Prove e misure sulle macchine - 1
Prove e misure sulle macchine
1 - Generalità
Tipi di prove
La costruzione di un’apparecchiatura o di una macchina elettrica richiede normalmente la verifica dei requisiti stabiliti in sede di progetto.
Inoltre, nel caso in cui il prodotto sia destinato alla vendita o all’uso di terzi occorre dimostrare di aver soddisfatto alle specifiche contrattuali.
Per conseguire tali obiettivi, è necessario sottoporre gli apparati e le macchine a prove e misure. La misura, normalmente ha come scopo quello di conoscere in termini quantitativi un parametro o una grandezza fisica, rappresentandoli con un numero, una unità di misura, e
un’incertezza. Una prova, invece, corrisponde a un contesto più ampio e spesso consiste in
una serie di misure coordinate per conseguire una conoscenza più completa di un dispositivo,
un apparecchio, un impianto o un processo.
Per esempio, con riferimento alle macchine elettriche, si distinguono usualmente le prove di
accettazione e le prove di tipo. Le prove di accettazione sono effettuate su ogni singola
macchina; le prove di tipo sono effettuate su una macchina rappresentativa di altre macchine, con
un controllo statistico delle condizioni specificate.
La conoscenza, mediante prove e misure, del comportamento e delle caratteristiche di
un’apparecchiatura, un impianto o un processo è richiesta, oltre che in sede di collaudo per la
verifica iniziale della conformità, anche durante l’esercizio, per verificare il permanere del
corretto funzionamento nel tempo, durante la vita utile. In particolare, le verifiche in esercizio
hanno una duplice rilevanza, riguardo al comportamento funzionale del dispositivo nel contesto produttivo e riguardo alla sicurezza delle persone e delle cose.
Le prove e le misure sulle macchine e gli impianti elettrici sono codificati dalle Norme riconosciute e accettate in sede internazionale.
Nel seguito di questo capitolo vengono illustrate e motivate le prove e le misure che si applicano a due tipi di macchine importanti e molto diffuse nell’ambito dell’ingegneria elettrica: i
trasformatori di potenza e i motori asincroni. Nel successivo capitolo saranno esaminate alcune delle prove e misure più diffuse su gli impianti elettrici.
Prima di esaminare le prove sulle macchine elettriche, diamo alcune indicazione sui loro dati
di targa.
I dati di targa
I dati di targa riportano i principali elementi identificativi di una macchina o, più in generale
di un’apparecchiatura elettrica.
Inoltre i dati di targa contengono le informazioni sulle grandezze elettriche nelle condizioni di
funzionamento nominali, nonché le indicazioni sulle modalità di funzionamento in relazione
alle condizioni ambientali (per esempio la temperatura o altitudine) e di esercizio (per esem© 2014, Nicola Locci
Misure sui Sistemi di Potenza
2 - Prove e misure sulle macchine
pio i cicli di lavoro).
Nel seguito presentiamo e discutiamo i dati di targa che sono tipicamente riportati per i trasformatori e per i motori asincroni.
Le grandezze nominali
Le grandezze nominali di una macchina o un dispositivo, sono un insieme di valori numerici
che ne individuano il funzionamento, in condizioni specificate, e su cui si basano le garanzie
del costruttore e le prove. Le grandezze nominali usualmente dichiarate, variano caso per caso. Per fissare le idee, consideriamo i trasformatori e i motori asincroni:
1.1 - Dati di targa dei trasformatori
La tensione nominale di un avvolgimento (Vn) è la tensione specificata per essere applicata fra
i terminali di linea all’avvolgimento primario (V1n), oppure che viene indotta a vuoto
all’avvolgimento secondario (V2n).
Per un trasformatore monofase, la potenza nominale (Sn) è il valore convenzionale della potenza apparente assegnata a un avvolgimento che, insieme alla tensione nominale (Vn) definisce la sua corrente nominale (In).
Entrambi gli avvolgimenti di un trasformatore monofase hanno la stessa potenza nominale,
che per definizione è la potenza nominale del trasformatore (Norma CEI EN 60076-1).
S n = V1n I 1n = V2 n I 2 n
(1.1)
La relazione precedente non significa che la potenza in ingresso è uguale alla potenza in uscita, ma solo che entrambi gli avvolgimenti possono trattare la stessa potenza apparente che caratterizza la macchina. La potenza nominale si riferisce a un carico permanente.
Per un trasformatore trifase, a potenza nominale è: S n = 3 V1n I1n , dove V1n è la tensione
concatenata e I1n è la corrente di linea.
Per i trasformatori con potenza superiore a 1kVA, se monofasi, o con potenza superiore a 5kVA,
se trifasi, i dati di targa devono riportare in ogni caso: la Norma di riferimento (CEI EN 600761), il tipo di trasformatore, il nome del costruttore, l’anno di fabbricazione e il numero di serie.
Inoltre deve essere indicato: il numero delle fasi, la potenza nominale in kVA, la frequenza
nominale in Hz, le tensioni nominali (in V o kV), l’impedenza di corto circuito, o la tensione di
corto circuito (in %), le correnti nominali (in A o kA).
Il gruppo degli avvolgimenti
Nel caso dei trasformatori trifasi deve essere specificata la modalità di collegamento degli
avvolgimenti.
Per indicare il tipo di connessione dell’avvolgimento AT si impiegano i simboli maiuscoli: D (a
triangolo), Y (a stella) e Z (a zig-zag).
Per indicare il tipo di connessione dell’avvolgimento BT si impiegano i simboli minuscoli (d, y,
z), con lo stesso significato. La presenza del neutro accessibile si indica con la notazione (n).
Si assegna anche lo sfasamento fra le tensioni primarie e secondarie o il cosiddetto numero
orario. Per comprendere meglio questo punto, si consideri l’esempio riportato in Fig.1.1, che si
riferisce a un trasformatore di distribuzione MT/BT di tipo triangolo-stella con neutro accessibile.
Normalmente, l’avvolgimento primario e quello secondario di una fase sono montati sullo stessa
colonna del nucleo magnetico, quindi la tensione applicata e quella indotta saranno in fase
oppure in opposizione. La corretta polarità sarà indicata da appositi contrassegni sui morsetti
degli avvolgimenti.
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Prove e misure sulle macchine - 3
Per esempio, l’avvolgimento MT sottoposto alla tensione V12 ha un diagramma fasoriale
rappresentato come in Fig.2.1, in cui il vertice 1 della fase L1 è posto sulle ore 12 di un ipotetico
quadrante di orologio. Allora Il vertice 1 del fasore della tensione indotta E1 sul lato BT risulta
sfasato di 30°, dunque orientato verso le ore 11.
La designazione completa del gruppo, per l’esempio di Fig.1.1, è allora: Dyn11.
Fig.1.1 - Schema per il gruppo di un trasformatore trifase.
Prese di regolazione
Normalmente i trasformatori trifasi hanno le prese intermedie per la regolazione a gradini della
tensione. Un esempio tipico dei campi di regolazione è ± (2x2,5%) e in totale si hanno cinque
posizioni di regolazione.
Nei trasformatori di distribuzione MT/BT la regolazione avviene inizialmente, prima della messa
in servizio con collegamenti fissi, tramite placchette metalliche imbullonate.
Nei trasformatori AT/MT la regolazione può avvenire in esercizio con commutatori meccanici
sotto carico (tap changers).
Trasformatori in olio e a secco
I trasformatori di potenza sono normalmente isolati in olio oppure sono a secco, con gli
avvolgimenti inglobati in resina (Fig.1.2) . La massa del contenuto d’olio è riportato nella targa.
Fig.1.2 - Trasformatore con isolamento in olio (a sinistra) e in resina.
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
4 - Prove e misure sulle macchine
I trasformatori di potenza a secco sono molto diffusi soprattutto per le installazioni entro gli
edifici civili (per esempio alberghi, ospedali, centri commerciali e di servizi ecc.) e sono trattati
da una Norma specifica (IEC 726, CEI 14-8) che integra la precedente e ne tratta gli aspetti
particolari.
Per i trasformatore in resina la Norma IEC 60076-11 definisce le classi ambientali (E), climatica
(C) e di comportamento al fuoco (F). Esempio: E2-C2-F1 (Fig.1.3).
Fig.1.3 - Codici per i trasformatori a secco.
Raffreddamento
Per i trasformatori più piccoli in olio, si usa direttamente la superficie del cassone di
contenimento per dissipare il calore prodotto. Lo smaltimento del calore avviene per circolazione
naturale dell’olio attraverso gli avvolgimenti, che poi lambisce anche la superficie del cassone,
che viene raffreddata con la circolazione naturale dell’aria esterna (sistema ONAN, Oil Natural,
Air Natural). In certi casi si rafforza lo scambio termico con l’aria esterna per mezzo di
ventilatori (sistema ONAF, Oil Natural, Air Forced).
Per le macchine più grandi si impiegano scambiatori e radiatori supplementari e la circolazione
forzata anche dell’olio (sistema OFAF, Oil Forced, Air Forced).
Anche i trasformatori a secco possono avere sistemi di refrigerazione naturale o forzata.
1.2 - Dati di targa dei motori asincroni
La potenza nominale (Pn) di un motore asincrono è la potenza meccanica che può essere resa
sull’albero (Norma CEI EN 60034-1), nelle condizioni di alimentazione con una terna simmetrica di tensioni sinusoidali con il valore nominale (Vn), alla frequenza nominale (fn), usualmente 50 Hz per il mercato europeo. La potenza è espressa in watt (W).
Nella dichiarazione delle caratteristiche nominali di una macchina è importante precisare il
tipo di servizio, cioè definire il tipo di carico o di sequenza di carichi cui la macchina può essere sottoposta, inclusi i periodi di avviamento, frenatura e funzionamento a vuoto, nonché la
loro durata e modalità di applicazione nel tempo. Queste specifiche sono importanti con riferimento alla severità dei transitori termici e al raggiungimento dell’eventuale equilibrio.
Tipo di servizio
Le Norme distinguono diversi tipi di servizio per i motori asincroni:
S1 - Servizio continuativo (continuous duty ). Funzionamento a carico costante di durata sufMisure sui Sistemi di Potenza
© 2014, Nicola Locci
Prove e misure sulle macchine - 5
ficiente al raggiungimento dell’equilibrio termico.
S2 - Servizio di durata limitata (short-time duty). Funzionamento a carico costante per un periodo di tempo determinato, inferiore a quello richiesto per raggiungere l’equilibrio termico,
seguito da un periodo di riposo di durata sufficiente a ristabilire l’uguaglianza fra le temperature della macchina e del fluido di raffreddamento.
S3 - Servizio intermittente periodico (intermittent periodic duty). Sequenza di cicli di funzionamento identici, ciascuno comprendente un periodo di funzionamento a carico costante ed
un periodo di riposo. In questo servizio il ciclo è tale che la corrente di avviamento non influenza la temperatura in maniera significativa.
S4 - Servizio intermittente periodico con avviamento (intermittent periodic duty with starting). Sequenza di cicli di funzionamento identici, ciascuno con una fase non trascurabile di
avviamento.
S5 - Servizio intermittente periodico con frenatura elettrica (intermittent periodic duty with electric braking). Sequenza di cicli di funzionamento identici, ciascuno comprendente una fase
non trascurabile di avviamento, un periodo di funzionamento a carico costante, la frenatura
elettrica rapida ed un periodo di riposo.
S6 - Servizio ininterrotto periodico (continuous operation with intermittent load). Sequenza di
cicli di funzionamento identici, ciascuno comprendente un periodo di funzionamento a carico
costante ed un periodo di funzionamento a vuoto. Non esiste alcun periodo di riposo.
S7 - Servizio ininterrotto con frenatura elettrica (continuous operation with electric braking).
Sequenza di cicli di funzionamento identici, ciascuno comprendente una fase di avviamento
un periodo di funzionamento a carico costante ed una fase di frenatura elettrica. Non esiste
periodo di riposo.
