Elettronica di Front End
nei rivelatori di particelle
Corso di formazione per personale tecnico
giugno – luglio 2011
Flavio Dal Corso
I tecnologo
INFN-Padova
Sommario
•
•
Introduzione Analog Signal processing nei rivelatori di particelle
Breve ripasso di elettronica fondamentale
• Transistors - BJT, JFET, MOSFET
• La transconduttanza
• Circuiti basilari
• L’Amplificatore Operazionale
• Funzione di trasferimento
• Impedenza d’ingresso con reazione R||C
•
Teoria del rumore
•
•
•
•
Rumore come processo stocastico ergodico
Potenza del rumore e spettro di potenza
Trasformazione dello spettro di rumore nei sistemi lineari
Tipi di rumore
• Johnson, Shot, Flicker
• Rappresentazione del rumore nelle reti – relazione tre noise figure,
temperatura di rumore e spettro del rumore
• Rumore nei componenti
• Resistori
• BJT, JFET, MOSFET
• Amplificatore Operazionale
2
•
Formazione del segnale nei rivelatori
• Teorema di Shokley-Ramo
• Soluzioni particolari
•
Blocchi funzionali di una catena analogica
• Modello del detector – accoppiamento DC o AC
• Preamplificatore
• Disegno di un amplificatore di carica
• Un amplificatore integrato custom
• Shaper (filtro)
• Teoria del filtro ottimo per misura di energia
•
•
•
•
Spettro di rumore in ingresso
Spettro di rumore in uscita
ENC
Forma del filtro ottimo
• Altre cause di perdita di risoluzione
• Panoramica sui filtri reali
• Filtri semigaussiani a poli complessi coniugati
• Uno shaper semigaussiano commerciale
• Uno shaper semigaussiano integrato
• Preamplificatori per situazioni particolari
• Adattamento ottimale con rivelatori ad alta capacità
• Matching capacitivo
• Matching con trasformatore
• Terminazione attiva
3
• Un premaplificatore commerciale
• Un premaplificatore a componenti discreti per rivelatore a bassa
capacità
• Filtro ottimo per misura del tempo
•
Read-out
• Acquisizione
• Sample & hold
• Peak Detector
• Pipeline Analogica
• Conversione digitale
•
•
•
•
•
•
•
Wilkinson ADC
ADC ad integrazione Dual Slope
ADC ad inseguimento
ADC ad approssimazioni successive
Flash ADC
Σ∆ ADC
Riferimenti e bibliografia
4
Analog Signal Processing
nei rivelatori di particelle
L’obbiettivo fondamentale del processamento dei segnali fornito dai rivelatori è
estrarre le informazioni rilevanti dal “rumore” ovunque presente, ottenendo il
migliore rapporto possibile tra il segnale utile e il rumore.
Sono due le quantità di maggior importanza che si possono estrarre dal segnale
di un rivelatore: la sua ampiezza e il tempo di occorrenza.
L’ampiezza è correlata all’energia e al tipo di particella;
la misura di tempo serve per lo più alla sua localizzazione (sebbene talvolta la
posizione si ricavi da misure di “baricentro” delle ampiezze in canali contigui).
I rivelatori che qui ci interessano “rivelano” il passaggio di una particella dalla
ionizzazione di un opportuno mezzo. Rilasciano quindi un segnale elettrico –
tipicamente una certa quantità di carica elettrica – in qualche misura
proporzionale all’energia della particella incidente.
5
Rivelatori che non producono un segnale elettrico (Čerenkov, transition
radiation, scintillatori …) richiedono eventualmente un secondo stadio di
rivelazione che trasformi il segnale originale in segnale elettrico (rivelatori ad
effetto fotoelettrico: PM, MCP, SiPD, APD, HPD, SiPM …). Dal punto di vista
dell’elettronica è quest’ultimo “il rivelatore”.
In altre situazioni la proporzionalità con l’energia è abbandonata a favore di un
segnale più ampio, qualora serva solo la misura di posizione o di tempo sulla
particella incidente; (RPC, LST, contatori Geiger …). In tali casi all’elettronica
può non essere richiesta amplificazione e ottimizzazione del rapporto
segnale/rumore, bastando una immediata digitalizzazione (discriminatori).
Nota sul termine “elettronica di front-end”
Spesso (anche in questa dispensa) questa locuzione è usata per indicare
complessivamente l’elettronica di processamento dei segnali analogici sviluppati
dai rivelatori di particelle, mentre a stretto rigore di termini, essa dovrebbe
indicare solo l’elettronica che riceve immediatamente il segnale del rivelatore e
che è posta nelle sue immediate vicinanze. Solitamente solo uno stadio
(preamplificatore o discriminatore) dell’intera catena di processamento risiede
fisicamente vicino al rivelatore.
6
L’elettronica di front end può dover affrontare due diverse situazioni:
1. La carica è proporzionale all’energia della particella incidente
(rivelatori proporzionali)
a) misura analogica della carica
b) misura analogica del tempo
⇒ amplificatori di carica – filtro ottimo
(a e b differiscono al livello del circuito di campionamento)
2. La proporzionalità con l’energia è abbandonata a favore di un segnale
più ampio, e serve solo l’informazione sul tempo di occorrenza del
segnale nel rivelatore (RPC, LST, contatori Geiger…)
a) misura digitale del tempo ⇒ discriminatori
Questo corso sarà dedicato alle tecniche di processamento analogico
finalizzate alla ottimizzazione delle misure di ampiezza e di tempo (punto 1),
lasciando ad altra occasione le tecniche basate su discriminatori (punto 2)
7
A grandi linee possiamo intendere per “signal processing” la formazione del
segnale nel rivelatore dovuta al passaggio della particella, la sua amplificazione
e “formatura” (signal shaping) utili ad ottenere il migliore rapporto
segnale/rumore, e il read-out.
Pertanto il corpo principale del corso sarà organizzato in tre parti:
1. studio della formazione del segnale nei rivelatori;
2. tecniche di processamento analogico, con particolare attenzione alle tecniche di
disegno degli amplificatori di carica, e presentazione di una ampia panoramica sui
filtri;
3. dedicata alle diverse tecniche di campionatura del segnale e di conversione
analogico-digitale, limitatamente alla tecniche tradizionali di campionamento unico
del segnale ad un istante ottimale, tralasciando tecniche più recenti (e poco usate
nell’ambito dei rivelatori di particelle) di campionamento continuo e ricostruzione
digitale del segnale.
Allo scopo di fornire gli strumenti necessari alla comprensione degli argomenti
presentati, sarà premesso un breve richiamo di elettronica fondamentale sul
funzionamento dei principali dispositivi, e un po’ di teoria del rumore,
necessaria alla comprensione delle tecniche di ottimizzazione del rapporto
segnale/rumore.
8
Breve ripasso del funzionamento dei
transistors e amplificatori operazionali
Presenterò una essenziale descrizione del principio di funzionamento dei
tre tipi di transistor – BJT, JFET, MOSFET – senza entrare nel dettaglio
di tutte le varianti possibili (gli esempi e i disegni si riferiranno solo a
dispositivi a canale n); introdurrò poi il concetto di transconduttanza, quindi
presenterò alcuni circuiti base, necessari alla comprensione degli
amplificatori che verranno illustrati in seguito.
Richiamerò poi brevemente l’amplificatore operazionale e svilupperò in
qualche dettaglio le configurazioni tipicamente usate per realizzare i filtri
dei processori analogici per rivelatori di particelle.
9
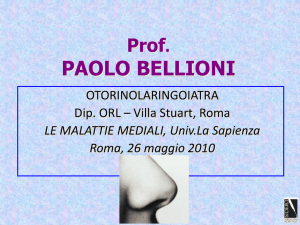
Il BJT
A grandi linee il BJT può essere visto come una
coppia di giunzioni PN contrapposte, in cui la
sezione centrale di semiconduttore è
estremamente sottile e la conformazione
geometrica è tale per cui il collettore racchiude
base ed emettitore.
La giunzione base-emettitore è polarizzata
direttamente, mentre la giunzione basecollettore è polarizzata inversamente.
I portatori iniettati dall’emettitore, per lo
spessore della base e la configurazione
geometrica, hanno alta probabilità di
attraversarla ed essere raccolti dal volume
depleto della giunzione di collettore.
Si ha quindi:
Ic = α Ie
e quindi
con α prossimo a 1
I b = I e − I c = 1−αα I c
⇒
Ic = β Ib
Con β = 20 ÷ 500
10
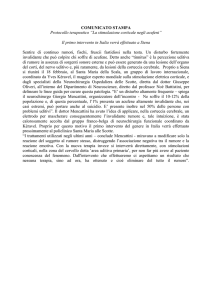
β non è indipendente dalla
corrente di collettore …
… né dalla frequenza
Il comportamento in dettaglio è definito dalle
caratteristiche d’uscita (sin) e di trasferimento (dx)
11
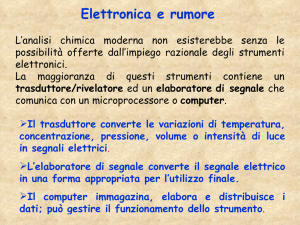
Il JFET
Il JFET è un dispositivo il cui la
conduzione di corrente avviene nello
spessore del semiconduttore (bulk), in
un canale la cui sezione viene
“strozzata” dalla zona di svuotamento
della giunzione inversa del gate.
La caratteristica d’uscita non è dissimile da quella del BJT, mentre è
alquanto diversa quella di trasferimento. Quindi con il JFET si potrà
realizzare un dispositivo da comportamento simile al BJT, ma con tensioni
di gate diverse da quelle di base di un BJT.
12
Il MOSFET
Il funzionamento del MOSFET si basa sullo stesso
principio del JFET, salvo che il canale di
conduzione è ricavato immediatamente sotto
l’ossido di isolamento del gate.
La caratteristica d’uscita è sostanzialmente
identica a quella del JFET, mentre quella di
trasferimento è assai variabile con il modello di
MOS (enanchement o depletion mode) e livelli di
drogaggio.
Benché il MOS sia usato prevalentemente come
interruttore (tra interdizione e zona ohmica), può
operare come dispositivo analogico in zona di
“saturazione” realizzando comportamenti non
dissimili dal BJT e JFET
Caratteristiche di un enanchement
MOS a canale n. Per un depletion
MOS la Vth scende a valori
negativi, e il comportamento
diviene quasi identico ad un JFET
13
La transconduttanza
Tutti e tre i dispositivi illustrati agiscono come “modulatori” della corrente
d’uscita (collettore o drain) in funzione della tensione d’ingresso (base o gate).
I segnali applicati al transistor possono essere visti come piccole variazioni dei
valori di polarizzazione, sufficientemente piccole da considerare lineare il
comportamento del transistor rispetto ai segnali. Si conviene di indicare con
lettere maiuscole i valori di polarizzazione e con minuscole i segnali.
La transconduttanza è il rapporto tra il segnale d’uscita (corrente) e il segnale
d’ingresso (tensione); è il “guadagno” del dispositivo:
io
i
∆I
∂I
gm ≡ o ≡ o ≈ o
vi ∆Vi ∂Vi
Si dimostra che per il BJT vale la relazione:
gm = Ic
Ic
q
≈
kT 25 mV
vi
gm
a T = 300° K
Mentre per JFET e MOSFET gm dipende dalla geometria del dispositivo
14
Circuiti basilari
Vediamo alcuni dei circuiti fondamentali che si possono costruire con i tre tipi
di transistors, quasi dei “bulding blocks” con cui affronteremmo più avanti
l’analisi di circuiti più complessi
(nei disegni c’è un JFET, ma potrebbe essere indifferentemente un BJT o un MOS).
VCC
Amplificatore a singolo transistor
R
(configurazione Common Emitter/Source)
v
−i R
Av ≡ o = o = − g m R
vi
vi
gm
vi
Common Base/Gate
Si dimostra che per tutti i tre tipi di dispositivo
l’impedenza d’ingresso di emettitore/source è ≈1/gm.
Quindi, se R>>1/gm, il trasferimento di corrente di
questo circuito vale (nel BJT si trascura la corrente di
base):
Ai ≡
io
≈ −1
ii
vo
io
ii
gm
R
15
Emitter/Source Follower
Si dimostra che se R>>1/gm, per tutti i tre tipi di
dispositivo vale la relazione:
gm
vi
v
Av ≡ o ≈ 1
vi
vo
R
(104-106 Ω
Poiché l’impedenza d’ingresso è alta
per BJT;
1010 -1014 Ω per JFET e MOS) e quella d’uscita è bassa, il
circuito “adatta” l’impedenza della sorgente al carico.
