Capitolo 1
Procedure di fit
Si supponga di aver effettuato una serie di N coppie di misure di due grandezze
x ed y che si pensano legate tramite una funzione y f x; a , dove con a si
intende un insieme di M parametri ignoti, corrispondenti ad altrettante grandezze
fisiche che si vogliono determinare: effettuare un fit significa dare una stima del
loro valore ”vero” a0 , cercando quei valori b
a per i quali la “distanza” (dove la
“distanza” è un concetto che va ancora definito) tra i valori y misurati e quelli
calcolati tramite f a partire dai corrispondenti valori di x risulta minore.
= ( )
La stima delle grandezze fisiche non è altro che una misura indiretta, che porterà
ba a0 , e quindi ad una incertezza a associata alla
dunque ad un errore a
misura.
=
Solitamente, si adoperano due tipi di fit: nel caso in cui le incertezze su y siano
tutte uguali, o peggio siano sconosciute, si adopera il metodo dei minimi quadrati.
Se invece le incertezze su y risultano sensibilmente diverse tra di loro, si preferisce
adoperare il metodo del minimo 2 .
Perché il fit possa avere un senso, in numero di parametri indipendenti da cui
dipende la curva deve risultare strettamente minore del numero di misure a disposizione: questo dipende solamente da considerazioni di natura algebrica: se
le variabili indipendenti fossero maggiori, il minimo risulterebbe indeterminato.
La differenza tra il numero di misure ed il numero di parametri è detta numero di
gradi di libertà del fit: ngl N M . 1
=
1
Una operazione di fit non è altro dunque che una condensazione dell’informazione: ad esempio, possiamo immaginare di effettuare un fit mediante una retta ad un insieme N di dati. In questo
caso, gli N numeri iniziali si riducono a solamente due, con in più l’ipotesi che le variabili x ed y
siano legate da una relazione lineare. Oviamente, parte dell’informazione va persa: ad esempio,
se il legame tra le variabili contenesse un piccolo termine non lineare, di questo non rimarrebbe
traccia dopo il fit, mentre probabilemente una analisi accurata dei dati originari sarebbe in grado
1
CAPITOLO 1. PROCEDURE DI FIT
2
1.1 Fit col metodo dei minimi quadrati
Vediamo in dettaglio il caso in cui la “distanza” corrisponde allo scarto quadratico
tra la funzione ed i valori misurati, caso che costituisce appunto il metodo dei
minimi quadrati.
Si supponga che le N misure xi siano effettuate con errore nullo, o comunque trascurabile, e che le misure yi siano affette da una stessa indeterminazione y , nota
o ignota non importa; si parta per comodità da un valore arbitrario dei parametri a,
e si calcoli la differenza tra i valori misurati y e quelli calcolati tramite la funzione
f:
=
di
yi
f (xi ; a)
Le quantità di sono dette scarti o residui: in generale potranno essere positivi o
negativi, quindi non vanno bene per definire una distanza, che è sempre positiva.
Possiamo però, a partire dai residui, definire una “distanza” tra la funzione f ed i
valori osservati di y , prendendone il quadrato e costruendone la somma:
D2
=
N
N
X
X
d2 = [yi
i=1
i
i=1
f (xi ; a)℄2
Questa distanza, così definita, dipende solamente dai parametri a. È evidente che,
se la funzione rispecchia il reale legame tra le variabili, allora in corrispondenza
dei parametri ”veri” i residui saranno uguali agli errori sperimentali, e quindi a
media zero e deviazione standard y . Assumeremo quindi che i valori b
a in corrispondenza dei quali la sommatoria raggiunge il minimo siano la migliore stima
possibile dei parametri ”veri” a0 .
1.1.1 Stima delle incertezze
Nel caso in cui l’incertezza sulla misura di y sia ignota, o mal determinata, è
possibile effettuarne una stima a partire dal risultato del fit. Il metodo è il seguente:
dapprima si calcolano i parametri b
a minimizzando la distanza definita sopra; poi
a partire da questa si calcolano i residui. La deviazione standard dei residui dà
la stima dell’incertezza cercata. Ma attenzione: se abbiamo N misure, e il fit
contiene M parametri, allora il numero di gradi di libertà indipendenti sarà ngl
N M . Quindi la deviazione standard andrà calcolata utilizzando la formula :
=
di metterla in evidenza.
1.1. FIT COL METODO DEI MINIMI QUADRATI
dati =
sP
N
N 2
i=1 di
M
=
r
3
D2
N M
(1.1)
Questo metodo è molto utile, ma può dare risultati sbagliati se la funzione f
riproduce accuratamente la relazione vera tra x e y .
(x; a)non
Nel caso in cui esista una stima indipendente dell’incertezza y , è possibile confrontarne il valore con quello ottenuto dai dati: se i due valori non concidono,
perlomeno entro un fattore 2, è bene indagare le cause della discrepanza. Infatti
questo effetto potrebbe dipendere da svariati motivi, ad esempio:
La stima indipendente dell’incertezza su y potrebbe essere sbagliata: questo
è il caso più frequente, che non porta a gravi conseguenze sul piano pratico.
Le coppie di misure potrebbero non essere indipendenti: ad esempio, potrebbe esistere un errore sistematico comune a tutti i valori di y .
L’errore su x potrebbe non essere trascurabile.
I dati potrebbero essere legati da una relazione diversa da quella ipotizzata.
Il semplice confronto degli errori è però un test piuttosto rozzo della qualità dei dati, in quanto non tiene conto del numero di misure a disposizione. Si preferiscono
quindi adoperare test più raffinati, come quello del 2 .
