Capitolo 5
Oscillazioni
5.1 Nozione di equilibrio
Un sistema fisico è normalmente descritto tramite un insieme di coordinate
e di velocità (rapidità di variazione delle coordinate stesse). L’esempio più
semplice è dato dalle usuali coppie coordinate cartesiane - velocità, (x, vx )
ad esempio, che descrivono il moto di una particella. Ma abbiamo visto
anche sistemi non meccanici in cui le variabili sono diverse, ad esempio la
coppia carica-corrente che incontriamo in un circuito elettrico. In molti di
questi sistemi ha importanza il concetto di equilibrio. Questo concetto ha
diverse accezioni, la più semplice è la seguente:
Un sistema descritto da una coordinata q, si dice all’equilibrio se esiste un punto con coordinata qE tale che se
il sistema ha questa coordinata e ha anche velocità (rapidità di variazione della coordinata) nulla, la coordinata
stessa resta costante al valore di equilibrio qE
In poche parole, il sistema “fermo inizialmente nella posizione di equilibrio “resta fermo.
Per semplicità scegliamo un sistema particolarmente semplice con il quale
abbiamo già illustrato molti dei principi della meccanica. Pensiamo dunque
ad un punto materiale, di massa m, che si muove lungo una retta. La
posizione della particella è, dunque, descritta da una sola coordinata x e la
velocità è, al solito, definita da v = dx/dt.
Sappiamo che il moto di questo corpo è soggetto alla legge di Newton
ma = F
(1.1)
La forza F può essere molto complessa. Per il momento assumeremo che essa
possa dipendere solo dalla coordinata x del corpo, cioè il corpo in posizioni
1
2
diverse può subire forze differenti. Esplicitiamo ora il contenuto della (1.1),
sostituendo la definizione di accelerazione e di velocità e otteniamo il sistema:
v=
m
dx
dt
dv
= F (x)
dt
(1.2)
I moti possibili del corpo soggetto alla forza F sono rappresentati dalla legge
oraria x(t) e devono soddisfare il sistema precedente, ossia se si sostituisce
la funzione x(t) nel sistema precedente si devono trovare due identità. Se un
certo sistema ammette delle posizioni di equilibrio vuol dire che il sistema
(1.2) ammette come soluzione il moto di un corpo che resta fermo in un
punto di coordinate xE = costante. Formalmente, questo significa che le
equazioni del moto (1.2) ammettono come soluzione
x(t) = xE
Sostituendo nella (1.2) vediamo che una condizione necessaria (e sufficiente)
affinché questo avvenga è che
F (xE ) = 0
(1.3)
Infatti sostituendo nella seconda x(t) = xE si vede che la velocità non cambia
(la sua derivata è nulla) se F (xE ) = 0 ossia, la forza nel punto di equilibrio
deve essere nulla. È bene chiarire un punto: l’esistenza di un punto di
equilibrio dice che il corpo può stare fermo in tal punto, non che deve star
fermo, per stare fermo anche la velocità iniziale deve essere nulla. Gli esempi
di questo tipo di moto sono innumerevoli, si pensi ad una pallina che sta sul
fondo di una ciotola, o sulla sommità di una ciotola rovesciata oppure ad un
corpo che galleggia in acqua ferma.
Es.1
Un corpo di massa m è vincolato a muoversi lungo una retta. Nella posizione individuata
dalla coordinata x il corpo è soggetto alla forza F (x) = ax2 − b dove a = 3 N/m2 e b = 3 N .
Trovare le posizioni di equilibrio del sistema.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
3
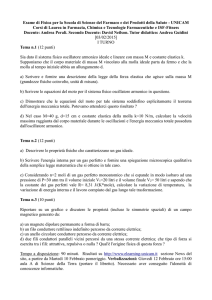
Tipi di equilibrio
È chiaro dalla figura precedente che, dato un punto di equilibrio, si possono
verificare due situazioni diametralmente opposte
• Se si sposta di poco il corpo la forza tende a riportarlo all’equilibrio
(è il caso della pallina sul fondo di una ciotola o quello di un corpo
galleggiante).
• Se si sposta di poco il corpo questo si allontana senza ritorno dall’equilibrio (è il caso della pallina sulla sommità della ciotola rovesciata).
Nel primo caso si parla di equilibrio stabile, nel secondo di equilibrio
instabile1
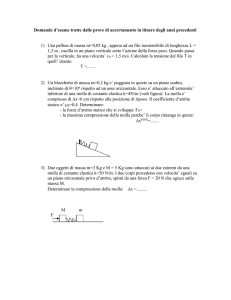
I due tipi di equilibrio possono essere compresi ricorrendo ancora una
volta al moto unidimensionale di un punto materiale. In figura è mostrato
il grafico della forza F (x) cui il corpo è soggetto e che dipende dalla posizione del corpo. Il fatto che esista un punto di equilibrio xE è illustrato
nel grafico dal passaggio della forza attraverso l’asse orizzontale (ossia dall’annullamento di F ), per un particolare valore della x. Come è evidente dal
confronto tra le due figure il passaggio può avvenire in due modi: andando
da forze positive (dirette nel verso positivo della x) a forze negative come è
nel grafico di sinistra o viceversa. Consideriamo il primo caso e supponiamo
che un corpo sia posto fermo nella posizione di equilibrio e spostiamolo un
poco nella direzione positiva delle x. Nella nuova posizione il corpo è soggetto ad una forza negativa che tende a riportarlo verso il punto di equilibrio.
Analogamente, se spostiamo il corpo nel verso negativo esso risente di una
forza positiva che tende a ripristinare l’equilibrio. Quindi in questo caso
l’equilibrio è stabile.
Es.2
Ripetere per il grafico di destra il ragionamento espresso sopra e si mostri perché in questo
secondo caso l’equilibrio è instabile.
1
Omettiamo, per brevità, l’eventualità che ci sia un continuo di punti di equilibrio,
come nel caso di un corpo poggiato su un tavolo orizzontale, o altri casi simili.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
4
È piuttosto intuitivo che il caso di equilibrio stabile è di importanza
cruciale in Natura, anche in Biologia. I meccanismi di omeostasi possono essere visti come una generalizzazione del concetto qui sopra esposto.
Quando un sistema è spostato dalla sua posizione di equilibrio si sviluppano
forze che tendono a ripristinare l’equilibrio stesso. L’equilibrio instabile è
invece importante in quanto segnala appunto una instabilità del sistema
e le conseguenze di questa situazione in Biologia possono essere piuttosto
drammatiche, come è facile immaginare. Una perturbazione anche piccola che sposti il sistema dal suo stato di equilibrio è seguita dall’insorgere di
forze che tendono ad allontanare ulteriormente il sistema dall’equilibrio. Nel
seguito ci occuperemo principalmente degli equilibri stabili.
Approssimazione della forza vicino ad un punto di equilibrio
La cosa interessante è che tutti i moti in vicinanza di un punto di equilibrio
stabile possono essere descritti nello stesso modo ed essenzialmente in termini di un unico parametro. Alla base di questa osservazione vi è una proprietà
intuitiva delle funzioni su cui siamo ritornati molte volte. Per illustrarla torniamo al caso del moto unidimensionale di una particella e al grafico della
forza che ammette un punto di equilibrio stabile. Come avviene sempre, se
non ci allontaniamo troppo da un punto x0 ogni funzione è approssimabile
con una retta. Se la funzione non varia rapidamente questa approssimazione
è valida in un ampio intervallo, ma, in ogni caso, pur di fare l’intervallo abbastanza piccolo è possibile approssimare ogni funzione, nell’intorno di un
suo punto x0 con una retta passante per il punto. Avendo studiato il concetto di derivata sappiamo anche che la retta che meglio approssima la funzione
y = f (x) nel punto x0 ha come coefficiente angolare proprio la derivata f 0
della funzione calcolata nel punto x0 . L’approssimazione si scrive dunque:
f (x) = f (x0 ) + f 0 (x0 )(x − x0 )
Es.3
(1.4)
Si adoperi l’approssimazione 1.4 per calcolare cos(50◦ ) conoscendo le funzioni trigonomet-
riche a θ = 45◦ = π/4 rad. Si ricordi che i calcoli vanno eseguiti con gli angoli espressi in radianti.
Controllare la approssimazione ottenuta con il risultato esatto, ottenibile con una calcolatrice.
Torniamo allora alla forza dipendente dalla posizione secondo la funzione
F (x). Per i nostri scopi basta notare che nei due grafici di F (x), l’ordinata di
F (x) in xE è nulla e in un caso la derivata è negativa (funzione decrescente)
e nell’altro la derivata è positiva (funzione crescente). Se chiamiamo k un
numero positivo si ha nei due casi illustrati che la forza vicino al punto di
equilibrio xE è approssimata da espressioni:
F
= −k(x − xE ) = −ks ⇒ equilibrio stabile
F
= +k(x − xE ) = +ks ⇒ equilibrio instabile
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
(1.5)
5
Nei due casi la forza è proporzionale allo spostamento dall’equilibrio s =
(x − xE ), ma solo nel primo caso si ha la stabilità dell’equilibrio.
5.1.1 Moto vicino ad un punto di equilibrio stabile
Descriviamo allora il moto di un sistema vicino al punto di equilibrio stabile,
tenendo conto della approssimazione lineare della forza secondo la prima
delle equazioni (1.5). L’equazione del moto si scrive immediatamente:
m
d2 x
= −k(x − xE )
dt2
ma per semplicità conviene usare come coordinata che descrive la posizione
del corpo lo spostamento s = x − xE dalla posizione di equilibrio. Esprimendo x in funzione di s si ha:
x = s + xE
ovvero x ed s differiscono per una costante e quindi hanno le derivate di
ogni ordine uguali e in particolare:
d2 x
d2 s
=
dt2
dt2
Si può quindi riscrivere l’equazione del moto per s:
m
d2 s
= −ks
dt2
ovvero, per uno specifico punto di equilibrio, caratterizzato da una costante
k, la derivata seconda dello spostamento dall’equilibrio dipende dal solo
parametro k/m:
d2 s
k
=− s
(1.6)
2
dt
m
come si legge nell’equazione precedente k/m ha le dimensioni dell’inverso di
un tempo al quadrato ed è quindi espresso con le unità sec−2 . L’inverso della
grandezza vale m/k ed ha le dimensioni di un tempo al quadrato. La sua
radice ha le dimensioni di un tempo e ci aspettiamo che questo sia un tempo
caratteristico del moto attorno ad un punto di equilibrio stabile, almeno per
spostamenti non troppo grandi per i quali l’approssimazione lineare della
forza è soddisfacente.
5.1.2 Soluzione generale dell’equazione del moto
Una volta impostata la equazione del moto la possibilità di ricavare tutte le
sue soluzioni è un problema matematico che può essere più o meno difficile
o in certi casi impossibile. Per il moto unidimensionale si tratta di trovare
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
6
tutte le funzioni che risolvono l’equazione e che hanno come parametri che le
distinguono la posizione e la velocità iniziale del corpo. Infatti, l’equazione
di Newton, come ad esempio la (1.6), è un’equazione differenziale del secondo
ordine (derivata seconda) e, come per ogni moto, per specificare la soluzione
occorrerà assegnare la posizione iniziale, che chiameremo s0 , e la velocità
iniziale, che chiameremo v0 .
L’ equazione (1.6) ha una proprietà fondamentale che ne consente la
soluzione in forma semplice. Questa proprietà discende dal fatto che la
funzione incognita s compare sempre al primo grado ovvero l’equazione differenziale è lineare. Dunque, se s1 (t) è una soluzione anche cs1 (t), con c
costante, lo è e, inoltre, se s1 (t) e s2 (t) sono due soluzioni, è una soluzione
anche la loro somma.
Illustriamo questo secondo punto usando le proprietà delle derivate:
Se
d2 s1
k
= − s1
dt2
m
e
d2 s2
k
= − s2
dt2
m
allora:
d2 (s1 + s2 )
d2 s1 d2 s2
k
k
k
=
+ 2 = − s1 − − s2 = − (s1 + s2 )
2
2
dt
dt
dt
m
m
m
Es.4
Mostrare usando le proprietà delle derivate che se s1 ed s2 sono soluzioni della (1.6), anche
una loro combinazione lineare a coefficienti costanti s(t) = c1 s1 + c2 s2 è una soluzione.
Queste proprietà delle soluzioni della equazione differenziale definiscono
ciò che in matematica si chiama uno spazio vettoriale. Siccome abbiamo
a disposizione solo due costanti indipendenti per descrivere univocamente
la soluzione (posizione e velocità iniziali), devono esistere solo due soluzioni
indipendenti e la soluzione generica sarà della forma
s(t) = C1 s1 (t) + C2 s2 (t)
Matematicamente, questo si esprime dicendo che lo spazio vettoriale ha
dimensione 2, come i vettori nel piano.
Occorre ora trovare le due soluzioni indipendenti. Dalla (1.6) si vede che
dobbiamo cercare fra le funzioni che derivate due volte riproducono se stesse
a meno di un segno. Sono dunque le funzioni trigonometriche seno e coseno.
Proviamo quindi una soluzione della forma
s1 (t) = cos(ωt)
che, sostituita nella (1.6):
k
s1
m
e, quindi la funzione cos(ωt) è soluzione della equazione del moto se
r
k
ω=
m
−ω 2 s1 =
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
7
Es.5
Verificare che sin(ωt) è soluzione della (1.6) se ω 2 = k/m
La soluzione generale è una combinazione generica delle due soluzioni:
s(t) = C1 cos(ωt) + C2 sin(ωt)
da cui è immediato per derivazione diretta ricavare l’espressione associata
della velocità
v(t) =
ds
= −ωC1 sin(ωt) + ωC2 cos(ωt)
dt
Mediante le due costanti C1 e C2 possiamo adattare la soluzione a tutte le
condizioni iniziali x0 e v0 . Basta imporre nelle soluzioni che il tempo sia
t = 0 e quindi che il seno si annulla. Dalla prima si trova:
s0 = s(0) = C1
e dalla seconda:
v0 = v(0) = ωC2
Riscrivendo la soluzione con C1 e C2 espressi in termini delle condizioni
iniziali si trova dunque:
s(t) = s0 cos(ωt) +
v0
sin(ωt)
ω
(1.7)
Questa è la soluzione generale per il moto attorno al punto di equilibrio.
