Pp = Pr + PFE + PJ1 + Padd + PJ2 + Pav .
RENDIMENTO
Il rendimento η di una macchina asincrona si ottiene come rapporto fra la
potenza resa e la potenza assorbita: η = Pr / Pa = ( Pa – Pp ) / Pa.
In particolare si evidenzia che il rendimento di una macchina asincrona aumenta con
la potenza e diminuisce col numero di poli, con valori a pieno carico che vanno dal
60% al 92%.
83
ESERCIZIO
Una macchina asincrona alimentata da una tensione di V1 = 400 V
assorbe una corrente I1 = 15 A con cosφ1 = 0,78. Sapendo che,
s% = 3,5 %, la PFE = 110 W, PJ1 = 150 W, Pav = 120 W. Calcolare
la potenza trasmessa, la potenza resa ed il rendimento.
Noi sappiamo che la potenza assorbita si ottiene dalla relazione seguente:
Pa = ( √3 ) V1 I1 cosφ1 = ( √3 ) 400 . 15 . 0,78 = 8106 W.
La potenza addizionale si può così calcolare, ammettendo che essa valga lo 0,5 %
della Pa stessa:
Padd = 0,005 . 8106 = circa = 41 W. Ricordando che la potenza
trasmessa si ottiene come:
Pt = Pa – ( PFE + PJ1 + Padd ) = 8106 – ( 110 + 150 + 41 ) = 8106 – 301 = 7805 W.
Noto il valore della potenza trasmessa siamo in grado di dedurre il valore delle
perdite rotoriche, attraverso la relazione seguente:
PJ2 = s Pt = ( s% / 100 ) Pt =( 3,5 / 100 ) 7805 = 0,035 . 7805 = circa = 273 W, di
conseguenza la potenza resa Pr risulta data da,
Pr = Pa – Pp = Pa – ( PFE + PJ1 + Padd + PJ2 + Pav ) = Pt – PJ2 – Pav =
= 7805 – 273 – 120 = 7412 W.
Il rendimento η sarà allora uguale a : η = Pr / Pa = 7412 / 8106 = 0,914 = 91,4%.
FUNZIONAMENTO A VUOTO
Il motore asincrono trifase funziona a vuoto quando non vi è alcun carico
meccanico collegato all’albero. L’avvolgimento statorico è alimentato alla tensione
V1 ed assorbe la corrente a vuoto I0, molto ridotta rispetto al valore nominale a
carico e molto sfasata, poiché in questo funzionamento risulta prevalente la potenza
reattiva rispetto a quella attiva. Si ricorda che le fasi rotoriche sono chiuse in corto
circuito, a differenza del secondario del trasformatore i cui morsetti sono aperti.
Inoltre, questo tipo di funzionamento si può pensare come un funzionamento in cui il
motore deve vincere solo gli attriti meccanici, di ventilazione e risulta mancante il
carico applicato all’albero. In questa situazione l’albero del motore raggiunge valori
prossimi a quelli del sincronismo. In questo caso ne risulta che:
P0 = ( √3 ) V1 I0 cosφ0 ; Q0 = ( √3 ) V1 I0 senφ0; S0 = V1 I0.
La potenza Q0 è associata al campo magnetico, che si determina anche in questo
funzionamento, mentre la potenza attiva P0, essendo nulla la potenza resa Pr, è la
somma delle perdite che permangono nel funzionamento a vuoto, che sono:
la perdita meccanica per attriti e ventilazione Pav;
la perdita nel ferro, localizzata quasi per intero, nello statore e proporzionale a
V², ( se la tensione del funzionamento a vuoto corrisponde a quella di
funzionamento a carico, le perdite nel ferro rimangono costanti );
la perdita nel rame statorico a vuoto, ossia PJ10 = 3 R1 I0².
In base a quanto detto il bilancio delle potenze durante il funzionamento a vuoto,
risulta uguale a: P0 = Pfe + PJ10 + Pav, mentre il rendimento è nullo, essendo
nulla la potenza resa Pr . La prova a vuoto viene condotta per determinare, in modo
indiretto il valore del fattore di potenza a vuoto, ossia cosφ0:
cosφ0 = P0 / (( √3 ) V1 I0 ).