1.1.2 Test del 2
Nel caso in cui l’errore nella misura delle ordinate sia conosciuto, è possibile
effettuare sulle misure il test del 2 : viene definita la quantità
N
X yi
2 =
i=1
N 2
f (x; ba) 2 X
di
=
=
y
i=1
D2
2
= (N
2
M ) dati
2
Si tratta, come si vede, essenzialmente della stessa quantità definita nell’equazione
??, calcolata per ogni misura, e sommata su tutte le misure: non è altro che il
rapporto tra il valore quadratico medio dei residui e la stima delle incertezze. Nel
caso in cui queste coincidano, il 2 vale pressappoco N M , ovvero il numero di
gradi di libertà residui dopo il fit. Quindi verificare che la quantità 2 = N M
(detto chi-quadro ridotto) sia pressappoco uguale ad uno equivale a confrontare le
stime degli errori ottenute dai dati e con metodi indipendenti.
(
)
CAPITOLO 1. PROCEDURE DI FIT
4
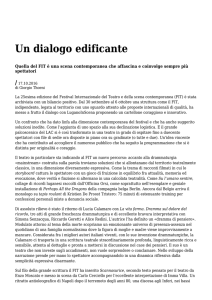
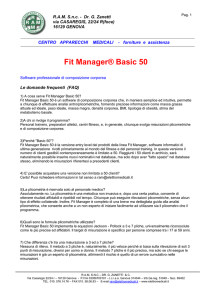
Figura 1.1: Procedura della stima degli errori: nella figura in alto, i punti corrispondenti agli errori sperimentali sono graficati senza barre di errore, assieme al
risultato del fit. Nella figura al centro, vengono mostrati i residui: le linee orizzontali corrispondo agli errori calcolati seguendo la procedura descritta. La figura in
basso è uguale a quella in alto, ma stavolta sono state aggiunte le barre di errore.
15
10
5
0
−5
0
2
4
6
8
10
12
0
2
4
6
8
10
12
0
2
4
6
8
10
12
4
2
0
−2
−4
15
10
5
0
−5
1.1. FIT COL METODO DEI MINIMI QUADRATI
5
Figura 1.2: Calcolo del 2 : nella figura in alto viene riportato il grafico dei dati
con la curva di fit e le barre di errore. Nella figura in mezzo sono invece mostrati
i residui. Infine nella figura in basso si vede il grafico di di = 2 : la somma delle
barre dà il valore di 2 . Si vede come il punto corrispondente ad x
, la cui
barra di errore non interseca il grafico dà alla sommatoria un contributo maggiore
di 1, mentre le altre danno un contributo minore.
(
)
=5
10
5
0
−5
−10
0
2
4
6
8
10
12
0
2
4
6
8
10
12
4
2
0
−2
−4
2
1.5
1
0.5
0
1
2
3
4
5
6
7
8
9
10
Però con il 2 si può fare molto di più: infatti è possibile calcolare la distribuzione
di probabilità della variabile casuale 2 nel caso in cui si abbiamo ngl gradi di
libertà. Dalla distribuzione di probabilità è possibile quindi farsi un’idea di quanto
risulti probabile il valore di 2 ottenuto nei dati che si stanno analizzando.
1.1.3 Fit polinomiale
In generale, data una funzione qualsiasi, la ricerca del minimo può presentare
una serie di problemi, dovuti a motivi matematici (la presenza di più minimi,
ad esempio) o fisici (quando il valore dei parametri corrispondente al minimo
non possiede significato fisico, ad esempio). Un caso interessante è però quello
CAPITOLO 1. PROCEDURE DI FIT
6
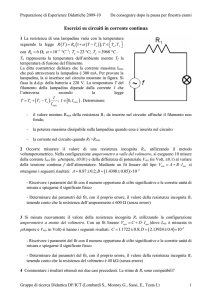
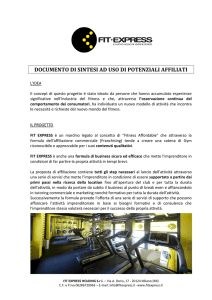
Figura 1.3: a) densità di probabilità del 2 per diversi gradi di libertà.
b) la stessa funzione, integrata fino a 1, mostra la probabilità di osservare un
valore del 2 più grande di quello ottenuto. Ad esempio, se otteniamo un 2 di
7.9 con 5 gradi di libertà (punto evidenziato in nero), dalla curva troviamo che la
probabilità di ottenere un valore più alto del 2 (e quindi dati che si discostano
maggiormente dalla curva osservata) è di circa il 16 %. Valori bassi della probalilità indicano che il fit riproduce male i dati sperimentali; d’altro canto valori
troppo alti possono generare il sospetto di una sovrastima delle incertezze.
+
5
10
a)
n=10
0
10
n=1
−5
10
−10
10
0
2
4
6
8
10
12
14
16
18
20
16
18
20
2
χ
1
b)
0.8
n=10
0.6
0.4
0.2
n=1
0
0
2
4
6
8
2
χ
10
12
14
1.1. FIT COL METODO DEI MINIMI QUADRATI
7
=P
M
k
che si ottiene quando la funzione f è un polinomio:f
k=1 ak x . In questo
caso, derivando rispetto ai vari valori di ak , si ottengono sempre equazioni lineari
facilmente risolvibili numericamente. La teoria generale esula da questo contesto,
ci limiteremo a trattare due casi particolari.