Classe di isolamento
La classe di isolamento (insulation class) è una designazione letterale che indica la capacità
degli isolanti e degli avvolgimenti del motore di sopportare un valore specificato di temperatura per un assegnato periodo di tempo. Lo standard IEC prevede per i motori le seguenti
classi di isolamento, con valori massimi della temperatura:
Classe B (130 °C), Classe F (155 °C), Classe H (180 °C).
Per ciascuna classe è prevista una sovratemperatura massima, oltre una temperatura ambiente
massima di 40°C, e infine anche un margine di sicurezza hotspot (vedi Fig.1.4).
Fig.1.4 - Temperature per la classe di isolamento.
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
6 - Prove e misure sulle macchine
Grado di protezione
Il grado di protezione nei riguardo della penetrazione di solidi e liquidi all’interno della macchina è dato per mezzo dei codici internazionali di protezione (IP International Protection).
La prima cifra del codice indica il grado il protezione nei riguardi dei solidi, la seconda cifra
indica il grado di protezione nei riguardi dei liquidi (vedi Fig.1.5).
Fig.1.5 - Codici per il grado di protezione IP.
Codici per il raffreddamento
Il codice internazionale per il raffreddamento IC (International Cooling) rappresenta la modalità con la quale si asporta il calore prodotto dal motore. Il fluido di raffreddamento primario
(liquido o gassoso) è quello contatto con la macchina, a una temperatura inferiore. Il fluido
secondario assorbe in uno scambiatore il calore ceduto dal fluido primario.
Il codice principale è formato da tre cifre (vedi Fig.1.6 a sinistra).
Per esempio il codice IC 411, uno fra i più diffusi, significa: (4) la ventilazione è sulla superficie esterna alettata, (1) il motore è auto ventilato e il fluido di raffreddamento primario è
l’aria a diretto contatto con la carcassa, (1) il fluido secondario non è presente.
Il codice di raffreddamento IC può avere anche un’ulteriore cifra opzionale (vedi Fig.1.6 a destra) per indicare il tipo di circuito esterno di raffreddamento, quando presente.
Fig.1.6 - Codici per il raffreddamento IC (a sinistra).
Ulteriore codice per il raffreddamento (a destra).
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Prove e misure sulle macchine - 7
Codici per il montaggio
Il codice internazionale per il montaggio IM (International Mounting) rappresenta, secondo lo
standard IEC, la forma costruttiva, la disposizione di montaggio per i cuscinetti, l’asse, i piedi
del basamento o la flangia, il tipo di estremità d’albero.
In Fig.1.7 si riporta un estratto delle norme. Per esempio un codice di montaggio molto diffuso è IM 1001(vecchia designazione IM B3) che significa motore montato su piedini a terra.
La designazione IEC con soli numeri ha sostituito la precedente designazione con lettere e
numeri (riportata dalla stessa norma per agevolare la transizione).
Fig.1.7 - Esempio di codici per il montaggio IM.
Nella Fig.1.8 si mostrano motori asincroni commerciali di diverse taglie e una targa tipica di
identificazione.
Fig.1.8 - Motori asincroni di diverse taglie.
Esempio di targa di un motore.
1.3 - Il rendimento e la potenza persa
Una delle caratteristiche più importanti di una macchina, in generale, è rappresentata dal suo
rendimento. Si definisce rendimento effettivo il rapporto fra la potenza erogata P2 e la potenza
assorbita P1:
η=
P2
P1
© 2014, Nicola Locci
(1.2)
Misure sui Sistemi di Potenza
8 - Prove e misure sulle macchine
La differenza fra la potenza assorbita P1 e la potenza resa P2 rappresenta la potenza persa:
(1.3)
Pp = P1 − P2
Il rendimento può esser dato in diverse condizioni di funzionamento e di carico e raggiunge
tipicamente il valore massimo intorno alla potenza nominale.
La determinazione della potenza persa secondo la definizione precedente (misura per differenza) può avere come è noto un’incertezza relativa elevata, soprattutto se il rendimento è alto. Pertanto si cerca, in questi casi e quando è possibile, di determinare la potenza persa in
modo indiretto, come somma delle singole perdite Pp se queste possono essere ottenute in
modo più semplice e accurato.
Il rendimento ottenuto in questo modo viene detto rendimento convenzionale:
ηc =
Pp
P2 P1 − Pp
∑ Ppi
=
=1−
=1−
P1
P1
P1
P1
(1.4)
La determinazione del rendimento e delle perdite viene fatta normalmente per diverse condizioni di carico e alle grandezze di funzionamento nominali.
Le incertezze
Il rendimento η è il rapporto tra la potenza resa P2 e la potenza assorbita P1, mentre la potenza
persa Pp è la differenza fra le potenze P1 e P2.
Se le potenze P1 e P2 sono misurate con lo stesso errore relativo εP, gli errori assoluto e relativo nella determinazione del rendimento η sono (nel caso peggiore):
Eη =
2P
∂η
∂η
−P
P
EP1 +
EP2 = 22 εP P1 + 12 εP P2 = εP 2
∂P1
∂P2
P1
P1
P1
2P P
εη =
= εP 2 ⋅ 1 = 2εP
η
P1 P2
Eη
(1.5)
Mentre gli errori assoluto e relativo e nella determinazione della potenza persa Pp sono:
EPp =
∂Pp
∂P1
EP1 +
∂Pp
∂P2
EP2 = 1⋅ εP P1 + − 1⋅ εP P2 = εP ( P1 + P2 )
1+ η
P +P
εPp =
= εP 1 2 = εP
1− η
Pp
P1 − P2
EPp
(1.6)
L’errore relativo nella misura della potenza persa Pp cresce con il valore del rendimento.
Pertanto, anche se la misura delle due potenze P1 e P2 è fatta con un piccola incertezza relativa εP, questa si degrada nella misura della potenza persa.
In Fig.1.9 si riportano delle curve che mostrano l’errore relativo sulla potenza persa al variare
del rendimento, per valori di εP = 0,2 - 0,4 - 0,6 - 0,8 - 1,0 %.
Il rendimento nei trasformatori e nei motori
Nel caso dei trasformatori, il rendimento viene determinato in forma convenzionale individuando separatamente le perdite che, nel funzionamento ordinario, si manifestano contemporaneamente.
Nel caso dei motori asincroni si preferiscono metodi diretti di prova a carico.
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Prove e misure sulle macchine - 9
Nel seguito di questo capitolo esaminiamo dapprima le prove previste per i trasformatori di
potenza e successivamente quelle previste per i motori asincroni.
Fig.1.9 - Errori nella misura della potenza persa al variare del rendimento.
2 - Prove e misure sui trasformatori
I trasformatori vengono sottoposti normalmente alle prove di accettazione o di tipo nelle officine
del costruttore. Prove speciali possono essere concordate fra costruttore e acquirente ed essere
svolte in laboratori di terzi.
Tutta la strumentazione di misura deve essere conforme alle Norme ISO 9000.
Prove di accettazione
Le prove di accettazione, quando previste, sono normalmente costituite da:
• Misura della resistenza degli avvolgimenti.
• Misura del rapporto di trasformazione e verifica del gruppo vettoriale.
• Misura dell’impedenza di corto circuito e delle perdite a carico.
• Misura della corrente e delle perdite a vuoto.
• Prove dielettriche di accettazione.
• Prove sui commutatori sottocarico, se installati.
Prove speciali
• Prove dielettriche speciali.
• Determinazione delle capacità degli avvolgimenti verso terra e fra di essi.
• Misura delle impedenze omopolari, per trasformatori trifasi.
• Prova di tenuta al cortocircuito.
• Determinazione dei livelli di rumore acustico.
• Misura delle armoniche della corrente a vuoto.
• Misura della potenza assorbita dalle parti ausiliarie, quali ventilatori di raffreddamento e
pompe di circolazione dell’olio.
• Misura della resistenza d’isolamento degli avvolgimenti verso terra.
Per i metodi di prova non codificati dalle Norme, valgono gli accordi preventivi fra le parti.
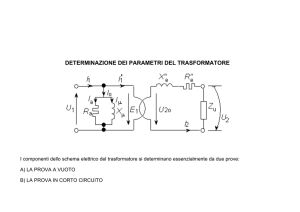
Prova a vuoto
Con la prova a vuoto si determinano i componenti del circuito equivalente del ramo
magnetizzante e si valutano le perdite nel ferro.
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
10 - Prove e misure sulle macchine
Per eseguire la prova a vuoto (vedi Fig.2.1), si alimenta il trasformatore a un avvolgimento
(per esempio il primario) con onda sinusoidale, lasciando l’altro avvolgimento (il secondario)
aperto. La tensione e la frequenza di alimentazione sono pari ai valori nominali: V1n e fn.
Fig.2.1 - Schema per la prova a vuoto.
Nella prova a vuoto, si misurano la tensione V1n, la corrente I10 e la potenza attiva P10.
Da queste grandezze si deducono:
1) la potenza reattiva:
Q10 = (V1n I10 ) 2 − P102
(2.1)
2) il fattore di potenza:
cos ϕ10 =
P10
V1n I10
(2.2)
3) le componenti del ramo magnetizzante (parallelo) del circuito equivalente:
Z10 =
V1n
;
I10
R10 =
V12n
;
P10
X 10 =
V12n
Q10
(2.3)
La potenza attiva assorbita in queste condizioni è prevalentemente dissipata nel nucleo in ferro, per fenomeni di isteresi e correnti parassite. Risulta praticamente trascurabile la potenza
persa per effetto Joule nell’avvolgimento primario, infatti la corrente I10 è molto piccola.
Prova in corto circuito
Con la prova in corto circuito si determina il valore dell’impedenza di corto circuito e il valore
delle perdite nel rame.
La prova in corto circuito si realizza alimentando la macchina su un avvolgimento (per esempio il primario), con onda sinusoidale, e chiudendo l’altro avvolgimento (il secondario) in corto circuito. Lo schema di riferimento è riportato in Fig.2.2.
La corrente e la frequenza di alimentazione sono pari ai valori nominali: I1n e fn.
Fig.2.2 - Schema per la prova in corto circuito.
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Prove e misure sulle macchine - 11
La tensione necessaria per far circolare nella macchina in corto circuito la corrente nominale
I1n risulta assai più piccola della tensione nominale. La tensione di alimentazione per tale prova, prende il nome di tensione di corto circuito V1cc.
Per esempio, i trasformatori di distribuzione MT/BT hanno una tensione di corto circuito tipica dell’ordine del 4÷6 % della tensione nominale.
Nella prova in corto circuito, si misurano la tensione di alimentazione V1cc, la corrente I1n e la
potenza attiva P1cc assorbita. Da queste grandezze si deducono:
1) la potenza reattiva:
Q1cc = (V1cc I1n ) 2 − P12cc
(2.4)
2) il fattore di potenza:
cos ϕ1cc =
P1cc
V1cc I1n
(2.5)
3) le componenti del ramo serie del circuito equivalente:
Z 1cc =
V1cc
;
I 1n
R1cc =
P1cc
;
I 12n
X 1cc =
Q1cc
I 12n
(2.6)
La potenza attiva assorbita in queste condizioni è prevalentemente dissipata nel rame degli
avvolgimenti per effetto Joule (le perdite a carico), mentre risulta in pratica trascurabile quella
persa nel ferro, infatti il flusso è ridotto in proporzione alla tensione di alimentazione Vcc.
Si può osservare che nelle prove a vuoto e in corto circuito, la macchina assorbe solo una piccola
frazione della sua potenza nominale.
In prima approssimazione, si può anche ritenere che, quando la macchina eroga la potenza
nominale Pn, le perdite totali siano: Pdn = P10 +P1cc.
In realtà, una stima della potenza persa più accurata, e in accordo con le Norme, richiede anche
la determinazione della resistenza degli avvolgimenti e alcune ulteriori considerazioni.