84
ESERCIZIO
Dalla prova a vuoto di una m.a.t si è ottenuto: V1 = 380 V,
P0 = 350 W, I0 = 3,7 A; Pav = 60 W. Sapendo che R1 vale 1,2 ,
si calcoli il valore del cosφ0.
Per la relazione poco sopra ricavata se ne ricava che:
cosφ0 = P0 / (( √3 ) V1 I0 ) = 350 / ( √3 ) . 380 . 3,7 = 0,144.
Possiamo anche calcolare la perdita nel rame statorico a vuoto, mediante la relazione:
PJ10 = 3 R1 I0² = 3 . 1,2 . ( 3,7 )² = 49,3 W.
Le perdite nel ferro Pfe si possono determinare nel modo seguente:
Pfe = P0 – PJ10 – Pav = 350 – 49,3 – 60 = 240,7 W.
FUNZIONAMENTO A ROTORE BLOCCATO
Questo tipo di funzionamento si verifica quando il rotore è fermo, per cui la
sua velocità è nulla e lo scorrimento è unitario, ( s = 1 ). In pratica questo
funzionamento si verifica nell’istante iniziale dell’avviamento del motore, oppure, in
caso di guasto meccanico, in cui si blocca la rotazione dell’albero. Questo tipo di
funzionamento è anche detto, in corto circuito, ma la dicitura è ambigua, in quanto le
fasi rotoriche sono collegate in corto circuito, anche durante il funzionamento
normale. Il circuito equivalente, tracciato a pag. 81, in questo funzionamento si
modifica, essendo per s = 1, Rm = 0, nel modo seguente:
I1cc
R1
R2
X1d I0 I2cc’
X2d
V1f
Y0
E1
E02
I2cc
La corrente rotorica di corto circuito è data dalla relazione seguente:
I2cc = E02 / ( √ R2² + X2d ² ), il cui valore è
Notevolmente più elevato di quello che si ha durante il funzionamento normale.
Nello statore viene richiamata la corrente I2cc’ = I2cc / K0, anch’essa di valore
elevato. La corrente statorica di corto circuito è data dalla somma vettoriale:
I1cc = I0 + I2cc’.
In questo caso la corrente I2cc’ prevale nettamente su quella a vuoto, la quale si può
anche trascurare ed ammettere: I1cc = circa = I2cc’ = I2cc / K0.
A questo punto, posso considerare di riportare a statore tutti i parametri rotorici e
trascurare i parametri trasversali, ottenendo il seguente circuito equivalente:
Lo schema di principio risulta essere il seguente:
I1cc
j X1d
R2’
jX2d’
85
R1
V1f
dove, R2’ = K0² R2 e X2d’ = K0² X2d, oppure posso ammettere anche questo
circuito :
con
R1cc = R1 + R2’
R1cc
e
j X1cc
X1cc = X1d + X2d’
V1f
Z1cc
Come si osserva i circuiti equivalenti sono analoghi a quelli relativi al trasformatore.
La corrente I1cc è data da:
I1cc = V1f / Z1cc = V1f / √( R1cc² + X1cc² ) = V1 / ( √3 . √( R1cc² + X1cc² ) ),
ed il suo valore rappresenta, nella pratica, il valore della corrente all’avviamento o
allo spunto, della macchina asincrona trifase. In definitiva, è il valore di corrente che
viene assorbita dal motore nella fase iniziale del suo avviamento, ( normalmente il
valore di questa corrente, per i rotori a gabbia semplice, è dell’ordine di 8 – 10 volte
superiore al valore nominale della corrente o di I1n ).
Il diagramma vettoriale, sotto riportato, sintetizza il funzionamento a rotore bloccato
del motore asincrono:
La corrente I1cc, come si osserva
dal grafico, è sfasata in ritardo
φcc
rispetto alla V1f dell’angolo di
I1cc
corto circuito φcc.
j X1cc I1cc
V1f
R1cc I1cc
Per quanto riguarda le potenze, nel funzionamento a rotore bloccato si possono
effettuare le seguenti considerazioni:
la potenza resa e le perdite meccaniche sono nulle, essendo il rotore fermo;
le potenze perse negli avvolgimenti in rame sono massimi, essendo
proporzionali a I². La perdita complessiva negli avvolgimenti statorici e
rotorici assumono la forma: Pjt = 3 R1 I1cc² + 3 R2 I2cc² = 3 R1cc I1cc²;
si hanno anche le perdite nel ferro, dato che il motore è alimentato. Si osserva
che le perdite nel ferro rotoriche sono massime, in quanto fr = f poiché s = 1;
si hanno anche le perdite addizionali Padd.