Costante
=
Si supponga una relazione del tipo: y
a0 , ovvero che non esista nessuna dipendenza dalla variabile x (in questa tipologia rientrano quei casi in cui viene
misurata più volte la stessa quantità: in questo caso la variabile x può essere una
variabile qualsiasi, come ad esempio un numero progressivo).
In tal caso:
N
X
D2 = (yi
i=1
N
X 2
a0 )2 =
yi
i=1
2a0
N
X
i=1
yi + Na20
Derivando rispetto ad a0 , si ottiene che il minimo corrisponde al caso in cui a0 è
uguale alla media di yi .
Relazione lineare
Il caso in cui la funzione è una retta,
facilità:
D2
=
N
X
(yi
i=1
N
X
a0
f
=
a0 + a1 x, si risolve con altrettanta
a1 xi )2 =
N
X
yi2 + Na20 + a21 x2i
i=1
i=1
2a0
N
X
i=1
yi
2a1
N
X
i=1
yi xi + 2a0 a1
N
X
i=1
xi
Derivando, ed imponendo che la derivata valga zero, si ottengono dopo un po’ di
conti le due equazioni accoppiate:
PN
PN
Na
+
a
x
=
0
1
i
iP
=1 N
PN
PNi=1 yi
2
a0 i=1 xi + a1 i=1 xi = i=1 xi yi
che hanno come soluzione:
(1.2)
CAPITOLO 1. PROCEDURE DI FIT
8
a0 =
a1 =
(P
)(PP x ) (PP x y )(P x )
PN ( x y ) x ()P ( y )(xP) x )
N(
P x ) (P x )
N(
y
N
i=1 i
N
i=1
N
2
i=1 i
N
2
i=1 i
i i
N
i=1
2
i
N
N
i=1 i i
i=1
2
N
i
i=1
N
N
i=1 i
i=1 i
2
N
i=1 i
i
2
Il valore di a0 rappresenta l’intercetta della retta con l’asse delle ordinate, mentre
il valore di a1 rappresenta la sua pendenza.
E’ possibile a questo punto ottenere una stima dell’incertezza su y , osservando la
dispersione dei valori di y intorno al risultato del fit: basterà calcolare dapprima i
residui, e successivamente la loro deviazione standard.
Nel caso in cui i punti utilizzati siano pochi (diciamo meno di 10), è buona regola
calcolare l’errore su y tramite la formula1.1, che in questo caso si scrive:
y =
sP
N 2
i=1 di
2
N
infatti visto che nel calcolo dei residui abbiamo adoperato due valori ricavati dai
dati stessi, il numero di gradi di libertà è stato ridotto conseguentemente.
A questo punto, possiamo calcolare anche gli errori sui parametri del fit: per
farlo, basta osservare come sia a0 che a1 sono due funzioni delle variabili casuali
yi. Quindi bisogna solalmente applicare la formula di popagazione degli errori
ed effettuare dei conti che qui per brevità ometteremo riportando solamente il
risultato finale:
a20
a21
=
=
P
PN a0 2
( i=1 i )
2
i=1 yi y = y N (PN x2 ) (PN xi )2
i=1 i
i=1
PN a1 2
N
2
i=1 yi y = y N (PN x2 ) (PN xi )2
N
i=1
i
x2
i=1
Esiste una correlazione tra i due parametri: è una cosa che si impara immediatamente quando si effettua il fit grafico col righello. Infatti, nel caso semplice in
cui tutti i dai si trovino nel primo quadrante (valori di x e y positivi) che per far
passare il righello attraverso tutti i dati, se si aumenta l’inclinazione allora il punto
di intersezione con l’asse delle ascisse si abbassa, e viceversa. Quindi se il fit produce come risultato un valore di a1 maggiore di quello vero, allora il valore di a0
risulterà molto probabilmente minore di quello vero: tra i due parametri esisterà
allora una correlazione di tipo negativo.
2
Una forma alternativa della soluzione si può scrivere nella forma:
a0 =
a1 =
PNi yxi ax xyi
PNi xi x
=1 (
=1 (
1
)(
)2
y)
1.1. FIT COL METODO DEI MINIMI QUADRATI
9
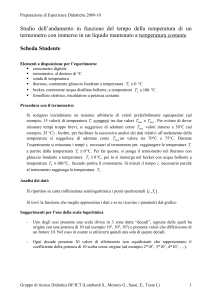
Figura 1.4: Correlazione tra pendenza ed intercetta: all’aumentare della pendenza diminuisce l’intercetta, e viceversa. La correlazione tra i due parametri
è quindi negativa (nel caso in cui i dati non giacciano tutti nel primo quadrante la
correlazione può essere tuttavia negativa o nulla).
20
18
16
14
12
10
8
6
4
2
0
0
2
4
6
8
10
12
CAPITOLO 1. PROCEDURE DI FIT
10
Per calcolare la correlazione si può procede nel modo seguente: si parte dall’idea
che una variazione yi in una delle misure produce nei parametri due variazioni
date da:
a0 = ay yi, a1 = ay yi. Se moltiplichiamo queste due espressioni tra di
0
1
i
i
loro, sommiamo su tutte le misure, e mediamo, otteniamo la covarianza dei due
parametri, che, assumendo che le misure yi siano tra di loro indipendenti, assume
la forma:
N
X
a0 a1 2
ov (a0 ; a1 ) =
= 2
i=1
yi yi
y
y
N
PN
PN
i=1 xi
P
2
i=1 xi
N
i=1 xi
2
ed infine il coefficente di correlazione risulta uguale a:
PN
x
r = q Pi=1 i
N Ni=1 x2i
Il coefficente di correlazione non dipende in nessun modo da y : dipende solo
dai valori di x. Questo ha come conseguenza interessante che per ottenere due
valori scorrelati della pendenza e dell’intercetta della retta basta fare delle misure
simmetriche intorno all’origine delle coordinate.