Determinazione della resistenza degli avvolgimenti
La misura della resistenza propria degli avvolgimenti primario e secondario deve essere fatta
in corrente continua (per ridurre gli effetti di autoinduzione) e possibilmente con il metodo a
quattro morsetti (trattandosi di resistenze di piccolo valore).
Normalmente, durante la prova, la macchina è “a freddo”, cioè si trova alla temperatura ambiente Ta.
Le Norme richiedono di riferire la resistenza degli avvolgimenti a una temperatura che sia ragionevolmente vicina a quella di esercizio: pertanto i valori di resistenza misurati devono essere riportare a una opportuna temperatura di riferimento Tref che dipende dalle caratteristiche
degli isolanti. Ad esempio, per un trasformatore in olio, la temperatura di riferimento convenzionale può essere pari a Tref = 75 °C.
La prescrizione nasce dal fatto che la resistività dei conduttori varia in modo consistente con
la temperatura. Infatti, se indichiamo con R0 il valore della resistenza di un avvolgimento alla
temperatura di 0 °C e ricordiamo che il coefficiente di variazione della resistività del rame
con la temperatura è α = 0,0043 /°C, avremo i seguenti valori di resistenza, rispettivamente
alla temperatura ambiente Ta e alla temperatura Tref:
Ra = R0 (1 + αTa )
© 2014, Nicola Locci
Rref = R0 (1 + αTref )
(2.7)
Misure sui Sistemi di Potenza
12 - Prove e misure sulle macchine
Allora, combinando le due espressioni risulta:
Rref = Ra
1 + αTref
1 + αTa
= Ra
235 + Tref
235 + Ta
= Ra ⋅ kT
(2.8)
dove kT è il coefficiente per il riporto della resistenza alla temperatura di riferimento Tref.
La relazione trovata consente dunque di valutare la resistenza di un avvolgimento alla temperatura Tref = 75 °C, misurando la resistenza Ra alla temperatura ambiente Ta.
Per esempio, se Ra = 10 mΩ, con Ta = 18 °C, risulta R75 = 12,25 mΩ, con un incremento di
resistenza del 22 %.
Le perdite addizionali
Se alimentiamo il trasformatore dal lato primario, la resistenza complessiva R1Cu degli avvolgimenti in rame del circuito equivalente è data dalla resistenza primaria R1 e da quella secondaria R2 riportata al primario, tramite il quadrato del rapporto spire.
Avendo indicato con n il rapporto fra il numero di spire primarie N1 e quello delle spire secondarie N2), avremo:
R1Cu = R1 + R21 = R1 + n 2 R2
(2.9)
Se alimentiamo il primario con la corrente nominale I1n, la potenza persa per effetto Joule è:
P1Cu = R1Cu I12n
(2.10)
In realtà, si osserva che questa potenza è minore della potenza P1cc assorbita nella prova in corto
circuito. Ciò è dovuto al fatto che i flussi dispersi Φd si chiudono su percorsi indesiderati, come il
cassone di contenimento e altre parti in acciaio (elementi di serraggio del pacco lamierini,
bulloni, traverse, ecc.). In queste masse ferrose, che non fanno parte del circuito magnetico
principale, determinano delle tensioni indotte VFe = (ωΦd) e la conseguente circolazione di
correnti indotte IFe: dunque delle perdite addizionali Padd = VFe2/RFe = RFe⋅IFe2.
Con RFe è stata indicata la resistenza equivalente di tali percorsi nel ferro.
Le perdite addizionali (che sono normalmente di ridotta entità) trovano riscontro nella potenza
totale assorbita in corto circuito P1cc.
Infatti la potenza Padd che corrisponde alle perdite addizionali viene assorbita in aggiunta alla
potenza P1Cu persa nel rame: P1cc = P1Cu + Padd. Inoltre, osservando che i flussi dispersi Φd sono
proporzionali alla corrente I1n che attraversa la macchina, si ha:
Padd = P1cc − P1Cu =
P1cc − R1Cu I12n
2
(ωΦd ) = R I 2
VFe
=
=
add 1n
RFe
RFe
2
; Padd
(2.11)
Nella relazione che precede, le perdite addizionali sono state espresse in una forma che introduce
la resistenza addizionale equivalente Radd.
Se tutte le misure della prova in corto circuito sono state fatte alla temperatura ambiente Ta,
bisogna infine riportarle alla temperatura di riferimento Tref.
Le perdite ohmiche nel rame P1Cu variano proporzionalmente al fattore kT di riporto alla
temperatura di riferimento.
Riguardo alle perdite addizionali Padd, le Norme ammettono invece che siano inversamente
proporzionali al coefficiente kT. Infatti, al crescere della temperatura, cresce anche la resistenza
propria delle masse ferrose RFe. Pertanto, a parità di corrente nella macchina I1n e di flusso
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Prove e misure sulle macchine - 13
disperso Φd che interessa le masse ferrose e quindi a parità di tensione indotta VFe, si riduce la
corrente circolante IFe e dunque la potenza dissipata VFe2/RFe = (ωΦd)2/ RFe.
In definitiva, le perdite a carico nominale I1n e alla temperatura di 75 °C saranno:
P1Cu , 75 = kT R1Cu I12n = R1Cu , 75 I12n
Padd , 75 =
Radd 2
I1n = Radd ,75 I12n
kT
(2.12)
Anche l’impedenza di corto circuito deve tener conto delle grandezze riportate alla temperatura
di riferimento. Quindi si assume che la reattanza rimanga costante e che la resistenza, ricavata
dalla misura delle perdite a carico, vari come è stato appena descritto. Perciò:
R1cc ,75 = R1Cu ,75 + Radd ,75
Z1cc ,75 = R1cc ,75 + jX 1cc
(2.13)
La corrente di alimentazione nella prova in corto circuito dovrebbe essere pari alla corrente nominale. Se questa corrente è troppo elevata per le sorgenti disponibili nel laboratorio, si può impiegare una corrente I1cc ridotta, ma non inferiore al 50 % del valore nominale I1n.
Il valore delle perdite misurate in tali condizioni deve essere moltiplicato per quadrato del rapporto fra la corrente nominale I1n e la corrente effettiva della prova I1cc per ottenere le perdite alla
corrente nominale I1n.
Il rendimento convenzionale
La potenza convenzionale totale persa nel funzionamento nominale, cioè alla tensione nominale V1n, alla corrente nominale I1n e alla temperatura di riferimento Tref = 75 °C è:
Pdn = P10 + P1cc ,75 = P10 + P1Cu ,75 + Padd ,75
(2.14)
Il rendimento convenzionale in condizioni nominali è dunque:
ηc =
Pun
Pun
P − Pdn
P
=
= an
= 1 − dn
Pan Pun + Pdn
Pan
Pan
(2.15)
Nel caso di macchine trifasi si fa riferimento alle potenze totali trifasi.
Verifica delle polarità
La verifica delle polarità per le tensioni in un trasformatore è importante in alcune applicazioni: per esempio quando si debbano collegare in parallelo due trasformatori, oppure quando si
eseguono misure di potenza tramite trasformatori di misura.
Per eseguire la verifica delle polarità esistono molti modi; in Fig.2.3 è presentato un semplice
metodo che impiega solo un voltmetro.
Si misura dapprima il valore efficace delle tensioni V1 e V2. Successivamente si collegano un
morsetto del primario e uno del secondario, e si dispone il voltmetro fra i restanti due morsetti. L’indicazione ΔV del voltmetro sarà:
• nel caso A): il valore efficace della somma vettoriale (V1+V2),
• nel caso B): il valore efficace della differenza vettoriale (V1-V2).
Poiché, di fatto, i vettori V1 e V2 sono praticamente allineati, l’indicazione ΔV del voltmetro
sarà pari alla somma dei valori efficaci delle tensioni V1 e V2, nel caso A); mentre risulterà pari alla differenza dei valori efficaci delle tensioni V1 e V2, nel caso B).
Queste osservazioni consentono di stabilire la corretta polarità delle tensioni primaria e secondaria (in fase, ovvero in opposizione) e di posizionare correttamente i contrassegni di identificazione.
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
14 - Prove e misure sulle macchine
Fig.2.3 - Schemi per la verifica delle polarità mediante un voltmetro.
Prima di effettuare la verifica delle polarità con questo metodo, è necessario accertarsi se il
voltmetro può sostenere la somma delle due tensioni. Se il voltmetro non è in grado, si può
alimentare il trasformatore a tensione ridotta.
Per la verifica delle polarità si può impiegare anche un oscilloscopio.
In tal caso, si inviano la tensione primaria e quella secondaria ai due canali d’ingresso
dell’oscilloscopio per verificare immediatamente sullo schermo se le due forme d’onda sono in
fase tra loro o in opposizione di fase.
In questa prova bisogna porre attenzione al fatto che gli ingressi coassiali dell’oscilloscopio hanno gli schermi posti a massa e che la massa è posta a terra, attraverso il conduttore di protezione.
Pertanto la tensione di alimentazione del trasformatore in prova, qualora sia prelevata dalla rete
di distribuzione ordinaria con neutro a terra (vedi Fig.2.4), non può essere applicata direttamente
a un canale d’ingresso dell’oscilloscopio, perché si può avere un corto circuito severo.
Fig.2.4 - Schema che mostra il corto circuito che si può verificare
applicando la tensione di rete all’oscilloscopio.
Questo infatti si verifica nel caso in cui il polo della fase venga portato all’oscilloscopio tramite il
conduttore di schermo della sonda, che è a massa e dunque a terra.
Nella pratica, il problema si può evitare ricorrendo a un’alimentazione flottante, ottenuta, per esempio, tramite un altro trasformatore (con funzione di separatore galvanico).
Misura dell’impedenza di sequenza zero
L’impedenza a sequenza zero (o omopolare) ha interesse per un trasformatore trifase.
La sua conoscenza è importante per la valutazione delle correnti di guasto. Infatti, quando, in
occasione di un guasto, il sistema delle tensioni di rete non è più simmetrico, è noto che può
essere rappresentato mediante le terne di sequenza (sequenza diretta, inversa e omopolare).
Per conoscere le corrispondenti terne di sequenza del sistema delle correnti, risolvendo la rete,
è necessario determinare le impedenze offerte dalla rete e dai suoi componenti in quelle condizioni.
Nel caso di un trasformatore trifase, come noto, le impedenze a vuoto e in corto circuito
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Prove e misure sulle macchine - 15
(quelle determinate nelle classiche prove) non cambiano a seconda che la macchina sia alimentata da una terna di tensioni simmetriche alla sequenza diretta o inversa.
Deve essere invece valutata e misurata a parte l’impedenza omopolare.
L’impedenza omopolare (alla sequenza zero) di un trasformatore trifase è l’impedenza vista
fra ciascuno dei terminali di linea (L1 L2 L3) collegati insieme e il terminale di neutro (N).
In Fig.2.5 è riportato uno schema per la misura dell’impedenza omopolare, nel caso di un trasformatore con avvolgimenti primari connessi a stella con neutro accessibile.
Fig.2.5 - Schema per la misura dell’impedenza omopolare Z0.
Il generatore di alimentazione U deve essere sinusoidale alla frequenza nominale.
L’impedenza omopolare viene indicata con Z0 ed espressa in Ω/fase:
Z 0 = 3U / I
(2.16)
L’impedenza omopolare Z0 misurata al lato primario (vedi lo schema di Fig.2.5) può avere significati e valori diversi a seconda delle connessioni degli altri avvolgimenti della macchina,
del fatto che questi abbiano o meno il neutro, se i terminali secondari sono aperti o chiusi sul
carico e infine dall’entità dell’eventuale carico connesso.
Pertanto, nell’ipotesi che si voglia determinare l’impedenza omopolare, al fine di valutare le
correnti di guasto nelle reti, tale impedenza deve essere determinata con riferimento a tutti gli
avvolgimenti connessi a reti esterne e dunque si avranno valori diversi per ogni configurazione considerata.