86
La potenza assorbita, Pacc, dal motore nelle condizioni di funzionamento a rotore
bloccato, sono date da: Pacc = Pjt + Pfe + Padd.
In questo caso il rendimento è nullo essendo la potenza resa Pr nulla.
Il funzionamento a rotore bloccato viene eseguito in laboratorio, nella cosiddetta
prova a rotore bloccato o prova in corto circuito, alimentando il motore asincrono
ad una tensione ridotta, in modo tale che negli avvolgimenti di statore circoli la
corrente nominale I1n. Normalmente, si indica con V1cc la tensione di corto circuito,
che è in grado di far circolare nelle fasi statoriche la corrente nominale I1n e,
normalmente, assume un valore pari al 20 % – 30 % della tensione nominale V1n.
Come si vede è una tensione di corto circuito nettamente superiore a quella del
trasformatore, ciò perché nelle macchine asincrone si ha una reattanza X1cc di valore
nettamente superiore. In questa prova, essendo la tensione di alimentazione di valore
ridotto, è possibile trascurare le perdite nel ferro, le perdite addizionali e ritenere che
la potenza assorbita, nel funzionamento a rotore bloccato, corrisponda alle sole
perdite nel rame totali. Infine da questa prova si deducono le seguenti grandezze:
Z1cc = V1cc / ((√3) I1n) ; R1cc = Pccn / 3 I1n², avendo indicato con Pccn la potenza
di corto circuito con corrente nominale I1n ; X1cc = √( Z1cc² - R1cc²) ; ed infine si
ha cosφcc = Pccn / ((√3) V1cc I1n), oppure, cos φcc = R1cc / Z1cc.
ESERCIZIO
Nella prova a rotore bloccato di una m.a.t sono stati misurati i
seguenti valori: V1cc = 38 v; Pccn = 350 W; I1n = 24 A.
Sapendo che: R1 = 0,12 e K0 = 2,8, calcolare il fattore di
potenza di corto circuito, i parametri equivalenti longitudinali
statorici, la resistenza R2 di ogni fase rotorica. Calcolare la
corrente I1cc con tensione V1 = 380 V.
Applicando le formule appena introdotte si ricavano i valori incogniti richiesti.
Z1cc = V1cc / ((√3) I1n) = 38 / (√3) 24 =
R1cc = Pccn / 3 I1n² = 350 / 3 . 24² =
= 0,914
= 0,203
X1cc = √( Z1cc² - R1cc²) =
cosφcc = Pccn / ((√3) V1cc I1n) =
= 350 / (√3) . 38 . 24 =
= √ 0,914² - 0,203² = 0,891
= 0,222
Se cosφcc = 0,222 circa l’angolo φcc è circa di 77,2°.
Viene richiesta anche la resistenza rotorica R2. Ricordando che,
R1cc = R1 + K0² R2
possiamo dedurre la relazione con la quale ricavare R2. Infatti si desume che:
R2 = ( R1cc – R1 ) / K0².
Nel nostro caso si avrà allora che: R2 = ( 0,203 – 0,12 ) / 2,8² = 0,0106 = 10,6 m.
Infine la corrente di corto circuito con tensione pari a 380 V si ricava, applicando la
seguente relazione:
I1cc = V1f / Z1cc = V1 / ( √3 . Z1cc ) = 380 / √3 . 0,914 = circa = 240 A.
87
Come si osserva il suo valore è pari a 10 I1n; infatti risulta circa uguale a 10 il
rapporto fra V1n / V1cc. Nel nostro caso è: V1n = 380 V e V1cc = 38, di
conseguenza è proprio, 380 / 38 = 10.
non prendo in considerazione il circuito
equivalente statorico.
In questi miei appunti
DATI DI TARGA DEL MOTORE ASINCRONO TRIFASE
Anche i motori asincroni trifasi sono caratterizzati dai dati riportati sulla
targhetta dal costruttore. La targhetta riporta i valori nominali delle grandezze
elettriche più significative. I principali dati di targa sono:
il numero di poli 2p;
la tensione nominale V1n;
la frequenza nominale f;
la velocità nominale
nn, che corrisponde alla velocità angolare rotorica a cui il motore ruota nel
funzionamento nominale, Ad essa risulta legato lo scorrimento nominale sn, mediante
la seguente relazione: nn = n0 ( 1 – sn ).