1.1.3.1 Esempi
Vediamo adesso alcuni esempi:
Esempio 1 Supponiamo che i valori “veri” delle grandezze
dalla relazione: y
x
=3 +1
x e y siano legati
Si effettuano 10 misure, con uno strumento che presenta una risoluzione pari a
y
:
=1
i 1 2
3
4
5
6
7
8
9
10
xi 1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0 9.0 10.0
yi 4.1 6.9 11.8 12.0 16.6 19.6 22.4 23.9 27.0 30.5
A partire da questi dati, possiamo calcolare:
1.1. FIT COL METODO DEI MINIMI QUADRATI
11
PN
PNi=1 x2i =
PNi=1 xi =
xi yi =
Pi=1
N
55
385
1198
i=1 yi = 174:8
e quindi, applicando le formule:
a0 = 1:71 a1 = 2:87
A questo punto è possibile calcolare i residuidi
= yi
a0
a1 xi :
i
1
2
3
4
5
6
7
8
9
10
di -0.48 -0.55 1.48 -1.19 0.54 0.67 0.60 -0.77 -0.54 0.09
Applicando la formula1.1, si ottiene come erroredati = 0:87, in ottimo accordo
col valore atteso.
Le incerte sui parametri si calcolano utilizzando le formule ??, ottenendo infine:
a0 = 1:71
0:68
a1 = 2:87 0:11
con un coefficente di correlazione pari a -0.9.
Esempio 2 Supponiamo adesso che anche nelle misure di x si effettui un errore
con dispersione pari a x
: . I risultati potrebbero apparire come i seguenti:
=05
i 1 2
3
4
5
6
7
8
9
10
xi 1.0 1.6 2.2 4.9 5.6 6.4 7.6 8.2 8.3 10.7
yi 4.1 6.9 11.8 12.0 16.6 19.6 22.4 23.9 27.0 30.5
Stavolta il risultato del fit è notevolmente diverso:
a0 = 2:59, a1 = 2:63
Calcolando l’errore su y si ottiene y
= 2:0, il doppio di quello vero!
Il motivo sta nel fatto che la dispersione su x viene “trasformata” in una indeterminazione su y : si ha pressappoco:
2 = 2 + ( dy )2 2
dati
y
x
dx
CAPITOLO 1. PROCEDURE DI FIT
12
Esempio 3 Stavolta i dati siano i seguenti:
i
1
2
3
4
5
6
7
8
9
10
11
xi 0.0 0.1 0.2 0.3 0.4
0.5
0.6
0.7
0.8
0.9
1.0
yi .001 .012 .015 .024 0.031 0.029 0.033 0.040 0.039 0.042 0.042
Le y sono state misurate con una incertezza pari a 2 10 3 .
Il fit lineare porta al risultato:a0 = 0:008 0:001, a1 = 0:039 0:002.
I residui sono:
i
di(10
1
2
3
4 5
6 7
8
9
10 11
-9
3 ) -8 -6 4 2 4 7 5 3 -1 -2
= 6 10
Il calcolo dell’errore in base ai residui porta al risultato: dati
3, ed il
2 vale 42 per 9 gradi di libertà. Anche stavolta l’incertezza calcolata sui dati è
più grande di quella attesa, ma stavolta la causa è l’inadeguatezza della funzione:
infatti, esaminando i residui, si nota come questi, invece di essere positivi o negativi in modo casuale, sembrano seguire un andamento che porta i punti a passare
da sotto a sopra e poi di nuovo sotto la retta ottenuta trmite il fit. Questo fa sorgere il forte sospetto che i dati presentino una leggera concavità rivolta verso l’alto.
E’ interessante osservare come questo comportamento non risulta particolarmente
vistoso nel grafico che confronta i dati col fit, mentre è evidentissimo nel grafico
dei residui (fig.1.5).
1.1.4 Metodo matriciale
Un metodo alternativo di risolvere le equazioni 1.2 è quello di adoperare il metodo
matriciale. Data una opportuna trasformazione si possono infatti scrivere nella
forma:
A=
a0 ; M
a1
=
PN
xi
+
P P x2i ; V
xi
P = P yi
xi yi
= MA
+
A = M 1V
V
Quindi per trovare i parametri occorre invertire la matrice M : i vantaggi di
questo metodo stanno nel fato che la matrice è invertibile numericamente, ed il
formalismo si può estendere a casi più complicati, come vedremo nel prossimo
paragrafo.
1.1. FIT COL METODO DEI MINIMI QUADRATI
13
Figura 1.5: Terzo esempio: grafico dei dati (in alto) sovrapposto al risultato del
fit, e grafico dei residui. Si vede chiaramente come i dati presentino una leggera
curva che li fa passare da sotto a sopra e poi nuovamente sotto la retta del fit.
