RETI CAN
1.
INTRODUZIONE ALL’ ELETTRONICA ANALOGICA E DIGITALE
GENERALITÁ
I segnali elettrici che vengono solitamente considerati in elettronica possono
essere suddivisi fondamentalmente in due grandi tipologie. Le diverse caratteristiche di queste
tipologie impongono i diversi usi per cui è necessario scegliere l’una o l’altra.
DEFINIZIONE DI ANALOGICO
Una grandezza, elettrica o no, può essere considerata analogica quando può assumere nel tempo
tutti i livelli compresi generalmente tra un minimo ed un massimo.
Per rappresentare e comunicare una grandezza di questo genere in teoria è necessario usare un
numero infinito di cifre decimali.
Ad esempio un segnale sinusoidale è un segnale analogico perché assume tutti i valori compresi tra
il picco inferiore e quello superiore.
Molti fenomeni fisici che riguardano il normale funzionamento di un autoveicolo sono descritti da
grandezze analogiche, cioè da grandezze che variano nel tempo con continuità, come il numero di
giri del motore, la velocità del veicolo, l'accelerazione, la temperatura del motore, la pressione del
carburante, la tensione di batteria, ecc.
DEFINIZIONE DI DIGITALE
Una grandezza, elettrica o no, può invece essere considerata digitale quando può assumere solo
alcuni dei valori compresi tra un massimo ed un minimo.
Nel caso più estremo la grandezza può assumere solo i due valori estremi, in questo caso si parla
generalmente di segnale di tipo on-off.
Per rappresentare e comunicare una grandezza di questo tipo basterà assegnare ad ognuno dei
livelli un numero, non necessariamente progressivo,formato quindi di poche cifre. Da ciò si
comprende la derivazione del termine “digitale” che proviene dall’inglese “digit”, cioè “cifra”.
Negli impianti presenti sugli autoveicoli di recente produzione spesso si ricorre a strumentazione di
tipo digitale, alla memorizzazione ed all'elaborazione di dati, come accade nelle centraline di
accensione-iniezione elettronica.
All'interno di dette centraline i dati vengono elaborati da un microprocessore sotto forma numerica o,
come si dice più propriamente, digitale.
CONFRONTI
La differenza tra il sistema analogico e quello digitale risiede nel fatto che con il primo si ha una
maggiore precisione ma una enorme difficoltà di comunicazione dei dati, mentre nel secondo si ha
l’esatto contrario.
TECNICHE DI TRASMISSIONE
Dopo la rilevazione del livello digitale e la sua assegnazione ad una “cifra” si ha il problema di come
trasmettere, per via elettronica, questa cifra. La soluzione ampiamente adottata in tutti i sistemi
moderni di comunicazione è quella di trasformare la cifra in un formato più adatto alla trasmissione
elettrica.
Questo formato più adatto è stato riconosciuto nel sistema di numerazione binario
Il collegamento in rete fornisce un metodo più efficiente per la gestione della comunicazione a bordo
del veicolo e per il trasferimento delle informazioni tra i sottosistemi.
Il termine CAN (Controller Area Network = Rete di Controllori di area) racchiude la filosofia di questo
sistema, cioè quella di avere dei “controllori di area” collegati in “rete” che sovrintendono ognuno ad
una funzione ben specifica ma che comunicano molto tra di loro.
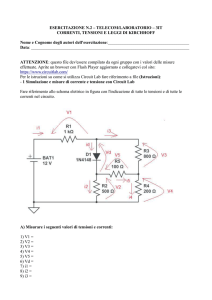
1.1. GRANDEZZE ANALOGICHE
Esempio di
segnale
analogico:
tensione erogata
dalla batteria
(raffigurato caso
di avviamento
motore)
Una grandezza analogica è una grandezza lineare che può assumere tutti i valori compresi tra un
massimo e un minimo.
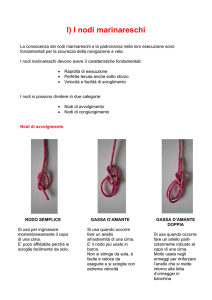
PROPRIETA’:una grandezza analogica può essere rappresentata usando tutte le cifre decimali che si
vuole. Per trasmettere una grandezza analogica con un qualsiasi mezzo trasmissivo (ad es. un filo di
rame, l’aria, la luce, ecc.) è possibile usare un’altra grandezza analogica.
termometr
(filo di rame)
1°C = 1Volt
15 Volt
(ricevitore)
15°C
15Volt=15°C
Esempio di trasmissione di una grandezza analogica.
ESEMPIO:
Ad esempio per trasmettere un valore di temperatura con un filo di rame si può scegliere di usare un
livello di tensione proporzionale alla temperatura.
In questo modo il ricevitore, misurando questo livello di tensione, riceve l’informazione della
temperatura.
1.2.
DISCRETIZZAZIONE E TRASMISSIONE DIGITALE
Per comunicare una grandezza che varia con continuità nel tempo spesso si ricorre al
“campionamento” cioè alla tecnica di misurare la grandezza a intervalli predefiniti.
DEFINIZIONE DI RISOLUZIONE:
Una grandezza digitale è una grandezza che può variare tra un massimo e un minimo solo a scatti
predeterminati. Il numero di questi “step” definisce la risoluzione della grandezza digitale in esame.
ESEMPIO:
Se ad esempio si sceglie di usare 100 valori per rappresentare una temperatura che può variare tra
0°C e 100°C si avrà una risoluzione di 1°C. Questo vuol dire che non si potrà rappresentare 10,5°C
ma solo 10°C oppure 11°C.
Oltre a discretizzare i valori misurati bisogna anche definire l’istante di tempo in cui la misura è stata
fatta. Questo perché dopo la ricezione bisogna poter ricostruire il valore misurato.
errore dovuto alla
discretizzazione
valori discreti
rappresentabili
istanti di misura
Esempio di campionamento nel tempo e discretizzazione dei valori.
DEFINIZIONE DI ERRORE:
E’ dunque normale dover accettare un certo errore dovuto alla discretizzazione. Questo errore nasce
dall’approssimazione che si deve fare per poter rappresentare una grandezza reale, e quindi
analogica, con dei valori discreti ed è pari al massimo alla metà della differenza tra due valori contigui
rappresentabili.
1.3.
TRASMISSIONE DI UNA GRANDEZZA DIGITALE
Dopo aver campionato e discretizzato la grandezza fisica è necessario poterla trasmettere a distanza
in modo semplice, efficiente ed affidabile.
a. Sequenza da codificare
b. Sequenza codificata
CARATTERISTICHE:
Per trasmettere una grandezza digitale è dunque sufficiente trasmettere il numero corrispondente al
livello più prossimo alla grandezza.
Se ad esempio si hanno 10 livelli rappresentabili per misurare una temperatura che può variare tra
10°C e 110°C per comunicare la temperatura di 30°C sarà sufficiente comunicare il numero “3”.
Il problema si è dunque trasformato da “trasmettere una grandezza fisica” a “trasmettere un numero”.
VANTAGGI:
Il vantaggio principale dell’usare questo sistema risiede nel fatto che gli errori di trasmissione sono
così molto più facili da rilevare e da correggere.
SEMPLIFICAZIONE:
Per semplificare il problema di trasmettere un “numero” si è scelto di trasformare prima il numero in
una forma più semplice. Il sistema usato è quello di rappresentare il numero in formato binario.
1.4.
SISTEMA DI NUMERAZIONE BINARIO
Il sistema binario rende i dati da trasferire in una forma molto più comoda da manipolare in quanto
sono presenti solo due stati.
DEFINIZIONE DI SISTEMA DECIMALE:
Il nostro normale sistema di numerazione è detto “decimale” perché usiamo rappresentare con una
stessa cifra 10 valori e assegnamo alla posizione della cifra un peso esprimibile in potenze di 10.
Ad esempio il numero 13 in base 10 ha il seguente significato:
1310 = 1 ∗101 + 3 ∗10 0
0
perché la cifra più a destra, detta delle unità, ha peso pari a 1 cioè 10 , mentre la cifra a sinistra, detta
1
delle decine, ha peso pari a 10, cioè 10 .
DEFINIZIONE DI SISTEMA BINARIO:
Se invece del sistema decimale si sceglie un sistema binario si avranno solo due valori
rappresentabili per ogni cifra (0 o 1) e il peso assegnato alla posizione sarà espresso come potenza
di 2.
Ad esempio il numero 1101 in base 2 ha il seguente significato:
11012 = 1∗ 2 3 + 1 ∗ 2 2 + 0 ∗ 21 + 1 ∗ 2 0
CONCLUSIONI:
La conclusione è che si ha una perfetta equivalenza tra il numero 13 espresso in decimale e il
numero 1101 espresso in binario.
VANTAGGI:
Il vantaggio è che avendo solo due grandezze da usare (0 o 1) invece di dieci (0,1,..,9) si semplifica
molto la fase di trasmissione perché si dovranno usare solo due grandezze elettriche invece di dieci.
Ad esempio si potrà scegliere di usare due livelli di tensione (0Volt e 12Volt) per comunicare ogni
cifra.
1.5.
SISTEMA DI TRASMISSIONE SERIALE E PARALLELO
Per trasferire un dato formato da più cifre (ad esempio i bit di una cifra binaria) si può scegliere se
farlo in maniera simultanea o sequenziale.
INTRODUZIONE:
Come si è già detto bisogna escogitare un modo per trasmettere un dato puramente numerico tra una
sorgente e un ricevitore.
Si suppone di avere già trasformato in formato binario questo “numero” da trasmettere.
Ora bisogna solo decidere come fare per trasmettere le singole cifre (ad es. 1 – 1 – 0 – 1) di questo
numero.
CARATTERISTICHE E DIFFERENZE:
La soluzione è molto semplice ed è percorribile secondo due strade fondamentali, si può infatti
scegliere di trasmettere:
una cifra per volta usando un solo mezzo trasmissivo (filo) trasmissione seriale.
tutte le cifre contemporaneamente usando tanti mezzi trasmissivi (fili) quante sono le cifre da
trasmettere trasmissione parallelo.
La scelta di una di queste due strade dipenderà fondamentalmente dal tempo che si ha a
disposizione per effettuare la trasmissione e dalle risorse (fili) che si possono sfruttare.
CRITICITA’:
Nel campo automobilistico solitamente si cerca di risparmiare molto dal punto di vista delle risorse
(cavi) da utilizzare quindi la scelta è ricaduta sulla trasmissione di tipo seriale.