Avvolgimento con neutro non accessibile
Consideriamo un avvolgimento primario con il neutro non accessibile, per esempio a stella
senza il neutro (Fig.2.6). In questo caso, l’impedenza omopolare è praticamente infinita, infatti la tensione di alimentazione U applicata tra le fasi e la terra (non essendoci il neutro) fa circolare solo correnti capacitive molto piccole (I ≅ 0) che si richiudono a terra (correnti di dispersione). Analogamente per un avvolgimento a triangolo.
Fig.2.6 - Avvolgimenti con neutro non accessibile.
Avvolgimento con neutro accessibile
Se invece il primario ha il neutro accessibile, allora può circolare la corrente omopolare, che
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
16 - Prove e misure sulle macchine
però dipende anche dal tipo di avvolgimenti secondari. Per esempio (vedi Fig.2.7):
• Se gli avvolgimenti secondari sono a stella con neutro accessibile, vi possono circolare correnti omopolari, che richiamano correnti di reazione al primario: in tal caso l’impedenza
omopolare Z0 assume il ruolo è di impedenza dispersione.
• Se gli avvolgimenti secondari sono a stella senza neutro accessibile, le correnti secondarie
omopolari non possono circolare, e non si hanno nemmeno le correnti primarie di reazione:
in tal caso l’impedenza omopolare Z0 assume il ruolo di impedenza magnetizzante.
Fig.2.7 - Avvolgimenti con neutro accessibile e secondario a stella.
Infine, un ultimo esempio è dato dal trasformatore che ha il primario con il neutro accessibile,
mentre gli avvolgimenti secondari sono a triangolo.
In tal caso, possono circolare correnti omopolari IΔ negli avvolgimenti secondari a triangolo
(benché senza neutro), che richiamano correnti di reazione al primario. L’impedenza Z0 assume ancora il ruolo di impedenza di dispersione.
Notare, in questo esempio, che le correnti di sequenza zero IΔ possono circolare negli avvolgimenti secondari a triangolo, ma non nella linea a valle del triangolo.
Fig.2.8 - Avvolgimenti con neutro accessibile e secondario a triangolo.
3 - Prove sui motori asincroni
Il rendimento dei motori asincroni
Le applicazioni di motori elettrici nell’industria consumano tra il 30 % e il 40 % dell’energia
elettrica mondiale generata. Pertanto, il miglioramento del rendimento dell’intero azionamento elettrico (cioè il motore e i sistemi per la regolazione della velocità) è quindi di grande interesse per la riduzione dei consumi energetici.
Il potenziale risparmio complessivo di energia derivante da un sistema ottimale è stimato essere tra il 30 % e il 60 %.
Secondo stime in sede europea (2006), i motori elettrici con rendimento migliorato, in combinazione con i convertitori di frequenza, possono risparmiare circa il 7 % dell’intera energia
elettrica mondiale. Una frazione da un quarto ad un terzo di questo risparmio deriva
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Prove e misure sulle macchine - 17
dall’aumentato rendimento del motore. Il resto è il risultato dovuto ai miglioramenti sugli impianti.
La Norma IEC 60034-30 (2008) definisce le classi di rendimento standard per i motori asincroni trifasi a gabbia, armonizzando le differenze fra i prodotti dei diversi Costruttori nel mercato globale.
Le classi di rendimento sono denominate IE (International Efficiency):
• Rendimento Standard, Standard efficiency IE1
• Rendimento elevato, High efficiency IE2
• Rendimento Premium, Premium efficiency IE3
Successivamente, la Norma IEC 60034-30 (2010) ha definito un’ulteriore classe IE4 per macchine asincrone e sincrone.
Le macchine interessate dallo Standard sono quelle trifasi a 50 e 60 Hz per applicazioni di tipo: standard, hazardous area, marine, brake motors, con le seguenti caratteristiche:
• singola velocità a 2, 4 o 6 poli
• potenza nominale Pn da 0,75 a 375 kW
• tensione nominale Un fino a 1000 V
• servizio continuativo S1 o
• servizio intermittente periodico S3 con durata del ciclo maggiore dell’ 80 %
• possibilità di funzionare a 50 e 60 Hz.
I tempi per l’attuazione della normativa sono i seguenti:
• dal 16/06/2011: non sono consentiti motori con rendimento inferiore al livello IE2.
• dal 01/01/2015: per potenze nominali comprese fra 7,5 - 375 kW non saranno consentiti
rendimenti inferiori al livello IE3 o, se il livello di efficienza IE2 è soddisfatto, i motori
dovranno essere dotati di Inverter.
• dal 01/01/2017: Per potenze nominali comprese fra 0,75 - 375 kW non saranno consentiti
rendimenti inferiori al livello IE3 o, se il livello di efficienza IE2 è soddisfatto, i motori
dovranno essere dotati di Inverter.
Nella Fig.3.1 si riportano le diverse fasce di rendimento, secondo la Norma IEC 60034-30, al
variare della taglia dei motori, cioè della loro potenza nominale Pn (in kW).
Fig.3.1 - Fasce di rendimento secondo la Norma IEC 60034-30.
Rendimento in funzione del carico
Per un dato motore asincrono, con la sua potenza nominale Pn, il rendimento varia con la potenza meccanica utile Pu effettivamente erogata.
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
18 - Prove e misure sulle macchine
In particolare, a parità di potenza meccanica utile erogata Pu, minori sono le perdite, minore è
la potenza elettrica assorbita Pa, e pertanto migliore è il rendimento di funzionamento.
L’andamento tipico del rendimento al variare del carico meccanico applicato all’asse è riportato in Fig.3.2.
Il fattore di carico di un motore FC è il rapporto tra la potenza effettivamente resa Pu nelle attuali condizioni e la potenza nominale Pn.
Per un motore che lavora con basso fattore di carico FC, l’incidenza delle perdite è maggiore
e quindi il rendimento diminuisce rispetto alle condizioni nominali.
In pratica, un basso FC ed un basso rendimento non compromettono la funzionalità del servizio reso dal motore elettrico; semplicemente assorbono più energia del dovuto.
Pertanto, al fine di limitare gli sprechi, è necessario evitare il sovradimensionamento dei motori nelle installazioni.
Fig.3.2 - Rendimento tipico in funzione del carico.
Metodo di misura del rendimento
Il metodo di misurazione del rendimento nei motori asincroni trifasi in bassa tensione è stato
rielaborato con la nuova Norma IEC 60034-2-1 del 2007, Parte 2-1:
Metodi normalizzati per la determinazione, mediante prove, delle perdite e del rendimento (escluse le macchine per veicoli di trazione).
Questa Norma è stata recepita come CEI EN 60034-2-1 nel 2011 e ha sostituito la vecchia
Norma CEI EN 60034-2 del 1996. La nuova Norma prevede metodi di misura e condizioni di
prova molto più precisi ed accurati della precedente.
Si è rilevato che, per uno stesso motore, il rendimento misurato in conformità al nuovo metodo è inferiore di qualche punto percentuale rispetto a quello riscontrato utilizzando il vecchio
metodo.
L’incertezza
L’incertezza cui si fa riferimento nella Norma IEC 60034-2-1 è l’incertezza nella determinazione del rendimento reale e riflette le variazioni legate alla procedura di prova e alle apparecchiature utilizzate.
L’incertezza dovrebbe essere espressa come valore numerico, ma una tale prescrizione avrebbe bisogno di prove sufficienti a determinarne valori rappresentativi e confrontabili.
La Norma utilizza i seguenti livelli di incertezza relativa nella valutazione del rendimento:
• “bassa” si applica a determinazioni che si basano unicamente sui risultati di prova;
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Prove e misure sulle macchine - 19
• “media” si applica a determinazioni che si basano su approssimazioni limitate;
• “alta”
si applica a determinazioni che si basano su ipotesi o presunzioni.
Rendimento diretto
Per misurare il rendimento di un motore asincrono si utilizza il metodo diretto, portando la
macchina in diverse condizioni di carico, e misurando la potenza elettrica assorbita Pa e la potenza meccanica resa Pu.
Per eseguire le prove è necessario caricare la macchina con un freno, che applica la coppia
necessaria sull’albero. La prova richiede la misura della coppia meccanica utile Cm,u (Nm) e
della velocità di rotazione Nr (giri/min), per valutare la potenza meccanica utile Pu in watt:
Pu = Cm,u ⋅ ωr = Cm,u ⋅
2π
Nr
60
(3.1)
Il rendimento diretto si valuta con il rapporto:
η=
Pu
Pa
(3.2)
Per caricare meccanicamente il motore si usa un freno, spesso realizzato con un’altra macchina elettrica, collegato all’albero del motore e in grado di assorbire la potenza meccanica prodotta e trasformarla in altra forma, elettrica o termica.
Fig.3.3 - Prova al freno.
Un metodo relativamente semplice da utilizzare (soprattutto nei Laboratori dei Costruttori) è
quello che prevede la prova in opposizione meccanica.
Prova in opposizione meccanica
La prova in opposizione meccanica consiste nel collegare due macchine identiche sullo steso
albero: una funziona come motore e l’altra funziona come generatore (Fig.3.4).
Il motore a induzione assorbe la potenza trifase P1 (alla tensione V1 e frequenza f1 ), mentre i
terminali della macchina azionata (generatore a induzione) sono collegati a un gruppo di carico o ad un convertitore che assorbe la potenza attiva trifase P2 (alla tensione V2 e frequenza
f2), fornendo anche la potenza reattiva necessaria al generatore asincrono.
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
20 - Prove e misure sulle macchine
Fig.3.4 - Schema per la prova in opposizione meccanica.
La seconda macchina (il generatore) è collegata a una rete con frequenza f2 leggermente inferiore rispetto a quella della prima macchina f1 (per via dello scorrimento).
Per esempio:
f1 = 50 Hz (con velocità di sincronismo Nc = 1500 giri/min) e
f2 = 48 Hz (con velocità di sincronismo Nc = 1440 giri/min).
Fig.3.5 - Caratteristiche di coppia per le macchine in opposizione di fase.
In tal modo la velocità operativa all’albero è intermedia (per esempio Nr = 1470 giri/min) e
può esistere l’equilibrio fra la coppia prodotta dal motore e quella assorbita dal generatore
(vedi Fig.3.5). La tensione ai morsetti della seconda della seconda macchina V2 è inferiore alla
tensione V1 per mantenere costante il rapporto (V/f) e avere lo stesso flusso. In tal modo le due
macchine lavorano nelle stesse condizioni.
La potenza persa e il rendimento
Le perdite complessive delle due macchine Pp,tot sono valutate come differenza fra la potenza
elettrica in ingresso a una macchina P1 e la potenza elettrica erogata dall’altra P2:
Pd ,totali = P1 − P2
(3.3)
Poiché le macchine sono uguali e lavorano praticamente nelle stesse condizioni, la potenza
persa da ciascuna di esse si può ritenere la metà delle perdite totali:
Pd ,motore ≅ Pd , generatore ≅
Pd ,totali
2
=
P1 − P2
2
(3.4)
Analogamente, la potenza elettrica di ciascuna macchina (assorbita o erogata) si può considerare la media delle potenze elettriche:
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Prove e misure sulle macchine - 21
Pel ,motore ≅ Pel , generatore ≅
P1 + P2
2
(3.5)
In definitiva il rendimento di ciascuna macchina si può stimare nella forma:
η ≅1−
Pd
(P − P ) / 2
2 P2
=1− 1 2
=
Pel
( P1 + P2 ) / 2 P1 + P2
(3.6)
Le grandezze P1 e P2 che compaiono nell’espressione del rendimento sono quantità elettriche.