0.06
0.05
0.04
0.03
0.02
0.01
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.015
0.01
0.005
0
−0.005
−0.01
−0.015
CAPITOLO 1. PROCEDURE DI FIT
14
=
La matrice S
y2 M 1 è detta matrice di covarianza: si dimostra come i suoi
elementi siano:S00 a20 , S11 a21 , S01 S10 r a0 a1
=
=
=
=
1.1.5 Polinomio di grado generico
Un fit dei dati mediante un polinomio generico di grado M è sempre possibile,
purché il numero dei punti sperimentali sia almeno uguale al grado del polinomio
più due: infatti sappiamo che per N punti passa sempre uno ed un solo polinomio
di grado N-1. Quindi, se tentiamo il fit il queste condizioni, il polinomio passerà
esattamente per i punti sperimentali: i residui saranno tutti esattamente uguali a
zero, ed il polinomio trovato sarà il polinomio interpolante. Questo caso risulta
poco interessante nel caso di dati affetti da errore: la forza del fit infatti sta nel
ricavare pochi parametri sperimentali da molte misure, in modo tale che la ridondanza consenta di ridurre le incertezze sui singoli punti. Qualora il numero di
dati sperimentali risulti inferiore al grado del polinomio aumentato di 1, allora il
polinomio rimane indeterminato, ed il fit è impossibile.
Il metodo è simile a quello visto nel caso dell a retta: il polinomio avrà la forma:
p(x) = a0 + a1 x + a2 x2 + ::::: + aM xM
= PMk=0 ak xk
e quindi la funzione da minimizzare sarà:
D2 =
PN
i=1 (yi
p(xi ))2 =
PN PM
k
k=0 ak xi
i=1 yi
2
Derivando, e svolgendo i calcoli, si ottiene un’equazione in forma matriciale,
esattamente come nel caso della retta:
A = MV con: Ak = ak , Mlk =
PN
k+l
i=1 xi , Vl
= PNi=1 yixll
Per calcolare l’inverso della matrice M esistono metodi numerici molto efficaci,
per cui il problema risulta facilmente automatizzabile in tutti i casi di applicazione
pratica.
Gli errori sui parametri e i coefficenti di correlazione si calcolano a partire dagli
elementi della matrice di covarianza S y2 M 1 :
ak
= pSkk , rkl = S kl
ak al
=
.
1.1.6 Problemi con i fit polinomiali
I fit effettuati con un polinomio risultano molto comodi per la facilità con cui vengono effettuati: basta calcolare il vetore V , la matrice M , invertire quest’ultima
e moltiplicarla per V , tutte operazioni molto semplici per un calcolatore; inoltre,
1.1. FIT COL METODO DEI MINIMI QUADRATI
15
nel caso in cui la legge fisica che lega le quantità x e y risulti sconosciuta costituiscono sempre una buona approssimazione ai dati in un piccolo intervallo. Però i
polinomi non sono quasi mai in grado di riprodurre alcune caratteristiche comuni
a molte leggi fisiche, come la presenza di un asintoto o una rapida discesa verso
lo zero. Si potrebbe pensare che, a causa del teorema di Taylor, un polinomio di
grado sufficentemente alto dovrebbe costituire sempre una migliore approssimazione alla legge sperimentale ignota. Purtroppo non è così: a causa degli errori
sperimentali, i polinomi di grado eccessivamente elevato hanno la tendenza a diventare instabili, e a presentare caratteristiche, come massimi o punti di flesso,
assenti nei dati. Ad esempio, in figura 1.6 viene mostrato come aumentando il
grado del polinomio la curva risultante tende sempre più a distanziarsi dai dati.
Nella pratica, è raro che un polinomio di grado superiore al secondo si riveli utile.
Però spesso è possibile riuscire applicare ai dati delle trasformazioni in modo da
ottenere delle leggi polinomiali.
=
= ( )
=
= ()
Un caso molto frequente è quello dell’esponenziale descrescente:y Ae kx . Infatti, adoperando una nuova variabile z log y la legge diventa z log A kx.
Un’altro caso frequente è quello della legge esponenziale del tipo y
x : in
questo caso bisogna trasformare entrambe le variabili, prendendo log x ,
log y . La relazione diviene infatti: log .
= ()
= ()
= ( )+
L’unico problema, nell’adoperare questa tecnica, è che raramente dopo la trasformazione le incertezze sulle variabili rimangono uguali, o almeno comparabili:
quindi piuttosto che adoperare il metodo dei minimi quadrati conviene applicare
quello del minimo 2 , che verrà discusso nel prossimo capitolo.
1.1.7 Relazione di proporzionalità
Un caso interessante si ha quando si ipotizza tra x ed y una relazione di proporzionalità.
In questo caso, la funzione da minimizzare assume la forma:
N
X
D2 = (yi
i=1
Axi )2
Derivando rispetto ad A, ed eguagliando a zero il risultato, si ottiene:
A=
con errore dato da:
PN
yixi
Pi=1
N 2
i=1 xi
CAPITOLO 1. PROCEDURE DI FIT
16
Figura 1.6: Esempio di problemi nell’uso dei fit polinomiali: la relazione ”vera”
tra le variabili x ed y è una salita esponenziale verso un valore a regime (linea nera). Come vediamo, nessun polinomio è in grado di riprodurre il comportamento
asintotico, e all’aumento del grado si nota anzi una tendenza verso l’instabilità.
2
1.8
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
1.2. FIT LINEARI TRAMITE IL METODO DEL MINIMO 2
17
A = qP y
N 2
i=1 xi
è facile verificare come i valori grandi di xi influenzino maggiormente il risultato.
1.2 Fit lineari tramite il metodo del minimo 2
1.2.1 Richiamo del metodo del minimo 2
Si supponga di avere effettuato una serie di misure yi in corrispondenza di N punti
xi . Ad ogni misura viene associata una incertezza i , mentre i valori di xi vengono
considerati esatti.