TEMPISTICHE:
Nella trasmissione seriale, oltre alle grandezze fisiche (livelli di tensione) che caratterizzano le due
grandezze da trasmettere, bisogna fissare le TEMPISTICHE da usare; cioè il tempo che il trasmettitore
dovrà aspettare prima di passare alla trasmissione della cifra successiva.
DEFINIZIONE:
Definire il mezzo trasmissivo (filo in rame), i livelli di tensione che rappresenteranno i bit (ad es. 0 Volt
e 5 Volt), la durata temporale di ogni bit (ad es. 1 msec) vuol dire definire il “Protocollo fisico” della
trasmissione.
5 Volt
1101
durata temporale di una cifra
Esempio di trasmissione di quattro cifre binarie con due livelli di tensione.
DEFINIZIONI:
Il termine “digitale” deriva dal termine “digit” che in inglese significa “cifra”. Infatti come si è già fatto
notare si parla solo di trasmissione di cifre a prescindere dalla grandezza fisica.
Il termine “bit” deriva dalla contrazione dei termini “binary” e “digit” quindi dovrebbe essere inteso
correttamente come “cifra binaria” cioè 0 o 1.
2. SOLUZIONE CLASSICA DEGLI IMPIANTI SUI VEICOLI
Negli impianti elettronici classici ogni informazione viaggiava su un canale dedicato, inoltre la stessa
informazione poteva essere rilevata più volte da diversi sensori.
INTRODUZIONE:
Le tre centraline (nodi elettronici: controllo motore, ABS e quadro strumenti) necessitano per svolgere
la loro funzione di un numero N di fili, uno per ogni informazione in entrata / uscita.
CRITICITA’:
Ciò ha generato una evoluzione del cablaggio tanto da renderlo più complesso (progettazione e
fabbricazione), più voluminoso (massa, ingombro, costo), fino a circa 40 kg di fasci di cavi per una
lunghezza di oltre 2 km con la possibilità di raddoppio ogni 10 anni.
Esempio di soluzione classica con un filo per ogni informazione da trasmettere.
SOLUZIONE:
Il primo passo che ha permesso di diminuire il volume e la complessità dei cavi è stato quello di
raggruppare più funzioni elettroniche in una sola unità: meno centraline = meno fili.
1° esempio) La centralina controllo motore (NCM) gestisce l’iniezione, l’accensione, il sistema
antinquinamento, il controllo del raffreddamento motore, ecc.
1 Centralina controllo motore
2 e 3-Relè comando elettroventola raffreddamento motore 1° e 2° velocità
4 Elettroiniettori
5 Bobine di accensione
6 Sonda Lambda
2° esempio) La centralina multifunzioni che gestisce: l’azionamento degli alzacristalli anteriori, lo
sblocco / blocco delle porte, l’illuminazione temporizzata abitacolo e del vano bagagli, l’inserimento
temporizzato lunotto termico e dei dispositivi di sbrinamento degli specchi retrovisori esterni.
1 Centralina controllo porte.
2 Relè comando
3 Comando Bloccaporte
4 e 5 o Luci plafoniere
6 Comando sbrinamento specchi esterni e Lunotto termico
3. SISTEMA DI COMUNICAZIONE MULTIPLEX
Il sistema di comunicazione multiplex consente di condividere lo stesso mezzo trasmissivo (filo) tra
più utenti, sia trasmettitori che ricevitori.
Molte volte capita di non avere a disposizione neanche un supporto fisico (filo) per ogni informazione
da trasmettere.
Ad esempio non è pensabile che ogni abitazione dotata di telefono abbia un filo personale che la
colleghi ad ogni altra abitazione.
In questi casi è necessario prevedere una forma di condivisione della risorsa fisica (filo) tra più utenti
in modo che ognuno la possa usare senza interferire con l’utilizzo degli altri.
Naturalmente in questi casi non è più possibile disporre del mezzo trasmissivo liberamente ma
bisognerà prevedere tutte le modalità di accesso e di utilizzo.
CARATTERISTICHE DEL MUX FISICO:
Uno dei sistemi più semplici per condividere un mezzo trasmissivo è quello di usare dei deviatori sia
in trasmissione che in ricezione e di commutarli di volta in volta per impostare correttamente la strada
che il messaggio dovrà percorrere.
Schema di un sistema MULTIPLEX fisico.
VANTAGGI E SVANTAGGI:
Questo tipo di multiplex, detto multiplex fisico, ha il vantaggio di poter essere utilizzato per
trasmissioni sia analogiche che digitali, ma ha dei grossi limiti dovuti alle tempistiche di
commutazione.
LIMITI:
Il limite di questo tipo di comunicazione risiede nella necessità di una sincronizzazione, cioè si deve
stabilire a priori chi "parla" e chi "ascolta" e "quando" a prescindere dal fatto che il "parlatore" abbia o
meno bisogno di usare la risorsa. Come si può intuire questa soluzione non è ottimale dal punto di
vista dello sfruttamento della risorsa.
SOLUZIONE ALTERNATIVA:
Una soluzione alternativa, molto più efficiente ma anche molto più complessa, è quella del "listen
and talk".
Questo tipo di comunicazione, molto usato per le reti locali di computer, prevede la possibilità per
ogni utente di usare la risorsa ogni volta che gli serve a patto che non la stia già usando qualcun
altro, in tal caso si metterà in attesa fintanto che si libera.
VANTAGGI E SVANTAGGI:
Questo sistema di comunicazione asincrono consente uno sfruttamento totale della risorsa ma
richiede una elevata complessità tecnologica dal punto di vista delle interfacce.
Bus
Utilizzatore
1
3.1.
Utilizzatore
2
Utilizzatore
3
Utilizzatore
4
SISTEMA DI COMUNICAZIONE MULTIPLEX IN AUTOMOTIVE
INTRODUZIONE:
In questi ultimi anni i sistemi elettronici sui veicoli si sono sviluppati rapidamente e hanno determinato
la buona funzionalità del veicolo.
Quella che prima era una scienza complementare della meccanica si è trasformata in un settore
chiave della tecnologia automobilistica al punto che attualmente gli impianti elettronici determinano la
funzionalità del veicolo e l’efficacia con cui i singoli componenti interagiscono tra loro.
LIMITI DEGLI IMPIANTI TRADIZIONALI:
L'aver introdotto a bordo una serie sempre crescente di sottosistemi elettronici ha portato al rapido
raggiungimento di un punto di saturazione sia per la complessità dei cablaggi, sia per la diagnosi in
caso di avarie. Il problema sostanziale era quello di riuscire a far dialogare tra loro i vari sottosistemi
in modo rapido ed efficiente evitando inutili sprechi di risorse.
Ad esempio si è constatato che molti sistemi acquisivano la stessa grandezza fisica usando ognuno
un sensore diverso, oppure che per comandare un attuatore posto a pochi centimetri da una
centralina era necessario un cablaggio che facesse il giro di tutto il mezzo.
Con queste affermazioni non si vuole comunque dire che i sistemi elettronici tradizionali non siano
efficienti ma solo che il naturale evolversi del settore ha portato alla ricerca di una riorganizzazione
organica di tutto il mezzo dal punto di vista elettronico.
VANTAGGI DEI NUOVI IMPIANTI:
Una delle innovazioni tecnologiche che sicuramente ha già rivoluzionato il settore dell’elettronica a
bordo dei veicoli è quella CAN (Controller Area Network). Si tratta in pratica di un cablaggio dedicato
che collega tra loro le centraline (ECU) di un veicolo, creando così una struttura simile al sistema
nervoso. Questo sistema consente lo scambio istantaneo di grosse quantità di dati tra i vari sistemi
elettronici a bordo del veicolo.
CARATTERISTICHE DI UN IMPIANTO MULTIPLEX:
Rappresenta una modalità di comunicazione BIDIREZIONALE che si sta sempre più affermando nel
campo veicolistico, grazie alla riduzione del numero di conduttori e quindi delle interferenze. Le
informazioni viaggiano rispettando un protocollo che definisce le modalità di colloquio:
• sincronizzazione delle informazioni;
• modalità di chiamata e risposta tra i vari sistemi;
• identificazione e correzione di eventuali errori di trasmissione.
3.2.
LINEA CAN FISICA (DOPPINO E TERMINAZIONI)
Il mezzo trasmissivo (filo) che la tecnologia CAN richiede deve rispettare delle caratteristiche ben
precise che influenzano radicalmente il funzionamento dell’intero sistema.
CARATTERISTICHE:
Fisicamente una linea di comunicazione CAN è costituita da una coppia di fili che possono essere
solo accostati tra loro oppure intrecciati (twistati).
DIFFERENZE:
La differenza tra queste due tecnologie realizzative della linea risiede nella maggiore o minore
immunità ai disturbi elettromagnetici e di conseguenza alla velocità con cui si possono far transitare
le informazioni.
CARATTERISTICHE DEL DOPPINO SEMPLICE:
Per meglio comprendere la necessità di tenere il più vicino possibile i due conduttori esaminiamo il
caso limite opposto, cioè di due conduttori che viaggiano uno da un lato del veicolo e uno dall’altro. E’
facile comprendere in questo caso che in caso di presenza di forti campi magnetici esterni (linee ad
alta tensione, linee ferroviarie o tranviarie, ecc.) l’enorme spira che così si realizza creerà una
corrente indotta anche di forte intensità.
Sarà quindi meglio tenere i due conduttori il più vicino possibile per ridurre la superficie della spira.
CARATTERISTICHE DEL DOPPINO TWISTATO:
Invece se i cavi vengono intrecciati tra loro, in presenza di campo magnetico esterno, questo
attraverserà la “spira” per un tratto in un verso e per l’altro nell’altro verso con effetti evidentemente
molto ridotti.
VANTAGGI:
Inoltre dal punto di vista dell’immunità ai disturbi elettrici se i due conduttori sono molto vicini saranno
soggetti allo stesso disturbo, quindi misurando solo la differenza di tensione il disturbo sarà
probabilmente ignorato.
3.3.
PROTOCOLLO CAN - LIVELLO FISICO
Il livello fisico di un protocollo è quello che fissa le regole costruttive sia del mezzo trasmissivo (filo)
che delle grandezze (tensioni) da utilizzare per la trasmissione.