Essa ha la stessa funzione della legge oraria per il moto soggetto ad una
forza costante F : x(t) = x0 + v0 t + F/2mt2 , ed è espressa anche nello stesso
modo. Infatti contiene la posizione e la velocità iniziali ed i parametri che
descrivono la forza e l’inerzia della particella.
La (1.7) si può usare per calcolare lo spostamento dall’equilibrio al tempo
t, note lo spostamento iniziale, la velocità iniziale e i parametri della forza.
Es.6
Un particella di massa m = 100 g occupa una posizione di equilibrio individuata dalla
coordinata xE = 12.5 cm. La forza di richiamo intorno a questa posizione di equilibrio può essere
approssimata da un legge lineare con k = 30 N/m. Mediante una forza impulsiva si mette in
movimento il corpo con una velocità v0 = 1 m/s. In che posizione si trova il corpo dopo 42
secondi?
Commento alla soluzione
Consideriamo dunque la soluzione s(t) espressa dalla (1.7). Vediamo che
essa è espressa in termini di funzioni periodiche, seno e coseno, con lo stesso
periodo 2π e, quindi, ci aspettiamo che la posizione (e la velocità) riprendano
gli stessi
p valori dopo un periodo T . Questo tempo è fissato dalla costante
ω = (k/m) che, come abbiamo visto, dipende dalla rapidità di variazione
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
8
della forza vicino all’equilibrio e dalla massa del corpo mobile. Per legare le
due grandezze basta osservare che il periodo T è il tempo che corrisponde
all’incremento di 2π dell’argomento delle funzioni trigonometriche:
r
2π
m
ωT = 2π ⇒ T =
= 2π
(1.8)
ω
k
I parametri del sistema fissano dunque il periodo di oscillazione. L’inverso
del periodo, chiamato frequenza, indica il numero di oscillazioni al secondo,
ad esempio se T = 1/10 secondo, allora si hanno 10 oscillazioni al secondo,
etc. Indicheremo la frequenza con la lettera f , o altre volte con la lettera
greca ν (ni). Periodo, frequenza e pulsazione ω sono legate dalle relazioni:
f=
1
⇒ ω = 2πf
T
(1.9)
La frequenza si misura in Hz (Hertz2 .) e i multipli si indicano al solito
con kHz, MHz, GHz etc. Se necessario indicheremo le unità di misura di
ω in rad/s (come se fosse una velocità angolare) ma per evitare confusione
cercheremo di specificare sempre f oppure T .
Inoltre, la soluzione mostra che le oscillazioni si generano quando almeno
una delle due condizioni iniziali è diversa da zero3 . Quindi si può mettere in
oscillazione la massa m spostandola dalla posizione di equilibrio e lasciandola
andare da ferma (s0 6= 0; v0 = 0) oppure imprimendole una velocità, ad
esempio con una forza impulsiva quando è nella posizione di equilibrio s0 =
0; v0 6= 0) oppure in un caso generale sia spostandola che imprimendole una
velocità.
Es.7
Quanto valgono frequenza, periodo e pulsazione per il moto oggetto dell’esercizio prece-
dente?
Ampiezza e fase
È spesso molto conveniente scrivere la(1.7) in una forma diversa:
s(t) = A cos(ωt − φ)
dove A è detta ampiezza dell’oscillazione ed indica il massimo spostamento dalla posizione di equilibrio durante l’oscillazione. La fase φ esprime il
2
In onore del grande scienziato Heinrich Hertz, uno dei fondatori dell’elettromagnetismo, allievo di Helmholtz. Suo nipote Gustav fu insignito del premio Nobel per la
fisica nel 1925 per un esperimento cruciale per la moderna teoria atomica e il figlio di
Gustav, Carl é considerato l’inventore della ecografia medica, essendo riuscito all’inizio
degli anni ’50 in Svezia ad osservare usando gli ultrasuoni il movimento della valvola mitralica. Talvolta, quando si sente parlare di nepotismo baronale si ignora che l’ambiente
familiare può semplicemente avere una positiva influenza sull’educazione dei giovani.
3
Quando entrambe sono nulla si ha la soluzione banale s(t) = 0 che corrisponde al moto
di un corpo che è posto nella posizione di equilibrio (s0 = 0) con velocità nulla (v0 = 0
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
9
ritardo rispetto all’istante iniziale a cui la funzione raggiunge l’estremo dell’oscillazione. In una soluzione scritta come sopra è evidente che il coseno
ha il suo massimo per ωt − φ = 0 ovvero ad un istante che segue l’istante
iniziale della quantità t = φ/ω, come si vede nella figura.
Per trovare la relazione di A e φ con s0 e v0 basta sviluppare il coseno
con la formula di addizione4 :
s(t) = A cos φ cos ωt + A sin φ sin ωt
e, identificando questa con la (1.7) si trova:
v0
(1.10)
ω
Per ricavare A e φ separatamente in funzione di s0 e v0 è un a questione
di algebra. Ad esempio si può sommare il quadrato membro a membro delle
due equazioni, trovando:
A cos φ = s0
A sin φ =
A2 cos2 φ + A2 sin2 φ = A2 (cos2 φ + sin2 φ) = A2 = s20 +
da cui:
r
A=
s20 +
v02
ω2
4
cos(α ± β) = cos α cos β ∓ sin α sin β
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
v02
ω2
10
Per la fase basta dividere membro a membro la seconda delle (1.10) per la
prima e si trova subito:
A sin φ
v0
= tan φ =
A cos φ
ωs0
Un punto estremamente importante è evidente dalle formule precedenti: il periodo di oscillazione (e quindi la frequenza) per piccole oscillazioni
dipende solo dal sistema studiato, cioè dal rapporto k/m ma non dipende
dall’ampiezza delle oscillazioni.
5.1.3 Una applicazione delle idee precedenti: lo spettro infrarosso
Possiamo pensare di disturbare un sistema all’equilibrio provocandone un’oscillazione, che sarà di diversa ampiezza a seconda del disturbo. Tuttavia, se
misuriamo le frequenze di oscillazione otteniamo delle informazioni sul sistema, indipendentemente da quanto lo disturbiamo (sempre per oscillazioni
piccole). L’analisi delle frequenze di un sistema è uno dei metodi pi potenti
e fruttuosi per capire la struttura di sistemi complessi, le cui parti oscillano
intorno alle posizioni di equilibrio con frequenze caratteristiche. Una delle
applicazioni npiù impressionanti di questa tecnica si ha nella analisi della
meccanica molecolare ossia dello studio dei moti intramolecolari mediante
modelli di interazione di tipo newtoniano.
Ad esempio, si immagina che in una molecola i nuclei degli atomi siano
mantenuti intorno a posizioni di equilibrio che determinano la forma della
molecola stessa. Possiamo immaginare questa situazione di equilibrio come
effetto delle forze di legame con gli altri nuclei e, come avviene per il moto
di qualunque corpo in prossimità di un punto di equilibrio stabile, gli atomi
possono oscillare intorno a queste posizioni con frequenze caratteristiche
della particolare molecola. La presenza di queste frequenze in un campione
può indicare spesso senza equivoci la presenza di una particolare specie
molecolare nel campione.
Una semplice illustrazione della situazione per il gruppo metilene CH2 è
visibile alla voce Spettroscopia infrarossa di Wikipedia nella quale animazioni elementari mostrano vari modi di vibrazione. Le oscillazioni effettive
sono una combinazione di questi moti semplici (o normali).
Consideriamo il moto di uno degli atomi di idrogeno ed in particolare
consideriamo la vibrazione che avviene nella direzione del legame con il
carbonio. Chi ha svolto esercizio fisico in palestra comprende perché il moto
considerato è detto di stretching. La sua frequenza è legata all’intensità della
forza di legame vicino al punto di equilibrio. La forza di legame dipende
dall’ambiente in cui il gruppo metile si trova e le interazioni sono molto
complesse. Dobbiamo dunque per forza semplificare l’oggetto del nostro
studio ed immaginare che in prossimità della posizione di equilibrio la forza
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
11
sia funzione della distanza d tra i nuclei dell’idrogeno del carbonio e che
per piccoli spostamenti S dalla distanza di equilibrio dE , in direzione della
congiungente la forza possa essere approssimata con una forza elastica del
tipo F = −ks.
Conoscere a priori la costante di forza non è cosa semplice: generalmente
si trovano tabulate per legami specifici. Il loro valore è espresso spesso in
md/Å (millidine per Ångstrom)5 Per il gruppo CH2 si trova che il legame
C − H è descritto da una costante di forza k = 4.56md/Å. Sappiamo che la
massa dell’idrogeno è circa MH = 1.67 10−27 kg. Per convertire il valore della
k espresso in md/Å nel SI dove l’unità di misura è il N/m basta moltiplicare
per 100. Per il legame C − H vale:
4.56
md
10−3 · 10−5 N
= 4.56
= 456 N/m
10−10 m
Å
che, come si vede è un valore enorme su scala atomica e riflette la intensità
delle forze elettriche.
La frequenza di vibrazione dell’atomo di idrogeno associata a questa
forza di legame è dunque:
r
ω
1
k
f=
=
' 8.3 1013 Hz
2π
2π M
Le frequenze di vibrazione di una molecola possono essere osservate con le
tecniche della spettroscopia ossia misurando la dipendenza dalla frequenza
delle variazioni della radiazione elettromagnetica incidente su un campione
di molecole. Il risultato di questa analisi è normalmente mostrato attraverso
un grafico che indica la grandezza che varia (ad esempio la luce trasmessa
da un campione) in funzione della frequenza ν (o della lunghezza d’onda λ)
della radiazione.
Ricordiamo infine che sussiste la relazione:
λ=
c
ν
tra la lunghezza d’onda e la frequenza della luce essendo c = 3 108 m/s la
velocità della luce nel vuoto. Per la frequenza f trovata questo comporta
che la lunghezza d’onda è:
l=
c
= 3.6 10−6 m = 3.6 µm
f
La lunghezza d’onda di qualche micron appartiene alla regione del vicino infrarosso. Invece della lunghezza d’onda in spettroscopia si usa come
5
La dyne è una unità non-standard di forza e vale 1dyne = 10−5 N . L’Ångstrom è una
unità non-standard di lunghezza e vale 1 Å = 10−10 m.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
12
grandezza l’inverso della lunghezza d’onda che è detto numero d’onda e si è
soliti esprimerne il valore in cm1 .
1
1
1
m−1 =
(10−2 cm)−1 = 2770 cm−1
=
l
3.6 10−6
3.6 10−6
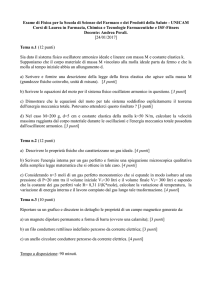
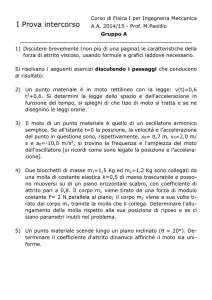
Nella figura6 è mostrato uno spettro vibrazionale del propano in cui è chiara
la banda di assorbimento tra 2500 e 3000 cm−1 corrispondente alla vibrazione di stretching nel legame C − H.
5.2 Molle ideali
Fin qui abbiamo visto che è possibile approssimare la forza agente su un
corpo vicino ad una posizione di equilibrio come una forza proporzionale
allo spostamento dall’equilibrio. Ci si può domandare se esistono in natura
oggetti materiali in cui questa approssimazione è più o meno ben verificata
e quanto si può rendere meno stringente la condizione che lo spostamento
dalla posizione di equilibrio sia piccolo.
Un approccio alternativo è di assumere che esistano sistemi nei quali
l’approssimazione è verificata sempre. In generale si tratterà di sistemi ideali,
come l’ideale corpo non soggetto a forze del primo principio della dinamica
o il corpo rigido. Il fatto che esistano nella realtà sistemi reali che sono
bene approssimati da questi oggetti ideali rende tanto più utili il modello e
le conseguenze che si possono trarre da esso.
Dunque, una molla ideale è un corpo, di massa trascurabile, il cui
allungamento s, da una lunghezza a riposo che essa ha in assenza di forze
6
Tratta dal sito del laboratorio di spettroscopia dell’università del Maine
http://www.physics.umaine.edu/FPALM SFS NOV09/sfs.html.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
13
applicate, è proporzionale alla forza applicata lungo il suo asse, secondo la
relazione, detta legge di Hooke:
F = −ks
La costante elastica k della molla ha dunque le dimensioni di una forza
diviso una lunghezza e le sue unità di misura sono i N/m. La misura del k
di una molla è, in linea di principio, semplice: si applica una forza nota, ad
esempio appendendo una massa nota alla molla posta in posizione verticale
e si misura l’allungamento della molla. Il rapporto F/x è k. Una buona
approssimazione di molle ideali sono le molle di acciaio elicoidali o certe
corde elastiche.
Es.8
Ad una molla ideale si applica una forza di 15 N e si osserva un allungamento di 12 cm.
Quanto vale la costante elastica della molla?
Ovviamente per una massa m soggetta alla sola forza di una molla
ideale vale la discussione precedente della equazione del moto, senza alcuna
condizione sulla ampiezze della oscillazione. per una molla ideale, di costante
elastica k il moto è un moto oscillatorio ed il corpo di massa
p m oscilla intorno
alla posizione di riposo della molla con periodo T = 2π m/k.
