Trasformata di Laplace
ESEMPI DI MODELLIZZAZIONE
Introduzione
La trasformata di Laplace si utilizza nel momento in
cui è stata individuata la funzione di trasferimento
La F.d.T è una equazione differenziale nel tempo
abbastanza difficile
Si ricorre alla trasformata di Laplace per passare dal
dominio del tempo al dominio delle frequenze s
Il dominio s non è nel campo reale ma nel campo
complesso s=α+jω
Procedimento
Per conoscere una F.d.t. nel dominio t si procede
secondo i seguenti punti:
1. Si trasformano le variabili di ingresso dal dominio t
al dominio s
2. Si trasformano le relazioni ingresso-uscita nel
dominio s
3. Si determina la funzione di uscita in s
4. Si antitrasforma la funzione di uscita dal dominio s
al dominio t
Risposta dei sistemi continui nel dominio del
tempo
La risposta di un sistema nel dominio del tempo a
un segnale dipende sia dalla funzione di
trasferimento che dal segnale stesso
In genere, l’analisi di un sistema si fa analizzando la
risposta a un gradino unitario come segnale di input
1 per t > t0
=
u (t ) grad
=
(t )
0 per t < t 0
Come si vedrà in seguito
1
grad (t ) =
s
Sistema di ordine zero
È un sistema senza memoria; è rappresentato da una funzione di
trasferimento puramente algebrica anche nel dominio del tempo
È una rete puramente resistiva
La funzione di trasferimento è una costante
Y (s)
= k
U (s)
g (t ) = k
=
G
(s)
Se il segnale di ingresso è un gradino unitario, la risposta sarà:
1
s
k
Y (s) =
s
U (s) =
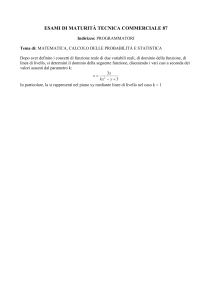
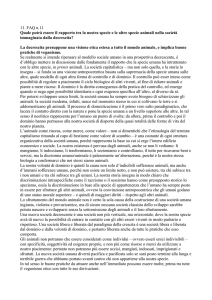
Come esempio si riporta un partitore di tensione
Risposta ad un gradino unitario
Vin=grad(t)
R1
R2
Vout
Vin=grad(t)
t0
t
Vout=grad(t)
Vout
R2
=
Vin
R1 + R2
t0
t
Sistema del primo ordine
Il sistema è del primo ordine se in esso è presente un solo
componente in grado di immagazzinare energia o materia
o informazione
Nel dominio del tempo, il sistema è descritto da una
equazione differenziale del primo ordine
La funzione di trasferimento
G
=
(s)
Y (s)
k
=
U (s) s + a
Y (s) =
La risposta al gradino unitario
Nel dominio del tempo
t
−
k
y=
(t )
(1 − e τ )
a
k
s( s + a)
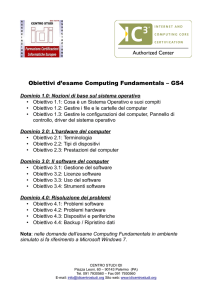
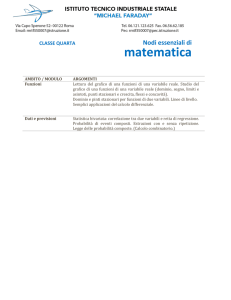
Esempio di un sistema elettrico del primo ordine
v=
vr + vc
i
V2
0/5V
R1
1k
i=
C1
0.1uF
1MHz
Se si prende l’uscita
su C conviene fare
queste
queste sostituzioni
Se l’ingresso è un gradino k/s
∆Q
∆t
Q = CVc ⇒ Ri = RC
∆Q
∆t
∆vc
τ=RC costante di
+ vc ( t )
∆t
tempo
∆
v
c
+ vc ( t ) =vi ( s ) =τ svc ( s ) + vs ( s )
L vi ( t ) =RC
∆t
vo ( s )
1
= G ( s=
vc ( s )(τ s + 1)= vi ( s ) ⇒ f .d .t=.