Se le potenze elettriche P1 e P2 sono misurate con lo stesso errore relativo εP, l’errore assoluto
nella misura del rendimento (nel caso peggiore, per semplificare gli sviluppi) è:
Eη =
∂η
∂η
− 2 P2
2( P1 + P2 ) − 2 P2
EP1 +
EP2 =
ε P +
ε P P2 =
2 P 1
∂P1
∂P2
( P1 + P2 )
( P1 + P2 )2
= εP
− 2 P1P2 + 2 P1P2
( P1 + P2 )2
4 P1P2
= εP
( P1 + P2 )2
(3.7)
L’errore relativo risulta invece:
εη =
Eη
η
= εP
2 P1
( P1 + P2 )
(3.8)
Ripartizione delle perdite
In generale, in un motore asincrono, la potenza totale assorbita Pa si trasforma man mano che
(in un ideale percorso) attraversa la macchina passando nello statore, nel traferro Ps,r, nel rotore, per essere poi resa sull’albero, sotto forma di potenza meccanica utile Pu in termini di coppia e velocità (vedi la Fig.3.6).
Fig.3.6 - Schema per le perdite del motore.
In tutti questi passaggi si manifestano delle perdite che possono essere dettagliate con
l’espressione seguente, valida in generale:
Pa = Pu + ∑ Ppi = PFe + PCu , s + PJ , r + Pf , w + Padd + Pu
(3.9)
Nella relazione precedente e nella Fig.3.6, le perdite hanno il seguente significato:
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
22 - Prove e misure sulle macchine
PFe
PCu,s
Ps,r
PJ,r
Pf,w
Padd
sono le perdite nel ferro, nel circuito magnetico che interessa lo statore e il rotore,
sono le perdite negli avvolgimenti in rame (Cu) di statore,
è la potenza trasferita dallo statore al rotore,
sono le perdite per effetto Joule nei conduttori di rotore,
è la potenza meccanica persa per attriti (friction) e ventilazione (windage),
sono le perdite addizionali.
Dunque si valuta il rendimento:
η=
Pu
∑ Ppi
=1−
Pa
Pa
(3.10)
Le prove secondo la Norma IEC 60034-2-1
La Norma IEC 60034-2-1 (2007) indica le modalità di prova per la valutazione del rendimento. Le perdite totali PT (total losses) sono la differenza tra la potenza elettrica assorbita Pa e la
potenza meccanica resa Pu.
PT = ∑ Pp = Pa − Pu = PK + PL + PLL
(3.11)
Le perdite totali PT corrispondono alla somma:
• delle perdite costanti PK
• delle perdite a carico PL e
• delle perdite addizionali a carico PLL:
Fig.3.7 - Schema per le perdite del motore.
Le perdite costanti PK (constant losses) sono indipendenti dal carico e corrispondono alla
somma delle perdite nel ferro PFe e delle perdite meccaniche per attrito (friction) e per ventilazione (windage) Pf,w:
PK = PFe + Pf , w
(3.12)
Le perdite variabili con il carico PL (load losses) sono le perdite del tipo I2R negli avvolgimenti di statore PCu,s e di rotore PJ,r:
PL = PCu,s + PJ ,r
(3.13)
Le perdite addizionali a carico PLL (additional load losses) o perdite parassite a carico (stray
load losses) sono dette anche perdite supplementari o residue e hanno diverse cause.
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Prove e misure sulle macchine - 23
Le perdite addizionali
Le perdite addizionali sono difficili da misurare accuratamente o anche da calcolare con modelli. Fra i diversi fenomeni che contribuiscono alle perdite addizionali a carico PLL possiamo
individuare: le ulteriori perdite di tipo magnetico e di tipo e I2R, dovute ai flussi dispersi e alle
correnti parassite che interessano sia le parti in ferro che le altre parti metalliche, esclusi i
conduttori, l’addensamento delle correnti superficiali e gli effetti pellicolari, le correnti interbarre e le cave aperte, le armoniche in alta frequenza dei flussi e delle correnti nei denti dei
lamierini di statore e di rotore.
Tipicamente le perdite addizionali crescono al crescere della corrente assorbita e, analogamente al caso dei trasformatori, si possono ritenere proporzionali al quadrato della corrente, o
della coppia sviluppata dalla macchina.
Infatti la coppia e la corrente sono due grandezze fra loro proporzionali, per ogni condizione
di funzionamento, almeno finché le scorrimento rimane piccolo.
Nelle prove a vuoto, la perdite addizionali sono molto piccole e si ritengono trascurabili.
Poiché la misura o la determinazione delle perdite addizionali risulta difficile, la vecchia
Norma EN 60034-2 (1996) prevedeva di valutare le perdite addizionali Padd in modo convenzionale, assumendo che fossero pari allo 0,5 % della potenza assorbita Pa.
La nuova Norma, viceversa, prevede che le perdite addizionali siano valutate in occasione
delle prove a carico, per ciascun punto di funzionamento (25%, 50%, 75%, 100%, 115% e
125% del carico nominale).
Per la determinazione delle perdite addizionali o residue, vedremo che è prevista una interpolazione, basata sulla regressione lineare, per ottenere la retta che si avvicina maggiormente ai
punti sperimentali.
Misura della resistenza degli avvolgimenti
La misura delle resistenze degli avvolgimenti di statore è necessaria per stabilire le perdite per
effetto Joule di statore ed è fatta in corrente continua, fra due morsetti di linea.
La resistenza di un avvolgimento si ottiene dalle misure fatte fra due morsetti, mediante le seguenti relazioni, valide a seconda che gli avvolgimenti della macchina siano collegati a triangolo oppure a stella (vedi Fig.3.8):
triangolo:
2
V12
V
= RΔ // 2 RΔ = RΔ ; stella : 12 = 2 RY
3
I1
I1
(3.14)
Fig.3.8 - Schemi per la misura della resistenza degli avvolgimenti.
La resistenza degli avvolgimenti viene assunta come media delle tre misure fatte sulle tre
coppie di morsetti.
Per quanto riguarda il circuito equivalente del motore asincrono, il modello di riferimento per
gli avvolgimenti di statore è a stella. Pertanto si assume la resistenza equivalente di statore:
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
24 - Prove e misure sulle macchine
Rs = RY =
1 V12
2 I1
(3.15)
In tal caso, misurata la corrente di linea assorbita dallo statore Is, si possono valutare le perdite
complessive nel rame (Cu) di statore per le tre fasi:
PCu, s = 3Rs I s2
(3.16)
Prove a vuoto
Nel seguito indicheremo con Va la tensione concatenata di alimentazione del motore, mentre
la tensione di alimentazione del circuito equivalente per una fase è la tensione stellata, pari a
V1a = Va/√3. Con riferimento al circuito equivalente per fase, abbiamo indicato con (Rs e Xs)
la resistenza e la reattanza di statore e con (R’r e X’r) la resistenza e la reattanza di rotore riportate allo lo statore; (R0 e X0) sono i componenti del ramo magnetizzante (vedi la Fig.3.9).
Nelle prove a vuoto si alimenta lo statore con una terna simmetrica di tensioni alla frequenza
nominale fn. La tensione di alimentazione Va ha diversi valori, nelle diverse prove a vuoto, fra
i quali quello nominale Vn.
Fig.3.9 - Schema per le prove a vuoto.
In assenza di carico meccanico applicato all’albero, il motore si porta a una velocità maggiore
di quella nominale Nn e leggermente inferiore a quella di sincronismo Nc e lo scorrimento è
praticamente nullo (s ≅ 0).
Nelle prove a vuoto si misurano la corrente di statore I0 e la potenza trifase assorbita Pa0.
Nelle prove a vuoto si possono ritenere trascurabili le perdite addizionali e le perdite nei conduttori di rotore.
Quindi la potenza trifase assorbita Pa0 corrisponde alle perdite negli avvolgimenti di statore,
alle perdite nel ferro PFe e alle perdite meccaniche per attrito e ventilazione Pf,w:
Pa 0 = 3P10 = PFe + PCu , s 0 + Pf , w
(3.17)
Da cui si ricava la somma delle perdite nel ferro PFe e di quelle meccaniche Pf,w:
PFe + Pf , w = Pa 0 − 3 Rs I 02
(3.18)
Le perdite meccaniche Pf,w misurate nella prova a vuoto sono quelle che si avranno anche a
carico, dal momento che la velocità di rotazione Nr è praticamente la stessa.
Inoltre, le perdite nel ferro PFe dipendono dalla tensione di alimentazione Va.
In particolare, per le tre fasi complessivamente potremo scrivere:
PFe = 3
V12a
R0
Misure sui Sistemi di Potenza
(3.19)
© 2014, Nicola Locci
Prove e misure sulle macchine - 25
Notiamo che le perdite nel ferro si riferiscono quasi esclusivamente allo statore.
Infatti le perdite nel ferro dipendono dall’induzione magnetica e dalla frequenza.
D’altra parte la frequenza rotorica è fr = sf e lo scorrimento s è molto piccolo (< 10 % nel funzionamento ordinario e ancora meno nel funzionamento a vuoto).
Pertanto si possono trascurare le perdite nel ferro di rotore PFe,r ≅ 0 e ritenere che tutte le perdite nel ferro si abbiano allo statore: PFe ≅ PFe,s.
Nelle prove a vuoto si trascurano anche le perdite per effetto Joule negli avvolgimenti di rotore, essendo lo scorrimento molto piccolo e dunque essendo di piccola entità tutti i fenomeni
legati all’induzione, come le correnti del rotore.
Prove a vuoto a tensione variabile
Con una prova a vuoto, si può determinare complessivamente la somma delle perdite nel ferro
PFe e di quelle meccaniche Pf,w.
Con una serie di prove a vuoto, a tensione di alimentazione Va variabile, si possono separare
questi due contributi di perdite.
Infatti, se la variazione della tensione applicata è tale che la velocità di rotazione Nr della
macchina non vari troppo rispetto a quella nominale, allora non variano troppo neanche le
perdite meccaniche Pf,w che dipendono dalla velocità.
D’altra parte (ricordando il circuito equivalente della macchina e il significato del ramo magnetizzante in derivazione), le perdite nel ferro PFe dipendono solo dal quadrato dalla tensione
Va di alimentazione, se la frequenza rimane costante (è pari al valore nominale fn).
Pertanto, eseguendo più prove a tensione variabile e misurando le potenze e le correnti assorbite, potremo riportare in un grafico i valori della somma (PFe + Pf,w) in funzione del quadrato
della tensione di alimentazione Va (vedi Fig.3.10).
I punti di misura sono praticamente allineati su una retta che, estrapolata sull’origine consente
di determinare l’intercetta che rappresenta il valore delle perdite meccaniche Pf,w.
Fig.3.10 - Separazione delle perdite a vuoto del motore.
Nell’eseguire queste prove, come già detto, la tensione di alimentazione Va non deve variare
troppo, per evitare che il motore rallenti eccessivamente. Infatti ricordiamo che la coppia
meccanica prodotta Cm dipende anch’essa dal quadrato della tensione di alimentazione Va
mentre la caratteristica della coppia resistente Cr dovuta all’attrito dei cuscinetti e alle perdite
per ventilazione ha un andamento di tipo quadratico con la velocità di rotazione Nr.
Per chiarire il fenomeno, nella Fig.3.10 è stato riportato un insieme di caratteristiche di coppia
motrice (Cm Nr) al variare della tensione applicata Va e la caratteristica della coppia resistente
(Cr Nr). Benché la macchina sia a vuoto, la riduzione di coppia motrice Cm con la tensione potrebbe essere tale che l’equilibrio della coppia motrice Cm con quella resistente Cr si verifichi
per valori di velocità eccessivamente minori di quello nominale e in definitiva con valori eccessivi di scorrimento. Allora non è più vero che sono costanti le perdite meccaniche.
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
26 - Prove e misure sulle macchine
Secondo la Norma, per la separazione delle perdite nel ferro PFe e meccaniche Pf,w è previsto un
numero minimo di sette misure a vuoto.
Inoltre i valori di tensione, inclusa la tensione nominale Vn, devono essere tali che: quattro o più
valori siano rilevati a intervalli circa uguali, compresi tra 125 % e 60 % della tensione nominale
Vn, per esempio (120, 100, 80, 60 %); tre o più valori siano rilevati a intervalli circa uguali,
compresi tra 50 % e 20 % della tensione nominale.