CARATTERISTICHE:
Il protocollo di comunicazione CAN parte dal presupposto di avere un unico mezzo trasmissivo (il bus
CAN) e molti accessi. Perciò il primo punto da affrontare è quello dei collegamenti fisici tra gli
utilizzatori del bus.
La linea di trasmissione utilizzata come bus CAN ad alta velocità ha una impedenza caratteristica di
120ohm, quindi bisognerà prevedere la presenza di opportuni terminatori di linea per evitare
riflessioni indesiderate del segnale a fine linea.
nodo2
Can_H
120Ohm
Can_L
120Ohm
Can_L
Can_H
nodo1
CRITICITA’:
Vista l'impossibilità di conoscere a priori il numero e la presenza o meno dei nodi di accesso alla
linea, si è scelto di fare in modo che lo stadio di ingresso/uscita di questi non carichi la linea.
Per far ciò gli stadi di ingresso uscita lavorano in modalità differenziale senza influenzare il carico
della linea CAN.
I livelli di tensione prestabiliti per i livelli alto e basso sono:
Can_H
Can_L
differenza
ammessa
livello 1 (alto)
2,5V
2,5V
-0,50V ..
+0,05V
livello 0 (basso)
3,5V
1,5V
+1,50V ..
+3,00V
3.4.
PROTOCOLLO CAN - LIVELLO RETI
Il livello reti in un protocollo fissa le regole per la coesistenza di più utenti e per l’utilizzo comune
dell’unico mezzo trasmissivo a disposizione.
CARATTERISTICHE:
Dopo aver fissato il livello fisico di una rete bisogna accordarsi sui parametri che caratterizzano la
rete:
• velocità di trasmissione;
• tempo di risposta;
• numero massimo di nodi;
• distanza massima tra i nodi più estremi, ecc.
Nel caso del bus CAN sono caratteristici i seguenti parametri:
NUMERO
LUNGHEZZA
VELOCITÀ
MASSIMO
DELLA
TRASMISSIONE
DI NODI
LINEA
30
30
30
40 m
160 m
320 m
DI
1 Mbit/s
250 Kbit/s
125 Kbit/s
CRITICITA’:
Notare che la velocità di trasmissione sulla linea è strettamente legata alla lunghezza della stessa
perché in un protocollo di comunicazione asincrono bisogna tener conto dei conflitti e quindi
aspettare tra la trasmissione di un simbolo e l'altro il tempo necessario alla propagazione dello stesso
da una capo all'altro della linea. Si approfondirà meglio questo problema nel paragrafo dedicato al
livello Data Link.
3.5.
PROTOCOLLO CAN - LIVELLO DATA LINK
Il livello data link in un protocollo stabilisce le regole software di comunicazione per la costruzione del
messaggio e per la gestione degli errori.
CARATTERISTICHE: questo livello definisce l'insieme di regole necessarie per far comunicare i nodi
di una stessa rete. Definisce cioè i seguenti parametri:
• controllo e protezione dell'informazione a livello di frame;
• codifica dell'informazione;
• costituzione del messaggio;
• arbitraggio;
• rilevamento e trattamento degli errori.
Ogni nodo della rete CAN ha, oltre alla sua CPU con relativa memoria dinamica, anche un
Controllore ed una Interfaccia BUS.
bus CAN
comandi
interfaccia input
μP
controllore
interfaccia
mem
nodo A
relè statici
attuatori
Esempio schematico di un nodo CAN
3.5.1.
INTERFACCIA BUS
Tutte le centraline elettroniche collegate alle linee CAN prendono il nome di “Nodi”
I “Nodi” sono connessi alle linee CAN
“Transceiver”.
1.
2.
3.
4.
per mezzo di un’interfaccia di comunicazione detta
Unità elettronica “Nodo”
Microprocessore
Interfaccia di comunicazione o TRANSCEIVER
Rete CAN (doppino)
Distinzione macroscopica tra microprocessore e interfaccia di comunicazione.
Transceiver
FUNZIONAMENTO: l'interfaccia BUS o Transceiver è la parte responsabile della
ricezione/trasmissione dei messaggi sulla rete. Nella fase di trasmissione si preoccupa di
impacchettare il messaggio fornito dal Controllore con una serie di informazioni aggiuntive che
servono alle altre interfacce BUS per identificare il tipo di messaggio, la sua priorità, ecc. Mentre in
ricezione ripulisce i dati dai bit di controllo e comunica il messaggio al Controllore. Il messaggio è
costituito da una parte di dati e da una di controllo per la correzione degli errori (CRC).
DEFINIZIONE DI CSMA/CD: quando l'interfaccia BUS di un nodo decide di trasmettere una "trama"
(frame) usa il sistema CSMA/CD (Carrier Sense Multiple Access/Collision Detect), cioè:
• "ascolta" se il canale è libero (Carrier Sense);
• se è libero inizia a trasmettere il primo bit;
• in contemporanea "ascolta" il canale per controllare che dopo il necessario tempo di propagazione
nessun'altro abbia tentato di "parlare" sporcando il bit trasmesso (Collision Detect);
• se non ci sono state collisioni continua la trasmissione tranquillamente perché è sicura che da quel
punto in poi nessun altro inizierà una nuova trasmissione.
FASE DI RICEZIONE: le interfacce BUS di tutti i nodi che sono in ascolto ricevono in parallelo la
trama e ne controllano la parte di arbitraggio e di comando. Solo i nodi che sono in grado di eseguire
il tipo di comando ricevuto si preoccuperanno di decodificare anche il comando vero e proprio
contenuto nella parte di dati della trama.
La parte di trama chiamata arbitraggio definisce l'importanza del messaggio, cioè la priorità che il
nodo ricevente deve dare all'esecuzione del comando.
A Accetta
B Seleziona
C Riceve
D Prepara
E Invia
1,2,3,4 NODI
WAKE-UP DEI NODI COLLEGATI AL BUS
I transceiver CAN a due fili offrono una modalità di standby a bassa potenza/spegnimento.
La riattivazione viene eseguita da un Nodo quando viene rilevata attività sul bus.
Nella modalità di standby i transceiver della ECU interessata rilevano il passaggio da recessivo a
dominante e generano un segnale di wake-up per il µC.
Per la riattivazione del bus sarà inviato un messaggio sulla linea CAN con 5 bit dominanti consecutivi.
A Sensori di Wake up
M body Computer
E Nodi
4.
CODIFICA DEL MESSAGGIO TRASMESSO SUL BUS ( CAN 2.0 A )
Il frame di ogni messaggio può essere suddiviso in 7 campi:
Legenda:
1 Bit di partenza (SOF).
2 Identificativo (priorità o arbitraggio) di scrittura del messaggio.
3 Controllo e sincronizzazione (RTR+r0 + DLC)
4 Informazione da trasmettere
5 Rilievo errori del nodo ricevente sul frame ( CRC)
6 Informazione di ritorno al nodo trasmittente di corretta ricezione da almeno un nodo (ACK e DEL)
7 Bit di fine messaggio (EOF)
8 Tempo, concesso, per il trasferimento del frame nel buffer del nodo ricevente ( IFS)
IDLE : Stato di quiete del BUS è a livello alto (recessivo).
- Start Of Frame (SOF)
E’ un bit a livello basso (dominante) che indica l’inizio del frame. Lo stato di quiete (IDLE) del bus
CAN è a livello alto (recessivo), con questo bit si intende generare una transizione negativa sulla
quale tutti i nodi presenti in rete possano eseguire la sincronizzazione.
Tale transizione inoltre viene impiegata per indicare che un nodo ha dato inizio alla trasmissione
del codice Identificativo “priorità o arbitraggio”.
- Identificativo “priorità o arbitraggio”
Se tutte le centraline elettroniche collegate sulle reti iniziano a trasmettere contemporaneamente dei
dati, ciò comporterebbe una sovrapposizione di informazioni può determinare errori sul
riconoscimento dei dati trasmessi.
A tal proposito, ad ogni centralina viene assegnato in fase di progetto, un codice di “priorità o
arbitraggio”, undici bit, il quale determina in modo univoco il contenuto del frame e la sequenza di
accesso alla linea.
Per maggiore comprensione del meccanismo di “priorità o arbitraggio” di trasmissione fra i “Nodi”,
nella figura sottostante è stata evidenziata una condizione simultanea di invio dati sulla rete :
1.Unità elettronica “A”
2.Unità elettronica “B“
3.Informazione sulla rete.
Dall’esempio di arbitraggio si nota che i “Nodi“ (1) e (2) inviano contemporaneamente un messaggio
identico fino al quarto bit.
Al quinto bit il nodo (1) forza il livello alto del nodo (2), portandolo ad un livello basso.
Il nodo (2) accorgendosi che il suo messaggio è stato modificato, capisce che in quel momento c’è un
altro nodo che ha una priorità di trasmissione superiore e smette di trasmettere, ponendosi in ascolto
fino a quando il nodo (1) ha liberato la linea.
- Request of Transmission (RTR)
Permette di richiedere ad un nodo della rete la trasmissione di un particolare messaggio, quello
individuato dal campo identificativo.
I frame di richiesta e di risposta a quella richiesta hanno lo stesso identificativo ma valore di RTR
diverso:
- il frame di richiesta ha il bit RTR settato a 1
- il frame di risposta a quella richiesta ha il bit RTR settato a 0
poiché il valore 0 è dominante, la risposta è prevalente sulla richiesta.
- Controllo
Ogni frame contiene un campo di 6 bit di controllo, suddivisibili ulteriormente in 2 parti:
1. r0 (r1 per frame estesi)
questi 2 bit sono riservati e non utilizzati al momento, ma consentiranno la definizione e il
riconoscimento di versioni future del bus
2. DLC (Data Lenght Control)
indica il numero di byte di dato contenuti nel frame (tra 0 e 8 byte)
- Dati
In questo campo vengono inseriti i dati da trasmettere. Questo campo può avere lunghezza nulla,
è il caso di un messaggio che contenga un comando senza parametri. (massimo 8 byte)
- CRC
Questo campo è trasmesso dopo il campo (dati) ed è seguito da un bit recessivo di delimitazione.
Serve al nodo ricevente per rilevare eventuali errori sul frame. (15 bit)
- ACK + DEL (Delimiter)
Ogni nodo che riceve il frame in maniera corretta è chiamato a sovrascrivere questo bit con un livello
dominante, ciò consente di informare il nodo trasmittente che il messaggio è giunto correttamente sul
mezzo fisico ed è stato ricevuto da almeno un nodo.