La potenza nominale Pn, che corrisponde alla potenza meccanica resa al carico;
la corrente nominale I1n; il fattore di potenza nominale cosφn; il rendimento
nominale ηn, che corrisponde al rapporto fra la potenza resa e la potenza assorbita,
durante il funzionamento nominale. Si tenga conto che, la potenza assorbita, nelle
condizioni nominali vale: Pan = √ 3 . V1n . I1n cosφn = √ 3 . Vn . In cosφn .
Infine un dato di targa importante è la coppia nominale Cn, dove si ha:
Cn = ( 60 / 2 ) ( Pn / nn ).
Spesso, vengono aggiunte altre informazioni, che riguardano il tipo di collegamento
delle fasi statoriche, la classe di isolamento della macchina ed il grado di protezione
IP dell’involucro, della macchina stessa e della morsettiera.
ESERCIZIO
Una m.a.t risulta avere i seguenti dati: Pn = 30 kW; 2p = 4 poli;
Vn = 380 V; In = 60 A; cosφn = 0,83; nn = 1440 giri / min.
Si calcoli la potenza da essa assorbita, il rendimento e la coppia
Nominale.
Pan = √ 3 . Vn . In cosφn =
ηn = Pn / Pan =
= √ 3 . 380 . 60 . 0,83 =
= 30000 / 32777 = 0,915
= circa = 32777 W
ηn % = 91,5 %
Cn = ( 60 / 2 ) ( Pn / nn ) =
= ( 60 / 2 ) ( 30000 / 1440 ) =
= 9,55 . 20,83 = circa = 199 Nm
CURVE CARATTERISTICHE DEL MOTORE ASINCRONO TRIFASE
Queste curve si dicono anche caratteristiche di funzionamento della
macchina asincrona e si determinano sperimentalmente sia con metodi diretti che
indiretti. Queste curve caratteristiche descrivono l’andamento di alcune grandezze
88
tipiche, in funzione della frazione di carico = Pr / Pn. In pratica la frazione di
carico si determina dal rapporto fra la potenza resa e la potenza nominale della
macchina. Il valore = 0 indica il funzionamento a vuoto, mentre = 1 indica il
funzionamento a carico nominale o a pieno carico. Infine, se è > 1, il motore
asincrono risulta sovraccaricato. Si ricorda che % = 100 Pr / Pn.
L’andamento qualitativo del rendimento e del fattore di potenza, in funzione della
frazione di carico, è visibile dalla seguente figura:
η ; cosφ
η
Dalla figura si osserva che il
1
cosφn
rendimento parte da zero e raggiunge
ηn
il valore massimo intorno al 50% del
0,8
pieno carico. Per % = 100% si ha il
0,6
cosφ
rendimento nominale. Si osserva,
0,5
inoltre, che ai bassi carichi i
0,4
corrispondenti valori del rendimento
sono molto bassi, in quanto hanno
0,2
un’incidenza notevole le perdite nel
cosφ0
%
ferro e meccaniche rispetto alla
25
50 75
100
potenza
Per quanto riguarda il fattore di potenza si osserva
che laresa.
curva parte dal cosφ0, che è
alquanto ridotto, aumentando con il valore di , mantenendo comunque un valore
abbastanza costante, ( circa pari a quello nominale ). Ai bassi carichi il f.d.p assume
valori piccoli, poiché prevale la potenza induttiva assorbita dal motore.
Nelle figure sotto riportate sono rappresentate due caratteristiche importanti, ossia
rispettivamente, l’andamento della corrente assorbita dalle fasi statoriche, in funzione
della frazione di carico , e, l’andamento dello scorrimento percentuale, sempre in
funzione della frazione di carico .
I1
s%
In
sn %
I0
%
0
25
50 75
%
100
La corrente come si osserva,
dalla curva superiore, parte dal
valore I0, corrispondente al
valore della corrente a vuoto,
ed aumenta con la potenza
resa, in quanto cresce la
potenza attiva assorbita, e di
conseguenza anche la corrente.