Cascode e Folded Cascode
Usando la definizione di gm e le proprietà
del common base/gate, per questi circuiti
si ha:
io
≈ gm
vi
Vcc
io
Vp
vi
gm
R
vi
Vp
gm
Quindi non modificano la transconduttanza del dispositivo d’ingresso, ma ne
migliorano molto la risposta in frequenza, perché inibiscono l’effetto della
capacità di drain.
Il folded cascode permette anche di aumentare la dinamica d’uscita.
io
16
Generatori di corrente
Esiste un’ampia gamma di circuiti che emulano un generatore di
corrente ideale, quindi con alta impedenza. Tutti generano
corrente dal collettore/drain, che è un terminale ad alta
impedenza (la corrente è ≈ indipendente dalla sua tensione). Le
migliori configurazioni arrivano ad impedenze dell’ordine di 107 Ω.
I
Vp
R
Vengono usati come elementi di polarizzazione di un circuito o come carichi
attivi per spingere l’amplificazione senza necessità di usare alte resistenze.
17
MOS come resistori
Un MOS polarizzato nella regione ohmica può sostituire una resistenza (con
grande risparmio di silicio, nei circuiti integrati). Il comportamento non sarà
molto lineare, ma dove non è critica la precisione, offrono un grande vantaggio
alla densità di integrazione.
18
Coppia differenziale
io
È il circuito d’ingresso degli amplificatori
operazionali. È costituito da una coppia di
dispositivi (BJT, JFET o MOS) identici,
accoppiati in emettitore/source, polarizzati con
un generatore di corrente sul nodo comune.
gm
vd/2
vcm
È sostanzialmente insensibile alla tensione di modo comune
ed amplifica solo la tensione differenziale:
gm
-vd/2
I
io g m
≈
vd
2
Al variare del tipo di dispositivo cambia solo l’ampiezza della zona lineare:
BJT
JFET
MOSFET
19
Amplificatore operazionale
È un amplificatore differenziale con elevato guadagno (anche oltre 106). Di
conseguenza gli ingressi sono quasi equipotenziali, pure essendo tra loro isolati;
si dice che sono in contatto “virtuale”.
Con gli operazionali si realizzano una grande varietà di funzioni, che non
possiamo qui analizzare. Mi limiterò a presentare alcuni concetti ed alcuni
circuiti utili all’analisi di un processore analogico di segnali da rivelatori.
Nella configurazione più comune le
funzioni di trasferimento rispetto ai due
ingressi sono:
Zf
vo
=−
v1
Zd
Zf
vo
= 1+
v2
Zd
Zf
v1
v2
Zd
A
vo
20
Configurazione tipica – impedenza d’ingresso
Usualmente, nelle nostre applicazioni, l’ingresso non invertente è posto a massa.
Esso quindi diviene un amplificatore invertente ad alto guadagno, privo
(idealmente) di offset in uscita.
Nel primo stadio dell’elettronica di front
end è richiesto un amplificatore
invertente ad elevato guadagno, che
quindi potrebbe essere fatto con un
operazionale con ingresso non invertente
a massa, ma diverse ragioni sconsigliano
questa scelta. L’amplificatore viene quindi
realizzato con il solo ingresso invertente,
il che comporta che abbia un
considerevole offset.
Cf
Cf
Rf
Rf
A
Charge
Preamp
A
OpAmp
Negli stadi successivi, invece, è conveniente usare amplificatori operazionali
commerciali.
Inoltre l’amplificatore di front end viene usato come integratore, quindi con
reazione R||C (resistore, di alto valore, in parallelo ad un condensatore).
21
È interessante valutare l’impedenza d’ingresso dell’amplificatore, nel caso sia
realizzato con un OpAmp commerciale oppure con un tipico preamplificatore da
front end.
Per il teorema di Miller, l’impedenza d’ingresso vale:
A
Z in =
Zf
1+ A
A>>1
→
A
+ s AC f
R
f
−1
ACf
Rf /A
quindi è come se all’ingresso ci fosse, verso massa, un condensatore ACf molto
grande (essendo A molto grande), che è la condizione ideale per un
integratore. Compare anche un resistore Rf/A, che disturba, ma è inevitabile;
nell’assunzione che Rf → ∞ essa è trascurabile.
Ma valutiamo come l’impedenza varia con la frequenza.
22
La risposta in frequenza
dell’amplificatore può, con buona
precisione, essere descritta in
termini del suo polo dominante:
A=
A0
1 + ωs0
Espressa anche l’impedenza di
feedback in termini del suo polo
ωf=1/RfCf essa diviene:
1 + A0
=
Z in =
1 + A (1 + ωsf ) 1 + ωs0
Zf
Rf
Che può essere riscritta così:
−1
Z in =
Rf
1 + ωs0
A0 (1 + ωsf )(1 +
s
A0ωo
)
23
Proviamo una stima numerica in queste condizioni:
• Zf data da:
• OpAmp commerciale con
• Rf=100 MΩ
• A0=120dB (=106)
• Cf=1pF
• ω0=314 s-1 (⇒ GBW=50MHz)
• ωf=104 s-1
Il modulo dell’impedenza è illustrato nella figura sottostante. Si vede che fino
a ω0 (50 Hz) l’impedenza è resistiva e bassa (100 Ω), poi cresce con andamento
induttivo fino a ωf (1590 Hz), dove riprende andamento resistivo con valore
relativamente alto (3184 Ω). Prende a decrescere con andamento capacitivo
solo a frequenza A0 ω0 (50 MHz).
Ω
2000
1000
500
200
100
1000
10000
100000.
1. × 10 6
1. × 10 7
1. × 10 8
Hz
1. × 10 9
Il risultato è che, nelle frequenze interessanti, è come se il segnale del
rivelatore venisse raccolto su una R||C con R≈kΩ e C=Cf,
che non è proprio la soluzione ideale!
24
Vediamo ora cosa succede usando 100000.
50000
un amplificatore da front end:
• Zf come prima
Ω
10000
5000
• Amplificatore invertente con 1000
500
• A0=60dB (=103)
1000
10000
100000.
1. × 10 6
1. × 10 7
1. × 10 8
Hz
1. × 10 9
• ω0=3,14·106 s-1 (⇒ GBW=500MHz)
Ora l’impedenza è resistiva e pari a Rf/A0 fino a ωf, dove diventa capacitiva.
Il risultato netto è, nelle frequenze di interesse, un impedenza d’ingresso dato
da una R||C con R=Rf/A0 che rimane abbastanza alta, e C=Cf ·A0, che è ciò che si
desidera.
Il trucco sta nell’avere il polo dominante dell’amplificatore più alto del polo del
feedback; ω0>>ωf.
Tra ω0 e Ao ω0 l’impedenza ritorna resistiva, ma a queste frequenze non si può
più (come implicitamente è stato fatto) trascurare la capacità del dispositivo
d’ingresso.
Una situazione interessante si ha quando ω0=ωf. Verrà ripresa in
considerazione più avanti.
25
Un po’ di teoria sul Rumore in elettronica
La teoria del rumore è ritenuta una disciplina oscura e difficile; cercherò di
dare qualche informazione, senza eccessiva pretesa di rigore.
Debbo presumere alcune conoscenze di analisi statistica, teoria dei circuiti,
trasformate di Fourier e Laplace.
In un sistema elettronico rumore è qualsiasi segnale che si sovrappone al
segnale utile, ostacolandone le misura.
Possiamo distinguere tra rumore deterministico, causato essenzialmente da
interferenze con altri sistemi o variazioni di parametri ambientali, che in linea
di principio (molto teoricamente) può essere analizzato in modo totalmente
deterministico e rimosso. Non verrà preso in considerazione in questo corso,
ma rimando ad una fonte fondamentale al rif. 7,
e rumore casuale, che non può essere analizzato se non in termini statistici e
non può mai essere totalmente rimosso, perché intimamente connesso alle
proprietà fisiche fondamentali dei componenti elettronici.
26
Rumore come processo stocastico ergodico
La forma d’onda del rumore, come ciò che si vede all’oscilloscopio quando la
sonda è connessa ad un circuito privo di segnale, è una funzione del tempo dalla
forma irregolare e del tutto imprevedibile.
Diciamo che è un processo casuale, e lo chiamiamo n(t). Comunemente per
descriverlo usiamo un unico valore: la deviazione standard (o valore rms), ma nel
fare ciò facciamo implicitamente alcune assunzioni non banali:
1. Assumiamo che la distribuzione statistica di n(t) sia indipendente dal
tempo
2. Assumiamo che la distribuzione sia gaussiana con media nulla
3. Assumiamo anche a priori che tale distribuzione esista per qualsiasi
circuito ed in qualsiasi circostanza.
Sono assunzioni che ci detta l’esperienza, ma su quali principi fisici e
matematici si fondano?
27
Per fissare le idee, poniamo che n(t) sia la tensione ai capi di una resistenza. A
causa dell’agitazione termica degli elettroni e degli atomi, in generale sarà
n(t)≠0.
Operativamente, come determiniamo la statistica di n(t), ad esempio la media?
1. Possiamo prendere una schermata
sufficientemente lunga all’oscilloscopio e
valutarne la media (statistica temporale).
2. Oppure possiamo prendere molti campioni a
tempi sufficientemente lontani tra loro da
poter assumere che siano statisticamente
indipendenti, e farne la media (statistica
d’insieme).
T
1
n = ∫ n(t )dt
T 0
n = E{n(ti )}
Se facciamo bene le cose (a meno di variazioni delle condizioni ambientali),
l’esperienza ci dice che otteniamo lo stesso risultato. In realtà non è neppure
raro che le misure non tornino, perché non sappiamo bene cosa voglia dire, nelle
preposizioni suddette, l’avverbio “sufficientemente”.
Come determinarne la statistica di n(t) senza fare assunzioni che non sappiamo
giustificare?
28
Poiché la resistenza è un insieme di ≈1023 particelle in equilibrio termodinamico
con l’ambiente, il cui microstato è impossibile da determinare, si usano alcuni
concetti della meccanica statistica(10).
Si ricorre ad un esperimento ideale, immaginando di disporre di un insieme
arbitrariamente grande di resistenze identiche (statistical ensemble),
idealmente una per ciascun dei microstati possibili della resistenza.
Avremmo quindi a disposizione un insieme {ni(t)} di processi casuali. L’insieme,
pensato come un tutt’uno, è chiamato processo stocastico.
processo stocastico = {ni(t)}
Il processo stocastico descrive, quindi, l’evoluzione temporale di tutti i
microstati possibili del sistema.
Ad ogni istante possiamo calcolare le grandezze statistiche del processo
(media, rms, densità di probabilità …) operando sugli elementi dell’insieme
(statistica d’insieme), e saranno in genere funzione del tempo.
29
Ad esempio, la media d’insieme degli ni può essere espressa come:
n (t )
∑
E{n (t )} =
=
i
i
i
{ni }
+∞
∫ np(n)dn
−∞
|{ni}| indica la cardinalità dell’insieme {ni},
p(n) è la densità di probabilità di {ni},
E sta per “expected value”
ed è, in genere, funzione del tempo.
Quando invece le grandezze statistiche d’insieme risultano indipendenti dal
tempo, il processo stocastico è detto stazionario.
Alternativamente alla statistica d’insieme, per un processo stazionario si può
valutare la statistica temporale.
Ad esempio la media temporale è espressa come:
1
µ ni = lim
T → ∞ 2T
+T
∫ n (t )dt
i
−T
ed è una variabile casuale (dipende dall’indice i ma non dal tempo),
i cui valori di aspettazione sono difficili da esprimere analiticamente.
30
Vi sono tuttavia dei processi in cui le due tecniche di calcolo conducono allo
stesso risultato; per esempio per la media:
1
∀(i, t ) µ ni = E{ni } ⇒ lim
T → ∞ 2T
+T
+∞
∫ n (t )dt = ∫ np(n)dn
i
−T
−∞
cioè le medie temporali sono tutte uguali e coincidono con le medie d’insieme,
che non dipendono dal tempo.
Tali processi sono detti ergodici.