Nel caso in cui il nodo trasmittente rilevi questo bit a livello recessivo per tutta la durata della
trasmissione, lo stesso nodo procede a segnalare l’errore al livello applicativo
E’ un campo della lunghezza di 2 bit trasmesso a livello recessivo.
- EOF (End Of Frame)
Rappresenta una sequenza di 7 bit a livello recessivo.
Svolge una doppia funzione:
- chiude il frame
- rilevare sul frame. Un campo EOF che non contenga 7 bit a livello recessivo viola il protocollo e
segnala a tutti i nodi che compongono la rete l’avvenuto errore.
- IFS (Inter Frame Space)
Ha durata di 3 bit. Garantisce al nodo che ha ricevuto il frame il tempo necessario per la sua gestione
interna, ovvero permette il trasferimento del frame nel buffer di ricezione previsto
a 1Mbit/s questo tempo è di soli 3 us.
- Bus Idle
Lo stato di quiete (IDLE) del bus CAN è a livello alto (recessivo), permane nello stato di idle se
nessun nodo comincia una nuova trasmissione dopo quella appena conclusa.
5.
AFFIDABILITÀ DELLA TRASMISSIONE DEI DATI SU LINEA B-CAN
Le centraline elettroniche collegate alla linea B-CAN sono in grado di evitare la perdita dei dati e delle
informazioni anche in presenza delle seguenti anomalie:
- Filo / linea CAN (H) interrotto
- Filo / linea CAN (L) interrotto
- Filo / linea CAN (H) in corto circuito(c.c.) verso il positivo(+) di batteria
- Filo / linea CAN (L) in corto circuito(c.c.) verso il positivo(+) di batteria
- Filo / linea CAN (H) in corto circuito(c.c.) verso il negativo(-) di batteria
- Filo / linea CAN (L) in corto circuito(c.c.) verso il negativo(-) di batteria
- Filo / linea CAN (H) in corto circuito(c.c.) con il Filo / linea CAN (L)
RX
TX
Diagnostica
R1
R0
R2
Vref
FILTRO
CAN H
CAN L
Bus CAN
L’interfaccia di comunicazione,grazie alla cella diagnostica, individua l’anomalia sul BUS ed effettua un
isolamento di una delle linee al fine di funzionare su una linea sola.
CAN H
CC
CAN H
CAN L
CAN L
TRANSCEIVER
NOTA: si definisce Fault Tollerant
PERDITA DI COLLOQUIO SULLA LINEA B-CAN
Le centraline elettroniche collegate alla linea B-CAN perdono ogni possibilità di colloquio in caso di
presenza delle seguenti anomalie:
•
Interruzione contemporanea del Filo / linea CAN (H) e del Filo / linea CAN (L)
•
Corto circuito delle linee CAN (H) e CAN (L) fra loro e contemporaneamente collegate alla
massa del veicolo.
PERDITA DI COLLOQUIO SULLA LINEA C-CAN
Le centraline elettroniche collegate alla linea C-CAN perdono ogni possibilità di colloquio in caso di
presenza delle seguenti anomalie:
- Filo / linea CAN (H) interrotto
- Filo / linea CAN (L) interrotto
- Filo / linea CAN (H) in corto circuito(c.c.) verso il positivo(+) di batteria
- Filo / linea CAN (L) in corto circuito(c.c.) verso il positivo(+) di batteria
- Filo / linea CAN (H) in corto circuito(c.c.) verso il negativo(-) di batteria
- Filo / linea CAN (L) in corto circuito(c.c.) verso il negativo(-) di batteria
- Filo / linea CAN (H) in corto circuito(c.c.) con il Filo / linea CAN (L)
COLLOQUIO SULLA LINEA SERIALE W ( se presente)
Nel caso si verifichi un malfunzionamento della rete C-CAN la centralina controllo motore (NCM)
passa in recovery ed abilita la linea seriale “W” per ricevere dal Body Computer (NBC) il codice di
sblocco per l’avviamento del motore.
Sulla linea seriale “W” transitano due messaggi:
•
Richiesta codice IMMO da (NCM)
•
Risposta codice IMMO da (NBC) solo dopo aver riconosciuto una chiave nota al sistema
CODE.
In pratica una linea seriale è costituita da un filo di rame utilizzato per il trasferimento dei dati in modo
consecutivo, alternando livelli di tensione alti (H) e bassi (L) in continuazione cioè seriali.
Di norma i valori di tensione corrispondenti ai livelli logici sono i seguenti:
- (H) livello alto = circa 80% della tensione di batteria
- (L) livello basso = circa 20% della tensione di batteria
Esempio: con tensione batteria di 12Volt
- (H) livello alto = 9,6 Volt
- (L) livello basso = 2,4 Volt
6.
TRASFORMAZIONE DEI SEGNALI
TRASFORMAZIONE SEGNALI
Il processo di trasformazione segnali avviene per ogni singolo messaggio (frame) trasmesso sul bus
CAN
L’immagine mostra schematicamente un esempio di trasformazione da segnale elettronico digitale
(valori logici bit1, bit 0 ) a segnale
analogico ( tensioni differenziali. 1,4 – 3,6 V ) e viceversa.
A Logica Guasti
B Amplificatore CAN Low
C Amplificatore differenziale
D Possibile livello di segnale all’ uscita dell’ amplificatore differenziale
E Amplificatore CAN High
6.1. PRESENZA DI DISTURBI SULLA LINEA
La struttura di un nodo CAN per sua stessa natura offre un naturale filtraggio ai disturbi elettromagnetici
sul BUS.
La trasmissione dei messaggi (segnali trasmessi sul bus) con le reti CAN, sono di tipo differenziale.
Ovvero utilizza il sistema di trasmissione speculare per evitare i disturbi che la rete può raccogliere
dall’ambiente circostante.
La presenza, ad esempio, di un disturbo di 2,5 Volt su entrambe le linee ne comporta che il valore di
tensione risultante è:
- VA ( CAN-H ) = 7,5 + 2,5 = 10 Volt
- VB ( CAN-L ) = 2,5 + 2,5 = 5 Volt
A = Disturbi
B = Segnale Filtrato
Si può notare che la differenza fra la tensione VA e VB resta nelle caratteristiche funzionali corretta,
infatti:
- V Out = ( VA – VB ) = ( 7,5 + 2,5 ) – ( 2,5 + 2,5 ) = (10 – 5 ) = 5 Volt ( disturbo presente )
- V Out = ( VA – VB ) = ( 7,5 – 2,5 ) = 5 Volt ( disturbo assente )
In conclusione un disturbo concomitante sulle due linee CAN è come se in pratica non fosse MAI esistito.
In questo modo la rete risulta immune da una serie di disturbi elettromagnetici.
VANTAGGI COSTRUTTIVI:
L’uso dell’amplificatore operazionale come elemento che esegue la differenza dei due segnali in ingresso
implica una naturale eliminazione di quei disturbi presenti in eguale misura su entrambi i conduttori.
ARCHITETTURA VE.N.I.C.E. (VEhicle Network Integration Component Electronics)
L’architettura Ve.N.I.C.E. è una prima forma di integrazione in una rete dei componenti elettronici
presenti a bordo vettura che permette lo scambio e la condivisione di informazioni.
CARATTERISTICHE: l’architettura VENICE è una applicazione del sistema multiplex o MUX. Il
sistema VENICE consente di ottenere l’ottimizzazione dell’impianto elettrico, poiché ogni centralina è
posta in posizione baricentrica rispetto alle funzioni da essa gestite.
Questo permette di minimizzare l’impianto di distribuzione della potenza e dei segnali.
L’architettura del cablaggio viene ridotta, perché ogni funzione del sistema richiede un minore
numero di cavi dedicati.
VANTAGGI: con impianti di questo tipo i vantaggi sono innumerevoli, ad esempio:
• i sensori presenti nei vari sottosistemi si rendono disponibili sulla rete;
• si elimina la presenza di sensori simili;
• viene incrementata la flessibilità del sistema;
• possono essere aggiunte nuove funzioni solo attraverso modifiche del software (evoluzione
durante la vita del veicolo);
• si semplifica la progettazione dei cablaggi e diminuisce il numero dei connettori;
• si incrementa la sicurezza del funzionamento dei dispositivi elettronici migliorando l’affidabilità
delle informazioni trasmesse.
• si ha una funzione diagnostica integrata semplificando le operazioni di assistenza sui componenti
elettrici / elettronici.
6.2.
STRUTTURA DELLA RETE CAN (Controller Area Network)
La rete CAN a bordo dei veicoli può essere strutturata in più sotto-reti dedicate a compiti specifici, in
modo che le informazioni dedicate ad un settore specifico dell’impianto restino confinate nella sottorete specifica. Senza però precludere lo scambio di dati tra sotto-reti diverse.
CARATTERISTICHE:
Per consentire lo scambio di informazioni, i sistemi elettrici / elettronici presenti nell’impianto VENICE
comunicano attraverso due reti fisicamente separate e denominate rete B-CAN a bassa velocità e
rete C-CAN ad alta velocità.
FUNZIONAMENTO:
I dati che devono essere condivisi dalle reti B-CAN e C-CAN sono gestiti dall’unità Body Computer
che essendo provvista di entrambe le interfacce svolge la funzione di “cancello” della rete. E’
mediante questo dispositivo che due reti completamente diverse possono essere connesse.
1.
2.
3.
4.
5.
6.
7.
8.
CAB centralina airbag
NCR nodo cambio robotizzato
NCM nodo centralina motore
NAS nodo sensore angolo
sterzo
NFR nodo impianto frenante
Resistenza di terminazione su
NFR
Linea seriale K
Rete C CAN alta velocità di
trasmissione
linea
twistata(controller
area
network):H= segnale alto;L=
segnale basso
9. Resistenza di terminazione su
NBC
10. Rete B CNA bassa velocità di
trasmissione linea parallela
(doppino):H= segnale alto;
L=segnale basso
11. NBC nodo Body Computer
12. Presa diagnosi 16 pin EOBD
(electronic
on
board
diagnostic)
13. Antenna Alfa Code
14. NIT nodo infotelematico
15. NRR nodo radio ricevitore
16. Antenna GPS – GSM
17. NCL nodo climatizzatore
18. NPG nodo porta guidatore
19. NVB nodo vano baule
20. NQS nodo quadro strumenti
21. CAV centralina sensori volumetrici
22. CSA centralina sirena antifurto
6.3.