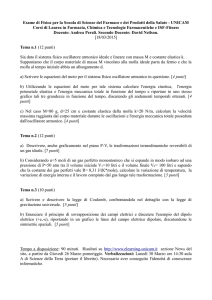
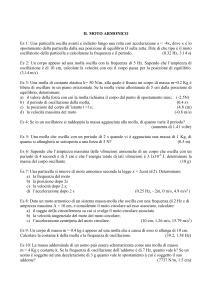
La situazione schematica in cui il moto è di questo genere ed è detto
armonico è quella di una molla ideale fissata ad un estremo e collegata ad
una massa m che può scivolare senza attrito su un piano orizzontale, come
mostrato in figura.
La legge oraria (1.7) si applica per calcolare il moto quando si conoscono
spostamento iniziale s0 e velocità iniziale v0 .
Es.9
Un corpo di massa m = 1 kg è collegato ad una molla orizzontale di costante elastica
k = 1.8 N/m, fissata all’altro estremo. Il corpo può scivolare senza attrito sul piano di appoggio.
La molla viene spostata di 12 centimetri dalla posizione di riposo e viene lasciata andare imponendo
una velocità v0 = 0.31 m/s nel verso di allontanamento dalla posizione di equilibrio. Calcolare
posizione e velocità della massa dopo un tempo di 10 secondi. A quale istante la massa passa per
la prima volta dalla posizione di riposo? In che posizione si trova quando la velocità si annulla la
prima volta? E quando si annulla la seconda volta?
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
14
Esercizio: molla verticale
In questo paragrafo consideriamo il caso immediatamente più complicato in
cui oltre alla forza elastica il corpo è soggetto ad una forza costante. La
siatuzione schematica è quella di una molla verticale fissata ad un estremo
al soffitto. Sul corpo appeso in una posizione generica, individuata dalla
coordinata x agiscono la forza peso (costante) e la forza di richiamo della
molla. Se l’origine delle coordinate è presa nella posizione di riposo della
molla (la posizione in cui la molla non è né compressa né estesa e non esercita
forze) la forza totale è:
F (x) = −kx + mg
Il segno positivo della forza peso indica che si è preso come verso positivo
quello verso il basso.
La procedura per scrivere la equazione di moto del corpo soggetto alla
forza F (x) consta di tre passaggi.
• si trova, se esiste, la posizione di equilibrio xE ponendo F (x) = 0 e
risolvendo rispetto a x
• Si calcola la costante elastica nella posizione di equilibrio calcolando
F 0 (xE ). Il punto è di equilibrio stabile se F 0 (xE ) < 0.
• Ponendo F 0 (xE ) = −k, si scrive l’equazione del moto per lo spostamento s = x − xE dalla posizione di equilibrio:
m
d2 s
= −ks
dt2
Questa ricetta è valida qualunque sia l’espressione della forza risultante
F (x) purché questa dia luogo un punto di equilibrio stabile in cui la forza si
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
15
annulla e la derivata della forza è negativa. Chiaramente per una forza generica la approssimazione di oscillazione armonica è buona solo se l’ampiezza
della oscillazione è piccola. Applichiamo ora la procedura al caso della molla
verticale.
•
−kx + mg = 0 ⇒ xE =
mg
k
•
F 0 (x) = −k ⇒ F 0 (xE ) = −k < 0
La costante elastica è la stessa anche per la molla verticale
• Ponendo s = x − xE , lo spostamento dalla posizione di equilibrio
soddisfa la equazione
d2 s
k
=− s
2
dt
m
Quindi la posizione di equilibrio della molla verticale è spostata verso il basso
della quantità mg/k rispetto alla lunghezza a riposo della molla (origine delle
coordinate x). La legge oraria per lo spostamento è dunque:
s(t) = s0 cos(ωt) +
v0
sin(ωt)
ω
e la pulsazione ω è la stessa della molla orizzontale. Ricordando che la
relazione tra s ed x è:
s(t) = x(t) − xE = x(t) − mg/k
si può esprimere la legge oraria per x:
x(t) = s(t) +
mg
mg
v0
=
+ s0 cos(ωt) +
sin(ωt)
k
k
ω
Nauralmente anche le condizioni iniziali s0 e v0 possono essere espresse nella
coordinata x anziché con s Per la prima vale la stessa relazione
s0 = x0 − mg/k
mentre le velocità sono le stesse perché le due grandezze s(t) e x(t) differiscono per una costante e quindi hanno la stessa derivata temporale. Assumiamo, ad esempio che la massa parta dalla posizione di riposo della
molla x0 = 0 e con velocità nulla. In pratica sosteniamo il corpo nella posizione di riposo della molla e poi lo lasciamo andare senza spingerlo. Allora
l’equazione oraria per la x (basta sostituire x0 = 0 e v0 = 0) è:
x(t) =
mg
(1 − cos(ωt))
k
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
(2.11)
16
Si vede che la massima ascissa raggiunta è dopo mezzo periodo quando il
coseno diventa -1 e vale xmax = 2mg/k. La ascissa minima si ha dopo un
periodo quando il coseno è massimo e vale +1 e vale xmin = 0 ed è uguale
al valore di partenza. Il punto centrale della oscillazione si ha nel mezzo
tra i due estremi per x = mg/k che è appunto la posizione di equilibrio.
La soluzione trovata riproduce fedelmente le caratteristiche del moto che
avevamo previsto analizzando il problema dinamico.
Es.10
Considerando che il sistema descritto sopra parta da fermo dalla posizione di riposo della
molla e la sua legge oraria sia la 1.11 calcolare l’espressione analitica della velocità quando il corpo
passa per il punto di equilibrio.
5.2.1 Molle in serie ed in parallelo
Conviene pensare alle molle ideali come elementi di oggetti più complessi,
cosı̀ come resistenze, condensatori etc. possono far parte di circuiti più
complicati. Supponiamo di avere una scatola chiusa da cui fuoriesce un
gancio, e di verificare che applicando una forza F si ottiene uno spostamento
s del gancio proporzionale alla forza applicata. In questo caso siamo portati
ad associare al sistema il modello di molla ideale con una costante elastica
l tale che F = −ks. Se apriamo il sistema (la scatola) e scopriamo che
internamente è costituito da molle, la domanda a cui vogliamo rispondere
è: che relazione c’è fra le costanti delle molle del sistema e la costante k che
abbiamo misurato?
Il lettore è invitato a riflettere sul fatto che questo è un esempio della procedura (bottom-up) di cui abbiamo parlato nel capitolo dedicato alle
forze elementari secondo la quale si cerca di ricavare comportamenti macroscopici (la costante k di tutto il corpo) da caratteristiche microscopiche
(le costanti delle molle che costituiscono il corpo).
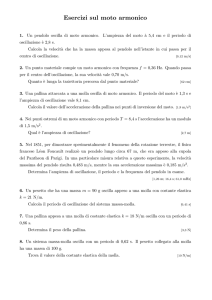
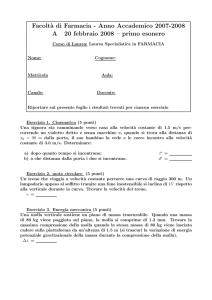
È sufficiente considerare il caso di due sole molle, il caso generale si
ottiene poi facilmente. Ci sono due modi di disporre fra loro due molle,
illustrati nella figura: a sinistra due molle in parallelo (con i due estremi in
comune) e a destra due molle in serie (una dopo l’altra).
Consideriamo il primo caso. Il sistema di due molle in parallelo si allunga
di una quantità s e ciascuna molla si allunga di quella quantità. La forza
esterna F che produce questo allungamento uguaglia la somma delle due
forze. In modulo:
F = k1 s + k2 s = (k1 + k2 )s
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
17
La forza esercitata dal sistema delle due molle è, per il terzo principio uguale
ed opposta a questa:
Fm = −(k1 + k2 )s
e le due molle in parallelo sono equivalenti, dal punto di vista della forza vista
dall’esterno ad una sola molla con costante pari alla somma delle costanti.
Se ho più molle il ragionamento segue ugualmente e la costante di un insieme
di molle in parallelo è uguale alla somma delle costanti di tutte le molle. In
particolare se si hanno n molle uguali in parallelo e ciascuna ha costante k
la costante del sistema è:
kT = nk
Il secondo caso richiede qualche passaggio elementare: se applichiamo
all’estremità libera una forza F , in condizioni di equilibrio la molla ad essa
in contatto si deve allungare di una quantità s1 tale che la forza da essa
esercitata equlibri F . Da questa condizione ricaviamo che:
s1 =
F
k1
La molla 1 la esercita sull’altra estremità la stessa forza (proprietà delle
molle ideali) e per assicurare l’equilibrio anche di questo punto di contatto
tra le due molle occorre che l’allungamento s2 della molla 2 dia una forza
uguale a quella della prima molla e cioè a F :
s2 =
F
k2
Ora, l’allungamento totale del sistema è la somma degli allungamenti delle
singole molle:
F
1
1
F
s = s1 + s2 =
+
= F( + )
k1 k2
k1 k2
In conclusione l’inverso della costante globale del sistema è uguale alla somma
degli inversi delle costanti delle singole molle:
1
1
1
=
+
k
k1 k2
Allora per n molle uguali in serie si ha:
1
n
k
= ⇒ kT =
kT
k
n
Queste osservazioni ci permettono nel prossimo paragrafo di connettere il
modulo di Young alle costanti elastiche che modellizzano l’interazione tra le
molecole di un solido cristallino.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
18
Modulo di Young: punto di vista microscopico
Ricordiamo in breve come abbiamo definito il modulo di Young per una
sbarra omogenea di sezione A e di lunghezza L ad una estremità della quale
è applicata una forza F nella direzione della lunghezza. Per una vasta categoria di materiali e per intervalli opportuni di forza applicata l’allungamento
s del materiale è proporzionale alla forza e sussiste la seguente relazione:
F
s
=E
A
L
Scritta in termini di una costante elastica k la relazione precedente permette di mettere in relazione quest’ultima con una proprietà intrinseca del
materiale, il modulo di Young E e la forma della sbarra (sezione e lunghezza):
A
A
s = ks ⇒ k = E
(2.12)
L
L
Per giustificare la dipendenza di k dalla geometria della sbarra immaginiamo che la costante elastica globale sia il risultato della struttura del
materiale che possiamo immaginare, per semplicità, formato da un reticolo
di atomi identici collegati tra loro da forze microscopiche assimilabili a molle
e formato da strati paralleli, ciascuno formato da un reticolo di atomi accoppiati nella direzione dell’allungamento da molle di costante elastica atomica
ka e a distanza a l’uno dall’altro. In ogni strato ci sono un numero ns di
molle pari all’area totale A dello strato diviso per l’area a2 , a disposizione
di una molla:
A
na = 2
a
e, essendo tutti gli oscillatori in parallelo, la costante effettiva ks di uno
strato è:
A
ks = na ka = ka 2
a
ossia è proporzionale ad A. Inoltre, in una sbarra di lunghezza L ci sono ns
piani reticolari distanti d ossia:
F =E
L
d
e dal punto di vista elastico sono collegati in serie. Quindi la costante
elastica dell’insieme dei piani, ovvero della sbarra è data dalla formula per
le molle in serie:
ks
d A
k=
= ka 2
ns
a L
dove si ritrova la dipendenza della (1.12) dai parametri geometrici e si può
mettere in relazione la proprietà macroscopica, il coefficiente di Young, con
i parametri microscopici, forza di legame e distanze interatomiche:
ns =
E = ka
d
a2
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
19
Esercizio svolto: orologi al quarzo
I moderni7 orologi sono basati sulla oscillazione meccanica di piccoli cristalli di quarzo opportunamente sagomati. Consideriamo, per semplicità, un
cristallo come un parallelepipedo di sezione di base A = 4 mm2 e spessore L = 1 mm. La densità del quarzo è ρ ∼ 2.5 g/cm3 e il modulo di
Young E ∼ 100 GP a. Stimare la frequenza delle oscillazioni nella direzione
perpendicolare alle basi.
Anche in questo esercizio siamo di fronte al problema di schematizzare il
sistema eliminando i dettagli trascurabili, almeno in prima approssimazione,
e cogliendo le similitudini con sistemi più semplici di cui conosciamo già il
comportamento. Qui possiamo assimilare il cristallo ad una sbarra omogenea
in regime elastico. Come abbiamo visto sopra, la deformazione s della sbarra
è simile a quella di una molla ideale con costante elastica:
k=E
A
L
La frequenza di oscillazione della molla dipende dalla massa M ad essa
collegata. Qui si potrebbe prendere come massa quella della cristallo, almeno
come ordine di grandezza anche se l’approssimazione non tiene conto del
fatto che, in realtà la massa è distribuita all’interno della molla stessa. Dato
che vogliamo solo avere un idea delle frequenze in gioco possiamo fare il
calcolo in queste condizioni poco realistiche.
A
E
k
E
ω =
= L =
M
ρAL
ρL2
2
ossia:
ω
1
ν=
=
2π
2πL
s
E
ρ
con i valori dell’esercizio:
1
ν=
2π · 10−3 m
s
1011 P a
= 1.0 106 Hz
2500 kg/m3
che coglie l’ordine di grandezza degli oscillatori a cristallo più comuni. In
realtà i cristalli commerciali vengono sagomati in forma di forcella (simile ad un diapason) ed il calcolo della frequenza in funzione dei parametri
costruttivi è molto piú complessa.
7
I primi brevetti concernenti orologi (oscillatori) basati su cristalli di quarzo risalgono
alla seconda decade del secolo scorso.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
20
5.3 Energia potenziale
Prima di aggiungere dettagli, come fatto in altri casi, al modello di oscillatore
torniamo sul teorema delle forze vive, cui si è fatto cenno nella lezione
4:
La variazione di energia cinetica di un sistema è uguale
al lavoro delle forze agenti sul sistema
Per ciascuna forza F~ che agisce sul sistema che si muove dallo stato iniziale
i allo stato finale f la competente variazione8 di energia cinetica
Z
Ec(f ) − Ec(i) = Li→f ;
Li→f =
f
F~ · d~s
(3.13)
i
Precisiamo meglio il significato dell’integrale all’ultimo membro che definisce
il lavoro della forza F che abbiamo già commentato brevemente quando
abbiamo introdotto la nozione di lavoro.