Sintetizzando, possiamo quindi definire ergodico un processo stocastico in cui
le medie d’insieme sono uguali alle medie temporali.
Di conseguenza, tutte le proprietà statistiche di un processo ergodico possono
essere determinate per mezzo di una singola funzione del processo.
31
Il postulato fondamentale relativo all’analisi del rumore è che esso sia un
processo ergodico. Il fondamento della ragionevolezza del postulato sta nel
fatto che assumiamo la sorgente di rumore attiva ab eterno e, per il principio di
omogeneità del tempo, immutabili nel tempo le sue proprietà (a condizioni
ambientali ferme, ovviamente).
Si deve poi assumere che il valore medio del rumore sia nullo, per non violare
qualche principio fondamentale (la tensione di rumore di una resistenza deve
avere media nulla, per evitare che essa diventi una sorgente gratuita di
energia).
Infine, si deve ritenere che la distribuzione di probabilità del rumore sia
gaussiana: questo assunto è conseguenza del teorema del limite centrale e del
fatto che il rumore dipende da un grandissimo numero di fattori casuali.
Va comunque detto che alcune grandezze si definiscono più facilmente nella
statistica d’insieme (caso notevole, la densità di probabilità), altre nella
statistica temporale (caso notevole, l’autocorrelazione).
32
Riassumendo, il rumore è un processo casuale con queste proprietà:
•
È ergodico
•
Ha media nulla
•
Ha distribuzione normale (gaussiana)
È quindi completamente determinato statisticamente da un solo parametro; la
sua varianza (o dal valore rms, che della varianza è la radice quadrata).
+∞
1
E{ni } = ∫ n p(n) dn = lim
T →∞ 2T
−∞
2
2
+∞
2
n
∫ dt
≡ σ n2
−∞
33
Potenza del rumore e spettro di potenza
La varianza del rumore è chiamata potenza di rumore.
Può essere espressa sotto forma di un integrale nella frequenza:
∞
σ n = ∫ W ( f ) df
2
0
W(ν) è detto spettro della potenza di rumore, ed esprime la potenza di rumore
per unità di banda di frequenza.
Lo spettro di potenza è uno strumento fondamentale nell’analisi del rumore.
I datasheets dei componenti spesso riportano questo parametro (nella forma
della sua radice quadrata), oppure la noise figure, che è ad esso legato, come
vedremmo.
34
Teorema di Wiener-Khintchine
Lo spettro di potenza è esprimibile in termini della trasformata di Fourier della
autocorrelazione del rumore, cioè:
+∞
Wn ( f ) = 2 S (ω )
S (ω ) =
con
−iωτ
R
(
τ
)
e
dτ
∫
(ω = 2πf )
−∞
L’autocorrelazione è una grandezza statistica la cui prima definizione avviene
nel dominio della statistica d’insieme, ed esprime la correlazione tra due valori
della stessa variabile casuale, calcolati un due istanti diversi. Dà quindi una
misura di quanto lontani debbano due campioni di una stessa variabile casuale
per essere statisticamente indipendenti.
Rni (t1, t2 ) = E{ni (t1)ni (t2 )}
Per i processi ergodici l’autocorrelazione è funzione solo di t2-t1=τ e si può
esprimere con una media temporale:
1
Rn (τ ) = lim
T → ∞ 2T
Si vede subito che:
Rn (0) = σ n
+T
∫ n(t − τ )n(t ) dt
−T
2
35
Dimostrazione.
Data l’anti-trasformata di Fourier di R(τ):
+∞
1
R (τ ) =
2π
1
=
2π
1
=
2π
iωτ
ω
S
e
dω
(
)
∫
−∞
+∞
∫ S (ω ) [cos(ωτ ) + i sin(ωτ )] dω
−∞
+∞
+∞
∫ S (ω ) cos(ωτ ) dω + i ∫ S (ω ) sin(ωτ )] dω
−∞
−∞
poiché R(τ) è reale e simmetrica, anche S(ω) lo è.
Allora il secondo integrale è nullo e il primo può essere scritto:
2
R (τ ) =
2π
che per τ=0 dà:
+∞
∫ S (ω ) cos(ωτ ) dω
0
2
R ( 0) = σ =
2π
2
+∞
+∞
0
0
∫ S (ω ) dω = ∫ 2 S (ω ) df
36
Trasformazione del rumore nei sistemi
lineari
Un sistema elettrico lineare tempo-invariante deterministico (= privo di
rumore) può essere descritto mediante un operatore lineare:
x(t)
L
h(t) H(iω)
y(t)=L[x(t)]
Si dimostra che se x(t) è un processo ergodico, anche L[x(t)]=y(t) lo è,
purché il circuito sia attivo da sempre (ovvero, in pratica, sia esaurito il
transitorio). Lo studio del rumore non prevede l’analisi al transitorio, per tale ragione si usa la
trasformata di Fourier e non quella di Laplace.
Il comportamento del circuito è descritto anche dalla sua risposta all’impulso
h(t) o dalla sua funzione di trasferimento H(iω), legate dalla trasformata di
Fourier:
+∞
H (iω ) = ∫ h(t ) e −iωτ dt
−∞
1
h(t ) =
2π
+∞
iωτ
H
(
i
ω
)
e
dω
∫
−∞
37
Per i segnali deterministici applicati al circuito, valgono le ben note relazioni
(la lettera maiuscola indica la trasformata della corrispondente variabile con
lettera minuscola):
Y (iω ) = X (iω ) H (iω )
y (t ) =
+∞
+∞
−∞
−∞
∫ x(t − τ ) h(τ ) dτ = ∫ x(τ ) h(t − τ ) dτ
Per il rumore si dimostra una formula analoga, che
esprime lo spettro di rumore in uscita in funzione di
quello d’ingresso:
È una formula fondamentale nell’analisi del rumore.
Wo ( f ) = Wi ( f ) H (iω )
In una catena di sistemi posti in cascata, lo spettro di rumore del primo
stadio dà il maggior contributo al rumore totale, rispetto alle sorgenti
intermedie, che subiscono una amplificazione minore.
Per questo ragione l’analisi del rumore dei circuiti si concentra
particolarmente sullo stadio d’ingresso.
H1
W1
H2
W2
Wo
2
Wo = W1 H1 H 2 + W2 H 2
2
38
2
Dimostrazione della
Wo ( f ) = Wi ( f ) H (iω )
2
+∞
Dalla:
y (t ) =
∫ x(t − τ ) h(τ ) dτ
−∞
+∞
moltiplico prima per x(t-θ)
e poi per y(t+θ),
e valuto i valori d’aspettazione dei
due risultati (media d’insieme).
le medie sono rispettivamente la
correlazione tra x e y
e l’autocorrelazione di x e di y,
e dipendono solo dalla differenza dei
tempi (processi stazionari).
E{ y (t ) x(t − ϑ )} =
∫ E{x(t − τ ) x(t − ϑ )} h(τ ) dτ
−∞
+∞
E{ y (t + ϑ ) y (t )} =
∫ E{ y(t + ϑ ) x(t − τ )} h(τ ) dτ
−∞
E{ y (t ) x(t − ϑ )} = Rxy (ϑ )
E{x(t − τ ) x(t − ϑ )} = Rx (ϑ − τ )
E{ y (t + ϑ ) y (t )} = R y (ϑ )
E{ y (t + ϑ ) x(t − τ )} = Rxy (ϑ + τ )
39
Quindi si ha
(* indica la convoluzione):
+∞
Rxy (ϑ ) =
∫ R (ϑ − τ ) h(τ ) dτ = R (ϑ ) * h(ϑ )
x
x
−∞
+∞
R y (ϑ ) =
∫R
xy
(ϑ + τ ) h(τ ) dτ = Rxy (ϑ ) * h(−ϑ )
−∞
Passando alle trasformate di Fourier e
osservando che F[h(-t)]=H*(iω):
Combinando i risultati:
Ricordando il teorema di W-K:
S xy (iω ) = S x (iω ) H (iω )
S y (iω ) = S xy (iω ) H * (iω )
S y (iω ) = S x (iω ) H (iω )
2
Wy ( f ) = Wx ( f ) H (iω )
2
40
Nota sull’integrale di convoluzione
La formula di convoluzione permette di calcolare nel dominio del tempo la
risposta di un circuito.
La formula più usuale e nota è quella nel dominio della variabile di Laplace:
Y ( s) = X ( s) H ( s)
Ovvero, l’uscita del circuito è data dall’ingresso, moltiplicato per la funzione di
trasferimento, o “guadagno”, del circuito.
Poiché con il rumore si opera sempre in regime stazionario, alla variabile s si
sostituisce iω e si lavora con la trasformata di Fourier, anziché quella di
Laplace.
Ciò che nel dominio delle frequenze è un prodotto, nel domino del tempo, cioè
delle anti-trasformate, diventa un integrale di convoluzione:
y (t ) =
+∞
+∞
−∞
−∞
∫ x(t − τ ) h(τ ) dτ = ∫ x(τ ) h(t − τ ) dτ
Ovvero, il segnale d’uscita del circuito è dato dalla convoluzione del segnale
d’ingresso con la risposta all’impulso del circuito.
41
Il calcolo dell’integrale di convoluzione può essere talvolta molto arduo (ma
allora si opera nello spazio delle trasformate, dove diventa un banale prodotto),
però lo si può rappresentare, molto intuitivamente, in maniera grafica.
Fissando le idee sulla prima forma dell’integrale:
+∞
y (t ) =
∫ x(t − τ ) h(τ ) dτ
−∞
lo si può interpretare come l’integrale delle due funzioni (di cui la prima è
l’immagine riflessa del segnale d’ingresso), fatte “scivolare” l’una rispetto
all’altra.
Forse la cosa è più chiara passando dal tempo continuo al tempo discreto e alle
funzioni campionate ad intervalli ∆t.
Allora l’integrale diventa:
y (ti ) = ∑ j x(ti − τ j ) h(τ j ) ∆t
Con questa formula ho fatto un esercizio numerico e cercato di visualizzare
come la convoluzione si costruisce
42
Si ottiene una cosa del genere:
h(tau)
7
x(tau-t)
6
-5,E-06
h(tau)
7
x(tau-t)
6
h(tau)
7
x(tau-t)
6
5
5
5
4
4
4
4
3
3
3
3
2
2
2
2
1
1
1
1
5,E-06
-5,E-06
0
0,E+00
5,E-06
-5,E-06
0
0,E+00
x(tau-t)
6
5
0
0,E+00
h(tau)
7
0
0,E+00
5,E-06
-5,E-06
5,E-06
La convoluzione finale è questa:
70
convoluzione
60
50
40
30
20
10
0
0,0E+00
-10
2,0E-06
4,0E-06
6,0E-06
8,0E-06
1,0E-05
1,2E-05
1,4E-05
1,6E-05
43
Tipi di Rumore
Il rumore esibito dai componenti fisici si descrive mediante tre modelli
fondamentali di rumore:
•
Rumore termico o Johnson; causato dall’agitazione termica dei
portatori nei conduttori
•
Rumore granulare o shot; compare con correnti dovute a pochi
portatori che attraversano in tempi brevissimi una barriera di
potenziale, generando una successione casuale di impulsi di corrente.
•
Rumore 1/f o Flicker; comprende un’ampia gamma di sorgenti di
rumore, spesso di origine poco chiara, che mostrano uno spettro di
tipo 1/fα con α prossimo a 1.
Nei componenti fisici reali vi può essere un tipo di rumore dominante, ma
possono essere anche tutti compresenti.
44
Rumore Johnson
Ai capi di un resistore R in equilibrio termico alla temperatura T compare una
tensione di rumore dovuta al moto casuale degli elettroni di conduzione. Questo
fenomeno fu studiato sperimentalmente da J.B. Johnson nel 1928 (11) e lo
spettro di potenza fu ben presto determinato da H. Nyquist (12).
La resistenza connessa ad un circuito, e con esso in equilibrio termico, a causa
del rumore scambia con esso energia, con una potenza per unità di banda di
frequenza data da:
dP =
hf
hf
kT
df
e −1
Per tutte le frequenze di
interesse in elettronica, questo
spettro è “bianco” cioè
indipendente dalla frequenza.