Le prove a vuoto dovrebbero essere condotte dopo le prove a carico quando è stato raggiunto il
regime termico.
Prove a carico
Secondo la Norma, le prove a carico devono prevedere almeno sei diversi punti di funzionamento:
• Quattro punti di carico dovrebbero essere scelti in modo da essere distribuiti tra non meno
del 25 % e fino al 100 % incluso del carico nominale (per es. 25 % 50 % 75 % 100 %).
• Gli ultimi due punti di carico dovrebbero essere scelti al di sopra del 100 % e non oltre il
150 % del carico nominale (per es. 120 % e 140 %).
Per le prove a carico, si deve iniziare dal valore di carico più elevato e procedere verso il più
basso. Prima di iniziare a rilevare i dati per queste prove, la temperatura degli avvolgimenti
deve essere entro 5 K rispetto alla temperatura nominale θn, ottenuta dalla prova di riscaldamento a carico nominale.
Per ciascuno dei sei punti delle prove a carico variabile, occorre misurare e registrare:
la coppia meccanica utile erogata
• Cm,u (Nm)
la potenza elettrica trifase assorbita
• Pa (W)
(A)
la corrente media di statore
• Is
• Nr (giri/min) la velocità di rotazione
(°C)
la temperatura media degli avvolgimenti
• θ
(°C)
la temperatura ambiente
• θa
la tensione di alimentazione media ai morsetti
• Va (V)
Queste prove devono essere effettuate il più velocemente possibile per ridurre al minimo le
variazioni di temperatura nella macchina durante le prove.
Oltre che per valutare il rendimento in forma diretta, le prove a carico sono indispensabili per
valutare le perdite addizionali Padd.
Potenza trasferita dallo statore al rotore
Nei motori a gabbia, i conduttori di rotore non sono accessibili e le perdite per effetto Joule
nei conduttori di rotore PJ,r si possono determinare solo per via indiretta.
Infatti, se Pa è la potenza elettrica assorbita, la potenza trasferita dallo statore al rotore Ps,r è in
parte dissipata nei conduttori di rotore PJ,r e in parte trasformata in potenza meccanica Pm (potenza utile più perdite meccaniche).
Si procede quindi a misurare la potenza assorbita Pa e la corrente di statore Is:
In tali condizioni risulta:
Pa = ( PFe + PCu , s ) + Ps , r
⇒ Ps , r = Pa − ( PFe + PCu , s ) = PJ , r + Pm
(3.20)
Dunque si può ricavare indirettamente la potenza Ps,r trasferita dallo statore al rotore.
Dove la potenza meccanica sull’asse Pm è la somma delle perdite meccaniche Pf,w e della potenza utile Pu:
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Prove e misure sulle macchine - 27
Pm = Pf , w + Pu
(3.21)
Per valutare la potenza persa nei conduttori di rotore PJ,r consideriamo il circuito equivalente
per fase di Fig.3.11, dove abbiamo indicato con I’r la corrente di rotore riportata allo statore e
con (R’r e X’r) la resistenza e la reattanza di rotore riportate allo statore.
Fig.3.11 - Circuito equivalente per fase del motore asincrono.
Le potenze indicate sono 1/3 di quelle totali.
Notare che nella figura tutte le potenze indicate sono in realtà pari a 1/3 di quelle totali, essendo il circuito equivalente riferito a una sola delle tre fasi del motore.
Dunque, se consideriamo la macchina trifase nel suo complesso, la potenza Ps,r trasferita dallo
statore al rotore risulta:
Ps , r = 3
R 'r 2
1− s 2
I 'r = 3R 'r I '2r +3R 'r
I 'r = PJ , r + Pm
s
s
(3.22)
Allora la potenza globalmente persa nei conduttori di rotore PJ,r può essere valutata dalle misure già fatte. Infatti si ha:
PJ ,r = 3R'r I '2r = s ⋅ Ps,r = s ⋅ [ Pa − ( PFe + PCu, s )]
(3.23)
Dove rimane da misurare solo lo scorrimento “s”.
Valutazione delle perdite addizionali
Per determinare le perdite addizionali Padd in ciascuna delle prove a carico si valuta la potenza
residua:
Padd = Pa − PFe − PCu , s − PJ , r − Pf , w − Pu
(3.24)
Si riportano i punti sperimentali in funzione del quadrato della coppia meccanica utile Cm,u.
I dati delle perdite addizionali Padd sono trattati utilizzando l’analisi di regressione lineare,
ammettendo che le perdite addizionali Padd siano una funzione lineare del quadrato della coppia meccanica utile Cm,u:
Padd = ACm2 ,u + B
© 2014, Nicola Locci
(3.25)
Misure sui Sistemi di Potenza
28 - Prove e misure sulle macchine
Fig.3.12 - Regressione lineare per le perdite addizionali.
Trattamento dei dati sperimentali
Si è detto che bisogna considerare almeno sei punti di carico.
Indicando con xi i valori del quadrato della coppia meccanica utile (Cm,u) e con yi i valori delle
perdite addizionali (Padd), avremo:
yi = Axi + B
(3.26)
La costante A si determina con l’espressione:
A=
1
N
⎛1
∑ xi yi − ⎜⎜ N
i =1
⎝
N
⎞⎛ 1 N ⎞
x
∑ i ⎟⎟⎜⎜ N ∑ yi ⎟⎟
i =1
⎠⎝ i =1 ⎠
2
1 N 2 ⎛1 N ⎞
∑ xi − ⎜⎜ N ∑ xi ⎟⎟
N i =1
⎝ i =1 ⎠
N
(3.27)
Mentre B risulta:
1
x=
N
B = y − Ax ;
N
∑ xi
i=1
e
1
y=
N
N
∑ yi
(3.28)
i=1
In tal modo si ottiene la retta che si avvicina maggiormente ai punti di misura secondo il metodo dei minimi quadrati.
La determinazione è accettabile quando si ottiene un coefficiente di correlazione γ maggiore o
uguale a 0,95:
γ=
δ xy
δ2x
⋅
δ2y
=
1
N
1
N
N
∑ ( xi − x ) ⋅ ( yi − y )
i =1
1
∑ ( xi − x )2 ⋅ N
i =1
N
N
(3.29)
∑ ( yi − y )2
i =1
Nota
Per valutare le perdite addizionali Padd si fanno misure di potenze in ingresso Pa e in uscita Pu
per stabilire l’entità delle potenze perse, che sono quantità molto più piccole.
Dunque questa tecnica è fortemente limitata dalle incertezze di misura ed è sensibile
all’effettivo rendimento della macchina.
Chiaramente ciò costituisce un problema, ma questa tecnica è preferibile all’alternativa di assegnare un valore predefinito alle perdite addizionali come percentuale della potenza assorbita, perché tiene conto di come realmente è fatta la singola macchina.
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Prove e misure sulle macchine - 29
Il rendimento del motore
In definitiva, la potenza totale Pa assorbita dal motore è stata ripartita in tutte le sue componenti:
Pa = PFe + PCu , s + PJ , r + Pf , w + Pu + Padd
(3.30)
Il totale delle perdite ammonta a:
∑ Ppi = Pa − Pu
(3.31)
Il rendimento è:
ηc =
Pu
∑ Ppi
=1−
Pa
Pa
(3.32)
4 - Misura dei parametri del circuito equivalente
Misura dei parametri del circuito equivalente
I circuiti equivalenti dei motori sono usati nel controllo degli azionamenti elettrici, dove i parametri del motore sono necessari per implementare gli algoritmi di controllo.
Il circuito equivalente di un motore asincrono (riportato allo statore, Fig.4.1) si riferisce a una
fase del collegamento a stella e i parametri si possono in parte ricavare da prove a vuoto (s ≅
0) e a rotore bloccato (s = 1). Finché la macchina ha un basso grado di saturazione i parametri
del circuito equivalente si possono ritenere costanti.
La norma di riferimento è la IEC 60034-28 del 2012: “Rotating electrical machines - Part 28:
Test methods for determining quantities of equivalent circuit diagrams for three-phase lowvoltage cage induction motors”, recepita dal CEI nel 2014.
Fig.4.1 - Circuito equivalente per una fase del motore asincrono.
La prova a rotore bloccato
La prova a rotore bloccato si prepara vincolando meccanicamente l’albero del rotore (attraverso un giunto) direttamente sullo statore.
La prova a rotore bloccato (Nr = 0) e (s = 1) equivale alla prova in corto circuito del trasformatore e si esegue applicando al motore una tensione di alimentazione variabile (per esempio
con un variac trifase). Si fanno almeno 10 prove, facendo circolare una corrente Icc dal 10 %
fino al 150 % del valore nominale In.
Nel circuito equivalente del motore (vedi Fig.4.2) si può trascurare l’impedenza Z0 del ramo
magnetizzante e rimangono solo le impedenza dei rami di statore (Rs Xs) e di rotore (R’r X’r).
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
30 - Prove e misure sulle macchine
Fig.4.2 - Circuito equivalente per la prova a rotore bloccato.
Indicando con Va = Vcc la tensione concatenata di alimentazione, la tensione di fase è
V1a = Vcc/√3 e l’impedenza totale in serie di una fase è:
Z cc =
V1a
V
= cc = ( Rs + R 'r ) + j ( X s + X 'r )
I cc
3I cc
(4.1)
Misurando la potenza trifase attiva Pcc = 3P1cc e quella reattiva Qcc = 3Q1cc risulta:
2
Rcc = Rs + R ' r = P1cc / I cc
e
2
X cc = X s + X ' r = Q1cc / I cc
(4.2)
Poiché l’impedenza di corto circuito Zcc è formata da reattanze di dispersione, rimane relativamente costante con la corrente, finché la macchina non ha apprezzabile saturazione e vale il
modello che stiamo utilizzando.
In particolare, con la macchina in corto circuito viene assorbita una corrente pari al valore
nominale In quando è applicata una tensione Vcc,n = √3ZccIn.
Dunque, quando la macchina è alimentata alla tensione nominale Vn, si può valutare con una
certa approssimazione la corrente di spunto in modo proporzione della corrente nominale In:
I spunto,n =
Vn
V
= n In
3Z cc Vcc ,n
(4.3)
Prove a vuoto
La prova a vuoto (Nr = Nc) e (s ≅ 0) si predispone togliendo ogni carico meccanico, ed equivale alla prova a vuoto del trasformatore. Si fanno almeno 10 prove applicando al motore una
tensione Va variabile dal 20 % fino ad almeno il 120 % della tensione nominale Vn.
Fig.4.3 - Circuito equivalente per la prova a vuoto.
La tensione massima di alimentazione Va può arrivare fino a un valore che (sempre a vuoto)
fa circolare una corrente magnetizzante I0 non superiore al 150 % del valore nominale In (con
saturazione). Il circuito equivalente di rotore risulta aperto (Fig.4.3).
Indicando con Va = V0 la tensione concatenata di alimentazione, la tensione stellata è V1a =
V0/√3) e l’impedenza totale a vuoto è:
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Prove e misure sulle macchine - 31
Z0 =
V1a
V
= 0 = ( Rs + jX s ) + ( R0 // jX 0 )
I0
3I 0
(4.4)
Se la resistenza R0 del ramo magnetizzante è molto maggiore della reattanza X0, il parallelo si
semplifica e la reattanza totale di statore Xs,tot è pari alla somma della reattanza di dispersione
dell’avvolgimento Xs e della reattanza di mutua induzione del ramo magnetizzante X0.
Misurando anche la potenza reattiva trifase Q0 = 3Q10 avremo:
X s ,tot = X s + X 0 = Q10 / I 02
(4.5)
Queste prove non consentono di scorporare tutti gli elementi del circuito equivalente.
