2. Meccanica
1
2.1 Cinematica
2
Traiettoria e Legge oraria
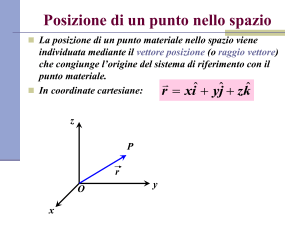
Il moto di un corpo
Un corpo è in movimento quando la sua posizione rispetto ad altri corpi,
considerati fissi, varia nel tempo. Da questa definizione scaturisce l’esigenza di
introdurre un sistema di riferimento per individuare la posizione di un corpo. La
condizione più generale è che il moto avvenga nelle tre dimensioni dello spazio.
zP
z
r: Vettore posizione
r
xP
x
O
P
yP
y
(xP,yP,zP ): Coordinate del punto nel sistema di
riferimento (xyz): si ottengono proiettando il
vettore r lungo le direzioni degli assi di
riferimento
3
In casi più semplici, quando il moto avviene in due dimensioni è sufficiente
introdurre un sistema di riferimento bidimensionale
y
r: Vettore posizione
P
yP
r
O
xP
(xP,yP): Coordinate del punto nel sistema di
riferimento (xy): si ottengono proiettando il
vettore r lungo le direzioni degli assi di
riferimento
x
4
Si definisce traiettoria del moto la curva descritta da un corpo durante il
suo moto. Per semplicità, ma senza perdere in generalità, ci restringiamo al
caso in cui il corpo sia un punto materiale P
P
P: generica posizione del punto materiale lungo la traiettoria
Nel caso in cui la traiettoria sia nota, per descrivere completamente il moto
del corpo è sufficiente conoscere la posizione occupata in ogni istante. Se si
indica con s il tratto di traiettoria percorsa al tempo t, il moto del corpo è
completamente noto quando si conosca la relazione tra s e t. Questa
relazione, s=s(t), prende il nome di LEGGE ORARIA.
5
La posizione del corpo viene definita, come già detto, in un sistema di riferimento
y
S (t1)
O
P1
P2
S (t2)
x
Se P1 e P2 sono le posizioni del corpo lungo la traiettoria al tempo t1 e t2
rispettivamente e i relativi spostamenti si ndicano come s(t1) e s(t2), si definisce
una quantità scalare che viene definità VELOCITA’ SCALARE MEDIA
s(t2 ) − s(t1 ) Δs
v =
=
t2 − t1
Δt
6
Se assumiamo che l’intervallo di tempo considerato, Δt=t2-t1, tenda a zero
possiamo definire la velocità istantanea. La velocità istantanea è una grandezza
vettoriale la cui direzione è sempre tangente alla traiettoria nel punto
considerato.
y
V(P1)
S (t1)
P1
O
Δs
v P = lim
Δt
Δt →0
1
P2
S (t2)
x
Velocità istantanea
7
Rovesciamo il punto di vista:
Costruzione della traiettoria dai vettori
velocità
y
P0
.
P.1
. P2
v sempre tangente
alla traiettoria
O
x8
Velocità: dimensioni e unità di misura
vist
Δs
= lim
Δt
Δt→0
Dimensioni Fisiche [v] = [L][T-1]
Unità di misura: [SI] m/s
[CGS] cm/s
Fattore di ragguaglio: 1 m/s = 100 cm/s
1 km/h=1000m/3600 s=0.28 m/s
9
Alcune velocità caratteristiche
m/s
10
9
10
_
6_
10
3_
1_
10
Luce nel vuoto (3.108 m/s)
Suono nell’aria (330 m/s)
Impulso nervoso (25m/s)
Sangue nell’aorta 0,35 m/s
-3 _
10
Accelerazione
Se la velocità istantanea varia nel tempo, è possibile definire l’accelerazione media
y
v (t1)
P1
O
v(t2)
P2
x
v(t2 ) − v(t1 ) Δv
a =
=
t2 − t1
Δt
11
Se assumiamo che l’intervallo di tempo considerato, Δt=t2-t1, tenda a zero
possiamo definire la accelerazione istantanea. v(t2 ) − v (t1 )
aP1 = lim
Δt
Δt→0
Per costruire il vettore a è necessario fare la differenza tra i vettori velocità al
tempo t2 e il vettore velocità al tempo t1. Di seguito viene mostrata la costruzione
vettoriale.
y
v (t1)
v (t1)
P1
O
P2
- v (t1)
v(t2)
a
x
12
L’accelerazione istantanea è una grandezza vettoriale ma la sua direzione, a
differenza della velocità istantanea, non è sempre tangente alla traiettoria.