1. × 10 −21
1. × 10 −22
1. × 10 −23
1. × 10 −24
1. × 10 −25
dP ≈ kT df
kT
per f <<
h
1. × 10 8 1. × 10 9 1. × 10 10 1. × 10 11 1. × 10 12 1. × 10 13 1. × 10 14
dP(f) a T=10, 20, 40, 80, 160, 320 °K
45
Una resistenza reale è allora rappresentata da una resistenza ideale (priva di
rumore) con un generatore di tensione in serie, o un generatore di corrente in
parallelo (teorema di Thevenin-Norton), tali da generare rumore con la stessa
potenza.
en
R
in
R
Lo spettro di potenza dei due generatori vale allora:
Win ( f ) =
4kT
R
[A 2 /Hz]
Wen ( f ) = 4kT R [V 2 /Hz]
Vale la pena di rimarcare che, ricordando come lo spettro di potenza è legato
alla varianza della rispettiva variabile di rumore, le dimensioni di Win sono
A2/Hz e quelle di Wen sono V2/Hz
46
Rumore Shot
Si ha quando la corrente è dovuta a pochi portatori che generano brevi impulsi
con occorrenza casuale.
È un fenomeno importante nella emissione di elettroni da fotocatodi, nelle
valvole termoioniche, nelle correnti di portatori minoritari (correnti di gate nei
JFET e MOSFET, e di base nei BJT).
Viene descritto mediante la statistica di Poisson, con la quale si calcola media e
varianza della corrente:
• Corrente media
(q = carica dell’elettrone
f = frequenza media degli impulsi)
• Varianza della corrente
I= f q
σI2 = I
q
∆t
47
Come intuibile, la varianza della corrente è tanto più piccola quanto è lungo
l’intervallo ∆t di osservazione.
Per calcolare spettro del rumore shot bisogna trovare l’autocorrelazione del
processo che lo descrive e trasformarla secondo Fourier. Trattando gli impulsi di
corrente come delta di Dirac, si ottiene che: (cfr. rif. 10 pag. 350):
Ws ( f ) = 2 Iq [A 2 /Hz ]
È anche questo un rumore bianco, nel limite in cui regge l’approssimazione
degli impulsi come delta di Dirac; quindi fino a frequenze dell’ordine
dell’inverso della durata degli impulsi.
48
Rumore Flicker
Un un’ampia serie di fenomeni, non solo fisici ed elettronici, mostrano
fluttuazioni di ampiezza crescente all’aumentare del tempo di osservazione,
descrivibili come un rumore con uno spettro proporzionale a 1/f,.
Le cause fisiche del rumore 1/f sono spesso oscure; sappiamo che resistori a
carbone mostrano più rumore 1/f rispetto a quelli metallici, e se ne imputa la
causa alle discontinuità di resistività dovuta ai contati più o meno buoni tra i
granuli della pasta resistiva di cui essi sono composti.
Nei dispositivi a semiconduttore il rumore 1/f cresce al crescere dei difetti
reticolari. Di conseguenza, dispositivi a conduzione superficiale (i.e. MOS)
hanno più rumore 1/f dei dispositivi a conduzione di bulk (i.e. BJT e JFET).
Va infine detto che il rumore 1/f è assolutamente presente ovunque.
La trattazione teorica del rumore 1/f è complessa,(13) (14) perché non può
essere considerato un processo stazionario.
La sua varianza diverge verso le basse frequenze; questa “catastrofe” è
evitata perché in realtà nessun circuito ha banda che si estende a frequenza
zero.
49
Dal punto di vista pratico, le prestazioni dei dispositivi sono caratterizzate
dalla frequenza di 1/f noise corner, sopra la quale il rumore 1/f diventa
trascurabile rispetto al rumore bianco.
Nelle applicazioni pratiche si cerca di minimizzare l’effetto del rumore 1/f,
mantenendo le frequenze di interesse sopra il noise corner.
Esso può essere un problema serio per circuiti in continua ad alta sensibilità,
p.es. generatori di tensioni di riferimento, che notoriamente sono soggetti a
lente pendolazioni e richiedono periodiche calibrazioni.
Nei nostri circuiti, osservata l’avvertenza di stare sopra il noise corner,
solitamente il rumore 1/f è trascurato.
Slope = -1/2
LMV793 MOS input OpAmp
equivalent input noise voltage
LMP7731 Bipolar input OpAmp
equivalent input noise voltage
50
Rappresentazione del rumore nelle reti
Un generico sistema elettronico lineare viene rappresentato come un doppio
bipolo. In esso ci sono molteplici sorgenti di rumore, ciascuna produce rumore in
uscita secondo la sua funzione di trasferimento. Il rumore in uscita può essere
riportato in ingresso mediante la funzione di trasferimento del bipolo. Poiché il
bipolo è descritto da un sistema lineare nelle tensioni e correnti d’ingresso e
d’uscita:
Vo = h11Vi + h12 I i
I o = h21Vi + h22 I i
Io
Ii
Vi
allora tutto il rumore del sistema può essere
riportato in ingresso mediante due generatori,
uno di tensione in serie, detto anche rumore
serie, ed uno di corrente in parallelo, detto
rumore parallelo. Tutto il rumore è quindi
espresso dallo spettro delle due sorgenti (ed
eventualmente dalla mutua correlazione)(3).
doppio bipolo
en
in
Vo
doppio bipolo
privo di rumore
I datasheets dei componenti esprimono il rumore con la radice quadrata dei
relativi spettri. Quindi danno il valore dei due generatori con le dimensioni:
[en]=V/√Hz [in]=A/ √Hz
51
Relazione tra spettro di rumore, e noise figure
Un altro parametro spesso usato per quantificare il rumore, soprattutto di
amplificatori e grandi sistemi, è la noise figure, che esprime il rapporto tra
rumore rms in uscita al sistema e quello dovuto alla sola sorgente, espresso in
decibell:
2
n
NF = 10 log o 2
( ns H )
i
o
H
ns
Nel rumore in uscita separiamo la parte dovuta al sistema
da quello dovuto alla sorgente (i due rumori sono
statisticamente indipendenti, quindi i loro rms si sommano
quadraticamente):
nH
2
no = (ns H ) 2 + nH
(
2
)
Osservando che nH/H è il rumore del sistema riportato in
ingresso, nHi:
nHi = ns 10 10 − 1
In termini di spettro, e considerando che il rumore della
sorgente è dovuto tipicamente ad una resistenza Rs:
WHi = 4k T 10 10 − 1 Rs
2
2
[(
La quantità T(10NF/10-1) è detta temperatura equivalente di rumore, ed
esprime la temperatura a cui dovrebbe trovarsi la sorgente per rendere
conto del rumore del sistema.
NF
)]
NF
52
Rumore nei componenti elettronici
Rumore nei componenti passivi
Del rumore generato da resistenze si è già detto.
A rigori, andrebbe aggiunto la componente 1/f, che dipende dalle particolarità
costruttive delle resistenza
en
Win ( f ) =
4kT
R
R
in
R
Wen ( f ) = 4kT R
Forse non è inutile dire che condensatori e induttanze (trascurando loro
resistenze parassite) non generano rumore.
53
Rumore nel BJT
Ci sono molteplici sorgenti di rumore
nel BJT: il rumore shot dei portatori
minoritari, il rumore termico delle
resistenze diffuse, il rumore di
generazione e ricombinazione, il rumore
1/f…
Il modello che presento non tiene conto
di tutto, ma è sufficiente in tutte le
situazioni pratiche (senza ricorrere a
tecniche computazionali), e soprattutto
non richiede conoscenze di parametri
“esotici” dei dispositivi .
54
Secondo questo modello le sorgenti di rumore nel BJT sono:
•
Shot noise delle corrente di base. Essa infatti è dovuta ai
portatori iniettati dell’emettitore, che nel volume della base
sono portatori minoritari
•
Johnson noise della resistenza diffusa di base. A causa del suo
ridotto spessore, la base presenta una resistenza non
trascurabile (≈10-100Ω), che genera rumore termico.
Spesso viene trascurato.
•
Shot noise delle corrente di collettore. Essa è dovuta ai
portatori iniettati dall’emettitore, che attraversano la base e
giungono nel volume depleto della giunzione base-collettore.
Sono quindi portatori minoritari.
Questo rumore viene riportato in ingresso, mediato dalla
transconduttanza del transisor.
55
Disegnando il transistor come un doppio bipolo con
funzione di trasferimento gm (che vale a bassa
frequenza, ma assumiamo di usare il transistor ben
sotto la sua ft):
gm ≈ Ic
Ic
q
≈
kT 25 mV
io
vi
vn
a T = 300° K
in
allora lo spettro del rumore serie e parallelo
valgono, rispettivamente:
2 Ic q
2kT
Wen =
+ (4kTRbb ) =
+ (4kTRbb )
2
g
gm
m
Win = 2 I b q = 2
Ic
β
q
Dove Rbb è la resistenza diffusa di base.
Si usa rappresentare gli spettri di rumore bianco in termini di resistenza
equivalente di rumore, definita come la resistenza che genera lo stesso
spettro di rumore.
Allora le resistenze di rumore equivalenti del BJT per il rumore serie e
parallelo valgono, rispettivamente:
Wen 0,5
Rns ≡
=
+ (Rbb )
4kT g m
Rnp ≡
4kT 2β
=
Win g m
56
Rumore nel JFET
Il JFET è un dispositivo il cui la
conduzione di corrente avviene
nello spessore del
semiconduttore (bulk), in un
canale la cui sezione viene
“strozzata” dalla zona di
svuotamento della giunzione
inversa del gate.
La corrente di drain è quindi dovuta ai portatori maggioritari ed è affetta
da rumore termico. Anche in questo caso il rumore della corrente di drain
viene riportato in ingresso mediato dalla transconduttanza del transistor.
La corrente di gate invece è affetta da shot noise, essendo la corrente di
una giunzione polarizzata inversamente. Andrebbe anche considerato un
contributo dovuto all’accoppiamento capacitativo tra in canale ed il gate,
che riporta sul gate un po’ del rumore della corrente nel canale.
57
Si dimostra che per il JFET lo spettro del
rumore serie e la resistenza equivalente di
rumore serie valgono:
Wen ≈ 0,7
4kT
gm
Rns =
0,7
gm
io
vi
vn
in
E lo spettro di rumore parallelo vale:
4kT 2
Win = 2 I G q + 0.2
ω CGS 2
gm
Il confronto con il BJT ci dice che:
•
Il rumore serie è confrontabile (ma nel BJT è molto più facile ottenere
un’alta gm)
•
Il rumore parallelo è molto più alto nel BJT
58
Rumore nel MOSFET
Il MOSFET ha un modello circuitale molto
simile a quello del JFET, ed anche le sorgenti
di rumore sono molto simili.
Ma ci sono non trascurabili differenze.
MOSFET a confronto con il JFET :
•
La transconduttanza gm è più alta nel MOS, a parità di corrente di
drain; quindi minor rumore serie.
•
Correnti di gate più basse nel MOS; quindi minor rumore parallelo.
•
Rumore 1/f più alto nel MOS, perché la conduzione di corrente avviene
sulla superficie del silicio, subito sotto l’ossido di gate, dove i difetti
reticolari sono più densi.
59
Il bilancio dei pro e dei contro e la scelta finale dipendono dalle applicazioni:
•
In amplificatori realizzati a componenti discreti il MOS è svantaggiato
dal rumore 1/f e dal fatto che le protezioni sul gate vanificano il minor
rumore parallelo.
•
In amplificatori integrati il MOS è avvantaggiato dal fatto che la
tecnologia d’integrazione dei MOS è più semplice.
•
Il trend tecnologico da un lato porta ad una riduzione del rumore 1/f
nei MOS, dall’altro va verso amplificatori a sempre più alta frequenza,
dove il rumore 1/f pesa poco.
•
In amplificatori a tempo di formatura lunga (p.es. per spettroscopia
nucleare, tipicamente a componenti discreti) il dispositivo d’elezione
resta il JFET
•
Negli amplificatori integrati su larga scala per gli esperimenti HEP il
MOS è l’unica scelta praticamente possibile.
60
Rumore dei vari dispositivi a confronto.