COLLEGAMENTO CAN A BASSA VELOCITA’ (B-CAN)
Una delle sotto-reti presenti sul veicolo è quella che si occupa della gestione delle funzioni di ausilio
alla guida come il navigatore o il climatizzatore. Per queste funzioni è sufficiente una bassa velocità di
trasmissione delle informazioni.
CARATTERISTICHE:
Sulla rete B-CAN (bassa velocità) possono essere presenti un massimo di 10 nodi (uno per ogni
centralina o unità elettronica) tutti collegati mediante una coppia di cavi (BUS CAN).
La lunghezza massima dei BUS non deve superare i 20m e la velocità di trasmissione è di 50
kbit/sec.
Rete B-CAN (bassa velocità).
1.
2.
3.
4.
5.
6.
7.
8.
NBC nodo body computer
NQS nodo quadro strumenti
NCL nodo climatizzatore
NPG nodo porta guidatore
NIT nodo infotelematico
NRR nodo radio ricevitore
NVB nodo vano baule
Resistenze di terminazione
6.4.
TERMINAZIONE / POLARIZZAZIONE DELLA RETE
La rete B-CAN non necessita di terminazioni di fine linea ma di resistenze di carico su ogni nodo.
CARATTERISTICA:
Le resistenze di terminazione non chiudono come un anello la line B-CAN ma sono collegate
direttamente nel nodo CAN cioè sul transceiver di ogni singola unità elettronica.
Livelli di tensione della rete B-CAN (bassa velocità).
1. CAN nodo 1
2. CAN nodo 2
3. CAN nodo n
b Resistenze di terminazione di valore calibrato presenti su ogni singolo nodo
Tensione differenziale minima in modo recessivo V CAN H 0,2 – V CAN L 4,8 = – 4,6 Volt (bit 1)
Tensione differenziale minima in modo dominante V CAN H 3,6 – V CAN L 1,4 = + 2,2 Volt (bit 0)
6.5.
COLLEGAMENTO CAN AD ALTA VELOCITA’ (C-CAN)
La rete C-CAN gestisce lo scambio di informazioni vitali per il funzionamento dell’intero sistema quali
ad esempio la gestione motore o l’ABS. Questa rete necessita quindi di una velocità di trasmissione
molto più alta e di accorgimenti costruttivi particolari.
CARATTERISTICA DEI NODI:
Per trasferire le informazioni, tutte le unità elettriche / elettroniche relative alla catena C-CAN ad alta
velocità sono dotate di una interfaccia compatibile per la ricezione e la trasmissione dei dati.
CARATTERISTICA DELLA RETE:
Sulla rete C-CAN (alta velocità) possono essere presenti un massimo di 6 nodi (uno per ogni
centralina elettronica) tutti collegati mediante una coppia di cavi (BUS CAN).
Caratteristica necessaria ed obbligatoria dei cavi del BUS C-CAN è quella di essere a coppia
intrecciata o twistata. Si tratta di un artificio mediante il quale avvolgendo a treccia o spirale due cavi
elettrici tra loro si eleva il grado di immunità ai disturbi elettromagnetici di origine esterna.
La lunghezza massima dei BUS non deve superare i 10m. La velocità di trasmissione è di 500
kbit/sec.
Esempio di rete C-CAN ad alta velocità.
1.
2.
3.
4.
6.6.
NBC nodo body computer
NCM nodo centralina motore
NCR nodo cambio robotizzato
NAS nodo angolo sterzo
5.
6.
NFR nodo impianto frenante
Resistenze di terminazione
TERMINAZIONE / POLARIZZAZIONE DELLA RETE
La linea C-CAN (high speed) deve essere chiusa ad anello per dare un carico costante ai nodi e per
attenuare le riflessioni di segnale a fine linea.
Questo si effettua con due resistenze di terminazione da 120 Ohm., dando origine ad un valore di
impedenza totale sulla linea di 60 Ohm.
Queste resistenze Rt non si trovano sulla linea (cablaggio), ma sono all’interno del primo e ultimo
nodo. In caso di anomalia su resistenze Rt bisogna sostituire il nodo interessato.
Schema dei collegamenti delle due reti CAN e relativi pin out
6.7.
LIVELLI DI TENSIONE AMMESSI IN UNA RETE C-CAN
In una rete C-CAN i nodi collegati usano delle soglie di tensione prefissate per distinguere la cifra
binaria (0 o 1) che rilevano sul BUS.
A TENSIONE
B TEMPO
Condizione recessiva su rete C-CAN
A TENSIONE
B TEMPO
Condizione dominante su rete C-CAN
6.8.
LIVELLI DI TENSIONE AMMESSI IN UNA RETE B-CAN
In una rete B-CAN a bassa velocità la differenza di tensione tra le due linee determina il valore del bit
trasmesso (0 o 1).
Livelli di tensione della rete B-CAN (bassa velocità).
1.
CAN nodo 1
2.
CAN nodo 2
3.
CAN nodo n
b Resistenze di terminazione di valore calibrato presenti su ogni singolo nodo
Tensione differenziale minima in modo recessivo V CAN H 0,2 – V CAN L 4,8 = – 4,6 Volt (bit 1)
Tensione differenziale minima in modo dominante V CAN H 3,6 – V CAN L 1,4 = + 2,2 Volt (bit 0)
6.9. LIVELLI LOGICI (CAN H E CAN L)
I segnali sul bus CAN sono di tipo differenziale, significa che il valore di tensione associato al bit e’
rappresentato dalla differenza tra due livelli di riferimento (CAN H e CAN L)
Linea C-CAN (500 kb/s)
Linea B-CAN (50 kb/s)
6.10. CARICO DI LAVORO DI UN NODO CAN
La quantità di informazioni che un nodo CAN riversa sulla rete ad esso collegata deve essere
controllata in modo da non creare intasamenti.
Carico di informazioni di un nodo CAN.
1.
2.
3.
4.
5.
Sensore di giri ( rpm)
Nodo Controllo Motore NCM
Nodo CAN (incorporato nella
centralina)
Iniettori (Ti tempo di
iniezione)
Bobine (candele di
accensione)
6.
7.
8.
9.
10.
11.
Resistenze di terminazione
120 Ohm
Microprocessore Nodo
Controllo Motore
CAN controller
Transceiver
Rete CAN alta velocità ( H-L )
Trama o pacchetto dati
immessi nella rete
LIMITI DI CARICO:
Una delle regole da imporre nel protocollo di comunicazione tra i nodi CAN delle stessa rete è quella
del carico massimo di informazioni che possono riversare sulla rete.
CRITICITA’:
Il problema si presenta nel caso di incidenti, quando tutti i nodi si ritrovano con un’enorme quantità di
informazioni di emergenza da riversare sulla rete con il rischio di intasamenti.
NOTA:
Notare che in base alla priorità del messaggio i nodi usano frequenze differenti in trasmissione.
6.11. GESTIONE DELLE PRIORITA’ (COLLISIONI O SOVRAPPOSIZIONI
NON DISTRUTTIVE)
Per fare in modo che due utenti possano accedere al canale di comunicazione senza darne
preavviso e senza disturbarsi a vicenda è necessario fissare delle regole a cui tutti devono attenersi.
Infatti se tutte le centraline elettroniche collegate sulle reti iniziassero a trasmettere
contemporaneamente dei dati, ciò comporterebbe una sovrapposizione di informazioni determinando
errori sul riconoscimento dei dati trasmessi.
Il protocollo del sistema Ve.N.I.C.E. permette di gestire i problemi di sovrapposizione quando più nodi
vogliono emettere una trama contemporaneamente.
A tal proposito, ad ogni centralina viene assegnato in fase di progetto, un codice di “priorità o
arbitraggio”, undici bit, il quale determina in modo univoco il contenuto del frame e la sequenza di
accesso alla linea.
Quindi ogni centralina possiede un codice identificativo che è anche espressione della sua priorità.
FUNZIONAMENTO:
Quando un nodo esprime mediante il bit iniziale la sua intenzione di trasmettere una trama
(messaggio) in rete ed un altro nodo esegue contemporaneamente la stessa operazione, poiché
ambedue leggono (oltre che trasmettere) i segnali sulla rete, quella che rileva una differenza tra il
segnale emesso e quello ricevuto riconosce se un altro nodo sta emettendo un messaggio.
Il nodo che trasmette il messaggio a più bassa priorità interrompe immediatamente la sua
trasmissione a favore di quello a più alta priorità.
RISULTATI:
Praticamente il messaggio ad alta priorità viene trasmesso sulla rete senza alcuna interruzione né
ritardo.
6.12. ESEMPIO DI CONFLITTO TRA DUE NODI (NCM E NFR)
Quando due nodi iniziano a trasmettere contemporaneamente una trama nessuno si accorge di nulla
finché le due trame hanno gli stessi bit. Non appena i due nodi emettono un bit diverso quello che ha
emesso un bit 1 (recessivo) smette di trasmettere a favore di quello che ha emesso il bit 0
(dominante).
Esempio di soluzione di un conflitto di trasmissione tra due nodi CAN.
1.
2.
3.
4.
5.
6.
a.
b.
c.
NCM Nodo Centralina controllo Motore
NFR Nodo Centralina impianto Frenante ABS
Interconnessione
NCR Centralina Cambio Robotizzato
NAS Nodo sensore sterzo
NBC Nodo Body Computer
Trama emessa dal Nodo Controllo Motore NCM
Trama emessa dal Nodo impianto Frenante ABS (NFR): E= perdita di priorità o arbitraggio del
nodo 2, nel punto E
Trama dominante sul BUS del Nodo Controllo Motore
1. Unità elettronica A
2. Unità elettronica B
3. Messaggio sulla rete CAN
Esempio di soluzione di un conflitto di trasmissione tra due nodi CAN.
FUNZIONAMENTO:
Dall’esempio di arbitraggio si nota che i “Nodi“ (1) e (2) inviano contemporaneamente un messaggio
identico fino al quarto bit.
Finché la trama emessa contiene bit uguali i due nodi continuano a trasmettere insieme, (da [A] a [D]
nella figura).
Quando il nodo 2 cerca di trasmettere un bit recessivo (1) e contemporaneamente il nodo 1 trasmette
un bit dominante (0) , Il nodo (2) accorgendosi che il suo messaggio è stato modificato, capisce che
in quel momento c’è un altro nodo che ha una priorità di trasmissione superiore e smette di
trasmettere, ponendosi in ascolto fino a quando il nodo (1) ha liberato la linea.