= ( )
Supponiamo che la quantità y dipenda da x tramite la relazione: y f x; a . Il
metodo del minimo 2 consiste nel determinare i parametri incogniti minimizzando la funzione :
X (yi
2 (a) =
i=1;N
f (x1 ; a))2
i2
Detto in parole povere: il 2 misura, in unità di deviazioni standard, quanto dista
il valore misurato yi dal valore previsto dal modello: se il punto coincide con
la previsione, il contributo sarà zero. Se invece dista una deviazione standard,
allora sarà 1; se dista due deviazioni standard il contributo sarà 4, e così via. Il
2 differisce dalla somma degli scarti quadratici in quanto stavolta le misure con
errore maggiore contribuiscono meno alla somma, con una minore influenza sul
risultato finale.
Per trovare il valore dei parametri che minimizzano il 2 èpossibile procedere
per via analitica (calcolando cioè le derivate esplicitamente) o per via numerica
(calcolando la funzione per vari valori dei parametri e scegliendo quelli per cui si
ottiene il valore minimo).
In genere, la via analitica è preferibile, ma sono pochissimi i casi in cui risulta
praticabile. La via numerica invece funziona in quasi tutti i casi, ma può risultare
eccessivamente lenta e macchinosa.
CAPITOLO 1. PROCEDURE DI FIT
18
1.2.1.1 Primo caso: costante.
Il caso banale corrisponde a quello per cui f è una costante. In questo caso il 2
assume la forma:
2 =
X (yi
i=1;N
a0 )2
i2
Derivando rispetto ad a0 , si ottiene:
2
a0
=2
X (yi
2
a0 )
i
i=1;N
da cui, infine:
a0 =
P
y = 2
P i 2i
1=i
Per calcolare l’errore su a0 , si utilizza la formula della propagazione degli errori:
2
a0
=
X a0 2
j =1;N
yj
j
=
X
j
1
=j2 2 2
1
P 2 j = P 2
1=i
1=i
Queste formule sono quelle che definiscono la media pesata di una serie di misure,
che così trova una giustificazione teorica. 3
1.2.1.2 Secondo caso: relazione lineare.
Supponiamo stavolta una relazione del tipo: y
Il 2 assume la forma:
2 =
X (yi
i=1;N
= a0 + a1 x.
a0 a1 xi )
i2
Derivando, si ha:
3
Un modo alternativo di ottenere queste formule quello di supporre che le misure siano distribuite secondo una distribuzione gaussiana, e di cercare il valore pi\‘u probabile del valore centrale
della distribuzione.
1.2. FIT LINEARI TRAMITE IL METODO DEL MINIMO 2
2
a0
2
a1
19
P
= 2PP yi=i2 2a0 P
1
=i2 2a1 xi =i2 = 0
= 2 xiyi=i2 2a0 P xi=i2 2a1 P x2i =i2 = 0
è possibile esprimere l’equazione precedente in forma matriciale:
A=
a0 ; M
a1
P 2 P
2 1
=
x
=
i
i
i
= P 2 P 2 2 ; V
xi =i
+
= MA
+
A = M 1V
xi =i
V
P
2 y
=
i
i
= P
2
xi yi=i
(1.3)
La matrice M e il vettore V sono facilmente calcolabili a partire dai dati; allo stesso modo, l’inversione numerica della matrice M non presenta in genere particolari
difficoltà, per cui il problema si può considerare risolto.
=
La matrice S M 1 assume un particolare significato: è possibile infatti dimostrare (tramite un conto che si trova nei testi specializzati e che qui non riproduciamo) che si tratta della matrice di covarianza, i cui elementi diagonali, come
abbiamo visto, sono uguali ai quadrati delle incertezze sui alori dei parametri:
Skk = a2k
L’elemento non diagonale è invece uguale alla covarianza dei parametri, ovvero
al loro coefficente di correlazione, moltiplicato per i rispettivi errori:
Sjk = aj ak rjk
Ricapitolando, il fit di un insieme di parametri tramite una retta col metodo dei
minimi quadrati richiede la costruzione di un vettore di dimensione 2, di una matrice , la sua inversione, e la moltiplicazione per il vettore precedentemente calcolato. Le incertezze sui parametri e i coefficenti di correlazione risultano
automaticamente dal calcolo dell’inverso della matrice.
2 2
1.2.1.3 Terzo caso: relazione di proporzionalità.
Si supponga una relazione del tipo:
y = a1 x.
CAPITOLO 1. PROCEDURE DI FIT
20
La funzione 2 diventa:
2 =
X (yi
a1 xi )
2
i
i=1;N
In questo caso, la derivata si calcola immediatamente:
2
a1
=2
X xi yi
i=1;N
i2
2a1
X x2i
2
i=1;N i
e quindi:
a1 =
P
x y = 2
P i 2 i 2i
(1.4)
xi =i
Infine, gli errori sulla quantità a1 si possono calcolare utilizzando la formula per
la propagazione degli errori:
2
a1
=
N X
a1 2
yj
j =1
j
2
N X
x
1
j =j
P 2 2 =P 2 2
=
xi =i
xi =i
j =i
(1.5)
1.2.2 Applicazioni: La legge di Malus.
Si consideri la serie di dati riportata in tabella 1.1 e mostrata in figura1.7.
Si tratta di un insieme di dati che rappresenta la quantità di luce laser che attraversa
un filtro polaroid in funzione dell’angolo di inclinazione. Gli angoli sono calcolati
a partire dal minimo dell’intensità; le intensità sono misurate in Volts, in quanto
lo strumento di misura non era calibrato. Le incertezze sono uguali a 0.1 Volts per
tutte le misure.