• La risalita a tempi piccoli è dovuta al
rumore serie
• La risalita a tempi grandi è dovuta al
rumore parallelo
• Il rumore 1/f è indipendente dal
tempo di formatura
61
Rumore nell’Amplificatore Operazionale
Generalizzando la rappresentazione del rumore nei
doppi bipoli, e dopo aver visto come si rappresenta
il rumore nei transistor, la rappresentazione più
immediata del rumore nell’AmpOp è data mediante
una coppia, per ciascun ingresso, di generatori di
rumore serie e parallelo.
enen+
in- in+
I generatori di corrente rappresentano essenzialmente il rumore (shot) delle
correnti di bias. I generatori di tensione rappresentano essenzialmente il
rumore (termico e/o shot) delle correnti di drain/collettore del dispositivo
d’ingresso . Le coppie di generatori di tensione e di corrente sono, in prime
approssimazione, identici e statisticamente indipendenti.
I due generatori di tensione sono connessi agli ingressi dell’OpAmp, che sono
equipotenziali; possono quindi essere “fusi” in un unico generatore con spettro
dato dalla somma dei due.
62
Questo è il modello usato dai costruttori per
rappresentare il rumore di un OpAmp, con un unico
generatore di rumore serie, a cui contribuiscono
entrambi gli ingressi. Ovvero en è √2 volte il rumore
serie del singolo ingresso
en
in- in+
Spettri del rumore serie e parallelo dell’OpAmp LMP7731
63
Formazione del segnale nel
rivelatore
Il segnale elettrico fornito dai rivelatori elettronici è una certa quantità di
carica rilasciata in un tempo solitamente molto breve.
Un esempio semplice
Nel situazione più semplice possiamo
immaginare il rivelatore come un condensatore
piano carico, nel cui volume una particella
ionizzante generi una coppia elettrone/ione. Le
cariche migrano nel volume del rivelatore,
sotto l’azione del campo elettrico, e generano
sul circuito esterno una corrente I(t) che
trasporta una carica e.
Le due cariche generano corrente finché non
raggiungono gli elettrodi. L’elettrone, che si
muove velocemente, genera una corrente alta
per un tempo breve; lo ione positivo, più lento,
genera una corrente più bassa e più lunga.
-e +e
I(t)
I
Corrente da eCorrente da e+
t
64
La forma del segnale
Teorema di Shockley-Ramo
La descrizione analitica generale della corrente indotta da una carica in
movimento sui conduttori circostanti è formulata dal teorema di
Shockley-Ramo;
W. Shockley, J. Appl. Phys. 9 (1938) 635 - S. Ramo, Proc. IRE 27 (1939) 584
r r
I i = qv ⋅ Eni
Ii
v
Eni
è la corrente indotta dalla carica q sul conduttore i;
è la velocità della carica, determinata dal campo totale sentito dalla
carica;
è il campo “normalizzato” sentito dalla carica (cioè, applicando un
potenziale unitario al conduttore i, e nullo agli altri conduttori).
La soluzione generale di questa equazione, in presenza di molti conduttori,
non può che venire affrontata con simulazioni numeriche.
Dal punto di vista dell’elettronica di front end interessa solo trovare la
corrente sull’elettrodo di lettura.
65
Soluzioni particolari
del teorema di Shockley-Ramo
Condensatore piano e cariche con velocità saturata
È un buon modello di rivelatori con elettrodi piani a ionizzazione di liquido o gas
(nei gas la condizione di velocità satura può essere violata – cfr rif. 2 pag. 22 ss).
v = µE
la velocità della carica è proporzionale al
campo elettrico (gli urti con gli atomi del
mezzo “saturano” la velocità);
En = 1/d
è il campo ottenuto applicando una differenza
di potenziale unitaria agli elettrodi (l’indice i
scompare perché c’è una sola corrente da
calcolare).
-e +e
x
carica dell’elettrone/ione;
E
q = ±e
d
Assumiamo di avere una coppia elettrone/ione creata a
distanza x dall’elettrodo di riferimento. Sia d la distanza
tra gli elettrodi. Nell’equazione di Shockley-Ramo vanno
quindi messe le quantità (con i corretti segni):
66
Le correnti create dal movimento delle due cariche
valgono quindi:
1 eµ + E
I = qv ⋅ En = +e( µ E ) =
d
d
x
1 eµ − E
I = qv ⋅ E n = − e ( − µ E ) =
d
d
−
-e +e
d
+
E
+
−
La durata delle due correnti è rispettivamente:
x
t = +
µ E
+
s
d−x
t = −
µ E
−
s
I
−
eµ E
d
e
d−x
d
Corrente da ee
eµ + E
d
Poiché µ->> µ+ allora ts-<<ts+
(per dare un’idea, nell’argon liquido µ-/µ+ ≈1000)
x
d
Corrente da e+
t
d−x
µ −E
x
µ+E
La carica totale trasportata dalle due correnti vale:
eµ + E x
eµ − E d − x
x d −x
q = ∫ ( I + I )dt =
+
=
e
+
=e
+
−
d µ E
d µ E
d
d
+
−
67
Una particella ionizzante che attraversi tutto lo spessore del rivelatore, crea
n coppie lungo tutto il percorso, che arrivando progressivamente agli
elettrodi, generano due impulsi di corrente di forma triangolare, alto e corto
gli elettroni, basso e lungo gli ioni.
Ciascun impulso porta metà della carica totale, tuttavia, a causa del lungo
tempo di raccolta, di solito il contributo degli ioni positivi è trascurato.
I
neµ −
E
d
Corrente da elettroni
1
2
ne
Corrente da ioni
neµ +
E
d
1 d
µ− E
1 d
µ+ E
t
68
Rivelatore proporzionale a geometria cilindrica
(camera a fili)
Nelle camere a fili il campo elettrico raggiunge intensità sufficienti a
generare moltiplicazione della carica nelle immediate vicinanze del filo.
Gli elettroni vengono rapidamente raccolti dal filo, e danno un
contributo modesto al segnale totale (tanto più piccolo quanto più è
sottile il filo), mentre il grosso del segnale è dovuto agli ioni che si
allontanano dal filo. Appare quindi come un impulso inizialmente molto
ampio, seguito da una lunga, debole coda. (cfr rif. 2 pag. 44 ss)
Forma del segnale calcolata per contatore proporzionale a geometria
cilindrica (tratto da rif. 8)
69
Rivelatori a silicio
Sono essenzialmente una giunzione PN polarizzata inversamente e con un esteso
volume svuotato da portatori liberi.
Possono allora essere rappresentati come un condensatore piano con una
distribuzione spaziale di carica che altera l’uniformità del campo.
La distribuzione di carica, e quindi la forma dell’impulso generato da una
particella ionizzante, dipende dal profilo di drogaggio e dal potenziale di
polarizzazione, rendendo possibili una varietà di forme del segnale.
È significativo che, avendo gli elettroni e le hole mobilità comparabili,
contribuiscono entrambi al segnale.
Segnale generato da traccia passante in silicon pad
detector, under-depleted (sin) e over-depleted (dx)
Tratto da rif. 9
70
Tratto da rif. 6
Blocchi funzionali
di una catena analogica.
In una catena completa di processamento analogico dei segnali da rivelatori
possiamo individuare a grandi linee tre blocchi funzionali.
Cf
Detector
Rf
Shaper
A
Q(t)
Cd
Rd
Charge
Preamp
Signal Precessing
Sampling
ADC
Hf
DAQ
trigger
Data Acquisition
71
Detector
Il detector è rappresentato con il suo circuito
equivalente (può variare nei dettagli; dipende
dalla configurazione), composto essenzialmente
da:
• generatore di corrente che eroga un impulso
di corrente Q(t). Solitamente si assume che
abbia durata nulla, o comunque molto più
breve della risposta all’impulso della catena
analogica, per cui può essere assimilato ad
una delta di Dirac:
Q(t) = Q δ(t)
Detector
A
Q(t)
Cd
Charge
Preamp
Rd
Sign
• capacità Cd che è principalmente la capacità del rivelatore, ma include
ogni capacità parassita (capacità del dispositivo d’ingresso, di
interconnessioni …). La minimizzazione delle capacità parassite e delle
interferenze è la ragione per cui il preamplificatore è posto
immediatamente vicino al rivelatore.
• resistenza Rd che è principalmente la resistenza di polarizzazione del
rivelatore, ed include ogni resistenza parassita (perdite delle
interconnessioni e del rivelatore stesso…)
72
Accoppiamento in DC o AC
Il rivelatore può essere connesso all’amplificatore in continua o
mediante un condensatore di isolamento. Il circuito equivalente
varia nei due casi, ma si assume che i condensatori di blocco e di
isolamento siano tanto grandi da rendere trascurabili le loro
impedenze.
Ci sono pro e contro per entrambe le configurazioni. La scelta è
un compromesso tra diverse esigenze; è più frequente
l’accoppiamento AC.
• Nell’accoppiamento in DC l’amplificatore vede anche
l’eventuale corrente di perdita del rivelatore, cosa talvolta
utile, ma porta uno spostamento in continua del livello di base
dell’uscita.
Vb
Rb
Cb
all'amp
Accoppiamento
in DC
Vb
Rb
Cb
all'amp
• L’accoppiamento in AC elimina la corrente di perdita del
rivelatore e, può introdurre un taglio utile ad attenuare il
rumore a bassa frequenza (1/f, microfonicità, interferenze…).
Per contro, impedisce una formatura esattamente unipolare,
con errore tanto più grande quanto è piccolo il condensatore.
• Può essere difficile trovare condensatori da alta tensione di
elevato valore (e magari anche piccoli).
Accoppiamento
in AC
73
Preamplificatore (amplificatore di carica)
È il componente più critico dell’intera catena; da esso dipendono
in maniere cruciale le prestazioni al rumore del sistema.
Cf
Rf
È costituito da un amplificatore di tensione con alta impedenza
d’ingresso e alto guadagno invertente, con reazione capacitiva, in
modo da realizzare un integratore. Nella reazione compare una
resistenza, per fornire la tensione di polarizzazione all’ingresso,
ma il suo contributo deve essere trascurabile.
A
Charge
Preamp
Signal Precessing
Funzioni fondamentali:
1. Massimizzare la raccolta di carica.
Efficienza di raccolta:
AC f
AC f + Cd
A
Cd
≈1
Rd
ACf
Rf /A
se ACf>>Cd.
2. Ottimizzare le prestazioni rispetto al rumore.
3. Fornire il primo stadio di signal shaping.
4. Fornire un adattamento di impedenza (raro).
Il preamplificatore è tagliato su misura per ogni rivelatore
74
Disegno di un amplificatore di carica
La “configurazione operazionale” che forma il nucleo dell’amplificatore di
carica deve avere queste caratteristiche:
1. Alto guadagno invertente ad anello aperto
2. Alta impedenza d’ingresso;
3. Alto prodotto guadagno-banda;
4. Basso rumore;
5. Dispositivo d’ingresso “adattato” al rivelatore.
Non è invece necessario che abbia ingresso differenziale, anzi è controindicato
dai punti 3 (l’ingresso non invertente contribuisce comunque al rumore) e 4 .
Non sarà quindi un amplificatore operazionale commerciale. Il punto 2, per
quanto visto a proposito dell’impedenza d’ingresso di un operazionale con
reazione R||C, porta a dire che il polo dominante dell’amplificatore deve essere
maggiore del polo dell’impedenza (ω0>>ωf).
Tutto ciò porta a concludere che un operazionale commerciale è poco indicato
per realizzare un amplificatore di carica.
75
Un amplificatore a componenti discreti con ingresso JFET
L’amplificatore qui presentato, nonostante la semplicità, mostra eccellenti
prestazioni per costruire un amplificatore di carica. È uno schema derivato,
con qualche modifica, dal classico schema di Radeka.
Aol ≈ -1000 ÷ -8000 @ Rl=0,4 ÷ 5 kΩ, Cl=50 pF
GBW ≈ 400 MHz (simulati)
Power ≈ 23 mW
Q1=BF851A
Q2 ÷ Q5 = HFA3096
Nota: l’amplificatore è disegnato senza
feedback. È chiaro che il gate d’ingresso ha
bisogno di una tensione di polarizzazione, che
sarà prelevata dall’uscita mediante una
resistenza di alto valore. L’uscita quindi avrà un
offset pari alla tensione Vgs del JFET.
76
Il segnale di tensione Vin sul gate
induce un segnale di corrente
id=gmVin sul drain, che viene
catturata (quasi) integralmente dal
folded cascode
id
vin
Folded cascode
77
La corrente id viene convertita
in tensione sul carico attivo,
costituito da una resistenza
“bootstrapped”.