Le prove si possono integrare con informazioni di progetto, che possono essere date dal Costruttore. Per esempio è utile il rapporto kσ fra le reattanze di dispersione di statore Xs e di rotore riportata allo statore X’r (o le induttanze corrispondenti):
kσ =
Xs
L
= s
X 'r L'r
(4.6)
Allora, la reattanza totale di corto circuito (s ≅ 1) è:
X cc = X s + X ' r = X s (1 +
1
2
) = Q1cc / I cc
kσ
(4.7)
Dunque dalla prova in corto circuito si possono determinare le reattanze di dispersione, totale
Xcc di statore Xs e di rotore X’r.
In prima approssimazione si può ritenere che kσ = 1 per i motori standard a gabbia e kσ = 0,67
per i motori a doppia gabbia.
Nella prova a vuoto (s ≅ 0) potremo determinare la reattanza totale di statore:
X s , tot = X s + X 0 = Q10 / I 02
(4.8)
Da cui si ricava la reattanza del ramo magnetizzante X0:
X 0 = X s ,tot − X s = X s ,tot −
X cc
1 + 1 / kσ
(4.9)
La reattanza del ramo magnetizzante X0 è fortemente non lineare con la tensione applicata (e
quindi con la corrente assorbita I0. In Fig.4.4 si mostra un andamento tipico per la reattanza X0
del ramo magnetizzante (o per l’induttanza L0). Per maggiori dettagli vedi la Norma IEC.
Fig.4.4 - Reattanza tipica del ramo magnetizzante.
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
32 - Prove e misure sulle macchine
5 - Misure meccaniche sui motori
Le prove sui motori asincroni richiedono, oltre alle misure elettriche, anche misure di quantità
meccaniche. In particolare sono sempre necessarie misure di coppia meccanica Cm [Nm] e
misure di velocità di rotazione Nr [giri/min]. Le misure di coppia e di velocità consentono di
valutare la potenza meccanica utile Pu resa sull’albero.
Sono anche necessarie valutazioni dello scorrimento, nelle diverse condizioni, per determinare la potenza dissipata per effetto Joule nei circuiti di rotore PJ,r.
Nel seguito consideriamo le misure di coppia mediante torsiometri con estensimetri, le misure
di velocità di rotazione mediante encoder ottici e le misure di scorrimento mediante metodi
stroboscopici.
1 - Misure di coppia
Per misurare la coppia meccanica sviluppata dal motore si impiegano i torsiometri (Fig.5.1).
Spesso i trasduttori di coppia sono abbinati anche ai trasduttori di velocità di rotazione, in
un’unica apparecchiature che si monta sull’albero fra il motore in prova e il freno.
In alcuni casi può essere necessario interporre dei dischi di accoppiamento per compensare i
disallineamenti degli alberi.
I torsiometri si basano su diversi principi di funzionamento: i più diffusi impiegano sensori
piezoelettrici o estensimetrici.
Fig.5.1 - Misuratore di coppia e dischi di allineamento degli alberi.
Gli estensimetri
Gli estensimetri (strain gauge) sono dei sottili fili metallici con un diametro dell’ordine dei 50
μm, fatti con leghe metalliche come per esempio la manganina (84% Cu, 12% Mn, 4% Ni),
vedi Fig.5.2.
Fig.5.2 - Estensimetri.
La resistenza elettrica R del filo metallico varia con la deformazione subita (strain).
In particolare la variazione relativa di resistenza (δR/R) è proporzionale alla variazione relativa di lunghezza l del filo, cioè la deformazione (ε = δl/l), con un coefficiente di proporzionalità detto gauge factor KG:
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Prove e misure sulle macchine - 33
δR
δl
= KG
= KG ε
R
l
(5.1)
Il campo elastico
Consideriamo un provino metallico (per esempio in acciaio) di sezione A e lunghezza utile L,
sottoposto a uno forza F di trazione assiale (vedi Fig.5.3). Nella sezione A si ha uno sforzo σ
al quale corrisponde una deformazione ε.
Nel funzionamento in campo elastico vale la legge di Hooke che lega in modo proporzionale
lo sforzo σ e la deformazione ε tramite il modulo di elasticità Eel del materiale:
σ = Eel ε
dove: σ =
F
δ L δl
, ε=
=
A
L
l
(5.2)
Poiché l’estensimetro è incollato solidamente con resine epossidiche sul provino in acciaio,
l’allungamento relativo dell’estensimetro (δl/l) è uguale all’allungamento relativo del provino
(δL/L).
Fig.5.3 - Estensimetro montato su un’asta sottoposta a trazione.
Il diagramma sforzo-deformazione (σ-ε) di un materiale rappresenta le sue condizioni al variare dello stato di sforzo applicato (vedi Fig.5.4).
Per gli acciai il diagramma sforzo-deformazione ha un andamento inizialmente lineare che
corrisponde al funzionamento in campo elastico e alla legge Hooke. L’applicazione di uno
sforzo in tale campo non lascia deformazioni permanenti nel materiale, quando lo sforzo viene riportato a zero.
Aumentando ancora lo sforzo, fino al valore σsn, il materiale inizia a presentare il fenomeno
dello “snervamento”: cioè, quando si riporta a zero lo sforzo, rimangono delle deformazioni
permanenti. Dopo lo snervamento, il materiale indebolisce la sua resistenza.
Fig.5.4 - Diagramma sforzo-deformazione di un acciaio.
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
34 - Prove e misure sulle macchine
Oltre la zona di snervamento, le deformazioni subite dall’acciaio sono irreversibili e consistenti. Il materiale non è più utilizzabile come elemento resistente.
Se, proseguendo la prova, si aumenta ancora lo sforzo σ applicato e le conseguenti deformazioni ε, il provino giunge al punto di rottura. In una prova di trazione, la rottura avviene dopo
che il provino in acciaio si è notevolmente allungato (ε >>) e inoltre la sua sezione si è ristretta. L’allungamento a rottura di un acciaio è molto maggiore degli allungamenti che si registrano in campo elastico.
Le celle di carico
Le celle di carico sono sistemi per la misura delle forze e si impiegano tipicamente nelle bilance elettroniche.
Le celle di carico si costruiscono montando uno o più estensimetri su una struttura metallica
di cui sia noto il modulo di elasticità Eel, che abbia una geometria nota e che lavori rigorosamente in campo elastico. In tal modo si può determinare la forza F applicata alla cella di carico, misurando le variazioni di resistenza δR. Infatti risulta:
F = σA = Eel εA = Eel
δl
E A δR
A = el ⋅
l
KG R
(5.3)
I torsiometri
Negli alberi sottoposti a torsione, il momento torcente Cm determina stati di sforzo di trazione
e di compressione (±σ) lungo linee elicoidali disposte a 45° rispetto all’asse dell’albero.
Gli sforzi sono proporzionali alla coppia applicata Cm (con un coefficiente Km che tiene conto
delle dimensioni e del materiale dell’albero),vedi la Fig.5.5. I fili degli estensimetri sono orientati secondo queste linee di forza.
In particolare, con il verso in figura per il momento torcente applicato Cm, le fibre sotto
l’estensimetro 1 sono tese e si allungano (+ε) mentre le fibre sotto l’estensimetro 2 sono compresse e si accorciano (-ε). Nel funzionamento in campo elastico, gli stati di sforzo (±σ)
nell’acciaio sono proporzionali alle deformazioni (±ε) secondo il modulo di elasticità Kel
dell’acciaio. Dunque risulta:
σ = K m Cm = Eel ε
(5.4)
Fig.5.5 - Principio di funzionamento di un torsiometro.
Gli sforzi di torsione e le conseguenti sollecitazioni di trazione e di compressione (±σ) producono deformazioni superficiali sull’albero che sono uguali e di segno opposto (±ε).
Le deformazioni superficiali dell’albero sono applicate anche agli estensimetri che su di esso
sono saldamente vincolati.
Così gli estensimetri, subendo deformazioni uguali ed opposte, hanno anche variazioni uguali
ed opposte delle loro resistenze: (R + dR) per le fibre tese e (R - dR) per le fibre compresse.
Usualmente, per migliorare la sensibilità e la linearità, si montano sull’albero quattro estensiMisure sui Sistemi di Potenza
© 2014, Nicola Locci
Prove e misure sulle macchine - 35
metri come nella vedi Fig.5.6).
Fig.5.6 - Montaggio degli estensimetri a ponte di Wheatstone (full-bridge).
Per rivelare le variazioni delle resistenze, si impiega un ponte di Wheatstone (full-bridge),
contenente quattro estensimetri uguali, con variazioni positive e negative della resistenza R.
Il ponte è alimentato da una tensione E fra i morsetti C e D e produce una tensione V fra i
morsetti A e B, proporzionale alle variazioni di resistenza (δR/R) e alla tensione E:
V = V AD − VBD =
E
δR
[( R + δR ) − ( R − δR )] = E
R
2R
(5.5)
In definitiva, la tensione V è proporzionale alla coppia applicata Cm con un coefficiente complessivo K:
V =E
δR
K
= EK G ε = EK G m Cm = KC m
R
Eel
(5.6)
Poiché l’albero gira è necessario trovare un modo per alimentare il ponte con la tensione E e
prelevare da esso il segnale di tensione V proporzionale alle variazioni di resistenza (δR/R) e
dunque alla coppia Cm.
Esistono metodi a contatti striscianti e metodi senza contatto, più pratici.
Nel secondo caso, l’alimentazione del ponte è portata al rotore per mezzo di un accoppiamento induttivo. In sostanza, un avvolgimento fisso sullo statore è alimentato in corrente continua
e un avvolgimento rotante solidale con l’albero è sede di tensioni indotte, da utilizzare direttamente o previo raddrizzamento per alimentare il ponte.
Tecniche analoghe di accoppiamento si possono impiegare anche per esportare la tensione V
in uscita dal ponte. In Fig.5.7 si mostra uno schema per l’accoppiamento magnetico fra i circuiti di rotore e di statore.
Fig.5.7 - Modulo di alimentazione e trasmissione.
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
36 - Prove e misure sulle macchine
La tensione V in uscita dal ponte, essendo flottante, è prelevata da un amplificatore per strumentazione. Inoltre, per una migliore immunità ai disturbi, il segnale è trasmesso direttamente
in forma digitale (vedi il convertitore analogico-digitale ADC).
2 - Misure di velocità
Per la misura della velocità di rotazione Nr del motore si può impiegare un encoder ottico.
Nell’encoder si trova un diodo LED (Light Emitting Diode) che emette luce. La luce viene
collimata in un fascio parallelo per mezzo di una lente in policarbonato.
La luce passa attraverso un disco forato che ruota con l’albero e viene intercettata da uno o
più fotorivelatori (vedi Fig.5.8). Il raggio luminoso arriva (oppure no) ai rivelatori se non viene interrotto dagli spazi pieni del disco che ruota. I fotorivelatori fanno capo a circuiti di signal processing in modo da produrre un segnale digitale.
Fig.5.8 - Encoder ottico.
Gli impulsi provenienti dall’encoder sono contati per mezzo di un contatore digitale, in un
prefissato intervallo di tempo, con le tecniche già viste nel corso di Misure Elettriche ed Elettroniche. Se l’encoder fornisce per ogni giro un numero di impulsi Ngiro e il numero di impulsi
contati in un tempo T (in secondi) è pari a Ncont allora la velocità media di rotazione Nr nel
tempo di conteggio T è:
Nr =
N cont 1
N giro T
[
giri
]
s
(5.7)
La risoluzione dell’encoder è determinata dal numero di spazi chiusi e aperti nel disco.
Per esempio: se Ngiro = 360 impulsi/giro e il tempo di conteggio è T = 1 s, la velocità di rotazione in giri/min è:
N r = 60
N cont
giri
[
]
360 ⋅ 1 min
(5.8)
Gli encoder che misurano la velocità angolare media tramite il conteggio di impulsi sono detti
“incrementali”. Normalmente, i circuiti di signal processing del circuito integrato, trasformano le configurazioni dei raggi luminosi sui fotorivelatori in segnali rettangolari digitali su due
canali A e B fra loro in quadratura. Ciò consente di individuare il verso di rotazione
dell’albero. Infatti, se per esempio con la rotazione oraria il canale B è in ritardo su A, allora
quando la rotazione è antioraria, il canale B sarà in anticipo sul canale A (vedi Fig.5.8).