(istante [E] nella figura).
Da quel momento in poi trasmette solo il nodo 1 perché ha maggiore priorità (da [F] in poi nella
figura).
6.13.
DATA FRAME E REMOTE FRAME
I messaggi più utilizzati sono:
• DATA FRAME
• REMOTE FRAME
Il messaggio di tipo più comune,visto finora, è un tipo di messaggio che serve a trasportare
informazioni ed è il DATA frame.
Permette la trasmissione dei dati da un nodo trasmettitore (TX) a tutti gli altri , che si comportano
quindi come ricevitori (RX); ciascun nodo decide separatamente se ritenere rilevanti i dati ricevuti o
se scartarli
Una delle caratteristiche del protocollo CAN è che un nodo della rete non solo può trasmettere
informazioni o rimanere in attesa di riceverne altre, può anche CHIEDERE informazioni ad altri nodi
della rete” presentando una domanda”.
Per mezzo del REMOTE frame il nodo trasmette una richiesta remote
Un REMOTE frame ha la stessa struttura caratteristica di un DATA frame salvo non avere il campo
DATA.
6.14. SCHEMA DI PRINCIPIO ARCHITETTURA VE.N.I.C.E. DEI
PRINCIPALI NODI
L’impianto elettronico Ve.N.I.C.E. a bordo del veicolo risulta fondamentalmente diverso da uno
tradizionale ma funzionalmente molto più organizzato.
1.
2.
3.
4.
5.
6.
7.
8.
CAB Centralina Air Bag
NCR Nodo Cambio Robotizzato
NCM Nodo controllo motore
NAS Nodo sensore angolo sterzo
NFR Nodo impianto frenante
Resistenza di terminazione su NFR
Linea seriale K
Rete C CAN alta velocità di trasmissione- linea
twistata (controller area network):H = Segnale
alto;L = Segnale basso
9. Resistenza di terminazione su NBC
10. Rete B CAN bassa velocità di trasmissione –
linea parallela ( doppino): H = Segnale alto;L =
Segnale basso
11. NBC Nodo Body Computer (unità master)
12. Presa di diagnosi 16 PIN EOBD (European On
Board Diagnostic)
13. Antenna Alfa Code
14. NIT Nodo Info-Telematico
15. NRR Nodo Radio Ricevitore
16. Antenna GPS – GSM
17. NCL Nodo Climatizzatore
18. NPG Nodo Porta Guidatore
19. NVB Nodo Vano Baule
20. NQS Nodo Quadro Strumenti
21. CAV Centralina sensori volumetrici
22. CSA Centralina sirena antifurto
Schema dei principali nodi dell’architettura Ve.N.I.C.E.
Inoltre il dato di velocità di rotazione viene impacchettato in una trama e inviato sulla rete a tutte le
altre unità elettroniche che sono interessate a tale informazione.
6.15. ESEMPIO DI CONDIVISIONE DELL’INFORMAZIONE
Il vantaggio principale dell’uso delle reti CAN risiede nella possibilità di condividere la stessa
informazione tra tutti i nodi della rete.
1.
2.
Sensore di giri motore
Sensorevelocittà ruote (NFR)
3.
4.
5.
6.
7.
8.
9.
10.
11.
NCM Nodo controllo motore
NFR Nodo impianto frenante
NCR Nodo Cambio Robotizzato
Interconnessione
NAS Nodo sensore angolo sterzo
NCL Nodo Climatizzatore
NQS Nodo quadro strumenti
Lunotto termico
Sensore temperatura esterna
12.
13.
14.
15.
16.
17.
18.
A.
B.
NBC Nodo Body Computer
Centralina plancia CPL
NIT / NRR Nodo Info-telematico
NPG Nodo Porta Guidatore
Interconnessione
Interconnessione
NVB Nodo Vano Baule
Trama 1
Trama 2
Esempio di condivisione delle stessa informazione tra più nodi.
ESEMPIO DI CONDIVISIONE DI UNA MISURA:
Il nodo controllo motore rileva la velocità di rotazione dal sensore (1) e immette l’informazione in rete.
Ogni altro nodo legge il messaggio e decide se usare o meno l’informazione in esso contenuta:
• Il nodo quadro strumenti (NQS) la usa per pilotare la lancetta del contagiri.
• Il nodo selespeed (NCR) la usa per gestire e pilotare il cambio marce.
• ecc.
ESEMPI CONDIVISIONE
La funzione principale del Gateway consiste nello scambio di informazioni fra i due sistemi che
operano a velocità diverse. (dall'inglese, portone, passaggio)
Il principio di un Gateway può essere spiegato con l’ esempio di una stazione ferroviaria.
Sul marciapiede A di una stazione ferroviaria arriva il treno rapido (C CAN, 500 kBit/s) con centinaia
di passeggeri. Sul marciapiede B è già pronto il tram (B CAN 50 kBit/s). Alcuni passeggeri cambiano e
prendono il tram, altri passeggeri sono arrivati con il tram per proseguire con il più veloce treno
rapido.
La funzione di una stazione ferroviaria/un marciapiede di stazione, ossia la possibilità per i passeggeri
di cambiare mezzo di trasporto, nella fattispecie arrivando con un mezzo locale e salendo su un
mezzo più veloce per giungere al luogo di destinazione o viceversa, descrive perfettamente il compito
del Gateway come un collegamento di rete fra i due sistemi bus dati.
A Marciapiede A
B Marciapiede B
C Tram (Bus dati B CAN)
D Treno Rapido (BUS dati C CAN)
E Passeggeri che cambiano
ESEMPI CONDIVISIONE
1.
2.
3.
LHRPulseCounter
RHRPulseCounter
TravelDistance (segnale odometrico)
B Indicazione Odometrica
C Manutenzione programmata
D Segnale odometro totale.
E Gestione agenda
F Trip Computer
A Reset odometro da pulsante
G Navigazione GPS
Strategie gestite dal NFR
Il NFR trasmette su C-CAN gli impulsi contati dai sensori delle ruote posteriori utilizzando due segnali
(LHRPulseCounter e RHRPulseCounter). (I segnali hanno una risoluzione pari a 96 impulsi / giro
ruota).
Strategie gestite dal NBC
Il NBC riceve via C-CAN i contatori cumulativi <LHRPulseCounter> e <RHRPulseCounter> degli impulsi
acquisiti dal NFR attraverso i sensori di ruota fonica delle ruote posteriori.
A partire dai valori ricevuti, il NBC calcola la distanza relativa (segnale odometrico) percorsa dalla
vettura e la trasmette su rete B-CAN e C-CAN, utilizzando il segnale <TravelDistance> con risoluzione
di [1 bit / 9.8 m]. Nel caso di avaria di uno dei sensori delle ruote posteriori, il NBC calcola il segnale
odometrico a partire soltanto da quello disponibile.
Il NBC replica i segnali LHRPulseCounter e RHRPulseCounter e i relativi bit di avaria sulla rete B-CAN.
Contributo alla funzione
NFR ·
Acquisizione impulsi giro ruota delle ruote posteriori.
Elaborazione e trasmissione segnali giro ruota e relativi bit di avaria su C-CAN.
NBC
· Acquisizione segnali giro ruota e relativi bit di avaria da C-CAN.
· Calcolo e trasmissione su C-CAN e B-CAN del segnale odometrico.
· Gateway (C-CAN -> B-CAN) dei segnali giro ruota e relativi bit di avaria.
NAB · Acquisizione segnale odometro totale.
NCM · Acquisizione segnale odometrico.
NQS
· Acquisizione segnale odometrico da rete B-CAN.
· Acquisizione comando di Reset odometro da pulsante.
· Trasmissione su rete B-CAN del segnale odometro totale.
· Gestione indicazione odometrica.
ARCHITETTURA F.L.ORE.N.C.E.
Il sistema MINI F.L.Ore.N.C.E. è stato concepito per la gesione ottimale delle funzioni elettriche ed
elettroniche dell’autoveicolo.
Il sistema interagisce con tutte le funzioni dell’impianto elettrico, controllando direttamente le
cosiddette funzioni di carrozzeria (visibilità, accesso, infotainment di bordo, comfort, telematica, ecc)
e supportando l’interscambio dati tra i vari sistemi di controllo trazione (motore, frenatura, cambio,
ecc.).
Per l’ottimizzazione dell’impianto, ogni centralina (elettronica o elettromeccanica) è posta in posizione
baricentrica rispetto alle funzioni da essa gestite. Questo permette di minimizzare l’impianto di
distribuzione della potenza e dei segnali, anche mediante l’utilizzo esteso delle reti di comunicazione
seriale., favorendo la soluzione delle problematiche di ingombro, affidabilità, peso, costo.
VANTAGGI: con impianti come il MINI F.L.Ore.N.C.E. vengono ottenuti i seguenti vantaggi:
- i sensori presenti nei vari sottosistemi si rendono disponibili sulla rete;
- le informazioni possono essere condivise;
- si elimina la presenza di sensori simili;
- possono essere aggiunte nuove funzioni solo attraverso modifiche del software;
- si semplifica la progettazione dei cablaggi e diminuisce il numero dei connettori;
- si incrementa la sicurezza di funzionamento dei dispositivi elettronici migliorando la affidabilità
delle informazioni trasmesse;
- si ha una funzione diagnostica integrata semplificando le operazioni di assistenza sui componeneti
elettrici ed elettronici.