Dunque, il corpo, per semplicità un punto materiale, soggetto alla forza
F~ si muove dalla posizione iniziale i alla posizione finale f lungo una curva,
la cosiddetta traiettoria. La curva può essere suddivisa in elementi molto
piccoli, in tutto approssimabili ad segmenti rettilinei rappresentati da vettori d~sj . Se la forza F~ non cambia in modo irregolare, quando lo spostamento elementare d~sj è molto piccolo la forza si può considerare in quel
tratto costante e di valore F~j . Il lavoro compiuto in quel tratto è dunque
semplicemente il prodotto scalare:
dLj = F~j · d~sj
esso può essere volta a volta positivo, negativo o nullo a seconda che la
forza faccia un angolo acuto, ottuso o retto con lo spostamento infinitesimo.
In figura è mostrato un tratto di curva approssimato da quattro segmenti
rettilinei. In ciascuno di questi è indicato il vettore forza all’inizio del tratto.
Se la forza non cambia troppo rapidamente questo vettore rappresenta la
forza costante su tutto lo spostamento elementare. Se l’approssimazione
non è soddisfacente si può infittire la suddivisione della curva in tratti più
piccoli.
8
Per variazione intendiamo, al solito, la differenza tra il valore alla fine ed il valore
all’inizio.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
21
L’integrale è semplicemente il valore a cui tende la somma di tutti i
contributi dLi quando il numero di contributi diventa grandissimo:
Li→f =
NX
→∞
j=1
dLj =
NX
→∞
j=1
F~j · d~sj =
Z
f
F~ · d~s
i
Il teorema dell’energia cinetica è sempre vero, cioè vale per qualunque
tipo di forza, ma in casi complicati può essere poco pratico da utilizzare: per
calcolare il lavoro a secondo membro occorre seguire la traiettoria del corpo, e per avere questa conoscenza occorre in generale risolvere le equazioni
del moto. D’altronde, se conosciamo la soluzione esatta delle equazioni del
moto l’uso della (2.13) è abbastanza inutile. La relazione (2.13) è invece veramente utile quando possiamo calcolare il lavoro senza risolvere le equazioni
del moto. Questo è quanto abbiamo fatto nei semplici casi in cui abbiamo
applicato la (2.13), ad esempio quando il moto è unidimensionale (la traiettoria è fissata dai vincoli) e le forze sono costanti o dipendono solo dalla
posizione x lungo la traiettoria unidimensionale (curva).
Forze conservative
Un caso particolarmente interessante in cui possiamo calcolare il lavoro senza
risolvere le equazioni del moto, è quando il lavoro di una forza non dipende
dal particolare cammino che il corpo effettivamente percorre nello spostamento i → f , ma solo dai punti iniziali e finali. In questo caso possiamo
scegliere un cammino qualunque che collega inizio e fine e non dobbiamo
conoscere la traiettoria reale. Che questo accada o meno dipende dalla
natura delle forze in gioco: quelle per cui vale questa affermazione si dicono forze conservative. La conoscenza di cui abbiamo bisogno non è il
particolare moto che ha fatto il corpo soggetto ad un campo di forze conservative, ma le proprietà del campo di forza (direzione verso e modulo
della forza in ogni punto dello spazio). Ad esempio, nel caso del campo di
gravità vicino alla terra non interessa ai fini del calcolo del lavoro della forza
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
22
di gravità conoscere la particolare traiettoria che ha percorso il corpo, ma
solo la posizione iniziale e finale.
Questa indipendenza del lavoro dal cammino rende possibile, come spiegamo qui sotto, scrivere il
Z f
Li→f =
F~ · d~s = U (i) − U (f )
(3.14)
i
dove U (P ) è una funzione scalare del punto, ossia un campo scalare, detta energia potenziale. La procedura di calcolo dell’energia potenziale è
grosso modo riassumibile in due passi:
• Si fissa un punto O come punto di riferimento, origine, dell’energia potenziale e si assegna a quel punto una energia arbitraria U0 ,
usualmente posta uguale a zero.
• Si calcola il lavoro della forza in questione da un punto generico P al
punto O, seguendo un percorso qualunque (il più semplice dal punto di
vista del calcolo. Definiamo il lavoro calcolato come la differenza tra
l’energia potenziale nel punto P e l’energia del riferimento. Se quest’ultima è nulla il lavoro coincide semplicemente con l’energia potenziale
U (P ).
Abbiamo quindi calcolato l’energia potenziale di ogni punto rispetto al
riferimento. Se dobbiamo calcolare il lavoro di una forza conservativa che
agisce su un corpo che si muove tra due punti P e Q basta considerare il cammino da P a Q passante per il riferimento O. Per l’additività
dell’integrale:
LP →Q = LP →O + LO→Q = LP →O − LQ→O = U (P ) − U (O)
dove si è fatto uso anche della proprietà dell’integrale per cui se inverto gli
estremi di integrazione l’integrale cambia segno. Una caratteristica delle
forze conservative che discende da questa osservazione è che se considero il
lavotro di una forza conservativa lungo un percorso chiuso, ovvero lungo
un cammino che parte da un punto A e vi ritorna, il lavoro deve essere nullo.
In effetti, il cammino andata e ritorno può essere visto come il risultato di
due cammini da A ad un punto B appartenente al circuito. Il lavoro per
andare da A a B è lo stesso perché la forza è conservativa. Il lavoro sul
circuito può essere visto come la somma dei lavori per andare da A a B e
per tornare da B ad A. Per un dato cammino quest’ultimo è l’opposto del
lavoro per andare da A a B sullo stesso cammino per cui la somma dei due
lavori è nulla.
Il punto chiave è che, data una forza conservativa , basta calcolarsi una
sola volta la forma di U (P ), conosciuta tale funzione possiamo usarla in
qualunque moto e situazione fisica. Notiamo che se è possibile scegliere un
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
23
cammino che in ogni punto è parallelo ad F l’integrando è positivo, quindi
l’energia decresce. Questo si può esprimere dicendo che le linee di forza (che
sono i cammini tangenti in ogni punto al campo di forza) vanno dalla zona
di alta energia potenziale alla zona di bassa energia potenziale.
In natura tutte le forze “vere”, e dipendenti solo dalla posizione, sono
conservative. Non tutte le forze che si introducono nei modelli lo sono,
questo perché costruendo un modello si perdono delle informazioni sul lavoro
di alcune forze microscopiche. Un esempio tipico di questa situazione sono
gli attriti (forze non conservative). In effetti, se osserviamo che l’attrito
agisce in direzione opposta allo spostamento esso compie un lavoro sempre
negativo per cui non può rispettare la proprietà che su un percorso chiuso
il lavoro è nullo. Se consideriamo ad esempio una forza di attrito costante
in modulo, ma punto per punto opposta allo spostamento è ovvio che il
lavoro della forza d’attrito per andare da i → f dipende dalla lunghezza
della strada percorsa, oltre che dai punti di partenza e di arrivo.
Es.11
Dimostrare facendo un disegno e un ragionamento logico che l’ affermazione che nel testo
precede questo esercizio è vera.
5.4 Conservazione dell’energia meccanica
Supponiamo, per semplicità, che il sistema in esame sia soggetto ad una
sola forza e che questa sia conservativa e combiniamo il teorema dell’energia
cinetica e la definizione di energia potenziale. Sostituendo la (2.14) nella
(2.13) si ha:
Ec (f ) − Ec(i) = U (i) − U (f )
ossia portando allo stesso membro le quantità iniziali e quelle finali:
Ec (f ) + U (f ) = Ec (i) + U (i)
(4.15)
vale a dire la quantità Energia cinetica + Energia potenziale è conservata (da cui l’aggettivo per le forze). Tale somma viene chiamata energia
totale meccanica, del corpo, o semplicemente energia in questo contesto.
La (3.15) esprime il concetto, che va al di là dell’ambito della Meccanica
essendo un principio di validità universale della Fisica, di conservazione
dell’energia.
Notiamo esplicitamente che ogni forza conservativa ha la sua energia
potenziale, quindi se nel moto agiscono contemporaneamente più forze conservative l’energia potenziale totale è la somma delle energie potenziali delle
varie forze. Vedremo più avanti alcuni esempi espliciti.
Infine se nel moto agiscono sia forze conservative f~c che attriti f~a la
forza è la somma dei due contributi F~ = f~c + f~a e il lavoro, per la linearità
dell’integrale è il lavoro delle forze conservative, scrivibile come differenza
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
24
della energia potenziale, più il lavoro delle forze di attrito (dissipative):
L = U (i) − U (f ) + Lattrito
e, sostituendo questa nel teorema delle forze vive si trova:
Ec (f ) + U (f ) − (Ec (i) + U (i)) = Lattrito
ovvero la differenza tra l’energia meccanica finale e quella iniziale è uguale al
lavoro (negativo) delle forze d’attrito. In presenza di queste l’energia tende
a diminuire, viene dissipata dall’attrito.
5.4.1 Esempi di energia potenziale
Si può dimostrare che le proprietà (2.14), (3.15) valgono in particolare per le
forze radiali, come la forza gravitazionale di Newton ed elettrica di Coulomb,
per le forze costanti (come la gravità in prossimità della superficie terrestre),
le forze dovute a campi elettrici statici, le forze elastiche. Consideriamo qui
di seguito il calcolo dell’energia potenziale quando agiscono alcune di queste
forze.
Gravità costante: energia potenziale del peso
Vicino alla superficie terrestre la forza di gravità che agisce su un corpo
di massa m è costante e diretta verticalmente verso il basso. Il lavoro di
una forza costante è calcolabile semplicemente come il prodotto scalare della forza per lo spostamento totale. La prima osservazione che si può fare
è che i punti che si trovano alla stessa quota rispetto alla superficie terrestre hanno la stessa energia potenziale. Infatti, se prendiamo due punti
appartenenti ad un piano ortogonale alla gravità qualunque cammino ha
come risultante uno spostamento ortogonale alla forza e, quindi la differenza di energia potenziale tra i due punti è nulla. Questo modo di guardare
al campo dell’energia potenziale è molto utile. Data una certa regione dello spazio e l’energia potenziale in quella regione i punti che hanno eguale
energia potenziale appartengono a superfici equipotenziali. In assenza
di forze dissipative il moto lungo superfici equipotenziali avviene ad energia
cinetica (ossia a velocità) costante. Per il campo di gravità vicino alla terra
le superfici equipotenziali sono piani paralleli alla superficie terrestre. Passando da superfici equipotenziali di energia maggiore a superfici a energia
minore la energia cinetica aumenta.
Applichiamo ora la procedura di calcolo in due passi che abbiamo enunciato sopra. Si prende un punto di riferimento O, ad esempio sulla superficie
terrestre, e si considera un generico punto P sulla verticale da O e ad una
altezza generica h. La energia potenziale di U (P ) è il lavoro per andare da
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
25
P ad O. Prendendo il cammino verticale P → O si ha che la forza è costante
e nello stesso verso dello spostamento per cui:
U (P ) − U (0) = mgh
Fissando come nullo il valore dell’energia potenziale al suolo e considerando
la generica quota z di un punto9 dal suolo si ha l’espressione per l’energia
potenziale della gravità terrestre:
U (z) = mgz
La differenza di energia potenziale tra un punto a quota z1 ed un punto a
quota z2 è semplicemente:
U1 − U2 = mg(z1 − z2 )
Notiamo che, in accordo con quanto detto sopra in generale, la forza di
gravità tende a portare i corpi dai punti ad alta energia potenziale (più
lontani dalla superficie terrestre) verso quelli a bassa energia potenziale (con
una distanza z dalla superficie terrestre minore).
Campo elettrico costante: potenziale elettrico
~ che
Un caso del tutto analogo è quello di un campo elettrico uniforme E
~ Le superfici equipotenziali sono, per
esercita su una carica q la forza F~ = q E.
la stessa ragione argomentata per la gravità costante, i piani ortogonali alla
direzione (costante) del campo elettrico. Prendiamo allora come direzione
di calcolo la direzione del campo elettrico e consideriamo due punti che
~ hanno coordinate xi e xf . Lo spostamento
su un asse x orientato come E
orientato è la differenza tra le coordinate del punto finale e del punto iniziale
ed il lavoro della forza costante, ossia la differenza di energia potenziale:
Li→f = U (i) − U (f ) = qE(xf − xi )
È usuale fare la seguente semplificazione: poiché la forza è proporzionale alla
carica, anche il lavoro lo sarà. Conviene allora definire l’energia potenziale
per q = 1 (ovvero dividendo la forza per q). Si definisce cosı̀ il potenziale
elettrostatico ( o meglio la differenza di potenziale):
Z f
~ · d~s = E(xf − xi )
V (i) − V (f ) =
E
i
Prendiamo ora uno dei piani equipotenziali come piano di riferimento e assegnamogli il potenziale V0 e la coordinata xi = 0. La equazione precedente
9
Non importa che il punto sia sulla verticale di O, giacché ogni punto alla quota z ha,
per l’osservazione fatta all’inizio del paragrafo, la stessa energia potenziale di quello che
si trova sulla verticale.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
26
ci dice un punto appartenente ad un piano equipotenziale di coordinata x
ha il potenziale elettrico:
V (x) = V0 − Ex
Si noti il segno differente rispetto alla gravità, qui avevamo preso l’asse x nel
verso del campo elettrico, mentre nel caso gravitazionale l’asse z era stato
preso opposto alla direzione della forza.Nel linguaggio corrente si dice che
se ci si sposta di una distanza d nella direzione del campo elettrico si risente
di una caduta di potenziale elettrico:
δV = V (0) − V (d) = Ed
Al solito il campo elettrico va dalle zone ad alto potenziale a quelle a basso
potenziale, si faccia attenzione per che le cariche possono essere di entrambi
i segni, quindi le forze sulle cariche positive seguono le linee di campo elettrico, quelle sulle cariche negative le seguono al contrario. Quindi le cariche
negative, ad esempio gli elettroni in un conduttore metallico, si spostano
verso la zona a potenziale più alto.