Encoder assoluti
Alcuni tipo di encoder possono rappresentare anche la posizione angolare assoluta, grazie alla
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Prove e misure sulle macchine - 37
codifica che si sviluppa sulla direzione radiale (Fig.5.9). Questi encoder sono detti encoder
“assoluti”; sono più complessi degli encoder incrementali, ma sono anche trasduttori di posizione angolare e inoltre mantengono l’informazione sulla posizione angolare anche dopo che
vengono spenti.
Fig.5.9 - Encoder assoluto.
3 - Misure di scorrimento
Le prove sulle macchine asincrone richiedono anche la misura dello scorrimento per valutare
la potenza persa nei circuiti di rotore. La velocità di scorrimento Ns è la differenza fra la velocità del campo magnetico rotante Nc e la velocità dell’albero motore Nr.
Lo scorrimento “s” è invece il rapporto tra la velocità di scorrimento Ns e la velocità del campo magnetico rotante Nc:
s=
Ns Nc − Nr
=
Nc
Nc
essendo:
Nc =
60 f
p
⎛ giri ⎞
⎜
⎟
⎝ minuto ⎠
(5.9)
La velocità Nc del campo rotante può essere determinata misurando la frequenza “f” di alimentazione del motore, mentre la velocità Nr all’albero della macchina può essere determinata
con un contagiri o un tachimetro.
Poiché le due velocità Nc e Nr sono molto vicine, la misura per differenza della velocità di
scorrimento potrebbe avere un’incertezza relativa elevata.
Con il metodo stroboscopico si fa una misura diretta della velocità di scorrimento.
Metodo stroboscopico
Su un disco calettato sull’albero del motore viene tracciato un segno di riferimento.
Quindi si illumina il disco con una lampada ad arco che emette dei lampi con una certa frequenza, vedi Fig.5.10. Se la frequenza dei lampi è esattamente uguale a quella di rotazione del
disco, un osservatore fisso vede il segno di riferimento sempre nella stessa posizione, ad ogni
lampo, e il disco sembra fermo.
Fig.5.10 - Schema per la misura con stroboscopio.
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
38 - Prove e misure sulle macchine
Consideriamo ora il caso di un motore con due poli e velocità di sincronismo di 3000 giri/min. Se la frequenza dei lampi è quella di rete (50 Hz), quella del disco è inferiore a causa
dello scorrimento. Allora il riferimento non compie un giro completo (nel tempo fra due lampi consecutivi) e verrà illuminato prima, producendo l’illusione ottica che il disco giri in senso opposto al moto reale, con una velocità che è pari a quella di scorrimento Ns (vedi, nella
Fig.5.10, i punti 1, 2, 3 del riferimento). Se indichiamo con n il numero di giri apparenti del
riferimento contati in un tempo Δt (in secondi), la velocità di scorrimento Ns risulta:
N s = 60
n giri
[
]
Δt min
(5.10)
La velocità apparente del riferimento corrisponde alla velocità di scorrimento Ns del disco rispetto al campo rotante.
Per esempio, su un motore con 3000 giri/min di sincronismo e scorrimento del 5 %, in un minuto si conterebbero 3000⋅5/100 = 150 giri apparenti del segno di riferimento.
La misura della velocità di scorrimento Ns può dunque essere fatta con l’impiego di un cronometro, contando i giri apparenti (n) in un tempo noto (Δt), espresso in secondi.
Per l’esempio precedente potremo contare 25 giri in 10 secondi. Infatti:
N s = 60
n
25
giri
= 60
= 150 [
]
Δt
10
minuto
(5.11)
Quanto detto finora è valido per un motore con due poli (una coppia polare).
Se la macchina ha quattro poli (due coppie polari p = 2), la sua velocità sincrona (cioè del
campo rotante Nc) è 1500 giri/min.
In un periodo di 20 ms (a 50 Hz) il disco compie solo mezzo giro fra un lampo e il successivo
e dunque avremo l’illusione ottica di “vedere” due segni di riferimento che ruotano con velocità Ns opposta a quella effettiva del rotore Nr (vedi Fig.5.8).
Fig.5.11 - Schema per la misura con stroboscopio.
Perciò se n è ancora il numero totale di passaggi contati nel tempo Δt occorre dividerli per 2 e
in generale per “p”.
N s = 60
n
pΔt
[
giri
]
minuto
(5.12)
Normalmente le apparecchiature per le misure stroboscopiche consentono di regolare la frequenza di emissione dei lampi e di visualizzarla.
In tal modo si può misurare la velocità angolare di un albero, variando la frequenza di alimentazione dello stroboscopio, fin quando il riferimento sul disco non appare fermo.
In tali condizioni la frequenza visualizzata coincide con la frequenza di rotazione dell’albero.
La misura richiede di considerare correttamente il numero di coppie polari del motore e
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Prove e misure sulle macchine - 39
l’eventuale molteplicità delle due frequenze.
6 - Prove su motori e convertitori
Motori alimentati da convertitori
Il motore asincrono alimentato direttamente dalla rete a 50 Hz lavora bene solo in un campo
ristretto di velocità. Quando si vuole controllare la velocità di rotazione Nr del motore asincrono, si impiegano i convertitori trifasi.
Un convertitore trifase produce una terna di tensioni con frequenza f e ampiezza V variabili
entro ampi limiti. Normalmente le macchine controllate in frequenza lavorano (per la maggior
parte del campo di funzionamento) con il rapporto V/f = costante. In pratica la tensione di alimentazione V è controllata ed è tenuta proporzionale alla frequenza di alimentazione f.
In tal modo il flusso nella macchina rimane costante e le caratteristiche della coppia meccanica Cm si spostano parallelamente a se stesse lungo l’asse delle velocità, mantenendo lo stesso
andamento in funzione della differenza di velocità ΔN = Nc - Nr (vedi in Appendice un breve
richiamo sulla macchina asincrona controllata in frequenza).
Forme d’onda nei convertitori
Nella Fig.6.1 si mostra la tensione concatenata e la corrente di linea per un motore asincrono
trifase alimentato da un convertitore PWM. L’induttanza degli avvolgimenti rende la corrente
più simile a una sinusoide (di fatto sono archi di esponenziali).
Fig.6.1 - Oscillogrammi della tensione concatenata e corrente di linea
in un motore asincrono alimentato tramite convertitore PWM.
Il convertitore è formato da un raddrizzatore (rectifier), collegato alla rete trifase di alimentazione, il quale produce una tensione continua sul bus DC, livellata da condensatori (Fig.6.2).
Fig.6.2 - Schema di convertitore con raddrizzatore e inverter.
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
40 - Prove e misure sulle macchine
Il convertitore presenta a valle del bus DC un ondulatore (inverter) che, dalla tensione continua, produce la terna di tensioni PWM con frequenza e ampiezza variabili.
Nella Fig.6.3 è riportata l’analisi spettrale delle forme d’onda della tensione concatenata e della corrente di linea del motore alimentato tramite convertitore PWM.
Nella Fig.6.4 si mostrano le forme d’onda della tensione stellata e della corrente di linea.
Infine, nella Fig.6.5 si mostra la potenza istantanea di una fase (per semplicità e chiarezza non
sono riportate le potenze delle altre due).
É evidente la forte irregolarità di tutte le forme d’onda che interessano il convertitore e il motore.
Fig.6.3 - Analisi armonica della tensione concatenata e corrente di linea.
Fig.6.4 - Tensione stellata e corrente di linea.
Misure sui Sistemi di Potenza
© 2014, Nicola Locci
Prove e misure sulle macchine - 41
Fig.6.5 - Potenza istantanea di una fase.
Valutazione delle perdite
A causa dell’elevato contenuto armonico delle tensioni e delle correnti, le perdite del motore
asincrono sono più elevate, rispetto al caso sinusoidale.
I metodi di separazione delle perdite che abbiamo visto per i motori asincroni in regime sinusoidale, non sono applicabili al caso di motori alimentati tramite convertitori, a causa del regime armonico e delle non linearità.
La strumentazione di misura delle grandezze di interesse deve essere particolarmente accurata
e sono da preferire sistemi e tecniche digitali.
Grande importanza hanno i trasduttori delle grandezze elettriche (tensione e corrente) e i sistemi di condizionamento dei segnali d’ingresso, che devono avere elevate bande passanti,
adeguate al passaggio delle armoniche che interessano il motore.
Spesso la determinazione delle perdite e del rendimento è effettuata considerando anche il
convertitore che verrà impiegato nel servizio ordinario, conglobando in tal modo anche le
perdite e il rendimento della conversione.
Hardware e software
I circuiti analogici d’ingresso dei sistemi di misura devono inoltre avere i filtri antialiasing,
per limitare il rumore prima del campionamento.
I sistemi di acquisizione dati devono essere veloci, il campionamento deve essere simultaneo
sui diversi canali, con risoluzione di almeno 12-16 bit.
Il software di calcolo deve essere studiato attentamente con riferimento alla sufficienza del
numero di campioni per periodo, all’accuratezza nella determinazione della frequenza fondamentale e alla sincronizzazione della frequenza di campionamento con la componente fondamentale, per l’analisi armonica.
Accuratezza nella misura della potenza persa
La potenza persa si misura come differenza fra la potenza assorbita la potenza resa.
A titolo di esempio, supponiamo che il motore abbia un rendimento η dell’ 85% e si abbia un
sistema di misura con un’incertezza complessiva nella determinazione delle potenze (assorbita Pa e resa Pu) pari a εp = 0,5%. Come noto, nelle misure per differenza dovremo attenderci
un’incertezza relativa tanto maggiore quanto migliore è il rendimento.
Nel nostro esempio avremo un’incertezza relativa sulla potenza persa Pp pari a:
© 2014, Nicola Locci
Misure sui Sistemi di Potenza
42 - Prove e misure sulle macchine
ε Pp = ε p
1+ η
1,85
= 0,5 ⋅
= 6,2%
1− η
0,15
(6.2)
Metodi calorimetrici
Per la misura della perdite complessive Pp di un motore si possono impiegare metodi
calorimetrici. Questi metodi sono più complessi è più onerosi di quelli visto finora, ma in certi
casi possono essere più accurati.
In pratica, si racchiude il motore in prova entro un vano con le pareti coibentate, in modo che
non si abbia scambio termico con l’ambiente esterno (vedi Fig.6.6).
Nel volume coibentato viene fatto scorrere un fluido refrigerante, di cui si misura la portata Q e
le temperature in ingresso T1 e in uscita T2. Il fluido refrigerante può seguire un circuito aperto
(come in Fig.6.6) oppure un circuito chiuso con uno scambiatore intermedio, per esempio del
tipo aria-acqua.
Fig.6.6 - Schema per il metodo calorimetrico.
A regime, quando è stato raggiunto l’equilibrio termico, la quantità di calore fornita al fluido
refrigerante proviene delle perdite complessive della macchina Pp.
Indichiamo con:
• Q = portata volumetrica del fluido di raffreddamento in [m3/s]
• cp = calore specifico del fluido in [kJ/(kg⋅K)]
• ρ = densità del fluido in [kg/m3], alla temperatura T in cui si misura la portata Q
• ΔT = (T2 - T1) = aumento della temperatura del fluido in gradi kelvin [K]
La potenza persa Pp in [kW] che viene scambiata a regime con il fluido refrigerante risulta:
Pp = c p ⋅ Q ⋅ ρ ⋅ ΔT
(6.3)
L’accuratezza della misura dipende essenzialmente dalla misura delle temperature e della portata. I dettagli esecutivi per la realizzazione delle prove sono riportati nelle Norme.
Misure sui Sistemi di Potenza
© 2014, Nicola Locci