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
centralina sospensioni controllate (CSC)
centralina Airbag (CAB)
centralina fanale destro (CFD)
centralina fanale sinistro (CFS)
nodo leva selezione cambio (NSC)
nodo cruise control adattativi (NAC)
nodo guida elettrica (NGE)
nodo cambio automatico (NCA) / nodo cambio
robotizzato (NCR)
nodo controllo motore (NCM)
nodo impianto frenante (NFR)
nodo angolo sterzata (NAS)
rete C-CAN
linea seriale K
Body computer (NBC)
linea K
linea A bus
centralina pressione pneumatici (CPP)
centralina sirena antifurto (CSA)
modulo elettronico devioguida (DEV)
centralina sensore di pioggia / crepuscolare (CSP)
centralina allarme volumetrico (CAV)
rete B_CAN
23. presa di diagnosi 16 PIN EOBD
24. antenna Fiat CODE
25. nodo info –telematico (NIT) / nodo radio ricevitore
(NRR)
26. nodo climatizzatore (NCL)
27. nodo passive entry (NPE)
28. nodo vano baule (NVB)
29. nodo blocca sterzo (NBS)
30. nodo sensori parcheggio (NSP)
31. nodo assetto guida (NAG)
32. nodo assetto passeggero (NAP)
33. nodo porta guidatore (NPG)
34. nodo porta passeggero (NPP)
35. nodo volante (NVO)
36. nodo quadro strumenti (NQS)
37. resistenze di terminazione (incorporate)
38. interfaccia di comunicazione (transceiver)
39. BUS
40. CD changer
41. antenna GPS, GSM, radio
42. amplificatore audio Hi-Fi
43. antenna Passive Entry
44. sensore parcheggio
La struttura dell’impianto si compone di:
- 2 reti di comunicazione CAN che collegano NODI appartenenti a due diverse aree: una per il
controllo dinamico del veicolo ed una per le funzioni di carrozzeria;
- 1 linea seriale W per recovery immobilizer;
- Diverse linee seriali K per la diagnosi di alcuni nodi / centraline;
- 1 linea seriale chiamata
- A-BUS.
- COLLEGAMENTO A- BUS
La linea seriale A-BUS ha lo scopo di garantire lo scambio di informazioni / comandi tra diverse
centraline elettroniche.
Queste centraline sono:
- sirena antifurto;
- allarme volumetrico;
- modulo elettronico devioguida;
- sensore pioggia / crepuscolare;
- nodo body computer;
- centralina pressione pneumatici;
La velocità di trasmissione della A-BUS è di 4,8 kbit/sec;
La comunicazione sulla A-BUS è realizzata mediante lo scambio di pacchetti di dati tra le diverse
centraline; ogni centralina collegata all’A-BUS ha un suo proprio indirizzo elettronico; quando una
centralina deve inviare un comando / informazione ad un’altra centralina, deve sempre inserire nel
pacchetto dati l’indirizzo della centralina destinataria.
6.16. COLLEGAMENTO LINEA K
Nell’impianto MINI FLorence, le linee K permettono l’esecuzione della diagnosi con strumento
diagnostico dei seguenti nodi:
• Nodo Adaptive Cruise Control (NAC);
• Nodo Guida Elettrica (NGE);
• Nodo Cambio Automatico / Cambio Robotizzato (NCA / NCR);
• Nodo Controllo Motore (NCM);
• Nodo Freni (NFR);
• Centralina Pressione Pneumatici (CPP);
• Centralina Air Bag (CAB);
• Centralina Controllo Sospensioni (SCS);
Esiste inoltre una linea K per la gestione del funzionamento e della diagnosi delle Centraline
Proiettore Sinistro e Proeiettore Destro (CPS / CPD).
All’interno del Body Computer è prevista la linea seriale W con il NCM per recovery Immobilizer.
6.17. RETI SERIALI LIN
A Motorini scatola Climatizzatore
B Comandi Posteriori
LIN (Local Interconnect Network) è un protocollo seriale di comunicazione a filo singolo basato
sull’interfaccia comune SCI (UART) byte-word.
L’accesso in una rete LIN è controllato da un nodo master che non richiede gestione dell’arbitraggio né
delle collisioni nei nodi slave.
Una caratteristica particolare del sistema LIN è il meccanismo di sincronizzazione che consente il
ripristino del clock mediante i nodi slave senza quarzo né risonatore ceramico.
I nodi della rete LIN non utilizzano le informazioni sulla configurazione di sistema, tranne che per la
denominazione del nodo master.
I nodi possono essere aggiunti alla rete LIN senza richiedere modifiche di hardware o software negli altri
nodi slave.
La dimensione di una rete LIN è tipicamente inferiore ai 12 nodi (sebbene questo non sia un vincolo), in
virtù del numero limitato di identificatori (64) e della velocità di trasmissione relativamente bassa.
La sincronizzazione del clock, la semplicità della comunicazione UART e il mezzo a filo singolo sono i
fattori principali che rendono la linea LIN una soluzione economicamente efficiente.
6.18. MISURE ELETTRICHE SU RETE C-CAN E B-CAN
Con l’avvento/arrivo delle normative antinquinamento europee, i veicoli del gruppo sono stati dotati
di un idoneo connettore denominato “EOBD”.
Dal connettore EOBD è possibile rilevare valori resistivi e tensioni relative alle reti.
Questa operazione NON DEVE ESSERE ESEGUITA DIRETTAMENTE SUL CONNETTORE (si potrebbe
danneggiare) e necessario interporre una interfaccia
Boccola
Linea
Note
2
Can – H
5
Can - L
6
Can - A
3
Can - B
1
---
+ Batteria ( 12 Volt )
4
---
Massa di potenza
C - CAN
B - CAN
Posizione dei puntali di misura per il collegamento tra interfaccia e apparecchiature di misura:
Presa Diagnosi EOBD
Legenda pin out presa diagnosi EOBD
Pin
Funzione
1
Linea K per NFR / ABS
2
C-CAN H ( BUS - )
3
Linea K per AIR / BAG
4
Massa di potenza
5
Massa di segnale (massa logica )
6
B-CAN (B) per diagnosi ( CAN + )
7
Diagnosi linea K
8
Linea K Immobilizer ( Code )
9
Linea diagnostica K cablaggio plancia
10
C-CAN L ( BUS + )
11
Linea diagnostica allarme + bloccaporte
12
Linea diagnostica K cablaggio vano motore
13
Linea diagnostica K cablaggio posteriore
14
B-CAN (A) per diagnosi ( CAN - )
15
Linea diagnostica L
16
+ Batteria ( 12Volt ) da F-39
Gli strumenti per le misure elettriche sono:
• Multimetro digitale
• Examiner SMART con scheda SAM, utilizzati nelle funzioni ohmmetro voltmetro e voltmetro
grafico.
Si ricorda che, le misure elettriche con Examiner devono avvenire con il morsetto negativo di
alimentazione collegato a massa veicolo e le misure di resistenza devono essere eseguite con
BATTERIA SCOLLEGATA.
Comunque i valori descritti vanno interpretati con il 20% di tolleranza.
6.19. RETE C-CAN
Nella tabella sotto riportata sono evidenziati i valori coretti in verde , mentre in arancione i valori
errati della rete C-Can relaitivi ad una ALFA 159
C001
Punto di misura
Valore
Note
4-5
GND / C-Can -L
2,4 V circa
rete Ok
4-2
GND / C-Can -H
2,6 V circa
rete Ok
C002
Punto di misura
Valore
Note
4-5
GND / C-Can -L
3 mV
C.C. tra Can-H e GND
4-2
GND / C-Can -H
240 mV
C.C. tra Can-H e GND
C003
Punto di misura
Valore
Note
4-5
GND / C-Can -L
8 mV
C.C. tra Can-L e GND
4-2
GND / C-Can -H
700 mV
C.C. tra Can-L e GND
C004
Punto di misura
Valore
Note
4-5
GND / C-Can -L
11,80 V
C.C. tra Can-L e + Batt.
4-2
GND / C-Can -H
11, 20 V
C.C. tra Can-L e + Batt.
C005
Punto di misura
Valore
Note
4-5
GND / C-Can -L
11, 20 V
C.C. tra Can-H e + Batt.
4-2
GND / C-Can -H
11,80 V
C.C. tra Can-H e + Batt.
C006
Punto di misura
Valore
Note
4-5
GND / C-Can -L
2,48 V
C.C. tra Can-L e Can-H
4-2
GND / C-Can -H
2,48 V
C.C. tra Can-L e Can-H
C007
Punto di misura
Valore
Note
Chiave Avv.
Key - on
Chiave Avv.
Key - on
Chiave Avv.
Key - on
Chiave Avv.
Key - on
Chiave Avv.
Key - on
Chiave Avv.
Key - on
Chiave Avv.
4-5
GND / C-Can -L
11,80 V
C.C. tra ( Can-L / Can-H ) e + Batt.
4-2
GND / C-Can -H
11,80 V
C.C. tra ( Can-L / Can-H ) e + Batt.
Key - on
C008
Punto di misura
Valore
Note
2-5
C-Can - H / C-Can – L
60 Ohm circa
rete Ok
2-5
C-Can - H / C-Can – L
120 Ohm / infinito
C.A. linea Can-L o Can-H
Chiave Avv.
Key-off
e
Batt. staccata
Nella figura sottostante sono evidenziati i punti di misura per la verifica dell’integrità del circuito elettrico e
delle resistenze di stabilizzazione delle rete C-Can, poste all’interno del primo nodo e dell’ultimo nodo della
linea Bus.
Dopo aver portato la chiave su stop i messaggi sulla rete C – CAN vengono inibiti.
In pratica la rete viene addormentata dopo 9-18 secondi dal Key-Off.
Di seguito viene raffigurato l’andamento della tensione nel tempo catturato con lo “Voltmetro
grafico” di Examiner.
Detti valori vanno interpretati con il 20% di tolleranza.
C0009
2-5
Punto di misura
C-Can - H / C-Can – L
Valore
Vedi grafico
Note
Passaggio da Key-on a Key-off.
Chiave Avv.
Key - on
La trasmissione del messaggio o propagazione del segnale C - CAN (velocità 500 Kb/s) è possibile grazie
alla presenza di due resistenze di terminazione poste sui nodi più lontani tra loro.
Il segnale è caratterizzato dall’avere una tensione massima di 5 volt con un riferimento di tensione
media di 2,5 volt ovvero:
RETE B-CAN
Nella tabella sotto riportata sono evidenziati i valori coretti in verde , mentre in arancione i valori
errati della rete B-Can:
B001
Punto di misura
Valore
Note
Chiave Avv.
4–3
GND / B-Can -B
4,5 V circa
rete Ok
Key - on
4–6
GND / B-Can -A
0,5 V circa
rete Ok
B002
Punto di misura
Valore
Note
4–3
GND / B-Can -B
12 V
rete Ok ( Sleep )
4–6
GND / B-Can -A
0V
rete Ok ( Sleep )
Chiave Avv.
Key - on
N.B. : un breve impulso di massa ( GND ) sulla linea (B-Can – B) la Rete passa dalla condizione Sleep
a quella Attiva.