Energia potenziale elastica
Per illustrare il calcolo della energia potenziale elastica esaminiamo un sistema particolare: una molla ideale di costante elastica k che è in posizione
di riposo vincolata ad un suo estremo e disposta lungo l’asse x. Un corpo
di massa m con velocità vo viene lanciato contro la molla ed entrambi i corpi, la massa e la molla, sono vincolati a muoversi senza attrito sull’asse x.
Ci proponiamo di calcolare quale tratto percorre il corpo prima di fermarsi
dopo avere incontrato l’estremo libero della molla.
La situazione è illustrata in figura. Scegliamo di descrivere la posizione
dei corpi con un asse orizzontale diretto verso la molla e con l’origine nella
posizione iniziale, di riposo, della molla stessa. Sulla massa in movimento
fino a che non entra in contatto con la molla non agisce nella direzione x
alcuna forza, nelle ipotesi del problema (nella direzione verticale agiscono
il peso e la forza di vincolo del piano che si equilibrano). Quando il corpo
tocca la molla e questa inizia a comprimersi, alle forze precedenti si aggiunge
la forza della molla che, se chiamiamo x lo spostamento dalla posizione di
riposo (x(0) = 0) vale:
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
27
F = −kx
ed è anche, sempre nelle ipotesi del problema, la risultante delle forze. Essa
si oppone al moto decelerando m. Per trovare il punto in cui la massa si
ferma per un istante si potrebbero risolvere le equazioni del moto con le
condizioni iniziali x(0) = 0 e v(0) = v0 . Come sappiamo dalla (1.7) la
soluzione del moto è data da:
r
v0
m
x(t) =
sin ω t = v0
sin ω t
ω
k
Al momento in cui il corpo si ferma (ed inizia, sotto l’effetto della forza della
molla compressa, a ritornare indietro) lo spostamento dall’origine è massimo
e dunque il seno vale 1. Quindi la distanza D percorsa è:
r
m
D = v0
k
La situazione si potrebbe anche vedere da un altro punto di vista: il
corpo si ferma quando la velocità diventa nulla. La variazione di energia
cinetica ∆Ec (energia cinetica finale meno energia cinetica iniziale) deve
essere dunque:
1
1
Ec (f ) − Ec (i) = 0 − mv02 = − mv02
2
2
Per il teorema dell’energia cinetica la variazione è uguale al lavoro L fatto
dalla risultante delle forze, ossia, nel nostro caso dalla forza F = −kx.
Ricordiamo che il lavoro di una forza costante ~s su un corpo che fa
uno spostamento ~s vale:
L = F~ · ~s
dove l’operatore · indica il prodotto scalare definito come il prodotto dei
moduli dei due vettori per il coseno dell’angolo compreso. Nel problema che
stiamo risolvendo la forza non è costante perché, man mano che la molla si
comprime, la forza esercitata dalla molla varia, aumentando. In questo caso
dobbiamo suddividere lo spostamento totale in spostamenti elementari
infinitesimi dx e considerare per ciascuno di questi la forza costante ed
uguale al valore che ha all’estremo inferiore dello spostamento. Per essere
più precisi, a costo di apparire pedanti, consideriamo lo spostamento dal
punto individuato dalla coordinata x a quello individuato dalla coordinata
x + dx. La lunghezza dello spostamento è dx e prendiamo come modulo
della forza durante lo spostamento il valore iniziale kx. I due vettori, forza
e spostamento, hanno verso opposto per cui l’angolo tra di essi è piatto ed
il coseno vale −1. In conclusione il lavoro fatto in questo tratto vale:
dL = −kxdx
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
28
Il lavoro totale fatto dalla molla sul corpo nell’andare da x = 0 a x = L
è la somma dei singoli elementi di lavoro dL. Come sappiamo, per dx
infinitesimo questa somma è composta da infiniti termini e prende il nome
di integrale e si indica con la scrittura simbolica:
Z L
−kxdx
(4.16)
L=
0
Rb
Geometricamente il valore dell’integrale a f (x)dx corrisponde all’area che
si trova tra il grafico della funzione f (x) e l’asse delle x (vedi figura) con
l’avvertenza che se il grafico è nel semipiano di ordinata negativa l’area si
conta negativa.
In effetti il prodotto f (x)dx è l’area del rettangolino che ha per altezza il
valore della funzione nel punto x e per base l’ampiezza dell’intervallino dx
in cui abbiamo suddiviso
Il valore dell’integrale si calcola semplicemente facendo la differenza tra
il valore di F (x) la cui derivata è la funzione10 f (x), detta integranda, nei
due estremi di integrazione:
I = F (b) − F (a)
10
Si dice anche che F (x) è una funzione primitiva di f (x)
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
29
La formula precedente si chiama formula fondamentale del calcolo integrale e, per una volta, un nome altisonante corrisponde alla grande utilità
e semplicità dell’oggetto a cui si riferisce.
Nel nostro caso una funzione la cui derivata sia −kx è, come lo studente
può verificare eseguendo la derivazione, F (x) = −1/2kx2 . Il lavoro della
(3.16) quando il corpo si sposta dalla posizione di equilibrio x = 0 alla
generica posizione x = sè dunque:
1
L = − ks2
2
Se prendiamo ora la posizione di equilibrio come punto di riferimento
dell’energia potenziale della molla l’integrale precedente è, per definizione la
differenza dell’energia potenziale tra l’origine ed il punto generico:
1
− ks2 = U0 − U (s)
2
Fissando a zero l’energia di riferimento (U0 = 0) si trova infine l’energia
potenziale elastica di una molla spostata del tratto s dalla posizione di
equilibrio:
1
U (s) = ks2
(4.17)
2
Applichiamo ora la conservazione dell’energia al moto della molla da cui
siamo partiti. Inizialmente il sistema massa+molla occupa la posizione di
riposo della molla e la massa si muove con velocità v0 . Quindi l’energia
cinetica e potenziale iniziale sono:
1
Ec (i) = mv02
2
U (i) = 0
Il secondo istante che ci interessa è quello in cui il sistema si ferma, dopo
avere percorso un tratto D dalla posizione iniziale. Qui l’energia cinetica è
nulla e l’energia potenziale è data dalla (3.17) con s = D:
Ec (f ) = 0
1
U (f ) = kD2
2
Uguagliando la somma delle due energie all’inizio Ec (i) + U (i) ed alla fine
Ec (f ) + U (f )(teorema di conservazione dell’energia per la forza elastica) si
trova l’equaglianza:
1
1
mv02 = kD2
2
2
che si può risolvere rispetto a D:
r
m
D = v0
k
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
30
lo stesso risultato ottenuto con la legge del moto.
Facciamo ancora un commento: per effetto della forza frenante l’energia
cinetica della massa in moto è diminuita fino ad annullarsi. Il principio
generale della fisica secondo cui in un dato sistema l’energia si conserva
induce a pensare che la perdita di energia cinetica è stata compensata dall’aumento di altre forme di energia. L’energia cinetica si è dunque trasformata. L’unico altro oggetto che ha subito una modificazione durante il moto
di frenamento è la molla che all’inizio era distesa e alla fine è compressa di
una quantità D. Siamo dunque indotti a pensare che l’energia cinetica del
corpo si è trasferita alla molla che ora ha incrementato la sua l’energia
elastica.
Es.12
Per calcolare l’integrale (3.16) si usi il metodo grafico. Si tracci il grafico della funzione
integranda f (x) = −kx nell’intervallo [0, L] e si calcoli l’area compresa tra il grafico e l’asse x con
la regola sul segno dell’area espressa in figura. Si confronti il risultato con quello ottenuto con la
formula del calcolo integrale.
Energia potenziale gravitazionale
La forza gravitazionale universale è una forza conservativa. Consideriamo il
caso del campo di forze generato da una massa puntiforme M (o, lo stesso, al
di fuori di una massa M distribuita con simmetria sferica). La situazione è
quindi quella che si applica allo spazio intorno ad un pianeta come la Terra.
Il campo di forza è radiale e su una massa m a distanza x dal centro di
simmetria O, agisce una forza attrattiva diretta verso O e di modulo:
mM
x2
Questo ci permette di osservare che in tutti i punti che si trovano su una
sfera con il centro in O la massa m ha la stessa energia potenziale.
F =G
Infatti questi punti sono connessi da un cammino, un arco di circonferenza, che è punto per punto ortogonale alla forza e, quindi il lavoro della forza
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
31
gravitazionale è nullo e cosı́ la differenza di energia potenziale. È il caso dei
punti P e Q indicati in figura.
Per calcolare l’energia potenziale del punto P possiamo applicare la procedura generale vista sopra. Si prende un punto di riferimento R lungo la
direzione radiale cui appartiene P e più lontano di P e si calcola il lavoro
per andare da P a R. Il cammino è radiale e verso l’esterno mentre la forza
è radiale verso l’interno, per cui ogni elemento di lavoro è negativo. Detti
xP e xR le distanze dal centro dei due punti la somam di tutti gli elementi
di lavoro è l’integrale:
Z xR
Z xR
mM
1
−G 2 dx = GmM
− 2 dx
x
x
xP
xP
La primitiva di −1/x2 è 1/x per cui il valore dell’integrale è:
GM m(
1
1
−
xR xP
che è per definizione uguale alla differenza di energia potenziale U (P )−U (R).
Convenzionalemente si è soliti prendere come punto di riferimento R un
punto all’infinito (xR → ∞) e fissare la sua energia potenziale a 0. In
questo modo l’energia potenziale di ogni punto, a distanza r dal centro del
campo radiale risulta:
GM m
U (P ) = −
r
Ad esempio, in un punto sulla superficie terrestre la massa m ha una energia
potenziale:
GMT m
U =−
RT
Es.13
Applicando la conservazione dell’energia meccanica si trovi l’espressione della velocità
vf , detta di fuga che un proiettile deve avere sulla superficie terrestre per sfuggire al campo di
attrazione gravitazionale. Si assuma che conti solo la forza di gravità terrestre e che la condizione
di fuga sia di arrivare a grandissima distanza con velocità circa nulla.
Per il principio di sovrapposizione la forza di iù masse puntiformi è la
somm a delle forze e, di cionseguenza, l’energia potenziale è la somma delle
energie potenziali dovute alle singole masse. Se P è un punto che si trova
alla distanza r1 dalla massa M1 ed r2 dalla massa M2 la energia potenziale
gravitazionale di una particeklla di massa m che si trova in P è:
U (P ) = −
GM1 m GM2 m
−
r1
r2
Come si vede ogni massa esercita una forza attrattiva e tende ad abbassare
l’energia potenziale. Se voglio lanciare un proiettile dal punto P verso l’infinito devo imprimere una velocità che renda l’energia totale almeno uguale
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
32
alla energia minima che può evere all’infinito che è l’energia nulla, essendo
nulla l’energia potenziale gravitazionale e essendo l’energia cinetica minima
anch’essa zero. In formule:
1
GM1 m GM2 m
−
≥0
mv 2 −
2 0
r1
r2
e si vede che ogni massa tende a fare crescere la velocità necessaria a sfuggire
verso l’infinito. Se ad agire sul corpo è solo la terra ed il corpo parte dalla
sua superficie la energia potenziale è:
U =−
GMT m
RT
e la velocità necessaria a lanciare un razzo verso l’infinito si trova risolvendo
il seguente esercizio.
Es.14
Applicando la conservazione dell’energia meccanica si trovi l’espressione della velocità
vf , detta di fuga che un proiettile deve avere sulla superficie terrestre per sfuggire al campo di
attrazione gravitazionale. Si assuma che conti solo la forza di gravità terrestre e che la condizione
di fuga sia di arrivare a grandissima distanza con velocità circa nulla.
Energia potenziale: considerazione finale
Per concludere questa parte in cui abbiamo definito l’energia potenziale
cerchiamo di chiarirne il significato con un esperimento concettuale. Le considerazioni seguenti ci serviranno in modo particolare quando studieremo
i principi della Termodinamica, nei quali torneranno in forma generale le
nozioni di energia e lavoro.
Rimaniamo comunque per ora nell’ambito della meccanica e consideriamo un sistema, il cui stato (posizione) è descritto dalla coordinata x e su
quale agisce una forza F (x), con la corrispondente energia potenziale U (x).
È importante, dal punto di vista metodologico, capire che si può considerare l’energia potenziale come una sorta di “immagazzinamento” di un lavoro
fatto dall’esterno sul sistema.
Per illustrare questo punto di vista, consideriamo infatti il sistema inizialmente fermo in un punto di coordinata xi . Se il sistema fosse isolato
evolverebbe (si muoverebbe) sotto l’azione della forza F . Supponiamo ora di
voler portare il sistema al punto xf in modo “infinitamente lento” (cioè con
velocità praticamente nulla). Per fare questo dobbiamo applicare una forza
esterna FE che annulli esattamente la forza F , in modo che il sistema sia
soggetto, istante per istante, ad una forza nulla e non subisca accelerazioni.
Consideriamo ora il teorema delle forze vive: l’energia cinetica è nulla lungo
tutta la trasformazione e cosı̀ è la sua variazione e, quindi, il lavoro totale.
Questo è effettuato sia dalla forza F (x) del sistema, per la quale è uguale
alla variazione di energia potenziale, sia dalla forza esterna FE e si scrive:
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
33
Z
Li→f =
f
F~ · d~s +
i
f
Z
F~E · d~s = U (i) − U (f ) +
i
da cui si ricava:
Z
Lest =
Z
f
F~E · d~s
i
f
F~E · d~s = U (f ) − U (i)
i
ossia il lavoro esterno è uguale alla variazione di energia potenziale del sistema. Se il lavoro della forza esterna è positivo (ad esempio quando solleviamo lentamente un corpo opponendoci alla forza di gravità) l’energia potenziale aumenta. Nel caso contrario quando l’energia potenziale diminuisce il
lavoro fatto dall’esterno è negativo.