Il generatore di corrente
fornisce le correnti di
polarizzazione senza caricare
l’uscita.
id
Il guadagno totale è dato da
gmZo dove Zo è l’impedenza
vista sul collettore di Q2
Carico attivo
Generatore di
corrente
78
Lo stadio d’uscita è costituito da
un emitter follower con un
booster di corrente che ne
abbassa ulteriormente
l’impedenza d’uscita.
La correte su carico si ripartisce
su Q3 e Q4 in proporzione
inversa al rapporto delle
resistenze di collettore, su Q4, e
di emettitore, su Q3.
booster
Emitter follower
79
Il risultato è un amplificatore con un’ottima risposta in frequenza, seppure
alquanto sensibile al carico.
Rl=5 kΩ
Rl=400 Ω
ωo≈1 MHz
GBW=400 MHz
80
Un amplificatore integrato MOSFET
Questo invece è l’amplificatore in tecnologia MOS, integrato nel chip
HELIX, usato nel read out del microvertice di ZEUS
Resistenze variabili
cascode
Level shifter
Il MOS d’ingresso ha piccola “gate length” (⇒ alta risposta in frequenza) e
grande “gate width” (⇒ grande gm). Non ha buffer d’uscita perché è usato con
81
un carico ben definito, che partecipa alla definizione del guadagno.
Filtro o Shaper.
Subito dopo il preamplificatore di carica viene il cosiddetto “shaper” che
svolge le seguenti funzioni fondamentali:
1. Filtrare il segnale in modo da ottimizzare il rapporto
segnale/rumore (teoria del filtro ottimo).
2. Dare al segnale una forma adeguata alle successive elaborazioni:
la carica è misurata dal valore di picco della forma d’onda,
il tempo dall’istante di occorrenza del picco.
Nel caso di soluzione a componenti discreti esso si trova, in tutto o in
parte, lontano dal rivelatore, per minimizzare la dissipazione di potenza
dentro il rivelatore. Il che comporta lo sviluppo di componenti dedicate
alla trasmissione (line driver).
Nel caso di soluzione integrata, solitamente il chip di front end alloggia
tutta la catena fino alla digitalizzazione.
82
Teoria del filtro ottimo
Per trovare qual è il filtro con il quale si ottiene il migliore rapporto
segnale/rumore, bisogna tornare a guardare l’intero sistema, compreso il
rivelatore (rappresentato dalla sua impedenza equivalente, Zd).
Il filtro che segue il preamplificatore è rappresentato dalla sua funzione di
trasferimento Hf(s), di modo che la funzione di trasferimento dell’intera
catena è H(s)=-Zf(s)·Hf(s)
Si dimostra che esiste una forma di H(s) che permette la misura del segnale
d’ingresso con il migliore rapporto segnale/rumore.
Cercheremo poi le migliori realizzazioni pratiche del filtro ottimo, che concilino
semplicità costruttiva con buone prestazioni, anche nei confronti di altre cause
di perdita di risoluzione, diverse dal rumore casuale.
83
Spettro di rumore in ingresso
Usando un principio già enunciato, tutto il rumore del sistema è rappresentato
dai due generatori di rumore serie e parallelo, e ricordando che pesano di più i
generatori di rumore vicini alla sorgente, con buona approssimazione tutto il
rumore può essere ricondotto a pochissimi elementi.
In questa rappresentazione si ha:
Rumore parallelo in dovuto a:
• Rumore termico di Rd
• Rumore termico di Rf
• Rumore shot della corrente di
leackage del detector
• Rumore shot del dispositivo
d’ingresso dell’amplificatore
• Rumore 1/f
Zf
en
Zd
A
Hf (s)
in
Rumore serie en dovuto a:
• Rumore riportato in ingresso dei primi dispositivi dell’amplificatore
(transistor d’ingresso, resistenza di drain, cascode…)
• Rumore 1/f
84
Rappresentando globalmente la componente bianca del rumore parallelo
mediante la resistenza di rumore equivalente, lo spettro del rumore parallelo
vale:
4kT
4kT 2 2 f p
in (ω ) =
+ 0,2
Ci ω +
Rp
gm
ω
2
Il termine tra parentesi esiste nel caso che il dispositivo d’ingresso sia un
JFET o un MOS (molti autori lo trascurano comunque).
Analogamente, il rumore serie si può scrivere:
2
en (ω ) = 4kTRs +
fs
ω
Zf
Per portare in uscita il rumore bisogna
trovare le funzioni di trasferimento
del circuito rispetto ai due generatori,
che sono:
vo
= −Z f ⋅ H f
in
vo Z f + Z d
=
⋅Hf
en
Zd
en
Zd
A
Hf (s)
in
85
Spettro di rumore in uscita al filtro
Lo spettro di rumore in uscita viene determinato mediante la relazione
fondamentale:
Wo ( f ) = Wi ( f ) H (iω )
2
La applichiamo a ciascuna delle due sorgenti e sommiamo i contributi:
2
Wo ( f ) = in Z f
2
2
H f + en
2
Z f + Zd
Zd
2
2
Hf
2
2
2
= in H + en
2
1
1
+
Z f Zd
H
2
Osservando che è:
2
1
1
+
Z f Zd
=
1
2 2
(
)
+
Cf
+
Cd
ω
2
(R f || Rd )
(Rf||Rd indica il parallelo di Rf e di Rd)
86
E inserendo le precedenti espressioni degli spettri d’ingresso, lo spettro
d’uscita diviene:
4kT
Wo ( f ) =
Rp
R p Rs
1 +
H
2
(R || R )
f
d
2
2
0,2 Ci 2 2
2
+ 4kT Rs (Cd + C f ) +
ω H
Rs g m
1
fs
H 2 + f s (Cd + C f )2 ω H
+ fp +
2
(
)
R
||
R
f
d
ω
rumore parallelo
rumore serie
2
rumore 1/f
Conviene introdurre qualche approssimazione:
• RpRs << (Rf||Rd)2
• Cf << Cd
• Trascuriamo tutto il rumore 1/f, assumendo che il filtro abbia un
adeguato taglio in bassa frequenza.
87
Con queste approssimazioni, lo spettro d’uscita diviene:
4kT
2 0,2 Ci 2 2
ω H
+ 4kT Rs Cd +
Wo ( f ) =
Rs g m
R p
2
La quantità tra parentesi quadre è chiaramente lo spettro del rumore totale
riportato in ingresso come sorgente parallela, e può essere scritto come:
(
4kT
2
Wi ( f ) =
1+τ c ω 2
Rp
)
2 0,2 Ci 2
τ c = R p Rs Cd +
Rs g m
con
La quantità τc è detta “noise corner time constant”
Ora bisogna ricordare una formula presentata nelle teoria del rumore, e un
paio di proprietà della trasformata di Fourier:
∞
σ n = ∫ W ( f ) df
2
0
1
2π
+∞
∫
−∞
+∞
2
H (iω ) dω =
∫
−∞
2
h(t ) dt
1
2π
+∞
+∞
2
dh(t )
2
ω
H
(
i
ω
)
d
ω
=
∫−∞
∫−∞ dt dt
2
88
Da cui si ottiene che la varianza del rumore in uscita vale:
σ no2
2kT
=
Rp
2
∞
0
,
2
C
2
2
i
& 2 (t ) dt
h
(
t
)
dt
+
2
kT
R
C
+
h
s
d
∫−∞
R g ∫
s m −∞
∞
Quindi la varianza del rumore in uscita dipende dalla forma, nel dominio del
tempo, della risposta all’impulso del filtro.
Poiché Q·h(t) è la risposta del sistema all’impulso di carica in ingresso Q ·δ(t),
misurando la risposta all’instante tM in cui il segnale ha la massima ampiezza,
sarà possibile determinare Q con la migliore precisione.
Si definisce rapporto segnale/rumore la quantità:
Q ⋅ h(t M )
σ no
Ovvero il rapporto tra il segnale d’uscita, misurato al picco, e il valore rms del
rumore in uscita.
89
ENC
Si definisce Equivalent Noise Charge (ENC) la carica in ingresso che fornisce
un segnale pari a σno, ovvero la carica per la quale si ha un rapporto
segnale/rumore pari ad 1.
Quindi :
ENC =
σ no
h(t M )
L’ENC è il parametro fondamentale per esprimere la qualità, rispetto al
rumore, di una catena di amplificazione (ed è determinato quasi
esclusivamente dal preamplificatore di carica).
Se definiamo hn(t)=h(t)/h(tM) [cioè la normalizziamo ad altezza unitaria] si
può scrivere:
2kT
ENC =
Rp
2
2 0,2 Ci 2 ∞ 2
& (t ) dt
h
(
t
)
dt
+
2
kT
R
C
+
h
n
s
d
∫−∞
R g ∫ n
s m −∞
∞
2
La ricerca del filtro ottimo si basa sulla minimizzazione dell’ENC al variare
della hn(t) .
90
Filtro ottimo
Nelle ipotesi usate (segnale d’ingresso impulsivo, rumore bianco), si dimostra
che il filtro ottimo è descritto dalla forma:
hn (t )
t
hn (t ) = e
−τ
c
Ma un filtro con questa
caratteristica è
concettualmente impossibile da
realizzare … (è definito da t=-∞,
conseguenza dell’aver usato la
trasformata di Fourier).
h&n (t )
91
Tuttavia l’ENC del il filtro ottimo costituisce il termine di paragone per tutti i
filtri realizzabili:
ENCopt =
4kT
τc
Rp
Per i filtri realizzabili si definisce
un fattore di merito, dato dal
rapporto dell’ENC con quello del
filtro ottimo:
F=
ENC
ENCopt
92
Altre cause di perdita di risoluzione
Oltre al rumore casuale, ci sono altre cause che provocano perdita di
risoluzione nella misura del segnale, e che condizionano la scelta del filtro.
• Deficit balistico.
Compare quando la durata dell’impulso d’ingresso è
non trascurabile e variabile. Si compensa con una
h(t) a sommità piatta di durata superiore alla
massima (ragionevole) durata dell’impulso
d’ingresso. Dall’integrale di convoluzione si vede che
con questa forma la risposta ha ampiezza di picco
indipendente dalla durata dell’impulso d’ingresso.
• Pile-up.
Compare quando la frequenza degli impulsi
d’ingresso è tale da provocare sovrapposizione delle
risposte. Si minimizza richiedendo una h(t) più
corta del periodo medio tra gli impulsi d’ingresso,
con rapido ritorno a zero. Nei rivelatori asincroni la
probabilità di pile-up non può essere mai eliminata
del tutto.
93
• Rumore a bassa frequenza
(microfonicità, rumore 1/f …). Si riduce
introducendo un taglio a bassa frequenza.
Un taglio a frequenza molto bassa
(i.e. accoppiamento in AC) produce perdita
di risoluzione per baseline shift.
Un taglio a frequenza meno bassa produce
una formatura bipolare, che ha scarso
fattore di merito, scarse prestazioni verso
il deficit balistico e il pile-up, ma può essere
l’estrema ratio contro rumore a (non tanto)
bassa frequenza.
• Rumore d’interferenza e di massa.
Bisogna curare shielding, grounding e layout
circuitale. In linea di principio non ha
influssi sulla scelta del filtro.
94
Filtri reali
Esiste un’incredibile varietà di soluzioni per realizzare filtri, alla ricerca del
miglior compromesso tra le diverse esigenze.
In tutti si verifica che gli integrali nell’espressione dell’ENC assumano la forma:
∞
∫ hn (t ) dt = tM K p
2
−∞
∞
& 2 (t ) dt = K s
h
∫−∞ n
tM
L’ENC dei filtri diventa allora:
2
2
kT
0
,
2
C
2
2
i Ks
ENC =
t M K p + 2kT Rs Cd +
t
Rp
R
g
s m M
Dove Kp e Ks dipendono solo dalla “forma” di h(t), normalizzata in altezza e
durata, e sono dei parametri specifici di ciascun filtro. Il tempo di picco viene
detto shaping time
95
Dato un particolare filtro, con definite Kp e Ks il rumore (ENC) ora dipendono
solo dallo shaping time, ed esiste un valore che lo minimizza.