0
89
25 50 75 100
Come si osserva dalla curva
superiore, l’andamento dello
scorrimento percentuale risulta
crescere all’aumentare della
frazione di carico, più
propriamente da un valore
circa zero a vuoto, dove s = s0
fino a valori del 3% - 4% a
pieno carico.
CARATTERISTICA MECCANICA DEL MOTORE ASINCRONO TRIFASE
La caratteristica meccanica di un motore asincrono è un grafico che
rappresenta l’andamento della coppia C sviluppata dal motore in funzione della sua
velocità n. Tale caratteristica si può descrivere anche in funzione dello scorrimento
s, in quanto lo scorrimento s è legato alla velocità n.
La relazione che lega la coppia alla velocità, attraverso la seguente relazione
generale:
C = P / .
In relazione ai valori associati alla P ed alla si hanno diversi tipi di coppia:
la coppia trasmessa Ct, detta anche coppia elettromagnetica, ed è data dal rapporto
Ct = Pt / 0 = PJ2 / s 0 ,
in quanto è la coppia che esercita lo statore sul rotore per mezzo del campo
magnetico rotante a velocità 0 ;
la coppia meccanica totale Cm, che è data dal rapporto Cm = Pm / . Essa
rappresenta la coppia associata alla potenza meccanica fornita all’albero con velocità
. Si osserva che essa non è ancora la coppia utile, dato che la Pm comprende anche
le perdite per attrito e ventilazione. Si può verificare che le due coppie introdotte
hanno lo stesso valore:
Cm = Pm / = Pt – PJ2 / , ma
= 2 n / 60 e ricordando che, s = n0 – n / n0, da cui n0 s = n0 – n e da ciò posso
anche ammettere, che n = n0 – n0 s = n0 ( 1 – s ). Ora se moltiplico ambo i membri
della relazione ottenuta per 2 / 60 si ottiene:
( 2 / 60 ) n = ( 2 / 60 ) n0 ( 1 – s ), ossia
= 0 ( 1 – s ).
Quest’ultima relazione ci consente di scrivere:
Cm = Pm / = Pt – PJ2 / = ( Pt – PJ2 ) / (0 ( 1 – s ) ), ma è anche vero che,
PJ2 = s Pt e perciò scriverò,
Cm = Pm / = ( Pt – PJ2 ) / (0 ( 1 – s ) ) = ( Pt – s Pt ) / (0 ( 1 – s ) ) =
= Cm = Pt ( 1 – s ) / (0 ( 1 – s ) ) =
= Cm = Pt / 0 = Ct , come volevasi dimostrare.
La coppia meccanica resa Cr è la coppia che il motore fornisce al carico meccanico
ad esso applicato, ossia i tratta della cosiddetta potenza utile. Essa si ottiene dal
rapporto fra la potenza resa Pr e la velocità dell’albero. Questa coppia risulta
leggermente minore della coppia meccanica totale Cm, essendo la potenza resa data
da:
Pr = Pm – Pav < Pm.
Tenendo conto che il circuito equivalente semplificato statorico assume la seguente
forma:
90
I2’
I1
j X1d
R2’
jX2d’
R1
V1f
I0
Rm’
Y0
oppure si può considerare lo schema,
I1
R1cc
j X1cc
I0
V1f
I2’
Rm’
Y0
possiamo ricordare che, R2’ + Rm’ = R2’/ s ed inoltre si ha,
PJ2 = 3 R2’ I2’²;
I2’ = ( V1 / √ 3 ) / √ ( ( R1 + R2’/s )² + ( X1d + X2d’ )² ).
Scriveremo allora la Ct, che d’ora innanzi indicheremo solo come C, in questo modo:
C = Ct = Pt / 0 = PJ2 / s 0 = 3 R2’ I2’² / s 0 = ( tenendo conto che è possibile
esprimere 0 come 2 f / p ) = 3 R2’ I2’² / ( s 2 f / p ) = ( 3 p R2’ I2’² ) / ( 2 f s ) =
= C = ( 3 p R2’ / 2 f s ) . ( V1 / √ 3 )² / √ ( ( R1 + R2’/s )² + ( X1d + X2d’ )² )² =
p R2’ V1²
=C=
( 2 f s ) . (( R1 + R2’/s )² + ( X1d + X2d’ )² )
Quest’ ultima relazione fornisce un’ottima approssimazione del legame esistente fra
la coppia e lo scorrimento. In altri termini fornisce la caratteristica meccanica del
motore nell’ipotesi di un funzionamento a tensione costante.