Dunque, il lavoro fatto dalla forza esterna per portare (senza variazione
di energia cinetica) il corpo da i a f è stato convertito in energia potenziale.
Questa poi può essere “usata” dal sistema, ad esempio si può trasformare in
energia cinetica o in altre forme, come vedremo pi ù avanti nel corso. Questo
è ad esempio il tipico modo in cui può funzionare una pompa: si usa una
forza esterna per aumentare l’energia potenziale del sistema (quindi come
sappiamo si fa spostare il sistema contro le linee di forza di F (x)) sollevando
in un serbatoio sopraelevato una certa quantità di acqua. Alla fine questa
energia è disponibile e facendo ridiscendere l’acqua lungo le linee di forza si
può recuperare l’energia sotto altra forma.
5.5 Oscillatori soggetti ad attrito
Abbiamo visto che una molla ideale è un sistema conservativo. L’energia totale dell’oscillatore elastico si mantiene costante e, durante il moto, l’energia
cinetica più l’energia potenziale elastica eguagliano l’energia totale. Durante
la oscillazione la energia cinetica aumenta all’aumentare della velocità ed è
quindi massima nel punto di mezzo delle oscillazioni, dove l’energia potenziale è nulla. Quando la distanza dal punto di equilibrio aumenta il modulo
della velocità e quindi l’energia cinetica diminuiscono e la variazione si ritrova sotto forma di aumento dell’energia potenziale che è massima nei punti di
inversione dell’oscillatore, quando la velocità si annulla e cambia segno. In
queste condizioni ideali una molla messa in movimento con una certa energia
continua indefinitamente ad oscillare con la stessa ampiezza. L’esperienza
mostra che questa situazione non è realistica e che ogni oscillatore risente di
una perdita di energia dovuta alle forze dissipative ineliminabili nei sistemi
reali.
Cerchiamo di descrivere in un sistema meccanico relativamente semplice
questo fenomeno. Usiamo per concretezza il linguaggio di un sistema meccanico anche se le considerazioni seguenti hanno validità generale. In assenza
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
34
di attrito il moto di un oscillatore ideale è soggetto ad un’ unica forza, quella
di richiamo elastica
Fel = −ks
Possiamo schematizzare l’ attrito come una forza contraria alla velocità,
quindi
Fat = −µv
La risultante é la somma delle due forze ed é ció che compare a secondo
membro dell’ equazione di Newton:
ma = −µv − ks
Come nel caso senza attrito conviene dividere per m. In assenza di attrito il
parametro tipico dell’oscillatore era la frequenza propria che qui indicheremo
con ω0 . Inoltre chiamiamo γ = µ/m:
d2 s
ds
+ γ + ω02 s = 0
(5.18)
2
dt
dt
Dal punto di vista della modellizzazione fisica questo è tutto. Resta da cercare la soluzione della (4.18).Essa che è una equazione differenziale del secondo ordine (compare la derivata seconda) lineare (la funzione incognita
s(t) compare sempre all’ordine 1) e con i parametri costanti (a coefficienti
costanti). Inoltre essa é omogenea ossia il secondo membro è nullo. Esiste
una procedura standard, collegata alla risoluzione di equazioni algebriche,
per risolvere questa famiglia di equazioni; lo studente la apprenderà nei corsi
di matematica.
Qui noi vogliamo esplorare la soluzione avendo in mente la controparte
reale dell’equazione, l’oscillatore che dissipa energia. Vogliamo in particolare
metterci nella condizione in cui l’oscillatore dissipa poca energia o, come si
usa dire, è debolmente smorzato. Abbiamo già risolto il caso limite di
assenza di attrito (γ = 0). La soluzione è un’oscillazione armonica, ossia
indipendente dall’ampiezza della oscillazione, alla frequenza ω0 :
s(t) = A cos(ω0 t − φ)
Per un piccolo attrito γ 1 ci aspettiamo che il sistema sia ancora un oscillatore, ma che progressivamente la ampiezza dell’oscillazione diminuisca.
Possiamo cercare una soluzione del tipo:
s(t) = A(t) cos(ω0 t − φ)
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
35
dove abbiamo supposto che la frequenza di oscillazione non risenta della
presenza dell’attrito11 . La debolezza dello smorzamento si riflette nel fatto
che l’ampiezza dell’oscillazione decresce molto lentamente e sono necessari
molti periodi di oscillazione per osservare una apprezzabile diminuzione della
ampiezza. Volendo sostituire la soluzione ipotizzata nella (4.18) calcoliamoci
la derivata prima e seconda di s(t) nella forma ipotizzata:
ds
dA
=
cos(ω0 t − φ) − ω0 A(t) sin(ω0 t − φ)
dt
dt
e, derivando ancora
d2 s
d2 A
dA
=
cos(ω0 t − φ) − 2ω0
sin(ω0 t − φ) − ω02 A cos(ω0 t − φ)
2
2
dt
dt
dt
poi effettuiamo la sostituzione eliminando i termini simili opposti (l’ultimo
termine della derivata seconda e il termine lineare dell’equazione):
d2 A
dA
dA
cos(ω0 t−φ)−2ω0
sin(ω0 t−φ)+γ
cos(ω0 t−φ)−γω0 A(t) sin(ω0 t−φ) = 0
dt2
dt
dt
Ora sfruttiamo la debolezza dello smorzamento e dunque il fatto che l’ampiezza varia lentamente e sono piccole la sua derivata prima e ancora di più la
sua derivata seconda. I termini che contengono la derivata seconda oppure il
prodotto della quantità piccola γ per la derivata prima, si possono trascurare
rispetto agli altri e siamo ridotti a risolvere l’equazione semplificata:
−2ω0
dA
sin(ω0 t − φ) − γω0 A(t) sin(ω0 t − φ) = 0
dt
che, dividendo per il seno in comune e per ω0 , si riduce ad una equazione di
primo ordine nella incognita A(t):
dA
γ
=− A
dt
2
che ha la consueta soluzione:
γ
t
A(t) = A0 e 2
−
ovvero l’ ampiezza decresce esponenzialmente con costante di tempo τ =
2/γ. Allora in questa approssimazione di piccolo attrito la soluzione dell’equazione del moto è:
11
In effetti nella soluzione esatta c’è una piccola diminuzione della frequenza che, in
prima approssimazione, trascuriamo. L’espressione esatta è :
r
γ2
ω = ω02 −
4
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
36
γ
t
s(t) = A0 e 2 cos(ωt − φ)
−
(5.19)
Si noti che,in accordo con quanto visto sinora,lasoluzione dellaequazione
delmoto contiene duecostanti arbitrarie A e φ che servono ad adattare la
soluzione alle condizioni iniziali. I due cambiamenti rispetto alla soluzione
della molla conservativa sono:
• la frequenza è leggermente più bassa della frequenza propria ω0 (vedi
nota)
• l’ampiezza delle oscillazioni decresce esponenzialmente
In figura è mostrata un oscillazione smorzata della forma (4.19).Le curve
tratteggiate che uniscono i massimi (o i minimi) del grafico sono due esponenziali. Ad esempio, la curva che passa per i massimi ha l’espressione
γ
− t
y = A0 e 2 .
Es.15
Per accertarsi di avere ben capito il significato dei parametri che compaiono nella (4.19),
si ricavino graficamente dalla figura i valori di A0 , ω γ e φ.
5.5.1 Esempio svolto: il pendolo semplice smorzato
Uno dei sistemi meccanici più importanti nella storia del pensiero scientifico
è senza dubbio il pendolo semplice, studiato sin dalla fine del XVI secolo
dal grande scienziato pisano Galileo Galilei. Un pendolo semplice è una
massa m fissata ad un estremo di una corda ideale, di lunghezza l il cui
altro estremo è vincolato. Nel pendolo semplice si considerano solo i moti
nel piano che contiene la corda e il campo di gravità ~g . Nei casi realistici
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
37
oltre alla forza di gravità la massaè soggetta anche ad una forza viscosa che
per piccole velocità possiamo schematizzare avente modulo µ v.
Il moto del pendolo (vedi figura) si svolge lungo un arco di circonferenza
ed è possibile individuarne la posizione mediante la coordinata s che indica
lo spostamento lungo la traiettoria. Prendiamo come positivo per s il senso antiorario e scegliamo come origine il punto più basso della traiettoria
(equilibrio).
Tra lo spostamento s e l’angolo θ che la corda fa con la verticale sussiste la
relazione univoca (relazione tra angolo al centro ed arco in una circonferenza
di raggio l):
s = lθ
che si estende anche alle derivate di s, considerando che l è costante:
ds
dθ
=l ;
dt
dt
d2 s
d2 θ
=
l
,
dt2
dt2
per cui il moto può essere descritto altrettanto bene prendendo come variabile θ. In assenza di attrito, l’equazione del moto per lo spostamento lungo
s vale:
d2 θ
d2 s
ma = m 2 = ml 2 = Fs = −mg sin θ ,
dt
dt
dove con Fs si è indicata la forza lungo s, ossia tangente alla circonferenza.
L’equazione differenziale da risolvere è dunque nell’incognita θ(t):
d2 θ
g
= − sin θ
dt2
l
che è ovviamente di secondo ordine, derivando dalla equazione di Newton
ma non-lineare in quanto la funzione incognita compare come argomento
del seno che non è una funzione lineare. Per questo motivo la soluzione dell’equazione di sopra non è affatto semplice e non può essere data in forma di
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
38
funzioni elementari. Ovviamente esistono metodi numerici che permettono
di approssimare quanto si vuole la soluzione e metodi analitici superiori che
rendono possibile la soluzione con approssimazione piccola a piacere. Per i
nostri scopi è più interessante limitarsi a spostamenti piccoli dalla posizione
di equilibrio, ossia alle piccole oscillazioni per le quali la forza può essere
approssimata con una retta. In effetti, come è noto, per angoli piccoli si può
approssimare il seno con l’angolo:
sin θ ∼ θ
e la equazione del pendolo si riduce a quella ben nota dell’oscillatore armonico:
d2 θ
g
=− θ
2
dt
l
che ha una frequenza propria:
r
g
ω0 =
l
indipendente dall’ampiezza delle oscillazioni (nella approssimazione di piccole oscillazioni).
Es.16
Applicare la procedura di piccole oscillazioni per ilmoto unidimensionale, enunciata nel
paragrafo sulla molla verticale, al caso del pendolo semplice per cui F (θ) = −mg sin θ.
Es.17
Quanto deve essere lunga l’asta di un pendolo che abbia un periodo di 2 secondi?
In presenza di forza di attrito proporzionale alla velocità v = ds/dt =
ldθ/dt, la equazione del moto si modifica e diventa:
d2 θ
g
µ dθ
=− θ−
2
dt
l
m dt
che ha la stessa forma dell’equazione dell’oscillatore elastico smorzato ed ha
quindi
p una soluzione, nell’incognita θ(t) del tutto analoga alla (4.19)in cui
ω ' g/l e γ = µ/m:
µ
θ(t) = θ0 e− 2m t cos(ω t − φ)
con:
r
µ2
' ω0
4m
dove l’approssimazione di confondere la frequenza effettiva con ω0 è tanto
meglio verificata quanto minore è l’attrito.
ω=
ω02 −
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
39
Misura della costante di smorzamento
Le soluzioni per l’oscillatore smorzato forniscono un metodo per misurare
il coefficiente γ della forza di attrito, con il quale si può stimare l’ordine di
grandezza della forza dissipativa e, quindi della perdita di energia dall’oscillatore all’ambiente esterno.
Per illustrare questo calcolo consideriamo un pendolo di un metro di
lunghezza che è lasciato andare da fermo ((dθ/dt)0 = 0) ad un angolo iniziale
θ0 = 15◦ . Per effetto dell’attrito viscoso dopo τ = 1000 secondi l’ampiezza
di oscillazione si riduce a θτ = 5.50◦ . Determinare il valore di µ/2m.
Si noti, innanzitutto che il pendolo in questione, continua ad oscillare
con una ampiezza apprezzabile dopo circa 15 minuti. Ci aspettiamo quindi
di essere in condizioni di debole smorzamento. Abbiamo visto che quando
la velocità angolare iniziale è nulla e lo smorzamento è piccolo la soluzione
è, con buona approssimazione:
µ
θ(t) = θ0 e− 2m t cos(ω0 t)
ossia una oscillazione alla frequenza libera con un ampiezza esponenzialmente
decrescente. Al tempo t = 0 l’ampiezza è θ0 e ad un tempo τ vale12 :
b
θtau = θ0 e− 2m τ
facendo il rapporto tra la prima e la seconda ampiezza si ottiene:
r=
b
θτ
= e− 2m τ
θ0
e calcolando il logaritmo naturale ad ambo i membri:
−
b
1
= ln r
2m
τ
Nel nostro caso r = 5.50/15 e τ = 1000 s da cui si ricava:
b
= 10−3 s−1
2m
12
A rigore si dovrebbe considerare un tempo a cui il coseno vale 1, ossia un multiplo del
periodo. Tuttavia, se lo smorzamento è piccolo in un periodo l’ampiezza cambia pochissimo
per cui un qualunque istante può essere confuso con un istante in cui l’oscillazione più
vicina è stata completata, con un errore trascurabile. In alternativa si può tracciare, come
in figura la curva esponenziale che passa per i massimi del grafico orario dell’oscillazione
smorzata.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
40
Es.18 Si consideri il grafico di figura. Si consideri l’intervallo di tempo T1/2 in cui l’ampiezza
si è ridotta da un valore alla sua metà, ossia r = 2, e scrivere:
γ=
2 ln 2
b
=
m
T1/2
Provare, facendo il calcolo sulla figura che per quella oscillazione γ ' 0.2 s−1 .