B003
Punto di misura
Valore
Note
4-3
GND / B-Can -B
0V
C.C. tra Can-L e GND
4-6
GND / B-Can -A
0,5 V circa
C.C. tra Can-L e GND
B004
Punto di misura
Valore
Note
4-3
GND / B-Can -B
4,5 V circa
C.C. tra Can-H e GND
4-6
GND / B-Can -A
0V
C.C. tra Can-H e GND
B005
Punto di misura
Valore
Note
4-3
GND / B-Can -B
4,5 V circa
C.C. tra Can-H e + Batt.
4-6
GND / B-Can -A
11,85 V circa
C.C. tra Can-H e + Batt.
B006
Punto di misura
Valore
Note
4-3
GND / B-Can -B
11,85 V circa
C.C. tra Can-L e + Batt.
4-6
GND / B-Can -A
0,5 V circa
C.C. tra Can-L e + Batt.
Chiave Avv.
Key - on
Chiave Avv.
Key - on
Chiave Avv.
Key - on
Chiave Avv.
Key - on
B007
Punto di misura
Valore
Note
4-3
GND / B-Can -B
0,5 V circa
C.C. tra Can-L e Can-H
4-6
GND / B-Can -A
0,5 V circa
C.C. tra Can-L e Can-H
B008
Punto di misura
Valore
Note
4-3
GND / B-Can -B
11,85 V circa
C.C. tra ( Can-L / Can-H ) e + Batt.
4-6
GND / B-Can –A
11,85 V circa
C.C. tra ( Can-L / Can-H ) e + Batt.
Chiave Avv.
Key - on
Chiave Avv.
Key - on
Dopo aver portato la chiave su stop i messaggi sulla rete B – CAN vengono inibiti.
In pratica la rete viene addormentata (Sleep) dopo 90 - 280 secondi dal chiave su stop.
Di seguito viene raffigurato l’andamento della tensione nel tempo catturato con lo “Voltmetro
grafico” di Examiner per la funzione “Sleep” B CAN.
Detti valori vanno interpretati con il 20% di tolleranza
B009
3-6
Punto di misura
B-Can - A / B-Can – B
Valore
Vedi grafico
Note
Passaggio da Key-on a Key-off.
Chiave Avv.
Key - on
La trasmissione del messaggio o propagazione del segnale B - CAN (velocità 50 Kb/s) è caratterizzata
dall’avere una tensione massima di 5 volt con un riferimento di tensione media di 2,5 volt ovvero:
7.
CODICI COLORI FILI ELETTRICI
Ogni cavo rappresentato negli schemi elettrici è caratterizzato da un codice (di una o due lettere) che
ne identifica il colore, secondo la tabella seguente.
Nei cavi con colorazione combinata, il primo colore indicato à quello predominante.
Esempio = Filo RV = cavo rosso con rigatura verde
Colore cavo
Codice
NERO
N
BIANCO
B
AZZURRO
A
MARRONE
M
GIALLO
G
ROSSO
R
VERDE
V
GRIGIO
H
ROSA
S
ARANCIONE
C
VIOLA
Z
BLU
L
8.
PIN OUT NODI RETE C-CAN E B-CAN
Input
Colore filo
Verde
Marrone
PIN CAN-H
PIN CAN-L
ALFA ROMEO 159 1.9 – 2.2 – 3.2 JTS
RETE C CAN
Codice
Descrizione Componente
Connettore
M001
K074
K058
M010
M050
E8010
Body Computer
Sensore Imbardata
Sensore Sterzo
Centralina Controllo Motore
Centralina ABS
Presa di Diagnosi
B
/////
2
3
64
2
/////
A
Output
Colore filo
Verde
Marrone
PIN CAN-H
PIN CAN-L
/////
3
1
86
1
/////
37
4
4
63
/////
ALFA ROMEO 159 1.9 - 2.2 - 3.2 JTS
RETE B-CAN
Colore filo
Bianco-Rosa Nero-Rosa
Codice
Descrizione Componente
Connettore
Pin Can-A
Pin Can-B
M001
Body Computer
H
25
24
M162
Centralina Bluetooth
A
14
30
M060
Centralina Ari Bag
A
7
8
M084
Centralina Sensori Parcheggio
A
7
14
P020
Autoradio
A
3
1
H003
Dispositivo di Accensione
8
3
M089
Centralina Bloccasterzo
2
3
D047
Giunzione Contatto Spiralato
4
3
M070
Centralina Climatizzatore Aut.
10
11
M070
Centralina Climatizzatore Manual.
12
13
M001
Body Computer
I
5
6
E050
Quadro Strumenti
A
3
4
A
36
5
2
85
/////
B002
Centralina di Derivaz. Sotto Plancia
D
10
28
H066
Comando Sedile Lato Guida
B
6
5
H067
Comando Sedile Lato Passeggero
B
6
5
M066
Centralina Porta Lato Guida - Higt
B
16
15
M066
Centralina Porta Lato Guida - Low
B
16
15
M067
Centralina Porta Lato Passeggero
B
16
15
M063
Centralina Vano Baule
B
87
47
M001
Body Computer
C
14
6
E8010 Presa di Diagnosi
ALFA ROMEO 159 1.9 - 2.2 - 3.2 JTS
RETE SERIALE A-BUS
Colore filo
Codice
Descrizione Componente
Connettore
Pin
Rosa-Rosso
M001
Body Computer
B
25
H005
Devioguida
A
2
P090
Sirena Allarme
2
Rosa-Verde
M001
Body Computer
P065
Retrovisore interno elettrocromatico
G010
Sensore antisollevamento
D
7
3
C
4
9.
SCHEMI ELETTRICI RETE - CAN
SCHEMA ELETTRICO RETE C-CAN - ALFA ROMEO 159 1.9 - 2.2 - 3.2 JTS
SCHEMA ELETTRICO RETE B-CAN - ALFA ROMEO 159 1.9 - 2.2 - 3.2 JTS
SCHEMA ELETTRICO RETE B-CAN - ALFA ROMEO 159 1.9 - 2.2 - 3.2 JTS
SCHEMA ELETTRICO RETE A-BUS - ALFA ROMEO 159 1.9 - 2.2 - 3.2 JTS
10.
PIN OUT NODI RETE C-CAN E B-CAN LANCIA YPSILON T.T
Marca
Lancia
Lancia
Lancia
Modello
Ypsilon
Ypsilon
Ypsilon
Versione
1.2 8V
1.2 16V 1.4 16V
1.3 Multijet
Lancia Y 1.2 8V
RETE C CAN
Colore Filo
Verde
Codice
Descrizione Componente
M001
M010
M050
M054
K074
M086
Body Computer
Centralina Contr. Motore
Centralina ABS
Centralina Cambio Rob.
Sensore Imbardata
Centralina Guida Elettrica
Codice
M001
M010
M050
M054
K074
M086
Descrizione Componente
Body Computer
Centralina Contr. Motore
Centralina ABS
Centralina Cambio Rob.
Sensore Imbardata
Centralina Guida Elettrica
Connettore
B
A
Marrone
Pin Can H
Pin Can L
37
20
36
29
B
M001
M010
M050
M054
K074
M086
Body Computer
Centralina Contr. Motore
Centralina ABS
Centralina Cambio Rob.
Sensore Imbardata
Centralina Guida Elettrica
Codice
M001
M010
M050
M054
K074
M086
Descrizione Componente
Body Computer
Centralina Contr. Motore
Centralina ABS
Centralina Cambio Rob.
Sensore Imbardata
Centralina Guida Elettrica
Pin Can H
Pin Can L
Verde
Bianco
Pin Can H
Marrone
Giallo
Pin Can L
2
1
Connettore
B
A
2
3
Marrone
Giallo
Verde
Nero
Marrone
Bianco
Marrone
Nero
Giallo
Verde
Pin Can L
Pin Can H
Pin Can L
Pin Can H
Pin Can H
33
19
4
7
3
5
45
2
A
B
Colore Filo
Verde
Descrizione Componente
Nero
A
Lancia Y 1.2 -1.4 16 V
RETE C CAN
Codice
Rosso
Connettore
B
A
Marrone
Rosso
Nero
Pin Can H
Pin Can L
Verde
Bianco
Pin Can H
Marrone
Giallo
Pin Can L
60
2
28
1
Pin Can H
Pin Can L
37
11
36
43
2
3
Marrone
Giallo
Verde
Nero
Marrone
Bianco
Marrone
Nero
Giallo
Verde
Pin Can L
Pin Can H
Pin Can L
Pin Can H
Pin Can H
33
19
4
7
3
5
45
2
A
B
Connettore
B
A
A
B
Lancia Y 1.3 Multijet
RETE C CAN
Colore Filo
Verde
Codice
Descrizione Componente
Connettore
M001
M010
Body Computer
Centralina Contr. Motore
M050
Centralina ABS
M054
K074
Centralina Cambio Rob.
Sensore Imbardata
A
M086
Centralina Guida Elettrica
B
B
A
Codice
Descrizione Componente
M001
Body Computer
Connettore
B
M010
M050
Centralina Contr. Motore
Centralina ABS
A
M054
Centralina Cambio Rob.
A
K074
M086
Sensore Imbardata
Centralina Guida Elettrica
B
Marrone
Rosso
Nero
Pin Can H
Pin Can L
Pin Can H
Pin Can L
37
64
36
40
18
86
Verde
Bianco
Pin Can H
Marrone
Giallo
Pin Can L
2
1
2
3
Marrone
Giallo
Verde
Nero
Marrone
Bianco
Marrone
Nero
Giallo
Verde
Pin Can L
Pin Can H
Pin Can L
Pin Can H
Pin Can H
33
19
4
7
3
5
45
2
LANCIA Y
Colore filo
RETE B-CAN
Codice
Descrizione Componente
Bianco-Rosa
Nero-Rosa
Connettore
Pin Can-A
Pin Can-B
M001
Nodo Body Computer
B
26
27
M001
Nodo Body Computer
I
5
6
M070
Nodo Centralina Climatizzatore
A
1
2
M050
Nodo Controllo Motore
A
3
4
M066
Nodo Porta Guida Low
A
12
11
M067
Nodo Porta Passeggero High
B
16
15
M066
Nodo Porta Guida High
B
16
15
P020
Nodo RadioRicevitore
A
3
1
B002
Centralina Derivazione Sottoplancia
H
17
5
B002
Centralina Derivazione Sottoplancia
D
10
28
SCHEMA ELETTRICO C CAN LANCIA YPSILON T.T
SCHEMA ELETTRICO B CAN LANCIA YPSILON T.T