96
Una veloce panoramica …
97
Una nota sul nome di filtri molto comuni
I più comuni filtri “time invariant” (cioè, che non usano curcuiti commutati o
linee di ritardo) vengono indicati con denominazioni del tipo “CR-RC” o
“CR-(RC)4” ecc …
Queste denominazioni derivano da una rappresentazione equivalente un po’
datata e, a mio avviso, fuorviante.
Ad esempio, la forma normalizzata del così detto filtro CR-RC è
e −τ
τ −1
e
C1
ed è la risposta di un filtro a due poli reali
coincidenti, che non contiene alcun circuito
CR (infatti è perfettamente unipolare).
R1
A
C2
R2
R1C1=R2C2
A
98
Cancellazione polo-zero
Questo è un circuito che si incontra frequentemente nel disegno dei filtri per
elettronica di front end.
Supponiamo (come spesso è) che la τf del
preamplificatore sua molto maggiore dello
shaping time desiderato, con un circuito così
si può “cancellare” il polo del preamp e
portare il filtro alla forma voluta.
La funzione di trasferimento del circuito è:
Cf
C2
Rf
R2
C1
ii
A
R3
vo
R1
A
Charge
Preamp
Rf
R2
1 + sτ f 1 + sτ 2
R f R2
vo
Z2
1 + sτ 1
= Zf
=
=
ii
Z 3 ( R1 + R3 )(1 + sR1 || R3C1 ) R1 + R3 (1 + sτ f )(1 + sτ 2 )(1 + sR1 || R3C1 )
1 + sτ 1
È una funzione che ha uno zero e tre poli. Se lo zero in 1/R1C1 viene fatto
coincidere con il polo in 1/RfCf, e gli altri due poli vengo posto allo stesso
valore, la funzione si semplifica in:
R f R2
vo
1
=
ii R1 + R3 (1 + sτ ) 2
99
Che realizza un filtro a due poli reali coincidenti, con risposta:
hn (τ )
t −τ
e
h(t ) =
( R1 + R3 )τ τ
1
0.8
t
R f R2
0.6
0.4
0.2
1
2
3
4
5
Bisogna prestare attenzione che in uscita al preamp si può avere un notevole
pile-up; quindi il preamp deve avere adeguato range dinamico .
Cf
C2
Rf
R2
C1
ii
A
R3
R1
A
vo
Charge
Preamp
100
Filtri semigaussiani
Tra le curve analitiche che meglio approssimano la cuspide del filtro ottimo
c’è la gaussiana, che però è anch’essa irrealizzabile, essendo definita da t=-∞.
La si può approssimare, con approssimazione crescente al numero di poli, con
filtri a molti poli reali coincidenti (cfr. esempi a pag. 97), e ancor meglio (per
fattore di merito del filtro e minor uso di elettronica), con filtri a poli
complessi coniugati, per i quali si dimostra che esiste una disposizione
ottimale dei poli(5).
Il “bulding block” di base per questi filtri è il passa
basso attivo del secondo ordine, che con un solo OpAmp
realizza una coppia di poli complessi coniugati.
A
Non si trovano molto frequentemente, perché difficili
da analizzare, ma sono molto efficienti. Il fattore di
merito è attorno a 1,20-1,15 e decresce molto
lentamente all’aumentare del numero di poli.
101
Uno shaper semigaussiano commerciale
E’ uno shaper semigaussiano a 2 coppie di
poli complessi coniugati.
Molto versatile, è ampiamente usato in
spettroscopia nucleare.
La funzione di trasferimento non è fornita
dal costruttore, ma con un po’ di ingegno …
Uscita dello shaper campionata
a 10 MHz e interpolata con la f(t)
102
Uno shaper “semigaussiano” integrato
E’ lo shaper del chip HELIX. Realizza una formatura “semigaussiana” a un
polo reale (dovuto al preamp) e due poli complessi coniugati, con
accoppiamento in AC.
Funzione di trasferimento e risposta
all’impulso sono dati da:
H (s) =
K
( s + p )[(s + β ) 2 + α 2 ]
h(t ) = Ae − tp − Ae −tβ cos tα + Betβ sin tα
In questo caso il progettista, per
minimizzare i componenti ha “giocato”
con i poli interni degli amplificatori.
103
I parametri della h(t) non sono noti con esattezza; sono stati determinati
con tecniche di minimizzazione dall’interpolazione della risposta
Le prestazioni al rumore del chip HELIX
•ENC(e-) ≈ 430 + 35*Cd(pF)
•ENC(20pF) ≈ 1200 e•S/N ≈ 20 (1 MIP = 24000 e-)
104
Adattamento ottimale con rivelatori ad alta
capacità
Quando il rivelatore ha alta capacità, il contributo dominante all’ENC è dato
dal rumore serie:
2 0,2 Ci 2 Ks
ENC s = 2kT Rs Cd +
Rs g m t M
2
Si dovrà quindi lavorare con tempi di formatura lunghi (il che esclude l’uso di
BJT) e cercare di massimizzare la trasconduttanza gm.
Per un preamplificatore integrato, significa fare il MOS d’ingresso molto
grande. Per un preamplificatore a discreti con JFET si può ottenere lo
stesso risultato mettendo molti dispositivi in parallelo. Tuttavia, poiché
aumentando la transconduttanza si aumenta anche la capacità d’ingresso del
dispositivo, ci sarà un valore limite a cui si ottiene il minimo ENC.
105
Per determinare le condizioni di ENC minimo osserviamo che:
gm
= ωt
Ci
ωt è la “pulsazione di taglio” del dispositivo.
È un parametro del processo di produzione.
Per i migliori JFET è circa 5·109 s-1
C d → C d + Ci
Cd include tutte le capacità connesse in ingresso;
ora assumo che ci sia solo il rivelatore ed il dispositivo
d’ingresso (trascuro le interconnessioni)
1
Rs ≈
gm
La resistenza di rumore serie per un JFET o MOS è
circa 0,7/gm. Assumo Rs≈1/gm per tener conto
approssimativamente anche degli altri contributi.
L’ENC diventa allora:
2kT K s
ENC s =
ωt t M
2
Cd 2
+
2
C
+
1
,
2
C
d
i
C
i
106
La condizione di minimo si trova uguagliando
a zero la derivata rispetto a Ci.
L’ENC minimo si trova a Ci≈0,9·Cd
e vale:
2
ENC s ≈
2kT K s
4Cd
ωt t M
Quindi si possono mettere JFET in
parallelo, o aumentare le dimensioni del
MOS, fino quasi a raggiungere la capacità
del rivelatore.
Naturalmente la cosa funziona fino a
capacità del rivelatore “ragionevoli”; non
si possono mettere troppi dispositivi in
parallelo (le capacità parassite crescono
anch’esse) né fare MOS grandi a piacere.
107
Un esempio di matching capacitativo
Preamplificatore a componenti discreti per lettura di
PIN diode da 5 cm2 (read out di HPD)
108
ENCs =
K Cd
tM
⇒ K ≈ 1,8
e
pF
µs
≈ 2,8 e / pF
≈ 2 e / pF
≈ 1,5 e / pF
≈ 1,3 e / pF
109
Matching con trasformatore
Cf
Rf
1:n
Per capacità del rivelatore ancora maggiori il
rivelatore può essere accoppiato al
preamplificatore mediante un trasformatore.
Usando le relazioni ideali di ingresso/uscita di un
trasformatore:
Qδ(t)
Cd
A
Charge
Preamp
Vo I i
= =n
Vi I o
il circuito sul primario viene riportato sul secondario
con il circuito equivalente mostrato in figura.
Quindi, la carica viene ridotta di un fattore n, ma la
capacità viene ridotta di un fattore n2, permettendo
un miglioramento del rapporto segnale rumore.
(Q/n)δ(t)
Cd/n²
I risultati in realtà sono assai meni brillanti, a causa
dei molteplici problemi che presenta un
trasformatore reale. Cfr rif. 17 e 18
110
Terminazione attiva
In qualche raro caso non si può assolutamente mettere il preamplificatore
vicino al rivelatore, ed il segnale deve venire portato con una linea di
trasmissione (non è una situazione esclusiva dei rivelatori di particelle).
Situazione analoga si ha con l’accoppiamento tramite trasformatore, che
deve essere caricato su una resistenza perché non induca oscillazioni.
In questi casi si dovrebbe mettere in seria una resistenza, che darebbe un
contributo al rumore maggiore di quello dell’amplificatore.
Si ricorre allora alla terminazione attiva; amplificatori che hanno impedenza
d’ingresso reale che non contribuisce al rumore. Si parla anche di resistenza
fredda.
111
Il punto fondamentale sta nel disporre di un amplificatore ad alto guadagno,
con polo dominante a frequenza molto bassa. Il circuito equivalente di un
tale amplificatore potrebbe essere questo:
vp
gm
Zi
Ci
x1
Ro
Cf
Co
Rfs
Rf
in cui Ro è la resistenza (virtuale) vista in collettore del cascode e Co è la
capacità (reale, ma con il contributo di capacità parassite) sullo stesso nodo.
Per compensare l’effetto della capacità Ci d’ingresso del transistor (JFET o
MOS), nella rete di feedback viene aggiunta una resistenza Rfs in serie a Cf.
112
In queste condizioni il guadagno ad anello aperto vale:
A = − gmZo = −
g m Ro
1 + sRoCo
Se si pone RoCo=RfCf, trascurando per ora Ci e Rfs, l’impedenza d’ingresso
diviene:
1 Rf
1 Co
Zi =
=
g m Ro g m C f
che è reale (resistiva), a cui
si aggiunge in parallelo Ci.
Aggiungendo in serie a Cf
una resistenza Rfs è
possibile compensare la
presenza di Ci e mantenere
Zi reale fino a frequenze
abbastanza alte (secondo
Radeka …).
113
Un preamplificatore commerciale
E’ quanto di meglio
offra il mercato
(a circa 500€ …)
114
Preamplificatore a componenti discreti per rivelatore a
bassa capacità
per esperimento DONEVET (maggio 1988)
115
ENC vs capacitance
250
ENC = 14,3pF+ 151
200
ENC = 10,6pF + 116
ENC = 7.0pF + 99
electrons
150
tp = 1,3 us
tp = 2,6 us
tp = 5,2 us
tp = 7,8 us
tp = 15,5 us
ENC= 5,1pF + 95
100
ENC = 3,6pF + 102
50
0
0
1
2
3
pF
4
5
6
116
ENC vs peak time
250
200
150
electrons
Cd = 0 pF
Cd = 1,8 pF
Cd = 3,9 pF
Cd = 5,7 pF
100
50
0
0
2
4
6
8
10
12
14
16
18
micro sec
117
Filtro ottimo per la misura del tempo
La misura dell’istante di occorrenza degli eventi è l’informazione primaria dei
sistemi di trigger. Viene anche usata per la localizzazione dell’evento (camere a
drift, localizzazione longitudinale mediante misura di ritardi …).
La teoria del filtro ottimo dice che la forma migliore è quella che, all’istante
della misura, passa per zero con la massima pendenza, minimizzando il time
jitter dovuto al rumore. Quindi la migliore forma per la misura di tempo è la
derivata del filtro ottimo per la misura di energia.
La determinazione del tempo si fa quindi con un
discriminatore zero crossing, che è esente da time
walk (non risente dell’ampiezza del segnale).
Il deficit balistico e il pile-up contribuiscono al time
jitter; bisogna scendere a compromessi diversi da
quelli per la misura di energia (la formatura a flat top
non è buona per la misura di tempo).
Hanno un grave svantaggio: l’informazione temporale è disponibile solo
dopo il tempo di picco (intollerabile per i sistemi di trigger).
Di conseguenza, prevalentemente la misura di tempo è fatta mediante
discriminatori.
118
Acquisizione
L’ampiezza del segnale d’uscita dello shaper è proporzionale alla carica
depositata nel rivelatore. Il segnale deve essere quindi campionato al valore di
picco e digitalizzato.
Esistono varie soluzioni circuitali, che dipendono anche del sistema di
acquisizione nel cui contesto il canale analogico è inserito (ADC per ciascun
canale o ADC asservito a molti canali).
• Sample & Hold
• Peak Detector
• Pipeline analogica
• (Sampling continuo e processamento digitale – non presentato in questo
corso)
119
Sample & Hold (Track & Hold)
Lo schema di principio è assai semplice: a switch chiuso la tensione d’uscita
segue l’ingresso, Quando lo switch si apre, il valore della tensione d’ingresso
resta memorizzato sul condensatore Ch e mantenuto per il tempo necessario
alla conversione. Chiaramente l’OpAmp deve avere ingressi a MOS.