5.5.2 Fattore di qualità di un oscillatore
È ben noto l’uso pratico degli oscillatori come campioni di tempo ed orologi.
Qualunque fenomeno periodico pu
o essere usato come misura del tempo e abbiamo già accennato all’uso delle
oscillazioni di un cristallo di quarzo come parte del meccanismo dei moderni
orologi. È evidente anche che la presenza di forze di attrito rende necessario rifornire l’oscillatore di energia mano mano che questa viene dissipata.
È questa una delle funzioni delle batterie che alimentano gli orologi. Per
caratterizzare la perdita di energia di un oscillatore si conviene di definire
un parametro, detto fattore di qualità Q o, in inglese, Q-factor come:
Q = 2π
Energia immagazzinata
energia persa in un ciclo
Vediamo di esprimere Q per un oscillatore meccanico smorzato di frequenza
ω0 e fattore di smorzamento γ. L’energia immagazzinata in un oscillatore
con un debole smorzamento, è, ad un certo istante, proporzionale al quadrato
della ampiezza di oscillazione secondo:
1
E = kA(t)2
2
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
41
e, dopo un ciclo di oscillazione, la ampiezza si è ridotta e cosı̀ l’energia. La
energia persa è:
1
γT
∆E = E(t) − E(t + T ) = kA(t)2 (1 − e−γT ) '
kA(t)2 = γT E(t)
2
2
per cui il fattore Q risulta:
Q = 2π
2π
ω
E
=
=
∆E
γT
γ
5.5.3 Oscillatore forzato
Per quanto visto, a causa dell’attrito qualunque oscillatore lasciato libero
prima o poi si ferma, con un certo tempo caratteristico. Dato che l’oscillatore smorzato rappresenta con un notevole grado di approssimazione il
moto libero dei sistemi in prossimità dei punti di equilibrio, possiamo osservare che questo movimento è caratterizzato da due parametri, la frequenza
di oscillazione e la costante γ di smorzamento il cui inverso è appunto il
tempo caratteristico. Se un sistema subisce una perturbazione che lo sposta
dalla sua condizione di equilibrio stabile esso compie oscillazioni intorno alla
posizione di equilibrio con frequenza caratteristica che dipende dalla forza
di richiamo e la cui ampiezza decresce in un tempo che dipende dalla entità
delle forze dissipative.
Una cosa molto importante è come un oscillatore di questo tipo risponde
ad una sollecitazione esterna, una forza nel linguaggio meccanico. Iniziamo
dal caso in cui si trascura l’attrito e sia F (t) una forza imposta dall’esterno
al sistema, l’equazione del moto diventa
ma = −ks + F (t)
Dividendo per m ed usando le stesse notazioni di prima
d2 s
1
+ ω02 s = F (t)
2
dt
m
Consideriamo in particolare una forza di tipo periodico
F (t) = F cos ωt
che ha una frequenza che in generale è diversa da quella propria dell’oscillatore. L’equazione da risolvere è dunque:
1
d2 s
+ ω02 s = F cos ωt
(5.20)
2
dt
m
Questa è un’equazione del secondo ordine lineare, ma il secondo membro
non è nullo ed è perciò detta non omogenea13 . Si puó dimostrare che la
13
Se s è una soluzione non è vero che anche cs(t) lo è.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
42
soluzione generale della (4.20) si ottiene aggiungendo alla soluzione generale
della equazione omogenea associata, ossia quella con il secondo membro nullo, una soluzione della (4.20) stessa. Si noti che ‘e sufficiente una soluzione
particolare ovvero una funzione che sostituita soddisfi l’equazione, senza
altre prescrizioni. Dato che a secondo membro abbiamo una funzione oscillante consideriamo come soluzione di prova una oscillazione dello stesso
tipo:
s(t) = A cos ωt
(5.21)
che, sostituita nella equazione non omogenea dà:
−ω 2 A cos ωt + ω02 A cos ωt =
1
F cos ωt
m
Si vede dunque che la (4.21) è effettivamente una soluzione se:
A=
F
− ω2)
m(ω02
Abbiamo trovato che la equazione non omogenea ammette una soluzione
oscillante alla stessa frequenza della forza esterna ed in fase con essa la
cui ampiezza dipende da quanto la frequenza della forza esterna si avvicina alla frequenza propria dell’oscillatore. È questa una situazione che ha
una controparte intuitiva. Consideriamo, ad esempio, una altalena che è
schematizzabile come un pendolo e la cui frequenza propria è fissata dalla
sua lunghezza. Sappiamo bene che se vogliamo ottenere una oscillazione di
grande ampiezza occorre che applichiamo una spinta con la stesso periodo
dell’oscillazione, ossia dobbiamo spingere ogni volta che l’altalena compie
una oscillazione. Il dato non realistico, che dipende dal fatto che abbiamo trascurato l’attrito è che se le frequenze interna ed esterna coincidono
l’ampiezza della oscillazione diverge, ossia diventa infinita. Come vedremo
questa incongruenza è risolta considerando che l’oscillatore dissipa energia.
Torniamo allora all’oscillatore (debolmente) smorzato e consideriamo la sua
equazione del moto in presenza di una forza oscillante esterna:
d2 s
ds
1
+ γ + ω02 s = F cos ωt
2
dt
dt
m
(5.22)
Soluzione della equazione (4.22)
Per risolvere la equazione (4.22) ricorriamo ad un metodo elementare anche
se un poco laborioso. Ricordiamo che dobbiamo cercare una soluzione particolare s(t) che soddisfi l’equazione differenziale completa. Questa dovrebbe
poi essere sommata alla soluzione generale della omogenea che, abbiamo
visto sopra, ha un andamento esponenzialmente decrescente. Se aspettiamo
un tempo sufficientemente lungo questa parte della soluzione si smorza e
rimane la sola soluzione della non omogenea che, quindi risolve il problema.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
43
Alcune utili formule
Premettiamo alla procedura di soluzione della (4.22) alcune proprietà delle funzioni trigonometriche che ci sono utili nel seguito.
• Prima di tutto definiamo il valore medio < f > di una
funzione f (x) definita nell’intervallo [a, b]:
Z b
1
< f >=
f (x)dx
b−a a
da questa definizione discende che la media su qualunque
intervallo di una costante è la costante stessa.
• Per una funzione periodica di periodo T la media sul
periodo è quindi, in base alla definizione precedente:
Z
1 T
f (t)dt
T 0
• è immediato verificare usando la formula del calcolo integrale che la media sul periodo delle funzioni sin e cos è
nulla.
• Poichè vale lidentità trigonometrica sin2 + cos2 = 1 vale per
la media sul periodo:
< sin2 + cos2 >=< 1 >= 1
e siccome le due funzioni trigonometriche sono identiche a
parte una traslazione sull’asse dei tempi:
< sin2 + cos2 >=< sin2 > + < cos2 >= 2 < cos2 >= 2 < sin2 >= 1
In conclusione, si è trovato:
< sin2 >=< cos2 >=
1
2
• Il valore medio sul periodo del prodotto sin cos è nullo. Si
può dimostrarlo con la formula del calcolo integrale verificando che una primitiva di sin x cos x è sin2 x/2. quindi:
Z
1 T
2π
2π
1
< sin cos >=
sin t cos tdt =
(sin2 2π−sin2 0) = 0
T 0
T
T
2T
• l’ultima proprietà di cui abbiamo bisogno sono le formula
di sottrazione cos(α − β) = cos α cos β − sin α sin β e sin(α −
β) = cos α sin β + sin α cos β Ne avremo bisogno nella forma
particolare:
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
44
cos(ωt − φ) = cos ωt cos φ − sin ωt sin φ
sin(ωt − φ) = cos ωt sin φ + sin ωt sin φ
(5.23)
Torniamo dunque alla equazione (4.22) e cerchiamo una sua soluzione
particolare nella forma:
s(t) = Acos(ωt − φ)
(5.24)
L’effetto della sostituzione è il seguente:
−ω 2 Acos(ωt − φ) − ωγA sin(ωt − φ) + ω02 Acos(ωt − φ) =
1
F cos ωt
m
Dobbiamo determinare le costanti A che rappresenta l’ampiezza dell’oscillazione indotta dalla forza esterna e φ che indica lo sfasamento tra questa e
l’oscillazione. Indichiamo allo studente la procedura senza sviluppare tutti
i calcoli che lasciamo per esercizio.
• Si moltiplichi ambo i membri per cos(ωt−φ) e, utilizzando le proprietà
sopra elencate si mostri che facendo il valor medio membro a membro
si ottiene:
F
cos φ
(ω02 − ω 2 )A =
m
• Si moltiplichi ambo i membri per sin(ωt − φ) e si mostri facendo il
valor medio membro a membro:
−ωγA =
F
sin φ
m
• A questo punto è semplice ricavare dalla ultime due equazioni la fase
φ e l’ampiezza dell’oscillazione. In particolare, quest’ultima si trova
facendo il quadrato di entrambe le equazioni e sommando i risultati
membro a membro. Lo studente sarà in grado di trovare:
A=
F
1
p
2
m (ω0 − ω 2 )2 + ω 2 γ 2
(5.25)
Come si vede dalla (4.25) l’ampiezza, che cresce con il modulo della
forza, ha un massimo per ω = ω0 e decresce simmetricamente rispetto a
ω0 diventando molto piccola per frequenze ω molto diverse dalla frequenza
propria dell’oscillatore. Ciò è dovuto al fatto che la forza esterna è talmente
veloce rispetto al periodo proprio dell’oscillatore che questo non riesce a
seguire i cambiamenti oppure cosiı̀ lenta che il suo effetto è in media nullo.
In entrambi i casi, l’oscillatore forzato fuori frequenza si muove pochissimo.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
45
5.5.4 Il fenomeno della risonanza
Il caso più interessante si ha per frequenze ω ∼ ω0 . In queste condizioni si
possono fare le seguenti approssimazioni:
γω ' γω0
ω02 − ω 2 = (ω0 + ω)(ω0 − ω) ' 2ω0 (ω − ω0 )
che sostituiamo nella (4.25), trovando:
A=
1
F
r
2mω0
γ2
(ω − ω0 )2 +
4
Ricordando che l’energia è proporzionale al quadrato dell’ampiezza:
1
F2
1
E = kA2 = mω02 A2 =
2
2
8m
1
(ω − ω0 )2 +
γ2
4
Il valore massimo della ampiezza si ha per ω = ω0 e vale:
Amax =
F
mω0 γ
Per Amax è massima l’energia accumulata nell’oscillatore dalla forza esterna:
F2
1
Emax = mω02 A2max =
2
2mγ 2
e possiamo riscrivere l’energia dell’oscillatore in termini di Emax :
E = Emax
γ2
4
(ω − ω0 )2 +
γ2
4
(5.26)
Il grafico di questa funzione che è detta Lorentziana14 indica chiaramente
che il sistema accumula energia se viene eccitato in una banda di frequenza di
larghezza tanto maggiore quanto maggiore è γ intorno alla frequenza propria
ω0
14
Il nome deriva da quello del fisico olandese Hendrik Antoon Lorentz, uno dei maggiori
scienziati del XIX secolo, premio Nobel nel 1902.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
46
In pratica se si misura l’energia dell’oscillatore mentre si varia la frequenza
della forza esterna attraverso una frequenza propria si osserva l’andamento
caratteristico a campana ed il fenomeno viene chiamato risonanza con un
termine derivato dall’acustica. Come si vede dalla figura e si può calcolare
dalla (4.26), la larghezza in frequenza della curva di risonanza a metà del
valore massimo coincide con il coefficiente γ che prende il nome appunto di
larghezza a mezza altezza. La registrazione del grafico dell’energia immagazzinata in funzione di ω è un modo per determinare sperimentalmente γ
che lo ricordiamo, esprime la perdita di energia dall’oscillatore verso l’ambiente. Alternativamente, anziché osservare l’energia acquisita dell’oscillatore
si può decidere di osservare l’energia persa dal sistema che produce la forza
esterna sull’oscillatore. Abbiamo già visto un esempio quando abbiano parlato dello spettro infrarosso di assorbimento. In quel caso gli oscillatori erano
le molecole e si osservava la perdita di energia della luce che attraversava un
campione contenente un insieme di molecole, ad esempio un gas. La larghezza delle righe osservate si può mettere in relazione alle proprietà dissipative
del sistema molecolare. Tipicamente, ogni molecola ha il suo caratteristico
spettro, e la forza sollecitante è il campo elettrico rapidamente variabile di
una radiazione incidente. Se la radiazione contiene molte frequenze (un continuo) solo quelle in risonanza saranno assorbite. Il grado di assorbimento è
proporzionale alla quantità di sostanza presente. perció é ovvio che un tale
mezzo di indagine è il sistema pi efficiente per trovare anche piccolissime
quantità di sostanze in una soluzione o genericamente in un corpo (analisi
spettroscopica). Nella figura è schematizzato uno spettrogramma nel quale
l’ altezza (intensità) delle righe è proporzionale al quadrato della forza, la
larghezza di ogni riga è il relativo γ e la posizione indica la frequenza di
risonanza.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
47
Ancora sul fattore di qualità Q
Abbiamo definito Q come il rapporto tra l’energia immagazzinata e l’energia persa per ciclo (moltiplicato per 2π. Per calcolare l’energia ∆E persa
dall’oscillatore in un ciclo consideriamo il lavoro della forza dissipativa di
modulo µv nel tempo dt in cui l’oscillatore percorre il tratto ds = vdt. Il
lavoro fatto in questo tempuscolo è:
dL = F ds = −mγvds = −mγv 2 dt
In condizioni stazionarie, la soluzione s(t) = A(ω) cos ωt con A(ω) data dalla
(4.25). La velocità si trova per derivazione e il lavoro elementare vale:
dL = −mγω 2 A2 sin2 ωt
Integrando su un periodo e sfruttando ancora che la media di sin2 è uguale
a 1/2 si trova il lavoro totale, ossia la variazione di energia e prendendone il
modulo:
T
∆E = mγω 2 A2
2
L’energia (media) immagazzinata è come detto sopra:
1
E = mω 2 A2
2
per cui sostituendo ω 2 A2 = 2E/m nella precedente si trova:
∆E = γET
ed il fattore di qualità:
Q = 2π
E
2π
ω0
=
=
∆E
γT
γ
L’osservazione della risonanza è dunque un modo anche per determinare il
fattore di qualità, facendo il rapporto tra la frequenza del picco di risonanza
per la larghezza a mezza altezza.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
48
Oscillazioni elettriche: circuito RLC
Durante questo corso abbiamo trattato le proprietà di due componenti elettronici di base, il resistore (resistenza) e il condensatore. Il loro comportamento è definito da due equazioni costitutive, cioè da due relazioni che
connettono i parametri essenziali che ne definiscono lo stato. Per il resistore, che modellizza un materiale conduttore di elettricità, ossia un mezzo
nel quale sono presenti particelle portatrici di carica elettrica che possono
muoversi quando sono soggette ad un campo elettrico, i parametri essenziali sono appunto la corrente I che attraversa il resistore e la differenza di
potenziale elettrico15 VR (che indica la presenza di un campo elettrico diretto dalla zona a potenziale più alto a quella a potenziale più basso). Per una
resistenza ideale le due grandezze elettriche sono direttamente proporzionali
secondo la legge di Ohm:
V = RI
Il coefficiente di proporzionalità R è detto resistenza del resistore.