In queste condizioni, nell’ipotesi di luce laser completamente polarizzata, il grafico segue pressappoco la legge di Malus, che con questa scelta dell’origine delle
coordinate assume la forma: I I0 2 .
= sin
Per verificare la validità della legge, è possibile innanzitutto effettuare un cam2 : in questo modo, la
biamento di variabile, passando alla variabile x
legge di Malus diventa una semplice relazione di proporzionalità: I
I 0 x, e
quindi è possibile adoperare la formula 1.4. In questo modo si ottiene : I0
: : V olts. Il 2 del fit risulta di 331 per 36-1=35 gradi di libertà: come si
vede, il modello non sembra descrivere i dati in modo sufficentemente accurato.
= sin
18 01 0 03
=
=
1.2. FIT LINEARI TRAMITE IL METODO DEL MINIMO 2
Tabella 1.1: Dati raccolti nell’esperienza di verifica della legge di Malus
V
V
Æ
Æ
0
0.20.1 180
0.20.1
Æ
Æ
10
0.70.1 190
0.70.1
20Æ
2.10.1 200Æ 2.10.1
30Æ
4.40.1 210Æ 4.40.1
40Æ
7.30.1 220Æ 7.30.1
Æ
50
10.40.1 230Æ 10.00.1
60Æ 13.40.1 240Æ 12.90.1
70Æ 15.30.1 250Æ 15.60.1
80Æ 17.40.1 260Æ 17.40.1
90Æ 18.00.1 270Æ 18.10.1
100Æ 17.50.1 280Æ 17.60.1
110Æ 15.70.1 290Æ 16.20.1
120Æ 14.00.1 300Æ 13.80.1
130Æ 11.10.1 310Æ 10.80.1
140Æ 8.00.1 320Æ 7.90.1
150Æ 5.00.1 330Æ 4.60.1
160Æ 2.50.1 340Æ 2.30.1
170Æ 0.80.1 350Æ 0.80.1
21
CAPITOLO 1. PROCEDURE DI FIT
22
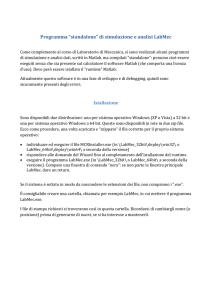
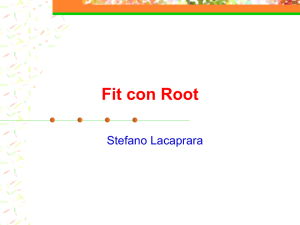
Figura 1.7: In alto: luce laser che attraversa un polarimetro in funzione dell’angolo di inclinazione dell’asse principale. Gli angoli sono misurati in gradi a partire
dalla direzione in cui la lettura del sensore presenta un minimo. La scala verticale
è misurata in Volts.
2 : si vede chiaramente
Al centro: gli stessi dati, ma riportati in funzione di
come questi di dispongano intorno ad una retta.
In basso: residui ottenuti effettuando un semplice fit di proporzionalità tra
l’intensità e il quadrato del seno dell’angolo.
sin
20
15
10
5
0
0
50
100
150
200
250
300
350
20
15
10
5
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1
0.5
0
−0.5
−1
0
50
100
150
200
250
300
350
1.2. FIT LINEARI TRAMITE IL METODO DEL MINIMO 2
23
Figura 1.8: In alto: risultato del secondo fit sovrapposto ai dati. In basso, grafico
dei residui
20
15
10
5
0
0
50
100
150
200
250
300
350
0
50
100
150
200
250
300
350
0.6
0.4
0.2
0
−0.2
−0.4
−0.6
−0.8
Un primo possibile problema è individuabile già esaminando la tabella dei dati:
infatti si nota immediatamente come la luminosità letta dallo strumento non si
azzera mai, mentre il modello proposto prevede che nessuna luce attraversi il poÆ . Una causa di questo comportamento può ad
laroid per inclinazioni di Æ e
esempio essere individuata nella non completa polarizzazione della luce del laser.
Un modello più accurato risulta allora: I I? I0 x, dove I? rappresenta la componente della luce laser polarizzata perpendicolarmente all’asse di polarizzazione
principale.
0 180
= +
=
A questo punto è possibile applicare la formula1.3, che dà come risultato I0
: : V; I?
: : V . Il 2 di questo fit è uguale a 283, mentre
il numero di gradi di libertà è passato da 35 a 34; notiamo inoltre come l’errore
statistico su I0 sia aumentato.
17 74 0 05
= 0 20 0 03
E’ possibile tuttavia migliorare ulteriormente il fit: osserviamo infatti come gli
angoli siano stati misurati a partire dal punto di minimo della luminosità, la cui
determinazione porta sempre con sé un errore, che si può ripercuotere negativa-
CAPITOLO 1. PROCEDURE DI FIT
24
mente sul fit: ingrandendo la figura 1.8 si potrebbe infatti osservare che i dati
risultano leggermente spostati verso destra rispetto al risultato del fit.
Conviene allora provare ad introdurre un nuovo parametro, corrispondente ad un
piccolo errore comune a tutti i dati nella determinazione degli angoli.