)
vi ( s )
1+τ s
=
vi ( t ) RC
vc ( s ) =
k
s (τ s + 1)
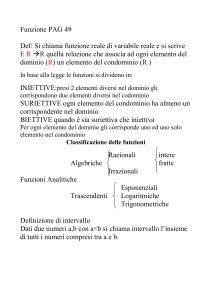
Esempio di un sistema del primo ordine
V2
0/5V
R1
1k
C1
0.1uF
vout = Ri
1MHz
vi = Ri + Vc = Ri +
Se si prende l’uscita su R
conviene fare queste
queste sostituzioni
È complesso calcolare laf.d.t
Anche in questo caso si fa la trasformata
di Laplace
→
vout
sC
=
vi 1 + sRC
∆Q
1
= Ri + ∫ idt
C ∆t
C
1
v=
Ri ( s ) +
i
i (s)
sC
vout
1 vout
i = → vi ( s ) =vout +
R
sC R
Risposta ad un gradino unitario
Sistemi di secondo ordine
Si definisce sistema di secondo ordine, quel sistema
con due costanti di tempo
Un esempio molto semplice è un circuito RLC
Anche in questo caso, si analizza il sistema tramite
un ingresso a gradino
Anche in questo caso si può scrivere:
Vi(t)=Vr+Vc+Vl
Si analizza il sistema direttamente nel dominio delle
frequenze
vi ( s ) = vR + vL + vc
1
vi ( s ) =Ri + sLi +
sC
Sistema del II ordine
R1
Vi(s)
Supponiamo di voler prendere
l’uscita sul condensatore
C1
L1
1
Vc
1
sC
= =
=
Vi R + 1 + sL s 2 LC + sRC + 1
sC
1
=
R
1
LC s 2 + s +
L
LC
Se si fanno le seguenti posizioni:
La funzione di trasferimento diventa:
ωn2
G (s) = 2
s + 2 sξωn + ωn2
1
LC
R
2ζωn =
L
ωn =
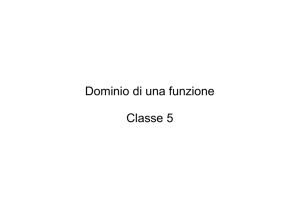
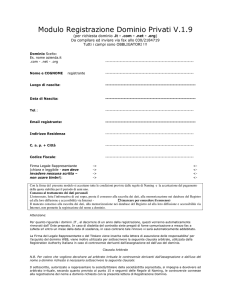
Risposta al gradino
Risposta al gradino di un sistema del secondo ordine
Tp
Td = tempo di ritardo
tempo per raggiungere
il 50% del segnale
Ts = tempo di salita
tempo per raggiungere
il 90% del segnale
Ta = tempo di assestamento
S = sovraelongazione
massima
−πξ
S % = 100e
Tp =
1−ξ 2
π
ωn 1 − ξ 2
Proprietà e trasformazioni
Dominio nel tempo
f(t)
a f(t)
δ(t) (impulse)
a (step)
at (ramp)
tn
sin(ωt)
cos(ωt)
e (–at)
Dominio di Laplace
F(s)
a F(s)
1
a/s
a/s2
s n!/(n+1)
ω/(ω2+s2)
s/(ω2+s2)
1/ (s+a)
t n −1e − at
(n − 1)!
Teorema del
valore iniziale
Teorema della
traslazione
d f(t)/d t
d2(t)/dt2
ω/s2-ω2
s/(s2-ω2)
lim f=
(t ) lim s ⋅ F ( s )
t →∞
s →0
Dominio di Laplace
s F(s)-f(0)
s 2 F ( s ) − sF (0) −
t
∫ f (t )dt
1
( s + a )n
sin h (ωt)
cos h(ωt)
Teorema del
valor finale
Dominio nel
tempo
F(s)/s
0
e
− at
cos(ωt )
e − at sin (ωt )
(s + a)
2
(s + a) + ω2
ω
2
(s + a) + ω2
lim f (t ) = lim sF ( s )
t → 0+
s →∞
L f ( t − T ) =
e −Ts F ( s )
F(t-θ)
e-θsF(s)
df (t )
dt
t =0
Semplice esempio
Qin portata in ingresso
h
Qout
Portata in
uscita
d
Schema equivalente
Qin
CL
RL
Qs
Qout
Qs=QoutQin
Semplice esempio
La relazione ingresso-uscita
nel dominio del tempo
∆h
τ
τ
+ h = Qin
∆t
A
τ è l costante di
tempo, A l’area
del serbatoio
(vedi file
rappresentazione
)
Nel dominio delle
frequenze
Qinτ
τ sH ( s ) + H ( s ) =
As
Derivata
prima di una
variabile
Costante
nel tempo
τ
antitrasformat
a
Qin A
H (s) =
s 1 + sτ
−t
Qinτ
=
(1 − e τ )
h(t )
A
Semplice esempio
Il sistema è prettamente
Meccanico. Esso è formato da
una massa M, una molla
di costante elastica K e uno
uno smorzatore di costante b
Se il sistema è sollecitato da una forza F, può essere descritto dalla seguente
equazione
.
..
F − kx − b x =
mx
Se si fa un’analogia con un sistema elettrico allora: F=v, k=1/C, M=L, b=R
In conclusione…
Le componenti circuitali
nel dominio del tempo e
delle frequenze
Dominio
del
tempo
R
C
L
Dominio
delle
frequenze
R
1/sC
sL
Funzioni di trasferimento di uso più comune
1 ⇔ δ (t )
1
⇔1
s
k
⇔k
s
1
⇔t
2
s
k
⇔ kt
2
s
1
⇔ e− at
s+a
k
⇔ ke− at
s+a
1
1
⇔ (1 − eat )
s( s + a) a
k
k
⇔ (1 − eat )
s( s + a) a
−τt
1
⇔ 1 − e
s(1 + τ s)
−τt
k
⇔ k 1 − e
s(1 + τ s)
t
t
1
1 τ − τ1 τ − τ 2
(1 + τ s) ⇔
1 − e − 1 − e
(1 + τ1s)(1 + τ 2 s)
τ1 − τ 2 τ1 τ 2