Analizzando il legame fra la coppia e lo scorrimento si possono dedurre le seguenti
conclusioni:
per s = 0, ( sincronismo ), la coppia C risulta nulla;
per s = 1, ( avviamento ), si ottiene la coppia di avviamento o di spunto, il cui
valore è: Ca = ( p R2’ V1² ) / (( 2 f ) . (( R1 + R2’ )² + ( X1d + X2d’ )² )),
che come si osserva dipende dal quadrato della tensione di alimentazione;
esiste un valore di scorrimento, detto scorrimento critico ed indicato con scr,
per il quale la coppia assume il valore massimo CM, i cui valori sono dati dalle
seguenti relazioni: scr = R2’ / ( √ (R1² + ( X1d + X2d’ )² ) e ne segue che per
CM è, CM = ( p V1² ) / ( 4 f ) ( R1 + √ ( R1² + ( X1d + X2d’ )² ). Nell’ipotesi,
91
come spesso accade che la resistenza R1 sia trascurabile, allora le relazioni
precedenti assumono la seguente forma semplificata, scr = R2’/ ( X1d + X2d’ )
e
CM = ( p V1² ) / ( 4 f ( X1d + X2d’ )).
L’andamento della caratteristica meccanica è riportata nella figura qui di seguito
tracciata:
C
CM
Cn
Ca =
coppia di avviamento
s
0 sn scr 0,5
1
n = n0
n=0
Spesso lungo l’asse delle ascisse viene posta la velocità n. Si osservi dallo stesso
grafico che nei punti limiti s = 0 ed s = 1 corrispondono rispettivamente n = n0 e
n = 0.
Vogliamo qui invece, rappresentare l’andamento della coppia C in funzione del
numero di giri n:
C
punto critico
CM
Caratteristica di
Caratteristica di
funzionamento
funzionamento
Cn
P Cr
INSTABILE
STABILE
Ca
0
ncr nn n0
n
La retta di colore blu rappresenta la coppia resistente che viene determinata dal
carico. Inoltre il punto P, visibile nel grafico superiore, rappresenta il punto di
lavoro della macchina.
La velocità critica ncr per la quale si ha la coppia massima CM si ha per.
ncr = n0 ( 1 – scr ).
E’ importante notare che sul valore dello scorrimento critico influisce notevolmente
la resistenza R2’ = K0² R2. In altri termini sullo scorrimento critico incide molto il
valore della resistenza rotorica, di conseguenza:
all’aumentare della resistenza rotorica aumenta lo scorrimento critico e
diminuisce la velocità critica, mentre la coppia massima rimane costante,
92
essendo indipendente da R2’. Si osserva pure che, all0aumentare della resistenza
rotorica aumenta la coppia di spunto del motore.
Nel funzionamento normale è bene che la resistenza rotorica sia di valore piccolo, per
avere perdite più contenute nel rame rotorico e per consentire al rotore di viaggiare a
velocità prossime a quelle di sincronismo. Normalmente il valore dello scorrimento
critico varia tra il 10% - 20%.
In questo grafico vengono rappresentate le caratteristiche meccaniche relative a
diversi, ( a tre ), valori della resistenza rotorica:
C
CM
3
Ca3
2 Ca2
1 Ca1
0
scr1
scr2 scr3
Il punto di lavoro meccanico è determinato dal punto di intersezione tra la
caratteristica meccanica del motore e quella della coppia resistente del carico. Se la
velocità corrispondente al punto P è quella nominale, l’ordinata Cn, del punto P,
costituisce la coppia nominale.
Tenendo conto delle considerazioni svolte anche in precedenza possiamo dire che:
per velocità comprese tra ncr ed n0 si è in condizioni di equilibrio meccanico
stabile, in quanto ad un rallentamento corrisponde una aumento della coppia
motrice e viceversa;
per velocità inferiori a ncr si è in condizioni di equilibrio meccanico instabile;
la velocità di coppia massima costituisce il valore critico di confine tra le due
condizioni.