Stavolta il modello da utilizzare nel fit sarà:
I = I? + I0 sin2 (
)
Apparantemente, questa funzione risulta non lineare. Tuttavia è semplicemente
linearizzabile con una serie di passaggi: la prima operazione da effettuare è quella
di sfruttare le formule di bisezione degli angoli, in modo da ottenere:
I I
I = I? + 0 + 0 os(2
2
2)
2
Si possono inoltre applicare le formule di prostaferesi:
I I
I = I? + 0 + 0 os(2) os(2)
I0
2 sin(2) sin(2)
A questo punto, posto = I? + I2 , = I2 os(2), = I2 sin(2), ed inoltre
s = sin(2), = os(2), la funzione assume la forma semplice:
2
2
0
0
0
I = + + s
che è lineare, ma dipende da due variabili, e quindi non rientra nei casi esaminati
in precedenza.
Tuttavia, come vedremo, i conti risultano particolarmente semplici.
Il 2 , tenendo conto che gli errori sono uguali per tutte le misure, assume la forma:
X
2 =
i
(Ii
!
si
i )2 =I2
da cui, derivando rispetto ad , , , si ottiene:
2
2
2
=
=
=
2 (P Ii
i
I2
22 (P Ii si
i
I
22 (P Ii i
I
i
P
P
N si i )
P
P
P
si s2i si i )
P
P
P
i i si 2i )
=0
=0
=0
1.2. FIT LINEARI TRAMITE IL METODO DEL MINIMO 2
25
Una ulteriore ed importante semplificazione si ha osservando che, avendo effettuato le misure ad angoli equispaziati
tra di loro
P
P
P nell’intervallo ; , si ha (in
questo caso particolarissimo) i i
s
, e quindi:
i i
i i si
=
=
=0
[0 2 ℄
P
= P i Ii =N
P
= Pi Ii si = P s2i
=
2i
i Ii i =
Applicando la propagazione degli errori si trova inoltre:
2 = I2P
=N
2 = I2 = P s2i
2 = I2 = 2i
Queste formule, calcolate sui dati che stiamo analizzando, portano al risultato:
= 9:07 0:02;
= 0:33 0:02;
tornati ai parametri fisici, si trova:
= 8:8710 0:0236Una volta
p
I0 = 2 2 + 2 = 17:75 0:02, I? = I20 = 0:20 0:02, = 21 artan 0:019 0:002
Il valore del 2 scende bruscamente a 87, per 33 gradi di libertà.
=
Possiamo adesso porci la domanda: è stata una decisione saggia introdurre un
nuovo parametro nel fit? Dobbiamo tenere conto infatti del fatto che l’introduzione di nuovi parametri porta sempre, ovviamente, ad un migliore adattamento
ai dati, e ad un conseguente abbassamento del valore del 2 . Ovviamente c’è un
prezzo per questo, ed è l’aumento dell’incertezza sul valore dei parametri. Non ha
quindi senso continuare indefinitvamente ad introdurre parametri fino ad ottenere
una coincidenza perfetta con i dati.
Tipicamente, l’introduzione di un nuovo parametro è giustificata quando il valore del parametro stimato tramite fit risulta significativamente diverso da zero. In
quest’ultimo caso, spesso accade che il valore del 2 del fit diminuisce significativamente, e gli altri parametri subiscono delle variazioni più grandi dell’errore
statistico stimato.
Bisognerebbe evitare però di introdurre un nuovo parametro se questo non possiede un chiaro significato fisico. Spesso inoltre conviene verificare tramite un
controllo indipendente che effettivamente l’introduzione del nuovo parametro è
necessaria: ad esempio, nel caso della quantità I? , si può verificare come a laser
spento la lettura del fotometro è esattamente zero, mentre ruotando il polarimetro
a laser acceso la lettura non si azzera mai: quindi evidentemente una piccola parte
CAPITOLO 1. PROCEDURE DI FIT
26
Figura 1.9: In alto: grafico del terzo fit descritto nel testo sovrapposto ai dati. In
basso: grafico dei residui
20
15
10
5
0
0
50
100
150
200
250
300
350
0
50
100
150
200
250
300
350
1
0.5
0
−0.5
−1
1.2. FIT LINEARI TRAMITE IL METODO DEL MINIMO 2
27
della luce laser riesce ad attraversare comunque il polarimetro, non sappiamo bene se per effetto di una non completa polarizzazione del laser o di un difetto del
filtro.
Per quanto riguarda invece l’angolo , possiamo osservare come l’incertezza nella
determinazione del minimo nella procedura di allineamento che ha preceduto le
misure risultava dell’ordine di qualche grado, e pertanto compatibile col valore di
trovato.
A questo punto, l’introduzione di nuovi parametri risulta ingiustificata. Possiamo però chiederci come mai il valore del 2 risulti così alto, e se è ragionevole.
Possiamo osservare il grafico dei residui: una cosa in particolare colpisce, ed è
notare come alcuni punti risultano chiaramente sbagliati, e registrano una luminosità chiaramente più bassa degli altri. Questi punti sono molto probabilmente
dovuti a macchie o imperfezioni del polarimetro. Per migliorare la misura, due
strade sono possibile: la prima è quella di pulire accuratamente il filtro e di ripetere possibilmente tutte le misure da capo. Se abbiamo nuovamente accesso allo
strumento, questa è chiaramente la strada migliore. Se invece non possiamo ripetere le misure, allora possiamo decidere di eliminare le misure che presentano un
residuo più alto in valore assoluto, e ripetere il fit. Ad esempio, eliminando le 4
misure peggiori4, si ottiene un fit con un 2 di 32 per 29 gradi di libertà, che mostra
come il modello alla fine sia abbastanza accurato. Ovviamente, diminuendo i dati
adoperati, l’errore statistico sul risultato aumenterà.
4
Notiamo che molte delle semplificazioni effettuate in precedenza vengono a cadere, ed è
quindi necessario rifare alcuni conti.