Se l’ADC è asservito a molti canali, il S&H deve mantenere la tensione con
errore trascurabile anche per il tempo di multiplexing e conversione di tutti i
canali
Hold
Vo
Vin
Ch
Il comando sul gate dello switch è fornito da un sistema di trigger, all’istante in
cui il segnale analogico raggiunge il picco.
120
In pratica, ci sono svariati problemi che complicano il disegno di un buon S&H:
1. Iniezione di carica dal segnale di commando dello switch.
La tensione di commutazione applicata al gate dello switch inietta,
attraverso le capacità parassite, della carica che disturba il segnale
memorizzato nel condensatore.
2. “Feedtrough” del segnale d’ingresso.
A switch aperto la capacità di feedtrough forma un partitore capacitivo
con la capacità di hold.
3. Ritardo di fase della tensione sul condensatore.
La resistenza Ron dello switch chiuso con la capacità Ch forma un passabasso che ritarda la tensione sul condensatore rispetto all’ingresso.
4. Ritardo di commutazione dello switch.
Lo switch commuta con un po’ di ritardo rispetto a segnale su gate
5. Perdite di carica sul condensatore.
La carica sul condensatore subisce perdite per varie cause: corrente di
bias dell’OpAmp, leackage dello switch e del condensatore stesso.
6. Rilassamento della tensione sul condensatore.
I tempi di polarizzazione dei dielettrici dei condensatori, che per certi
dielettrici possono arrivare alle decine di secondi, provocano un
rilassamento della tensione sul condensatore, anche con tempi alquanto
lunghi.
121
Contro l’iniezione di carica si può ricorrere a switch analogici basati su “pass
gate”che, in opportune condizioni, minimizzano l’iniezione di carica.
Per contro, le capacità parassite sono più alte rispetto ad un singolo MOS
MAX313
Hold
quad analog switch
Vin
SD5000
quad D-type N-channel MOS
122
La perdite di carica dovute alle correnti di leakage e di bias si possono
compensare con questo circuito:
Assumendo che condensatori, switch e correnti
di bias siano uguali, la deriva sui due
condensatori è uguale mantenendo, in prima
approssimazione, costante l’uscita.
Anche l’iniezione di carica e viene compensata.
Hold
Ch
Vo
Vin
Ch
Il ritardo di fase e il ritardo di commutazione agiscono in direzioni opposte e
in qualche misura si compensano.
Il feedtrough si minimizza imponendo un valore alto alla capacita di hold.
Si impone che la frazione di segnale che passa a switch aperto sia minore della
risoluzione dell’ADC.
Poiché una capacità alta è controindicata in fase di ritorno in tracking, si può
ridurre il feedtrough con una resistenza in serie allo switch; ciò aumenta il
ritardo di fase e il segnale di hold deve essere opportunamente ritardato.
123
Il rilassamento della tensione sul condensatore, dovuto ai ritardi di
polarizzazione del dielettrico, può essere ridotto usando condensatori con
dielettrici veloci e a bassa perdita (mica, policarbonato, teflon …).
Questo è un circuito completo (da rif. 16), con reazione globale che offre
maggiore precisione, e con circuiti di compensazione delle perdite e di
protezione del buffer d’ingresso. La resistenza r è richiesta per ragioni di
stabilità del circuito nella fase di ritorno in tracking, ed introduce un ritardo
di fase che va compensato con un opportuno ritardo sul segnale di hold.
124
Peak Detector
Anche in questo caso il circuito è concettualmente molto semplice.
A switch aperto l’uscita segue l’ingresso se esso è crescente; rimane stabile se
è decrescente. Lo switch viene chiuso per resettare il sistema ad acquisizione
completata.
Di fatto le complicazioni sono anche maggiori del S&H, e la precisione è minore,
essenzialmente perché è difficile compensare le perdite che avvengono durante
lo spegnimento del diodo, e a causa del ritardo (deve uscire dalla saturazione)
con cui il primo amplificatore si mette in tracking quando il diodo rientra in
conduzione.
Vo
Vin
Reset
Ch
125
In pratica, quando è necessario realizzare un peak detector di precisione, si
costruisce un S&H con un circuito che riconosce il picco.
126
Questo è un vero Peak Detector, con reazione globale.
Lo stato di tracking o reset è comandato da una coppia differenziale.
L’iniezione di carica allo spegnimento del diodo è minimizzata tenendo molto
bassa la sua corrente diretta.
La precisione poggia su un accurato bilanciamento delle correnti dei generatori.
L’analisi è un po’ complicata (cfr. rif. 16 pag 383)
127
Questo è un circuito di Peak Detection suggerito da una application note
Intersil (an1309), che restituisce la modulante di un segnale modulato in
ampiezza.
Per adattarlo come peak detector per un segnale di uno shaper, R23 va
sostituita con uno switch.
Il circuito attorno a Q1 serve a prevenire la saturazione del primo OpAmp.
R1, R2 e C3 vanno “tunati” con la risposta in frequenza dello shaper.
128
Pipeline analogica
È una struttura in cui la tensione
analogica d’ingresso viene campionata e
conservata su un array di
condensatori.
Dal punto di vista circuitale può essere
visto come un S&H con condensatori
multiplexati.
read
write
Ch
read
write
Vo
Vin
Ch
write
read
Ch
sia il campionamento di più eventi che occorrano sullo
stesso ingresso, permettendo realizzare multi event
buffers (⇒sistemi DAQ privi di tempo morto).
In questo caso gli switches devono essere controllati
da una opportuna logica di controllo, pilotata dal
sistema di trigger.
Pipeline
128x141
Permette sia il campionamento
continuo della tensione d’ingresso, per
la ricostruzione della forma d’onda,
attivando in successione gli switches;
E’ realizzabile solo in tecnologie VLSI
129
ADC
L’ultimo stadio della catena analogica: la conversione analogico-digitale.
L’ingresso analogico è convertito in un numero binario per il successivo
processamento digitale.
I parametri essenziali che
definiscono un ADC:
• Range dinamico (FS=Full Scale)
• Numero di bits (Nfs=2N-1)
• Tempo di conversione
Da questi si ricava il guadagno, o
risoluzione:
• Gain=FS/Nfs
130
Gli errori più comuni di cui è affetto un ADC:
• Offset error
• Gain error
• Integral non linearity
• Differential non linearity
• Non monotonicità
INL = max
Vn − G ⋅ n
V fs
DNL = max
∆Vn − G
G
131
Alcune architetture di ADC
ADC Wilkinson.
È l’architettura più antica (1950).
Un condensatore caricato alla tensione del segnale d’ingresso (potrebbe
essere il condensatore di memoria del S&H o del Peak Detector) viene
scaricato con corrente costante. Il tempo di scarica, misurato da un contatore
con un clock ad alta frequenza, fornisce la conversione. La conversione
richiede fino a 2N cicli.
Ha buone prestazioni. Richiede elettronica di qualità. È ancora usato in
spettroscopia nucleare.
Vin
stop
Counter
Ch
start
Trigger
clock
132
ADC ad integrazione “dual slope”.
Adatto a segnali lenti.
Buone prestazioni di linearità e
risoluzione.
Richiede elettronica analogica e
componenti di alta qualità.
Un integratore viene caricato con il
segnale d’ingresso per un tempo
fisso, quindi scaricato con corrente
costante; il tempo di scarica è
proporzionale al segnale d’ingresso.
La conversione richiede fino a 2N
cicli, più il tempo di carica.
La tecnica “dual slope” fornisce una
conversione indipendente dai
componenti critici R e C
133
ADC ad inseguimento.
Un contatore Up/Down alimenta un
DAC, la cui uscita viene confrontata
con il segnale d’ingresso. L’uscita del
discriminatore controlla la direzione
del contatore.
La conversione è data dal contatore,
quando il DAC ha agganciato
l’ingresso: richiede fino a 2N cicli.
In grado di inseguire segnali
relativamente veloci.
Ottime prestazioni di linearità
(legate alla qualità del DAC, che è
facilmente integrabili con buone
prestazioni di linearità).
Realizzazione semplice; poca
elettronica analogica, ed elettronica
digitale semplice.
134
ADC ad approssimazioni
successive
La logica di controllo alza un bit alla volta
di un registro a N bits, a partire dal più
pesante. Il contenuto del registro viene
convertito in valore analogico da un DAC, e
confrontato mediante un discriminatore
con il valore d’ingresso. Il bit viene tenuto
o rifiutato a seconda dell’uscita del
discriminatore. La conversione richiede N
cicli.
Velocità di campionamento ≤ 10 Ms/s
Risoluzione 16-18 bit.
Ottime prestazioni di linearità (legate alla
qualità del DAC).
Realizzazione semplice; poca elettronica
analogica, ed elettronica digitale
moderatamente complessa.
E’ l’architettura attualmente più diffusa.
135
Flash ADC
E’ il convertitore più veloce:
100 Ms/s e oltre.
Ha una limitata risoluzione: 8-10 bits
(n. di comparatori = 2n-1)
Linearità limitata dalla qualità del
partitore resistivo.
Molto costoso, non è integrabile in
piccole dimensioni, richiede molta
energia, ma è insostituibile in
applicazioni ad alta velocità.
136
Σ∆ ADC (One bit ADC)
Fornisce uno stream di bits (ampiezza fissa) a frequenza molto elevata
(oversampling), in cui la densità di 1 è proporzionale all’ampiezza del segnale
d’ingresso. Un contatore con clock alla frequenza di oversamplig, resettato alla
frequenza di sampling, fornisce la conversione.
Relativamente lento (≈1 Ms/s).
Risoluzione molto spinta (fino a
24 bit)
E’ molto economico (parte
analogica ridottissima; parte
digitale molto complessa, ma
facilmente integrabile in
VLSI).
Poco usato, per ora, in sistemi
di acquisizione.
137
Riferimenti e bibliografia.
1.
P. Reahk. Detection and Signal Processing in High Energy Physics.
Rendiconti della Scuola Internazionale di Fisica “Enrico Fermi” LXXXIV corso (1981).
2.
F. Sauli. Principles of Operation of Multiwire Proportional and Drift Chambers. Cern 77-09 (1977).
3.
H.A. Haus. Rappresentation of Noise in Linear Twoports. Proc. IRE, vol 48 (1960).
4.
P.W. Nicholson. Nuclear Electronics. J. Wiley.
5.
S. Ohkawa et al. Direct Synthesis of the Gaussian Filter for Nuclear Pulse Amplifier. NIM 138 (1976) 85-92
6.
E. Gatti, P.F. Manfredi. Processing the Signal from Solid State Detector in Elementary-Particle Phisics. La rivista del
Nuovo Cimento, vol 9 serie 3 num 1 (1986).
7.
H.W. Ott. Noise Reduction Techniques in Electronic Systems. J. Wiley.
8.
R.A. Boie, A.T. Hrisoho, P. Rehak. Signal Shaping and Tail Cancellation…
NIM 192:365-374,1982
9.
H. Spieler. Semiconductor detector systems. Oxford University Press.
10. A. Papoulis. Probabilità, variabili aleatorie e processi stocastici. Boringhieri.
11.
J.B. Johnson. Thermal Agitation of Electric Charge in Conductors. Phys.Rev. Vol. 32 (1928) pp.97-109.
12. H. Nyquist. Thermal Agitation of Electric Charge in Conductors. Phys.Rev. Vol. 32 (1928) pp.110-113.
13. M.S. Kesher. 1/f Noise. Proc. IEEE vol. 70 (1982) pp. 212-218
14. D. Wolf. 1/f Noise. Da: Noise in Physical Systems. Springer-verlag
15. Van der Ziel. Noise in Measurements. J. Wiley
16. P.F. Manfredi, P. Maranes, T. Tacchi. L’amplificatore operazionale, Boringhieri
17. E. Gatti, P.F. Manfredi, D. Marioli. Limitations in Transformer Coupling between Radiation Detectors and Head Amplifier.
NIM, vol. 193, (1982) pp. 539-547
for Large
18. E. Gatti, P.F. Manfredi, G. Ripamonti. On the Correct Choiche of Transformer Ratio in Low Noise Preamplifiers 138
detectors capacitance. NIM-A, vol. 257-2, (1987) pp. 331-338