ESERCIZIO
Per un motore asincrono trifase con rotore avvolto valgono i
seguenti dati: V1 = 380; f = 50 Hz; p = 2 coppie polari; K0 = 2,5.
Inoltre con R2 = 20 m si ha ncr = 1350 giri /min. Se ne calcoli il
valore della coppia massima ed il nuovo valore della resistenza
rotorica R2 per avere la coppia massima all’avviamento.
Inizialmente è necessario determinare il valore dello scorrimento critico, per poi
risalire al valore della reattanza di dispersione totale utilizzando le relazioni
precedenti e il valore della coppia massima.
Calcoliamo la velocità di sincronismo:
n0 = 60 f / p = 60 . 50 / 2 =
= 1500 giri / min
Lo scorrimento critico è dato da:
scr = n0 - ncr / n0 = 1500 – 1350 / 1500 =
= 0,1
93
X1d + X2d’ = R2’ / scr = K0² . R2 / scr =
= 2,5² . 20 . 10-3 / 0,1 = 1,25
Per calcolare la coppia massima teniamo
conto della seguente equazione:
CM = ( p V1² ) / ( 4 f ( X1d + X2d’ )),
che nel nostro caso risulterà uguale a,
CM = ( 2 . 380² ) / ( 628,32 . 1,25) =
= 367,71 Nm
Infine, per avere la coppia massima all’avviamento, deve risultare scr = 1, ossia
R2’ = X1d + X2d’ = 1,25 e da ciò scriveremo:
R2 = R2’ / K0² = 1,25 / 2,5² = 0,2 .
Il nuovo valore di R2 è 10 volte più grande di quello iniziale, essendo proprio uguale
a 10 il rapporto fra i due scorrimenti critici; infatti
10 . 20 m = 200 m = 0,2,
mentre 20 m corrispondono a 0,02 , e concludendo se scr = 0,1 per ottenere
scr = 1, devo moltiplicare il valore precedente per 10.
CENNI SUL FUNZIONAMENTO DA GENERATORE E DA FRENO DELLA
MACCHINA ASINCRONA
La macchina asincrona trifase può anche funzionare da generatore, anche se
questa sua utilizzazione non è molto frequente. Il generatore asincrono può trovarsi in
due configurazioni di funzionamento, ossia collegato ad una rete già in tensione a
frequenza costante per la presenza di altri generatori prevalenti:
motore
primo
G
3
oppure funziona in modo autonomo con collegamento ad un carico isolato, vedi
schema di principio qui sotto riportato:
motore
primo
Carico
G
3
94
C
Affinché la macchina funzioni da generatore devono verificarsi le seguenti
condizioni:
o il rotore deve essere posto in rotazione mediante un motore primo, nello stesso
verso e con velocità superiore a quella del campo magnetico rotante, in modo
tale da avere uno scorrimento negativo;
o le fasi statoriche devono essere collegate alla rete o al carico, a cui forniscono
la potenza elettrica attiva in uscita. Il funzionamento non avviene se alla
macchina non viene fornita potenza reattiva induttiva, ( di tipo magnetizzante ).
Nel caso in cui la macchina sia collegata ad una rete, la potenza induttiva è fornita
dalla rete stessa, in quanto essa vede il generatore asincrono come un carico reattivo
induttivo.
Nel funzionamento da generatore isolato si devono inserire dei condensatori, collegati
al circuito statorico che, assorbendo potenza reattiva capacitiva Qc, è come se
fornissero alla macchina potenza reattiva induttiva QL.
La caratteristica meccanica del generatore si ottiene prolungando per s < 0 la
caratteristica vista per il motore asincrono, come si può osservare dal grafico di figura
qui sotto riportato.
La coppia nel funzionamento da generatore viene considerata negativa.
Nel tratto in cui è s > 1, ed è una condizione in cui risulta n < 0, ossia è il caso in cui
la macchina viene fatta ruotare forzatamente in senso opposto al campo magnetico
rotante il suo comportamento è equivalente a quello di un freno.
Questo è proprio il suo regime di funzionamento da freno.
La figura, sotto riportata, rappresenta l’andamento qualitativo della caratteristica
meccanica della macchina asincrona trifase nei vari regimi di funzionamento:
C
95
s
1
funzionamento da
generatore con
s<0
funzionamento da
motore con
0 s 1
96
freno
con
s >1