Per questo è in genere individuato da una componente tangente alla
traiettoria e da una componente normale alla traiettoria
n: direzione normale alla traiettoria ne punto P
y
at
an
O
t: direzione tangente alla traiettoria nel punto P
a
x
at: accelerazione tangenziale
an: accelerazione normale
13
Accelerazione: dimensioni e unità di
misura
a =
v2 − v1 Δv
=
t2 − t1 Δt
Dimensioni [a] = [L][T-2]
Unità di misura: [SI] m/s2
[CGS] cm/s2
Fattore di ragguaglio:
1 m/s2 = 100 cm/s2
Accelerazione di gravità: g≈ 9.8 m/s2
14
Moto Rettilineo e uniforme
Un corpo si muove di moto rettilieno e uniforme quando la traiettoria è
rettilinea e vengono percorsi spazi uguali in tempi uguali: Ne segue che la
velocità istantanea è sempre costante in modulo direzione e verso.
s2 − s1 = v0 ⋅ (t2 − t1 )
v0 = tanα
v = v0 = cost
s
s2
v
v0
a
s1
t1
t2
t
t1
t2
t
15
Esempio: Un’automobile viaggia alla velocità costante di
130 km/h. Il guidatore distoglie lo sguardo dalla strada
per 2 s per sincronizzare una stazione sull’autoradio.
Quanto spazio percorre l’automobile in questo intervallo
di tempo?
Soluzione
Δ s = vΔt
(
)( )
Δ s = 130 ÷ 3,6 ms −1 × 2 s = 72 m.
16
Velocità media
Supponiamo che un’automobile durante un viaggio di 60
km, viaggi a 20 km/h per i primi 30 km e a 60 km/h per
gli altri 30 km. Qua’è la velocità media?
Siamo tentati di dire che
v =
La velocità media è definita
rispetto al tempo e non rispetto
alla distanza.
30 km
= 1,5 h ;
Poiché Δt1 =
20 km h
20 + 60
= 40 km/h.
2
Δs1 + Δs2
v =
Δt1 + Δt 2
30 km
Δt2 =
= 0,5 h
60 km h
30 + 30
v =
km h = 30 km h
1,5 + 0,5
17
Esempio: Un’automobile percorre 11 km alla velocità media di
75 km/h, ma poi viaggia per il successivo 1 km a una velocità
media di 15 km/h a causa di lavori stradali in corso. Calcolare
la velocità media per l’intero viaggio.
Soluzione:
75 km h + 15 km h
v ≠
= 45. km h
2
perché il viaggio si svolge per la maggior
parte del tempo alla velocità maggiore
Δ stot
12 km
12
v =
=
=
= 56 km h
Δ ttot
0,21
11 km
1 km
+
75 km h 15 km h
18
Moto uniformemente accelerato:
Un corpo si muove di uniformemente accelerato quando l’accelerazione
istantanea è sempre costante in modulo direzione e verso. La velocità
istantanea ha sempre la stessa direzione e verso dell’accelerazione e,
esssendo quest’ultima costante, ne segue che la traiettoria è rettilinea.
v ≡ v(t) = v 0 + at
1 2
s = s0 + v 0t + at
2
19
a
Moto uniformemente vario:
Diagramma orario
a = cost
a
s
0
t
t
v
v
a = tan β
b
v0
0
t
v = v0 + a ⋅ t
t
s
s0
0
t
t
1 2
s = s0 + v0t + at
2
20
Moto circolare uniforme
Il moto circolare uniforme è il moto di un punto che si muove lungo una
circonferenza con velocità costante in modulo (ma non in direzione e verso
perché la tangente alla traiettoria circolare cambia da punto a punto). La
velocità con la quale si muove il punto lungo la circonferenza si dice velocità
tangenziale mentre quella con cui ruota il raggio della circonferenza si
definisce velocità angolare.
P1
P2
v1
R
Δθ
R
O
v2
v1 e v2 sono uguali in modulo
(v1=v2=v), ma differiscono in
direzione e verso
Δθ
ω=
Δt
v = ωR
21
P1
v1
P2
Δs
v2
R Δθ R
O
vist
Δs
= lim
Δt
Δt→0
Esprimiamo lo spostamento in termini
dell’angolo spazzato dal raggio R quando il
corpo si sposta da P1 a P2
Δs = 2R sin(Δθ / 2)
2R sin(Δθ / 2)
vist = lim
Δt
Δt→ 0
sin(Δθ / 2) ≈ Δθ / 2
Nel limite per Δt che tende a zero sinθ~θ
2RΔθ
Δθ
vist = lim
2Δt = Rlim
Δt = 22ωR
Δt→ 0
Δt→ 0
Vettore accelerazione nel moto
circolare uniforme
v1
P2
P1
v2
Δ
v
r
r
θ
O
θ
Δ v = 2vsen
2
v1
θ/2
v2
θ vl
⎯⎯
⎯
⎯
→
2
v
=
Δt → 0
2 r
Δ
v
v1 = v2 = v
v2
v 2 − v1 Δ v
a =
=
t2 − t1
Δt
a P1
Δv
= lim
Δt
Δt →0
l = P1ˆ
P2 =rθ
vl
Δv v l
v2
Δv = ⇒
=
=
r
Δt r Δt r
Accelerazione radiale
a P1
v2
=
r
Vettore Accelerazione
v1
P2
Δvt
P1
Δvn
v2
Δv
v2
a =
Δvt vettore parallelo a v1
Δvt=v2-v1
v 2 − v1 Δv Δv t + Δv n
=
=
t 2 − t1
Δt
Δt
a P1 = lim
Δt → 0
Δv
at = lim
Δt = 0
Δt → 0
v2
an =
R
Δv
Δt
= a t + an
accelerazione tangenziale
accelerazione normale. v = velocità nel punto P e
R = raggio di curvatura istantaneo della traiettoria24in P