Per il condensatore, che modellizza un sistema di due conduttori, detti
it armature del condensatore, nel quale si può realizzare una separazione
spaziale di cariche, le grandezze che ne descrivono lo stato sono la carica
elettrica Q che si trova sulle due armature (una carica +Q su una delle due
armature e una carica −Q sull’altra) e una differenza di potenziale16 VC tra
i due conduttori. Le due grandezze sono proporzionali e vale:
Q = CVC
Il coefficiente di proporzionalità C è detto capacità del condensatore. Esiste
un terzo componente ideale per i circuiti elettrici elementari, detto induttore. Esso modellizza la risposta di un sistema nel quale si ha un passaggio
di corrente variabile. Il principio fisico sul quale essa si basa è connesso alle
leggi del magnetismo e per il momento non lo trattiamo. Ci basta scrivere
l’equazione costitutiva che dice che c’è una proporzionalità tra la differenza
di potenziale ai capi dell’induttore, indicata generalmente con la lettera L e
la derivata temporale della corrente elettrica:
VL = L
dI
dt
Il coefficiente L è detto induttanza del componente e si misura, come si
evince dalla equazione in V · s/A ossia in Ω · s che prendono il nome di
Henry (H).
15
Indichiamo questa differenza di potenziale con il simbolo VR per ricordare che essa è
la differen opportuneza di potenziale ai capi del resistore R
16
Indichiamo questa differenza di potenziale con il simbolo VC per ricordare che essa è
la differenza di potenziale tra le armature del condensatore C
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
49
Circuito RLC serie
Abbiamo visto già anche la combinazione di due degli elementi circuitali
fondamentali in un unico circuito, formato da un condensatore e un resistore in serie. Rimandiamo al capitolo 1 di queste dispense per rivedere in
dettaglio il metodo di soluzione. Qui ricordiamo che esso è basato sulle proprietà delle grandezze elettriche che sono espresse dalle leggi di Kirchoff. In
particolare, si può applicare ad un qualunque circuito elettrico la proprietà
che se si sommano tutte le differenze di potenziale lungo un cammino chiuso (che ritorna al punto di partenza), si deve trovare zero. Consideriamo
allora il più semplice circuito che comprende i tre componenti base posti in
serie secondo lo schema di figura. Il generatore sulla sinistra qui generalizza la batteria de circuito RC e può imporre ai suoi capi una differenza di
potenziale dipendente dal tempo v(t).
Intendiamo calcolare la corrente che circola nel circuito. Per una generica
v(t), saranno dipendenti dal tempo sia la corrente che indichiamo con la
funzione i(t), sia la carica q(t) sul condensatore. Queste sono dunque le
incognite del nostro problema. In effetti, come avveniva per il circuito RC
l’incognita è una sola essendovi la relazione:
i(t) =
dq(t)
dt
Applichiamo dunque la legge di Kirchoff al percorso chiuso che parte dal
terminale (-) del generatore, lo attraversa e attraversando successivamente
i tre componenti torna al punto di partenza:
v(t) − Ri(t) − L
di(t) q(t)
−
=0
dt
C
e, riscrivendola, mettendo al primo membro le funzioni incognite:
L
di(t)
q(t)
+ Ri(t) +
= v(t)
dt
C
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
50
Sostituendo i(t) con la derivata di q(t) e la derivata di i(t) con la derivata
seconda di q(t) si trova:
L
d2 q
dq
q
+R +
= v(t)
2
dt
dt
C
Abbiamo trovato che la carica sul condensatore soddisfa una equazione lineare di second’ordine non omogenea. La buona notizia è che essa è del tutto analoga all’equazione dell’oscillatore smorzato che abbiamo già studiato
risolto. Per utilizzare le soluzioni espresse sopra dobbiamo mettere in corrispondenza le grandezze che hanno la stessa posizione nelle due equazioni.
Per comodità riportiamo qui sotto l’equazione dell’oscillatore forzato:
m
d2 s
ds
+ µ + ks = F (t)
dt2
dt
Quindi vale la corrispondenza tra la funzione incognita s(t) che rappresenta
lo spostamento dall’equilibrio dell’oscillatore e la carica q(t) sul condensatore
e poi valgono le opportune seguenti corrispondenze:
L↔m
R↔µ
1
↔k
C
ovvero l’induttanza rappresenta la massa del circuito elettrico, la resistenza il coefficiente della forza viscosa (attrito) e l’inverso della capacità la
rigidità dell’oscillatore. Infine la tensione applicata equivale alla forza f (t).
Ricordiamo anche che la soluzione dell’oscillatore forzato veniva cercata nel
caso particolare di una forza armonica F0 cos(ωt) e che la soluzione veniva
cercata dopo avere diviso per la massa l’equazione per cui venivano fuori i
parametri γ = µ/m e omega20 = k/m. Nel caso del circuito RLC dividendo
per l’induttanza L si trovano le corrispondenze:
γ↔
R
L
ω02 ↔
1
LC
Oscillazioni smorzate
Consideriamo innanzitutto il caso in cui il generatore è un corto-circuito ossia ai suoi capi la d.d.p. è nulla: v(t) = 0. L’analogia con l’oscillatore è una
molla che viene spostata dalla posizione di equilibrio e lasciata andare in
modo che oscilli liberamente soggetta ad una forza di attrito proporzionale
alla velocità. Nel caso di un attrito debole sappiamo che il moto s(t) è un
oscillazione di frequenza prossima a ω0 la cui ampiezza decresce esponenzialmente secondo la (4.19). Qui la situazione è che inizialmente il condensatore
viene caricato mentre il circuito è interrotto per cui non può passare corrente
e il condensatore rimane carico. Alla chiusura del circuito, che equivale a lasciare andare la molla dopo averla spostata, è la carica q(t) sul condensatore
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
51
che compie le oscillazioni secondo una legge:
R
t
1
q(t) = Q0 e 2L cos( √
t − φ)
LC
−
(5.27)
Per calcolare la corrente basta fare la derivata della carica,come proponiamo
nel seguente esercizio.
Es.19
Derivando la (4.27) si mostri che la corrente oscilla alla stessa frequenza della carica del
condensatore e che è sfasata rispetto ad essa, ossia i massimi delle due oscilalzioni non coincidono.
Calcolare inoltre l’ampiezza delle oscillazioni della corrente
La più drammatica applicazione di un circuito RLC di interessse biotecnologico si ha probabilmente nei defibrillatori e nei dispositivi per la cardioversione. Entrambe queste famiglie di macchinari hanno come scopo di
liberare un impulso elettrico oscillante che interagisce con il muscolo cardiaco cercando di sopprimere oscillazioni anomale, aritmie, fibrillazioni ed
altro. Lo schema semplificato di un circuito per defibrillatore è rappresentato in figura dove le scatole tratteggiate rappresentano l’interruttore che
può essere spostato da una posizione in cui il condensatore è connesso ad
una batteria ad alta tensione e viene caricato (è la fase in cui nei telefilm di
ambiente ospedaliero l’operatore ordina: CARICA!) poi, quando il condensatore è carico i due elettrodi ( nella figura chiamati con il termine inglese
paddle) vengono appoggiati al torace del paziente che è modellizzato nel circuito dalla resistenza e all’ordine SCARICA! l’interruttore viene spostato
mettendo il condensatore carico in contatto con l’ induttore del circuito ed
il resistore attraverso i quali avviene il passaggio della corrente oscillante
che imprime degli impulsi al tessuto cardiaco in modo da opporsi alle oscillazioni aritmiche oppure a fare ripartire la conduzione cardiaca ritmica dopo
un arresto.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
52
Oscillazioni smorzate
La seconda situazione che consideriamo nel circuito RLC è l’equivalente della
oscillazione forzata di una molla soggetta ad una forza armonica. Qui consideriamo il corrispondente della forza che è la tensione elettrica v(t) imposta
dal generatore e prendiamo il caso in cui essa è una funzione sinusoidale del
tempo a frequenza angolare ω:
v(t) = V0 sin(ωt)
Come sappiamo è un fatto generale che la soluzione di una equazione differenziale lineare NON omogenea si trova sommando la soluzione della equazione
omogenea, che è quella che abbiamo appena visto nel caso delle oscillazioni
smorzate del circuito RLC libero, ad una soluzione particolare della equazione
completa. La cosa interessante è che per il circuito RLC, come per la molla
soggetta ad attrito, la parte dissipativa della dinamica fa sı̀ che la soluzione
della equazione omogenea tenda a scomparire (si smorza) e dopo un tempo
più o meno corto, che appunto si chiama comunemente transiente, rimane solo la soluzione della equazione non omogenea che è dunque la parte stazionaria della soluzione. Quest’ultima si scrive per il circuito elettrico come una
oscillazione alla frequenza della forza, ossia della tensione elettrica:
q(t) = A(ω) cos(ωt − φ)
con una ampiezza A che dipende in modo caratteristico dalla ω secondo la
(4.25) che, riscritta, facendo le solite corrispondenze tra caso meccanico ed
elettrico:
V0
1
r
A(ω) =
L
1
R
(
− ω 2 )2 + ω 2 ( )2
LC
L
Es.20 Mostrare che per debole
√ smorzamento R/L 1 e per frequenze ω prossime alla frequenza propria del circuito 1/ LC = ω0 , la ampiezza stazionaria delle oscillazioni forzate è bene
approssimata da:
V0
1
p
A(ω) =
2Lω0 (ω − ω0 )2 + γ 2
dove si è indicano con γ il rapporto R/2L.
Come abbiamo visto per l’oscillatore meccanico la relazione precedente
esprime il fenomeno della risonanza perché la ampiezza delle oscillazioni
della carica sul condensatore (e di conseguenza anche della corrente che ne
è la derivata temporale) dipendono dalla frequenza della tensione elettrica,
ossia del campo elettrico, in modo da avere un massimo pronunciato per ω =
ω0 (tanto più pronunciato quanto è pi‘u piccolo γ che resta al denominatore
quando le due frequenze sono uguali. e, inoltre è tanto più stretto la regione
in cui l’ampiezza è
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011
53
Es.21
Mostrare, con la relazione approssimata trovata all’esercizio prrecedente che l’ampiezza
√
dell’oscillazione diventa 1 2 di quella massima quando il detuning (disaccordo) tra le due frequenze
diventa |ω −ω0 | = γ. Essendo l’energia massima immagazzinata nel condensatore proporzionale al
quadrato della ampiezza della oscillazione della carica quanto si riduce l’energia rispetto al valore
massimo se ω = ω0 + γ? E per ω = ω0 − γ? Spiegare perché γ viene detta semilarghezza a
mezza altezza (Half Width Half Maximum (HWHM) della risonanza.
Dovrebbe essere a questo punto chiaro in che senso il circuito RLC è
selettivo in frequenza. Se esso viene sollecitato da frequenza diverse esso tende ad accumulare energia solo alla frequenza di risonanza restando
praticamente imperturbato per frequenze lontane dalla risonanza. Questa
selettività è tanto maggiore quanto minore è il termine dissipativo γ. Per
queste sue proprietà il circuito RLC è utilizzato nella funzione di sintonia degli apparecchi riceventi onde elettromagnetiche (radio, TV, cellulari
etc.). In effetti, si voglia ricevere il segnale da una stazione che trasmette
ad una frequenza ω, ossia irraggia un campo elettrico variabile che oscilla
alla frequenza ω. Allora si inserice nell’apparecchio ricevente un circuito
risonante (tipo RLC) del quale si possa variare, tipicamente mediante un
condensatore variabile, la frequenza di risonanza ω0 . Il comando che realizza questa variazione può, ad esempio, essere una manopola che ruotando
modifica la posizione delle armature del condensatore, variandone la capacità. Quando la manopola è nella posizione in cui la frequenza della radio
coincide con quella della stazione trasmittente il segnale trasferisce energia
al circuito e la corrente che circola può essere elaborata in modo da fornire
un segnale udibile tramite un altoparlante. Ruotando la manopola si mette
in risonanza la radio con altre stazioni. Ovviamente per evitare interferenze,
ossia la situazione in cui vengono ricevuti i segnali da più stazioni contemporaneamente, si deve avere una selettività elevata se le stazioni sono molto
vicine.
F.Maccarrone, G.Paffuti - Fisica per Biotecnologie - 2010/011